Изобретение относится к отрасли ЖКХ и предназначено для сортировки бытового мусора с помощью роботов-манипуляторов.
Известны манипуляторы для сортировки бытового мусора по патенту РФ на полезную модель №141015 - «Захват для сортировки мусора». Они содержат захватные органы в виде шипов с острыми наконечниками и с выступами в виде, например, зазубрин или конической резьбы, специализированные на захват определенных предметов, например, шипы с зазубринами накалывают на: дерево, шины, тряпье, газеты, крупные кости и другие пищевые остатки, книги, картон, тонкостенные металлические банки; шипы с наконечником в виде самореза при вращении врезаются в различные пластиковые и металлические емкости, сплавы меди или алюминия или наматывают на себя: полимерные пленки, кабели и тонкие провода. Шипы выполнены с возможностью реверса вращения и вертикального перемещения. Надежность захвата шипами определяется силой трения между ними и деформированной областью захваченного предмета.
Известное устройство работает следующим способом.
Мусор монослоем подается на виброконвейер. Манипуляторы управляются операторами, которые определяют на движущемся конвейере предметы для утилизации и, управляя манипуляторами, захватывают их. Для разгрузки захваченного предмета в контейнер оператор поворачивает манипулятор к соответствующему контейнеру и реверсным вращением шипа или посредством вилочного захвата освобождает шип от предмета. Свободный шип поворачивают в сторону конвейера, где оператор захватывает аналогичный предмет.
Однако известное устройство имеет существенный недостаток, который связан с интенсивным использованием человеческого труда.
Наиболее близким по технической сущности является способ для сортировки мусора компании ZenRobotics, включающий захват сортируемых предметов с конвейера, размещенными вдоль него роботами с манипуляторами, с захватными органами в виде руки. Рука робота оборудована тактильными сенсорами, сигнализирующими о надежности захвата сортируемого предмета. Робот оснащен системой для распознавания мусорных предметов, состоящей из обычных и лазерных сканеров, спектрометров, лазерных 3D-сканнеров и различных детекторов, управляемых программным обеспечением робота. Системой распознавания определяются: величина, форма и цвет предмета, его вещественный состав, физические свойства. (solidwaste.ru>news/view/6805.html)
Известный способ используют следующим образом. Манипуляторы, размещенные вдоль конвейера, захватывают предметы с конвейера и анализируют его: лазерными сканерами определяют его 3D-модель, его размеры, спектрометрами - вещественный состав, детекторами - физические свойства. Эти данные посредством программного обеспечения робота сравниваются с данными, образ которых заложен в его памяти. Опознанные предметы укладываются в соответствующие контейнера, остальные направляются в отходы.
Однако известное устройство имеет существенный недостаток, заключающийся в том, что его производительность напрямую связана с числом роботов, каждый из которых должен быть оснащен дорогостоящей системой распознавания предметов в виде различных сканеров, блоков памяти и программного управления, детекторов и спектрометров.
Целью предлагаемого изобретения является уменьшение стоимости роботизированных сортировочных устройств путем уменьшения числа систем для распознавания предметов бытового мусора.
Указанная цель достигается тем, что в способе для сортировки мусора, включающем захват предметов с конвейера посредством манипуляторов, управляемых системами распознавания предметов, содержащих сканеры, спектрометры, детекторы и программное обеспечение, распознанные предметы маркируются кодированными метками, а захват манипуляторами сортируемых предметов осуществляется с помощью детекторов кода этих меток.
Кроме того, конвейер освещается ультрафиолетовыми фонарями, а метки на предметах окрашиваются флуоресцентными красителями.
Также блок программного обеспечения оснащен образами 3-D моделей частей мусорных предметов, наиболее стойких к деформированию.
Нанесение кодированных меток на сортируемые предметы позволит уменьшить количество систем распознавания предметов, необходимых устройству для их качественной сортировки, так как достаточным условием захвата опознанных предметов манипуляторами, является определение ими нанесенных меток, которое можно осуществить с помощью недорогих сканирующих детекторов, распознающих только метки на поверхности предметов.
Применение ультрафиолетовых фонарей позволит улучшить качество сортировки мусора, а также санитарные условия при сортировке мусора.
Использование 3-D образов наиболее прочных частей или деталей сортируемых предметов позволит увеличить базу данных для системы распознавания.
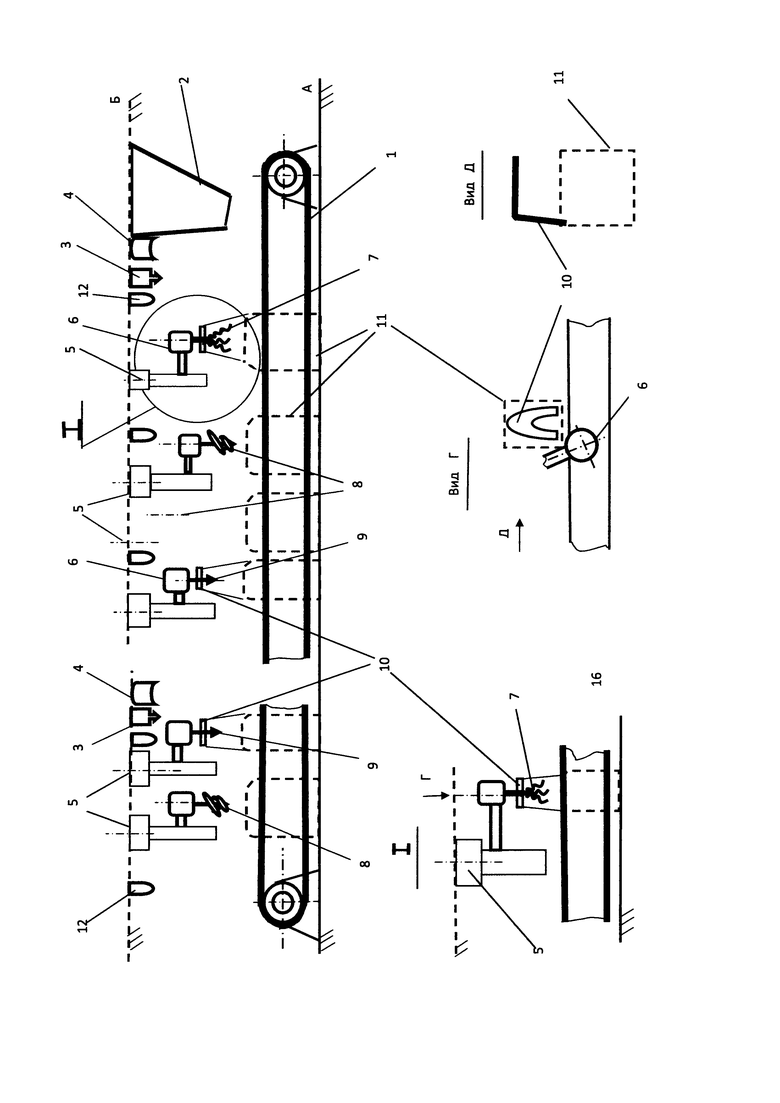
На рисунке изображено сортировочное устройство для реализации предлагаемого способа, которое включает: конвейер 1, загрузочный бункер 2, маркирующие принтеры 3, блок системы распознавания 4. Манипуляторы 5 оснащены патронами 6 с возможностью реверсного вращения и с возможностью азимутального и вертикального перемещений. В патронах 6 закрепляются шипы либо в виде пучка пружинистых щетинок 7, либо в виде саморезов 8, либо в виде невращаюшихся копьевидных захватов 9. Съем предметов с шипов 7 и 9 осуществляется вилочными съемниками 10. Съем предметов с шипов 8 осуществляется путем реверса вращения патрона 6. Разгрузка предметов осуществляется в контейнеры 11. Кроме светильников видимого диапазона, устройство оснащено ультрафиолетовыми фонарями 12.
Заявляемый способ реализуется, например, следующим образом. Бытовой мусор, прошедший магнитную сепарацию и освобожденный от негабаритов и мелких фракций путем просеивания, например грохотами (- 500 мм) и (- 50 мм), загружается в бункер 2, откуда в виде монослоя подается на конвейер 1. Блок системы распознавания 4 анализирует неоднородность на ленте и посредством ультразвуковых или лазерных 3-D сканеров распознает формы, размеры и объем сортируемых предметов, а спектрометрические лазеры определяют их химический состав. Последнее позволяет отличить пластиковую пленку от макулатуры и тряпья. Этот участок оснащается ультрафиолетовым освещением для интенсивного обеззараживания разлагающихся пищевых остатков, а предметы метятся принтером 3 флуоресцентными красителями, например, желтого цвета, знаками соответственно в виде линий, окружностей и торов. Манипулятор 5 с детекторами линейных меток желтого цвета захватывает пленку шипами 7, другие манипуляторы 5 с шипами 8, но с детекторами, опознающими круглые метки, захватывают макулатуру, третьи манипуляторы 5 с детекторами меток в виде тора захватывают тряпье шипами 9.
Распознавание других пластиковых предметов осуществляется по 3-D образам их моделей и химическому составу, определяемому спектрометрами, в частности, путем анализа отраженного инфракрасного спектра лазерного излучения. Так, например, распознавание емкостей из полихлорвинилового пластика от полиэтилентерефталатов, цветного и бесцветного производится путем сравнения, в частности, 3-D образов их моделей или их характерных частей, например горлышек или донцев, которые в процессе уплотнений подвержены наименьшим деформациям. По данным спектрометрического анализа производится окончательное распознавание пластикового предметов, и они помечаются, например, маркирующими лазерами знаками, составленными из лунок оплавлений, в виде соответственно линий, кругов, торов и других фигур. Их распознавание и захват осуществляются детекторами этих фигур из знаков лунок оплавлений, другими манипуляторами 5 с шипами 8 и 9.
Блок 4 оснащен детекторами металлов, основанными, например, на рентгено-флуоресцентном анализе (РФА). Посредством лазерной спектрометрии вначале определяют наличие кабельной оболочки, затем сам металл. Принтер 3 окрашивает алюминиевые кабели белыми, а медные кабели красными цветами видимого оптического диапазона. Манипуляторы 5 с шипами 7, оснащенные детекторами кода указанных цветов, захватывают провода и помещают их в соответствующие контейнеры 11. Также РФА-сканеры определяют в мусоре алюминиевую тару, которую принтер 3 маркирует посредством маркирующего лазера метками зеленого цвета, а их захват производится манипуляторами 5 с шипами 9. РФА-сканеры используют для определения других цветных металлов и сплавов. Эти предметы окрашиваются лазерным принтером 3 в метки различного цвета и будут захвачены манипуляторами 5 с шипами 8, оснащенными детекторами соответствующих цветов побежалости.
Твердые пищевые остатки, стеклобой и мелкие предметы из цветных металлов направляются конвейером 1 на, например, вибростолы, где отделяются друг от друга и утилизируются соответствующим образом. Фракция, содержащая цветные металлы, может быть направлена на флотационное или гравитационное разделение.
Ввиду того что при разгрузке из бункера 2 под большими предметами могут скрываться меньшие, в частности различные пластиковые и металлические предметы, для качественной сортировки мусора после первой группы манипуляторов с шипами 7, 8 и 9 может устанавливаться дополнительный блок 4 системы распознавания предметов с принтером 3, который действует вышеописанным образом.
Код меток может быть представлен в виде фигур разного цвета и форм, нанесенных принтерами или лазерами, либо выполнен в виде знаков из лунок оплавлений, нанесенных лазерами, либо в виде проколов или углублений, нанесенных пуансонами. Соответственно и сканеры манипуляторов 5 должны быть выполнены с возможность считывания соответствующих кодированных меток.
Патроны 6 могут быть выполнены в виде цанговых или кулачковых зажимов для фиксации в них сменных шипов 7, 8 или 9.
Для увеличения надежности захвата предметов метки наносятся на области предметов, которые удобны для их захвата шипами, например в геометрические центры, а действия патронов 6 направлены на эти участки предметов. Для этого система опознания может быть оснащена программой расчета, например, центра 3-D модели.
Использование захватов с внедряющимися шипами в сортируемые предметы позволяет ускорить процесс захвата, так как исключается время, затрачиваемое на анализ тактильного действия руки робота.
Использование предлагаемого изобретения позволит увеличить производительность работы сортировочного устройства, уменьшить его стоимость и улучшить санитарные условия труда обслуживающего персонала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сортировки отходов | 2022 |
|
RU2806224C1 |
| Устройство для предварительной сортировки бытовых отходов | 2017 |
|
RU2651849C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ПРЕДМЕТОВ | 2009 |
|
RU2423192C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПО СОРТИРОВКЕ ИСПОЛЬЗОВАННОЙ ТАРЫ | 2021 |
|
RU2782408C1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
| Интеллектуальная система роботизированной сортировки хаотично расположенных объектов | 2022 |
|
RU2813958C1 |
| КОМПЛЕКС ПЕРЕРАБОТКИ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ С АВТОМАТИЗИРОВАННОЙ СОРТИРОВКОЙ НЕОРГАНИЧЕСКОЙ ЧАСТИ И ПЛАЗМЕННОЙ ГАЗИФИКАЦИЕЙ ОРГАНИЧЕСКОГО ОСТАТКА | 2019 |
|
RU2731729C1 |
| Программно-аппаратный комплекс для управления автономным мобильным роботом-погрузчиком | 2024 |
|
RU2825022C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОБРАБОТКИ БЮЛЛЕТЕНЕЙ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СКАНЕР ИЗБИРАТЕЛЬНЫХ БЮЛЛЕТЕНЕЙ | 1999 |
|
RU2172981C2 |
| СПОСОБ ОПТИМИЗАЦИИ РОБОТИЗИРОВАННОЙ СОРТИРОВКИ ТКО ПУТЁМ ДИНАМИЧЕСКОГО ПЛАНИРОВАНИЯ ПЕРЕМЕЩЕНИЙ РОБОТА-СОРТИРОВЩИКА | 2020 |
|
RU2755876C1 |
Способ сортировки мусора включает захват предметов с конвейера манипуляторами, которые управляются системами распознавания предметов, содержащими устройства сканирования, спектрометрирования и детектирования сортируемых предметов, путем сравнения их данных с образами в компьютерном программном обеспечении. Системы распознавания предметов содержат маркирующие устройства, которые наносят кодированные метки на сортируемые предметы, а захват предметов манипуляторами осуществляют с помощью детекторов кода меток. 2 з.п. ф-лы, 1 ил.
1. Способ сортировки мусора, включающий захват предметов с конвейера манипуляторами, управляемыми системами распознавания предметов, содержащими устройства для сканирования, спектрометрирования и детектирования сортируемых предметов, путем сравнения их данных с образами в компьютерном программном обеспечении, отличающийся тем, что системы распознавания предметов содержат маркирующие устройства, которые наносят кодированные метки на сортируемые предметы, а захват манипуляторами предметов осуществляется с помощью детекторов кода этих меток.
2. Способ сортировки мусора по п. 1, отличающийся тем, что конвейер освещается ультрафиолетовыми фонарями, а метки на предметах окрашиваются флуоресцентными красителями.
3. Способ сортировки мусора по п. 1, отличающийся тем, что компьютерное программное обеспечение оснащено образами 3-D моделей частей мусорных предметов, наиболее стойких к деформированию.
| СПОСОБ ВЫБОРА ФИЗИЧЕСКИХ ОБЪЕКТОВ В РОБОТЕХНИЧЕСКОЙ СИСТЕМЕ | 2011 |
|
RU2566226C2 |
| RU 22001814 C2, 10.02.2002 | |||
| US 5229693 A, 20.07.1993. | |||

