Область техники
Изобретение относится к области транспортной техники, в частности к способу создания движущей силы аппарата в текучей среде и устройству для его осуществления, и может быть использовано на судах всех типов и на летательных аппаратах.
Предшествующий уровень техники
Проблема создания аппаратов, использующих в качестве движителя колеблющееся крыло, заключается в том, что до настоящего времени нет ясности в вопросе о характере движения крыла - его траектории и потребных углов атаки на ней, при которых полезная работа его была бы достаточно эффективна. Из живой природы известно, что морские животные и рыбы способны совершать длительное плавание с высокой скоростью при минимальной затрате энергии.
Решение этой проблемы состоит в определении оптимальной траектории движения крыла и необходимых углов атаки на ней и в создании способа получения движущей силы аппарата, заключающегося в том, что крылу придают перемещение по оптимальной траектории с необходимыми углами атаки в каждой точке траектории.
Главной проблемой при создании движителя с колеблющимся крылом является возможность получения потребных углов атаки крыла в процессе его движения, причем во всем диапазоне скоростей движения аппарата. Так при различных режимах движения - трогании с места, разгоне и на крейсерских скоростях - требуются разные углы атаки крыла.
Решение этой проблемы состоит в создании таких устройств, которые обеспечивали бы возможность регулирования и управления углами атаки крыла при работе его в качестве движителя. Желательно также, чтобы была возможность обеспечить на креймерских режимах "наивыгоднейшие" углы атаки крыла, т.е. соответствующие максимальному качеству крыла, когда отношение коэффициента подъемной силы к коэффициенту сопротивления максимально, что дает возможность сводить к минимуму потери энергии.
Известен, например, способ создания движущей силы судна и движитель, осуществляющий этот способ, содержащий крыло, снабженное шарнирно связанным с ним приводом, жестко закрепленном на аппарате и сообщающим крылу сложное колебательное движение перпендикулярное потоку жидкости (см., например, патент FR N 2181223).
Способ создания движущей силы судна заключается в том, что крылу придают возвратно-поступательное перемещение в направлении перпендикулярном к набегающему потоку жидкости и угловое перемещение. Поступательное перемещение совершается по закону y = y0•cos(ωt), а угловое - по закону θ = θ0cos(ωt+π/2),
где y0 - амплитуда поступательного колебания,
ω - частота,
t - время,
θ0 - амплитуда углового колебания.
Однако описанный способ не позволяет получить высокое значение пропульсивного коэффициента, т.к. крыло движется по траектории синусоидального вида, имеющей значительные участки траектории с малым углом наклона, на которых проекция гидродинамических сил на ось движения мала по величине и среднее значение мгновенных величин КПД низко. Углы атаки переменны и могут быть "наивыгоднейшими" (при которых отношение коэффициента подъемной силы к коэффициенту сопротивления максимально) только в одной точке траектории за полпериода колебания, что также снижает среднее значение КПД
У такого движителя изменять силу тяги можно только за счет изменения частоты поступательных колебаний крыла. При этом каждому скоростному режиму судна соответствует определенная частота колебаний крыла. В любой момент времени углы атаки крыла определяется его положением, зависящим только от конструктивных параметров механизма, скоростью перемещения крыла приводом и скоростью движения самого судна.
При таких условиях формирования углов атаки невозможно получать их оптимальные значения на всех режимах движения судна, что неизбежно приводит к неоправданному увеличению затрачиваемой энергии.
Аналогичный способ и движитель для его осуществления описаны в журнале "Катера и яхты" N 2 за 1989 г., стр. 51, рис. 2.
Известен, например, движитель для передвижения в воде с мускульным приводом, содержащий крыло, шарнирно закрепленное на рычаге, совершающее колебательное движение перпендикулярное потоку жидкости. Угловые перемещения крыла осуществляют за счет шарнирной подвески и наличием люфта между регулируемыми упорами (см., например, патент US N 3426722).
По желанию пловца величина люфта может регулироваться, т.е. предполагается возможность подбирать углы атаки крыла, работающего в качестве движителя.
В любой момент времени угол атаки крыла зависит от его положения, определяемого конструктивными параметрами движителя, т.е. от положения упора и от положения рычага, на котором закреплено крыло, от скорости перемещения крыла приводом (пловцом) и от получаемой при этом скорости движения самого аппарата.
При таких условиях формирования углов атаки получать их оптимальные значения задача сложная и трудновыполнимая.
При возвратно-поступательных перемещениях крыла около крайних положений, во время изменения направления движения происходит пассивный поворот от одного упора до другого, при этом крыло создает только создает только сопротивление, а сила тяги отсутствует, что приводит к увеличению потерь затрачиваемой энергии.
Раскрытие изобретения
Задачей настоящего изобретения является создание такого способа получения движущей силы аппарата в текучей среде и движителя для его осуществления, который за счет использования оптимальной траектории движения крыла и обеспечения потребных углов атаки на этой траектории при любых режимах движения аппарата обеспечил бы значительное повышение пропульсивного коэффициента.
Эта задача решается, что в способе создания движущей силы аппарата, снабженного по меньшей мере одним крылом, в текучей среде, крылу придают возвратно-поступательное перемещение в направлении под углом к набегающему потоку текучей среды и угловое перемещение, согласно изобретению, крыло аппарата перемещают под углом от около 50o до около 130o к набегающему потоку текучей среды со скоростью по величине составляющей соответственно примерно от 0,1 до 12 скорости самого аппарата, сообщаемой ему этим крылом и с постоянным углом атаки.
Это значительно повышает эффективность работы крыла в качестве движителя.
Целесообразно возвратно-поступательное перемещение крылу придавать в направлении перпендикулярном набегающему потоку текучей среды.
Это позволяет повысить КПД крыла как движителя.
Выгодное всего крыло перемещать со скоростью примерно равной скорости движения самого аппарата.
При этом КПД крыла как движителя максимально.
При наличии двух крыльев, им придают одновременно движение в противофазе, чтобы избежать нежелательные колебания аппарата.
Эта задача решается также тем, что в движителе для создания движущей силы аппарата, помещенного в поток текучей среды, снабженного по меньшей мере одним крылом, шарнирно связанным с приводом, жестко закрепленном на аппарате, и сообщающим крылу возвратно-поступательное движение относительно направления движения потока текучей среды согласно изобретению крыло аппарата снабжено устройством управления его углом атаки, связанным с этим углом.
Это обеспечивает значительное повышение пропульсивного коэффициента.
Возможно устройство управления углом атаки выполнить в виде крыловидного элемента, жестко связанного с самим крылом.
Это позволяет упростить конструкцию устройства.
Целесообразно крыловидный элемент шарнирно связать с крылом и снабдить собственным приводом для управления его угловым положением относительно крыла.
Это дает возможность обеспечить необходимые углы атаки крыла при работе его в качестве движителя на любых режимах движения аппарата.
Краткое описание чертежей
в дальнейшем патентуемое изобретение поясняется конкретными примерами его выполнения и прилагаемыми чертежами, на которых
фиг. 1 изображает аппарат с движителем, в виде крыла для создания движущей силы, согласно изобретению;
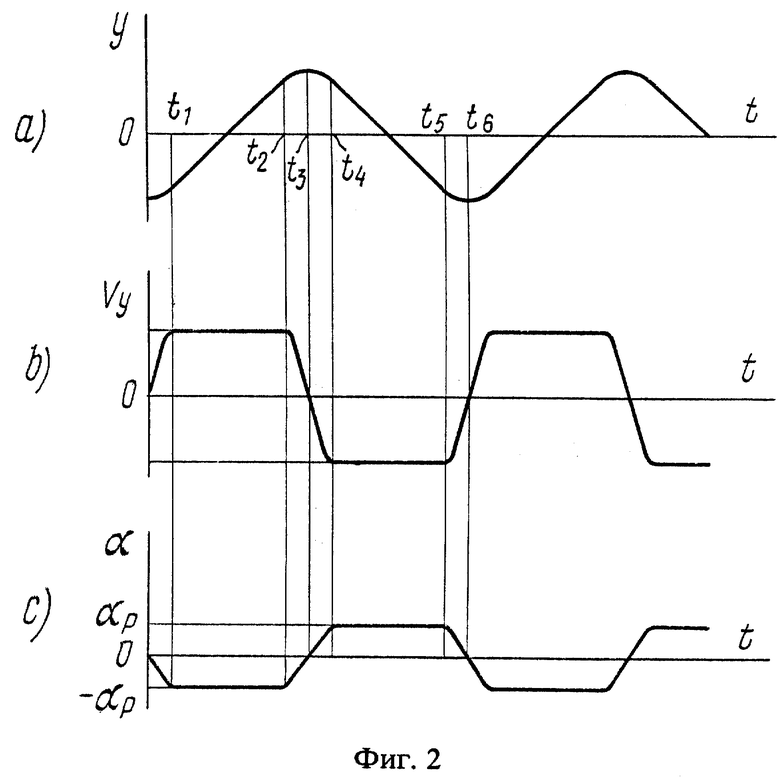
фиг. 2a изображает график зависимости перемещения крыла от времени, согласно изобретению;
фиг. 2b изображает график изменения скорости перемещения крыла от времени, согласно изобретению;
фиг. 2c изображает график зависимости угла атаки крыла от времени, согласно изобретению;
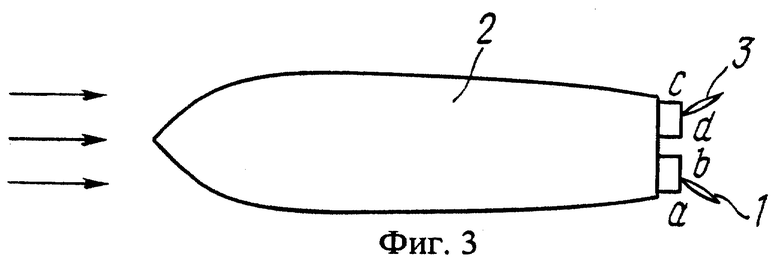
фиг. 3 изображает аппарат с движителем в виде двух крыльев двигающихся в противофазе, согласно изобретению;
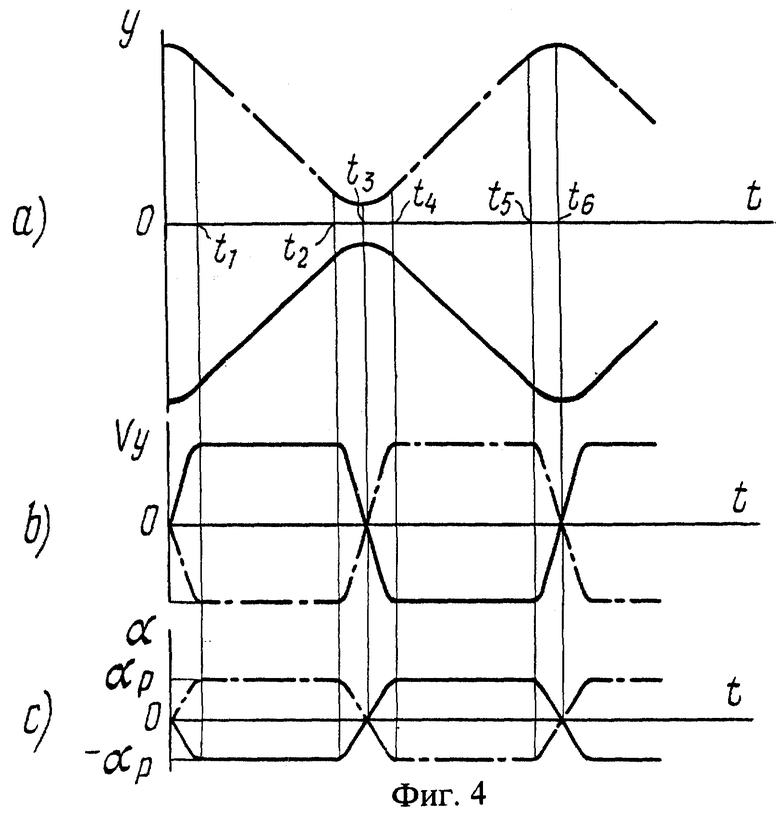
фиг. 4a изображает графики зависимостей перемещений крыльев от времени, согласно изобретению;
фиг. 4b изображает графики изменения скоростей перемещений крыльев от времени, согласно изобретению;
фиг. 4c изображает графики зависимости углов атаки крыльев от времени, согласно изобретению;
фиг. 5 изображает крыло в потоке текучей среды и векторы скоростей крыла и сил, действующих на него во время движения, согласно изобретению;
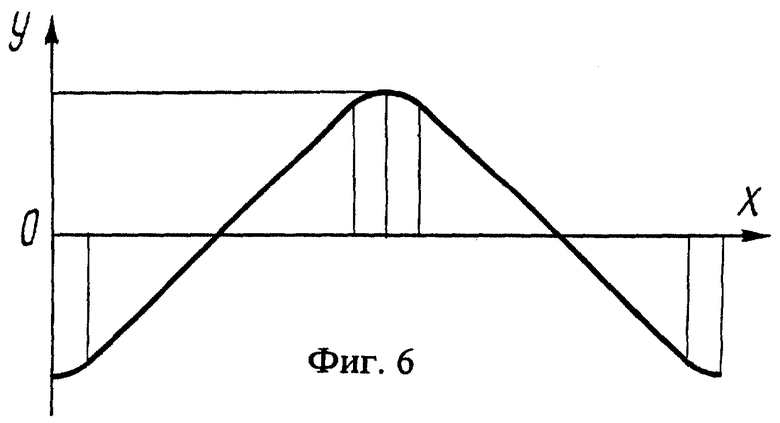
фиг. 6 изображает траекторию движения крыла, согласно изобретению;
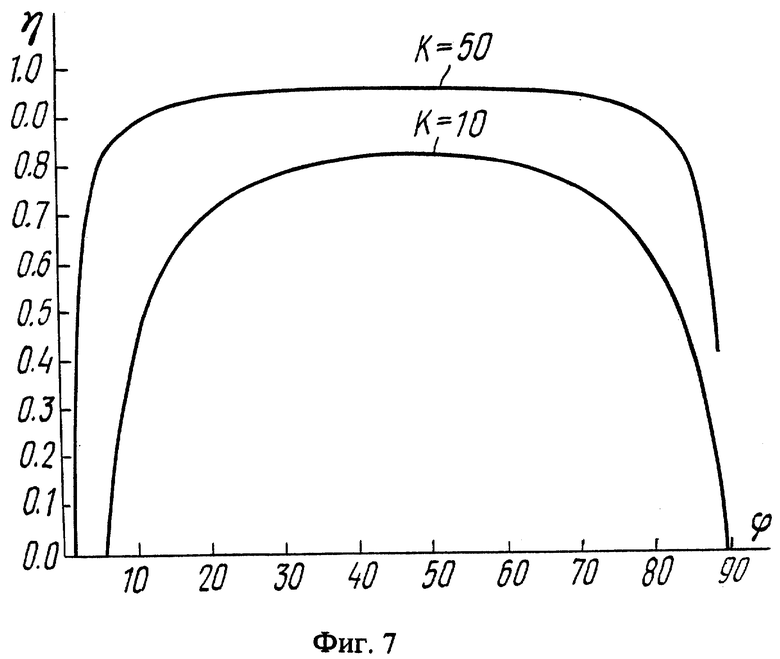
фиг. 7 изображает график зависимости КПД от различных углов наклона траектории, согласно изобретению;
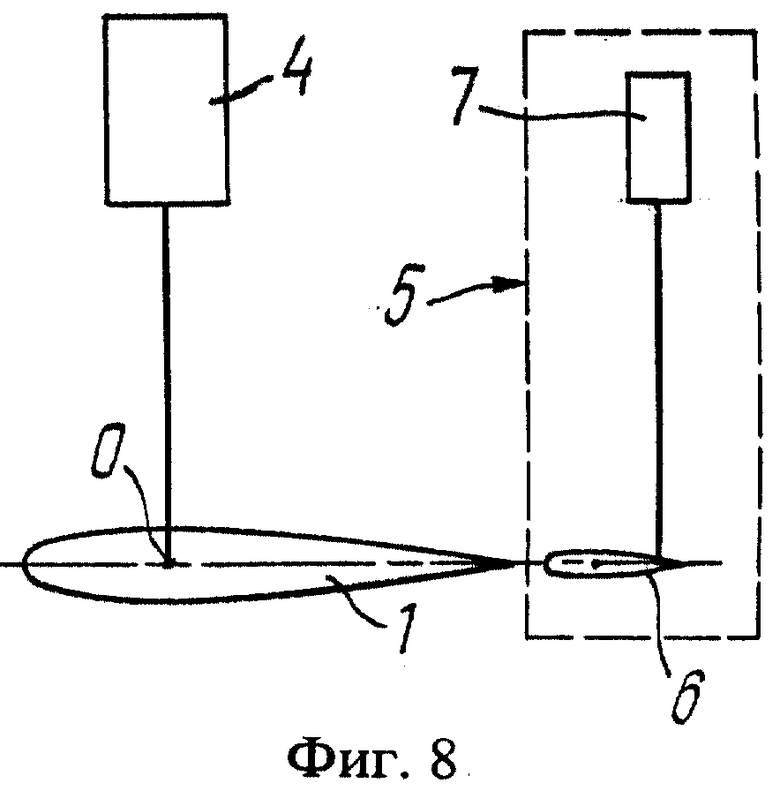
фиг. 8 изображает движитель аппарата с устройством управления углом атаки крыла, согласно изобретению;
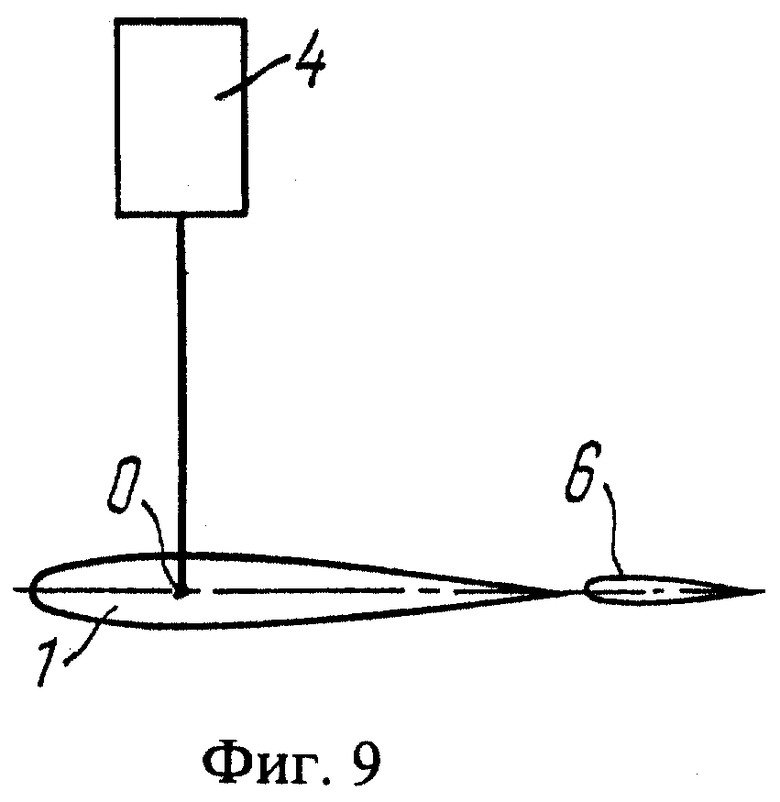
фиг. 9 изображает движитель аппарата с крыловидным элементом жестко связанным с крылом, согласно изобретению;
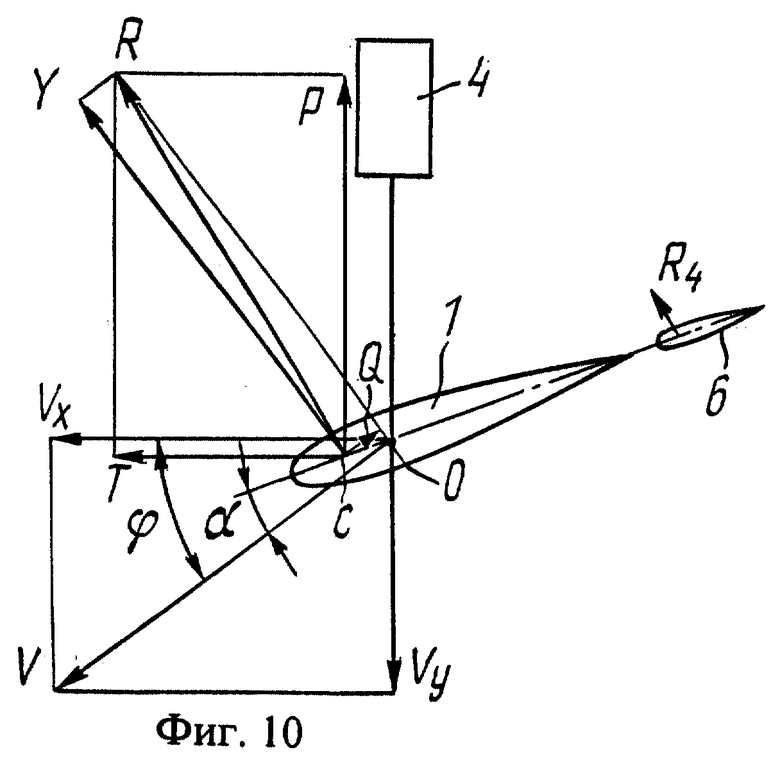
фиг. 10 изображает векторы скоростей крыла с крыловидным элементом, жестко связанным с самим крылом, и сил действующих на них во время движения, согласно изобретению;
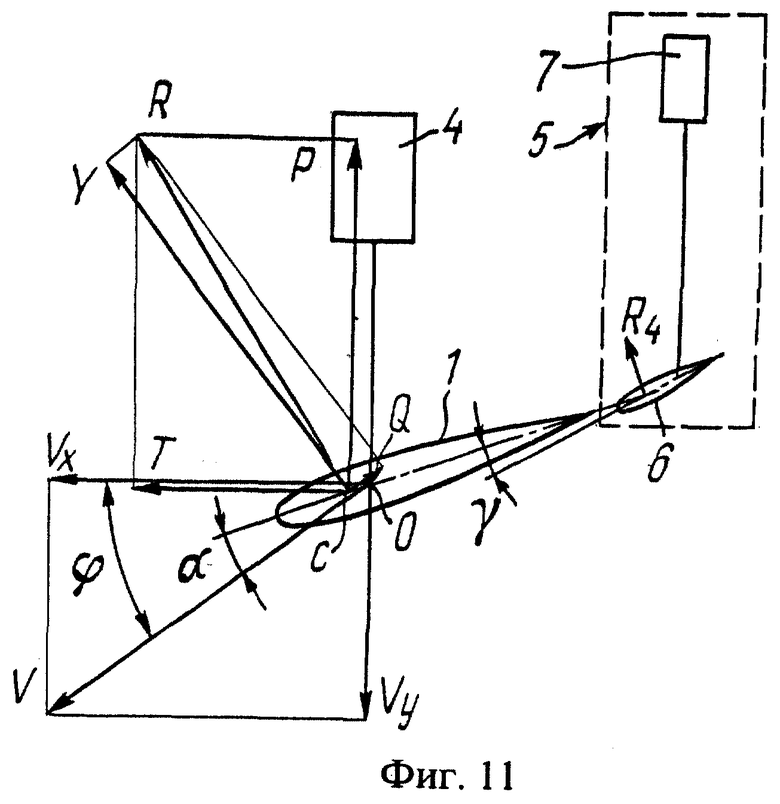
фиг. 11 изображает векторы скоростей крыла с устройством управления углом атаки и сил действующих на них во время движения, согласно изобретению.
Лучший вариант осуществления изобретения
Способ создания движущей силы аппарата, снабженного по меньшей мере одним крылом, в текучей среде состоит из следующих операций.
Крыло 1 (фиг. 1) из крайнего положения "a" перемещают в направлении, указанном стрелкой "A", под углом Φ к набегающему потоку текучей среды, разгоняя его до скорости Vy по величине, равной примерно от 0,1 до 12 скорости Vx движения самого аппарата 2. При скорости перемещения крыла 1 менее 0,1 скорости движения самого аппарата 2 полезная мощность Np составляет менее 0,7 от затрачиваемой мощности Nq (при K=50), то же самое происходит и при скорости перемещения крыла 1, превышающей примерно в 12 раз скорость движения самого аппарата 2. При этом изменяют угол α атаки крыла 1 до 0o до αp (см. фиг. 2a, 2b, 2c отрезок 0, t1).
Затем продолжают перемещение крыла 1 со скоростью Vy и углом α атаки, равным αp. В это время реализуется основной рабочий режим (см. фиг. 2a, 2b, 2c отрезок t1, t2).
Около другого крайнего положения "b" скорость Vy перемещения крыла 1 замедляют до 0 и изменяют 0 угол α атаки до 0o (см. фиг. 2a, 2b, 2c отрезок t2, t3).
Далее крыло 1 перемещают в обратном направлении от положения "b" до положения "a", обозначенном стрелкой "B", аналогично тому, как описано выше (см. фиг. 2a, 2b, 2c отрезок t3, t6).
После чего цикл повторяют.
Однако оптимальным является возвратно-поступательное перемещение крыла 1 перпендикулярное к набегающему потоку текучей среды, т.е. под углом 90o.
При этом оптимальная скорость Vy перемещения крыла 1 примерно равна скорости Vx движения самого аппарата 2
Vy≈Vx. (1)
При этом оптимальным является угол α атаки, при котором "качество" K крыла максимально, т.е. при котором отношение коэффициента подъемной силы Cy к коэффициенту сопротивления Cx имеет максимальное значение:
K=Cy/Cx, (2)
где Cy - коэффициент подъемной силы крыла,
Cx - коэффициент сопротивления крыла.
Если аппарат снабжен двумя крыльями, например 1 и 3 (фиг. 3), то способ создания движущей силы осуществляется следующим образом.
Крыло 1 из крайнего положения "a", а крыло 3 из крайнего положения "c" перемещают навстречу друг другу, разгоняя каждое до скорости Vy по величине, равной примерно от 0,1 до 12 скорости движения самого аппарата 2. При этом изменяют угол α атаки крыла 1 от 0o до +αp , а угол α атаки крыла 3 от 0o -αp (см. фиг. 4a, 4b, 4c отрезок 0, t1).
Затем продолжают перемещение крыльев 1 и 3 навстречу друг другу со скоростью Vy и углами α атаки, соответственно равными +αp и -αp. В это время реализуется основной рабочий режим (см. фиг. 4a, 4b, 4c отрезок t1, t2).
Около крайних положений "d" и "d" скорость Vy перемещения крыльев 1 и 3 замедляют до 0 и изменяют углы α атаки обоих крыльев до 0o (см. фиг. 4a, 4b, 4c, отрезок t2, t3).
Далее крыло 1 перемещают от положения "b" дот положения "a", а крыло 3 перемещают от положения "d" до положения "c" аналогично тому, как описано выше (см. фиг. 4a, 4b, 4c отрезок t3, t6).
После чего цикл повторяют.
Вышеизложенное вытекает из следующего.
Рассмотрим крыло 1 (фиг. 5) в потоке текучей среды, которое принудительно перемещают перпендикулярно этому потоку, и пусть в данный момент времени эта скорость  перемещения крыла постоянна. Скорость
перемещения крыла постоянна. Скорость  крыла относительно текучей среды равна
крыла относительно текучей среды равна
где  - горизонтальная скорость крыла 1.
- горизонтальная скорость крыла 1.
Направление этой скорости  определится отношением
определится отношением
tgΦ = Vy/Vx. (4)
где  - угол между вектором скорости
- угол между вектором скорости  и вектором скорости
и вектором скорости  .
.
На крыле, движущемся в текучей среде с углом α атаки, возникает сила R. При разложении ее на составляющие по потоку текучей среды и перпендикулярно ему, получим
T = R•sin(Φ-β), (5)
P = R•cos(Φ-β), (6)
где β - угол между силой R и подъемной силой крыла Y,
T - сила тяги,
P - сила, затрачиваемая на перемещение крыла.
Мгновенное значение мощности Na, затрачиваемой на перемещение крыла, равно
Nz=P•Yy. (7)
Мгновенное значение полезной мощности Np равно
Np=T•Vx. (8)
Мгновенное значение КПД η в данный момент будет
η = Np/Na=T•Vx/P•Vy. (9)
Далее из фиг. 5 видно, что
T/P = tg(Φ-β) (10)
и учитывая (4), мгновенное значение КПД η полуим в виде
η = tg(Φ-β)/tgΦ (11)
Максимальное значение КПД η получается для угла Φ* наклона траектории движения крыла.
Φ*= π/4+β/2 (12)
(Аналогичный вывод для элемента лопасти винта см. "Fuhrer durch die stromungslehre", von Dr.Ludwig Prandtl, 1994, Ab. III, 20).
Так при K = 10 - 50
η = 0,8 - 0,96. (13)
Из вышеизложенного можно сделать вывод: работа крыла в качестве движителя эффективнее тогда, когда траектория его движения имеет угол Φ наклона, приблизительно равный 45o, и при максимальном K крыла.
Следовательно, траектория движения крыла должна состоять из прямолинейных участков с углами Φ наклона, приблизительно равными 45o, т.е. иметь вид пилы со скругленными углами, т.к. необходимо определенное время для разгона и торможения крыла, а главное, для перемены знака циркуляции на крыле.
На фиг. 6 изображена траектория движения крыла 1, где по оси y - перемещение крыла 1 перпендикулярно потоку, а по оси x - горизонтальное перемещение крыла 1.
Графики зависимостей КПД η от угла  наклона траектории при K=10 и при K= 50, изображенные на фиг. 7, имеют слабо выраженный максимум, и потому довольно высокое значение КПД η сохраняется в широком диапазоне углов Φ наклона траектории.
наклона траектории при K=10 и при K= 50, изображенные на фиг. 7, имеют слабо выраженный максимум, и потому довольно высокое значение КПД η сохраняется в широком диапазоне углов Φ наклона траектории.
Заставить крыло 1 (фиг. 1) перемещаться по оптимальной траектории с потребными углами атаки, осуществляя таким образом вышеописанный способ создания движущей силы аппарата можно используя различные технические средства.
Однако одним из наиболее простых и надежных технических средств на современном уровне техники является патентуемый движитель (см. фиг. 8), который содержит по меньшей мере одно крыло 1, привод 4, сообщающий крылу 1 возвратно-поступательное движение в направлении под углом к набегающему потоку текучей среды, и устройство 5 управления углом α атаки крыла 1, связанное с ним. Крыло 1 шарнирно связано по оси "O" с приводом 4, который жестко закреплен на аппарате (на фиг. 8 не показан).
При наличии двух крыльев, им целесообразно придавать возвратно-поступательные движения в противофазе, чтобы избежать возможные нежелательные колебания аппарата.
Устройство 5 управления углом α атаки крыла 1 может представлять собой по меньшей мере один крыловидный элемент 6 (фиг. 9). Этот крыловидный элемент 6 может быть жестко связан с самим крылом 1.
Крыловидный элемент 6 (фиг. 8) может быть шарнирно связан с крылом 1, и в этом случае он снабжен собственным приводом 7, предназначенным для управления его угловым положением.
Хотя на фигурах представлен один крыловидный элемент 6, следует указать на то, что их может быть и больше, например два.
На фиг. 10 изображено крыло 1 с крыловидным элементом 6 аппарата, который движется со скоростью Vz в текучей среде. Крыловидный элемент 6 жестко связан с крылом 1. Крыло 1 перемещается приводом 4 со скоростью Vy. Скорость перемещения крыла 1 в текучей среде равна V. Сила R, действующая на крыло 1 со стороны текучей среды, разложена на две пары составляющих: T - по направлению движения аппарата и нормальную составляющую P; Y - подъемную силу крыла 1 и Q - силу сопротивления. Центр "C" давления крыла 1 лежит впереди оси "O" шарнира. На крыловидный элемент 6 со стороны текучей среды действует сила R4.
На фиг. 11 изображено крыло 1 с устройством 5 управления его углом α атаки аппарата, который движется со скоростью Vx в текучей среде. Устройство 5 управления углом α атаки представляет собой крыловидный элемент 6, шарнирно связанный с самим крылом 1 и снабженный собственным приводом 7. Крыло 1 с устройством 5 управления углом α атаки перемещается приводом 4 со скоростью Vy. Скорость перемещения крыла 1 с устройством 5 управления углом α атаки в текучей среде равна V. Сила R, действующая на крыло 1 со стороны текучей среды, разложена на две пары составляющие: T - по направлению движения аппарата и нормальную составляющую P; Y - подъемную силу крыла 1 и Q - силу сопротивления. На крыловидный элемент 6 со стороны текучей среды действует сила R4.
Заявляемый движитель для создания движущей силы аппарата работает следующим образом.
Аппарат движется в текучей среде со скоростью Vx. Привод 4, жестко закрепленный на аппарате, сообщает крылу 1 возвратно-поступательное движение.
Крыло 1 (фиг. 10) с крыловидным элементом 6, жестко связанным с ним, перемещается с помощью привода 4 со скоростью Vy. Скорость  точки, принадлежащий оси "O" шарнирной подвески крыла 1, относительно текучей среды равна
точки, принадлежащий оси "O" шарнирной подвески крыла 1, относительно текучей среды равна
Центр "C" давления крыла 1 расположен впереди оси "O" шарнира. Крыло 1 с крыловидным элементом 6 устанавливается в такое положение, в котором момент относительно оси "O" от силы R на крыле 1 уравновешивается силой R4 крыловидного элемента 6. Угол α атаки, соответствующий этому положению, зависит от конструктивных параметров крыла 1 с крыловидным элементом 6 и не зависит от угла Φ наклона траектории движения крыла 1 (т.е. траектории точки "O" его подвески).
На крыле 1, движущемся в текучей среде с углом α атаки, возникает сила R. Разложим ее на составляющие по потоку текучей среды T и перпендикулярно ему P. Составляющая T определяет тягу крыла 1, а составляющая P определяет силу сопротивления приводу 4.
При перемене направления движения крыла 1 приводом 4 происходит поворот вектора скорости  . Появляется момент от сил R и R4, который меняет угол α атаки крыла 1 на противоположный, и вектор силы T тяги сохранит свое направление.
. Появляется момент от сил R и R4, который меняет угол α атаки крыла 1 на противоположный, и вектор силы T тяги сохранит свое направление.
Таким образом, крыло 1 с крыловидным элементом 6, шарнирно связанное с приводом 4, при возвратно-поступательном перемещении в потоке текучей среды выдерживает угол α атаки, который не зависит от угла Φ наклона траектории движения крыла, а зависит от конструктивных параметров крыла 1 с крыловидным элементом 6.
Крыло 1 с крыловидным элементом 6, жестко связанным с ним, может использоваться на аппаратах, полностью погруженных в текучую среду, например подводных. Так как сопротивление тела, полностью погруженного в текучую среду, пропорционально квадрату скорости движения, а при таких условиях на всех режимах движения требуются одни и те же углы α атаки крыла.
Крыло 1 (фиг. 11) с устройством 5 управления углом α атаки, выполненным в виде крыловидного элемента 6, шарнирно связанного с самим крылом 1 и снабженного собственным приводом 7, перемещается с помощью привода 4 со скоростью Vy. Скорость  точки, принадлежащей оси "O" шарнирной подвески крыла 1, относительно текучей среды равна
точки, принадлежащей оси "O" шарнирной подвески крыла 1, относительно текучей среды равна
Положение системы - крыло 1 с крыловидным элементом 6 в потоке текучей среды определяется угловым положением крыловидного элемента 6 относительно крыла 1. Эта система устанавливается в потоке текучей среды так, что момент относительно оси "O" от сил R и R4, действующих на крыло 1 и крыловидный элемент 6 со стороны текучей среды, равен 0. При этом система - крыло 1 крыловидным элементом 6, находится в равновесии. Величина угла α атаки крыла 1 определяется величиной установочного угла γ крыловидного элемента 6 относительно крыла 1.
Изменяя величину установочного угла γ крыловидного элемента 6 изменяют положение системы - крыло 1 с крыловидным элементом 6 в потоке текучей среды. Устанавливается новое равновесное положение, которому соответствует новый угол α атаки крыла. Таким образом осуществляют управление углом α атаки крыла 1.
При отклонении системы - крыло 1 с крыловидным элементом 6 от равновесного положения, на крыловидном элементе 6 возникает восстанавливающий момент, который возвращает систему - крыло 1 с крыловидным элементом 6 в исходное равновесное состояние. Таким образом осуществляется стабилизация системы - крыло 1 с крыловидным элементом 6 в потоке текучей среды.
Привод 4 сообщает крылу 1 возвратно-поступательное движение, поэтому при перемене направления движения крыла 1, чтобы вектор силы T тяги сохранил свое направление, изменяют установочный угол γ крыловидного элемента 6 относительно крыла 1 на противоположный по знаку. При этом угол α атаки крыла 1 и сила P изменяется на противоположные, а вектор силы T тяги сохранит свое направление.
Таким образом заявляемый движитель обеспечивает возможность регулирования и управления углами α атаки крыла 1. Это позволяет получить потребные значения углов α атаки крыла 1 при различных режимах движения аппарата, что дает возможность сводить к минимуму потери энергии.
Промышленная применимость
Из вышеизложенного видно, что заявляемый способ создания движущей силы имеет КПД выше 80%, в то время как у своевременных судовых движителей-винтов КПД составляет 55-60%. Использование заявляемого способа дает значительную экономию энергетических ресурсов.
Заявляемый движитель может быть применен для судов любого типа, от маломерного флота до океанских лайнеров, т.к. обладает приемственностью к любой конструкции судна. Устройство можно оснащать как уже существующие суда с соответствующей модернизацией, так и проектируемые вновь.
Оно может заменять винт на судах, который на современном этапе уже недостаточно эффективен.
Заявляемый движитель обладает более высокими качественными характеристиками, т. к. одним из главных его преимуществ является регулирование углов атаки крыла, это означает, что высокое значение КПД устройства реализуется на всех режимах, что приводит к существенному сокращению потребных энергетических ресурсов.
Патентуемый способ создания движущей силы аппарата и движитель для его осуществления обладает следующими преимуществами:
- значительно более высоким КПД по сравнению с существующими движителями аппаратов в текучей среде;
- высокой маневренностью аппарата, снабженного заявляемым движителем, как при больших, так и при малых скоростях движения, т.к. при вертикальном положении крыло-движитель может использоваться как активный руль;
- заменой вращательного движения рабочего органа (например, винта) на поступательное, что позволяет отказаться от преобразования поступательного движения во вращательное в традиционных двигателях;
- улучшенными экологическими свойствами за счет уменьшения гидродинамического шума (т.к. потребная скорость движения крыла лишь в 1,4 раза больше скорости судна, а окружная скорость конца лопасти винта в 10-20 раз превышает скорость судна) и уменьшения возмущения водной среды, что благоприятно для флоры и фауны.

Способ создания движущей силы аппарата, снабженного по меньшей мере одним крылом, в текучей среде заключается в том, что крылу одновременно придают возвратно-поступательное перемещение в направлении под углом примерно от 50 до 130° к набегающему потоку текучей среды и угловое перемещение. Скорость перемещения составляет примерно от 0,1 до 12 скорости движения самого аппарата, сообщаемого ему этим крылом, при этом угол атаки сохраняется постоянным. Движитель для осуществления этого способа содержит по меньшей мере одно крыло, снабженное шарнирно связанным с ним приводом, жестко закрепленным на аппарате и сообщающим крылу возвратно-поступательное движение относительно направления движения потока текучей среды. Крыло аппарата снабжено устройством управления его углом атаки, связанным с этим крылом. Достигается повышение пропульсивного коэффициента движителя. 2 с. и 5 з.п. ф-лы, 11 ил.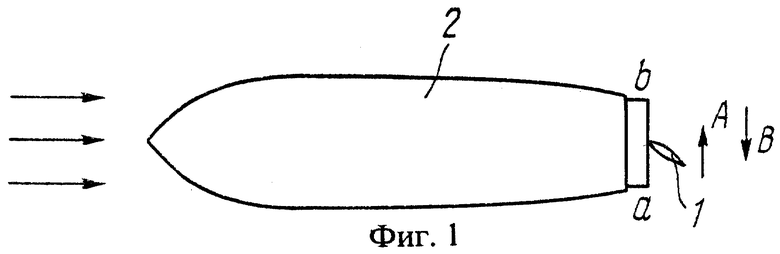
| US 4371347 A 01.02.1983 | |||
| УСОВЕРШЕНСТВОВАННАЯ ГАЗОВАЯ ГОРЕЛКА | 2015 |
|
RU2669886C1 |
| Водометный движитель | 1977 |
|
SU707514A3 |
| Устройство для отмера длин сортиментов при раскряжевке хлыстов | 1988 |
|
SU1583292A1 |

