Изобретение относится к измерительному преобразователю вибрационного типа, в частности для применения в кориолисовых измерителях массового расхода.
Для определения массового расхода среды, текущей в трубопроводе, в частности жидкости или другого флюида, часто применяются такие приборы, которые с помощью измерительного преобразователя вибрационного типа и присоединенной к нему управляющей и обрабатывающей электроники способствуют возникновению во флюиде кориолисовых сил и создают измерительный сигнал, представляющий массовый расход.
Такие измерительные преобразователи, в частности их применение в кориолисовых измерителях массового расхода, уже известны длительное время и применяются в промышленном масштабе. Так, например, в DE-A 102004023600, US-В 6666098, US-B 6477902, US-A 5705754, US-A 5549009 или US-А 5287754 описываются кориолисовы измерители массового расхода с соответственно измерительным преобразователем вибрационного типа, причем измерительный преобразователь реагирует на массовый расход среды, текущей в трубопроводе, и включает корпус преобразователя, а также расположенную в корпусе преобразователя внутреннюю часть. Внутренняя часть имеет, по меньшей мере, одну изогнутую, при работе, по меньшей мере, периодически вибрирующую измерительную трубу для пропуска среды, а также зафиксированное со стороны впуска на измерительной трубе при образовании первой зоны сопряжения и со стороны выпуска на измерительной трубе при образовании второй зоны сопряжения уравновешивающее устройство, которое при работе находится в основном в состоянии покоя или создает колебания относительно трубы, равные по частоте, но обратные по фазе. Далее внутренняя часть с помощью, по меньшей мере, двух соединительных трубчатых элементов закреплена в корпусе преобразователя со способностью колебаться, через которые измерительная труба при работе соединяется с трубопроводом.
Изогнутые, например, имеющие форму U-, V,- Ω, вибрирующие измерительные трубы могут, как известно, если в них возбуждены изгибные колебания согласно первой форме собственных колебаний, способствовать возникновению в текущей среде кориолисовых сил. В качестве первой формы собственных колебаний измерительной трубы у подобного рода измерительных преобразователей обычно выбирается та форма собственных колебаний, при которой измерительная труба колеблется при самой низкой природной резонансной частоте вокруг виртуальной продольной оси измерительного преобразователя, по виду закрепленной с одного конца консоли. Созданные таким образом в текущей среде кориолисовы силы опять же ведут к тому, что на возбужденные маятниковые движения консоли так называемой полезной моды накладываются с равной частотой изгибные колебания согласно, по меньшей мере, второй форме собственных колебаний. У измерительных преобразователей описанного вида эти консольные колебания, вызванные кориолисовых силами, соответствуют так называемой кориолисовой моде, обычно той форме собственных колебаний, при которой измерительная труба выполняет крутильные колебания вокруг воображаемой вертикальной оси земной системы координат, ориентированной перпендикулярно к продольной оси. Благодаря наложению полезной и кориолисовых мод колебания измерительной трубы, зарегистрированные с помощью системы датчиков на стороне впуска и стороне выпуска, имеют зависящую от массового потока, измеряемую разность фаз.
Часто измерительные трубы подобных, к примеру, применяющихся в измерительных преобразователях кориолосовых измерителей массового расхода возбуждаются при работе на мгновенную резонансную частоту первой формы собственных колебаний, в частности, при постоянно регулируемой амплитуде колебаний. Так как эта резонансная частота, в частности, зависит также от мгновенной плотности среды, например, с помощью имеющихся на рынке кориолисовых измерителей массового расхода наряду с массовым расходом может измеряться также плотность текущей среды.
Преимущество изогнутой формы трубы состоит в том, что вследствие термически обусловленного расширения, в частности, даже при применении измерительных труб с высоким коэффициентом теплового расширения, в самой измерительной трубе и/или в присоединенном трубопроводе не возникают вообще или возникают только очень низкие механические напряжения. Другое преимущество изогнутой измерительной трубы следует также усматривать в том, что измерительная труба выполнена относительно длинной, и следовательно, может достигаться высокая чувствительность измерительного преобразователя к подлежащему измерению массовому расходу при относительно короткой длине встройки и при относительно низкой энергии задающего генератора. Эти обстоятельства позволяют изготавливать измерительную трубу из материалов с высоким коэффициентом теплового расширения и/или высоким модулем упругости, к примеру из нержавеющей стали. В сравнении к этому у измерительных преобразователей вибрационного типа с прямой измерительной трубой, последняя для исключения осевых напряжений и достижения достаточной чувствительности измерений обычно изготавливается из материала, который имеет, по меньшей мере, более низкие коэффициенты теплового расширения и при случае также более низкий модуль упругости. В связи с этим для этого случая предпочтительно применяются измерительные трубы из титана или циркония, которые, однако, из-за высокой стоимости материала и обычно высоких затрат на обработку в изготовлении значительно дороже, чем трубы из нержавеющей стали. К тому же измерительный преобразователь с одной измерительной трубой по сравнению с известными измерительными преобразователями с двумя параллельными измерительными трубами для потока жидкости имеет другое большое преимущество в том, что не требуются распределительные элементы, служащие присоединению измерительной трубы с трубопроводом. С одной стороны, такие распределительные элементы требуют затрат при их изготовлении и, с другой стороны, представляют собой пропускные элементы с выраженной склонностью к образованию накипи или закупорке.
На основании большей частью скорее узкой ширины полос от уравновешивающих устройств измерительные преобразователи с одной изогнутой измерительной трубой при применении в среде, у которой плотность изменяется в широком диапазоне, правда, часто имеют недостаток, в частности в сравнении с такими же измерительными преобразователями с двумя параллельными измерительными трубами, заключающийся в том, что вследствие дисбаланса внутренней части, изменяющегося с плотностью, нулевая точка измерительного преобразователя и, следовательно, точность измерения соответствующего расположенного линейно измерительного прибора существенно колеблется и в такой же степени может соответственно уменьшаться. Это может быть обосновано тем, что с помощью, в общем, единственного уравновешивающего устройства не могут быть полностью нейтрализованы и могут распространяться далеко по присоединенному трубопроводу такие поперечные силы, которые индуцируются в измерительном преобразователе на основе взаимных латеральных движений единственной измерительной трубы, через которую осуществляется поток среды и которые скорее широкополосны вследствие сильно изменяющейся плотности среды в сравнении с противодействием, создаваемым со стороны уравновешивающего устройства. Такие остаточные поперечные силы опять же могут вести к тому, что упомянутая выше внутренняя часть, совокупно колеблясь вокруг продольной оси измерительного преобразователя, начнет совершать латеральные колебания. Эти латеральные колебания внутренней части вызывают соответственно этому также дополнительную упругую деформацию соединительного трубчатого элемента и могут вызывать в итоге нежелательную вибрацию в присоединенном трубопроводе. Кроме того, на основе таких латеральных колебаний внутренней части даже в случае, когда в измерительной трубе отсутствует поток среды, возбуждаются очень подобные кориолисовой моде, во всяком случае, имеющие одинаковую частоту и, таким образом, практически неотличимые от нее консольные колебания, что опять же может сделать непригодным измерительный сигнал, отображающий массовый расход.
Это имеет место также у измерительных преобразователей, которые, например, устроены по принципу, предложенному в US-A 5705574 или US-A 5287754. В описанных там измерительных преобразователях пытаются уберечься от поперечных сил, колеблющихся скорее со средней или высокой частотой, созданных со стороны вибрирующей единственной измерительной трубы, с помощью единственного, в сравнении с измерительной трубой более тяжелого, тем не менее, в сравнении с измерительной трубой настроенного на более высокую частоту уравновешивающего устройства и при необходимости относительно мягкого присоединения измерительной трубы к трубопроводу, т.е практически с помощью механического фильтра низких частот. Однако при этом неблагоприятным образом повышается масса уравновешивающего устройства, необходимая для достаточно значительного демпфирования поперечных сил по сравнению с номинальным внутренним диаметром трубы. Это представляет собой большой недостаток для таких измерительных преобразователей с высоким номинальным диаметром, так как применение таких массивных конструктивных частей повышает именно затраты на монтажные работы как при изготовлении, так и при встройке измерительного прибора в трубопровод. Кроме того, только при очень больших затратах может быть обеспечено, чтобы становящаяся все более низкой при увеличивающейся массе самая низкая собственная частота измерительного преобразователя лежала как прежде далеко от также более низкой собственной частоты присоединенного трубопровода. Таким образом, применение подобного рода измерительного преобразователя в промышленно применяемых встраиваемых измерительных приборах описанного вида, например кориолисовых измерителях массового расхода, до сих пор скорее ограничивается относительно небольшими внутренними диаметрами измерительных труб до примерно 10 мм. Измерительные преобразователи описанного выше вида в остальном предлагаются на рынке заявителями с серийным обозначением "PROMASS А" для номинального диапазона внутреннего диаметра 1-4 мм и зарекомендовали себя, в частности, при небольших скоростях потока и/или высоком давлении.
Напротив, у измерительных преобразователей, представленных в US-B 6666098, US-В 6477902 или 5549009, оба соединительных трубчатых элемента - здесь в основном прямых - ориентированы друг к другу и к виртуальной продольной оси измерительного преобразователя так, что образованная с помощью измерительной трубы и уравновешивающего устройства, а также соответствующим образом установленными в ней задающими генераторами колебаний и датчиками колебаний внутренняя часть может при работе качаться вокруг продольной оси. Говоря по-другому, вся внутренняя часть при работе может совершать маятниковые движения вокруг продольной оси L, обусловленные, в частности, зависящим от плотности дисбалансом между измерительной трубой 10 и уравновешивающим устройством 20, которые в зависимости от проявления дисбаланса синфазны с консольными колебаниями измерительной трубы или консольными колебаниями уравновешивающего устройства 20. При этом жесткость на кручение соединительных трубчатых элементов преимущественно так согласована друг с другом и внутренней частью, которую несут оба элемента, что последняя подвешена в основном с мягким вращением вокруг продольной оси.
Это достигается в измерительном преобразователе в US-В 6666098, например, за счет того, что жесткость на кручение соединительных трубчатых элементов определена таким образом, что соответствующая собственная частота крутильного вибратора со стороны впуска и стороны выпуска, который образован с помощью соответствующего соединительного трубчатого элемента и принадлежащей массовой доле внутренней части, совершающей на стороне конца вращательные колебания вокруг продольной оси, которую подлежит считать в широкой степени жесткой и существенно стабильной по форме, соответственно лежит в области частоты колебаний, колеблющейся в полезной моде измерительной трубы. К тому же, по меньшей мере, у предложенного согласно US-В 6666098 измерительного преобразователя измерительная труба и уравновешивающее устройство так согласованы друг с другом, что они, по меньшей мере, в полезной моде колеблются примерно в одинаковой резонансной частоте. Измерительные преобразователи описанного выше вида предлагаются, впрочем, собственно заявителями с серийным обозначением "PROMASS Н" для номинального диапазона номинального внутреннего диаметра 8-50 мм и зарекомендовали себя там, в частности, при применении с изменяющейся в значительной степени при работе плотностью среды. Маятниковое движение внутренней части особенно проявляется или, по меньшей мере, становится благоприятным благодаря тому, что как отстоящий от виртуальной продольной оси центр тяжести массы измерительной трубы, так и отстоящий от виртуальной продольной оси центр тяжести массы уравновешивающего устройства лежат в общей области измерительного преобразователя, натянутой от виртуальной продольной оси и измерительной трубы. Проведенные далее исследования между тем показали, что точка нуля измерительного преобразователя названного выше рода при очень малых скоростях массового расхода и средах с плотностью, существенно отклоняющейся от калиброванной эталонной плотности, как и прежде может подвергаться значительным колебаниям. Экспериментальные исследования на измерительных преобразователях с конфигурацией согласно US-B 6666098, у которых - как предлагалось - было применено сравнительно более тяжелое уравновешивающее устройство, позволили определить, что хотя и можно было бы достигнуть определенного повышения стабильности точки нуля и в этом отношении повышения точности измерений с помощью встроенного измерительного прибора описанного вида, однако скорее в недостаточной мере. Во всяком случае, возможное повышение точности измерений при предложенных в US-B 6666098 конфигурациях практически может быть достигнуто только согласившись с недостатками, о которых велась дискуссия относительно US-A 5705754 или US-А 5287754.
К тому же для возможного улучшения динамических колебательных свойств у показанных в US-B 6666098 измерительных показателей оказалась не совсем удачной, скорее сложной, конструкция внутренней части. В частности, это проявляется в том, что она требует большого количества дополнительных отдельных компонентов, служащих в качестве дополнительных масс, которые требуют соответственно затрат на изготовление и сборку. Эти отдельные компоненты при этом служат практически исключительно для регулирования масс и/или распределения массы внутренней части и в этом отношении являются практически "фальшмассой".
В связи с этим задачей изобретения является улучшение механической конструкции измерительного преобразователя названного выше рода таким образом, чтобы его соответствующая внутренняя часть могла бы состоять из сравнительно меньшего количества отдельных компонентов и в этом отношении представляла бы меньший комплекс. Несмотря на это должно быть обеспечено то, что, с одной стороны, соответствующий первичный измерительный преобразователь будет хорошо динамически сбалансирован в широком диапазоне плотности среды и, с другой стороны, будет иметь меньшую массу в сравнении с измерительными преобразователями, предложенными в US-A 5705754 или US-A 5287754. В частности, при этом должна быть обеспечена возможность, как и прежде, эффективного применения предложенного в US-B 6666098 компенсационного принципа концевых внутренних крутильных вибраторов, настроенных в основном на полезную частоту измерительной трубы и настроенного на полезную частоту уравновешивающего устройства.
Для решения задачи изобретение заключается в измерительном преобразователе вибрационного типа для среды, протекающей в трубопроводе. Измерительный преобразователь включает корпус преобразователя, а также расположенную в корпусе преобразователя внутреннюю часть. Внутренняя часть имеет, по меньшей мере, одну изогнутую при работе, по меньшей мере, периодически вибрирующую измерительную трубу для пропуска среды, а также зафиксированное со стороны впуска на измерительной трубе при образовании первой зоны сопряжения на измерительной трубе со стороны впуска и при образовании второй зоны сопряжения и со стороны выпуска на измерительной трубе при образовании второй зоны сопряжения уравновешивающее устройство, причем внутренняя часть, по меньшей мере, с помощью двух соединительных трубчатых элементов закреплена в корпусе преобразователя со способностью колебаться. По меньшей мере, два соединительных трубчатых элемента, через которые измерительная труба к тому же при работе соединяется с трубопроводом, так ориентированы друг к другу, а также к виртуальной продольной оси измерительного преобразователя, что внутренняя часть при работе может качаться вокруг продольной оси. Далее предусмотрено, что уравновешивающее устройство образовано с помощью расположенных сбоку измерительной трубы пластин уравновешивающего устройства, и что уравновешивающее устройство образовано с помощью, по меньшей мере, двух пластин уравновешивающего устройства, из которых первая пластина уравновешивающего устройства расположена с левой стороны измерительной трубы, и вторая пластина уравновешивающего устройства расположена с правой стороны измерительной трубы.
Согласно первому исполнению изобретения предусмотрено, что уравновешивающее устройство образовано с помощью расположенных сбоку измерительной трубы пластин уравновешивающего устройства и, что каждая из, по меньшей мере, двух пластин уравновешивающего устройства имеет изогнутую ось, проходящую через центр тяжести, которая воображаемо проходит между дистальной относительно продольной оси контурной линией, а также проксимальной относительно продольной оси контурной линией. По усовершенствованному варианту этого исполнения изобретения предусмотрено, что уравновешивающее устройство образовано с помощью расположенных сбоку измерительной трубы пластин уравновешивающего устройства, и что ось, проходящая через центр тяжести, каждой из, по меньшей мере, двух пластин уравновешивающего устройства, по меньшей мере, в области среднего участка имеет вогнутый вид относительно продольной оси. По другому усовершенствованному варианту этого исполнения изобретения предусмотрено, что уравновешивающее устройство образовано с помощью расположенных сбоку измерительной трубы пластин уравновешивающего устройства, и что ось, проходящая через центр тяжести каждой из, по меньшей мере, двух пластин уравновешивающего устройства, по меньшей мере, в области зон сопряжения имеет соответственно выпуклый вид относительно продольной оси. Далее предусмотрено, что ось, проходящая через центр тяжести каждой из, по меньшей мере, двух пластин уравновешивающего устройства, по меньшей мере, в области среднего участка уравновешивающего устройства в основном имеет U-образную или V-образную форму и/или, что ось, проходящая через центр тяжести, каждой из, по меньшей мере, двух пластин уравновешивающего устройства в основном параллельна оси, проходящей через центр тяжести измерительной трубы, которая воображаемо проходит внутри ее ширины в свету.
Согласно второму исполнению изобретения предусмотрено, что уравновешивающее устройство образовано с помощью расположенных сбоку измерительной трубы пластин уравновешивающего устройства, и что каждая из, по меньшей мере, двух пластин уравновешивающего устройства имеет внешнюю боковую поверхность, у которой первый край образован кромкой, дающей дистальный контур относительно продольной оси, а также второй край образован кромкой, дающей проксимальный контур относительно продольной оси. По усовершенствованному варианту этого исполнения изобретения предусмотрено, что каждая из, по меньшей мере, двух пластин уравновешивающего устройства образована так и расположена в измерительном преобразователе так, что как кромки, дающие как дистальный, так и проксимальный контур каждой из, по меньшей мере, двух пластин уравновешивающего устройства, по меньшей мере, в области среднего участка уравновешивающего устройства имеют различное расстояние от нуля до продольной оси. При этом каждая из, по меньшей мере, двух пластин уравновешивающего устройства может быть образована так, что, по меньшей мере, в области среднего участка уравновешивающего устройства местная высота пластины соответственно меньше, чем соответственно в области обеих зон сопряжения, причем местная высота пластины тут же соответствует наименьшему расстоянию между кромками, дающими дистальный и проксимальный контур каждой из, по меньшей мере, двух пластин уравновешивающего устройства. Далее предусмотрено, что каждая из, по меньшей мере, двух пластин уравновешивающего устройства образована так, что она в области среднего участка уравновешивающего устройства имеет наименьшую высоту пластины, и/или что высота пластины каждой из, по меньшей мере, двух пластин уравновешивающего устройства, соответственно следуя от зоны сопряжения к середине участка уравновешивающего устройства, в частности, снижается монотонно или непрерывно.
Согласно третьему исполнению изобретения предусмотрено, что уравновешивающее устройство образовано с помощью расположенных сбоку измерительной трубы пластин уравновешивающего устройства, и что каждая из, по меньшей мере, двух пластин уравновешивающего устройства имеет арочный или подковообразный контур.
Согласно четвертому исполнению изобретения предусмотрено, что уравновешивающее устройство образовано с помощью расположенных сбоку измерительной трубы пластин уравновешивающего устройства, и что каждая из, по меньшей мере, двух пластин, образующих уравновешивающее устройство, расположена в основном параллельно измерительной трубе.
Согласно пятому исполнению изобретения предусмотрено, что измерительная труба и уравновешивающее устройство образованы и ориентированы друг к другу так, что как центр тяжести массы измерительной трубы, отстоящий от виртуальной продольной оси, так и центр тяжести массы уравновешивающего устройства, отстоящий от виртуальной продольной оси, лежат в общей области измерительного преобразователя, натянутой от виртуальной продольной оси и измерительной трубы. Далее измерительная труба и уравновешивающее устройство образованы и ориентированы друг к другу так, что центр тяжести массы измерительной трубы удален от продольной оси дальше, чем центр тяжести уравновешивающего устройства. По усовершенствованному варианту этого исполнения предусмотрено, что каждый из названных выше центров тяжести массы имеет расстояние до виртуальной продольной оси, которое больше 10% наибольшего расстояния между измерительной трубой и виртуальной продольной осью и/или которое меньше чем 90% наибольшего расстояния между измерительной трубой и виртуальной продольной осью. По другому усовершенствованному варианту этого исполнения изобретения предусмотрено, что каждый из названных выше центров тяжести массы имеет расстояние до виртуальной продольной оси, которое больше 30 мм, и/или что отношение расстояния каждого из названных выше центров тяжести массы к диаметру измерительной трубы соответственно больше, чем единица. В частности, отношение расстояния каждого из названных выше центров тяжести массы к диаметру измерительной трубы может быть соответственно больше двух и меньше десяти.
Согласно шестому исполнению изобретения предусмотрено, что диаметр измерительной трубы больше 1 и меньше 100 мм.
Согласно седьмому исполнению изобретения предусмотрено, что продольная ось измерительного преобразователя воображаемо соединяет обе зоны сопряжения друг с другом.
Согласно восьмому исполнению изобретения предусмотрено, что уравновешивающее устройство имеет массу, которая больше массы измерительной трубы. По усовершенствованному варианту этого исполнения изобретения предусмотрено, что отношение массы уравновешивающего устройства к массе измерительной трубы больше двух.
Согласно девятому исполнению изобретения предусмотрено, что измерительная труба образовано в основном в форме U или V.
Согласно десятому исполнению изобретения предусмотрено, что измерительная труба и уравновешивающее устройство со стороны впуска механически соединены друг с другом с помощью, по меньшей мере, первого соединительного узла и со стороны выпуска с помощью, по меньшей мере, второго соединительного узла.
Согласно одиннадцатому исполнению изобретения предусмотрено, что соединительные трубчатые элементы имеют в основном прямые трубчатые сегменты. По усовершенствованному варианту этого исполнения изобретения предусмотрено, что соединительные трубчатые элементы ориентированы друг к другу, что трубчатые сегменты проходят в основном параллельно виртуальной продольной оси. При этом соединительные трубчатые элементы могут быть так ориентированы друг к другу, что в основном прямые трубчатые сегменты лежат на одной прямой друг с другом и/или в основном с виртуальной продольной осью.
Согласно двенадцатому исполнению изобретения предусмотрено, что измерительная труба при работе совершает, по меньшей мере, периодически изгибные колебания относительно уравновешивающего устройства и продольной оси.
Согласно тринадцатому исполнению изобретения предусмотрено, что измерительная труба и уравновешивающее устройство при работе, по меньшей мере, периодически и, по меньшей мере, соразмерно участию совершают с одинаковой частотой изгибные колебания вокруг продольной оси. Согласно усовершенствованному варианту этого исполнения изобретения далее предусмотрено, что это такие изгибные колебания вокруг продольной оси, которые, по меньшей мере, соразмерно участию находятся вне фазы друг с другом, в частности, в основном, противоположны по фазе.
Согласно четырнадцатому исполнению изобретения предусмотрено, что внутренняя часть, закрепленная в корпусе преобразователя со способностью колебаться, имеет природную моду латеральных колебаний, в которой она при работе при деформации обоих соединительных трубчатых элементов колеблется, по меньшей мере, периодически относительно корпуса преобразователя и латерально вокруг продольной оси.
Согласно пятнадцатому исполнению изобретения предусмотрено, что внутренняя часть, закрепленная в корпусе преобразователя со способностью колебаться, имеет моду маятниковых движений, в которой она при работе при деформации обоих соединительных трубчатых элементов качается, по меньшей мере, периодически вокруг виртуальной продольной оси. Согласно усовершенствованному варианту этого исполнения изобретения далее предусмотрено, что, по меньшей мере, природная собственная частота моды маятниковых движений меньше самой низкой частоты колебаний, с которой в данный момент вибрирует измерительная труба, и/или что, по меньшей мере, мгновенная природная собственная частота моды маятниковых движений постоянно меньше мгновенной самой низкой природной собственной частоты измерительной трубы.
Согласно шестнадцатому исполнению изобретения предусмотрено, что внутренняя часть, закрепленная в корпусе преобразователя со способностью колебаться, имеет как моду маятниковых движений, в которой она при работе при деформации обоих соединительных трубчатых элементов качается, по меньшей мере, периодически вокруг виртуальной продольной оси, так и природную моду латеральных колебаний, в которой она при работе при деформации обоих соединительных трубчатых элементов колеблется, по меньшей мере, периодически относительно корпуса преобразователя и латерально вокруг продольной оси, и что мода латеральных колебаний внутренней части имеет самую низкую собственную частоту, которая больше самой низкой собственной частоты моды маятниковых движений внутренней части. По усовершенствованному варианту этого исполнения изобретения далее предусмотрено, что отношение самой низкой собственной частоты моды латеральных колебаний внутренней части к самой низкой собственной частоте моды маятниковых движений внутренней части больше 1,2, и/или что отношение самой низкой собственной частоты моды латеральных колебаний внутренней части к самой низкой собственной частоте моды маятниковых движений внутренней части меньше 10. В частности, названное выше отношение самой низкой собственной частоты моды латеральных колебаний внутренней части к самой низкой собственной частоте моды маятниковых движений внутренней части может при этом быть больше 1,5 и меньше 5.
Согласно семнадцатому исполнению изобретения предусмотрено, что внутренняя часть, закрепленная в корпусе преобразователя со способностью колебаться, имеет моду маятниковых движений, в которой она при работе при деформации обоих соединительных трубчатых элементов качается, по меньшей мере, периодически вокруг виртуальной продольной оси, и что, по меньшей мере, природная собственная частота моды маятниковых движений внутренней части меньше самой низкой частоты колебаний, с которой измерительная труба вибрирует в данный момент, и/или что, по меньшей мере, мгновенная природная собственная частота моды маятниковых движений внутренней части постоянно меньше мгновенной самой низкой природной собственной частоты измерительной трубы. По усовершенствованному варианту этого исполнения изобретения предусмотрено, что отношение самой низкой собственной частоты измерительной трубы к самой низкой собственной частоте моды маятниковых движений внутренней части больше 3 и/или меньше 20. В частности, отношение самой низкой собственной частоты измерительной трубы к самой низкой собственной частоте моды маятниковых движений внутренней части при этом может быть больше 5 и меньше 10.
Согласно восемнадцатому исполнению измерительного преобразователя, предложенного в соответствии с изобретением, он включает далее устройство возбуждения для создания вибрации измерительной трубы и уравновешивающего устройства.
Согласно девятнадцатому исполнению измерительного преобразователя, предложенного в соответствии с изобретением, он включает далее систему датчиков для регистрации колебаний, по меньшей мере, измерительной трубы.
По усовершенствованному варианту этого исполнения изобретения предусмотрено, что система датчиков для регистрации колебаний измерительной трубы включает, по меньшей мере, первый датчик, расположенный со стороны впуска на измерительной трубе, а также второй датчик, расположенный со стороны выпуска на измерительной трубе. К тому же может быть преимуществом, если система датчиков для регистрации колебаний измерительной трубы далее включает, по меньшей мере, один расположенный со стороны впуска на измерительной трубе третий датчик, а также расположенный со стороны выпуска на измерительной трубе четвертый датчик. В частности, преимущество будет иметь место, если первый датчик расположен против третьего датчика и второй датчик расположен против четвертого датчика на измерительной трубе.
Основная идея изобретения заключается в том, чтобы в противоположность измерительным преобразователям, показанным в US-B 6666098, уравновешивающее устройство собирается из расположенных сбоку измерительной трубы пластин и с помощью соответствующего формообразования осуществляется как настройка уравновешивающего устройства на полезную частоту измерительной трубы, так и регулировка масс, распределение масс и моментов инерции массы вокруг продольной оси, необходимые для предложенного в US-B 6666098 механизма разъединения. Далее, в частности, на основании применения пластин уравновешивающего устройства в основном подковообразного контура с одной стороны, и сужающейся к середине высоты пластины с другой стороны, уравновешивающее устройство и в этом отношении также внутренняя часть очень просто регулируются как относительно распределения массы, так и в качестве следствия этого относительно названных выше собственных частот. Кроме того, концевые крутильные вибраторы, требуемые для механизма разъединения, могут быть также образованы в виде интегральных элементов внутренней части и при этом настраиваться в широкой степени независимо от приведенных выше критериев.
Вследствие этого предложенный в US-B 6666098 компенсационный принцип может быть не только преобразован в значительной степени, но и улучшен далее в направлении того, что уравновешивающее устройство может образовываться не только несколько тяжелее, но и, в частности, несколько более жестким к изгибу и кручению. Далее уже при сравнительно небольшом росте массы порядка на 10% по сравнению с однажды названным измерительным преобразователем типа "PROMASS Н" смогли достичь повышения чувствительности более чем на 50% и стало быть также соответствующего повышения точности измерений. В частности, наряду с повышением зависящей от плотности чувствительности точки нуля даже при значительном отклонении от калиброванной эталонной плотности измерительного преобразователя смогли установить существенное повышение точности измерения встроенных измерительных приборов при малых скоростях расхода.
Предложенный в соответствии с изобретением измерительный преобразователь далее отличается тем, что при применении уравновешивающего устройства описанного выше вида с соответственно более высокой массой оба соединительных трубчатых элемента без затруднений могут исполняться короткими, и, таким образом, может быть существенно уменьшена длина встройки измерительного преобразователя в целом при остающемся в основном высоким качестве динамического разъединении колебаний. Кроме того, измерительный преобразователь несмотря на свою небольшую длину встройки может, как и прежде, сравнительно легко осуществляться.
Ниже изобретение и другие изобретения поясняются с помощью примера осуществления, который представлен на чертежах. Одинаковые детали на фигурах снабжены одинаковыми позициями. Когда это нужно для наглядности, уже упомянутые позиции на последующих фигурах опускаются.
На фиг.1a, 1b показан встроенный измерительный прибор для сред, текущих в трубопроводах, в различных видах сбоку;
фиг.2 показывает частично разрезанный вид в перспективе измерительного преобразователя вибрационного типа, пригодного для встроенного измерительного прибора на фиг.1a, 1b;
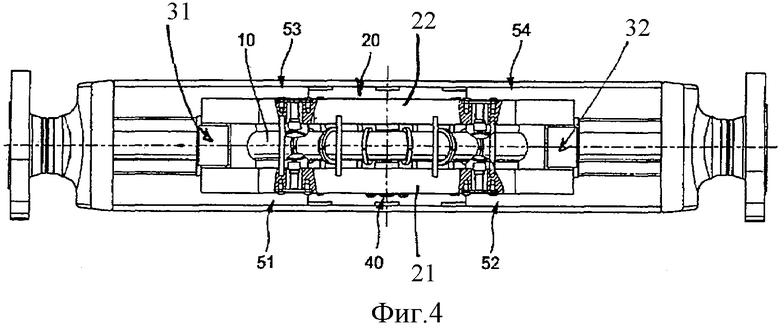
фиг.3 и 4 показывают измерительный преобразователь на фиг.2 с частичными разрезами в различных видах сбоку.
На фиг.1a, 1b показан встраиваемый измерительный прибор, который может быть установлен на трубопроводе, к примеру технологическом трубопроводе промышленной установки, в качестве кориолисова измерительного прибора массового расхода, измерительного прибора плотности, измерительного прибора вязкости или т.п., который служит для измерения и/или контроля, по меньшей мере, одного параметра, например массового расхода, плотности, вязкости и т.д., среды, протекающей в трубопроводе. Для этого встраиваемый измерительный прибор включает измерительный преобразователь вибрационного типа, через который при работе соответственно протекает среда, подлежащая измерению. На фиг.2 и 3 схематически показан соответствующий пример осуществления такого измерительного преобразователя вибрационного типа. Кроме того, принципиальная механическая конструкция, а также принцип действия могут быть сравнены с механической конструкцией и принципом действия с измерительным преобразователем, представленным в US-B 6666098. Измерительный преобразователь служит для создания в проходящей среде механических реакций, например, зависящих от массового расхода сил Кориолиса, зависящих от плотности сил инерции и/или зависящих от вязкости сил трения, которые воздействуют на измерительный преобразователь и могут быть измерены, в частности зарегистрированы с помощью датчиков. Отвлекаясь от этих реакций, известным специалисту способом могут измеряться, таким образом, массовый расход m, плотность r и/или вязкость h среды. Для этого измерительный преобразователь включает корпус 100 преобразователя, а также расположенную в корпусе 100 преобразователя внутреннюю часть, которая собственно способствует физико-электрическому конвертированию, по меньшей мере, одного подлежащего измерению параметра.
Для пропуска среды внутренняя часть включает - здесь единственную - изогнутую измерительную трубу, которую при работе заставляют вибрировать, и при этом она, колеблясь вокруг статического положения покоя, неоднократно упруго деформируется. Измерительная труба 10 и в этом отношении ось, проходящая через центр тяжести измерительной трубы, воображаемо проходящая внутри ширины в свету, могут быть, например, в основном образованы в форме W, U или, как показано на фиг.2 форме V. Так как измерительный преобразователь должен быть рассчитан на многие случаи применения, в частности, в области промышленной измерительной техники и автоматизации, далее предусмотрено, что измерительная труба в зависимости от применения измерительного преобразователя имеет диаметр, который лежит в диапазоне между примерно 1 и примерно 100 мм.
Для минимизации помех, действующих на измерительную трубу 10, как и для уменьшения энергии колебаний, передающейся со стороны измерительного преобразователя к присоединенному трубопроводу, в измерительном преобразователе далее предусмотрено уравновешивающее устройство 20. Оно, как показано на фиг.2, расположено в измерительном преобразователе на расстоянии сбоку от измерительной трубы и зафиксировано соответственно на измерительной трубе 10 при образовании первой зоны сопряжения 11# со стороны впуска - практически определяющей впускной конец измерительной трубы 10 - и при образовании второй зоны сопряжения 12# со стороны выпуска - практически определяющей выпускной конец измерительной трубы 10. Уравновешивающее устройство 20 в представленном примере осуществления, проходящее в основном параллельно измерительной трубе 10 и при известных обстоятельствах также соосно с ней, может, например, быть выполнено в виде трубы или в основном иметь форму короба. В последнем случае уравновешивающее устройство 20, как также изображено на фиг.2, может быть образовано, например, с помощью пластин, расположенных с левой и правой стороны измерительной трубы 10.
Как видно из совместного рассмотрения фиг.1, 2 и 3, уравновешивающее устройство 20 с помощью, по меньшей мере, одного первого соединительного узла 31 со стороны впуска закреплено на впускном конце 11# измерительной трубы 10 и с помощью, по меньшей мере, одного второго соединительного узла 32 со стороны выпуска, в частности, в основном идентичного соединительному узлу 31, закреплено на выпускном конце 12# измерительной трубы 10. В качестве соединительных узлов 31, 32 при этом могут, например, служить узловые косынки, которые соответствующим образом закреплены со стороны впуска и со стороны выпуска соответственно на измерительной трубе 10 и уравновешивающем устройстве 20. Далее, как предлагается в показанном здесь примере осуществления, может служить в качестве соединительного узла 31 или в качестве соединительного узла полностью закрытый короб, образованный с помощью узловых косынок, отстоящих друг от друга в направлении продольной оси, вместе с выступающими со стороны впуска и со стороны выпуска концами уравновешивающего устройства 20, или при известных обстоятельствах также частично открытая рама.
Для пропуска подлежащей измерению среды измерительная труба 10 с помощью выходящего со стороны впуска в область первой зоны 11# сопряжения первого соединительного трубчатого элемента 11 и с помощью выходящего со стороны выпуска в область второй зоны 12# сопряжения, в частности в основном идентичного с первым соединительным трубчатым элементом 11, второго соединительного трубчатого элемента 12 соответственно присоединена к подводящему или отводящему - здесь не показано - трубопроводу, причем каждый из обоих соединительных трубчатых элементов 11, 12 имеет в основном прямые трубчатые сегменты. Предпочтительным образом измерительная труба 10 вместе с обоими соединительными трубчатыми элементами 11, 12 может быть выполнена заодно, так что для ее изготовления может служить, например, один трубообразный полуфабрикат. Вместо того, чтобы измерительная труба 10, впускной патрубок 11 и выпускной патрубок 12 были образованы соответственно сегментами одной, цельной трубы, они могут, если необходимо, изготавливаться из отдельных, последовательно соединенных, например, с помощью сварки, полуфабрикатов. Для изготовления измерительной трубы 10 могут, впрочем, применяться традиционные для таких измерительных преобразователей материалы, такие как сталь, титан, цирконий, тантал и т.д.
Как далее показано на фиг.2 и 3, в частности, более жесткий к изгибу и кручению в сравнении с измерительной трубой 10 корпус преобразователя, в частности, жестко закреплен на дистальном относительно первой зоны сопряжения 11# впускном конце соединительного трубчатого элемента со стороны впуска, а также на дистальном относительно первой зоны сопряжения #11 выпускном конце соединительного трубчатого элемента 12 со стороны выпуска. В этом отношении, следовательно, вся внутренняя часть не только полностью окружена корпусом 100 преобразователя, а благодаря своей собственной массе и пружинящему эффекту обоих соединительных трубчатых элементов 11, 12 закреплена в корпусе 100 преобразователя также со способностью колебаться. Дополнительно к размещению внутренней части корпус 100 преобразователя может к тому же служить для того, чтобы на нем крепить корпус 200 электронного устройства встраиваемого измерительного прибора с установленной в нем электроникой измерительного прибора. Для случая, когда измерительный преобразователь нужно разъемно установить на трубопроводе, далее соединительному трубчатому элементу 11 со стороны впуска его впускному концу придан первый фланец 13 и соединительному трубчатому элементу 12 со стороны выпуска его выпускному концу придан второй фланец 14. Фланцы 13,14 при этом, как это принято у измерительных преобразователей описанного вида, по меньшей мере, частично встроены с концевых сторон в корпус 100 преобразователя. Если необходимо, соединительные трубчатые элементы 11, 12 могут соединяться, впрочем, также напрямую с трубопроводом, например, с помощью сварки или пайки твердым припоем.
При работе измерительного преобразователя, как это обычно для измерительных преобразователей вибрационного типа, измерительная труба 10, таким образом, побуждается к консольным колебаниям при собственной частоте возбуждения fexc, что она, колеблясь в так называемой полезной моде вокруг продольной оси L измерительного преобразователя, в основном изгибается согласно природной первой форме собственных колебаний. Вследствие этого измерительная труба 10 при работе совершает, по меньшей мере, периодически изгибные колебания относительно уравновешивающего устройства 20 и продольной оси L. Одновременно также в уравновешивающем устройстве 20 возбуждаются консольные колебания, а именно так, что оно колеблется, по меньшей мере, сообразно участию вне фазы, в частности, в основном противофазно к колеблющейся в полезной моде измерительной трубе 10. В частности, измерительная труба 10 и уравновешивающее устройство 20 при этом возбуждаются так, что при работе они, по меньшей мере, периодически и, по меньшей мере, сообразно участию выполняют изгибные колебания вокруг продольной оси L одинаковой частоты, но противоположные по фазе. При этом изгибные колебания могут быть выполнены так, что они одинакового модального порядка и при, по меньшей мере, находящейся в покое текучей среды в основном имеют одинаковую форму. Говоря по-другому, измерительная труба 10 и уравновешивающее устройство 20 движутся в этом случае по способу стоек камертона, колеблющихся друг против друга. Согласно другому исполнению изобретения при этом частота возбуждения или также частота полезной моды fexc регулируется таким образом, что она по возможности точно соответствует, в частности, самой низкой природной собственной частоте измерительной трубы 10. При применении измерительной трубы, изготовленной из нержавеющей стали, с номинальным внутренним диаметром 29 мм, толщиной стенки около 1,5 мм, растянутой длиной 420 мм и видимой длиной 305 мм, замеренной от впускного конца #11 до выпускного конца 12#, самая низкая резонансная частота ее, например, при плотности, практически равной нулю, например, у измерительной трубы, полностью заполненной воздухом, составляла бы около 490 Гц. Предпочтительным образом далее предусмотрено, что также самая низкая природная собственная частота f20 уравновешивающего устройства 20 примерно равна самой низкой природной собственной частоте f10 измерительной трубы 10 и в этом отношении также примерно равна частоте возбуждения fexc.
Для создания механических колебаний измерительной трубы 10 и уравновешивающего устройства 20 измерительный преобразователь включает далее, в частности, электродинамическое устройство возбуждения 40. Оно служит для того, чтобы преобразовать, например, электрическую энергию возбуждения Eexc, поданную от установленной в корпусе 200 для электронного устройства, не показанной управляющей электроники названного выше кориолисова измерителя массового расхода, например, с регулируемым током и/или регулируемым напряжением, в воздействующую в форме импульсов или гармонически на измерительную трубу 10 и отклоняющую ее описанным выше способом возбуждающую силу Fexc. Управляющая электроника, пригодная для регулирования энергии возбуждения Eexc показана, например, в US-A 4777833, US-A 4801897, 4879911 или US-A 5009109. Возбуждающая сила Fexc, как это принято у подобного рода измерительных преобразователей, может быть образована двусторонней или односторонней и известным специалисту способом регулируется, например, с помощью схемы регулирования тока и/или напряжения в части ее амплитуды и, например, с помощью фазового контура регулирования относительно ее частоты. В качестве устройства 40 возбуждения может служить, например, простое устройство с подвижной катушкой с установленной на уравновешивающем устройстве 20 цилиндрической катушкой возбуждения, через которую при работе пропускается соответствующий ток возбуждения, и анкером, представляющим постоянный магнит, по меньшей мере, частично погружающимся в катушку возбуждения, который снаружи, в частности, в центре закреплен на измерительной трубе 10. Далее в качестве устройства 40 возбуждения может, например, служить также электромагнит.
Для детектирования колебаний измерительной трубы 10 измерительный преобразователь включает, кроме того, систему датчиков 50. В качестве системы датчиков 50 может применяться практически любая из обычных для подобного рода измерительных преобразователей систем датчиков, которая регистрирует движение измерительной трубы 10, в частности, со стороны впуска и со стороны выпуска и преобразует их в соответствующие сигналы датчиков. Так система датчиков 50 может быть образована, например, с помощью расположенного на измерительной трубе 10 со стороны впуска первого датчика 51 и с помощью расположенного на измерительной трубе 10 со стороны выпуска второго датчика 52. В качестве датчиков могут применяться, например, электродинамические датчики скорости, относительно измеряющие колебания, или также электродинамические датчики перемещения или датчики ускорения. В качестве альтернативы или дополнения к электродинамическим системам датчиков далее для обнаружения колебаний измерительной трубы могут служить также системы датчиков, использующие при измерениях резистивные или пьезоэлектрические тензорезисторы или оптоэлектронные сенсорные системы. Если требуется, далее известным специалисту способом могут быть предусмотрены еще другие необходимые для измерений и/или работы измерительного преобразователя датчики, например, дополнительные датчики колебаний, расположенные на уравновешивающем устройстве 20 и/или корпусе 100 преобразователя, сравните также US-A 5736653, или, например, температурные датчики, расположенные на измерительной трубе 10, уравновешивающем устройстве 20 и/или корпусе 100 преобразователя, сравните US-A 4768384 или WO-А 00/102816.
Для дальнейшего повышения качества сигналов, поступающих от системы датчиков, и/или для получения дополнительной информации о колебаниях по усовершенствованному варианту изобретения далее предусмотрено, что дополнительно к обоим датчикам 51, 52 движения или колебаний располагать на измерительной трубе 10 два других датчика 53, 54 колебаний, реагирующих на движение измерительной трубы, так что, таким образом, система датчиков 50, как также схематически изображено на фиг.4, образована с помощью, по меньшей мере, четырех таких датчиков. При этом третий датчик 53 точно также расположен на измерительной трубе со стороны впуска, и четвертый датчик 54 точно также расположен на измерительной трубе 10 со стороны выпуска. Согласно исполнению этого усовершенствованного варианта изобретения далее предусмотрено, что третий датчик 53 расположен в области первого датчика 51, в частности, на противоположной стороне измерительной трубы 10, и четвертый датчик 54 расположен в области второго датчика 52, в частности, на противоположной стороне измерительной трубы 10. Для представленного на фиг.4 случая, когда соответственно оба датчика 51, 53 со стороны впуска и оба датчика 52, 54 со стороны выпуска расположены на измерительной трубе 10 vis-a-vis, т.е. прямо противоположно друг другу и, если смотреть в направлении колебаний, лежат на одной прямой, можно, таким образом, в частности, при последовательном соединении обоих соответственно противолежащих датчиков 51, 53 или 52, 54 с помощью сравнительно небольших дополнительных расходов на реализацию системы датчиков 50 добиться существенного, полезного улучшения для поступающих от нее сигналов, измеряющих колебания, в отношении сигнал-шумы. Для упрощения как конструкции системы датчиков 50, так и оценки поступающих от нее сигналов, согласно другому исполнению к тому же предусмотрено, что датчики колебаний, образующие систему датчиков 50, в основном имеют одно конструктивное исполнение.
Для предусмотренного эксплуатацией случая, когда по трубопроводу течет среда и, таким образом, массовый расход m отличается от нуля, с помощью вибрирующей описанным выше способом измерительной трубы 10 в протекающей среде индуцируются и силы Кориолиса. Они опять же воздействуют на измерительную трубу 10 и вызывают, таким образом, дополнительную регистрируемую деформацию в основном согласно второй природной форме собственных колебаний. Мгновенное проявление этой так называемой наложенной кориолисовой моды одинаковой частоты с полезной модой зависит при этом, в частности, в отношении ее амплитуды, также от мгновенного массового расхода m. В качестве второй формы собственных колебаний, как это обычно бывает у подобного рода измерительных преобразователей с изогнутой измерительной трубой, может быть, например, форма собственных колебаний антисимметричной крутящей моды, т.е. такая, при которой измерительная труба 10, как упоминалось ранее, осуществляет также вращательные колебания вокруг виртуальной вертикальной, ориентированной перпендикулярно продольной оси L оси земной системы координат, которая лежит в единственной плоскости симметрии показанного измерительного преобразователя.
Для обычного и в этом отношении ожидаемого случая, когда при работе существенно изменяется плотность текущей в измерительной трубе среды и, таким образом, распределение массы во внутренней части, нарушается равновесие между вибрирующей трубой и, так сказать, вибрирующим описанным выше способом уравновешивающим устройством 20. Если бы получающиеся отсюда действующие во внутренней части с одинаковой частотой с колебаниями измерительной трубы 10 поперечные силы не смогли бы компенсироваться, то подвешенная к обоим соединительным трубчатым элементам 11, 12 внутренняя часть отклонялась бы латерально из предписанного статичного положения встройки. Таким образом, поперечные силы через соединительные трубчатые элементы 11, 12, через которые измерительная труба 10, как уже упоминалась, при работе соединяется с трубопроводом, могут, по меньшей мере, частично, воздействовать на присоединенный трубопровод и заставить его, как и встроенный измерительный прибор, вибрировать таким нежелательным образом. Далее подобного рода поперечные силы могут привести к тому, что измерительная труба 10 из-за неравномерной подвески с точки зрения техники колебаний внутренней части или всего измерительного преобразователя, обусловленной, например, практически неизбежными допусками при изготовлении, дополнительно побуждается к имеющими одинаковую частоту паразитным колебаниям, например дополнительным консольным колебаниям согласно второй форме собственных колебаний, которые в этом случае, в частности, из-за одинаковой частоты колебаний с помощью датчиков практически больше были бы неотличимы от собственной кориолисовой моды.
Наряду с латеральными паразитными колебаниями подвешенная в корпусе внутренняя часть может совершать к тому же также маятниковые движения вокруг продольной оси L, при которых зоны сопряжения поворачиваются вокруг продольной оси и соединительные трубчатые элементы 11, 12 закручиваются. Соответствующим образом также обе зоны сопряжения и с этим также оба соединительных узла 31, 32 испытывают соответствующий крутильный поворот вокруг продольной оси L, т.е. они также колеблются, а именно в одной фазе друг с другом. Говоря по-другому, закрепленная со способностью колебаться в корпусе преобразователя внутренняя часть имеет моду маятниковых движений, в которой она при работе при деформациях обоих соединительных трубчатых элементов 11, 12, по меньшей мере, периодически качается вокруг виртуальной продольной оси L. При этом вибрирующая измерительная труба 10 и уравновешивающее устройство 20 совершают дополнительные общие маятниковые движения вокруг продольной оси L, которые, по меньшей мере, при среде, находящейся в состоянии покоя, в основном синфазны друг другу и консольным колебаниям измерительной трубы 10 и уравновешивающего устройства 20, если масса m20 уравновешивающего устройства 20 меньше мгновенной общей массы измерительной трубы 10 с текущей по ней средой. Для обратного случая, когда общая масса измерительной трубы 10 с текущей по ней средой меньше массы уравновешивающего устройства 20, эти маятниковые движения внутренней части могут быть образованы синфазно с консольными колебаниями уравновешивающего устройства 20 измерительной трубы 10.
Но, наоборот, внутренняя часть, подвешенная в корпусе 100 преобразователя со способность колебаться, сама имеет, по меньшей мере, природную моду латеральных колебаний, определенную преимущественно изгибной жесткостью пружины соединительных трубчатых элементов 11, 12, а также мгновенной общей массой. В этой моде латеральных колебаний внутренняя часть при работе при соответствующих образованных в виде изгиба деформациях обоих соединительных трубчатых элементов 11, 12, если ее соответственно возбудить, колебалась бы в резонансе относительно корпуса 100 преобразователя и латерально вокруг продольной оси L. Равным образом внутренняя часть имеет также, по меньшей мере, природную моду маятниковых движений, определенную преимущественно жесткостью пружины на кручение соединительных трубчатых элементов 11, 12, а также мгновенным общим моментом инерции вокруг продольной оси L, в которой она при работе, если ее возбудить соответствующим образом, при соответствующих образованных в виде закручивания деформаций обоих соединительных трубчатых элементов качается в резонанс вокруг виртуальной продольной оси L.
Благоприятным образом, как уже обсуждали в US-B 6666908, остаточные поперечные силы, потенциально граничащие также с модой латеральных колебаний внутренней части, трансформируются с помощью подходящей настройки соединительных трубчатых элементов 11, 12 и внутренней части в значительной мере в существенно менее критичные маятниковые движения всей внутренней части вокруг продольной оси L, и в этом отношении в широкой степени предотвращаются скорее вредные латеральные колебания внутренней части. Для этого только природная собственная частота f1 первого крутильного вибратора, образованного со стороны впуска с помощью соединительного трубчатого элемента 11 и соединительного узла 31, практически определяющего зону сопряжения 11# со стороны впуска, и природная собственная частота f2 второго крутильного вибратора, равным образом образованного со стороны выпуска с помощью соединительного трубчатого элемента 12 и соединительного узла 32, практически определяющего зону сопряжения 11# со стороны выпуска, так отрегулированы с помощью соответствующего выбора размеров обоих соединительных трубчатых элементов 11, 12, а также обоих соединительных узлов 31, 32, что обе собственные частоты f1, f2 примерно равны частоте возбуждения fexc, на которой, по меньшей мере, преимущественно колеблется измерительная труба 10, сравните для этого также US-В 6666098. Вследствие возможных маятниковых движений внутренней части на полезной частоте fexc оба названных выше крутильных вибратора в этом случае равным образом могут совершать крутильные колебания вокруг продольной оси L. Для регулирования собственных частот f1, f2 момент инерции массы со стороны впуска вокруг продольной оси L, настроенный, по меньшей мере, с помощью соединительного узла 31 - здесь в основном с помощью, по меньшей мере, подготовленного соединительного узла 31 со стороны впуска - и жесткость на кручение предназначенного соединительного трубчатого элемента 11, а также момент инерции массы со стороны выпуска вокруг продольной оси L - здесь подготовленный в основном с помощью соединительного узла 32- момент инерции массы вокруг продольной оси AI и жесткость на кручение соединительного трубчатого элемента 12 согласованы соответственно друг с другом. В показанном здесь измерительном преобразователе при определении параметров момента инерции массы для настройки собственной моды на кручение наряду с узловыми косынками и выступающими с концевой стороны концами пластин нужно соответственно принимать во внимание, кроме того, те трубчатые сегменты, которые проходят между обоими узловыми косынками соединительных узлов 31, 32.
На основе настройки полезной моды и собственной моды на кручение описанным способом достигается, что внутренняя часть, которая при работе качается с одинаковой частотой с колеблющейся при частоте возбуждения fexc измерительной трубой 10, возбуждается практически точно также крутильным вибратором на стороне впуска и выпуска во встроенной собственной моде. В этом случае оба крутильных вибратора, колеблющиеся на их собственных частотах f1 или f2 и принудительно также синфазно с внутренней частью, своими крутильными колебаниями практически не создают или создают очень небольшие противодействующие моменты. Таким образом, внутренняя часть при работе установлена так мягко в плане кручения, что ее практически можно рассматривать в плане колебаний полностью разъединенной от обоих соединительных трубчатых соединительных элементов 11, 12. На основании факта, что внутренняя часть несмотря на практически полное разъединение при работе качается вокруг продольной оси L и не вращается, следовательно, не может существовать какого-либо общего вращательного импульса внутренней части. Но вследствие этого почти непосредственно зависящий также от общего вращательного импульса, в частности, при подобном распределении массы в измерительной трубе 10 и уравновешивающем устройстве 20, латеральный общий импульс и таким образом происходящие от него латеральные поперечные силы, которые могут наружу передаваться от внутренней части, равным образом практически равны нулю. Следовательно, для желаемого случая, когда качания внутренней части при работе следуют мгновенной собственной частоте обоих крутильных вибраторов, измерительная труба 10 вместе с уравновешивающим устройством качается практически свободно от поперечных сил и крутящих моментов вокруг продольной оси L. В этом отношении при этом механизме баланса или также механизме разъединения зависящие от плотности небалансы ведут преимущественно к изменениям амплитуды колебаний только маятниковых движений внутренней части, однако, во всяком случае, к пренебрежимо малым латеральным смещениям ее из предназначенного ей статичного положения встройки. Вследствие этого измерительные преобразователи могут быть динамически уравновешены внутри сравнительно широкого рабочего диапазона от плотности r флюида и их чувствительность к созданным внутри поперечным силам существенно уменьшена.
Для реализации кроме этого по возможности надежного разъединения внутренней части также от создающих помехи связей со стороны измерительной трубы 10, в частности, обеспечения этого, когда сама внутренняя часть начинает качаться исключительно вследствие действующего механизма разъединения и по возможности не вследствие возбуждения другими собственными резонансами, согласно другому исполнению изобретения предусмотрено, что, по меньшей мере, природная собственная частота ее моды маятниковых движений меньше самой низкой частоты колебаний, с которой в данный момент позволено вибрировать измерительной трубе 10, например, полезной частоты fexc. Для этого внутренняя часть образована таким образом, что, по меньшей мере, природная самая низкая мгновенная собственная частота моды маятниковых движений внутренней части постоянно меньше природной самой низкой мгновенной собственной частоты измерительной трубы.
Вследствие того, что реализованный предложенным способом механизм разъединения основывается в основном на скорее конструктивной, при работе не подлежащей практически изменению настройке названных выше крутильных вибраторов и внутренней части, вполне естественно следует ожидать даже в сравнении с существующими измерительными преобразователями без описанного выше механизма разъединения очень низкую расстройку вследствие изменяющихся свойств среды. Речь может идти о настройке на возможные параметры наряду с плотностью, например, о вязкости среды и/или ее температуре и, таким образом, о настройке самой внутренней части. Для обеспечения возможности подготовки для таких случаев по возможности хорошо уравновешенного измерительного преобразователя, согласно другому исполнению изобретения предусмотрено, что для внутренней части выбраны такие размеры, что природная собственная частота ее моды маятниковых движений меньше самой низкой частоты колебаний, с которой в данный момент вибрирует измерительная труба 10, или что, по меньшей мере, одна мгновенная природная собственная частота моды маятниковых движений внутренней части постоянно меньше мгновенной самой низкой природной собственной частоты измерительной трубы 10. При этом оказалось, что отношение самой низкой собственной частоты измерительной трубы 10 к самой низкой собственной частоте моды маятниковых движений внутренней части должно быть больше 3 и не должно быть больше 20. Далее при этом оказалось, что для большинства случаев применения может быть достаточно, чтобы это отношение самой низкой собственной частоты измерительной трубы к самой низкой собственной частоте моды маятниковых движений внутренней части находилось в сравнительно узком рабочем диапазоне примерно между 5 и 10.
Согласно другому исполнению изобретения внутренняя часть и оба соединительных трубчатых элемента 11, 12 так настроены друг на друга, что мода латеральных колебаний внутренней части имеет самую низкую собственную частоту, которая больше самой низкой частоты моды маятниковых движений внутренней части. В частности, предусмотрено, что внутренняя часть и оба соединительных трубчатых элемента 11, 12 так настроены друг на друга, что отношение самой низкой собственной частоты моды латеральных колебаний внутренней части к самой низкой собственной частоте моды маятниковых движений внутренней части больше 1,2. Далее предусмотрено, что это отношение самой низкой собственной частоты моды латеральных колебаний внутренней части к самой низкой собственной частоте моды маятниковых движений внутренней части так сбалансировано, что оно меньше 10. Далее при этом оказалось, что для большинства случаев применения может быть достаточно, если отношение самой низкой собственной частоты fL моды латеральных колебаний внутренней части к самой низкой собственной частоте fp моды маятниковых движений внутренней части лежит в сравнительно узком рабочем диапазоне примерно между 1,5 и 5.
Согласно другому исполнению изобретения далее предусмотрено, что оба соединительных трубчатых элемента 11, 12 так ориентированы друг к другу, а также к виртуальной продольной оси L измерительного преобразователя, воображаемо соединяющей обе зоны сопряжения 11#, 12# таким образом, что внутренняя часть при скручивании обоих соединительных трубчатых элементов 11, 12 может качаться вокруг продольной оси L. Для этого оба соединительных трубчатых элемента 11, 12 должны быть так ориентированы друг к другу, что в основном прямые трубчатые сегменты проходят в основном параллельно к виртуальной продольной оси L, а также находятся в основном на одной прямой с ней и друг с другом. Так как оба соединительных трубчатых элемента 11, 12 в показанном здесь примере осуществления практически в основном по всей длине выполнены прямыми, соответственно этому они в целом ориентированы соосно друг с другом, а также с воображаемой продольной осью L. Согласно исполнению изобретения далее предусмотрено, что в качестве компромисса между оптимальным пружинным эффектом, с одной стороны, и приемлемым установочным размером измерительного преобразователя, с другой стороны, длина каждого из соединительных трубчатых элементов 11, 12 соответственно составляет максимум 0,5 кратной величины самого короткого расстояния между обеими зонами сопряжения 11#, 12#. Для получения по возможности компактного измерительного преобразователя каждый из обоих соединительных трубчатых элементов 11, 12 имеет, в частности, длину, которая соответственно меньше 0,4-кратной величины самого короткого расстояния между обеими зонами сопряжения.
Для улучшения описанного выше механизма разъединения уравновешивающее устройство 20 согласно другому исполнению изобретения определено существенно более тяжелым, чем измерительная труба 10. Согласно усовершенствованному варианту этого исполнения изобретения при этом отношение массы m20 уравновешивающего устройства к массе m10 измерительной трубы 10 больше 2. В частности, измерительная труба 10 и уравновешивающее устройство 20 далее образованы так, что последний имеет массу m20, которая также больше массы измерительной трубы 10, заполненной подлежащей измерению средой. Таким образом, уравновешивающее устройство 20 несмотря на свою сравнительно большую массу m20, имеет собственную частоту, которая находится примерно в собственной частоте измерительной трубы, возбужденной в полезной моде или, по меньшей мере, в ее области, далее уравновешивающее устройство 20, по меньшей мере, при этом исполнении изобретения образовано так, что оно соответствующим способом равным образом более жестко к изгибу, чем измерительная труба 10.
Для реализации, в частности, образованного более тяжелым, но, так сказать, также более жестким к изгибу уравновешивающего устройства 20 и для упрощенной настройки его на измерительную трубу 10 и/или на концевые крутильные вибраторы описанным выше способом далее предусмотрено, что уравновешивающее устройство 20, по меньшей мере, сообразно участию, образовано с помощью расположенных сбоку измерительной трубы 10 пластин 21, 22. В показанном примере осуществления уравновешивающее устройство 20 образовано с помощью, по меньшей мере, двух изогнутых пластин 21, 22 уравновешивающего устройства, из которых первая пластина 21 уравновешивающего устройства расположена с левой стороны измерительной трубы 10, и вторая пластина 22 уравновешивающего устройства расположена с правой стороны измерительной трубы 10. Каждая из, по меньшей мере, двух здесь выполненных в основном в виде арочной или подковообразной формы - пластин 21, 22 уравновешивающего устройства имеет внешнюю боковую поверхность, у которой первый край образован кромкой, дающей дистальный контур относительно продольной оси, а также второй край образован кромкой, дающей проксимальный контур относительно продольной оси. В показанном примере осуществления к тому же каждая из, по меньшей мере, двух образующих уравновешивающее устройство 20 пластин 21, 22 расположена в основном параллельно измерительной трубе 10. Согласно другому исполнению изобретения каждая из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства образована так и так расположена в измерительном преобразователе относительно измерительной трубы, что кромки, дающие как дистальный, так и проксимальный контур, каждой из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства, по меньшей мере, в области среднего участка уравновешивающего устройства 20 имеют различное расстояние от нуля до продольной оси L.
Как также изображено на фиг.2 и 3, далее каждая из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства образована так, что, по меньшей мере, в области среднего участка уравновешивающего устройства 20 местная высота пластины соответственно меньше, чем соответственно в области обеих зон сопряжения. При этом местная высота пластины соответствует наименьшему расстоянию, которое на выбранном месте соответствующей пластины уравновешивающего устройства тут же измерено между кромками, дающими дистальный и проксимальный контур каждой из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства. Согласно усовершенствованному варианту изобретения каждая из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства имеет к тому же в области среднего участка уравновешивающего устройства 20 самую малую высоту пластины. Далее предусмотрено, что высота пластины каждой из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства соответственно по направлению от зоны сопряжения к среднему участку уравновешивающего устройства 20, в частности, монотонно или непрерывно снижается.
Согласно другому исполнению изобретения каждая из, по меньшей мере, двух пластин 21, 22, образующих уравновешивающее устройство 20, имеет в основном подковообразный контур или силуэт. Соответствующим образом ось, проходящая через центр тяжести каждой из, по меньшей мере, двух пластин 21, 22, уравновешивающего устройств, воображаемо проходящая между дистальной относительно продольной оси L контурной линией и проксимальной относительно продольной оси контурной линией, равным образом образована изогнутой. Вследствие подковообразной формы уравновешивающего устройства 20 ось, проходящая через центр тяжести, каждой из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства имеет, по меньшей мере, в области среднего участка относительно продольной оси вогнутый вид и, по меньшей мере в области зон сопряжения относительно продольной оси соответственно выпуклый вид.
Измерительная труба 10 и уравновешивающее устройство 20, как уже упоминалось, при необходимости так могут быть выполнены, что они при по возможности подобной внешней пространственной форме имеют также одинаковое или, по меньшей мере, подобное друг другу распределение массы. Согласно другому исполнению изобретения предусмотрено, что пластины 21, 22, образующие уравновешивающее устройство 20, и в этом отношении также само уравновешивающее устройство 20 имеют в основном сравнимую с изогнутой измерительной трубой или, по меньшей мере, подобную арочную форму. Равным образом и ось, проходящая через центр тяжести, каждой из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства, по меньшей мере, в области среднего участка уравновешивающего устройства 20 в основном равным образом выполнена арочной формы, как ось, проходящая через центр тяжести измерительной трубы 10. Соответственно этому пластины 21, 22, образующие уравновешивающее устройство 20, имеют как и само уравновешивающее устройство 20, так и вся внутренняя часть в показанном здесь примере осуществления в основном U-образно или V-образно изогнутый силуэт. Равным образом также ось, проходящая через центр тяжести, каждой из, по меньшей мере, двух пластин 21, 22 уравновешивающего устройства, по меньшей мере, в области среднего участка уравновешивающего устройства 20, расположенного между обеими зонами сопряжения, в основном образована в форме U или V. Согласно другому исполнению изобретения пластины 21, 22 уравновешивающего устройства далее оформлены и так расположены относительно измерительной трубы 10, что ось, проходящая через центр тяжести каждой, по меньшей мере, из двух пластин 21, 22 уравновешивающего устройства параллельна оси, проходящей через центр тяжести измерительной трубы 10, которая воображаемо проходит внутри ее ширины в свету.
С помощью комбинации подковообразного контура уравновешивающего устройства 20 с одной стороны и сужающейся к середине высоты пластины с другой стороны уравновешивающее устройство и в этом отношении также внутренняя часть очень просто могут регулироваться как относительно распределения массы, в частности относительного положения центров тяжести массы М10, М20, так и в значительной степени независимо от этого относительно названных выше собственных частот f20, fL fP. Кроме этого механизм разъединения, реализованный с помощью концевых крутильных вибраторов, может настраиваться в широкой степени независимо от названных выше критериев, так как с одной стороны, правда, выступающие концы пластин уравновешивающего устройства вместе с примененными узловыми косынками вносят преобладающий вклад для требуемого момента инерции массы, но и с другой стороны их подходящая высота может выбираться в широких пределах, не оказывая существенного влияния на названные выше другие колебательные свойства уравновешивающего устройства 20.
Далее оказалось, что у измерительных преобразователей описанного вида, в частности, также при реализации описанного выше механизма разъединения имеет значение не только мягкое в плане вращения механическое соединение внутренней части с корпусом преобразователя и с присоединенным трубопроводом. Удивительным образом, в частности, обращает внимание то, что при работе те моменты, получающиеся вследствие движения вибрирующей трубы, по возможности при одинаковом эффективном угле направляются в концевые зоны сопряжения, как те моменты, которые создаются точно также вибрирующим уравновешивающим устройством. Правда далее оказалось, что вследствие изменяющейся плотности среды между эффективными углами может наступать существенное угловое смещение.
Чтобы практически неизбежно изменяющееся угловое смещение по возможности удержать в приемлемых для желаемого рабочего диапазона границах, в предложенном в соответствии с изобретением измерительном преобразователе далее измерительная труба 10 и уравновешивающее устройство 20 выполнены таким образом и так ориентированы друг к другу, что как отстоящий от виртуальной продольной оси L центр тяжести массы М10 измерительной трубы 10, так и отстоящий от виртуальной продольной оси L центр тяжести массы М20 уравновешивающего устройства 20, как изображено на фиг.3, лежат в общей области измерительного преобразователя, натянутой от виртуальной продольной оси L и измерительной трубы 10. Кроме того, измерительная труба 10 и уравновешивающее устройство 20 далее так образованы и ориентированы друг к другу, что, по меньшей мере, в состоянии покоя центр тяжести массы М10 измерительной трубы 10 удален от продольной оси L дальше, чем центр тяжести М20 массы уравновешивающего устройства 20. Согласно другому исполнению изобретения далее предусмотрено, что каждый из обоих названных выше центров тяжести массы М10, М20 имеет расстояние до виртуальной продольной оси L, которое больше 10% наибольшего расстояния, измеряемого между измерительной трубой 10 и виртуальной продольной осью L. Для реализации измерительного преобразователя с распространенным установочным размером это практически означало бы, что каждый из центров тяжести массы М10, М20 имеет расстояние до виртуальной продольной оси больше 30 мм. Далее оказалось, что отношение расстояния каждого из центров тяжести массы M10, М20 к диаметру измерительной трубы соответственно должно быть больше единицы, в частности два. Далее выявилось, и это может давать преимущество, если каждый из центров тяжести массы M10, М20 имеет расстояние до виртуальной продольной оси L, которое меньше 90% наибольшего расстояния между измерительной трубой 10 и виртуальной продольной осью L. Поэтому согласно другому исполнению изобретения далее предусмотрено, что отношение расстояния каждого из центров тяжести массы М10, М20 к диаметру измерительной трубы 10 сохранено соответственно больше 2 и меньше 10.
Благодаря переносу центров тяжести массы названным способом рабочий диапазон измерительного преобразователя, в частности, в сравнении с показанным в US-B 6666098 измерительным преобразователем может в этом отношении отчетливо повышаться, так как угловое смещение, неизбежно наступающее между обоими названными эффективными углами вследствие изменяющейся плотности среды, может давать как положительные, так и отрицательные результаты и принимает примерно наполовину меньшую и в этом отношении сравнительно малую абсолютную величину. Таким образом, зависящая от плотности подверженность влиянию точки нуля измерительного преобразователя существенно уменьшается.
Чтобы сделать возможным простую в части удобства обращения подгонку уравновешивающего устройства 20 к массе и/или распределению массы, действующему на фактическую трубу 10, на уравновешивающем устройстве 20 могут быть установлены частности, разъемно уравнивающие массу тела 21, служащие в качестве дискретных дополнительных масс. В качестве альтернативы или дополнения соответствующее распределение массы по уравновешивающему устройству 20 может быть реализовано, например, с помощью формирования продольных или кольцевых канавок. Итоговая масса и/или распределение массы в уравновешивающем устройстве 20 или внутренней части, подходящее для соответствующего применения, может, прежде всего, без труда определяться с помощью расчета методом конечных элементов и/или с помощью соответственных калибровочных измерений. Подлежащие регулировке в этом случае параметры конкретного измерительного преобразователя для оптимальной настройки эффективного угла со стороны впуска и со стороны выпуска, т.е. соответствующие массы, распределения масс и/или моменты инерции массы измерительной трубы 10 и уравновешивающего устройства 20 и вытекающие отсюда их геометрические размеры, могут определяться, например, известными для специалиста способами с использованием метода конечных элементов или других моделирующих расчетов с использованием компьютера в сочетании с соответствующими калибровочными измерениями.
Предложенный в соответствии с изобретением измерительный преобразователь благодаря своей хорошей динамической уравновешенности особенно подходит для применения в кориолисовом измерителе массового расхода, кориолисовом измерителе массового расхода-/плотномере или в кориолисовом измерителе массового расхода-/плотности/вязкости, который предусмотрен для сред с существенно изменяющейся при работе плотностью.



В корпусе (100) измерительного преобразователя встроенного Кориолисового расходомера расположена внутренняя часть, включающая в себя изогнутую измерительную трубу (10) для пропуска среды, вибрирующую при работе, а также зафиксированное на измерительной трубе со стороны впуска и со стороны выпуска уравновешивающее устройство (20). Внутренняя часть закреплена в корпусе преобразователя с помощью соединительных трубчатых элементов (11, 12), через которые измерительная труба (10) при работе соединена с трубопроводом. Уравновешивающее устройство образовано с помощью двух расположенных с левой и правой сторон измерительной трубы пластин (21, 22), высота каждой из которых монотонно снижается от зоны сопряжения к среднему участку уравновешивающего устройства. Благодаря выполнению и ориентации измерительной трубы и уравновешивающего устройства центр тяжести массы M10 измерительной трубы удален от продольной оси (L) дальше, чем центр тяжести массы М20 уравновешивающего устройства. Изобретение обеспечивает динамическую балансировку в широком диапазоне плотности среды при одновременном снижении массы внутренней части измерительного преобразователя. 2 н. и 46 з.п. ф-лы, 5 ил.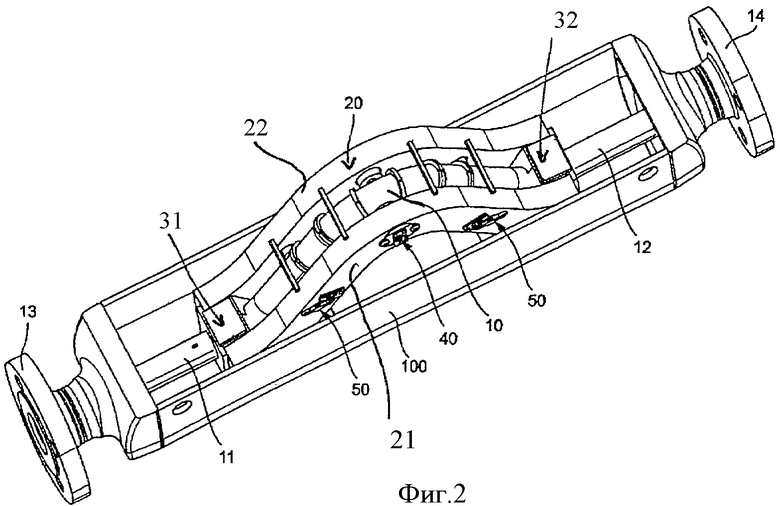
1. Измерительный преобразователь вибрационного типа для среды, текущей в трубопроводе, содержащий корпус преобразователя, расположенную в корпусе преобразователя внутреннюю часть, которая, по меньшей мере, имеет изогнутую, по меньшей мере, периодически вибрирующую при работе измерительную трубу (10) для пропуска среды, а также зафиксированное со стороны впуска на измерительной трубе (10) при образовании первой зоны сопряжения (11#) и со стороны выпуска на измерительной трубе (10) при образовании второй зоны сопряжения (12#) уравновешивающее устройство (20), а также содержит устройство (40) возбуждения вибрации измерительной трубы (10) и уравновешивающего устройства (20) и систему (50) датчиков для регистрации колебаний, по меньшей мере, измерительной трубы (10), причем внутренняя часть закреплена в корпусе преобразователя с возможностью колебания, по меньшей мере, с помощью двух соединительных трубчатых элементов (11, 12), через которые измерительная труба (10) при работе соединена с трубопроводом и которые ориентированы друг к другу, а также к виртуальной продольной оси (L) таким образом, что внутренняя часть при работе может качаться вокруг продольной оси (L), и причем уравновешивающее устройство (20) образовано с помощью, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства, из которых первая пластина (21) уравновешивающего устройства расположена с левой стороны измерительной трубы (10) и вторая пластина (22) уравновешивающего устройства расположена с правой стороны измерительной трубы (10), причем каждая из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства имеет внешнюю боковую поверхность, у которой первый край образован кромкой, дающей отдаленный контур относительно продольной оси, а второй край образован кромкой, дающей ближний контур относительно продольной оси, при этом каждая из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства образована так и расположена в измерительном преобразователе, что кромки, дающие как отдаленный, так и ближний контур каждой из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства, по меньшей мере, в области среднего участка уравновешивающего устройства (20) находятся на расстоянии от продольной оси (L), отличном от нуля.
2. Измерительный преобразователь по п.1, характеризующийся тем, что каждая из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства имеет изогнутую ось, проходящую через центр тяжести, которая воображаемо проходит между отдаленной относительно продольной оси контурной линией, а также ближней относительно продольной оси контурной линией.
3. Измерительный преобразователь по п.2, характеризующийся тем, что ось, проходящая через центр тяжести каждой из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства, по меньшей мере, в области среднего участка имеет вогнутый вид относительно продольной оси.
4. Измерительный преобразователь по п.3, характеризующийся тем, что ось, проходящая через центр тяжести каждой из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства, по меньшей мере, в области зон сопряжения имеет соответственно выпуклый вид относительно продольной оси.
5. Измерительный преобразователь по п.2, характеризующийся тем, что ось, проходящая через центр тяжести каждой, по меньшей мере, из двух пластин (21, 22) уравновешивающего устройства, по меньшей мере, в области среднего участка уравновешивающего устройства (20) в основном имеет U-образную или V-образную форму.
6. Измерительный преобразователь по п.2, характеризующийся тем, что ось, проходящая через центр тяжести каждой из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства, в основном параллельна оси, проходящей через центр тяжести измерительной трубы (10), которая воображаемо проходит внутри ее внутреннего канала.
7. Измерительный преобразователь по п.1, характеризующийся тем, что каждая из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства образована так, что, по меньшей мере, в области среднего участка уравновешивающего устройства (20) местная высота пластины соответственно меньше, чем в области обеих зон сопряжения, причем местная высота пластины тут же соответствует наименьшему расстоянию между кромками, дающими отдаленный и ближний контуры каждой из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства.
8. Измерительный преобразователь по п.7, характеризующийся тем, что каждая из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства образована так, что она в области среднего участка уравновешивающего устройства (20) имеет наименьшую высоту пластины.
9. Измерительный преобразователь по п.8, характеризующийся тем, что каждая из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства образована так, что высота пластины каждой из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства, соответственно следуя от зоны сопряжения к середине участка уравновешивающего устройства (20), в частности, снижается монотонно или непрерывно.
10. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что каждая из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства имеет арочный или подковообразный контур.
11. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что каждая из, по меньшей мере, двух пластин (21, 22), образующих уравновешивающее устройство (20), расположена в основном параллельно измерительной трубе (10).
12. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что измерительная труба (10) и уравновешивающее устройство (20) образованы и ориентированы друг к другу так, что как центр тяжести М10 измерительной трубы (10), отстоящий от виртуальной продольной оси (L), так и центр тяжести М20 уравновешивающего устройства (20), отстоящий от виртуальной продольной оси (L), лежат в общей области измерительного преобразователя, вытянутой от виртуальной продольной оси (L) к измерительной трубе (10).
13. Измерительный преобразователь по п.12, характеризующийся тем, что измерительная труба (10) и уравновешивающее устройство (20) образованы и ориентированы друг к другу так, что центр тяжести массы M10 измерительной трубы (10) удален от продольной оси (L) дальше, чем центр тяжести массы М20 уравновешивающего устройства (20).
14. Измерительный преобразователь по п.13, характеризующийся тем, что каждый из центров тяжести массы М10, М20 имеет расстояние до виртуальной оси (L), которое больше 10% от наибольшего расстояния между измерительной трубой (10) и виртуальной продольной осью (L) и/или причем каждый из центров тяжести массы М10, М20 имеет расстояние до виртуальной продольной оси (L), которое меньше 90% от наибольшего расстояния между измерительной трубой (10) и виртуальной продольной осью (L).
15. Измерительный преобразователь по пп.1-5, характеризующийся тем, что каждый из центров тяжести массы М10, М20 имеет расстояние до виртуальной продольной оси (L), которое больше 30 мм.
16. Измерительный преобразователь по п.15, характеризующийся тем, что отношение расстояния каждого из центров тяжести массы М10, М20 к диаметру измерительной трубы (10) соответственно больше 1 и/или отношение расстояния каждого из центров тяжести массы М10, М20 к диаметру измерительной трубы соответственно больше 2 и меньше 10.
17. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что диаметр измерительной трубы (10) больше 1 и меньше 100 мм.
18. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что продольная ось (L) измерительного преобразователя воображаемо соединяет обе зоны сопряжения (11#, 12#) друг с другом.
19. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что уравновешивающее устройство (20) имеет массу m20, которая больше массы m10 измерительной трубы (10).
20. Измерительный преобразователь по п.19, характеризующийся тем, что отношение массы m20 уравновешивающего устройства (20) к массе m10 измерительной трубы (10) больше 2.
21. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что измерительная труба (10) образована в основном в форме U или V.
22. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что измерительная труба (10) и уравновешивающее устройство (20) со стороны впуска с помощью, по меньшей мере, первого соединительного узла (31) и со стороны выпуска с помощью, по меньшей мере, второго соединительного узла (32) механически соединены друг с другом.
23. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что соединительные трубчатые элементы (11, 12) имеют в основном прямые трубчатые сегменты.
24. Измерительный преобразователь по п.23, характеризующийся тем, что соединительные трубчатые элементы (11, 12) так ориентированы друг к другу, что трубчатые сегменты проходят в основном параллельно виртуальной продольной оси (L).
25. Измерительный преобразователь по п.24, характеризующийся тем, что соединительные трубчатые элементы (11, 12) так ориентированы друг к другу, что в основном прямые трубчатые сегменты в основном лежат на одной прямой.
26. Измерительный преобразователь по п.25, характеризующийся тем, что соединительные трубчатые элементы (11, 12) так ориентированы друг к другу, что в основном прямые трубчатые сегменты в основном лежат на одной прямой с виртуальной продольной осью (L).
27. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что измерительная труба (10) при работе, по меньшей мере, периодически совершает изгибные колебания относительно уравновешивающего устройства (20) и продольной оси (L).
28. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что измерительная труба (10) и уравновешивающее устройство (20) при работе, по меньшей мере, периодически и, по меньшей мере, частично совершают с одинаковой частотой изгибные колебания вокруг продольной оси (L).
29. Измерительный преобразователь по п.28, характеризующийся тем, что измерительная труба (10) и уравновешивающее устройство (20) при работе, по меньшей мере, периодически совершают изгибные колебания вокруг продольной оси (L), которые, по меньшей мере, частично вне фазы друг другу, в частности, в основном противоположны по фазе.
30. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что внутренняя часть, закрепленная в корпусе преобразователя со способностью колебаться, имеет моду собственных латеральных колебаний, в которой она при работе, при деформациях обоих соединительных трубчатых элементов (11, 12), по меньшей мере, периодически колеблется относительно корпуса преобразователя и латерально вокруг продольной оси (L).
31. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что внутренняя часть, закрепленная в корпусе преобразователя со способностью колебаться, имеет моду маятниковых колебаний, в которой она при работе, при деформациях обоих соединительных трубчатых элементов (11, 12), по меньшей мере, периодически качается вокруг виртуальной продольной оси (L).
32. Измерительный преобразователь по п.31, характеризующийся тем, что, по меньшей мере, собственная частота моды собственных маятниковых колебаний меньше самой низкой частоты колебаний, с которой измерительная труба (10) вибрирует в данный момент.
33. Измерительный преобразователь по п.31, характеризующийся тем, что, по меньшей мере, мгновенная собственная частота моды маятниковых колебаний постоянно меньше мгновенной самой низкой природной собственной частоты измерительной трубы (10).
34. Измерительный преобразователь по п.30, характеризующийся тем, что внутренняя часть, закрепленная в корпусе преобразователя со способностью колебаться, имеет моду маятниковых колебаний, в которой она при работе, при деформациях обоих соединительных трубчатых элементов (11, 12), по меньшей мере, периодически качается вокруг виртуальной продольной оси (L) и причем мода латеральных колебаний внутренней части имеет самую низкую собственную частоту, которая больше, чем самая низкая собственная частота моды маятниковых колебаний внутренней части.
35. Измерительный преобразователь по п.34, характеризующийся тем, что отношение самой низкой собственной частоты моды латеральных колебаний внутренней части к самой низкой собственной частоте моды маятниковых колебаний внутренней части больше 1,2.
36. Измерительный преобразователь по п.34 или 35, характеризующийся тем, что отношение самой низкой собственной частоты моды латеральных колебаний внутренней части к самой низкой собственной частоте моды маятниковых колебаний внутренней части меньше 10.
37. Измерительный преобразователь по п.34 или 35, характеризующийся тем, что отношение самой низкой собственной частоты моды латеральных колебаний внутренней части к самой низкой собственной частоте моды маятниковых колебаний внутренней части больше 1,5 и меньше 5.
38. Измерительный преобразователь по п.34 или 35, характеризующийся тем, что, по меньшей мере, природная собственная частота моды маятниковых колебаний внутренней части меньше, чем самая низкая частота колебаний, с которой измерительная труба (10) вибрирует в данный момент, и/или мгновенная природная собственная частота моды маятниковых колебаний внутренней части постоянно меньше, чем мгновенная самая низкая природная собственная частота измерительной трубы (10).
39. Измерительный преобразователь по п.38, характеризующийся тем, что отношение самой низкой собственной частоты измерительной трубы (10) к самой низкой собственной частоте моды маятниковых колебаний внутренней части больше 3.
40. Измерительный преобразователь по п.38, характеризующийся тем, что отношение самой низкой собственной частоты измерительной трубы (10) к самой низкой собственной частоте моды маятниковых колебаний внутренней части меньше 20.
41. Измерительный преобразователь по п.38, характеризующийся тем, что отношение самой низкой собственной частоты измерительной трубы (10) к самой низкой собственной частоте моды маятниковых колебаний внутренней части больше 5 и меньше 10.
42. Измерительный преобразователь по п.1, характеризующийся тем, что система (50) датчиков для регистрации колебаний измерительной трубы (10) включает, по меньшей мере, первый датчик (51), расположенный на измерительной трубе (10) со стороны впуска, а также расположенный на измерительной трубе (10) со стороны выпуска второй датчик (52).
43. Измерительный преобразователь по п.42, характеризующийся тем, что система (50) датчиков для регистрации колебаний измерительной трубы (10) далее включает, по меньшей мере, третий датчик (53), расположенный на измерительной трубе (10) со стороны впуска, а также четвертый датчик (54), расположенный на измерительной трубе (10) со стороны выпуска.
44. Измерительный преобразователь по п.43, характеризующийся тем, что первый датчик (51) расположен на измерительной трубе (10) напротив третьего датчика (53) и второй датчик (52) расположен напротив четвертого датчика (54).
45. Измерительный преобразователь по п.5, характеризующийся тем, что ось, проходящая через центр тяжести каждой из, по меньшей мере, двух пластин (21, 22) уравновешивающего устройства, по меньшей мере, в области зон сопряжения имеет соответственно выпуклый вид относительно продольной оси.
46. Измерительный преобразователь по п.32, характеризующийся тем, что, по меньшей мере, мгновенная природная собственная частота моды маятниковых колебаний постоянно меньше мгновенной самой низкой природной собственной частоты измерительной трубы (10).
47. Измерительный преобразователь по одному из пп.1-5, характеризующийся тем, что содержит систему (50) датчиков для регистрации колебаний, по меньшей мере, измерительной трубы (10).
48. Встроенный Кориолисовый прибор для измерения массового расхода, плотности и/или вязкости среды, текущей в трубопроводе, содержащий измерительный преобразователь по одному из пп.1-47.
| US 6666098 В2, 23.12.2003 | |||
| Бункер зерноуборочного комбайна | 1988 |
|
SU1528374A2 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| US 6684716 В2, 03.02.2004 | |||
| Кориолисовый расходомер | 1991 |
|
SU1793234A1 |

