Эта заявка является частичным продолжением заявки № 10/614097 на выдачу патента США, зарегистрированной 3 июля 2003 г., находящаяся на рассмотрении заявка № 10/614097 на выдачу патента США во всей своей полноте включена в материалы настоящей заявки посредством ссылки.
РОДСТВЕННЫЕ ЗАЯВКИ
Следующие заявки являются родственными текущей заявке и, таким образом, включены в состав посредством ссылки:
Заявка № 11/103964 на выдачу патента США, зарегистрированная 11 апреля 2005 г., озаглавленная «Improved Radar System for Improved Positioning» («Усовершенствованная система радиолокатора для улучшенного определения местоположения»);
Заявка № 11/103965 на выдачу патента США, зарегистрированная 11 апреля 2005 г., озаглавленная «Positioning System with a Sparse Antenna Array» («Система определения местоположения с разреженной антенной решеткой»);
Заявка № 11/103950 на выдачу патента США, зарегистрированная 11 апреля 2005 г., озаглавленная «Positioning System with Intentional Multi-Path Signal» («Система определения местоположения с преднамеренным сигналом многолучевого распространения»);
Заявка № 11/104007 на выдачу патента США, зарегистрированная 11 апреля 2005 г., озаглавленная «Decoherence Plate for Use in a Communications System» («Пластина декогерентности для использования в системе связи»).
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к системам определения местоположения, а боле точно к системе и способу для определения местоположения объекта относительно системы определения местоположения с использованием съемки при основной поляризации и поперечной поляризации.
УРОВЕНЬ ТЕХНИКИ
Локальные системы определения местоположения становятся важным вспомогательным средством в мобильных устройствах, нуждающихся в возможностях навигации, особенно в применениях автономных транспортных средств и точных строительных инструментов. Глобальные системы определения местоположения, такие как GPS (глобальная система определения местоположения), предоставляют информацию местоположения только средней точности, обычно не лучшей чем 10 см, и требуют хорошей видимости практически до уровня горизонта. Локальные системы определения местоположения, с активными либо пассивными компонентами, распределенными в рабочем объеме, могут предоставить возможность определения местоположения гораздо большей точности (например, точности определения местоположения, большей чем 1 см) и предоставляют пользователю возможность расширять систему, по необходимости, для работы даже в более сложных замкнутых конфигурациях.
Традиционные локальные системы определения местоположения включают в себя системы акустической и лазерной дальнометрии. Акустические системы типично используют радиомаяки-ответчики для измерения дальности в пределах сети устройств, некоторые из которых зафиксированы для формирования локальной системы координат.
К сожалению, вследствие свойств распространения звука по воздуху, акустические системы могут измерять дальность только до точностей в сантиметры или более и только на относительно коротких дистанциях. Локальные системы определения местоположения, основанные на лазерах, используют измерение как угла, так и дальности между устройством и одним или более отражающими объектами, такими как призмы, чтобы производить триангуляцию или трилатерацию местоположения устройства. Однако, в настоящий момент, лазерные системы применяют дорогостоящие механизмы наведения, которые могут доводить себестоимость системы до $30000 или более.
Относительно недорогая (например, ниже $2000) локальная система определения местоположения, способная определять 2D (двухмерные) или 3D (трехмерные) местоположения с точностями до нескольких миллиметров, могла бы дать возможность большого набора потенциальных продуктов в таких прикладных областях, как прецизионные находящиеся в помещении и находящиеся на открытом воздухе конструкции, горные работы, точное выкашивание и протравливание сельскохозяйственных и стадионных полей. Настоящее изобретение преодолевает стоимостные и точностные ограничения традиционных локальных систем определения местоположения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Предоставлены система и способ радиолокационной съемки, предусматривающие недорогую, однако высокоточную, локальную систему определения местоположения.
В одном из вариантов осуществления способа передается первый электромагнитный импульс, имеющий частоту несущего сигнала и первую поляризацию. Первый отраженный сигнал принимается в течение соответственного периода времени. Первый отраженный сигнал предпочтительно имеет первую поляризацию. Первый отраженный сигнал включает в себя первый отраженный импульс от объекта в пределах зоны радиолокационного обнаружения системы определения местоположения. Первый отраженный сигнал обрабатывается, с тем чтобы выделить первый отраженный импульс из первого отраженного сигнала.
Передается второй электромагнитный импульс, имеющий частоту несущего сигнала и первую поляризацию. Второй отраженный сигнал принимается в течение соответственного периода времени. Второй отраженный сигнал предпочтительно имеет вторую поляризацию. Второй отраженный сигнал включает в себя второй отраженный импульс от объекта в пределах зоны радиолокационного обнаружения системы определения местоположения. Второй отраженный сигнал обрабатывается, с тем чтобы выделить второй отраженный импульс из второго отраженного сигнала. Характеристика объекта определяется в соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса.
В некоторых вариантах осуществления первой поляризацией является правая круговая поляризация, а второй поляризацией является левая круговая поляризация. В некоторых вариантах осуществления первой поляризацией является левая круговая поляризация, а второй поляризацией является правая круговая поляризация.
В одном из вариантов осуществления системы устройство сконфигурировано для передачи первого электромагнитного импульса, имеющего частоту несущего сигнала и первую поляризацию. Устройство сконфигурировано для приема первого отраженного сигнала, включающего в себя первый отраженный импульс от объекта в пределах зоны радиолокационного обнаружения системы определения местоположения, в течение соответственного периода времени. Первый отраженный сигнал предпочтительно имеет первую поляризацию. Устройство сконфигурировано для обработки первого отраженного сигнала, с тем чтобы выделять первый отраженный импульс из первого отраженного сигнала.
Устройство также сконфигурировано для передачи второго электромагнитного импульса, имеющего частоту несущего сигнала и первую поляризацию. Устройство сконфигурировано для приема второго отраженного сигнала, включающего в себя второй отраженный импульс от объекта, в течение соответственного периода времени. Второй отраженный принимаемый сигнал предпочтительно имеет вторую поляризацию. Устройство сконфигурировано для обработки второго отраженного сигнала, с тем чтобы выделять второй отраженный импульс из второго отраженного сигнала. Устройство сконфигурировано для определения характеристики объекта в соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса.
В некоторых вариантах осуществления первой поляризацией является правая круговая поляризация, а второй поляризацией является левая круговая поляризация. В некоторых вариантах осуществления первой поляризацией является левая круговая поляризация, а второй поляризацией является правая круговая поляризация.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные цели и признаки изобретения будут быстрее очевидны из последующего подробного описания и прилагаемой формулы изобретения, когда воспринимаются в соединении с чертежами.
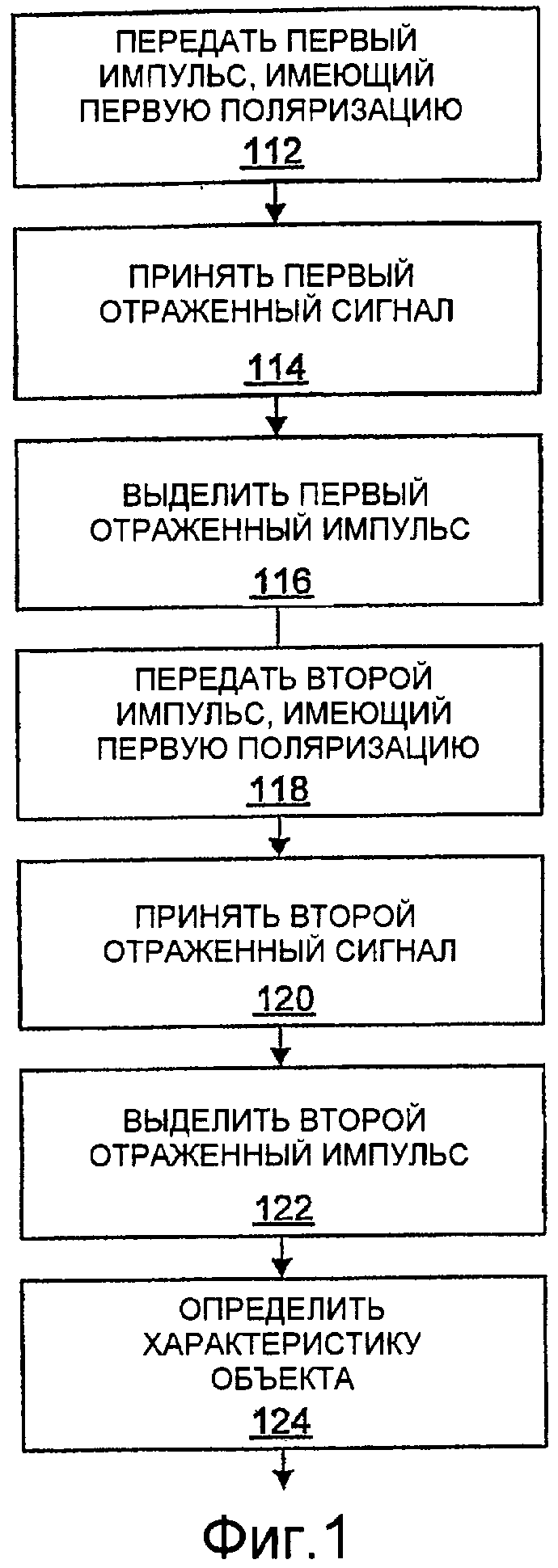
Фиг. 1 - блок-схема последовательности операций способа, иллюстрирующая операции, выполняемые в варианте осуществления системы определения местоположения.
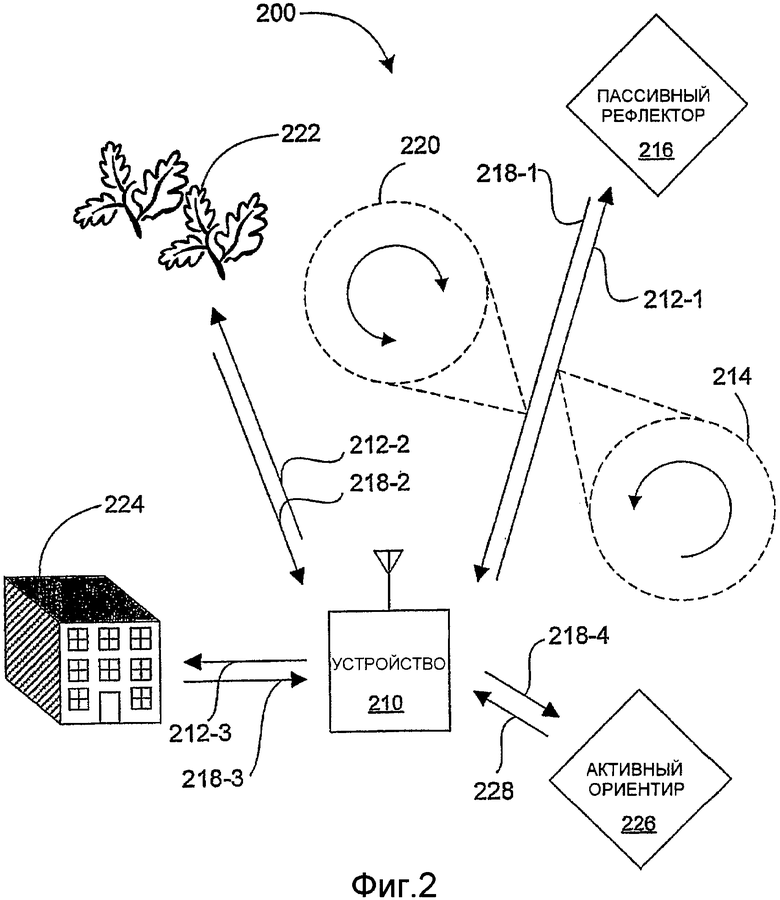
Фиг. 2 иллюстрирует вариант осуществления системы определения местоположения.
Фиг. 3 иллюстрирует вариант осуществления системы определения местоположения.
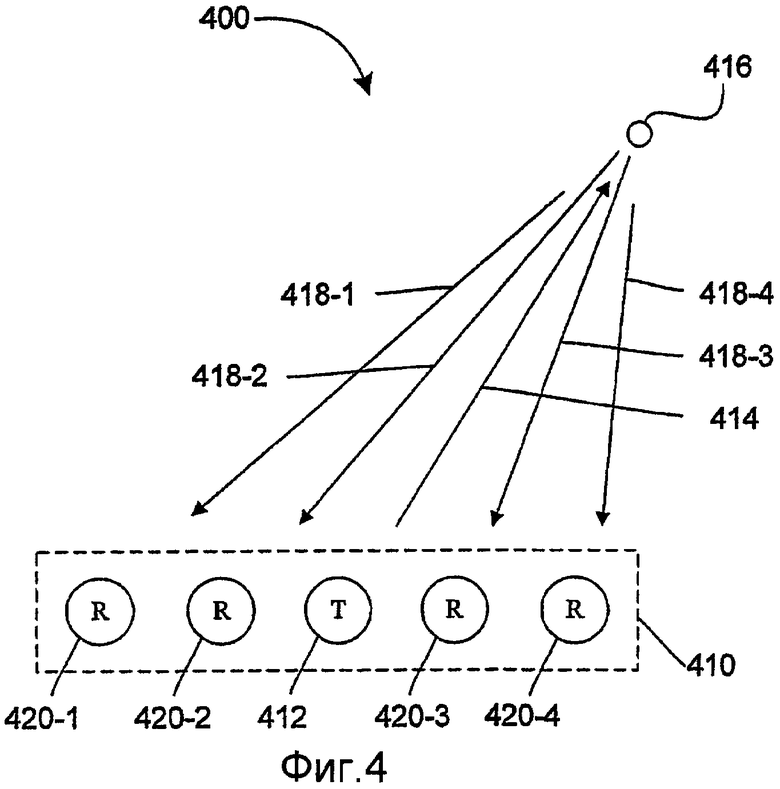
Фиг. 4 иллюстрирует вариант осуществления системы определения местоположения.
Фиг. 5 - иллюстрация типичных компонентов в устройстве по варианту осуществления системы определения местоположения.
Одинаковые номера ссылок указывают на соответствующие части на всем протяжении нескольких изображений по чертежам.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее следует подробное описание вариантов осуществления изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. В последующем подробном описании многочисленные специфичные детали изложены для того, чтобы обеспечить исчерпывающее понимание настоящего изобретения. Однако специалисту в данной области техники будет очевидно, что настоящее изобретение может быть осуществлено на практике без этих специфичных деталей. В других случаях широко известные способы, процедуры, компоненты и схемы не были описаны подробно, с тем чтобы излишне не затенять аспекты настоящего изобретения.
Электромагнитные сигналы (иногда называемые электромагнитными волнами) содержат составляющую вектора напряженности электрического поля и составляющую вектора напряженности магнитного поля. Поляризация электромагнитного сигнала описывается формой и годографом вектора напряженности электрического поля для электромагнитного сигнала в плоскости, ортогональной направлению распространения электромагнитного сигнала. Поляризация электромагнитного сигнала может включать в себя линейную поляризацию, эллиптическую поляризацию, правую эллиптическую поляризацию, левую эллиптическую поляризацию, правую круговую поляризацию (RHCP) и левую круговую поляризацию (LHCP).
Вообще, при отражении или рассеянии от объекта, поляризация электромагнитного сигнала будет изменяться вследствие изменения фазы электромагнитного сигнала. Рассеяние включает в себя зеркальное отражение и диффузное рассеяние. Изменение поляризации при зеркальном отражении является результатом различий между френелевским коэффициентом отражения для объекта и среды, в которой распространяется электромагнитный сигнал, такой как воздух. Как известно в данной области техники, френелевские коэффициенты отражения являются функцией длины волны электромагнитного сигнала, угла падения электромагнитного сигнала, комплексных показателей преломления для объекта и среды и анизотропии, если она имеет место, в комплексном показателе преломления объекта и/или среды. Изменение поляризации при диффузном рассеянии включает в себя многочисленные акты рассеяния, обусловленные шероховатостью поверхности объекта (например, коры дерева), и многочисленные акты рассеяния, обусловленные пространственными неоднородностями в показателе преломления по объему объекта (например, дерева, его ветвей и побегов или листвы).
Для электромагнитного сигнала, первоначально обладающего RHCP или LHCP, пассивная помеха, такая как дерево, будет возвращать отраженный электромагнитный сигнал, имеющий, главным образом, противоположную круговую поляризацию. В противоположность, для электромагнитного сигнала, первоначально обладающего RHCP или LHCP, уголковый рефлектор, также известный как двугранный рефлектор, имеющий две поверхности, которые являются по существу перпендикулярными, будет давать в результате отраженный электромагнитный сигнал, имеющий, главным образом, начальную круговую поляризацию.
Некоторые локальные системы определения местоположения определяют местоположение устройства, определяя одну или более дальностей от устройства до одного или более объектов, имеющих известное местоположение. В некоторых локальных системах определения местоположения объекты являются ориентирами. В некоторых локальных системах определения местоположения ориентиры являются пассивными рефлекторами, например двугранными рефлекторами. Задача в локальных системах определения местоположения с использованием пассивных рефлекторов состоит в том, чтобы различать отраженные электромагнитные сигналы, соответствующие пассивным ориентирам, и отраженные электромагнитные сигналы, соответствующие другим объектам с зоной радиолокационного обнаружения локальной системы определения местоположения. В дополнение, часто является затруднительным проводить различие между естественными объектами и объектами искусственного происхождения, такими как пассивные ориентиры.
В некоторых локальных системах определения местоположения ориентиры являются активными ориентирами. Активный ориентир принимает электромагнитный сигнал из устройства и передает отраженный электромагнитный сигнал. В некоторых вариантах осуществления отраженный электромагнитный сигнал обладает поляризацией. Поляризация отраженного сигнала может быть такой же как или иной чем поляризация принятого сигнала.
Изменения в поляризации электромагнитных сигналов после отражения от ориентиров и других объектов могут использоваться для содействия в проведении различия между отражениями от ориентиров и отражениями от других объектов. В частности, посредством передачи электромагнитного сигнала, обладающего соответственной поляризацией, и сравнения относительной интенсивности сигнала или мощности сигнала у принятого сигнала, соответствующего отраженному электромагнитному сигналу, имеющему такую же соответственную поляризацию (с основной поляризацией) или ортогональную поляризацию (с поперечной поляризацией), может определяться характеристика объекта. Например, определенной характеристикой может быть шероховатость объекта. Эта характеристика предоставляет пассивным ориентирам возможность различаться от других объектов и предоставляет объектам искусственного происхождения различаться от естественных объектов.
Например, может определяться отношение интенсивности (ортогонально поляризованного) сигнала с поперечной поляризацией к интенсивности сигнала с основной поляризацией (той же самой поляризацией). Отношение является очень низким для гладких поверхностей и повышается с шероховатостью поверхности, достигающей шероховатости поверхности, обладающей структурами, чей масштаб имеет порядок длины волны электромагнитного сигнала. Подобным образом, отношение будет высоким для многочисленных актов рассеяния, обусловленных пространственными неоднородностями в показателе преломления по объему объекта. Для гладкого пассивного двугранного рефлектора, однако, отношение будет низким.
Фиг. 2 иллюстрирует вариант осуществления локальной системы 200 определения местоположения. В некоторых вариантах осуществления зона радиолокационного обнаружения системы 200 может иметь максимальную протяженность в 50 м, 100 м, 250 м, 1000 м, 5000 м или 10000 м. Устройство 210 передает один или более электромагнитных импульсов 212, имеющих частоту несущего сигнала и первую поляризацию 214, в этой иллюстрации, LHCP. В других вариантах осуществления первой поляризацией 214 является RHCP. В одном из вариантов осуществления электромагнитный импульс 212 составляет 1 наносекунду (нс) по длительности и имеет частоту несущего сигнала в 6 гигагерц (ГГц). Другие варианты осуществления могут применять пары длительности и частоты несущего сигнала электромагнитного импульса 212: 1 нс и 24 ГГц, 5 нс и 6 ГГц и 1 нс и 77 ГГц. Многие другие длительности и частоты несущего сигнала импульса могут использоваться в других вариантах осуществления помимо этого.
Электромагнитные импульсы 212 отражаются объектами в пределах зоны радиолокационного обнаружения системы 200. Объекты включают в себя пассивный рефлектор 216, листву 222 и здание 224. Несмотря на то что фиг. 2 иллюстрирует вариант осуществления с одним устройством 210 и одним пассивным рефлектором 216, некоторые варианты осуществления могут содержать два или более устройств, два или более пассивных рефлектора или то и другое. В некоторых вариантах осуществления пассивный рефлектор 216 является пассивным двугранным рефлектором или пассивным уголковым рефлектором. Устройство 210 принимает один или более отраженных сигналов 218, включающих в себя отраженные импульсы, в течение периода времени. Поляризация 220 соответственного отраженного сигнала (порожденного отражением начального импульса(ов) от конкретного объекта), такого как отраженный сигнал 218-1 или 218-2, является либо по существу такой же, как первая поляризация 214, либо имеет вторую поляризацию, по существу ортогональную первой поляризации 214. В некоторых вариантах осуществления первой поляризацией 214 является RHCP, а поляризацией 220 является LHCP либо RHCP. В некоторых вариантах осуществления первой поляризацией 214 является LHCP, а поляризацией 220 является LHCP либо RHCP. Посредством сравнения относительных интенсивностей сигналов или мощности сигнала отраженных сигналов 218, которые имеют место с основной поляризацией и поперечной поляризацией, может определяться характеристика объекта, такая как шероховатость объекта. Это предоставляет пассивному рефлектору 216, который имеет гладкую поверхность, возможность различаться от листвы 222 и здания 224.
В частности, чтобы сформировать радиолокационную карту конкретного района (например, близлежащего или окружающего устройство 210), устройство 210 передает по меньшей мере первый импульс, такой как импульс 212-1, имеющий частоту несущего сигнала и первую поляризацию, такую как поляризация 214. Устройство принимает первый отраженный сигнал, такой как отраженный сигнал 218-1, предпочтительно имеющий первую поляризацию, такую как поляризация 220. Первый отраженный сигнал включает в себя по меньшей мере первый отраженный импульс. Устройство 210 обрабатывает первый отраженный сигнал, с тем чтобы выделять первый отраженный импульс из первого отраженного сигнала. Устройство также передает по меньшей мере второй импульс, такой как импульс 212-2, имеющий частоту несущего сигнала и первую поляризацию. Отметим, что стрелки для переданных импульсов 212 и отраженных сигналов 218 на фиг. 2 предназначены только для иллюстративных целей и необязательно указывают, что импульсы и отраженные сигналы обладают особой направленностью. В некоторых вариантах осуществления передаваемые импульсы являются изотропными, а в других вариантах осуществления они являются направленно сфокусированными.
Устройство принимает второй отраженный сигнал, такой как отраженный сигнал 218-2, предпочтительно имеющий вторую поляризацию, такую как поляризация 220, по существу ортогональную первой поляризации. Второй отраженный сигнал включает в себя по меньшей мере второй отраженный импульс. Устройство 210 обрабатывает второй отраженный сигнал, с тем чтобы выделять второй отраженный импульс из второго отраженного сигнала. Устройство 210 определяет одну или более характеристик объекта в соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса. В некоторых вариантах осуществления характеристикой является шероховатость по меньшей мере одной поверхности объекта. В примерном варианте осуществления первой поляризацией является RHCP, а второй поляризацией является LHCP. В еще одном примерном варианте осуществления первой поляризацией является LHCP, а второй поляризацией является RHCP. В еще одном другом варианте осуществления отраженные сигналы, имеющие обе поляризации, принимаются по существу одновременно в ответ на переданный импульс.
В варианте для локальной системы 200 определения местоположения объекты могут включать в себя по меньшей мере один необязательный активный ориентир 226. Активный ориентир 226 возвращает электромагнитный импульс 228, имеющий частоту несущего сигнала. Поляризация 220 отраженного электромагнитного импульса является либо по существу такой же, как первая поляризация 214, либо имеет вторую поляризацию, по существу ортогональную первой поляризации 214. В некоторых вариантах осуществления отраженный электромагнитный импульс 228 имеет вторую частоту несущего сигнала, отличную от частоты несущего сигнала. В некоторых вариантах осуществления отраженный электромагнитный импульс 226 является амплитудно или частотно модулированным. В некоторых вариантах осуществления отраженный электромагнитный импульс 226 является меандром. В некоторых вариантах осуществления отраженный электромагнитный импульс 226 является кодированным. Например, отраженный электромагнитный импульс может кодироваться с использованием амплитудной манипуляции, квадратурной амплитудной модуляции, частотной манипуляции без разрыва фазы, частотной манипуляции, фазовой манипуляции, дифференциальной фазовой манипуляции, квадратурной фазовой манипуляции, манипуляции с минимальным сдвигом, гауссовской манипуляции с минимальным частотным сдвигом, фазоимпульсной модуляции, амплитудно-импульсной модуляции, широтно-импульсной модуляции, модуляции кодами Уолша, модуляции золотым кодом, модуляции кодом Баркера, модуляции псевдослучайными шумовыми последовательностями или кодов без постоянной составляющей, обладающих автокорреляцией в 1 при нулевом временном сдвиге, по существу близкой к нулю при ненулевом временном сдвиге. Использование активного ориентира 226 предоставляет отраженному электромагнитному импульсу 228 возможность различаться на больших расстояниях от устройства 210 в локальной системе 200 определения местоположения.
Фиг. 1 - блок-схема последовательности операций способа, иллюстрирующая вариант осуществления операций в системе определения местоположения при радиолокационной съемке с основной поляризацией и с поперечной поляризацией. Передается 112 первый импульс, имеющий первую поляризацию. Принимается 114 первый отраженный сигнал, включающий в себя по меньшей мере первый отраженный импульс. Первый отраженный сигнал обрабатывается, с тем чтобы выделить первый отраженный импульс 116. Передается 118 второй импульс, имеющий первую поляризацию. Принимается 120 второй отраженный сигнал, включающий в себя по меньшей мере второй отраженный импульс. Второй отраженный сигнал обрабатывается, с тем чтобы выделить второй отраженный импульс 122. В соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса определяется 124 характеристика объекта.
Фиг. 3 - иллюстрация варианта 300 осуществления системы определения местоположения. Устройство 310 включает в себя множество передатчиков 312 и приемник 320. Устройство 310 передает по меньшей мере первый набор импульсов 314. Импульсы 314 рассеиваются от объекта 316. Устройство 310 принимает отраженный сигнал 318.
Фиг. 4 - иллюстрация варианта 400 осуществления системы определения местоположения. Устройство 410 включает в себя один передатчик 412 и множество приемников 420. Устройство 410 передает по меньшей мере первый импульс 414. Импульс 414 рассеивается от объекта 416. Устройство 410 принимает набор отраженных сигналов 418.
Фиг. 5 - иллюстрация компонентов в типичном устройстве 510, таком как устройство 210, устройство 310 и устройство 410, в варианте осуществления системы определения местоположения. Один или более передатчиков и один или более приемников в устройстве 510 не показаны. Устройство включает в себя по меньшей мере одну антенну 508. В некоторых вариантах осуществления устройство 510 может включать в себя по меньшей мере одну антенну с круговой поляризацией. В некоторых вариантах осуществления устройство 510 может включать в себя по меньшей мере одну поляризующую антенну, которая используется для передачи и для приема. В одном из вариантов осуществления устройство 510 включает в себя две антенны, одну - для передачи и приема сигналов с RHCP, а другую - для передачи и приема сигналов с LHCP.
Устройство 510 включает в себя схему 512 входного каскада и сигнальный процессор 514 для модифицирования одного или более сигналов. Модифицирование может включать в себя усиление, фильтрацию и/или удаление модуляционного кодирования. Устройство 510 включает в себя один или более блоков (ЦПУ) 516 обработки данных, память 520 и одну или более шин 518 связи для соединения этих компонентов. В альтернативных вариантах осуществления некоторые или все из функциональных возможностей устройства 510 могут быть реализованы в одной или более специализированных интегральных схемах (ASIC), тем самым, устраняя необходимость в блоке 516 обработки данных либо уменьшая роль блока 516 обработки данных. Память 520 может включать в себя быстродействующее оперативное запоминающее устройство и также может включать в себя энергонезависимую память, такую как один или более магнитных дисковых запоминающих устройств. Память 520 может включать в себя запоминающее устройство большой емкости, которое расположено удаленно от блока 516 обработки данных.
Память 520 хранит операционную систему 522, которая включает в себя процедуры для обращения к различным базовым системным службам для выполнения зависимых от аппаратных средств задач. Память 520 также хранит один или более программных модулей 524. Программный модуль 524 включает в себя модуль выделения импульса или набор инструкций 526 для выделения одного или более импульсов из отраженных сигналов. Программный модуль 524 также включает в себя модуль определения характеристики объекта или набор инструкций 528 для определения характеристики объекта в соответствии с относительными интенсивностями сигналов у отраженных сигналов с основной поляризацией и с поперечной поляризацией.
Модули или набор инструкций в памяти 520 выполняются блоком 516 обработки данных. В дополнение, устройство 510 может включать в себя исполняемые процедуры, подмодули, таблицы и другие структуры данных (не показаны). В некоторых вариантах осуществления могут использоваться дополнительные или отличные модули и структуры данных, а некоторые из модулей и/или структур данных, перечисленных выше, могут не использоваться. В некоторых вариантах осуществления возможности устройства 510 могут быть реализованы больше в аппаратных средствах и меньше в программном обеспечении или меньше в аппаратных средствах и больше в программном обеспечении, как известно в данной области техники.
Вышеизложенное описание, в целях пояснения, использовало специальную терминологию для обеспечения исчерпывающего понимания изобретения. Однако специалисту в данной области техники будет очевидно, что специфические детали не требуются для того, чтобы осуществить изобретение на практике. Варианты осуществления выбирались и описывались для того, чтобы лучше всего разъяснять принципы изобретения и их практические применения, чтобы, тем самым, дать возможность другим специалистам в данной области техники лучше всего использовать изобретение и различные варианты осуществления с различными модификациями, которые являются подходящими для предполагаемого конкретного использования. Таким образом, предшествующее раскрытие не подразумевается исчерпывающими или ограничивающими изобретение точными раскрытыми формами. Многие модификации и варианты возможны ввиду вышеприведенных доктрин.
Подразумевается, что объем изобретения определен последующей формулой изобретения и ее эквивалентами.


Предоставлена локальная система определения местоположения, использующая радиолокационную съемку с основной поляризацией или с поперечной поляризацией. В одном из вариантов осуществления способа передается по меньшей мере первый электромагнитный импульс, обладающий первой поляризацией, первый отраженный сигнал, предпочтительно имеющий первую поляризацию, принимается в течение соответственного периода времени, первый отраженный сигнал обрабатывается, с тем чтобы выделять первый отраженный импульс, соответствующий объекту в пределах зоны радиолокационного обнаружения системы определения местоположения, также передается, по меньшей мере, второй электромагнитный импульс, имеющий первую поляризацию, второй отраженный сигнал, предпочтительно имеющий вторую поляризацию, принимается в течение соответственного периода времени, второй отраженный сигнал обрабатывается, с тем чтобы выделять второй отраженный импульс, соответствующий объекту, при этом характеристика объекта определяется в соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса. Достигаемый технический результат - повышение точности определения местоположения объекта. 2 н. и 20 з.п. ф-лы, 5 ил.
1. Способ определения местоположения мобильного устройства мобильной локальной системой определения местоположения, связанной с мобильным устройством, содержащий этапы, на которых:
передают, по меньшей мере, первый электромагнитный импульс, имеющий частоту несущего сигнала и первую поляризацию, с мобильного устройства;
принимают первый отраженный сигнал в течение соответственного периода времени, при этом первый отраженный сигнал включает в себя, по меньшей мере, первый отраженный импульс от ориентира, имеющего известное местоположение в пределах зоны радиолокационного обнаружения системы определения местоположения, а прием состоит в том, что предпочтительно принимают сигналы, обладающие первой поляризацией;
обрабатывают первый отраженный сигнал, с тем, чтобы выделять первый отраженный импульс из первого отраженного сигнала;
передают второй электромагнитный импульс, имеющий частоту несущего сигнала и первую поляризацию, с устройства;
принимают второй отраженный сигнал в течение соответственного периода времени, при этом второй отраженный сигнал включает в себя, по меньшей мере, второй отраженный импульс от ориентира в пределах зоны радиолокационного обнаружения системы определения местоположения, а прием состоит в том, что предпочтительно принимают сигналы, обладающие второй поляризацией;
обрабатывают второй отраженный сигнал, с тем, чтобы выделять второй отраженный импульс из второго отраженного сигнала; и
определяют дальность до и характеристику ориентира в соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса; и
определяют местоположение мобильного устройства на основе дальности до ориентира.
2. Способ по п.1, в котором первой поляризацией является правая круговая поляризация, а второй поляризацией является левая круговая поляризация.
3. Способ по п.1, в котором первой поляризацией является левая круговая поляризация, а второй поляризацией является правая круговая поляризация.
4. Способ по п.1, дополнительно состоящий в том, что используют одну и ту же поляризованную антенну, как для передачи, так и для приема.
5. Способ по п.1, в котором передача с устройства использует один передатчик, а прием в устройстве использует множество приемников.
6. Способ по п.1, в котором передача с устройства использует множество передатчиков, а прием в устройстве использует один приемник.
7. Способ по п.1, в котором ориентиром является активный ориентир.
8. Способ по п.1, в котором ориентиром является пассивный рефлектор.
9. Способ по п.1, в котором характеристикой ориентира является шероховатость, по меньшей мере, одной поверхности ориентира.
10. Мобильная локальная система определения местоположения, содержащая:
мобильное устройство, сконфигурированное для передачи, по меньшей мере, первого электромагнитного импульса, имеющего частоту несущего сигнала и первую поляризацию, для приема первого отраженного сигнала, включающего в себя, по меньшей мере, первый отраженный импульс от ориентира, имеющего известное местоположение в пределах зоны радиолокационного обнаружения системы определения местоположения в течение соответственного периода времени, для обработки первого отраженного сигнала, с тем, чтобы выделять первый отраженный импульс из первого отраженного сигнала, для передачи, по меньшей мере, второго электромагнитного импульса, имеющего частоту несущего сигнала и первую поляризацию, для приема второго отраженного сигнала, включающего в себя второй отраженный импульс от ориентира, в течение соответственного периода времени, для обработки второго отраженного сигнала, с тем, чтобы выделять второй отраженный импульс из второго отраженного сигнала, и для определения дальности до и характеристики ориентира в соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса,
при этом устройство предпочтительно принимает первый отраженный сигнал, обладающий первой поляризацией, и второй отраженный сигнал, обладающий второй поляризацией; и
мобильное устройство сконфигурировано для определения местоположения мобильного устройства на основе дальности до ориентира.
11. Система определения местоположения по п.10, в которой первой поляризацией является правая круговая поляризация, а второй поляризацией является левая круговая поляризация.
12. Система определения местоположения по п.10, в которой первой поляризацией является левая круговая поляризация, а второй поляризацией является правая круговая поляризация.
13. Система определения местоположения по п.10, в которой ориентиром является активный ориентир.
14. Система определения местоположения по п.10, в которой ориентиром является пассивный рефлектор.
15. Система определения местоположения по п.14, в которой пассивный рефлектор выбран из группы, состоящей из двугранного и уголкового.
16. Система определения местоположения по п.10, в которой устройство дополнительно включает в себя, по меньшей мере, одну антенну с круговой поляризацией.
17. Система определения местоположения по п.10, в которой устройство дополнительно включает в себя, по меньшей мере, одну поляризующую антенну, при этом устройство использует поляризующую антенну для передачи и для приема.
18. Система определения местоположения по п.10, в которой устройство дополнительно включает в себя передатчик и множество приемников, при этом устройство осуществляет передачу с использованием передатчика, и устройство осуществляет прием с использованием множества приемников.
19. Система определения местоположения по п.10, в которой устройство дополнительно включает в себя множество передатчиков и приемник, при этом устройство осуществляет передачу с использованием множества передатчиков, и устройство осуществляет прием с использованием приемника.
20. Система определения местоположения по п.10, в которой устройство дополнительно включает в себя процессор, при этом процессор обрабатывает первый отраженный сигнал, с тем, чтобы выделять первый отраженный импульс, обрабатывает второй отраженный сигнал, с тем, чтобы выделять второй отраженный импульс, и определяет характеристику ориентира в соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса.
21. Система определения местоположения по п.10, в которой устройство дополнительно включает в себя процессор, память и, по меньшей мере, один программный модуль, по меньшей мере, один программный модуль содержит в себе инструкции для:
выделения первого отраженного импульса из первого отраженного сигнала;
выделения второго отраженного импульса из второго отраженного сигнала; и
определения характеристики ориентира в соответствии с относительной интенсивностью сигнала первого отраженного импульса и второго отраженного импульса.
22. Система определения местоположения по п.10, в которой характеристикой ориентира является шероховатость, по меньшей мере, одной поверхности ориентира.
| US 3001193 А, 19.09.1961 | |||
| СПОСОБ ОТОБРАЖЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ЭЛЕКТРОННОЙ КАРТЕ МЕСТНОСТИ В РАДИОСИСТЕМАХ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 2001 |
|
RU2207632C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| ОХРАННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2229398C1 |
| US 3268891 A, 23.08.1966 | |||
| US 5982329 A, 09.11.1999 | |||
| СПОСОБ АНТИСТАТИЧЕСКОЙ ОБРАБОТКИ ТЕРМОПЛАСТИЧНЫХ ПОЛИМЕРОВ | 0 |
|
SU308585A1 |
| US 5406290 A, 11.04.1995 | |||
| СПОСОБ ПОЛУЧЕНИЯ ЗАЩИТНО-РАЗДЕЛИТЕЛЬНОГО ПОКРЫТИЯ | 2002 |
|
RU2258577C2 |

