ОБЛАСТЬ ТЕХНИКИ
Группа изобретений относится к медицинской технике, в частности к эндоскопическому хирургическому аппарату, способному манипулировать хирургическим инструментом в телероботизированной системе, и приводу указанного хирургического аппарата. Настоящая группа изобретений может быть применима в традиционном инструментарии для эндоскопической и открытой хирургии, а также применимо в хирургии с применением робототехники.
УРОВЕНЬ ТЕХНИКИ
Известен концевой эффектор (RU 2546957 С1, опубл. 10. 04.2015), где задача сведения-разведения рабочих частей хирургического инструмента решается механизмом управления приводом через ходовой механизм, содержащим передачу типа «винт-гайка». Функцию винта выполняет ходовой винт с элементами крепления рычагов ходового механизма, функцию гайки - коническая шестерня с резьбовой втулкой. Механическая часть, регулирующая положение инструмента, работает по принципу преобразования вращательного движения передачи «винт-гайка» в возвратно-поступательное движение, передающее это движение на рычаги сведения-разведения рабочей части концевого эффектора.
Недостатками данного технического решения являются:
- сложность изготовления мелкомодульной конической шестерни (m=0,3);
- мелкий модуль ограничивает возможность повышения передачи крутящего момента из-за малого диаметра и низких прочностных характеристик зуба конической шестерни;
- высокий коэффициент трения в передаче «винт-гайка» на диаметре резьбы М2 и соответственно большая вероятность заклинивания хода.
Известна конструкция механизма управления концевым эффектором с помощью шарнирного узла состоящего из трех шарниров, каждый из которых имеет одну степень свободы (W=1) (RU 2541829 С1, опубл. 20.02.2015).
Управление каждым шарниром и вращение концевого эффектора с инструментом производится червячным редуктором, состоящим из независимых червячных пар. Каждое червячное колесо жестко соединено со своим приводным валом. Приводные валы расположены коаксиально, имеют разные диаметры, длину и передают крутящие моменты к соответствующим зубчатым коническим шестерням шарниров. Вал, управляющий концевым эффектором, представляет собой карданный вал.
Отклонение от оси каждого шарнира составляет ±75° во взаимно перпендикулярных плоскостях, вращение шарнира с концевым эффектором возможно на 360° в любом направлении вокруг собственной оси.
Указанное техническое решение обладает следующими недостатками:
- сложность конструкции, изготовления и сборки;
- относительно большие габариты корпусов шарниров, обусловленные тем, что в каждом корпусе необходимо разместить дифференциальную коническую передачу, необходимую для его отклонения от оси;
- сложность в соблюдении соосности корпусов шарниров и межосевого расстояния пары конических зубчатых колес, что прямо влияет на плавность хода и возникновения недопустимых люфтов в зацеплении;
- малый (недостаточный) угол отклонения корпусов шарниров и соответственно концевого эффектора с инструментом, что усложняет работу хирурга в операционном поле;
- невозможность вращения концевого эффектора с инструментом относительно своей оси в отклоненном положении корпуса шарнира;
- червячные передачи являются самотормозящимися (при обратном ходе ведомый вал не может провернуть ведущий из-за малого угла подъема винтовой линии), т.е. при возможном экстренном выводе инструмента через троакар разведенные рабочие части инструмента и корпуса шарниров будут оказывать препятствие движению, т.к. останутся в рабочем, несоосном положении;
- каждый шарнир имеет по одной степени свободы (W=1).
Также известно устройство (US 2014214049 А1, опубл. 31.07.2014), относящееся к малоинвазивной хирургии и состоящее из концевого эффектора с хирургическим инструментом и шарнирной секцией, по оси которой расположен вал, сообщающий ручным механизмом привода возвратно-поступательное движение связанным с ним тягам инструмента, обеспечивая открытие/закрытие его рабочих частей. Сферические элементы шарнирной секции соединены через промежуточные кольца и имеют пазы в форме канавки, позволяющие шарнирам двигаться друг относительно друга в двух взаимно перпендикулярных плоскостях при соответствующем натяжении системы тросов жестко закрепленных на корпусе концевого эффектора.
К недостаткам можно отнести следующее:
- сложная конструкция и технология изготовления шарнирной секции, включающая в себя: промежуточные кольца, направляющие штифты, пазы на сферической поверхности и, как следствие, ограниченный (малый) угол отклонения шарниров;
- отсутствует осевое вращение концевого эффектора с инструментом при различных углах наклона шарниров, что существенно снижает оперативные возможности хирурга в операционном поле;
- представленная конструкция разработана исключительно для работы с ручным приводом и не предназначена для роботизированного мехатронного хирургического комплекса.
Наиболее близким аналогом хирургического эндоскопического устройства является шарнирный хирургический инструмент для эндоскопических процедур (US 2014058363 А1, 27.02.2014), который состоит из спусковой ручки, с помощью которой осуществляется управление, соединительного корпуса, жестко связанного с гибкой шарнирной секцией, внутри которого проходит гибкий толкатель и тросы для управления углом отклонения концевого эффектора, вращением концевого эффектора и смыканием/размыканием инструмента. В корпусе спусковой ручки расположены два двигателя для управления натяжением тросов, определяющих положение гибкой секции, и замковый узел, позволяющий менять тип инструмента в ходе операции, а также предотвращающий использование инструмента свыше установленного количества применений.
Недостатками технического решения являются:
- гибкая секция выполнена в виде сегментов из плоских цилиндров с небольшой конусностью по противоположным торцам, т.е. жесткость конструкции и точность движения сегментов не может быть обеспечена только четырьмя тросами, проходящими через отверстия, расположенными по периферии во взаимно перпендикулярных плоскостях, и гибким валом, проходящим через отверстие в центре сегмента с определенным зазором, наличие которого также не дает возможности жесткой фиксации сегментов относительно оси;
- невозможность применения устройства для роботизированного мехатронного хирургического комплекса из-за отсутствия устройства сопряжения с модульной конструкцией.
В уровне техники также известен приводной механизм хирургического эндоскопического устройства (RU 2541829 С1, опубл. 20.02.2015), состоящий из четырех независимых червячных редукторов, расположенных в корпусе, и системы коаксиально расположенных телескопических приводных валов. Каждый вал передает крутящий момент на соответствующий шарнирный узел и управляющий механизм концевого эффектора. Три червячные пары обеспечивают работу шарнирного узла: отклонение шарниров от оси, вращение вала с концевым эффектором; четвертая пара преобразует вращательное движение ведомого колеса в возвратно-поступательное движение ходового винта, жестко соединенного с приводным валом обеспечивая сведение/разведение инструмента концевого эффектора.
Недостатками известного приводного механизма являются:
- ограничение по времени сведения/разведения рабочих частей инструмента концевого эффектора, которое находится в пределах 0,5 секунд, т.е. в рассматриваемом случае обеспечение скорости возвратно-поступательного движения ходового винта, жестко связанного с приводным валом и тягами рабочего инструмента, будет зависеть, во-первых, от передаточного отношения червячной пары, т.е. угловой скорости ведомого колеса червячной пары, во-вторых, от шага ходового винта, имеющего при диаметре М14 небольшую величину S=1.4 мм, что соответственно потребует применения электродвигателя с высоким числом оборотов и большей мощностью для преодоления трения винтовой передачи.
- самоторможение, связанное с применением червячной пары, препятствует смыканию инструмента при экстренном выводе манипулятора из троакара, о чем уже выше упоминалось.
Наиболее близким аналогом для механизма управления концевым эффектором хирургического эндоскопического инструмента, в частности приводного механизма, является (US 2010011900 А1, опубл. 21.01.2010), приводной механизм медицинского инструмента, включающий в себя первый вал привода; первый зубчатый компонент, включающий в себя рейку, находящуюся в зацеплении с первым валом привода так, что вращение первого вала привода перемещает первый зубчатый компонент, причем первый трос соединяется с первым зубчатым компонентом; первый рычаг, имеющий второй трос, соединенный с первым концом первого рычага, при этом второй конец первого рычага находится в контакте с первым зубчатым компонентом; второй вал привода; второй зубчатый компонент, включающий в себя рейку, находящуюся в зацеплении со вторым валом привода так, что вращение второго вала привода перемещает второй зубчатый компонент, причем третий трос соединяется со вторым зубчатым компонентом; второй рычаг, имеющий четвертый трос, соединенный с первым концом второго рычага, при этом второй конец второго рычага находится в контакте со вторым зубчатым компонентом, третий вал привода; и третий зубчатый компонент, включающий в себя первую ось шарнира, вокруг которой поворачивается первый рычаг и вторую ось шарнира, вокруг которой поворачивается второй рычаг, при этом третий зубчатый компонент находится в зацеплении с третьим валом привода так, что вращение третьего вала приводит к качанию третьего зубчатого компонента вокруг оси поворота.
Механизм управления концевым эффектором хирургического эндоскопического устройства может регулировать угол наклона запястного шарнира на дистальном конце основного вала с помощью приводного вала, соединенного с косозубой парой.
Недостатками приводного механизма являются:
- сложная кинематическая связь и, как следствие, конструктивная сложность механизма привода;
- большая трудоемкость, связанная с изготовлением реечной передачи.
Таким образом, существует потребность в снижении усилия, необходимого для приведения в действие концевого эффектора до уровня, который находится в пределах возможностей большей части хирургов; а также в усовершенствованных механизмах для управления перемещением и приведением в действие концевого эффектора на эндоскопическом хирургическом устройстве в ограниченном операционном поле, в упрощении сборки концевого эффектора и возможности применения устройства для роботизированного мехатронного хирургического комплекса.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей, на достижение которой направлена заявляемая группа изобретений, является создание усовершенствованного по сравнению с аналогами концевого эффектора эндоскопического хирургического аппарата, упрощенного в сборке, с гибкой шарнирной секцией из звеньев и с механизмом управления, позволяющим сочетать и реализовать различные функциональные возможности позиционирования концевого эффектора.
Технический результат группы изобретения заключается в повышении точности позиционирования концевого эффектора в ограниченном операционном поле за счет использования определенной конструкции шарнирной секции из звеньев, позволяющей отклоняться концевому эффектору на необходимый угол, и механизма управления концевым эффектором, выполняющим одновременно возвратно-поступательное движение гибкого вала для обеспечения смыкания или размыкания рабочих частей хирургического инструмента и вращение концевого эффектора при различных углах отклонения шарнирной секции.
Для достижения указанного технического результата предлагаемое хирургическое эндоскопическое устройство и привод для него выполнены следующим образом.
Хирургическое эндоскопическое устройство содержит концевой эффектор, состоящий из корпуса, в котором расположен толкатель, соединенный с хирургическим инструментом; механизм управления концевым эффектором, который имеет гибкий вал, шарнирную секцию из звеньев и тросы; привод, который имеет механизм управления тросами и узел привода гибкого вала; при этом гибкий вал жестко соединен с одной стороны с валом привода, а с другой - с толкателем концевого эффектора; звенья выполнены со стыковочными конгруэнтными полусферическими поверхностями с отверстием по центру для гибкого вала и отверстиями на периферии звеньев для тросов; тросы связаны с одной стороны с механизмом управления тросами, а с другой - жестко закреплены на краевом звене шарнирной секции, закрепленном на корпусе концевого эффектора; при этом другое краевое звено шарнирной секции фиксировано на соединительном корпусе, внутри которого проходят гибкий вал, тросы и вал привода; механизм управления тросами сообщает тяговое усилие по меньшей мере одному тросу, а узел гибкого вала сообщает посредством вала привода вращательное движение гибкому валу и/или возвратно-поступательное движение гибкому валу и толкателю; при этом привод выполнен с возможностью одновременно осуществлять возвратно-поступательное и вращательные движения гибкого вала при заданных углах наклона шарнирной секции из звеньев.
В некоторых вариантах реализации гибкий вал содержит сердечник с навитой пружиной.
В некоторых вариантах реализации на краевом звене шарнирной секции выполнена кольцевая проточка, на которой с возможностью вращения вокруг своей оси располагается корпус концевого эффектора, при этом краевое звено зафиксировано на корпусе концевого эффектора фиксирующими штифтами.
В некоторых вариантах реализации толкатель выполнен в виде ступенчатого цилиндра, расположен в отверстии корпуса концевого эффектора и подпружинен возвратной пружиной.
В некоторых вариантах реализации возвратная пружина установлена на нижней части толкателя меньшего диаметра в распор между гайкой регулировочной и толкателем концевого эффектора, при этом гайка регулировочная с наружной резьбой ввинчена в корпус концевого эффектора.
В некоторых вариантах реализации устройство дополнительно содержит узел сопряжения с приводом для взаимодействия с роботизированным мехатронным хирургическим комплексом, при этом узел сопряжения выполнен в виде шлицевых полумуфт, расположенных на корпусе привода.
Привод указанного выше хирургического эндоскопического устройства содержит механизм управления тросами и узел привода гибкого вала, при этом узел привода гибкого вала имеет независимые механизмы, приводимые в движение электродвигателями и обеспечивающие смыкание или размыкание рабочих частей хирургического инструмента концевого эффектора и вращательное движение концевого эффектора с хирургическим инструментом соответственно, и устройство, обеспечивающее раздельную или одновременную работу обоих механизмов, а механизм управления тросами имеет блоки натяжения тросов для отклонения концевого эффектора в двух взаимно перпендикулярных плоскостях, приводимые в движение электродвигателями; при этом первый блок механизма управления тросами содержит соединенные тросами роликовый барабан, в котором тросы уложены навстречу друг другу, и направляющие ролики; а второй блок механизма управления тросами содержит последовательно соединенные тросами направляющие ролики, распределительный ролик и роликовый барабан; при этом механизм, обеспечивающий смыкание или размыкание рабочих частей хирургического инструмента концевого эффектора содержит цилиндрическую прямозубую зубчатую передачу в виде шестерни и колеса, причем колесо соединено с тягой направляющей вала привода, сопряженной с валом привода; устройство, обеспечивающее раздельную или одновременную работу независимых механизмов, выполнено в виде шлицевой муфты, состоящей из полого вала с пазом под шлиц и шлицевой вставки, жестко связанной с вкладышем вала направляющей и валом привода; а механизм, обеспечивающий вращательное движение концевого эффектора с хирургическим инструментом, содержит одноступенчатую косозубую зубчатую передачу в виде ведущего колеса и ведомого колеса, установленного на полом валу.
В некоторых вариантах реализации на валу колеса цилиндрической прямозубой передачи установлена сошка, на осях которой закреплена тяга направляющей вала привода.
В некоторых вариантах реализации между вкладышем и валом привода установлена упорная втулка.
Соединение шарнирной секции из звеньев осуществляется через звенья, где каждое звено опирается своей полусферой в предыдущее и является опорой для последующего, и движение звеньев происходит строго по закону, описывающему сферическую поверхность. Дополнительная жесткость шарнирной секции обеспечивается гибким валом, жестко связанным с одной стороны с валом привода, с другой - с толкателем концевого эффектора, чем достигается точность позиционирования хирургического инструмента.
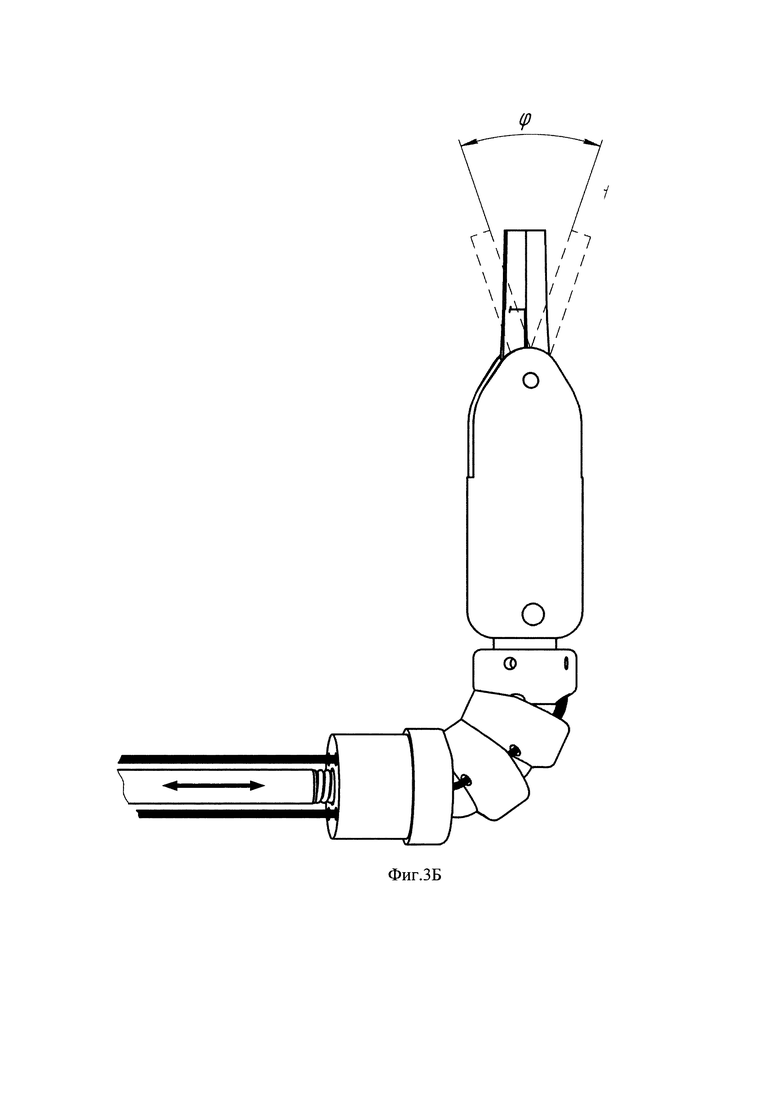
Применение в конструкции шарнирной секции гибкого вала исключает заклинивание, обеспечивает плавность хода, возможность одновременного вращения концевого эффектора с хирургическим инструментом при угловых перемещениях φ=±90° (у аналога φ=±75°) и сведение/разведение рабочих частей хирургического инструмента.
Конструкция шарнирной секции позволяет не ограничиваться двумя взаимно перпендикулярными плоскостями отклонения, так как полусферические шарниры могут отклоняться в любых плоскостях в зависимости от количества тросов.
Использование звеньев со стыковочными конгруэнтными полусферическими поверхностями в шарнирной секции существенно уменьшает ее длину (на 10 мм по сравнению с аналогами), уменьшает трение в соединении, увеличивает число степеней свободы шарнира W=2, общее для концевого эффектора W=6 (у аналога W=1 и W=4 соответственно), что предоставляет большие возможности в ограниченном операционном поле.
Установленная в корпус концевого эффектора возвратная пружина обеспечивает экстренный вывод хирургического инструмента через троакар. Указанная пружина при сведении рабочих частей хирургического инструмента срабатывает на сжатие и не препятствует выводу эндоскопического аппарата.
Приводной механизм управления концевым эффектором хирургического эндоскопического устройства позволяет осуществлять угловые перемещения концевого эффектора в любых плоскостях, вращения концевого эффектора вокруг своей оси с хирургическим инструментом, сведения или разведения рабочих частей хирургического инструмента, сведение или разведение рабочих частей хирургического инструмента при различных углах отклонения концевого эффектора относительно продольной оси устройства и одновременное вращение концевого эффектора относительно своей оси в указанных угловых пределах.
Использование одноступенчатого прямозубого редуктора позволило увеличить передаточное отношение до i=5, что позволяет создать большие усилия сжатия на рабочих поверхностях инструментов, что обеспечит более надежную фиксацию хирургических инструментов (игл, клипсов и т.д.) без увеличения мощности двигателя и существенно уменьшит трение в зацеплении по сравнению с аналогами.
Использование шлицевой муфты, позволяющей одновременно осуществлять возвратно-поступательное движение направляющего вала и вала привода для обеспечения смыкания/размыкания рабочих частей хирургического инструмента и осуществлять вращение концевого эффектора при различных кренах шарнирной секции, позволит повысить точность позиционирования концевого эффектора.
Таким образом, заявляемая конструкция концевого эффектора с шарнирной секцией хирургического эндоскопического устройства и привод в крайних угловых положениях обеспечивает устойчивость концевого эффектора, при угловых перемещениях обеспечивает плавность хода и исключает заклинивание, обеспечивает экстренный вывод хирургического инструмента через троакар, что увеличивает возможности использования указанного устройства в ограниченном операционном поле.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения. На чертежах одинаковые позиции применяются для обозначения одинаковых частей.
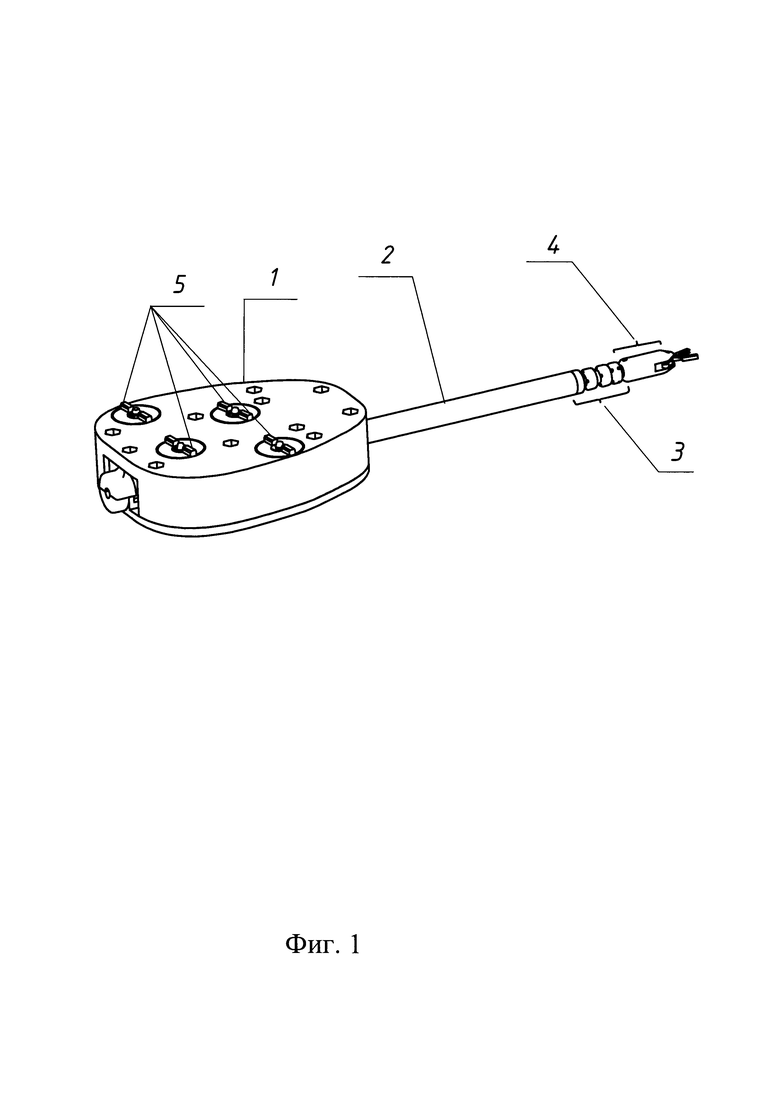
На фиг. 1 представлен внешний вид механизма управления концевым эффектором.
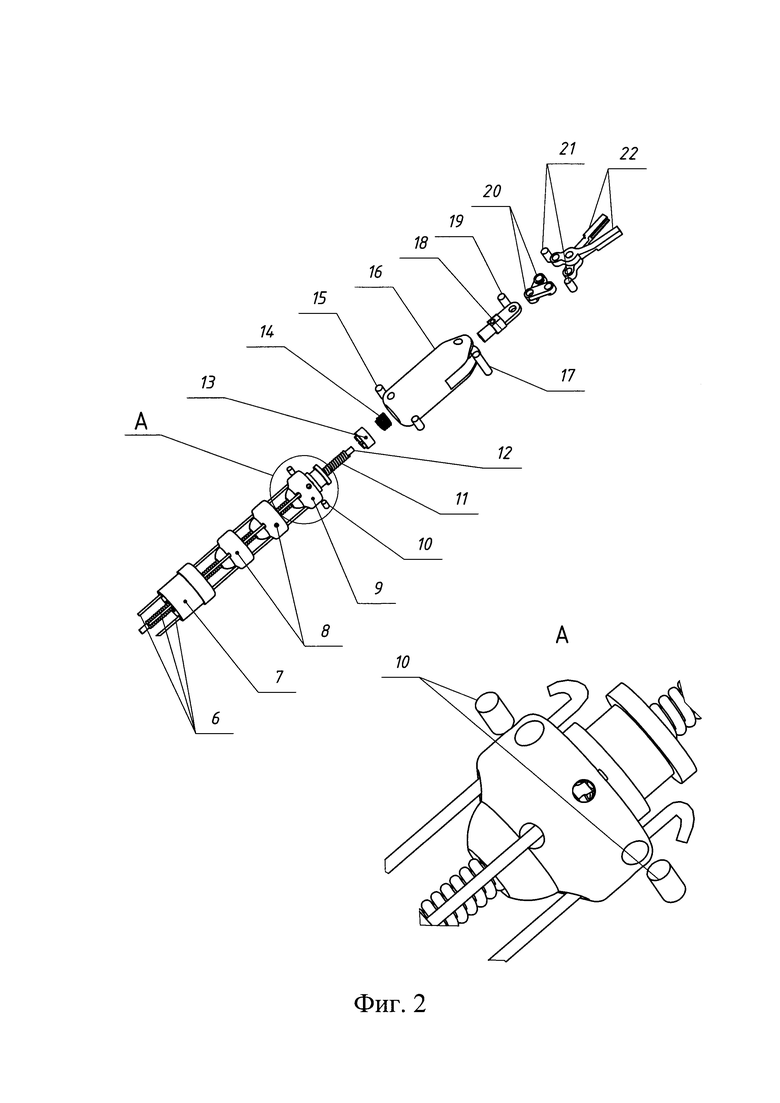
На фиг. 2 представлен общий вид с пространственным разделением деталей конструкции концевого эффектора и шарнирной секции.
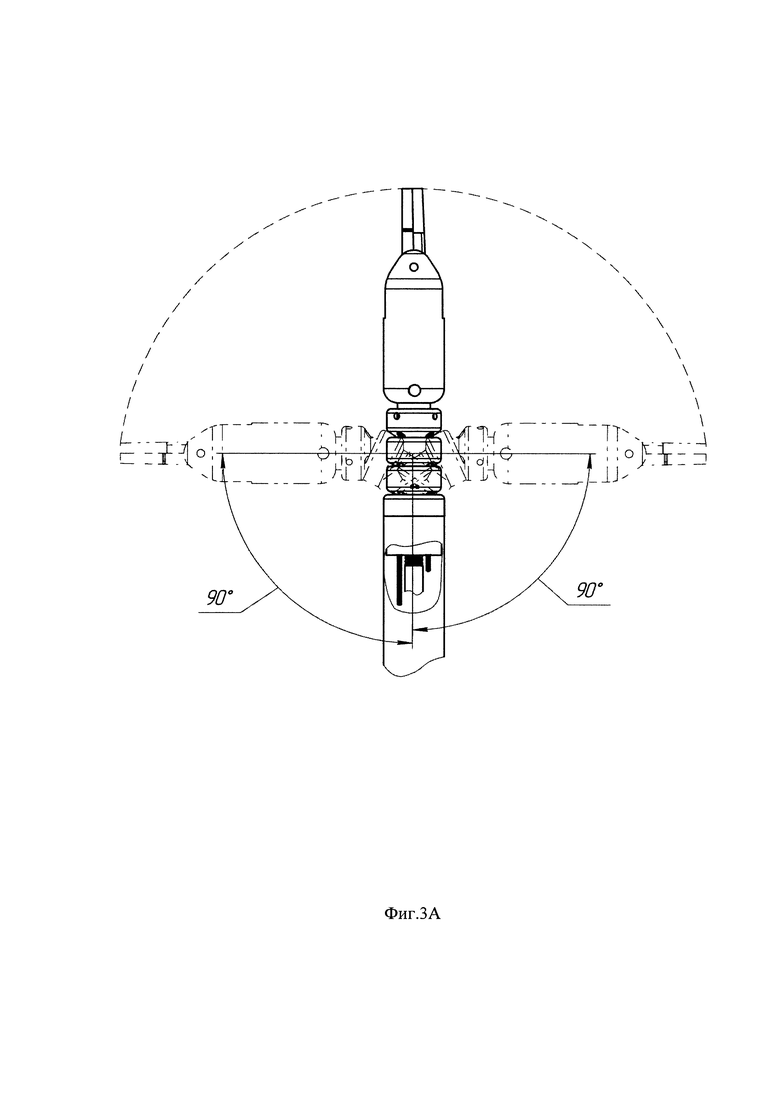
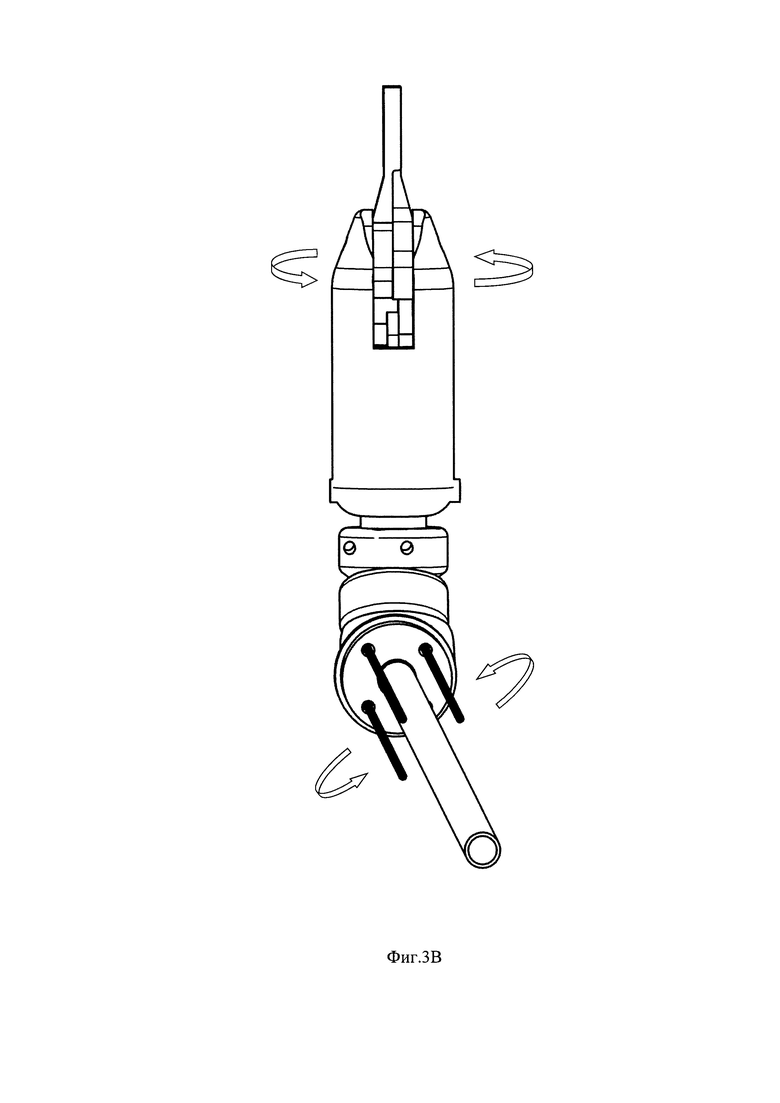
На фиг. 3A-3В изображена работа шарнирной секции с концевым эффектором.
На фиг. 3А представлен вид сбоку, изображающий шарнирный поворот концевого эффектора.
На фиг. 3Б представлен вид, изображающий сведение или разведение рабочих частей хирургического инструмента, осуществляемое гибким валом, при шарнирном повороте концевого эффектора.
На фиг. 3В представлен вид, изображающий вращение корпуса концевого эффектора с хирургическим инструментом, при шарнирном повороте концевого эффектора.
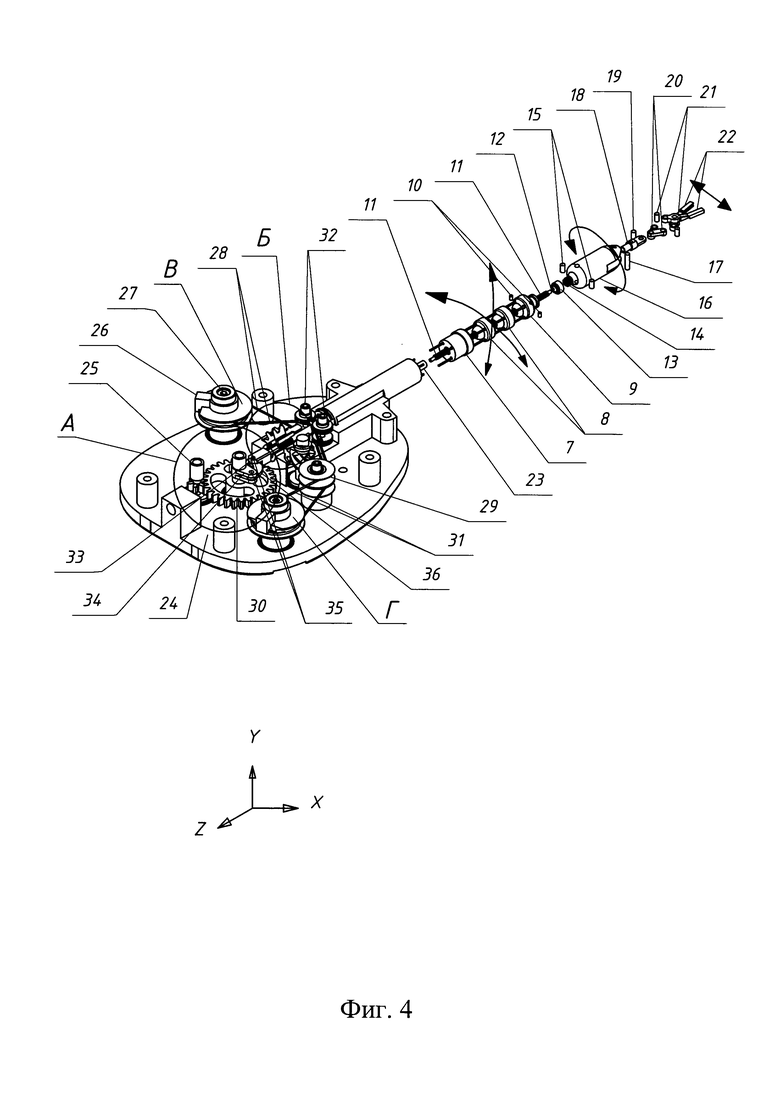
На фиг. 4 изображен детальный вид механизма привода.
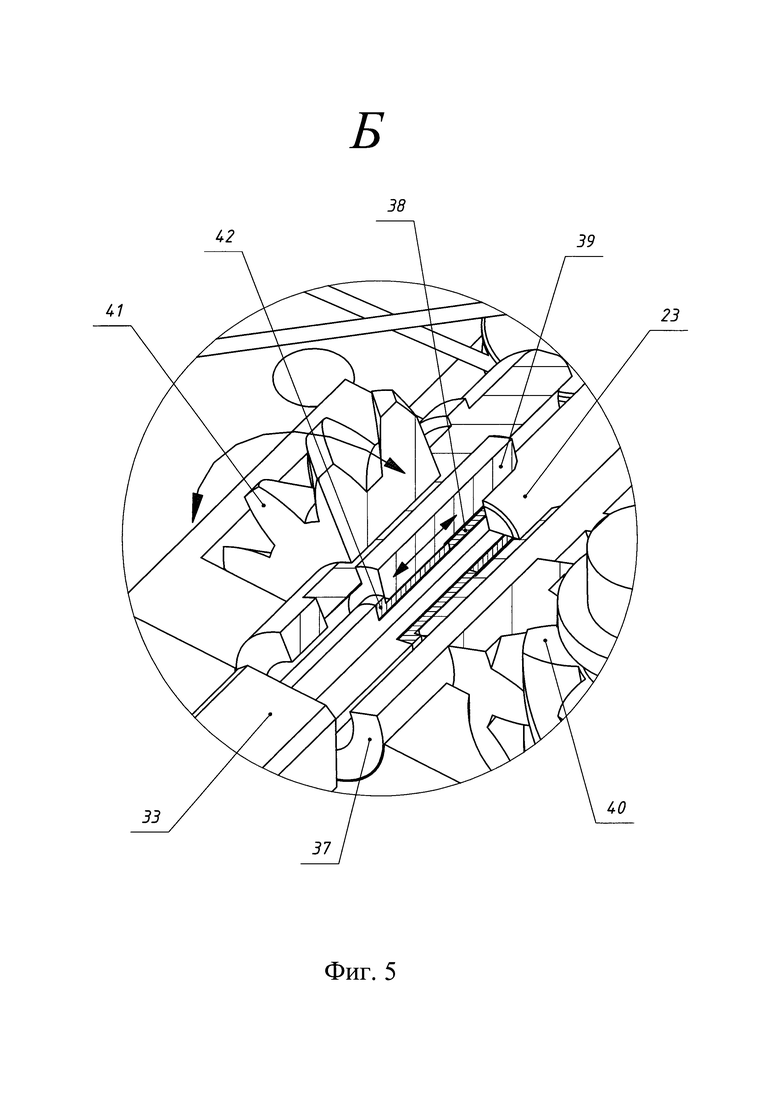
На фиг. 5 представлена конструкция механизма, совмещающего возвратно-поступательное и вращательное движения приводного вала.
ОБОЗНАЧЕНИЯ
Механизм управления концевым эффектором состоит из следующих узлов (фиг. 1):
1 - Корпус управления приводом;
2 - Корпус соединительный;
3 - Шарнирная секция;
4 - Концевой эффектор с хирургическим инструментом;
5 - Шлицевая полумуфта.
Общий вид конструкции концевого эффектора и шарнирной секции (фиг. 2):
6 - Трос;
7 - Краевое звено шарнирной секции;
8 – Звено промежуточное;
9 - Краевое звено шарнирной секции;
10 - Клин;
11 - Гибкий вал;
12 - Сердечник гибкого вала;
13 - Гайка регулировочная;
14 - Пружина возвратная;
15 - Штифт;
16 - Корпус концевого эффектора;
17 - Ось хирургического инструмента;
18 - Толкатель;
19 - Ось толкателя;
20 - Тяга;
21 - Штифт тяги;
22 - Хирургический инструмент;
23 - Вал привода.
Приводной механизм состоит из следующих деталей (фиг. 4):
24 - Основание корпуса;
25 - Шестерня ведущая прямозубая;
26 - Рычаг;
27 - Винт зажимной;
28 - Трос барабана В;
29 - Ролик направляющий;
30 - Колесо прямозубое;
31 - Трос барабана Г;
32 - Ролик распределительный;
33 - Направляющая;
34 - Сошка;
35 - Ось;
36 - Тяга направляющей.
А - Прямозубая пара;
Б - Косозубая пара;
В - Роликовый барабан;
Г - Роликовый барабан.
Механизм, совмещающий возвратно-поступательное и вращательное движения вала привода (фиг. 6):
37 - Вал полый;
38 - Втулка упорная;
39 - Вставка шлицевая;
40 - Колесо ведущее косозубое;
41 - Колесо ведомое косозубое;
42 - Вкладыш.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В общем настоящая группа изобретений предлагает устройство управления перемещением, то есть поворотом, вращением и приведением в действие, а именно смыканием или размыканием рабочих частей хирургического инструмента, концевого эффектора хирургического эндоскопического устройства.
Хирургическое эндоскопическое устройство может содержать соединительный корпус, имеющий дистальный конец с концевым эффектором с хирургическим инструментом для захвата ткани и подачи, по меньшей мере, одного соединительного элемента в захваченную ткань, и проксимальный конец с корпусом, в котором расположен приводной механизм. Приводной механизм выполнен с возможностью осуществления как поворота, вращения, так и приведения в действие хирургического инструмента, расположенного в концевом эффекторе.
На фиг. 1 изображен вариант осуществления хирургического эндоскопического устройства, которое содержит концевой эффектор 4, соединенный через шарнирную секцию из звеньев 3 с соединительным корпусом 2, внутри которого проходят тросы управления шарнирной секции 3, гибкий вал, жестко соединенный с одной стороны с валом привода, а с другой - с концевым эффектором 4, и привод, расположенный в корпусе 1 и функционально связанный с соединительным корпусом 2, шарнирной секцией 3, концевым эффектором 4 и с устройством сопряжения мехатронного эндоскопического хирургического аппарата через шлицевые полумуфты 5.
Привод имеет механизм управления тросами и узел привода гибкого вала и выполнен с возможностью передачи тягового усилия тросам для управления шарнирной секцией 3 и обеспечивающий: отклонение концевого эффектора 4 относительно продольной оси соединительного корпуса 2, вращение концевого эффектора 4 относительно своей оси на φ=±360°, сведения или разведения рабочих частей хирургического инструмента, сведение или разведение рабочих частей хирургического инструмента при различных углах отклонения концевого эффектора относительно продольной оси соединительного корпуса и одновременной возможности вращения концевого эффектора относительно своей оси в указанных угловых пределах.
Конкретная конфигурация хирургического эндоскопического устройства с концевым эффектором может изменяться, и механизм управления концевым эффектором можно применять во многих различных хирургических аппаратах.
Соединительный корпус 2 выполнен полым с возможностью изгиба в области шарнирной секции 3. Концевой эффектор 4 присоединен к соединительному корпусу 2 через шарнирную секцию из звеньев 3 с возможностью вращения вокруг оси соединительного корпуса 2 и углового перемещения относительно оси указанного корпуса 2.
Концевой эффектор 4 может иметь много различных конфигураций, но в одном варианте осуществления концевой эффектор в качестве хирургического инструмента содержит клип-аппликатор (противоположные зажимы для захвата ткани между ними).
Концевой эффектор 4 (фиг. 1) состоит из корпуса 16 (фиг. 2), в ответном отверстии которого с небольшим зазором расположен толкатель 18, соединенный с хирургическим инструментом 22 с одной стороны и с гибким валом 11 с другой.
Рабочие части хирургического инструмента 22 соединены между собой осью 17 хирургического инструмента, при этом рабочие части непосредственно крепятся на тягах 20 хирургического инструмента 22 через штифты 21. Тяги 20 входят в зацепление с осью 19 толкателя, который передает усилие от гибкого вала 11 тягам 20.
Толкатель 18 выполнен в виде ступенчатого цилиндра и в нижней части подпружинен возвратной пружиной 14. Возвратная пружина 14 установлена на нижней части толкателя 18 меньшего диаметра в распор между гайкой регулировочной 13 и толкателем 18 для изменения жесткости пружины, необходимой при настройке инструмента, при этом гайка регулировочная 13 с наружной резьбой ввинчена в корпус 16 концевого эффектора.
Корпус 16 концевого эффектора крепится на краевом звене 9 шарнирной секции, которое является основанием для корпуса 16, с возможностью вращения вокруг своей оси.
На краевом звене 9 выполнена кольцевая проточка, на которой зафиксирован корпус концевого эффектора фиксирующими штифтами 15. При этом вращение корпуса концевого эффектора обеспечивается движением корпуса вдоль кольцевой проточки (фиг. 3, вид В).
Гайка регулировочная 13 является неподвижным телом и соединяет нижнюю часть толкателя 18 меньшего диаметра, который имеет возможность совершать возвратно-поступательные движения.
Шарнирная секция из звеньев имеет два краевых звена 7, 9 и промежуточные звенья 8. Звенья шарнирной секции выполнены со стыковочными конгруэнтными полусферическими поверхностями с отверстием по центру для гибкого вала 11 и отверстиями на периферии звеньев для тросов 6.
К одному краевому звену 9 крепится корпус 16 концевого эффектора и жестко закрепляются тросы 6 с помощью клиньев 10, которые впоследствии фиксируются сваркой и зашлифовываются, а другое краевое звено 7 приварено торцом к соединительному корпусу 2 (фиг. 1) и имеет вогнутую поверхность.
Промежуточные звенья 8 имеют с одного торца выпуклую, с другого торца вогнутую полусферы. Таким образом, каждое звено опирается своей полусферой в предыдущее и является опорой для последующего, и движение звеньев происходит строго по закону описывающему сферическую поверхность, обеспечивающее максимальный контакт со сферической опорой определяя надежность работы.
Каждое звено имеет возможность отклонения от оси на φ=±30°, кроме краевого звена 9, которое является опорой для корпуса 16 концевого эффектора. То есть суммарно два промежуточных звена 8 и краевое звено 9 обеспечивают отклонение корпуса концевого эффектора в двух перпендикулярных плоскостях на угол φ=±90° (фиг. 3А, 3Б, 3В) посредством приложения сил к двум парам тросов 6, жестко закрепленных на краевом звене 9.
Через центральное отверстие звеньев шарнирной секции проходит гибкий вал 11, который также является сердечником конструкции шарнирной секции 3 (фиг. 1), приводом концевого эффектора и имеет необходимую длину, не мешающую отклонению звеньев.
Гибкий вал 11 жестко связан с одной стороны с валом привода 23 (фиг. 4), а с другой - с толкателем 18 (фиг. 2) корпуса 16 концевого эффектора. Гибкий вал 11 обеспечивает дополнительную жесткость шарнирной секции 3 и обеспечивает точность позиционирования хирургического эндоскопического инструмента в ограниченном пространстве хирургического поля.
Вал привода 23 является трубкой. Гибкий вал 11 содержит сердечник 12 с навитой пружиной для исключения вытягивания. Сердечник 12 гибкого вала 11 выполняет функции, обеспечивающие устойчивость в крайних угловых положениях, передачи крутящего момента для вращения корпуса концевого эффектора с хирургическим инструментом 4 вокруг своей оси и сведения или разведения рабочих частей хирургического инструмента 22.
Закрепленные на краевом звене 9 шарнирной секции 3 тросы 6 связаны с другой стороны с механизмом управления тросами. Тросы 6 проходят через отверстия, расположенные по периферии звеньев 7, 8, 9.
В конкретном варианте осуществления используются четыре троса 6, проходящие через периферийные отверстия звеньев во взаимно перпендикулярных плоскостях, для управления шарнирной секцией 3 и концевым эффектором с хирургическим инструментом 4. Однако количество тросов для управления шарнирной секцией и концевым эффектором с хирургическим инструментом может варьироваться в зависимости от задач применения хирургического эндоскопического устройства. Так, звенья могут отклоняться в любых плоскостях в зависимости от количества тросов, например, три троса прикрепленные к звеньям через φ=120° позволяют изменять угол наклона в трех плоскостях и так далее.
Устройство также содержит приводной механизм (фиг. 4) управления перемещением и приведением в действие концевого эффектора 4. Перемещение может включать в себя поворот концевого эффектора 4 вокруг продольной оси соединительного корпуса 2, наклон концевого эффектора 4 на заданный угол по отношению к продольной оси соединительного корпуса 2 и приведение в действие концевого эффектора 4, посредством чего смыкаются рабочие части хирургического инструмента 22 для захвата ткани.
В одном из вариантов осуществления приводной механизм функционально связан с корпусом управления приводом 1 и концевым эффектором 4 так, что он может одновременно осуществлять приведение в действие концевого эффектора 4, его поворот при заданных углах наклона шарнирной секции 3 из звеньев. Приводной механизм может быть выполнен в различных конфигурациях, однако в настоящем варианте осуществления привод имеет механизм управления тросами, который сообщает тяговое усилие по меньшей мере одному тросу для наклона концевого эффектора на заданный угол, и узел гибкого вала, который сообщает посредством вала привода вращательное движение гибкому валу и/или возвратно-поступательное движение гибкому валу и толкателю для раздельного или одновременного вращения концевого эффектора и приведения в действие концевого эффектора при заданных углах наклона шарнирной секции из звеньев.
Механизм управления тросами и узел гибкого вала расположены на основании 24 корпуса управления приводом 1.
Механизм управления тросами позволяет осуществлять движение шарнирной секции из звеньев 3 и соответственно производить поворот на заданный угол корпуса 16 концевого эффектора с хирургическим инструментом 4 (фиг. 3А, 3Б, 3В).
Управление тросами осуществляется роликовыми барабанами В и Г (фиг. 4), приводящимися в действие шаговыми двигателями. В настоящем варианте осуществления работа шарнирной секции 3, то есть, отклонение звеньев в двух взаимно перпендикулярных плоскостях, осуществляется с помощью двух пар тросов 6, натяжение которых производится блоками натяжения тросов. Первый блок натяжения тросов содержит роликовый барабан В, при этом каждый трос из пары тросов 28 барабана В, отклоняющих концевой эффектор 4 в плоскости «XZ», устанавливается в соответствующие распределительные ролики 32 (фиг. 4), далее тросы 28 укладываются навстречу друг другу в ролик барабана В, зажимаются рычагом 26 и фиксируются винтом 27. Второй блок натяжения тросов содержит роликовый барабан Г, при этом тросы 31 барабана Г из пары, отклоняющей концевой эффектор 4 в плоскости «YZ», также устанавливаются в соответствующие распределительные ролики 32, далее укладываются по высоте в направляющие ролики 29, затем в ролик барабана Г и аналогично фиксируются.
Диаметр роликовых барабанов В и Г рассчитан таким образом, чтобы обеспечить отклонение концевого эффектора с хирургическим инструментом 4 (Фиг. 3А) на углы φ=±90° относительно оси соединительного корпуса 2 (фиг. 1) в плоскостях «XZ» и «YZ» соответственно.
Крутящий момент соответствующего роликового барабана сообщает тяговое усилие закрепленному на нем тросу для изменения угла наклона шарнирной секции в заданной плоскости.
В качестве узла привода гибкого вал применены два независимых механизма и устройство, обеспечивающее раздельную или одновременную работу обоих механизмов:
- механизм, обеспечивающий смыкание или размыкание рабочих частей хирургического инструмента;
- механизм, обеспечивающий вращательное движение концевого эффектора с хирургическим инструментом.
Механизм, обеспечивающий смыкание или размыкание рабочих частей хирургического инструмента 22, представляет собой одноступенчатый редуктор с прямозубой парой А (фиг. 4) с передаточным отношением i=5 и содержит цилиндрическую прямозубую зубчатую передачу в виде шестерни 25 и колеса 30, причем вал колеса 30 имеет сошку 34, которая соединена тягой 36 посредством осей 35 с направляющей 33 вала привода 23, жестко соединенного сваркой с гибким валом 11. Гибкий вал 11, с другой стороны, приварен к толкателю 18, который, в свою очередь, соединен с хирургическим инструментом 22 через тяги 20 посредством осей 19, 21.
Смыкание рабочих частей хирургического инструмента 22 производится следующим образом. При вращении шестерни 25, которая вращает колесо 30, усилие передается через вал колеса 30 сошке 34. Возникающее радиальное перемещение сошки 34 передается через тягу направляющей 33 вала привода и непосредственно валу привода 23, который начинает перемещаться вдоль своей оси. Перемещение направляющей 33 вызывает перемещение вала привода 23, жестко связанного с ним гибкого вала 11 и толкателя концевого эффектора 18. Втягивающее усилие толкателя 18 сводит вместе тяги 20 (фиг. 2) хирургического инструмента, тем самым смыкая рабочие поверхности инструмента с заданным усилием. При смыкании рабочих частей хирургического инструмента 22 возвратная пружина 14 находится в сжатом состоянии.
Размыкание рабочих частей хирургического инструмента 22 происходит автоматически при окончании передачи тягового усилия, инициированного оперирующим хирургом, то есть при отключении привода прямозубой пары А.
Размыкание обеспечивается при обратном ходе вала привода 23. При ослаблении тянущего усилия возвратная пружина 14 разжимается, опираясь на неподвижную гайку регулировочную 13, давит на нижнюю часть толкателя меньшего диаметра 18, и происходит обратное движение. Толкатель 18 концевого эффектора возвращается в исходное состояние, тем самым разводя рабочие части хирургического инструмента 22.
Максимальный угол разведения в зависимости от типа инструмента может меняться от 22° до 38° и исполняется (ограничивается) конструкцией самого инструмента.
Таким образом смыкание или размыкание рабочих частей хирургического инструмента 22 производится за счет возвратно-поступательного движения цепочки: прямозубая пара А - тяга направляющей 33 - направляющая 33 - вал привода 23 - гибкий вал 11 - толкатель 18 - тяги 20 - хирургический инструмент 22 - за счет вращения в разных направлениях колеса 30 прямозубой пары редуктора.
Механизм, обеспечивающий вращение концевого эффектора, представляет собой одноступенчатый редуктор с косозубой парой Б (фиг. 4) и передаточным отношением i=1.25 и содержит одноступенчатую косозубую зубчатую передачу в виде ведущего колеса 40 и ведомого колеса 41; которая передает крутящий момент цепочке: косозубая пара Б - вставка шлицевая 39 (фиг. 5) - вал привода 23 - гибкий вал 11 - толкатель 18 - тяги 20 - хирургический инструмент 22, передающий крутящий момент через ось 17, связывающую хирургический инструмент 22 с корпусом 16 концевого эффектора и обеспечивающий его вращение.
Вращение корпуса концевого эффектора с хирургическим инструментом 4 возможно на φ=±360°.
В качестве устройства, обеспечивающего раздельную или одновременную работу обоих механизмов, использована шлицевая муфта, состоящая из полого вала 37 с пазом под шлиц и шлицевой вставки 39, выполненной с возможностью продольного перемещения вдоль паза.
Длина паза и шлица выбирались конструктивно в зависимости от рабочего хода вала привода 23, который зависит от максимального угла раскрытия инструмента, равного 38°. Рабочий ход составил 5 мм, то есть, L паза = L шлица + L раб. ход.
Полый вал 37 состыкован с направляющей 33 вала привода 23. Внутри полого вала 37 проходит вал направляющей 33, совершающий только возвратно-поступательное движение, который приводится в действие прямозубой парой А, и вал привода 23. К валу привода 23 приварена стыковой сваркой цапфа вала направляющей 33 с упорной втулкой 38 и вкладышем 42.
Упорная втулка 38 установлена между вкладышем 42 и валом привода 23 и приварена к валу привода 23. Вкладыш 42 обеспечивает взаимодействие шлицевой вставки 39 с цапфой вала направляющей 33. Упорная втулка 38 ограничивает осевое перемещение вкладыша 42, имеющего возможность вращения относительно оси вместе с приваренной к нему шлицевой вставкой 39. Шлицевая вставка 39 жестко связана с вкладышем 42, упорной втулкой 38 и валом привода 23.
Вращение концевого эффектора 4 с хирургическим инструментом осуществляется следующим образом. Ведомый вал 41 косозубой пары Б вращает полый вал 37 и через шлицы шлицевой вставки 39, приваренной к валу привода 23, передает крутящий момент валу привода 23 и по цепочке, соответственно, концевому эффектору.
Шлицевая муфта позволяет одновременно с вращением концевого эффектора с хирургическим инструментом относительно собственной оси подключать работу хирургического инструмента (смыкание или размыкание рабочих частей хирургического инструмента).
Таким образом, шлицевая муфта выполнена с возможностью разделения вала привода 23 на 1) невращающуюся часть, относящуюся к направляющей 33 вала привода, которая не имеет возможность вращения, а только совершает возвратно-поступательное движение для смыкания или размыкания рабочих частей хирургического инструмента 22, и 2) вращающуюся часть с возможностью одновременного возвратно-поступательного движения, обеспечивающую как вращение концевого эффектора, так и смыкание или размыкание рабочих частей хирургического инструмента.
В ходе проведения операции часто возникает необходимость одновременной работы, т.е. смыкание/размыкание и вращение концевого эффектора с хирургическим инструментом, например при наложении шва, где необходимо совершать круговые движение иглой и перемещаться по длине шва с определенным шагом. В этом случае приводятся в действие автономные шаговые двигатели цилиндрической пары А (возвратно-поступательное движение) и косозубой пары В (вращательное движение), индивидуальное управление которыми, производится хирургом с консоли модуля управления.
Таким образом, созданный привод хирургического эндоскопического устройства наиболее эффективный среди имеющихся аналогов и наиболее полно отвечает требованиями управления мехатронного хирургического комплекса.
Устройство выполнено с возможностью применения для роботизированного мехатронного хирургического комплекса. Это достигается тем, что привод имеет узел сопряжения, выполненный в виде шлицевых полумуфт 5 (фиг. 1), расположенных на верхней части корпуса 1 управления приводом устройства, которые входят в зацепление с ответными шлицевыми муфтами, расположенными на модуле управления, т.е. консоли хирургического комплекса, через которые хирург, с помощью джойстика, педалей и дисплея, путем изменения крутящих моментов на соответствующих полумуфтах, управляет работой шарнирного узла и концевого эффектора с хирургическим инструментом.
Роботизированная хирургия применяется прежде всего в области урологии, гинекологии, имплантологии и общей хирургии. И все эти операции характеризуются очень ограниченным хирургическим пространством, т.к. оперируемые органы не имеют прямого доступа, а находятся в плотном окружении других органов. Наибольшее количество операций проводится по следующим направлениям: радикальная простатэктомия, радикальная гистерэктомия и резекция толстой кишки.
Разработанный нами концевой эффектор эндоскопического хирургического аппарата с гибкой шарнирной секцией из звеньев и с механизмом управления, позволяющим сочетать и реализовать различные функциональные возможности позиционирования концевого эффектора, рассчитан на хирургические инструменты для проведения именно этих операций.
Приведенное описание примерного варианта осуществления дает общее представление о принципах конструирования, функционирования, изготовления и применения устройства, предлагаемого настоящим изобретением. По меньшей мере, один пример из данных вариантов осуществления проиллюстрирован прилагаемыми чертежами. Специалистам со средним уровнем компетентности в данной области техники очевидно, что конкретные устройства, описанные в настоящем документе и проиллюстрированные на прилагаемых чертежах, представляют собой неограничивающие примерные варианты осуществления и что объем настоящего изобретения определяется исключительно формулой изобретения. Признаки, проиллюстрированные или описанные в связи с одним примерным вариантом осуществления, можно объединять с признаками других вариантов осуществления. Предполагается, что такие модификации и изменения находятся в пределах объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| ВЫБОРКА ДАННЫХ, СОХРАНЯЕМЫХ В ПАМЯТИ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2009 |
|
RU2533842C2 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| ПЕРЕКЛЮЧАТЕЛЬ ПЕРЕДАЧИ ДЛЯ ХИРУРГИЧЕСКОГО ОТРЕЗНОГО И ФИКСИРУЮЩЕГО АППАРАТА С ПРИВОДОМ ОТ ДВИГАТЕЛЯ | 2007 |
|
RU2464945C2 |
| ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2534520C2 |
| МОТОРИЗОВАННЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2009 |
|
RU2532300C2 |
| ХИРУРГИЧЕСКИЙ ФИКСИРУЮЩИЙ И ОТРЕЗНОЙ АППАРАТ С ОДНИМ ТРОСОВЫМ ПРИВОДОМ | 2007 |
|
RU2445930C2 |
| ХИРУРГИЧЕСКИЙ АППАРАТ С ВОЗМОЖНОСТЬЮ ЗАПИСИ | 2007 |
|
RU2464944C2 |
| ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ АППАРАТ С РУКОЯТКОЙ, КОТОРАЯ СПОСОБНА К ШАРНИРНОМУ ПОВОРОТУ ОТНОСИТЕЛЬНО СТЕРЖНЯ | 2007 |
|
RU2460478C2 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2541829C1 |
Группа изобретений относится к медицинской технике, а именно к эндоскопическому хирургическому аппарату, способному манипулировать хирургическим инструментом в телероботизированной системе, и приводу указанного хирургического аппарата. Хирургическое эндоскопическое устройство содержит концевой эффектор, механизм управления концевым эффектором, привод и соединительный корпус. Концевой эффектор состоит из корпуса, в котором расположен толкатель, соединенный с хирургическим инструментом. Механизм управления концевым эффектором имеет гибкий вал, шарнирную секцию из звеньев и тросы. Привод имеет механизм управления тросами, узел привода гибкого вала, включающий вал привода, и узел сопряжения с роботизированным мехатронным хирургическим комплексом, расположенный на корпусе привода. При этом гибкий вал жестко соединен с одной стороны с валом привода, а с другой – с толкателем концевого эффектора. Звенья выполнены со стыковочными конгруэнтными полусферическими поверхностями с отверстием по центру для гибкого вала и отверстиями на периферии звеньев для тросов. Тросы связаны с одной стороны с механизмом управления тросами, а с другой – жестко закреплены на краевом звене шарнирной секции, закрепленном на корпусе концевого эффектора. При этом другое краевое звено шарнирной секции фиксировано на соединительном корпусе, внутри которого проходят гибкий вал, тросы и вал привода. Механизм управления тросами сообщает тяговое усилие по меньшей мере одному тросу, а узел привода гибкого вала сообщает посредством вала привода вращательное движение гибкому валу и/или возвратно-поступательное движение гибкому валу и толкателю. Привод вышеуказанного хирургического эндоскопического устройства содержит механизм управления тросами и узел гибкого вала. Узел привода гибкого вала имеет независимые механизмы, приводимые в движение электродвигателями и обеспечивающие смыкание или размыкание рабочих частей хирургического инструмента концевого эффектора и вращательное движение концевого эффектора с хирургическим инструментом соответственно, и устройство, обеспечивающее раздельную или одновременную работу обоих механизмов. Механизм управления тросами имеет блоки натяжения тросов для отклонения концевого эффектора, приводимые в движение электродвигателями. Первый блок механизма управления тросами содержит соединенные тросами роликовый барабан, в котором тросы уложены навстречу друг другу, и направляющие ролики. Второй блок механизма управления тросами содержит последовательно соединенные тросами направляющие ролики, распределительный ролик и роликовый барабан. При этом механизм, обеспечивающий смыкание или размыкание рабочих частей хирургического инструмента концевого эффектора, содержит цилиндрическую прямозубую зубчатую передачу в виде шестерни и колеса, причем колесо соединено с тягой направляющей вала привода, сопряженной с валом привода. Устройство, обеспечивающее раздельную или одновременную работу независимых механизмов, выполнено в виде шлицевой муфты, состоящей из полого вала с пазом под шлиц и шлицевой вставки, жестко связанной с вкладышем вала направляющей и валом привода. Механизм, обеспечивающий вращательное движение концевого эффектора с хирургическим инструментом, содержит одноступенчатую косозубую зубчатую передачу в виде ведущего колеса и ведомого колеса, установленного на полом валу. Использование группы изобретений позволит повысить точность позиционирования концевого эффектора хирургического эндоскопического устройства, применяемого в роботизированном хирургическом комплексе, в ограниченном операционном поле. 2 н. и 7 з.п. ф-лы, 5 ил.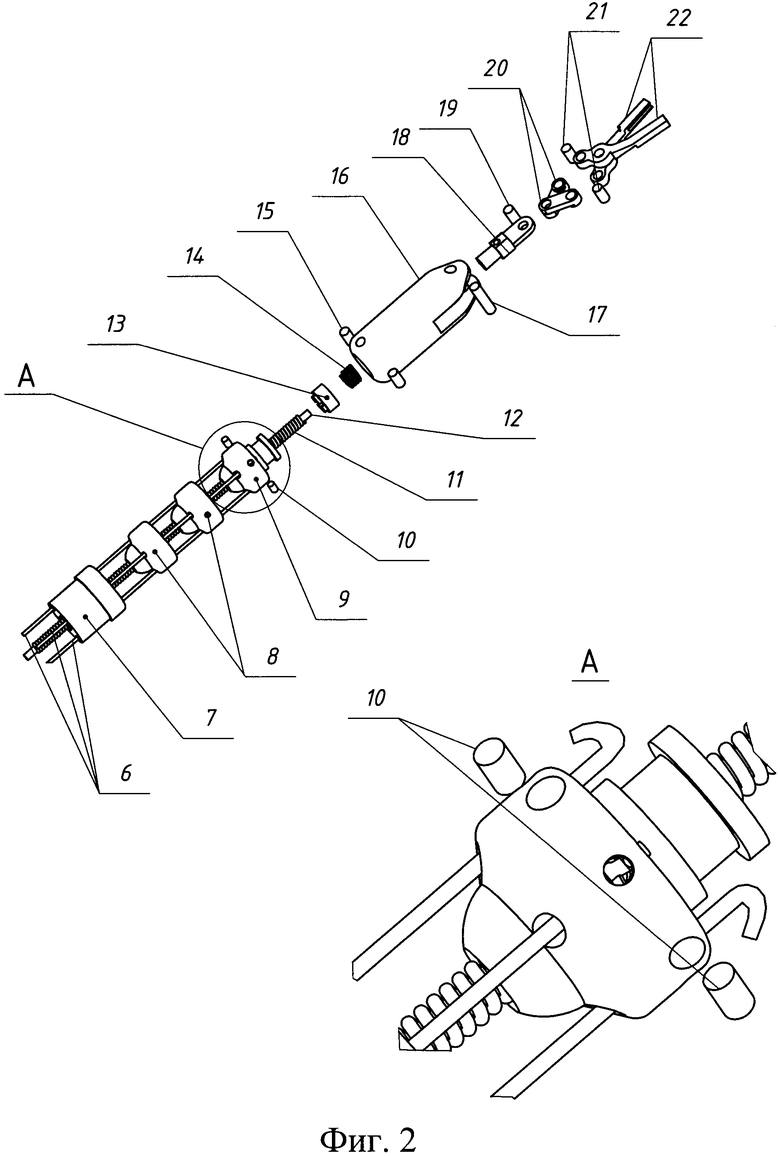
1. Хирургическое эндоскопическое устройство, содержащее:
- концевой эффектор, состоящий из корпуса, в котором расположен толкатель, соединенный с хирургическим инструментом,
- механизм управления концевым эффектором, который имеет гибкий вал, шарнирную секцию из звеньев и тросы,
- привод, который имеет
механизм управления тросами,
узел привода гибкого вала, включающий вал привода,
и узел сопряжения с роботизированным мехатронным хирургическим комплексом, расположенный на корпусе привода,
- соединительный корпус,
при этом
гибкий вал жестко соединен с одной стороны с валом привода, а с другой - с толкателем концевого эффектора,
звенья выполнены со стыковочными конгруэнтными полусферическими поверхностями с отверстием по центру для гибкого вала и отверстиями на периферии звеньев для тросов,
тросы связаны с одной стороны с механизмом управления тросами, а с другой - жестко закреплены на краевом звене шарнирной секции, закрепленном на корпусе концевого эффектора,
при этом другое краевое звено шарнирной секции фиксировано на соединительном корпусе, внутри которого проходят гибкий вал, тросы и вал привода,
механизм управления тросами сообщает тяговое усилие по меньшей мере одному тросу,
а узел привода гибкого вала сообщает посредством вала привода вращательное движение гибкому валу и/или возвратно-поступательное движение гибкому валу и толкателю.
2. Устройство по п. 1, отличающееся тем, что гибкий вал содержит сердечник с навитой пружиной.
3. Устройство по п. 1, отличающееся тем, что на краевом звене шарнирной секции выполнена кольцевая проточка, на которой с возможностью вращения вокруг своей оси располагается корпус концевого эффектора, при этом краевое звено зафиксировано на корпусе концевого эффектора фиксирующими штифтами.
4. Устройство по п. 1, отличающееся тем, что толкатель выполнен в виде ступенчатого цилиндра, расположен в отверстии корпуса концевого эффектора и подпружинен возвратной пружиной.
5. Устройство п. 4, отличающееся тем, что возвратная пружина установлена на нижней части толкателя меньшего диаметра в распор между гайкой регулировочной и толкателем концевого эффектора, при этом гайка регулировочная с наружной резьбой ввинчена в корпус концевого эффектора.
6. Устройство п. 1, отличающееся тем, что узел сопряжения выполнен в виде шлицевых полумуфт, расположенных на корпусе привода.
7. Привод хирургического эндоскопического устройства по любому из пп. 1-6, содержащий механизм управления тросами и узел привода гибкого вала,
при этом узел привода гибкого вала имеет независимые механизмы, приводимые в движение электродвигателями и обеспечивающие смыкание или размыкание рабочих частей хирургического инструмента концевого эффектора и вращательное движение концевого эффектора с хирургическим инструментом соответственно, и устройство, обеспечивающее раздельную или одновременную работу обоих механизмов,
а механизм управления тросами имеет блоки натяжения тросов для отклонения концевого эффектора, приводимые в движение электродвигателями;
при этом первый блок механизма управления тросами содержит соединенные тросами роликовый барабан, в котором тросы уложены навстречу друг другу, и направляющие ролики,
а второй блок механизма управления тросами содержит последовательно соединенные тросами направляющие ролики, распределительный ролик и роликовый барабан;
при этом механизм, обеспечивающий смыкание или размыкание рабочих частей хирургического инструмента концевого эффектора, содержит цилиндрическую прямозубую зубчатую передачу в виде шестерни и колеса, причем колесо соединено с тягой направляющей вала привода, сопряженной с валом привода;
устройство, обеспечивающее раздельную или одновременную работу независимых механизмов, выполнено в виде шлицевой муфты, состоящей из полого вала с пазом под шлиц и шлицевой вставки, жестко связанной с вкладышем вала направляющей и валом привода,
а механизм, обеспечивающий вращательное движение концевого эффектора с хирургическим инструментом, содержит одноступенчатую косозубую зубчатую передачу в виде ведущего колеса и ведомого колеса, установленного на полом валу.
8. Привод по п. 7, отличающийся тем, что на валу колеса цилиндрической прямозубой передачи установлена сошка, на осях которой закреплена тяга направляющей вала привода.
9. Привод по п. 8, отличающийся тем, что между вкладышем и валом привода установлена упорная втулка.
| US 2014058363 A1, 27.02.2014 | |||
| КОНЦЕВОЙ ЭФФЕКТОР ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2546957C1 |
| 0 |
|
SU161078A1 | |
| МОТОРИЗОВАННЫЙ ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СКРЕПЛЯЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ УСТРОЙСТВО ОГРАНИЧЕНИЯ КРУТЯЩЕГО МОМЕНТА ЦЕПИ ЭЛЕКТРОМАГНИТНОГО ПРИВОДА | 2009 |
|
RU2492821C2 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2541829C1 |
| US 2010011900 A1, 21.01.2010 | |||
| US 2014214049 A1, 31.07.2014. | |||

