Эта заявка является частичным продолжением заявки № 10/614,097 на выдачу патента США, зарегистрированной 3 июля 2003 г., которая, таким образом, во всей своей полноте включена в материалы настоящей заявки посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к системам определения местоположения, а боле точно, к системе и способу для определения местоположения мобильного устройства относительно некоторого количества объектов с использованием одного или более преднамеренных сигналов многолучевого распространения.
УРОВЕНЬ ТЕХНИКИ
Локальные системы определения местоположения становятся важным вспомогательным средством в мобильных устройствах, нуждающихся в возможностях навигации, особенно в применениях автономных транспортных средств и точных строительных инструментов. Глобальные системы определения местоположения, такие как GPS (глобальная система определения местоположения), предоставляют информацию местоположения только средней точности, обычно не лучшей, чем 10 см, и требуют хорошей видимости практически до уровня горизонта. Локальные системы определения местоположения, с активными либо пассивными компонентами, распределенными в рабочем объеме, могут предоставить возможность определения местоположения гораздо большей точности (<1 см) и предоставляют пользователю возможность расширять систему, по необходимости, для работы даже в более сложных замкнутых конфигурациях.
Традиционные локальные системы определения местоположения включают в себя системы акустической и лазерной дальнометрии. Акустические системы типично используют радиомаяки-ответчики для измерения дальности в пределах сети устройств, некоторые из которых зафиксированы для формирования локальной системы координат. К сожалению, вследствие свойств распространения звука по воздуху акустические системы могут измерять дальность только до точностей в сантиметры или более и только на относительно коротких дистанциях. Локальные системы определения местоположения, основанные на лазерах, используют измерение как угла, так и дальности между устройством и одним или более отражающими объектами, такими как призмы, чтобы производить триангуляцию или трилатерацию местоположения устройства. Однако в настоящий момент лазерные системы применяют дорогостоящие механизмы наведения, которые могут доводить себестоимость системы до $30000 или более.
Относительно недорогая (например, ниже $2000) локальная система определения местоположения, способная определять 2D (двухмерные) или 3D (трехмерные) местоположения с точностями до нескольких миллиметров, могла бы дать возможность большого набора потенциальных продуктов в таких прикладных областях, как прецизионные находящиеся в помещении и находящиеся на открытом воздухе конструкции, горные работы, точное выкашивание и протравливание сельскохозяйственных и стадионных полей. Настоящее изобретение преодолевает стоимостные и точностные ограничения традиционных локальных систем определения местоположения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Предоставлены система и способ, предусматривающие недорогую, однако высокоточную, локальную систему определения местоположения. В одном из вариантов осуществления устройство, включающее в себя антенну и рефлектор с известным местоположением, приближенным к антенне, передает по меньшей мере электромагнитный импульс, обладающий частотой несущего сигнала. Устройство принимает отраженный сигнал в течение периода времени, при этом отраженный сигнал включает в себя отраженный импульс от объекта в пределах зоны радиолокационного обнаружения устройства и по меньшей мере один импульс многолучевого распространения. Устройство обрабатывает отраженный сигнал, с тем чтобы выделять отраженный импульс и по меньшей мере один импульс многолучевого распространения из отраженного сигнала. Устройство определяет дальность от устройства до объекта и местоположение устройства относительно объекта. Дальность определяется в соответствии со временем прихода отраженного импульса, а местоположение определяется в соответствии со временем прихода по меньшей мере одного импульса многолучевого распространения.
В некоторых вариантах осуществления передаваемый импульс является поляризованным, а отраженный принимаемый сигнал обладает предпочтительно такой же поляризацией.
В некоторых вариантах осуществления рефлектор является пассивным рефлектором. В других вариантах осуществления рефлектор является активным рефлектором. В некоторых вариантах осуществления объект является пассивным рефлектором. В других вариантах осуществления объект является активным ориентиром.
В некоторых вариантах осуществления устройство включает в себя процессор, память и по меньшей мере один программный модуль. По меньшей мере один программный модуль хранится в памяти и выполняется процессором. По меньшей мере один программный модуль содержит в себе инструкции для обработки отраженного сигнала, с тем чтобы выделять отраженный импульс и по меньшей мере один импульс многолучевого распространения из отраженного сигнала. По меньшей мере один программный модуль также содержит инструкции для определения дальности от устройства до объекта и местоположения устройства относительно объекта. Дальность определяется в соответствии со временем прихода отраженного импульса, а местоположение определяется в соответствии со временем прихода по меньшей мере одного импульса многолучевого распространения.
В некоторых вариантах осуществления антенна сконфигурирована как для предпочтительной передачи импульса, имеющего поляризацию, так и для предпочтительного приема отраженного сигнала, имеющего поляризацию.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные цели и признаки изобретения будут быстрее очевидны из последующего подробного описания и прилагаемой формулы изобретения, когда воспринимаются в соединении с чертежами.
Фиг.1 - структурная схема, иллюстрирующая вариант осуществления системы определения местоположения с одним или более преднамеренными сигналами многолучевого распространения.
Фиг.2 - структурная схема, иллюстрирующая вариант осуществления системы определения местоположения.
Фиг.3A - схема, иллюстрирующая время прихода сигналов прямого распространения и многолучевого распространения в варианте осуществления системы определения местоположения.
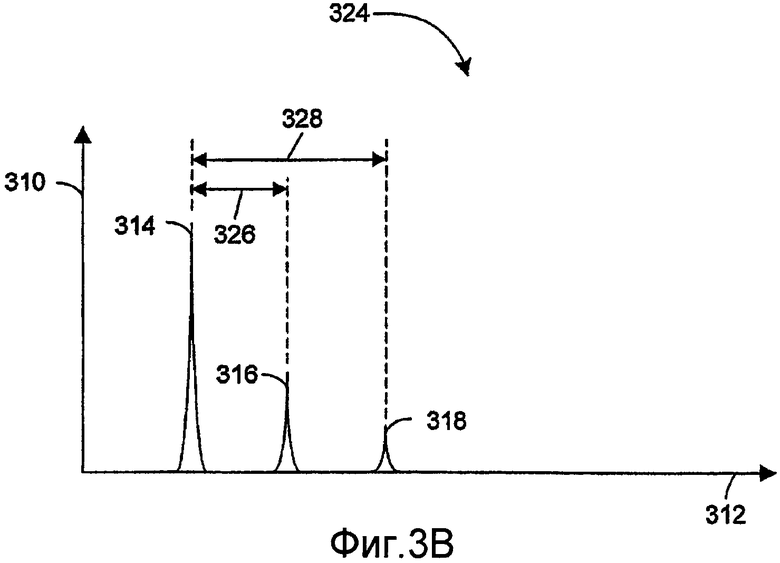
Фиг.3B - схема, иллюстрирующая время прихода сигналов прямого распространения и многолучевого распространения в варианте осуществления системы определения местоположения.
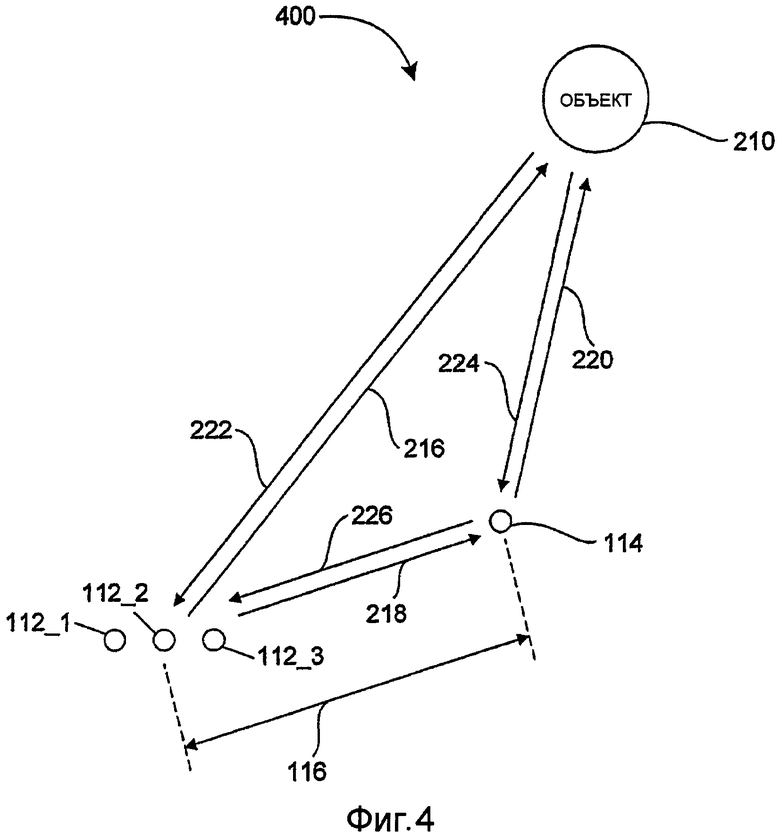
Фиг.4 - структурная схема, иллюстрирующая вариант осуществления системы определения местоположения.
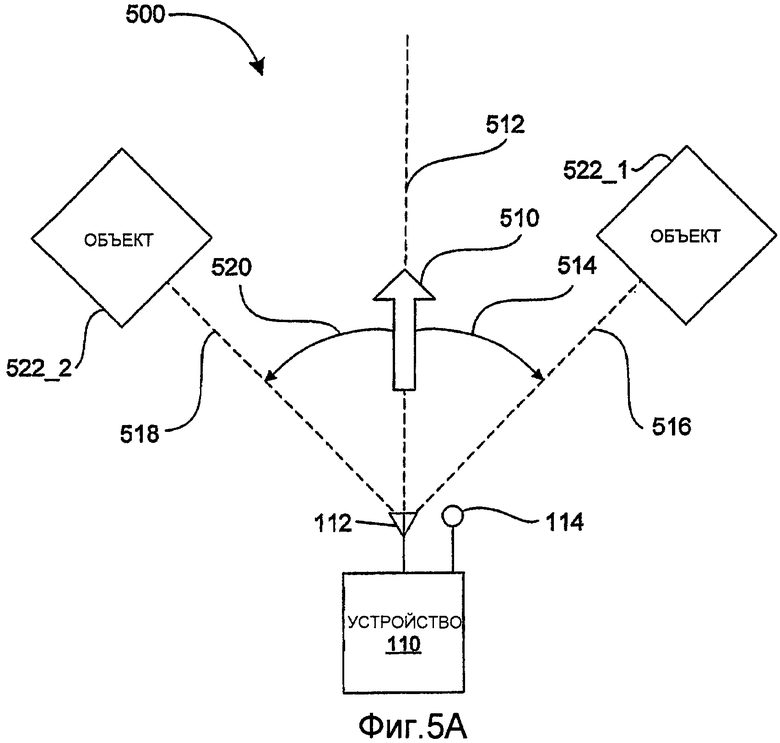
Фиг.5A - структурная схема, иллюстрирующая вариант осуществления системы определения местоположения.
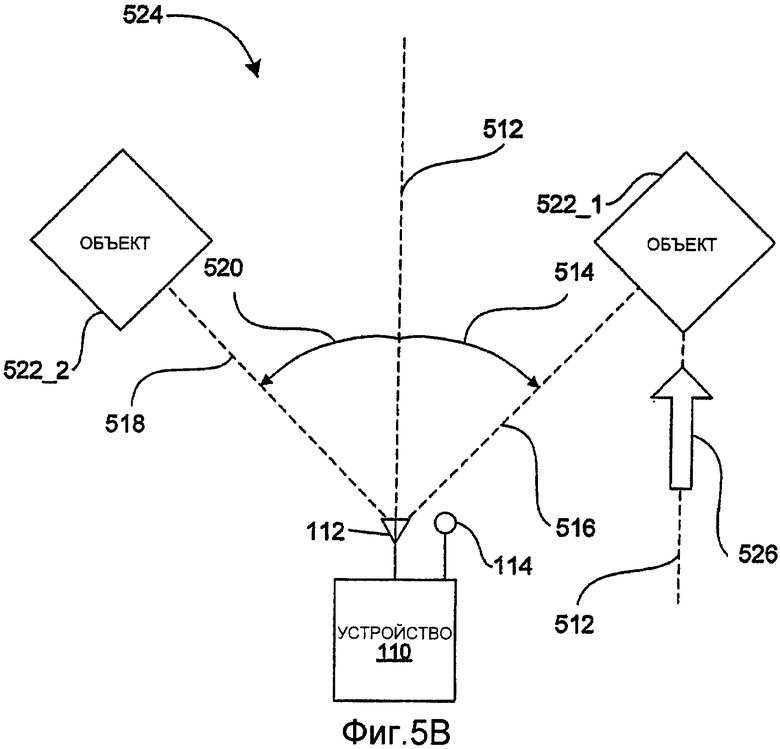
Фиг.5B - структурная схема, иллюстрирующая вариант осуществления системы определения местоположения.
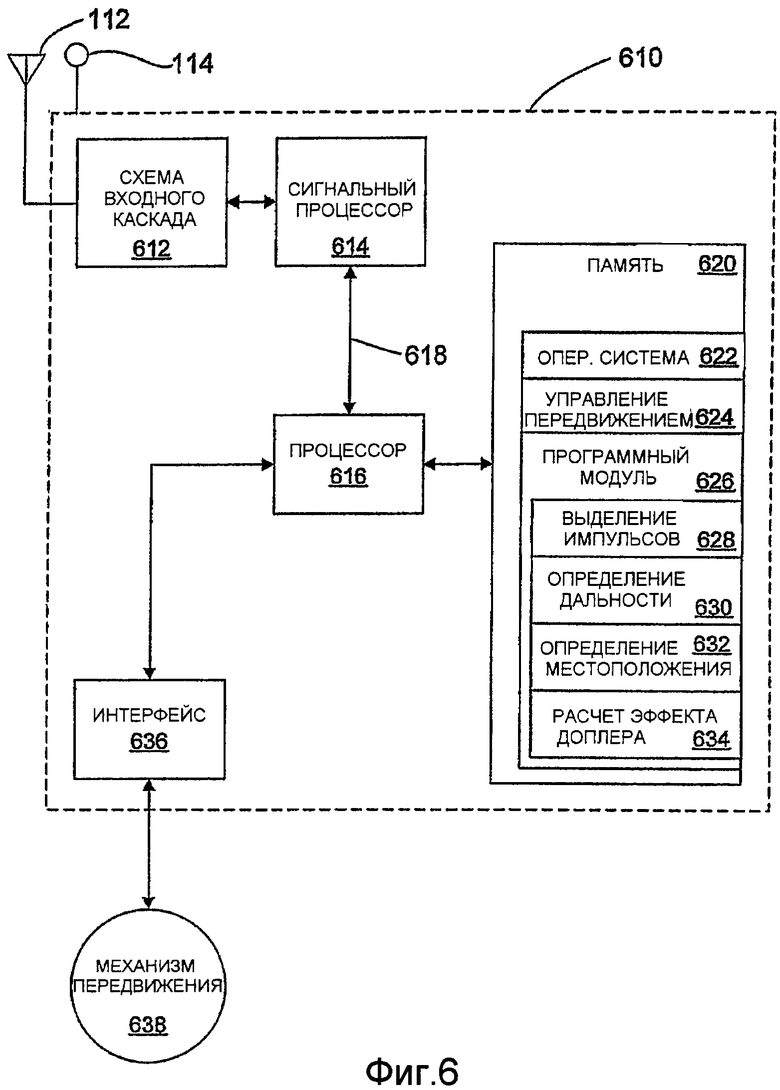
Фиг.6 - структурная схема, иллюстрирующая компоненты в типичном устройстве по варианту осуществления системы определения местоположения.
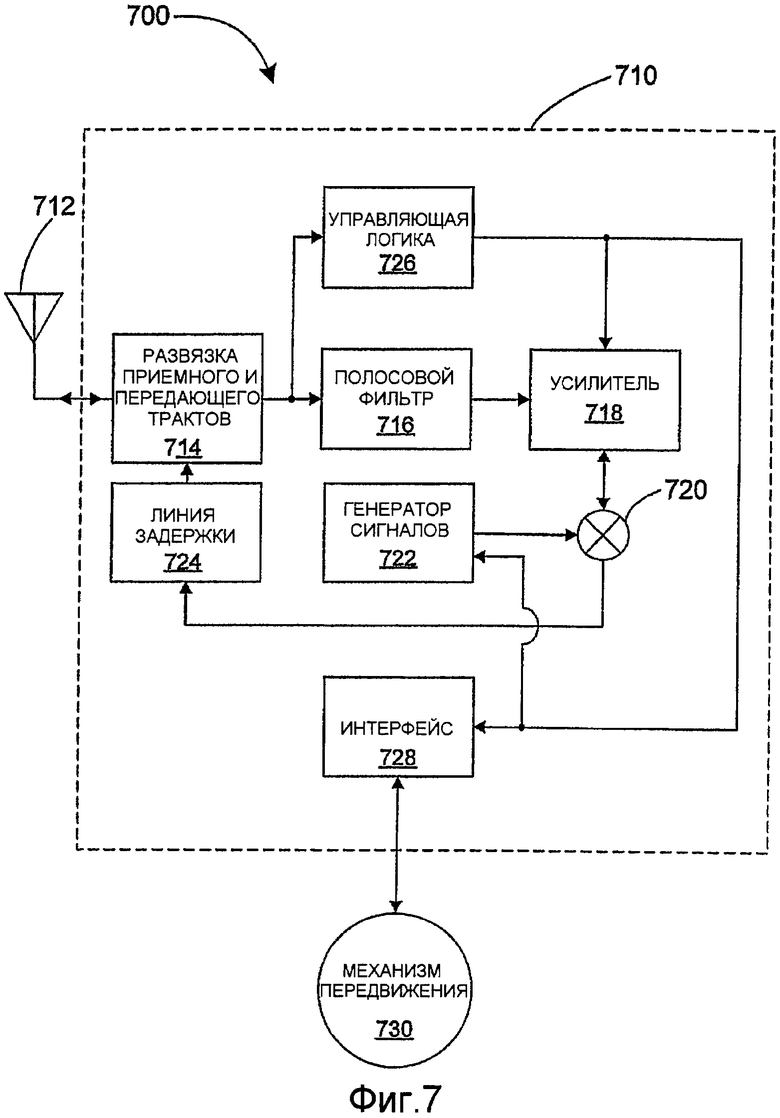
Фиг.7 - структурная схема, иллюстрирующая компоненты в типичном активном ориентире по варианту осуществления системы определения местоположения.
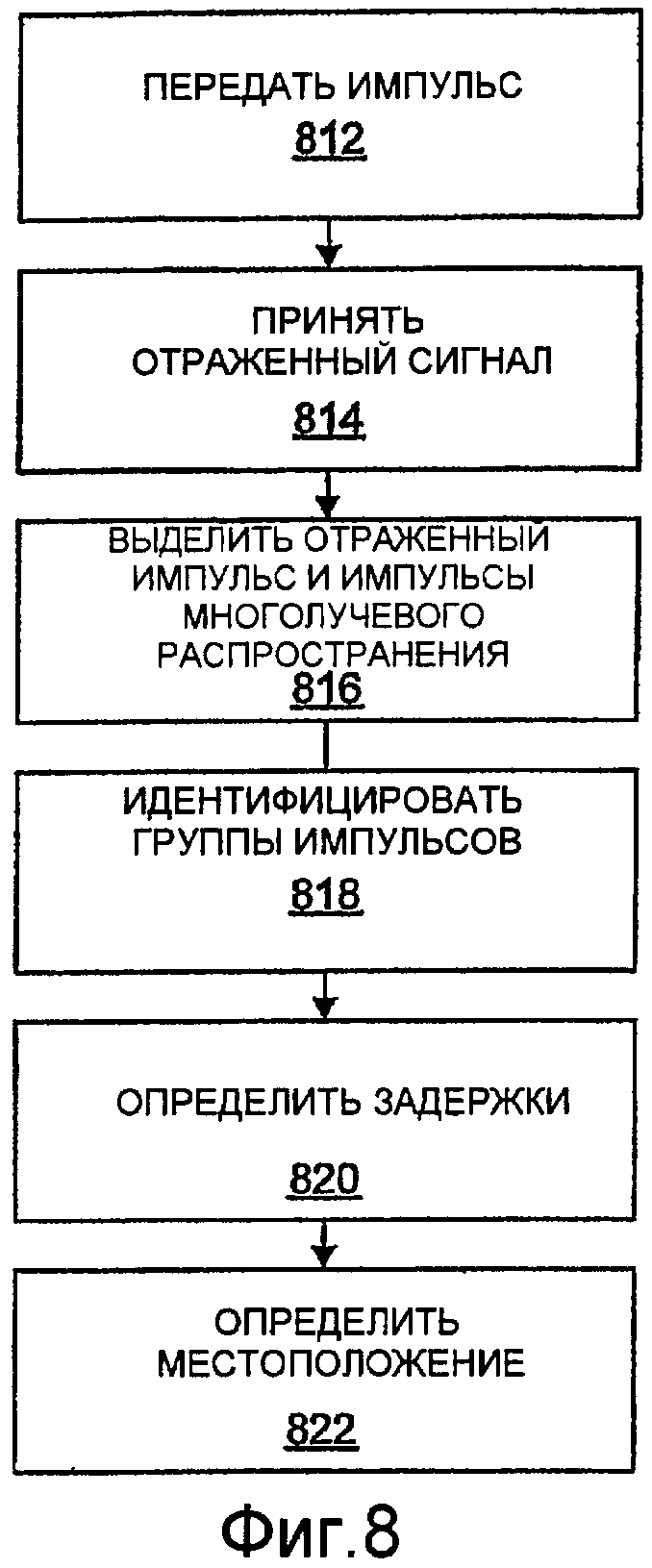
Фиг.8 - блок-схема последовательности операций способа, иллюстрирующая операции в варианте осуществления процедуры, использующей один или более преднамеренных сигналов многолучевого распространения.
Одинаковые номера ссылок указывают на соответствующие части на всем протяжении нескольких изображений по чертежам.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее следует подробное описание вариантов осуществления изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. В последующем подробном описании многочисленные специфические детали изложены для того, чтобы обеспечить исчерпывающее понимание настоящего изобретения. Однако специалисту в данной области техники будет очевидно, что настоящее изобретение может быть осуществлено на практике без этих специфичных деталей. В других случаях широко известные способы, процедуры, компоненты и схемы не были описаны подробно, с тем чтобы излишне не затенять аспекты настоящего изобретения.
Вообще многолучевое распространение ухудшает эксплуатационные показатели систем связи, таких как сотовые телефонные сети и беспроводные локальные сети (WLAN), а также систем определения местоположения, таких как глобальная система определения местоположения (GPS). Многолучевое распространение возникает, например, когда радиочастотный сигнал подвергается разным траекториям при распространении от передатчика к приемнику. В то время как сигнал находится в пути, объекты, такие как стены, стулья, столы и другие предметы, заставляют сигнал отражаться в одном или более разных направлениях. Например, часть сигнала, известная как сигнал прямого распространения, может распространяться прямо на приемник, а другая часть может отражаться от стула в потолок, а затем - на приемник. Как результат, некоторое количество сигнала будет встречаться с задержкой и проходить одну или более траекторий большей длины до приемника. Эта часть сигнала известна как сигнал многолучевого распространения.
На приемнике один или более сигналов многолучевого распространения могут перекрываться с сигналом прямого распространения, вызывая межсимвольные помехи. В системах связи эти помехи могут быть следствием ошибки при демодуляции информации, закодированной в сигналах, приводя к битовым ошибкам. В системах определения местоположения эти помехи могут иметь следствием ошибку в определенном местоположении устройства, такую как псевдодальность в GPS. Как следствие, в существующих системах сигналы многолучевого распространения уничтожаются или минимизируются с использованием технологий, таких как разнесение (включение в состав двух или более приемных антенн в местах, физически разделенных друг от друга) и подавление многолучевого распространения (смотрите, например, US 6,370,207). Эти подходы добавляют сложность и издержки этим существующим системам.
Варианты осуществления системы и способа, которые предоставляют недорогую, однако высокоточную, локальную систему определения местоположения, предусмотрены вариантами осуществления настоящего изобретения, описанного в этом документе. Эти варианты осуществления используют сигналы многолучевого распространения, которые обычно считаются нежелательными, полезным образом. В частности, один или более сигналов многолучевого распространения преднамеренно создаются в локальной системе определения местоположения. Рефлектор с известным местоположением, приближенным к антенне в устройстве, создает один или более сигналов многолучевого распространения. Посредством сравнения задержек во времени прихода одного или более сигналов многолучевого распространения (относительно сигнала прямого распространения) с максимальной задержкой, соответствующей известному местоположению рефлектора, может определяться местоположение устройства относительно объекта в пределах зоны радиолокационного обнаружения устройства.
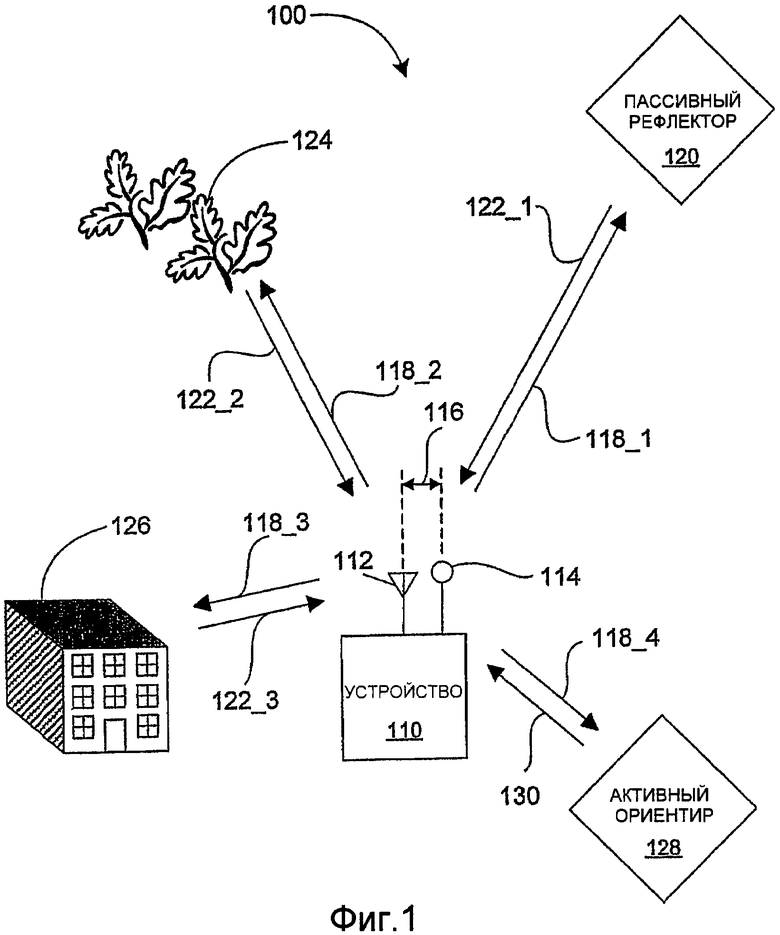
Фиг.1 иллюстрирует вариант 100 осуществления системы определения местоположения с одним или более преднамеренными сигналами многолучевого распространения. Устройство 110 сконфигурировано для передачи одного или более сигналов 118, каждый из которых включает в себя по меньшей мере один электромагнитный импульс, имеющий частоту несущего сигнала, с использованием по меньшей мере одной антенны 112. В некоторых вариантах осуществления устройство 110 сконфигурировано для передачи одного или более сигналов 118, содержащих множество электромагнитных импульсов. В примерном варианте осуществления импульсы составляют 1 наносекунду (нс) по длительности и имеют частоту несущего сигнала в 6 гигагерц (ГГц). Типичным периодом повторения импульсов является каждая микросекунда. Другие варианты осуществления могут применять пары длительности и частоты несущего сигнала импульса: 1 нс и 24 ГГц; 5 нс и 6 ГГц; и 1 нс и 77 ГГц. Повышенная точность оценки дальности, достижимая более короткими длительностями импульса и высокими частотами несущего сигнала, обнаруживает издержки повышенной себестоимости и сложности ассоциативно связанных схемных решений в некоторых вариантах осуществления.
В некоторых вариантах осуществления передаваемые сигналы 118 являются поляризованными. Поляризация может включать в себя линейную поляризацию, эллиптическую поляризацию, правую эллиптическую поляризацию, левую эллиптическую поляризацию, правую круговую поляризацию или левую круговую поляризацию.
Устройство 110 также включает в себя рефлектор 114, приближенный к антенне 112. Рефлектор 114 имеет расстояние 116 от антенны 112. В примерном варианте осуществления расстояние 116 соответствует задержке распространения от антенны 112 до рефлектора 114 в 2 нс или около 0,6 м. Часть одного или более из переданных сигналов 118 отражается от рефлектора 114, имея следствием один или более сигналов многолучевого распространения во время передачи. В некоторых вариантах осуществления рефлектор 114 является пассивным рефлектором. В других вариантах осуществления рефлектор 114 является активным рефлектором, в котором часть передаваемых сигналов 118 принимается и ретранслируется рефлектором 114. Каждый ретранслированный сигнал включает в себя по меньшей мере один электромагнитный импульс. В некоторых вариантах осуществления электромагнитные импульсы в ретранслированных сигналах могут иметь вторую частоту несущего сигнала. В некоторых вариантах осуществления ретранслированные сигналы могут модулироваться с использованием амплитудной модуляции или частотной модуляции и/или могут кодироваться. В некоторых вариантах осуществления ретранслированные сигналы могут быть поляризованными. В некоторых вариантах осуществления поляризация ретранслированных сигналов может быть такой же, как у передаваемых сигналов 118. Активный рефлектор может вызывать дополнительную временную задержку, ассоциативно связанную с промежутком времени между тем, когда часть передаваемых сигналов 118 принимается и когда она ретранслируется. Эта задержка может определяться при процедуре калибровки и сохраняться в устройстве 110. Последующие определения местоположения устройства 110 могут подвергаться поправке на эту задержку. За исключением отмеченного иначе в примерных вариантах осуществления в оставшейся части обсуждения рефлектор 114 трактуется пассивным рефлектором.
Сигналы 118, в том числе сигналы многолучевого распространения, отражаются от одного или более объектов, в том числе пассивного рефлектора 120, листвы 124 и/или здания 126, в пределах зоны радиолокационного обнаружения системы 100 определения местоположения. Например, листва 124, когда облучается сигналом 118_2, будет отражать сигнал 122_2. Подобным образом, здание 126, когда облучается сигналом 118_3, будет отражать сигнал 122_3. Каждый из отраженных сигналов 122 включает в себя по меньшей мере один электромагнитный отраженный импульс. В некоторых вариантах осуществления отраженные сигналы 122 включают в себя множество электромагнитных отраженных импульсов. В некоторых вариантах осуществления пассивный рефлектор 120 является двугранным рефлектором. В некоторых вариантах осуществления пассивный рефлектор 120 является уголковым рефлектором.
В некоторых вариантах осуществления система 100 определения местоположения содержит в себе один или боле необязательных активных ориентиров 128, на которых передаваемые сигналы 118_4 принимаются и ретранслируются, в виде сигнала 130, активным ориентиром 128. Сигнал 130 включает в себя по меньшей мере один электромагнитный отраженный импульс. В некоторых вариантах осуществления сигнал 130 включает в себя множество электромагнитных отраженных импульсов. В некоторых вариантах осуществления электромагнитный отраженный импульс в сигнале 130 может иметь вторую частоту несущего сигнала. В некоторых вариантах осуществления сигнал 130 может модулироваться с использованием амплитудной модуляции или частотной модуляции и/или может кодироваться. В некоторых вариантах осуществления сигнал 130 может быть поляризованным. В некоторых вариантах осуществления поляризация сигнала 130 может быть такой же, как передаваемый сигнал 118_4. Активный ориентир 128 может вызывать дополнительную временную задержку, ассоциативно связанную с промежутком временем между тем, когда передаваемый сигнал 118_4 принимается и когда сигнал 130 ретранслируется. Эта задержка может определяться при процедуре калибровки и сохраняться в устройстве 110. Последующие определения местоположения устройства 110 могут подвергаться поправке на эту задержку.
Устройство 110 дополнительно сконфигурировано для приема одного или боле отраженных сигналов 122, а также, необязательно, сигнала 130, в течение периода времени. В некоторых вариантах осуществления устройство 110 сконфигурировано для предпочтительного приема отраженных сигналов 122 и, не обязательно, сигнала 130, обладающих поляризацией сигналов 118. Часть отраженных сигналов 122 и/или сигнала 130 распространяется прямо на антенну 112. Другая часть отраженных сигналов 122 и/или сигнала 130 отражается от рефлектора 114, имея следствием один или более сигналов многолучевого распространения во время приема. Устройство также сконфигурировано для обработки одного или более отраженных сигналов, с тем чтобы выделять соответственный отраженный импульс прямого распространения в соответственном отраженном сигнале, таком как отраженный сигнал 122_1, и по меньшей мере один импульс многолучевого распространения из соответственного отраженного сигнала.
В некоторых вариантах осуществления системы 100 определения местоположения может быть два или более дополнительных устройств, таких как устройство 110, два или более дополнительных пассивных рефлекторов, таких как пассивный рефлектор 120, и/или два или более активных ориентиров, таких как активный ориентир 128. В некоторых вариантах осуществления местоположения пассивного рефлектора 120 и/или активного ориентира 128 могут быть фиксированными. В других вариантах осуществления усредненное местоположение пассивного рефлектора 120 и/или активного ориентира 128 может быть фиксированным. Пассивный рефлектор 120 и/или активный ориентир 128 могут размещаться в обозримых местах. В качестве альтернативы, пассивный рефлектор 120 и/или активный ориентир 128 могут размещаться в произвольных местоположениях, которые определяются автоматически во время начальной процедуры самокалибровки системы, и сохраняться, например, в устройстве 110. В любом случае местоположение устройства 110 определяется относительно местоположения одного или более пассивных рефлекторов, таких как пассивный рефлектор 120, и/или активных ориентиров, таких как активный ориентир 128, посредством определения одной или более дальностей. Каждая дальность имеет отношение к дистанции между устройством 110 и пассивным рефлектором 120 или активным ориентиром 128.
Дальность от устройства 110 до соответственного объекта, такого как пассивный рефлектор 120, определяется в соответствии со временем прихода соответствующего импульса прямого распространения. Для соответственного объекта на некоторой дистанции r от устройства 110 временем прихода (ToA) является:
ToA = 2 , (Уравнение 1)
, (Уравнение 1)
где c - скорость распространения электромагнитных сигналов. Скорость распространения электромагнитных сигналов, c, известна составляющей приблизительно 3,0*108 м/с в вакууме. В типичных атмосферных условиях скорость распространения электромагнитных сигналов отклоняется от этого значения на менее чем 300 ppm (миллионных долей). Применяя информацию о высоте над уровнем моря и других факторах окружающей среды, скорость распространения электромагнитных сигналов в окружающей среде системы 100 определения местоположения может быть определена до в пределах 100 ppm. Как отмечено ранее, для отраженных импульсов от необязательного активного ориентира 128 и/или активного рефлектора (в вариантах осуществления, где рефлектор является активным рефлектором) может быть дополнительная задержка Δ, ассоциативно связанная с обработкой сигналов в активном ориентире 128 и/или активном рефлекторе. Модифицированным выражением для времени прихода, для использования с активным ориентиром, является:
ToA = 2 +Δ, (Уравнение 2)
+Δ, (Уравнение 2)
Задержка Δ может не быть одинаковой для всех активных ориентиров и/или всех активных рефлекторов. Посредством поправки времени прихода на задержку Δ дальность от устройства 110 до соответственного объекта может определяться точно.
Как обсуждено ниже, дополнительные преднамеренные сигналы многолучевого распространения во время передачи и приема в системе 100 определения местоположения предусматривают дополнительную информацию, которая предоставляет возможность определяться углу, соответствующему соответственному объекту, такому как пассивный рефлектор 120. Угол и дальность между устройством 110 и соответственным объектом определяют местоположение устройства 110 относительно соответственного объекта.
В некоторых вариантах осуществления эта информация о местоположении достаточна для однозначного определения местоположения устройства 110. В других вариантах осуществления могут использоваться более чем один пассивный рефлектор 120 и/или более чем один активный ориентир 128. Например, если известны местоположения комбинации трех пассивных рефлекторов и/или активных ориентиров, которые не являются коллинеарными, например, посредством их заблаговременной съемки, и устройство 110 и пассивные рефлекторы и/или активные ориентиры расположены, по существу, в пределах двумерной плоскости, возможно однозначно определять местоположение устройства 110 по сведениям о дальности от устройства 110 до каждого из пассивных рефлекторов и/или активных ориентиров. В качестве альтернативы, если активные ориентиры 112 не являются лежащими в одной плоскости, использование комбинации четырех пассивных рефлекторов и/или активных ориентиров с известными местоположениями будет предоставлять возможность однозначного определения местоположения устройства 110 по сведениям о дальности от устройства 110 до каждого из пассивных рефлекторов и/или активных ориентиров. Алгоритмы для определения местоположения на основании одной или более дальностей хорошо известны специалисту в данной области техники. Например, смотрите «Quadratic time algorithm for the minmax length triangulation», H. Edelsbruneer and T.S. Tan, pp. 414-423 in Proceedings of the 32nd Annual Symposium on Foundations of Computer Science, 1991, San Juan, Puerto Rico («Квадратический временной алгоритм для триангуляции минимально-максимальной протяженности», Х. Идельсбрюнер и Т.С. Тан, стр. 414-423 в докладах 32-ого ежегодного Симпозиума по основам вычислительной техники, 1991, Сен-Хуан, Пуэрто-Рико), таким образом включенный в состав посредством ссылки во всей своей полноте.
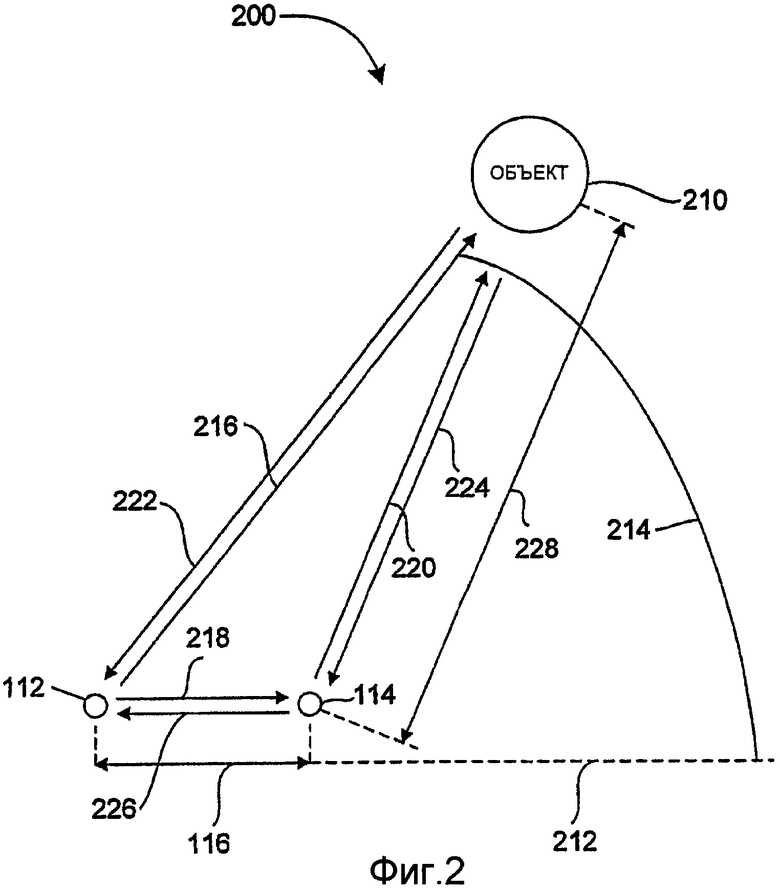
Фиг.2 иллюстрирует вариант 200 осуществления системы определения местоположения с одним или более преднамеренными сигналами многолучевого распространения. Объект 210 находится в местоположении с углом 214 относительно линии 212 и направлением, таким как направление 216, между антенной 112 (а соответственно, устройством 110 на фиг.1) и объектом 210. Антенна 112 передает сигнал прямого распространения, включающий в себя по меньшей мере один электромагнитный импульс, имеющий частоту несущего сигнала, вдоль направления 216. Антенна также передает сигнал, включающий в себя по меньшей мере один электромагнитный импульс, имеющий частоту несущего сигнала, вдоль направления 218. Рефлектор 114 будет отражать первый отраженный сигнал многолучевого распространения, включающий в себя по меньшей мере один электромагнитный импульс многолучевого распространения, вдоль направления 226. Суммарное время распространения для этого первого отраженного сигнала многолучевого распространения является достаточно коротким, чтобы, в целях определения местоположения объекта 210, первый отраженный импульс многолучевого распространения мог игнорироваться. Рефлектор 114 также будет отражать сигнал многолучевого распространения вдоль направления 220.
Сигнал прямого распространения, распространяющийся вдоль направления 216, будет отражаться от объекта 210. Будет иметь место сигнал прямого распространения, включающий в себя по меньшей мере один электромагнитный отраженный импульс, распространяющийся вдоль направления 222. Также будет иметь место сигнал многолучевого распространения, распространяющийся вдоль направления 224. Сигнал многолучевого распространения будет отражаться от рефлектора 114, создавая второй отраженный сигнал многолучевого распространения, включающий в себя по меньшей мере один электромагнитный импульс многолучевого распространения, вдоль направления 226.
Сигнал многолучевого распространения вдоль направления 220 будет отражаться от объекта 210, создавая третий отраженный сигнал многолучевого распространения, включающий в себя по меньшей мере один электромагнитный импульс многолучевого распространения, вдоль направления 222. В дополнение, будет иметь место сигнал многолучевого распространения, распространяющийся вдоль направления 224. Сигнал многолучевого распространения будет отражаться от рефлектора 114, создавая четвертый отраженный сигнал многолучевого распространения, включающий в себя по меньшей мере один электромагнитный импульс многолучевого распространения, вдоль направления 226. Отметим, что отражения более высокого порядка, создающие сигналы многолучевого распространения, пренебрегаются в этом обсуждении.
Отраженный сигнал, принимаемый устройством, будет включать в себя отраженный сигнал вдоль направления 222, второй отраженный сигнал многолучевого распространения вдоль направления 226, третий отраженный сигнал многолучевого распространения вдоль направления 222 и четвертый отраженный сигнал многолучевого распространения вдоль направления 226. Отметим, что суммарное время распространения для второго отраженного сигнала многолучевого распространения и третьего отраженного сигнала многолучевого распространения являются идентичными. Как следствие, импульсы многолучевого распространения в этих сигналах, по существу, будут совпадать друг с другом.
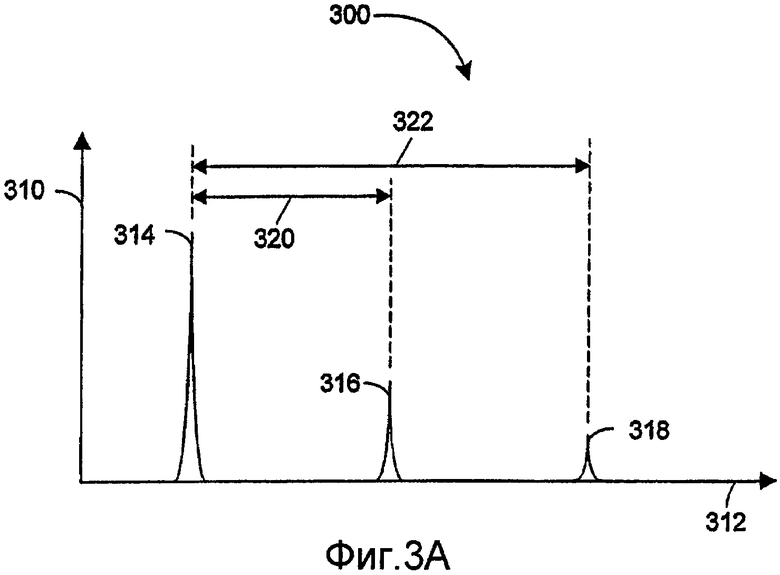
Для соответственного угла 214 отраженный сигнал 300 на устройстве 110 (фиг.1) показан на фиг.3A в качестве модуля 310 как функции времени 312. Отраженный сигнал 300 включает в себя импульс 314, соответствующий отраженному сигналу прямого распространения, импульс 316, соответствующий совпадающим импульсам многолучевого распространения во втором отраженном сигнале многолучевого распространения и третьем отраженном сигнале многолучевого распространения. Импульсы 316 имеют задержку 320 по отношению к импульсу 314, а импульс 318 имеет задержку 322 по отношению к импульсу 314. По мере того, как угол 214 (фиг.2) приближается к 0° или 180°, задержки 320 и 322 будут уменьшаться и приближаться к нулю. Это проиллюстрировано на фиг.3B задержкой 326 и задержкой 328 между импульсами в отраженном сигнале 324. Для значений угла 214 (фиг.2), по существу не равных 0° и 180°, преднамеренные сигналы многолучевого распространения дают дополнительную информацию для предоставления возможности определяться местоположению устройства 110 (фиг.1).
Возвращаясь к фиг.2, когда угол 214 равен 0° или 180°, отраженный импульс и импульсы многолучевого распространения в отраженном сигнале будут перекрываться. Для предотвращения суммарных потерь сигнала эффективная площадь отражения или профиль коэффициента направленного действия рефлектора 114 выбраны из условия, чтобы амплитуда соответственного сигнала многолучевого распространения, отраженного от рефлектора 114, была меньшей, чем амплитуда сигнала прямого распространения. В примерном варианте осуществления амплитуда соответственного сигнала многолучевого распространения, отраженного от рефлектора 114, является меньшей, чем половина амплитуды сигнала прямого распространения (тем самым, гарантируя, что отраженный импульс имеет пиковую амплитуду в соответственном отраженном сигнале, таком как отраженный сигнал 300 на фиг.3A). Это соответствует по меньшей мере четырехкратному снижению мощности от импульса 314 к импульсу 316. В примерном варианте осуществления рефлектор 114 является сферическим по форме и покрыт металлом, таким как золото, обладающим подходящей удельной проводимостью (и, соответственно, глубиной проникновения поля) для частот несущего сигнала в микроволновом диапазоне. В еще одном примерном варианте осуществления рефлектор 114 имеет форму пирамиды и покрыт металлом. В еще одном другом примерном варианте осуществления надлежащая эффективная площадь отражения рефлектора 114 определяется площадью поверхности рефлектора 114.
Поскольку местоположение рефлектора 114, включая расстояние 116, относительно антенны 112 известно, задержки, такие как задержка 320 (фиг.3A), между импульсами многолучевого распространения, такими как импульсы 316 и 318 (фиг.3A), и отраженным импульсом, таким как отраженный импульс 314 (фиг.3A), предоставляют возможность определяться углу 214. В частности, как описано ранее, время прихода отраженного импульса 316 предоставляет возможность определяться дальности между объектом 210 и устройством 110 (фиг.1). Задержки, такие как задержка 320 (фиг.3A), предоставляют возможность дополнительной длины траектории, соответствующей сумме расстояния 116 и расстояния 228. Поскольку расстояние 116 известно, это предоставляет возможность определяться расстоянию 228. Дальность, расстояние 116 и расстояние 228 предоставляют возможность определяться углу 214. Таким образом, местоположение устройства 110 (фиг.1) относительно соответственного объекта может определяться в соответствии со временем прихода одного или более импульсов многолучевого распространения.
Например, если расстояние 116 соответствует задержке распространения между антенной 112 и рефлектором 114 в 3 нс, а дальность между объектом 210 и антенной 112 соответствует 4 нс, для угла 214, равного 90°, расстояние 228 соответствует 5 нс (с использованием теоремы Пифагора), задержка 320 (фиг.3) составляет 4 нс, а задержка 322 (фиг.3) составляет 8 нс. Если расстояние 116 соответствует задержке распространения между антенной 112 и рефлектором 114 в 3 нс, а дальность между объектом 210 и антенной 112 соответствует 4 нс, для угла 214, равного 45°, расстояние 218 соответствует 2,8336 нс (с использованием теоремы косинусов), а задержка 320 (фиг.3) составляет 1,8336 нс, и задержка 322 (фиг.3) составляет 3,6672 нс.
Предыдущий расчет угла 214 предназначен только для иллюстративных целей. Есть другие, более эффективные вычислительные процедуры. Поскольку задержки, такие как задержка 320 (фиг.3A), являются функцией угла 214, для известного расстояния 116 (фиг.1), задержки, соответствующие разным значениям угла 214, могут быть сведены в таблицу. Измеренные задержки и, при условии известного профиля коэффициента направленного действия для рефлектора 114, амплитуды импульсов могут использоваться для поиска соответствующего значения угла 214.
Фиг.4 иллюстрирует альтернативный вариант 400 осуществления системы определения местоположения с одним или более преднамеренных сигналов многолучевого распространения. Система 400 определения местоположения содержит множество антенн 12, и рефлектор 114 не является коллинеарным с антеннами 112. В примерном варианте осуществления рефлектор 114 находится под углом (не показан) в 10-15° от коллинеарного. Этот вариант 400 осуществления менее восприимчив к ранее обсужденной проблеме, когда угол 214 (фиг.2) по существу равен 0° и 180°.
Другое потенциально возможное решение для проблемы, когда угол 214 (фиг.2) по существу равен 0° и 180°, состоит в том, чтобы комбинировать информацию о местоположении из системы определения местоположения при одном или более преднамеренных сигналах многолучевого распространения с дополнительной информацией о местоположении, предоставленной радиолокатором с синтезированной апертурой (SAR). Это проиллюстрировано на фиг.5A. В дополнение к определению дальности от устройства 110 до одного или более объектов 522, каждый из которых может быть пассивным рефлектором 10 (фиг.1), в локальной системе 500 определения местоположения устройство 110 перемещается со скоростью ν 510 в конкретном направлении 512 и передает один или более сигналов 118 (фиг.1), каждый из которых включает в себя по меньшей мере один электромагнитный импульс, имеющий частоту несущего сигнала.
Устройство 110 принимает один или более отраженных сигналов 122 (фиг.1) в течение периода времени. Отраженные импульсы и импульсы многолучевого распространения от соответственного объекта, такого как объект 522_1, принимаемые устройством 110, будут подвергаться доплеровскому сдвигу по частоте, в соответствии с:
f = f
c
 (Уравнение 3)
(Уравнение 3)
где f c - частота несущего сигнала, f - принимаемая частота несущего сигнала отраженного импульса одного или более импульсов многолучевого распространения, которые принимаются устройством 110, c - скорость распространения электромагнитных сигналов в атмосфере, которая заполняет окружающую среду между устройством 110 и объектом 522_1, а θ - угол 514 между направлением 512 движения устройства и прямой линией 516 между устройством 110 и объектом 522_1. (Отметим, что угол θ 514 является дополняющим до 90° угла 214 по фиг.2.) Если известна скорость ν 510 устройства 110 или по меньшей мере модуль скорости устройства 110, угол θ 514 может определяться по принимаемой частоте несущего сигнала одного или более отраженных импульсов и/или одного или более импульсов многолучевого распространения. Отметим, что для соответственной принимаемой частоты несущего сигнала, однако, есть по меньшей мере два угла, которые удовлетворяют уравнению 3. Это так, потому что для любого угла θ 0, который является решением уравнения 3, угол -θ 0 также является решением уравнения 3. На фиг.5A эти два угла соответствуют углу θ 514 между направлением 512 и линией 516 между устройством 110 и объектом 522_1, и углу -θ 520 между направлением 512 и линией 518. Как показано на фиг.5B, в некоторых вариантах осуществления, таких как вариант 524 осуществления, объект 522_1 движется со скоростью ν 526 в конкретном направлении 512 около усредненного стационарного местоположения, предоставляя углу θ 514 возможность определяться по результирующему доплеровскому сдвигу. Отметим, что в этих вариантах осуществления доплеровский сдвиг дает информацию о дополнении до 90° угла θ 514, то есть угла 214 (фиг.2).
Фиг.6 - иллюстрация компонентов в типичном устройстве 610, таком как устройство 110 (фиг.1), в варианте осуществления системы определения местоположения. Устройство включает в себя по меньшей мере одну антенну 112 и по меньшей мере один рефлектор. В некоторых вариантах осуществления устройство 610 может включать в себя по меньшей мере одну антенну с круговой поляризацией. В некоторых вариантах осуществления устройство 610 может включать в себя по меньшей мере одну антенну с линейной поляризацией. В некоторых вариантах осуществления устройство 610 может включать в себя по меньшей мере одну поляризующую антенну, которая используется для передачи и для приема. В некоторых вариантах осуществления антенна 112 может быть двухконусной, двухконусной с горизонтальным отражающим элементом, спиральной, горизонтальной ненаправленной, ненаправленной, полунаправленной или изотропной.
Устройство 610 включает в себя схему 612 входного каскада и сигнальный процессор 614 для модифицирования одного или более сигналов. Модифицирование может включать в себя усиление, фильтрацию и/или удаление модуляционного кодирования. Устройство 610 включает в себя один или более блоков (ЦПУ) 616 обработки данных, память 620 и одну или более шин 618 связи для соединения этих компонентов. Устройство 610 может включать в себя необязательный электромеханический интерфейс 636 и необязательный передвижной механизм 638 для перемещения устройства 610 в конкретном направлении, при некоторой скорости. В альтернативных вариантах осуществления некоторые или все из функциональных возможностей устройства 610 могут быть реализованы в одной или более специализированных интегральных схемах (ASIC), тем самым, устраняя необходимость в блоке 616 обработки данных либо уменьшая роль блока 616 обработки данных. Память 620 может включать в себя быстродействующее оперативное запоминающее устройство и также может включать в себя энергонезависимую память, такую как один или более магнитных дисковых запоминающих устройств. Память 620 может включать в себя запоминающее устройство большой емкости, которое расположено удаленно от блока 616 обработки данных.
Память 620 хранит операционную систему 622, которая включает в себя процедуры для обращения к различным базовым системным службам для выполнения зависимых от аппаратных средств задач. Память 620 может хранить необязательный программный модуль 624 управления передвижением. Память 620 также хранит один или более программных модулей 626. Программный модуль 626 содержит в себе инструкции для передачи одного или более сигналов, включающих в себя по меньшей мере электромагнитный импульс, имеющий частоту несущего сигнала, из устройства 610 и приема одного или более отраженных сигналов в течение периода времени. Программный модуль 626 включает в себя модуль 628 выделения импульсов для выделения отраженного импульса и одного или более импульсов многолучевого распространения из одного или более отраженных сигналов. Программный модуль 626 также включает в себя модуль 630 определения дальности и модуль 632 определения местоположения. Программный модуль 626, по выбору, может включать в себя модуль 634 расчета эффекта Доплера.
Каждый из вышеприведенных идентифицированных модулей и приложений соответствует набору инструкций для выполнения одной или более функций, описанных выше. Этим модулям (то есть, наборам инструкций) не требуется реализовываться в качестве отдельных программно реализованных программ, процедур или модулей, и, таким образом, различные поднаборы этих модулей могут комбинироваться или иным образом перекомпоновываться в различных вариантах осуществления.
Модули или наборы инструкций в памяти 620 выполняются блоком 616 обработки данных. В дополнение, устройство 610 может включать в себя исполняемые процедуры (такие как расчет поправки временной задержки для одного или более активных ориентиров и вариантов осуществления с активным рефлектором, таким как рефлектор 114 на фиг.1), подмодули, таблицы и другие структуры данных (не показаны), включающие в себя, например, местоположения одного или более пассивных рефлекторов 120 (фиг.1), активных ориентиров 128 (фиг.1) и/или временных задержек, соответствующих одному или более активным ориентирам и/или активным рефлекторам. В некоторых вариантах осуществления могут использоваться дополнительные или отличные модули и структуры данных, а некоторые из модулей и/или структур данных, перечисленных выше, могут не использоваться. В некоторых вариантах осуществления возможности устройства 610 могут быть реализованы больше в аппаратных средствах и меньше в программном обеспечении, или меньше в аппаратных средствах и больше в программном обеспечении, как известно в данной области техники.
Со ссылкой на фиг.7, активный ориентир 710, такой как активный ориентир 128 (фиг.1) в варианте осуществления локальной системы 700 определения местоположения, включает в себя по меньшей мере одну антенну 712 для приема электромагнитных импульсов и ретрансляции импульсов. Активный ориентир 710 также включает в себя развязку 714 между приемным и передающим трактами, необязательный полосовой фильтр 716 и усилитель 718. Активный ориентир 710 включает в себя модулятор 720, такой как микшер, генератор 722 сигналов и управляющую логику 726. Активный ориентир 710 может включать в себя необязательную линию 724 задержки. Активный ориентир 710 также может включать в себя необязательную электромеханическую интерфейсную схему 728 и необязательный передвижной механизм 730 для перемещения активного ориентира 710 в конкретном направлении, при некоторой скорости.
В некоторых вариантах осуществления активный ориентир 710 является стационарным. Сигнал приема, соответствующий импульсу, переданному устройством 610 (фиг.6), принимается с использованием антенны 712. Если импульс, который передается устройством 610 (фиг.6), имеет поляризацию, антенна 712 предпочтительно может принимать сигналы, обладающие поляризацией. Сигнал приема проводится через развязку 714 между приемным и передающим трактами для изоляции схем передачи и приема, необязательный полосовой фильтр 716 для полосового ограничения сигнала приема и усилитель 718 для усиления сигнала приема. В некоторых вариантах осуществления сигнал приема модулируется или кодируется в модуляторе 720 с помощью сигнала модуляции или кодирования, сформированного генератором 722 сигналов для создания модулированного сигнала передачи. Модуляция может быть амплитудной модуляцией или частотной модуляцией. Модулированный сигнал передачи проводится через необязательную линию 724 задержки и развязку 714 между приемным и передающим трактами на антенну 712, которая передает отраженный электромагнитный модулированный импульс, соответствующий модулированному сигналу передачи.
В некоторых вариантах осуществления развязкой 714 между приемным и передающим трактами является переключатель приемопередачи. В других вариантах осуществления развязка 714 между приемным и передающим трактами является решеткой, а линия 724 задержки модифицирует фазу модулированного сигнала передачи, из условия чтобы решетка направляла модулированный сигнал передачи на антенну 712. В других вариантах осуществления активный ориентир 710 включает в себя съемный источник энергии, такой как аккумулятор (не показан).
В других вариантах осуществления активный ориентир 710 содержит раздельные приемную и передающую антенны, каждая из которых имеет поляризацию импульса, передаваемого устройством 610 (фиг.6), а развязка 714 между приемным и передающим трактами и линия 724 задержки не включены в состав.
В некоторых вариантах осуществления сигнал модуляции, сформированный генератором 722 сигналов, может быть программируемым, тем самым изменяя сигнал модуляции или кодируя сигнал модуляции. Управляющая информация, соответствующая модификации генератора 722 сигналов, может кодироваться в импульсе, передаваемом устройством 610 (фиг.6). В качестве альтернативы, управляющая информация может передаваться в отдельном беспроводном сигнале между устройством 610 (фиг.6) и активным ориентиром 710. Управляющая логика 726 идентифицирует эту управляющую информацию и модифицирует настройки в генераторе 722 сигналов на основании этих инструкций.
В некоторых вариантах осуществления активный ориентир 710 является перемещаемым около усредненного фиксированного места. Управляющая логика 726 реализует эту возможность посредством сигнального интерфейса 728, который, в свою очередь, активирует механизм 730 передвижения. В некоторых вариантах осуществления механизм 730 включает в себя электродвигатель, частота вращения которого управляется уровнем напряжения постоянного тока, выдаваемого интерфейсом 728. В некоторых вариантах осуществления управляющая логика 726 выполняет эту функцию в ответ на командные сигналы из устройства 610 (фиг.6), закодированные в передаваемом импульсе с устройства 610 (фиг.6) или в отдельной беспроводной линии связи. Для того чтобы устройству 610 (фиг.6) определять угловую информацию по результирующим доплеровским сдвигам в отраженном импульсе и/или импульсе многолучевого распространения, устройству 610 (фиг.6) будет необходимо знать направление 512 (фиг.5B), в котором является перемещающимся активный ориентир 710, а также скорость ν 526 (фиг.5B).
Фиг.8 - блок-схема последовательности операций способа, иллюстрирующая вариант осуществления операций в системе определения местоположения с одним или более преднамеренными сигналами многолучевого распространения. Передается сигнал, включающий в себя один или более импульсов, имеющих частоту несущей, 812. В некоторых вариантах осуществления переданный сигнал 812 обладает конкретной поляризацией. Отраженный сигнал, включающий в себя отраженный импульс и один или более импульсов многолучевого распространения, принимается 814 в течение периода времени. В некоторых вариантах осуществления принимаемый 814 отраженный сигнал предпочтительно обладает поляризацией. Отраженный импульс и один или более импульсов многолучевого распространения 816 выделяются из отраженного сигнала. Группы импульсов 818 идентифицируются. В вариантах осуществления, где угол 214 (фиг.2) является по существу не равным 0° или 180°, типично, будет иметь три импульса в соответственной группе. Определяются задержки 820 между импульсами в соответственной группе. Определяется местоположение устройства 110 (фиг.1) относительно соответственного объекта, такого как пассивный рефлектор 120 (фиг.1), 822.
Вышеизложенное описание, в целях пояснения, использовало специальную терминологию для обеспечения исчерпывающего понимания изобретения. Однако специалисту в данной области техники будет очевидно, что специфические детали не требуются для того, чтобы осуществить изобретение на практике. Варианты осуществления выбирались и описывались для того, чтобы лучше всего разъяснять принципы изобретения и их практические применения, чтобы, тем самым, дать возможность другим специалистам в данной области техники лучше всего использовать изобретение и различные варианты осуществления с различными модификациями, которые являются подходящими для предполагаемого конкретного использования. Таким образом, предшествующее раскрытие не подразумевается исчерпывающим или ограничивающим изобретение точными раскрытыми формами. Многие модификации и варианты возможны ввиду вышеприведенных доктрин.
Подразумевается, что объем изобретения определен последующей формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ПОМОЩЬЮ СЪЕМКИ ПРИ ОСНОВНОЙ ПОЛЯРИЗАЦИИ И ПОПЕРЕЧНОЙ ПОЛЯРИЗАЦИИ | 2006 |
|
RU2407035C2 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| Комплекс создания радиопомех аппаратуре потребителей глобальных навигационных спутниковых систем | 2019 |
|
RU2726939C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АДАПТИВНОЙ СИСТЕМЫ | 1996 |
|
RU2163052C2 |
| Способ радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2018 |
|
RU2696558C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОЛОЖЕНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА, СИСТЕМА БЕСТРАНШЕЙНОГО ПОДЗЕМНОГО БУРЕНИЯ И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА | 1996 |
|
RU2175368C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩИХ МОРСКИХ ОБЪЕКТОВ | 2022 |
|
RU2810106C2 |
| АНТЕННАЯ СИСТЕМА И БАЗОВАЯ СТАНЦИЯ СИСТЕМЫ СВЯЗИ И СПОСОБ СОЗДАНИЯ В НЕЙ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ ПЕРЕДАВАЕМЫХ СИГНАЛОВ | 1994 |
|
RU2107989C1 |
Настоящее изобретение относится в целом к системам определения местоположения. Система включает в себя устройство, содержащее антенну и отражатель с известным местоположением, приближенным к антенне, которое передает по меньшей мере электромагнитный импульс, имеющий частоту несущего сигнала, при этом устройство принимает отраженный сигнал в течение периода времени, причем отраженный сигнал включает в себя отраженный импульс от объекта в пределах зоны радиолокационного обнаружения устройства и, по меньшей мере, один импульс многолучевого распространения. Устройство обрабатывает отраженный сигнал, с тем чтобы выделять отраженный импульс и, по меньшей мере, один импульс многолучевого распространения из отраженного сигнала. Устройство определяет дальность от устройства до объекта и местоположение устройства относительно объекта. Дальность определяется в соответствии со временем прихода отраженного импульса, а местоположение определяется в соответствии со временем прихода, по меньшей мере, одного импульса. Достигаемым техническим результатом изобретения является повышение точности определения местоположения. 3 н. и 21 з.п. ф-лы, 10 ил.
1. Способ определения местоположения устройства, состоящий в том, что
передают из устройства, по меньшей мере, электромагнитный импульс, имеющий частоту несущего сигнала;
принимают в устройстве отраженный сигнал в течение периода времени, при этом отраженный сигнал включает в себя отраженный импульс от объекта в пределах зоны радиолокационного обнаружения устройства и, по меньшей мере, один импульс многолучевого распространения, ассоциативно связанный с рефлектором, размещенным в известном относительно устройства местоположении, приближенном к устройству, причем упомянутый, по меньшей мере, один импульс многолучевого распространения является отраженным от объекта и отраженным или переданным от упомянутого рефлектора, размещенного в известном местоположении; и
обрабатывают отраженный сигнал, чтобы выделять отраженный импульс и, по меньшей мере, один импульс многолучевого распространения из отраженного сигнала, и чтобы определять дальность от устройства до объекта и местоположение устройства относительно объекта, при этом дальность определяют в соответствии с временем прихода отраженного импульса, а местоположение определяют в соответствии с временем прихода упомянутого, по меньшей мере, одного импульса многолучевого распространения.
2. Способ по п.1, в котором импульс поляризуют во время передачи, а при приеме предпочтительно принимают отраженный сигнал, обладающий поляризацией.
3. Способ по п.2, в котором поляризация выбрана из группы, состоящей из линейной поляризации, эллиптической поляризации, правой эллиптической поляризации, левой эллиптической поляризации, правой круговой поляризации и левой круговой поляризации.
4. Способ по п.1, дополнительно состоящий в том, что используют одну и ту же поляризованную антенну как для передачи, так и для приема.
5. Способ по п.1, в котором объектом является пассивный рефлектор.
6. Способ по п.1, в котором объектом является активный ориентир.
7. Способ по п.1, в котором рефлектором является активный рефлектор.
8. Способ по п.1, в котором рефлектором является пассивный рефлектор.
9. Способ по п.1, дополнительно состоящий в том, что
перемещают устройство при некоторой скорости в конкретном направлении, в то время как выполняют прием;
детектируют доплеровский сдвиг в отраженном импульсе в отраженном сигнале; и
определяют угол между конкретным направлением и прямой линией между устройством и объектом в соответствии с детектированным доплеровским сдвигом.
10. Способ по п.1, дополнительно состоящий в том, что
перемещают объект при некоторой скорости в конкретном направлении, в то время как выполняют прием;
детектируют доплеровский сдвиг в отраженном импульсе в отраженном сигнале; и
определяют угол между конкретным направлением и прямой линией между устройством и объектом в соответствии с детектированным доплеровским сдвигом.
11. Система определения местоположения, содержащая устройство, включающее в себя антенну и рефлектор с известным местоположением, приближенным к антенне, причем устройство сконфигурированно для передачи, по меньшей мере, электромагнитного импульса, имеющего частоту несущей, для приема отраженного сигнала в течение периода времени в приемнике, отраженный сигнал включает в себя отраженный импульс от объекта в пределах зоны радиолокационного обнаружения устройства и по меньшей мере один импульс многолучевого распространения, ассоциативно связанный с рефлектором, причем упомянутый, по меньшей мере, один импульс многолучевого распространения является отраженным от объекта и отраженным или переданным от упомянутого рефлектора, размещенного в известном местоположении, для обработки отраженного сигнала, чтобы выделять отраженный импульс и, по меньшей мере, один импульс многолучевого распространения из отраженного сигнала, и для определения дальности от устройства до объекта и местоположение устройства относительно объекта,
при этом дальность определяется в соответствии со временем прихода отраженного импульса, а местоположение определяется в соответствии со временем прихода, по меньшей мере, одного импульса многолучевого распространения.
12. Система по п.11, в которой передаваемый импульс является поляризованным, а устройство сконфигурировано для предпочтительного приема отраженного сигнала, обладающего поляризацией.
13. Система по п.12, в которой поляризация выбрана из группы, состоящей из линейной поляризации, эллиптической поляризации, правой эллиптической поляризации, левой эллиптической поляризации, правой круговой поляризации и левой круговой поляризации.
14. Система по п.11, в которой антенна сконфигурирована как для предпочтительной передачи импульса, обладающего поляризацией, так и для предпочтительного приема отраженного сигнала, обладающего поляризацией.
15. Система по п.11, в которой антенна выбрана из группы, состоящей из линейной поляризации и круговой поляризации.
16. Система по п.11, в которой антенна выбрана из группы, состоящей из двухконусной, двухконусной с горизонтальным отражающим элементом, спиральной, горизонтальной ненаправленной, ненаправленной, полунаправленной или изотропной.
17. Система по п.11, в которой устройство дополнительно включает в себя
процессор;
память;
по меньшей мере, один программный модуль, сохраненный в памяти и выполняемый процессором, по меньшей мере, один программный модуль содержит в себе инструкции для обработки отраженного сигнала, чтобы выделять отраженный импульс и, по меньшей мере, один импульс многолучевого распространения из отраженного сигнала; определения дальности от устройства до объекта и местоположения устройства относительно объекта; при этом дальность определяется в соответствии со временем прихода отраженного импульса, а местоположение определяется в соответствии со временем прихода, по меньшей мере, одного импульса многолучевого распространения.
18. Система по п.11, в которой устройство дополнительно включает в себя
механизм передвижения транспортного средства для перемещения устройства в конкретном направлении с некоторой скоростью; процессор; память; по меньшей мере, один программный модуль, сохраненный в памяти и выполняемый процессором, по меньшей мере, один программный модуль содержит инструкции для детектирования доплеровского сдвига в отраженном импульсе в отраженном сигнале; определения угла между конкретным направлением и прямой линией между устройством и объектом в соответствии с детектированным доплеровским сдвигом.
19. Система по п.11, в которой объект дополнительно включает в себя механизм для перемещения объекта в конкретном направлении при некоторой скорости; устройство включает в себя процессор; память; по меньшей мере, один программный модуль, сохраненный в памяти и выполняемый процессором, по меньшей мере, один программный модуль содержит инструкции для детектирования доплеровского сдвига в отраженном импульсе в отраженном сигнале; определения угла между конкретным направлением и прямой линией между устройством и объектом в соответствии с детектированным доплеровским сдвигом.
20. Система по п.11, в которой объектом является пассивный рефлектор.
21. Система по п.11, в которой объектом является активный ориентир.
22. Система по п.11, в которой рефлектором является активный рефлектор.
23. Система по п.11, в которой рефлектором является пассивный рефлектор.
24. Система определения местоположения, содержащая средство передачи для передачи, по меньшей мере, электромагнитного импульса, имеющего частоту несущей, средство приема для приема отраженного сигнала в течение периода времени, отраженный сигнал включает в себя отраженный импульс от объекта в пределах зоны радиолокационного обнаружения устройства и, по меньшей мере, один импульс многолучевого распространения, созданный устройством, причем упомянутый, по меньшей мере, один импульс многолучевого распространения является отраженным от объекта и отраженным или переданным от упомянутого рефлектора, размещенного в известном местоположении, средство сигнальной обработки для обработки отраженного сигнала, чтобы выделять отраженный импульс и, по меньшей мере, один импульс многолучевого распространения из отраженного сигнала, и средство определения дальности для определения дальности от устройства до объекта и местоположения устройства относительно объекта, при этом дальность определяется в соответствии со временем прихода отраженного импульса, а местоположение определяется в соответствии со временем прихода, по меньшей мере, одного импульса многолучевого распространения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU 95122626 А, 20.02.1998 | |||
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ В СИСТЕМЕ РАДИОСВЯЗИ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192709C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО НЕЛИНЕЙНО-РАССЕИВАЮЩЕГО ОБЪЕКТА | 1997 |
|
RU2119175C1 |
| US 4700306 А, 13.10.1987 | |||
| US 4636795 А, 13.01.1987 | |||
| US 5819164 А, 06.10.1998. | |||

