Настоящее изобретение относится к редуктору с разделением крутящего момента и, более конкретно, к основному редуктору для винтокрылого летательного аппарата, который направляет значительную мощность на толкающий воздушный винт, установленный в хвостовой части.
Редуктор винтокрылого летательного аппарата передает мощность от газотурбинного двигателя к несущему винту. Обычное устройство может направлять мощность от нескольких газотурбинных двигателей на одиночный несущий винт, который может содержать множество лопастей. Поскольку скорость вращения несущего винта значительно ниже скорости вращения газотурбинных двигателей, то скорость вращения газотурбинного двигателя должна быть уменьшена при помощи редуктора. При уменьшении выходных оборотов газотурбинного двигателя крутящий момент увеличивается через ряд промежуточных ступеней редуктора и валов, прежде чем будет обеспечена конечная выходная мощность привода в несущем винте.
Обычный винтокрылый летательный аппарат имеет горизонтальную скорость перемещения, ограниченную рядом факторов. Среди них - тенденция отступающей лопасти несущего винта вызывать срыв воздушного потока при высоких горизонтальных скоростях перемещения. При увеличении горизонтальной скорости перемещения скорость воздушного потока на отступающей лопасти несущего винта снижается таким образом, что лопасть может войти в состояние срыва. Напротив, скорость воздушного потока на наступающей лопасти несущего винта увеличивается при увеличении горизонтальной скорости перемещения.
Недавно был разработан высокоскоростной комбинированный летательный аппарат, в котором вспомогательная система поступательного движения создает поступательную тягу, в то время как система основного несущего винта работает в условиях обратного воздушного потока в ходе режима скоростного полета. Хотя такие концепции оказались эффективными, основные планетарные редукторы для такого летательного аппарата являются довольно сложными и, следовательно, привели к редукторам, которые могут быть относительно тяжелыми и занимать значительный объем. Поскольку система несущего винта размещает редуктор в центральной части планера летательного аппарата, то такой тяжелый и массивный редуктор часто проходит в часть кабины летательного аппарата, что может уменьшить полезную нагрузку летательного аппарата и пространство кабины, приводя к нерациональному использованию объема.
Следовательно, необходимо создать легкий, низкопрофильный редуктор для высокоскоростного комбинированного винтокрылого летательного аппарата, который легко можно устанавливать в летательном аппарате над кабиной летательного аппарата для увеличения полезной нагрузки и пространства кабины.
Краткое описание изобретения
Редуктор для высокоскоростного комбинированного винтокрылого летательного аппарата в соответствии с настоящим изобретением приводит в движение систему сдвоенного соосного несущего винта противовращения и систему поступательной тяги для обеспечения значительной поступательной тяги, обычно параллельной продольной оси летательного аппарата.
Предпочтительно, редуктор содержит основной модуль, входной модуль и модуль поступательной тяги. Входной модуль получает мощность от одного или нескольких двигателей для приведения в движение валов противовращения несущего винта и модуля поступательной тяги, который в свою очередь приводит в движение систему поступательной тяги.
Предпочтительно, входной модуль распределят мощность на основной модуль и модуль поступательной тяги. Редуктор представляет собой решение меньшего веса, поскольку каждый модуль предназначен для передачи только необходимой части доступной мощности двигателя.
Предпочтительно, основной модуль содержит вал первого несущего винта и вал второго несущего винта, приводимые в движение первой и второй прямозубыми шестернями для соосного противовращения несущего винта вокруг оси вращения несущего винта. Сопряжение первой и второй прямозубых шестерен/основного редуктора при внутреннем/наружном зацеплении шестерен является таким, что общий вал прямозубых шестерен, по сути, ограничен в движении для минимизации его колебаний при обеспечении множества линий зубчатой передачи с симметрично расположенными вторичными шестернями противовращения. Такая конфигурация уменьшает количество и размер шестерен и соответствующих подшипников, что уменьшает вес устройства при облегчении монтажа в низкопрофильном корпусе, который выполнен с конфигурацией для прикрепления к планеру летательного аппарата над кабиной летательного аппарата.
Модуль поступательной тяги содержит основную поступательную шестерню, которая, предпочтительно, загружена, по меньшей мере, с двух сторон двигателем #1 и двигателем #2. Таким образом, основная поступательная шестерня ограничена до некоторой степени в перемещении, что минимизирует колебания и уменьшает размер подшипника, таким образом дополнительно уменьшая вес устройства. Вал трансмиссии от основной поступательной шестерни приводит в движение прямозубую шестерню, расположенную в качестве солнечной шестерни между множеством сателлитных паразитных шестерен. Прямозубая шестерня с обращенными вверх зубьями шестерни вращается вокруг множества сателлитных паразитных шестерен для приведения в движение системы поступательной тяги. Модуль поступательной тяги таким образом приводит в движение систему поступательной тяги с компактным редуктором уменьшенной площади поперечного сечения.
Следовательно, настоящее изобретение описывает облегченный низкопрофильный редуктор для высокоскоростного комбинированного винтокрылого летательного аппарата, который легко можно устанавливать в летательном аппарате над кабиной летательного аппарата для увеличения полезной нагрузки и пространства кабины.
Краткое описание чертежей
Различные признаки и преимущества настоящего изобретения очевидны для специалистов в данной области техники из нижеследующего подробного описания предпочтительного варианта осуществления. Чертежи, которые прилагаются к подробному описанию, могут быть кратко описаны следующим образом:
Фиг.1A-1Б - общая схема примера осуществления винтокрылого летательного аппарата для использования с системой редуктора с разделением крутящего момента по настоящему изобретению;
Фиг.2 - вид редуктора с разделением крутящего момента в соответствии с настоящим изобретением;
Фиг.3 - схематический вид сверху редуктора с разделением крутящего момента в соответствии с настоящим изобретением;
Фиг.4 - перспективный вид сзади с наклоном редуктора с разделением крутящего момента в соответствии с настоящим изобретением;
Фиг.5 - схематический вид сзади редуктора с разделением крутящего момента в соответствии с настоящим изобретением;
Фиг.6 - перспективный вид спереди с наклоном зубчатой передачи редуктора с разделением крутящего момента в соответствии с настоящим изобретением; и
Фиг.7 - вид сбоку зубчатой передачи редуктора с разделением крутящего момента в соответствии с настоящим изобретением.
Подробное описание предпочтительного варианта осуществления
На Фиг.1A-1Б представлен высокоскоростной комбинированный винтокрылый летательный аппарат 10 вертикального взлета и посадки (VTOL), имеющий систему 12 сдвоенных соосных винтов противовращения. Летательный аппарат 10 содержит планер 14 летательного аппарата, который поддерживает систему 12 сдвоенных соосных несущих винтов противовращения, а также систему 30 поступательной тяги для обеспечения поступательной тяги, по существу, параллельно продольной оси L летательного аппарата. Необходимо понимать, что настоящее изобретение будет эффективно применяться к другим конфигурациям летательного аппарата.
Система 12 несущих винтов содержит систему 16 первого несущего винта и систему 18 второго несущего винта. Каждая из систем 16, 18 несущего винта содержит множество лопастей 20 винта, установленных на втулке 22, 24 несущего винта. Система 12 несущего винта приводится в действие с помощью основного редуктора 26, который, предпочтительно, расположен над кабиной 28 летательного аппарата.
Система 30 поступательной тяги, предпочтительно, содержит толкающий воздушный винт 32, имеющий ось P вращения воздушного винта, ориентированную, по существу, горизонтально и параллельно продольной оси L летательного аппарата для создания тяги для высокоскоростного полета. Предпочтительно, толкающий воздушный винт 32 установлен в аэродинамическом обтекателе 34, прикрепленном к задней части планера 14 летательного аппарата. Система 30 поступательной тяги приводится в движение с помощью того же основного редуктора 26, который приводит в движение систему 12 несущего винта.
Основной редуктор 26 приводится в движение одним или несколькими двигателями (изображено два). В случае винтокрылого летательного аппарата редуктор 26, предпочтительно, расположен между одним или несколькими газотурбинными двигателями (схематически проиллюстрированными как E), системой 12 несущего винта и системой 30 поступательной тяги. Основным редуктором 26, предпочтительно, является редуктор с разделением крутящего момента, который передает крутящий момент от двигателей E через множество ветвей кинематической цепи. Множество ветвей обеспечивает создание редуктора, который имеет значительно меньший вес по сравнению с обычными планетарными редукторами при обеспечении резервных линий передачи, если одна линия станет нерабочей. Кроме того, редуктор 26 обеспечивает относительно низкопрофильную конструкцию, так что монтаж над кабиной 28 летательного аппарата будет легко осуществляться. Как изображено, двигатели E, предпочтительно, расположены сзади редуктора 26 для обеспечения эффективной конструктивной компоновки, которая увеличивает объем для экипажа и груза посредством минимизации проникновения редуктора 26 в кабину 28 летательного аппарата, как обычно происходит при обычной компоновке планетарной передачи.
Как показано на Фиг.2, редуктор 26 обычно содержит основной модуль 36, входной модуль 38 и модуль 40 поступательной тяги. Входной модуль 38, предпочтительно, содержится во входном корпусе 42, установленном непосредственно на основном корпусе 44 основного модуля 36. Модуль 40 поступательной тяги расположен на расстоянии от входного корпуса 42, но соединен с ним через вал 46 трансмиссии.
Вал 48 первого несущего винта и вал 50 второго несущего винта системы 12 несущего винта выступают из основного модуля 36. Втулка 22 первого несущего винта установлена на валу 48 первого несущего винта, в то время как втулка 24 второго несущего винта установлена на валу 50 второго несущего винта для соосного противовращения вокруг оси R вращения несущего винта. Во время эксплуатации входной модуль 38 получает мощность от двигателей E для приведения в движение основного модуля 36 и модуля 40 поступательной тяги. Модуль 40 поступательной тяги приводит в движение систему 30 поступательной тяги.
Как показано на Фиг.3, редуктор 26 получает тягу двигателя через высокоскоростной входной вал 52, приводимый в движение двигателем E. Хотя только зубчатая передача от двигателя #1 будет описана подробно, зубчатая передача от двигателя #2 является идентичной и следует понимать, что любое количество двигателей E может быть использовано в настоящем изобретении. Предпочтительно, каждый двигатель E приводит в движение входной модуль 38 и мощность распределяется от него на несущий винт и систему поступательной тяги. Данная конструкция обеспечивает уменьшение веса, поскольку каждый модуль передает только необходимую часть имеющейся мощности двигателя.
Предпочтительно, высокоскоростной входной вал 52 содержит косозубую шестерню N1 54, которая приводит в движение соответствующую косозубую шестерню N2 56. Необходимо понимать, что, хотя описываются конкретные типы шестерен в проиллюстрированном варианте осуществления и хотя указана предпочтительная форма, формы шестерен иные, чем конкретно указанные формы шестерен могут также быть использованы в настоящем изобретении. Косозубая шестерня N2 56 расположена во входном модуле 38 для приведения в движение входного вала 58, который вращается вокруг оси вращения 59 входного вала, расположенной обычно поперечно оси R вращения несущего винта (также представлено на Фиг.4).
Предпочтительно, косозубая шестерня N1 54 и косозубая шестерня N2 56 образуют комплект косозубых шестерен с передаточным отношением RR1=2,43. Очевидным является, что передаточное отношение связано с мощностью двигателя, оборотами несущего винта и другими параметрами, так что передаточные отношения могут быть желательны при других эксплуатационных требованиях. В проиллюстрированном варианте осуществления мощность двигателя приблизительно составляет 1000 л.с. на двигатель.
Косозубая шестерня N2 56 обеспечивает сопряжение входного модуля 38, основного модуля 36 и модуля 40 поступательной тяги. То есть мощность потребляется от одиночного источника (входного модуля) и затем распределяется на все остальные модули, так что основной модуль и модуль поступательной тяги принимают только необходимое количество мощности исходя из эксплуатационных требований, как будет описано ниже более подробно.
От косозубой шестерни N2 56 входной вал 58 приводит в движение коническую шестерню N3 60 со спиральными зубьями, установленную на нем и расположенную в основном модуле 36. Коническая шестерня N3 60 со спиральными зубьями приводит в движение коническую шестерню N4 62 со спиральными зубьями вокруг оси 64 вращения, обычно параллельной оси R вращения несущего винта (также представлено на Фиг.4 и 5). Коническая шестерня N3 60 со спиральными зубьями, предпочтительно, зацепляется с конической шестерней N4 62 со спиральными зубьями для получения передаточного отношения RR2=3. Коническая шестерня N3 60 со спиральными зубьями зацепляется с конической шестерней N4 62 со спиральными зубьями при поверхностной схеме зацепления, которая передает крутящий момент от оси 59 вращения входного вала на ось 64 вращения, которая, обычно, поперечна ей. Коническая шестерня N4 62 со спиральными зубьями приводит в движение косозубую шестерню N5 66 и косозубую шестерню N6 68 вокруг оси 64 вращения. Косозубая шестерня N5 66 и косозубая шестерня N6 68, предпочтительно, соединены с общим валом 70 косозубых шестерен таким образом, что коническая шестерня N4 62 со спиральными зубьями, косозубая шестерня N5 66 и косозубая шестерня N6 68 вращаются как звено вокруг оси 64 вращения, которая параллельна оси R вращения несущего винта.
Косозубая шестерня N5 66 приводится в зацепление с основной косозубой шестерней N7 72, которая приводит в движение вал 50 второго несущего винта вокруг оси R вращения. Косозубая шестерня N6 68 приводится в зацепление с основной косозубой шестерней N8 74, которая приводит в движение вал 48 первого несущего винта вокруг оси R вращения. То есть вал 48 первого несущего винта соединен с основной косозубой шестерней N8 74, а вал 50 второго несущего винта соединен с основной косозубой шестерней N7 72. Предпочтительно, косозубая шестерня N5 66 приводится в зацепление с основной косозубой шестерней N7 72 по наружной периферии основной косозубой шестерни N7 72, в то время как косозубая шестерня N6 68 приводится в зацепление с основной косозубой шестерней N8 74 по внутренней периферии основной косозубой шестерни N8 74 для обеспечения обратного вращения между ними. То есть зубья шестерни основной косозубой шестерни N7 72 выступают наружу относительно оси R вращения несущего винта, а зубья шестерни основной косозубой шестерни N8 74 выступают внутрь по направлению к оси R вращения несущего винта.
Косозубая шестерня N5 66/основная косозубая шестерня N7 72 и косозубая шестерня N6 68/основная косозубая шестерня N8 74 сопряжены при внутреннем/внешнем зацеплении шестерен таким образом, что общий вал 70 косозубых шестерен, по сути, ограничен в движении, что минимизирует колебания. Потребности в количестве и размерах подшипников, таким образом, уменьшены, что дополнительно уменьшает вес устройства. Сопряжение косозубой шестерни N5 66/основной косозубой шестерни N7 72 и косозубой шестерни N6 68/основной косозубой шестерни N8 74, предпочтительно, дает передаточное отношение RR3=9. Диаметр начальной окружности и/или передаточное отношение между косозубой шестерней N5 66 и основной косозубой шестерней N7 72, а также между косозубой шестерней N6 68 и основной косозубой шестерней N8 74 определяются для компенсации разных диаметров основных косозубых шестерен с целью обеспечения вращения валов 48, 50 несущего винта с постоянной скоростью.
Таким образом, основной модуль 36 обеспечивает низкопрофильный редуктор с множеством линий зубчатой передачи, использующий минимальное количество симметрично нагруженных вторичных шестерен, которые противоположно вращаются и могут быть помещены в низкопрофильный корпус, выполненный для легкого закрепления над кабиной летательного аппарата для передачи полетных нагрузок на планер летательного аппарата.
Что касается модуля 40 поступательной тяги, то косозубая шестерня N2 56 приводит в движение косозубую шестерню N9 76, которая, по существу, является паразитной шестерней между косозубой шестерней N2 56 и основной поступательной косозубой шестерней N10 80. Косозубая шестерня N9 76 приводит в движение основную поступательную косозубую шестерню N10 80 вокруг оси 78 вращения вала трансмиссии. Поступательная косозубая шестерня N10 80 соединена с валом 46 трансмиссии через эластичную муфту 82a (показана схематически). Ось 78 вращения обычно проходит параллельно оси 59 вращения входного вала и оси D вращения вала трансмиссии. Косозубая шестерня N9 76 приводит в движение основную поступательную косозубую шестерню N10 80 при сопряжении, которое, предпочтительно, дает передаточное отношение RR4=1,6. Так как основная поступательная косозубая шестерня N10 80 нагружена, по меньшей мере, с двух сторон благодаря двигателям #1 и двигателям #2, то основная поступательная косозубая шестерня N10 80 ограничена в движении таким образом, который минимизирует колебания и уменьшает размер подшипника, таким образом уменьшая вес устройства.
Вал 46 трансмиссии приводит в движение прямозубую шестерню №11 84 через эластичную муфту 82b (показана схематически). Гибкие муфты 82a, 82b сглаживают изгибания корпуса летательного аппарата и отклонение между системой 30 поступательной тяги и редуктором 26. Прямозубой шестерней №11 84, предпочтительно, является солнечная шестерня, расположенная между множеством сателлитных паразитных шестерен №12 86 (показано три), которые закреплены пространственно для уменьшения поперечного сечения редуктора (также показано на Фиг.2). Прямозубая шестерня №13 88 с обращенными внутрь зубьями шестерни вращается вокруг множества сателлитных паразитных шестерен №12 86 для приведения в движение системы 30 поступательной тяги вокруг оси P вращения поступательной тяги (также показано на Фиг.2). Прямозубая шестерня №13 88 и множество сателлитных паразитных шестерен №12 86, предпочтительно, соединены для получения передаточного отношения RR5=2,5. Очевидным является, что, хотя оси 78 и P обычно совпадают и параллельны продольной оси L летательного аппарата, другие схемы, а также эластичные муфты могут размещать оси несоосно, кроме того, обеспечивать непосредственную передачу на толкающий воздушный винт 32 (Фиг.1).
Необходимо понимать, что термины, относящиеся к положению, такие как «передний», «задний», «нижний», «выше», «ниже» и им подобное используются относительно нормальной рабочей высоты аппарата и не должны рассматриваться как ограничивающие.
Очевидным является, что, хотя в проиллюстрированном варианте осуществления раскрыто конкретное расположение элементов, настоящее изобретение будет эффективно применяться для других расположений.
Хотя изображены, описаны и заявлены конкретные поэтапные последовательности, необходимо понимать, что этапы могут осуществляться в любом порядке, отдельном или комбинированном, если не указано иное, и настоящее изобретение будет эффективно применяться для них.
Указанное описание является иллюстративным, а не определяется внутренними ограничениями. Многие модификации и изменения настоящего изобретения возможны без изменения сущности настоящего изобретения. Были раскрыты предпочтительные варианты осуществления настоящего изобретения, однако для специалиста в данной области техники очевидным является, что конкретные модификации охватываются объемом настоящего изобретения. Следовательно, очевидным является, что объем прилагаемой формулы настоящего изобретения охватывает и иные практические осуществления по сравнению с конкретно изложенными.
Изобретения относятся к вариантам выполнения редуктора с разделением крутящего момента, преимущественно для винтокрылого летательного аппарата. Система редуктора по первому варианту содержит входной модуль, основной модуль и модуль поступательной тяги. Основной модуль находится в зацеплении с входным модулем и содержит две основные шестерни для соосного противовращения вокруг оси вращения несущего винта. Модуль поступательной тяги находится в зацеплении с входным модулем и содержит основную поступательную шестерню, которая вращается вокруг оси вращения вала трансмиссии, обычно поперечной оси вращения несущего винта. В системе редуктора по второму варианту входной модуль имеет первую прямозубую шестерню, введенную в зацепление со второй прямозубой шестерней. Вторая прямозубая шестерня введена в зацепление с третьей прямозубой шестерней. Основной модуль находится в зацеплении с входным модулем. Основные шестерни основного модуля приводятся в движение второй прямозубой шестерней. Модуль поступательной тяги через поступательную шестерню введен в зацепление с третьей прямозубой шестерней входного модуля. В системе редуктора по третьему варианту основной модуль находится в зацеплении с входным модулем через входной вал, который выполнен с возможностью вращения вокруг оси вращения входного вала. Модуль поступательной тяги введен в зацепление с входным модулем аналогично другим вариантам. Достигается уменьшение веса и объема редуктора, а также увеличиваются полезная нагрузка и пространство в кабине. 3 н. и 17 з.п. ф-лы, 8 ил.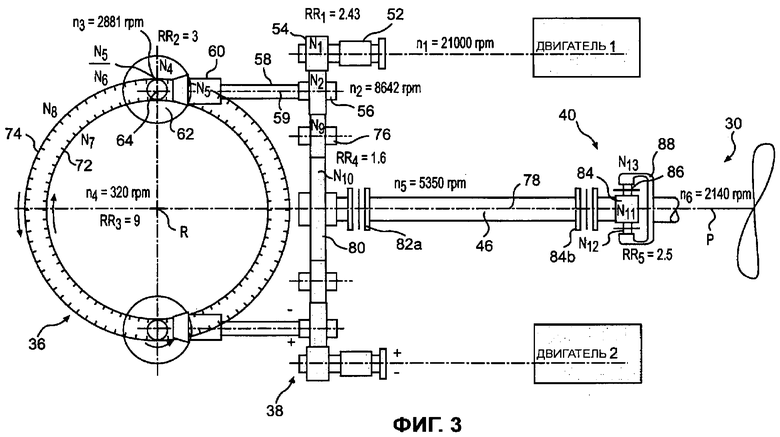
1. Система редуктора с разделением крутящего момента, содержащая входной модуль; основной модуль в зацеплении с указанным входным модулем, причем указанный основной модуль содержит первую основную шестерню, вторую основную шестерню для соосного противовращения вокруг оси вращения несущего винта; и модуль поступательной тяги в зацеплении с указанным входным модулем, причем указанный модуль поступательной тяги содержит основную поступательную шестерню, которая вращается вокруг оси вращения вала трансмиссии, обычно, поперечной указанной оси вращения несущего винта.
2. Система редуктора с разделением крутящего момента по п.1, в которой указанная первая основная шестерня соединена с валом первого несущего винта, и указанная вторая основная шестерня вращает вал второго несущего винта.
3. Система редуктора с разделением крутящего момента по п.2, в которой указанный вал первого несущего винта установлен, по меньшей мере, частично в указанном валу второго несущего винта.
4. Система редуктора с разделением крутящего момента по п.1, дополнительно содержащая первую прямозубую шестерню и вторую прямозубую шестерню, соединенные с общим валом прямозубых шестерен, причем указанная первая прямозубая шестерня зацеплена с указанной первой основной шестерней вдоль ее наружной периферии, относящейся к указанной оси вращения несущего винта, и указанная вторая прямозубая шестерня зацеплена с указанной второй основной шестерней по ее внутренней периферии относительно указанной оси вращения несущего винта для обеспечения вращения в противоположном направлении между указанной первой основной шестерней и указанной второй основной шестерней.
5. Система редуктора с разделением крутящего момента по п.4, в которой указанный общий вал прямозубых шестерен вращается вокруг оси вращения, являющейся элементом, обычно параллельным указанной оси вращения несущего винта.
6. Система редуктора с разделением крутящего момента по п.5, дополнительно содержащая коническую шестерню со спиральными зубьями, соединенную с указанным общим валом прямозубых шестерен, причем указанная коническая шестерня со спиральными зубьями приводится в движение входным валом, который проходит от указанного входного модуля.
7. Система редуктора с разделением крутящего момента по п.6, в которой указанный входной вал вращается вокруг входной оси вращения, обычно поперечной указанной оси вращения несущего винта.
8. Система редуктора с разделением крутящего момента по п.6, дополнительно содержащая шестерню, которая приводит в движение указанный входной вал, причем указанная шестерня находится в зацеплении с указанной основной поступательной шестерней через промежуточную шестерню.
9. Система редуктора с разделением крутящего момента по п.1, в которой указанная основная поступательная шестерня приводит в движение вал трансмиссии, который приводит в движение солнечную шестерню в зацеплении с множеством сателлитных паразитных шестерен.
10. Система редуктора с разделением крутящего момента по п.9, дополнительно содержащая прямозубую шестерню с обращенными внутрь зубьями шестерни, которая вращается вокруг указанного множества сателлитных паразитных шестерен.
11. Система редуктора с разделением крутящего момента по п.10, в которой указанная прямозубая шестерня с обращенными внутрь зубьями шестерни приводит в движение систему поступательного движения вокруг оси системы поступательного движения.
12. Система редуктора с разделением крутящего момента по п.11, в которой указанная система поступательного движения содержит толкающий воздушный винт.
13. Система редуктора с разделением крутящего момента по п.11, в которой указанная система поступательного движения содержит вентилятор в кольцевом обтекателе.
14. Система редуктора с разделением крутящего момента для высокоскоростного комбинированного винтокрылого летательного аппарата, содержащая входной модуль, имеющий первую прямозубую шестерню, введенную в зацепление со второй прямозубой шестерней, причем указанная вторая прямозубая шестерня введена в зацепление с третьей прямозубой шестерней, причем указанная первая прямозубая шестерня установлена с возможностью вращения вокруг первой оси вращения, причем вторая прямозубая шестерня установлена вокруг второй оси вращения, и причем указанная третья прямозубая шестерня установлена вокруг третьей оси вращения, причем указанные первая, вторая и третья оси вращения обычно поперечны оси вращения несущего винта; основной модуль в зацеплении с указанным входным модулем, причем указанный основной модуль содержит первую основную шестерню и вторую основную шестерню для соосного противовращения вокруг указанной оси вращения несущего винта, причем указанная первая основная шестерня и указанная вторая основная шестерня приводятся в движение указанной второй прямозубой шестерней; и модуль поступательной тяги, введенный в зацепление с указанным входным модулем, причем указанный модуль поступательной тяги содержит основную поступательную шестерню, которая вращается вокруг оси вращения вала трансмиссии, обычно поперечной указанной оси вращения несущего винта, причем указанная основная поступательная шестерня введена в зацепление с указанной третьей прямозубой шестерней.
15. Система редуктора с разделением крутящего момента по п.14, в которой указанная первая основная шестерня соединена с валом первого несущего винта, и указанная вторая основная шестерня вращает вал второго несущего винта.
16. Система редуктора с разделением крутящего момента по п.14, дополнительно содержащая двигатель, который приводит в движение указанную первую прямозубую шестерню.
17. Система редуктора с разделением крутящего момента по п.14, дополнительно содержащая первую прямозубую шестерню основного модуля и вторую прямозубую шестерню основного модуля, соединенные с общим валом прямозубых шестерен, причем указанная первая прямозубая шестерня основного модуля введена в зацепление с указанной первой основной шестерней вдоль ее наружной периферии, относящейся к указанной оси вращения несущего винта, и указанная вторая прямозубая шестерня основного модуля введена в зацепление с указанной второй основной шестерней по ее внутренней периферии относительно указанной оси вращения несущего винта для обеспечения вращения в противоположном направлении между указанной первой основной шестерней и указанной второй основной шестерней.
18. Система редуктора с разделением крутящего момента по п.17, в которой указанный общий вал прямозубых шестерен вращается вокруг оси вращения, являющейся элементом, обычно параллельным указанной оси вращения несущего винта.
19. Система редуктора с разделением крутящего момента по п.18, дополнительно содержащая коническую шестерню со спиральными зубьями, соединенную с указанным общим валом прямозубых шестерен, причем указанная коническая шестерня со спиральными зубьями приводится в движение входным валом, который проходит от указанного входного модуля, причем входной вал приводится в движение указанной второй прямозубой шестерней.
20. Система редуктора с разделением крутящего момента, содержащая
входной модуль; основной модуль, находящийся в зацеплении с указанным входным модулем через входной вал, причем указанный основной модуль содержит первую основную шестерню и вторую основную шестерню для соосного противовращения вокруг оси вращения несущего винта, причем указанный входной вал выполнен с возможностью вращения вокруг оси вращения входного вала, обычно, поперечной указанной оси вращения несущего винта; первую шестерню основного модуля и вторую шестерню основного модуля, соединенные с общим валом прямозубых шестерен, который вращается вокруг оси вращения вала, обычно параллельной указанной оси вращения несущего винта, причем указанная первая шестерня основного модуля введена в зацепление с указанной первой основной шестерней вдоль ее наружной периферии, относящейся к указанной оси вращения несущего винта, и указанная вторая шестерня основного модуля зацепляется с указанной второй основной шестерней по ее внутренней периферии относительно указанной оси вращения несущего винта для обеспечения вращения в противоположном направлении между указанной первой основной шестерней и указанной второй основной шестерней; и модуль поступательной тяги, введенный в зацепление с указанным входным модулем, причем указанный модуль поступательной тяги вращает вал трансмиссии вокруг оси вращения вала трансмиссии, обычно поперечной указанной оси вращения несущего винта.
| АВТОТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2487020C1 |
| US 3357656 А, 12.12.1967 | |||
| US 4489625 А, 25.12.1984 | |||
| US 4531692 А, 30.07.1985 | |||
| US 5271295 А, 21.12.1993 | |||
| Планетарная передача для вращения в противоположные стороны соосных воздушных винтов | 1943 |
|
SU63576A1 |
| Редуктор для соосных винтов противоположного вращения | 1946 |
|
SU70847A1 |

