Текст описания приведен в факсимильном виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2008 |
|
RU2484431C2 |
| МНОГОФАЗНЫЙ РАСХОДОМЕР КОРИОЛИСА | 2004 |
|
RU2420715C2 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2008 |
|
RU2497084C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА | 2004 |
|
RU2382989C9 |
| МУЛЬТИФАЗНОЕ ИЗМЕРЕНИЕ | 2011 |
|
RU2541376C2 |
| СИСТЕМА ИСПЫТАНИЯ СКВАЖИНЫ НА ЧИСТУЮ НЕФТЬ И ГАЗ | 2013 |
|
RU2577257C2 |
| РАСХОДОМЕР КОРИОЛИСА ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ МАТЕРИАЛА И СПОСОБ ЭКСПЛУАТАЦИИ РАСХОДОМЕРА КОРИОЛИСА | 1999 |
|
RU2229102C2 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2007 |
|
RU2453816C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИСПЫТАНИЯ СКВАЖИН И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 1996 |
|
RU2168011C2 |
| СПОСОБ КОРРЕКТИРОВКИ ПЕРЕМЕННОЙ РАСХОДОМЕРА | 2020 |
|
RU2800929C1 |
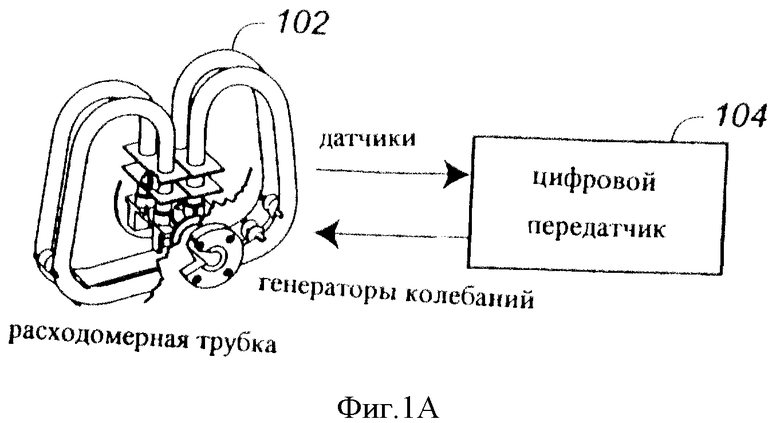
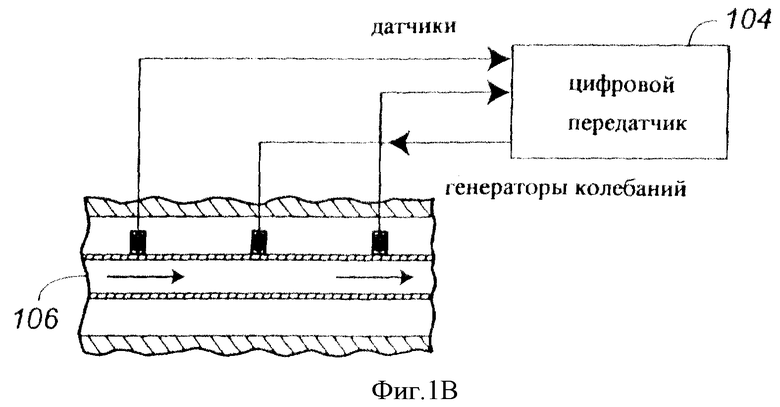

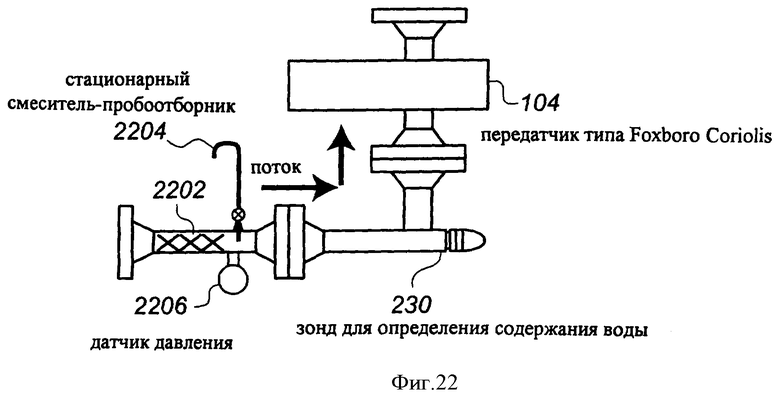
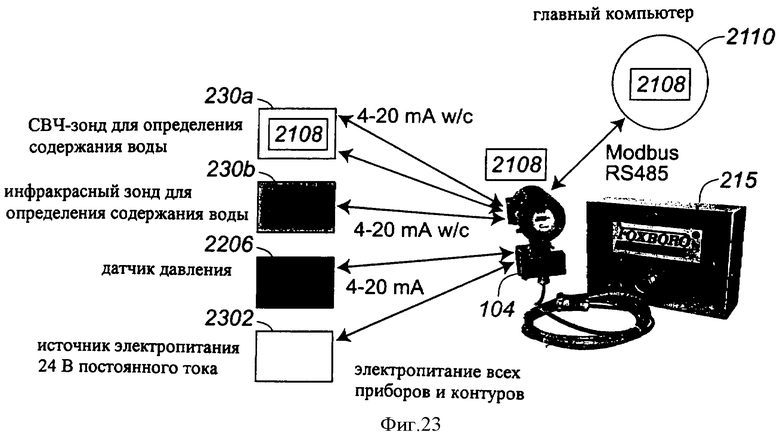
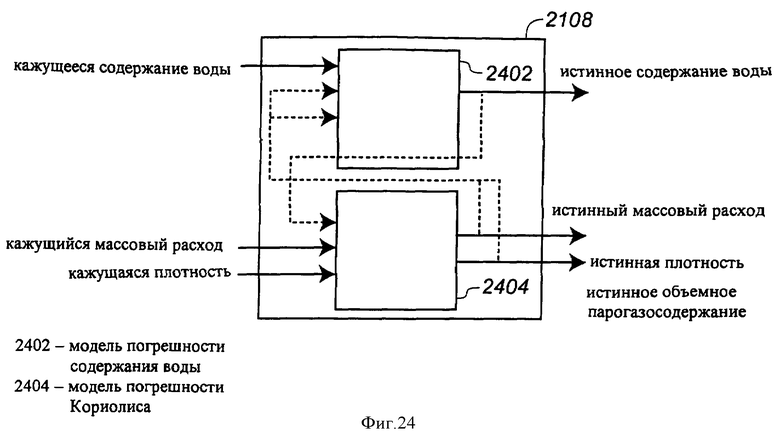
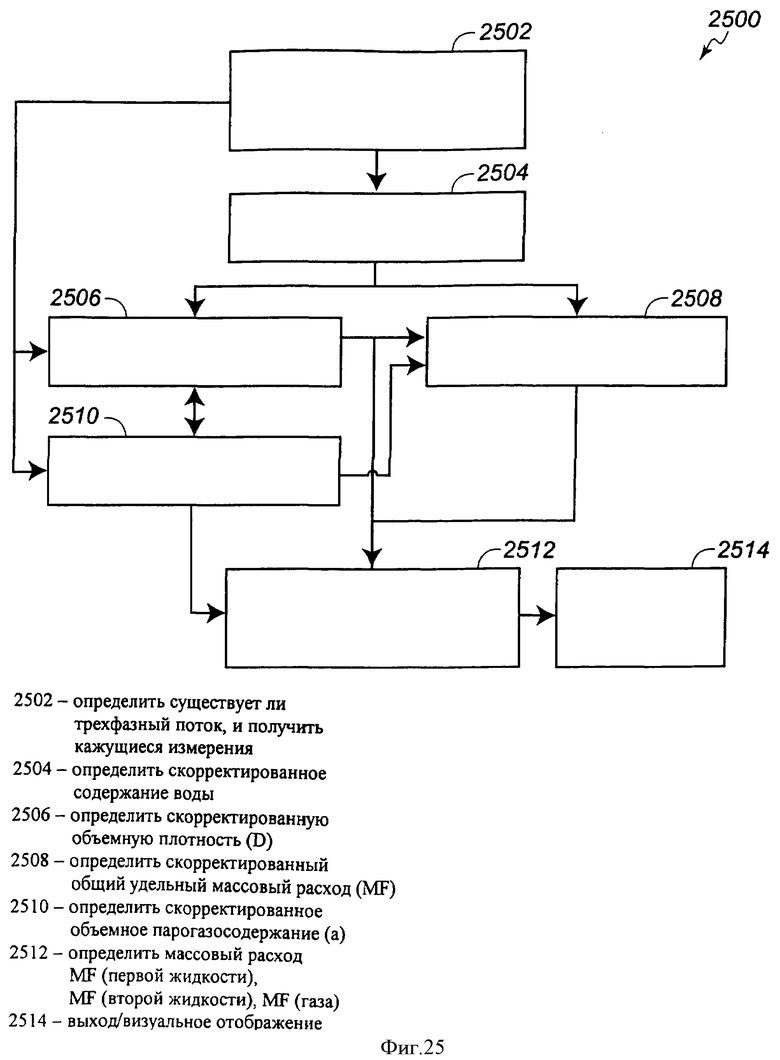
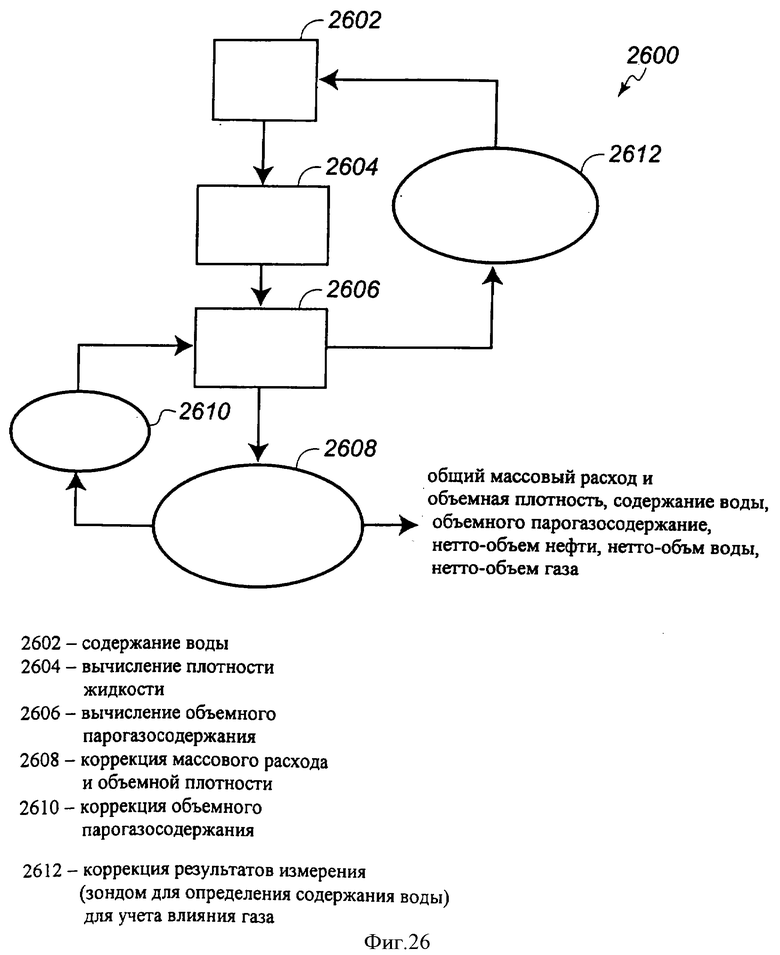
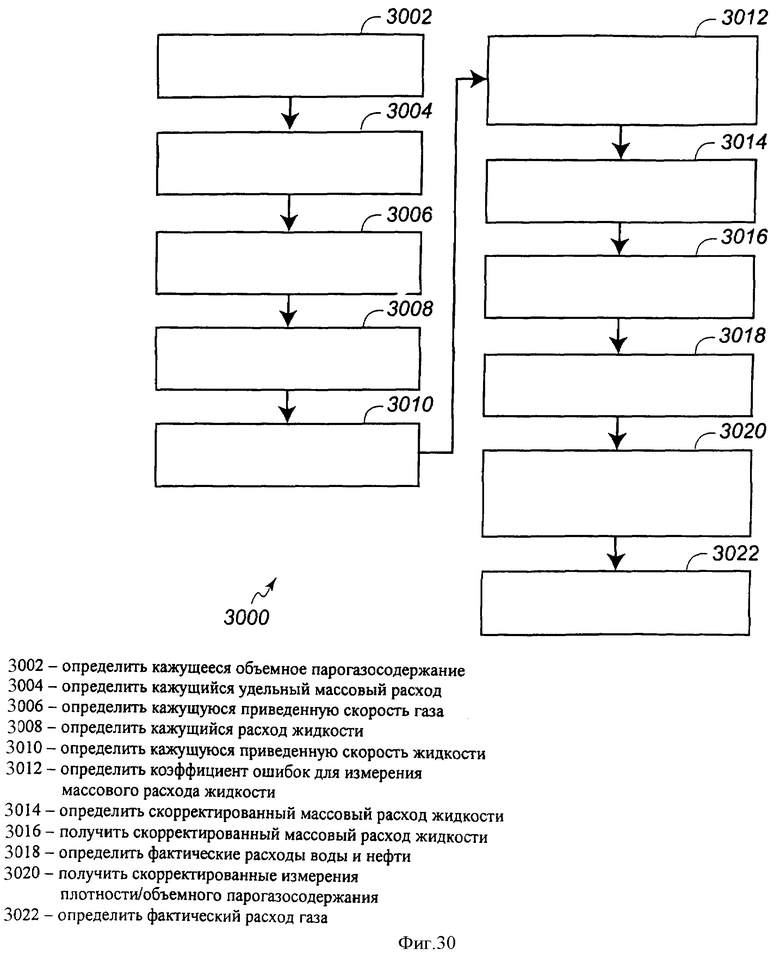
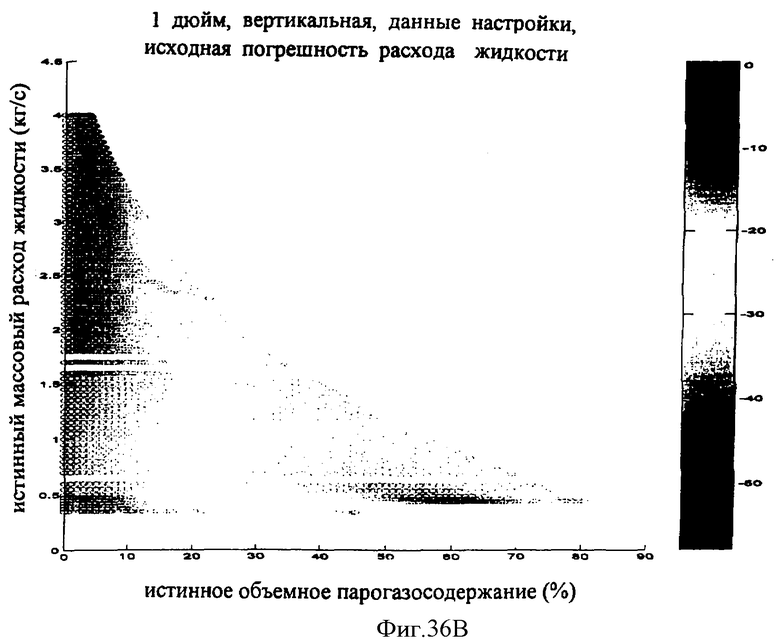
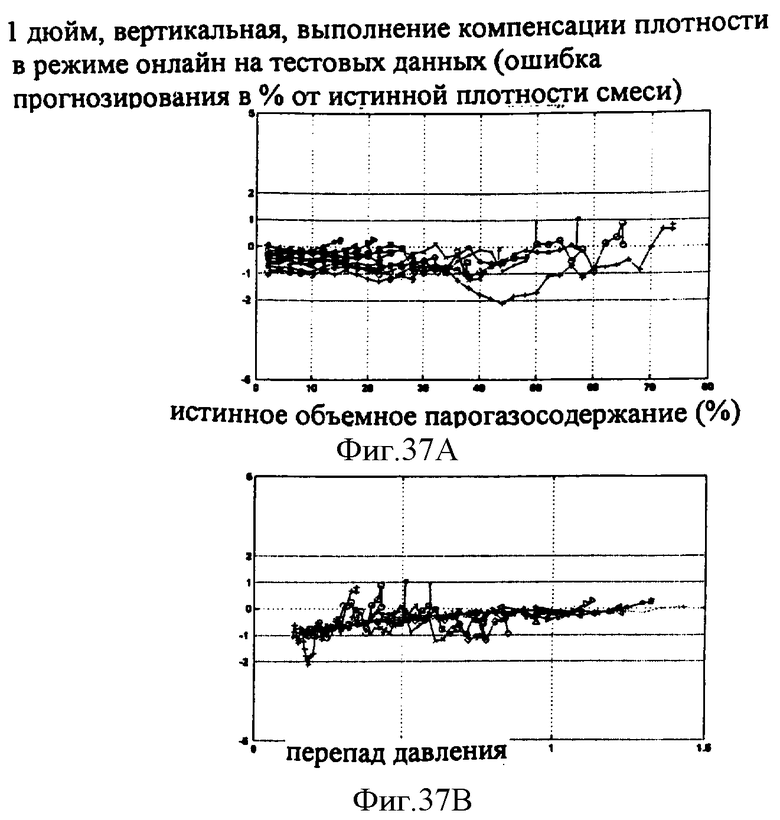
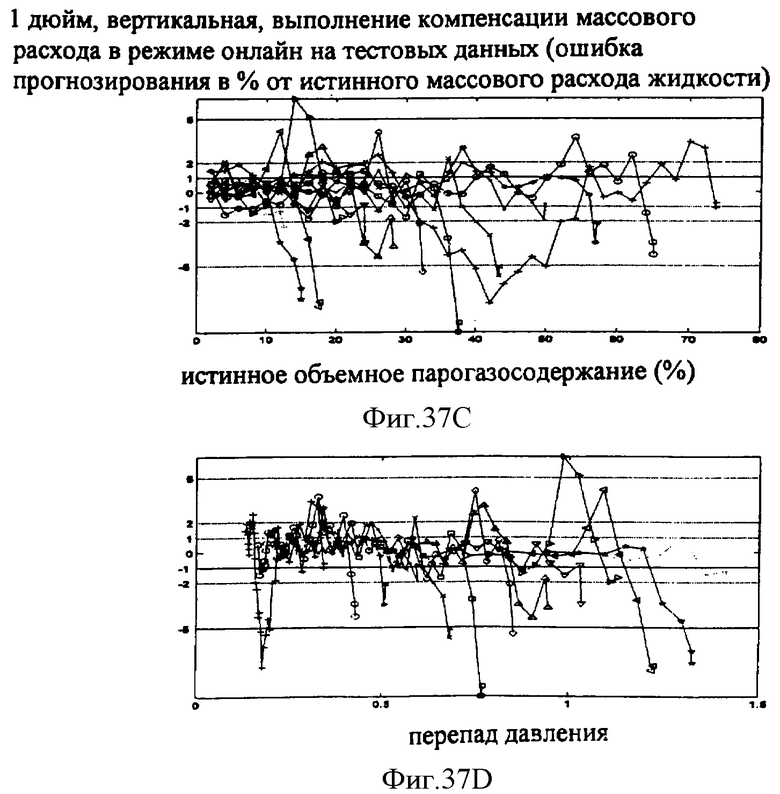
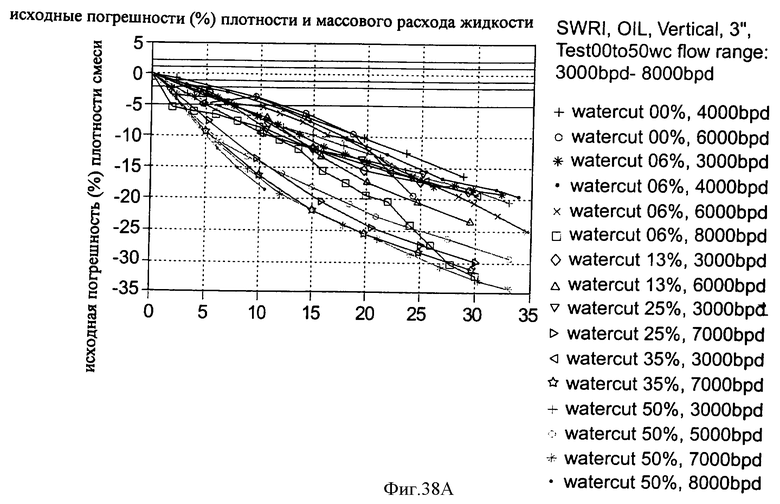
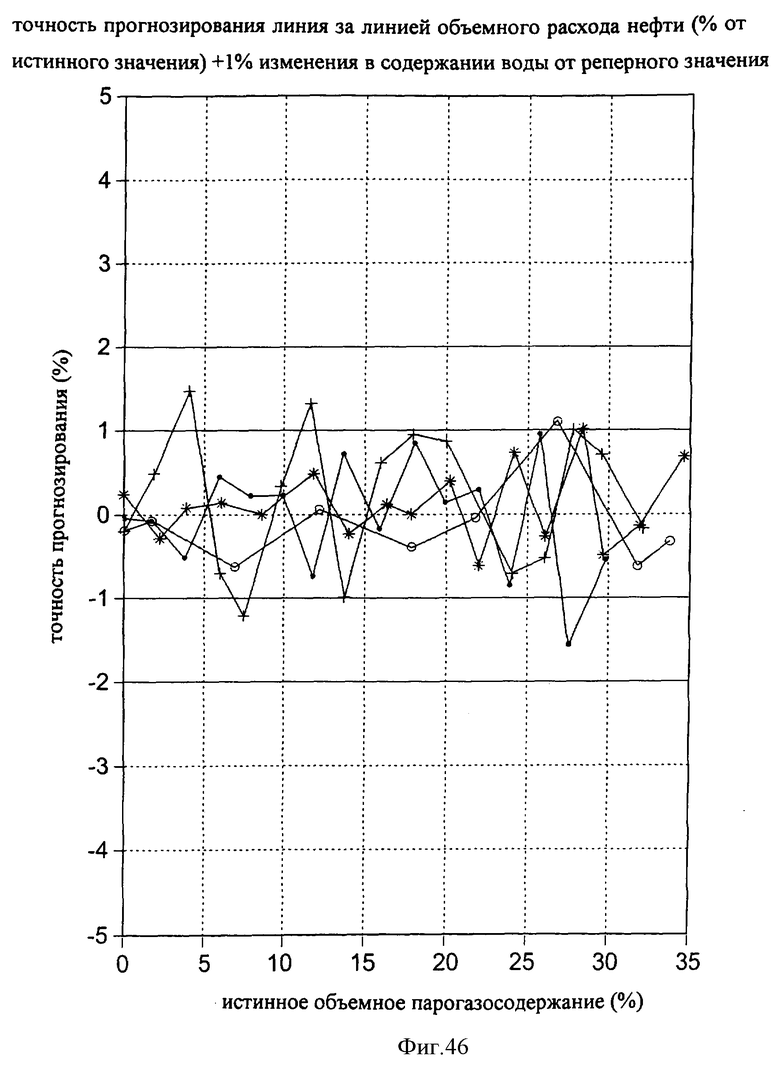
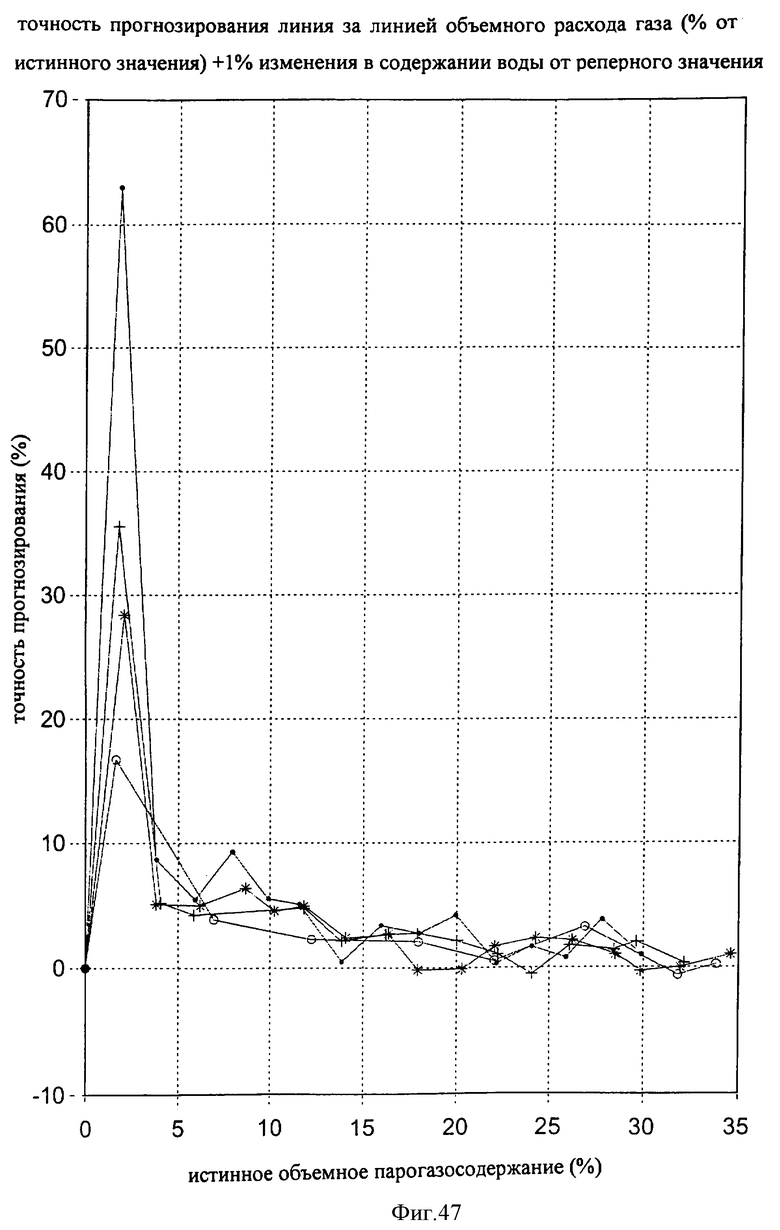
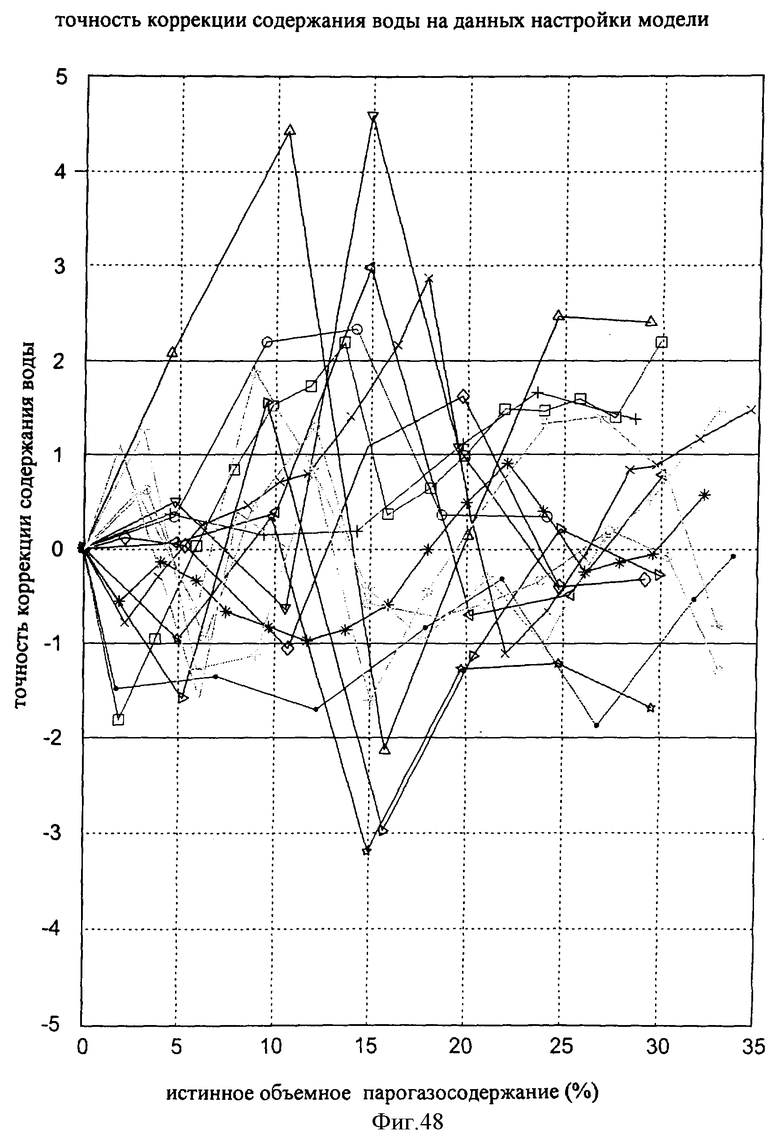
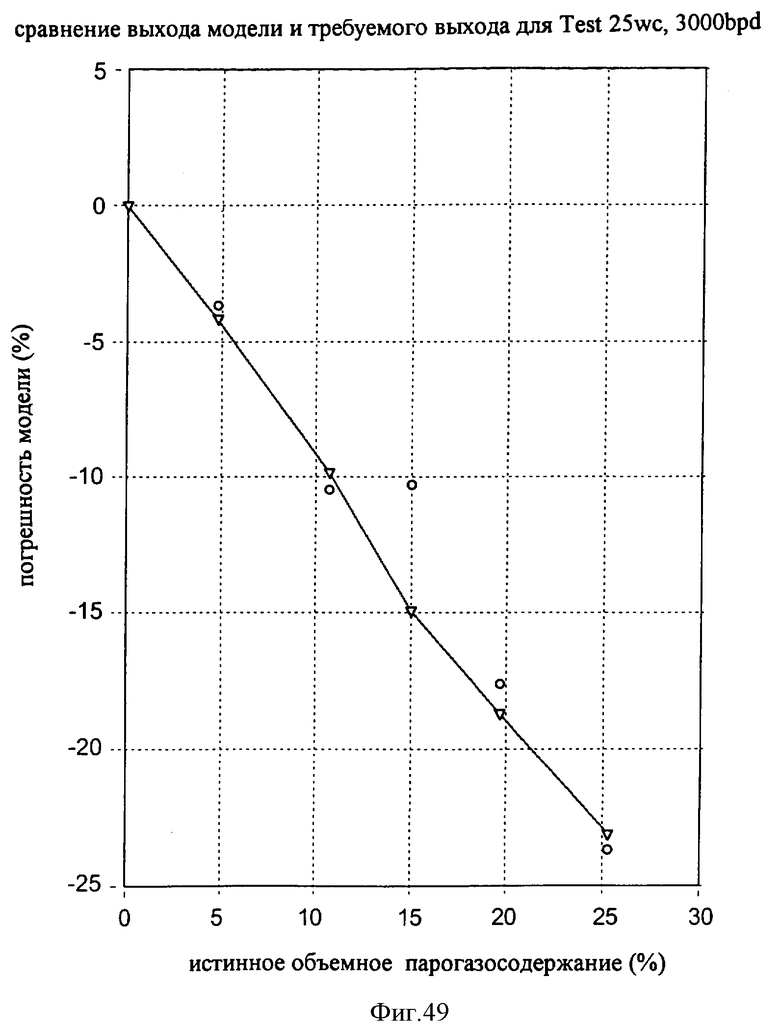


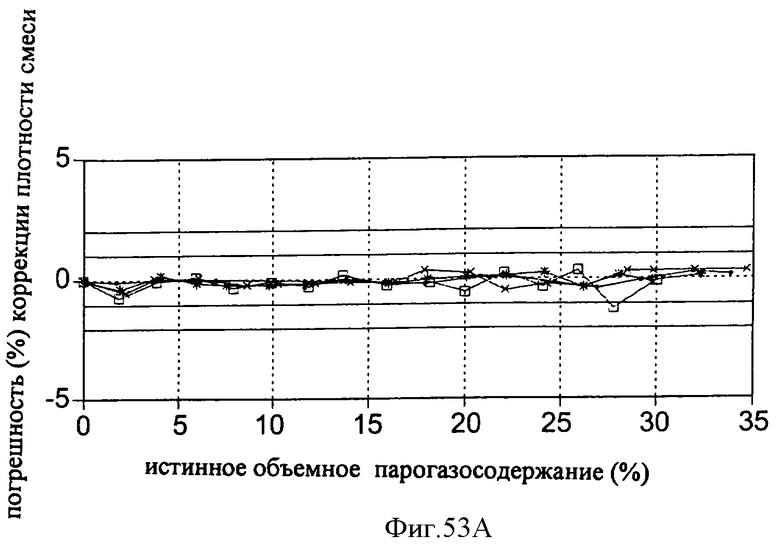
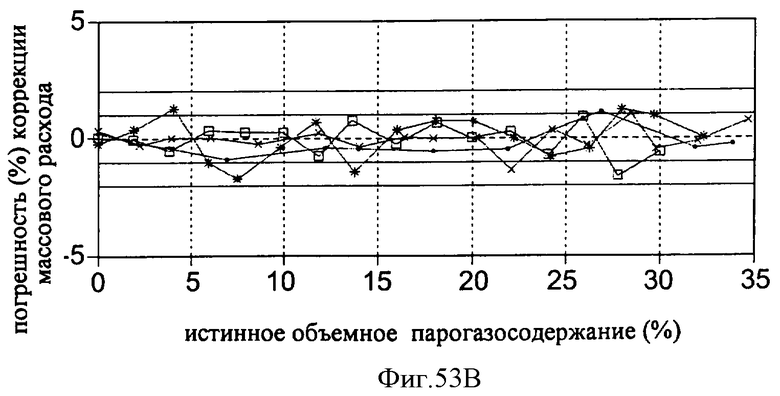

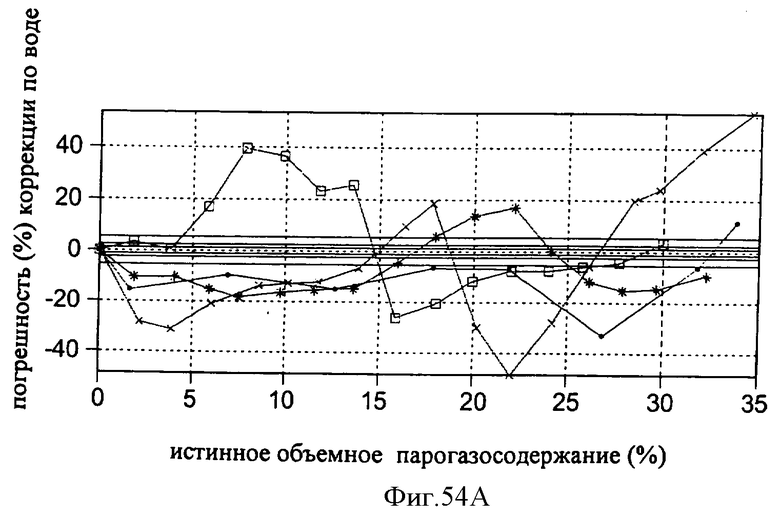
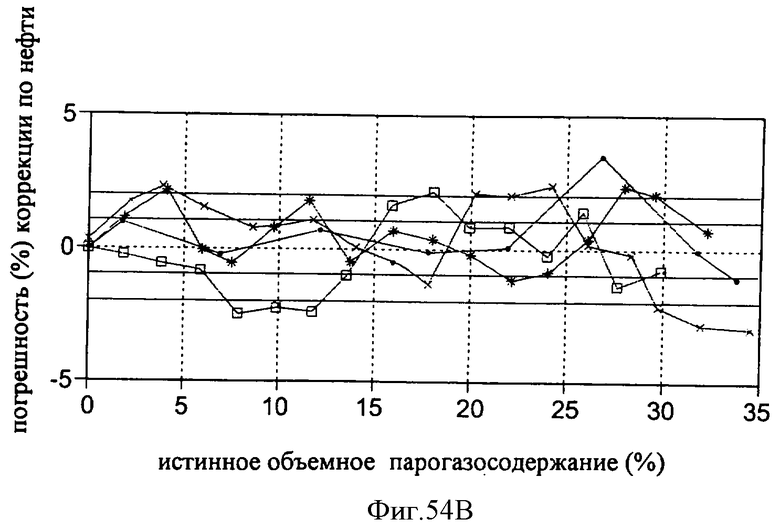


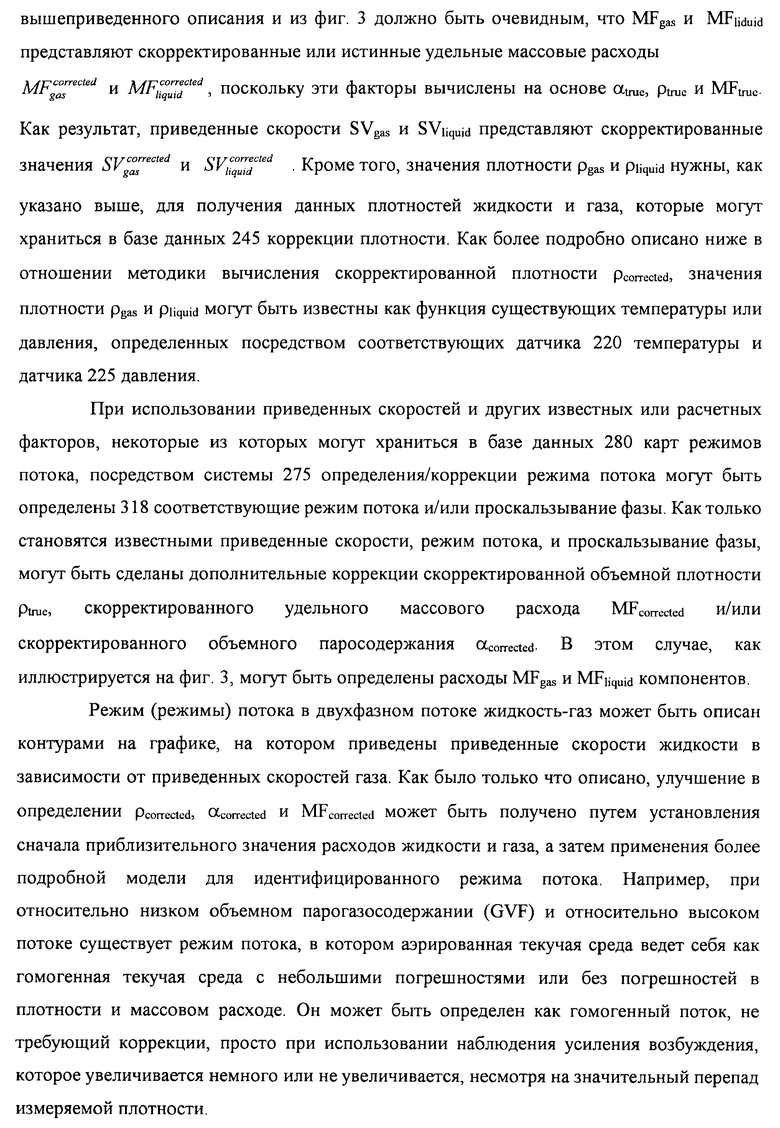
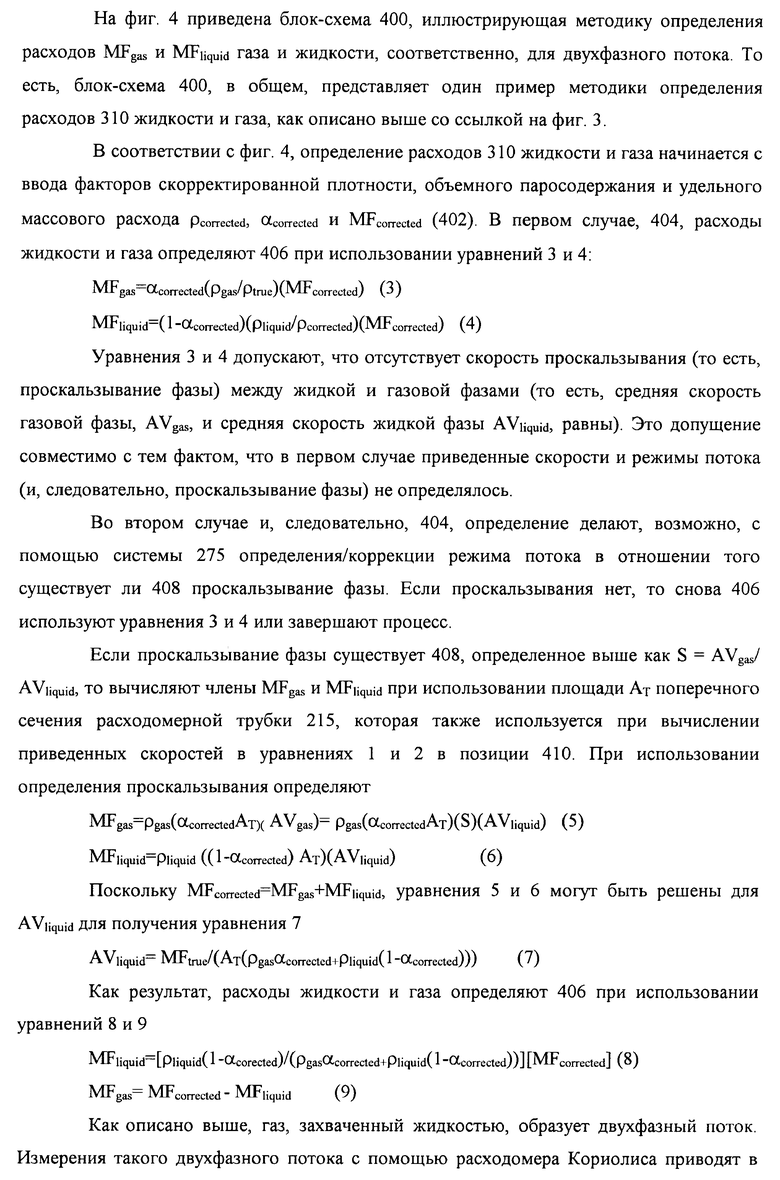
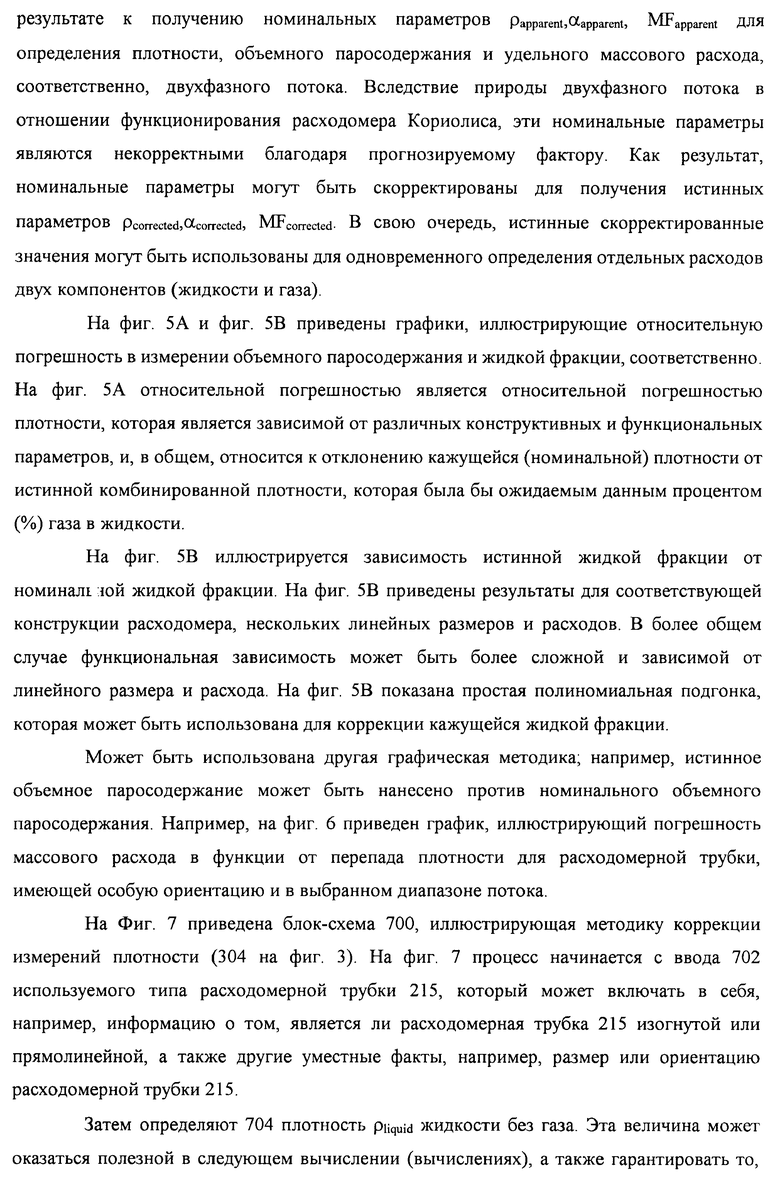
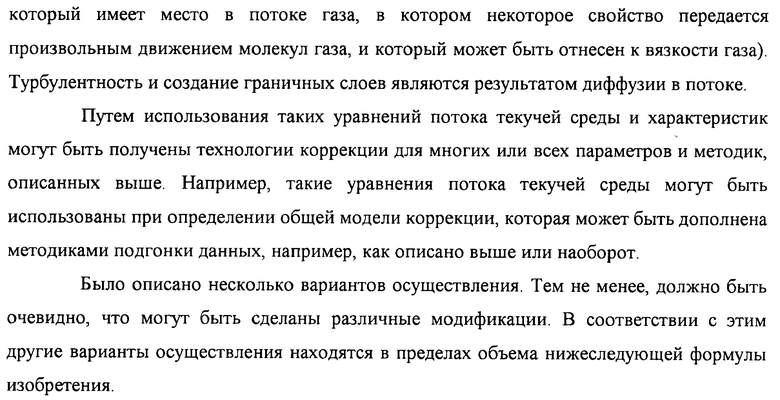
Изобретение может быть использовано для измерения массовых расходов компонентов смеси из нефти и воды, содержащей газ. Приводимая в колебание расходомерная трубка (215), через которую проходит многокомпонентный поток текучей среды, соединена трубопроводом с датчиком в виде зонда (230), служащим для определения кажущегося состояния потока, в частности жидкой фракции (содержания воды). Контроллер цифрового передатчика принимает сигналы датчика (230), датчика (235) объемного газосодержания, а также соединенного с расходомерной трубкой датчика (205), по сигналам которого определяется кажущийся параметр потока, в частности, кажущаяся объемная плотность. Модуль коррекций (2108) служит для определения скорректированного параметра и скорректированного состояния потока. Изобретение повышает точность измерения в широком диапазоне количественного содержания воды и свободного газа в потоке среды. 2 н. и 28 з.п. ф-лы, 107 ил.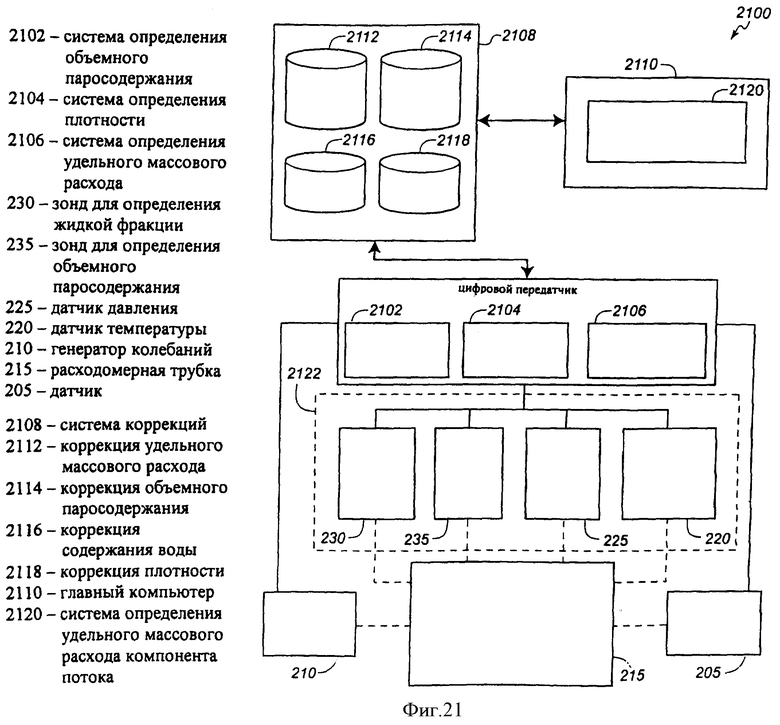
1. Система для определения параметров и состояний потока текучей среды, содержащая
контроллер для приема сигнала датчика от первого датчика, соединенного с колеблемой расходомерной трубкой, содержащей многокомпонентный поток текучей среды, который включает в себя первую жидкость, вторую жидкость и газ, причем контроллер дополнительно служит для анализа сигнала датчика для определения кажущегося параметра потока текучей среды,
второй датчик, служащий для определения кажущегося состояния потока текучей среды, в котором первая жидкость, вторая жидкость и газ смешаны между собой в процессе определения состояния потока этим вторым датчиком, трубопровод, соединяющий второй датчик и колеблемую расходомерную трубку так, что поток текучей среды проходит через указанные второй датчик, трубопровод и расходомерную трубку, а также
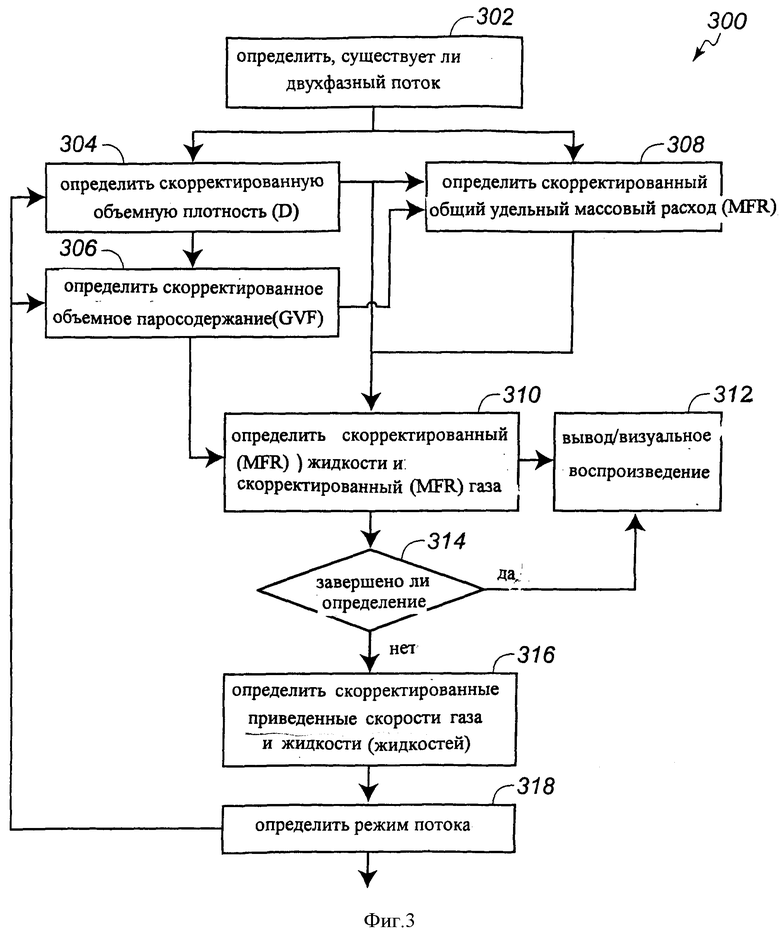
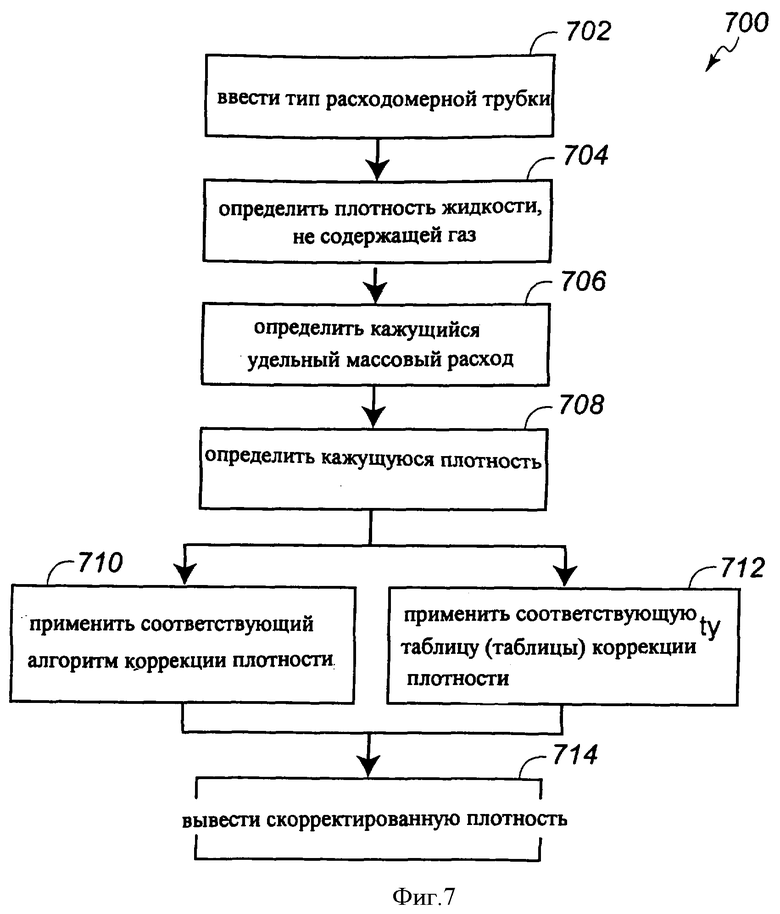
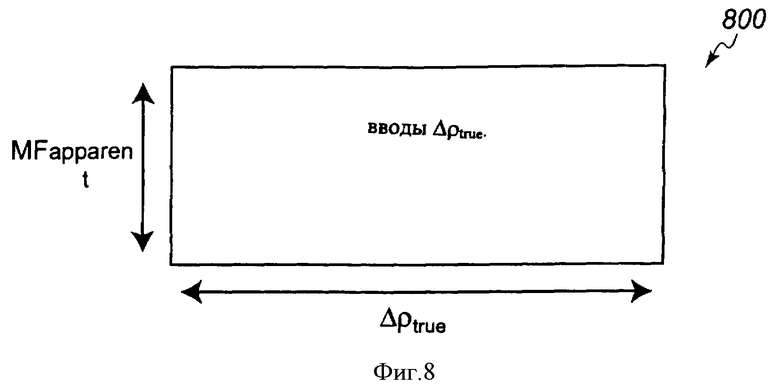
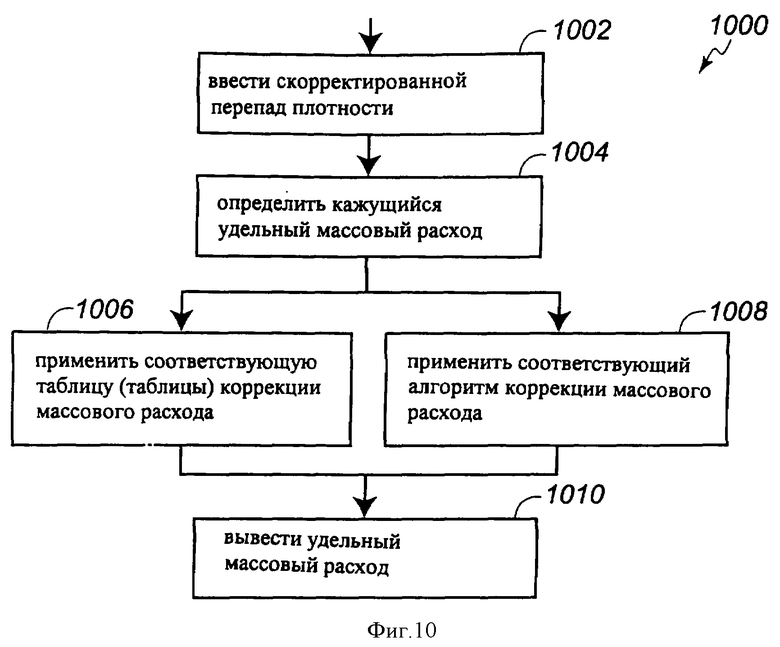
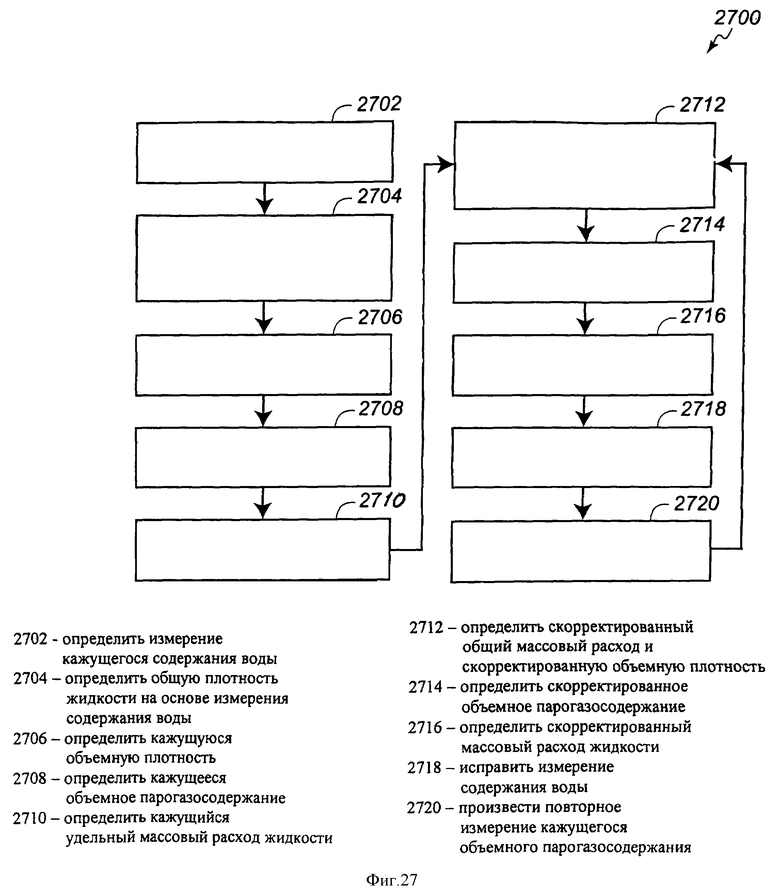
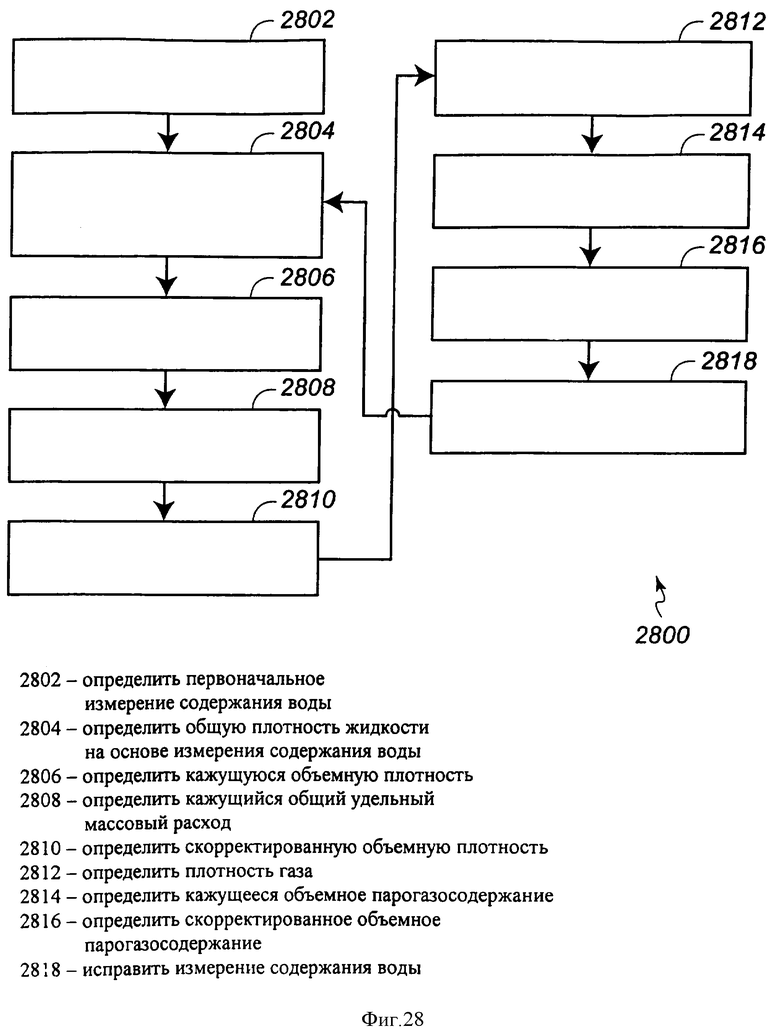
модуль коррекций, который служит для ввода кажущегося параметра потока и кажущегося состояния потока и определения из них скорректированного параметра потока
2. Система по п.1, в которой модуль коррекций дополнительно служит для ввода кажущегося параметра потока и кажущегося состояния потока и определения из них скорректированного состояния потока.
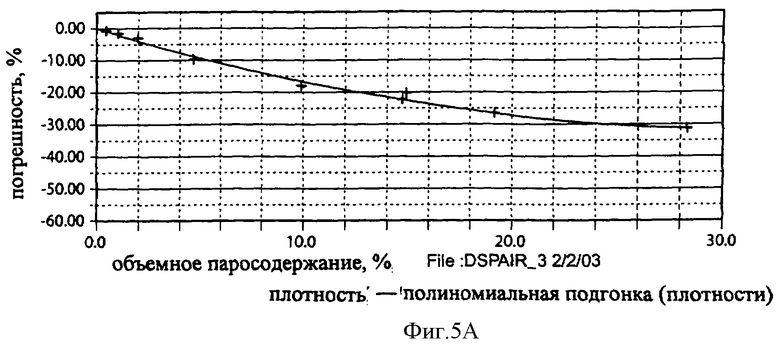
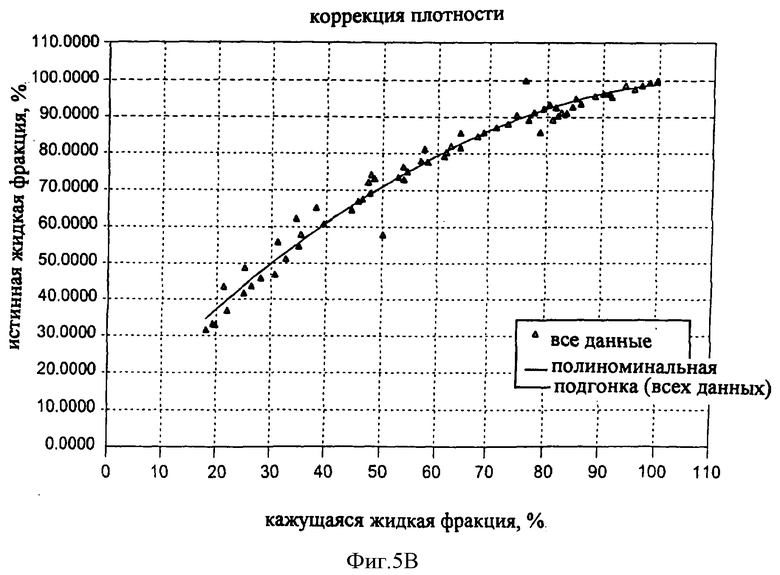
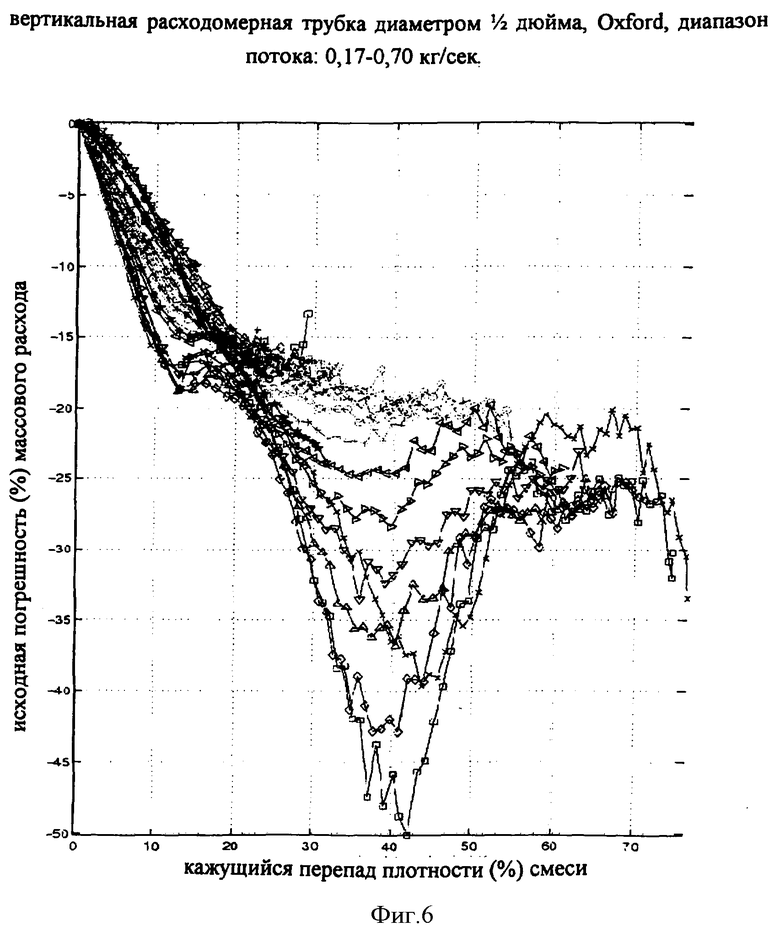
3. Система по п.1, в которой кажущийся параметр потока включает в себя кажущуюся объемную плотность потока текучей среды.
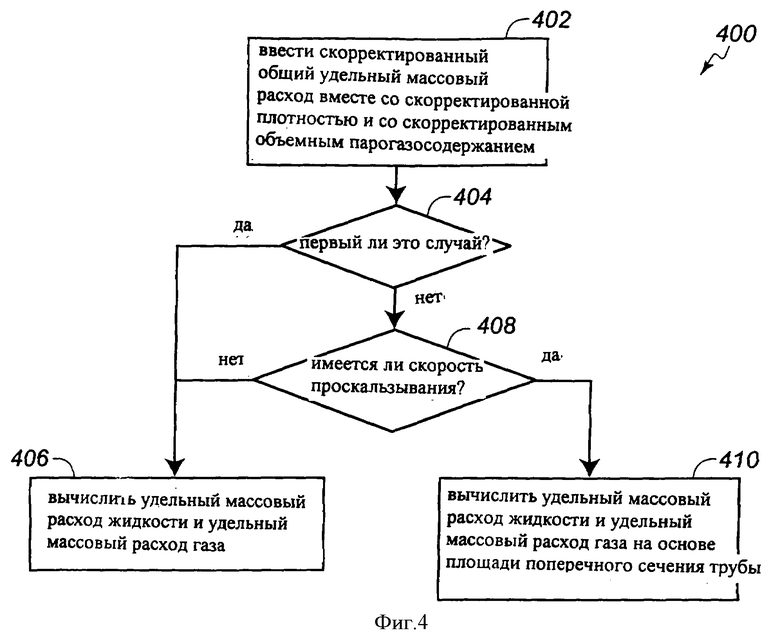
4. Система по п.1, в которой кажущийся параметр потока включает в себя кажущийся общий массовый расход потока текучей среды.
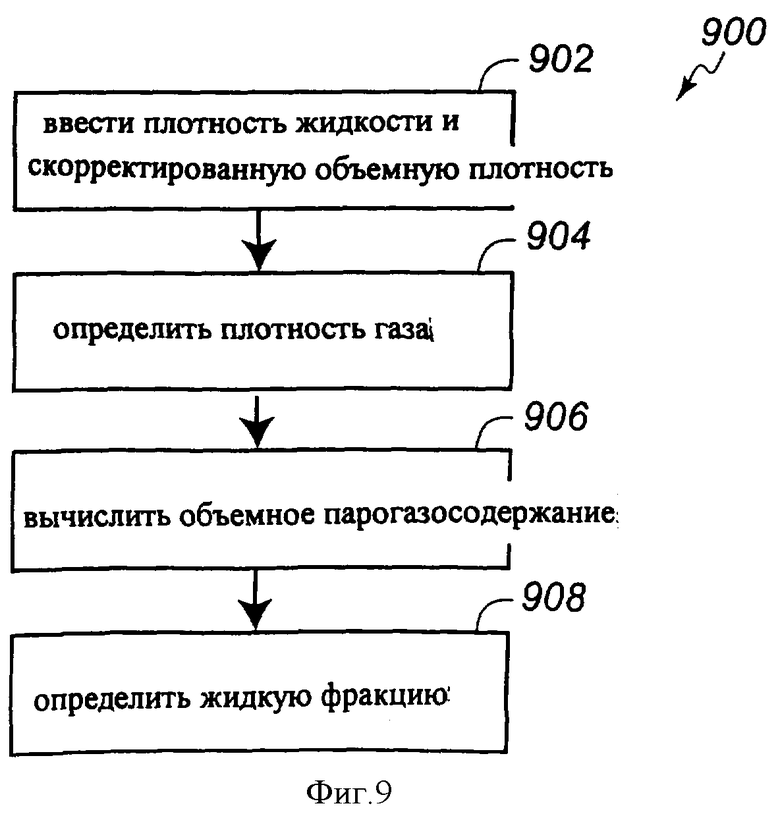
5. Система по п.1, в которой второй датчик включает в себя зонд, который служит для измерения жидкой фракции, идентифицирующий объемную фракцию первой жидкости относительно второй жидкости.
6. Система по п.1, в которой второй датчик включает в себя устройство для определения доли свободного объема, служащее для определения объемного газосодержания в потоке текучей среды.
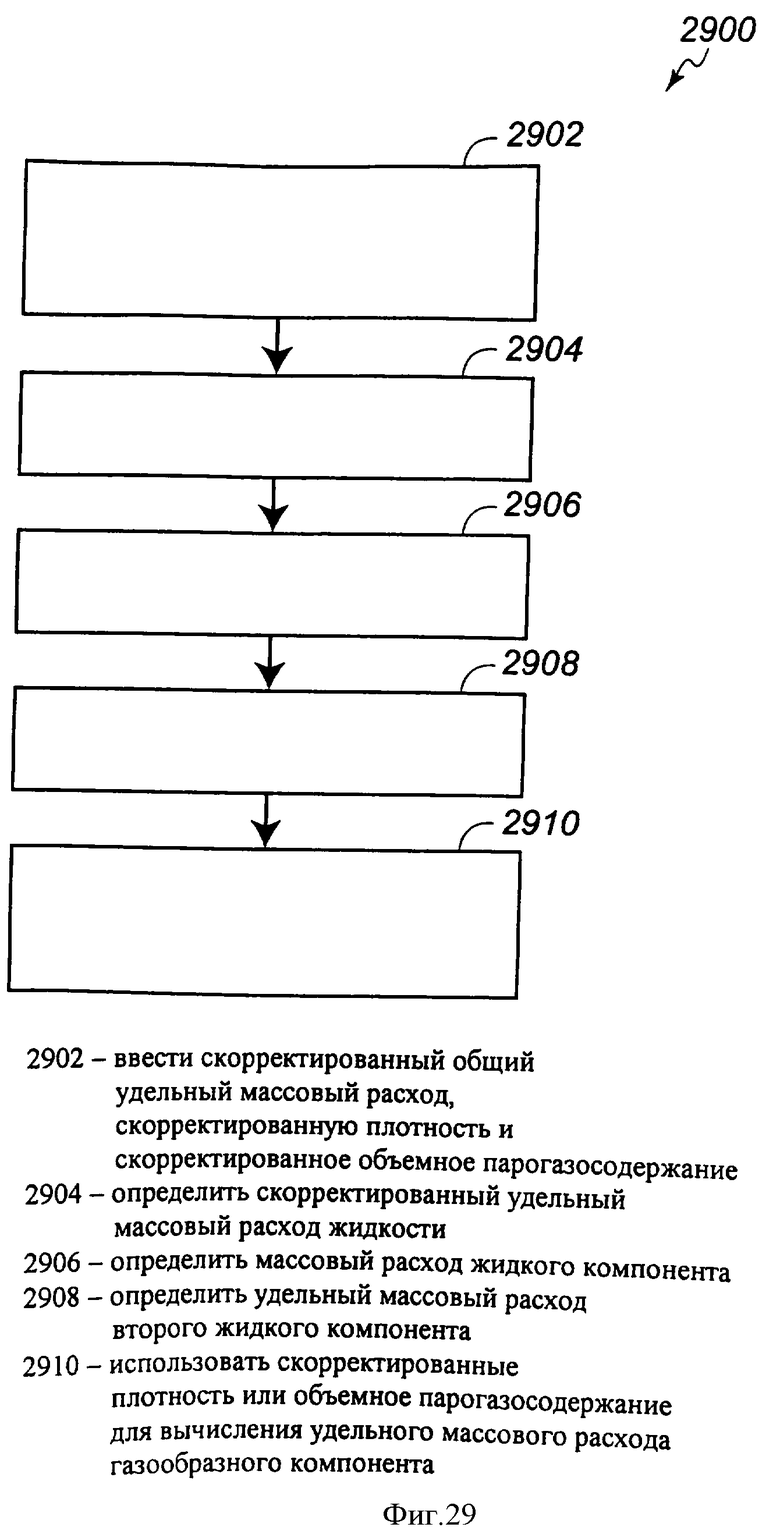
7. Система по п.1, дополнительно содержащая устройство для определения расхода компонента, которое служит для определения расхода первой жидкости в потоке текучей среды.
8. Система по п.7, в которой устройство для определения расхода компонента может быть реализовано в контроллере, модуле коррекций, втором датчике или главном компьютере во взаимодействиях с контроллером, модулем коррекций или вторым датчиком.
9. Система по п.1, дополнительно содержащая устройство для определения расхода компонента, которое служит для определения расхода газа в потоке текучей среды.
10. Система по п.1, в которой реализация модуля коррекций связана с процессором контроллера.
11. Система по п.1, в которой реализация модуля коррекций связана с процессором второго датчика.
12. Система по п.1, содержащая главный компьютер, который находится во взаимодействии с контроллером или вторым датчиком и служит для реализации модуля коррекций.
13. Система по п.1, в которой
второй датчик служит для обеспечения выхода первого значения кажущегося состояния потока к контроллеру для использования в определении первого скорректированного значения параметра потока;
контроллер служит для обеспечения выхода первого скорректированного значения параметра потока ко второму датчику для определения первого скорректированного значения состояния потока; а
второй датчик служит для обеспечения выхода второго скорректированного значения состояния потока к контроллеру для использования в определении скорректированного значения параметра потока.
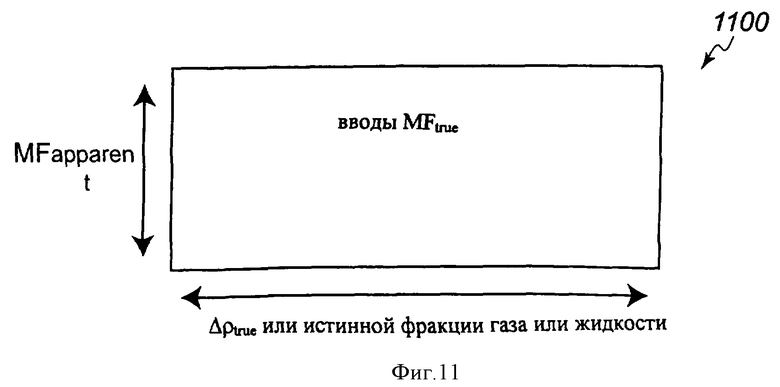
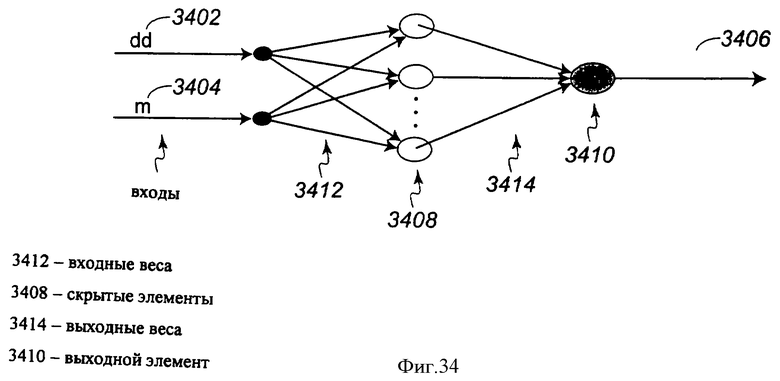
14. Система по п.2, в которой модуль коррекции включает в себя нейронную сеть, которая служит для ввода кажущегося параметра потока и кажущегося состояния потока и вывода скорректированного параметра потока и скорректированного состояния потока.
15. Система по п.14, в которой нейронная сеть содержит
первую модель коррекции, которая является особой для типа второго датчика и состояния потока и которая служит для вывода скорректированного состояния потока; и
вторую модель коррекции, которая является особой для типа кажущегося параметра потока и которая служит для вывода скорректированного параметра потока;
в которой первая модель коррекции служит для коррекции кажущегося состояния потока на основе кажущегося состояния потока и скорректированного параметра потока, а вторая модель коррекции служит для коррекции кажущегося параметра потока на основе кажущегося параметра потока и скорректированного состояния потока.
16. Система по п.1, в которой контроллер служит для коррекции кажущегося параметра потока на основе теоретической зависимости между кажущимся параметром потока и скорректированным параметром потока.
17. Система по п.1, в которой контроллер служит для коррекции кажущегося параметра потока на основе эмпирической зависимости между кажущимся параметром потока и скорректированным параметром потока.
18. Способ определения параметров и состояний потока текучей среды, включающий
пропускание многокомпонентного потока текучей среды через колеблемую расходомерную трубку, соединенную с первым датчиком, и трубопровод, соединяющий указанную расходомерную трубку со вторым датчиком, причем указанный поток включает в себя первую жидкость, вторую жидкость и газ,
определение кажущегося параметра потока текучей среды на основе сигнала первого датчика,
определение кажущегося состояния потока текучей среды с использованием второго датчика, причем в процессе определения этого состояния вторым датчиком первая жидкость, вторая жидкость и газ смешаны между собой в потоке текучей среды, а также определение скорректированного параметра потока на основе кажущихся параметра и состояния потока.
19. Способ по п.18, в котором дополнительно определяют скорректированное состояние потока на основе кажущихся параметра и состояния потока.
20. Способ по п.18, в котором кажущийся параметр потока включает в себя кажущуюся объемную плотность потока текучей среды.
21. Способ по п.18, в котором кажущийся параметр потока включает в себя кажущийся общий массовый расход потока текучей среды.
22. Способ по п.18, в котором второй датчик включает в себя зонд, который служит для измерения жидкой фракции, идентифицирующий объемную фракцию первой жидкости относительно второй жидкости.
23. Способ по п.18, в котором второй датчик включает в себя устройство для определения доли свободного объема, служащее для определения объемного газосодержания в потоке текучей среды.
24. Способ по п.18, в котором дополнительно определяют расход первой жидкости в потоке текучей среды.
25. Способ по п.18, в котором дополнительно определяют расход газа в потоке текучей среды.
26. Способ по п.18, в котором первое значение кажущегося состояния потока со второго датчика используют для определения первого скорректированного значения параметра потока;
первое скорректированное значение параметра потока используют для определения первого скорректированного значения состояния потока;
второе скорректированное значение состояния потока используют для определения скорректированного значения параметра потока.
27. Способ по п.19, в котором используют нейронную сеть, которая служит для ввода кажущегося параметра потока и кажущегося состояния потока и вывода скорректированного параметра потока и скорректированного состояния потока.
28. Способ по п.27, в котором нейронная сеть содержит
первую модель коррекции, которая является особой для типа второго датчика и состояния потока и которая служит для вывода скорректированного состояния потока;
вторую модель коррекции, которая является особой для типа кажущегося параметра потока и которая служит для вывода скорректированного параметра потока;
в которой первая модель коррекции служит для коррекции кажущегося состояния потока на основе кажущегося состояния потока и скорректированного параметра потока, а вторая модель коррекции служит для коррекции кажущегося параметра потока на основе кажущегося параметра потока и скорректированного состояния потока.
29. Способ по п.18, в котором кажущийся параметр потока корректируют на основе теоретической зависимости между кажущимся параметром потока и скорректированным параметром потока.
30. Способ по п.18, в котором кажущийся параметр потока корректируют на основе эмпирической зависимости между кажущимся параметром потока и скорректированным параметром потока.
| US 6505519 В2, 14.01.2003 | |||
| US 5224372 А, 06.07.1993 | |||
| US 6546811 В2, 15.04.2003 | |||
| РАСХОДОМЕР ГАЗОНАСЫЩЕННОЙ НЕФТИ | 1996 |
|
RU2102708C1 |

