Изобретение относится к опорной системе для пациента, содержащей опорную поверхность для пациента, несущую стойку для поддержания опорной поверхности и транспортную тележку для транспортировки опорной поверхности, причем на опорной поверхности расположены первые соединительные элементы, предназначенные для выборочного соединения со вторыми или третьими соединительными элементами на стойке и соответственно транспортной тележке.
Такая система известна, например, из ЕР 457246 В1. Для переноса опорной поверхности на транспортную тележку последнюю устанавливают в подходящее положение относительно несущей стойки. За счет перемещения вниз устройства регулирования высоты несущей стойки опорную поверхность сначала опускают, пока она не будет прилегать к транспортной тележке. В момент переноса первые соединительные элементы на опорной поверхности находятся в зацеплении одновременно со вторыми и третьими соединительными элементами на стойке и соответственно транспортной тележке.
Чтобы обеспечить безупречный и как можно менее принудительный (с меньшим усилием) перенос опорной поверхности с транспортной тележки на стойку и обратно, соединительные элементы перед переносом должны быть точно ориентированы по отношению друг к другу, так чтобы они могли как можно менее принудительным образом скользить друг в друге. Это предполагает, что головка стойки, которая, как правило, выполнена с возможностью регулирования для изменения положения пациента на операционном столе, имеет совершенно определенное положение относительно пола операционной, на которой стоит транспортная тележка. Также положение опорной поверхности для пациента на транспортной тележке может быть по каким-либо причинам не точно параллельным полу операционной. Поскольку эти отклонения при определенных обстоятельствах не видны или не могут быть быстро обнаружены, согласно изобретению предложено, что, по меньшей мере, на одном из соединительных элементов, расположенных со стороны несущей стойки, предусмотрен, по меньшей мере, один датчик для считывания (снятия) положения соединенного с опорной поверхностью первого соединительного элемента относительно соединительного элемента, расположенного со стороны несущей стойки, причем датчик действует тогда, когда опорная поверхность находится на транспортной тележке или когда последняя занимает предназначенное для переноса опорной поверхности на несущую стойку положение относительно нее. Целесообразно датчик соединен с управляющим устройством для управления сервоприводом головки стойки. Как только датчик зарегистрирует отклонение от нужной ориентации соединительных элементов, расположенных со стороны опорной поверхности, относительно соединительных элементов, расположенных со стороны несущей стойки, или соединительных элементов на транспортной тележке, управляющее устройство по соответствующему сигналу датчика вызовет перемещение или регулирование головки стойки до тех пор, пока соединительные элементы не будут расположены точно по одной линии друг с другом. Датчик может быть образован, например, отклоняющимся штифтом, который считывает один из контуров соединительных элементов, расположенных со стороны опорной поверхности или со стороны транспортной тележки.
Нижеследующее описание поясняет изобретение на примере его осуществления в сочетании с приложенными чертежами, которые изображают:
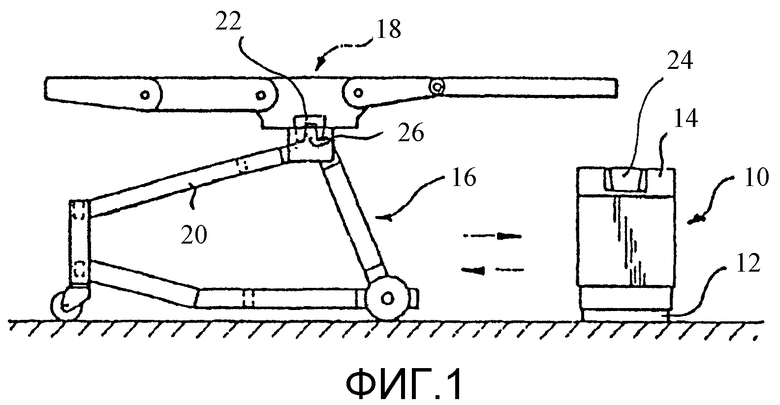
- фиг.1: схематичное представление опорной сиситемы для пациента, содержащей опорную поверхность для пациента, транспортную тележку для опорной поверхности и несущую стойку для опорной поверхности;
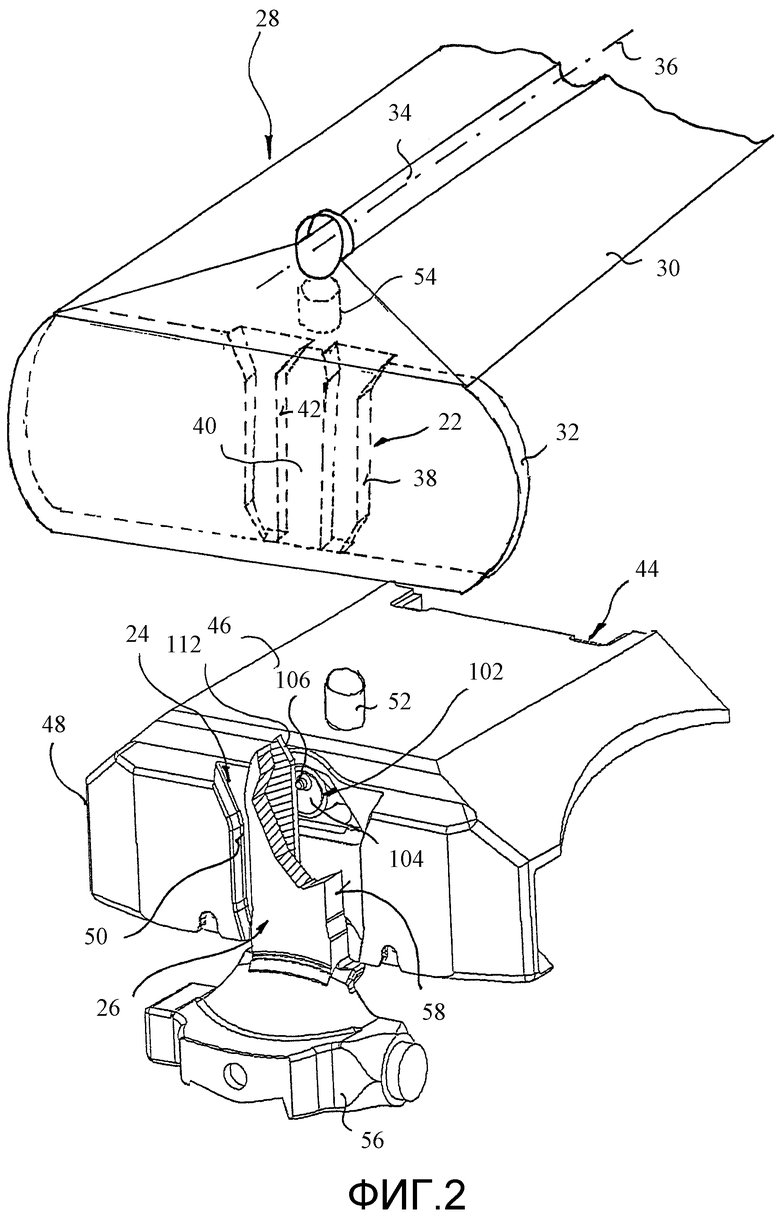
- фиг.2: частично схематичное представление трех взаимодействующих между собой соединительных элементов;
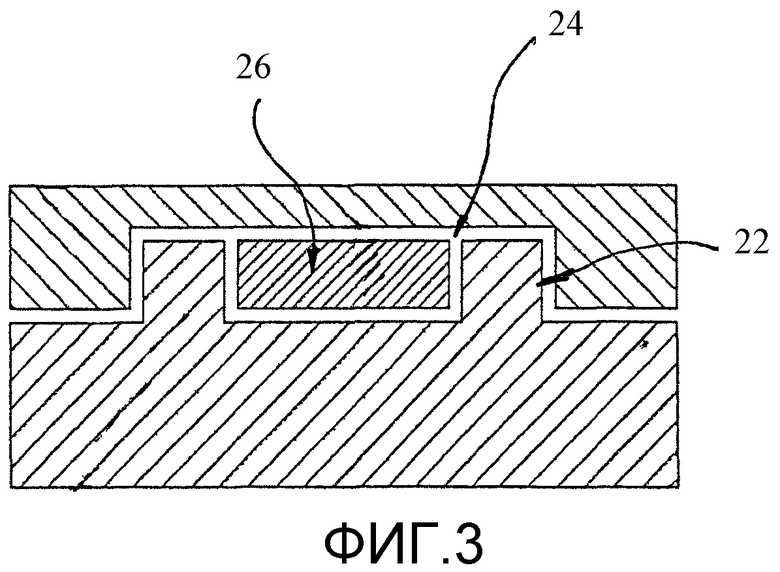
- фиг.3: схематичный разрез трех находящихся в одновременном зацеплении между собой соединительных элементов;
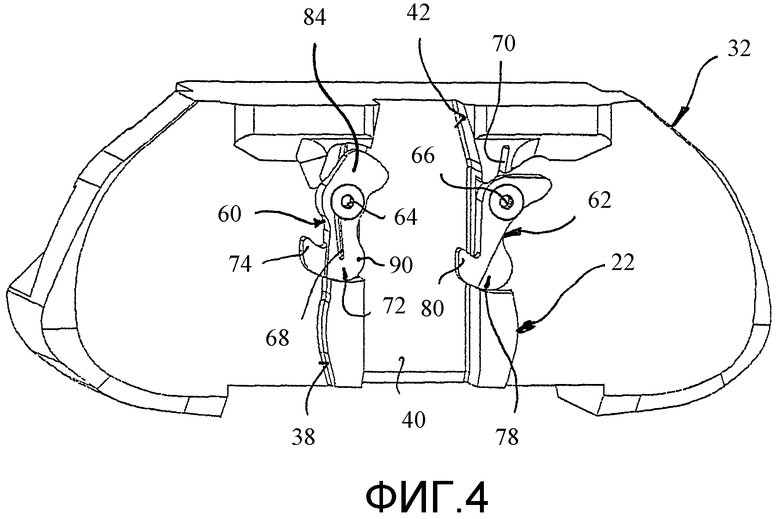
- фиг.4: частично схематичное представление первого соединительного элемента, расположенного на части, находящейся со стороны опорной поверхности;
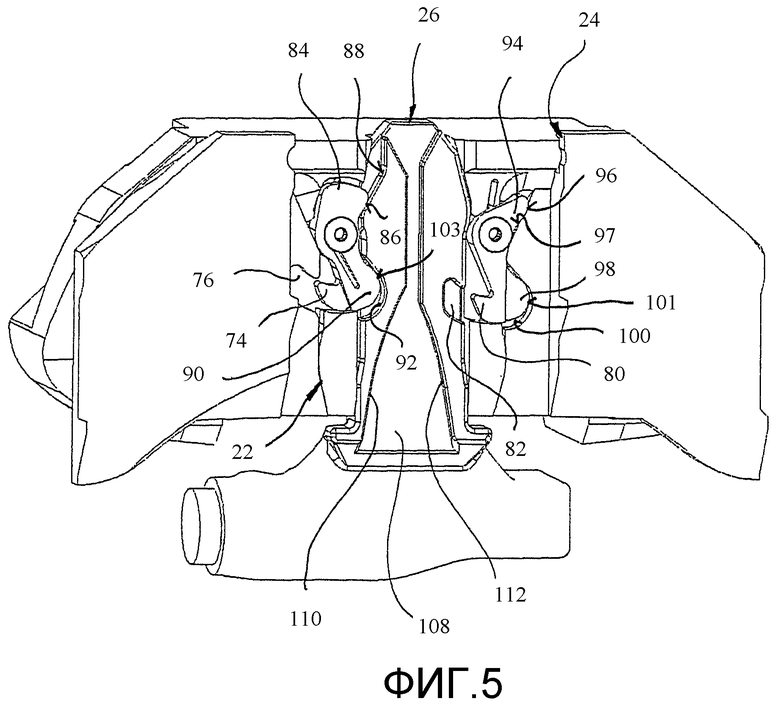
- фиг.5: схематичное представление трех находящихся в одновременном зацеплении между собой соединительных элементов;
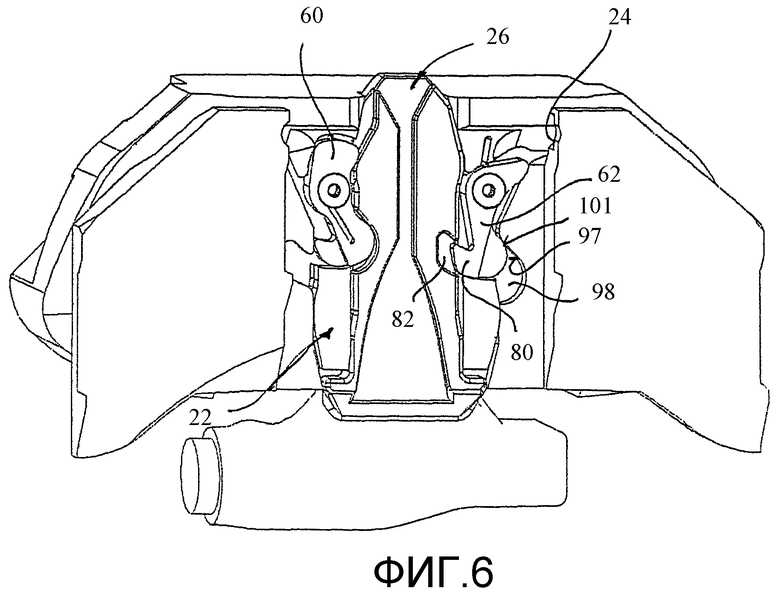
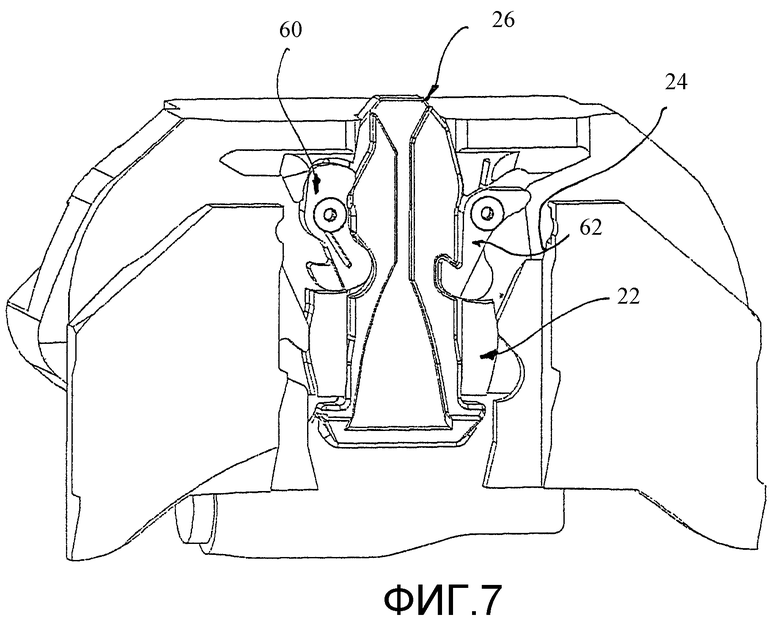
- фиг.6 и 7: соответствующее представление трех соединительных элементов при переносе опорной поверхности с несущей стойки на транспортную тележку;
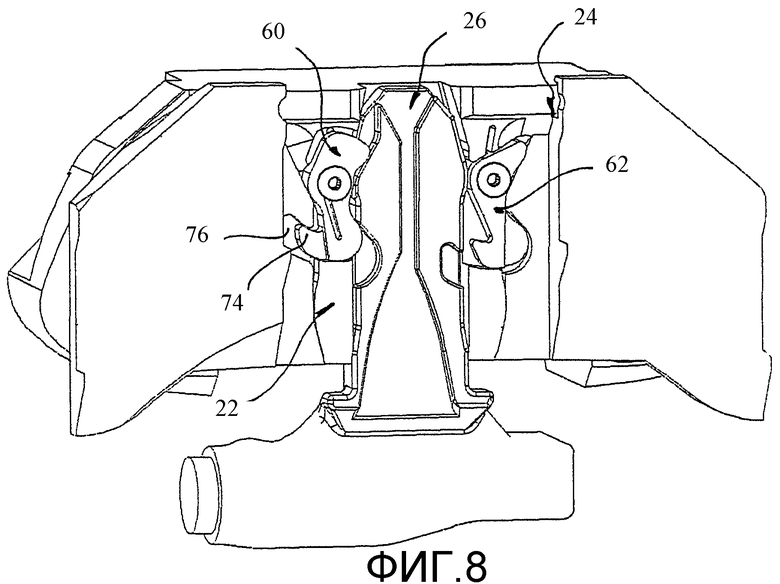
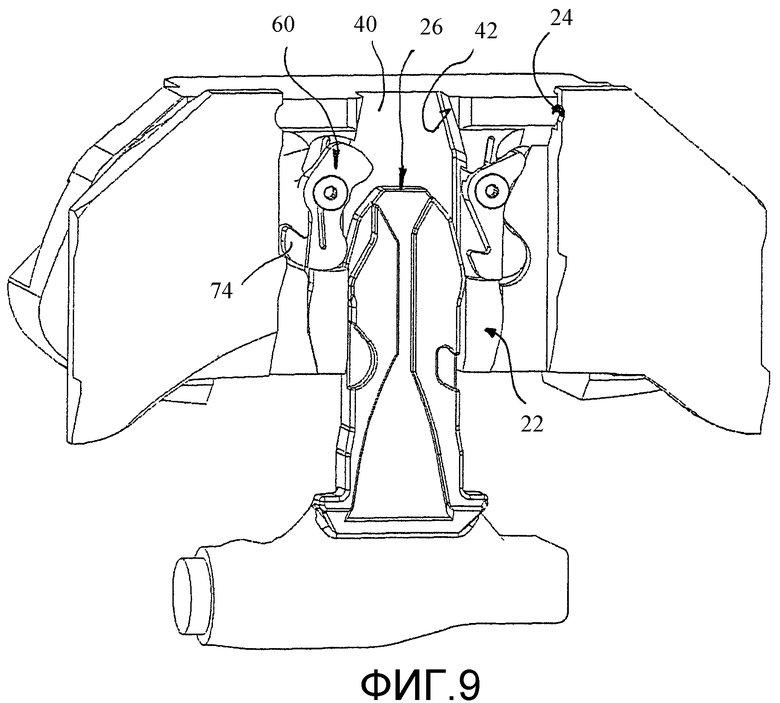
- фиг.8 и 9: соответствующие фиг.6 и 7 представления при переносе опорной поверхности с транспортной тележки на несущую стойку.
Схематично изображенная на фиг.1 опорная система для пациента содержит обозначенную, в целом, позицией 10 несущую стойку операционного стола с основанием 12 стойки и установленной на нем с возможностью регулирования по высоте головкой 14 стойки. Устройство регулирования по высоте не показано. Оно может быть выполнено любым традиционным образом. Как правило, - это гидравлическое или механическое подъемное устройство.
Слева рядом с несущей стойкой находится обозначенная, в целом, позицией 16 транспортная тележка, несущая опорную поверхность или столешницу 18 операционного стола. Транспортная тележка 16 состоит из двух боковых рамных частей 20, соединенных между собой поперечинами (не показаны), как это описано в ЕР 457246 В1. Транспортная тележка 16 может быть подведена к несущей стойке 10 так, что последняя будет находиться между боковыми рамными частями 20.
На продольных боковых краях опорной поверхности 18 расположены первые соединительные элементы 22, предназначенные для зацепления со вторыми соединительными элементами 24 на головке 14 стойки и соответственно с третьими соединительными элементами 26 на боковых рамных частях 20 транспортной тележки 16, чтобы соединять опорную поверхность 18 либо с несущей стойкой 10, либо с транспортной тележкой 16. Более точное выполнение соединительных элементов и принцип их действия более подробно описаны ниже.
На фиг.2 позицией 28 обозначена соединительная рама, содержащая среднюю плиту 30 и две отстоящие вниз на ее продольных концах боковины 32, из которых показана только одна. Средняя плита 30 имеет на своей верхней стороне опору 34 для соединения с собственно опорной поверхностью 18 для пациента, которая установлена на соединительной раме 28 с возможностью поворота вокруг проходящей поперек ее продольному направлению оси 36. Каждая из боковин 32 несет на своей внутренней стороне первый соединительный элемент 22. Он имеет форму широкой цапфы с внешним контуром 38 и шлицеобразный паз 40 с внутренним контуром 42.
Под соединительной рамой 28 находится изображенное лишь частично седло 44, являющееся частью головки 14 стойки. Аналогично соединительной раме 28 оно выполнено С-образным со средней перемычкой 46 и двумя боковыми частями 48, из которых показана только одна. Боковая часть 48 имеет на своей внешней стороне образующий второй соединительный элемент 24 приемный карман для размещения первого соединительного элемента 22, причем приемный карман имеет внутренний контур 50, подогнанный к внешнему контуру 38 первого соединительного элемента 22. Вблизи своей соответствующей боковой части 48 средняя перемычка 46 несет на своей верхней стороне центрирующую цапфу 52, предназначенную для вхождения в ответное отверстие 54, выполненное на нижней стороне средней плиты 30 соединительной рамы 28.
На фиг.2 в приемный карман второго соединительного элемента 24 входит образующая третий соединительный элемент 26 направляющая цапфа, которая закреплена посредством цоколя 56 на транспортной тележке 16 и предназначена для вхождения в паз 40 соответствующего первого соединительного элемента 22. Она имеет внешний контур 58, соответствующий внутреннему контуру 42 первого соединительного элемента 22.
Когда все три соединительных элемента 22, 24, 26 при переносе опорной поверхности с транспортной тележки на несущую стойку или наоборот находятся в одновременном зацеплении между собой, они вставлены друг в друга, как это схематично видно на фиг.3. Образующая третий соединительный элемент 26 цапфа расположена в пазу 40 первого соединительного элемента 22, который, в свою очередь, входит в образующий второй соединительный элемент 24 приемный карман, так что все три соединительных элемента находятся в одной плоскости. За счет этого возникает очень плоская поперек продольного направления опорной поверхности 18 конструкция.
Другие преимущества этого расположения содержатся в нижеследующем описании блокировочного механизма, с помощью которого опорную поверхность 18 выборочно соединяют либо с головкой 14 стойки, либо с транспортной тележкой 16.
На фиг.4 изображен схематичный вид сверху на внутреннюю сторону боковины 32 соединительной рамы 28. Также виден первый соединительный элемент 22, на котором с возможностью перемещения (регулировки) установлены два блокировочных элемента 60, 62. Блокировочные элементы 60, 62 выполнены в виде двуплечих рычагов, установленных с возможностью поворота вокруг осей 64, 66 и находящихся под действием предварительного напряжения по часовой стрелке посредством торсионных пружин 68, 70. Блокировочный элемент 60 предназначен для блокировки опорной поверхности 18 с головкой 14 стойки. Для этого плечо 72 рычага снабжено крюкообразным продолжением 74, которое предназначено для вхождения в паз 76 на внутреннем контуре 50 второго соединительного элемента 24 (фиг.5). Блокировочный элемент 62 предназначен для блокировки опорной поверхности 18 с транспортной тележкой 16. Для этого плечо 78 рычага блокировочного элемента 62 снабжено крюкообразным продолжением 80, которое предназначено для вхождения в паз 82 на внешнем контуре 58 цапфообразного третьего соединительного элемента 26 (фиг.5).
С помощью фиг.5-7 следует описать принцип действия блокировочных элементов при переносе опорной поверхности 18 со стойки 10 на транспортную тележку 16.
На фиг.5 три соединительных элемента 22, 24, 26 изображены в полном зацеплении между собой. В этом состоянии оба блокировочных элемента 60, 62 повернуты в свое деблокирующее положение. У блокировочного элемента 60 это происходит за счет того, что противоположное плечу 72 плечо 84 рычага управляющей кромкой 86 скользит по выполненному на третьем соединительном элементе 26 управляющему кулачку 88, поворачиваясь при этом против часовой стрелки, причем противоположный крюкообразному продолжению 74 первого блокировочного элемента 60 конец 90 первого плеча 72 рычага утапливается в полукруглый паз 92 во внешнем контуре третьего соединительного элемента 26 (фиг.5). Таким же образом второй блокировочный элемент 62 поворачивается против часовой стрелки за счет того, что противоположное плечу 78 плечо 94 рычага скользит управляющей кромкой 96 по выполненному на втором соединительном элементе 24 управляющему кулачку 97, причем противоположный крюкообразному продолжению 80 конец 98 первого плеча 78 рычага также утапливается в полукруглый паз 100 во втором соединительном элементе 24 (фиг.5).
При переносе опорной поверхности 18 на транспортную тележку 16 головку 14 несущей стойки 10 опускают из показанного на фиг.5 положения, как это видно на фиг.6 и 7. На фиг.6 показано, что с началом движения вниз головки 14 стойки и тем самым второго соединительного элемента 24 правый блокировочный элемент 62 под действием скользящего по управляющей кромке 101 плеча 98 рычага управляющего кулачка 97 второго соединительного элемента 24 поворачивается по часовой стрелке, так что крюкообразное продолжение 80 входит в паз 82. Уже в показанном на фиг.6 положении опорную поверхность 18 нельзя приподнять от транспортной тележки 16. При дальнейшем опускании головки 14 стойки, как показано на фиг.7, крюкообразное продолжение 80 второго блокировочного элемента 62 полностью входит в паз 82 в третьем соединительном элементе 26, так что опорная поверхность 18 прочно блокирована на транспортной тележке 16. В этом положении крюкообразное продолжение 80 удерживается за счет действия торсионной пружины 70. Наоборот, при подъеме головки 14 стойки из показанного на фиг.7 положения блокировочный элемент 62 повернулся бы против часовой стрелки, устраняя блокировку между первым и третьим соединительными элементами.
На фиг.8 и 9 изображен процесс блокировки при переносе опорной поверхности 18 с транспортной тележки 16 на несущую стойку 10. В этом случае, исходя из показанного на фиг.5 положения, головку 14 стойки приподнимают, в результате чего третий соединительный элемент 26 выскальзывает вниз из паза 40 первого соединительного элемента 22. Одновременно первый блокировочный элемент 60 посредством скользящего по управляющей кромке 103 на конце 90 рычага управляющего кулачка 88 принудительно поворачивается на третьем соединительном элементе 26 по часовой стрелке, в результате чего крюкообразное продолжение 74 первого блокировочного элемента 60 входит в паз 76 во втором соединительном элементе 24, расположенном со стороны стойки (фиг.8). При вытягивании третьего соединительного элемента из первого соединительного элемента опорная поверхность 18 прочно блокирована с головкой 14 стойки (фиг.9). Наоборот, при вводе третьего соединительного элемента 26 в паз 40 первого соединительного элемента 22 блокировочный элемент 60 поворачивается против часовой стрелки, в результате чего устраняется блокировка между вторым и первым соединительными элементами. Предшествующее описание показывает, что оба блокировочных элемента 60, 62 во время процессов соединения поворачиваются принудительным образом, что обеспечивает надежную блокировку между опорной поверхностью и головкой стойки, с одной стороны, и опорной поверхностью и транспортной тележкой 16, с другой стороны.
Видно далее, что исходя из показанного на фиг.5 положения, в котором оба блокировочных элемента 60, 62 повернуты в свое деблокирующее положение, при подъеме опорной поверхности относительно головки стойки и транспортной тележки оба блокировочных элемента повернулись бы по часовой стрелке и тем самым блокировались бы. Это надежно препятствует подъему опорной поверхности 18 из показанного на фиг.5 положения.
Для достижения как можно более свободного от трения переноса опорной поверхности со стойки на транспортную тележку и наоборот соединительные элементы 22, 24, 26 должны находиться точно на одной линии. Если они перекошены по отношению друг к другу, то может возникнуть нарушение функционирования. Во избежание этого на седле 44 внутри приемного кармана второго соединительного элемента 24 расположен датчик 102, который считывает положение третьего соединительного элемента 26 относительно второго соединительного элемента 24. Датчик состоит из установленного с возможностью вращения диска 104, который соединен, например, с отводом потенциометра и на внешней стороне которого с эксцентриситетом расположен измерительный штифт 106. Этот измерительный штифт 106 входит в паз 108, выполненный на широкой стороне третьего соединительного элемента 26 и ограниченный двумя управляющими кромками 110, 112. Если в процессе переноса транспортная тележка 16 и головка 14 стойки наклонены по отношению друг к другу, так что соединительные элементы 24, 26 расположены не на одной линии друг с другом в нужном виде, то измерительный штифт 106 упирается в одну из управляющих кромок 110, 112. За счет этого поворачивается диск 104. Этот поворот регистрируется, например, подключенным потенциометром и может быть преобразован в управляющий сигнал, подаваемый к управляющему устройству головки 14 стойки. Благодаря этому головка 14 стойки может быть отрегулирована так, что второй и третий соединительные элементы выравниваются по отношению друг к другу для обеспечения получаемого без трения соединения.
Преобразование отклонения измерительного штифта 106 в управляющий сигнал может происходить, конечно, и иным подходящим образом. Точно так же датчик может быть установлен с возможностью считывания контура первого соединительного элемента 22, расположенного со стороны опорной поверхности, поскольку, в первую очередь, важной является ориентация (выравнивание) первых соединительных элементов 22 относительно расположенных со стороны стойки вторых соединительных элементов 24.
Изобретение относится к медицинской технике. Опорной система для пациента содержит опорную поверхность для пациента, несущую стойку для поддержания опорной поверхности и транспортную тележку для транспортировки опорной поверхности. На опорной поверхности расположены первые соединительные элементы для выборочного соединения со вторыми или третьими соединительными элементами на несущей стойке и соответственно транспортной тележке. По меньшей мере, на одном из соединительных элементов со стороны несущей стойки, предусмотрен, по меньшей мере, один датчик для считывания положения соединенного с опорной поверхностью первого соединительного элемента. Датчик действует тогда, когда опорная поверхность находится на транспортной тележке и последняя занимает предназначенное для переноса опорной поверхности на несущую стойку положение относительно нее. Опорная система обеспечивает перенос опорной поверхности с транспортной тележки на стойку и обратно с меньшим усилием. 2 з.п. ф-лы, 9 ил.
1. Опорная система для пациента, содержащая опорную поверхность (18) для пациента, несущую стойку (10) для поддержания опорной поверхности (18) и транспортную тележку (16) для транспортировки опорной поверхности (18), причем на опорной поверхности (18) расположены первые соединительные элементы (22), предназначенные для выборочного соединения со вторыми или третьими соединительными элементами (24, 26) на несущей стойке (10) и соответственно транспортной тележке (16), отличающаяся тем, что, по меньшей мере, на одном из соединительных элементов (24), расположенных со стороны несущей стойки, предусмотрен, по меньшей мере, один датчик (102) для считывания положения соединенного с опорной поверхностью (18) первого соединительного элемента (22) относительно соединительного элемента (24), расположенного со стороны стойки, причем датчик (102) действует тогда, когда опорная поверхность (18) находится на транспортной тележке (16) и последняя занимает предназначенное для переноса опорной поверхности (18) на несущую стойку (10) положение относительно нее.
2. Система по п.1, отличающаяся тем, что соединительный элемент (24), расположенный со стороны стойки, расположен на регулируемой посредством, по меньшей мере, одного сервопривода головке (14) стойки, при этом датчик (102) соединен с управляющим устройством для управления сервоприводом головки (14) стойки.
3. Система по п.1 или 2, отличающаяся тем, что датчик образован отклоняющимся штифтом (106) для считывания одного из контуров соединительных элементов (22, 26), расположенных со стороны опорной поверхности или со стороны транспортной тележки.
| ТРАВМАТОЛОГИЧЕСКИЙ СТОЛ-НОСИЛКИ | 2000 |
|
RU2212873C2 |
| Стол перевязочный | 1982 |
|
SU1118361A1 |
| Опорный элемент | 1986 |
|
SU1531975A1 |
| US 3886606 A, 03.06.1975. | |||

