Изобретение относится к электроизмерительной технике и может быть использовано для автоматической поверки стрелочных измерительных приборов (СИП).
Цель изобретения - повышение точности и производительности поверки.
Способ автоматической поверки предусматривает на первом этапе получение уравнения шкалы или аналитической связи между углом поворота (φ) стрелочного индикатора и показаниями по шкале (A). Эта связь может быть в общем случае представлена полиномом второй степени

где a0, a1, a2 - коэффициенты полинома. В том случае, если значения коэффициентов в выражении (1) заранее известны и при этом погрешность аппроксимации значительно меньше класса точности поверяемого прибора, первый этап не выполняется. Пусть F(x, y) - непрерывное изображение индикаторной части прибора, тогда дискретное изображение, полученное в результате сканирования по неполному растру, можно представить

где второй сомножитель является дискретизирующей функцией, состоящей из одинаковых импульсов P(x, y), которые образуют решетку с шагом (Δx, Δy). Обозначим дискретное изображение, соответствующее нулевому показанию прибора, как F0(i, j). F0(i, j) запоминается. При поступлении на вход прибора эталонного воздействия указатель отклоняется и после окончания переходного процесса производят в соответствии с выражением (2) преобразование соответствующего изображения, которое обозначим как F'(i, j). Запоминают F'(i, j). После этого производят вычитание

Причем в процессе вычитания производят формирование двух массивов, один из которых содержит изображение указателя f-(i, j), соответствующего нулевому показанию, другой - текущему f+(i, j).
Формирование происходит по следующему правилу:

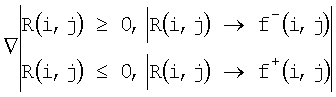
∇ - оператор, который, учитывая знак разности, производит формирование массивов;
R(i, j) - модуль разности, выполненный по выражению (3).
Таким образом, в массиве f-(i, j) будет находиться изображение только указателя в нулевом положении, при этом другая визуальная информация, находящаяся на шкале прибора (надписи, риски и т.д.), исчезает за счет вычитания. Аналогично массив f+(i, j) хранит только изображение, соответствующее текущему (после отклонения) положению указателя. После этого каждый элемент f-(i, j) и f+(i, j) сравнивают с порогом П и формируют два массива координат [X1, Y1] и [X2, Y2], которые определяют положение указателя в системе координат X0Y, т.е.

где

ξ - пороговая функция;
f*(i, j) - значение элементов массивов:
П1 и П2 - пороги.
Значения П1, П2 определяются путем анализа гистограмм распределения числовых значений элементов массивов f-(i, j) и f+(i, j). Эта гистограмма будет иметь двумодальный характер. Значение П будет соответствовать "впадине" между двумя "пиками". Необходимость выбора двух порогов обусловлена тем, что в общем случае числовые значения массивов f-(i, j) и f+(i, j) отличаются.
Затем координаты массивов [X1, Y1] и [X2, Y2] обрабатывают по методу наименьших квадратов, определяют угол поворота указателя следующим образом:

где X1, Y1 - значения координат, определяющих исходное положение указателя;
X2, Y2 - значения координат, определяющих текущее (в результате перемещения) положение указателя.
Угол поворота указателя φ рассчитывается как

Значение этого угла поворота подставляется в выражение (1) и определяется значение измеряемой величины A. После этого, зная значение эталонного сигнала A0, который подается на поверяемый прибор, вычисляют погрешность измерения

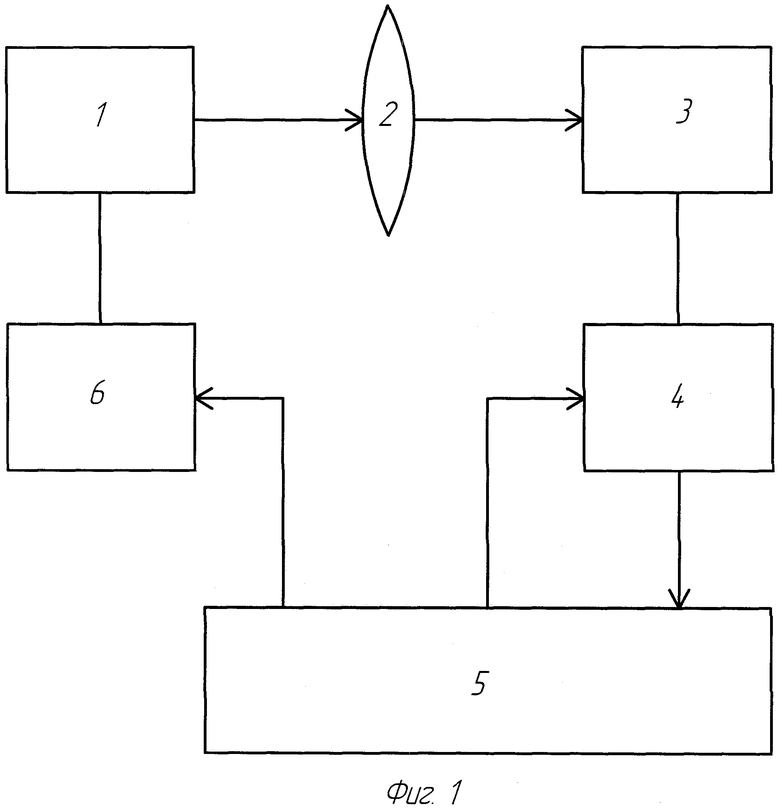
На фиг.1 приведена блок-схема устройства для осуществления способа; на фиг.2 - функциональная схема блока программно-управляемого сканирования.
Устройство для осуществления способа содержит последовательно соединенные поверяемый прибор 1, оптическую систему 2, передающую телевизионную камеру 3, блок 4 программно-управляемого сканирования, блок 5 управления и обработки и блок 6 формирования калиброванных сигналов, выход которого подключен к входу поверяемого прибора 1. При этом второй выход блока 5 управления и обработки подключен к управляемому входу блока 4 программно-управляемого сканирования.
Блок 4 программно-управляемого сканирования (фиг.2) содержит последовательно соединенные усилитель 7, преобразователь 8 напряжение - код, блок 9 сопряжения, блок 10 управления, блок 11 памяти и формирователь 12 окна считывания, выход которого подключен к второму входу преобразователя 8 напряжение - код, второй выход блока 10 управления подключен к входу блока 11 памяти, второй вход которого является выходом блока 4, вход усилителя 7 является входом, а выход блока 9 сопряжения является вторым выходом блока 4 программно-управляемого сканирования.
Устройство работает следующим образом.
Изображение индикаторной части поверяемого прибора 1 через оптическую систему 2 проецируется на фоточувствительную поверхность телевизионной камеры 3. С помощью блока 4 программно-управляемого сканирования изображение сканируется по минимальному для заданной точности количеству столбцов (строк), квантуется во времени и по уровню и записывается в блок 5 обработки и управления, причем число вводимых столбцов (строк) и шаг между ними определяются перед началом поверки, исходя из требуемой точности, и задаются программно в блок 4. После этого с выхода блока 6 формирования калиброванных сигналов, который управляется блоком 5, на поверяемый прибор 1 подается сигнал. Соответствующее новому показанию прибора изображение вновь записывается в память блока 5, который производит поэлементное вычитание двух изображений. В процессе поэлементного вычитания формируются два массива по следующему правилу: если знак разности между соответствующими элементами двух изображений меньше нуля, то модуль этой разности расписывается в первый массив, при положительном знаке вычитания значение модуля разности заносится во второй массив. Получают два массива, которые определяют нулевое и текущее положения указателя, после чего производят сравнение каждого элемента этих массивов с пороговым уровнем. Пороговый уровень определяют путем анализа, гистограммы распределения числовых значений элементов, т.е. модулей разности.
Если результат сравнения элементов указанных массивов с пороговым уровнем положителен, то координаты этих элементов запоминаются в блоке 5 обработки и управления. При этом образуются два массива координат точек, которые определяют исходное и текущее (в результате перемещения) положения средней линии указателя поверяемого прибора 1, как две прямые линии. Эта информация обрабатывается блоком 5, при этом угол наклона каждой прямой, соответствующей средней линии указателя, рассчитывается по методу наименьших квадратических отклонений или в соответствии с формулой (6). Значение угла поворота вычисляется блоком 5 по формуле (7). Значение этого угла представляется в ранее определенное уравнение шкалы, которое связывает ∝ и значение измеряемой величины A, считываемое по указателю. Таким образом, блок 5, используя уравнения (3)-(8), определяет погрешность измерения, которая хранится в памяти блока 5 или выводится на регистрирующее устройство (на фиг.3 не показано) в виде протокола поверки.
Блок 4 работает следующим образом. Перед началом поверки в блок 11 памяти из блока 5 записываются значения, определяющие размер и положение вводимого фрагмента изображения, а также количество вводимых столбцов и шаг между ними. После подачи соответствующей команды с блока 5 начинает работу блок 10 управления, который синхронизирует работу формирователя 12 окна считывания. При этом происходит выбор из блока 11 памяти ранее записанных значений и запись их в счетчики формирователя 12 окна считывания, который определяет окно сканирования и выдает соответствующие этому окну импульсы управления на преобразователь 8. Преобразователь 8 формирует цифровой код яркости каждой точки растра сканирования и с помощью блока 9 сопряжения передает их в блок 5э, где происходит обработка по изложенному методу. Усилитель 7 усиливает и нормирует входной сигнал по уровню.
Предлагаемое устройство позволит по сравнению с известными [1, 2] повысить производительность поверки путем исключения подготовительных операций перед поверкой каждого прибора, повысить точность и помехоустойчивость за счет обработки нескольких линий телевизионного растра и применения статистических методов обработки, расширить область применения, имея возможность поверки любых стрелочных приборов без занесения на шкалу вспомогательной информации.
Записываются значения, определяющие размер и положение вводимого фрагмента изображения, а также количество вводимых столбцов и шаг между ними. После подачи соответствующей команды с блока 5 начинает работу блок 10 управления, который синхронизирует работу формирователя 12 окна считывания. При этом происходит выбор из блока 11 памяти ранее записанных значений и запись их в счетчики формирователя 12 окна считывания, который определяет окно сканирования и выдает соответствующие этому окну импульсы управления на преобразователь 8. Преобразователь 8 формирует цифровой код яркости каждой точки растра сканирования и с помощью блока 9 сопряжения передает их в блок 5, где происходит обработка по изложенному методу. Усилитель 7 усиливает и нормирует входной сигнал по уровню.
Предлагаемое устройство позволит по сравнению с известным повысить производительность поверки путем исключения подготовительных операций перед поверкой каждого прибора, повысить точность и помехоустойчивость за счет обработки нескольких линий телевизионного растра и применения статистических методов обработки, расширить область применения, имея возможность поверки любых стрелочных приборов без занесения на шкалу вспомогательной информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической поверки стрелочных измерительных приборов и устройство для его осуществления | 1986 |
|
SU1383242A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ПОВЕРКИ СТРЕЛОЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1999 |
|
RU2152047C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ПОВЕРКИ СТРЕЛОЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503967C1 |
| Способ поверки стрелочного измерительного прибора и устройство для его осуществления | 1989 |
|
SU1753432A1 |
| Способ автоматической поверки электроизмерительных приборов | 1985 |
|
SU1277031A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОВЕРКИ СТРЕЛОЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1992 |
|
RU2054689C1 |
| Устройство для поверки стрелочных измерительных приборов и автоматического выбора типовой шкалы | 1987 |
|
SU1442953A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ МЕТРОЛОГИЧЕСКИХ | 1971 |
|
SU310205A1 |
| Установка для поверки измерительных приборов со стрелочным указателем | 1982 |
|
SU1057902A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО СЧИТЫВАНИЯ ПОКАЗАНИЙ СО ШКАЛ СТРЕЛОЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИХ ПОВЕРКЕ | 1991 |
|
RU2035746C1 |

Изобретение относится к области приборостроения и может найти применение в системах поверки измерительных устройств. Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит передающую телевизионную камеру, поверяемый прибор, блок обработки и управления, блок формирования калибровочных сигналов, блок программно-управляемого сканирования, оптическую систему. Предварительно устанавливают связь между углом поворота стрелочного указателя и показанием прибора, сканируют изображение индикаторной части прибора по минимальному количеству столбцов для заданного значения погрешности. Запоминают изображение, соответствующее нулевому показанию прибора. Задают дискретно возрастающий сигнал и запоминают второе изображение, соответствующее новому показанию прибора. Производят сравнение числовых значений элементов двух полученных массивов с пороговым уровнем. Определяют угол наклона двух прямых, проходящих через точки соответствующих массивов и угол поворота, по которому определяют показание стрелочного прибора и погрешность. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ автоматической поверки стрелочных измерительных приборов, основанный на обработке изображения индикаторной части измерительного прибора, заключающийся в определении угла поворота стрелочного индикатора измерительного прибора и сравнения его с заданными значениями углов, на которых располагаются оцифрованные отметки, и определении погрешности при подаче на поверяемый прибор сигнала от источника эталонных сигналов, отличающийся тем, что предварительно устанавливают связь между углом поворота стрелочного указателя и показанием прибора, сканируют изображение индикаторной части прибора по минимальному количеству столбцов для заданного значения погрешности, запоминают изображение, соответствующее нулевому показанию прибора, задают дискретно возрастающий сигнал и запоминают второе изображение, соответствующее новому показанию прибора, вычитают одно из другого, производят сравнение числовых значений элементов двух полученных массивов с пороговым уровнем, определяют угол наклона двух прямых, проходящих через точки соответствующих массивов, вычитают их, находят угол поворота, по которому определяют показание стрелочного прибора по предварительно установленной связи и вычитают погрешность.
2. Способ по п.1, отличающийся тем, что для установления связи между углом поворота стрелочного указателя и считываемым показанием, определяют утлы поворота стрелочного указателя, при совмещении указателя с оцифрованными отметками запоминают их и определяют уравнение шкалы, например, в виде полинома второй степени, связывающей угол поворота и показание.
3. Устройство для автоматической поверки стрелочных измерительных приборов, содержащее передающую телевизионную камеру, оптически соединенную с поверяемым прибором, блок обработки и управления, выход которого подключен к блоку формирования калиброванного сигнала, соединенного с клеммами для подключения поверяемого прибора, отличающееся тем, что в него введен блок программно-управляемого сканирования, вход которого подключен к выходу телевизионной передающей камеры, а выход - к блоку обработки и управления, а управляющий вход блока программно-управляемого сканирования подключен к второму выходу блока обработки и управления.
4. Устройство по п.3, отличающееся тем, что блок программно-управляемого сканирования содержит последовательно соединенные усилитель, преобразователь напряжение-код, блок сопряжения, блок управления, блок памяти и формирователь окна считывания, выход которого соединен с вторым входом преобразователя напряжение-код, а второй вход - с вторым выходом блока управления, при этом вход усилителя является первым входом, вход блока памяти - управляющим входом, а выход блока сопряжения является выходом блока программно-управляемого сканирования.
| Способ автоматического считывания показаний со шкал стрелочных измерительных приборов и устройство для осуществления | 1983 |
|
SU1112330A1 |
| БЕЗИКОВИЧ А.Я., ПРИЦКЕР В.И | |||
| И ЭСКИН С.П | |||
| Автоматизация поверки электроизмерительных приборов | |||
| - Л.: Энергия, 1976, с.7 | |||
| US 5005145 А, 02.04.1991 | |||
| Способ панкреатоеюностомии | 1988 |
|
SU1563677A1 |
| НАСОСНЫЙ АГРЕГАТ | 2003 |
|
RU2246639C1 |

