Изобретение относится к способу и устройству для определения местоположения и извлечения предметов из транспортирующего устройства, такого как бункер или поддон для грузов, в которых для извлечения предметов используется робот с подвижным манипулятором.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Во многих отраслях промышленности есть необходимость в извлечении предметов из транспортирующего устройства, такого как бункер или поддон для грузов, для того, чтобы подать их к машине для дальнейшей обработки. Такие операции часто выполняются промышленными роботами. Было предложено, чтобы промышленные роботы, используемые для извлечения предметов из транспортирующего устройства, были оборудованы техническим зрением для того, чтобы помогать роботу при извлечении предметов. Например, в патенте США №4412293 описан робототехнический комплекс, реализующий зрение и захватное устройство с параллельными губками для сбора случайно ориентированных заготовок с цилиндрическими наружными поверхностями, сложенных в бункер. Для зрения робототехнический комплекс использует видеокамеры, которые соединены с компьютером. Система извлечения из бункера описана также в патенте США №6721444.
Цель настоящего изобретения состоит в создании улучшенных способа и устройства для определения местоположения и извлечения предметов из транспортирующего устройства.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение относится к способу определения местоположения и извлечения предметов, расположенных в транспортирующем устройстве. Способ включает этапы проведения сканирования по меньшей мере части транспортирующего устройства с использованием линейного лазерного сканера и использования результата сканирования для выработки виртуальной трехмерной поверхности, которая отображает отсканированную область. Виртуальную трехмерную поверхность сравнивают с заданным виртуальным предметом, соответствующим извлекаемому из транспортирующего устройства предмету. Таким образом идентифицируют часть трехмерной поверхности, которая наиболее точно соответствует заданному виртуальному предмету. Затем манипулятор робота перемещают к местоположению, соответствующему идентифицированной части виртуальной трехмерной поверхности, и он извлекает предмет из транспортирующего устройства в этом местоположении.
В одном варианте выполнения сканер перемещают по траектории над транспортирующим устройством во время операции сканирования. Сканер предпочтительно следует по линейной траектории над транспортирующим устройством. Тем не менее также могут быть предусмотрены варианты выполнения изобретения, где сканер остается на одном месте во время операции сканирования, но при этом его вращают/поворачивают вокруг оси таким образом, чтобы лазер мог охватить определенную областью.
В предпочтительном варианте выполнения сканер является блоком, который выполнен отдельно от манипулятора.
Тем не менее также возможны варианты выполнения, в которых сканер расположен непосредственно на манипуляторе. В таких вариантах выполнения сканер может перемещаться над транспортирующим устройством при перемещении, совершаемым манипулятором.
Этап сравнения виртуальной трехмерной поверхности с заданным виртуальным предметом может включать перемещение и/или поворот виртуального предмета до тех пор, пока он не будет соответствовать части виртуальной трехмерной поверхности. Информацию о перемещении и/или повороте виртуального предмета используют для определения того, как будет извлечен предмет, расположенный в транспортирующем устройстве.
Предмет, извлекаемый из транспортирующего устройства, может быть извлечен посредством захватного устройства манипулятора, которое может содержать пальцы, по меньшей мере один из которых перемещается относительно другого пальца для захвата предмета в транспортирующем устройстве.
В случае, когда две или более части виртуальной трехмерной поверхности соответствуют виртуальному предмету в одинаковой степени, для выбора между ними может использоваться случайный выбор.
Этап сравнения виртуальной трехмерной поверхности с заданным виртуальным предметом может включать поворот последнего до тех пор, пока он не будет соответствовать части виртуальной трехмерной поверхности, и информация об ориентации виртуального предмета может использоваться для выбора между различными частями виртуальной трехмерной поверхности в случае, когда ее две или более части соответствуют виртуальному предмету в одинаковой степени.
В одном варианте выполнения транспортирующее устройство представляет собой бункер. Также возможны другие виды транспортирующего устройства. Например, транспортирующее устройство также может быть конвейером, таким как ленточный конвейер. Также транспортирующее устройство может быть поддоном для грузов.
Изобретение также относится к устройству для определения местоположения и извлечения предметов, расположенных в транспортирующем устройстве. Устройство содержит линейный лазерный сканер, выполненный с возможностью сканирования, по меньшей мере, части транспортирующего устройства, на котором могут быть расположены предметы. Кроме того, устройство содержит робот с манипулятором, предназначенным для захвата предметов, и компьютер, соединенный с линейным лазерным сканером. Кроме того, компьютер содержит программное обеспечение, предназначенное для выработки виртуальной трехмерной поверхности на основе данных, полученных от сканера во время операции сканирования. Компьютер также содержит программное обеспечение для отображения виртуального предмета и для сравнения его с различными частями виртуальной трехмерной поверхности и определения той части или частей виртуальной поверхности, которые наиболее точно соответствуют виртуальному предмету. Компьютер соединен с роботом и содержит программное обеспечение для управления перемещением манипулятора в местоположение в транспортирующем устройстве, соответствующее той части виртуальной трехмерной поверхности, которая наиболее точно соответствует виртуальному предмету, и для извлечения предмета в этом местоположении.
Извлекаемый из транспортирующего устройства предмет предпочтительно определяется не только его местоположением, но также и ориентацией.
Линейный лазерный сканер может быть выполнен отдельно от робота с возможностью перемещения по заданной траектории, определенной направляющей конструкцией, на которой перемещается сканер. Направляющая конструкция может быть балкой, задающей линейную траекторию для линейного лазерного сканера.
В качестве альтернативы линейный лазерный сканер выполнен на манипуляторе.
Манипулятор может быть выполнен с возможностью захвата предметов с помощью захватного устройства с захватными пальцами, по меньшей мере один из которых выполнен с возможностью перемещения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 показано предложенное устройство.
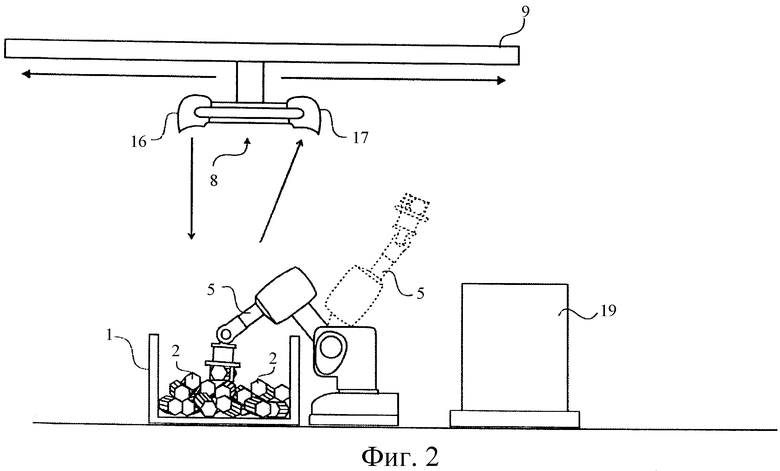
На фиг.2 показан вид сбоку устройства, показанного на фиг.1.
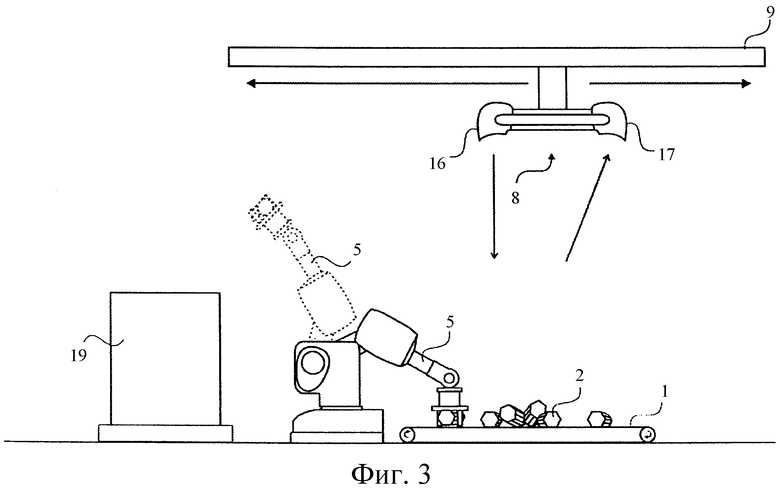
На фиг.3 показан вид, соответствующий фиг.2, но с несколько иными
окружающими условиями эксплуатации предложенного устройства.
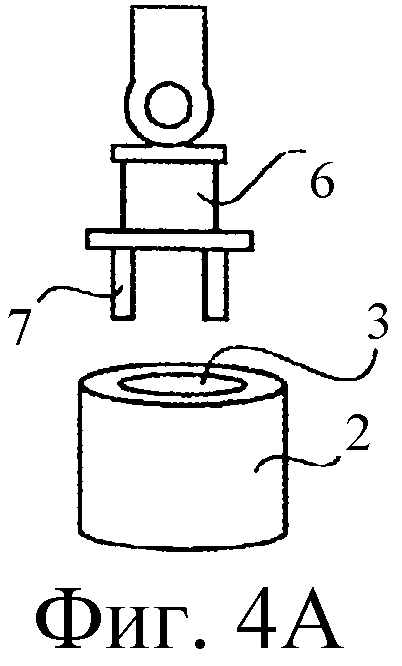
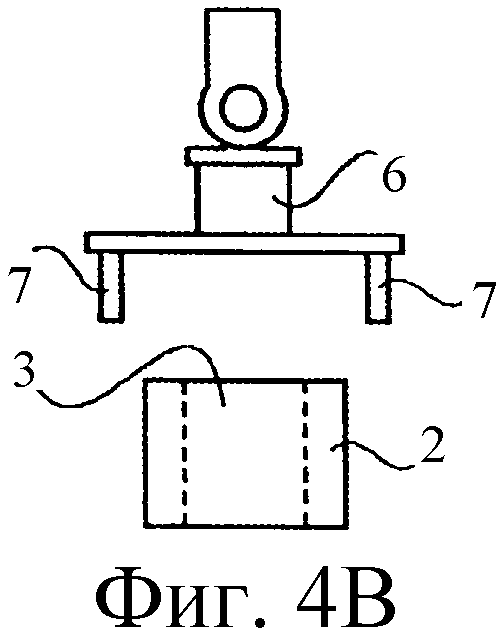
На фиг.4а-4с проиллюстрирована операция захватывания.
На фиг.5а-5с проиллюстрирована разновидность операции, показанной на фиг.4а-4с.
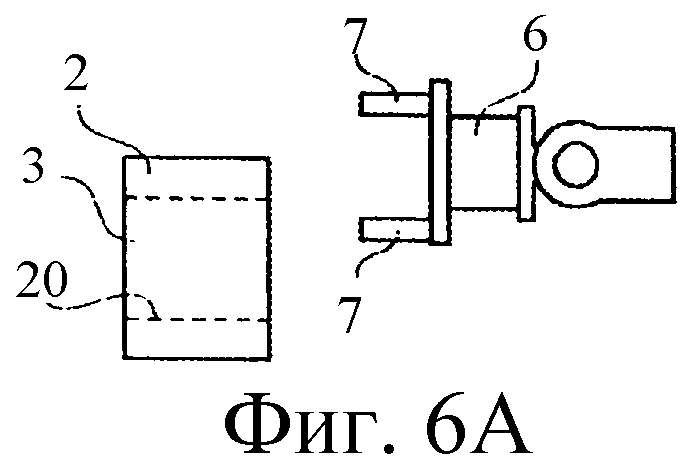
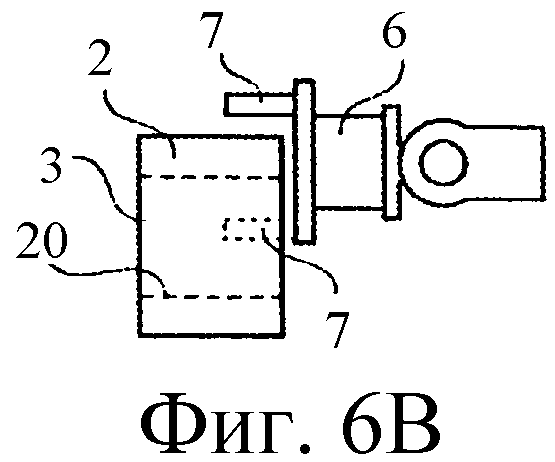
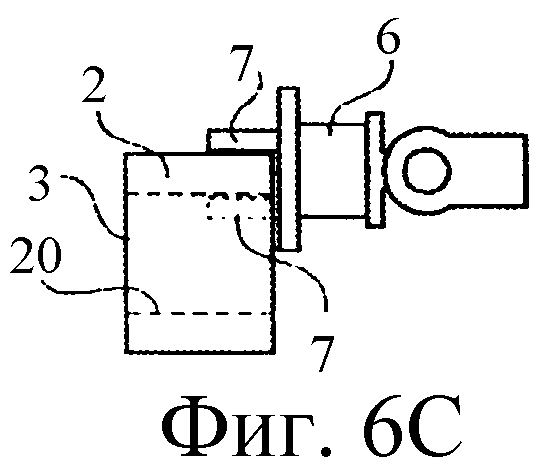
На фиг.6а-6с проиллюстрирована еще одна операция захватывания.
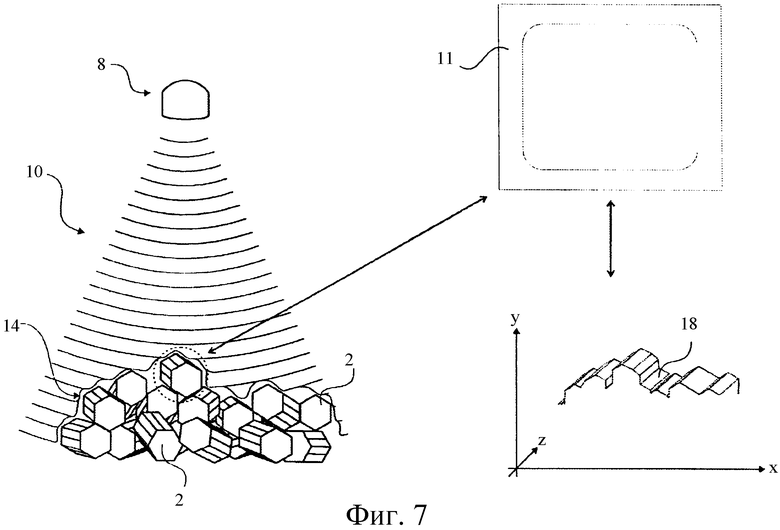
На фиг.7 схематически показано, как вырабатывается виртуальная
поверхность, которая отображает действительную поверхность.
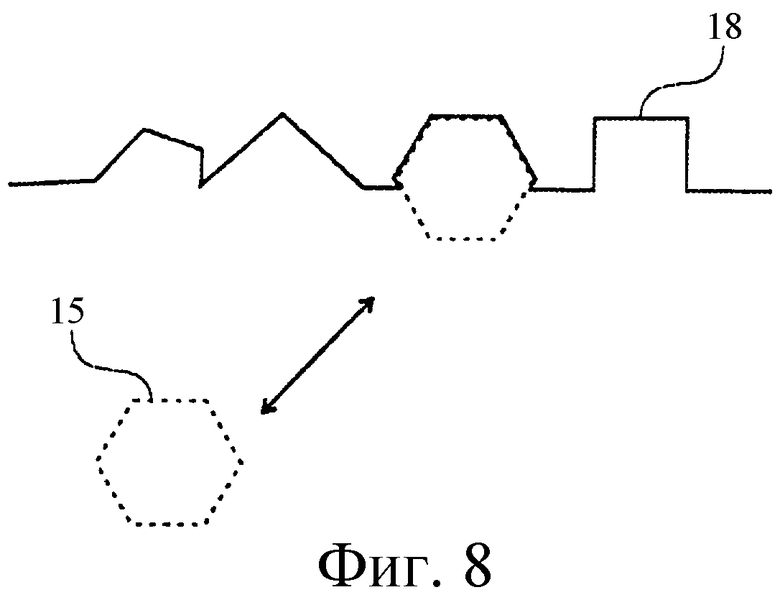
На фиг.8 показано схематическое отображение того, как виртуальный
предмет сопоставляется с виртуальной поверхностью.
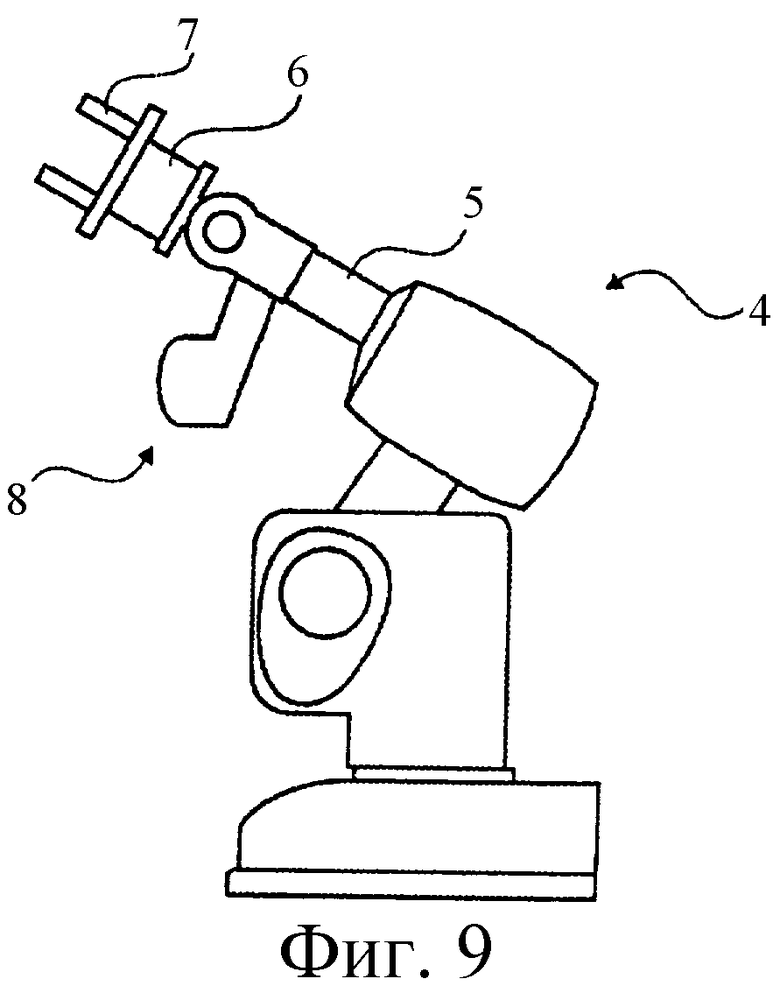
На фиг.9 схематически показан вариант выполнения, являющийся
альтернативным показанному на фиг.1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Сначала будет описано предложенное устройство со ссылками на фиг.1-3. Предложенное устройство предназначено для определения местоположения и извлечения предметов 2, расположенных в транспортирующем устройстве 1. На фиг.1 транспортирующее устройство 1 представляет собой бункер или ящик, из которых достаются предметы 2. Устройство содержит линейный лазерный сканер 8 для выполнения операции сканирования, выполненный таким образом, чтобы он мог использоваться для сканирования по меньшей мере части транспортирующего устройства 1, на котором могут быть расположены предметы 2. В линейном лазере свет от источника точечного лазера растягивается в линию. Это может достигаться за счет использования соответствующей линзы, сделанной, например, из стекла, органического стекла или кварца. Как лучше всего видно на фиг.1, лазерный сканер 8 содержит лазерный излучатель 16, из которого может выходить луч 10 линейного лазера, и лазерный детектор 17, который может обнаруживать лазерный пучок, выпущенный излучателем 16 и отраженный от поверхности. Лазерный излучатель 16 может быть, например, линейным лазером такого типа, который продается под торговой маркой «Lasiris™» компанией «StockerYale Canada», расположенной адресу: 275, Kesmark, Montreal, Quebec, Canada. Однако использование других лазерных излучателей, разумеется, также возможно. Кроме того, устройство содержит робот 4 с манипулятором 5 для захвата предметов 2. Компьютер 11 соединен с линейным лазерным сканером 8 посредством соединения 12, которое может быть проводным, но также возможно и беспроводное соединение. Как будет более подробно разъяснено при описании способа, компьютер 11 имеет программное обеспечение, предназначенное для выработки виртуальной трехмерной поверхности на основании данных, полученных от сканера 8 во время операции сканирования. Компьютер 11 также имеет программное обеспечение, отображающее виртуальный предмет 15, и программное обеспечение для сравнения виртуального предмета 15 с различными частями виртуальной трехмерной поверхности и определения того, какая часть или части виртуальной поверхности наиболее точно соответствуют виртуальному предмету 15. Следует понимать, что виртуальный предмет 15 соответствует физическим предметам 2, которые извлекаются из транспортирующего устройства 1. Виртуальный предмет 15 может быть основан, например, на измерении или сканировании физического предмета. В качестве альтернативы виртуальный предмет 15 может быть основан на CAD-модели, используемой для изготовления соответствующего физического предмета 2. Кроме того, компьютер 11 соединен с роботом 4 и имеет программное обеспечение для управления перемещением манипулятора 5 к местоположению в транспортирующем устройстве, соответствующему части виртуальной трехмерной поверхности, которая наиболее точно соответствует виртуальному предмету, и извлечения предмета 2 в этом местоположении и при ориентации, которая соответствует ориентации предмета 2, который необходимо извлечь. С целью иллюстрации компьютер 11 показан выполненным отдельно от робота 4. Тем не менее следует понимать, что компьютер 11 также может быть неотъемлемой частью робота 4.
В вариантах выполнения, показанных на фиг.1-3, линейный лазерный сканер 8 выполнен отдельно от робота 4 с возможностью перемещения по заданной траектории, заданной направляющей конструкцией 9, по которой сканер 8 перемещается. В предпочтительном варианте выполнения направляющая конструкция 9 является балкой 9, которая задает линейную траекторию перемещения для линейного лазерного сканера. Однако следует понимать, что линейный лазерный сканер 8 также может быть выполнен на манипуляторе 5. Такой вариант выполнения схематически показан на фиг.9.
В принципе манипулятор 5 может иметь много различных устройств для извлечения предметов 2. Например, он может быть снабжен чашечной присоской или с магнитом для извлечения металлических предметов 2. Тем не менее в предпочтительных вариантах выполнения изобретения манипулятор 5 приспособлен для захвата предметов с использованием захватного устройства 6 с захватными пальцами 7. По меньшей мере один из захватных пальцев 7 является подвижным. На фиг.1 показаны два захватных пальца 7, но следует понимать, что захватное устройство 6 может иметь более двух пальцев 7. Например, оно может иметь три, четыре, пять или даже более захватных пальцев 7. Предпочтительно, по меньшей мере два захватных пальца 7 являются подвижными по отношению друг к другу. Захватное устройство 6 предпочтительно соединено шарнирно с манипулятором 5, так что оно может поворачиваться вокруг различных осей и, тем самым, ориентироваться по отношению к извлекаемому им предмету 2. Использование захватного устройства 6 с подвижным пальцем 7 дает то преимущество, что может быть достигнута более высокая точность, а также высокая надежность захвата. Захватное устройство 6 предпочтительно выполнено с возможностью поворота вокруг осей, которые перпендикулярны друг другу. Предпочтительно, оно может поворачиваться вокруг по меньшей мере трех осей, перпендикулярных друг другу. В преимущественных вариантах выполнения изобретения захватное устройство 6 может поворачиваться вокруг более чем трех осей. Например, оно может быть выполнено с возможностью поворота вокруг шести осей.
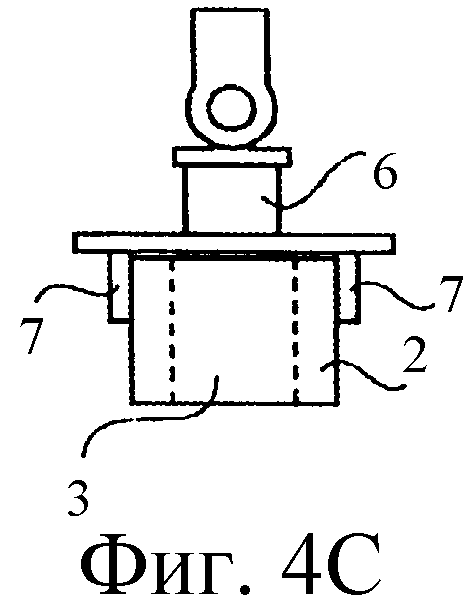
Ниже кратко разъяснено функционирование захватных пальцев со ссылками на фиг.4а-4с, 5а-5с, 6а-6с. На фиг.4а захватное устройство 6 расположено над извлекаемым предметом 2. Как показано на фиг.4b, захватные пальцы 7 затем разделяются, то есть перемещаются друг от друга таким образом, чтобы предмет 2 мог быть расположен между ними. Манипулятор 5 с захватным устройством 6 входит в контакт с предметом 2, пальцы 7 перемещаются по направлению друг к другу, и предмет 2 зажимается между пальцами 7, как показано на фиг.4 с. Затем предмет 2 может быть поднят манипулятором 5.
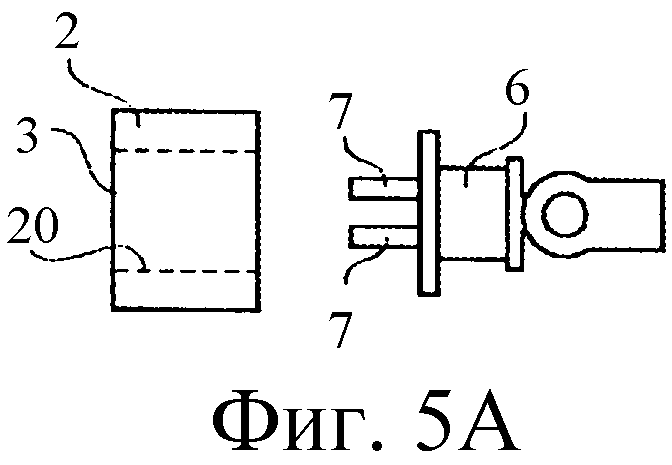
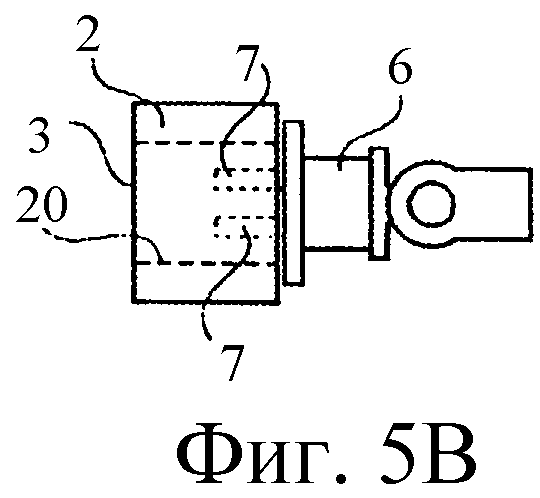
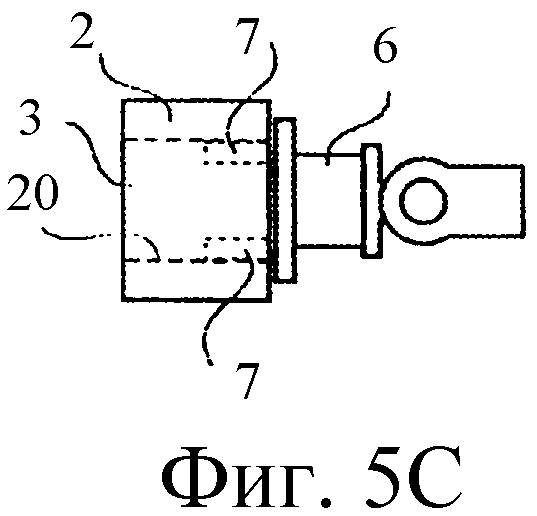
На фиг.6а захватное устройство 6 используется для извлечения предмета 2 со сквозным отверстием 3 и внутренней стенкой 20. Сначала пальцы 7 сводятся вместе, а затем вставляются в сквозное отверстие 3, как показано на фиг.5b. После этого пальцы 7 отделяются друг от друга и входят в контакт с внутренней стенкой 20. Давление пальцев 7 на внутреннюю стенку 20 обеспечивает крепкий захват, и предмет 2 может быть поднят.
На фиг.6а-6с показана операция захвата, когда один палец 7 соприкасается с наружной поверхностью предмета 2, а другой палец 7 соприкасается с внутренней стенкой 20 предмета.
Следует понимать, что не все проиллюстрированные на фиг.4а-6с различные захваты одинаково хорошо подходят для извлечения данного конкретного предмета 2. В зависимости от формы каждого конкретного извлекаемого предмета 2 могут быть предпочтительными различные захваты. Также следует понимать, что для каждого конкретного предмета может существовать оптимальное для приближения к предмету направление перемещения захватного устройства 6.
В процессе эксплуатации изобретение функционирует следующим образом. Предметы 2 прибывают на транспортирующем устройстве 1, которым может быть, например, бункер 1, как показано на фиг.1 и фиг.2, или ленточный конвейер, как показано на фиг.3. Следует понимать, что транспортирующим устройством 1 также может являться что-либо другое, например поддон. Выполняется операция сканирования по меньшей мере части транспортирующего устройства 1 с использованием линейного лазерного сканера 8. Область, которая сканируется, имеет поверхность 14, соответствующую груде предметов 2, лежащих на транспортирующем устройстве 1. Результат операции сканирования затем используется для выработки виртуальной трехмерной поверхности 18, отображающей отсканированную область, то есть виртуальная поверхность 18 соответствует реальной поверхности 14. Эта операция может производиться в компьютере 11, как схематически показано на фиг.7. Как показано на фиг.7, виртуальная поверхность 18 определяется координатами, которые могут изменяться по трем различным осям x, y, z, которые перпендикулярны друг другу. Виртуальная трехмерная поверхность 18 затем сравнивается с заданным виртуальным предметом 15, который соответствует извлекаемому из транспортирующего устройства 1 предмету 2. Часть трехмерной поверхности 18, которая наиболее точно соответствует заданному виртуальному предмету 15, идентифицируется посредством сравнения. Манипулятор 5 затем приводится в движение к местоположению, соответствующему идентифицированной части виртуальной трехмерной поверхности, и извлекает предмет 2 из транспортирующего устройства 1 в этом местоположении. Захватное устройство 6 также может быть повернуто так, чтобы оно четко соответствовало ориентации извлекаемого предмета.
Строго говоря, поверхность является двумерной. Под использованным в данном документе термином «трехмерная поверхность» следует понимать поверхность трехмерного предмета, то есть поверхность, которая может проходить через более чем одну плоскость. В качестве альтернативы термину «виртуальная трехмерная поверхность» можно говорить о виртуальной поверхности, которая отображает наружную поверхность трехмерного предмета.
Этап сравнения виртуальной трехмерной поверхности 18 с заданным виртуальным предметом 15 может быть выполнен следующим образом. Виртуальный предмет 15 перемещается и вращается до тех пор, пока он не будет соответствовать части виртуальной трехмерной поверхности 18, как показано на фиг.8. Информация о перемещении и вращении виртуального предмета 15 непосредственно соответствует ориентации и местоположению физического предмета 2 в транспортирующем устройстве 1, и эта информация затем может быть использована для определения того, как предмет 2 должен быть извлечен из транспортирующего устройства 1. Сопоставление может быть выполнено с использованием алгоритма определения формы, такого как «Вращающийся-Образ» («Spin-Image») или представления изображения при вращении (см., например, А.Е. Johnson and M. Hebert, «Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes»; IEEE Trans. Pattern Analysis and Machine Intelligence, 21 (5, pp.433-449, 1999)). В качестве альтернативы также можно использовать «ICP» («Итерационная ближайшая точка») или комбинацию «Spin-Image» и «ICP».
В случае, когда две или более частей виртуальной трехмерной поверхности 18 соответствуют виртуальному предмету 15 в одинаковой степени, то для выбора между различными частями виртуальной трехмерной поверхности может быть использован случайный выбор, а также между различными извлекаемыми предметами. В качестве альтернативы может быть использована информация об ориентации виртуального предмета 15 для выбора между различными частями виртуальной трехмерной поверхности в случае, если две или более частей виртуальной трехмерной поверхности соответствуют виртуальному предмету в одинаковой степени. Как указывалось ранее, все захваты не являются в равной степени подходящими для всех предметов 2. Для заданного предмета 2 предпочтительный захват может быть включен в программное обеспечение компьютера 11, который управляет роботом 4. Для предмета 2 со сквозным отверстием 3 предпочтительным захватом может быть (например) захват, показанный на фиг.5а-5с. Для заданного предмета на транспортирующем устройстве 1 может быть так, что фактически возможен только один захват. Если две или более частей виртуальной поверхности 18 соответствуют виртуальному предмету 15 в равной степени хорошо, программное обеспечение, которое управляет роботом 4, может содержать инструкцию для выбора части виртуальной поверхности 18, которая соответствует предпочтительному захвату. Это дает предложенному устройству возможность сделать интеллектный выбор между различными предметами 2 на транспортирующем устройстве также в том случае, когда два предмета 2 на транспортирующем устройстве с первого взгляда могут казаться в равной степени подходящими в пределах досягаемости. Для проверки того, какие захваты возможны для заданного предмета 2, программное обеспечение проверяет то, как виртуальный предмет 15 был перемещен и повернут для достижения соответствия с соответствующей частью виртуальной поверхности 18. Информация об этом перемещении может быть непосредственно переведена в информацию об ориентации реального предмета. Разумеется та же самая информация может также быть использована для управления перемещением захватного устройства 6 на манипуляторе 5 и для определения того, с какого направления захватному устройству 6 необходимо приблизиться к предмету 2 для того, чтобы можно было использовать предпочтительный захват. Это дает то преимущество, что захватное устройство 6 может быть точно направлено к идеальному захвату для каждого извлекаемого предмета. Направление, с которого захватное устройство 6 приближается к предмету, также является важным, так как при некоторых направления приближения может возникать риск столкновения между захватным устройством и частями транспортирующего устройства 1 или между захватным устройством и другими предметами 2, которые не должны быть извлечены. Какой-либо предмет также может иметь такую форму, что его легче захватить с одного направления, чем с другого.
Кроме того, операция сканирования также может распространяться на само транспортирующее устройство 1. Результат этой части операции сканирования может быть использован для предотвращения столкновения захватного устройства 6 с краями или стенками транспортирующего устройства 1. В качестве альтернативы контуры транспортирующего устройства 1 могут быть заданы в управляющем программном обеспечении точно так же, как виртуальный предмет 15. Следует понимать, что когда большое количество несортированных предметов прибывает в виде груды, сначала некоторые предметы будет просто невозможно захватить, так как доступу захватного устройства к ним будут препятствовать другие предметы. Также может быть такая ситуация, что местоположение и ориентация предмета по отношению к краям транспортирующего устройства (например, к стенкам бункера 1) будет означать, что для захватного устройства 6 изначально трудно получить доступ к этим предметам, особенно когда другие предметы 2 ограничивают доступ. Программное обеспечение, которое управляет перемещениями манипулятора 5 и захватного устройства 6 на нем, предпочтительно выполнено с возможностью учитывать это. Следовательно, когда необходимо сделать выбор между двумя различными предметами 2 на транспортирующем устройстве 1, программное обеспечение может учитывать риск столкновения как с другими предметами, так и с частями транспортирующего устройства 1. При этом программное обеспечение может быть выполнено с возможностью учета направления, с которого захватное устройство должно приближаться к извлекаемому предмету. Это может составлять еще один критерий выбора предмета.
Также следует понимать, что критерий «предпочтительный захват» может быть использован не только как дополнение к критерию «наибольшее соответствие», но и как альтернатива этому критерию. На практике это может означать, что программное обеспечение сначала стремится идентифицировать предметы 2, которые позволяют предпочтительный захват. Как вариант, если есть несколько предметов 2, которые позволяют предпочтительный захват, то тогда критерий «наибольшее соответствие» может быть использован для осуществления окончательного выбора.
Во время операции сканирования сканер 8 предпочтительно перемещается по траектории, предпочтительно линейной, над транспортирующим устройством 1. Тем не менее следует понимать, что в действительности возможны нелинейные траектории. Также следует понимать, что сканер 8 может быть неподвижным, и что операция сканирования может включать вращение лазерного излучателя 16 вместо перемещения его по линейной траектории.
Также следует понимать, что сканер 8 может быть расположен на манипуляторе 5, как показано на фиг.9, и что перемещение сканера 8 над транспортирующим устройством 1 может быть выполнено посредством манипулятора 5.
Полный цикл работы предложенного устройства, соответственно, состоит в следующем. Предметы 2, которые могут быть ориентированы случайным образом, прибывают на транспортирующем устройстве 1, которое может быть бункером 1, как показано на фиг.2, или ленточным конвейером, как показано на фиг.3. Сканер 8 выполняет операцию сканирования, и данные о результатах операции сканирования посылаются в компьютер 11, где они преобразуются в виртуальную трехмерную поверхность 18. Заданный виртуальный предмет 15 сравнивается с виртуальной поверхностью 18 до тех пор, пока не будет установлено соответствие. Компьютер управляет роботом 4 и дает ему команду на использование манипулятора 5 с захватным устройством 6 для извлечения идентифицированного предмета 2. Когда предмет 2 извлечен манипулятором 5, последний перемещает его к следующему участку 19 обработки, которое может быть, например, машиной для дальнейшей обработки предмета 2. В течение того времени, которое требуется роботу для перемещения предмета к следующему участку обработки, может быть выполнена новая операция сканирования, так что новый цикл начинается даже до того, как завершен предшествующий.
Изобретение дает среди прочего то преимущество, что случайно ориентированные предметы, прибывающие сваленными друг на друга, могут быть быстро и достоверно идентифицированы и извлечены индивидуально. Также изобретение делает возможным извлечение предметов с оптимального направления и с очень точным и надежным захватом. Как было показано выше, варианты выполнения изобретения также могут понижать риск того, что захватное устройство 6 или манипулятор 5 столкнутся с окружающими предметами, например краями или стенками транспортирующего устройства 1.
Если сканер 8 выполнен отдельно от робота 4, то новая операция сканирования может быть начата в то время, пока манипулятор 5 доставляет предмет в другое местоположение. Это может сделать процесс более быстрым.
Применение линейного лазера означает, что во время одного отдельного перемещения сканера может быть отсканирована полностью вся область, чего было бы невозможно достичь с точечным лазером.
Описанное выше изобретение относится к способу и устройству, где для извлечения предметов используется манипулятор. Тем не менее также возможны варианты выполнения, где показанный выше способ сканирования и идентификации трехмерных конструкций может быть использован для других целей. Например, способ выполнения сканирования с линейным лазером и выработкой виртуальной трехмерной поверхности может быть использован для идентификации и анализа дефектов различных объектов. Другое возможное применение может быть с целью определения необходимости дальнейшей обработки заготовки. Таким образом, возможны варианты выполнения без манипулятора и/или для других целей, отличных от извлечения предметов. Следовательно, изобретение также может быть определено как способ (и устройство) для идентификации и анализа предметов (или групп предметов) посредством сканирования с помощью линейного лазерного устройства и выработки виртуальной трехмерной модели, которую затем сравнивают с заданным виртуальным предметом. После сравнения может производиться действие, которое зависит от его результата. Это действие может быть, например, действием по обработке заготовки или может включать использование манипулятора для извлечения предмета, как описано выше.
Пример такого возможного способа описан далее. Заданный виртуальный предмет отображает окончательную форму, которую должна иметь заготовка. Выполняется операция сканирования, которое используется для выработки виртуальной трехмерной поверхности или модели, которая затем сравнивается с заданным виртуальным предметом. Сравнение показывает, что заготовка еще не получила окончательной формы. Также сравнение выявляет, где обрабатываемое изделие отличается от заданного виртуального предмета. На основании этой информации дается инструкция станку, например для резки, сверлильному или токарному, который выполняет механическую обработку заготовки, чтобы сделать ее соответствующей заданному виртуальному предмету. Затем снова может быть выполнена операция сканирования с целью проверки того, что заготовка получила необходимую форму.
Другой возможностью может быть идентификация дефектных предметов. Например, предмет прибывает на транспортирующем устройстве. Этот предмет сканируется линейным лазером, и результат сканирования сравнивается с заданным виртуальным предметом. По результатам сканирования система определяет, соответствует ли предмет заданному виртуальному предмету или нет. Если есть соответствие, то предмет считается надлежащим. Затем предмет может быть использован, отправлен на следующий участок обработки или конечному потребителю. Если обнаружено отклонение, то предмет может быть удален. Предложенные способ и устройство, следовательно, могут быть использованы для контроля качества. Иначе способ и устройство могут быть идентичны способу/устройству, используемым для извлечения предметов из транспортирующего устройства.
Соответственно изобретение может быть определено как способ идентификации предметов, включающий операцию сканирования по меньшей мере части предмета (или нескольких предметов) с использованием линейного лазерного сканера 8; использование результата сканирования для выработки виртуальной трехмерной поверхности, отображающей область, которая была отсканирована; сравнение виртуальной трехмерной поверхности с заданным предметом 15, соответствующим предмету (или одному предмету из многих) и выполнение действия в зависимости от результата сравнения. Разумеется, что изобретение также может быть определено как устройство для осуществления такого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильное приводное устройство для обработки предмета | 2017 |
|
RU2768803C2 |
| Способ сортировки отходов | 2022 |
|
RU2806224C1 |
| РОБОТИЗИРОВАННАЯ КУХОННАЯ СИСТЕМА (ВАРИАНТЫ), СПОСОБ УПРАВЛЕНИЯ И КУХОННЫЙ МОДУЛЬ С ЕЁ ИСПОЛЬЗОВАНИЕМ (ВАРИАНТЫ) | 2015 |
|
RU2743194C1 |
| СПОСОБ СОРТИРОВКИ МУСОРА | 2016 |
|
RU2624288C1 |
| СИСТЕМА ПОЛУЧЕНИЯ РЕАЛИСТИЧНОЙ МОДЕЛИ МЕСТНОСТИ ДЛЯ ВИРТУАЛЬНОГО МИРА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2723239C1 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| СПОСОБ И СИСТЕМА ПЛАНИРОВАНИЯ ДВИЖЕНИЯ РОБОТА-МАНИПУЛЯТОРА ПУТЕМ КОРРЕКЦИИ ОПОРНЫХ ТРАЕКТОРИЙ | 2020 |
|
RU2756437C1 |
| СПОСОБ, КОМПЬЮТЕРНАЯ ПРОГРАММА И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ЗАХВАТА | 2011 |
|
RU2594231C2 |
| РОБОТИЗИРОВАННАЯ КУХОННАЯ СИСТЕМА | 2015 |
|
RU2743044C1 |
| УНИВЕРСАЛЬНОЕ ПЕРИФЕРИЙНОЕ УСТРОЙСТВО ДЛЯ ПЕРСОНАЛЬНЫХ КОМПЬЮТЕРОВ | 2017 |
|
RU2651157C2 |
Изобретение относится к робототехнике. Технический результат - повышение точности функционирования манипулятора. Существо изобретения заключается в том, что выполняют операцию сканирования транспортирующего устройства посредством линейного лазерного сканера (8). Результат сканирования используют для выработки виртуальной поверхности (18), которая отображает отсканированную область. Виртуальную поверхность сравнивают с заданным предметом (15), соответствующим предмету (2), извлекаемому из транспортирующего устройства (1). Таким образом, идентифицируется часть виртуальной поверхности (18), которая соответствует заданному предмету (15). Затем манипулятор (5) робота перемещают к местоположению, соответствующему идентифицированной части виртуальной поверхности, и он извлекает предмет из транспортирующего устройства (1) в этом местоположении. 2 н. и 14 з.п. ф-лы, 9 ил.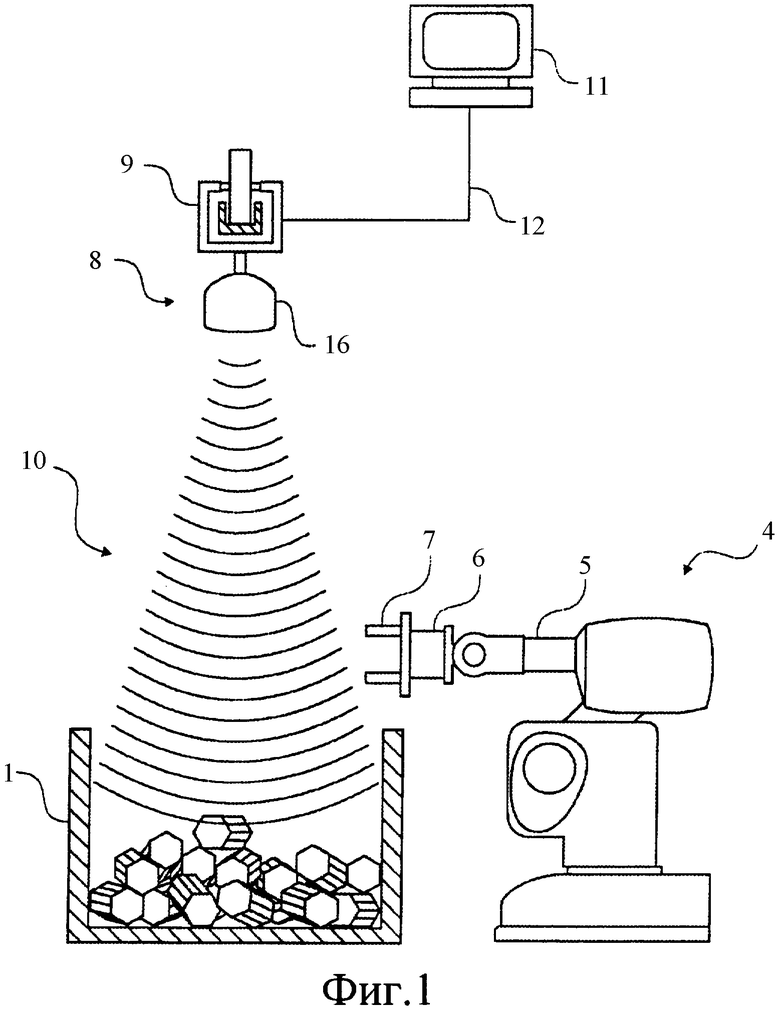
1. Способ определения местоположения и извлечения предметов (2), расположенных в транспортирующем устройстве (1), включающий сканирование по меньшей мере части транспортирующего устройства (1) с использованием линейного лазерного сканера (8), использование результата сканирования для выработки виртуальной трехмерной поверхности, отображающей отсканированную область, сравнение виртуальной трехмерной поверхности с заданным виртуальным предметом (15), соответствующим извлекаемому из транспортирующего устройства (1) предмету (2), и, таким образом, идентификации той части трехмерной поверхности, которая наиболее точно соответствует заданному виртуальному предмету (15), перемещение манипулятора (5) робота в местоположение, соответствующее идентифицированной части виртуальной трехмерной поверхности, и извлечение предмета (2) из транспортирующего устройства (1) в этом местоположении.
2. Способ по п.1, в котором сканер (8) перемещают по траектории над транспортирующим устройством (1) во время сканирования.
3. Способ по п.2, в котором сканер (8) перемещают по линейной траектории над транспортирующим устройством.
4. Способ по п.3, в котором сканер (8) выполнят в виде блока, отдельного от манипулятора (5).
5. Способ по п.2, в котором сканер (8) располагают на манипуляторе (5), которым перемещают сканер (8) над транспортирующим устройством (1).
6. Способ по п.1, в котором при сравнения виртуальной трехмерной поверхности с заданным виртуальным предметом (15) этот виртуальный предмет (15) поворачивают до тех пор, пока он не будет соответствовать части виртуальной трехмерной поверхности, а информацию о повороте виртуального предмета (15) используют для определения того, как предмет (2), расположенный на транспортирующем устройстве (1), должен быть извлечен.
7. Способ по п.1, в котором предмет (2) извлекают из транспортирующего устройства (1) посредством захватного устройства (6), которое расположено на манипуляторе (5) и содержит захватные пальцы (7), по меньшей мере один из которых перемещают относительно другого для захватывания предмета (2), расположенного в транспортирующем устройстве (1).
8. Способ по п.1, в котором используют случайный выбор для выбора между различными частями виртуальной трехмерной поверхности в случае, когда ее две или более части (2) соответствуют виртуальному предмету (15) в одинаковой степени.
9. Способ по п.1, в котором при сравнении виртуальной трехмерной поверхности с заданным виртуальным предметом (15) этот виртуальный предмет (15) поворачивают до тех пор, пока он не будет соответствовать части виртуальной трехмерной поверхности, а информацию об ориентации виртуального предмета (15) используют для выбора между различными частями виртуальной трехмерной поверхности в случае, когда ее две или более части соответствуют виртуальному предмету в одинаковой степени.
10. Способ по п.1, в котором в качестве транспортирующего устройства (1) используют бункер.
11. Способ по п.1, в котором в качестве транспортирующего устройства (1) используют конвейер.
12. Устройство для определения местоположения и извлечения предметов (2), расположенных на транспортирующем устройстве, содержащее линейный лазерный сканер (8), выполненный с возможностью сканирования по меньшей мере части транспортирующего устройства, в котором могут быть расположены предметы (2), робот (4) с манипулятором (5), предназначенным для захвата предметов, и компьютер (11), соединенный с линейным лазерным сканером (8) и содержащий программное обеспечение, предназначенное для выработки виртуальной трехмерной поверхности на основании данных, полученных от сканера (8) во время сканирования, а также программное обеспечение, отображающее виртуальный предмет (15), и программное обеспечение, предназначенное для сравнения виртуального предмета (15) с различными частями виртуальной трехмерной поверхности и определения ее части или частей, наиболее точно соответствующих виртуальному предмету (15), причем компьютер (11) соединен с роботом (4) и содержит программное обеспечение для управления перемещением манипулятора (5) к местоположению на транспортирующем устройстве, соответствующему части виртуальной трехмерной поверхности, которая наиболее точно соответствует виртуальному предмету, и извлечения предмета (2) в этом местоположении.
13. Устройство по п.12, в котором линейный лазерный сканер (8) выполнен отдельно от робота (4) и выполнен с возможностью перемещения по заданной траектории, определенной направляющей конструкцией (9), по которой перемещается сканер (8).
14. Устройство по п.13, в котором направляющая конструкция (9) является балкой (9), которая определяет линейную траекторию перемещения линейного лазерного сканера.
15. Устройство по п.12, в котором линейный лазерный сканер (8) расположен на манипуляторе (5).
16. Устройство по п.12, в котором манипулятор (5) выполнен с возможностью захвата предметов с помощью захватного устройства (6) с захватными пальцами (7), по меньшей мере один из которых выполнен с возможностью перемещения.
| US 6721444 B1, 13.04.2004 | |||
| EP 0951968 A2, 27.10.1999 | |||
| US 4486842 A, 04.12.1984 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2147276C1 |

