Изобретение относится к измерительной технике и может быть использовано при автоматизированных испытаниях и поверке измерительных приборов со стрелочным указателем.
Известны способы и устройства автоматической поверки стрелочных приборов, ос- нованные на фиксировании момента совпадения указателя поверяемого прибора с отметками шкалы или определения взаимного положения указателя и отметок шкалы с помощью оптико-электронных преобразователей.
Недостатками являются ограничение функциональных возможностей, низкое быстродействие, сложности в технической реализации.
Наиболее близким техническим решением, является способ автоматической поверки стрелочных измерительных приборов, где сканируют изображение индикаторной части измерительного прибора, запоминают изображение, задают дискретно возрастающий сигнал, запоминают второе изображение, соответствующее новому показанию прибора, вычитают одно изображение из другого, находят угол поворота указателя, по которому определяют показания стрелочного прибора, и вычисляют погрешность измерения.
vj ел
СО
4
СО Ю
Известное устройство содержит поверяемый прибор, передающую телевизионную камеру (датчик), блок программно-управляемого сканирования, блок обработки и управления, которое реализует описанный способ
Однако данный способ и устройство имеют следующие недостатки Способ и устройство предназначены для приборов с априорно известными значениями координат поверяемых отметок Кроме тогъ, при данном способе требуется строгая фиксация прибора во время измерений и высокая помехоустойчивость системы, так как в противном случае в результате вычитания разностный массив не даст изображения указателя в двух положениях, а будет содержать кроме массивов указателя и два массива шкал, достоверность поверки падает. Данный способ не применим для приборов с индивидуально изготовленными шкалами, так как не предусматривает определения положения отметок шкал
Цель изобретения - ускорение процесса поверки при одновременном повышении ее точности.
Поставленная цель достигается тем, что в способе автоматической поверки стрелочных измерительных приборов устанавливается связь между положением отметки шкалы и соответствующей измеряемой величиной, что достигается определением углов поворота стрелочного указателя при сканировании индикаторной ча сти стрелочного прибора по ее свободному полю и по стрелочному указателю, а расчетное значение входного сигнале для координат каждой отметки шкалы определяют интерполяцией. При наличии неоднозначности положения прибора устанавливается связь между координатами угловых положений отметок шкалы и заданными координатами реперных отметок. При наличии координатных искажений устанавливается связь между координатами угловых положений отметок шкалы и заданными координатами отметок дополнительной шкалы
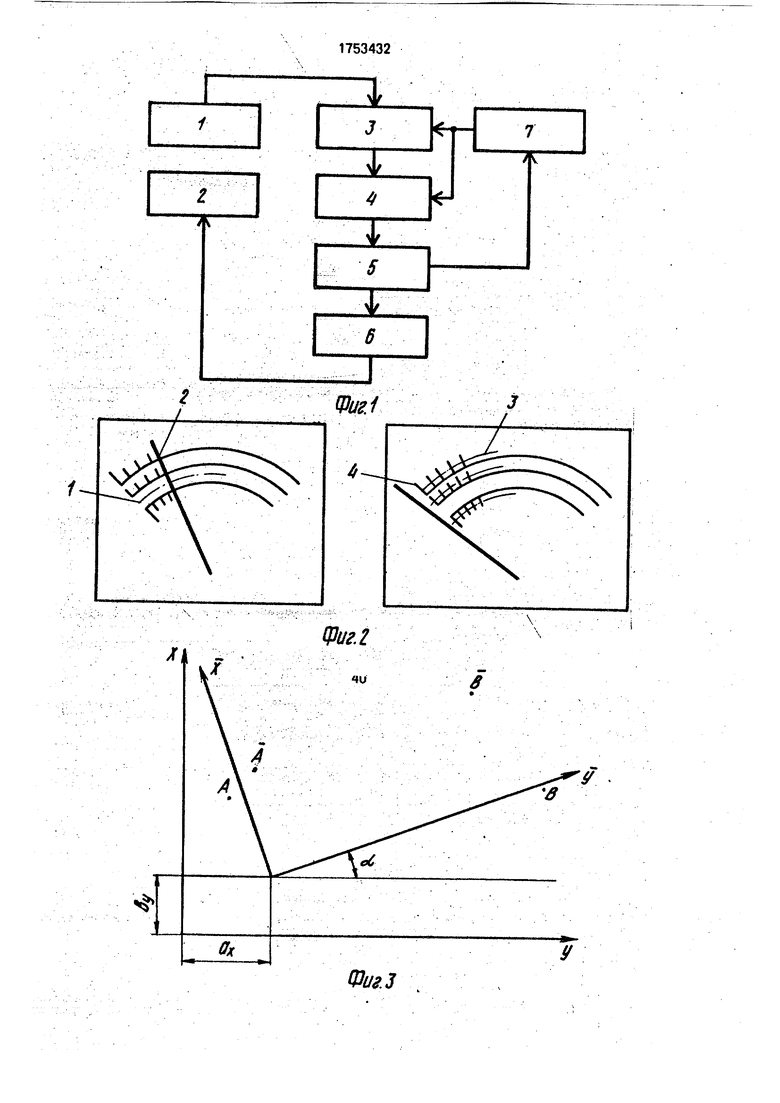
На фиг. 1-6 приведены схемы для иллюстрации предлагаемых способа и устройства.
Для установлейия связи между положением отметки шкалы и соответствующей измеряемой величиной определяют функцию преобразования угла поворота стрелочного указателя во входную измеряемую величину:
са f(Ai),(1)
где ел - угол поворота стрелочного указателя;
А - значение, соответствующее входной измеряемой величине
Функция (1) определяется следующим образом.
На измерительный стрелочный прибор
подают от формирователя калибровочного сигнала дискретно возрастающий сигнал, замеряют значения углов указателя, соответствующих каждому из значений входного сигнала, для чего сканируют изображение индикаторной части стрелочного измерительного прибора по свободному полю 1 и указателю 2, что обеспечивается выбором траектории сканирования 3 (фиг.2).
Получают табличное значение функции (1), которая запоминается, После чего сканируют изображение индикаторной части стрелочного измерительного прибора по отметкам шкалы 4 и определяют значения углов, соответствующих каждой отметке.
Затем по функции преобразования и значениям углов, соответствующих отметкам шкалы, методом линейной интерполяции, принимая значения функции (1) за базовые, пересчитывают значения углов отметок шкалы в значения входного калибровочного сигнала, что соответствует измеренным значениям входной величины
(Акш).
Каждой из отметок шкалы соответствует заданное значение образцового сигнала АО. Погрешность определяется как
35
б Акш - АО.
(2)
Для повышения производительности поверки, при наличии неоднозначности положения прибора под телевизионным датчиком, устанавливается связь между координатами угловых положений отметок шкалы и заданными координатами реперных отметок индикаторной части измерительного прибора.
Индикаторная часть измерительного прибора и изображение в декартовой системе координат,
На индикаторной части стрелочного измерительного прибора задаются отметки, принятые за реперные, координаты которых известны. После сканирования изображения определяются координаты реперов и
коэффициенты преобразования заданного положения индикаторной части измерительного прибора в изображение в виде переноса А и В, поворота а. , изменения масштаба АВ АВ (фиг 3)
Масштабный коэффициент определяется по формуле
,
LAB
(3)
где ХА, Хв, YA, YB - координаты реперных отметок изображения;
Хд, Хв, YA, YB - координаты реперных отметок индикаторной части измерительного прибора;
LAB - расстояние между реперами А и В индикаторной части измерительного прибора;
LAB - расстояние между реперами А и В изображения.
Разворот координатной системы изображения относительно координатной системы индикаторной части стрелочного измерительного прибора определяется по формулах
sin a
АУАВ;с08а АХАВ
LABLAB
(4)
Сдвиг начала координатной системы изображения относительно координатной системы индикаторной части стрелочного измерительного прибора определяется по формулах
a ХА - (Хд cos a- YA sin a)1
таb YA-(XAslna + YACOSCT)- ,
W
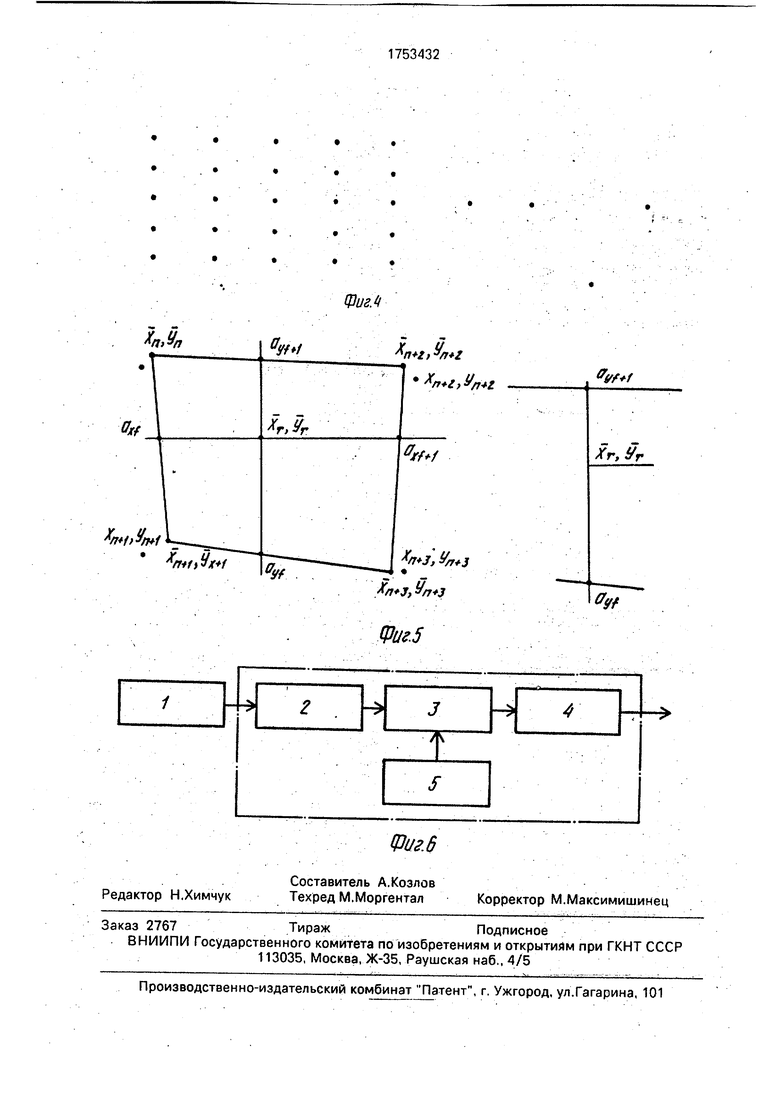
ляют координаты отметок. Шкала с помощью отметок разбивается на зоны (фиг.5). Для зоны, представляющей собой прямоугольник, с координатами узлов Хп, Yn,
Xn+1, Yn+i, Xn+2, Yn+2, Хр+з, Yji+з координаты изображения , п, Хп+1, Yn+i, Xn+2. Yn+2. Xn+з, п-кз, точка с координатами Хт, YT будет иметь изображение XT, YT.
Для прямого преобразования - перехода от координат изображения XT, YT к координате индикаторной части измерительного прибора Хт, YT необходимо Хт, YT отнести к соответствующей зоне шкалы и определить Хт, YT методом линейной интерполяции по формулах (фиг.5)
Хт Хп + (Хт - aXf)/Mx,
YT Yn-M + (YT-ayffi)/My.(7)
где axf, ayf+i - координаты линии пересечения прямой, проходящей через точки XT, YT с прямыми, проходящими через узлы, MX, My - масштабный коэффициент.
axf 1 - axf... ayf i - ayf . . MX -о:-- : My v v . . (8)
Хл - 2 Хп
Yn - Yn 1
Для обратного преобразования перехода координат индикаторной части измерительного прибора Хт, YT к изображению Хт, YT служат формулы
35
Хт axf + (Хт - Хп)-Мх, Yx - аум + (YT - Yn+i)-My.
(9)
Способ автоматической поверки стрелочных измерительных приборов и устройство для его осуществления относятся к измерительной технике. Цель изобретения - повышение точности и производительности поверки аналоговых измерительных приборов. По способу, реализованному в устройстве, содержащем телевизионный датчик, блок кадрового запоминающего устройства, блок расчета координат, блок обработки и управления, блок формирования калиброванного сигнала, блок формирования адреса, определяют функцию преобразования угла поворота стрелочного указателя во входную измеряемую величину. Погрешность определяется как разность между заданным значением образцового сигнала и пересчитанного по функции преобразования. Для повышения точности проводят совмещение системы координат изображения и индикаторной части измерительного прибора и учет координатных искажений. Данное техническое решение может использоваться для поверки приборов с индивидуально изготовленными шкалами без строгой фиксации под телевизионным датчиком, позволяет повысить точность за счет учета координатных искажений. 2 с. и 2 з.п. ф-лы, 6 ил. (Л С
где а - сдвиг по оси X; b - сдвиг по оси Y.
Используя коэффициенты, перевод координат любой точки индикаторной части измерительного прибора (Xi, YI) в координаты изображения (Xi, YI) производится по формулах
Xi-(Xicosa- YI sin a) -j. + a,
Yi (Xisln a+Yicos a) (6)
При наличии координатных искажений для повышения точности поверки устанавливается связь между координатами угловых положений отметок шкалы и заданными координатами дополнительной школы. В поле зрения телевизионного датчика помещают дополнительную шкалу (фиг.4) с известными координатами калибровочных отметок, сканируют изображение и опредеУстройство для осуществления способа содержит последовательно соединенные телевизионный датчик 1, стрелочный измерительный прибор 2, кадровый эапоминающий блок 3, формирователь 4 сигналов координат угловых положений отметок шкалы и стрелочного указателя, формирователь 5 управляющих сигналов, формирователь 6 калибровочного сигнала, формирователь 7
адреса (фиг. 1).
Устройство работает следующим образом.
Изображение индикаторной части стрелочного измерительного прибора 2 проецируется на фоточувствительную поверхность телевизионного датчика 1, изображение записывается в кадровый запоминающий блок 3. В память формирователя 5 управляющих сигналов записаны координаты отметок дополнительной шкалы, реперных отметок, координаты траектории сканирования индикаторной части измерительного прибора, по которым в формирователе 7 адреса формируется адрес сканирования изображения, записанного в кадровый запоминающий блок 3, Траектория сканирования формируется с учетом координатных искажений (уравнение (9), а также возможных перенос, поворот, изменение масштаба индикаторной части измерительного прибора (уравнения (3)-(6)).
Информация с выхода кадрового запоминающего блока 3 поступает в формирователь 4 сигналов координат угловых положений отметок шкалы и стрелочного указателя, где происходит расчет координат отметок и указателя.
Значения координат отметок и указателя поступают в формирователь 5 управляющих сигналов, где проиг- удится обработка текущей информации, вырабатывается управляющий сигнал, подаваемый на формирователь 6 калибровочного сигнала, с выхода которого сигнал подается на стрелочный измерительный прибор 2.
Предлагаемый способ автоматической поверки стрелочных измерительных приборов реализован в следующем устройстве (фиг.б).
Телевизионный датчик формирует полный телевизионный сигнал, который преобразуется к виду, позволяющему осуществить поэлементную запись сигнала изображения, следующим образом. С выхода телевизионного датчика 1 (например телевизионная камера КТП-63) видеосигнал поступает на вход квантователя 2, в котором видеосигнал квантуется по двум уровням, соответствующим Лог.О или Лог,1 в зависимости от яркости (реализован на компараторе КР521 СА4).
Квантованный по уровню сигнал поступает на информационные входы первого или второго регистров сдвига (К 531 ТМ9П) устройства 3 кодирования телевизионного сигнала. В зависимости от того, по какому полукадру идет запись информации в кадровом запоминающем блоке, по сигналу счетчика (К 155ИЕ7) открывается один из регистров. Параллельный код с выхода каждого из регистров через шинный формирователь (К 589АП26), регистр (К 589 ИР 162), мультиплексор (К 555КП2) поступает на входы данных ОЗУ 4 кадрового запоминающего блока. Запись информации в ОЗУ кадрового запоминающего блока идет по адресу, сформированному счетчиком (К 155ИЕ7) по сигналу Пуск с формирователя управляющих сигналов
В устройстве используются служебные команды полного телевизионного сигнала, для синхронизации работы используются тактовые сигналы генератора 5 тактовых импульсов
Считывание информации из кадрового запоминающего блока идет следующим образом.
Формирователь управляющих сигналов
формирует адрес, который подается на вход ОЗУ через шинный формирователь (К 589АП26), принимается информация поданному адресу также через шинный формирователь.
0 Оперативное запоминающее устройство кадрового запоминающего блока построено на микросхемах К565 РУ53.
В качестве формирователя управляющих сигналов используется микро-ЭВМ
5 МС 1201-02.
Предлагаемый способ автоматической поверки стрелочных измерительных приборов реализован следующим образом.
В поле зрения телевизионного датчика
0 помещается дополнительная шкала с известными координатами отметок, Изображение шкалы сканируется по окнам, задаваемых формирователем адреса, анализируются разряды каждого 16-разрядно5 го слова, задаваемых данным адресом, и при наличии Лог.1 в одном из разрядов запоминается координата каждой Лог.1 формирователе сигналов координат угловых положений отметок шкалы. Так
0 определяются координаты отметок дополнительной шкалы, которые записываются в запоминающее устройство формирователя управляющих сигналов. Затем в поле зрения телевизионного датчика помещается
5 стрелочный измерительный прибор. Сканируют изображение индикаторной части измерительного прибора в следующей последовательности1 сканируют реперы по окнам, адрес сканирования задается фор0 мирователем адреса по индикаторной части измерительного прибора. Определяют координаты реперов в формирователе сигналов координат угловых положений отметок шкалы стрелочного указателя по ним преоб5 разование типа переноса, поворота, изменения масштаба,
Так как траектория сканирования задается по координатной системе индикаторной части измерительного прибора, то для
0 перехода к системе координат изображения координаты траектории сканирования преобразовываются в следующей последовательности: преобразование типа переноса, поворота, изменения масштаба, обратные
5 преобразования, что позволяет сформировать траекторию сканирования, проходящую через середину отметок шкалы в виде ломаной линии или окружности, а также по свободному полю и указателю, и получают координаты отметок шкалы и указателя. Для
расчета угла поворота указателя проводят прямые преобразования и преобразования типа переноса, поворота, измененияГмасш- таба, что позволяет перейти от изображения к индикаторной части измерительного прибора.
Способ автоматической поверки стрелочных измерительных приборов позволяет снизить время поверки много- шкальных стрелочных измеритеЯьнйх приборов с количеством отметок около 150, ориентировочно в пять раз, повышается эффективность контроля за счет увеличения точности поверки, снижается трудоемкость.
Формулаизобретения
подсоединенный первым входом к выходу телевизионного датчика, и формирователь адреса, соединенный входом с вторым выходом формирователя управляющих сигналов, причем формирователь сигналов
координат угловых положений отметок шкалы и стрелочной указателя подсоединен первым входом к выходу кадрового запоминающего блока и соединен вторым входом с выходом формирователя адреса, подключенным к второму входу кадрового запоминающего блока.
tf
Фи&З
п+г ул+г
ffw+f
Хг,Ут
0yt
| Способ автоматического считывания показаний со шкал стрелочных измерительных приборов и устройство для осуществления | 1983 |
|
SU1112330A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автоматической поверки стрелочных измерительных приборов и устройство для его осуществления | 1986 |
|
SU1383242A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
