Область применения
Настоящее изобретение относится к ключам с регулируемым крутящим моментом для трубных элементов на нефтяном месторождении, иногда называемым силовыми захватами или шейками для жесткого механического захвата. Эти устройства используют при выполнении манипуляций по свинчиванию или развинчиванию таких трубных элементов буровых скважин, как бурильные трубы, стабилизаторы и буровые долота.
Предпосылки к созданию изобретения
При выполнении операций по бурению и спуску трубных элементов на нефтяном месторождении, когда свинчивают или развинчивают соединения буровых труб, воротники буров, обсадные трубы или подобные элементы, применяют различные типы ключей с регулируемым крутящим моментом. Обычно эти ключи, которые иногда также называют силовыми захватами или шейками для жесткого механического захватывания, включают в себя верхние и нижние захваты, которые последовательно захватывают и освобождают верхние и нижние соединения буровых труб, при этом верхние и нижние захваты перемещаются способом поворота или движения по типу ножниц для свинчивания или развинчивания по резьбе соединения между стыками буровых труб. Для этой цели используют захваты с механическим приводом.
В некоторых ключах с регулируемым крутящим моментом верхний захват и нижний захват поворачивают по отношению друг к другу посредством цилиндра, создающего крутящий момент, который может быть выдвинут или отведен для требуемого свинчивания или развинчивания буровых труб. Система для захватывания или зацепления труб на каждом захвате использует подвижные головки, которые включают в себя сухари для захвата труб. Головки могут быть подвижны с помощью различных средств, включающих в себя, например, гидравлические плунжеры, выдвигаемые для перемещения головок в зацепление с трубой, обеспечивающее ее захватывание или зажатие.
Краткое изложение существа изобретения
Согласно аспекту настоящего изобретения создан применяемый к трубным элементам на нефтяном месторождении ключ с регулируемым крутящим моментом, содержащий нижний захват, имеющий углубление для размещения трубных элементов на нефтяном месторождении, расположенных вдоль оси, проходящей через углубление, верхний захват, имеющий углубление и установленный над нижним захватом таким образом, что углубление верхнего захвата расположено над углублением нижнего захвата так, что через них будет проходить ось, сухари для захватывания трубы, расположенные в углублениях верхнего захвата и нижнего захвата и способные приводиться в действие между выдвинутым положением и отведенным положением, поворотный подшипник, расположенный между верхним захватом и нижним захватом и обеспечивающий возможность поворота верхнего захвата и нижнего захвата относительно друг друга, при этом углубления остаются расположенными таким образом, что через них проходит ось, систему приведения в действие, подсоединенную между верхним захватом и нижним захватом и способную создавать вектор силы для приведения в действие верхнего захвата и нижнего захвата с целью поворота на поворотном подшипнике, по меньшей мере систему для измерения фактического радиуса, измеряемого перпендикулярно вектору силы и между вектором силы и осью, или систему для измерения фактического вектора силы, создаваемого системой приведения в действие.
Согласно еще одному аспекту настоящего изобретения создан способ измерения крутящего момента, прилагаемого ключом с регулируемым крутящим моментом к трубным элементам на нефтяном месторождении, при этом ключ приводится в действие для приложения крутящего момента к трубному элементу вокруг оси вращения и содержит нижний захват, имеющий углубление, через которое в течение выполнения операции проходит ось, верхний захват, имеющий углубление и установленный над нижним захватом таким образом, что углубление верхнего захвата расположено над углублением нижнего захвата так, что через них будет проходить ось вращения, сухари для захвата трубы, расположенные в углублениях верхнего захвата и нижнего захвата, поворотный подшипник, расположенный между верхним захватом и нижним захватом и обеспечивающий возможность поворота верхнего захвата и нижнего захвата относительно друг друга, при этом углубления остаются расположенными таким образом, что через них проходит ось вращения, систему приведения в действие, подсоединенную между верхним захватом и нижним захватом и способную создавать вектор силы для приведения в действие верхнего захвата и нижнего захвата с целью их поворота на поворотном подшипнике, причем способ содержит определение, по меньшей мере, фактического радиуса, измеренного перпендикулярно вектору силы и между вектором силы и осью вращения трубного элемента, или фактической силы, прилагаемой для воздействия крутящего момента на соединение, и вычисление крутящего момента на основе, по меньшей мере, одного измерения.
Следует иметь в виду, что другие аспекты настоящего изобретения будут вполне очевидны квалифицированным специалистам в этой области из последующего подробного описания, в котором различные варианты осуществления изобретения показаны и охарактеризованы посредством их иллюстрации. Понятно, что изобретение допускает выполнение других различных вариантов его осуществления, а некоторые его детали допускают их модификацию в различных иных отношениях в объеме настоящего изобретения. Соответственно чертежи и подробное описание следует считать носящими иллюстративный, но не ограничительный характер.
Краткое описание чертежей
На чертежах одинаковые позиции обозначают подобные детали, на них некоторые аспекты настоящего изобретения подробно представлены посредством примера, но не для наложения ограничений, при этом на чертежах показано следующее:
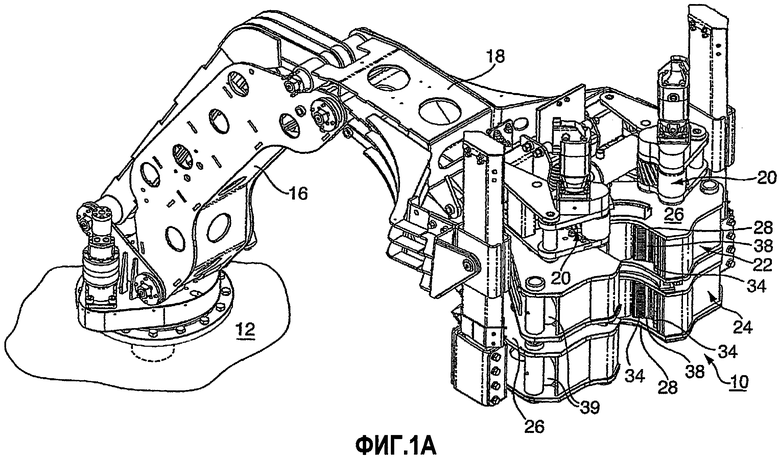
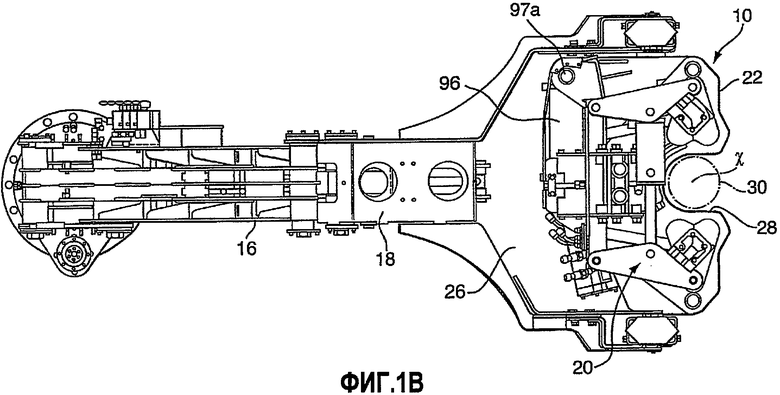
фигуры 1А и 1В представляют виды соответственно в перспективе и в плане сверху ключа с регулируемым крутящим моментом, установленного на монтажной конструкции;
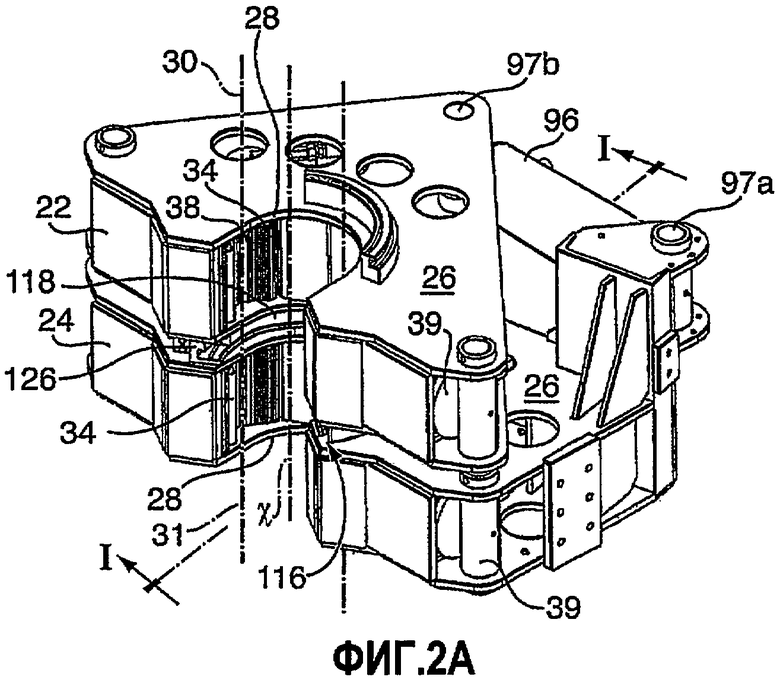
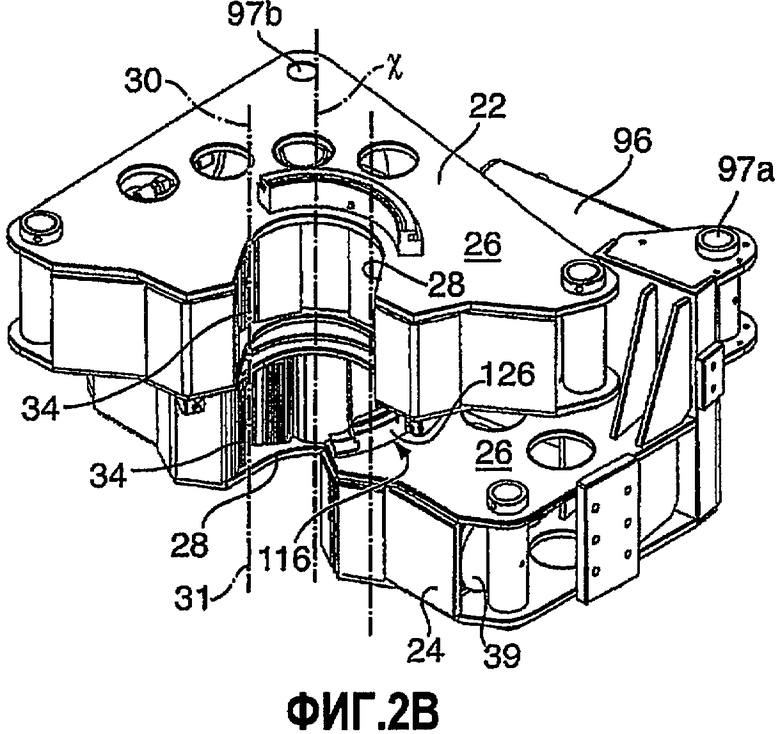
фигуры 2А и 2В представляют виды в перспективе ключа с регулируемым крутящим моментом согласно одному из вариантов осуществления изобретения, причем на фигуре 2А захваты этого ключа показаны в нейтральном положении, а на фигуре 2В - в начальном положении соединения для передачи (создания) крутящего момента;
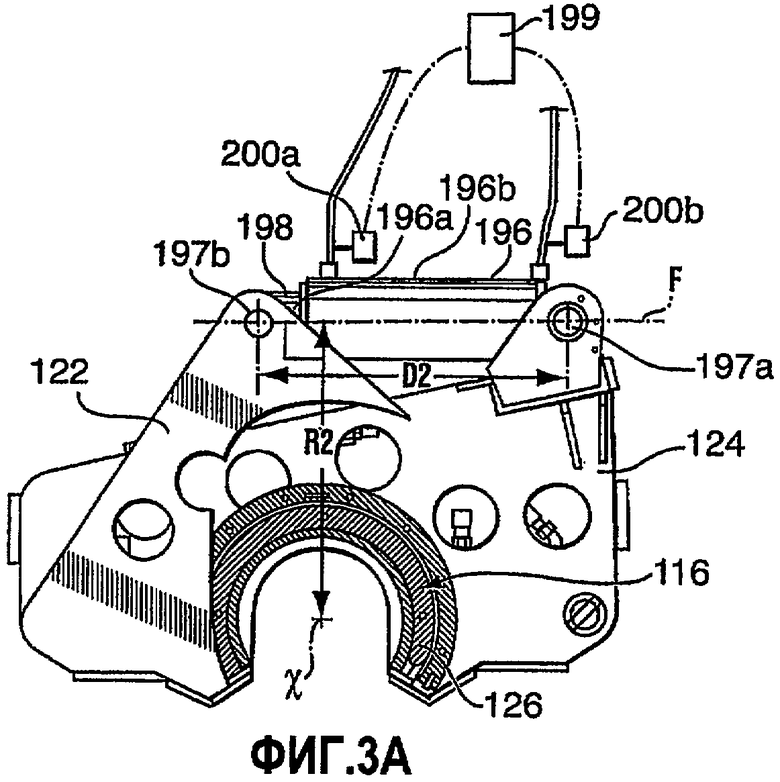
фигуры 3А и 3В представляют схематические виды линейной системы приведения в действие, которая может быть использована в настоящем изобретении, при этом на фигуре 3А показаны захваты ключа с регулируемым крутящим моментом в нейтральном положении, а на фигуре 3В захваты такого ключа показаны в начальном положении для передачи крутящего момента.
Подробное описание различных вариантов конструкции
Подробное описание, которое приведено ниже, совместно с прилагаемыми чертежами предназначено для характеристики различных вариантов осуществления настоящего изобретения, но не предназначено для представления только тех вариантов, которые проработаны изобретателем. Подробное описание включает в себя конкретные детали с целью обеспечения полного понимания настоящего изобретения. Однако квалифицированным специалистам в этой области понятно, что настоящее изобретение может быть осуществлено на практике без этих конкретных деталей.
Настоящее изобретение, в общем, относится к захватам ключа с регулируемым крутящим моментом для буровых труб, используемым для свинчивания или развинчивания трубных элементов на нефтяном месторождении, при этом они включают в себя сухари для захватывания труб, спуск или подъем которых должен быть осуществлен.
Для облегчения понимания устройства ключей с регулируемым крутящим моментом, предназначенным для буровых труб, следует заметить, что такие устройства часто включают в себя гидравлические или пневматические силовые верхний и нижний захваты, которые подсоединены с возможностью поворота для выполнения движения по типу движения ножниц. Каждый из захватов включает в себя сухари, которые действуют для зацепления или захватывания трубы, спуск или подъем которой должен быть осуществлен.
На фигурах 1А-2В представлен один из вариантов осуществления ключа 10 с силовым приводом и регулируемым крутящим моментом, предназначенного для буровых труб и выполненного согласно настоящему изобретению. Ключ 10 показан связанным с полом 12 буровой установки опорным элементом, в этом варианте конструкции включающем в себя плечо 16, которое содержит проходящий вбок опорный элемент 18 для ключа. Ключ связан с вращательным устройством 20, которое расположено над ключом для вращения трубы. Хотя изобретение описано далее как использующее силовые цилиндры с гидравлическим приводом и их гидравлическую цепь, для квалифицированных специалистов в этой области будет вполне очевидно и понятно, что любой или все из силовых цилиндров этого изобретения, как вариант, могут быть пневматическими, и совместно с ними может быть использована обычная пневматическая цепь. Как вариант, могут быть использованы винтовые или другие приводы.
Ключи 10 включают в себя верхний захват 22 и нижний захват 24, каждый из которых может быть фактически идентичен другому захвату и каждый из которых включает в себя горизонтально расположенный корпус 26 с углублением 28 у его края для захождения используемых на нефтяном месторождении трубных элементов, спуск или подъем которых должен быть осуществлен, включая, например, соединения буровой трубы, воротники бура, обсадные трубы, обсадные хвостовики, головки бура и что-то подобное.
При выполнении операции верхний захват 22 может воздействовать на верхний трубный элемент 30, а нижний захват 24 может воздействовать на нижний трубный элемент 31. Для облегчения выполнения иллюстрации трубные детали 30, 31 показаны линиями воображаемого контура. При захватывании верхним захватом 22 верхнего трубного элемента и захватывании нижним захватом нижнего трубного элемента захваты 22 и 24 могут быть повернуты относительно друг друга, при этом часто один из захватов удерживают в неподвижном состоянии, в то время как другой захват поворачивают относительно него, чтобы таким образом свинчивать или развинчивать резьбовое соединение между трубными элементами. Углубления 28 формируют таким образом, чтобы трубные элементы 30, 31 проходили через это углубление, в общем, вдоль оси х и в течение поворота захватов углубления оставались бы расположенными друг над другом.
Каждый захват включает в себя множество сухарей 34 для захватывания труб, удерживаемых посредством корпуса 26 в углублении 28. Сухари включают в себя смонтированные на них зубцы для захватывания труб. В представленном варианте осуществления конструкции сухари 34 установлены на головки 38, которые подвижны, например, посредством гидравлических 39, пневматических, винтовых приводов и т.д. к оси х или от нее. Так, сухари 34 по желанию могут быть выдвинуты в положение захватывания в углубление 28 или отведены из положения захватывания. В представленном варианте осуществления конструкции головки сухарей расположены в углублении 28, чтобы действовать фактически диаметрально противоположно друг другу для захватывания между ними трубного элемента.
Каждая головка 38 сухаря может иметь расположенную под углом или криволинейную поверхность, на которой на расстоянии друг от друга установлены сухари 34, причем таким образом, что сухари расположены вдоль дугообразного пути, чтобы, в общем, следовать по наружной поверхности захватываемого трубного элемента 30, при этом наружная поверхность, безусловно, также в общем является дугообразной. Угловое расположение сухарей 34 на расстоянии друг от друга обеспечивает возможность их введения в зацепление в отстоящих друг от друга местах по окружности трубного элемента.
Верхний захват 22 может поворачиваться относительно нижнего захвата 24 для перемещения захватов из нейтрального положения, показанного на фигурах 1 и 2А, в одно из положений для воздействия крутящего момента с целью свинчивания трубных элементов или их развинчивания. Исходное положение для приложения крутящего момента с целью свинчивания трубных элементов представлено на фигуре 2В. Для возможности выполнения поворотного действия отводимая и выдвигаемая линейная система приведения в действие с возможностью поворота может быть подсоединена между верхним захватом и нижним захватом. В представленном варианте осуществления конструкции линейная система приведения в действие включает в себя гидравлический узел 96, состоящий из поршня двойного действия и цилиндра и установленный вблизи от конца корпусов 26 захватов, удаленного от головок 38 сухарей. Цилиндр в сборе 96 присоединен его первым концом к нижнему захвату 24 через шарнирный палец 97а и подшипниковый узел и его противоположным концом - к верхнему захвату 22 через шарнирный палец 97b и подшипниковый узел. Узел 96, состоящий из поршня и цилиндра, соединяет друг с другом верхний и нижний захваты 22 и 24 таким образом, что посредством выдвижения и отведения создающего крутящий момент узла 96, в зависимости от времени для выдвижения и отведения головок с сухарями, верхний и нижний трубные элементы 30 и 31 могут быть захвачены и подвергнуты действию крутящего момента для свинчивания или развинчивания резьбового соединения между ними.
Выдвижение и отведение узла 96 приведет к тому, что верхний и нижний захваты 22 и 24 будут перемещаться к положению приложения крутящего момента и от этого положения, показанного на фигуре 2В, и к нейтральному положению или через нейтральное положение, показанное на фигуре 2А. То есть в том случае, когда верхний захват 22 сцентрирован с нижним захватом 24 либо когда верхний захват 22 перемещен в угловое положение по отношению к нижнему захвату 24, которое представляет собой положение приложения крутящего момента, показанное на фигуре 2В, захваты 22 и 24 будут перемещены путем их поворота, а после захватывания верхнего трубного элемента и нижнего трубного элемента посредством использования сухарей трубные элементы могут быть повернуты по отношению друг к другу.
Верхний и нижний захваты 22 и 24 могут быть соединены с возможностью поворота посредством поворотного подшипника. В одном из вариантов осуществления конструкции поворотный подшипник, например, включает в себя узел 116 подшипникового кольца. Узел 116 может включать в себя первое частичное кольцо 118 и второе частичное кольцо 126, отстоящие в наружном направлении от углубления 28, так что не будут возникать помехи перемещению трубных элементов через захваты. В этом представленном варианте осуществления конструкции первое частичное кольцо 118 прикреплено к корпусу 26 верхнего захвата, а второе частичное кольцо 126 прикреплено к нижнему захвату 24. Кольца 118 и 126 сблокированы друг с другом у их поверхностей раздела для создания поворотного подшипника, на котором верхний захват и нижний захват могут поворачиваться относительно друг друга. Поверхности раздела между кольцами воспринимают силы между захватами и с возможностью поворота ориентируют верхний и нижний захваты 22 и 24 таким образом, что они будут поворачиваться вокруг оси х в течение их относительного поворотного движения.
Когда захваты соответствующим образом сцентрированы с трубными элементами 30, 31, используемыми на нефтяном месторождении, спуск или подъем которых должен быть осуществлен, резьбовое соединение между ними будет расположено между сухарями 34 верхнего захвата 22 и сухарями 34 нижнего захвата, при этом трубные элементы будут проходить, в общем, вдоль оси х. В этом положении головки 38 сухарей нижнего захвата 24 могут быть приведены в действие для захвата между ними нижнего трубного элемента 31. Далее, в зависимости от того, осуществляют ли свинчивание резьбового соединения или его развинчивание, узел 96, состоящий из поршня и цилиндра и служащий для приложения крутящего момента, выдвигают или отводят. В течение выдвижения или отведения цилиндра головки 38 сухарей на верхнем захвате 22 будут находиться в их отведенных положениях таким образом, что верхний захват 22 может поворачиваться по отношению к верхнему трубному элементу 30. Следовательно, в случае освобожденного верхнего захвата 22 и выдвинутого или отведенного в начальное положение узла 96 в зависимости от того, будет ли происходить свинчивание трубы или ее отвинчивание, верхний захват 22 далее может быть приведен в обеспечивающее захватывание зацепление с верхним трубным элементом 30 посредством выдвижения головок для расположения несомых на них сухарей с целью захватывания трубного элемента. После того как это произошло, верхний трубный элемент 30 и нижний трубный элемент 31 будут надежно захвачены соответствующими захватами. Узел 96 может быть приведен в действие для перемещения верхнего и нижнего захватов 22 и 24 посредством их поворота или шарнирного смещения относительно друг друга, прилагая при этом крутящий момент к соединениям 30 и 31 буровых труб по часовой стрелке либо против часовой стрелки в зависимости от того, должно ли происходить свинчивание по резьбовому соединению между трубными элементами или развинчивание этого соединения.
При выполнении спуска или подъема трубных элементов на нефтяном месторождении может оказаться желательным определение крутящего момента, прилагаемого в течение свинчивания или развинчивания. Хотя в некоторых ситуациях может быть приемлемо грубое вычисление крутящего момента, в иных ситуациях может оказаться необходимым или желательным определение фактического прилагаемого крутящего момента. В ключе с регулируемым крутящим моментом такого типа, который описан выше, крутящий момент прилагают под действием линейного привода между верхним и нижним захватами. Крутящий момент вычисляют как произведение вектора силы и радиуса, который представляет собой расстояние от места приложения силы до образуемой оси вращения. При этом в одном из вариантов осуществления конструкции, если обратиться к фигурам 3А и 3В, крутящий момент, прилагаемый ключом с регулируемым крутящим моментом, может быть вычислен посредством первоначального определения одного или обоих из фактического радиуса, измеряемого перпендикулярно вектору силы, который в показанном варианте осуществления конструкции представляет собой ось F линейного привода, и между осью F линейного привода, создающего силу, и осью х, которая представляет собой центр вращения трубного элемента, либо фактической силы, прилагаемой для воздействия крутящего момента на соединение с учетом динамических условий работы, которые, например, в представленном случае могут быть созданы посредством линейного привода. Такие измерения могут быть выполнены в один или несколько выбранных моментов времени в течение работы ключа с регулируемым крутящим моментом. В одном из вариантов осуществления конструкции система контроля ключа с регулируемым крутящим моментом/управления этим ключом может повторяемым образом выполнять замер каждого или обоих из фактического радиуса или фактической силы в течение выполнения работы так, чтобы такие измерения могли быть использованы для определения крутящего момента. Повторяемые замеры могут быть выполнены за секунды или, возможно, за миллисекунды, или более часто, если такое непрерывное измерение представляет интерес. Система контроля/управления может принимать и обрабатывать измерения и на основании этого управлять работой ключа с регулируемым крутящим моментом.
В представленном варианте осуществления конструкции линейный привод показан в виде цилиндра 196, соединенного с нижним захватом 124 посредством поворотного соединения 197а и подсоединенного к верхнему захвату посредством поворотного соединения 197b. Чтобы определить фактический радиус, перпендикулярный от вектора силы, оси F привода, к оси х, следует учитывать тот факт, что радиус изменяется, когда цилиндр совершает рабочий ход для выдвижения и отведения. Например, в представленном варианте осуществления конструкции радиус R1 между осью F привода и осью х в исходном положении для свинчивания соединения согласно фигуре 3В будет меньше, чем радиус R2 между осью F привода и осью х, когда верхний захват и нижний захват находятся в нейтральном положении, показанном на фигуре 3А. Для определения фактического радиуса между осью F привода и осью х могут быть использованы различные устройства и процессы, которые могут включать в себя фактическое измерение радиуса посредством выяснения положения центра скважины, а также датчик для определения положения вектора силы. Как вариант, фактический радиус может быть получен посредством других параметров ключа. Радиус между осью F привода и осью х изменяется в зависимости от длины хода цилиндра. В частности, когда шток 196а цилиндра выдвигают или отводят относительно корпуса 196b поршня цилиндра, цилиндр поворачивается вокруг его шарнирных мест 197а, 197b крепления соответственно к верхнему захвату и к нижнему захвату, и это вызывает перемещение оси привода цилиндра относительно оси х. Таким образом, когда цилиндр выполняет рабочий ход, расстояние от оси F цилиндра до центра трубного элемента, оси х, также изменяется. Если желательно определить фактический радиус, то в течение выполнения работы желательно выполнить измерения радиуса, которые находятся в определенной связи с различными или всеми положениями хода цилиндра 196 ключа с регулируемым крутящим моментом. После этого может быть проконтролирована длина цилиндра, чтобы тем самым определить фактический радиус. Длина хода цилиндра может быть определена один раз или непрерывно в течение выполнения работы посредством использования каких-либо различных устройств 198 для измерения длины хода, например таких, которые обеспечивают возможность измерения в реальном времени, например, посредством использования линейного преобразователя, магнитострикционного датчика, переменного магнитного сопротивления, либо лазерного устройства или устройства для измерения звуковой волны, предназначенного для цилиндра. Как только выполнены измерения корреляционной длины хода и радиуса для конфигурации/геометрии ключа с регулируемым крутящим моментом, они не должны изменяться в течение выполнения операции. Такие измерения можно хранить в автоматизированной системе для использования при измерениях крутящего момента. Например, в одном из вариантов осуществления конструкции может быть составлено уравнение, связывающее длину хода с фактическим радиусом. В любое конкретное время или фактически непрерывно, когда определение крутящего момента представляет интерес, фактическая длина привода может быть определена и использована совместно с силой для вычисления крутящего момента.
Фактическая сила может быть определена, например, посредством рассмотрения разложения на множители динамических параметров при операции воздействия крутящего момента, включая, например, сопротивление противодавления и т.д. При определении фактической силы, прилагаемой линейным приводом, совместно с цилиндром могут быть использованы различные системы 199 для определения силы. В одном из вариантов осуществления конструкции система для определения силы, включающая в себя, по меньшей мере, один датчик давления, которая учитывает одно или несколько из противодавления и падения давления в гидравлической системе, может быть использована для измерения силы на непрерывной основе. В одном из вариантов осуществления конструкции, например, может быть использована система, которая измеряет разность давления на поршне и, следовательно, прилагаемую силу, причем она может включать в себя, например, датчик 200а давления, установленный вблизи от цилиндра с сообщением с гидравлической линией со стороны штоковой полости для восприятия давления, и датчик 200b давления, установленный на гидравлической линии со стороны поршневой полости. Еще в одном варианте осуществления конструкции может быть применена система для измерения деформации цилиндра, например, включающая в себя тензометрический датчик 197с, установленный на шарнирном соединении 197а или 197b, который может, например, измерять силу на основе отклонения. Еще в одном варианте осуществления конструкции может быть использован преобразователь давления типа динамометрического датчика, рядом с которым расположен цилиндр для выполнения работы. Силу можно непрерывно измерять в реальном времени, либо в один или более выбранные моменты времени, когда это желательно в течение выполнения операции с приложением крутящего момента, и такое измерение может быть использовано для вычисления крутящего момента.
Вычисление крутящего момента на основе одного или обоих из фактического радиуса и фактической силы может улучшить выполнение операций по свинчиванию или развинчиванию соединения и может быть использовано при регистрации операционных данных и контроле системы. Безусловно, для обеспечения точности может быть использовано вычисление крутящего момента на основе как фактического радиуса, так и фактической силы в определенное время в течение выполнения операции с воздействием крутящего момента.
Поскольку фактический крутящий момент, в общем, представляет интерес в отношении его величины, прилагаемой ключом к соединению труб, которое подвергают воздействию крутящего момента, может представлять интерес вычисление исходного крутящего момента, требуемого для работы ключа, например крутящего момента, требуемого для приведения в действие верхнего захвата и нижнего захвата для их поворота относительно друг друга, например, посредством узла 116 подшипникового кольца. Если измерено трение в узле 116, то требование в отношении крутящего момента на создаваемое трение может быть исключено из окончательного вычисления крутящего момента. Как вариант, либо в дополнение к указанному, в качестве подшипникового кольца в сборе желательно выбрать устройство с низким трением, чтобы по возможности уменьшить крутящий момент, требуемый для обеспечения поворота верхнего захвата относительно нижнего захвата.
Предыдущее описание раскрытых вариантов осуществления конструкции приведено для возможности изготовления или использования настоящего изобретения квалифицированными специалистами в этой области. Различные модификации этих вариантов конструкции будут вполне понятны квалифицированным специалистам в этой области, а основные принципы, которые здесь определены, могут быть применены к другим вариантам конструкции без отклонения от существа или объема изобретения. Таким образом, настоящее изобретение не предназначено для ограничения представленных здесь вариантов конструкции, а должно соответствовать полному объему согласующихся с ним пунктов формулы изобретения, при этом ссылка на элемент в единственном числе, например, посредством использования артикля «а» или «an», означает не «единственный и неповторимый», если это специально не указано, а «один или более». Все конструктивные и функциональные эквиваленты элементов различных вариантов осуществления конструкции, раскрытых по ходу описания, которые известны или в дальнейшем становятся известны квалифицированным специалистам в этой области, предназначены для их охватывания элементами пунктов формулы изобретения. Кроме того, ничто из раскрытого здесь не предназначено для того, чтобы оно стало всеобщим достоянием, невзирая на то, имеется ли однозначное изложение такого раскрытия в пунктах формулы изобретения. Элемент формулы изобретения не должен быть истолкован согласно положениям 35 Свода законов США, 112, шестой параграф, если элемент не будет четко определен с использованием фразы «средство для» или «стадия для».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВА И СПОСОБ ДЛЯ СОЕДИНЕНИЯ ИЛИ ОТСОЕДИНЕНИЯ ТРУБНЫХ ЭЛЕМЕНТОВ В ТРУБНОЙ КОЛОННЕ ДЛЯ НЕФТЯНОГО МЕСТОРОЖДЕНИЯ | 2006 |
|
RU2417873C2 |
| КЛЮЧ ТРУБНЫЙ ГИДРАВЛИЧЕСКИЙ | 1999 |
|
RU2164464C2 |
| АВТОМАТИЧЕСКИ РЕГУЛИРУЕМАЯ ПРИВОДНАЯ ЧЕЛЮСТЬ ТРУБНОГО КЛЮЧА | 2009 |
|
RU2525241C2 |
| АВТОМАТИЧЕСКИЙ СТАЦИОНАРНЫЙ БУРОВОЙ КЛЮЧ | 1998 |
|
RU2143051C1 |
| ТРУБНЫЙ КЛЮЧ | 2010 |
|
RU2479412C2 |
| УСТРОЙСТВО ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВ В КОЛОННАХ БУРИЛЬНЫХ ТРУБ (ВАРИАНТЫ) | 1994 |
|
RU2096582C1 |
| СТАЦИОНАРНЫЙ БУРОВОЙ КЛЮЧ | 1989 |
|
SU1834351A1 |
| КЛЮЧ БУРОВОЙ СТАЦИОНАРНЫЙ | 2007 |
|
RU2353749C2 |
| Способ определения рациональных параметров трубных ключей | 1990 |
|
SU1789650A1 |
| СПОСОБ СВИНЧИВАНИЯ ИЛИ РАЗВИНЧИВАНИЯ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2273716C2 |

Предложенная группа изобретений относится к механизированному инструменту для сборки и разборки резьбовых соединений труб, в частности к буровым ключам с регулируемым крутящим моментом. Техническим результатом является повышение эффективности работы бурового ключа. Ключ с регулируемым крутящим моментом для трубных элементов содержит нижний и верхний захваты, поворотный подшипник, расположенный между захватами, систему приведения в действие, подсоединенную между захватами, и систему для измерения фактического радиуса или систему для измерения вектора фактической силы, создаваемой системой приведения в действие. При этом поворотный подшипник обеспечивает возможность поворота верхнего и нижнего захвата относительно друг друга посредством системы привидения в действие. Способ измерения крутящего момента при приведении ключа в действие включает выполнение измерения фактического радиуса, измеряемого перпендикулярно вектору силы и между вектором силы и осью вращения трубного элемента, или измерения фактической силы, которую прилагают для воздействия крутящего момента на соединение, и вычисление крутящего момента на основе, по меньшей мере, одного измерения. 3 н. и 9 з.п. ф-лы, 6 ил.
1. Ключ с регулируемым крутящим моментом для трубных элементов на нефтяном месторождении, содержащий нижний захват, имеющий углубление для размещения трубного элемента, расположенного вдоль оси, проходящей через углубление, верхний захват, имеющий углубление и установленный над нижним захватом таким образом, что углубление верхнего захвата будет расположено над углублением нижнего захвата, и через них проходит ось, предназначенные для захвата трубы сухари, расположенные в углублениях верхнего захвата и нижнего захвата, способные приводиться в движение между выдвинутым положением и отведенным положением, поворотный подшипник, расположенный между верхним захватом и нижним захватом, обеспечивающий возможность поворота верхнего захвата и нижнего захвата относительно друг друга, при этом углубления остаются расположенными так, что через них проходит ось, систему приведения в действие, подсоединенную между верхним захватом и нижним захватом и способную создавать вектор силы для приведения в движение верхнего захвата и нижнего захвата с целью их поворота на поворотном подшипнике, по меньшей мере, систему для измерения фактического радиуса, измеряемого перпендикулярно вектору силы и между вектором силы и осью, или систему для измерения вектора фактической силы, создаваемой системой приведения в действие.
2. Ключ по п.1, в котором система приведения в действие содержит линейную систему, а система для измерения фактического радиуса включает в себя устройство для измерения длины линейного привода между верхним захватом и нижним захватом при действии ключа, при этом система приведения в действие содержит гидравлическую приводную систему, включающую в себя гидравлический цилиндр с поршнем, и систему для измерения сомножителей фактической силы в противодавлении гидравлической системы приведения в действие, или система приведения в действие содержит гидравлическую приводную систему, включающую в себя гидравлический цилиндр с поршнем, и систему для измерения сомножителей фактической силы в падении давления гидравлической приводной системы в течение выполнения операции, или система приведения в действие содержит линейную приводную систему, включающую в себя гидравлический цилиндр с поршнем, а система для измерения фактической силы включает в себя систему для измерения перепада гидравлического давления по поршню.
3. Ключ по п.1 или 2, в котором система для измерения фактической силы включает в себя тензометрический датчик, связанный с системой приведения в действие.
4. Ключ по п.1 или 2, содержащий систему для измерения фактического радиуса и систему для измерения вектора фактической силы.
5. Способ измерения крутящего момента, прилагаемого ключом с регулируемым крутящим моментом к трубным элементам на нефтяном месторождении, при приведении в действие ключа для воздействия крутящего момента на трубный элемент вокруг оси вращения, при этом ключ содержит нижний захват, имеющий углубление, через которое в процессе выполнения операции проходит ось вращения, верхний захват, имеющий углубление и установленный над нижним захватом так, что углубление верхнего захвата расположено над углублением нижнего захвата таким образом, что через них будет проходить ось вращения, сухари для захвата трубы, расположенные в углублениях верхнего захвата и нижнего захвата, поворотный подшипник, расположенный между верхним захватом и нижним захватом и обеспечивающий возможность поворота верхнего захвата и нижнего захвата относительно друг друга, причем углубления остаются расположенными так, что через них проходит ось вращения, систему приведения в действие, подсоединенную между верхним захватом и нижним захватом и способную создавать вектор силы для приведения в движение верхнего захвата и нижнего захвата с целью поворота на поворотном подшипнике, при этом способ содержит выполнение, по меньшей мере, измерения фактического радиуса, измеряемого перпендикулярно вектору силы и между вектором силы и осью вращения трубного элемента, или измерения фактической силы, прилагаемой для воздействия крутящего момента на соединение, и вычисление крутящего момента на основе, по меньшей мере, одного измерения.
6. Способ по п.5, в котором выполняют измерение фактического радиуса посредством получения данных, устанавливающих связь длины линейного привода с измерениями радиуса, выполняют измерение фактической длины линейного привода в течение действия ключа с регулируемым крутящим моментом, используют фактическую длину линейного привода для экстраполяции измерения фактического радиуса, исходя из данных, при этом стадия вычисления прилагаемого крутящего момента основана на измерении радиуса.
7. Способ по п.5 или 6, в котором система приведения в действие содержит гидравлическую приводную систему, включающую в себя гидравлический цилиндр с поршнем, и осуществляют стадию измерения сомножителей фактической силы в противодавлении гидравлической приводной системы, или система приведения в действие содержит гидравлическую приводную систему, включающую в себя гидравлический цилиндр с поршнем, и осуществляют стадию измерения сомножителей фактической силы в падении давления гидравлической приводной системы в течение выполнения работы, или система приведения в действие содержит линейную приводную систему, включающую в себя гидравлический цилиндр с поршнем, а стадия измерения фактической силы включает в себя измерение разности гидравлического давления по поршню.
8. Способ по п.5 или 6, в котором стадией измерения фактической силы управляет тензометрический датчик, связанный с системой приведения в действие.
9. Способ по п.5 или 6, содержащий определение фактического радиуса и фактического крутящего момента.
10. Способ по п.5 или 6, который дополнительно содержит определение требуемого крутящего момента на создаваемое трение поворотного подшипника и исключение требуемого крутящего момента на создаваемое трение из вычисленного крутящего момента.
11. Способ по п.5 или 6, который дополнительно содержит управление действием ключа с регулируемым крутящим моментом на основе вычисленного крутящего момента.
12. Способ измерения крутящего момента, прилагаемого ключом с регулируемым крутящим моментом к трубным элементам на нефтяном месторождении, имеющим верхнюю и нижнюю шарнирные зоны, при этом способ содержит следующие стадии: обеспечение связи верхней и нижней шарнирных зон вокруг опорной зоны, расположенной между ними таким образом, что верхняя и нижняя шарнирные зоны поворачиваются относительно друг друга, при этом захватывающая часть в каждой шарнирной зоне окружает ось вращения трубного элемента, проходящего через нее, и приспособлена для соединения с трубным элементом; создание вектора силы для приведения в движение верхней и нижней шарнирных зон, для осуществления поворота вокруг опорной зоны; выполнение, по меньшей мере, измерения фактического радиуса, измеряемого перпендикулярно вектору силы и между вектором силы и осью вращения трубного элемента, или измерения фактической силы, прилагаемой для воздействия крутящего момента на соединение, и вычисление крутящего момента на основе, по меньшей мере, одного измерения.
Приоритет по пунктам: 24.08.2006 по пп.1-12.
| Устройство для создания обратной местной промывки скважины | 1987 |
|
SU1470931A1 |
| Приводной трубный ключ | 1978 |
|
SU940636A3 |
| СТАЦИОНАРНЫЙ БУРОВОЙ КЛЮЧ | 1989 |
|
SU1834351A1 |
| Устройство контроля крутящего момента при свинчивании машинным ключом труб над устьем скважины | 1977 |
|
SU629330A1 |
| Моментомер для машинного ключа | 1981 |
|
SU977736A1 |
| КЛЮЧ ТРУБНЫЙ ГИДРАВЛИЧЕСКИЙ | 1999 |
|
RU2164464C2 |
| АВТОМАТИЧЕСКИЙ СТАЦИОНАРНЫЙ БУРОВОЙ КЛЮЧ | 1998 |
|
RU2143051C1 |
| US 3745820 A, 17.07.1973 | |||
| УСТРОЙСТВО ПОСТРОЕНИЯ ТРЕХМЕРНЫХ ФИГУР, СПОСОБ КОМБИНИРОВАНИЯ И СОЕДИНЕНИЯ ЗВУКОВ И СПОСОБ КОМБИНИРОВАНИЯ И СОЕДИНЕНИЯ ИЗОБРАЖЕНИЙ | 1993 |
|
RU2097089C1 |
| ВСТАВОЧНЫЕ УСТРОЙСТВА ДЛЯ ВСТАВКИ ПРОТЕЗА МЕЖПОЗВОНОЧНОГО ДИСКА | 2008 |
|
RU2476189C2 |

