Изобретение относится к исполнительному устройству, раскрытому в п.1 формулы изобретения.
Изобретение описано на основе линейного исполнительного устройства, содержащего линейный подвижный трубчатый исполнительный элемент. Линейное исполнительное устройство содержит электродвигатель, который посредством передачи приводит в движение ходовой винт. На ходовом винте помещена ходовая гайка, к которой одним концом прикреплен трубчатый исполнительный элемент. Другой конец трубчатой секции посредством переднего крепежного элемента соединен с подвижным элементом конструкции, на которой установлено исполнительное устройство, а при помощи заднего крепежного элемента исполнительное устройство прикреплено к неподвижной части конструкции, или наоборот. Во время установки гайка перемещается по ходовому винту либо в направлении наружу, либо внутрь, в зависимости от направления вращения, таким образом, трубчатая секция перемещается наружу или втягивается внутрь в аксиальном направлении подобно поршневому штоку телескопического цилиндра.
Положение трубчатой секции обычно определяют посредством подсчета числа оборотов ходового винта. Число оборотов, умноженное на шаг резьбы винта, определяет положение трубчатой секции. Абсолютное определение положения может осуществляться посредством поворотного потенциометра, который приводится в движение электродвигателем посредством зубчатой передачи. Если передаточное число известно, можно вычислить число оборотов ходового винта. Более распространенный способ определения положения заключается в использовании магнитного энкодера. Магнитный энкодер содержит магнитное ярмо с несколькими полюсами. Эти полюса активируют герконовый переключатель или датчик Холла при каждом прохождении одного из полюсов около такого переключателя (или, альтернативно, около датчика Холла), через который при этом проходит электрический сигнал.
Герконовые переключатели подробно описаны в патенте US 2264746 (заявитель - Эллвуд (Ellwood)). Герконовый переключатель представляет собой электромеханический компонент, в котором контактная группа, состоящая из двух металлических контактов, под действием магнитного поля образует электрическое соединение. Поскольку указанный компонент является компонентом с подвижными элементами, его использование накладывает ограничение на физические размеры, выбор материалов, срок службы и быстродействие.
В патентном документе US 7003828 B2 описана исполнительная система с устройством для определения положения, состоящим из генератора импульсов в виде герконового переключателя, на который воздействует магнитное ярмо. В этой системе существуют ограничения, описанные в столбце 3, строка 61 - столбце 4, строка 3. Недостаток такой системы заключается в том, что инерционность механической системы ведет к появлению незарегистрированных счетных шагов. Этот недостаток возникает по той причине, что счетное устройство зависит от активации кнопок управления, во-первых, для индикации направления перемещения, если счетчик считает в прямом или обратном направлении, а также для того, чтобы, счетчик, по существу, регистрировал и считал срабатывания герконового переключателя. Так как ошибка с течением времени накапливается, вводится функция сброса цикла счета в четко определенной позиции, а именно, когда поршень исполнительного устройства полностью втянут.
В отличие от герконового переключателя датчик Холла является немеханическим компонентом, выходное напряжение которого меняется в зависимости от напряженности приложенного магнитного поля. Различают датчики Холла, которые реагируют непрерывным изменением напряжения пропорционально напряженности приложенного магнитного поля, и переключатели на датчике Холла, которые выдают цифровой сигнал в зависимости от того, приложено или не приложено магнитное поле заданной напряженности. Обычно это проявляется как скачкообразное изменение уровня напряжения на выходе элемента, от низкого значения - около 0 вольт до высокого значения, близкого к напряжению питания элемента. Причем, указанное напряжение не принимает других значений, кроме двух крайних. Хотя уровень сигнала на выходе описан в данном случае для системы с общим истоком, этот выход может представлять собой выход с открытым коллектором, т.е. систему с открытым стоком. Он служит не для выдачи выходного напряжения, а в качестве электронного контакта, имеющего соединение с отрицательным полюсом напряжения питания. При оснащении внешними компонентами выходной сигнал может быть рассчитан с учетом согласования интерфейса с микропроцессором или другим счетным устройством. Внутри переключатель на датчике Холла снабжен средствами, которые противодействуют дребезгу благодаря определению соответствующего гистерезиса для переходных состояний. Благодаря этой мере отпадает необходимость калибровки, так как число ошибочных счетных импульсов минимизируется. В то же самое время датчик Холла является компонентом, полностью основанным на полупроводниковой технике с вытекающими отсюда преимуществами в отношении размера, стоимости и срока службы. Дополнительную информацию по датчикам Холла можно получить от производителей этих устройств, например от компании Micromagnetics.
Исходя из вышеизложенного, каждый раз, когда магнитный полюс проходит мимо герконового переключателя или датчика Холла, инициируется сигнал. Таким образом, если применяют магнитный энкодер, содержащий магнитное кольцо с четырьмя полюсами, то положение определяется для каждой четверти оборота ходового винта. При использовании двух датчиков Холла положение определяется восемь раз за один оборот.
В качестве альтернативы магнитному энкодеру могут использовать оптический датчик положения, который работает аналогичным образом, а именно содержит вращающийся диск со сквозными отверстиями и источник света. Если отверстие проходит мимо источника света, световой луч проходит через отверстие к фотоэлементу, который при этом инициирует сигнал. На основании сигналов посредством микропроцессора в управляющем устройстве вычисляется положение.
Из патентного документа US 5224429 известна исполнительная система, в которой для определения положения по оборотам двигателя используются оптические датчики (Фиг.6). Однако в этом документе не описано, каким образом управляющее устройство определяет направление вращения ходового винта. В результате возможная регулировка вручную может привести к неправильной индикации положения. Однако уровень цен на оптические датчики по сравнению с альтернативными магнитными датчиками делает это решение менее привлекательным с учетом большой ценовой конкуренции на рынке исполнительных устройств.
Предпочтительным является абсолютное определение положения, а использование датчиков Холла и герконовых переключателей отчасти обусловлено их стоимостью и отчасти надежностью. Потенциометры относительно дороги, кроме того, они подвержены механическому износу. Этот износ проявляется в виде полного или частичного прерывания соединения между скользящим контактом и резистивным участком потенциометра. Со временем износ может стать причиной изменения линейности сопротивления потенциометра в пределах всего динамического диапазона, что может повлиять на точность определения положения. Кроме того, невозможно полностью использовать участки регулировки на концах. Еще один менее заметный аспект заключается в том, что проверка надежности потенциометра в исполнительном устройстве занимает примерно один год. Это означает, что просто заменить потенциометр потенциометром другого типа невозможно. Если поставщик меняет конструкцию потенциометра, испытания приходится выполнять повторно.
Задачей изобретения является решение описанной проблемы, то есть обеспечение возможности абсолютного позиционирования с устранением недостатков, присущих поворотным потенциометрам.
В соответствии с изобретением это достигается благодаря обеспечению исполнительного устройства, раскрытого в п.1 формулы изобретения, причем абсолютное определение положения может осуществляться посредством датчиков положения, например датчиков Холла или герконовых переключателей. Сначала выполняют процедуру инициализации, в ходе которой гайку или ходовой винт перемещают из первой заданной точки на ходовом винте или гайке ко второй заданной точке на ходовом винте или гайке. Количество возникающих при этом сигналов от инкрементных датчиков положения регистрируют как измеренное значение длины хода. Затем определяют положение относительно этого значения, то есть положение определяется дробью, числитель которой представляет текущее количество сигналов, а знаменатель - общее количество сигналов по длине хода. Для регистрации сигналов важно, чтобы управляющее устройство было активно перед, после и, разумеется, во время работы двигателя. Таким образом, управляющее устройство постоянно должно быть под напряжением и оснащено резервным батарейным питанием, чтобы гарантировать, что индикация положения будет продолжаться в случае прерывания питания в электрической сети. Этим самым также гарантируется, что индикация положения сохранится даже при регулировке вручную. Альтернативно, микропроцессор может сохранять данные в памяти, благодаря чему данные не будут потеряны в случае отсутствия напряжения питания. Возможная ручная регулировка может в этом случае привести к ошибкам счета.
Разумеется, точное линейное перемещение поршневого штока исполнительного устройства, выраженное в подсчитанных импульсах, может быть просто преобразовано в точное измеренное значение посредством умножения количества импульсов на коэффициент, выражающий соотношение шага резьбы ходового винта с количеством оборотов.
Согласно изобретению определение положения должно выражаться тем же способом, что и при использовании потенциометра. При использовании потенциометра положение гайки по длине хода винта пропорционально соотношению между напряжением на потенциометре и уровнем напряжения на скользящем контакте потенциометра. Таким же образом положение ходовой гайки выражается количеством импульсов, подсчитанных начиная от известной точки, предпочтительно механического концевого ограничителя. При соотношении этого количества с предварительно подсчитанным количеством импульсов между двумя положениями, как правило двумя концевыми ограничителями, получается выражение, описывающее положение ходового винта относительно длины хода, отображающее расстояние перемещения исполнительного элемента. На основании подсчитанного количества импульсов, соотнесенного с количеством импульсов, соответствующих желаемой длине хода исполнительного элемента, указанная дробь, полученная для определения хода исполнительного элемента, относительно соответствует длине хода исполнительного устройства. Следовательно, эта дробь может быть использована для получения выходного напряжения, которое является ее пропорциональным выражением. Указанное выражение может быть получено непосредственно при использовании цифроаналогового преобразователя (ЦАП), преобразующего подсчитанное отношение в относительный уровень напряжения. Так как цифроаналоговые преобразователи требуют больших затрат, в рамках настоящего изобретения найдено более дешевое решение, которое описывается на примере реализации.
В данном примере длина хода обозначена буквой S, а перемещение ходовой гайки от физического концевого ограничителя обозначена буквой L, что выражается в микропроцессоре посредством количества импульсов, подсчитанного при перемещении гайки от физического концевого ограничителя. Вначале микропроцессор оценивает выходную величину как высокую и использует внутреннюю тактовую частоту как сигнал запуска счетчика, увеличивая количество подсчитанных импульсов при каждом запускающем импульсе. Постоянно осуществляется сравнение с числом L. Если достигнуто число L, выходная величина оценивается как низкая и счет продолжается до достижения числа S, после чего процедура повторяется. В качестве выражения для положения ходовой гайки по длине хода теперь может быть получен импульсно-модулированный сигнал, причем коэффициент заполнения непосредственно выражает положение гайки в пропорции к полной длине хода. Этот сигнал пропускается через фильтр нижних частот, чтобы получить среднее значение и выдать его в виде постоянного напряжения. Практические испытания показали, что работа внешнего устройства не зависит от того, какое решение использовано в исполнительном устройстве - с потенциометром или решение согласно изобретению. При этом предлагаемое устройство и дешевле, и прочнее. В случае необходимости замены неисправного элемента, в котором применяется потенциометр, новым элементом, в котором применяется решение согласно изобретению, будет обеспечиваться полная совместимость.
То, что в данном примере выходной параметр аналогичен выходному параметру при использовании потенциометра, то есть постоянному напряжению, не исключает возможности иного выражения для определения положения. Очевидно, что интерфейс между нескольким микропроцессорами может использовать дробь, выражающую положение относительно длины хода или в виде широтно-модулированного сигнала (PVM)). Для обеспечения коммуникации между микропроцессором и прочим оборудованием также могут использовать стандартный интерфейс, например, подобный RS232. Также потребуется заранее согласовать протокол передачи и приема данных. Возможно также использование других интерфейсов на основе световой и оптической связи. Допускается использование интерфейсов, часто применяемых в промышленном оборудовании, в котором ток или напряжение преобразуют в частотно-модулированный сигнал (Имеется в виду применение преобразователей напряжение-частота).
В известных исполнительных устройствах определение положения и длины хода осуществляется таким образом, что концевые выключатели монтируют на участке печатной платы с рядом отверстий, причем концевые выключатели могут монтировать с расчетом на конкретные технические условия. Из патентных документов DE 8903603 (заявитель - Деверт (Dewert)) и WO 02/102205 А1 (заявитель - Симозис (Cimosys)) известны исполнительные устройства со съемными концевыми ограничителями. В любом случае, регулировать положение и длину перемещения исполнительного элемента весьма сложно. Тем не менее, при помощи данного изобретения в любой момент времени могут сравнительно просто задать другую длину хода и его положение, для чего необходимо лишь осуществить новую процедуру инициализации с учетом новых технических условий.
Ниже предлагаемое исполнительное устройство описано более подробно со ссылками на прилагаемые чертежи, на которых:
на Фиг.1 показан продольный разрез предлагаемого исполнительного устройства;
на Фиг.2 показана часть области около червячного привода;
на Фиг.3 показаны виртуальные концевые ограничители;
на Фиг.4 показано упрощенное схематическое изображение системы с датчиками Холла;
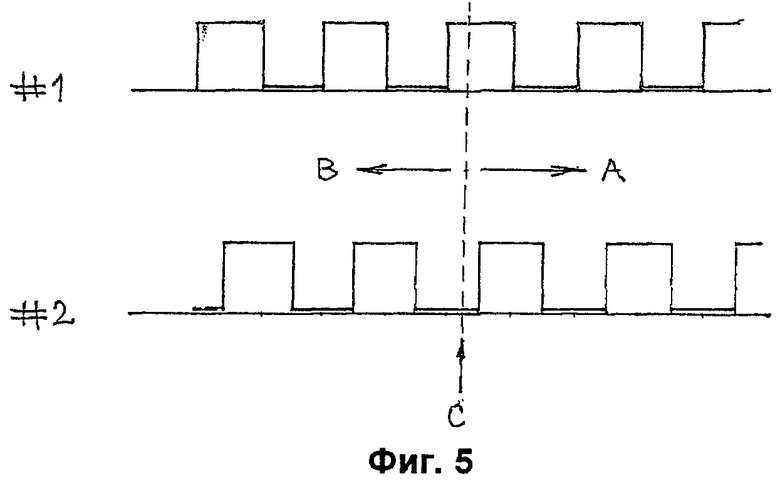
на Фиг.5 показана последовательность импульсов в системе с датчиками Холла;
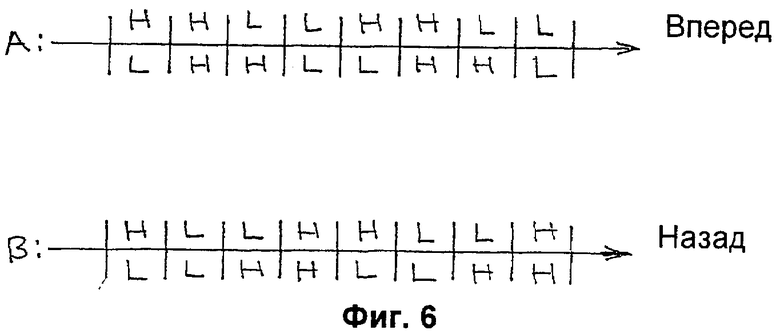
на Фиг.6 показан код Грея в зависимости от направления перемещения; и
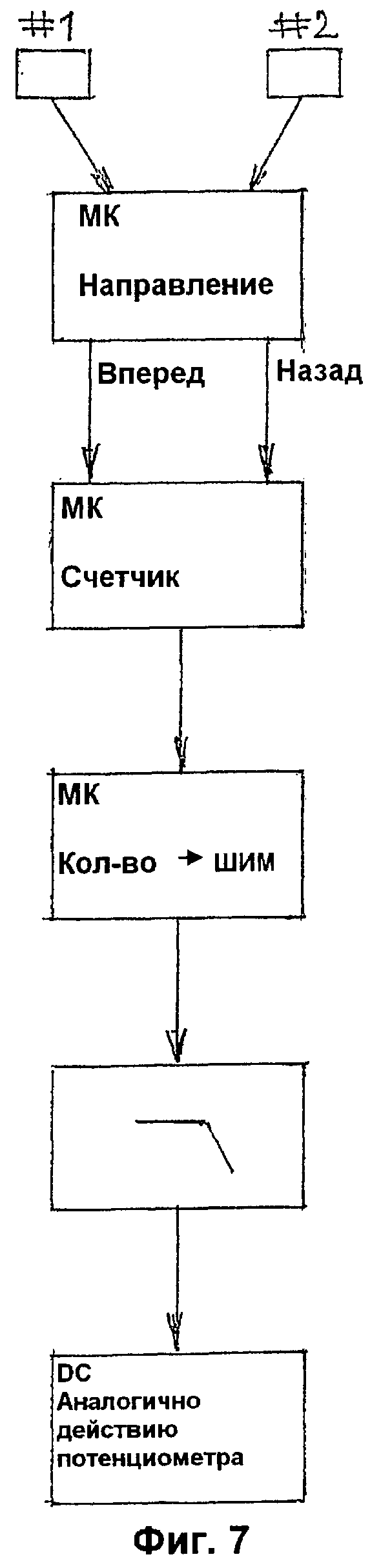
на Фиг.7 показана структурная схема системы с датчиками.
Как показано на фиг.1, основными компонентами исполнительного устройства являются корпус 1, состоящий из двух частей, реверсивный электродвигатель 2 постоянного тока, который посредством червячного привода 3 приводит в движение ходовой винт 4 с ходовой гайкой 5, к которой прикреплен трубчатый исполнительный шток 6 (внутренняя труба), окруженный наружной трубой 7. Общая конструкция исполнительного устройства подобного типа описана в патентном документе WO 02/29284, на который сделана ссылка.
Как показано на фиг.2, соединительный элемент 8 червячного колеса снабжен магнитным ярмом 9 с четырьмя полюсами для определения положения исполнительного штока 6. Для этого на небольшой печатной плате 10 смонтированы два датчика 11 Холла, из которых виден только один датчик, в то время как другой датчик закрыт соединительной деталью 8. При вращении магнитного ярма датчики Холла активируются тогда, когда один из полюсов ярма проходит мимо датчиков, благодаря чему выдается сигнал в управляющее устройство, которое посредством микропроцессора определяет положение исполнительного штока 6 при вращении, направление его движения и шаг резьбы ходового винта. Так как два датчика Холла помещены под углом, можно определить направление вращения ходового винта (квадратурное детектирование) и при этом определить, должны ли сигналы суммироваться или вычитаться, в зависимости от направления вращения винта, а также перемещается ли исполнительный шток 6 наружу или втягивается.
Например, если необходима длина хода от точки А до точки В, выполняют процедуру инициализации, перемещая ходовую гайку в положение А. Затем ходовую гайку перемещают в положение В, при этом в микропроцессоре подсчитывается и регистрируется количество сигналов от датчиков Холла. Позиции А и В определяются как концевые ограничители, а случайное положение ходовой гайки, а вместе с тем положение исполнительного штока между этими двумя концевыми ограничителями определяется относительно общего количества сигналов, зарегистрированных по длине хода. Обычно в качестве калибровочных крайних точек используют физические концевые ограничители, но в их качестве могут выступать и другие положения гайки по длине ходового винта.
На Фиг.3 виртуальная длина хода S показана как расстояние между двумя виртуальными концевыми ограничителями А и В, соответствующими точкам V1 и V2, показанным относительно положения гайки на ходовом винте. Х1 и Х2 представляют собой физические концевые ограничители, находящиеся от виртуальных концевых ограничителей на расстояниях K и L.
Как показано на Фиг.4, в случае использования магнитного кольца с четырьмя полюсами (как в рассматриваемом случае), два датчика Холла (#1, #2) расположены под углом примерно 45 градусов. Особенность передачи сигналов от датчиков Холла при данном взаимном положении состоит в том, что удовлетворяются требования кода Грея, то есть каждый раз меняется только один сигнал или бит. Следовательно, местоположение датчиков следует выбирать на основе этого критерия, устанавливая их под определенным углом относительно друг друга. Итак, импульсная последовательность от системы датчиков может выглядеть примерно так, как показано на Фиг.5, на которой два датчика Холла обозначены соответственно как #1 и #2. Стрелка (С) показывает случайное положение гайки по длине хода винта. Если стрелка перемещается в направлении А, то импульсная последовательность при перемещении соответствует последовательности А. Соответственно импульсная последовательность В соответствует перемещению стрелки в направлении В. На Фиг.6 те же самые импульсные последовательности показаны в зависимости от направления перемещения. Из этого чертежа видно, что две импульсные последовательности отличаются друг от друга, следовательно, они могут использоваться как для определения перемещения, так и для детектирования направления перемещения. Как показано на Фиг.7, в микропроцессор (МК) поступают сигналы от датчиков Холла. Таким образом получается результат в виде относительного количества импульсов, соотнесенного с полной длиной хода. Это количество преобразуется в широтно-модулированный сигнал ШИМ (PVM), который усредняется и выдается как относительный сигнал постоянного тока, что точно соответствует функционированию потенциометра. При необходимости во внешнее устройство могут передавать любой из промежуточных сигналов.
Выше описано исполнительное устройство с трубчатым поршневым штоком, однако, как указано выше, изобретение также относится к исполнительным устройствам, в которых ходовая гайка сконструирована как активный элемент, ср. патентный документ DK 174457 (заявитель - компания Линак А/С (Linak A/S)), или в которых ходовой винт перемещается в аксиальном направлении, ср. патентный документ WO 02/24034 (заявитель - компания Симозис (Cimosys)), вариант реализации, показанный на Фиг.1-4.
Таким образом, настоящим изобретением предлагается линейное исполнительное устройство, в котором абсолютное определение положения осуществляется посредством инкрементных датчиков, причем предусмотрена возможность одновременного определения длины хода и его положения, а также возможность, их изменения в любое время. Это означает, что на основе физического исполнительного устройства могут изготовить виртуальное исполнительное устройство с измененными параметрами в динамической области. Это может выражаться посредством координаты отвода ходовой гайки, в качестве которой может для всех целей и назначений выступать любое положение в пределах длины хода физического исполнительного устройства. Следовательно, это положение будет играть роль концевого ограничителя, но не физического, а электронного, обеспечиваемого посредством микропроцессора и программного обеспечения. Таким образом, требуемое максимальное расстояние перемещения ходовой гайки от одного концевого ограничителя - физического или виртуального - выступает в качестве второго виртуального концевого ограничителя. Другая длина хода винта может быть сохранена в памяти и использоваться как предварительная установка. Это означает, что одно и то же физическое исполнительное устройство могут применять для различных целей, и в ходе инициализации могут простым способом осуществить предварительное программирование, чтобы в полной мере выполнить настройку в соответствии с задачами области применения. С точки зрения логистики производителю исполнительных устройств предпочтительно иметь меньше различных номенклатурных единиц, что позволяет достичь более эффективного производства путем изготовления стандартных деталей в больших объемах. Для пользователя это означает надежность поставки новых деталей при необходимости замены неисправных. При замене неисправного исполнительного устройства на новое новое устройство независимо от длины его хода будет функционировать, как и предыдущее устройство, до тех пор, пока его длина хода будет не меньше, чем длина хода виртуального исполнительного устройства, или пока механизм данной конструкции будет препятствовать перемещению ходовой гайки в положение, в котором она находится вплотную к физическим концевым ограничителям, и, таким образом, обеспечивать дополнительную экономию в аспекте быстрого технического обслуживания и ремонта. Во время работы не возникает необходимости в калибровке положения ходовой гайки, так как датчики и микропроцессор всегда активны. Тем не менее, имеет смысл контролировать точность посредством сравнения с четко определенными позициями и при необходимости осуществлять калибровку. Если в качестве калибровочных отметок используют механические концевые ограничители, для защиты механических деталей исполнительных устройств следует учитывать, что эти ограничители обладают упругостью. В зависимости от скорости, с которой ходовая гайка перемещается к концевому ограничителю, могут быть получены различные счетные значения. Тем не менее, это можно компенсировать посредством подсчета количества импульсов, возникающих при движении ходового винта в противоположном направлении после отключения двигателя в результате действия защиты от превышения тока, или посредством выполнения дополнительной калибровки после того, как ходовая гайка переместилась к концевому ограничителю. Физические концевые ограничители, например концевые выключатели, также могут стать причиной ошибки по количеству счетных шагов по длине хода, так как из-за инерции системы после отключения тока двигателя она продолжает двигаться. Если сигнал от концевого выключателя также передается в микропроцессор и учитывается при вычислении положения, можно вычислить величину ошибки. Таким образом, управление можно отрегулировать так, чтобы незначительные ошибки во внимание не принимались, а большие ошибки компенсировались посредством перемещения гайки немного назад.
Хотя при неблагоприятных обстоятельствах при использовании рассматриваемого решения могут возникать ошибки счета, точность позиционирования при его применении намного выше точности, которая достигается в случае использования обычных потенциометров. По этой причине решение согласно изобретению, принимая во внимания ряд его преимуществ, оказывается гораздо лучшим.
Хотя в данном случае в качестве датчиков положения описаны датчики Холла, также не исключено использование и других технических решений с целью определения количества вращений ходового винта.
Используемый в описании термин «микропроцессор» охватывает любое устройство, предусматривающее возможность обработки данных применительно к описываемому процессу, которую осуществляет вышеописанный микропроцессор. Этим устройством может быть, например, контроллер, контроллер PIC, контроллер AVR, процессор с сокращенным набором команд (RISC), конечный автомат, основанный на аппаратном обеспечении, специализированная интегральная микросхема (ASIC) и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА (ВАРИАНТЫ) | 2014 |
|
RU2678366C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ЗАКРЫВАЮЩИЙ ПРИВОД И ПУСКОВОЙ ПРИВОД, РАБОТАЮЩИЕ ОТ ОДНОГО ПОВОРАЧИВАЕМОГО ВЫХОДА | 2014 |
|
RU2650585C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2690895C2 |
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА (ВАРИАНТЫ) И МЕХАНИЧЕСКАЯ СОЕДИНИТЕЛЬНАЯ СИСТЕМА ДЛЯ РАЗЪЕМНОГО СОЕДИНЕНИЯ СДВОЕННЫХ ПОВОРОТНЫХ ПРИВОДНЫХ ВАЛОВ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2676439C2 |
| ЛИНЕЙНЫЙ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПИТАНИЕМ | 2014 |
|
RU2677531C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ | 2014 |
|
RU2653625C2 |
| МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, ПРИВОДИМЫЕ В ДЕЙСТВИЕ ДВИГАТЕЛЕМ, С КОНСТРУКЦИЯМИ ИНДИКАЦИИ СТАТУСА | 2014 |
|
RU2651066C2 |
| РАЗЪЕМНАЯ КОНСТРУКЦИЯ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2665132C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2007 |
|
RU2416863C2 |
| Весоизмерительное устройство | 1986 |
|
SU1315824A1 |


Изобретение относится к электротехнике и может быть использовано в машиностроении для абсолютного определения положения в тех областях применения, где раньше использовались только поворотные потенциометры, а также при необходимости для одновременного определения длины хода, положения, предусматривая возможность немедленного изменения в любое время. Технический результат состоит в расширении эксплуатационных возможностей. Линейное исполнительное устройство содержит ходовую гайку и ходовой винт, которые выполнены с возможностью аксиального перемещения относительно друг друга между первой и второй точками, определяющими длину хода при приведение в движение соответствующего из указанных элементов посредством передачи. Устройство также содержит инкрементные датчики положения, в частности, по меньшей мере два датчика Холла или герконовых переключателя, предназначенных для определения положения. Для определения положения выполняют процедуру инициализации, предусматривающую смещение гайки или ходового винта из первой точки на ходовом винте или гайке во вторую точку на ходовом винте или гайке. Регистрируют количество импульсов от инкрементных датчиков положения как показатель длины хода. Затем по данному количеству импульсов определяют положение. Управляющее устройство активно до начала, во время и после завершения работы двигателя. 8 з.п. ф-лы, 7 ил.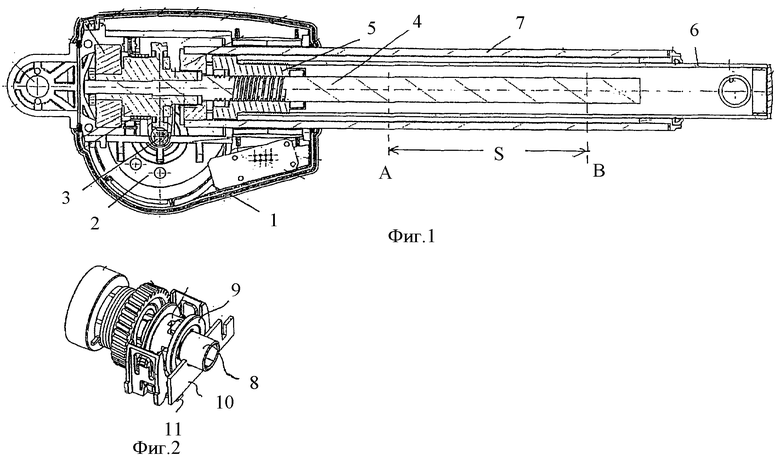
1. Линейное исполнительное устройство, содержащее
электродвигатель; средство передачи; ходовой винт; ходовую гайку, причем ходовая гайка и ходовой винт выполнены с возможностью перемещения относительно друг друга в аксиальном направлении между первой и второй точками, определяющими длину хода, при приведении в движение соответствующего из двух указанных элементов, ходового винта или ходовой гайки, посредством средства передачи; инкрементные датчики положения, например по меньшей мере два датчика Холла или герконовых переключателя для определения направления вращения и положения ходовой гайки или ходового винта; управляющее устройство, содержащее микропроцессор для приема сигналов от датчиков положения и определения на их основании положения, и блок питания;
отличающееся тем, что
первоначально выполняется процедура инициализации, в ходе которой гайка или ходовой винт перемещается из первой точки на ходовом винте или гайке во вторую точку на ходовом винте или гайке, количество импульсов от инкрементных датчиков положения регистрируется как измеренное значение длины хода, а затем определяется положение относительно этого значения, а также тем, что управляющее устройство активно перед, во время и после работы двигателя.
2. Устройство по п.1, отличающееся тем, что, по меньшей мере одна точка из указанных первой или второй точки представляет собой концевой ограничитель.
3. Устройство по п.2, отличающееся тем, что концевой ограничитель представляет собой концевой выключатель.
4. Устройство по п.2, отличающееся тем, что концевой ограничитель представляет собой механический концевой ограничитель.
5. Устройство по п.1, отличающееся тем, что положение ходовой гайки определяется по сигналу тока.
6. Устройство по п.1, отличающееся тем, что положение ходовой гайки определяется по сигналу напряжения.
7. Устройство по п.1, отличающееся тем, что положение ходовой гайки определяется по сигналу в виде светового луча.
8. Устройство по любому из пп.5-7, отличающееся тем, что положение ходовой гайки определяется по импульсно-модулированному сигналу.
9. Устройство по любому из пп.5-7, отличающееся тем, что положение ходовой гайки определяется по частотно-модулированному сигналу.
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 0 |
|
SU328972A1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОЛОЖЕНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА, СИСТЕМА БЕСТРАНШЕЙНОГО ПОДЗЕМНОГО БУРЕНИЯ И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ БУРИЛЬНОГО ИНСТРУМЕНТА | 1996 |
|
RU2175368C2 |
| DE 19843431 A1, 25.03.1999 | |||
| ЕР 1612466 А, 04.01.2006 | |||
| US 5053685 А, 01.10.1991. | |||

