Изобретение относится к проблеме обращения с отходами, в частности к вопросу обращения с твердыми коммунальными отходами, в том числе к направлению по решению задач вторичного использования отходов.
Одной из важнейшей задачей при обращении с отходами является их сортировка. Изобретение посвящено проблеме сортировки отходов с использованием роботов-манипуляторов, оснащенных захватными устройствами различной конструкции и может найти применение при создании центров по обращению с твердыми коммунальными отходами, обращению с твердыми бытовыми отходами, включая этап сортировки отходов. В роботах - манипуляторах используются различного типа захваты, перемещающие объекты с общего конвейера с отходами, на специализированные конвейера или контейнера - накопители.
Известны способы сортировки мусора с использованием манипуляторов. Например, способ для сортировки мусора компании ZenRobotics [Умный робот для сортировки и сбора мусора, URL: http://robotforum.ru/novosti-texnogologij/robotizirovannaya-texnologiya-sortirovki-musora.html]. Этот способ включает захват сортируемых предметов с конвейера, размещенными вдоль него роботами с манипуляторами, с захватными органами в виде руки. Рука робота оборудована тактильными сенсорами, сигнализирующими о надежности захвата сортируемого предмета. Робот оснащен системой для распознавания мусорных предметов, состоящей из обычных и лазерных сканеров, спектрометров, лазерных 3D-сканеров и различных детекторов, управляемых программным обеспечением робота. Системой распознавания определяются: величина, форма и цвет предмета, его вещественный состав, физические свойства.
Этот известный способ для сортировки мусора компании ZenRobotics, используют следующим образом. Манипуляторы, размещенные вдоль конвейера, захватывают предметы с конвейера и анализируют его лазерными сканерами, определяют его 3D-модель, его размеры; спектрометрами определяют - вещественный состав, детекторами - физические свойства. Данные анализа посредством программного обеспечения робота сравниваются с данными электронных образов, которые заложены в базе данных его памяти. Опознанные предметы укладываются в соответствующие контейнера, остальные направляются в отходы.
Однако рассматриваемый известный способ для сортировки мусора имеет существенный недостаток, заключающийся в том, что его производительность напрямую связана с числом роботов, каждый из которых должен быть оснащен дорогостоящей системой распознавания предметов в виде различных сканеров, спектрометров, детекторов физических свойств, баз данных образов сортируемых предметов.
Этот недостаток частично устранен в известном способе сортировки мусора [RU 2624288. Дата подачи заявки: 04.05.2016, Опубл. 03.07.2017, Бюл. №19. Способ сортировки мусора]. По технической сущности этот способ является наиболее близким к заявляемому. Целью этого изобретения является уменьшение стоимости роботизированных сортировочных устройств путем уменьшения количества систем для распознавания предметов сортируемо мусора. И эта цель достигается тем, что в способе для сортировки мусора, включающем захват предметов с конвейера посредством манипуляторов, управляемых системами распознавания предметов, содержащих сканеры, спектрометры, детекторы и программное обеспечение, распознанные предметы маркируются кодированными метками, а захват манипуляторами сортируемых предметов осуществляется с помощью детекторов кода этих меток.
Действительно, в рассматриваемом известном способе сортировки мусора [RU 2624288] нанесение красителями кодированных меток на сортируемые предметы позволит уменьшить количество систем распознавания предметов, что обеспечит уменьшить стоимость роботизированной сортировочной системы.
Однако, нанесение красителями кодированных меток на сортируемые объекты сортировки с последующим определением этих меток с помощью недорогих сканирующих детекторов, распознающих только метки на поверхности предметов, является относительно сложным и ненадежным способом идентификации объекта отходов на конвейере. При перемещении транспортера конвейера, объект сортировки может наклониться или перевернуться, что затруднит или сделает невозможным сканирование некоторых меток. Таким образом, процесс создания меток на распознанных - идентифицированных объектах является сложным и ненадежным процессом, что является недостатком рассматриваемого способа сортировки мусора.
Техническим результатом является снижение себестоимости, повышение быстродействия процесса распознания объектов на конвейере и перемещение этих объектов в соответствующие накопители, увеличение надежности передачи информации от системы идентификации отдельных объектов на конвейере к роботам-манипуляторам, выполняющим его адресное перемещение.
Технический результат достигается тем, что способ сортировки отходов, включающий захват объектов с конвейера роботами-манипуляторами, управляемыми системами распознавания объектов, содержащими устройства для сканирования, спектрометрирования и детектирования сортируемых объектов, путем сравнения данных с образами в компьютерном программном обеспечении дополнен процессом определения и регистрации координат центра и границ идентифицированного сортируемого объекта на конвейере, для чего на конвейере по длине полотна выполнены опорные метки с равным расстоянием между ними в виде выделенных линий, перпендикулярных полотну конвейера, а система распознавания содержит подпрограмму определения и регистрации координат центра распознанного объекта по отношению к краю конвейера и одной из опорных меток на конвейере.
Данные о месте на конвейере каждого объекта сортировки в пределах площади конвейерной ленты от метки до метки, координатах центра каждого объекта, его границы, свойства, характеристики объекта передаются роботу-манипулятору по каждому идентифицированному объекту или передаются в систему управления несколькими манипуляторами, захватывающими и перемещающими сортируемые объекты.
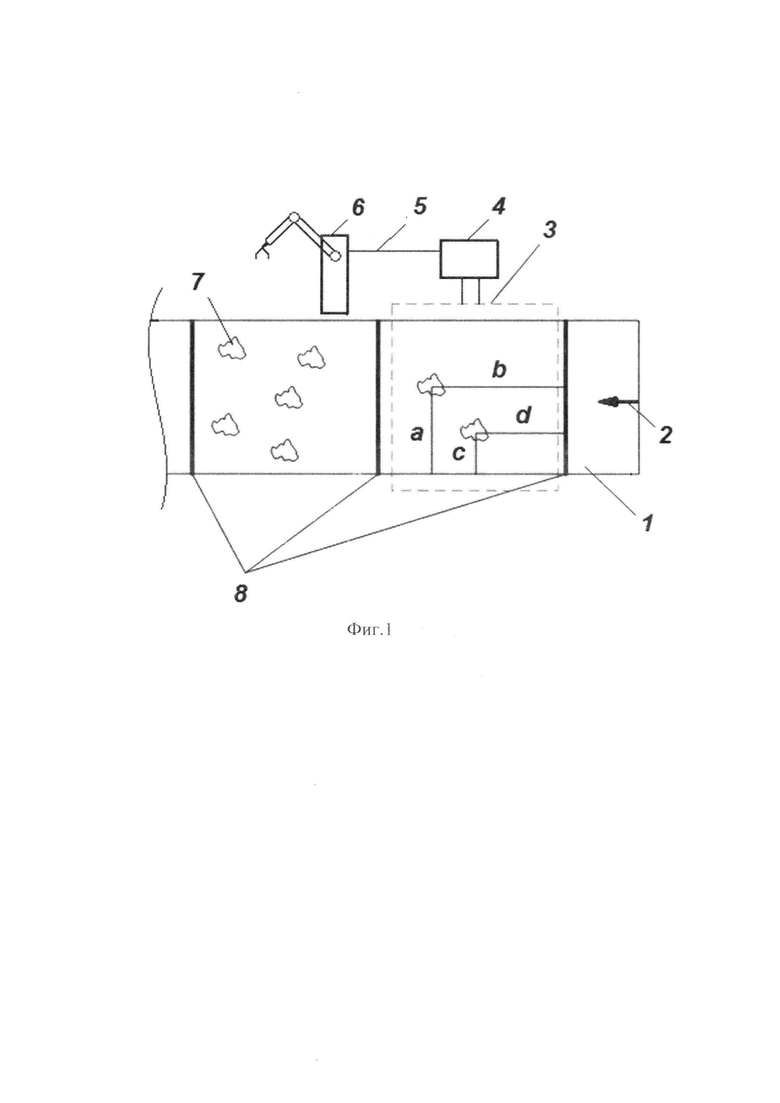
Сущность заявляемого способа поясняется на рисунке.
На Фиг. 1 изображена схема способа сортировки отходов: 1 - конвейер, 2 - направление движения конвейера, 3 - система распознавания объектов, включающая устройства для сканирования, спектрометрирования и детектирования сортируемых объектов, 4 - компьютер, 5 - информационная линия, 6 - робот-манипулятор, 7 - распознаваемые объекты, 8 - опорные метки на конвейере; (a;b), (c;d) - координаты опознанных объектов.
Заявляемый способ реализуется следующим образом. Твердые бытовые отходы 7, освобожденные от негабаритов и мелких фракций, подаются на конвейер 1 в виде монослоя в направлении 2. Система распознавания объектов 3 при сортировке отходов, включающая устройства для сканирования, спектрометрирования и детектирования сортируемых объектов, путем сравнения данных с образами программным обеспечением компьютера 4, используя подпрограмму определения и регистрации координат центра опознанного объекта (а;b) и (или) (c;d) по отношению к краю конвейера и одной из опорных меток 8 на конвейере 1 определяет и фиксирует характеристики распознанных объектов 7 и передает информацию по каждому распознанному объекту в компьютер 4. Данные с компьютера 4 по каждому распознанному объекту 7 передаются роботу-манипулятору 6 в формате: номер объекта + координаты объекта + характеристики объекта для изъятия объекта 7 с движущего монослоя отходов на конвейере 1.
В отличие от аналогов использование электронной информации о распознанных объектах вместо меток краской - упростит процесс сортировки объектом отходов, повысит надежность работы системы распознания и увеличит процент распознаваемости объектов отходов на конвейере. При этом сокращается количество роботов-манипуляторов, что снижает себестоимость участка по сортировке мусора.
Кроме этого заявленный способ позволит увеличить пропускную способность сортировочного конвейера, т.к. уменьшится вероятность неточного распознавания маркеров краской на объектах сортировки, ошибок при опознании роботами-манипуляторами меток, выполненных краской.
По существу метки из краски в прототипе заменены в заявляемом способе на электронную информацию о координатах каждого распознанного объекта и типе этого объекта. Эта информация в электронной форме передается манипуляторам, которые по указанным координатам захватывают распознанный объект и перемещают его в соответствующий накопитель. Полученная роботом-манипулятором информация о типе объекта, который необходимо захватить по указанным координатам может быть использована для применения различные захватных устройств, если такой робот-манипулятор имеет съемные и заменяемые захватные устройства. Для систем, в которых используется группа роботов-манипуляторов, возможна работа отдельных роботов-манипуляторов по захвату и перемещению одного или несколько типов сортируемых объектов, такие системы применяют при большой производительности сортирующей линии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОРТИРОВКИ МУСОРА | 2016 |
|
RU2624288C1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПО СОРТИРОВКЕ ИСПОЛЬЗОВАННОЙ ТАРЫ | 2021 |
|
RU2782408C1 |
| Роботизированный модуль для сортировки твердых бытовых отходов | 2023 |
|
RU2815930C1 |
| КОМПЛЕКС ПЕРЕРАБОТКИ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ С АВТОМАТИЗИРОВАННОЙ СОРТИРОВКОЙ НЕОРГАНИЧЕСКОЙ ЧАСТИ И ПЛАЗМЕННОЙ ГАЗИФИКАЦИЕЙ ОРГАНИЧЕСКОГО ОСТАТКА | 2019 |
|
RU2731729C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС АВТОМАТИЧЕСКОЙ СОРТИРОВКИ ТВЕРДЫХ ОТХОДОВ | 2023 |
|
RU2814860C1 |
| Интеллектуальная система роботизированной сортировки хаотично расположенных объектов | 2022 |
|
RU2813958C1 |
| Программно-аппаратный комплекс для управления автономным мобильным роботом-погрузчиком | 2024 |
|
RU2825022C1 |
| СПОСОБ ОПТИМИЗАЦИИ РОБОТИЗИРОВАННОЙ СОРТИРОВКИ ТКО ПУТЁМ ДИНАМИЧЕСКОГО ПЛАНИРОВАНИЯ ПЕРЕМЕЩЕНИЙ РОБОТА-СОРТИРОВЩИКА | 2020 |
|
RU2755876C1 |
| Круговой сортировочный конвейер | 2023 |
|
RU2809255C1 |
Изобретение относится к способу обращения с отходами, в частности к способу обращения с твердыми коммунальными отходами, в том числе к решению задач вторичного использования отходов. Способ сортировки отходов включает захват объектов с конвейера роботами-манипуляторами, управляемыми системами распознавания объектов, содержащими устройства для сканирования, спектрометрирования и детектирования сортируемых объектов путем сравнения данных с образами в компьютерном программном обеспечении. При этом на конвейере по длине полотна выполнены опорные метки с равным расстоянием между ними в виде выделенных линий, перпендикулярных полотну конвейера, а система распознавания содержит подпрограмму определения и регистрации координат центра распознанного объекта по отношению к краю конвейера и одной из опорных меток на конвейере. Техническим результатом является повышение быстродействия процесса распознания объектов на конвейере и перемещения этих объектов в соответствующие накопители, увеличение надежности передачи информации от системы идентификации отдельных объектов на конвейере к роботам-манипуляторам, выполняющим его адресное перемещение. 1 ил.
Способ сортировки отходов, включающий захват объектов с конвейера роботами-манипуляторами, управляемыми системами распознавания объектов, содержащими устройства для сканирования, спектрометрирования и детектирования сортируемых объектов путем сравнения данных с образами в компьютерном программном обеспечении, отличающийся тем, что на конвейере по длине полотна выполнены опорные метки с равным расстоянием между ними в виде выделенных линий, перпендикулярных полотну конвейера, а система распознавания содержит подпрограмму определения и регистрации координат центра распознанного объекта по отношению к краю конвейера и одной из опорных меток на конвейере.
| СПОСОБ СОРТИРОВКИ МУСОРА | 2016 |
|
RU2624288C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНЫХ УСЛОВИЯХ | 2019 |
|
RU2725640C1 |
| US 9789517 B2, 17.10.2017 | |||
| EP 3389879 B1, 24.02.2021 | |||
| CN 206701918 U, 05.12.2017 | |||
| JP 2020203249 A, 24.12.2020 | |||
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПО СОРТИРОВКЕ ИСПОЛЬЗОВАННОЙ ТАРЫ | 2021 |
|
RU2782408C1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| СПОСОБ, КОМПЬЮТЕРНАЯ ПРОГРАММА И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА ЗАХВАТА | 2011 |
|
RU2594231C2 |
