Изобретение относится к машиностроению, в частности к бесшатунным поршневым механизмам. Может применяться в поршневых двигателях внутреннего сгорания, компрессорах, насосах и т.п.
Ромбический кривошипно-планетарный поршневой механизм предназначен для взаимопреобразования вращательного движения кривошипов в возвратно-поступательное перемещение поршней бесшатунным способом.
Известен механизм двигателей с бесшатунным механизмом (С.С.Баландин. «Бесшатунные поршневые двигатели внутреннего сгорания». М.: Машиностроение, 1972), в котором вместо шатуна используется жестко соединенный с поршнями шток, который возвратно-поступательно перемещается по боковым направляющим, связан с коленчатым валом, вращающимся в цапфах, синхронизированных через промежуточный вал зубчатой передачей.
Однако в известном механизме отсутствует компенсация предельных отклонений размеров межцентровых расстояний в коленчатом вале и радиусах кривошипов, что требует высочайшей точности изготовления и значительно снижает ресурс работы двигателя.
Известен механизм двигателя внутреннего сгорания (патент РФ №2157897, МПК F02B 33/16, F02B 75/30, опубл. 20.10.2000), ближайший по технической сущности к заявляемому и принятый за прототип, содержащий корпус с цилиндром, в котором расположен шток, соединенный с поршнем, и имеющий шарнирный узел, соединенный с планетарными шатунами, связанными с кривошипами. Планетарные шатуны имеют равные радиусам кривошипов межцентровые расстояния. Выходной вал выполнен с возможностью передачи вращения одного кривошипа тремя шестернями и другого кривошипа - двумя шестернями с сохранением передаточного отношения.
Однако в известном механизме двигателя невозможно осуществить его запуск непосредственным вращением кривошипов, т.к. в серединном положении, когда шарнирный узел становится соосным планетарным шатунам и кривошипам, кривошипы и планетарные шатуны будут вращаться совместно, при этом отсутствует перевод суммарной силы, сосредоточенной на шарнирном узле, в крутящий момент на встречно-вращающихся кривошипах, и обратно: отсутствует перевод крутящего момента на кривошипах в силу на шарнирном узле.
Также в известном механизме двигателя отсутствует устройство, компенсирующее предельные отклонения размеров межцентровых расстояний планетарных шатунов и радиусов кривошипов, что требует высокой точности изготовления и снижает надежность работы механизма в целом.
Приведенные известные механизмы обладают сложной технологичностью изготовления и низким уровнем ремонтопригодности.
Задачей изобретения является повышение надежности работы механизма, уменьшение износа и увеличение ресурса механизма при допустимом упрощении технологии изготовления и ремонтопригодности.
Поставленная задача достигается тем, что в ромбическом кривошипно-планетарном поршневом механизме, включающем корпус с цилиндром, в котором расположен шток с закрепленным на нем поршнем, соединенный через шарнирный узел с планетарными шатунами, связанными с кривошипами, причем межцентровые расстояния планетарных шатунов равны радиусам кривошипов, выходной вал с возможностью передачи вращения от правого кривошипа тремя шестернями, и от левого кривошипа - двумя шестернями с сохранением передаточного отношения, новым является то, что шарнирный узел содержит центральный шарнир и закрепленный в нем шарнирный палец, а планетарные шатуны имеют синхронизирующие упоры, расположенные на линии, проходящей через центры вращения планетарных шатунов, на расстоянии, равном радиусу кривошипов от центров вращения планетарных шатунов, а в корпусе расположены гнезда упоров на линии, проходящей через центры вращения кривошипов на расстоянии, равном двум радиусам кривошипов, и перпендикулярной оси движения штока.
Планетарные шатуны связаны с кривошипами через посадочные гнезда.
Шарнирный узел дополнительно содержит сферические подшипники, установленные в посадочные гнезда планетарных шатунов.
В центрах вращения планетарных шатунов, кривошипов, трех шестерней правого кривошипа и двух шестерней левого кривошипа установлены подшипники качения.
Кривошипы выполнены соосными и встречно-вращающимися.
Сущность изобретения поясняется фиг.1, фиг.2 и фиг.3.
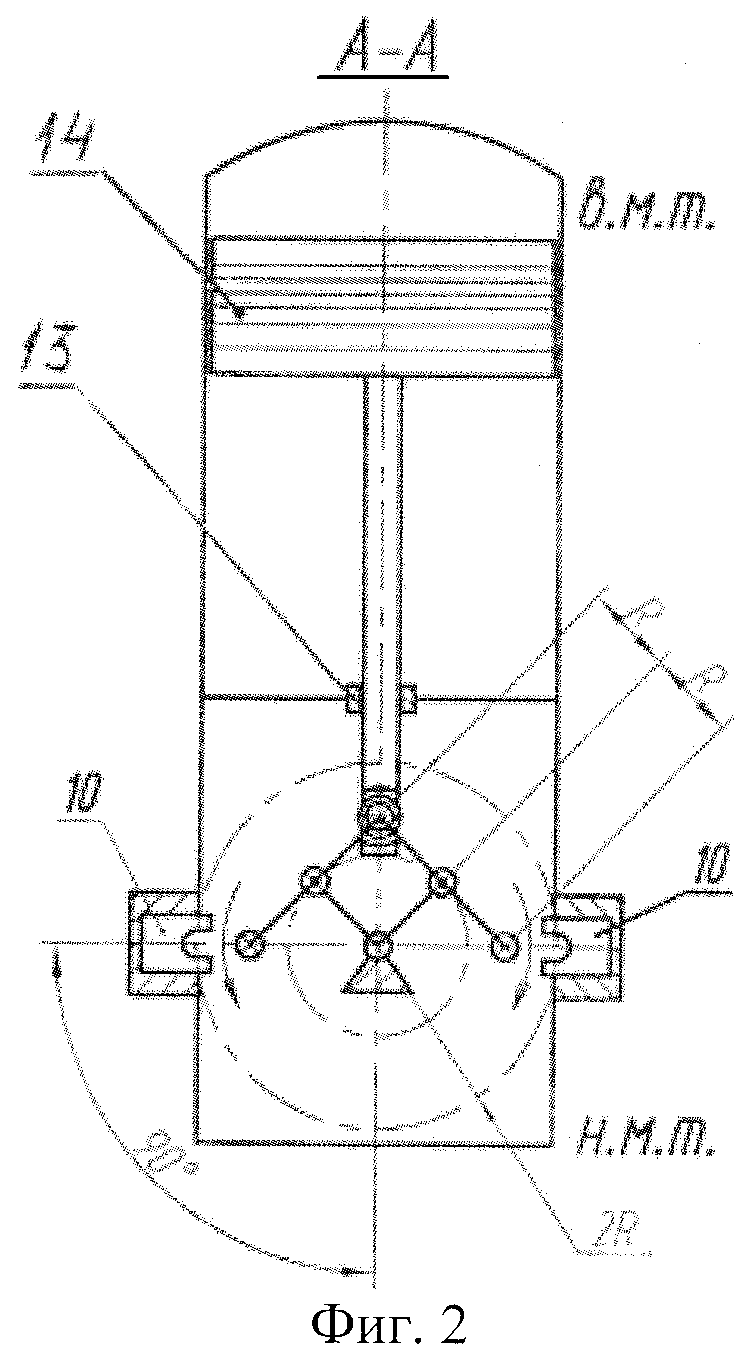
На фиг.1 представлен ромбический кривошипно-планетарный поршневой механизм.
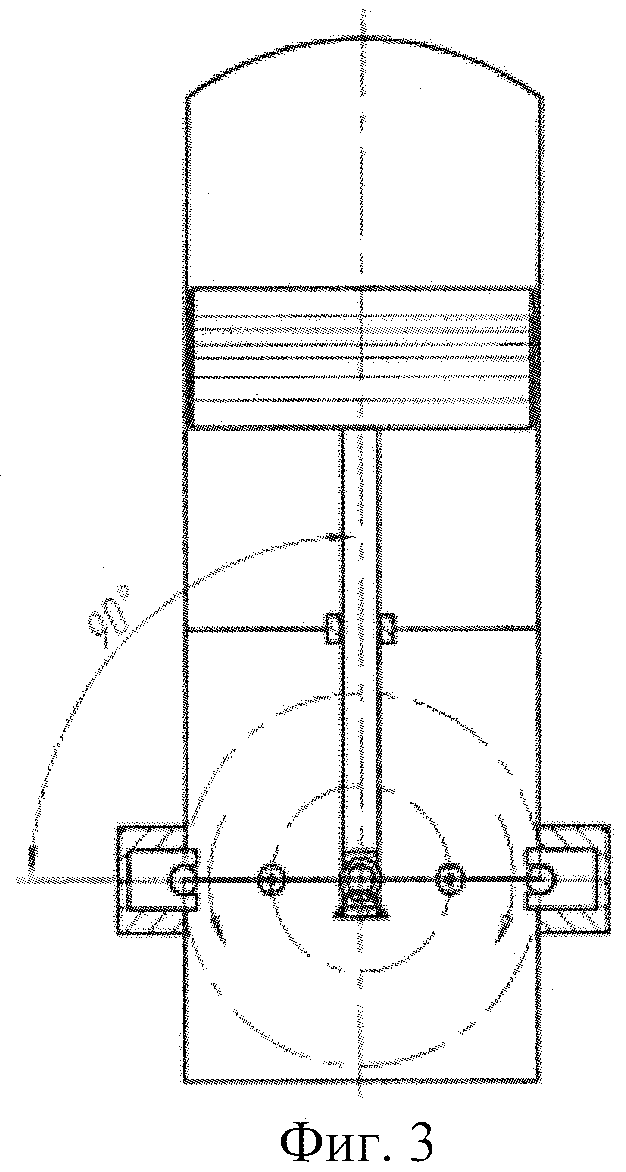
На фиг.2 представлен ромбический кривошипно-планетарный поршневой механизм при движении штока с поршнем в нижнюю мертвую точку (НМТ).
На фиг.3 представлен ромбический кривошипно-планетарный поршневой механизм в середине рабочего хода.
Здесь 1 - корпус с цилиндром; 2 - шток; 3 - центральный шарнир; 4 - планетарные шатуны; 5 - кривошипы; 6 - выходной вал; 7 - три шестерни правого кривошипа; 8 - две шестерни левого кривошипа; 9 - синхронизирующие упоры; 10 - гнезда упоров; 11 - шарнирный палец; 12 - сферические подшипники; 13 - направляющая штока; 14 - поршень.
Ромбический кривошипно-планетарный поршневой механизм содержит корпус с цилиндром 1, в котором закреплен шток 2, соединенный с поршнем 14. Шток 2 центрируется по оси движения поршня 14 в направляющей штока 13 с возможностью возвратно-поступательного перемещения. Шток 2 имеет шарнирный узел, состоящий из центрального шарнира 3, установленного в нем шарнирного пальца 11 и сферических подшипников 12. По концам шарнирного узла смонтированы планетарные шатуны 4 на сферических подшипниках 12. Планетарные шатуны 4 осями вращения связаны с посадочными гнездами кривошипов 5 и имеют межцентровые расстояния R, равные радиусам кривошипов 5. Кривошипы 5 выполнены соосными и встречно-вращающимися. По оси планетарных шатунов 4 расположены синхронизирующие упоры 9 на расстоянии R, равном радиусу кривошипов 5. Выходной вал 6 расположен с возможностью передачи вращения от правого кривошипа 5 тремя шестернями 7, а вращения от левого кривошипа 5 - двумя шестернями 8 с сохранением передаточного отношения. В корпусе с цилиндром 1 расположены гнезда упоров 10 на расстоянии 2R, равном двум радиусам кривошипов 5. Гнезда упоров 10 расположены на линии, проходящей через центр кривошипов 5 под углом 90° относительно оси движения штока 2.
Работает устройство следующим образом.
При перемещении штока 2 вместе с поршнем 14 в корпусе с цилиндром 1 из верхней мертвой точки (ВМТ) в нижнюю мертвую точку (НМТ) (фиг.2) по направляющей штока 13 планетарные шатуны 4 совершают вращательные движения относительно посадочных гнезд в кривошипах 5, при этом синхронизирующие упоры 9 перемещаются по оси, проходящей через центр кривошипов 5 и перпендикулярной оси движения штока 2. В серединном положении (фиг.3), когда центральный шарнир 3 становится соосным планетарным шатунам 4, синхронизирующие упоры 9 входят в гнезда упоров 10, благодаря чему происходит осевая фиксация планетарных шатунов 4, что предотвращает совместное их вращение с кривошипами 5. При этом происходит перевод суммарной силы, сосредоточенной на центральном шарнире 3, через шарнирный палец 11 и сферические подшипники 12, установленные в посадочные гнезда кривошипов 5, в крутящий момент на встречно-вращающихся кривошипах 5. Далее крутящий момент через три шестерни правого кривошипа 7 и две шестерни левого кривошипа 8 передается на выходной вал 6.
При этом образованная пара кривошип 5 - планетарный шатун 4 сообщает штоку 2 ход, равный учетверенному радиусу кривошипа 5.
Повышение надежности работы механизма, уменьшение износа и увеличение ресурса достигается за счет компенсации предельных отклонений межцентровых расстояний в кривошипах 5 и планетарных шатунах 4 путем применения шарнирного узла, содержащего центральный шарнир 3, шарнирный палец 11 и расположенные на нем сферические подшипники 12 и применения синхронизирующих упоров 9, расположенных на планетарных шатунах 4, и гнезд упоров 10, расположенных в корпусе с цилиндром 1.
Допустимое упрощение технологии изготовления и проведение ремонта механизма достигается благодаря установке в центрах вращения планетарных шатунов 4, кривошипов 5, трех шестерней правого кривошипа 7 и двух шестерней левого кривошипа 8 стандартных подшипников качения массового производства, что упрощает систему смазки механизма, снижает высокие требования к качеству масла и снижает эксплуатационные расходы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОППОЗИТНЫЙ КРИВОШИПНО-ПЛАНЕТАРНЫЙ ПОРШНЕВОЙ МЕХАНИЗМ БЕСШАТУННОГО ТИПА (ВАРИАНТЫ) И СИСТЕМА ОППОЗИТНЫХ КРИВОШИПНО-ПЛАНЕТАРНЫХ ПОРШНЕВЫХ МЕХАНИЗМОВ БЕСШАТУННОГО ТИПА | 2012 |
|
RU2524154C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2157897C2 |
| ШЕСТЕРЕННЫЙ БЕСШАТУННЫЙ МЕХАНИЗМ С МНОГОКОЛЕНЧАТЫМ ВАЛОМ | 2013 |
|
RU2537073C1 |
| Поршневая машина Потапова | 2021 |
|
RU2756798C1 |
| ПОРШНЕВАЯ МАШИНА С БЕСШАТУННЫМ МЕХАНИЗМОМ | 2000 |
|
RU2213227C2 |
| Бесшатунный механизм | 2023 |
|
RU2805423C1 |
| БЕСШАТУННЫЙ МЕХАНИЗМ РОТОРНО-ПОРШНЕВОЙ МАШИНЫ | 2008 |
|
RU2392443C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2237175C2 |
| БЕСШАТУННЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2007 |
|
RU2345259C1 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ И СПОСОБ УСТРАНЕНИЯ ЗАКЛИНИВАНИЯ ЕГО МЕХАНИЗМА | 2012 |
|
RU2538349C2 |
Изобретение относится к машиностроению, в частности к бесшатунным поршневым механизмам. Ромбический кривошипно-планетарный поршневой механизм содержит корпус с цилиндром (1), шток (2), планетарные шатуны (4) и кривошипы (5). Шток (2) закреплен с поршнем (14) и соединен через шарнирный узел с планетарными шатунами (4). Планетарные шатуны (4) связаны с кривошипами (5). Межцентровые расстояния планетарных шатунов (4) равны радиусам кривошипов (5). Выходной вал выполнен с возможностью передачи вращения от правого кривошипа (5) тремя шестернями (7), а от левого кривошипа (5) - двумя шестернями (8) с сохранением передаточного отношения. Шарнирный узел содержит центральный шарнир (3) и закрепленный в нем шарнирный палец (11). Планетарные шатуны (4) имеют синхронизирующие упоры (10). Синхронизирующие упоры (10), расположенные на линии, проходящей через центры вращения планетарных шатунов (5), на расстоянии, равном радиусу кривошипов (5) от центров вращения планетарных шатунов (4). Гнезда упоров (10) расположены в корпусе, на линии, проходящей через центры вращения кривошипов (5) на расстоянии, равном двум радиусам кривошипов (5). Линия расположения гнезд упоров перпендикулярна оси движения штока (2). Планетарные шатуны (4) могут быть связаны с кривошипами (5) через посадочные гнезда. Шарнирный узел может дополнительно содержать сферические подшипники (12). Кривошипы (5) могут быть выполнены соосными и встречно-вращающимися. Технический результат заключается в повышении надежности механизма и в упрощении технологии изготовления. 4 з.п. ф-лы, 3 ил.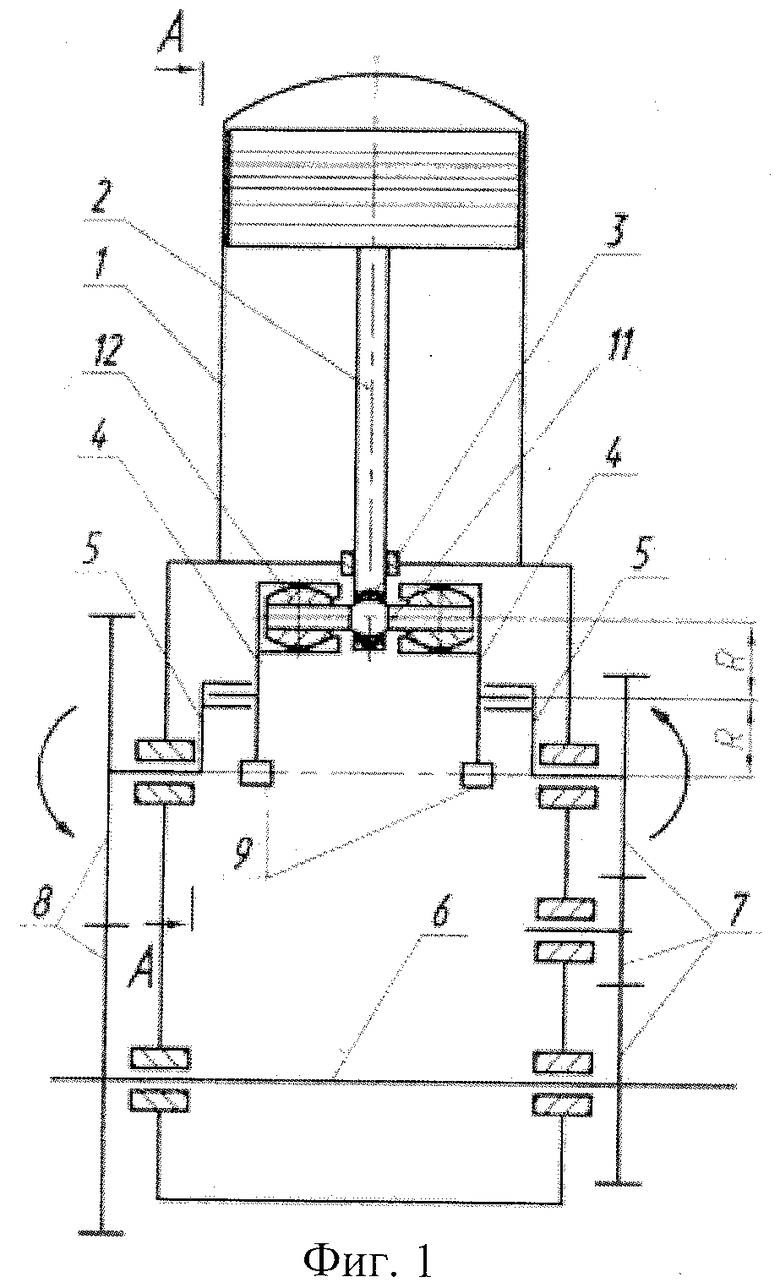
1. Ромбический кривошипно-планетарный поршневой механизм, включающий корпус с цилиндром, в котором расположен шток с закрепленным на нем поршнем, соединенный через шарнирный узел с планетарными шатунами, связанными с кривошипами, причем межцентровые расстояния планетарных шатунов равны радиусам кривошипов, выходной вал с возможностью передачи вращения от правого кривошипа тремя шестернями, и от левого кривошипа - двумя шестернями с сохранением передаточного отношения, отличающийся тем, что шарнирный узел содержит центральный шарнир и закрепленный в нем шарнирный палец, а планетарные шатуны имеют синхронизирующие упоры, расположенные на линии, проходящей через центры вращения планетарных шатунов, на расстоянии, равном радиусу кривошипов от центров вращения планетарных шатунов, а в корпусе расположены гнезда упоров на линии, проходящей через центры вращения кривошипов на расстоянии, равном двум радиусам кривошипов, и перпендикулярной оси движения штока.
2. Ромбический кривошипно-планетарный поршневой механизм по п.1, отличающийся тем, что планетарные шатуны связаны с кривошипами через посадочные гнезда.
3. Ромбический кривошипно-планетарный поршневой механизм по п.1, отличающийся тем, что шарнирный узел дополнительно содержит сферические подшипники, установленные в посадочные гнезда планетарных шатунов.
4. Ромбический кривошипно-планетарный поршневой механизм по п.1, отличающийся тем, что в центрах вращения планетарных шатунов, кривошипов, трех шестерней правого кривошипа и двух шестерней левого кривошипа установлены подшипники качения.
5. Ромбический кривошипно-планетарный механизм по п.1, отличающийся тем, что кривошипы выполнены соосными и встречно-вращающимися.
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2157897C2 |
| КРИВОШИПНО-КОРОМЫСЛО-ШАТУННЫЙ МЕХАНИЗМ | 2006 |
|
RU2348822C2 |
| АППАРАТУРА И СПОСОБ ОЦЕНКИ ОБЪЕМА КОДА, А ТАКЖЕ НОСИТЕЛЬ ИНФОРМАЦИИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2420911C1 |
| DE 3930263 A1, 15.04.1993 | |||
| US 5167208 A, 01.12.1992. | |||

