Область техники
Настоящее изобретение относится к мобильному устройству беспроводной связи, устройству беспроводной связи и способу обработки данных от каналов связи.
Уровень техники
Известна система мобильной беспроводной связи, которая позволяет осуществлять беспроводную связь, используя радиоканалы, такие как канал управления, физический канал связи и прямой канал связи. Здесь канал управления является радиоканалом, используемым между базовой станцией и подвижными станциями для того, чтобы выполнять вызов, прием вызова в подвижных станциях и другие виды управления передачей. Физический канал связи является радиоканалом, используемым между базовой станцией и подвижными станциями, так что каждая из подвижных станций выполняет вызов и передачу данных другим подвижным станциям и стационарным терминалам (например, стационарному телефону и сетевому компьютерному терминалу) через сеть мобильной связи. Прямой канал связи является радиоканалом, используемым так, что каждая из подвижных станций непосредственно выполняет вызов и передачу данных другим подвижным станциям без вмешательства базовой станции.
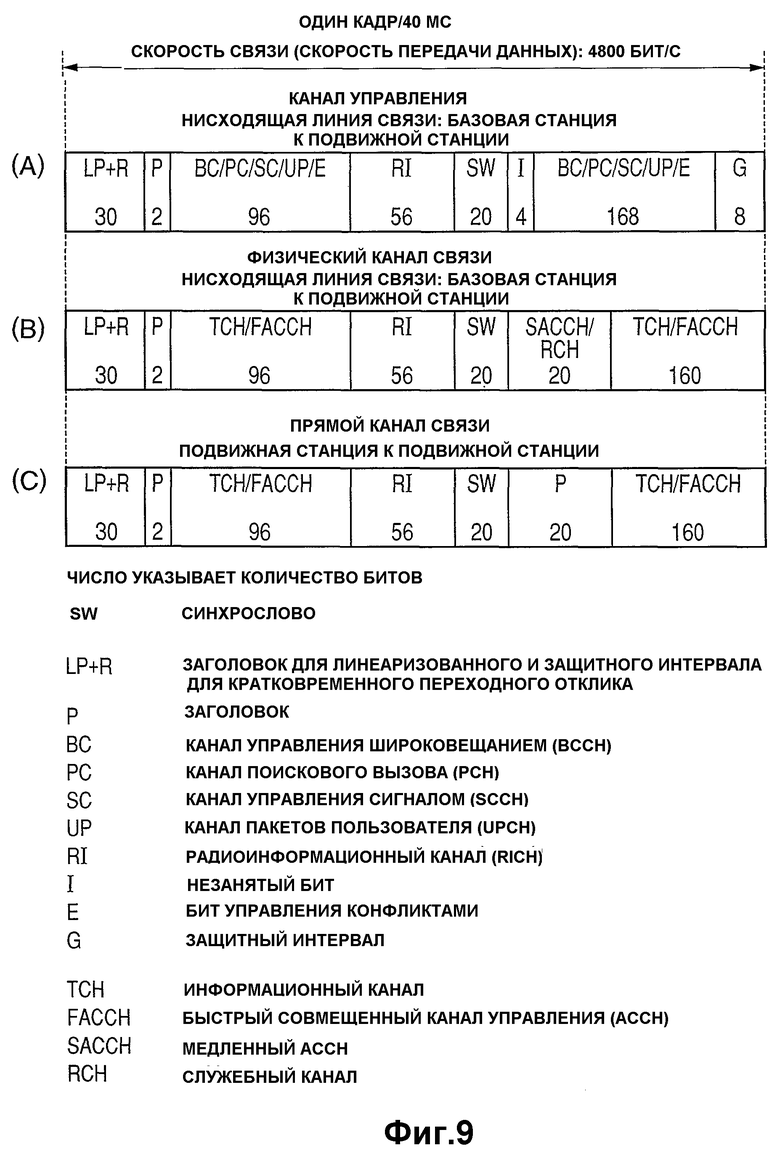
В цифровой связи, использующей такие радиоканалы, данные передачи могут передаваться как заданная структура кадра (например, непатентный Документ 1). Фиг. 9 показывает форматы кадра канала управления (физического канала управления), физического канала связи и прямого канала связи, определенные на стр. 115-116 во втором издании Ассоциации радиопромышленности и бизнеса «Narrow Band Digital Communication System (SCPC/FDMA) Standard ARIB STD-T61, ver. 1.0, second issue» (Стандарт ARIB STD-T61 узкополосной системы цифровой связи (SCPC/FDMA), версия 1.0, второе издание) от 27 мая 1999 г., стр. 115-117, стр. 171-174, как ARIB STD-T61, который является стандартом узкополосной цифровой радиосистемы.
Здесь синхрослова, использованные для кадровой синхронизации, часто имеют одинаковую длину во всех каналах - канале управления, физическом канале связи и прямом канале связи. В примере, показанном на фиг. 9, все синхрослова решено сделать равными 20 битам. Синхрослова фиксированной длины определяются в ARIB STD-27, который является стандартом PDC (Персональной Системы Цифровой Сотовой Связи) как системы мобильной телефонии. Можно распределять обнаружение кадровой синхронизации в цифровой обработке сигналов среди каналов и упрощать обработку путем стандартизации длин синхрослов, например, одинаковой длины. Например, когда канал управления смещается в физический канал связи или когда запускается прямой канал связи, для того чтобы улучшить выполнение синхронизации, используется специальный кадр для синхронизации (синхропакет). В этом случае используются синхрослова длиннее, чем обычно (то есть имеющие 32 бита).
В качестве способа захвата синхрослов в устройстве связи на стороне приема известны различные способы. Например, используется большое количество способов захвата синхрослов путем задания корреляционного значения между синхрословами, известными на стороне приема, и формой сигнала основной полосы частот или т.п., демодулированного из приемного сигнала согласно заданной арифметической обработке. В описанном выше стандарте ARIB STD-T61 полагается, что с помощью одного кадра в 40 мс (миллисекунд) синхронизация устанавливается, когда синхрослово из 20 битов дважды принимается успешно. Следовательно, синхрослова для 40 битов используются в периоде в 80 мс, пока не установится синхронизация.
В системе из микросот, такой как PDC, канал управления и физический канал связи не всегда предоставляются одинаковой базовой станцией. Поэтому технически сложно всегда поддерживать постоянным хронирование между каналом управления и физическим каналом связи. Вследствие этого факта описанный выше стандарт не определяет конкретно кадровую синхронизацию между каналом управления и физическим каналом связи.
Когда осуществляется беспроводная связь с использованием физического канала связи и прямого канала связи, требуется быстро установить линию связи между стороной передачи и стороной приема. Например, когда возникает задержка в установлении линии связи, возникает проблема в том, что начало в разговоре обрезается. Кроме того, когда передаются и принимаются данные оцифрованного звука, количество информации увеличивается до огромной величины. Количество информации, которое следует передать в физическом канале связи и прямом канале связи, может увеличиваться по сравнению с таковым в канале управления. В качестве системы модуляции, имеющей удовлетворительный коэффициент передачи, известна система модуляции QPSK (квадратурная фазовая манипуляция). Система модуляции QPSK заимствуется в PDC и в системе мобильной беспроводной связи, соответствующей стандарту ARIB STD-T61. Тем не менее, также известно, что в системе модуляции QPSK трудно охватывать широкую область одной базовой станцией.
В системе мобильной беспроводной связи, в которой выполняется передача данных, расширение полосы занятой частоты развивается надлежащим образом, чтобы улучшить скорость связи (скорость передачи данных). С другой стороны, в радиоаппаратуре, используемой в основном для речевого вызова, сужение полосы радиоканала развивается надлежащим образом, чтобы повысить эффективность использования частоты. В радиоканале, имеющем суженную полосу, скорость передачи информации (пропускная способность) неизбежно падает. Поэтому длина (количество битов) синхрослова предпочтительно меньше. Тем не менее, когда синхрослово сокращается, производительность кадровой синхронизации ухудшается. В частности, когда имеется много шума в радиоканале, существует проблема в том, что скорость обычного установления синхронизации падает, чтобы вызвать увеличение рассинхронизации.
В системе мобильной беспроводной связи, установленной в пригороде или т.п. в Соединенных Штатах, чтобы сделать возможным охват широкой области одной базовой станцией, может использоваться мощный усилитель мощности на выходном каскаде передачи в базовой станции. В системе модуляции (например, QAM: четырехкратная амплитудная модуляция), в которой огибающая модулированного сигнала является нелинейной, необходимо выполнять усиление, используя только часть, где линейность может поддерживаться во входной/выходной характеристике усилителя мощности, и выход по мощности в усилителе мощности падает. Поэтому предпочтительно использовать системы модуляции, такие как FM (частотная модуляция) и PM (фазовая модуляция), в которых огибающая модулированного сигнала в основном линейная. Тем не менее, в системе модуляции FSK (частотная манипуляция) эффективность передачи примерно половинная по сравнению с таковой в системе модуляции QPSK, и скорость передачи информации (пропускная способность) падает. В этом случае, как и в вышеупомянутом случае, длина синхрослова предпочтительно небольшая. Тем не менее, когда синхрослово сокращается, возникает описанная выше проблема.
Изобретение разработано, принимая во внимание вышеупомянутые обстоятельства, и задачей изобретения является предоставление мобильного устройства беспроводной связи и т.п., которое позволяет устанавливать линию связи путем уменьшения длины синхрослова, чтобы уменьшить время, требуемое для установления синхронизации, и делает возможным обнаружение синхронизации с высокой точностью.
Сущность изобретения
Чтобы решить эту задачу, мобильное устройство беспроводной связи согласно первому аспекту изобретения содержит средство демодуляции для приема радиосигнала, переданного по заданному радиоканалу, и демодуляции сигнала основной полосы частот и средство кадровой синхронизации для обнаружения по меньшей мере заданного синхрослова из последовательности символов, представленной сигналом основной полосы частот демодулированным средством демодуляции, и достижения кадровой синхронизации. Причем, когда сигнал основной полосы частот демодулируется средством демодуляции из радиосигнала, переданного по каналу управления, предоставленному базовой станцией в радиоканале, средство кадровой синхронизации выполняет первую операцию обнаружения для обнаружения, согласно тому, что из следующего: начальная синхронизация, повторная синхронизация или поддержание синхронизации является состоянием синхронизации, только синхрослова из множества кадров, в которых синхрослово, образованное посредством заданной кодовой комбинации, размещено в начале каждого из кадров, и, с другой стороны, завершающее поле, включающее в себя предслово, образованное кодовой комбинацией, отличной от синхрослова, размещено в конце каждого из кадров, и вторую операцию обнаружения для обнаружения как синхрослова, так и предслова.
Предпочтительно, когда сигнал основной полосы частот демодулирован средством демодуляции из радиосигнала, переданного по каналу управления, то средство кадровой синхронизации функционирует, для оценки, что кадровая синхронизация успешно достигнута, когда первая операция обнаружения выполняется, чтобы успешно обнаружить синхрослово один раз в случае, в котором состоянием синхронизации является начальная синхронизация или повторная синхронизация, либо вторая операция обнаружения выполняется, чтобы успешно обнаружить один раз и синхрослово, и предслово в случае, в котором состоянием синхронизации является поддержание синхронизации.
Желательно, чтобы средство кадровой синхронизации выполняло первую операцию обнаружения для обнаружения только синхрослова из множества кадров, в которых синхрослово размещено в начале каждого из кадров, когда сигнал основной полосы частот демодулирован средством демодуляции из радиосигнала, переданного по физическому каналу связи, предоставленному базовой стацией в радиоканале.
Желательно, чтобы когда сигнал основной полосы частот демодулирован средством демодуляции из радиосигнала, переданного по физическому каналу связи, то средство кадровой синхронизации функционирует для оценки, что кадровая синхронизация успешно достигнута, когда синхрослово успешно обнаружено один раз в случае, в котором состоянием синхронизации является начальная синхронизация либо поддержание синхронизации, или когда синхрослово успешно обнаружено много раз в случае, в котором состоянием синхронизации является повторная синхронизация.
Желательно, чтобы средство кадровой синхронизации выполняло, когда сигнал основной полосы частот демодулирован средством демодуляции из радиосигнала, переданного по прямому каналу связи между базовой станцией и другими подвижными станциями в радиоканале, первую операцию обнаружения либо вторую операцию обнаружения из множества кадров, в которых заголовок, включающий в себя предслово, размещен в начале каждого из кадров, и, с другой стороны, синхрослово размещено в каждом из кадров в начале передачи, согласно тому, является ли состоянием синхронизации начальная синхронизация, повторная синхронизация или поддержание синхронизации.
Желательно, чтобы когда сигнал основной полосы частот демодулирован средством демодуляции из радиосигнала, переданного по прямому каналу связи, то средство кадровой синхронизации функционирует для оценки, что кадровая синхронизация успешно достигнута, когда синхрослово успешно обнаружено много раз либо синхрослово и предслово успешно обнаружены один раз в случае, в котором состоянием синхронизации является начальная синхронизация или повторная синхронизация, или когда синхрослово успешно обнаружено один раз в случае, в котором состоянием синхронизации является поддержание синхронизации.
Желательно, чтобы когда выполняется первая операция обнаружения, то средство кадровой синхронизации функционирует для оценки, что синхрослово успешно обнаружено, когда средство кадровой синхронизации сравнивает корреляционное значение между последовательностью символов, представленной сигналом основной полосы частот, демодулированным средством демодуляции, и синхрословом с первым пороговым значением, определенным заранее, и приходит к выводу, что корреляционное значение превышает первое пороговое значение, а когда выполняется вторая операция обнаружения, приходит к выводу, что синхрослово и предслово успешно обнаружены, когда средство кадровой синхронизации сравнивает сумму корреляционного значения между последовательностью символов, представленной сигналом основной полосы частот, демодулированным средством демодуляции, и синхрословом, и корреляционного значения между последовательностью символов, представленной сигналом основной полосы частот, демодулированным средством демодуляции, и предсловом, со вторым пороговым значением, определенным заранее, и приходит к выводу, что сумма превышает второе пороговое значение.
Желательно, чтобы кадр, переданный по каналу управления, и кадр, переданный по физическому каналу связи, предоставленному базовой станцией в радиоканале, передавались с одинаковым хронированием.
Устройство беспроводной связи согласно второму аспекту изобретения является устройством беспроводной связи, которое передает радиосигнал, переданный по заданному радиоканалу. Устройство беспроводной связи передает по каналу управления в радиоканале сигнал беспроводной связи для передачи последовательности символов, в которой во множестве последовательно переданных кадров синхрослово, образованное заданной кодовой комбинацией, размещено в начале каждого из кадров, и, с другой стороны, завершающее поле, включающее в себя предслово, образованное кодовой комбинацией, отличной от синхрослова, размещено в конце каждого из кадров, передает по физическому каналу связи в радиоканале радиосигнал для передачи последовательности символов, в которой во множестве последовательно переданных кадров синхрослово размещено в начале каждого из кадров, и передает кадр, переданный по каналу управления, и кадр, переданный по физическому каналу связи, с одинаковым хронированием.
Способ обработки данных от каналов связи согласно третьему аспекту изобретения является способом обработки данных от каналов связи, осуществляемым мобильным устройством беспроводной связи, которое выполняет беспроводную связь между базовой станцией и любой из других подвижных станций путем передачи и приема радиосигнала, переданного по заданному радиоканалу. При этом способ обработки данных от каналов связи содержит этап демодуляции, на котором принимают радиосигнал и демодулируют сигнал основной полосы частот, и этап кадровой синхронизации, на котором обнаруживают по меньшей мере заданное синхрослово из последовательности символов, представленной сигналом основной полосы частот, демодулированным на этапе демодуляции, и достигают кадровой синхронизации. На этапе кадровой синхронизации, когда сигнал основной полосы частот демодулирован на этапе демодуляции из радиосигнала, переданного по каналу управления, предоставленному базовой станцией в радиоканале, оценивают, что из множества кадров, в которых синхрослово, образованное заданной кодовой комбинацией, размещено в начале каждого из кадров, и, с другой стороны, завершающее поле, включающее в себя предслово, образованное кодовой комбинацией, отличной от синхрослова, размещено в конце каждого из кадров, кадровая синхронизация успешно достигнута, когда выполняют первую операцию обнаружения для обнаружения только синхрослова, и синхрослово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является начальная синхронизация или повторная синхронизация, либо когда выполняют вторую операцию обнаружения для обнаружения и синхрослова, и предслова, и синхрослово и предслово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является поддержание синхронизации, когда сигнал основной полосы частот демодулирован на этапе демодуляции из радиосигнала, переданного по физическому каналу связи, предоставленному базовой станцией в радиоканале, оценивают, что из множества кадров, в которых синхрослово размещено в начале каждого из кадров, кадровая синхронизация успешно достигнута, когда синхрослово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является начальная синхронизация или поддержание синхронизации, либо когда синхрослово успешно обнаруживают много раз в случае, в котором состоянием синхронизации является повторная синхронизация, и, когда сигнал основной полосы частот демодулирован на этапе демодуляции из радиосигнала, переданного по прямому каналу связи между базовой станцией и другими подвижными станциями в радиоканале, оценивают, что кадровая синхронизация успешно достигнута, когда синхрослово успешно обнаруживают много раз, либо когда синхрослово и предслово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является начальная синхронизация или повторная синхронизация, или когда синхрослово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является поддержание синхронизации.
Желательно, когда выполняют первую операцию обнаружения, то на этапе кадровой синхронизации оценивают, что синхрослово успешно обнаружено, когда корреляционное значение между последовательностью символов, представленной сигналом основной полосы частот, демодулированным на этапе демодуляции, и синхрословом сравнивают с первым пороговым значением, определенным заранее, и оценивают, что корреляционное значение превышает первое пороговое значение, а когда выполняют вторую операцию обнаружения, оценивают, что синхрослово и предслово успешно обнаружены, когда сумму корреляционного значения между последовательностью символов, представленной сигналом основной полосы частот, демодулированным на этапе демодуляции, и синхрословом и корреляционного значения между последовательностью символов, представленной сигналом основной полосы частот, демодулированным на этапе демодуляции, и предсловом сравнивают со вторым пороговым значением, определенным заранее, и оценивают, что сумма превышает второе пороговое значение.
Желательно, чтобы кадр, переданный по каналу управления, и кадр, переданный по физическому каналу связи, предоставленному базовой станцией в радиоканале, передавались с одинаковым хронированием.
Краткое описание чертежей
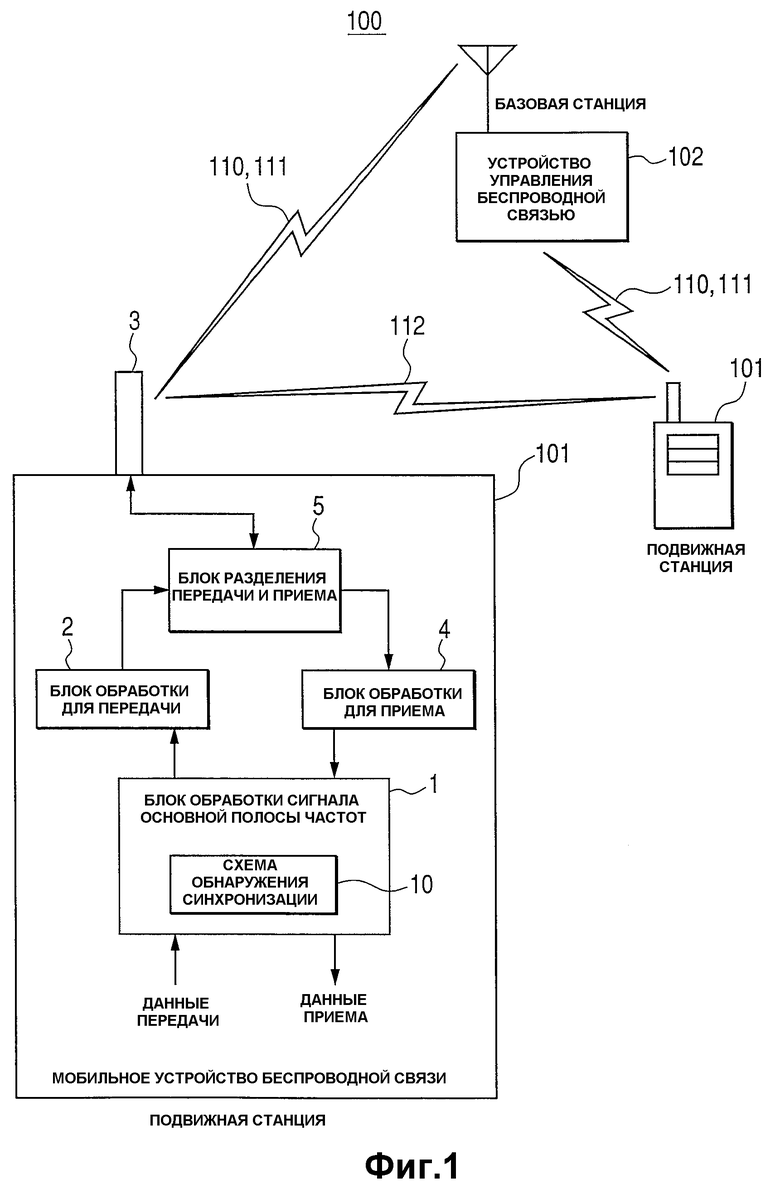
Фиг.1 - схема, показывающая пример структуры системы мобильной беспроводной связи, согласно варианту осуществления изобретения;
Фиг.2 - схема, показывающая пример структуры кадра в цифровых данных, переданных в каждом из канала управления, физического канала связи и прямого канала связи;
Фиг.3 - схема, показывающая пример структуры схемы обнаружения синхронизации;
Фиг.4 - схема, показывающая пример структуры устройства управления беспроводной связью;
Фиг.5 - таблица, показывающая пример настройки для достижения синхронизации в мобильном устройстве беспроводной связи;
Фиг.6 - схема для пояснения конкретного примера арифметической обработки, выполненной для установления синхронизации;
Фиг.7 - схема для пояснения конкретного примера операции для достижения синхронизации, используя только синхрослово;
Фиг.8 - схема для пояснения конкретного примера операции для достижения синхронизации, используя и предслово, и синхрослово;
Фиг. 9 - схема, показывающая пример формата кадра в предшествующем уровне техники.
Преимущества изобретения
Согласно настоящему изобретению можно быстро устанавливать линию связи путем сокращения синхрослова и выполнять обнаружение синхронизации с высокой точностью.
Наилучший вариант осуществления изобретения
Система 100 мобильной беспроводной связи согласно варианту осуществления изобретения будет объясняться ниже подробно со ссылкой на чертежи. Эта система 100 мобильной беспроводной связи включает в себя, например, как показано на фиг. 1, множество мобильных устройств 101 беспроводной связи, служащих в качестве подвижных станций, и по меньшей мере одно (вообще, несколько) устройство 102 управления беспроводной связью, служащее в качестве базовой станции. На фиг. 1, в качестве примера, показаны два мобильных устройства 101 беспроводной связи и одно устройство 102 управления беспроводной связью. Например, система 100 мобильной беспроводной связи должна только быть наземной системой мобильной беспроводной связи в составе системы большой области, в которой устройство 102 управления беспроводной связью, служащее в качестве базовой станции, охватывает широкую область по сравнению с системой из микросот, например PDC.
Каждое из мобильных устройств 101 беспроводной связи позволяет выполнять речевой вызов (разговор) с другими мобильными устройствами 101 беспроводной связи, другими терминалами связи, подключенными по сети к устройству 102 управления беспроводной связью, и т.п., путем передачи и приема радиочастотного (RF) сигнала между мобильным устройством 101 беспроводной связи и устройством 102 управления беспроводной связью, служащим в качестве базовой станции. В беспроводном обмене информацией между каждым из мобильных устройств 101 беспроводной связи и устройством 102 управления беспроводной связью используются канал 110 управления и физический канал 111 связи. Каждое из мобильных устройств 101 беспроводной связи может напрямую передавать и принимать RF-сигнал между мобильным устройством 101 беспроводной связи и другими мобильными устройствами 101 беспроводной связи без вмешательства базовой станции и выполнять речевой вызов и т.п. путем использования прямого канала 112 связи.
В радиоканалах, таких как канал 110 управления, физический канал 111 связи и прямой канал 112 связи, передается RF-сигнал, модулированный посредством заданной системы цифровой модуляции (например, квадратурной FSK [частотная манипуляция]), посредством чего цифровые данные имеют заданную структуру кадра. Фиг. 2(A)-2(C) являются схемами, показывающими пример структуры кадра в цифровых данных, переданных по каждому из канала 110 управления, физического канала 111 связи и прямого канала 112 связи.
Цифровые данные, имеющие структуры кадра, показанные на фиг. 2(A) и 2(B), передаются от устройства 102 управления беспроводной связью, служащего в качестве базовой станции, к каждому из мобильных устройств 101 беспроводной связи. Длина кадра в цифровых данных, переданных от устройства 102 управления беспроводной связью, устанавливается равной 80 мс, и скорость передачи (скорость) цифровых данных устанавливается равной 4800 бит/с. Как показано на фиг. 2(А), по каналу 110 управления передаются цифровые данные со структурой кадра, в которой синхрослово SW из 20 битов, образованное посредством заданной кодовой комбинации, размещается в начале кадра, и завершающее поле PF из 20 битов размещается в конце кадра. В этой структуре, по сравнению со стандартом ARIB STD-T61, скорость передачи (скорость) равна половине от таковой в стандарте ARIB STD-T61 и длина кадра в два раза больше, чем в стандарте ARIB STD-T61. С другой стороны, синхрослово SW имеет 20 битов на 80 мс, что равно половине от стандарта ARIB STD-T61.
Устройство 102 управления беспроводной связью последовательно отправляет цифровые данные, имеющие показанную на фиг. 2(А) структуру кадра, посредством множества кадров, используя канал 110 управления. Поэтому перед синхрословом SW каждого из кадров завершающее поле PF размещается в кадре, отправленном непосредственно перед этим кадром.
Как показано на фиг. 2(В), по физическому каналу 111 связи передаются цифровые данные со структурой кадра, в которой синхрослово SW размещается в начале кадра, и, с другой стороны, не содержится завершающее поле PF, в отличие от канала 110 управления. Как показано на фиг. 2(С), по прямом каналу 112 связи передаются цифровые данные со структурой кадра, в которой заголовок PA из 20 битов размещается перед кадром в начале передачи, и синхрослово SW из 20 битов размещается в начале каждого из кадров (следуя за заголовком PA в кадре в начале передачи).
Завершающее поле PF, включенное в кадр, показанный на фиг. 2(А), и заголовок PA, включенный в кадр, показанный на фиг. 2(С), составлены предсловом PW, образованным одинаковой кодовой комбинацией. Предслово PW должно быть, например, только предсловом, определенным заранее как кодовая комбинация, отличная от синхрослова PW. В качестве примера, все завершающие поля PF и заголовки PA должны быть составлены только одинаковым предсловом PW. В качестве другого примера предслово PW, служащее в качестве одинакового кода, может включаться в несколько битов в последних половинах в завершающем поле PF и заголовке PA.
Когда каждое из мобильных устройств 101 беспроводной связи выполняет обмен информацией через базовую станцию, используется система FDMA (коллективный доступ с разделением каналов по частоте) для выделения физического канала 111 связи из канала 110 управления, предоставленного устройством 102 управления беспроводной связью, служащим в качестве базовой станции. С другой стороны, когда множество (например, два) мобильных устройств 101 беспроводной связи напрямую выполняют обмен информацией без вмешательства базовой станции, используется система SCPC (один канал на несущую) без выделения.
Каждое из мобильных устройств 101 беспроводной связи имеет в основном одинаковую конструкцию. Например, как показано на фиг. 1, мобильное устройство 101 беспроводной связи включает в себя блок 1 обработки сигнала основной полосы частот, блок 2 обработки для передачи, антенну 3, блок 4 обработки для приема и блок 5 разделения передачи и приема.
В блок 1 обработки сигнала основной полосы частот вводятся данные передачи из внешней среды, и блок формирует сигнал основной полосы частот для цифровой передачи, в блок вводится сигнал основной полосы частот от блока 4 обработки для приема, блок 1 извлекает данные приема и выводит данные приема во внешнюю среду. Данные передачи, введенные в блок 1 обработки сигнала основной полосы частот, могут быть данными передачи, собранными из внешней среды мобильного устройства 101 беспроводной связи, либо могут быть данными передачи, сформированными непоказанным блоком обработки данных в мобильном устройстве 101 беспроводной связи. Например, мобильное устройство 101 беспроводной связи может включать в себя блок обработки данных или т.п., который формирует информационные данные, указывающие звук и изображение, собранные из внешней среды.
Блок 2 обработки для передачи является блоком для формирования радиосигнала для передачи, соответствующего сигналу основной полосы частот для цифровой передачи, сформированному блоком 1 обработки сигнала основной полосы частот. Например, блок 2 обработки для передачи выполняет заданную цифровую модуляцию (например, модуляцию с квадратурной FSK [частотной манипуляцией]) в ответ на сигнал основной полосы частот для цифровой передачи. Блок 2 обработки для передачи выполняет преобразование частоты (повышающее преобразование), усиление мощности и т.п. для модулированного сигнала, сформированного посредством операции модуляции, и затем доставляет модулированный сигнал антенне 3 через блок 5 разделения передачи и приема, чтобы заставить мобильное устройство 101 беспроводной связи отправить радиосигнал.
Блок 4 обработки для приема применяет малошумящее усиление, преобразование частоты (понижающее преобразование) и т.п. к сигналу приема, принятому антенной 3, и затем выполняет заданную цифровую демодуляцию, чтобы восстановить сигнал основной полосы частот. Сигнал основной полосы частот, восстановленный блоком 4 обработки для приема, доставляется блоку 1 обработки сигнала основной полосы частот. Блок 5 разделения приема и передачи является дуплексером, который предотвращает выход блока 2 обработки для передачи от проникновения части блока 4 обработки для приема и предотвращает вход блока 4 обработки для приема от проникновения части блока 2 обработки для передачи.
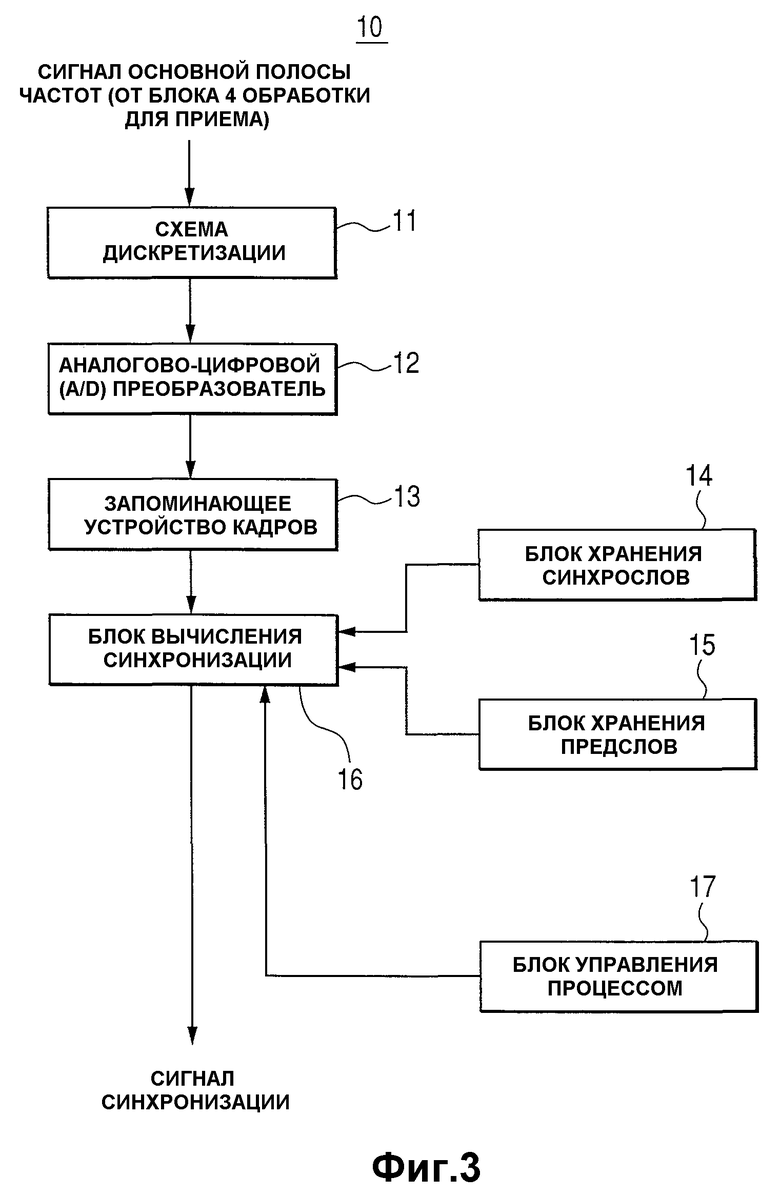
В описанной выше структуре блок 1 обработки сигнала основной полосы частот включает в себя схему 10 обнаружения синхронизации, на которую подается сигнал основной полосы частот от блока 4 обработки для приема. Фиг. 3 - схема, показывающая пример структуры схемы 10 обнаружения синхронизации. Как показано на фиг. 3, схема 10 обнаружения синхронизации включает в себя схему 11 дискретизации, аналого-цифровой (A/D) преобразователь 12, запоминающее устройство 13 кадров, блок 14 хранения синхрослов, блок 15 хранения предслов, блок 16 вычисления синхронизации и блок 17 управления процессом.
Схема 11 дискретизации является схемой для дискретизации сигнала основной полосы частот, введенного от блока 4 обработки для приема на заданной частоте дискретизации. Например, в схеме 11 дискретизации частота дискретизации должна быть только установлена заранее из условия, что один символ в информационной последовательности символов, переданной посредством сигнала основной полосы частот, может быть дискретизирован много раз. Аналого-цифровой преобразователь 12 преобразует сигнал основной полосы частот, дискретизированный схемой 11 дискретизации, в цифровые данные. Цифровые данные, сформированные аналого-цифровым преобразователем 12, сохраняются в запоминающем устройстве 13 кадров. Запоминающее устройство 13 кадров временно хранит цифровые данные, сформированные аналого-цифровым преобразователем 12, например, по системе FIFO (первым пришел - первым обслужен).
Блок 14 хранения синхрослов заранее сохранил в себе данные, указывающие кодовые комбинации синхрослов SW, включенных в соответствующие кадры канала 110 управления, физического канала 111 связи и прямого канала 112 связи, показанных на фиг. 2(A)-2(C). Блок 15 хранения предслов заранее сохранил в себе данные, указывающие кодовые комбинации предслов PW, использованных в завершающем поле PF, включенном в кадр канала 110 управления, показанного на фиг. 2(А), и заголовке PA, включенном в кадр прямого канала 112 связи, показанного на фиг. 2(С).
Блок 16 вычисления синхронизации выполняет арифметическую обработку для установления побитовой синхронизации и кадровой синхронизации исходя из цифровых данных, сохраненных в запоминающем устройстве 13 кадров, и данных, сохраненных в блоке 14 хранения синхрослов, либо данных, сохраненных в блоке 15 хранения предслов. Например, блок 16 вычисления синхронизации выполняет вычисление корреляции на основе цифровых данных, сохраненных в запоминающем устройстве 13 кадров, и данных, сохраненных в блоке 14 хранения синхрослов, либо данных, сохраненных в блоке 15 хранения предслов, и приходит к выводу, превышает ли корреляционное значение, полученное как результат вычисления, заданное пороговое значение. Блок 16 вычисления синхронизации выводит заданный сигнал синхронизации в моменты времени, когда корреляционное значение превышает заданное пороговое значение и принимает максимальное значение. Сигнал синхронизации, выведенный из блока 16 вычисления синхронизации, используется для обработки цифровых данных с некоторой структурой кадра, например, в блоке 1 обработки сигнала основной полосы частот и других схемах цифровой обработки сигнала.
Блок 17 управления процессом управляет действиями соответствующих участков в блоке 1 обработки сигнала основной полосы частот исходя из состояния связи, состояния процесса и т.п. в мобильном устройстве 101 беспроводной связи. Например, блок 17 управления процессом выполняет переключение для настройки арифметической обработки, запущенной блоком 16 вычисления синхронизации для установления синхронизации, в качестве арифметической обработки, использующей данные, сохраненные в блоке 14 хранения синхрослов, либо арифметической обработки, использующей данные, сохраненные как в блоке 14 хранения синхрослов, так и в блоке 15 хранения предслов.
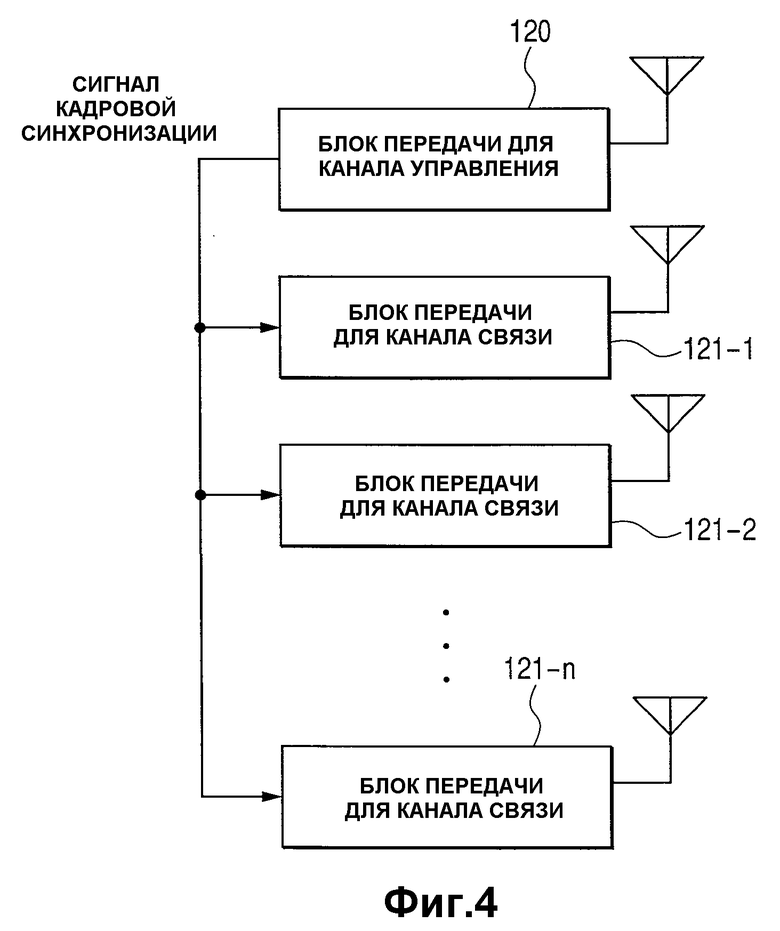
Устройство 102 управления беспроводной связью, показанное на фиг. 1, включает в себя, например, как показано на фиг. 4, блок 120 передачи для канала управления и множество блоков 121-1 - 121-n передачи для канала связи (n есть целое число, больше либо равное 2). Блок 120 передачи для канала управления отправляет, используя канал 110 управления, RF-сигнал для передачи цифровых данных к каждому из мобильных устройств 101 беспроводной связи. Каждый из блоков 121-1 - 121-n передачи для канала связи отправляет, используя физический канал 111 связи, RF-сигнал для передачи цифровых данных к каждому из мобильных устройств 101 беспроводной связи. Сигнал кадровой синхронизации для синхронизации кадров, переданных по каналу 110 управления и физическому каналу 111 связи, отправляется из блока 120 передачи для канала управления к каждому из блоков 121-1 - 121-n передачи для канала связи. Согласно этому сигналу кадровой синхронизации кадр из канала 110 управления и кадр из физического канала 111 связи отправляются с одинаковым хронированием, как указано пунктирной линией на фиг. 2(A) и 2(B).
Действие мобильного устройства 101 беспроводной связи для достижения синхронизации в системе 100 мобильной беспроводной связи согласно варианту осуществления изобретения будет пояснено ниже. В качестве состояния процесса (состояния синхронизации) относительно синхронизации в мобильном устройстве 101 беспроводной связи существуют три состояния процесса, а именно состояние начальной синхронизации для установления побитовой синхронизации и кадровой синхронизации, состояние поддержания синхронизации для поддержания кадровой синхронизации после установления синхронизации и состояние повторной синхронизации для установления синхронизации снова, после того как синхронизация однажды сбрасывается. В каждом из мобильных устройств 101 беспроводной связи состояние процесса относительно синхронизации задается блоком 17 управления процессом, включенным в схему 10 обнаружения синхронизации, согласно состоянию связи и т. п., и деятельность блока 16 вычисления синхронизации управляется согласно заданному состоянию процесса.
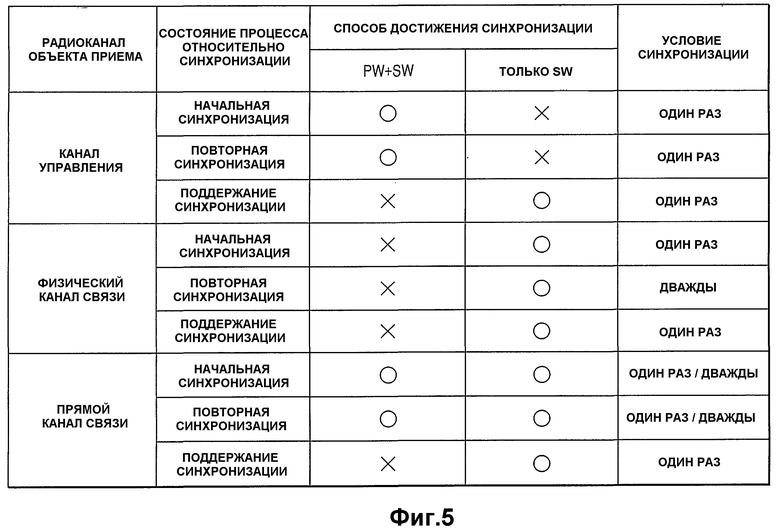
Конкретнее, блок 17 управления процессом выполняет оценку того, достигается ли синхронизация с использованием только синхрослова SW по состоянию синхронизации относительно заданной синхронизации либо синхронизация достигается с использованием как синхрослова SW, так и предслова PW. Фиг. 5 - таблица, показывающая отношение соответствия между радиоканалом как объектом приема, состоянием процесса относительно синхронизации в мобильном устройстве 101 беспроводной связи, способом достижения синхронизации и условием синхронизации для оценки того, что синхронизация установлена.
Как показано на фиг. 5, в случае, в котором канал 110 управления является объектом приема, когда состоянием процесса является состояние начальной синхронизации либо состояние повторной синхронизации, блок 17 управления процессом выполняет вхождение в синхронизацию, используя как предслово PW, так и синхрослово SW. Так как это в основном эквивалентно обнаружению кадровой синхронизации с использованием длинной кодовой комбинации, как, например, синхрослова SW, то точность синхронизации повышается. Таким образом, в этом случае в качестве условия синхронизации, когда результат вычисления в блоке 16 вычисления синхронизации только один раз превышает заданное пороговое значение, блоку 17 управления процессом необходимо лишь оценить, что и предслово PW, и синхрослово SW успешно обнаруживаются один раз, и считать, что синхронизация установлена. Необходимо только, чтобы условие синхронизации было изменяемым согласно спецификациям системы 100 мобильной беспроводной связи и устанавливается обязательно меньшим по числу раз в сравнении с таковым в предшествующем уровне техники.
В случае, в котором канал 110 управления является объектом приема, когда состоянием процесса является состояние поддержания синхронизации, вхождение в кадровую синхронизацию уже завершено на стороне мобильного устройства 101 беспроводной связи. Следовательно, блоку 17 управления процессом необходимо только подтверждать, что синхрослово SW каждого из кадров успешно принимается с определенным заранее хронированием. Таким образом, в этом случае блоку 17 управления процессом необходимо только выполнять вхождение в синхронизацию, используя только синхрослово SW, и, в качестве условия синхронизации, когда результат вычисления только один раз превышает заданное пороговое значение, оценить, что синхрослово SW успешно обнаруживается, и считать, что синхронизация поддерживается.
В случае, в котором физический канал 111 связи является объектом приема, блок 17 управления процессом выполняет вхождение в синхронизацию, используя только синхрослово SW, независимо от состояния процесса относительно синхронизации. Раздел, включающий в себя предслово PW, не размещается в кадре физического канала 111 связи, как показано на фиг. 2(В). С другой стороны, как показано на фиг. 4, поскольку сигнал кадровой синхронизации отправляется из блока 120 передачи для канала управления к соответствующим блокам 121-1 - 121-n передачи для канала связи, кадр канала 110 управления и кадр физического канала 111 связи отправляются с одинаковым хронированием. Следовательно, когда объект приема сдвигается из канала 110 управления в физический канал 111 связи в мобильном устройстве 101 беспроводной связи, если физический канал 111 связи принимается с той же кадровой синхронизацией, что и хронирование приема канала 110 управления, то можно достичь кадровой синхронизации.
В качестве условия синхронизации в случае, в котором физический канал 111 связи является объектом приема, когда состоянием процесса является состояние начальной синхронизации либо состояние поддержания синхронизации, когда результат вычисления в блоке 16 вычисления синхронизации только один раз превышает заданное пороговое значение, блоку 17 управления процессом необходимо лишь оценивать, что синхрослово успешно обнаруживается, и синхронизация устанавливается (или поддерживается). С другой стороны, в состоянии повторной синхронизации, в котором повторная синхронизация выполняется из-за выхода из синхронизации или во время более позднего участия в групповом вызове, точность синхронизации может ухудшаться. Поэтому в этом случае, в качестве условия синхронизации, когда результат вычисления последовательно превышает заданное пороговое значение несколько раз (например, дважды), блоку 17 управления процессом необходимо лишь оценивать, что синхрослово SW успешно обнаруживается несколько раз (например, дважды), и считать, что синхронизация устанавливается. В состоянии повторной синхронизации и во время более позднего участия мобильное устройство 101 беспроводной связи находится в условиях эксплуатации, близких к ограничению, где устанавливается вызов, используя физический канал 111 связи. Следовательно, так как условие синхронизации делается жестким по сравнению с таковым в состоянии начальной синхронизации и состоянии поддержания синхронизации, как описано выше, даже если возникает незначительная задержка в установлении синхронизации, это не приводит к значительной проблеме.
Когда прямой канал 112 связи является объектом приема, заголовок РА, включающий в себя предслово PW, размещается только перед кадром в начале передачи. Соответственно, в качестве способа достижения синхронизации блок 17 управления процессом позволяет использовать как способ использования только синхрослова SW, так и способ использования и предслова PW, и синхрослова SW. Блоку 17 управления процессом необходимо лишь выбирать условие синхронизации в соответствии с использованным способом. В частности, когда используются и предслово PW, и синхрослово SW, блоку 17 управления процессом необходимо лишь оценивать, что и предслово PW, и синхрослово SW успешно обнаруживаются один раз, когда результат вычисления в блоке 16 вычисления синхронизации только один раз превышает заданное пороговое значение, и считать, что синхронизация устанавливается. С другой стороны, когда используется только синхрослово SW, блоку 17 управления процессом необходимо лишь оценивать, что синхрослово SW успешно обнаруживается несколько раз (например, дважды), когда результат вычисления последовательно превышает заданное пороговое значение несколько раз (например, дважды), и считать, что синхронизация устанавливается.
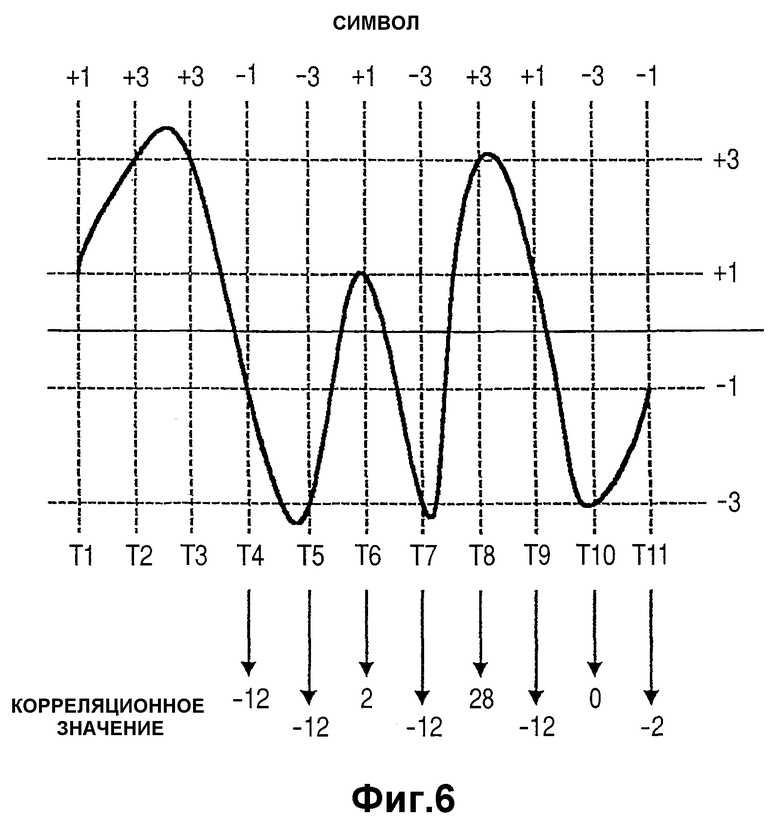
Будет пояснен конкретный пример арифметической обработки, осуществленной для установления синхронизации в блоке 16 вычисления синхронизации. Здесь количество символов синхрослова SW задается как n+1, данные синхрослова SW задаются как S0-Sn, и выборочные данные на несколько символов назад в прошлое от точки приема в сигнале основной полосы частот, демодулированном в мобильном устройстве 101 беспроводной связи, задаются как a1-an. В этом случае корреляционное значение можно получить в соответствии с расчетом, указанным Формулой 1.
Формула 1
В качестве конкретного примера считается, что синхрослова S0-S3 равны соответственно -3, +1, -3 и +3. Допускается, что сигнал основной полосы частот, демодулированный в мобильном устройстве 101 беспроводной связи, имеет форму сигнала, показанную на фиг.6. В примере, показанном на фиг.6, допускается, что дискретизация выполняется один раз для одного символа.
В этом случае корреляционные значения, полученные при хронировании Т4-Т11, сравниваются с определенным заранее пороговым значением. Можно устанавливать кадровую синхронизацию исходя из точки максимума, где корреляционное значение больше, чем пороговое значение. В примере, показанном на фиг.6, поскольку корреляционное значение является наибольшим на «28», можно устанавливать кадровую синхронизацию, оценивая, что хронирование Т8 является хронированием приема для синхрослова SW.
Выборочные данные на двадцать символов назад в прошлое от точки приема в сигнале основной полосы частот, демодулированном в мобильном устройстве 101 беспроводной связи, задаются как a0-a19, синхрослова SW, сохраненные в блоке 14 хранения синхрослов, задаются как S0-S9, и предслова PW, сохраненные в блоке 15 хранения предслов, задаются как Р0-Р9. Пороговое значение для обнаружения синхронизации равно Th1, только когда используется синхрослово SW, и равно Th2, когда используются и предслово PW, и синхрослово SW. Корреляционное значение настолько больше, насколько больше длина слова. Таким образом, заранее выполняется настройка для задания пороговых значений Th1 и Th2 как Th1<Th2.
Когда синхронизация достигается с использованием только синхрослова SW, блок 16 вычисления синхронизации задает корреляционное значение С1 между выборочными данными a10-a19 и данными S0-S9, указывающими синхрослова SW, путем выполнения расчета с использованием Формулы 2.
Формула 2
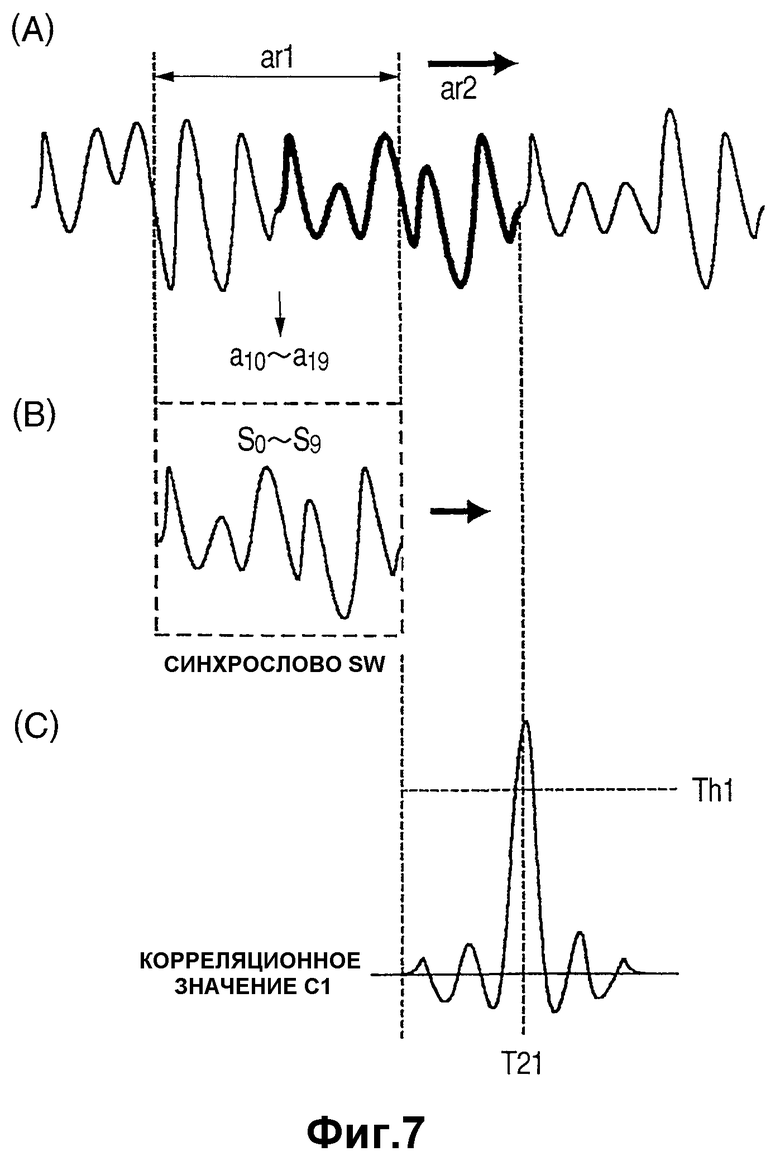
Например, когда сигнал основной полосы частот, показанный на фиг. 7(А), демодулируется блоком 4 обработки для приема, дискретизированные схемой 11 дискретизации данные в периоде, указанном стрелкой ar1, последовательно сохраняются в запоминающем устройстве 13 кадров в качестве выборочных данных a10-a19. Данные S0-S9, указывающие кодовую комбинацию, соответствующую форме сигнала синхрослова SW, показанной на фиг. 7(В), сохраняются заранее в блоке 14 хранения синхрослов. Блок 16 вычисления синхронизации выполняет арифметическую обработку для задания корреляционного значения С1 между выборочными данными a10-a19, сохраненными в запоминающем устройстве 13 кадров, и данными S0-S9, указывающими синхрослова SW, сохраненные в блоке 14 хранения синхрослов. Период, указанный стрелкой ar1, смещается в положительном направлении (в обратном направлении по оси времени), как истекает время, что указано стрелкой ar2 на фиг. 7(А). Выборочные данные сохраняются в запоминающем устройстве 13 кадров в системе FIFO.
Корреляционное значение С1, заданное блоком 16 вычисления синхронизации, колеблется в соответствии с истечением времени, как показано на фиг. 7(С). При хронировании Т21, когда корреляционное значение С1 превышает пороговое значение Th1, делается вывод, что принимается синхрослово SW. Это позволяет устанавливать кадровую синхронизацию.
Когда синхронизация достигается с использованием и предслова PW, и синхрослова SW, блок 16 вычисления синхронизации задает корреляционное значение С1 между выборочными данными a10-a19 и данными S0-S9, указывающими синхрослова SW, путем выполнения расчета с использованием Формулы 2. Блок 16 вычисления синхронизации задает корреляционное значение С2 между выборочными данными a0-a9 и данными P0-P9, указывающими предслова PW, путем выполнения расчета с использованием Формулы 3.
Формула 3
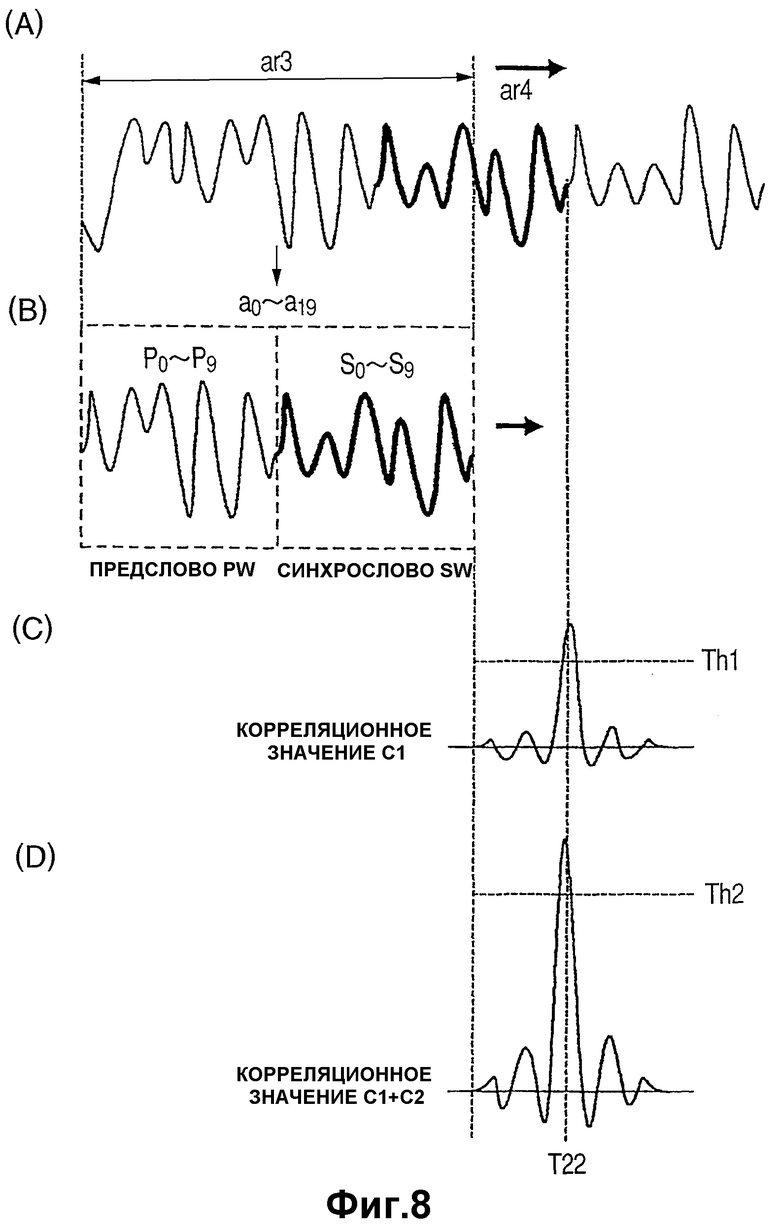
Например, когда сигнал основной полосы частот, показанный на фиг. 8(А), демодулируется блоком 4 обработки для приема, дискретизированные схемой 11 дискретизации данные в периоде, указанном стрелкой ar3, последовательно сохраняются в запоминающем устройстве 13 кадров в качестве выборочных данных a0-a19. Период, указанный стрелкой ar3, смещается в положительном направлении (в обратном направлении по оси времени), как истекает время, что указано стрелкой ar4 на фиг. 8(А). Данные S0-S9, указывающие кодовую комбинацию, соответствующую форме сигнала синхрослова SW, показанной на фиг. 8(В), сохраняются заранее в блоке 14 хранения синхрослов. Данные P0-P9, указывающие кодовую комбинацию, соответствующую форме сигнала предслова PW, показанного на фиг. 8(В), сохраняются заранее в блоке 15 хранения предслов.
Блок 16 вычисления синхронизации выполняет арифметическую обработку для задания корреляционного значения С2 между выборочными данными a0-a9, сохраненными в запоминающем устройстве 13 кадров, и данными P0-P9, указывающими предслова PW, сохраненные в блоке 15 хранения предслов. В то же время блок 16 вычисления синхронизации выполняет арифметическую обработку для задания корреляционного значения С1 между выборочными данными a10-a19, сохраненными в запоминающем устройстве 13 кадров, и данными S0-S9, указывающими синхрослова SW, сохраненные в блоке 14 хранения синхрослов. Корреляционное значение С1, заданное блоком 16 вычисления синхронизации, колеблется в соответствии с истечением времени, как показано на фиг. 8(С). Сумма C1+C2 корреляционного значения C1 и корреляционного значения C2 также колеблется в соответствии с истечением времени, как показано на фиг. 8(D). При хронировании Т22, когда значение C1+C2 превышает пороговое значение Th2, делается вывод, что принимается синхрослово SW. Это позволяет устанавливать кадровую синхронизацию.
В случае, в котором канал 110 управления является объектом приема, когда мобильное устройство 101 беспроводной связи находится в состоянии начальной синхронизации для установления синхронизации, необходимо лишь выполнять обработку для достижения синхронизации с использованием как предслова PW, так и синхрослова SW. Таким образом, как показано на фиг. 8(A)-8(C), точка максимума, в которой значение суммы C1+C2 корреляционных значений превышает пороговое значение Th2, задается в качестве точки синхронизации. Это позволяет устанавливать синхронизацию.
В случае, в котором прямой канал 112 связи является объектом приема, когда мобильное устройство 101 беспроводной связи находится в состоянии начальной синхронизации, необходимо принимать во внимание как обработку для достижения синхронизации с использованием и предслова PW, и синхрослова SW, так и обработку для достижения синхронизации с использованием только синхрослова SW. В этом случае, как и в вышеупомянутом случае, можно задавать точку синхронизации исходя из сравнения корреляционного значения C1 и порогового значения Th1 и сравнения суммы C1+C2 корреляционных значений и порогового значения Th2. Путем задания точки синхронизации в соответствии с таким простым расчетом можно управлять увеличением количества обработки в арифметической обработке блоком 16 вычисления синхронизации. Когда корреляционное значение C1 превышает пороговое значение Th1 и достигает максимального значения и сумма C1+C2 корреляционных значений превышает пороговое значение Th2 и достигает максимального значения, необходимо лишь применять предпочтительно условие синхронизации во вхождении в синхронизацию с использованием как предслова PW, так и синхрослова SW, для оценки того, что синхронизация устанавливается, когда, например, сумма превышает пороговое значение Th2 только один раз.
Длина слова в синхрослове может быть сокращена для преодоления сужения полосы радиоканала и большой области. В изобретении, даже когда синхрослово уменьшается до 20 битов на 80 секунд, синхронизация достигается с использованием как предслова PW, так и синхрослова SW либо с использованием только синхрослова SW согласно состоянию процесса относительно синхронизации в мобильном устройстве 101 беспроводной связи соответственно. Следовательно, даже когда длина слова в синхрослове сокращается, можно выполнять обнаружение синхронизации с высокой точностью. Так как длина слова в синхрослове уменьшается, можно быстро устанавливать линию связи между мобильным устройством 101 беспроводной связи и устройством 102 управления беспроводной связью и среди множества мобильных устройств 101 беспроводной связи.
Когда синхронизация устанавливается или поддерживается с использованием только синхрослова SW, можно уменьшать количество обработки и управлять потребляемой мощностью путем выполнения арифметической обработки для сравнения корреляционного значения C1 и порогового значения Th1 в блоке 16 вычисления синхронизации. Кроме того, кадр из канала 110 управления и кадр из физического канала 111 связи отправляются с одинаковым хронированием. Раздел, включающий в себя предслово PW, не размещается в кадре физического канала 111 связи. Кроме того, заголовок РА, включающий в себя предслово PW только в начале передачи, размещается в кадре прямого канала 112 связи. Заголовок PA не размещается в кадре, отправленном после него. Следовательно, в физическом канале 111 связи и прямом канале 112 связи, которые подвержены ограничению вследствие скорости передачи информации (пропускной способности), можно уменьшать количество данных, переданных для управления, и ослаблять ограничение вследствие скорости передачи информации.
Блок 16 вычисления синхронизации не ограничивается блоком, который выполняет вычисление корреляции для установления синхронизации, и может быть любым блоком, который может выполнять произвольную арифметическую обработку и устанавливать синхронизацию. Например, также возможно, что задаются эвклидовы кодовые расстояния между синхрословами, определенными заранее, и выборочными данными демодулированного сигнала основной полосы частот, и разница между заданными расстояниями возводится в квадрат для добавления некоей величины, соответствующей синхрословам, к расстояниям.
Система 100 мобильной беспроводной связи не ограничивается наземной системой мобильной беспроводной связи в составе системы большой области и может быть системой из микросот. Кроме того, система модуляции не ограничивается системой модуляции с квадратурной FSK и должна быть лишь произвольной системой цифровой многозначной модуляции. Система связи между мобильным устройством 101 беспроводной связи и устройством 102 управления беспроводной связью не ограничивается системой FDMA. Можно с таким же успехом применять изобретение непосредственно к системе TDMA.
Промышленная применимость
Можно предоставить систему мобильной беспроводной связи, которая может устанавливать линию связи путем уменьшения длины синхрослова, чтобы уменьшить время, требуемое для установления синхронизации, и выполнять обнаружение синхронизации с высокой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2009 |
|
RU2511718C2 |
| МОБИЛЬНАЯ СИСТЕМА СВЯЗИ | 1997 |
|
RU2154923C1 |
| КАНАЛ ПОДТВЕРЖДЕНИЯ ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2424621C2 |
| УСТРОЙСТВО БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2480964C2 |
| КАДРИРОВАНИЕ, ДИСПЕТЧЕРИЗАЦИЯ И СИНХРОНИЗАЦИЯ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2016 |
|
RU2694586C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ СИМВОЛЬНОЙ СИНХРОНИЗАЦИИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2425460C2 |
| УСТРОЙСТВО БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2426278C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БЕСПРОВОДНОЙ СВЯЗЬЮ И СПОСОБ БЕСПРОВОДНОЙ СВЯЗИ | 2005 |
|
RU2384015C2 |
| УСТРОЙСТВО БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2483441C2 |
| СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ, УСТРОЙСТВО УПРАВЛЕНИЯ БЕСПРОВОДНОЙ СВЯЗЬЮ, УСТРОЙСТВО БЕСПРОВОДНОЙ СВЯЗИ И СПОСОБ БЕСПРОВОДНОЙ СВЯЗИ | 2005 |
|
RU2391799C2 |
Изобретение относится к мобильному устройству беспроводной связи. Технический результат - повышение точности синхронизации. Для этого как предслово (PW), так и синхрослово (SW) используют для установления синхронизации либо только синхрослово (SW) используют для установления синхронизации в соответствии с состоянием процесса, относящегося к синхронизации в мобильном устройстве беспроводной связи. Например, во время начальной синхронизации с принимаемым каналом (110) управления и предслово (PW), и синхрослово (SW) используют для установления синхронизации, когда результат вычисления в узле вычисления синхронизации только один раз превышает заданное пороговое значение. Во время начальной синхронизации с принимаемым прямым каналом связи и предслово (PW), и синхрослово (SW) используют для установления синхронизации, когда результат вычисления один раз превышает заданное пороговое значение; или в качестве альтернативы только синхрослово (SW) используют для установления синхронизации, когда результат вычисления последовательно превышает заданное пороговое значение дважды. 3 н. и 9 з.п. ф-лы, 9 ил.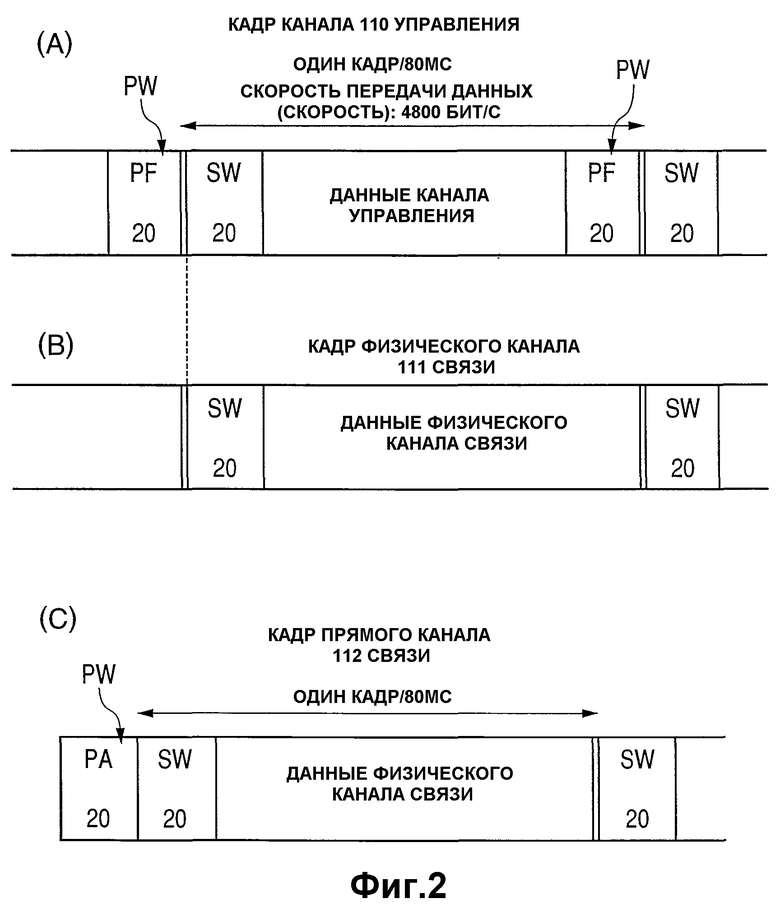
1. Мобильное устройство беспроводной связи, содержащее
блок демодуляции, выполненный с возможностью приема радиосигнала, переданного по заданному радиоканалу, и демодуляции сигнала основной полосы частот; и
блок кадровой синхронизации, выполненный с возможностью обнаружения по меньшей мере заданного синхрослова из последовательности символов, представленной сигналом основной полосы частот, демодулированным блоком демодуляции, и достижения кадровой синхронизации,
причем, когда сигнал основной полосы частот демодулирован блоком демодуляции из радиосигнала, переданного по каналу управления, предоставленному базовой станцией в радиоканале, блок кадровой синхронизации выполняет первую операцию обнаружения для обнаружения, согласно тому, что из следующего: начальная синхронизация, повторная синхронизация или поддержание синхронизации является состоянием синхронизации, только синхрослова из множества кадров, в которых синхрослово, образованное посредством заданной кодовой комбинации, размещено в начале каждого из кадров, и, с другой стороны, завершающее поле, включающее в себя предслово, образованное кодовой комбинацией, отличной от синхрослова, размещено в конце каждого из кадров, и вторую операцию обнаружения для обнаружения как синхрослова, так и предслова.
2. Мобильное устройство беспроводной связи по п.1, в котором, когда сигнал основной полосы частот демодулирован блоком демодуляции из радиосигнала, переданного по каналу управления, блок кадровой синхронизации функционирует для оценки, что кадровая синхронизация успешно достигнута, когда вторая операция обнаружения выполняется, чтобы успешно обнаружить и синхрослово и предслово один раз в случае, в котором состоянием синхронизации является начальная синхронизация или повторная синхронизация, либо первая операция обнаружения выполняется, чтобы успешно обнаружить синхрослово один раз в случае, в котором состоянием синхронизации является поддержание синхронизации.
3. Мобильное устройство беспроводной связи по п.1 или 2, в котором блок кадровой синхронизации выполняет первую операцию обнаружения для обнаружения только синхрослова из множества кадров, в которых синхрослово размещено в начале каждого из кадров, когда сигнал основной полосы частот демодулирован блоком демодуляции из радиосигнала, переданного по физическому каналу связи, предоставленному базовой стацией в радиоканале.
4. Мобильное устройство беспроводной связи по п.3, в котором, когда сигнал основной полосы частот демодулирован блоком демодуляции из радиосигнала, переданного по физическому каналу связи, блок кадровой синхронизации функционирует для оценки, что кадровая синхронизация успешно достигнута, когда синхрослово успешно обнаружено один раз в случае, в котором состоянием синхронизации является начальная синхронизация либо поддержание синхронизации, или, когда синхрослово успешно обнаружено много раз, в случае, в котором состоянием синхронизации является повторная синхронизация.
5. Мобильное устройство беспроводной связи по п.1 или 2, в котором, когда сигнал основной полосы частот демодулирован блоком демодуляции из радиосигнала, переданного по прямому каналу связи между базовой станций и другими подвижными станциями в радиоканале, блок кадровой синхронизации функционирует для выполнения первой операции обнаружения либо второй операции обнаружения из множества кадров, в которых заголовок, включающий в себя предслово, размещен в начале каждого из кадров, и, с другой стороны, синхрослово размещено в каждом из кадров в начале передачи, согласно тому, является ли состоянием синхронизации начальная синхронизация, повторная синхронизация или поддержание синхронизации.
6. Мобильное устройство беспроводной связи по п.5, в котором, когда сигнал основной полосы частот демодулирован блоком демодуляции из радиосигнала, переданного по прямому каналу связи, блок кадровой синхронизации функционирует для оценки, что кадровая синхронизация успешно достигнута, когда синхрослово успешно обнаружено много раз, либо синхрослово и предслово успешно обнаружены один раз в случае, в котором состоянием синхронизации является начальная синхронизация или повторная синхронизация, или когда синхрослово успешно обнаружено один раз в случае, в котором состоянием синхронизации является поддержание синхронизации.
7. Мобильное устройство беспроводной связи по п.1 или 2, в котором, когда выполняется первая операция обнаружения, блок кадровой синхронизации функционирует для оценки, что синхрослово успешно обнаружено, когда блок кадровой синхронизации сравнивает корреляционное значение между последовательностью символов, представленной сигналом основной полосы частот, демодулированным блоком демодуляции, и синхрословом, с первым пороговым значением, определенным заранее, и приходит к выводу, что корреляционное значение превышает первое пороговое значение, а когда выполняется вторая операция обнаружения, приходит к выводу, что синхрослово и предслово успешно обнаружены, когда блок кадровой синхронизации сравнивает сумму корреляционного значения между последовательностью символов, представленной сигналом основной полосы частот, демодулированным блоком демодуляции, и синхрословом и корреляционного значения между последовательностью символов, представленной сигналом основной полосы частот, демодулированным блоком демодуляции, и пределовом со вторым пороговым значением, определенным заранее, и приходит к выводу, что сумма превышает второе пороговое значение, определенное заранее.
8. Мобильное устройство беспроводной связи по п.1 или 2, в котором кадр, переданный по каналу управления, и кадр, переданный по физическому каналу связи, предоставленному базовой станцией в радиоканале, передаются с одинаковым хронированием.
9. Устройство беспроводной связи, которое передает радиосигнал, переданный по заданному радиоканалу, содержащее
первый блок передачи, выполненный с возможностью передачи по каналу управления в радиоканале сигнала беспроводной связи для передачи последовательности символов, в которой во множестве последовательно переданных кадров синхрослово, образованное заданной кодовой комбинацией, размещено в начале каждого из кадров, и, с другой стороны, завершающее поле, включающее в себя предслово, образованное кодовой комбинацией, отличной от синхрослова, размещено в конце каждого из кадров,
второй блок передачи, выполненный с возможностью передачи по физическому каналу связи в радиоканале радиосигнала для передачи последовательности символов, в которой во множестве последовательно переданных кадров синхрослово размещено в начале каждого из кадров, и
третий блок передачи, выполненный с возможностью передачи кадра, переданного по каналу управления, и кадра, переданного по физическому каналу связи, с одинаковым хронированием.
10. Способ обработки информации, осуществляемый мобильным устройством беспроводной связи, которое выполняет беспроводную связь между базовой станцией и любой из других подвижных станций путем передачи и приема радиосигнала, переданного по заданному радиоканалу, при этом упомянутый способ содержит
этап демодуляции, на котором принимают радиосигнал и демодулируют сигнал основной полосы частот; и
этап кадровой синхронизации, на котором обнаруживают по меньшей мере заданное синхрослово из последовательности символов, представленной сигналом основной полосы частот, демодулированным на этапе демодуляции, и достигают кадровой синхронизации, отличающийся тем, что
на этапе кадровой синхронизации,
когда сигнал основной полосы частот демодулирован на этапе демодуляции из радиосигнала, переданного по каналу управления, предоставленному базовой станцией в радиоканале, оценивают, что из множества кадров, в которых синхрослово, образованное заданной кодовой комбинацией, размещено в начале каждого из кадров, и, с другой стороны, завершающее поле, включающее в себя предслово, образованное кодовой комбинацией, отличной от синхрослова, размещено в конце каждого из кадров, кадровая синхронизация успешно достигнута, когда выполняют первую операцию обнаружения для обнаружения только синхрослова, и синхрослово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является начальная синхронизация или повторная синхронизация, либо когда выполняют вторую операцию обнаружения для обнаружения и синхрослова, и предслова, и синхрослово и предслово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является поддержание синхронизации,
когда сигнал основной полосы частот демодулирован на этапе демодуляции из радиосигнала, переданного по физическому каналу связи, предоставленному базовой станцией в радиоканале, оценивают, что из множества кадров, в которых синхрослово размещено в начале каждого из кадров, кадровая синхронизация успешно достигнута, когда синхрослово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является начальная синхронизация или поддержание синхронизации, либо когда синхрослово успешно обнаруживают много раз в случае, в котором состоянием синхронизации является повторная синхронизация, и
когда сигнал основной полосы частот демодулирован на этапе демодуляции из радиосигнала, переданного по прямому каналу связи между базовой станцией и другими подвижными станциями в радиоканале, оценивают, что кадровая синхронизация успешно достигнута, когда синхрослово успешно обнаруживают много раз, либо синхрослово и предслово успешно обнаруживают один раз в случае, в котором состоянием синхронизации является начальная синхронизация или повторная синхронизация, или, когда синхрослово успешно обнаруживают один раз, в случае, в котором состоянием синхронизации является поддержание синхронизации.
11. Способ по п.10, в котором
на этапе кадровой синхронизации,
когда выполняют первую операцию обнаружения, оценивают, что синхрослово успешно обнаружено, когда корреляционное значение между последовательностью символов, представленной сигналом основной полосы частот, демодулированным на этапе демодуляции, и синхрословом сравнивают с первым пороговым значением, определенным заранее, и оценивают, что корреляционное значение превышает первое пороговое значение,
когда выполняют вторую операцию обнаружения, оценивают, что синхрослово и предслово успешно обнаружены, когда сумму корреляционного значения между последовательностью символов, представленной сигналом основной полосы частот, демодулированным на этапе демодуляции, и синхрословом и корреляционного значения между последовательностью символов, представленной сигналом основной полосы частот, демодулированным на этапе демодуляции, и предсловом сравнивают со вторым пороговым значением, определенным заранее, и оценивают, что сумма превышает второе пороговое значение.
12. Способ по п.10 или 11, в котором кадр, переданный по каналу управления, и кадр, переданный по физическому каналу связи, предоставленному базовой станцией в радиоканале, передают с одинаковым хронированием.
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| МОБИЛЬНАЯ СИСТЕМА СВЯЗИ | 1997 |
|
RU2154923C1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| US 6693983 В1, 17.02.2004 | |||
| US 6388997 В1, 14.06.2002 | |||
| ЧЕХОЛ ДЛЯ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2005 |
|
RU2301734C1 |
| Устройство для автоматической переезднойСигНАлизАции | 1979 |
|
SU818938A1 |

