Изобретение относится к вычислительной технике и может быть использовано для автоматизации поверки стрелочных измерительных приборов.
Из существующего уровня техники известно устройство для автоматической поверки стрелочных измерительных приборов, содержащее блок обработки и управления, выход которого подключен к блоку формирования калиброванных сигналов, соединенный с клеммами для подключаемого прибора, программно управляемый оптический сканер планшетного типа, на считываемое поле которого помещается поверяемый прибор, а выход сканера подключен к блоку обработки и управления (Патент №2152047 С1, кл. G01R 35/00, опубл. 27.06.2000). Выполняется сканирование шкалы поверяемого прибора при изменении входного сигнала от нуля до номинального значения конечной отметки шкалы, определяется графическая зависимость угла отклонения стрелки от сигнала, подаваемого а вход поверяемого прибора, по полученному графику определяют значения входного сигнала.
Недостатком этого устройства является низкая скорость поверки прибора из-за применения для считывания показаний оптического сканера.
Наиболее близким к предлагаемому является устройство для автоматической поверки стрелочных измерительных приборов, содержащее передающую телевизионную камеру, оптически соединенную с поверяемым прибором, блок обработки и управления, выход которого подключен к блоку формирования калиброванного сигнала, соединенного с клеммами для подключения поверяемого прибора, блок программно-управляемого сканирования, вход которого подключен к выходу телевизионной передающей камеры, а выход - к блоку обработки и управления, а управляющий вход блока программно-управляемого сканирования подключен к второму выходу блока обработки и управления (Патент №240440 С1, кл. G01R 35/00, опубл. 20.11.2010, бюл. №32), принятое за прототип. Предварительно устанавливают связь между углом поворота стрелочного указателя и показанием прибора, сканируют изображение индикаторной части прибора, запоминают изображение, соответствующее нулевому показанию прибора, задают дискретно возрастающий сигнал и запоминают и запоминают второе изображение, соответствующее новому показанию прибора; производят сравнение числовых значений элементов двух полученных массивов с пороговым уровнем; методом наименьшего квадратичного отклонения определяют угол наклона двух прямых, проходящих через точки соответствующих массивов; рассчитывают угол поворота как функцию разности арктангенса значения конечного угла наклона и арктангенса значения начального угла наклона; определяют показание стрелочного прибора по рассчитанному углу поворота.
Недостатком устройства, принятого за прототип, является низкая скорость поверки прибора из-за использования передающей телевизионной камеры, что усложняет ввод и обработку изображения индикаторной части поверяемого прибора и является причиной добавления дополнительного блока программно-управляемого сканирования, а также из-за больших временных затрат при вычислении методом наименьшего квадратичного отклонения и расчета функции арктангенса.
Технической задачей устройства является сокращение времени поверки стрелочных измерительных приборов.
Техническая задача решается тем, что в устройство, содержащее блок формирования калиброванного сигнала (БФКС), соединенного с клеммами для подключения поверяемого прибора, введены цифровая камера (ЦК), первый контроллер ввода-вывода (КВВ1), микроконтроллер (МК), второй контроллер ввода-вывода (КВВ2), блок оперативной памяти (БОП), блок энергонезависимой памяти (БЭНП), причем первый выход МК соединен с управляющим входом КВВ1 для передачи управляющего сигнала, второй выход МК соединен с управляющим входом БОП для управления режимом работы (чтение/запись), третий выход МК соединен с управляющим входом БЭНП для управления режимом работы (чтение/запись), четвертый выход МК соединен с управляющим входом КВВ2 для передачи управляющего сигнала, входы-выходы шины адреса (ША) МК подключены к входам ША БОП для передачи адреса, а также подключены к входам ША БЭНП для передачи адреса, входы-выходы шины данных (ШД) МК подключены к входам ШД КВВ1 для получения данных, а также подключены к входам-выходам ШД БОП для передачи и получения данных, а также подключены к входам-выходам ШД БЭНП для передачи и получения данных, а также подключены к выходам ШД КВВ2 для получения данных; вход ЦК оптически соединен с индикаторной частью поверяемого прибора, а выход ЦК электрически соединен с информационным входом КВВ 1 для получения цифровых данных; вход БФКС электрически соединен с информационным выходом КВВ2 для передачи управляющих сигналов.
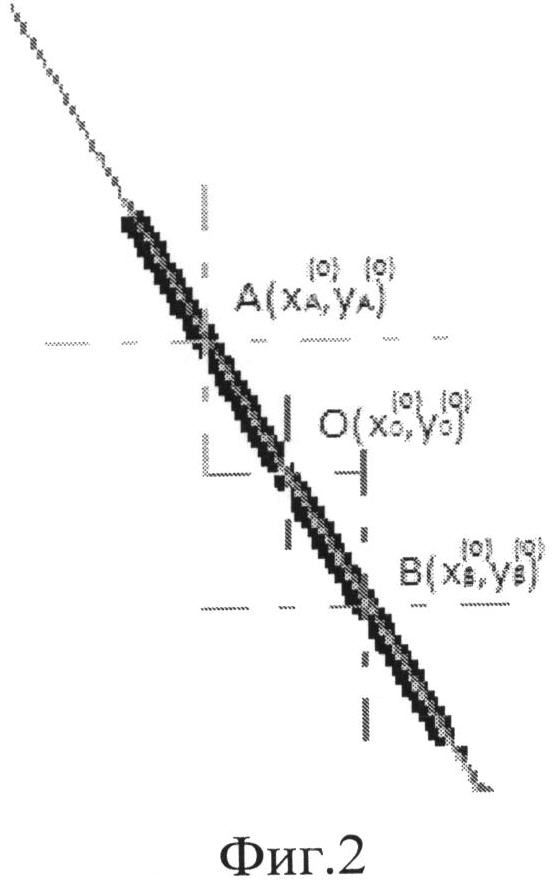
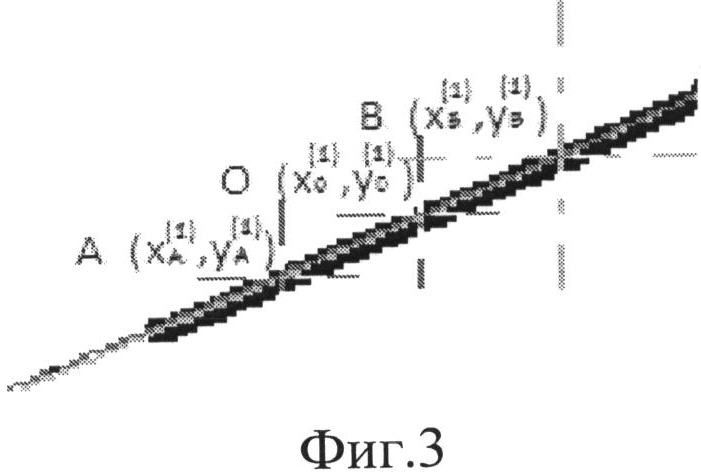
Сущность изобретения поясняется чертежом, где на фиг.1 представлена структурная схема устройства для автоматической поверки стрелочных измерительных приборов, на фиг.2 показано типичное изображение начального отклонения стрелочного указателя прибора, на фиг.3 показано типичное изображение конечного отклонения стрелочного указателя прибора.
Устройство для автоматической поверки стрелочных измерительных приборов содержит цифровую камеру (ЦК) 1, первый контроллер ввода-вывода (КВВ1) 2, микроконтроллер (МК) 3, второй контроллер ввода-вывода (КВВ2) 4, блок формирования калиброванных сигналов (БФКС) 5, блок оперативной памяти (БОП) 6, блок энергонезависимой памяти (БЭНП) 7, поверяемый прибор 8, причем первый выход МК 3 соединен с управляющим входом КВВ1 2, второй выход МК 3 соединен с управляющим входом БОП 6, третий выход МК 3 соединен с управляющим входом БЭНП 7, четвертый выход МК 3 соединен с управляющим входом КВВ2 4, входы-выходы шины адреса (ША) МК 3 подключены к входам ША БОП 6, а также подключены к входам ША БЭНП 7; входы-выходы шины данных (ШД) МК 3 подключены к входам ШД КВВ1 2, а также подключены к входам-выходам ШД БОП 6, а также подключены к входам-выходам ШД БЭНП 7, а также подключены к выходам ШД КВВ2 4; вход ЦК 1 оптически соединен с индикаторной частью поверяемого прибора 8, а выход ЦК 1 электрически соединен с информационным входом КВВ1 2; вход БФКС 5 электрически соединен с информационным выходом КВВ2 4, а выход БФКС 5 соединен с клеммами для подключения поверяемого прибора 8.
Устройство работает следующим образом.
Алгоритм автоматической поверки стрелочных измерительных приборов включает в себя процедуру генерации и подачи калиброванного. сигнала, соответствующего начальному показанию, на входы поверяемого прибора 8, процедуру снятия начального показания поверяемого прибора 8, процедуру генерации и подачи калиброванного сигнала, соответствующего конечному показанию, на входы поверяемого прибора 8, процедуру снятия конечного показания поверяемого прибора 8, процедуру обработки полученных изображений, процедуру расчета погрешности поверяемого прибора 8.
Процедура генерации и подачи калиброванного сигнала на входы поверяемого прибора заключается в выполнении последовательности следующих шагов. МК 3 подает управляющий сигнал чтения на БЭНП, одновременно устанавливая на ША адрес ячейки, содержащей управляющее слово, соответствующее режиму генерации тестовых сигналов БФКС 5, для отклонения стрелки прибора 8 в начальное положение, после чего БЭНП 7 выставляет на ШД управляющее слово, после чего МК 3 подает управляющий сигнал чтения на КВВ2 4, после чего КВВ2 4 считывает управляющее слово, переходит в режим задания выбранного режима работы БФКС 5, передавая на вход БФКС 5 информационные сигналы, соответствующие режиму генерации тестовых сигналов, подаваемых на вход поверяемого прибора 8, для отклонения стрелки в начальное положение. Результат работы процедуры: отклонение стрелки поверяемого прибора 8 в положение, соответствующее начальному показанию.
Процедура снятия начального показания поверяемого прибора 8 заключается в выполнении последовательности следующих шагов. ЦТС 1, оптически соединенная с поверяемым прибором 8, выполняет фотографирование (формирование кадра) индицируемой части прибора 8. МК 3 подает управляющий сигнал чтения кадра изображения на КВВ1 2, одновременно подавая управляющий сигнал записи на БОП 6 и устанавливая на ША адрес свободной ячейки в БОП 6. Затем МК 3 циклически подает управляющий сигнал выдачи очередного слова кадра на КВВ1, и управляющий сигнал записи в БОП 6, с одновременной установкой на ША адреса следующей свободной ячейки, после чего КВВ1 2 устанавливает на ШД очередное слово кадра, а БОП 6 записывает очередное слово кадра по адресу, заданному на ША, до тех пор пока не закончится передача кадра. Результат работы процедуры: БОП 6 хранит изображение (кадр) начального показания поверяемого прибора 8.
Процедура генерации и подачи калиброванного сигнала, соответствующего конечному показанию, на входы поверяемого прибора 8, заключается в выполнении последовательности следующих шагов. МК 3 подает управляющий сигнал чтения на БЭНП, одновременно устанавливая на ША адрес ячейки, содержащей управляющее слово, соответствующее. режиму генерации тестовых сигналов БФКС 5, для отклонения стрелки прибора 8 в конечное положение, после чего БЭНП 7 выставляет на ШД управляющее слово, после чего МК 3 подает управляющий сигнал чтения на КВВ2 4, после чего КВВ2 4 считывает управляющее слово, переходит в режим задания выбранного режима работы БФКС 5, передавая на вход БФКС 5 информационные сигналы, соответствующие режиму генерации тестовых сигналов, подаваемых на вход поверяемого прибора 8, для отклонения стрелки в конечное положение. Результат работы процедуры: отклонение стрелки поверяемого прибора 8 в положение, соответствующее конечному показанию.
Процедура снятия конечного показания поверяемого прибора 8 заключается в выполнении последовательности следующих шагов. ЦК 1, оптически соединенная с поверяемым прибором 8, выполняет фотографирование (формирование кадра) индицируемой части прибора 8. МК 3 подает управляющий сигнал чтения кадра изображения на КВВ1 2, одновременно подавая управляющий сигнал записи на БОП 6 и устанавливая на ША адрес свободной ячейки в БОП 6. Затем МК 3 циклически подает управляющий сигнал выдачи очередного слова кадра на КВВ1, и управляющий сигнал записи в БОП 6, с одновременной установкой на ША адреса следующей свободной ячейки, после чего КВВ1 2 устанавливает на ШД очередное слово кадра, а БОП 6 записывает очередное слово кадра по адресу, заданному на ША, до тех пор пока не закончится передача кадра. Результат работы процедуры: БОП 6 хранит изображение (кадр) конечного показания поверяемого прибора 8.
Процедура обработки полученных изображений заключается в выполнении последовательности следующих шагов. Выполняется вычитание изображений конечного показания и начального показания поверяемого прибора 8. Для этого в цикле по всем пикселям изображения МК 3 производит последовательную выборку сначала пикселя первого изображения, подавая управляющий сигнал чтения на БОП 6, а также устанавливая на ША адрес пикселя, а также, после выставления БОП 6 на ШД значения пикселя, сохраняя значения пикселя в внутренней регистровой памяти, а затем производит выборку пикселя второго изображения, подавая управляющий сигнал чтения на БОП 6, а также устанавливая на ША адрес пикселя, а также, после выставления БОП 6 на ШД значения пикселя, считывает значение пикселя с ШД, сохраняя его в внутренней регистровой памяти; а затем производит вычитание двух пикселей р0, р1, и вычисление двух значений f0, f1 по формулам
f0=|p0-p1|, если |p0-p1|>0;
f1=|p0-p1|, если |p0-p1|≤0;
затем производит сравнение двух полученных значений с пороговым значением Т и их изменение по формулам
причем значение Т хранится в БЭНП 7 и записывается в БОП 6 при включении устройства; затем увеличивает на единицу программный счетчик n1 пикселей черного цвета f0=1 для первого изображения, определяя область, принадлежащую объекту указателя; затем увеличивает на единицу программный счетчик пикселей n2 черного цвета f1=1 для второго изображения, тем самым формируя массивы пикселей двух бинарных изображений I0(i,j), I1(i,j), из которых первое соответствует начальному показанию, а второе соответствует конечному показанию; а затем выполняет запись обоих полученных массивов пикселей I0(i,j), I1(i,j), для каждого пикселя подавая на БОП 6 сигнал записи, одновременно устанавливая на ША адрес свободной ячейки памяти, после чего устанавливая на ШД значение пикселя, обеспечивая запись БОП 6 значения пикселя с ШД. Определяются координаты центра стрелочного указателя первого изображения I0(i,j) по формулам
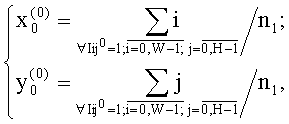
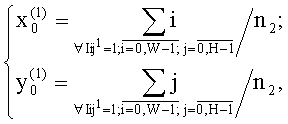
где H, W - соответственно высота и ширина изображения в пикселях. Для этого в цикле по всем черным пикселям для изображений I0(i,j), I1(i,j) МК 3 производит выборку очередного пикселя, подавая управляющий сигнал чтения на БОП 6, а также устанавливая на ША адрес пикселя, а также, после выставления БОП 6 на ШД значения пикселя, сохраняя абсциссу i и ординату j пикселя в внутренней регистровой памяти, после чего производит операцию накапливающего сложения, по окончании цикла выполняет операцию целочисленного деления, запоминая координаты  ,
,  , и
, и  ,
,  в регистровой памяти. Определяются координаты
в регистровой памяти. Определяются координаты  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  центров образованных отрезков по следующим формулам:
центров образованных отрезков по следующим формулам:
где k1 - число черных пикселей в первом отрезке первого изображения указателя, k2 - число черных пикселей в первом отрезке второго изображения указателя, s1 - число черных пикселей во втором отрезке первого изображения указателя, s2 - число черных пикселей во втором отрезке второго изображения указателя. Для этого в цикле по черным пикселям для изображений I0(i,j), I1(i,j) МК 3 производит выборку очередного пикселя, подавая управляющий сигнал чтения на БОП 6, а также устанавливая на ША адрес пикселя, а также, после выставления БОП 6 на ШД значения пикселя, сохраняя абсциссу i и ординату j пикселя в внутренней регистровой памяти, после чего производит операцию накапливающего сложения, по окончании цикла выполняет операцию целочисленного деления, запоминая координаты , , , , , , , регистровой памяти. Вычисляется угол наклона указателя на каждом изображении по координатам двух точек в МК 3 по формулам
после чего r(0) и r(1) запоминаются в регистровой памяти МК 3. Вычисляются значения углов начального и конечного отклонения указателя по формулам
φ0=arctg(r(0)); φ1=arctg(r(1)),
где φ0 - угол начального отклонения указателя, φ1 - угол конечного отклонения указателя, для чего МК 3 производит выборку значения функции арктангенс от аргумента r(0), подавая управляющий сигнал чтения на БЭНП 7, а также устанавливая на ША адрес ячейки, содержащей значение функции от данного аргумента, а также, после выставления БЭНП 7 на ШД данных, сохраняя значение функции арктангенс от аргумента r(0) в внутренней регистровой памяти; после чего МК 3 производит выборку значения функции арктангенс от аргумента r(1), подавая управляющий сигнал чтения на БЭНП 7, а также устанавливая на ША адрес ячейки, содержащей значение функции от данного аргумента, а также, после выставления БЭНП 7 на ШД данных, сохраняя значение функции арктангенс от аргумента r(1) в внутренней регистровой памяти. Результат работы процедуры: рассчитанные значения углов φ0 начального и φ1 конечного отклонения указателя в градусах.
Процедура расчета погрешности поверяемого прибора 8 заключается в вычислении значения угла φ поворота указателя в МК 3 по формуле
φ=φ1-φ0,
после чего определяется погрешность измерения на основе записанного ранее известного значения измеряемой величины. Для этого МК 3 подает управляющий сигнал чтения на БЭНП, одновременно устанавливая на ША адрес ячейки, содержащей эталонное значение угла отклонения, после чего БЭНП 7 выставляет на ШД слово данных, после чего МК 3 считывает с ШД слово данных, а затем выполняет операцию вычитания, записывая результирующее значение в регистровую память. Результат работы процедуры: рассчитанное значение погрешности прибора.
Таким образом, предложенное решение позволяет сократить время поверки стрелочных измерительных приборов за счет введения в устройство цифровой камеры, первого контроллера ввода-вывода, микроконтроллера, второго контроллера ввода-вывода, блока оперативной памяти, блока энергонезависимой памяти и использования эффективного алгоритма автоматической поверки стрелочных измерительных приборов, из которого исключена затратная по времени выполнения операция умножения, а также за счет вычисления функции арктангенса аргумента на основе табличных значений, хранящихся в блоке энергонезависимой памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОВЕРКИ СТРЕЛОЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404440C1 |
| Способ автоматической поверки стрелочных измерительных приборов и устройство для его осуществления | 1986 |
|
SU1383242A1 |
| Способ поверки стрелочного измерительного прибора и устройство для его осуществления | 1989 |
|
SU1753432A1 |
| Автоматическое устройство для поверки стрелочных электроизмерительных приборов | 1985 |
|
SU1320783A1 |
| Устройство для поверки стрелочных приборов | 1981 |
|
SU960690A1 |
| Устройство для автоматической поверки стрелочных электроизмерительных приборов | 1990 |
|
SU1830495A1 |
| Установка для поверки измерительных приборов со стрелочным указателем | 1982 |
|
SU1057902A1 |
| СПОСОБ КОМПЕНСАЦИИ РАЗМЫТОСТИ ИЗОБРАЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2337501C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ПОВЕРКИ СТРЕЛОЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1999 |
|
RU2152047C1 |
| Устройство для преобразования положения меток шкалы и указателя стрелочного прибора в электрические сигналы | 1981 |
|
SU1004931A1 |
Изобретение относится к вычислительной технике и может быть использовано для автоматизации поверки стрелочных измерительных приборов. Техническим результатом устройства является сокращение времени поверки стрелочных измерительных приборов. Технический результат достигается тем, что в устройство, содержащее блок формирования калиброванного сигнала, соединенного с клеммами для подключения поверяемого прибора, введены цифровая камера, первый контроллер ввода-вывода, микроконтроллер, второй контроллер ввода-вывода, блок оперативной памяти, блок энергонезависимой памяти. Автоматическая поверка стрелочных измерительных приборов осуществляется путем генерации и подачи калиброванного сигнала, соответствующего начальному показанию, на входы поверяемого прибора, снятия начального показания, генерации и подачи калиброванного сигнала, соответствующего конечному показанию, на входы поверяемого прибора, снятия конечного показания, обработки полученных изображений, расчета погрешности поверяемого прибора. 3 ил.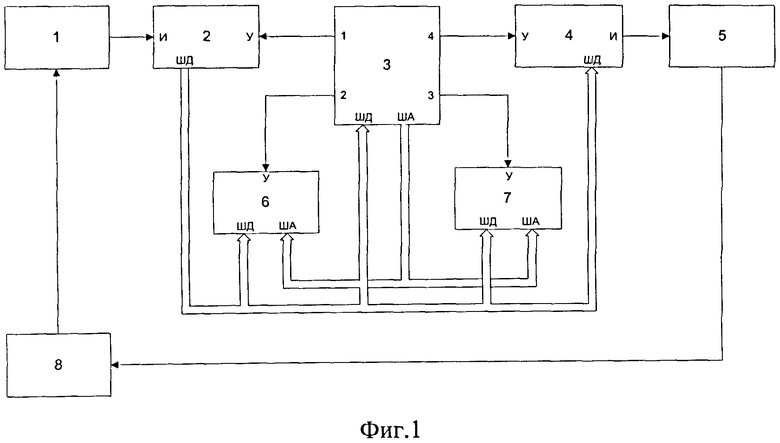
Устройство для автоматической поверки стрелочных измерительных приборов, содержащее блок формирования калиброванного сигнала, соединенного с клеммами для подключения поверяемого прибора, отличающееся тем, что введены цифровая камера, первый контроллер ввода-вывода, микроконтроллер, второй контроллер ввода-вывода, блок оперативной памяти, блок энергонезависимой памяти, причем первый выход микроконтроллера соединен с управляющим входом первого контроллера ввода-вывода для передачи управляющего сигнала, второй выход микроконтроллера соединен с управляющим входом блока оперативной памяти для управления режимом работы, третий выход микроконтроллера соединен с управляющим входом блока энергонезависимой памяти для управления режимом работы, четвертый выход микроконтроллера соединен с управляющим входом второго контроллера ввода-вывода, для передачи управляющего сигнала, входы-выходы шины адреса микроконтроллера подключены к входам шины адреса блока оперативной памяти для передачи адреса, а также подключены к входам шины адреса блока энергонезависимой памяти для передачи адреса, входы-выходы шины данных микроконтроллера подключены к входам шины данных первого контроллера ввода-вывода для получения данных, а также подключены к входам-выходам шины данных блока оперативной памяти для передачи и получения данных, а также подключены к входам-выходам шины данных блока энергонезависимой памяти для передачи и получения данных, а также подключены к выходам шины данных второго контроллера ввода-вывода для получения данных; вход цифровой камеры оптически соединен с индикаторной частью поверяемого прибора, а выход цифровой камеры электрически соединен с информационным входом первого контроллера ввода-вывода для получения цифровых данных; вход блока формирования калиброванного сигнала электрически соединен с информационным выходом второго контроллера ввода-вывода для передачи управляющих сигналов.
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОВЕРКИ СТРЕЛОЧНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404440C1 |
| Устройство для допускового контроля стрелочных приборов | 1988 |
|
SU1597811A1 |
| US 5005145 A, 02.04.1991 | |||
| US 20090256549 А1, 15.10.2009 | |||
| EP 1959267 В1, 18.11.2009. | |||

