Изобретение относится к устройству для перевода рельсовых, независимых друг от друга транспортных тел от направляющего участка первой рельсовой нитки к направляющему участку второй рельсовой нитки, расположенной под углом к первой рельсовой нитке.
В более ранней заявке Швейцарии N 1996 1818/96 раскрыто устройство для доставки печатной продукции к позициям обработки. Оно содержит рельсовую систему, по которой перемещаются независимые друг от друга, оснащенные зажимами тележки для транспортировки печатной продукции. Основной транспортный тракт рельсовой системы соединен посредством управляемых стрелок с ведущими к позициям обработки подающими трактами. К подающим трактам примыкают возвратные тракты, которые, в свою очередь, посредством стрелок соединены с основным транспортным трактом для возврата на него зажимов. В устройствах этого рода с независимыми друг от друга тележками, установленными с возможностью свободного движения вдоль больших отрезков рельсовой системы, расстояние между следующими друг за другом тележками может сильно варьироваться. Так, возможно, что следующие друг за другом тележки будут упираться друг в друга. Это, в частности у ответвлений рельсовой системы и при схождении двух ниток рельсовой системы в одну, может вызвать проблемы. В частности, перевод стрелочных остряков после прохождения одной тележки можно гарантировать только в том случае, если следующая тележка начнет двигаться лишь по истечении определенного времени или после прохождения определенного пути.
Аналогичные проблемы возникают при схождении двух ниток рельсовой системы, когда там скапливаются прибывающие по обеим ниткам тележки не с определенной разницей по времени. Подобные устройства требуют значительных затрат на сенсорные, управляющие, шлюзовые и тактовые устройства для того, чтобы гарантировать бесперебойную работу.
Задачей настоящего изобретения является создание устройства для перевода рельсовых, независимых друг от друга транспортных тел от направляющего участка первой рельсовой нитки к направляющему участку второй рельсовой нитки, расположенной под углом к первой рельсовой нитке, которое при высокой производительности обработки обеспечивает перевод поступающих по первой рельсовой нитке транспортных тел, даже если они следуют друг за другом с очень малым промежутком между собой или даже упираются друг в друга.
Эта задача решается посредством устройства, имеющего признаки пункта 1-17 формулы изобретения. Решение согласно изобретению позволяет отказаться от внешней, если смотреть в радиальном направлении, направляющей для несущих тел в переходной зоне от направляющего участка первой рельсовой нитки к направляющему участку второй рельсовой нитки. При поворотах на стрелках можно, следовательно, отказаться от стрелочных остряков, что устраняет все проблемы, связанные с переводом стрелочных остряков. Кроме того, транспортные тела активно перемещаются в переходной зоне, они имеют, таким образом, на повороте точно определенную скорость и заходят с ней на вторую рельсовую нитку. Это создает предпочтительные предпосылки для дальнейшей обработки транспортных тел вниз по ходу движения.
Соединительные средства для присоединения транспортных тел к транспортирующему элементу переводного устройства могут быть расположены на самих транспортных телах. Предпочтительно однако, чтобы соединительные средства, как указано в п.3 формулы, взаимодействовали с переводным устройством. Это обеспечивает предельно простую форму выполнения транспортных тел.
Особенно предпочтительная форма выполнения устройства согласно изобретению приведена в п. 4 формулы. Если переводное устройство и соединительные средства образуют зажимное устройство для транспортных тел, то в переходной зоне можно частично или даже полностью отказаться от направляющей для транспортных тел со стороны рельсов.
Особенно предпочтительная форма выполнения устройства согласно изобретению приведена в п.5 формулы. Оно обеспечивает предельно простое выполнение транспортных тел и соединительных средств.
Особенно простая по конструкции и принципу действия форма выполнения устройства согласно изобретению приведена в п.6 формулы.
Другая особенно предпочтительная форма выполнения устройства согласно изобретению приведена в п.7 формулы. Траектория движения транспортных тел в переходной зоне, имеющая форму кругового сегмента, обеспечивает выполнение опорного элемента в форме кругового диска или колеса.
Другая предпочтительная форма выполнения устройства согласно изобретению по п.8 формулы обеспечивает выполнение устройства с прямолинейным отрезком. Если предусмотрены поводки, то транспортные тела занимают в зоне устройства определенное взаимное положение, что, в частности, дает преимущества при схождении двух ниток в одну.
С помощью другой предпочтительной формы выполнения устройства согласно изобретению по п. 9 формулы можно обрабатывать независимые друг от друга транспортные тела в нужный момент времени. За счет этого, в частности при схождении двух ниток, можно предотвратить столкновения поступающих по обеим ниткам транспортных тел.
Особенно предпочтительная форма выполнения устройства согласно изобретению для подачи поступающих по одной нитке транспортных тел к двум ниткам приведена в п.10 формулы.
Особенно предпочтительная форма выполнения устройства согласно изобретению для перевода поступающих по двум ниткам транспортных тел на одну нитку приведена в п.11 формулы.
У выполненного по п.12 формулы устройства столкновение транспортных тел предотвращено крайне простым образом.
Особенно экономично реализуемая форма выполнения устройства согласно изобретению, приведена в п.13 формулы. Она ребует небольшого числа различных деталей.
Особенно предпочтительная форма выполнения устройства, согласно изобретению приведена в п. 14 формулы. Внутренние бегунки могут быть выполнены особенно маленькими. Направляющий элемент обеспечивает оптимальное вхождение транспортных тел на направляющий участок рельсовой нитки, лежащей вниз по ходу движения.
Особенно предпочтительная форма выполнения устройства согласно изобретению по п.15 формулы обеспечивает индивидуальную обработку плоских изделий, в частности печатной продукции. Поступающие от различных источников изделия могут быть сведены для их последующей обработки, а поступающие по одной нитке изделия могут быть разделены для их последующей обработки.
Еще одна особенно предпочтительная форма выполнения устройства по п.16 позволяет подготовить изделия к потребностям последующих позиций обработки.
Особенно предпочтительная форма выполнения транспортных тел согласно изобретению по п. 17 формулы обеспечивает простое выполнение однотактных блоков и оптимальное взаимодействие между ними и транспортными телами.
Ниже изобретение описывается более подробно с помощью примеров выполнения, представленных на чертежах, где изображено:
на фиг. 1 - вид сверху устройства согласно изобретению с расположенными наподобие разветвления рельсовыми нитками;
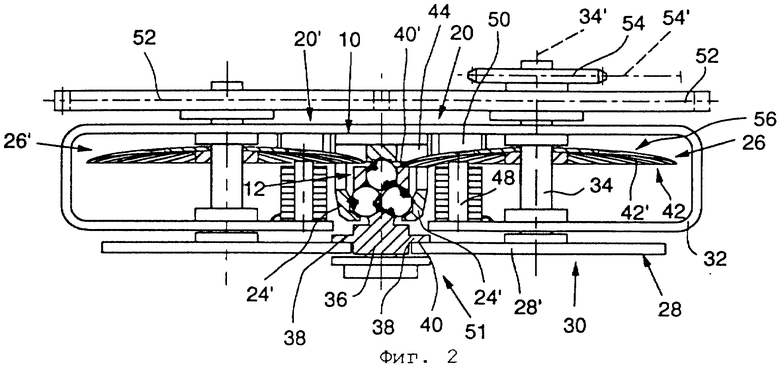
фиг. 2 - показанное на фиг. 1 устройство в разрезе по линии II-II на фиг. 1;
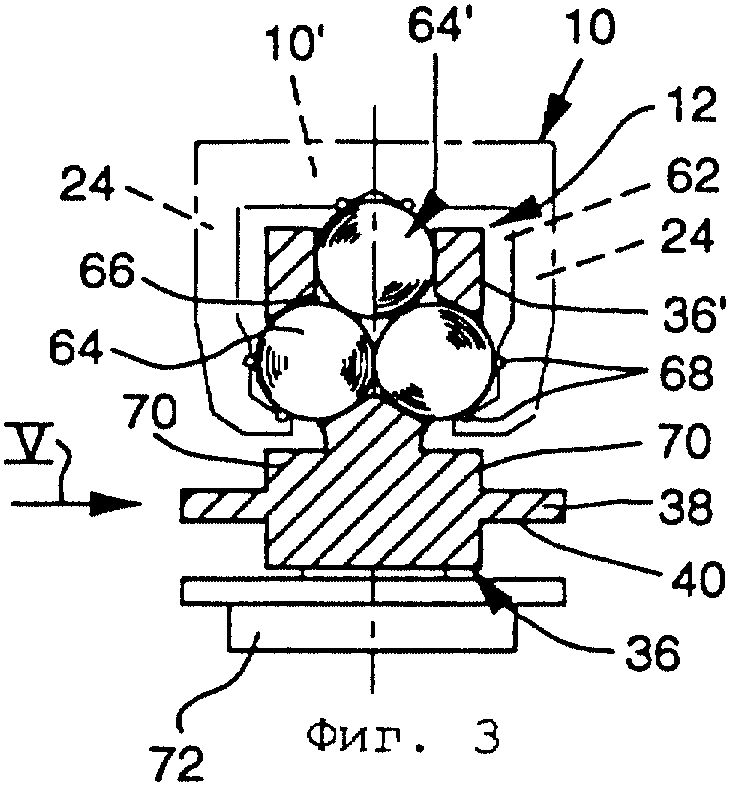
фиг. 3 - перемещающееся по рельсу транспортное тело в разрезе по линии III-III на фиг. 5;
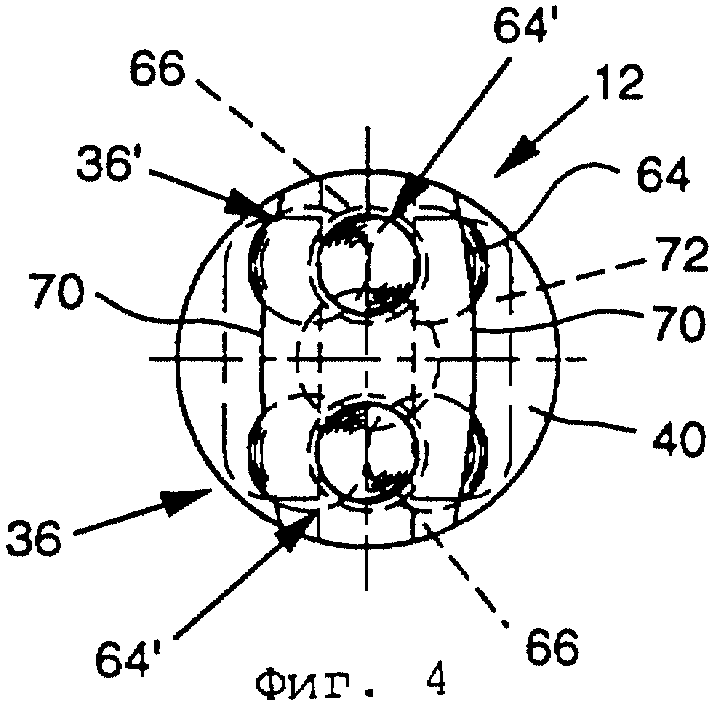
фиг. 4 - транспортное тело по фиг. 3, вид сверху;
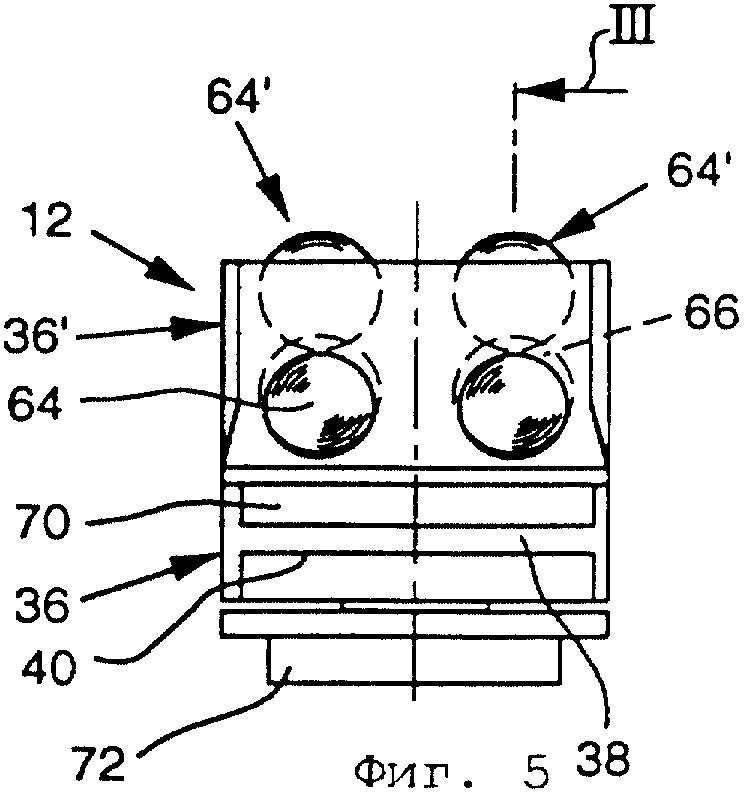
фиг. 5 - показанное на фиг. 3 и 4 транспортное тело, вид сбоку по стрелке V на фиг. 3;
фиг. 6 - часть показанного на фиг. 1 и 2 устройства в разрезе по линии VI на фиг. 1;
фиг. 7 - в соответствующем фиг. 2 изображении часть показанной на фиг. 1 и 2 формы выполнения устройства с дополнением для вращения расположенных на транспортных телах несущих элементов;
фиг. 8 - вид сверху на показанную на фиг. 7 часть устройства;
фиг. 9 - вид сверху на форму выполнения устройства согласно изобретению при сведении двух ниток в одну ветку;
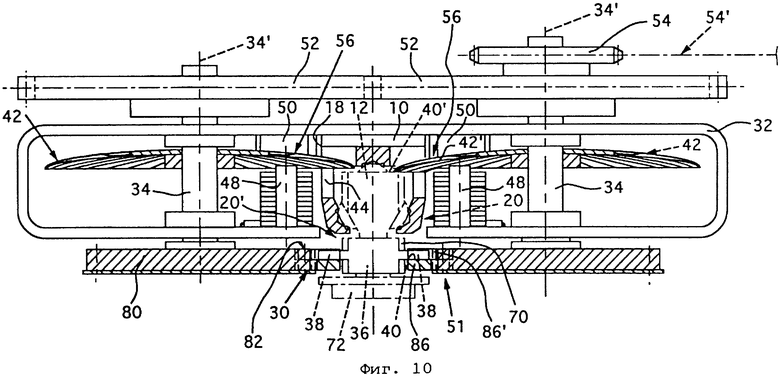
фиг. 10 - показанное на фиг. 9 устройство в разрезе по линии X-X на фиг. 9;
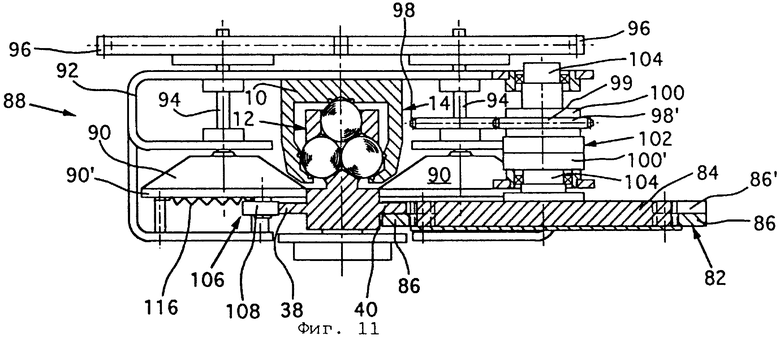
фиг. 11 - в разрезе по линии XI-XI на фиг. 9 показанное на ней устройства с однотактным блоком;
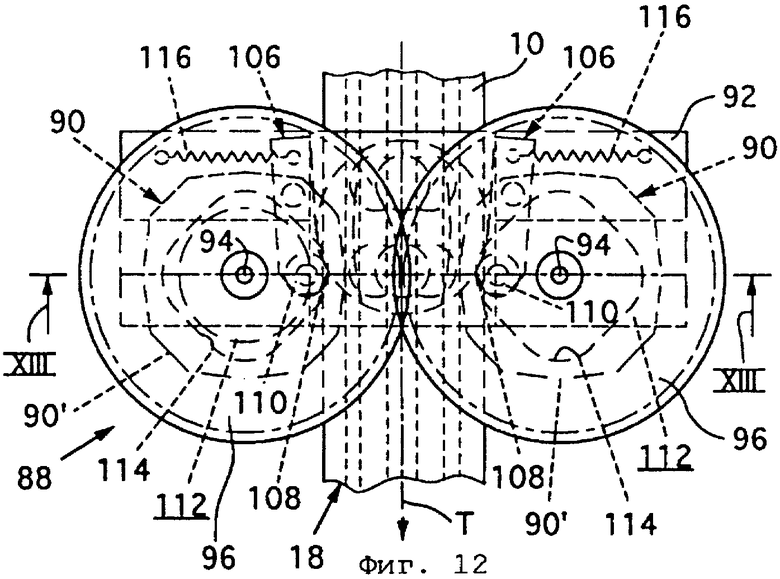
фиг. 12 - вид сверху на показанный на фиг. 9 и 11 однотактный блок в положении удержания транспортных элементов;
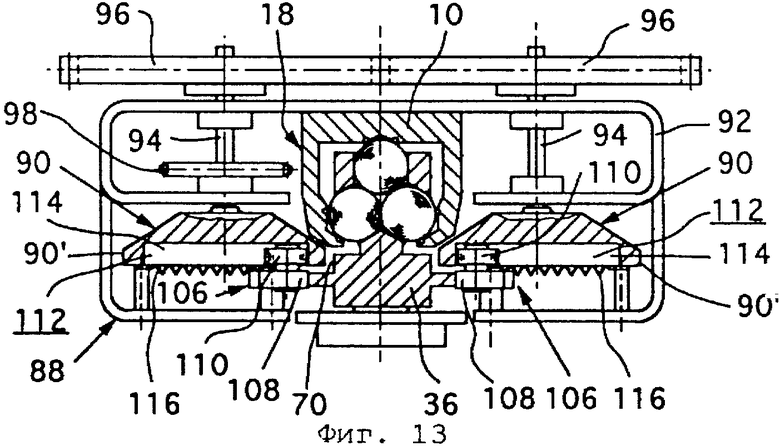
фиг. 13 - в разрезе по линии XIII-XIII на фиг. 12 однотактный блок в положении удержания;
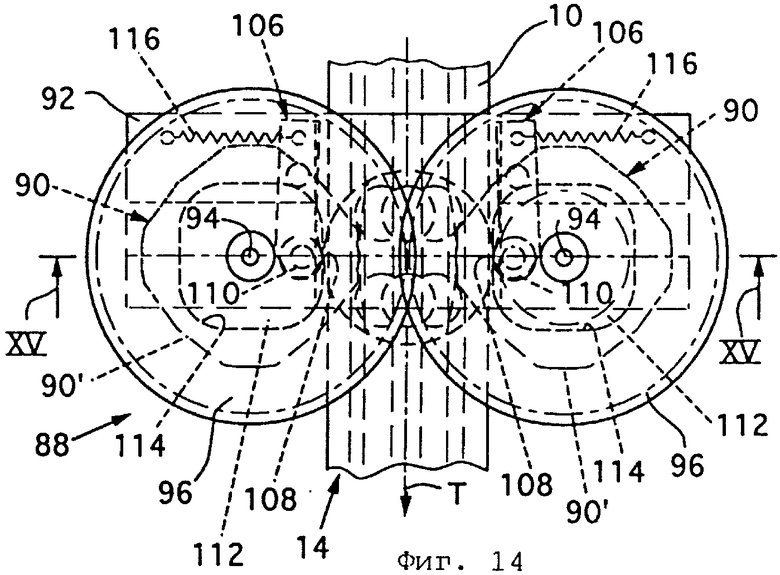
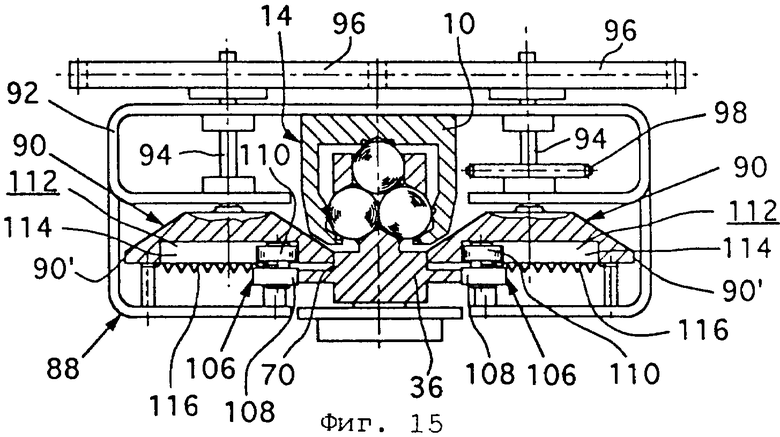
фиг. 14 - вид сверху на показанный на фиг. 12 однотактный блок в положении отпускания и приводном положении; и
фиг. 15 - в разрезе по линии XV-XV на фиг. 14 однотактный блок в положении отпускания и приводном положении.
Изображенное на фиг. 1 и 2 устройство содержит рельсовую систему с C-образными в сечении рельсами 10, в которых свободно перемещаются независимые друг от друга, выполненные в виде внутренних бегунков транспортные тела 12. К первой рельсовой нитке 14 примыкают, если смотреть в направлении Т транспортировки тел 12, вторая 16 и третья 18 рельсовые нитки. Вторая 16 и третья 18 рельсовые нитки расположены симметрично первой рельсовой нитке 14 и образуют с ней угол соответственно α и α′, составляющий 135o. Этот угол может быть также больше или меньше. От направляющего участка 14' первой рельсовой нитки 14 до направляющего участка 16' второй рельсовой нитки 16 проходит первая переходная зона 20 с изгибом 22 в форме дуги окружности. Направляющие участки 14', 16' обеих рельсовых ниток 14, 16 примыкают к изгибу 22 в касательном направлении. Соответствующая вторая переходная зона 20' со встречным изгибом 22 проходит от первой рельсовой нитки 14 до третьей рельсовой нитки 18. Внешняя относительно изгиба 22 первой переходной зоны 20 боковая сторона 24 соответствующего второй рельсовой нитке рельса заканчивается у третьей рельсовой нитки 18. Таким же образом внешняя боковая сторона 24 рельса 10 третьей рельсовой нитки 18 заканчивается у второй рельсовой нитки 16. В обеих переходных зонах 20, 20' вторая 16 и третья 18 рельсовые нитки не оказывают, таким образом, радиально снаружи никакого направляющего действия на транспортные тела 12.
Радиально внутренние относительно соответствующего изгиба 22 боковые стороны 24 второй 16 и третьей 18 рельсовых ниток продолжаются в переходной зоне 20, 20', образуя направляющий элемент 24', и переходят в боковые стороны рельса 10 первой рельсовой нитки 14.
Относительно изгиба 22 первой переходной зоны 20 на ее внутренней стороне расположено первое переводное устройство 26 с приводимым во вращение в направлении Т транспортировки, выполненным в виде транспортирующего диска 28 транспортирующим элементом 30. Относительно средней плоскости первой рельсовой нитки 14 зеркально-симметрично первому переводному устройству 26 расположено второе переводное устройство 26', соответствующее второй переходной зоне 20'. Оба переводных устройства 26, 26' выполнены зеркально-симметрично.
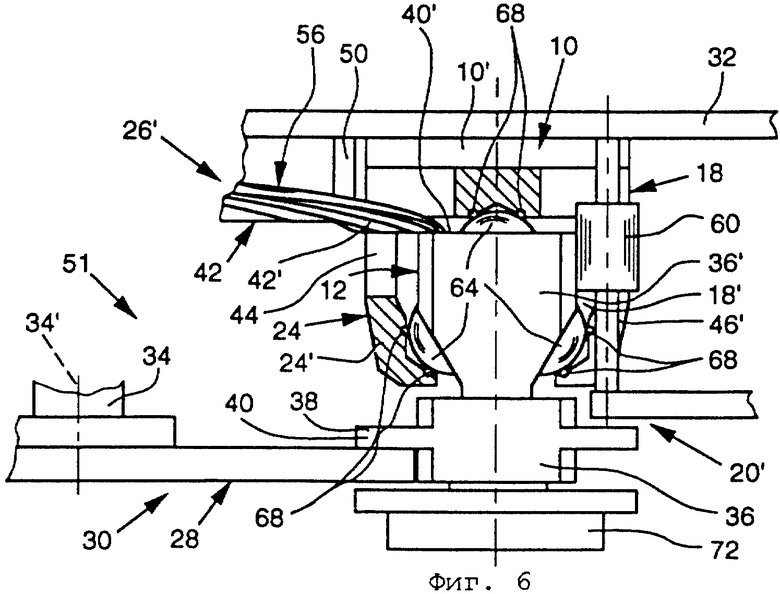
Транспортирующий диск 28 закреплен на нижнем конце установленного на станине 32 вала 34. Ось 34' вала 34 совпадает с центром кругообразного изгиба 22 соответствующей переходной зоны 20. Как видно из фиг. 2, транспортные тела 12 выступают своей частью 36 за рельс 10 и имеют на части 36, если смотреть в направлении Т транспортировки, яэычко-образные выступы 38. Нижняя, обращенная от рельса 10 поверхность этих выступов 38 образует заплечик 40, предназначенный для прилегания к верхней поверхности транспортирующего диска 28; она образует, таким образом, опорный элемент 28' для транспортных тел 12.
Над транспортирующим диском 28 на валу 34 закреплено пластинчатое колесо 42. Величина пластинчатого колеса 42 выбрана с возможностью его вхождения в выемку 44 рельсовой системы в переходной зоне 20 и примыкающие к ней концевые 46 и начальные 46' отрезки соответственно первой 14 и второй 16 рельсовых ниток для взаимодействия с верхними заплечиками 40' транспортных тел 12. Пластины 42' пластинчатого колеса 42 образованы проходящими в радиальном направлении прорезями в изогнутом в виде экрана, образующем пластинчатое колесо 42 диске из упругоэластичного ферромагнитного материала.
В начале каждой переходной зоны 20, 20', если смотреть в направлении Т транспортировки, на станине 32 закреплен электромагнит 48, который в возбужденном состоянии перемещает движущиеся мимо него пластины 42' из исходного положения по направлению к транспортному диску 28 в положение зажима. Непосредственно к электромагниту 48 вниз по ходу движения примыкает зажимная кулиса 50, которая также закреплена на станине 32 и предназначена для удержания перемещенных электромагнитом 48 в положение зажима пластин 42' в этом положении, пока они не достигнут начала направляющего участка 16', 18' соответственно второй 16 и третьей 18 рельсовых ниток. Зажимная кулиса 50 перемещает в положение зажима также остальные пластины 42', однако они не могут воздействовать на находящееся в соответственно другой переходной зоне 20 или 20' транспортное тело 12, поскольку оно находится вне зоны воздействия зажимных кулис 50 на пластины 42'. Пластинчатое колесо 42 с соответствующим электромагнитом 48 образует, таким образом, управляемый, взаимодействующий с опорным элементом 28' зажимной элемент 51 для переводимых транспортных тел 12.
На валу 34 каждого переводного устройства 26, 26' сидит зубчатое колесо 52. Эти одинаковые по величине зубчатые колеса 52 находятся в зацеплении между собой для привода обоих переводных устройств 26, 26' синхронно и во встречных направлениях вращения. На валу 34 первого переводного устройства 26 сидит далее звездочка 54 соединенной с приводным двигателем зубчатой передачи 54' для привода переводного устройства 26, 26'.
Пластинчатое колесо 42 и управляемый электромагнит 48 образуют, следовательно, соединительное средство 56 для связи подаваемого к данной рельсовой нитке 16 или 18 транспортного тела 12 с транспортирующим элементом 30 соответствующего данной рельсовой нитке 16, 18 переводного устройства 26 или 26'.
Перед переводными устройствами 26, 26', если смотреть в направлении Т транспортировки, установлен датчик 58. Он предназначен для распознавания поступающего транспортного тела 12 и при необходимости считывания размещенного на нем кода. Выходные сигналы датчика 58 поступают к устройству управления (на чертеже не показано), которое управляет электромагнитами 48 для подачи транспортного тела 12 к нужной второй 16 или третьей 18 рельсовой нитке.
В том месте, где взаимостыкуются радиально внешние боковые стороны 24 второй 16 и третьей 18 рельсовых ниток, с возможностью свободного вращения установлен направляющий ролик 60, который направляет радиально снаружи переведенные в одно из обоих направлений транспортные тела 12 при входе на соответствующую рельсовую нитку 16, 18.
Изображенное на фиг. 3-5 транспортное тело 12 имеет расположенную в образованном рельсом 10 ходовом канале 62 часть 36', в которой с возможностью свободного вращения установлены шарики 64 двух расположенных друг за другом, если смотреть в направлении Т транспортировки, троек 64'. Для размещения трех шариков 64 одной тройки 64' часть 36' транспортного тела 12 содержит Y-образно выполненную обойму 66, причем расположенные в коленах этой обоймы шарики 64 касаются друг друга и могут обкатываться один по другому. Каждый шарик 64 одной тройки 64' своей выступающей за транспортное тело 12 частью перемещается по расположенной на рельсе 10 парной дорожке 68 качения. Две парные дорожки 68 качения расположены каждая на конце каждой боковой стороны 24 рельса 10, а третья - на соединяющей обе боковые стороны 24 шейке 10' рельса. Конструкция рельса 10 и расположенной в ходовом канале 62 части 36' транспортного тела с тройками 64' шариков, а также их взаимодействие с рельсом 10 подробно описаны в европейской заявке N 0387318.
Выступающая из ходового канала 62, выполненная за одно целое с частью 36' часть 36 транспортного тела имеет с боков описанные выше выступы 38 с заплечиками 40. На обращенной к рельсу 10 и части 36' стороне выступов 38 на части 36 отформованы боковые выпуклые приводные поверхности 70, назначение и принцип действия которых описаны ниже.
На обращенном от части 36' торце части 36 на последней закреплен несущий элемент 72, на котором может быть размещен, например, зажим для транспортировки печатной продукции.
На фиг. 6 частично показано изображенное на фиг. 1 и 2 переводное устройство 26' при переводе транспортного тела 12 во второй переходной зоне 20', причем транспортное тело 32 вводится в направляющий участок 18' третьей рельсовой нитки 18. Транспортное тело 12 опирается своим заплечиком 40 на транспортирующий диск 28, а к заплечику 40' прилегают удерживаемые зажимной кулисой 50 в положении зажима пластины 42' пластинчатого колеса 42. В переходной зоне 20' шарики 64, обращенные к шейке 10' рельса 10 и к радиально внутренней, образующей направляющий элемент 24' боковой стороне 24, перемещаются по соответствующим парным дорожкам 68 качения, а радиально внешние шарики 64 лежат свободно и снова перемещаются только после вхождения на направляющий участок 18' третьей рельсовой нитки 18. Воздействующий на часть 36' направляющий ролик 60 способствует вхождению этих шариков 64 на соответствующую им парную дорожку 68 качения. Как видно из фиг. 6, пластины 42' отпускают транспортное тело 12 и отходят от зажимной кулисы 50, как только транспортное тело 12 начнет перемещаться на направляющем участке 18'.
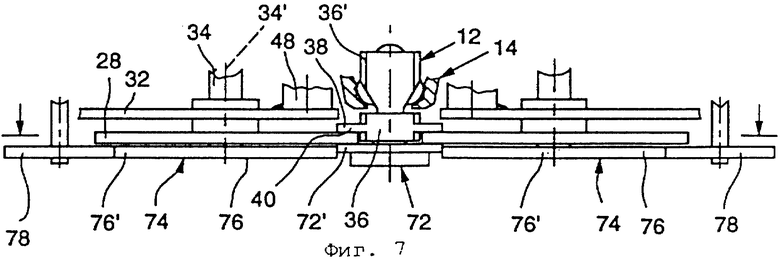
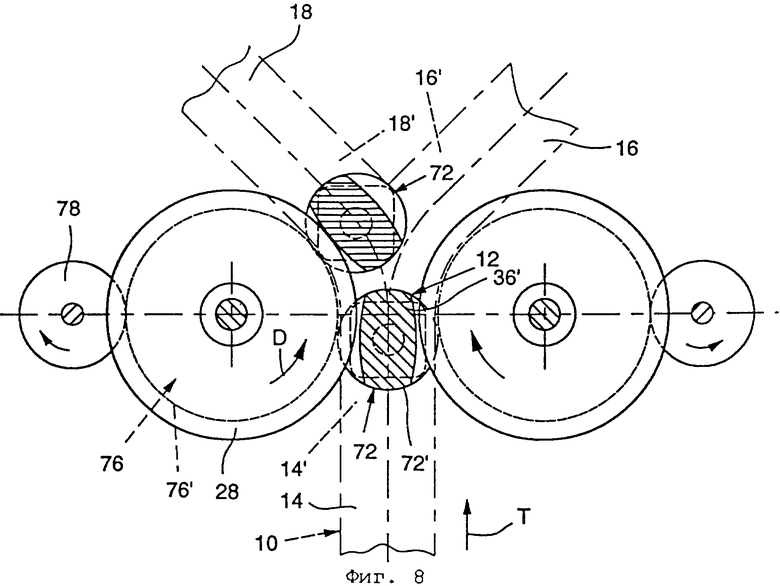
У изображенной на фиг. 7, 8 формы выполнения несущие элементы 72 установлены на транспортных телах 12 с возможностью вращения вокруг оси 34', а изображенные на фиг. 1, 2 и описанные выше переводные устройства 26, 26' содержат управляющие средства 74 для вращения несущего элемента 72. На обращенной от пластинчатого колеса 42 стороне транспортирующего диска 28 на торце вала 34 с возможностью свободного вращения установлено управляющее колесо 76, приводимое по стрелке D и тем самым в направлении Т транспортировки посредством воздействующего на его боковую поверхность 76', соединенного с приводом приводного колеса 78. Управляющее колесо 76 взаимодействует своей боковой поверхностью 76' с имеющей форму кругового цилиндра боковой поверхностью 72' несущего элемента 72. Если частота вращения управляющего колеса 76 соответствует частоте вращения транспортирующего диска 28 и пластинчатого колеса 42, то несущий элемент 72 сохраняет свое положение поворота относительно транспортного тела 12 в переходной зоне 20 или 20'. Если же частота вращения управляющего колеса 76 больше частоты вращения транспортирующего диска 28 и пластинчатого колеса 42, то несущий элемент 72 поворачивается навстречу изгибу 22 относительно транспортного тела 12. Меньшая по сравнению с частотой вращения транспортирующего диска 28 и пластинчатого колеса 42 частота вращения управляющего колеса 76 вызывает поворот несущего элемента 72 в направлении изгиба 22. В изображенном примере частоты вращения согласованы между собой таким образом, что несущий элемент 72 на изгибе 22 сохраняет ту ориентацию, которую он имел на первой рельсовой нитке 14 при вхождении в переходную зону 20'.
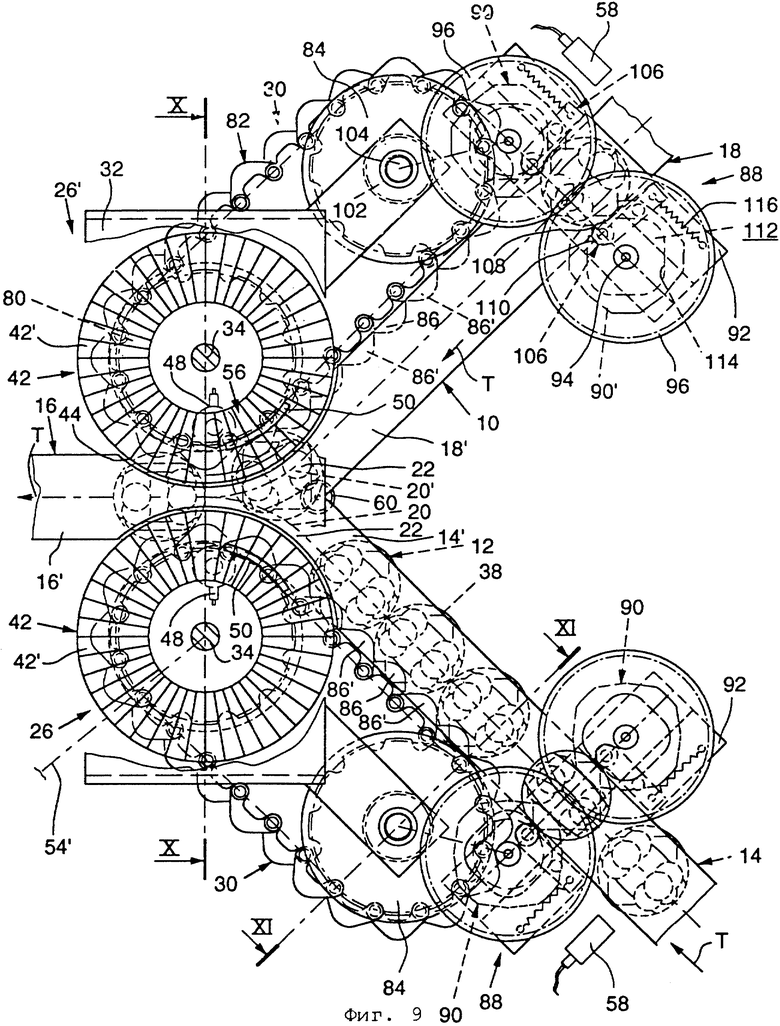
Изображенные на фиг. 9 и 10 переводные устройства 26, 26', в основном выполнены так же, как и переводные устройства, изображенные на фиг. 1 и 2. Детали изображенных на фиг. 9 и 10 переводных устройств 26, 26', выполненные одинаковыми и выполняющими те же функции, что и в изображенном на фиг. 1, 2 примере выполнения, обозначены теми же ссылочными позициями; здесь следует сослаться на соответствующие места описания.
Вместо транспортирующего диска 28 на валу 34 жестко сидит звездочка 80, по которой проходит образующая транспортирующий элемент 30 транспортирующая цепь 82, проходящая, в свою очередь, по направляющему колесу 84, которое расположено относительно направления Т транспортировки первой 14 и третьей 18 рельсовых ниток перед звездочкой 80 вверх по ходу движения и установлена с возможностью свободного вращения на станине 32.
Следующие друг за другом звенья транспортирующей цепи 82 расположены попеременно внизу и вверху, причем каждое нижнее звено образует опорное звено 86, которое в качестве опорного элемента 28' взаимодействует с заплечиками 40 транспортных тел 12. Соседние с опорным звеном 86 звенья образуют поводковые звенья 86', которые жестко зажимают между собой выступы 38 транспортных тел 12.
В данном случае транспортные тела 12, поступающие по первой 14 и третьей 18 рельсовым ниткам в направлении Т транспортировки, подаются переводными устройствами 26, 26' ко второй рельсовой нитке 16. Во избежание занятия транспортными телами 12 соответствующих друг другу опорных звеньев 86 обеих транспортирующих цепей 82 при их синхронном приведении в действие перед обоими направляющими колесами 84, если смотреть в направлении Т транспортировки, установлено по одному однотактному блоку 88. Поскольку однотактные блоки 88 приводятся встречно-одинаково, можно простым образом избежать столкновения двух транспортных тел 12 в переходных зонах 20, 20'. Первой 14 и третьей 18 рельсовым ниткам соответствует по одному установленному перед данным однотактным блоком 88 датчику 58, который распознает поступающее транспортное тело 12 и подает соответствующие сигналы к управляющему блоку (на чертеже не показан) для управления однотактными блоками 88 и магнитами 48, перемещающими пластины 42' пластинчатых колес 42 в положение зажима.
Зажимные кулисы 50 установлены непосредственно перед электромагнитами 48. Они перемещают каждую перемещающуюся мимо нее пластину 42' в положение зажима. При возбужденном электромагните 48 пластины 42' движутся снова назад в исходное положение, прежде чем они смогут воздействовать на транспортное тело 12, переводимое другим переводным устройством 26 или 26'.
Конструкция и принцип действия однотактных блоков 88 видны из фиг. 11-14. Каждый из однотактных блоков 88 содержит с обеих сторон от образующего соответствующую рельсовую нитку 14 или 18 рельса 10 приводное колесо 90 в форме усеченного конуса многоугольного контура. Приводные колеса 90 сидят на установленных на дополнительной станине 92 валах 94, которые, в свою очередь, кинематически связаны между собой посредством находящихся в зацеплении между собой зубчатых колес 96 одинакового диаметра. На одном из этих валов 94 жестко сидит звездочка 98, по которой проходит цепь 99, проходящая с другой стороны по сидящей на соединительном элементе 100 звездочке 98'. Соединительный элемент 100 является частью муфты 102, установленной на валу 104, на котором закреплено соответствующее направляющее колесо 84. Муфта 102 получает от управляющего устройства команды на соединение вала 94 для привода однотактного блока 88 с валом 104 и на их разъединение, а также на остановку однотактного блока 88 путем соединения соединительного элемента 100 с жестко установленным элементом 100'.
На дополнительной станине 92 с обеих сторон от рельса 10 с возможностью вращения установлено по одному двуплечему задерживающему рычагу 106. Оба задерживающих рычага 106, расположенных приблизительно параллельно рельсу 10, имеют на своем конце, лежащем в направлении Т транспортировки вниз по ходу движения, задерживающий выступ 108 и установленный с возможностью свободного вращения управляющий ролик 110, которые входят снизу в выемку 112 приводных колес 90; боковая поверхность выемки 112 образует управляющую кулису 114 для управляющих роликов 110. На обращенном от управляющего ролика 110 и задерживающего выступа 108 конце задерживающие рычаги 106 закреплены каждый на пружине 116, которые другим концом закреплены на дополнительной станине 92 для натяжения задерживающих рычагов 106 в задерживающем положении.
Как видно из фиг. 12 и 14, управляющая кулиса 114 имеет в основном многоугольно-круглую форму, причем в задерживающем положении управляющие ролики 110 расположены каждый в скругленной "угловой зоне" управляющей кулисы 114, как это показано на фиг. 12 и 13. Если оба приводных колеса 90 приводятся во встречном направлении и в направлении Т транспортировки соответственно на четверть оборота, то управляющие кулисы 114 поворачивают задерживающие рычаги 106 сначала против усилия пружин 116 в отпускающее положение, а к концу этого движения поворота - снова в задерживающее положение. Отпускающее положение задерживающих рычагов 106 и соответствующее движение поворота направляющих колес 84 показаны на фиг. 14 и 15.
Внешняя многоугольная цилиндрическая боковая поверхность 90' приводных колес 90 выполнена таким образом, что расстояние от нее до оси вращения вала 94 у "углов" управляющей кулисы 114 наименьшее, а в средней части управляющих кулис 114 между двумя "углами" - наибольшее. Когда задерживающие рычаги 106 находятся в задерживающем положении, а транспортное тело 12 прилегает своим выступом 38 к задерживающим выступам 108, приводные колеса 90 своей боковой поверхностью 90' также прилегают к приводным поверхностям 70 части 36 транспортных тел. Форма выпуклых приводных поверхностей 70 и форма также выпуклой боковой поверхности 90' приводных колес 90 согласованы между собой таким образом, что при вращении приводных колес 90 их боковые поверхности 90' обкатываются по приводным поверхностям 70 с ускорением транспортного тела 12 в направлении Т транспортировки. Этой цели служит увеличение расстояния боковой поверхности 90' до вала 94.
Прежде всего следует описать принцип действия устройства, изображенного на фиг. 1, 2 и далее на фиг. 9-15.
Поступающее по первой рельсовой нитке 14 в направлении Т транспортировки транспортное тело 12 распознается датчиком 58. Если это транспортное тело 12 необходимо направить к третьей рельсовой нитке 14, то возбуждают электромагнит 48, соответствующий, если смотреть в направлении Т транспортировки, расположенному слева второму переводному устройству 26'. За счет этого движущиеся мимо него пластины 42' приводятся в положение зажима, вследствие чего транспортное тело 12, упирающееся своим левым, если смотреть в направлении Т транспортировки, заплечиком 40 в непрерывно приводимый транспортирующий диск 28, зажимается между ним и пластинчатым колесом 42. Поскольку управление электромагнитами 48 переводных устройств 26, 26' происходит встречно-одинаково, удерживаемое вторым переводным устройством 26' транспортное тело 12 может беспрепятственно двигаться мимо первого переводного устройства 26. Удерживаемое вторым переводным устройством 26' транспортное тело 12 транспортируется через вторую переходную зону 20' и вводится в направляющий участок 18' третьей рельсовой нитки 18. Это изображено с помощью находящегося у направляющего ролика 60 другого транспортного тела 12. Как только транспортное тело 12 окажется на направляющем участке 18', соответствующие пластины 42' отпустят его, поскольку они не удерживаются больше зажимной кулисой в положении зажима и в конце концов отходят от нее.
Если поступающее транспортное тело 12 необходимо направить ко второй рельсовой нитке 16, то возбуждают электромагнит 48, соответствующий, расположенному справа, если смотреть в направлении Т транспортировки, переводному устройству 26, и одновременно снимают возбуждение с соответствующего второму переводному устройству 26' электромагнита 48, вследствие чего транспортное тело 12 зажимается между транспортирующим диском 28 и пластинчатым колесом 42 первого переводного устройства 26 и направляется через первую переходную зону 20 к направляющему участку 16' второй рельсовой нитки 16.
Поскольку транспортные тела 12 на соответственно радиально внутренней стороне присоединяются к соответствующему переводному устройству 26 или 26', транспортные тела 12 могут обрабатываться с произвольным расстоянием друг за другом. И это даже тогда, когда они прилегают друг к другу в зоне первой рельсовой нитки 14.
С помощью изображенной на фиг. 9-15 формы выполнения устройства согласно изобретению поступающие по двум рельсовым ниткам 14 и 18 транспортные тела 12 направляются к единственной второй рельсовой нитке 16. Поступающее по первой 14 или третьей 18 рельсовой нитке транспортное тело 12 распознается соответствующим датчиком 58. На основе сигналов датчиков 58 управляющее устройство решает, какой следует отпустить однотактный блок 88 для отпускания и ускорения транспортного тела 12. В изображенный на фиг. 9 момент времени соответствующий третьей рельсовой нитке однотактный блок 88 остановлен, в результате чего соответствующее транспортное тело 12 прилегает к находящемуся в задерживающем положении задерживающему рычагу 106 и не может попасть в зону действия приводимой в непрерывное движение транспортирующей цепи 82.
Соответствующий первой рельсовой нитке 14 однотактный блок 88 временно кинематически связан с направляющим колесом 84 и тем самым с соответствующей, также непрерывно приводимой транспортирующей цепью 82 и первым переводным устройством 26. Его задерживающие рычаги 106 были повернуты вследствие вращения приводных колес 90 в отпускающее положение, а находящееся между приводными колесами 90 транспортное тело 12 ускоряется в направлении Т транспортировки. Отпускание однотактного блока 88 синхронизировано с движением транспортирующей цепи 82, так что отпущенное и ускоренное транспортное тело 12 опирается между двумя поводковыми звеньями 86' на опорное звено 86. В изображенном примере четыре следующих друг за другом опорных звена 86 заняты тогда одним транспортным телом 12 каждое, а соответствующие опорные звенья 86 соответствующей третьей рельсовой нитке 18 транспортирующей цепи 82 свободны. Таким образом, с одной стороны, предотвращается обкатывание двух транспортных тел 12 друг по другу при схождении рельсовых ниток 14, 18, а, с другой стороны, происходит управление порядком подачи транспортных тел 12 ко второй рельсовой нитке 16.
Транспортные тела 12, направляемые транспортирующей цепью 82 в зону действия пластинчатых колес 42, зажимаются там между соответствующим опорным звеном 86 и приведенными с помощью нажимных кулис 50 в положение зажима пластинами 42' и посредством соответствующего изгиба 22 транспортируются через переходную зону 20 или 20'.
В переходной зоне, следуя за зажимными кулисами 50 вниз по ходу движения, соответствующие пластины 42' удерживаются соответствующими возбужденными электромагнитами 48 в положении зажима, пока соответствующее транспортное тело 12 не окажется на направляющем участке 16' второй рельсовой нитки 16. Соответственно невозбужденный электромагнит возвращает пластины 42', временно удерживаемые соответствующей зажимной кулисой 50 в положении зажима, в их исходное положение, прежде чем они смогут оказать воздействие на удерживаемое соответственно другим переводным устройством транспортное тело 12.
Поскольку в переходной зоне транспортные тела 12 связаны с транспортирующим элементом 30 соответствующего переводного устройства, можно также транспортировать транспортные тела 12 через переходную зону полностью без направляющей со стороны рельсов, что обеспечивает также перевод движущихся по рельсам наружных бегунков.
Описанный принцип перевода транспортных тел 12 с первой рельсовой нитки 14 или 18 на вторую рельсовую нитку 16 или 18 применим также в том случае, если две рельсовые нитки, например 14 и 16, соосны между собой, т.е. если угол α между этими рельсовыми нитками составляет 180o. При этом может быть предусмотрено только одно переводное устройство 26, которое расположено либо на внутренней стороне имеющей изгиб переходной зоны, как это изображено на чертежах, либо при прямолинейной переходной зоне - на наружной стороне соосных рельсовых ниток. В последнем случае транспортирующий элемент 30 выполнен так, как это изображено на фиг. 9, причем соединительные средства движутся по замкнутой траектории, которая в соответствии с конфигурацией транспортирующего элемента 30 имеет удлиненный отрезок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНВЕЙЕРНОЙ ТРАНСПОРТИРОВКИ | 1998 |
|
RU2213686C2 |
| ТРАНСПОРТНАЯ СИСТЕМА | 1998 |
|
RU2213687C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ПРЕДМЕТОВ, ТРАНСПОРТИРУЕМЫХ В КАСКАДНОМ ПОТОКЕ | 1998 |
|
RU2194002C2 |
| РЕЛЬСОВЫЙ ПУТЬ ДЛЯ РЕЛЬСОВО-БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО УСТРОЙСТВА С КОМБИНИРОВАННОЙ ЭНЕРГОУСТАНОВКОЙ | 2004 |
|
RU2270772C1 |
| СИСТЕМА РЕЛЬСОВОГО СКРЕПЛЕНИЯ В ПЕРЕХОДНЫХ ЗОНАХ | 2013 |
|
RU2605813C2 |
| ГРУЗОВОЙ ВАГОН С ОТКИДНЫМИ БОКОВЫМИ СТЕНКАМИ ВАГОНА | 2013 |
|
RU2645550C2 |
| Устройство для торможения рельсовых транспортных средств | 1982 |
|
SU1074752A1 |
| Стрелочное устройство для рельсовых магнитных транспортных средств | 1988 |
|
SU1655305A3 |
| ЧЕЛНОЧНАЯ БАЛКА ДЛЯ ТРАНСПОРТИРОВКИ ВАГОННЫХ НАДСТАВОК, УСТРОЙСТВО ДЛЯ ПЕРЕВАЛКИ ГРУЗОВ С ТАКОЙ ЧЕЛНОЧНОЙ БАЛКОЙ И СПОСОБ ПЕРЕВАЛКИ ГРУЗОВ | 2016 |
|
RU2705461C2 |
| РОЛИКОВОЕ УСТРОЙСТВО ДЛЯ ОСТРЯКОВОГО РЕЛЬСА СТРЕЛОЧНОГО ПЕРЕВОДА | 2011 |
|
RU2575317C2 |
Изобретение относится к транспортировке печатной продукции. Переводные устройства (26, 26') для подачи поступающих по первой рельсовой нитке (14) транспортных тел (12) к второй (16) или третьей (18) рельсовой нитке, расположенной к первой рельсовой нитке (14) под углом α, расположены относительно изгиба переходной зоны между первой рельсовой ниткой (14) и второй (16), или третьей (18) рельсовой ниткой радиально внутри. Они содержат приводимый в непрерывное вращение транспортирующий диск (28) и выполненное в виде пластинчатого колеса (42) соединительное средство (56). Пластины (42') пластинчатого колеса (42) выполнены с возможностью управляемого перевода в положение зажима для зажима транспортного тела (12) между ними и транспортирующим диском (28) и перемещения через зону перевода. Предложенная конструкция позволит при высокой производительности обеспечить перевод поступающих по первой рельсовой нитке транспортных тел на вторую рельсовую нитку, даже если они следуют друг за другом с очень малым промежутком между собой или упираются друг в друга. 16 з.п. ф-лы, 15 ил.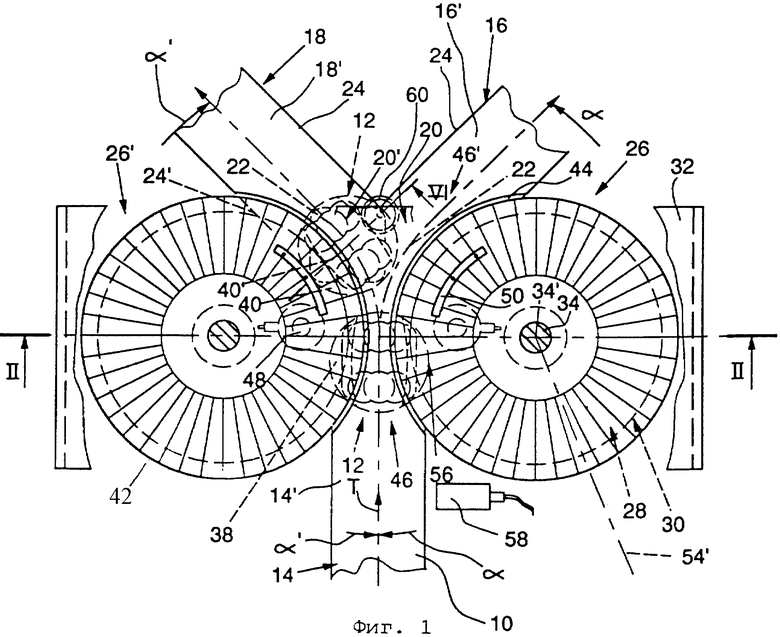
| ЕР 0399188 А, 28.11.1990 | |||
| US 4638906 А, 27.01.1987 | |||
| СН 659053 А5, 31.12.1986 | |||
| Шаговый транспортер для поточных линий | 1977 |
|
SU655489A1 |
| Устройство для укладки в стопы печатной продукции | 1977 |
|
SU740151A3 |

