Область техники
Изобретение относится к области гидроакустики и может быть использовано в станциях шумопеленгования, имеющих разнесенные в горизонтальной плоскости антенны, для решения задач пассивного определения координат шумящего в море объекта, а именно, пеленга, дистанции и глубины погружения объекта.
Уровень техники
Определение координат шумящего подводного объекта в режиме шумопеленгования является одной из актуальных проблем гидроакустики. Решение этой проблемы для быстродвижущихся объектов в сложных помехо-сигнальных условиях является наиболее сложным. Объясняется это скоротечностью происходящих процессов в этих условия и быстрым перемещением морских объектов, требующим использования оперативных и высокоточных методов определения координат шумящих объектов.
В настоящее время, для решения этой проблемы, практическое применение нашло ограниченное число методов, а именно: акустико-геометрический, энергетический (спектральный), пространственно-временной, триангуляционный и разностно-дальномерный [1-13]. Наибольшую точность и оперативность определения координат морских объектов при освещении ближней остановки обеспечивает разностно-дальномерный метод. Но при расположении разнесенных антенн вдоль линии в горизонтальной плоскости метод не позволяет одновременно с пеленгом и дистанцией до шумящего морского объекта определять глубину его погружения и угол места. При этом для определения дистанции до объекта этим методом необходимо вдоль линии в горизонтальной плоскости разместить три разнесенные антенны, расстояние между которыми будет определять погрешность измерения дистанции до объекта. Чем больше расстояние между соседними антеннами, тем меньше погрешность измерения дистанции.
Наиболее близким прототипом к предлагаемому изобретению является способ определения координат шумящих морских объектов по патенту США № 4910719, МПК G01S 5/18, заявл. 20.04.1988, опубл. 20.03.1990 [5]. В соответствии с прототипом осуществляют прием сигналов шумящих морских объектов на три разнесенные в горизонтальной плоскости антенны, расположенные в пространстве с известными координатами, производят предварительную обработку принятых сигналов, включающую ориентацию характеристик направленности антенн в направлении ожидаемого расположения источника излучения, определяют взаимно корреляционные функции сигналов принимаемых парами разнесенных антенн, измеряют временные задержки между приходом сигналов на эти антенны во взаимно корреляционных функциях, определяют скорость звука в воде и по измеренным значениям временных задержек во взаимно корреляционных функциях, скорости звука в воде и известным координатам расположения антенн определяют пеленг и дистанцию до шумящего морского объекта.
Недостатками способа-прототипа является то, что он из-за горизонтального разноса антенн не позволяет одновременно с пеленгом и дистанцией до шумящего морского объекта определять глубину его погружения и угол места. А также то, что погрешность измерения дистанции до объекта ограничена расстоянием между разнесенными антеннами.
Сущность изобретения
Сущность изобретения заключается в разработке эффективного способа определения пеленга, дистанции, глубины погружения и угла места шумящего морского объекта при наличии всего двух разнесенных в горизонтальной плоскости антенн.
Для этого в способе определения координат шумящих морских объектов, содержащем прием сигналов шумящих морских объектов на разнесенные в горизонтальной плоскости антенны, расположенные в пространстве с известными координатами, предварительную обработку принятых сигналов, включающую ориентацию характеристик направленности антенн в направлении ожидаемого расположения источника излучения, определение взаимно корреляционной функции сигналов принимаемых двумя антеннами, измерение временных задержек между приходом сигналов на эти антенны во взаимно корреляционной функции, определение скорости распространения звука в воде, дополнительно определяют автокорреляционные функции сигналов принимаемых каждой из двух антенн, измеряют временные задержки между приходом сигналов, распространяющихся по прямому и отраженному от поверхности моря путям на каждую из двух антенн в автокорреляционных функциях и по измеренным значениям временных задержек в автокорреляционных и взаимно корреляционной функциях, скорости звука в воде и известным координатам расположения антенн определяют пеленг, дистанцию, глубину погружения и угол места шумящего морского объекта.
Существенные признаки, характеризующие изобретение
Ограничительные: прием сигналов шумящих морских объектов на разнесенные в горизонтальной плоскости антенны, расположенные в пространстве с известными координатами, предварительная обработка принятых сигналов, включающая ориентацию характеристик направленности антенн в направлении ожидаемого расположения источника излучения, определение взаимно корреляционной функции сигналов принимаемых двумя антеннами, измерение временных задержек между приходом сигналов на эти антенны во взаимно корреляционной функции, определение скорости звука в воде.
Отличительные: определение автокорреляционных функций сигналов принимаемых каждой из двух антенн, измерение временных задержек между приходом сигналов, распространяющихся по прямому и отраженному от поверхности моря путям на каждую из двух антенн в автокорреляционных функциях и по измеренным значениям временных задержек в автокорреляционных и взаимно корреляционной функциях, скорости звука в воде и известным координатам расположения антенн определение пеленга, дистанции, глубины погружения и угла места шумящего морского объекта.
Раскрытие изобретения
Для определения координат морских объектов в режиме шумопеленгования гидроакустическими средствами с разнесенными антеннами могут быть использованы особенности распространения акустических волн в водной среде, обусловленные наличием многолучевого характер распространения акустических волн в океане [1, 2]. Многолучевой характера распространения акустических волн с одной стороны приводит к появлению дополнительных информационных параметров от разнесенных в вертикальной плоскости мнимых антенн, а с другой стороны усложняет измерение и использование временных задержек между приходом акустических волн на разнесенные в горизонтальной плоскости антенны.
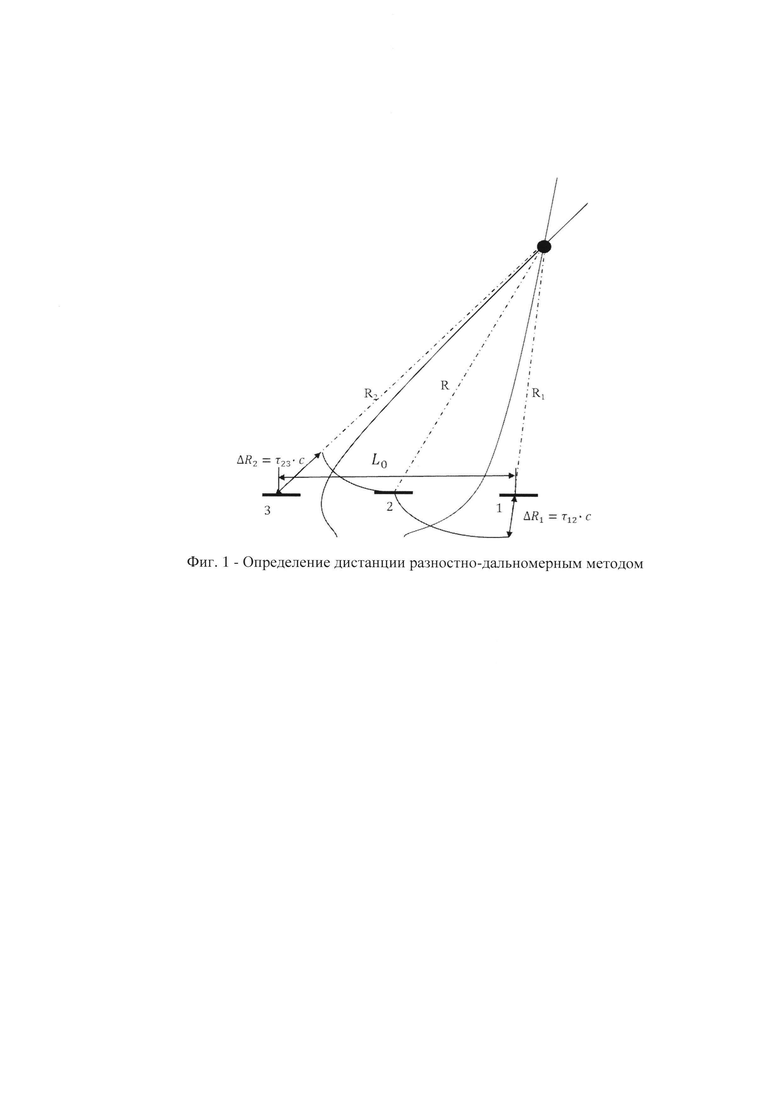
Для определения координат целей (пеленга, дистанции) в квазиреальном масштабе времени используется разностно-дальномерный метод, основанный на измерении временных задержек между приходом сигналов на разнесенные антенны (фиг. 1). Для однозначного определения дистанции до источника излучения этим методом используются три разнесенные в пространстве приемные антенны. Как правило, разнос антенн производится по одной линии в горизонтальной плоскости [2], а пеленг и дистанция до цели определяются на плоскости, проходящей через шумящий объект и приемные антенны.
Местоположением объекта при использовании разностно-дальномерного метода [3] является точка пересечения двух гипербол на этой плоскости, соответствующих постоянной разности расстояний от двух пар точек приема до возможного положения объекта (τ12, τ23). При разнесении приемных антенн вдоль прямой линии на равные расстояния L0/2 дистанция до этой точки вычисляется по формуле:

Погрешность определения дистанции для разностно-дальномерного метода зависит от размера базы, курсового угла на шумящий морской объект, временных задержек между приходом сигналов на разнесенные приемные антенны, средней скорости звука, погрешности их определения и дистанции до объекта и вычисляется по формуле:

Приемные системы из разнесенных приемных антенн могут быть эффективно использованы для определения координат на малых дистанциях (1-3 км), где актуальным является получение полного перечня координат цели (пеленга, дистанции, глубины и угла места). Важным также является сокращение числа приемных антенн до двух. Решить эти задачи можно используя особенности распространения акустических волн в водной среде. На рассматриваемых дистанциях поле в точке приема формируется, в основном, за счет прямой и отраженной от поверхности моря акустических волн. Это, в свою очередь, приводит к интерференционному искажению спектра сигнала, принимаемого антенной, и появлению корреляционного максимума в автокорреляционной функции сигнала, связанного с временной задержкой между приходом прямой и отраженной от поверхности моря акустических волн. Для иллюстрации на фиг. 2 представлены результаты динамического спектрального (фиг. 2а) и автокорреляционного (фиг. 2б) анализов шумового сигнала, излучаемого на глубине 100 м на дистанции 1.5 км от расположения приемной системы. Прием сигнала осуществлялся на ненаправленную систему, опускаемую с постоянной скоростью около 0.42 м/с.
Спуск приемной системы осуществлялся от поверхности моря до 630 м. На фиг. 2а по оси абсцисс отложена частота в кГц, на фиг. 2б - временная задержка в мс. По оси ординат слева отложено текущее время с момента начала спуска приемной системы в мин, а справа - глубина погружения приемной системы. Яркость на фигурах характеризует текущий уровень спектральной мощности и автокорреляционной функции принимаемого сигнала. На фиг. 2 видно, что в спектре сигнала возникают интерференционные искажения период по частоте (Δf) которых обратно пропорционален временной задержке между временами прихода прямой (t1) и отраженной (t1n) от поверхности океана акустических волн.

где τ11п=t1п - t1.
В автокорреляционной функции эта временная задержка в зависимости от глубины погружения приемной системы изменялась от 0 до 40 мс. Временная задержка между прямым и отраженным от поверхности моря акустическими волнами наблюдалась на всех глубинах погружения приемной системы. Точность ее измерения определялась полосой принимаемого сигнала. Отрыв от поверхности моря отражающейся акустической волны происходил на глубине погружения приемной системы от 0 м до 110 м. На глубинах от 110 м до 630 м наблюдалось практически линейное изменение временной задержки между прямым и отраженным от поверхности моря акустическими волнами от глубины погружения приемной системы.
Рассмотрим ситуацию определения координат объекта двумя разнесенными в горизонтальной плоскости приемными системами в этих условиях наблюдения. Схематически приемная система наблюдения представлена на фиг. 3. На фигуре в плоскости проходящей через приемные системы точками 1 и 2 обозначены первая и вторая приемная системы находящиеся на глубине Н, а точками 1п и 2п обозначены соответствующие им мнимые (за счет отражения от поверхности моря) приемные системы. Точкой S обозначен объект. Расстояния от цели до приемных антенн 1, 1п, 2, 2п - Р1, R1п, R2, R2п соответственно. Очевидно, что для рассматриваемой приемной системы можно найти шесть вариантов временных задержек между приходом акустических волн на различные пары приемных антенн, а именно:

где С - скорость распространения звука.
Временные задержки между приходом сигналов τ11п и τ22п можно измерить с помощью автокорреляционного анализа сигналов принимаемых первой и второй приемными антеннами соответственно, а временные задержки между приходом сигналов τ12, τ12п, τ1п2, τ1п2п можно измерить с помощью взаимного корреляционного анализа принимаемых сигналов. Взаимосвязь временных задержек легко позволяет определить, к какой из пар приемных антенн они относятся. В пространстве возможное местоположение объекта для каждой пары приемных антенн определяется гиперболоидом вращения соответствующего постоянной разности расстояний от двух точек приема до возможного положения цели. Пример построения этой поверхности для приемных антенн 1 и 2 по временной задержки т12 представлен на фиг. 4. При расчетах глубина приемных систем была выбрана равной 100 м, расстояние между горизонтально разнесенными приемными антеннами 100 м. Приемные антенны располагались вдоль оси X. Начало координат в горизонтальной плоскости было привязано ко второй приемной антенне. По глубине начало координат привязано к поверхности моря. Курсовой угол отсчитывался от оси X. Шумящий объект находился на дистанции 500 м от первой приемной антенны на глубине 100 м по курсовому углу 130°. На фиг. 4 видно, что использование информации о временной задержке между приходом акустических волн для одной пары приемных антенн позволяет определить местоположение шумящего объекта на поверхности усеченной границами акустического волновода. Использование информации о временной задержке между приходом акустических волн для двух пар приемных антенн позволяет определить местоположение цели на линии пересечения двух поверхностей, соответствующих каждой из этих пар антенн. А использование информации о временной задержке между приходом акустических волн для трех пар приемных антенн позволяет однозначно определить местоположение объекта в точке пересечения трех поверхностей.
Для иллюстрации на фиг. 4 представлены результаты построения поверхностей возможного положения объекта для приемных антенн 1 и 2 по временной задержке τ12, 1 и 1п по временной задержке τ11п, 2 и 2п по временной задержке τ22п. Из фиг. 4 видно, что местоположение объекта однозначно определяется в точке с координатами близкими к координатам по дистанции 500 м, глубине 100 м и курсовому углу 130°.
Следовательно, использование временных задержек между приходом сигналов на две разнесенные в горизонтальной плоскости приемные антенны и мнимые приемные антенны, обусловленные отражением акустических волн от морской поверхности, позволяет однозначно определять дистанцию, глубину погружения, курсовой угол и угол места объекта в режиме шумопеленгования разностно-дальномерным методом. При этом временные задержки между приходом сигналов на разнесенные антенны измеряются с помощью автокорреляционного и взаимного корреляционного анализа сигналов. Изменение глубины погружения приемных систем и комбинаций используемых приемных антенн позволяет изменять параметры измеряемых временных задержек между приходом сигналов на приемные антенны и оптимизировать точность определения координат шумящего объекта.
Осуществление изобретения
Способ осуществляется следующим образом.
1. На носителе шумопеленгаторной станции, имеющего разнесенные на известное расстояние в горизонтальной плоскости антенны, в районе работы производят определение вертикального распределения скорости звука по глубине.
2. Измеряют глубину погружения шумопеленгаторной станции.
3. Производят ориентацию характеристик направленности антенн в направлении ожидаемого расположения источника излучения.
4. Производят взаимно корреляционную обработку сигналов, принимаемых двумя антеннами, и измеряют временные задержки между приходом сигналов на антенны.
5. Производят автокорреляционную обработку сигналов, принимаемых каждой из двух антенн и измеряют временные задержки между приходом сигналов распространяющихся по прямому и отраженному от поверхности моря путям на каждую из двух антенн.
6. Определяют пеленг, дистанцию, глубину погружения и угол места шумящего морского объекта по измеренным значением временных задержек в автокорреляционных и взаимно корреляционной функциях, скорости распространения звука в воде и известным координатам расположения антенн.
Источники информации
1. Телятников, В.И. Методы и устройства для определения местоположения источников звука / В.А. Телятников // Зарубежная радиоэлектроника. - 1978. - №4. - С. 66-86.
2. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы СПб: Наука. 2004. С. 410.
3. Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике Л.: Судостроение, 1988. С. 288.
4. Патент США № 347803. Система определения направления. Заявл. 12.05.1971, опубл. 30.03.1976 г.
5. Патент США № 4910719. Метод пассивной звуковой телеметрии. МПК G01S 5/18, заявл. 20.04.1988, опубл. 20.03.1990 (прототип).
6. Патент США № 4480322. Пассивная акустическая система подводного измерения дальности. МПК G01S 3/80; G01S 5/18, заявл. 05.04.1982, опубл. 30.10.1984.
7. Патент РФ № 2507531. Способ пассивного определения координат источника излучения. МПК G01S 3/80. Заявл. 08.11.2012, опубл. 20.02.2014, бюл. №5.
8. Патент РФ № 2623831. Способ пассивного определения координат движущегося источника излучения. МПК G01S 3/80. Заявл. 30.08.2016, опубл. 29.06.2017, бюл. №19.
9. Патент РФ № 2658519. Способ определения координат движущегося источника излучения пассивным гидролокатором. МПК G01S 3/80. Заявл. 26.05.2017, опубл. 21.06.2018, бюл. №18.
10. Патент РФ № 2680860. Способ пассивного определения координат источников гидроакустического излучения. МПК G01S 3/80. Заявл. 07.12.2017, опубл. 28.02.2019, бюл. №7.
11. Патент РФ № 2711432. Способ пассивного определения координат источников гидроакустического излучения. МПК G01S 3/80. Заявл. 06.01.2018, опубл. 17.01.2020, бюл. №2.
12. Патент РФ № 2724315. Способ пассивного определения координат движущихся слабого источника излучения. МПК G01S 3/80. Заявл. 12.02.2019, опубл. 22.06.2020, бюл. №18.
13. Патент РФ на полезную модель №167932. Система пассивного определения дистанции гидроакустического комплекса подводной лодки. МПК G01S 3/08. Заявл 01.09.2016, опубл. 12.01.2017, бюл. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| Способ пассивного определения координат шумящего в море объекта | 2022 |
|
RU2797780C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
| Способ определения координат шумящих объектов с использованием вертикально развитых бортовых антенн гидроакустических комплексов | 2023 |
|
RU2820807C1 |
| Способ определения класса объекта, обнаруженного шумопеленгаторной станцией | 2023 |
|
RU2835874C1 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| Способ определения координат морской шумящей цели | 2022 |
|
RU2798416C1 |
| Способ пассивного определения координат шумящего объекта | 2022 |
|
RU2798390C1 |



Изобретение относится к области гидроакустики и может быть использовано в станциях шумопеленгования, имеющих разнесенные в горизонтальной плоскости антенны, для решения задач пассивного определения координат шумящего в море объекта, а именно, пеленга, дистанции, глубины погружения и угла места шумящего морского объекта.
Техническим результатом является повышение точности измерения двумя горизонтально разнесенными антеннами пеленга, дистанции, глубины погружения и угла места шумящего морского объекта. Способ включает определение скорости распространения звука в воде, прием сигналов шумящих морских объектов на разнесенные в горизонтальной плоскости антенны, расположенные в пространстве с известными координатами. Предварительная обработка принятых сигналов включает ориентацию характеристик направленности антенн в направлении ожидаемого расположения источника излучения. Далее осуществляют определение взаимно корреляционной функции сигналов, принимаемых двумя антеннами, измерение временных задержек между приходом сигналов на эти антенны во взаимно корреляционной функции, определение автокорреляционных функций сигналов, принимаемых каждой из двух антенн, измерение временных задержек между приходом сигналов, распространяющихся по прямому и отраженному от поверхности моря путям, на каждую из двух антенн в автокорреляционных функциях. По измеренным значениям временных задержек в автокорреляционных и взаимно корреляционной функциях, скорости распространения звука в воде и известным координатам расположения антенн определяют пеленг, дистанцию, глубину погружения и угол места шумящего морского объекта. 4 ил.
Способ определения координат шумящих морских объектов, содержащий прием сигналов шумящих морских объектов на разнесенные в горизонтальной плоскости антенны, расположенные в пространстве с известными координатами, предварительную обработку принятых сигналов, включающую ориентацию характеристик направленности антенн в направлении ожидаемого расположения источника излучения, определение взаимно корреляционной функции сигналов, принимаемых двумя антеннами, измерение временных задержек между приходом сигналов на эти антенны во взаимно корреляционной функции, определение скорости распространения звука в воде, отличающийся тем, что дополнительно определяют автокорреляционные функции сигналов, принимаемых каждой из двух антенн, измеряют временные задержки между приходом сигналов, распространяющихся по прямому и отраженному от поверхности моря путям, на каждую из двух антенн в автокорреляционных функциях и по измеренным значениям временных задержек в автокорреляционных и взаимно корреляционной функциях, скорости распространения звука в воде и известным координатам расположения антенн определяют пеленг, дистанцию, глубину погружения и угол места шумящего морского объекта.
| US 4910719 A, 20.03.1990 | |||
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2507531C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАБЛЮДАЕМОГО ОБЪЕКТА ПО ГЛУБИНЕ В ВОДНОЙ СРЕДЕ | 2007 |
|
RU2343502C2 |
| Способ определения координат движущихся источников излучения пассивным гидролокатором | 2017 |
|
RU2658519C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ В РЕЖИМЕ ШУМОПЕЛЕНГОВАНИЯ | 1977 |
|
SU1840066A1 |
| DE 10153444 C1, 20.02.2003 | |||
| US 4480322 A, 30.10.1984. | |||
