Настоящее изобретение относится к исполнительному механизму, заявленному в ограничительной части пункта 1 формулы изобретения.
Для удобства представления материала описание изобретения основывается на случае линейного исполнительного механизма со шпинделем, который через трансмиссию приводится в движение электрическим двигателем, причем исполнительный орган этого исполнительного механизма представляет собой трубчатый шток, перемещаемый ходовой гайкой. Однако подразумевается, что изобретение относится также к поворотным исполнительным механизмам, наподобие, например, описанного в заявке WO 01/17401 А1 от имени Линак А/С.
В исполнительном механизме для временного разъединения с высокоинерционной частью трансмиссии и двигателем используется быстродействующий размыкатель, вследствие чего не имеющий средств самоблокировки исполнительный орган под воздействием прилагаемой нагрузки самопроизвольно отходит в исходное положение или же может быть перемещен вручную. В качестве примера сфер применения быстродействующих размыкателей можно назвать больничные кровати, подъемники для пациентов, а также ворота, двери и окна некоторых типов, и иные конструкции, в которых необходимо или даже жизненно важно иметь возможность мгновенной коррекции положения исполнительного органа.
Исполнительные механизмы с быстродействующим размыкателем известны, например, из описаний изобретений ЕР 685662 В1 и ЕР 577541 В1 от имени Линак А/С. В первой публикации описан быстродействующий размыкатель, в котором два цилиндрических элемента соединены отделяемой пружиной сцепления. Во второй публикации описан быстродействующий размыкатель с двумя коническими зубчатыми колесами, одно из которых может выводиться из зацепления.
При использовании быстродействующих размыкателей, однако, во многих ситуациях существует опасность того, что конструкция, источник нагрузки и, возможно, пациент, перемещаемый с помощью исполнительного механизма, могут получить повреждения в результате столкновения, которое имеет место, когда исполнительный орган ударяется в своем крайнем положении о механический концевой ограничитель. Сила этого удара обусловлена тем, что исполнительный орган под нагрузкой совершает ускоренное движение, которое оканчивается столкновением с более или менее жестким механическим ограничителем.
Однако из публикации WO 98/30816, заявленной Линак А/С, известна несложная конструкция, позволяющая управлять скоростью во время срабатывания быстродействующего размыкателя. В этом быстродействующем размыкателе используется цилиндрическая пружина сцепления, в сжатом состоянии упирающаяся в цилиндрический элемент. Контролируя натяжение пружины, можно в большей или меньшей степени вывести ее из контакта с цилиндрическим элементом и, таким образом, управлять скоростью. Эта конструкция хорошо работает, но громоздка, состоит из многих деталей, и с ее помощью может быть сложно точно управлять скоростью.
Цель настоящего изобретения - предложить исполнительный механизм с упрощенным быстродействующим размыкателем, который позволяет управлять скоростью во время разъединения.
Эта цель достигается в исполнительном механизме, описанном в пункте 1 формулы изобретения. Изобретение основывается на том, что электрический двигатель работает как генератор, если его ротор принудительно приведен в движение. Для этого применены исполнительный орган, двигатель и трансмиссия без средств самоблокировки, так что они могут быть приведены в движение при воздействии нагрузки на исполнительный орган. Для штатной фиксации исполнительного органа в любом желаемом положении в исполнительном механизме предусматривается тормоз. Могут использоваться тормоза различных типов - механические или электрические. При отпускании тормоза подвижные элементы исполнительного механизма приходят в движение, при котором двигатель работает как генератор. Возникающее при этом электрическое напряжение, пропорциональное скорости, используется для управления скоростью исполнительного органа. Это можно сделать различными способами, например посредством тормоза с электроприводом. Наиболее простой способ, однако, при этом заключается в том, чтобы электрически нагрузить двигатель коротким замыканием. Нагрузка может быть постоянной резистивной или же управляться широтно-импульсной модуляцией. Коммутируя нагрузку соответствующим образом, можно получить большую или меньшую скорость. Для задания момента начала торможения может быть предусмотрена небольшая электрическая цепь, которая включает торможение, когда генерируемое напряжение превышает определенный уровень, например порядка 28-34 вольт. Этот предел может разрешаться с помощью транзистора, например полевого. Предполагается, что исполнительный орган приближается к концевому ограничителю с определенной скоростью. Следует отметить, однако, что скорость может варьировать в определенных пределах в зависимости от конкретных условий. Однако в ходе движения возможно также менять скорость, если включить в цепь потенциометр для регулирования напряжения, а вместе с ним и скорости. Особенно мощный эффект торможения достигается если не только нагружать двигатель при определенных условиях по скорости, но еще и подавать на двигатель отрицательное (по отношению к генерируемому) напряжение.
Ниже приводятся более подробные пояснения к изобретению с обращением к прилагаемым чертежам, на которых:
на фиг.1 изображен исполнительный механизм в разрезе;
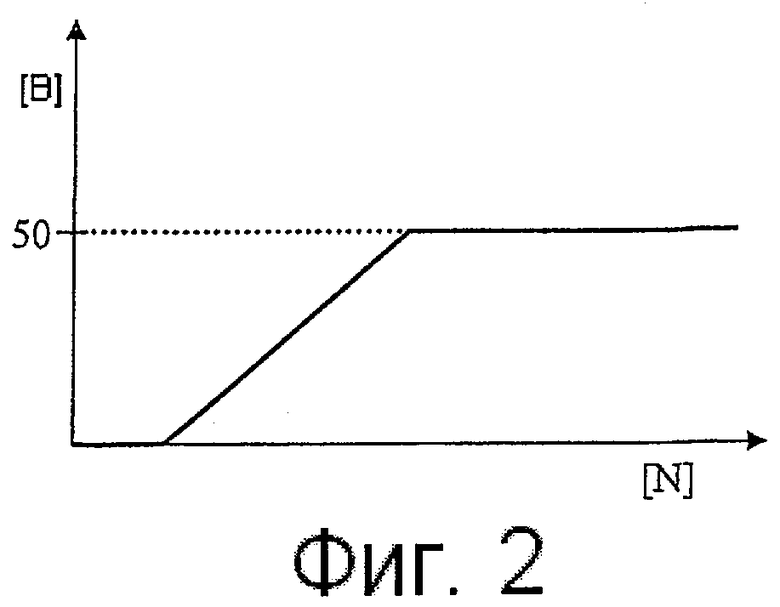
на фиг.2 показана пороговая величина напряжения для торможения двигателем;
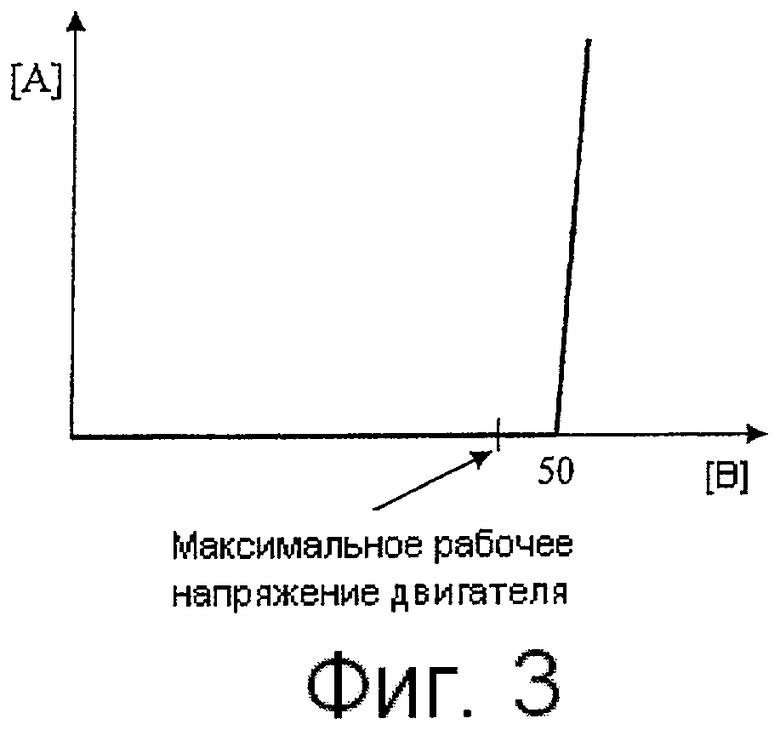
на фиг.3 представлено отношение между номинальным рабочим напряжением и напряжением торможения двигателем в данной системе;
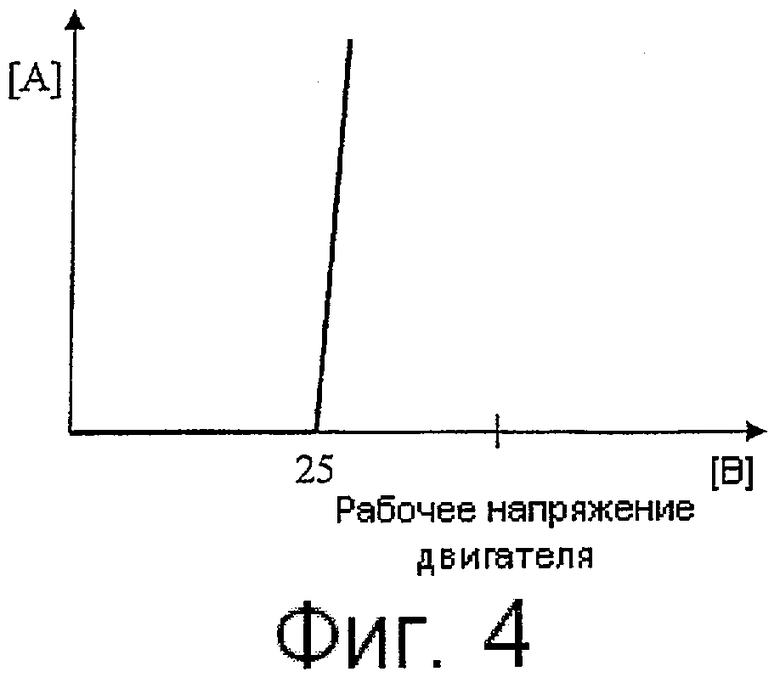
на фиг.4 показана пороговая величина напряжения для торможения двигателем в случае, когда блок управления отключают с помощью реле;
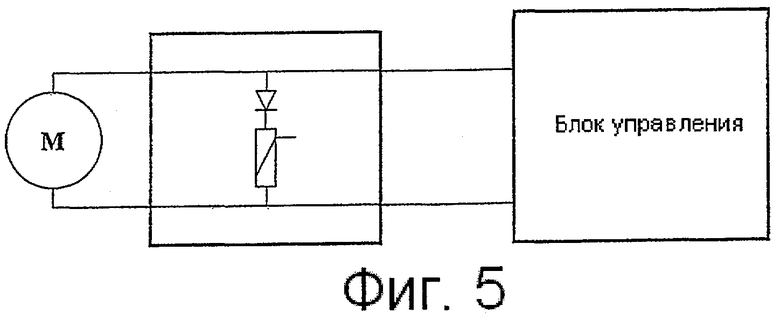
на фиг.5 схематически показана система управления, содержащая исполнительный механизм;
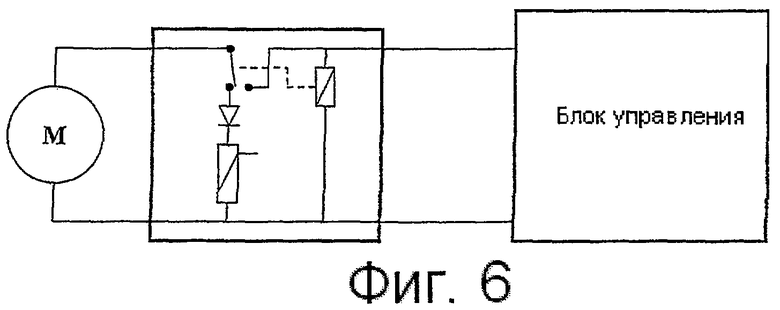
на фиг.6 схематически показана система управления, содержащая исполнительный механизм и дополнительное реле;
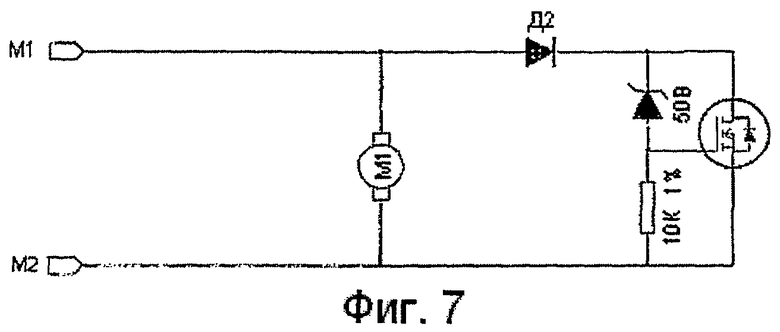
на фиг.7 представлена примерная электрическая схема системы торможения двигателем;
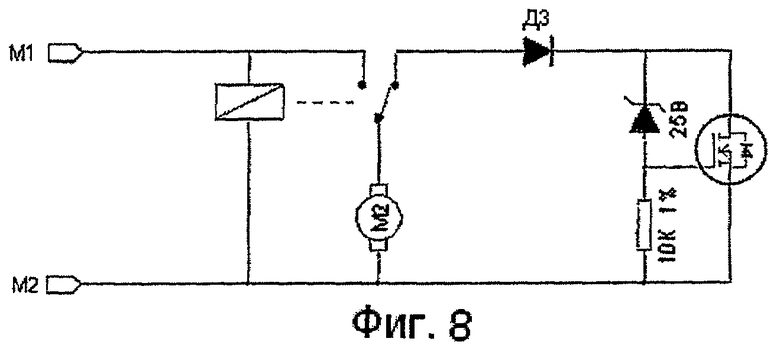
на фиг.8 представлена примерная электрическая схема системы торможения двигателем с дополнительным реле;
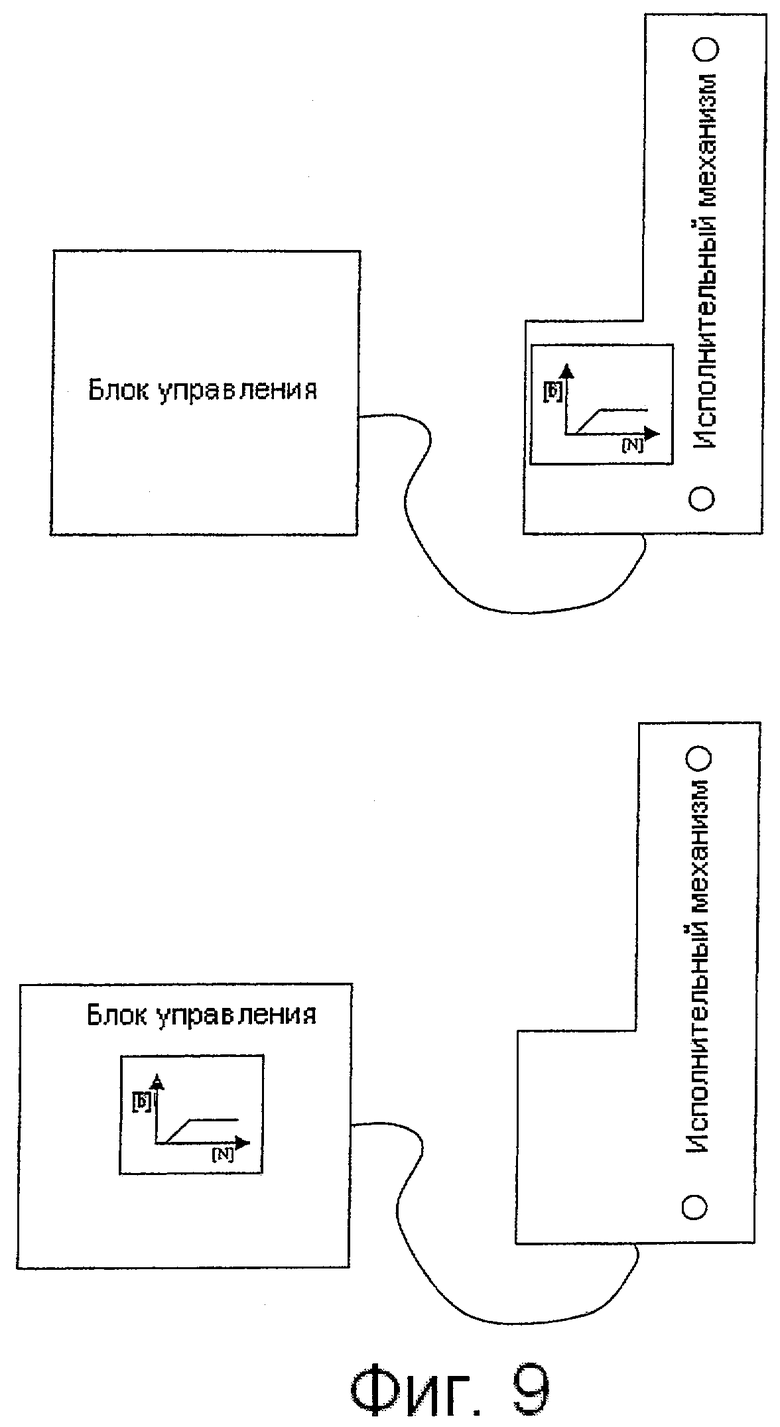
на фиг.9 показаны варианты расположения системы торможения двигателем.
Исполнительный механизм на фиг.1 имеет корпус с реверсивным низковольтным двигателем 1 постоянного тока, который через червячную передачу 2 приводит во вращение шпиндель 3. На шпинделе расположена ходовая гайка 4, на которой закреплен исполнительный орган 6 в форме трубчатого штока с возможностью перемещения вдоль наружной трубки 5, причем один конец указанной наружной трубки встроен в корпус 7. За счет удержания шпинделя от вращения обеспечивается возвратно-поступательное перемещение исполнительного органа в зависимости от направления вращения двигателя.
Двигатель, червячная передача и шпиндель не имеют самоблокировки, а это означает, что нагрузка на исполнительном органе давлением на ходовую гайку приведет во вращение шпиндель, а вместе с ним червячную передачу и ротор двигателя.
Чтобы зафиксировать исполнительный орган в любом желаемом положении, когда подача тока в двигатель прекращается, исполнительный механизм снабжен тормозом 8 в виде цилиндрической пружины, которую можно отпустить при помощи механизма размыкателя. Когда тормоз отпущен, исполнительный орган, как сказано выше, получает возможность свободно перемещаться. При этом ротор двигателя приводится во вращение и начинает работать как генератор, причем с увеличением скорости он генерирует более высокое напряжение. Это напряжение имеет противоположную полярность по отношению к тому напряжению, которое подается на двигатель, чтобы выдвигать исполнительный орган из начального положения. Работа двигателя в качестве генератора используется для управления скоростью исполнительного органа.
Это управление может осуществляться различными способами: либо путем непосредственного использования генерируемого напряжения, либо путем изменения внутренних параметров двигателя.
На фиг.5 представлена реализация, которой соответствуют графики электрических характеристик на фиг.2 и фиг.3. В данном примере цепь срабатывает от напряжения 50 В. Это означает, что при напряжении ниже 50 В исполнительный механизм может работать, как обычно. Однако необходимо, чтобы блок управления не замыкал двигатель накоротко при бездействии. Важно, что генерация напряжения имеет место, когда исполнительный орган перемещается обратно в начальное положение, ввиду чего напряжение имеет отрицательную полярность по отношению к напряжению, которым исполнительный орган выдвигался наружу. Пример электрической схемы, решающей эту задачу, показан на фиг.7. Подаваемое на двигатель напряжение с положительной полярностью на клемме М2 по отношению к М1 приводит двигатель в движение, перемещающее исполнительный орган в поступательном направлении. Предполагается, что при использовании данной конструкции в кровати, такое перемещение исполнительного органа соответствует подъему части кровати вместе с ее нагрузкой. При отключении напряжения исполнительный орган фиксируется в своем положении при помощи тормоза. Если отпустить тормоз, то вследствие отсутствия самоблокировки шпинделя в исполнительном механизме и благодаря высокой технической эффективности червячного механизма и двигателя, при наличии поднятого груза исполнительный орган начнет обратное движение в исходное положение. Двигатель будет работать как генератор, и создаваемое при этом напряжение будет положительным в точке М1 по отношению к М2. Пока движение не подавляется, скорость двигателя будет возрастать, что ведет к увеличению генерируемого напряжения. Когда напряжение достигнет предварительно заданной пороговой величины, сработает цепь, которая ограничит число оборотов, создавая нагрузку на генератор. Практически это осуществляется за счет того, что транзистор, изображенный здесь как полевой транзистор, замкнет накоротко двигатель при достижении порогового напряжения на стабилитроне. Тем самым будет обеспечена регулировка скорости.
В другой реализации, показанной на фиг.6, применено реле. Когда двигатель неподвижен, к нему подключена цепь поглощения. Обмотка реле смонтирована непосредственно при кабеле исполнительного механизма, так что при активации канала управления цепь поглощения отключается и двигатель оказывается подключенным к каналу. В данной реализации блок управления может замыкать накоротко клеммы М1 и М2, поскольку эти клеммы фактически разомкнуты, когда двигатель не приводится в движение блоком управления. Следует отметить, что электрическая цепь на фиг.8, в принципе, идентична цепи на фиг.7, но дополнительно содержит реле. В этой реализации пороговое напряжение для торможения двигателем может выбираться свободно, поскольку оно не связано с напряжением в блоке управления. Это означает, что в данной реализации эту цепь можно выполнять без учета блока управления и, в принципе, в простейшем виде она может состоять из шунта короткого замыкания или постоянной резистивной нагрузки, но возможны и более развитые решения, наподобие представленного. На графике фиг.4 изображена ситуация, когда пороговое напряжение для торможения выбрано ниже рабочего напряжения двигателя.
В варианте, показанном на фиг.9, компоненты поглощающей цепи физически расположены в блоке управления, а не внутри исполнительного механизма. Принцип действия при этом сохраняется прежний, отличие только в местоположении. Система может работать и при отсутствии тока. В то же время чертеж показывает и исходную реализацию, где компоненты поглощающей цепи расположены в исполнительном механизме.
В качестве дальнейшего развития устройства торможения двигателем предлагается, но не иллюстрируется, интеллектуальная система, в которой для более точной регулировки скорости исполнительного органа при отпущенном тормозе используется система определения положения исполнительного механизма. В обычном случае для определения числа оборотов двигателя относительно некоторого положения, как правило, концевого ограничителя, используется по меньшей мере один геркон или датчик Холла. Это число оборотов может быть пересчитано в положение исполнительного органа, поскольку известен шаг подачи резьбы шпинделя. Если же, например, для определения положения исполнительного органа используется микропроцессор, его программа может быть расширена так, чтобы он вычислял скорость двигателя. Это значение скорости можно использовать для того, чтобы вычислить, как следует коммутировать нагрузку генератора, чтобы управлять скоростью. При этом микропроцессор может непосредственно управлять полевым транзистором, создавая динамическую нагрузку, которая обеспечит точное задание скорости. Чтобы избежать рассеяния энергии в компонентах цепи, микропроцессор может управлять транзистором посредством широтно-импульсной модуляции. В варианте без микропроцессора необходимый эффект может быть достигнут за счет преобразования управляющего сигнала с помощью триггера Шмитта в прямоугольные импульсы, что позволит минимизировать рассеяние энергии в управляющем транзисторе. Таким образом, рабочий цикл сигнала будет задавать соотношение между временем, когда генератор нагружен и когда бездействует. Если используется также информация от микропроцессора о положении исполнительного органа, можно рассчитать форсированное торможение двигателем, которое будет включаться непосредственно перед концевым ограничителем, чтобы избежать столкновения с ним исполнительного органа, которое могло бы причинить разрушения. При этом ничто не мешает управляющей системе для более интенсивного торможения приложить напряжение противоположной полярности по отношению к генератору. Это соответствует тому, что управляющая система пытается перемещать исполнительный орган в направлении, противоположном текущему направлению движения. Прикладываемое таким образом напряжение, для более эффективного снижения скорости, может быть динамическим в виде переменного или широтно-импульсно модулированного напряжения.
Данное изобретение не исключает, что генерируемое напряжение используется только в качестве управляющего сигнала, что означает, что к генератору не прилагается значимой электрической нагрузки. С помощью управляющего сигнала можно управлять электромеханическим тормозом, соединенным с трансмиссией и/или двигателем, динамически или прерывисто включаемым, чтобы управлять скоростью соответственно исполнительного органа или двигателя. Такое механическое торможение может естественным образом сочетаться с электрическим торможением двигателем в качестве нагружаемого генератора, как было описано выше.
Используемый в данном описании термин «микропроцессор» подразумевает любые устройства, способные обеспечить такую обработку данных в описанном процессе, которая отнесена в этом описании на долю микропроцессора. Это, в частности, контроллеры, PIC, AVR, RISC-процессоры, аппаратные реализации конечных автоматов, специализированные интегральные схемы и подобные.
Изобретение относится к области электротехники и может быть использовано в исполнительных механизмах. Техническим результатом является упрощение и управление скоростью во время разъединения. Исполнительный механизм содержит реверсивный электрический двигатель и трансмиссию для приведения в движение исполнительного органа, имеющего возможность возвратно-поступательного перемещения. Исполнительный орган, двигатель и трансмиссия не имеют самоблокировки. Имеется тормоз для удержания исполнительного органа в любом положении, когда электрический двигатель неактивен. Указанный тормоз может быть отпущен механизмом размыкателя. Двигатель используется как генератор при отпускании тормоза, а напряжение, создаваемое генератором, используется для регулирования скорости исполнительного органа. Имеется быстродействующий размыкатель, который позволяет выводить исполнительный орган из зацепления с двигателем и трансмиссией для коррекции положения в таком состоянии, причем движение исполнительного органа в расцепленном состоянии происходит с управляемой скоростью. 13 з.п. ф-лы, 9 ил.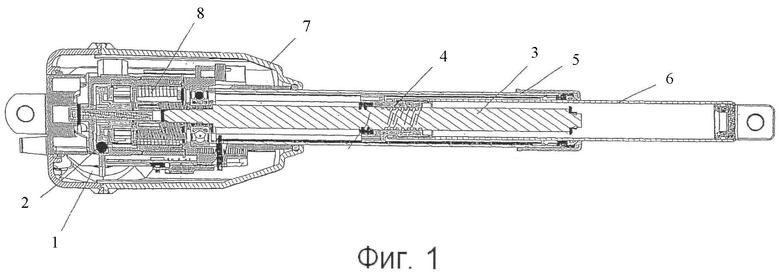
1. Исполнительный механизм, содержащий реверсивный электрический двигатель и трансмиссию для приведения в движение исполнительного органа, имеющего возможность возвратно-поступательного перемещения, причем исполнительный орган не имеет самоблокировки, быстродействующий размыкатель и средства управления скоростью, позволяющие выводить исполнительный орган из зацепления с трансмиссией и управлять его скоростью в расцепленном состоянии, отличающийся тем, что двигатель и трансмиссия также не являются самоблокирующимися, исполнительный механизм имеет тормоз для удержания исполнительного органа в любом положении, когда электрический двигатель неактивен, причем указанный тормоз может быть отпущен механизмом размыкателя, при отпускании тормоза двигатель используется как генератор, а напряжение, создаваемое генератором, используется для регулирования скорости исполнительного органа.
2. Исполнительный механизм по п.1, отличающийся тем, что скорость исполнительного органа может регулироваться путем нагружения двигателя.
3. Исполнительный механизм по п.2, отличающийся тем, что двигатель замкнут накоротко и что нагрузка является резистивной или управляется широтно-импульсной модуляцией.
4. Исполнительный механизм по п.1, отличающийся тем, что, когда напряжение, создаваемое генератором, достигает определенного уровня, например 28-34 В, включается торможение.
5. Исполнительный механизм по п.4, отличающийся тем, что содержит транзистор, например полевой транзистор, для установления напряжения генератора, при котором должно быть включено торможение.
6. Исполнительный механизм по п.1, отличающийся тем, что содержит потенциометр для регулирования скорости.
7. Исполнительный механизм по п.1, отличающийся тем, что торможение происходит посредством создания напряжения, полярность которого противоположна полярности напряжения, создаваемого генератором.
8. Исполнительный механизм по п.7, отличающийся тем, что создаваемое напряжение может быть импульсно модулированным.
9. Исполнительный механизм по любому из пп.1-8, отличающийся тем, что включает микропроцессор для вычисления необходимого эффекта торможения.
10. Исполнительный механизм по п.9, отличающийся тем, что эффект торможения рассчитывают по скорости двигателя, измеряемой, например, датчиками, которые установлены на двигателе или шпинделе.
11. Исполнительный механизм по п.9, отличающийся тем, что в качестве входной информации микропроцессора используется положение исполнительного органа для обеспечения замедления исполнительного органа перед контактом с концевым ограничителем.
12. Исполнительный механизм по п.9, отличающийся тем, что микропроцессор управляет активацией торможения двигателем через интерфейс.
13. Исполнительный механизм по п.12, отличающийся тем, что интерфейс использует сигнал в форме напряжения, тока, магнитного поля или оптический сигнал.
14. Исполнительный механизм по п.1, отличающийся тем, что напряжение, создаваемое генератором, используется для управления электромеханическим тормозом в целях ограничения скорости двигателя, непосредственно или в качестве управляющего сигнала.
| ИМПУЛЬСНЫЙ ТЕРМОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1992 |
|
RU2076397C1 |
| Линейный электромеханический привод | 1990 |
|
SU1749582A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОМПЛЕКСА ЖЕЛЕЗА (III) С ОДНИМ АНИОНОМ САЛИЦИЛОВОЙ КИСЛОТЫ | 2006 |
|
RU2307118C1 |
| US 2005168078 A1, 04.08.2005 | |||
| JP 2004044766 A, 12.02.2004 | |||
| WO 9830816 A1, 16.07.1998. | |||

