Уровень техники
Настоящее изобретение относится к многопоточному редуктору, а более конкретно к редуктору с разделением потока крутящего момента на множество потоков для летательного аппарата.
Система редуктора передает мощность от газотурбинного двигателя на винт или пропеллер летательного аппарата. Типичная система может направлять мощность от нескольких газотурбинных двигателей на один винт или пропеллер. Поскольку частота вращения винта или пропеллера существенно ниже частоты вращения газотурбинного двигателя, частоту вращения газотурбинного двигателя необходимо понизить с помощью системы редуктора. При понижении выходной частоты вращения газотурбинного двигателя крутящий момент увеличивается посредством ряда промежуточных ступеней и валов редуктора перед выходом конечной передачи на винт или пропеллер.
Одна система по предшествующему уровню техники включает в себя некоторое количество зубчатых колес, расположенных с возможностью разделения потока крутящего момента. Крутящий момент, обычно передающийся однопоточной зубчатой передачей, передается по двум зубчатым передачам для разделения тем самым исходного потока крутящего момента, передающегося зубчатой передачей. Комбинированная масса этих двух разделенных потоков крутящего момента меньше массы одного исходного потока зубчатой передачи. Несмотря на то, что эта система разделения потока крутящего момента по предшествующему уровню техники в некоторых ситуациях смогла увеличить отношение мощность в лошадиных силах/масса, особенно когда общая используемая мощность в лошадиных силах была существенной, и имелось множество входных потоков привода разных двигателей, такой традиционный подход, тем не менее, требует относительно объемной системы с относительно существенной массой.
Многие традиционные системы редукторов и системы с разделением потока крутящего момента являются тяжеловесными и объемными из-за неравномерного распределения нагрузки. Неравномерное распределение нагрузки происходит, когда система редуктора не единообразно разделяет нагрузку. Это требует увеличения размеров каждого зубчатого колеса выше оптимального с тем, чтобы обеспечить возможность соразмерной нагрузки даже при отсутствии единообразного разделения нагрузки.
Кроме того, типичные системы редукторов с разделением потока крутящего момента, несмотря на свою эффективность, обычно предназначены для одной платформы летательных аппаратов из-за относительно большого объема, необходимо присущего таким традиционным конструкциям. Каждая платформа летательных аппаратов должна проектироваться с учетом конкретного положения двигателей, соединенных с конкретной системой редуктора.
Соответственно, желательно предусмотреть систему редуктора с разделением потока крутящего момента на множество потоков, являющуюся относительно несложной и недорогой в производстве, имеющую меньшую массу и габариты, обеспечивающую равномерное распределение нагрузок, включающую в себя независимые резервированные потоки нагрузок и в то же время обладающую способностью к адаптации к различным платформам летательных аппаратов.
Сущность изобретения
В соответствии с настоящим изобретением система редуктора с разделением потока крутящего момента на множество потоков предусматривает множество многопоточных трехступенчатых модулей силовой зубчатой передачи, каждый из которых передает крутящий момент от высокооборотного двигателя на общий вал несущего винта. В каждом модуле разделения потока крутящего момента первая ступень включает в себя спиральнозубую коническую зубчатую передачу; вторая ступень включает в себя прямозубую цилиндрическую зубчатую передачу; а третья ступень включает в себя шевронную зубчатую передачу.
Каждый модуль разделения потока крутящего момента приводится в движение высокооборотным входным валом газотурбинного двигателя. На первой ступени входной вал вращается вокруг оси вращения входного вала, при этом на валу установлено малое коническое зубчатое колесо, находящееся в зацеплении с плоским коническим зубчатым колесом, образуя первую коническую зубчатую передачу. Плоское коническое зубчатое колесо установлено на валу первой ступени, который вращается вокруг оси вращения. Вал первой ступени расположен над последним выходным зубчатым колесом и, по меньшей мере, частично в пределах его периметра для обеспечения компактной компоновки.
Такое расположение высокооборотного входа преимущественно позволяет размещать двигатели в разных положениях по всем осям. То есть угол зацепления усеченного конуса в конической передаче придется менять только для изменения положения двигателя на оси Z или по вертикали относительно системы редуктора. Коническая передача также может располагаться в любом положении по азимуту на плоском коническом зубчатом колесе, чтобы приспособить двигатель в любых монтажных положениях по осям Х и Y относительно системы редуктора.
На второй ступени рядом с периметром выходного зубчатого колеса последней ступени с возможностью вращения вокруг соответствующих осей установлено множество узлов полых валов. Такое расположение позволяет устанавливать каждый узел полого вала в одной общей плоскости так, что их легко разместить в относительно плоском корпусе редуктора. Узлы полых валов вращаются с эквивалентной частотой и включают в себя полый вал, обладающий торсионной гибкостью и угловой податливостью для обеспечения необходимой синхронизации для узла редуктора, в то же время поддерживая правильное распределение нагрузки при работе редуктора. Узлы полых валов, как часть второй ступени редуцирования, обеспечивают равный баланс нагрузки между всеми зубчатыми колесами силовой передачи.
На третьей ступени каждый узел полого вала включает в себя первое и второе косозубое цилиндрическое зубчатое колесо, находящиеся в зацеплении с последним выходным зубчатым колесом. Каждый модуль разделения потока крутящего момента тем самым передает мощность от одного высокооборотного входного вала на множество зубчатых зацеплений с последним выходным зубчатым колесом для существенной передачи крутящего момента, что обычно является желательным в варианте винтокрылого летательного аппарата большой грузоподъемности в относительно плоской системе редуктора для создания множества потоков нагрузки, где отказ одного модуля не приводит к отказу всей системы.
Таким образом, согласно настоящему изобретению предлагается система редуктора с разделением потока крутящего момента на множество потоков, являющаяся относительно несложной и недорогой в производстве, имеющая меньшую массу и габариты, обеспечивающая равное разделение нагрузок, включающая в себя резервированные потоки нагрузок, и в то же время адаптируемая к различным платформам летательных аппаратов.
Краткое описание чертежей
Различные признаки и преимущества настоящего изобретения будут очевидны специалистам в данной области техники из нижеследующего подробного описания предпочтительного в настоящее время варианта осуществления. Чертежи, которые прилагаются к подробному описанию, можно кратко описать следующим образом:
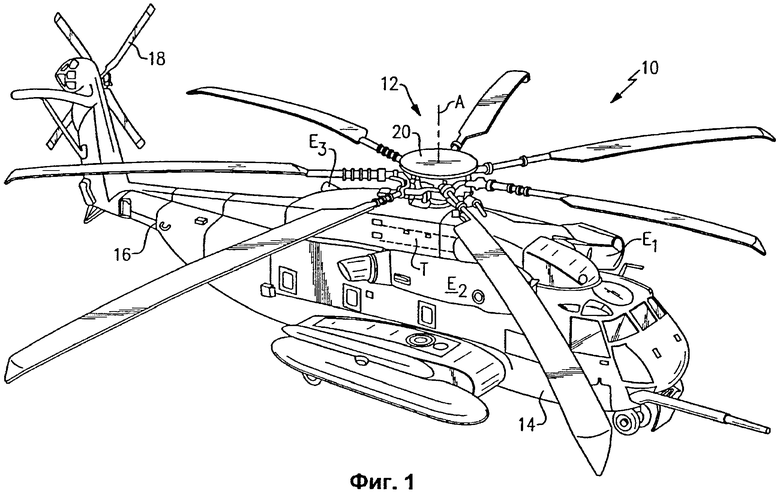
фиг.1 - общий вид в перспективе иллюстративного варианта винтокрылого летательного аппарата для использования с настоящим изобретением;
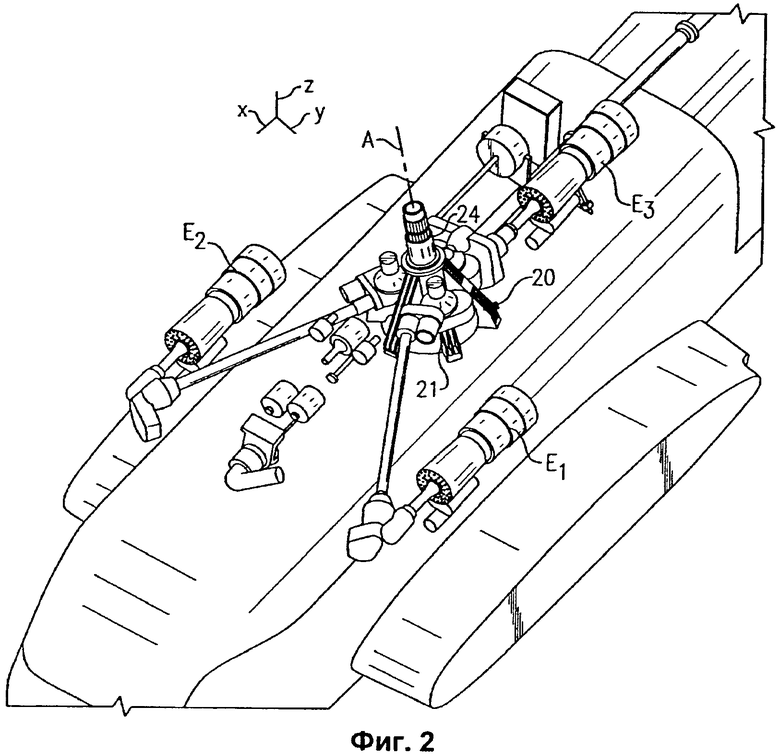
фиг.2 - частично фантомное изображение иллюстративного варианта винтокрылого летательного аппарата, иллюстрирующее его трансмиссию;
фиг.3 - вид в перспективе системы редуктора по настоящему изобретению;
фиг.4 - вид в перспективе системы редуктора по фиг.3 с увеличенным изображением одного модуля разделения потока крутящего момента по настоящему изобретению;
фиг.5 - вид сверху системы редуктора по настоящему изобретению;
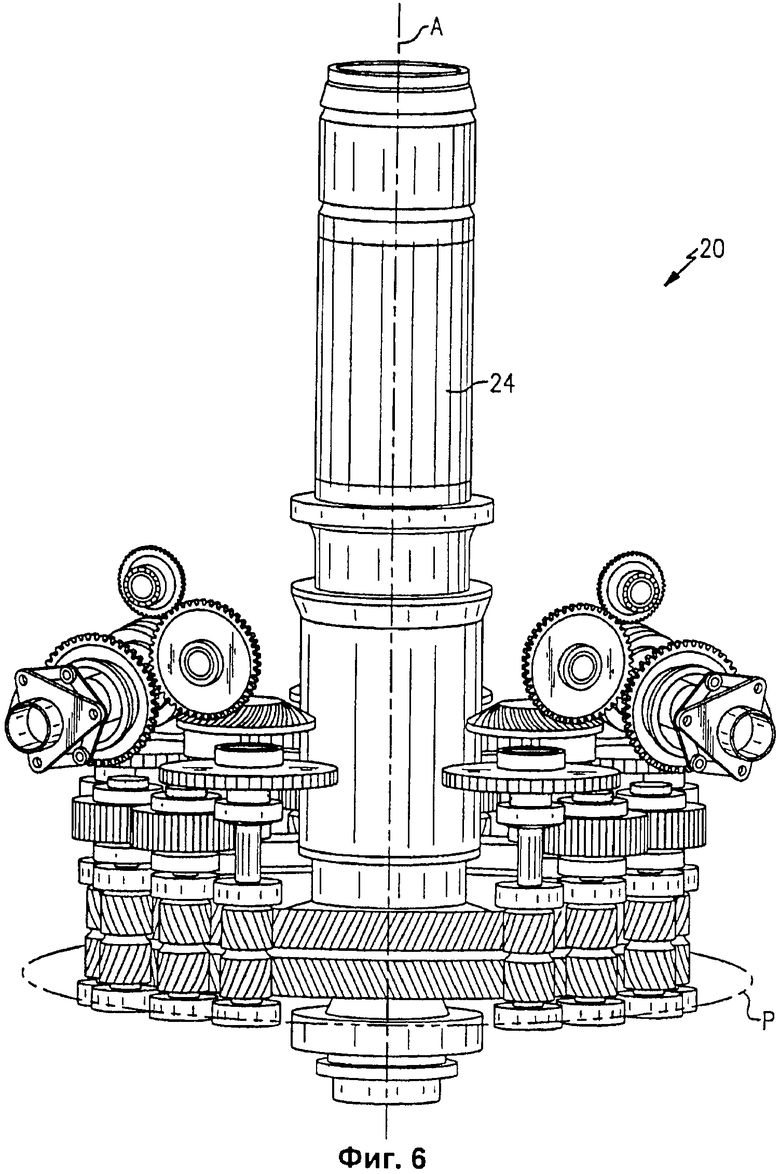
Фиг.6 - боковая косая проекция системы редуктора по настоящему изобретению;
фиг.7 - частично фантомный вид одного модуля разделения потока крутящего момента по фиг.4 для иллюстрации полых валов, установленных в нем;
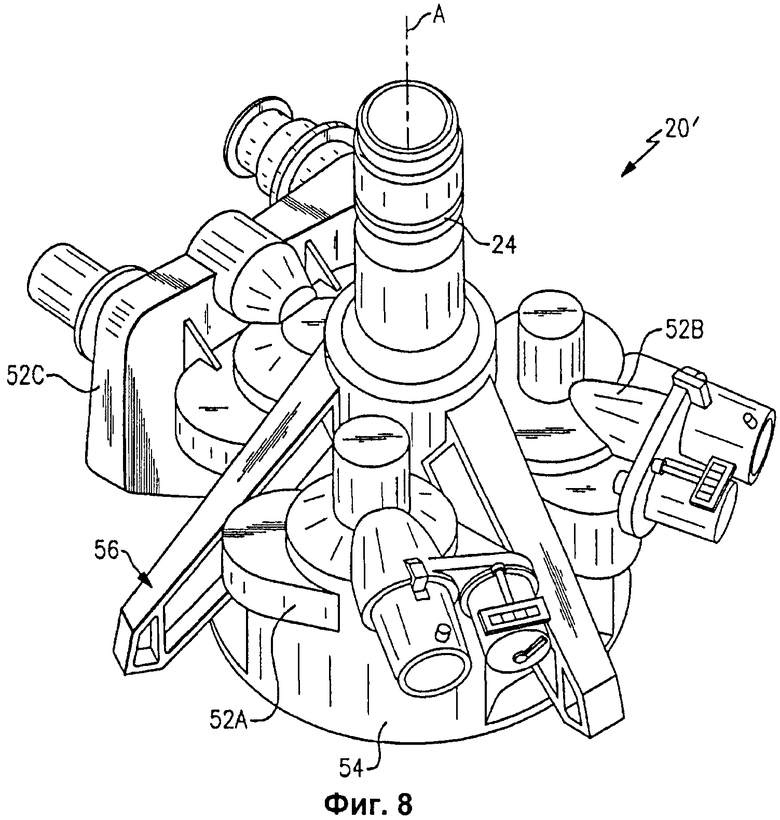
фиг.8 - вид в перспективе системы редуктора с разделением потока крутящего момента с другим расположением корпуса по настоящему изобретению.
Подробное описание предпочтительного варианта осуществления
На фиг.1 схематически показан винтокрылый летательный аппарат 10, имеющий узел 12 несущего винта. Летательный аппарат 10 включает в себя корпус 14 летательного аппарата, имеющий удлиненную хвостовую часть 16, на которой установлен рулевой винт 18. Узел 12 несущего винта приводится в движение вокруг оси А вращения винта через систему 20 редуктора одним или более двигателем Е. Следует понимать, что конфигурация вертолета Сикорский СН-53, показанная в раскрытом варианте воплощения, предназначена только для иллюстрации, и настоящее изобретение может применяться и на других летательных аппаратах.
Как показано на фиг.2, система 20 редуктора является трехступенчатой силовой зубчатой передачей с разделением потока крутящего момента, которая передает поток крутящего момента от множества высокооборотных двигателей Е на вал 24 несущего винта узла 12 несущего винта. Система 20 редуктора предпочтительно смонтирована в корпусе 21, который поддерживает зубчатую передачу, а также вал 24 несущего винта. Следует понимать, что для зубчатой передачи по настоящему изобретению могут использоваться различные корпусы и структуры.
Система 20 редуктора в первую очередь, но не только, предназначена для одновинтового летательного аппарата с тремя двигателями, что типично для винтокрылых летательных аппаратов большой грузоподъемности. Следует понимать, что с настоящим изобретением можно использовать любое количество двигателей. Система 20 редуктора легко допускает установку множества двигателей на корпус летательного аппарата, благодаря гибкой модульной конструкции и расположению зубчатых колес.
Как показано на фиг.3, система 20 редуктора, в основном, включает в себя множество модулей 26 разделения потока крутящего момента, каждый из которых имеет три ступени S1, S2 и S3. Каждая ступень включает в себя множество звеньев L1-Ln. Каждое звено представляет собой зубчатые колеса, которые делят поток крутящего момента от каждого двигателя Е (фиг.2). Каждое звено предпочтительно сконструировано на основе передаваемой части общей нагрузки на это звено. То есть, благодаря равенству разделения нагрузки, каждое звено не должно избыточно рассчитываться на повышенную нагрузку, как требовалось до сих пор для обеспечения передачи неравномерно разделенной нагрузки. В показанном варианте осуществления, только для примера, три ступени обеспечивают следующую редукцию: первая ступень - передаточное отношение RR1=1,968, входная/выходная частота - 6574/3341 об/мин; вторая ступень - передаточное отношение RR2=1,681, входная/выходная частота - 3341/1977 об/мин; третья ступень - передаточное отношение RR3=11,106, входная/выходная частота - 1977/178 об/мин.
Каждый двигатель Е передает поток крутящего момента на соответствующий модуль 26А, 26В, 26С разделения потока крутящего момента через соответствующий высокооборотный входной вал 28А, 28В, 28С. Количество модулей 26 разделения потока крутящего момента в системе 20 редуктора зависит от конфигурации летательного аппарата, количества двигателей и передаваемой мощности. Модули 26 разделения потока крутящего момента расположены вокруг периметра выходного зубчатого колеса 28 последней ступени, которое объединяет потоки мощности от каждого модуля и передает мощность через вал 24 несущего винта на узел 12 винта.
Поскольку модули 26А, 26В, 26С разделения потока крутящего момента, по существу, одинаковы, подробно будет описан только модуль 26А разделения потока крутящего момента, однако следует понимать, что это описание в равной мере относится к модулям 26А, 26В и 26С разделения потока крутящего момента. То есть, несмотря на то, что подробно будет описан только один модуль, разделяющий поток крутящего момента от двигателя Е, зубчатая передача от каждого двигателя, по существу, одинакова и, кроме того, следует понимать, что в настоящем изобретении может использоваться любое количество двигателей. В каждом модуле 26А, 26В, 26С разделения потока крутящего момента первая ступень S1 предпочтительно включает в себя спиральное коническое зубчатое зацепление; вторая ступень S2 предпочтительно включает в себя прямозубое цилиндрическое зубчатое зацепление; а третья ступень S3 предпочтительно включает в себя шевронное зубчатое зацепление.
Как показано на фиг.4, модуль 26А разделения потока крутящего момента приводится в движение высокооборотным входным валом 28А. Этот высокооборотный входной вал 28А вращается вокруг оси I вращения входного вала, и на нем установлено малое коническое зубчатое колесо 30, которое находится в коническом зацеплении 34 с плоским коническим зубчатым колесом 32. Плоское коническое зубчатое колесо 32 вращается вокруг своей оси F вращения, которая проходит, по существу, параллельно оси А вращения винта (фиг.3) и поперечно оси I вращения входного вала. Первое коническое зубчатое зацепление 34 образует первую ступень S1 для преобразования вращения входного вала вокруг оси I во вращение плоского зубчатого колеса вокруг оси F. Следует понимать, что настоящее изобретение будет полезно и для других расположений зубьев на зубчатых колесах, таких как предпочтительное расположение спирального конического зубчатого колеса.
Такое расположение высокооборотного входа преимущественно позволяет устанавливать двигатели в разных положениях по всем осям. То есть угол конического зацепления в конической зубчатой передаче придется менять только для изменения положения двигателя по вертикали или по оси Z относительно системы 20 редуктора (см. фиг.3). Коническое зубчатое зацепление 34 также может располагаться в любом положении по азимуту на плоском коническом зубчатом колесе 32, чтобы приспособить двигатель в любых монтажных положениях по осям Х и Y относительно системы 20 редуктора. Такая входная первая ступень легко позволяет создавать винтокрылый летательный аппарат с множеством двигателей, в котором двигатели могут располагаться в различных положениях на фюзеляже.
Плоское коническое зубчатое колесо 32 установлено на валу 36 первой ступени, который вращается вокруг оси F вращения. Вал 36 первой ступени поддерживает первое прямозубое цилиндрическое зубчатое колесо 38 и второе прямозубое цилиндрическое зубчатое колесо 40, разнесенные по длине вала. Вал 36 первой ступени предпочтительно расположен над выходным зубчатым колесом 28 последней ступени и, по меньшей мере, частично в пределах его периметра для обеспечения компактной компоновки. То есть ось F вращения расположена на радиусе, меньшем, чем радиус, определенный выходным зубчатым колесом 28 последней ступени относительно оси А вращения винта (фиг.5).
На второй ступени S2 установлены первый узел 40А полого вала, второй узел 40В полого вала, третий узел 40С полого вала и четвертый узел 40D полого вала, которые выполнены с возможностью вращения вокруг соответствующих осей Q1-Q4, проходящих рядом с периметром выходного зубчатого колеса 28 последней ступени. То есть оси Q1-Q4 установлены на общем радиусе С, который больше, чем радиус, определяемый выходным зубчатым колесом 28 последней ступени (фиг.5). Такое расположение позволяет установить каждый узел 40А-40D полого вала в одной общей плоскости Р (фиг.6), которая предусмотрена в корпусе 21 редуктора (фиг.2).
Предпочтительно, каждый из первого узла 40А и четвертого узла 40D полого вала включает в себя соответствующие вторые прямозубые цилиндрические зубчатые колеса 42А и 42D, которые находятся в зацеплении с первым прямозубым цилиндрическим зубчатым колесом 38, тогда как второй узел 40В полого вала и третий узел 40С полого вала включают в себя соответствующие прямозубые цилиндрические зубчатые колеса 44В, 44С второй ступени, которые находятся в зацеплении со вторым прямозубым цилиндрическим зубчатым колесом 40.
Зубчатые передачи между прямозубым цилиндрическим зубчатым колесом 42А, 42D второй ступени и первым прямозубым цилиндрическим зубчатым колесом 38, и между прямозубым цилиндрическим зубчатым колесом 44 В, 44С второй ступени и вторым прямозубым цилиндрическим зубчатым колесом 40 имеют эквивалентные передаточные отношения так, что узлы 40A-40D полых валов вращаются с эквивалентной частотой. Прямозубые цилиндрические зубчатые колеса 42А, 42D второй ступени предпочтительно имеют больший диаметр, чем прямозубые цилиндрические зубчатые колеса 44В, 44С второй ступени, поэтому прямозубые цилиндрические зубчатые колеса 44В, 44С второй ступени можно расположить под прямозубыми цилиндрическими зубчатыми колесами 42А, 42D второй ступени, что позволяет сделать конструкцию более компактной (фиг.5). То есть прямозубые цилиндрические зубчатые колеса 42А, 42D второй ступени определяют перекрывающее смещение относительно прямозубых цилиндрических зубчатых колес 44В, 44С второй ступени.
Каждый узел 40A-40D полого вала содержит полый вал 46A-46D, который является торсионно гибким и податливым в угловом направлении элементом, который обеспечивает необходимую синхронизацию зубчатых колес при сборке редуктора, в то же время поддерживая правильное распределение нагрузки при работе. Для получения эквивалентного разделения потока крутящего момента в пропорции 50/50 между всеми зубчатыми колесами полые валы 46А-46D имеют одинаковые торсионные свойства. Предпочтительно, полые валы 46А-46D идентичны (фиг.7) для облегчения сборки и обслуживания. Полые валы 46А-46D, как часть второй ступени редуцирования, обеспечивают равный баланс нагрузки между всеми зубчатыми колесами силовой передачи.
На третьей ступени S3 каждый узел 40А-40D полого вала включает в себя первое косозубое цилиндрическое зубчатое колесо 48аА-48aD и второе косозубое цилиндрическое зубчатое колесо 48bA-48bD, которые находятся в зацеплении с выходным зубчатом колесом 28 последней ступени, которое предпочтительно является шевронным зубчатым колесом. Каждый модуль, таким образом, передает поток мощности от одного высокооборотного входного вала 28А на восемь (8) зубчатых зацеплений с выходным зубчатым колесом 28 последней ступени для обеспечения существенной передачи потока крутящего момента, типично желательного для варианта винтокрылого летательного аппарата большой грузоподъемности, чтобы получить относительно плоскую систему 20 редуктора, которая имеет множество потоков нагрузки и в которой отказ одного модуля не приводит к отказу всей системы.
Как показано на фиг.8, другая система 20' редуктора содержит альтернативный узел 50 корпуса. Поскольку в настоящем изобретении зубчатые колеса предпочтительно расположены на относительно большом диаметре вокруг главного выходного зубчатого колеса (фиг.5), узел 50 корпуса редуктора может быть адаптирован для использования при различных ограничениях по габаритам. Только для примера система 20 редуктора может включать в себя три независимых корпуса 52А, 52В, 52С моделей зубчатых передач, установленных на общем корпусе 54, который определяет плоскость Р, в которой установлены узлы полых валов каждого модуля (фиг.6). Нагрузки от узла 12 несущего винта, которые передаются через вал 24 несущего винта, подаются на отдельный узел 56 опорной рамы вала винта. Разделение опор минимизирует передачу деформаций под внешними нагрузками на узел 12 несущего винта, на зубчатую передачу. Таким образом, предусмотрен более легкий узел корпуса, который минимизирует смещение зубчатых колес и увеличивает срок службы системы.
Следует понимать, что термины относительного позиционирования, такие как "передний", "задний", "верхний", "нижний", "выше", "ниже" и т.п., относятся к нормальному эксплуатационному пространственному положению транспортного средства и не должны считаться ограничивающими.
Следует понимать, что хотя в показанном варианте осуществления было раскрыто конкретное расположение компонентов, настоящее изобретение распространяется и на другие варианты расположения.
Хотя в описании были показаны, описаны и заявлены конкретные последовательности шагов, следует понимать, что согласно настоящему изобретению такие шаги могут выполняться в любом порядке, отдельно или совместно, если не указано иное.
Вышеприведенное описание является иллюстративным, а не ограничивающим. В свете вышеописанных идей возможны различные модификации и варианты настоящего изобретения. Выше были описаны предпочтительные варианты настоящего изобретения, однако специалисты признают, что определенные модификации входят в объем настоящего изобретения. Таким образом, следует понимать, что в рамках приложенной формулы настоящее изобретение может быть реализовано способами, отличными от конкретно описанных выше. Поэтому истинный объем и содержание настоящего изобретения определен приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОТОЧНЫЙ ГЛАВНЫЙ РЕДУКТОР ВЕРТОЛЕТА (ВАРИАНТЫ) | 2017 |
|
RU2662382C1 |
| РЕДУКТОР С РАЗДЕЛЕНИЕМ КРУТЯЩЕГО МОМЕНТА ДЛЯ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С СИСТЕМОЙ ПОСТУПАТЕЛЬНОЙ ТЯГИ | 2006 |
|
RU2359875C1 |
| Двухступенчатый редуктор верхнего силового привода буровой установки | 2016 |
|
RU2646289C1 |
| Многоступенчатый редуктор верхнего силового привода буровой установки | 2016 |
|
RU2646288C1 |
| РЕДУКТОР ВЕРТОЛЕТА | 2020 |
|
RU2749965C1 |
| ЦИЛИНДРИЧЕСКАЯ ЗУБЧАТАЯ ПЕРЕДАЧА ВНЕШНЕГО ЗАЦЕПЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2114352C1 |
| Многопоточный двухступенчатый редуктор опорно-трансмиссионного узла ветроэнергетической установки | 1989 |
|
SU1796044A3 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| Главный редуктор вертолета | 2016 |
|
RU2613099C1 |
| УЗЕЛ ПРИВОДА ДЛЯ КОЛЕС ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2559191C1 |



Изобретение относится к многопоточному редуктору, в частности к редуктору с разделением потока крутящего момента на множество потоков для летательного аппарата, предпочтительно в варианте одновинтового винтокрылого летательного аппарата большой грузоподъемности. Система редуктора предусматривает множество трехступенчатых модулей (26А, 26В, 26С) силовой зубчатой передачи с разделением потока крутящего момента, каждый из которых передает крутящий момент от высокооборотного двигателя на вал (24) несущего винта. Расположение конического плоского зубчатого колеса первой ступени (S1) предусматривает компактную компоновку, позволяющую устанавливать двигатель в разных положениях по всем осям. На второй ступени (S2) узлы полых валов обеспечивают одинаковый баланс нагрузки. На третьей ступени (S3) каждый узел полого вала включает в себя множество малых зубчатых колес, находящихся в зацеплении с выходным зубчатым колесом (28) последней ступени. Изобретение позволяет уменьшить массу и габариты, равное разделение нагрузок и является относительно несложным и недорогим в производстве. 7 з.п. ф-лы, 8 ил.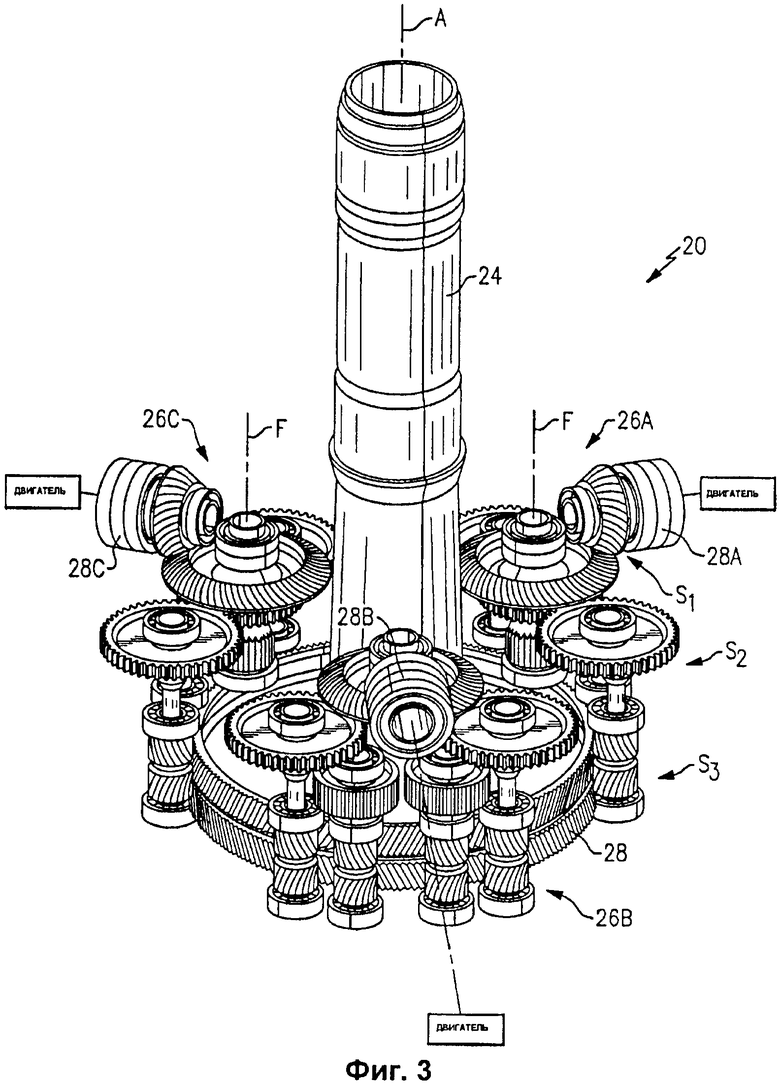
1. Система редуктора, содержащая выходное зубчатое колесо последней ступени, которое определяет ось вращения несущего винта;
коническое плоское зубчатое колесо, установленное на валу первой ступени для вращения вокруг оси вращения конического зубчатого колеса, при этом упомянутая ось вращения конического зубчатого колеса проходит параллельно упомянутой оси вращения несущего винта и расположена на радиальном расстоянии от оси вращения несущего винта меньшем, чем радиус, определенный упомянутым выходным зубатым колесом последней ступени; первое прямозубое цилиндрическое зубчатое колесо, установленное на упомянутом валу первой ступени; второе прямозубое цилиндрическое зубчатое колесо, установленное на упомянутом валу первой ступени; первый узел полого вала, имеющий цилиндрическое зубчатое колесо второй ступени, находящееся в зацеплении с упомянутым первым прямозубым цилиндрическим зубчатым колесом, при этом упомянутый первый узел полого вала установлен для вращения вокруг первой оси вращения полого вала; второй узел полого вала, имеющий цилиндрическое зубчатое колесо второй ступени, находящееся в зацеплении с упомянутым вторым прямозубым цилиндрическим зубчатым колесом, при этом упомянутый второй узел полого вала установлен для вращения вокруг второй оси вращения полого вала; третий узел полого вала, имеющий цилиндрическое зубчатое колесо второй ступени, находящееся в зацеплении с упомянутым вторым прямозубым цилиндрическим зубчатым колесом, при этом упомянутый третий узел полого вала установлен для вращения вокруг третьей оси вращения полого вала; и четвертый узел полого вала, имеющий цилиндрическое зубчатое колесо второй ступени, находящееся в зацеплении с упомянутым первым прямозубым цилиндрическим зубчатым колесом, при этом упомянутый четвертый узел полого вала установлен для вращения вокруг четвертой оси вращения полого вала, при этом упомянутая первая, вторая, третья и четвертая оси вращения полого вала расположены на общем радиусе большем, чем радиус, определенный упомянутым выходным зубчатым колесом последней ступени.
2. Система редуктора по п.1, в которой каждый из упомянутого первого, второго, третьего и четвертого узлов полого вала включает в себя полый вал с эквивалентными торсионными свойствами.
3. Система редуктора по п.1, в которой каждый из упомянутого первого, второго, третьего и четвертого узлов полого вала установлены в общей плоскости корпуса, определенной под упомянутым выходным зубчатым колесом последней ступени напротив вала несущего винта.
4. Система редуктора по п.1, в которой упомянутое выходное зубчатое колесо последней ступени поддерживает вал несущего винта узла несущего винта.
5. Система редуктора по п.1, в которой упомянутое выходное зубчатое колесо последней ступени приводит в движение узел несущего винта винтокрылого летательного аппарата.
6. Система редуктора по п.1, далее содержащая первое косозубое цилиндрическое зубчатое колесо и второе косозубое цилиндрическое зубчатое колесо, установленные на упомянутом первом узле полого вала для вращения вместе с ним; первое косозубое цилиндрическое зубчатое колесо и второе косозубое цилиндрическое зубчатое колесо, установленные на упомянутом втором узле полого вала для вращения вместе с ним; первое косозубое цилиндрическое зубчатое колесо и второе косозубое цилиндрическое зубчатое колесо, установленные на упомянутом третьем узле полого вала для вращения вместе с ним; первое косозубое цилиндрическое зубчатое колесо и второе косозубое цилиндрическое зубчатое колесо, установленные на упомянутом четвертом узле полого вала для вращения вместе с ним.
7. Система редуктора по п.6, в которой упомянутое выходное зубчатое колесо последней ступени находится в зацеплении с упомянутым первым косозубым цилиндрическим зубчатым колесом и упомянутым вторым косозубым цилиндрическим зубчатым колесом, установленными на упомянутом первом узле полого вала, с упомянутым первым косозубым цилиндрическим зубчатым колесом и упомянутым вторым косозубым цилиндрическим зубчатым колесом, установленными на упомянутом втором узле полого вала, с упомянутым первым косозубым цилиндрическим зубчатым колесом и упомянутым вторым косозубым цилиндрическим зубчатым колесом, установленными на упомянутом третьем узле полого вала, и с упомянутым первым косозубым цилиндрическим зубчатым колесом и упомянутым вторым косозубым цилиндрическим зубчатым колесом, установленными на упомянутом четвертом узле полого вала.
8. Система редуктора по п.7, в которой упомянутое выходное зубчатое колесо последней ступени является шевронным зубчатым колесом.
| US 5813292 А, 29.09.1998 | |||
| US 4479619 А, 30.10.1984 | |||
| US 4489625 А, 25.12.1984 | |||
| КОДЕР, ДЕКОДЕР И СООТВЕТСТВУЮЩИЕ СПОСОБЫ С ИСПОЛЬЗОВАНИЕМ АДАПТИВНОГО КОНТУРНОГО ФИЛЬТРА | 2020 |
|
RU2823558C2 |
| РЕДУКТОР ПРИВОДА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1997 |
|
RU2146636C1 |

