Область техники, к которой относится изобретение
Изобретение относится к области машиностроения и может быть использовано в конструкциях поршневых двигателей внутреннего сгорания (ДВС) и компрессоров, а также во всех механизмах преобразования возвратно-поступательного движения во вращательное и наоборот.
Уровень техники
Поршневые ДВС с кривошипно-шатунным механизмом характеризуются повышенной работой сил трения из-за бокового давления поршня на стенки цилиндра. Известно, что радикальным способом уменьшения такого давления является применение в ДВС бесшатунного силового механизма (БСМ) для передачи механической энергии от поршня к коленчатому валу двигателя как в [1,2], когда два противоположных поршня связывались общим штоком.
В основе большинства технических решений в области БСМ лежит использование теоремы Коперника [3]: «точка окружности, катящейся без скольжения по внутренней стороне окружности вдвое большего радиуса, движется по диаметру неподвижной окружности». В данном случае отрезок прямой (диаметр) представляет собой вырожденную гипоциклоиду с двумя заострениями (каспами). В качестве указанных окружностей используют делительные окружности шестерен внешнего (колесо) и внутреннего зацепления. При этом малая шестерня (сателлит) свободно вращается на шейке кривошипа, называемого опорным, радиусом 1/4 от диаметра делительной окружности неподвижной шестерни внутреннего зацепления. В зависимости от назначения БСМ (двигатель/компрессор) с опорного кривошипа осуществляется отбор/подвод мощности. Сателлит является носителем второго кривошипа, называемого поводковым, такого же радиуса, что и у опорного. Таким образом штоковая цапфа, через которую передается поступательное движение штока, находится на делительной окружности сателлита.
Наличие зубчатого зацепления в БСМ существенно ограничивает величину передаваемой мощности, т.к. высокие контактные напряжения зубьев не способствуют долговечной работе механизма.
Известен бесшатунный механизм [4], в котором сателлит, жестко связанный с поводковым кривошипом, является двух- трехзубой шестерней, профиль которой может быть круговым или эллиптическим (см. Фиг. 1). Радиус кривизны таких зубьев оказывается в несколько раз большим, чем в случае зубьев обычного эвольвентного зацепления. Это приводит к снижению контактных напряжений и повышению надежности механизма. Однако другим негативным фактором снижения кривизны зубьев является увеличенная доля трения скольжения в формировании потерь механической энергии в такой передаче. Указанную пару можно рассматривать как циклоидальную понижающую передачу - редуктор с передаточным отношением 2:1, если освободить шестерню внутреннего зацепления и обеспечить прокат колеса, совершающего орбитальное движение при поддержке трех эксцентриков.
Известны циклоидальные передачи с промежуточными телами вращения - роликами [5]. Такие передачи характеризуются малыми потерями на трение, однако областью их применения являются редукторы с передаточными отношениями существенно больше 2.
Известен подшипниковый редуктор [6], в котором внешнее кольцо имеет внутреннюю криволинейную поверхность, выполненную по укороченной гипоциклоиде с четырьмя каспами. По этой поверхности прокатываются три шарика/ролика, с диаметром таким, что их периметр в 4 раза меньше периметра гипоциклоиды. Такое соотношение размеров и профиля позволяет получить редуктор с передаточным отношением 2:1. Однако эти же соотношения размеров налагают ограничения и на размеры однозубого колеса - эксцентрика, что не позволяет использовать его в качестве конструктивной основы БСМ.
Известен циклоидальный редуктор и способ его расчета [7], который представляет класс передач чисто с трением качения. Показано, что корректировкой профиля укороченной гипоциклоиды внешней шестерни можно обеспечить передачу мощности через промежуточные тела вращения (ролики) без проскальзывания. Показаны варианты передачи с 5, 10, 15 и 20 роликами и, в частности, показан эскиз пары с двузубым колесом и внешней шестерней с 4 каспами, что означает возможность использования трех роликов, обеспечивающих передаточное отношение 2:1.
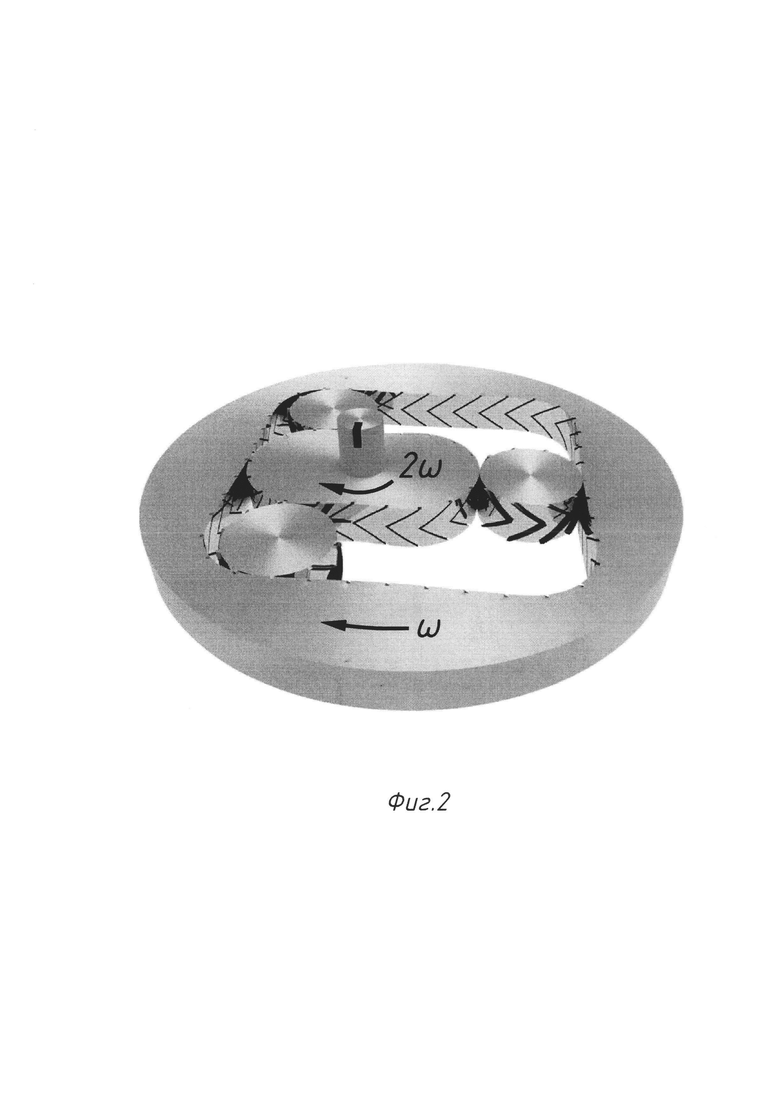
Известна механическая зубчатая передача, в которой практически исключено трение скольжения за счет взаимодействия шестерен посредством промежуточных агентов в виде тел вращения - роликов, подобных тем что используются в подшипниках [8]. Автором, Т. Dobroth, утверждается, что создана новая парадигма зубчатых механизмов, названная Motion Specialized Bearings ("Специализированные подшипники движения"). В частности, предложен механизм с передаточным отношением 2:1, содержащий ведущую двузубую шестерню внешнего зацепления и ведомую шестерню внутреннего зацепления с четырьмя впадинами (каспами), которые взаимодействуют посредством трех роликов (см. Фиг. 2). Для исключения проскальзывания на поверхности роликов размещены шевронные зацепы, которые взаимодействуют с шевронными впадинами на колесе и на внешней шестерне. Работоспособность такого зацепления подтверждается компьютерной моделью (анимацией), однако обеспечить ее технологически на поверхностях с переменной кривизной, отличающейся на два порядка, не представляется возможным.
Известен циклоидальный планетарный редуктор [9], в котором для исключения проскальзывания между роликами и поверхностями внутренней и внешней циклоидальных шестерен на их периферии размещены мелкомодульные зубья эвольвентного или кругового профиля. Эти зубья не участвуют в передаче нагрузки, а только обеспечивают стабильность конфигурации передачи, что позволяет отказаться от сепаратора (рамки) для размещения роликов.
Альтернативой мелкомодульной зубчатой передаче может служить применение передачи с зацеплением через шарики, примером которой могут служить решения [10, 11]. Однако в БСМ такие шарики не будут участвовать в передаче нагрузки, а только обеспечивать взаимное позиционирование роликов. Выполнение полусферических лунок на поверхностях колеса и шестерни не является технологической проблемой.
Указанный в [4] бесшатунный механизм в сочетании с принципами [8] по совокупности признаков наиболее близких к совокупности существенных признаков изобретения может быть выбран в качестве прототипа.
Целью изобретения является повышение эффективности ДВС и других поршневых машин, в которых осуществляется преобразование возвратно-поступательного движения поршней во вращательное движение кривошипа и наоборот.
Раскрытие изобретения Поставленная цель достигается тем, что в известном бесшатунном механизме, содержащем шарнирно соединенные опорный и поводковый кривошипы с радиусами вращения равными одной четвертой части хода прямолинейно движущегося штока, имеющем штоковую цапфу, связанную как минимум с одним упомянутым штоком, а также средство синхронизации движения опорного и поводкового кривошипов в виде планетарной зубчатой передачи, сателлитом которой является двузубое колесо неэвольвентного профиля, а неподвижная шестерня имеет четыре впадины, используется средство синхронизации движения опорного и поводкового кривошипов в виде циклоидальной планетарной передачи, сателлит которой имеет профиль модифицированной эпициклоиды с двумя заострениями-выступами, а неподвижная шестерня имеет профиль модифицированной гипоциклоиды с четырьмя заострениями-впадинами, при этом взаимодействие сателлита с неподвижной шестерней осуществляется посредством трех промежуточных тел вращения -роликов, периметр которых в два раза меньше периметра профиля сателлита и в четыре раза меньше периметра профиля неподвижной шестерни.
Отличием заявляемого бесшатунного механизма от прототипа является полное исключение трения скольжения при взаимодействии сателлита с неподвижной (опорной) шестерней за счет использования промежуточных тел вращения - роликов.
В устройстве прототипа в качестве производящей (подвижной) окружности выступает делительная окружность сателлита, который ведомый опорным кривошипом, обкатывается без скольжения относительно делительной окружности (вдвое большего диаметра) неподвижной шестерни. При этом точка, лежащая на производящей окружности, за один оборот опорного кривошипа описывает гипоциклоиду, вырожденную в отрезок прямой, что и составляет основу применения данного механизма в БСМ.
Известно [3], что при обкатывании производящей окружности по неподвижной (направляющей) окружности в четыре раза большего диаметра, точка, лежащая на конце радиус-вектора производящей окружности описывает гипоциклоиду с четырьмя заострениями - астроиду. Если производящую точку переместить на середину указанного радиус-вектора (коэффициент укорочения 0,5), то получится укороченная гипоциклоида (тип 1) с четырьмя заострениями-впадинами. Такая же по форме гипоциклоида (тип 2) может быть получена, если производящая окружность имеет диаметр в 3/4 от диаметра направляющей окружности, а производящая точка вынесена за пределы производящей окружности на величину ее радиуса (коэффициент укорочения 2). Если диаметр направляющей окружности для типа 1 в два раза больше диаметра направляющей окружности для типа 2, то получаемые гипоциклоиды конгруэнтны (совпадают при наложении). Если для формирования гипоциклоиды типа 1 необходим один оборот производящей окружности, то для гипоциклоиды типа 2 необходимы три оборота производящей окружности вокруг центра симметрии (оси вращения опорного кривошипа). Указанная гипоциклоида в рамках заявленного изобретения может быть названа базовым профилем.
Базовый профиль имеет форму близкую к квадрату с скругленными вершинами, в которых радиус кривизны меньше 0,4 радиуса производящей окружности. Если радиус производящей окружности обозначить r, диаметр окружности вписанной в базовый профиль составит 5r, а диаметр описанной окружности составит 7r.
Для того, чтобы сателлит делал два оборота за один оборот опорного кривошипа, ролик должен обкатываться вокруг сателлита за два полных оборота, а профиль неподвижного колеса должен обкатываться роликом за четыре полных оборота. Но те же четыре оборота делает производящая окружность при формировании укороченной гипоциклоиды по типу 1.
Для того, чтобы ролик радиуса r касался профиля неподвижного колеса в точках заострения необходимо модифицировать базовый профиль, увеличив радиус кривизны в этих точках до значений больших или равных r. Одновременно с этим произойдет коррекция и других участков профиля, вплоть до приближения их к отрезкам прямых. Важно, чтобы периметр модифицированного профиля оставался в четыре раза большим периметра ролика. Ширина модифицированного профиля в форме квадрата с скругленными вершинами радиусом r определяется как г (1,5π-+2)=6,7r, что соответствует интервалу [5r, 7r].
Чтобы сателлит мог передавать крутящий момент его профиль не может быть круговым, и только четыре нормали к профилю могут проходить через центр (ось) его вращения. Этому требованию соответствует укороченная эпициклоида с двумя заострениями (выступами) и необходимо подобрать коэффициент укорочения, при котором ее периметр будет ровно в два раза больше периметра ролика, максимальный продольный размер порядка 4,71r, а максимальный поперечный размер порядка 2,71r. Однако и этот профиль сателлита требуется модифицировать, а приемлемый результат достигается при сопряжении двух дуг радиусом 1,355r, разнесенных на расстояние 2r. Приближенная оценка периметра такого профиля возможна при условии, что указанные дуги являются полуокружностями: (2,71π-+4)r. Не трудно видеть, что (2,71π+4)=12,5137 незначительно отличается от An - 12,5663, что подтверждает отношение периметров сателлита и ролика как 2:1. В действительном профиле сателлита дуги должны быть продолжены за пределы полуокружностей и сопряжены дугой большего радиуса. Точная корректировка профилей сателлита и неподвижного колеса возможна на основе математического подхода, изложенного в [7].
Межцентровое расстояние для трех роликов не является постоянным за оборот опорного кривошипа, поэтому ролики не могут быть охвачены каким-либо сепаратором, тем более, что поверхность такого сепаратора четырежды за оборот опорного кривошипа пересекалась бы сателлитом, так как он периодически (4 раза) входит в контакт с неподвижным колесом.
Как минимум один ролик всегда участвует в передаче нагрузки и все ролики имеют контакт одновременно с сателлитом и с неподвижным колесом, поэтому нет причин специально позиционировать ролики относительно друг друга и относительно сателлита и неподвижного колеса. Однако с учетом возможного износа или технологических погрешностей допускается незначительное изменение геометрии передачи. Чтобы исключить неконтролируемое движение роликов может быть применена вспомогательная связь звеньев с помощью шариковой передачи. Для этого на поверхности каждого ролика выполняются с постоянным шагом углубления, в которые закладываются шарики на глубину немногим больше радиуса шарика, а кромка углубления завальцовывается или зачеканивается, чтобы исключить выпадение шарика из углубления. На поверхности сателлита и неподвижного колеса выполняются полусферические углубления с линейным шагом, таким же как и на ролике. Так как периметры звеньев кратно связаны, то на поверхности сателлита будет лунок в два раза больше, а на поверхности неподвижного колеса в четыре раза больше, чем шариков на одном ролике. Шариковые передачи доказали свою работоспособность под нагрузкой, а в данном случае шариковая передача является ненагруженной и выполняет только функцию стабилизации конфигурации передачи.
Таким образом в заявляемом бесшатунном механизме исключены потери энергии на трение скольжения (кроме шарниров), что повышает эффективность и надежность БСМ.
Краткое описание чертежей
На Фиг. 1 показана схема бесшатунного механизма прототипа.
На Фиг. 2 изображена циклоидальная передача с передаточным отношением 2:1 с промежуточными телами качения.
На Фиг. 3 показана схема бесшатунного механизма на основе планетарной передачи с промежуточными телами вращения.
На Фиг. 4 показаны фазы движения звеньев бесшатунного механизма на первом полуобороте опорного кривошипа (прямой ход штока).
На Фиг. 5 показаны фазы движения звеньев бесшатунного механизма на втором полуобороте опорного кривошипа (обратный ход штока).
На Фиг. 6 показана зависимость смещения штока от угла поворота опорного кривошипа.
На Фиг. 7 изображение сателлита в аксонометрической проекции.
Осуществление изобретения
Изобретение может быть осуществлено в виде устройства, изображенного на Фиг. 3. Осуществление изобретения предполагает использование планетарной передачи с промежуточными телами вращения - роликами 7 (3 шт.) для синхронизации движения опорного кривошипа 1 и поводкового кривошипа 2, т.е. для исключения их совместного проворота в момент совпадения оси штоковой цапфы 5 и оси вращения опорного кривошипа 1. Двузубое колесо - сателлит 6 совершает орбитальное движение вокруг оси вращения опорного кривошипа 1 и четырежды за его оборот касается профиля неподвижной шестерни 8. Центр штоковой цапфы 5 перемещается строго по прямой, что исключает поперечную (боковую) нагрузку на шток 3. Профиль сателлита 6 имеет достаточно большую ширину, что позволяет увеличивать диаметры опорной цапфы 4 и штоковой цапфы 5, настолько, что их контуры пересекаются, чем обеспечивается высокая жесткость конструкции.
Пример возможной реализации предлагаемого БСМ
Исходные данные:
1. Ход штока - 80 мм
2. Радиус опорного кривошипа - 20 мм
3. Радиус поводкового кривошипа - 20 мм
4. Диаметр ролика - 40 мм
5. Диаметр опорной цапфы - 28 мм
6. Диаметр штоковой цапфы - 28 мм
На Фиг. 3 показаны контуры опорной цапфы 4 и штоковой цапфы 5. Выбранный диаметр является условным и требует расчета исходя из действующих на шток 3 нагрузок.
С целью стабилизации конфигурации передачи в части взаимного позиционирования неподвижной шестерни 8, роликов 7 и сателлита 6 применена вспомогательная передача с шариковым зацеплением. Для определенности принят диаметр шарика 2 мм, но он должен выбираться исходя из технологических возможностей оборудования. На поверхности каждого ролика 7 размещено 10 шариков, а на поверхностях сателлита 6 и неподвижной шестерни 8 выполнены полусферические лунки в количестве 20 и 40 соответственно. В момент заполнения шариком лунки происходит контакт по линии между поверхностями сателлита 6 и ролика 7, другого ролика 7 и неподвижной шестерни 8. Нагрузки, действующие по линии контакта направлены по нормали к поверхностям, а значит плоскость действия нагрузок проходит через центр шарика. Таким образом шариковая передача разгружена от передачи крутящего момента.
На Фиг. 6 представлена зависимость хода штока 3 от угла поворота опорного кривошипа 1. По форме и математическому содержанию эта зависимость соответствует косинусоиде, а это значит, что зависимости скорости и ускорения штока также будут гармоническими функциями угла поворота опорного кривошипа. Таким образом реализуется одно из преимуществ БСМ перед кривошипно-шатунным механизмом, состоящим в отсутствии ускорений 2-го порядка, поскольку уравновешивание сил инерции 2-го порядка в ДВС представляет собой сложную техническую задачу.
На Фиг. 7 показан вид сателлита 6 в аксонометрической проекции.
Заявляемое техническое решение обеспечивает создание надежного бесшатунного механизма, у которого отсутствуют потери энергии на трение скольжения, а прочностные характеристики превышают таковые для известных механизмов синхронизации с шестернями эвольвентного и других типов зацепления.
Бесшатунный механизм может найти широкое применение в конструкциях поршневых ДВС, поршневых компрессоров, в устройствах преобразования возвратно-поступательного движения во вращательное и наоборот.
Заявляемое техническое решение соответствует требованию промышленной применимости и возможно в реализации на стандартном технологическом оборудовании с использованием современных методов металлообработки.
Источники информации:
1. Бесшатунные двигатели внутреннего сгорания. Баландин С.С., М., «Машиностроение», 1972, 176 с.
2. А.с. СССР №118471, 10.12.1973
3. Циклоида. Берман Г.Н., М.: Наука, 1980, 112 с, стр. 61
4. RU 2256798, 2003
5. RU 2319051, 2008
6. CN103016677, 2013
7. CN103277464, 2016
8. https://www.21 geometry.com
9. CN101818782, 2012
10. SU 1337589, 1987
11. RU 2272196, 2006
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухтактный поршневой двигатель внутреннего сгорания | 2022 |
|
RU2787437C1 |
| БЕСШАТУННЫЙ МЕХАНИЗМ | 2003 |
|
RU2256798C2 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2023 |
|
RU2800201C1 |
| БЕСШАТУННЫЙ МЕХАНИЗМ | 2003 |
|
RU2256799C2 |
| ПЕРИСТАЛЬТИЧЕСКИЙ НАСОС | 1994 |
|
RU2067219C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| БЕСШАТУННЫЙ ПЛАНЕТАРНО-КРИВОШИПНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ С УКОРОЧЕННЫМ ШТОКОМ (ВАРИАНТ 4-Й) | 2005 |
|
RU2430249C2 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2011 |
|
RU2475665C1 |
| Механизм перемещения иглы швейной машины | 1989 |
|
SU1656023A1 |
| БЕСШАТУННЫЙ ПЛАНЕТАРНО-КРИВОШИПНЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ (ВАРИАНТ 3-Й) | 2005 |
|
RU2398121C2 |





Изобретение относится к области машиностроения, а более конкретно к преобразованию возвратно-поступательного движения во вращательное и наоборот. Бесшатунный механизм содержит шарнирно соединенные опорный и поводковый кривошипы, штоковую цапфу, связанную как минимум с одним штоком, а также средство синхронизации движения опорного и поводкового кривошипов в виде планетарной зубчатой передачи, сателлитом которой является двузубое колесо неэвольвентного профиля, а неподвижная шестерня имеет четыре впадины. При этом средством синхронизации движения опорного и поводкового кривошипов является циклоидальная планетарная передача. Сателлит имеет профиль модифицированной эпициклоиды с двумя заострениями-выступами. Неподвижная шестерня имеет профиль модифицированной гипоциклоиды с четырьмя заострениями-впадинами. Взаимодействие сателлита с неподвижной шестерней осуществляется посредством трех промежуточных тел вращения – роликов. Периметр роликов в два раза меньше периметра профиля сателлита и в четыре раза меньше периметра профиля неподвижной шестерни. Достигается исключение трения скольжения. 3 з.п. ф-лы, 7 ил.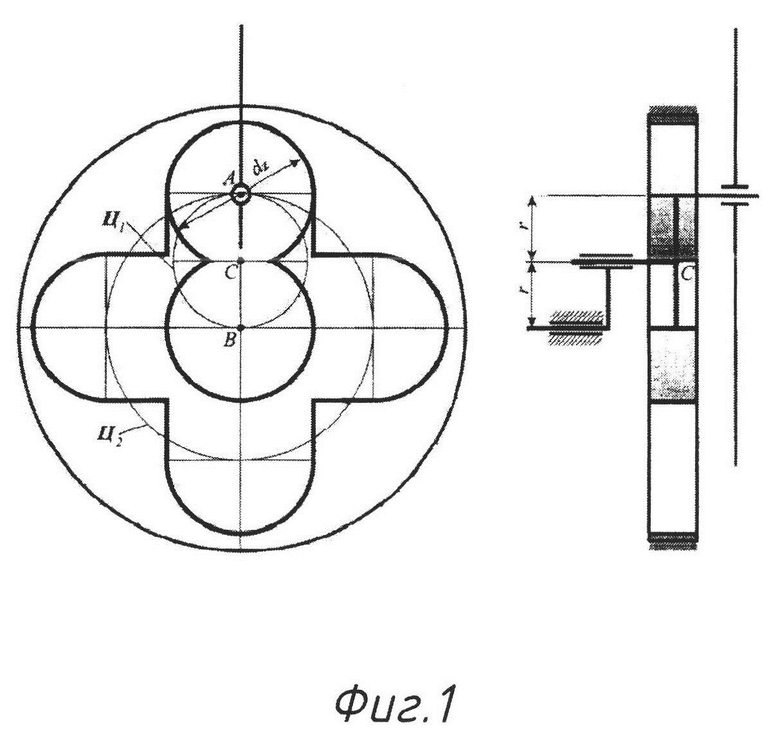
1. Бесшатунный механизм, содержащий шарнирно соединенные опорный и поводковый кривошипы с радиусами вращения, равными одной четвертой части хода прямолинейно движущегося штока, имеющий штоковую цапфу, связанную как минимум с одним штоком, а также средство синхронизации движения опорного и поводкового кривошипов в виде планетарной зубчатой передачи, сателлитом которой является двузубое колесо неэвольвентного профиля, а неподвижная шестерня имеет четыре впадины, отличающийся тем, что средством синхронизации движения опорного и поводкового кривошипов является циклоидальная планетарная передача, сателлит которой имеет профиль модифицированной эпициклоиды с двумя заострениями-выступами, а неподвижная шестерня имеет профиль модифицированной гипоциклоиды с четырьмя заострениями-впадинами, при этом взаимодействие сателлита с неподвижной шестерней осуществляется посредством трех промежуточных тел вращения - роликов, периметр которых в два раза меньше периметра профиля сателлита и в четыре раза меньше периметра профиля неподвижной шестерни.
2. Бесшатунный механизм по п. 1, отличающийся тем, что промежуточные тела вращения - ролики имеют шариковое зацепление с сателлитом и неподвижной шестерней, на поверхности которых размещены полусферические лунки, а на поверхности роликов размещены с равным шагом шарики, выступающие над поверхностью ролика как полусфера, того же радиуса, что и лунки.
3. Бесшатунный механизм по п. 2, отличающийся тем, что равномерное размещение лунок на поверхности сателлита и неподвижной шестерни производится с шагом, при котором количество лунок на сателлите в два раза больше, а количество лунок на неподвижной шестерне в четыре раза больше, чем шариков на одном ролике.
4. Бесшатунный механизм по пп. 1, 2, отличающийся тем, что шарики и лунки лежат в одной плоскости, перпендикулярной оси вращения опорного кривошипа и проходящей через середину высоты ролика.
| БЕСШАТУННЫЙ МЕХАНИЗМ | 2003 |
|
RU2256798C2 |
| US 9267583 B2, 23.02.2016 | |||
| ШАРИКОВОЕ ЗАЦЕПЛЕНИЕ ДЛЯ ПЕРЕДАЧИ ВРАЩЕНИЯ | 2004 |
|
RU2272196C2 |
| Синусошариковый редуктор | 1985 |
|
SU1337589A1 |
