ПЕРЕКРЕСТНАЯ ССЫЛКА НА СМЕЖНЫЕ ЗАЯВКИ
Настоящая безусловная заявка на патент испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,365 «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МНОЖЕСТВОМ ФУНКЦИЙ, ОСУЩЕСТВЛЯЕМЫХ ОДНИМ ДВИГАТЕЛЕМ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки. Настоящая безусловная заявка на патент также испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,376 «ЛИНЕЙНЫЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки. Настоящая безусловная заявка на патент также испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,382 «ЛИНЕЙНЫЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ДВИГАТЕЛЕМ И ПИСТОЛЕТНОЙ РУКОЯТКОЙ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки. Настоящая безусловная заявка на патент испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,385 «РУКОЯТКА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА С МНОЖЕСТВОМ АКТИВИРУЮЩИХ ДВИГАТЕЛЕЙ И С УПРАВЛЕНИЕМ ДВИГАТЕЛЯМИ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки. Настоящая безусловная заявка на патент также испрашивает приоритет в соответствии с §119(e) ст. 35 Свода законов США по предварительной заявке на патент США № 61/812,372 «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МНОЖЕСТВОМ ФУНКЦИЙ, ОСУЩЕСТВЛЯЕМЫХ ОДНИМ ДВИГАТЕЛЕМ», поданной 16 апреля 2013 года, которая полностью включена в настоящий документ путем ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Различные формы изобретения относятся к хирургическим инструментам, а в различных вариантах осуществления - к хирургическим режущим и сшивающим инструментам и кассетам со скобками для них, которые выполнены с возможностью рассечения и сшивания ткани скобками.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению предложен хирургическая инструментальная система, содержащая: хирургический инструмент, содержащий: первую поворотную приводную систему, включающую в себя первый поворотный приводной вал, включающий ось первого приводного вала; и вторую поворотную систему, выполненную с возможностью функционирования независимо от первой поворотной приводной системы, и включающую в себя второй поворотный приводной вал, включающий в себя ось второго приводного вала, которая смещена относительно оси первого приводного вала и параллельна ей, и при этом хирургическая инструментальная система также содержит: по меньшей мере, один хирургический концевой эффектор, содержащий: первую приводную систему концевого эффектора, включающую первый ведомый вал концевого эффектора; и вторую приводную систему концевого эффектора, включающую второй ведомый вал концевого эффектора, причем хирургическая инструментальная система также содержит: средство для одновременного разъемного и функционального соединения первого поворотного приводного вала к первому ведомому валу концевого эффектора и второго поворотного приводного вала ко второму ведомому валу концевого эффектора, таким образом, что вращение первого поворотного приводного вала вращает первый ведомый вал концевого эффектора, и вращение второго поворотного приводного вала вращает второй ведомый вал концевого эффектора, при этом средство для одновременно разъемного и функционального соединения первого поворотного приводного вала с первым ведомым валом концевого эффектора и второго поворотного приводного вала со вторым ведомым валом концевого эффектора содержат: штырьковый соединитель на каждом из первого и второго поворотных приводных валов; и гнездовой соединитель на каждом из первого и второго ведомых валах концевого эффектора, таким образом, что когда первая ось приводного вала первого поворотного приводного вала соосно выравнена с первой осью ведомого вала первого ведомого вала концевого эффектора, и когда вторая ось приводного вала второго поворотного приводного вала соосно выравнена со второй осью ведомого вала второго ведомого вала концевого эффектора, штырьковые соединители первого и второго поворотных приводных валов выполнены с возможностью одновременного функционального вхождения в гнездовые соединители на первом и втором ведомых валах концевого эффектора, штырьковые соединители присоединены к первому и второму поворотными приводным валам таким образом, что по меньшей мере один штырьковый соединитель выполнен с возможностью углового перемещения на первое предварительно заданное значение углового перемещения.
По меньшей мере один хирургический концевой эффектор содержит: открытый линейный сшиватель; изогнутый режущий сшиватель; и круглый хирургический сшиватель.
Хирургический инструмент также содержит: кожух, функционально поддерживающий внутри первую и вторую поворотные приводные системы; двигатель, функционально поддерживаемый кожухом; и узел переключаемой трансмиссии, поддерживаемый кожухом и функционально взаимодействующий с двигателем и первой и второй поворотными приводными системами для избирательного приводного соединения двигателя с первой и второй поворотными приводными системами по отдельности, таким образом, что когда первая поворотная приводная система находится в приводном соединении с двигателем, вторая поворотная приводная система не находится в приводном соединении с двигателем, и когда вторая поворотная приводная система находится в приводном соединении с двигателем, первая поворотная приводная система не находится в приводном соединении с двигателем, и где каждый из по меньшей мере одного хирургического концевого эффектора содержит: кожух концевого эффектора, выполненный с возможностью разъемного соединения с кожухом хирургического инструмента таким образом, что когда кожух концевого эффектора и кожух хирургического инструмента соединены, первый и второй приводные валы остаются функционально соединенными с первым и вторым ведомыми валами концевого эффектора соответственно, с помощью средства для одновременно разъемного и функционального соединения.
По меньшей мере один хирургический концевой эффектор содержит: первый компонент концевого эффектора, подвижно поддерживаемый относительно второго компонента концевого эффектора между открытой и закрытой позициями относительно друг друга с помощью первой приводной системы концевого эффектора; и третий компонент концевого эффектора, поддерживаемый для осевого перемещения относительно по меньшей мере одного из первого и второго компонентов концевого эффектора между начальной и конечной позициями с помощью второй приводной системы концевого эффектора.
Первый компонент концевого эффектора содержит упор, при этом второй компонент концевого эффектора содержит кассету с хирургическими скобками, причем третий компонент концевого эффектора содержит поверхность для рассечения ткани.
Штырьковые соединители соединены с первым и вторым ведомыми валами концевого эффектора и гнездовые соединители соединены с первым и вторым поворотными приводными валами.
Первое предварительно заданное значение углового перемещения содержит первый диапазон предварительно заданного углового перемещения от десяти до пятнадцати градусов.
Гнездовые соединители присоединены к первому и второму ведомым валам концевого эффектора таким образом, что по меньшей мере один гнездовой соединитель выполнен с возможностью перемещения на второе предварительно заданное значение углового перемещения.
Второе предварительно заданное значение углового перемещения содержит второй диапазон предварительно заданного углового перемещения от десяти до пятнадцати градусов.
Штырьковые соединители присоединены к первому и второму поворотным приводным валам таким образом, что по меньшей мере один штырьковый соединитель выполнен с возможностью перемещения на первое предварительно заданное значение углового перемещения, и где каждый из гнездовых соединителей подсоединен к первому и второму ведомым валам концевого эффектора таким образом, что по меньшей мере один гнездовой соединитель выполнен с возможностью перемещения на второе предварительно заданное значение углового перемещения.
Первое и второе предварительно заданные значения углового перемещения равны.
Согласно второму аспекту изобретения предложена механическая соединительная система для разъемного соединения сдвоенных поворотных приводных валов хирургического инструмента, причем первый поворотный приводной вал хирургического инструмента включает первую ось приводного вала, и второй поворотный приводной вал хирургического инструмента включает вторую ось приводного вала, которая смещена относительно первой оси приводного вала и параллельна ей для соответствующих сдвоенных поворотных приводных валов хирургического концевого эффектора, при этом механическая соединительная система содержит: штырьковый соединитель на каждом из первого и второго поворотных приводных валов хирургического инструмента, причем каждый штырьковый соединитель содержит: штырьковую корпусную часть, выполненную с возможностью присоединения к соответствующему одному из первого и второго поворотных приводных валов, при этом корпусная часть включает центральную часть; по меньшей мере, три удлиненных приводных ребра, сформированных в корпусной части и равномерно расположенных вокруг центральной части, при этом каждое удлиненное приводное ребро включает заостренный дистальный конец, и причем механическая соединительная система также содержит: гнездовой соединитель на каждом из сдвоенных поворотных ведомых валов хирургического концевого эффектора, при этом каждый гнездовой соединитель содержит: гнездовую корпусную часть, соединенную с соответствующим одним из ведомых валов концевого эффектора, при этом гнездовая корпусная часть включает удлиненные гнездовые желоба, сформированных на ней, причем удлиненные гнездовые желоба соответствуют по количеству и относительному расположению, по меньшей мере, трем удлиненным приводным ребрам на соответствующем одном из штырьковых соединителей, при этом каждый удлиненный гнездовой желоб включает конусовидную проксимальную входную часть для упрощения ввода в него соответствующего удлиненного приводного ребра, при этом по меньшей мере одна из штырьковых корпусных частей подвижно соединена с соответствующим одним из первого и второго поворотных приводных валов с возможностью углового перемещения в пределах первого предварительно заданного диапазона углового перемещения.
По меньшей мере одна из гнездовых корпусных частей подвижно соединена с соответствующим одним из ведомых валов концевого эффектора с возможностью углового перемещения на нем в пределах второго предварительно заданного диапазона углового перемещения.
Каждая из штырьковых корпусных частей подвижно соединена с соответствующим одним из первого и второго поворотных приводных валов с возможностью углового перемещения на нем в пределах первого предварительно заданного диапазона углового перемещения; и каждая из гнездовых корпусных частей подвижно соединена с соответствующим одним из ведомых валов концевого эффектора с возможностью углового перемещения на нем в пределах второго предварительно заданного диапазона углового перемещения.
Согласно третьему аспекту предложена хирургическая инструментальная система, содержащая: хирургический инструмент, содержащий: первую поворотную приводную систему, включающую первый поворотный приводной вал, включающий ось первого приводного вала; и вторую поворотную приводную систему, выполненную с возможностью независимой работы от первой поворотной приводной системы, и включающую второй поворотный приводной вал, включающий ось второго приводного вала, которая смещена относительно оси первого приводного вала и параллельна ей, и при этом система также содержит: по меньшей мере, один хирургический концевой эффектор, содержащий: первую приводную систему концевого эффектора, включающую в себя первый ведомый вал концевого эффектора; и вторую приводную систему концевого эффектора, включающую в себя второй ведомый вал концевого эффектора, причем хирургическая инструментальная система также содержит: механическую соединительную систему для разъемного и функционального соединения первого поворотного приводного вала с первым ведомым валом концевого эффектора и второго поворотного приводного вала со вторым ведомым валом концевого эффектора, причем механическая соединительная система содержит: штырьковый соединитель на каждом из первого и второго поворотных приводных валов хирургического инструмента, при этом каждый штырьковый соединитель содержит: штырьковую корпусную часть, присоединяемую к соответствующему одному из первого и второго поворотных приводных валов, при этом корпусная часть включает центральную часть; по меньшей мере, три удлиненных приводных ребра, сформированных в корпусной части и равномерно расположенных вокруг центральной части, причем каждое удлиненное приводное ребро включает заостренный дистальный конец, и при этом механическая соединительная система также содержит: гнездовой соединитель на каждом из первого и второго ведомых валов хирургического концевого эффектора, при этом каждый гнездовой соединитель содержит: гнездовую корпусную часть, соединенную с соответствующим одним из ведомых валов концевого эффектора, при этом гнездовая корпусная часть включает удлиненные гнездовые желоба, сформированных на ней, при этом удлиненные гнездовые желоба соответствуют по количеству и относительному расположению, по меньшей мере, трем удлиненным приводным ребрам на соответствующем штырьковом соединителе, и при этом каждый удлиненный гнездовой желоб включает конусовидную проксимальную входную часть для упрощения ввода в него соответствующего удлиненного приводного ребра, при этом каждая из штырьковых корпусных частей подвижно соединена с соответствующим одним из первого и второго поворотных приводных валов с возможностью углового перемещения в пределах первого предварительно заданного диапазона углового перемещения; и каждая из гнездовых корпусных частей подвижно соединена с соответствующим одним из ведомых валов концевого эффектора с возможностью углового перемещения в пределах второго предварительно заданного диапазона углового перемещения.
Штырьковые соединители соединены с первым и вторым ведомыми валами концевого эффектора, а гнездовые соединители соединены с первым и вторым воротными приводными валами.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Различные элементы и преимущества настоящего изобретения, а также способы их достижения станут более очевидны, а само изобретение станет более понятным путем ссылки на следующее описание вариантов осуществления настоящего изобретения в совокупности с сопроводительными рисунками, причем:
на ФИГ. 1 представлен вид в перспективе модульной хирургической системы, содержащей хирургический инструмент с приводом и три взаимозаменяемых концевых эффектора;
на ФИГ. 2 представлен вид сбоку в перспективе хирургического инструмента с приводом, причем участок корпуса рукоятки удален для ясности;
на ФИГ. 3 представлен частичный вид с пространственным разделением компонентов узла хирургического инструмента, изображенного на ФИГ. 2;
на ФИГ. 4 представлен другой вид с пространственным разделением компонентов хирургического инструмента, изображенного на ФИГ. 2 и 3;
на ФИГ. 5 представлен вид сбоку в вертикальной проекции хирургического инструмента с приводом, причем участок корпуса рукоятки удален;
на ФИГ. 6 представлен вид в перспективе электроприводной системы и узла трансмиссии, причем узел трансмиссии находится в первом приводном положении, при этом активация двигателя приведет к активации первой приводной системы хирургического инструмента, изображенного на ФИГ. 2–5;
на ФИГ. 6A представлен вид в перспективе альтернативной передаточной каретки с блокирующими механизмами;
на ФИГ. 6B представлен вид в перспективе электроприводной системы и узла трансмиссии, включающего в себя передаточную каретку, изображенную на ФИГ. 6A, причем узел трансмиссии находится в первом приводном положении, при этом активация двигателя приведет к активации первой приводной системы, а вторая приводная система заблокирована блокирующими механизмами;
на ФИГ. 6C представлен вид в перспективе электроприводной системы и узла трансмиссии, изображенных на ФИГ. 6B, причем узел трансмиссии находится во втором приводном положении, при этом активация двигателя приведет к активации второй приводной системы, а первая приводная система заблокирована блокирующими механизмами;
на ФИГ. 7 представлен еще один вид в перспективе электроприводной системы и узла трансмиссии, изображенных на ФИГ. 6, причем узел трансмиссии находится во втором приводном положении, при этом активация двигателя приведет к активации второй приводной системы;
на ФИГ. 8 представлен вид сбоку в вертикальной проекции другого хирургического инструмента с приводом, причем участок корпуса рукоятки и другие его участки опущены для ясности;
на ФИГ. 9 представлен вид в перспективе двигателя, узла трансмиссии и первой и второй приводных систем хирургического инструмента, изображенного на ФИГ. 8, причем узел трансмиссии находится в первом приводном положении;
на ФИГ. 10 представлен вид в поперечном сечении в вертикальной проекции двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 9, причем узел трансмиссии находится в первом приводном положении;
на ФИГ. 11 представлен другой вид в перспективе двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 9 и 10, причем узел трансмиссии находится во втором приводном положении;
на ФИГ. 12 представлен еще один вид в поперечном сечении в вертикальной проекции двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 9–11, причем узел трансмиссии находится во втором приводном положении;
на ФИГ. 13 представлен частичный вид сзади в перспективе участка другого хирургического инструмента с приводом;
на ФИГ. 14 представлен вид сбоку в вертикальной проекции двигателя, узла трансмиссии и первой и второй приводных систем хирургического инструмента, изображенного на ФИГ. 13;
на ФИГ. 15 представлен вид в поперечном сечении узла трансмиссии хирургического инструмента, изображенного на ФИГ. 13 и 14, в первом положении привода;
на ФИГ. 16 представлен другой вид в поперечном сечении узла трансмиссии хирургического инструмента, изображенного на ФИГ. 13–15, во втором положении привода;
на ФИГ. 17 представлен вид в перспективе другой конструкции хирургического инструмента с приводом, причем участок корпуса удален для ясности;
на ФИГ. 18 представлен вид в перспективе двигателя, узла трансмиссии и первой и второй приводных систем хирургического инструмента, изображенного на ФИГ. 17;
на ФИГ. 19 представлен общий вид с пространственным разделением компонентов двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 18;
на ФИГ. 20 представлен вид в поперечном сечении участков двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 18 и 19, причем узел передаточного вала находится в первом приводном положении;
на ФИГ. 21 представлен другой вид в поперечном сечении участков двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 20, причем узел передаточного стержня находится в первом приводном положении;
на ФИГ. 22 представлен вид в перспективе другого двигателя, узла трансмиссии и первой и второй приводных систем одной формы хирургического инструмента настоящего изобретения;
на ФИГ. 23 представлен общий вид с пространственным разделением компонентов двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 22;
на ФИГ. 24 представлен вид в поперечном сечении двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 22 и 23, причем узел трансмиссии находится в первом приводном положении;
на ФИГ. 25 представлен еще один вид в поперечном сечении двигателя, узла трансмиссии и первой и второй приводных систем, изображенных на ФИГ. 22–24, причем узел трансмиссии находится во втором приводном положении;
на ФИГ. 26 представлен еще один вид в поперечном сечении двигателя и узла трансмиссии, изображенных на ФИГ. 22–25, причем узел трансмиссии находится в первом приводном положении;
на ФИГ. 27 представлен еще один вид в поперечном сечении двигателя и узла трансмиссии, изображенных на ФИГ. 22–26, причем узел трансмиссии находится во втором приводном положении;
на ФИГ. 28 представлен вид сбоку в вертикальной проекции участка другого хирургического инструмента с приводом, причем участок корпуса удален для ясности;
на ФИГ. 29 представлен вид в перспективе участка другого хирургического инструмента с приводом, причем участок корпуса удален для ясности;
на ФИГ. 30 представлен вид спереди в перспективе блока с приводом с первой и второй системами вращательных приводов;
на ФИГ. 31 представлен вид в перспективе блока с приводом, изображенного на ФИГ. 30;
на ФИГ. 32 представлен вид в перспективе блока с приводом, изображенного на ФИГ. 31 и 32, с которого удален корпус;
на ФИГ. 33 представлен общий вид с пространственным разделением компонентов механической соединительной системы для функционального соединения друг с другом четырех вращательных приводных валов;
на ФИГ. 34 представлен вид спереди в перспективе хирургического концевого эффектора, причем участок корпуса концевого эффектора удален для ясности;
на ФИГ. 35 представлен другой вид спереди в перспективе хирургического концевого эффектора, изображенного на ФИГ. 34, причем участки закрывающей системы и нижней бранши опущены для ясности;
на ФИГ. 36 представлен общий вид в перспективе с пространственным разделением компонентов хирургического концевого эффектора, изображенного на ФИГ. 34 и 35;
на ФИГ. 37 представлен вид в вертикальной проекции сбоку хирургического концевого эффектора, изображенного на ФИГ. 33–36, причем участок корпуса опущен для ясности;
на ФИГ. 38 представлен вид в перспективе сбоку слева другой конструкции концевого эффектора, причем участок корпуса концевого эффектора опущен для ясности;
на ФИГ. 39 представлен общий вид с пространственным разделением компонентов концевого эффектора, изображенного на ФИГ. 38;
на ФИГ. 40 представлен вид в перспективе сбоку конструкции концевого эффектора, изображенного на ФИГ. 37 и 38, причем другой участок концевого эффектора опущен для ясности;
на ФИГ. 41 представлен вид в поперечном сечении конструкции концевого эффектора, представленного на ФИГ. 38–40;
на ФИГ. 42 представлен вид в поперечном сечении в перспективе другого варианта осуществления хирургического концевого эффектора;
на ФИГ. 43 представлен частичный общий вид с пространственным разделением компонентов хирургического концевого эффектора, представленного на ФИГ. 42;
на ФИГ. 44 представлен другой частичный вид в перспективе участка хирургического концевого эффектора, изображенного на ФИГ. 42 и 43;
на ФИГ. 45 представлен другой вид в поперечном сечении хирургического концевого эффектора, представленного на ФИГ. 42–44;
на ФИГ. 46 представлен вид в перспективе конструкции концевого эффектора с узлом высвобождения привода;
на ФИГ. 47 представлен частичный вид в перспективе хирургического концевого эффектора, изображенного на ФИГ. 46, некоторые участки которого опущены для ясности и проксимальный участок приводного механизма закрывающей системы отсоединена от дистального участка приводного механизма закрывающей системы;
на ФИГ. 48 представлен частичный вид в перспективе хирургического концевого эффектора, изображенного на ФИГ. 46 и 47, причем его участки опущены для ясности, дистальный соединительный элемент установлен в паз проксимального соединительного элемента, а соединительный штифт привода удален из них;
на ФИГ. 49 представлен другой частичный вид в перспективе хирургического концевого эффектора, изображенного на ФИГ. 48, демонстрирующий участки пусковой системы концевого эффектора;
на ФИГ. 50 представлен вид в перспективе другой конструкции хирургического концевого эффектора;
на ФИГ. 50A представлен увеличенный вид участка хирургического концевого эффектора, показанного на ФИГ. 50;
на ФИГ. 51 представлен вид в перспективе участка концевого эффектора, изображенного на ФИГ. 50, причем участок корпуса опущен для ясности;
на ФИГ. 52 представлен еще один вид в перспективе концевого эффектора, изображенного на ФИГ. 50 и 51, причем участки корпуса и закрывающей системы опущены для ясности;
на ФИГ. 53 представлен другой вид в перспективе концевого эффектора, изображенного на ФИГ. 50–52, причем участки закрывающей системы и участок корпуса опущены для ясности;
на ФИГ. 54 представлен вид в перспективе другого концевого эффектора, который оборудован узлом высвобождения привода;
на ФИГ. 55 показан вид сбоку в вертикальной проекции концевого эффектора, изображенного на ФИГ. 54;
на ФИГ. 56 представлен вид в перспективе участка концевого эффектора, изображенного на ФИГ. 54 и 55, причем участок корпуса концевого эффектора опущен для ясности;
на ФИГ. 57 представлен другой вид в перспективе концевого эффектора, показанного на ФИГ. 54–56, на котором головка инструмента находится в закрытом положении;
на ФИГ. 58 представлен другой частичный вид в перспективе концевого эффектора, изображенного на ФИГ. 57, причем участок корпуса концевого эффектора опущен для ясности;
на ФИГ. 59 представлен другой вид в перспективе концевого эффектора, изображенного на ФИГ. 58, причем соединительный штифт привода удален;
на ФИГ. 60 представлен другой вид в перспективе концевого эффектора, изображенного на ФИГ. 59, с удаленным соединительным штифтом привода и узлом балки закрывающего привода, перемещенным проксимально для открытия головки инструмента;
на ФИГ. 61 представлена блок-схема модульного хирургического инструмента с приводом, содержащего рукояточный участок и стволовой участок;
на ФИГ. 62 представлена таблица, демонстрирующая общее время выполнения рабочего хода и требования по нагрузочному току для различных операций различных стволов устройства;
на ФИГ. 63, которая разделена на ФИГ. 63-A и 63-B, представлена подробная схема электрической системы в рукояточном участке модульного хирургического инструмента с приводом;
на ФИГ. 64 представлена блок-схема электрической системы рукояточного и стволового участков модульного хирургического инструмента с приводом;
на ФИГ. 65 показана механическая переключательная система управления перемещениями для устранения микропроцессорного управления функциями двигателя;
на ФИГ. 66 представлен вид в перспективе соединительной конструкции, содержащей корпус соединителя и пару гнезд внутри корпуса соединителя в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 67 представлен вид в поперечном сечении в перспективе соединительной конструкции, изображенной на ФИГ. 66, представляющий пару приводных элементов, отсоединенных от пары гнезд, и дополнительно показывающий соединительную конструкцию в незаблокированной конфигурации в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 68 представлен вид в поперечном сечении в перспективе соединительной конструкции, изображенной на ФИГ. 66, показывающий пару приводных элементов, соединенных с парой гнезд, и дополнительно показывающий соединительную конструкцию в заблокированной конфигурации в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 69 представлен вид в поперечном сечении в перспективе соединительной конструкции, изображенной на ФИГ. 66, показывающий пару приводных элементов, соединенных с парой гнезд, и дополнительно показывающий соединительную конструкцию в незаблокированной конфигурации в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 70 представлен вид в перспективе вставки соединительной конструкции, изображенной на ФИГ. 66, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 71 представлен вид в перспективе гнезда соединительной конструкции, изображенной на ФИГ. 66, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 72 представлен вид в перспективе защелки соединительной конструкции, изображенной на ФИГ. 66, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 73 представлен вид в поперечном сечении в вертикальной проекции хирургического концевого эффектора-насадки для применения с рукояткой хирургического инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 74 представлен вид в перспективе с пространственным разделением компонентов приводных систем хирургического концевого эффектора-насадки, изображенной на ФИГ. 73, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 75 представлен вид в перспективе рукоятки для хирургического инструмента, причем рукоятка содержит приводную систему, имеющую первый выходной приводной узел и второй выходной приводной узел в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 76 представлен вид в перспективе приводной системы, изображенной на ФИГ. 75, в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 77 представлен вид в поперечном сечении в вертикальной проекции рукоятки, изображенной на ФИГ. 75, показывающий приводную систему, взаимодействующую с первым выходным приводным узлом и высвобожденную от второго выходного приводного узла в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 78 представлен вид в поперечном сечении в вертикальной проекции приводной системы, изображенной на ФИГ. 75, демонстрирующий приводную систему, взаимодействующую со вторым выходным приводным узлом и высвобожденную из взаимодействия с первым выходным приводным узлом в соответствии с различными вариантами осуществления настоящего изобретения;
на ФИГ. 79 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, включающего в себя поворачиваемый приводной вал, закрывающий привод, приводимый в действие упомянутым приводным валом, и пусковой привод, приводимый в действие упомянутым приводным валом, причем закрывающий привод показан в частично открытой конфигурации, а пусковой привод показан в незапущенной конфигурации;
на ФИГ. 80 представлен вид в перспективе поворачиваемого приводного вала, изображенного на ФИГ. 79;
на ФИГ. 81 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, изображенного на ФИГ. 79, с закрывающим приводом в открытой конфигурации и пусковым приводом в незапущенной конфигурации;
на ФИГ. 82 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, изображенного на ФИГ. 79, с закрывающим приводом в закрытой конфигурации и пусковым приводом в незапущенной конфигурации;
на ФИГ. 83 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, изображенного на ФИГ. 79, с закрывающим приводом в закрытой конфигурации и пусковым приводом в запущенной конфигурации;
на ФИГ. 84 представлен частичный вид в поперечном сечении в перспективе хирургического инструмента, изображенного на ФИГ. 79, с пусковым приводом в оттянутой конфигурации и закрывающим приводом в процессе повторного открытия;
на ФИГ. 85 представлен частичный вид в поперечном сечении концевого эффектора и ствола хирургического инструмента, изображенных в закрытой, незапущенной конфигурации;
на ФИГ. 86 представлен вид в перспективе трансмиссии для работы с хирургическим инструментом, изображенным на ФИГ. 85, в конфигурации, соответствующей конфигурации, показанной на ФИГ. 85;
на ФИГ. 87 представлен вид с пространственным разделением компонентов трансмиссии, показанной на ФИГ. 86;
на ФИГ. 88 представлен частичный вид в поперечном сечении концевого эффектора и ствола, представленного на ФИГ. 85, изображенных в открытой, незапущенной конфигурации;
на ФИГ. 89 представлен вид в перспективе трансмиссии, изображенной на ФИГ. 86, в конфигурации, соответствующей конфигурации, показанной на ФИГ. 88;
на ФИГ. 90 представлен частичный вид в поперечном сечении концевого эффектора и ствола, изображенного на ФИГ. 85, показанных в закрытой, незапущенной конфигурации;
на ФИГ. 91 представлен вид в перспективе трансмиссии, изображенной на ФИГ. 86, в конфигурации, соответствующей конфигурации, показанной на ФИГ. 90;
на ФИГ. 92 представлен частичный вид в поперечном сечении концевого эффектора и ствола, изображенного на ФИГ. 85, показанных в закрытой, запущенной конфигурации;
на ФИГ. 93 представлен вид в перспективе трансмиссии, изображенной на ФИГ. 86, в конфигурации, соответствующей конфигурации, показанной на ФИГ. 92;
на ФИГ. 94 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления;
на ФИГ. 95 представлен вид с пространственным разделением компонентов рукоятки хирургического сшивающего инструмента, изображенного на ФИГ. 94;
на ФИГ. 96 представлен вид с пространственным разделением компонентов концевого эффектора хирургического сшивающего инструмента, изображенного на ФИГ. 94;
на ФИГ. 97 представлен вид в перспективе двигателя и узла зубчатых колес хирургического сшивающего инструмента, изображенного на ФИГ. 94;
на ФИГ. 98 представлен вид в вертикальной проекции в поперечном сечении хирургического сшивающего инструмента, изображенного на ФИГ. 94;
на ФИГ. 99 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления, изображенным в открытом, незафиксированном состоянии;
на ФИГ. 100 представлен вид в перспективе хирургического сшивающего инструмента, изображенного на ФИГ. 99, в закрытом незафиксированном состоянии;
на ФИГ. 101 представлен вид в перспективе хирургического сшивающего инструмента, изображенного на ФИГ. 99, в закрытом зафиксированном состоянии;
на ФИГ. 102 представлен вид в горизонтальной проекции хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 103 представлен вид в поперечном сечении хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 104 представлен подробный вид в поперечном сечении хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 105 представлен вид с пространственным разделением компонентов пускового привода хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 106 представлен вид с пространственным разделением компонентов закрывающего привода хирургического сшивающего инструмента, изображенного на ФИГ. 99;
на ФИГ. 107 представлен вид в поперечном сечении хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления, содержащим рукоятку, ствол и концевой эффектор;
на ФИГ. 108 представлен вид в поперечном сечении рукоятки хирургического сшивающего инструмента, изображенного на ФИГ. 107, показанного в открытой конфигурации;
на ФИГ. 109 представлен вид в поперечном сечении рукоятки хирургического сшивающего инструмента, изображенного на ФИГ. 107, показанного в закрытой конфигурации;
на ФИГ. 110 представлен вид в перспективе рукоятки хирургического сшивающего инструмента, изображенного на ФИГ. 107, причем некоторые компоненты удалены;
на ФИГ. 111 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления, содержащим рукоятку и ствол;
на ФИГ. 112 представлен вид в перспективе хирургического сшивающего инструмента, изображенного на ФИГ. 111, причем рукоятка отделена от ствола;
на ФИГ. 113 представлен вид с пространственным разделением компонентов хирургического сшивающего инструмента, изображенного на ФИГ. 111;
на ФИГ. 114 представлен частичный вид в поперечном сечении рукоятки, изображенной на ФИГ. 111, демонстрирующий трансмиссию, функционально взаимодействующую с закрывающей системой хирургического сшивающего инструмента, изображенного на ФИГ. 111;
на ФИГ. 115 представлен частичный вид в поперечном сечении рукоятки, изображенной на ФИГ. 111, показывающий трансмиссию, изображенную на ФИГ. 114, функционально взаимодействующую с пусковой системой хирургического сшивающего инструмента, изображенного на ФИГ. 111;
на ФИГ. 116 представлен вид с пространственным разделением компонентов трансмиссии, показанной на ФИГ. 114;
на ФИГ. 117 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с по меньшей мере одним вариантом осуществления, причем некоторые компоненты удалены и показаны в открытой конфигурации;
на ФИГ. 118 представлен вид в перспективе хирургического сшивающего инструмента, изображенного на ФИГ. 117, причем некоторые компоненты удалены и показаны в закрытой конфигурации;
на ФИГ. 119 представлен вид в перспективе другой конструкции концевого эффектора и варианта осуществления блока скоб к нему перед установкой блока скоб в концевой эффектор;
на ФИГ. 120 представлен еще один вид в перспективе концевого эффектора и блока скоб, изображенных на ФИГ. 119, причем блок скоб установлен в концевой эффектор; и
на ФИГ. 121 представлен другой вид в перспективе концевого эффектора и блока скоб, изображенных на ФИГ. 120, причем элемент держателя блока скоб с него удален.
Соответствующие элементы на разных видах обозначаются соответствующими условными обозначениями. Иллюстрации, прилагаемые к настоящей заявке, предназначены исключительно для демонстрации предпочтительных вариантов осуществления изобретения, они не должны толковаться как ограничивающие объем настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 1 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США с серийным № 13/782 295, озаглавленная «ШАРНИРНО ПОВОРАЧИВАЕМЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ПРОВОДЯЩИМИ ДОРОЖКАМИ ДЛЯ ПЕРЕДАЧИ СИГНАЛА»;
- заявка на патент США с серийным № 13/782 323, озаглавленная «ВРАЩАЮЩИЕСЯ ШАРНИРНЫЕ СОЧЛЕНЕНИЯ С ЭЛЕКТРОПИТАНИЕМ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782 338, озаглавленная «МЕХАНИЗМЫ ДИСКОВОГО ПЕРЕКЛЮЧАТЕЛЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782 499, озаглавленная «ЭЛЕКТРОМЕХАНИЧЕСКОЕ ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С МЕХАНИЗМОМ СИГНАЛЬНОГО РЕЛЕ»;
- заявка на патент США с серийным № 13/782 460, озаглавленная «МНОГОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782 358, озаглавленная «УЗЛЫ РЫЧАЖНОГО ПЕРЕКЛЮЧАТЕЛЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/782 481, озаглавленная «КОНЦЕВОЙ ЗАЖИМ, ВЫПРЯМЛЯЕМЫЙ С ПОМОЩЬЮ ДАТЧИКА ВО ВРЕМЯ ИЗВЛЕЧЕНИЯ ЧЕРЕЗ ТРОКАР»;
- заявка на патент США с серийным № 13/782 518, озаглавленная «СПОСОБЫ УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ СО СЪЕМНЫМИ РАБОЧИМИ ЧАСТЯМИ»;
- заявка на патент США с серийным № 13/782 375, озаглавленная «ВРАЩАЮЩИЕСЯ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ЭЛЕКТРОПИТАНИЕМ С МНОЖЕСТВОМ СТЕПЕНЕЙ СВОБОДЫ»; и
- заявка на патент США с серийным № 13/782 536, озаглавленная «МЯГКИЙ ОГРАНИЧИТЕЛЬ ХОДА ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», которые полностью включены в настоящий документ путем ссылки.
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные 14 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США с серийным № 13/803 097, озаглавленная «ШАРНИРНЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД»;
- заявка на патент США с серийным 13/803 193, озаглавленная «УСТРОЙСТВА УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОГО ЭЛЕМЕНТА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА»;
- заявка на патент США с серийным № 13/803 053, озаглавленная «ВЗАИМОЗАМЕНЯЕМЫЕ УЗЛЫ ВАЛОВ ДЛЯ ИСПОЛЬЗОВАНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ»;
- заявка на патент США с порядковым № 13/803 086, озаглавленная «ШАРНИРНЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ФИКСАТОР ШАРНИРА»;
- заявка на патент США с серийным № 13/803 210, озаглавленная «КОМПОНОВКА ДАТЧИКА ДЛЯ СИСТЕМЫ АБСОЛЮТНОГО ПОЗИЦИОНИРОВАНИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/803 148, озаглавленная «МНОГОФУНКЦИОНАЛЬНЫЙ ДВИГАТЕЛЬ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/803 066, озаглавленная «КОНСТРУКЦИЯ БЛОКИРОВКИ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США с серийным № 13/803 117, озаглавленная «СИСТЕМА УПРАВЛЕНИЯ ШАРНИРНЫМИ СОЕДИНЕНИЯМИ ДЛЯ ШАРНИРНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
- заявка на патент США сер. № 13/803,130, озаглавленная «КОНСТРУКЦИИ АВТОРЕГУЛИРОВКИ ПРИВОДНОГО МЕХАНИЗМА ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»; и
- заявка на патент США сер. № 13/803,159, озаглавленная «СПОСОБ И СИСТЕМА ДЛЯ РАБОТЫ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ».
Заявителю настоящей заявки принадлежат нижеуказанные заявки на патенты, поданные 25 марта 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США сер. № 14/226,106, озаглавленная «СИСТЕМЫ УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ЭЛЕКТРОПИТАНИЯ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
заявка на патент США сер. № 14/226,099, озаглавленная «СХЕМА ПРОВЕРКИ СТЕРИЛИЗАЦИИ»;
заявка на патент США сер. № 14/226,094, озаглавленная «ПРОВЕРКА ЧИСЛА ЗАМЕН БАТАРЕИ/КОЛИЧЕСТВА ПРОЦЕДУР»;
заявка на патент США сер. № 14/226,117, озаглавленная «РАСПРЕДЕЛЕНИЕ ПИТАНИЯ ПРИ ПОМОЩИ ВАРИАНТОВ СПЯЩЕГО РЕЖИМА СЕГМЕНТИРОВАННОЙ СХЕМЫ И УПРАВЛЕНИЯ ВЫХОДОМ ИЗ СПЯЩЕГО РЕЖИМА»;
заявка на патент США сер. № 14/226,075, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МОДУЛЬНЫМ ЭЛЕКТРОПИТАНИЕМ И С ОТСОЕДИНЯЕМЫМИ УЗЛАМИ СТВОЛА»;
заявка на патент США сер. № 14/226,093, озаглавленная «АЛГОРИТМЫ ОБРАТНОЙ СВЯЗИ ДЛЯ РУЧНЫХ АВАРИЙНЫХ СИСТЕМ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ»;
заявка на патент США сер. № 14/226,116, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИСПОЛЬЗУЮЩИЙ АДАПТАЦИЮ ПО ДАТЧИКАМ»;
заявка на патент США сер. № 14/226,071, озаглавленная «СХЕМА УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ, ИМЕЮЩАЯ ПРОЦЕССОР БЕЗОПАСНОСТИ»;
заявка на патент США сер. № 14/226 097, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ИНТЕРАКТИВНЫЕ СИСТЕМЫ»;
заявка на патент США сер. № 14/226 126, озаглавленная «СТЫКОВОЧНЫЕ СИСТЕМЫ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ»;
заявка на патент США сер. № 14/226,133, озаглавленная «МОДУЛЬНАЯ СИСТЕМА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА»;
заявка на патент США сер. № 14/226,081, озаглавленная «СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ СЕГМЕНТИРОВАННОЙ СХЕМОЙ»;
заявка на патент США сер. № 14/226,076, озаглавленная «РАСПРЕДЕЛЕНИЕ ПИТАНИЯ ПРИ ПОМОЩИ СЕГМЕНТИРОВАННОЙ СХЕМЫ И ЗАЩИТА С ПЕРЕМЕННЫМ НАПРЯЖЕНИЕМ»;
заявка на патент США с сер. № 14/226,111, озаглавленная «СИСТЕМА ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО ИНСТРУМЕНТА»; и
заявка на патент США сер. № 14/226,125, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПОВОРАЧИВАЕМЫЙ СТВОЛ».
Заявителю настоящей заявки также принадлежат нижеуказанные заявки на патенты, поданные в тот же день, причем каждая из них полностью включена в настоящий документ путем ссылки:
- заявка на патент США сер. № ___________, озаглавленная «ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ПРИВОДОМ С БЛОКИРУЕМЫМИ ДВОЙНЫМИ ПРИВОДНЫМИ ВАЛАМИ», досье патентного поверенного № END7406USNP/140054;
- заявка на патент США сер. № __________________, озаглавленная «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ЗАКРЫВАЮЩИЙ ПРИВОД И ПУСКОВОЙ ПРИВОД, УПРАВЛЯЕМЫЕ ОДНИМ ВРАЩАЮЩИМСЯ ВНЕШНИМ УСТРОЙСТВОМ», досье патентного поверенного № END7407USNP/140055;
- заявка на патент США сер. № ___________, озаглавленная «СТВОЛ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, СОДЕРЖАЩИЙ ПЕРЕКЛЮЧАТЕЛИ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», досье патентного поверенного № END7408USNP/140056;
- заявка на патент США сер. № ___________, озаглавленная «ЛИНЕЙНЫЙ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ», досье патентного поверенного № END7409USNP/140057;
- заявка на патент США сер. № ___________, озаглавленная «КОНСТРУКЦИЯ ТРАНСМИССИИ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», досье патентного поверенного № END7410USNP/140058;
- заявка на патент США сер. № ___________, озаглавленная «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ», досье патентного поверенного № END7412USNP/140060;
- заявка на патент США сер. № ___________, озаглавленная «КОНСТРУКЦИЯ ДЛЯ ОТСОЕДИНЕНИЯ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА», досье патентного поверенного № END7413USNP/140061; и
- заявка на патент США сер. № ___________, озаглавленная «МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ПРИВОДОМ С КОНСТРУКЦИЯМИ ДЛЯ УКАЗАНИЯ СОСТОЯНИЯ», досье патентного поверенного № END7414USNP/140062.
Для обеспечения полного понимания принципов работы конструкции, функционирования, производства и применения устройств и способов, описанных в настоящем документе, приводится описание некоторых примеров вариантов осуществления. Один или более примеров данных вариантов осуществления показаны на сопроводительных рисунках. Обычным специалистам в данной области будет понятно, что устройства и способы, конкретно описанные в настоящем документе и проиллюстрированные на сопроводительных рисунках, представляют собой не имеющие ограничительного характера примеры осуществления и что объем различных вариантов осуществления настоящего изобретения определен только формулой изобретения. Особенности, показанные или описанные в связи с одним примером осуществления, можно комбинировать с особенностями других вариантов осуществления. Предполагается, что объем настоящего изобретения включает такие модификации и варианты.
В настоящем описании ссылка на «различные варианты осуществления», «некоторые варианты осуществления», «один вариант осуществления», «вариант осуществления» или т.п. означает, что конкретная особенность, конструкция или характеристика, описанные в связи с вариантом осуществления, включены по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, фразы «в различных вариантах осуществления», «в некоторых вариантах осуществления», «в одном варианте осуществления» или «в варианте осуществления» или т.п. в настоящем описании не обязательно относятся к одному и тому же варианту осуществления. Более того, конкретные особенности, конструкции или характеристики можно скомбинировать любым подходящим способом в одном или более вариантах осуществления. Таким образом, конкретные особенности, конструкции или характеристики, проиллюстрированные или описанные в связи с одним вариантом осуществления, можно без ограничений полностью или частично скомбинировать с особенностями, конструкциями или характеристиками одного или более других вариантов осуществления. Предполагается, что объем настоящего изобретения включает такие модификации и варианты.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к части, лежащей ближе к врачу, а термин «дистальный» относится к части, удаленной от врача. Предлагается также для удобства и ясности применительно к рисункам использовать в настоящем документе такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз». Тем не менее, поскольку использование хирургических инструментов предполагает множество ориентаций и положений, указанные термины не следует толковать как ограничивающие и (или) абсолютные.
При лапароскопических манипуляциях и хирургических операциях с минимальным вмешательством используются различные типичные приспособления и методы. Однако специалисты в данной области смогут оценить по достоинству различные методы и приспособления, описанные в данном документе, которые могут быть использованы в многочисленных хирургических процедурах и сферах применения, включая, например, те, что связаны с открытыми хирургическими манипуляциями. Углубляясь в настоящее подробное описание, специалисты в данной области также смогут оценить, что различные аппараты, представленные в данном документе, могут вставляться в тело человека любым способом, как то через естественное отверстие, через разрез или прокол в ткани и т.д. Рабочие блоки или блоки концевого зажима инструментов могут вставляться напрямую в тело человека или могут вставляться через приспособления для доступа, оснащенные рабочим желобом, через который могут продвигаться концевой зажим и удлиненный ствол хирургического аппарата.
Обращаясь к рисункам, на которых аналогичные цифры обозначают аналогичные компоненты, на ФИГ. 1 представлена модульная система хирургического инструмента, по существу обозначенная пунктом 2, которая в одной форме включает в себя хирургический инструмент 10 с приводом, который может использоваться в сочетании с различными хирургическими концевыми эффекторами, например, концевыми эффекторами 1000, 2000 и 3000. В показанном варианте осуществления хирургический инструмент с электродвигателем 10 включает корпус 12, состоящий из рукоятки 14, выполненной с возможностью захвата, манипулирования и активирования врачом. По ходу настоящего подробного описания будет понятно, что различные уникальные и новые конструкции приводных систем, представленные в сочетании с рукояткой 14, а также различные конструкции концевых эффекторов, описанные в настоящем документе, также могут эффективно применяться в сочетании с роботизированными хирургическими инструментами. Таким образом, термин «корпус» также может относиться к корпусу или сходному участку роботизированной системы, которая может размещать в себе или иным образом функционально удерживать различные формы приводных систем, представленных в настоящем документе, и которая может быть выполнена с возможностью генерации управляющих перемещений, пригодных для использования при активации конструкций концевых эффекторов, описанных в настоящем документе, и их соответствующих эквивалентных структур. Термин «рама» может относиться к части ручного хирургического инструмента. Термин «рама» также может представлять собой участок системы с приводом двигателя или хирургического инструмента с роботизированным управлением и/или участок роботизированной системы, которая может применяться для функционального управления хирургическим инструментом. Например, конструкции приводных систем и конструкции концевых эффекторов, описанные в настоящем документе, могут применяться с различными роботизированными системами, инструментами, компонентами и способами, изложенными в заявке на патент США сер. № 13/118,241, озаглавленной «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ ИНСТРУМЕНТЫ С ПОВОРАЧИВАЕМЫМИ КОНСТРУКЦИЯМИ ДЛЯ УСТАНОВКИ СКОБ», в настоящее время опубликованной заявке на патент США № 2012/0298719, которая полностью включена в настоящий документ путем ссылки.
Как показано на ФИГ. 2–5, рукоятка 14 может содержать пару корпусных сегментов 16 и 18 рукоятки, которые могут быть соединены винтами, защелками, адгезивом и т.п. В показанной конструкции корпусные сегменты 16 и 18 рукоятки в совокупности образуют участок 19 пистолетной рукоятки, которую можно захватывать рукой и которой может манипулировать врач. Как будет дополнительно описано более подробно, рукоятка 14 функционально удерживает в себе две вращательные приводные системы 20, 40, выполненные с возможностью генерации и приложения различных управляющих перемещений к соответствующим участкам приводных валов соединенного с ними конкретного концевого эффектора. Первая поворотная приводная система 20 может, например, применяться для приложения «закрывающих» перемещений к соответствующей конструкции закрывающего приводного вала, функционально удерживаемой в концевом эффекторе, и вторая поворотная приводная система 40 может применяться для приложения «пусковых» перемещений к соответствующей конструкции пускового приводного вала в присоединенном к ней концевом эффекторе.
Первая и вторая поворотные приводные системы 20, 40 приводятся в действие двигателем 80 через уникальный новый «сдвигаемый» узел 60 трансмиссии, который по существу переключает питание/перемещение между двумя силовыми блоками. Первая поворотная приводная система 20 содержит первый поворотный приводной вал 22, удерживаемый с возможностью поворота в корпусе 12 рукоятки 14 и образующий ось первого приводного вала «FDA-FDA». Первая приводная шестерня 24 закреплена шпонкой или иным образом присоединена без возможности поворота к первому поворотному приводному валу 22 для поворота вместе с ним вокруг оси первого приводного вала FDA-FDA. Аналогично, вторая поворотная приводная система 40 содержит второй поворотный приводной вал 42, удерживаемый с возможностью поворота в корпусе 12 рукоятки 14 и образующий ось второго приводного вала «SDA-SDA». По меньшей мере в одной конструкции ось второго приводного вала SDA-SDA смещена, параллельна или по существу параллельна оси первого приводного вала FDA-FDA. В данном контексте термин «смещена» означает, что оси первого и второго приводных валов, например, не совпадают. Второй поворотный приводной вал 42 имеет вторую приводную шестерню 44, которая закреплена шпонкой или иным образом присоединена без возможности поворота ко второму поворотному приводному валу 42 для поворота вместе с ним вокруг оси второго приводного вала SDA-SDA. Кроме того, второй приводной вал 42 имеет промежуточную приводную шестерню 46, установленную на него с возможностью поворота так, что промежуточная приводная шестерня 46 может свободно поворачиваться на втором поворотном приводном валу 42 вокруг оси второго приводного вала SDA-SDA.
Как показано на ФИГ. 2–5, в одной форме двигатель 80 содержит выходной вал 81 двигателя, к которому без возможности поворота прикреплена приводная шестерня 82 двигателя. Приводная шестерня 82 двигателя выполнена с возможностью зацепляющего «функционального» взаимодействия с узлом 60 трансмиссии, что будет дополнительно подробно описано ниже. По меньшей мере в одной форме узел 60 трансмиссии включает в себя передаточную каретку 62, удерживаемую с возможностью продвижения по оси между приводной шестерней 82 и шестернями 44 и 46 на втором поворотном приводном валу 42. Например, передаточная каретка 62 может быть установлена с возможностью скольжения на опорный вал 63, установленный в корпусе 12 на кронштейн 61 вала таким образом, чтобы линия действия передаточной каретки была перпендикулярна блоку шестерен поворотных приводных систем. Кронштейн 61 вала выполнен с возможностью жесткой поддержки в пазах или иных элементах внутри корпуса 10. Передающая каретка 62 включает в себя шестерню каретки 64, удерживаемую с возможностью поворота на опорном валу 63, и выполненную с возможностью избирательного зубчатого взаимодействия с шестернями 44 и 46, находясь при этом в приводном взаимодействии с приводной шестерней 82. В конструкции, представленной на ФИГ. 2–5, передаточная каретка 62 функционально прикреплена у сдвигателю или «механизму сдвигания» 70, выполненному с возможностью сдвигания передаточной каретки 62 по оси между «первым приводным положением» и «вторым приводным положением». Например, в одной форме механизм сдвигания 70 включает в себя сдвигающий соленоид 71, удерживаемый внутри корпуса 12 рукоятки 14. Сдвигающий соленоид 71 может представлять собой соленоид с двумя устойчивыми положениями или, например, может представлять собой «двухпозиционный подпружиненный» соленоид. Показанная конструкция, например, включает в себя пружину 72, которая смещает передаточную каретку 62 в дистальном направлении «DD» в первое приводное положение, причем шестерня 64 каретки находится в зубчатом взаимодействии с промежуточной приводной шестерней 46, и также находится в зубчатом соединении с приводной шестерней 82. В этом первом приводном положении активация двигателя 80 приведет к повороту шестерней 82, 46 и 24, что в итоге приведет к повороту первого приводного вала 22. Как будет дополнительно подробно описано далее, сдвигающий соленоид 71 может активироваться пусковым крючком 90, установленным с возможностью поворота на корпусе 12 рукоятки 14, как показано на ФИГ. 2 и 5. В показанном варианте осуществления пусковой крючок 90 поддерживается с возможностью поворота на стволе 92 пускового крючка, установленном в рукоятке 14. Пусковой крючок 90 обычно смещен в неактивированное положение посредством пружины 94 пускового крючка. См. ФИГ. 3. Пусковой крючок 90 установлен с возможностью функциональной активации пускового переключателя 96, функционально установленного на узле 100 платы со схемой управления. В представленном варианте осуществления активация пускового крючка 90 приводит к активации сдвигающего соленоида 71. Как описано ниже более подробно применительно к ФИГ. 61, 63, 64, процессор 7024 рукоятки подает приводной сигнал на сдвигающий соленоид 7032 (71). Таким образом, снова возвращаясь к ФИГ. 2–5, активация пускового крючка 90 приводит к тому, что сдвигающий соленоид 71 тянет передаточную каретку 62 в проксимальном направлении «PD», таким образом переводя шестерню 64 каретки в зубчатое взаимодействие со второй приводной шестерней 44. См. ФИГ. 7. Активация двигателя 80 в то время, когда шестерня 64 каретки находится в зубчатом взаимодействии с приводной шестерней 82 и второй приводной шестерней 44, приведет к повороту второго приводного вала 42 вокруг оси второго приводного вала «SDA». Как можно видеть также на ФИГ. 2–5, сдвигаемый узел 60 трансмиссии также может включать в себя индикаторную систему 74, которая включает в себя пару переключателей 75 и 76, функционально связанных с платой управления 100, а также со световым индикатором 77 трансмиссии. Переключатели 75, 76 предназначены для обнаружения положения передаточной каретки 62, в результате которого управляющая система активирует световой индикатор 77 в зависимости от положения передаточной каретки 62. Например, энергообеспечение на световой индикатор 77 может подаваться, когда передаточная каретка 62 находится в первом приводном положении. Это дает врачу указание на то, что активация двигателя 80 приведет к активации первой приводной системы 20.
Различные хирургические инструменты, описанные в настоящем документе, также могут включать в себя узел 60’ трансмиссии, который по существу идентичен узлу 60 трансмиссии, но также включает в себя блокирующий узел или механизм (в целом обозначенный пунктом 65) для блокировки первой и второй приводной систем 20, 40 для предотвращения их случайного срабатывания, когда такое срабатывание не предусмотрено. Например, на ФИГ. 6A показана альтернативная передаточная каретка 62’, которая включает в себя первый фиксирующий элемент 66 привода и второй фиксирующий элемент привода 68. Первый фиксирующий элемент 66 привода содержит первый взаимодействующий с шестерней элемент или зуб на передаточной каретке 62’, который размещен с возможностью зубчатого взаимодействия со второй приводной шестерней 44, когда шестерня 64 каретки находится в приводном взаимодействии с промежуточной шестерней 46 (т.е. когда узел 60’ трансмиссии находится в первом приводном положении). См. ФИГ. 6B. Следовательно, когда узел 60’ трансмиссии находится в первом приводном положении, первый фиксирующий элемент 66 привода находится в зубчатом взаимодействии со второй приводной шестерней 44, предотвращая ее относительный поворот, когда первый приводной вал 22 поворачивается описанным выше способом. Аналогично, когда узел 60’ трансмиссии находится во втором приводном положении (т.е. шестерня 64 каретки находится в зубчатом взаимодействии со второй приводной шестерней 44), второй фиксирующий элемент 68 привода находится в зубчатом взаимодействии с промежуточной приводной шестерней 46. См. ФИГ. 6C. Следовательно, когда узел трансмиссии 60’ находится во втором приводном положении, второй фиксирующий элемент 68 привода предотвращает поворот промежуточной шестерни 46, также предотвращая поворот первой приводной шестерни 24. По этой причине, когда врач приводит в действие двигатель 80 для активации первой приводной системы 20, вторая приводная система 40 заблокирована на месте. Аналогично, когда врач приводит в действие вторую приводную систему 40, первая приводная система 20 заблокирована на месте.
Систему управления двигателем 80, как описано ниже в настоящем документе применительно к ФИГ. 61, 63, 64, можно запрограммировать таким образом, чтобы она всегда останавливалась в такой ориентации, когда один зуб шестерен 42, 44 был расположен вертикально или в ином заданном положении, в зависимости от ориентации другой соответствующей шестерни. Этот элемент призван избежать сопряжения между зубцами шестерен при сдвигании. При сдвигании блокирующие элементы также сдвигаются и блокируют положение не поворачивающегося блока шестерен. При применении в сочетании с концевым эффектором, включающим в себя конструкцию с кассетой/упором или другую зажимающую конструкцию, еще одним преимуществом от блокирования не поворачивающегося (т.е. без электропитания) блока шестерен является удерживание зажима/упора в стабильном положении при пуске.
Двигатель 80 может представлять собой приводной щеточный двигатель постоянного тока с максимальной скоростью поворота, например, приблизительно 25 000 оборотов в минуту. В других конфигурациях двигатель может включать в себя бесщеточный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой подходящий электрический двигатель, включая двигатели, которые могут быть пригодны к автоклавной стерилизации. Двигатель 80 может получать электропитание от источника питания 84, который в одной форме может содержать блок питания 86, хранящийся с возможностью извлечения в рукоятке 14. Например, как видно на ФИГ. 2–5, блок питания 86 может быть размещен с возможностью извлечения внутри участка пистолетной рукоятки 19 рукоятки 14. Чтобы получить доступ к блоку питания 86, врач снимает съемный колпачок 17, прикрепленный к участку пистолетной рукоятки 19. Блок питания 86 может функционально вмещать в себя несколько батарей (не показаны). Каждая батарея может представлять собой, например, литий-ионную («LI») или другую подходящую батарею. Блок питания 86 предназначен для съемного функционального соединения с узлом 100 платы схемы управления, который также функционально соединен с двигателем 80 и установлен внутри рукоятки 14. В качестве источника питания хирургического инструмента может применяться ряд последовательно подсоединенных элементов питания. Кроме этого, источник питания 84 может быть сменным и/или перезаряжаемым и, по меньшей мере в одном варианте, может включать в себя, например, батареи CR123. Двигатель 80 может активироваться «пусковым переключателем-качели» 110, установленным с возможностью поворота к участку 19 пистолетной части рукоятки 14. Пусковой переключатель-качели 110 выполнен с возможностью активации первого переключателя 112 двигателя, функционально соединенного с платой управления 100. Первый переключатель 112 двигателя может представлять собой нажимной переключатель, приводимый в действие путем поворота пускового переключателя-качели 110 с введением его с ним в контакт. Активация первого переключателя 112 двигателя приводит к активации двигателя 80 так, что приводная шестерня 82 поворачивается в первом поворотном направлении. Второй переключатель 114 двигателя также соединен с платой схемы 100 и установлен с возможностью избирательного контакта с пусковым переключателем-качели 110. Активация второго переключателя 114 двигателя приводит к активации двигателя 80 так, что приводная шестерня 82 поворачивается во втором направлении. Например, в процессе применения полярность напряжения, обеспечиваемая источником питания 84, позволяет электрическому двигателю 80 работать в направлении по часовой стрелке, причем полярность напряжения, приложенная к электрическому двигателю батареей, может быть изменена на обратную для работы электрического двигателя 80 в направлении против часовой стрелки. Как и в других формах, описанных в настоящем документе, рукоятка 14 также может включать в себя датчик, выполненный с возможностью обнаруживать направления, в которых перемещаются приводные системы. Один конкретный вариант осуществления двигателя 80 описан в настоящем документе применительно к ФИГ. 61, 63, 64, где описан бесщеточный двигатель постоянного тока 7038. Двигатель постоянного тока 7038 может быть пригодным для автоклавирования.
На ФИГ. 8–12 представлена другая форма хирургического инструмента 10’, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 10’, такие же, как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. Компоненты хирургического инструмента 10’, которые могут быть сходны в работе, но не идентичны соответствующим компонентам хирургического инструмента 10, будут обозначаться теми же номерами компонентов в сочетании “’’’ или в некоторых случаях “””. Как можно видеть, например, на ФИГ. 8, ось первого приводного вала «FDA» смещена и параллельна или по существу параллельна оси второго приводного вала «SDA». Как показано, например, на ФИГ. 9, узел 60 трансмиссии и, более конкретно, передаточная каретка 62” может быть выполнена с возможностью сдвигания вручную посредством тягового узла 120, функционально соединенного с пусковым крючком 90’. Как можно видеть, например, на этом чертеже, тяговый узел 120 включает в себя первую тягу 122 трансмиссии, которая функционально соединена с пусковым крючком 90’, проходит по оси и функционально соединена с вилкой 124 трансмиссии. Вилка 124 трансмиссии имеет подвижное штифтовое соединение с передаточной кареткой 62”. Таким образом, приведение в действие пускового крючка 90’ приводит к осевому перемещению передаточной каретки 62”. Следовательно, понятно, что тяговый узел 120 по существу осуществляет активирующее перемещение, аналогично перемещению сдвигающего соленоида 71, который был описан выше. В контексте такого варианта осуществления, применительно к перемещению передаточной каретки 62”, термин «сдвигаемый вручную» относится к перемещению передаточной каретки между первым и вторым приводным положениями без применения электричества или иных устройств питания, за исключением нажатия на пусковой крючок 90’.
Как видно также на ФИГ. 8–12, вторая приводная шестерня 44’ отделена от промежуточной шестерни 46’ на втором приводном валу 42’ посредством разделителя 45. Вторая приводная шестерня 44’ закреплена шпонкой или иным способом прикреплена без возможности поворота ко второму приводному валу 42’, тогда как промежуточная приводная шестерня 46’ установлена с возможностью поворота на второй приводной вал 42’ и свободно поворачивается относительно него. В одной форме, например, дистальная приводная шестерня 130 удерживается в зубчатом взаимодействии с промежуточной приводной шестерней 46’. Аналогично, проксимальная приводная шестерня 136 удерживается в зубчатом взаимодействии со второй приводной шестерней 44’. Однако в такой конструкции передаточная каретка 62” также включает в себя расположенный по центру узел 140 передаточных шестерен, функционально соединенный с передаточной кареткой 62’ с возможностью продвижения по оси вместе с ней. Как показано на ФИГ. 8–12, узел 140 передаточных шестерен включает в себя расположенную по центру сдвигающую приводную шестерню 142, которая находится в скользящем зубчатом взаимодействии с приводной шестерней 82 двигателя. Следовательно, поворот приводной шестерни 82 двигателя приводит к повороту сдвигающей приводной шестерни 142. Кроме этого, к сдвигающей приводной шестерне 142 присоединена проходящая проксимально коническая приводная шестерня 144, предназначенная для избирательного зубчатого взаимодействия с гнездом 146 проксимальной шестерни, прикрепленным к проксимальной приводной шестерне 136. Аналогично, проходящая дистально коническая приводная шестерня 148 предназначена для избирательного зубчатого взаимодействия с гнездом 150 дистальной шестерни, прикрепленным к дистальной приводной шестерне 130.
Когда врач желает активировать первую приводную систему 20, врач перемещает пусковой крючок 90’ для перемещения вдоль оси узел 140 передаточных шестерен, вводя проходящую дистально коническую приводную шестерню 148 в прилегающее зубчатое взаимодействие с гнездом 150 дистальной шестерни, прикрепленным к дистальной приводной шестерне 130. См. ФИГ. 8-10. В этом положении работа двигателя 80 приведет к повороту приводной шестерни 82 двигателя, сдвигающей приводной шестерни 142, дистальной приводной шестерни 130, промежуточной приводной шестерни 46’, первой приводной шестерни 24 и первого приводного вала 22. Когда врач желает активировать вторую приводную систему 40, врач перемещает пусковой крючок 90’ в положение, показанное на ФИГ. 11 и 12, таким образом вводя проходящую проксимально коническую приводную шестерню 144 в прилегающее зубчатое взаимодействие с гнездом 146 проксимальной шестерни, прикрепленным к проксимальной приводной шестерне 136. В этом положении работа двигателя 80 приведет к повороту приводной шестерни 82, сдвигающей приводной шестерни 142, проксимальной приводной шестерни 136, второй приводной шестерни 44’ и второго приводного вала 42’. Как можно видеть также на ФИГ. 8–12, можно применять датчики 152 и 154 для детектирования положения передаточной каретки 62”, что будет дополнительно подробно описано ниже. Например, датчики 152 и 154 могут быть реализованы в виде датчиков Холла 7028, описанных ниже применительно к ФИГ. 61, 63, 64.
На ФИГ. 13–16 представлена другая форма хирургического инструмента 310 с приводом, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 310, такие же, как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. В такой конструкции первая и вторая приводные системы 20, 40 приводятся в действие двигателем 80 посредством уникального и нового «сдвигаемого» узла 360 трансмиссии. Первая приводная система 20 включает в себя первый приводной вал 22, который имеет первый приводной шкив 324, закрепленный на нем шпонкой или иным способом без возможности поворота. Аналогично, вторая приводная система 40 включает в себя второй приводной вал 42, который имеет второй приводной шкив 344, закрепленный на нем шпонкой или иным способом без возможности поворота. Как можно видеть, например, на ФИГ. 14, ось первого приводного вала «FDA» смещена и параллельна или по существу параллельна оси второго приводного вала «SDA».
Как показано на ФИГ. 13–16, в одной форме двигатель 80 включает в себя первый шкив 382 двигателя, прикрепленный без возможности поворота с валом двигателя 80. Первый шкив 382 двигателя приводит в движение первый приводной ремень 385, который принимается на первом приводном шкиве 324. Кроме этого, второй шкив 384 двигателя установлен без возможности поворота к валу двигателя и функционально удерживает на себе второй приводной ремень 387. Второй приводной ремень 387 также принимается на втором приводном шкиве 344 на втором приводном валу 42. Первый и второй приводные ремни 385, 387 могут представлять собой, например, V-образные ремни.
Инструмент 310 также включает в себя узел 360 трансмиссии, содержащий передаточную каретку 362, установленную с возможностью продвижения по оси внутри корпуса инструмента. Передаточная каретка 362 функционально взаимодействует с промежуточной кареткой 374, удерживаемой с возможностью латерального перемещения в ответ на контакт с передаточной кареткой 362 в процессе перемещения передаточной каретки 362 по оси посредством сдвигающего соленоида 71. Вспомогательная каретка 374 включает в себя первый вспомогательный шкив 375 и второй вспомогательный шкив 376, установленные на ней. В показанном варианте осуществления пружина 72 смещает передаточную каретку 362 в дистальном направлении «DD» в первое приводное положение, в котором передаточная каретка 362 заставляет вспомогательную каретку 374 переместиться в первое латеральное положение «FLD», и это приводит к тому, что первый вспомогательный шкив 375 удаляет слабину первого приводного ремня 385. В этом положении второй вспомогательный шкив 376 размещен за пределами взаимодействия со вторым приводным ремнем 387. Следовательно, работа двигателя 80 будет приводить к повороту первого приводного вала 22. Хотя второй шкив 384 двигателя также будет поворачиваться при активации двигателя 80, слабина второго приводного ремня 387 предотвращает передачу этого поворотного перемещения на второй приводной шкив 344. Таким образом, поворотное перемещение не будет передано на вторую приводную систему 40. Как описывалось выше, сдвигающий соленоид 71 может активироваться пусковым крючком 90. Однако в альтернативных конструкциях сдвигающий соленоид 71 также можно заменить активируемым вручную тяговым узлом, например, описанного выше типа. В представленном варианте осуществления активация пускового крючка 90 заставляет сдвигающий соленоид 71 тянуть передаточную каретку 362 в проксимальном направлении «PD», таким образом смещая вспомогательную каретку 374 латерально во втором латеральном направлении «SLD» и вводя второй вспомогательный шкив 376 в контакт со вторым приводным ремнем 387 для устранения его слабины. Такое латеральное перемещение вспомогательной каретки 374 также перемещает первой вспомогательный шкив 375 за пределы взаимодействия с первым приводным ремнем 385, допуская ослабление первого приводного ремня 385. Следовательно, в этом втором приводном положении активация двигателя 80 приводит к активации второй приводной системы 40. Слабина первого приводного ремня 385 препятствует передаче поворотного перемещения на первую приводную систему 20.
Узел 360 трансмиссии может обеспечить ряд очевидных преимуществ. Например, применение V-образных ремней устраняет необходимость в сцепляющихся шестернях и выравнивании шестерней механизмом сцепления. Более того, такую конструкцию трансмиссии можно активировать и деактивировать под нагрузкой. Кроме этого, для высвобождения из взаимодействия и взаимодействия с узлом 360 трансмиссии требуется небольшое смещение.
На ФИГ. 17-21 представлена другая форма хирургического инструмента 410 с приводом, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 410, такие же, как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. В такой конструкции первая и вторая приводные системы 20, 40 приводятся в действие двигателем 480 посредством уникального и нового «сдвигаемого» узла 460 трансмиссии. Первая приводная система 20 включает в себя первый приводной вал 22, который имеет первый приводной шкив 424, закрепленный на нем шпонкой или иным способом без возможности поворота. Аналогично, вторая приводная система 40 включает в себя второй приводной вал 42, который имеет второй приводной шкив 444, закрепленный на нем шпонкой или иным способом без возможности поворота. Как можно видеть, например, на ФИГ. 18, ось первого приводного вала «FDA» смещена и параллельна или по существу параллельна оси второго приводного вала «SDA».
Как показано на ФИГ. 19, в одной форме двигатель 480 включает в себя шлицованный приводной вал 481, выполненный с возможностью вдвигаемого взаимодействия с узлом передаточного вала 490, выполненного с возможностью взаимодействия с передаточной кареткой 462 так, что осевое перемещение передаточной каретки 462 приводит к осевому перемещению узла передаточного вала 490 на шлицованном приводном валу 481. Как можно видеть на ФИГ. 19, внутри узла передаточного вала 490 имеется шлицованный канал 491 для вдвигаемого и функционального получения в нем шлицованного приводного вала 481. Кроме этого, на дистальном конце узла передаточного вала 490 сформировано дистальное соединительное кольцо 492. Дистальное соединительное кольцо 492 выполнено с кольцевой канавкой 493, которая выполнена с возможностью принимать в ней двух противолежащих штифтов 465 вилки, прикрепленных к вилочному участку 464 передаточной каретки 462. Такая конструкция служит для соединения передаточной каретки 462 с узлом передаточного вала 490, с возможностью для узла передаточного вала 490 поворачиваться относительно передаточной каретки 462.
Как показано на ФИГ. 19, первый шкив 482 двигателя предназначен для избирательного приводного соединения с узлом передаточного вала 490. Как видно, например, на ФИГ. 19, узел передаточного вала 490 имеет опорное кольцо 494, образованное на его проксимальном конце, размер которого позволяет его принимать с возможностью скольжения и поворота в канале 483 первого шкива 482 двигателя. Кроме этого, первый шкив 482 двигателя также включает в себя звездообразную проксимальную приводную полость 488, выполненную с возможностью зубчатого взаимодействия с имеющей комплементарную форму приводной частью 495, сформированной на узле передаточного вала 490. Первый шкив 482 двигателя приводит в движение первый приводной ремень 485, который также принимается на первом приводном шкиве 424. Хирургический инструмент 410 также включает в себя второй шкив 484 двигателя, имеющий канал 489 звездообразной формы, выполненный с возможностью зубчатого взаимодействия с вводимой в него приводной частью 495 узла передаточного вала 490. На втором шкиве 484 двигателя функционально удерживается второй приводной ремень 487, который также принимается на втором приводном шкиве 444.
Как указано выше, инструмент 410 также включает в себя узел 460 трансмиссии, включающий в себя передаточную каретку 462, удерживаемую внутри корпуса инструмента с возможностью продвижения по оси. Передаточная каретка 462 функционально взаимодействует с узлом передаточного вала 490, также перемещая узел передаточного вала 490 вдоль оси, тогда как узел передаточного вала 490 остается во взаимодействии с валом 481 двигателя. На ФИГ. 20 показан сдвигающий соленоид 71 в неактивированном положении. Как видно на этом чертеже, передаточная каретка 462 переместила узел передаточного вала 490 в крайнее проксимальное положение, которое также может быть названо «первым приводным положением», в котором приводная часть 495 находится в приводном взаимодействии со звездообразным каналом 488 в первом шкиве 482 двигателя. Таким образом, поворот вала 481 двигателя приведет к повороту узла передаточного вала 490 и первого шкива 482 двигателя. Поворот первого шкива 482 двигателя приведет к повороту первого приводного ремня 485, которое в итоге приведет к повороту первого приводного вала 22. Когда узел передаточного вала 490 находится в первом приводном положении, узел передаточного вала 490 свободно поворачивается относительно второго шкива 484 двигателя. Следовательно, когда активируется первая приводная система 20, вторая приводная система 40 остается неактивированной. При активации сдвигающего соленоида 71 с переходом в положение, показанное на ФИГ. 21 (путем активации пускового крючка 90), передаточная каретка 462 перемещает узел передаточного вала 490 в крайнее дистальное положение на валу 481 двигателя, которое также может быть названо «вторым приводным положением». Как видно на ФИГ. 21, когда узел передаточного вала 490 переходит во второе приводное положение, его приводной участок 495 входит в зубчатое взаимодействие со звездообразным каналом 489 во втором шкиве 484 двигателя. Следовательно, поворот вала 481 двигателя будет приводить к повороту второго шкива 484 двигателя. Поворот второго шкива 484 двигателя приведет к повороту второго приводного ремня 487, которое приведет к повороту второго приводного вала 42. В этом втором приводном положении узел передаточного вала 490 свободно поворачивается внутри первого шкива 482 двигателя. Следовательно, когда активируется вторая приводная система 40, первая приводная система 20 будет неактивирована.
На ФИГ. 22–27 представлены другой двигатель, узел трансмиссии и первая и вторая приводные системы, которые могут применяться с различными хирургическими инструментами, описанными в настоящем документе. Показанная конструкция включает в себя двигатель 580, имеющий вал 581 двигателя. См. Рис. 23 и 24. Приводная шестерня 582 двигателя или «центральная шестерня» 582 прикреплена без возможности поворота к валу 581 двигателя для поворота вместе с ним. Конструкция дополнительно включает в себя 570 узел планетарных шестерней, включающий в себя три планетарные шестерни 572, удерживаемые с возможностью поворота между дистальным несущим кронштейном 573 и проксимальным несущим кронштейном 574. Проксимальный несущий кронштейн 574 удерживается на втулочной части центральной шестерни 582, так что центральная шестерня 582 может поворачиваться относительно проксимального несущего кронштейна 574. Дистальный несущий кронштейн 573 присоединен ко второму приводному валу 542 второй приводной системы 40 таким образом, что поворот дистального несущего кронштейна 573 будет приводить к повороту второго приводного вала 542 второй приводной системы 40. Три планетарные шестерни 572 удерживаются в зубчатом взаимодействии с узлом 575 кольцевой шестерни. Более конкретно, планетарные шестерни 572 находятся в зубчатом взаимодействии с внутренней кольцевой шестерней 576 узла 575 кольцевой шестерни. Узел 575 кольцевой шестерни дополнительно включает в себя внешнюю кольцевую шестерню 577, находящуюся в зубчатом взаимодействии с первой приводной шестерней 524, соединенной с первым приводным валом 522 первой приводной системы 20. Как можно видеть, например, на ФИГ. 24, ось первого приводного вала «FDA» смещена и параллельна или по существу параллельна оси второго приводного вала «SDA».
Как видно на ФИГ. 23, конструкция дополнительно включает в себя соленоид 71, с которым может приводиться в действие пусковым крючком различными способами, описанными в настоящем документе. В этой конструкции узел 560 трансмиссии прикреплен к валу 73 соленоида 71. На ФИГ. 24 показан узел 560 трансмиссии в первом положении привода. В одной форме узел 560 трансмиссии включает в себя блокирующий узел, по существу обозначенный номером 590, который содержит первый или проксимальный участок 592 фиксирующего утолщения и вторую или дистальную часть 594 фиксирующего утолщения на узле 560 трансмиссии. Как видно на этом чертеже, узел 560 трансмиссии расположен таким образом, что проксимальный участок 592 фиксирующего утолщения находится во взаимодействии с проксимальным несущим кронштейном 574. В таком первом приводном положении проксимальный участок 592 фиксирующего утолщения препятствует повороту узла 570 планетарных шестерней как единого целого с центральной шестерней 582. Однако поворот центральной шестерни 582 приводит к повороту планетарных шестерней 572. Поворот планетарных шестерней 572 приводит к повороту узла 575 кольцевой шестерни. Поворот узла 575 кольцевой шестерни приводит к повороту первой приводной шестерни 524 и первого приводного вала 522. Поскольку поворот проксимального несущего кронштейна 574 предотвращается, поворот дистального несущего кронштейна 573 также предотвращается. Следовательно, поворот второго приводного вала 544 также предотвращается, в то время как первый приводной вал 522 поворачивается. Для смещения соленоида 71 (и прикрепленного к нему узла 560 трансмиссии) в это «первое приводное положение» можно применять пружину (не показана). Когда врач желает активировать вторую приводную систему 40, можно активировать соленоид 71 посредством пускового крючка, как описано выше, и переместить вал 73 соленоида в положение, показанное на ФИГ. 25. Когда узел трансмиссии 560 находится в этом «втором пусковом положении», дистальный участок 594 фиксирующего утолщения входит в удерживающее взаимодействие с узлом 575 кольцевой шестерни, предотвращается его поворот. Таким образом, при повороте центральной шестерни 582 держатель планетарных шестерен (т.е. дистальный несущий кронштейн 573 и проксимальный несущий кронштейн 574) также будет поворачиваться. Планетарные шестерни 572 будут поворачиваться внутри зафиксированной внутренней кольцевой шестерни 576. Такое поворотное перемещение будет передаваться на второй приводной вал 542, в то время как первый приводной вал 522 останется неактивированным.
На ФИГ. 28 показана другая форма хирургического инструмента 610 с приводом, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 610, такие же, как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. Как можно видеть, например, на ФИГ. 28, ось первого приводного вала «FDA» смещена и параллельна или по существу параллельна оси второго приводного вала «SDA». Такая конструкция содержит двигатель 680, который имеет два независимо активируемых вала 681, 683 двигателя. Двигатель 680 может управляться посредством различных типов конструкции пускового крючка, описанных в настоящем документе, так, чтобы активация пускового крючка одним способом заставляла двигатель 680 поворачивать первый вал 681 двигателя, а активация пускового крючка другим способом заставляла двигатель 680 поворачивать второй вал 683 двигателя. В такой конструкции первая шестерня 682 двигателя установлена на первый вал 681 двигателя и удерживается в зубчатом взаимодействии с промежуточной шестерней 646. Промежуточная шестерня 646 функционально удерживается в зубчатом взаимодействии с первой приводной шестерней 624, установленной на первый приводной вал 622 первой приводной системы 620. Следовательно, активация первого вала 681 двигателя будет приводить к активации первой приводной системы 620. Аналогично, вторая шестерня 684 двигателя установлена на втором валу 683 двигателя и удерживается в зубчатом взаимодействии со второй приводной шестерней 644, установленной на втором приводном валу 642 второй приводной системы 640. По этой причине активация второго вала 683 двигателя будет приводить к активации второй приводной системы 640.
На ФИГ. 29 показана другая форма хирургического инструмента 710 с приводом, которая может быть идентична хирургическому инструменту 10, за исключением указанных ниже отличий. Компоненты хирургического инструмента 710, такие же, как компоненты вышеописанного хирургического инструмента 10, будут обозначены теми же номерами. Как можно видеть, например, на ФИГ. 29, ось первого приводного вала «FDA» смещена и параллельна или по существу параллельна оси второго приводного вала «SDA». В такой конструкции первая и вторая приводные системы 720, 740 приводятся в действие двигателем 780 посредством уникального и нового «переключаемого» узла 760 трансмиссии. Первая приводная система 720 включает в себя первый приводной вал 722, который имеет первую приводную шестерню 724, закрепленную на нем шпонкой или иным способом без возможности поворота. Аналогично, вторая приводная система 740 включает в себя второй приводной вал 742, который имеет вторую приводную шестерню 744, закрепленную на нем шпонкой или иным способом без возможности поворота. Двигатель 780 включает в себя шестерню 782 двигателя, прикрепленную без возможности поворота к валу 781 двигателя 780.
В представленном варианте осуществления второй двигатель 750 применяется для сдвигания узла 760 трансмиссии, как будет дополнительно подробно описано ниже. Второй двигатель 750 может управляться, например, посредством различных конструкций пускового крючка и переключателей, описанных в настоящем документе. Второй двигатель 750 может управляться способом, сходным с управлением двигателем 7038, как описано ниже более подробно применительно к ФИГ. 61, 63, 64. Как видно на ФИГ. 29, первый передающий шкив 753 соединен шпонкой или иным образом прикреплен без возможности поворота к валу 752 двигателя. Первый поворотный вал 754 установлен с возможностью поворота внутри корпуса 12 рукоятки 14. Первый поворотный вал образует ось поворота «PA». Второй передающий шкив 755 установлен без возможности поворота на первом поворотном валу 754, и передающий ремень 756 установлен на первый и второй передающие шкивы 753, 755. В одной форме сдвигаемый узел 760 трансмиссии включает в себя передающую тягу 762, прикрепленную к первому поворотному валу 754. Кроме этого, к передающей тяге 762 прикреплен вспомогательный вал 763, на котором функционально установлена промежуточная шестерня 764. Сдвигаемый узел 760 трансмиссии выполнен с возможностью перемещения между первым приводным положением и вторым приводным положением. Для перемещения сдвигаемого узла 760 трансмиссии в первое приводное положение врач активирует второй двигатель 750 для вращения поворотного вала 763 и промежуточной шестерни 764 вокруг оси поворота PA, так что она входит в зубчатое взаимодействие с шестерней 782 двигателя и первой приводной шестерней 724. В этом положении активация двигателя 780 приведет к активации первой приводной системы 720. Когда врач желает активировать вторую приводную систему 740, он активирует второй двигатель 750 для поворота промежуточной шестерни 764 вокруг оси поворота PA с введением в зубчатое взаимодействие с шестерней 782 двигателя и второй приводной шестерней 744. В этом положении активация двигателя 780 приводит к активации второй приводной системы 740. Одним из преимуществ, обеспечиваемых такой конструкцией, является то, что точная ориентация шестерен не требуется. При отклонении промежуточной шестерни 764 в нужное положение она может поворачиваться и автоматически находить сопрягающийся зубец.
На ФИГ. 30–32 представлен новый уникальный блок двигателей 800, который можно устанавливать в корпусах описанных в настоящем документе типов. Блок двигателей 800 может включать в себя отдельную конструкцию-кожух 801, функционально удерживающую первый двигатель 802 с первым валом 803 двигателя, которые образуют первую приводную систему 804. Блок двигателей 800 может включать в себя второй двигатель 805 со вторым валом 806 двигателя, которые образуют вторую приводную систему 807. Как можно видеть, например, на ФИГ. 8, ось первого приводного вала «FDA» смещена и параллельна или по существу параллельна оси второго приводного вала «SDA». Блок 800 может дополнительно включать в себя узел 808 платы со схемой управления, которая контактирует с 808A, которая функционально соединяется с соответствующими контактами на узле платы, установленном или иным образом удерживаемом внутри корпуса инструмента, и сообщаются с системой управления инструмента. Корпус дополнительно может включать в себя электрические контакты 808B, выполненные с возможностью функционального соединения с соответствующими электрическими контактами на присоединенном к нему концевом эффекторе.
Как показано на ФИГ. 1, модульная хирургическая система 2 может включать в себя различные иные конструкции хирургических концевых эффекторов 1000, 2000 и 3000, которые могут использоваться в сочетании с различными описанными в настоящем документе хирургическими инструментами. Как будет дополнительно подробно описано ниже, каждый из концевых эффекторов 1000, 2000, 3000 включает в себя две отдельные «первую и вторую приводные системы концевого эффектора», выполненные с возможностью функционального соединения с первой и второй приводными системами хирургического инструмента, чтобы принимать от них управляющие перемещения. Каждая приводная система концевого эффектора выполнена с возможностью линейного перемещения соответствующих активирующих компонентов концевого эффектора из первых или начальных линейных положений во вторые или конечные линейные положения в ответ на приложение соответствующих поворотных перемещений к приводным системам концевого эффектора хирургическим инструментом, к которому концевой эффектор функционально прикреплен. Активирующие компоненты концевого эффектора прилагают линейные активирующие перемещения к различным компонентам концевого эффектора, расположенные в инструментальной головной части концевого эффектора, с целью выполнения различных хирургических процедур. Как будет дополнительно подробно описано ниже, в концевых эффекторах применяются уникальные компоненты и системы, помогающие врачу соединить первый и второй приводные валы хирургического инструмента с соответствующими приводными валами концевого эффектора. Поскольку четыре приводных вала соединяются вместе по существу одновременно, можно применять различные соединительные конструкции и средства управления, чтобы валы оказались в верных положениях или «приблизительно верных положениях», что будет способствовать такому одновременному соединению приводных систем.
Как показано на ФИГ. 33, одну форму механической соединительной системы 50 можно применять для способствования одновременному разъемному и функциональному соединению двух приводных систем в хирургическом инструменте с соответствующими «ведомыми» валами в концевых эффекторах. Соединительная система 50 может содержать штырьковые соединители, которые могут прикрепляться к приводным валам в хирургическом инструменте, и соответствующие гнездовые соединители, прикрепленные к ведомым валам в хирургическом концевом эффекторе. Например, на ФИГ. 9 показаны штырьковые соединители 51, прикрепленные к первому и второму приводным валам 22, 42 посредством зажимных винтов 52. Снова обращаясь к ФИГ. 33, каждый из штырьковых соединителей 51 выполнен с возможностью получения с передачей приводного усилия в соответствующих гнездовых соединителях 57, которые также могут быть прикреплены к приводным валам внутри концевого эффектора. В одной форме каждый штырьковый соединитель 51 включает в себя по меньшей мере три приводных ребра 53, равномерно распределенных вокруг центрального участка 54 штырькового соединителя 51. В показанном варианте осуществления, например, пять приводных ребер 53 равномерно распределены вокруг центрального участка 54. Каждое приводное ребро 53 имеет заостренный дистальный конец 55. Каждое приводное ребро 53 может быть выполнено с несколько закругленными краями 56 для способствования их вставке в соответствующие желоба 58 гнезд внутри гнездового соединителя 57. Каждый желоб 58 гнезда имеет конусовидный проксимальный входной участок 59 для способствования вставке в него соответствующего приводного ребра 53. Заостренный дистальный конец 55 каждого приводного ребра 53 в сочетании с конусовидным входом 59 каждого из желобов 58 гнезда будет компенсировать некоторую невыровненность между штырьковым соединителем 51 и соответствующим гнездовым соединителем 57 в процессе соединения. Кроме того, закругленные края 57 на заостренном дистальном конце 55 также помогают скользящей вставке штырькового соединителя 51 в соответствующий гнездовой соединитель 58.
В одной форме по меньшей мере один из штырьковых соединителей 51 прикреплен с возможностью перемещения к соответствующему первому или второму приводному валу хирургического инструмента или соответствующему ему первому или второму ведомому валу хирургического концевого эффектора. Более конкретно, штырьковый соединитель 51 может быть прикреплен с возможностью радиального или углового продвижения к валу на «первую заданную величину радиального перемещения» по валу. Это может быть реализовано, например, посредством конструкции со шпонкой и шпоночным пазом, размер которых относительно друг друга способствует некоторой величине радиального или углового продвижения штырькового соединителя 51 по валу. Иными словами, например, на валу может быть образована или иным образом установлена на него шпонка, размер которой меньше соответствующего шпоночного паза, образованного в штырьковом соединителе 51 так, что шпонка может двигаться внутри шпоночного паза и устанавливать первую заданную величину радиального продвижения. Эта первая заданная величина радиального продвижения предпочтительно является достаточной для передвижения соединителя назад или вперед. Для штырькового соединителя 51 с пятью ребрами 53, например, первая заданная величина радиального продвижения может составлять, например, 5–37 градусов. Могут существовать варианты осуществления, в которых первый заданный диапазон радиального продвижения может составлять менее 5°, а предпочтительно, например, не более 4°. Такой диапазон радиального или углового продвижения может быть достаточным, если, например, соответствующий гнездовой соединитель 57 жестко зафиксирован на соответствующем приводном валу и иначе не способен ни к какому радиальному продвижению. Однако если и штырьковый, и гнездовой соединители имеют способность к радиальному или угловому продвижению, такой диапазон можно уменьшить на 50%, обеспечивая каждому соединителю (штырьковому и соответствующему гнездовому соединителю) диапазон продвижения приблизительно 3–16 градусов. Величина радиального или углового продвижения, на которую гнездовой соединитель 57 может перемещаться на соответствующем валу, в настоящем документе может называться «второй заданной величиной радиального продвижения». Гнездовые соединители 57 также могут прикрепляться к соответствующим приводным валам конструкцией со шпонкой и шпоночным пазом, как описано выше, что обеспечивает желаемую вторую заданную величину радиального продвижения. Могут существовать варианты осуществления, в которых второй заданный диапазон радиального продвижения может составлять менее 5°, а предпочтительно, например, не более 4°.
Возможны различные комбинации и конструкции установки штырьковых соединителей и гнездовых соединителей. Например, один или оба штырьковых соединителя могут быть установлены с возможностью перемещения к соответствующим приводным валам хирургического инструмента (или ведомым валам хирургического концевого эффектора) различными способами, описанными в настоящем документе Аналогично, один или оба гнездовых соединителя могут быть установлены с возможностью перемещения к соответствующим ведомым валам концевого эффектора (или приводным валам хирургического инструмента) различными способами, описанными в настоящем документе. Например, на одном из первого и второго приводных валов штырьковый соединитель может быть установлен с возможностью перемещения. Другой штырьковый соединитель, прикрепленный к другому приводному валу, может быть установлен на нем без возможности перемещения. Гнездовой соединитель на ведомом валу, который соответствует подвижно установленному штырьковому соединителю, может быть прикреплен к ведомому валу без возможности перемещения, а гнездовой соединитель, установленный на другой ведомый вал и соответствующий закрепленному без возможности перемещения соединителю, может быть установлен на ведомому валу с возможностью перемещения. Таким образом, один из штырькового и гнездового соединителей «соединительной пары» выполнен с возможностью перемещения. Термин «соединительная пара» обозначает штырьковый соединитель и соответствующий гнездовой соединитель, которые выполнены с возможностью соединения вместе с целью функционального соединения приводного вала хирургического инструмента с соответствующим ведомым валом концевого эффектора. В других конструкциях и штырьковый соединитель, и гнездовой соединитель соединительной пары могут быть соединены с соответствующими валами с возможностью перемещения.
Такая конструкция соединителей служит, например, для создания небольшого углового запаса между соединительными компонентами, чтобы компоненты могли немного поворачиваться для достаточного выравнивания, что позволяет одновременно выровнять соединительные компоненты, прикрепленные к двум отдельным поворотным приводным механизмам. Кроме того, возможно наличие достаточного бокового зазора или запаса в приводных механизмах для обеспечения процесса соединения. Такой боковой зазор или запас может быть реализован формированием шпонок и шпоночных пазов в шестернях, соединителях и/или сопрягающих валах с целью способствования возможности такого небольшого поворота компонентов. Кроме этого, применительно к различным сдвигаемым узлам трансмиссии можно применять переключающую конструкцию, которая может активировать двигатель и вызывать небольшой поворот приводных валов с целью соединения.
Этот и другие способы управления можно применять для того, чтобы обеспечить нахождение приводных валов в хирургических инструментах в нужных положениях, что способствует их соединению с соответствующими приводными валами в концевых эффекторах. Эта уникальная новая система 50 механического соединения служит для обеспечения дополнительной гибкости в процессе соединения, позволяя соединить приводные валы в том случае, когда имеется некоторая невыровненность между соответствующими валами. Следует понимать, что хотя в различных вариантах осуществления, описанных в настоящем документе, показаны штырьковые соединители 51, прикрепленные к приводным валам внутри хирургического инструмента, и гнездовые соединители 58, прикрепленные к приводным валам концевого эффектора, штырьковые соединители 51 могут быть прикреплены к приводным валам концевого эффектора, а гнездовые соединители 58 могут быть прикреплены к приводным валам инструмента.
На ФИГ. 34–37 представлен хирургический концевой эффектор 1000, содержащий хирургический режущий и сшивающий инструмент того типа, который обычно называется «открытым линейным» сшивающим инструментом. Различные формы таких открытых линейных сшивающих устройств описаны, например, патенте США № 5,415,334, озаглавленная «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ И КАССЕТА СО СКОБКАМИ», и в патенте США № 8,561,870, озаглавленном «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ», все содержимое которых включается в настоящий документ путем ссылки. Концевой эффектор 1000 содержит корпус 1010 концевого эффектора, который может быть изготовлен из корпусных сегментов 1012, 1014, соединенных вместе с возможностью извлечения винтами, захватами, защелками и т.п. Из корпуса 1010 концевого эффектора выступают нижняя бранша 1020 и верхняя бранша 1040, которые в совокупности могут образовывать инструментальную головку 1004 концевого эффектора. Нижняя бранша 1020 содержит раму 1022 нижней бранши, выполненную с возможностью функционального удерживания внутри нее кассеты 1060 с хирургическими скобками. Такие кассеты с хирургическими скобками хорошо известны специалистам в данной области и, следовательно, не будут описываться подробно в настоящем документе. Если коротко, кассета с хирургическими скобками 1060 может содержать корпус кассеты 1062, в котором выполнены ряды гнезд 1066 для скоб с боковых сторон от продольного паза 1068, расположенного по центру корпуса кассеты 1062. Паз 1068 выполнен с возможностью обеспечения продольного продвижения по нему режущего элемента 1090, как будет дополнительно подробно описано далее. Хирургическая скобка или скобки (не показаны) удерживаются в гнездах 1066 для скоб на выталкивающих скобки элементах (не показаны), которые выполнены с возможностью перемещения вверх внутри соответствующего гнезда 1066 в процессе пуска. Кассета 1060 со скобками может быть выполнена с возможностью удаления из рамы 1022 нижней бранши и замены другой, неизрасходованной кассетой, создавая возможность многоразового использования концевого эффектора 1000. Однако концевой эффектор 1000 также может быть предназначен для одноразового применения.
Как показано на ФИГ. 36, рама 1022 нижней бранши может быть выполнена из металлического материала и иметь U-образную дистальную часть 1024, выполненную с возможностью принимать кассету 1060 с хирургическими скобками. Боковые стенки 1026 U-образного дистального участка 1024 могут иметь дистальный конец 1028, выполненный с возможностью высвобождаемого и удерживающего взаимодействия с участком кассеты 1060 с хирургическими скобками. Корпус 1062 кассеты со скобками может также иметь элементы 1064 взаимодействия, выполненные с возможностью разъемного взаимодействия с выступающими участками 1030 стенки рамы 1022 нижней бранши. Концевой эффектор 1000 дополнительно содержит верхнюю браншу 1040, включающую участок упора 1042. Участок упора 1042 может включать в себя нижнюю сторону (не показана) со множеством углублений для формирования скоб на ней. Верхняя бранша 1040 дополнительно включает в себя проксимальный участок корпуса 1044, имеющий дистальный штифт 1046 поворотного механизма, проходящий через него. Концы дистального штифта 1046 поворотного механизма, латерально выступающие из проксимального конца проксимального участка 1044 корпуса принимаются с возможностью поворота в отверстиях 1032 поворотного механизма в нижней бранше 1020. Штифт 1046 поворотного механизма образует ось крепления AA-AA, вокруг которой вращается проксимальный конец верхней бранши 1040 относительно нижней бранши 1020 так, что участок упора 1042 выполнен с возможностью перемещения между открытым положением, отстоящим от кассеты 1060 со скобками, установленной в нижней бранше 1020, и закрытым положением, смежным с кассетой 1060 со скобками и/или тканью, расположенной между ними. Концевой эффектор 1000 может дополнительно включать в себя поперечную ось 1050 поворота, входящую в карманы 1034, образованные в выступающих стенках 1030 нижней бранши 1020, и установленную внутри отверстий 1016 в частях корпуса 1012, 1014. Ось поворота 1050 может служить осью поворота или поверхностью, вокруг которой вращается участок 1042 упора.
Перемещением участка 1042 упора между открытым и закрытым положениями управляет первая приводная система концевого эффектора, также называемая здесь закрывающей системой концевого эффектора 1070. В одном варианте, например, закрывающая система концевого эффектора 1070 включает в себя челнок закрытия 1072, проходящий вокруг проксимального участка корпуса 1024 нижней бранши 1020. Челнок закрытия 1072 может также называться «первым исполнительным механизмом концевого эффектора». Челнок закрытия 1072 может включать в себя U-образный участок, включающий в себя дистальные выступающие стенки 1074 и проксимальные выступающие стенки 1076. Каждая дистальная выступающая стенка 1074 включает в себя дугообразный криволинейный паз 1078, выполненный с возможностью принимать соответствующий участок штифта криволинейного сечения 1048, прикрепленного к верхней бранше 1040. Таким образом, осевое или линейное перемещение челнока закрытия 1072 относительно нижней бранши 1020 вызывает вращение верхней бранши 1040 на оси поворота 1050 и вокруг оси крепления AA-AA посредством взаимодействия штифта криволинейного сечения 1048 в криволинейных пазах 1078.
В различных вариантах закрывающая система 1070 включает в себя поворотный ствол 1080 закрытия концевого эффектора с резьбой и дистальный концевой участок 1082, удерживаемый с возможностью поворота внутри корпуса 1010 концевого эффектора. Ствол 1080 закрытия концевого эффектора образует ось ствола закрытия CSA-CSA. См. ФИГ. 37. Гнездовой соединитель 57 присоединен к проксимальному концу ствола закрытия 1080, чтобы способствовать соединению ствола закрытия 1080 со штырьковым соединителем 51, прикрепленным к первому приводному валу в хирургическом инструменте. Закрывающая система 1070 дополнительно включает гайку закрытия 1084, устанавливаемую с помощью резьбы на ствол закрытия 1080. Гайка закрытия 1084 выполнена с возможностью установки в монтажных пазах 1077 в выступающих стенках 1076 челнока закрытия 1072. Таким образом, поворот ствола закрытия 1080 в первом направлении заставляет гайку закрытия 1084 выталкивать челнок закрытия 1072 в дистальном направлении DD. Перемещение челнока закрытия 1072 в дистальном направлении DD приводит к шарнирному перемещению верхней бранши 1040 из открытого положения в закрытое. Аналогично, перемещение челнока закрытия 1084 в проксимальном направлении PD приведет к перемещению верхней бранши 1040 из закрытого положения назад в открытое.
Концевой эффектор 1000 дополнительно включает в себя вторую приводную систему концевого эффектора, также называемую в настоящем документе пусковой системой 1100 для перемещения режущего ткань элемента 1090 и узла 1092 клиновидных салазок между начальным и конечным положениями. Когда узел 1092 клиновидных салазок выталкивается дистально через кассету 1060 с хирургическими скобками, узел 1092 клиновидных салазок функционально взаимодействует с выталкивателями в кассете 1060, на которой удерживаются хирургические скобки. По мере дистального выталкивания узел клиновидных салазок 1092 выталкиватели перемещаются вверх в соответствующих углублениях, чтобы вытолкнуть скобки, удерживаемые там, в формирующее взаимодействие с нижней стороной участка упора 1042 верхней бранши 1040. В одном варианте пусковая система 1100 дополнительно включает поворотный пусковой ствол 1102 с резьбой, удерживаемый с возможностью поворота на корпусе концевого эффектора 1010. Пусковой ствол 1102 образует ось пускового ствола FSA-FSA, параллельную или по существу параллельную оси ствола закрытия CSA-CSA. См., например, ФИГ. 37. Пусковой ствол 1102 включает дистальный концевой участок 1104, удерживаемый с возможностью поворота на монтажном блоке 1106, установленном в корпусе 1010 концевого эффектора. Гнездовой соединитель 57 присоединен к проксимальному концу пускового ствола 1102, чтобы способствовать соединению пускового ствола 1102 со штырьковым соединителем 51, прикрепленным ко второму приводному валу в хирургическом инструменте. Пусковая система 1100 дополнительно включает пусковую гайку 1110, устанавливаемую с помощью резьбы на пусковой ствол 1102. Таким образом, поворот пускового ствола 1102 приводит к осевому перемещению пусковой гайки 1110 в корпусе концевого эффектора 1010. В одном варианте режущий ткань элемент 1090 и узел клиновидных салазок 1092 соединен с пусковой гайкой 1110 пусковой штангой или пусковыми штангами 1112. Пусковая штанга или штанги могут также называться в настоящем документе «вторым исполнительным механизмом концевого эффектора», линейно или по оси перемещаемым в ответ на активацию системы пуска. Таким образом, поворот пускового ствола 1102 в первом направлении будет выталкивать пусковую гайку 1110, пусковую(ые) штангу(и) 1112, режущий ткань элемент 1090 и узел клиновидных салазок 1092 в дистальном направлении DD из, например, начального положения (ФИГ. 35) в конечное положение, в котором режущий ткань элемент 1090 и узел клиновидных салазок 1092 вытолкнуты к дистальному концу кассеты с хирургическими скобками 1060. Поворот пускового ствола 1102 в противоположном направлении будет выталкивать пусковую гайку 1110, пусковую(ые) штангу(и) 1112, режущий ткань элемент 1090 и узел клиновидных салазок 1092 в проксимальном направлении PD из их соответствующих конечных положений назад в их соответствующие начальные положения. В некоторых вариантах осуществления узел клиновидных салазок может оставаться на дистальном конце кассеты с хирургическими скобками и не возвращаться с режущим ткань элементом 1090 в начальное положение. В других вариантах осуществления режущий ткань элемент и элемент узла клиновидных салазок могут оставаться на дистальном конце элемента кассеты со скобками.
Концевой эффектор 1000 может также быть оснащен различными датчиками, соединенными с контактной пластиной 1120 концевого эффектора, установленной в корпусе 1010 концевого эффектора. Контактная пластина 1120 может быть расположена в корпусе 1020 концевого эффектора так, что когда концевой эффектор 1000 функционально соединен с хирургическим инструментом, контактная пластина 1120 концевого эффектора электрически соединена с контактной пластиной 30 хирургического инструмента, установленной в корпусе хирургического инструмента 12. См., например, ФИГ. 1. Как показано на ФИГ. 34, датчик закрытия 1122 может быть установлен в корпусе концевого эффектора 1010 и электрически соединен с контактной пластиной концевого эффектора 1120 так, что когда концевой эффектор 1000 функционально соединен с хирургическим инструментом, датчик закрытия 1122 обменивается данными с системой управления хирургического инструмента. Датчик закрытия 1122 может включать датчик Холла 7028, как показано ниже, например, в связи с ФИГ. 61, 63, выполненный с возможностью обнаружения положения выступа переключателя 1086 на гайке закрытия 1084. Кроме того, пусковой датчик 1124 может также устанавливаться в корпусе концевого эффектора 1010, чтобы обнаруживать наличие пусковой штанги 1112. Пусковой датчик 1112 может включать датчик Холла 7028, как показано ниже, например, в связи с ФИГ. 61, 63 и быть электрически соединенным с контактной пластиной концевого эффектора 1120 для конечной связи с системой управления хирургического инструмента, такой как процессор рукоятки 7024, более подробно описанный ниже в связи с ФИГ. 61, 63, 64.
Ниже описано применение концевого эффектора 1000 в соединении с хирургическим инструментом 10. Однако следует понимать, что концевой эффектор 1000 может быть функционально соединен с различными другими описанными в настоящем документе конструкциями хирургических инструментов. Перед использованием ствол закрытия 1080 и пусковой ствол 1102 «зафиксированы» или расположены в их соответствующих начальных положениях, чтобы способствовать прикреплению к первому и второму приводным валам 22, 42, соответственно. Например, чтобы соединить концевой эффектор 1000 с хирургическим инструментом 10, врач перемещает концевой эффектор 1000 в положение, в котором ось ствола закрытия CA-CA выровнена по оси с осью первого приводного вала FDA-FDA, а ось пускового ствола FSA-FSA выровнена по оси с осью второго приводного вала SDA-SDA. Гнездовой соединитель 57 на стволе закрытия 1080 вступает в функциональное взаимодействие со штырьковым соединителем 51 на первом приводном валу 22. Аналогично, гнездовой соединитель 57 на пусковом стволе 1102 вступает в функциональное взаимодействие со штырьковым соединителем 51 на втором приводном валу 42. Таким образом, находясь в этом положении, ствол закрытия 1080 функционально соединен с первым приводным валом 22, а пусковой ствол 1102 функционально соединен со вторым приводным валом 42. Контактная пластина 1120 концевого эффектора функционально соединена с контактной пластиной 30 хирургического инструмента так, что датчики 1122, 1124 (и любые другие датчики в пределах концевого эффектора 1000) находятся в функциональной связи с системой управления хирургического инструмента. Чтобы удержать концевой эффектор 1000 в соединенном функциональном взаимодействии с хирургическим инструментом 10, концевой эффектор 1000 включает в себя защелку 1130 ограничителя, прикрепленную к корпусу концевого эффектора 1010 и выполненную с возможностью разъемного взаимодействия с участком корпуса 12 инструмента. Защелка 1130 ограничителя может включать в себя удерживающий выступ 1132, который может разъемно взаимодействовать с полостью 15 ограничителя, образованной в корпусе 12. См. рис. 1.
При соединении вместе датчик закрытия 1122 обнаруживает положение гайки закрытия 1084, а пусковой датчик 1124 обнаруживает положение пусковой штанги 1112. Эта информация направляется системе управления хирургического инструмента. Кроме того, врач может подтвердить, что сдвигаемый узел трансмиссии (или ее передаточная каретка 62) находится в первом приводном положении. Это может быть подтверждено активацией светового индикатора 77 на корпусе 12, как описано выше. Если сдвигаемый узел трансмиссии 60 не находится в своем первом приводном положении, врач может активировать пусковой крючок 92, чтобы переместить каретку передачи 62 в первое приводное положение так, что активация пускового переключателя-качели 110 для активации двигателя 80 приведет к активации первой приводной системы 20. Если закрывающая система 1070 и пусковая система 1100 находятся в своих соответствующих начальных положениях, а в концевом эффекторе 1000 правильно установлена неизрасходованная кассета со скобками 1060, врач может расположить бранши 1020, 1040 относительно целевой ткани, которую необходимо разрезать и сшить скобками. Врач может закрыть верхнюю браншу 1040, активируя пусковой переключатель-качели 110, чтобы включить двигатель 80 и повернуть первый приводной вал 22. После того как целевая ткань будет зажата между верхней браншей 1040 и кассетой 1060 с хирургическими скобками в нижней бранше 1020, врач сможет активировать пусковой крючок 92, чтобы сдвинуть каретку передачи 62 в ее второе приводное положение так, что активация двигателя 80 приведет к повороту второго приводного вала 42. Когда каретка передачи 62 передвинута во второе приводное положение, врач может еще раз активировать пусковой переключатель-качели 110, чтобы активировать вторую приводную систему 40 и чтобы пусковая система 1100 в концевом эффекторе 1000 вытолкнула режущий ткань элемент 1090 и узел клиновидных салазок 1092 дистально через кассету 1060 с хирургическими скобками. Поскольку режущий ткань элемент 1090 и узел клиновидных салазок 1092 выталкиваются дистально, целевая ткань, зажатая между браншами 1020, 1040, разрезается и сшивается скобками. После того как режущий ткань элемент 1090 и узел клиновидных салазок 1092 вытолкнуты в их крайние дистальные положения в кассете 1060 с хирургическими скобками, врач может активировать пусковой переключатель-качели 110, чтобы изменить направление вращения двигателя на противоположное и вернуть пусковую систему 1100 в ее начальное положение.
При использовании концевого эффектора 1000 и другого концевого эффектора и хирургических инструментов, описанных в настоящем документе и имеющих аналогичные конструкции браншей, могут возникнуть сложности с надлежащей очисткой углублений упора на его нижней стороне. Кроме того, углубления упора могут истираться, стачиваться или просто изнашиваться со временем, становясь малопригодными для дальнейшего использования. Кроме того, в зависимости от применения, загрузка и удаление кассеты с хирургическими скобками может быть связана с затруднениями. На ФИГ. 119–121 изображен «комплект скоб» одноразового применения 1300, который может решить некоторые или даже все из указанных проблем.
На ФИГ. 119 показан участок концевого эффектора 1000’, который может быть аналогичным по конструкции и использованию, например, концевому эффектору 1000, а также другим раскрытым здесь концевым эффекторам, за исключением описанных ниже конкретных различий. Как представлено на ФИГ. 119, верхняя бранша 1240 включает в себя открытый дистальный конец 1243. Верхняя бранша 1240 может быть выполнена из металлического материала и иметь U-образную форму, если смотреть с дистального конца, и включать два выступающих внутрь и расположенных друг напротив друга удерживающих выступа 1245. Концевой эффектор 1000’ дополнительно включает раму нижней бранши 1222, аналогичную, например, описанной в настоящем документе раме нижней бранши 1222. Как представлено на чертеже, рама 1222 нижней бранши также имеет открытый дистальный конец 1223.
Также согласно ФИГ. 119 один вариант комплекта 1300 скоб для одноразового применения включает в себя упор 1302, имеющий поверхность для формирования скобок 1304, включающий множество образованных в ней углублений для формирования скоб (не изображены). Комплект 1300 скоб дополнительно включает кассету 1310, со скобками имеющую платформу кассеты 1312, расположенную напротив нижней поверхности для формирования скобок 1304 упора 1302. Кассета 1310 со скобками может быть аналогична другим кассетам со скобками, более подробно описанным в настоящем документе, и может функционально удерживать в себе множество хирургических скоб. Комплект 1300 скоб дополнительно включает в себя одноразовый элемент для хранения 1320, имеющий размеры и форму, подходящие для фрикционного взаимодействия с упором 1302 и кассетой 1310 со скобками таким образом, чтобы удерживать выравнивание между углублениями для скоб в нижней поверхности для формировании скобок 1304 и скоб (не показаны) в кассете 1310 со скобками перед их применением. Удерживающий элемент 1320 может также включать в себя разделитель 1322, проходящий между упором 1302 и кассетой 1310 со скобками. Удерживающий элемент может, например, быть сформован из пластмассы или другого подходящего полимерного материала, а разделительная подкладка 1322 может быть изготовлен из металла. Разделительная подкладка 1322 может удерживаться за счет трения в пазе или другом удерживающем элементе, образованном в удерживающем элементе 1320.
Как показано на ФИГ. 120, комплект 1300 скоб устанавливается путем выравнивания упора 1302 с открытым дистальным концом 1243 в верхней бранше 1240, при этом кассета 1310 со скобками выравнивается с открытым дистальным концом 1245 на раме нижней бранши 1222. После этого комплект скобок 1300 перемещают в проксимальном направлении PD в положение, показанное на ФИГ. 120. Удерживающие выступы 1245 служат для удерживания упора 1302 в верхней бранше 1240. Концевой эффектор 1000’ может также включать в себя активируемый вручную элемент 1340 защелки, который может перемещаться из нефиксированного положения (ФИГ. 119) в зафиксированное положение (ФИГ. 121). Например, в зафиксированном положении элемент 1340 защелки удерживает упор 1302 в верхней бранше 1240, а кассету 1310 со скобками - в раме нижней бранши 1222. Например, элемент 1340 защелки может включать в себя выполненный с возможностью перемещения верхний плечо 1342 защелки, выполненный с возможностью разъемного взаимодействия с участком (например, выступом, стопором, буртом или другим удерживающим элементом или элементами), образованными на проксимальном конце упора 1302. Аналогично, элемент 1340 защелки может включать в себя выполненный с возможностью перемещения нижний плечо 1344 защелки, выполненный с возможностью разъемного взаимодействия с участком (например, выступом, стопором, буртом или другим удерживающим элементом или элементами), образованными на кассете 1310 со скобками. Верхнее и нижнее плечи 1342, 1344 защелки могут шарнирно или иным образом удерживаться с возможностью перемещения на концевом эффекторе 1000’ для избирательного перемещения между зафиксированным и незафиксированным положениями. В различных вариантах верхнее и нижнее плечи 1342, 1344 защелки могут, как правило, смещаться в зафиксированное положение пружиной или пружинами (не показаны). В таких конструкциях врач может вставить комплект скобок 1300 в верхнюю браншу 1240 и раму нижней бранши 1222. При контакте проксимального конца упора 1302 с верхним плечом 1342 защелки, верхний плечо 1342 защелки вращается или перемещается, чтобы позволить установить упор 1302 на место. Как только упор установлен на место, верхний плечо 1342 защелки смещается в фиксирующее взаимодействие с упором 1302 (в случае применения пружины или смещающего элемента). В альтернативных конструкциях верхнее плечо 1342 защелки может перемещаться в зафиксированное положение вручную. Аналогично, при контакте проксимального конца кассеты 1310 со скобками с нижним плечом 1344 защелки, нижнее плечо 1344 защелки вращается или перемещается, чтобы позволить кассете 1310 со скобками встать на место. Как только кассета 1310 со скобками встанет на место, нижнее плечо 1344 защелки смещается в фиксирующее взаимодействие с кассетой 1310 со скобками, чтобы удерживать ее на месте (в случае применения пружины или смещающей конструкции). В альтернативных вариантах осуществления нижний плечо 1344 защелки может перемещаться в зафиксированное положение вручную. После установки комплекта скобок 1300 и фиксации или иного прикрепления упора 1302 и кассеты 1310 со скобками к концевому эффектору 1000’ врач может удалить узел 1320 элемента для хранения. См., например, ФИГ. 121. После использования комплекта скобок 1300 врач может установить удерживающий элемент 1320 на место, в дистальные концы упора 1302 и кассеты 1310 со скобками. Это может быть выполнено путем выравнивания открытого конца удерживающего элемента 1320 и последующего введения с усилием удерживающего элемента 1320 обратно в фрикционное взаимодействие с упором 1302 и кассетой 1310 со скобками. После установки дистальных концов упора 1302 и кассеты 1310 со скобками в удерживающий элемент 1320 врач может переместить верхний и нижний плечи 1342, 1344 защелки в их незафиксированные положения, чтобы получить возможность извлечь комплект 1300 скоб из верхней бранши 1240 и рамы 1222 нижней бранши. После этого комплект 1300 скоб можно утилизировать единым блоком. В других ситуациях врач может отдельно удалить упор 1302 и кассету 1310 со скобками из концевого эффектора 1000’ без первоначальной установки удерживающего элемента 1320.
На ФИГ. 38–41 представлен хирургический концевой эффектор 2000, содержащий хирургический режущий и сшивающий инструмент. Он относится к типу инструментов, обычно называемому «изогнутый режуще-сживающий инструмент». Различные варианты таких сшивающих устройств описаны, например, в Патенте США № 6,988,650, озаглавленном МЕХАНИЗМ ПРОДВИЖЕНИЯ РЫЧАГА УДЕРЖИВАЮЩЕГО ШТИФТА ДЛЯ ИЗОГНУТОГО РЕЖУЩЕ-СШИВАЮЩЕГО ИНСТРУМЕНТА, и Патенте США № 7,134,587, озаглавленном ПЛЕЧО ОТТЯГИВАНИЯ СКАЛЬПЕЛЯ ДЛЯ ИЗОГНУТОГО РЕЖУЩЕ-СШИВАЮЩЕГО ИНСТРУМЕНТА, которые включены в данное описание в полном объеме посредством ссылки. Концевой эффектор 2000 содержит корпус концевого эффектора 2010, который может быть изготовлен из сегментов 2012, 2014 корпуса, соединенных между собой с возможностью извлечения с помощью винтов, утолщений, защелкивающихся элементов и т.д. Из корпуса концевого эффектора 2010 выступает удлиненный узел 2020 рамы, прерывающийся на головке 2002 инструмента концевого эффектора. В одном варианте узел 2020 рамы содержит пару разделенных в пространстве распорок или пластин 2022 рамы, которые устойчиво прикреплены к корпусу 2010 и выступают из него дистально. С-образная опорная конструкция 2024 прикреплена к дистальному концу пластин 2022 рамы. Термин «С-образный» используется во всем описании для указания на вогнутую форму опорной конструкции 2024 и модуля кассеты с хирургическими скобками 2060. С-образная конструкция способствует улучшенной функциональности, и термин «С-образный» в данном описании следует понимать как включающий в себя множество вогнутых форм, которые аналогичным образом улучшают функциональность хирургических сшивающих и режущих инструментов. Опорная конструкция 2024 прикреплена к пластинам 2022 рамы заклепкой 2023 буртика и стволами 2026, которые проходят от опорной конструкции 2024 в соответствующие отверстия для их приема в пластинах 2022 рамы. В различных вариантах опорная конструкция 2024 может быть образована в виде одной детали. Конкретнее, опорная конструкция 2024 может быть образована из экструдированного алюминиевого материала. При формировании опорной конструкции 2024 таким образом не требуется применения множества частей, и связанная с этим стоимость изготовления и сборки значительно снижается. Кроме того, считается, что унитарная конструкция опорной конструкции 2024 повышает общую стабильность концевого эффектора 2000. Кроме того, унитарная экструдированная конструкция опорной конструкции 2024 обеспечивает уменьшение массы, облегчение стерилизации, поскольку облучение кобальтовым источником обеспечивает эффективное проникновение через экструдированный алюминий, а также уменьшение травмирования тканей благодаря более гладкой наружной поверхности, достигаемой путем экструзии.
Концевой эффектор 2000 дополнительно включает первую приводную систему концевого эффектора, также называемую закрывающей системой концевого эффектора 2070, и вторую приводную систему концевого эффектора, также упоминаемую в настоящем документе как пусковая система 2100. В одном варианте, например, закрывающая система 2070 концевого эффектора включает в себя узел 2072 закрывающего ригеля, имеющий размеры, необходимые для скользящей установки между распорками 2022 рамы для осевого перемещения между ними. Узел 2072 закрывающего ригеля может также упоминаться как первый исполнительный механизм концевого эффектора. У него открытая нижняя часть, выполненная с возможностью скользящей установки в нее узла 2112 пусковой штанги пусковой системы 2100, как будет более подробно описано ниже. В одном варианте, например, узел 2072 закрывающего ригеля является сформованным пластмассовым элементом, имеющим форму, подходящую для перемещений и функций, которые будут дополнительно описаны ниже. Изготовление узла 2072 закрывающего ригеля из пластмассы позволяет сократить производственные издержки, а также уменьшить массу концевого эффектора 2000. Кроме того, возможно упрощение стерилизации концевого эффектора 2000 облучением из кобальтового источника, поскольку излучение легче проникает через пластмассу, чем через нержавеющую сталь. В альтернативном варианте конструкции узел 2072 закрывающего ригеля может быть выполнен из экструдированного алюминия с последующей машинной обработкой для изготовления требуемых в окончательной конструкции элементов. Хотя конструкция узла закрывающего ригеля из экструдированного алюминия может быть не настолько простой в производстве, как пластмассовый компонент, она все же обеспечит такие же преимущества (т.е. устранение компонентов, облегчение сборки, меньшая масса, легче стерилизовать).
Узел 2072 закрывающего ригеля включает изогнутый дистальный конец 2074, имеющий размеры, позволяющие его принимать между боковыми стенками 2027 опорной конструкции 2024. Изогнутый дистальный конец 2074 имеет размеры и форму, позволяющие его принимать и удерживать в корпусе 2062 кассеты модуля 2060 кассеты. В различных вариантах проксимальный конец узла 2072 закрывающего ригеля соединен с гайкой закрытия 2084, устанавливаемой посредством резьбы на ствол закрытия 2080. Ствол закрытия 2080 образует ось ствола закрытия CSA-CSA и имеет гнездовой соединитель 57, присоединенный к его проксимальному концу, чтобы способствовать соединению ствола закрытия 2080 со штырьковым соединителем 51, прикрепленным к первому приводному валу хирургического инструмента. Поворот ствола закрытия 2080 в первом направлении приводит к тому, что гайка закрытия 2084 выталкивает узел 2072 закрывающего ригеля в дистальном направлении DD. Поворот ствола закрытия 2080 в противоположном направлении аналогично приводит к проксимальному перемещению гайки закрытия 2084 и узла 2072 закрывающего ригеля.
Как указано выше, дистальный конец 2074 узла 2072 закрывающего ригеля выполнен с возможностью функционального удерживания в нем корпуса 2062 кассеты модуля 2060 кассеты. Модуль 2060 кассеты включает множество хирургических скоб (не показаны) на выталкивателе скоб (не показан), который при выдвижении по оси выталкивает хирургические скобки из их соответствующих углублений 2066, расположенных с каждой стороны паза 1068, который выполнен с возможностью обеспечения прохождения через него элемента 2115 скальпеля. Модуль 2060 кассеты может, например, быть в чем-то аналогичным модулям кассеты, описанным, например, в патентах США №№ 6,988,650 и 7,134,587, которые полностью включены посредством ссылки в данное описание, за исключением указанных отличий. Концевой эффектор 2000 можно утилизовать после однократного применения, или концевой эффектор 2000 может использоваться многократно путем замены использованного модуля кассеты в ходе выполняемой операции или в рамках подготовки к новой операции после повторной стерилизации.
Концевой эффектор 2000 дополнительно включает пусковую систему 2100, включающую узел 2112 пусковой штанги, который выполнен с возможностью скользящей установки в открытую нижнюю часть узла 2072 закрывающего ригеля. См. ФИГ. 39. В одном варианте пусковая система 2100 дополнительно включает пусковой ствол 2102, который на дистальном конце 2104 имеет нарезанную резьбу, а проксимальный участок 2106 имеет квадратное поперечное сечение. Дистальный конец 2104 с резьбой принимается с возможностью ввинчивания в пусковой гайке 2110 с резьбой, прикрепленной к проксимальному концу узла 2112 пусковой штанга. Пусковая гайка 2110 с резьбой имеет размеры, позволяющей ее принимать с возможностью скольжения в осевой полости 2085 узла 2084 гайки закрытия. См. ФИГ. 41. Такая конструкция позволяет пусковой гайке 2110 выдвигаться по оси с узлом 2084 гайки закрытия, когда концевой эффектор 2000 перемещен в закрытое положение, а затем перемещаться по оси относительно гайки закрытия 2084 и узла 2072 закрывающего ригеля при активации пусковой системы 2100. Пусковой ствол 2102 образует ось пускового ствола FSA-FSA, параллельную или по существу параллельную оси ствола закрытия CSA-CSA. См., например, ФИГ. 41. На ФИГ. 39 и 41 также видно, что проксимальный участок 2106 пускового ствола 2102 принимается с возможностью скольжения в удлиненном канале 2105 в гнездовом соединителе 57’, который во всем остальном идентичен описанному здесь гнездовому соединителю. Удлиненный канал 2105 имеет квадратное поперечное сечение, размер которого позволяет скользяще устанавливать в него проксимальную часть 2106 пускового ствола 2102. Такая конструкция позволяет пусковому стержню 2102 перемещаться по оси относительно охватывающего торцевого соединителя 57’ с возможным вращением вместе с охватывающим торцевым соединителем 57’. Таким образом, когда узел 2072 закрывающего ригеля выдвигается в дистальном направлении «DD» после активации первой приводной системы в хирургическом инструменте, пусковая гайка 2110 будет двигаться в дистальном направлении «DD» в узле гайки закрытия 2084. Проксимальная часть 2106 пускового ствола 2102 будет двигаться по оси в канале 2105 в гнездовом соединителе 57’, в то же время оставаясь во взаимодействии с ним. После этого активация второй приводной системы в одном направлении поворота в хирургическом инструменте, функционально соединенном с охватывающим торцевым соединителем 57’, будет приводить к вращению пускового ствола 2102, приводя к движению узла 2112 пусковой штанги в дистальном направлении DD. По мере перемещения узла 2112 пусковой штанги в дистальном направлении держатель скальпеля 2115 выдвигается дистально через модуль 2060 кассеты. Активация второй приводной системы во втором направлении поворота приводит к перемещению узла 2112 пусковой штанги в проксимальном направлении «PD».
Дистальный конец узла 2112 пусковой штанги включает приводной элемент 2114 и элемент 2115 скальпеля, дистально выступающий из него. Как видно на ФИГ. 39, элемент 2115 скальпеля принимается с возможностью скольжения в участке 2142 упора узла 2140 упора, выполненном с возможностью установки в изогнутый участок 2025 упора опорной конструкции 2024. Более подробная информация относительно узла 2140 упора приведена в патентах США №№ 6,988,650 и 7,134,587. Концевой эффектор 2000 может также включать в себя предохранительный механизм 2150 блокировки (ФИГ. 39) для предотвращения пуска ранее запущенного модуля 2060 кассеты. Более подробное описание взаимодействия между модулем 2060 кассеты и предохранительным механизмом блокировки приведено в патентах США №№ 6,988,650 и 7,134,587.
Концевой эффектор 2000 также включает в себя приводной механизм 2160 штифта тканевого фиксатора. Приводной механизм 2160 штифта тканевого фиксатора включает в себя седловидный ползунок 2162, расположенный в верхнем участке 2010 корпуса. Ползунок 2162 шарнирно подсоединен к приводу 2163 штока толкателя удерживаемым с возможностью скольжения внутри корпуса 2010. Привод 2163 штока толкателя ограничен в продольном перемещении вдоль длинной оси концевого эффектора 2000. Привод 2163 штока толкателя подсоединен к штоку 2164 толкателя кольцевым желобом 2165 на штоке 2164 толкателя, который защелкивается в паз 2166 привода 2163 штока толкателя. См. ФИГ. 41. Дистальный конец штока 2164 толкателя содержит кольцевой желоб 2167, который взаимосвязан с канавкой 2172 в проксимальном конце муфты 2170, которая прикреплена к модулю 2160 кассеты (лучше всего показан на ФИГ. 41). Дистальный конец муфты 2170 содержит желоб 2174 для взаимосвязи с кольцевым пазом 2182 на удерживающем штифте 2180. Ручное перемещение ползунка 2162 приводит к перемещению штока 2164 толкателя. Дистальное перемещение или проксимальное втягивание штока 2164 толкателя приводит к соответствующему перемещению удерживающего штифта 2180. Механизм активации 2160 удерживающего штифта 2180 также функционально взаимодействует с узлом 2072 закрывающего ригеля так, что активация закрывающей системы 2070 приводит к автоматическому дистальному перемещению удерживающего штифта 2180, если он уже не был перемещен вручную в крайнее проксимальное положение. При продвижении удерживающего штифта 2180 он проходит через корпус 2062 кассеты в узел 2140 упора, чтобы, таким образом, захватить ткань между модулем 2060 кассеты и узлом 2140 упора.
В одном варианте приводной механизм 2160 удерживающего штифта включает в себя направляющую вилку 2190, с возможностью поворота или шарнирно удерживаемую в корпусе 2010 посредством шарнирного штифта 2192. Узел 2072 закрывающего ригеля дополнительно включает в себя стержни или выступы 2073, проходящие латерально с обеих сторон узла 2072 закрывающего ригеля в корпусе 2010. Эти стержни 2073 принимаются с возможностью скольжения в соответствующие дугообразные пазы 2194 в вилке 2190. Вилка 2190 содержит штифты 2196 криволинейного сечения, расположенные так, чтобы толкать криволинейные поверхности 2168 привода 2163 штока толкателя. Вилка 2190 не прикреплена непосредственно к удерживающему штифту 2180, так что хирург может решить выдвинуть удерживающий штифт 2180 вручную. Удерживающий штифт 2180 выдвинется автоматически, если хирург решит не использовать удерживающий штифт 2180, когда узел 2072 закрывающего ригеля выдвигается дистально в закрытое положение. Хирург должен втянуть удерживающий штифт 2180 вручную. При такой конструкции приводного механизма 2160 удерживающего штифта возможно закрытие и втягивание удерживающего штифта 2180 вручную. Если хирург не закрывает удерживающий штифт 21280 вручную, имеющийся приводной механизм 2160 удерживающего штифта сделает это автоматически во время зажатия инструмента. Более подробная информация относительно активации и применения удерживающего штифта приведена в патентах США №№ 6,988,650 и 7,134,587.
Концевой эффектор 2000 может также быть оснащен различными датчиками, соединенными с контактной пластиной 2120 концевого эффектора, установленной в корпусе 2010 концевого эффектора. Например, концевой эффектор 2000 может включать в себя датчик закрытия 2122, установленный в корпусе 2010 концевого эффектора и электрически соединенный с контактной пластиной 2120 концевого эффектора так, что когда концевой эффектор 2000 функционально соединен с хирургическим инструментом, датчик закрытия 2122 обменивается данными с системой управления хирургического инструмента. Датчик закрытия 2122 может включать датчик Холла 7028, как показано ниже в связи с ФИГ. 61, 63, выполненный с возможностью обнаружения положения выступа переключателя 2086 на гайке закрытия 21084. См. ФИГ. 40. Кроме того, пусковой датчик 2124 может также быть установлен в корпусе 2010 концевого эффектора и выполнен с возможностью обнаружения местонахождения пусковой гайки 2110 в гайке закрытия 2084. Пусковой датчик 2124 может включать датчик Холла 7028, как описано ниже в связи с ФИГ. 61, 63 и быть электрически соединенным с контактной пластиной 2120 концевого эффектора для конечной связи с системой управления хирургического инструмента, как описано выше. Контактная пластина 2120 может быть расположена в корпусе 2020 концевого эффектора так, что когда концевой эффектор 2000 функционально соединен с хирургическим инструментом, контактная пластина 2120 концевого эффектора электрически соединена с контактной пластиной 30 хирургического инструмента, установленной в корпусе 12 хирургического инструмента, как описано выше.
Ниже описано применение концевого эффектора 2000 в связи с хирургическим инструментом 10. Однако следует понимать, что концевой эффектор 2000 может быть функционально соединен с различными другими описанными в настоящем документе конструкциями хирургических инструментов. Перед использованием ствол закрытия 2080 и пусковой ствол 2102 «зафиксированы» или расположены в их начальных положениях, чтобы способствовать прикреплению к первому и второму приводным валам 22, 42 соответственно. Например, чтобы соединить концевой эффектор 2000 с хирургическим инструментом 10, врач перемещает концевой эффектор 2000 в положение, в котором ось ствола закрытия CSA-CSA выровнена по оси с осью первого приводного вала FDA-FDA, а ось пускового ствола FSA-FSA выровнена по оси с осью второго приводного вала SDA-SDA. Гнездовой соединитель 57 на стволе закрытия 2080 вступает в функциональное взаимодействие со штырьковым соединителем 51 на первом приводном валу 22. Аналогично, гнездовой соединитель 57’ на пусковом стволе 2102 вступает в функциональное взаимодействие со штырьковым соединителем 51 на втором приводном валу 42. Таким образом, находясь в этом положении, ствол закрытия 2080 функционально соединен с первым приводным валом 22, а пусковой ствол 2102 функционально соединен со вторым приводным валом 42. Контактная пластина 1120 концевого эффектора функционально соединена с контактной пластиной 30 хирургического инструмента так, что датчики в пределах концевого эффектора 2000 находятся в функциональной связи с системой управления хирургического инструмента. Чтобы удержать концевой эффектор 2000 в соединенном функциональном взаимодействии с хирургическим инструментом 10, концевой эффектор 2000 включает фиксатор 2130 ограничителя, прикрепленный к корпусу концевого эффектора 2010 и выполненный с возможностью разъемного взаимодействия с участком корпуса инструмента 12. Защелка 2130 ограничителя может включать в себя удерживающий выступ 2132, который может разъемно взаимодействовать с полостью 15 ограничителя, образованной в корпусе 12. См. рис. 1. При соединении вместе датчик закрытия 2122 обнаруживает положение гайки закрытия 2084, а пусковой датчик 2124 обнаруживает положение пусковой гайки 2110. Эта информация направляется системе управления хирургического инструмента. Кроме того, врач может подтвердить, что сдвигаемый узел трансмиссии (или ее передаточная каретка 62) находится в первом приводном положении. Это может быть подтверждено активацией светового индикатора 77 на корпусе 12, как описано выше. Если сдвигаемый узел трансмиссии 60 не находится в своем первом приводном положении, врач может активировать пусковой крючок 92, чтобы переместить каретку передачи 62 в первое приводное положение так, что активация пускового переключателя-качели 110 для активации двигателя 80 приведет к активации первой приводной системы 20. Если закрывающая система 2070 и пусковая система 2100 находятся в своих соответствующих начальных положениях, а в концевом эффекторе 2000 правильно установлен неизрасходованный модуль 2060 кассеты со скобками, врач может активировать закрывающую систему 2070, чтобы захватить целевую ткань между модулем 2060 кассеты и узлом 2140 упора.
Врач может переместить в дистальном направлении узел 2072 закрывающего ригеля, воздействуя на пусковой переключатель-качели 110, чтобы включить двигатель 80 и повернуть первый приводной вал 22. Эта активация приводит к перемещению модуля 2060 кассеты к узлу упора 2140 для зажатия находящейся между ними целевой ткани. По мере перемещения 2072 закрывающего ригеля дистально взаимодействие стержней 2073 и вилки 2190 будет вызывать активацию приводного механизма 2160 штифта тканевого фиксатора, выталкивающий удерживающий штифт 2180 дистально через участок 2161 платформы и через узел 2140 упора в находящееся там углубление 2141 штифта (см. ФИГ. 41). Удерживающий штифт 2180 служит для захвата целевой ткани между узлом 2140 упора и модулем 2060 кассеты. После того, как целевая ткань будет зажата между узлом 2140 упора и модулем 2060 кассеты, врач сможет активировать пусковой крючок 92, чтобы сдвинуть каретку передачи 62 в ее второе приводное положение, так что активация двигателя 80 приведет к повороту второго приводного вала 42. Когда каретка передачи 62 перемещается во второе приводное положение, врач может еще раз активировать пусковой переключатель-качели 110, чтобы активировать вторую приводную систему 40 и пусковая система 2100 в концевом эффекторе 2000 вытолкнет дистально узел 2112 пусковой штанги, который также выталкивает элемент 2115 скальпеля дистально через модуль 2060 кассеты, разрезая целевую ткань, зажатую между узлом 2140 упора и модулем 2060 кассеты. По мере перемещения узла 2112 пусковой штанги дистально приводной элемент 2114 также выталкивает хирургические скобки, удерживаемые в модуле 2060 кассеты, из модуля 2060 кассеты через целевую ткань и в формирующий контакт с узлом 2140 упора. После завершения действия разрезания и сшивания врач может активировать пусковой переключатель-качели 110, чтобы изменить направление вращения двигателя на противоположное и вернуть пусковую систему 2100 в ее начальное положение. Затем с помощью пускового крючка 92 врач может вернуть каретку передачи 62 в ее первое приводное положение, так что активация пускового переключателя-качели 110 в противоположном направлении приведет к тому, что двигатель 80 будет поворачиваться в обратном направлении, возвращая узел 2073 закрывающего ригеля в его начальное положение. По мере перемещения узла 2073 закрывающего ригеля в проксимальном направлении вилка 2190 может взаимодействовать с приводным механизмом 2160 штифта тканевого фиксатора для отведения удерживающего штифта 2180 в его начальное положение. В альтернативном варианте врач может вручную оттянуть удерживающий штифт 2180 в его начальное положение, используя седловидный ползунок 2162. Врач может оттянуть удерживающий штифт 2180 в его начальное положение до активации закрывающей системы 2070, чтобы вернуть закрывающий ригель 2072 в его начальное положение. Более подробная информация относительно использования изогнутого режуще-сживающего инструмента приведена в патентах США №№ 6,988,650 и 7,134,587.
На ФИГ. 42–45 изображен хирургический концевой эффектор 3000, содержащий хирургический режущий и сшивающий инструмент. Он относится к типу инструментов, обычно называемому «круговой хирургический сшивающий инструмент». При некоторых видах хирургических вмешательств использование хирургических сшивающих инструментов является предпочтительным способом соединения тканей. Таким образом, были разработаны специальным образом конфигурированные хирургические сшивающие инструменты для данных сфер применения. Например, существуют внутрипросветные или круговые сшивающие инструменты для выполнения хирургических операций на нижних отделах толстой кишки, где участки нижних отделов толстой кишки соединяют вместе после иссечения пораженного сегмента. Круговые сшивающие инструменты, используемые для выполнения таких операций, раскрыты, например, в патентах США №№ 5,104,025; 5,205,459; 5,285,945; 5,309,927; 8,353,439; и 8,360,297, содержание каждого из которых в полном объеме включено в настоящий документ путем ссылки.
Как видно на ФИГ. 42, концевой эффектор 3000 содержит корпус 3010 концевого эффектора, который может быть изготовлен из сегментов корпуса 3012, 3014, соединенных между собой с возможностью извлечения с помощью винтов, утолщений, защелкивающихся элементов и т.д. Из корпуса 3010 концевого эффектора выступает узел 3020 удлиненного ствола. Узел 3020 удлиненного ствола выполнен с возможностью функциональной поддержки и взаимодействия с круговой головкой 3300 инструмента и упором 3320. В приведенных выше в качестве примеров патентах США указано, что в данной области известно множество различных конструкций круговой кассеты со скобками и упора. Например, как показано на ФИГ. 43, головка 3300 кругового сшивающего инструмента может включать в себя элемент 3302 корпуса, который удерживает узел опоры кассеты в виде кругового узла 3304 выталкивателя скоб, выполненного с возможностью стыковки с круговой кассетой 3306 со скобками и выталкивания находящихся там скоб в формирующий контакт с нижней поверхностью 3326 формирования скоб упора 3320. Круговой элемент 3308 скальпеля также размещается в центре узла 3304 выталкивателя скоб. Проксимальный конец элемента корпуса 3302 может быть соединен с внешним трубчатым кожухом 3022 дугообразного узла стержня 3020 при помощи дистального элемента соединительной муфты 3024. Упор 3320 включает в себя круговой корпусный участок 3322, имеющий ствол упора 3324 для прикрепления к нему троакара. Корпус 3322 упора имеет нижнюю поверхность формирования скоб 3326 и может также иметь колпак 3328, прикрепленный к его дистальному концу. Ствол 3324 упора может быть также оснащен парой удерживающих зажимов троакара или листовыми пружинами 3330, которые служат для разъемного удержания троакара 3042 в удерживающем взаимодействии со стволом упора 3324, как будет более подробно рассмотрено ниже.
В одном варианте узел 3020 ствола включает в себя компрессионный ствол 3030, дистальный участок 3032 компрессионного ствола и узел 3040 стяжного хомута, которые функционально удерживаются во внешнем трубчатом колпаке 3022. Кончик 3042 троакара прикреплен к дистальному концу узла 3040 стяжного хомута крепежными элементами 3041. Как известно, кончик 3042 троакара может быть вставлен в ствол 3324 упора 3320 и удерживаться во взаимодействии с удерживающими зажимами троакара 3330.
Хирургический концевой эффектор 3000 дополнительно включает в себя закрывающую систему 3070 и пусковую систему 3100. По меньшей мере в одном варианте закрывающая система 3070 включает в себя узел гайки закрытия 3084, прикрепленный к проксимальному концу стяжного хомута 3040. Как видно на ФИГ. 42 и 43, узел гайки закрытия 3084 включает в себя проксимальный соединитель 3085, прикрепленный к проксимальному концу стяжного хомута 3040 крепежным элементом 3087. закрывающая система 3070 дополнительно включает в себя ствол закрытия с резьбой 3080, находящийся в резьбовом соединении с гайкой закрытия 3084. Ствол закрытия 3080 образует ось ствола закрытия CSA-CSA и имеет гнездовой соединитель 57, присоединенный к его проксимальному концу, чтобы способствовать соединению ствола закрытия 3080 со штырьковым соединителем 51, прикрепленным к первому приводному валу хирургического инструмента. Поворот ствола закрытия 3080 в первом направлении приводит к тому, что гайка закрытия 3084 выталкивает узел 3040 стяжного хомута в дистальном направлении DD. Поворот ствола закрытия 3080 в противоположном направлении аналогично приводит к проксимальному перемещению гайки закрытия 3084 и узла 3040 стяжного хомута.
Как видно на ФИГ. 43, дистальный участок 3032 компрессионного ствола соединен с узлом 3304 выталкивателя скоб. Таким образом, осевое перемещение ствола 3030 сжатия внутри внешнего трубчатого чехла 3022 воздействует на узел 3304 выталкивателя скоб для осевого перемещения внутри элемента 3302 корпуса. Осевым перемещением компрессионного ствола 3030 управляет пусковая система 3100. В одном варианте пусковая система 3100 включает пусковой ствол с резьбой 3102, находящийся в резьбовом соединении со снабженной резьбой пусковой гайкой 3110, прикрепленной к проксимальному концу компрессионного ствола 3030. Пусковой ствол 3102 образует ось пускового ствола FSA-FSA, параллельную или по существу параллельную оси ствола закрытия CSA-CSA. См., например, ФИГ. 44 и 45. Проксимальный конец пускового ствола 3102 имеет присоединенный к нему гнездовой соединитель 57, чтобы способствовать соединению пускового ствола 3102 со штырьковым соединителем 51, прикрепленным ко второму приводному валу хирургического инструмента. Активация второй приводной системы хирургического инструмента в одном направлении вращения будет обеспечивать вращение пускового ствола 3102 в первом направлении, чтобы таким образом выталкивать компрессионный ствол 3030 в дистальном направлении «DD». По мере перемещения компрессионного ствола 3030 в дистальном направлении «DD» узел 3304 кругового выталкивателя скоб выталкивается дистально для выталкивания хирургически скоб из кассеты 3306 со скобками в формирующий контакт с нижней стороной 3326 корпуса 3322 упора. Кроме того, круговой элемент 3308 скальпеля выталкивается сквозь ткань, зажатую между корпусом 3322 упора и кассетой 3306 со скобками. Активация второй приводной системы во втором направлении поворота приводит к перемещению компрессионного ствола 3030 в проксимальном направлении «PD».
Концевой эффектор 3000 может также быть оснащен различными датчиками, соединенными с контактной пластиной 3120 концевого эффектора, установленной в корпусе 3010 концевого эффектора. Например, концевой эффектор 3000 может включать в себя датчик(и) закрытия 3122, установленный(ые) в корпусе 3010 концевого эффектора и электрически соединенный(ые) с контактной пластиной 3120 концевого эффектора так, что когда концевой эффектор 3000 функционально соединен с хирургическим инструментом, датчик(и) закрытия 3122 обменивается(ются) данными с системой управления хирургического инструмента. Датчик(и) закрытия 3122 может(гут) включать в себя датчики Холла 7028, как описано ниже в связи с ФИГ. 61, 63, выполненные с возможностью обнаружения положения гайки закрытия 3084. См. ФИГ. 44. Кроме того, пусковой(ые) датчик(и) 3124 может(гут) также быть установлен(ы) в корпусе 3010 концевого эффектора и выполнен(ы) с возможностью обнаружения местонахождения пусковой гайки 3110 в гайке закрытия 3084. Пусковой(ые) датчик(и) 3124 может(гут) также включать в себя датчики Холла 7028, как описано ниже в связи с ФИГ. 61, 63, и быть электрически соединенным(и) с контактной пластиной 3120 концевого эффектора для конечной связи с системой управления хирургического инструмента, такой как процессор 7024 рукоятки, например, описанный ниже в связи с ФИГ. 61, 63, 64. Контактная пластина 3120 может быть расположена в корпусе 3020 концевого эффектора так, что когда концевой эффектор 3000 функционально соединен с хирургическим инструментом, контактная пластина 3120 концевого эффектора электрически соединена с контактной пластиной 30 хирургического инструмента, установленной в корпусе 12 хирургического инструмента, как описано выше.
Ниже описано применение концевого эффектора 3000 в связи с хирургическим инструментом 10. Однако следует понимать, что концевой эффектор 3000 может быть функционально соединен с различными другими описанными в настоящем документе конструкциями хирургических инструментов. Перед использованием ствол закрытия 3080 и пусковой ствол 3102 «зафиксированы» или расположены в их начальных положениях, чтобы способствовать прикреплению к первому и второму приводным валам 22, 42 соответственно. Например, чтобы соединить концевой эффектор 3000 с хирургическим инструментом 10, врач перемещает концевой эффектор 3000 в положение, в котором ось ствола закрытия CSA-CSA выровнена по оси с осью первого приводного вала FDA-FDA, а ось пускового ствола FSA-FSA выровнена по оси с осью второго приводного вала SDA-SDA. Гнездовой соединитель 57 на стволе закрытия 3080 вступает в функциональное взаимодействие со штырьковым соединителем 51 на первом приводном валу 22. Аналогично, гнездовой соединитель 57 на пусковом стволе 3102 вступает в функциональное взаимодействие со штырьковым соединителем 51 на втором приводном валу 42. Таким образом, находясь в этом положении, ствол закрытия 3080 функционально соединен с первым приводным валом 22, а пусковой ствол 3102 функционально соединен со вторым приводным валом 42. Контактная пластина 3120 концевого эффектора функционально соединена с контактной пластиной 30 хирургического инструмента так, что датчики 3122, 3124 в пределах концевого эффектора 3000 находятся в функциональной связи с системой управления хирургического инструмента. Чтобы удержать концевой эффектор 3000 в соединенном функциональном взаимодействии с хирургическим инструментом 10, концевой эффектор 3000 включает в себя защелку 3130 ограничителя, прикрепленную к корпусу концевого эффектора 3010 и выполненный с возможностью разъемного взаимодействия с участком корпуса 12 инструмента. Защелка 3130 ограничителя может включать в себя удерживающий выступ 3132, который может разъемно взаимодействовать с полостью 15 ограничителя, образованной в корпусе 12. См. рис. 1. При соединении вместе датчик закрытия 3122 обнаруживает положение гайки закрытия 3084, а пусковой датчик 3124 обнаруживает положение пусковой гайки 3110. Эта информация направляется системе управления хирургического инструмента. Кроме того, врач может подтвердить, что сдвигаемый узел трансмиссии (или ее передаточная каретка 62) находится в первом приводном положении. Это может быть подтверждено активацией светового индикатора 77 на корпусе 12, как описано выше. Если сдвигаемый узел трансмиссии 60 не находится в своем первом приводном положении, врач может активировать пусковой крючок 92, чтобы переместить каретку передачи 62 в первое приводное положение так, что активация пускового переключателя-качели 110 для активации двигателя 80 приведет к активации первой приводной системы 20. Если закрывающая система 3070 и пусковая система 3100 находятся в своих соответствующих начальных положениях, а в концевом эффекторе 3000 правильно установлен непустой модуль кассеты со скобками, концевой эффектор 3000 готов к использованию.
Как известно, при выполнении анастомоза с помощью кругового сшивающего инструмента сшивание скобками кишки может осуществляться с использованием обычного хирургического сшивающего инструмента путем размещения множества рядов скоб по обе стороны целевого участка (т.е. образца) кишки. Целевой участок, как правило, разрезается одновременно со сшиванием скобками. После удаления целевого образца врач вставляет упор 3320 в проксимальную часть кишки, проксимально по отношению к линии скоб. Это может быть выполнено путем введения корпуса 3322 упора в разрез, выполненный в проксимальном участке кишки, либо упор 3320 может быть введен трансанально путем установки упора 3320 на дистальном конце концевого эффектора 3000 и введения инструмента через прямую кишку. Затем врач прикрепляет ствол 3324 упора к кончику 3042 троакара концевого эффектора 3000 и вставляет упор 3320 в дистальный участок кишки. Затем врач может с помощью нити или другого обычного сшивающего приспособления прикрепить дистальный конец проксимального участка кишки к стволу 3324 упора, а также связать прикрепить проксимальный конец дистального участка кишки вокруг ствола 3324 упора с помощью другой нити.
Затем врач может перемещать в проксимальном направлении узел 3040 стяжного хомута, кончик 3042 троакара и прикрепленный к нему упор 3320, воздействуя на пусковой переключатель-качели 110, чтобы включить двигатель 80 и запустить вращение первого приводного вала 22. Эта активация приводит к перемещению упора 3320 к кассете 3306, находящейся в элементе корпуса 3302 головки 3300 сшивающего инструмента, чтобы закрыть зазор между ними, и, таким образом, взаимодействует с проксимальным концом дистального участка кишки и дистальным концом проксимального участка кишки в зазоре между ними. Врач продолжает активировать первую приводную систему 20, пока не будет достигнута требуемая степень сжатия ткани. Как только участки кишки будут зажаты между узлом 3320 упора и головкой 3300 сшивающего инструмента, врач может активировать пусковой крючок 92, чтобы передвинуть каретку передачи 62 в ее второе приводное положение, так что активация двигателя 80 приведет к повороту второго приводного вала 42. Когда каретка передачи 62 передвинута во второе приводное положение, врач может еще раз воздействовать на пусковой переключатель-качели 110, чтобы активировать вторую приводную систему 40, и чтобы пусковая система 3100 в концевом эффекторе 3000 вытолкнула дистально компрессионный ствол 3030, что также приведет к выталкиванию дистально узла 3304 кругового выталкивателя скоб и кругового элемента 3308 скальпеля. Такие действия служат для разрезания зажатых частей кишки и выталкивания хирургических скоб через оба зажатых конца кишки, таким образом соединяя участки кишки и формируя трубчатый канал. В то же время по мере выталкивания и формирования скоб циркулярный нож 3308 выталкивают через концы ткани кишечника, обрезая концы смежно с внутренним рядом скоб. После этого врач может извлечь концевой эффектор 3000 из кишечника и завершить анастомоз.
На ФИГ. 46–49 показан другой хирургический концевой эффектор 3000’, который может быть схож с описанным выше хирургическим концевым эффектором 3000, за исключением рассмотренных ниже отличий. Эти компоненты хирургического концевого эффектора 3000’, которые идентичны компонентам вышеописанного хирургического концевого эффектора 3000, будут обозначены теми же номерами элементов. Эти компоненты хирургического концевого эффектора 3000’, которые могут быть сходны в работе, но не идентичны соответствующим компонентам хирургического концевого эффектора 3000, будут обозначаться теми же номерами компонентов в сочетании с “’’. Как видно на Фиг. 46–49, хирургический концевой эффектор 3000’ включает в себя узел расцепления привода, который в целом обозначен номером позиции 3090 и преимущественно выполнен с предоставлением врачу возможности высвободить дистальный участок приводного механизма от проксимального участка приводного механизма.
В представленном варианте осуществления узел 3090 высвобождения привода используется совместно с закрывающей системой 3070’, таким образом, в случае случайного заедания или иного ограничения работоспособности дистального участка закрывающей системы врач может быстро механически отсоединить дистальный участок приводного механизма от проксимального участка приводного механизма закрывающей системы механическим путем. Точнее и со ссылкой на ФИГ. 47 узел стяжного хомута 3040 и кончик троакара 3042 (см. ФИГ. 42, 43 и 45) могут именоваться «дистальный участок приводного механизма» 3092 закрывающей системы 3070’, а закрывающий ствол 3080 и узел 3084 закрывающей гайки могут, например, именоваться «проксимальный участок приводного механизма» 3094 закрывающей системы 3070’. Как показано на ФИГ. 47, одна форма узла 3090 высвобождения привода включает в себя дистальный соединительный элемент 3095, прикрепленный к проксимальному концу узла стяжного хомута 3040. Дистальный соединительный элемент 3095 может быть прикреплен к узлу стяжного хомута 3040 путем установки с натягом, адгезивного соединения, низкотемпературной пайки, сварки и т.п., или любой комбинации таких крепежных конфигураций. Размер дистального соединительного элемента 3095 позволяет его принимать с возможностью скольжения внутри паза 3097 в проксимальном соединительном элементе 3085’, прикрепленном к узлу 3084 закрывающей гайки. Дистальный соединительный элемент 3095 включает в себя дистальное отверстие 3096, проходящее через него и выполненное с возможностью совмещения по оси с проксимальным отверстием 3098 в проксимальном соединительном элементе 3085’ при размещении дистального соединительного элемента 3095 внутри паза 3097. См. ФИГ. 48. Узел 3090 высвобождения привода дополнительно содержит соединительный штифт 3099 привода, размер которого позволяет его принимать внутри совмещенных по оси отверстий 3096, 3098, надежно соединяя дистальный соединительный элемент 3095 с проксимальным соединительным элементом 3085’. Другими словами, соединительный штифт 3099 привода служит для механического соединения дистальной части приводного механизма 3092 с проксимальной частью приводного механизма 3094 с возможностью высвобождения. Соединительный штифт 3099 привода проходит вдоль оси соединения CA-CA, поперечной оси ствола закрытия CSA. Для обеспечения зазора, необходимого для перемещения соединительного штифта 3099 привода по оси относительно пусковой гайки 3110, в пусковой гайке 3110 предусмотрен осевой паз 3111. Как видно на ФИГ. 46, участок 3014’ корпуса концевого эффектора снабжен проходящим по оси зазором 3016, способствующим перемещению соединительного штифта 3099 привода по оси при активации закрывающей системы 3070’. Такая конфигурация позволяет врачу быстро отсоединить дистальный участок приводного механизма 3092 от проксимального участка приводного механизма 3094 в любой момент во время применения концевого эффектора 3000’ путем удаления или вытягивания соединительного штифта 3099 привода в поперечном направлении из отверстий 3096, 3098, что позволяет высвободить дистальный соединительный элемент 3095 от проксимального соединительного элемента 3085’.
Хотя узел 3090 высвобождения привода описан применительно к закрывающей системе 3070’ концевого эффектора 3000’, в альтернативном варианте узел высвобождения привода может применяться вместе с пусковой системой 3100 концевого эффектора 3000’. В других конфигурациях узел 3090 высвобождения привода может быть связан с закрывающей системой, и второй узел высвобождения привода может быть связан с пусковой системой. Таким образом, один или оба проксимальных участка приводного механизма могут быть выборочно механически отсоединены от их соответствующих дистальных участков приводного механизма. Дополнительно такой узел высвобождения привода может эффективно использоваться вместе с системами закрытия и/или пуска по меньшей мере некоторых других хирургических концевых эффекторов, описанных здесь, включая, без ограничений, например, концевой эффектор 1000 и концевой эффектор 2000 и их соответствующие эквивалентные конфигурации.
На ФИГ. 50-53 показан другой хирургический концевой эффектор 2000’, который может быть идентичен с описанным выше хирургическим концевым эффектором 2000, за исключением рассмотренных ниже отличий. Эти компоненты хирургического концевого эффектора 2000’, которые идентичны компонентам вышеописанного хирургического концевого эффектора 2000, будут обозначены теми же номерами элементов. Эти компоненты хирургического концевого эффектора 2000’, которые могут быть сходны в работе, но не идентичны соответствующим компонентам хирургического концевого эффектора 2000, будут обозначаться теми же номерами компонентов в сочетании с “’’. Как показано на ФИГ. 51-53, хирургический концевой эффектор 2000’ может быть обеспечен индикаторными конструкциями для обеспечения визуальной индикации статуса срабатывания систем закрытия и пуска.
Конкретнее и со ссылкой на ФИГ. 51 и 52, закрывающая система 2070 включает в себя узел статуса закрывающей системы, по существу обозначенный как 2090. В одной форме, например, узел статуса закрывающей системы 2090 включает в себя элемент индикации закрытия 2092, прикрепленный к или иначе проходящий от закрывающей гайки 2084’. Узел статуса закрывающей системы 2090 дополнительно включает в себя окошко индикации закрытия 2094 или отверстие в корпусе 2010 концевого эффектора так, что врач может оценить положение элемента индикации закрытия 2092, наблюдая за элементом индикации закрытия 2092 через окошко индикации закрытия 2094. Аналогично этому, пусковая система 2100’ может включать в себя узел статуса пусковой системы, по существу обозначенный как 2130. В одной форме, например, узел 2130 статуса пусковой системы включает в себя элемент индикации пуска 2132, прикрепленный к или иначе проходящий от пусковой гайки 2110’. Узел статуса пусковой системы 2130 дополнительно включает в себя окошко индикации пуска или отверстие 2134 в корпусе 2010 концевого эффектора так, что врач может оценить положение элемента индикации пуска 2132, наблюдая за элементом индикации пуска 2132 через окошко индикации пуска 2134.
Узел статуса закрывающей системы 2090 и узел статуса пусковой системы 2130 показывают механическое состояние закрывающей системы 2070 и пусковой системы 2100. Врач может по существу следить за механическим состоянием дистального конца концевого эффектора, но иногда он покрыт или загорожен тканью. Механическое состояние проксимального участка концевого эффектора невозможно увидеть без конструкции окошка или выступающего индикатора. Кроме того, цветовая маркировка на наружной поверхности ствола и/или на индикаторе также может применяться для уведомления врача о полном закрытии или запуске концевого эффектора (например, индикатор полностью на зеленом цветовом поле – полное закрытие). Например, на элемент индикации закрытия 2092 может быть нанесена отметка закрытия 2093, видимая через окошко индикации закрытия 2094. Кроме того, корпус 2010 может иметь первое устройство индикации закрытия 2095 и второе устройство индикации закрытия 2096 рядом с окошком индикации закрытия 2094 для оценки положения индикатора закрытия 2092. Например, первое устройство индикации закрытия 2095 может содержать первый ригель первого цвета (например, оранжевый, красный и т.п.), и второе устройство индикации закрытия может содержать ригель или сегмент второго цвета, который отличается от первого цвета (например, зеленый). При совмещении отметки закрытия 2093 на элементе индикации закрытия 2092 с самым проксимальным концом ригеля первого устройства индикации закрытия 2095 (это положение обозначено номером элемента 2097 на ФИГ. 50) врач может видеть, что закрывающая система 2070 находится в неактивированном положении. При расположении отметки закрытия 2093 в пределах ригеля первого устройства индикации закрытия 2095 врач может видеть, что закрывающая система 2070 частично активирована, но не активирована полностью или полностью не закрыта. При совмещении отметки закрытия 2093 со вторым устройством индикации закрытия 2096 (обозначено номером элемента 2098 на ФИГ. 50) врач может видеть, что закрывающая система 2070 полностью активирована или находится в полностью закрытом положении.
Аналогично этому, на элемент индикации пуска 2132 может быть нанесена отметка пуска 2133, видимая через окошко индикации пуска 2134. Кроме того, сегмент 2014’ корпуса может иметь первое устройство индикации пуска 2135 и второе устройство индикации пуска 2136 рядом с окошком индикации пуска 2134 для оценки положения индикатора пуска 2132. Например, первое устройство индикации пуска 2135 может содержать первый пусковой ригель первого цвета пуска (например, оранжевый, красный и т.п.), и второе устройство индикации пуска может содержать второй пусковой ригель или сегмент второго цвета пуска, отличающегося от первого цвета пуска (например, зеленый). При совмещении отметки пуска 2133 на элементе индикации пуска 2132 с самым проксимальным концом ригеля первого устройства индикации пуска 2135 (это положение представлено номером элемента 2137 на ФИГ. 50) врач может видеть, что пусковая система 2100 находится в неактивированном положении. При выравнивании отметки пуска 2133 в пределах ригеля первого устройства индикации пуска 2135 врач может видеть, что пусковая система 2100 частично активирована, но не полностью активирована или не полностью запущена. При выравнивании отметки пуска 2133 со вторым устройством индикации пуска 2136 (обозначено номером элемента 2138 на ФИГ. 50) врач может видеть, что пусковая система 2170 полностью приведена, активирована или полностью запущена. Таким образом, врач может определить степень срабатывания систем закрытия и пуска, наблюдая за положением индикаторов через соответствующие окошки.
В альтернативной конфигурации окна индикации 2094 и 2134 могут быть предусмотрены в корпусе концевого эффектора 2010’ так, что когда закрывающая система 2070 и пусковая система 2100’ находятся в стартовом или неактивированном положении, соответствующие индикаторы 2092, 2132 могут быть полностью видны через окошки индикации 2094, 2134, соответственно. При срабатывании закрывающей системы 2070 и пусковой системы 2100’ их индикаторы 2092, 2132 перемещаются за пределы окошка индикации 2094, 2134. Затем врач может оценить степень активации каждой из систем 2070, 2100’, проверив насколько индикаторы 2092, 2132 видны через окошки 2094, 2134.
Узел статуса закрывающей системы 2090 и узел статуса пусковой системы 2130 отражают механическое состояние закрывающей системы 2070 и пусковой системы 2100, независимо от того прикреплен ли концевой эффектор 2000’ к рукоятке или корпусу хирургического инструмента или нет. Если концевой эффектор 2000 прикреплен к рукоятке или корпусу, узел статуса закрывающей системы 2090 и узел статуса пусковой системы 2130 позволят врачу определить механическое состояние этих систем по первичной или вторичной проверке статуса, показанного на рукоятке или корпусе хирургического инструмента. Узел статуса закрывающей системы 2090 и узел статуса пусковой системы 2130 также служат для первичной проверки, когда концевой эффектор 2000’ отсоединен от рукоятки или корпуса хирургического инструмента. Дополнительно такие узлы статуса закрывающей системы и статуса пусковой системы могут эффективно использоваться вместе с системами закрытия и/или пуска по меньшей мере в некоторых других хирургических концевых эффекторах, описанных в настоящем документе, включая, но, без ограничений, например, концевой эффектор 1000 и концевой эффектор 3000, и их соответствующие эквивалентные конфигурации.
На ФИГ. 54–60 показан другой хирургический концевой эффектор 2000’’, который может быть идентичен с описанным выше хирургическим концевым эффектором 2000’, за исключением рассмотренных ниже отличий. Компоненты хирургического концевого эффектора 2000”, такие же, как компоненты описанного выше хирургического концевого эффектора 2000’ и/или концевого эффектора 2000, будут обозначены теми же номерами элементов. Компоненты хирургического концевого эффектора 2000”, которые могут быть сходны в работе, но не идентичны соответствующим компонентам хирургического концевого эффектора 2000’ и/или 2000, будут обозначаться теми же номерами компонентов в сочетании с “’’’. Как показано на ФИГ. 54–60, хирургический концевой эффектор 2000” включает в себя узел высвобождения привода, по существу обозначенный как 2200, и преимущественно выполнен с предоставлением врачу возможности высвободить дистальный участок приводного механизма от проксимального участка приводного механизма.
В представленном варианте осуществления узел 2200 высвобождения привода используется вместе с закрывающей системой 2070” концевого эффектора 2000”, таким образом, в случае случайного заедания или иного ограничения работоспособности дистального участка закрывающей системы врач может быстро механически отсоединить дистальный участок приводного механизма от проксимального участка приводного механизма закрывающей системы. Точнее и со ссылкой на ФИГ. 56 узел закрывающего ригеля 2072 может также именоваться «дистальным участком приводного механизма» 2202 закрывающей системы 2070”, а закрывающий ствол 2080 и узел 2084” закрывающей гайки могут, например, именоваться «проксимальным участком приводного механизма» 2204 закрывающей системы 2070”. Как показано на ФИГ. 59, узел 2084” закрывающей гайки, будучи по существу идентичным описанным выше узлам 2084, 2084’ закрывающих гаек, предусмотрен в двух частях. Конкретнее, узел 2084” закрывающей гайки включает в себя верхний резьбовой 2210, выполненный с возможностью резьбового взаимодействия с закрывающим стволом 2080, и нижний участок 2214, обеспечивающий перемещение пусковой гайки 2110 в нем по оси, как описано выше. Нижний участок 2214 узла 2084” закрывающей гайки прикреплен непосредственно к узлу закрывающего ригеля 2072 и включает в себя элемент индикации закрытия 2092”, работающий по тому же принципу, что и описанный выше индикатор закрытия 2092.
По меньшей мере в одной форме узел 2200 высвобождения привода включает в себя соединительный штифт 2220 привода, служащий для присоединения нижнего участка 2214 узла 2084” закрывающей гайки к верхнему участку 2210. Как показано на ФИГ. 59, например, верхний участок 2210 узла 2084” закрывающей гайки включает в себя сегмент 2212 паза в виде ласточкиного хвоста, выполненный с возможностью выравнивания со вторым сегментом паза в виде ласточкиного хвоста 2216 на нижнем участке 2214 узла 2084” закрывающей гайки. При совмещении первого и второго сегментов 2212, 2216 паза в виде ласточкиного хвоста, как показано на ФИГ. 59, они образуют отверстие 2215, в которое может вставляться участок 2222 цилиндра соединительного штифта 2220 привода для соединения вместе верхнего и нижнего участков 2010 и 2014, как показано на ФИГ. 56. Другими словами, соединительный штифт 2220 привода служит для механического соединения дистального участка приводного механизма 2202 с проксимальным участком приводного механизма 2204 закрывающей системы 2070” с возможностью высвобождения. Соединительный штифт 2220 привода проходит вдоль оси соединения CA-CA, поперечной оси ствола закрытия CSA. См. ФИГ. 56. Для обеспечения зазора, необходимого для перемещения соединительного штифта 2220 привода по оси вместе с узлом 2084” закрывающей гайки, в сегменте корпуса 2014” корпуса 2010” концевого эффектора предусмотрен проходящий по оси паз 2224. Такая конфигурация позволяет врачу быстро отсоединить дистальный участок 2202 приводного механизма от проксимального участка 2204 приводного механизма в любой момент в процессе использования концевого эффектора 2000” путем извлечения или вытягивания соединительного штифта 2220 привода в поперечном направлении из отверстия 2215, образованного сегментами 2212, 2216 паза в виде ласточкиного хвоста. После извлечения соединительного штифта 2220 привода из отверстия 2215 нижний участок 2214 узла закрытия 2084” может перемещаться относительно верхнего участка 2212, таким образом позволяя высвободить ткань из положения между модулем 2060 кассеты и узлом 2140 упора.
На ФИГ. 54–56 представлен концевой эффектор 2000” в «открытом» положении перед применением. Как показано на этих чертежах, например, модуль 2060 кассеты установлен и готов к применению. На ФИГ. 57 и 58 представлен концевой эффектор 2000 в закрытом состоянии. Другими словами, закрывающий ригель 2080 повернут к узлу 2084” закрывающей гайки в дистальном направлении DD. Поскольку нижний участок 2214 узла 2084” закрывающей гайки прикреплен к верхнему участку 2210 посредством соединительного штифта 2220 привода, узел 2072 закрывающего ригеля (поскольку он прикреплен к нижнему участку 2214) также перемещается дистально в закрытое положение для захвата целевой ткани между модулем 2260 кассеты и узлом 2140 упора. Как обсуждается выше, при дистальном перемещении седловидной кнопки-ползунка 2162 на корпусе 2010” удерживающий штифт проходит через корпус кассеты в узел 2140 упора, зажимая, таким образом, ткань между модулем 2060 кассеты и узлом 2140 упора. Как подробно обсуждается выше, при дистальном перемещении узла 2084” закрывающей гайки пусковая гайка 2110 также перемещается дистально, что заставляет проксимальный участок 2106 пускового ствола 2102 выйти из удлиненного канала внутри гнездового соединителя 57’. См. ФИГ. 58. На ФИГ. 59 показан соединительный штифт 2220 привода, извлеченный из отверстия 2215, образованного сегментами 2212, 2216 паза в виде ласточкина хвоста. После извлечения соединительного штифта 2220 привода из отверстия 2215 проксимальный участок 2202 приводного механизма (узел 2072 закрывающего ригеля) может быть перемещен в проксимальном направлении «PD» путем проксимального перемещения седловидной кнопки-ползунка 2162. Такое перемещение кнопки 2162 переместит узел 2072 закрывающего ригеля, нижний участок 2014 узла закрывающей гайки 2084”, пусковую гайку 2110 и узел 2112 пускового ригеля, а также будет удерживать штифт в проксимальном положении. Такое перемещение позволит высвободить ткань из положения между модулем 2060 кассеты и узлом 2140 упора.
на ФИГ. 61 представлена блок-схема модульного хирургического инструмента 7000 с приводом, содержащего рукояточный участок 7002 и стволовой участок 7004; Модульный хирургический инструмент 7000 с приводом является характерным представителем модульной системы хирургического инструмента, по существу обозначенной пунктом 2, которая в одной форме включает в себя хирургический инструмент 10 с приводом, который может использоваться в сочетании с различными хирургическими концевыми эффекторами, такими как, например, концевые эффекторы 1000, 2000 и 3000, как показано на ФИГ. 1. Учитывая приведенное выше детальное описание различных функциональных и операционных аспектов модульного хирургического инструмента 10 с приводом, для краткости и ясности изложения эти детали не будут повторяться в последующем описании, относящемся к ФИГ. 61–64. Кроме этого, описание ФИГ. 61–64 будет сконцентрировано главным образом на функциональных и операционных аспектах электрических систем и подсистем модульного хирургического инструмента 7000 с приводом, которые могут быть приложены полностью или частично к вышеизложенному описанию модульного хирургического инструмента с приводом.
Соответственно, как показано на ФИГ. 61, модульный хирургический инструмент 7000 с приводом, содержит рукояточный участок 7002 и стволовой участок 7004. Рукояточный и стволовой участки 7002, 7004 содержат соответствующие электрические подсистемы 7006, 7008, электрически соединенные посредством коммуникационных связей и интерфейса 7010 питающего устройства. Компоненты электрической подсистемы 7006 рукояточного участка 7002 удерживаются на вышеописанной плате управления 100. Коммуникационные связи и интерфейс 7010 питающего устройства выполнены так, что возможен свободный обмен электрическими сигналами и питанием между рукояточным участком 7002 и стволовым участком 7004.
В представленном примере электрическая подсистема 7006 рукояточного участка 7002 электрически соединена с различными электрическими элементами 7012 и дисплеем 7014. В одном варианте дисплей 7014 представляет собой дисплей на органических светодиодах (OLED), однако не следует ограничивать дисплей 7014 этим контекстом. Электрическая подсистема 7008 стволового участка 7004 имеет электрическое соединение с различными электрическими элементами 7016, которые будут описаны ниже более подробно.
В одном аспекте электрическая подсистема 7006 рукояточного участка 7002 содержит соленоидный толкатель 7018, акселерометр 7020, контроллер/драйвер 7022 двигателя, процессор 7024 рукоятки и регулятор напряжения 7026, и выполнена с возможностью принимать входные сигналы от множества переключателей 7028. Хотя в представленном варианте осуществления переключатели 7028 обозначены как переключатели на датчике Холла, переключатели 7028 не имеют ограничений в этом контексте. В различных аспектах датчики Холла или переключатели 7028 могут располагаться в участке концевого эффектора инструмента, стволе и/или рукоятке.
В одном аспекте электрическая подсистема 7006 рукояточного участка 7002 выполнена с возможностью принимать сигналы от соленоида 7032, датчика 7034 положения зажима, переключателя 7036 пускового положения, двигателя 7038, батареи 7040, платы 7042 интерфейса OLED, переключателя 7044 открытия, переключателя 7046 закрытия и пускового переключателя 7048. В одном аспекте двигатель 7038 представляет собой бесщеточный двигатель постоянного тока, хотя в различных аспектах двигатель не имеет ограничений в этом контексте. Тем не менее описание двигателя 7038 может быть приложено к вышеописанным двигателям 80, 480, 580, 680, 750 и 780. Соленоид 7032 является характерным примером ранее описанного сдвигающего соленоида 71.
В одном аспекте электрическая подсистема 7008 стволового участка 7004 содержит процессор 7030 ствола. Электрическая подсистема 7008 ствола выполнена с возможностью принимать сигналы от различных переключателей и датчиков, размещенных в участке концевого эффектора инструмента, и указывающих состояние зажимных браншей и режущего элемента в концевом эффекторе. Как показано на ФИГ. 61, электрическая подсистема 7008 ствола выполнена с возможностью принимать сигналы от переключателя 7050 открытого состояния зажима, переключателя 7052 закрытого состояния зажима, переключателя 7054 состояния начала пуска и переключателя 7056 состояния конца пуска, которые указывают состояние зажима и режущего элемента.
В одном аспекте процессор 7024 рукоятки может представлять собой микроконтроллер общего назначения, подходящий для применения в медицинских и хирургических инструментах, и включающий в себя средства управления перемещениями. В одном варианте процессор 7024 рукоятки может представлять собой микроконтроллер TM4C123BH6ZRB производства Texas Instruments. Процессор 7024 рукоятки может содержать, среди других элементов, 32-битное процессорное ядро ARM® Cortex™-M4 80 МГц с системным таймером (SysTick), интегрированным встроенным векторным контроллером прерываний (NVIC), активизирующим контроллером прерываний (WIC) с пропусканием по таймеру, блоком защиты памяти (MPU), модулем обработки операций с плавающей точкой (FPU) одинарной точности, соответствующий стандарту IEEE754, встроенными макрокомандами трассировки и портом трассировки, блоком управления системой (SCB) и набором инструкций thumb-2. Процессор 7024 рукоятки может содержать встроенную в интегральную схему память, такую как 256 КБ одноцикловой флеш-памяти с частотой до 40 МГц. Может быть предусмотрен буфер предвыборки для повышения производительности выше 40 МГц. Дополнительная память включает в себя 32 кБ одноцикловой статической ОЗУ с произвольной выборкой (SRAM), внутренняя ПЗУ с загруженным программным обеспечением TivaWare™ for C Series, 2 КБ перепрограммируемого ПЗУ, среди других элементов, таких как два модуля контроллерной сети (Controller Area Network, CAN), использующих протокол CAN версии 2.0 часть A/B со скоростью передачи до 1 Мбит/с.
В одном аспекте процессор 7024 рукоятки может содержать передовые средства интеграции с последовательной передачей данных, включая восемь универсальных асинхронных приемников/передатчиков (UART) с поддержкой IrDA 9 бит, и ISO 7816 (одна схема UART со статусом модема и управлением потоком данных модема). Предусмотрены четыре модуля синхронного последовательного интерфейса (Synchronous Serial Interface, SSI) для поддержки работы с синхронными последовательными интерфейсами Freescale SPI, MICROWIRE или Texas Instruments. Кроме этого, шесть модулей Inter-Integrated Circuit (I2C) обеспечивают, например, стандартную (100 Кбит/с) и быструю (400 кбит/с) передачу и поддержку отправки и приема данных в качестве ведущего или ведомого устройства.
В одном аспекте процессор 7024 рукоятки также содержит 32-канальный конфигурируемый контроллер μDMA ARM PrimeCell®, позволяющий снять с процессора Cortex™-M4 задачи по передаче данных, что дает возможность более эффективно применять процессор и имеющуюся пропускную способность шины. Функция поддержки работы с аналоговыми сигналами включает в себя, например, два 12-битных аналого-цифровых конвертера (АЦП) с 24 аналоговыми входными каналами и частотой дискретизации один миллион измерений/с, три аналоговых компаратора, 16 цифровых компараторов и один встроенный в микросхему регулятор напряжения.
В одном аспекте процессор рукоятки 7024 также имеет передовую функцию управления перемещениями, такую как восемь генераторных блоков широтно-импульсной модуляции (ШИМ), причем каждый с одним 16-битным счетчиком, двумя ШИМ-компараторами, генератором сигнала для ШИМ, генератором временных пауз и селектором прерывания/АЦП-триггера. Предусмотрены восемь аварийных вводов ШИМ для прекращения работы с малой задержкой. Предусмотрены два модуля интерфейса импульсных датчиков положения (quadrature encoder interface, QEI) с позиционным интегратором для отслеживания положения датчиков и регистрации скорости с использованием встроенного таймера.
В одном аспекте предусмотрены два совместимых с ARM FiRM сторожевых таймера, а также шесть 32-битных таймеров общего назначения (до двенадцати 16-битных). Предусмотрены шесть широких 64-битных таймеров общего назначения (до двенадцати 32-битных), а также, например, 12 16/32-битных и 12 32/64-битных контактов захвата/сравнения/ШИМ (capture compare PWM, CCP). Могут быть предусмотрены до 120 входов/выходов общего назначения (GPIO), в зависимости от конфигурации, с программируемым контролем прерываний GPIO и конфигурации контактов и высокой степенью гибкости при мультиплексировании контактов. Процессор 7024 рукоятки также содержит маломощный модуль гибернации с резервным питанием от батареи и часами реального времени. Предусмотрены множество источников сигналов времени для часов микроконтроллерной системы, и включают в себя прецизионный осциллятор (PIOSC), главный осциллятор (MOSC), внешний осциллятор 32,768 кГц для модуля гибернации и внутренний осциллятор 30 кГц.
В одном аспекте акселерометр 7020 электрической подсистемы 7006 рукояточного участка 7002 может представлять собой датчик перемещения на основе микроэлектромеханической системы (MEMS). Как известно, технология MEMS сочетает компьютеры с миниатюрными механическими устройствами, такими как датчики, вентили, шестерни, зеркала и исполнительные механизмы, встроенные в полупроводниковые чипы. В одном примере акселерометр 7020 на основе технологии MEMS может представлять собой сверхмаломощный 8-битный трехосевой цифровой акселерометр, например, такой как LIS331DLM производства STMicroelectronics.
В одном аспекте акселерометр 7020, такой как LIS331DLM, может представлять собой сверхмаломощный высокоэффективный трехосевой линейный акселерометр, относящийся к «нано» семейству, со стандартным выводом через цифровой последовательный интерфейс I2C/SPI, подходящий для сообщения с процессором 7024 рукоятки. Акселерометр 7020 может характеризоваться рабочими режимами со сверхнизким потреблением питания, что обеспечивает передовые возможности экономии питания и высокотехнологичные функции спящего режима - выхода из спящего режима. Акселерометр 7020 может включать в себя динамические выбираемые пользователем полные шкалы ±2g/±4g/±8g и способен измерять ускорения с частотой выходных данных, например, от 0,5 Гц до 400 Гц.
В одном аспекте акселерометр 7020 может включать в себя функцию самопроверки, позволяющую пользователю проверять функционирование датчика при конечном применении. Акселерометр 7020 может быть выполнен с возможностью генерации сигнала прерывания в результате событий инерционной активизации/свободного падения, а также в зависимости от положения самого инструмента. Пороги и временные параметры генераторов прерываний могут программироваться на ходу.
В одном аспекте контроллер/драйвер 7022 двигателя может представлять собой трехфазный бесщеточный контроллер постоянного тока (BLDC) и драйвер на канальных МОП-транзисторах (MOSFET), такой как, например, контроллер/драйвер A3930 производства Allegro. Контроллер/драйвер 7022 3-фазного бесщеточного двигателя постоянного тока можно применять с N-канальными МОП-транзисторами с внешним питанием, например, с целью приведения в действие BLDC-двигателя 7038. В одном варианте контроллер/драйвер 7022 двигателя может включать схему, необходимую для эффективной трехфазной электроприводной системы. В одном варианте контроллер/драйвер 7022 двигателя содержит регулятор накачки заряда для обеспечения адекватного (>10 В) напряжения запирания вентиля для напряжений батареи до 7 В и позволяет контроллеру/драйверу 7022 двигателя работать при сниженном напряжении запирания вентиля, при напряжении батареи вплоть до 5,5 В. Рассеивание мощности в регуляторе накачки заряда можно свести к минимуму путем переключения из режима удвоения напряжения при низком подаваемом напряжении в режим сброса при номинальном рабочем напряжении 14 В. В одном аспекте для обеспечения необходимого для работы N-канальных МОП-транзисторов напряжения, более высокого, чем напряжение батареи, используется форсирующий конденсатор. Внутренний генератор накачки заряда для привода верхнего плеча обеспечивает работу с постоянным током (100% рабочий цикл).
Максимальный ток нагрузки регулирует внутренняя схема управления ШИМ-током фиксированной частоты. Предел пикового нагрузочного тока можно задать подбором входного референтного напряжения и внешнего измерительного резистора. Частоту ШИМ можно задать при помощи выбранной пользователем резисторно-емкостной (RC) тайминговой сети. Для дополнительной гибкости ввод ШИМ можно применять для контроля скорости и вращающего момента, позволяя внутренней схеме управления током задать предел по максимальному току.
Эффективность работы контроллера/драйвера 7022 двигателя можно повысить, используя синхронное детектирование. Силовые МОП-транзисторы защищены от пробоя интегрированной схемой контроля критического потенциала с бестоковой паузой. Бестоковую паузу можно задать при помощи одного внешнего резистора.
В одном аспекте контроллер/драйвер 7022 двигателя указывает на логическую ошибку в результате комбинации всех нулей на вводах от датчиков Холла. Другие особенности контроллера/драйвера 7022 двигателя включают в себя высокотоковый трехфазный механизм затвора для N-канальных МОП-транзисторов, синхронное детектирование, защита от поперечной проводимости, накачка заряда и накачка заряда с прерыванием для 100% ШИМ, интегрированная схема коммутационного декодера, работа в диапазоне напряжений от 5,5 до 50 В, диагностический выход, обеспечение подачи питания +5 В на датчики Холла и режим сна с низким потреблением тока.
В одном аспекте модульный хирургический инструмент 7000 с приводом оснащен бесщеточным электродвигателем постоянного тока 7038 (BLDC-двигатель, BL-двигатель), также именуемым электродвигателем с электронной коммутацией (ECM, EC-двигатель). Одним из таких двигателей является BLDC-двигатель B0610H4314 производства Portescap. BLDC-двигатель B0610H4314 может быть автоклавируемым. BLDC-двигатель 7038 представляет собой синхронный двигатель с электропитанием от источника постоянного тока через интегрированный инверторный/импульсный блок питания, который генерирует переменный электрический сигнал для приведения в действие двигателя, такой как драйвер/контроллер 7022 двигателя, описанный в вышеприведенных абзацах. В этом контексте переменный ток не предполагает синусоидальной формы волны, а предполагает двунаправленный ток без ограничений на форму волны. Дополнительные датчики и электронные компоненты управляют выходной амплитудой и формой волны инвертора (и, таким образом, процентом/эффективностью использования шины постоянного тока) и частоту (т.е. скорость ротора).
Роторная часть BLDC-двигателя 7038 представляет собой синхронный двигатель с постоянным магнитом, но в других аспектах BLDC-двигатели также могут представлять собой вентильно-индукторные или индукционные двигатели. Хотя некоторые бесщеточные двигатели постоянного тока можно описать как шаговые двигатели, термин «шаговый двигатель» обычно применяют к двигателям, которые выполнены с возможностью работы в режиме, в котором их часто останавливают с определенным угловым положением ротора.
В одном аспекте контроллер/драйвер 7022 BLDC-двигателя должен управлять поворотом ротора. Соответственно, контроллер/драйвер 7022 BLDC-двигателя нуждается в каких-то механизмах определения ориентации/положения ротора (относительно катушек статора). В одном варианте роторная часть BLDC-двигателя 7038 выполнена с датчиками Холла или преобразователем углового положения, чтобы напрямую измерять положение ротора. В других вариантах, чтобы вывести положение ротора, измеряют обратную электродвижущую силу (ЭДС) в пассивных катушках, что устраняет необходимость в отдельных датчиках Холла и, таким образом, их часто называют бездатчиковыми контроллерами.
В одном аспекте контроллер/драйвер 7022 BLDC-двигателя имеет 3 двусторонних вывода (т.е. трехфазный выход с регулируемой частотой), которыми управляет логическая схема. В других, более простых контроллерах, могу использоваться компараторы для определения опережения для выходной фазы, тогда как в более передовых контроллерах используется микроконтроллер для контроля ускорения, управления скоростью и для тонкой настройки эффективности.
Исполнительные механизмы, генерирующие линейное перемещение, называются линейными двигателями. Преимущество линейных двигателей состоит в том, что они могут генерировать линейное перемещение без необходимости в трансмиссионной системе, такой как «шар и ходовой винт», «реечно-шестереночная передача», кулачок, шестерни или ремни, которые были бы необходимы для роторных двигателей. Известно, что трансмиссионные системы уменьшают скорость реакции и снижают точность. Прямой привод, BLDC-двигатель 7038, может содержать имеющий пазы статор с магнитными зубцами и перемещающийся исполнительный механизм, который содержит постоянные магниты и катушечные обмотки. Для получения линейного перемещения контроллер/драйвер 7022 BLDC-двигателя возбуждает катушечные обмотки в исполнительном механизме, вызывая взаимодействие магнитных полей, приводящее к линейному перемещению.
В одном аспекте BLDC-двигатель 7038 представляет собой бесщеточный двигатель постоянного тока Portescap BO610, который обеспечивает комбинацию долговечности, эффективности, вращающего момента и скорости в кожухе, подходящем для применения в модульном хирургическом инструменте 7000 с приводом. Такие BLDC-двигатели 7038 обеспечивают подходящую интенсивность вращающего момента, скорость, управление положением и длительный срок службы. В беспазовом BLDC-двигателе 7038 применяется не содержащая железа цилиндрическая катушка, выполненная с помощью той же методики намотки, как в не содержащих железо двигателях постоянного тока. Пазовые BLDC-двигатели 7038 также можно подвергать автоклавированию. Пазовый BLDC-двигатель 7038 может включать в себя статор, состоящий из уложенных стальных пластин с обмотками, помещенными в прорези, которые вырезаны по оси вдоль внутренней периферии. Бесщеточный пазовый BLDC-двигатель 7038 постоянного тока обеспечивает высокую интенсивность вращающего момента и рассеивания тепла, а также высокое ускорение. Трехфазная конфигурация BLDC-двигателя 7038 включает в себя соединения по схеме «звезда», датчики Холла, а подаваемое напряжение составляет 4,5-24 В. Корпус BLDC-двигателя 7038 может быть изготовлен из материала 303SS, а ствол может быть изготовлен из материала 17-4ph.
В одном аспекте переключатели 7028 на датчиках Холла могут представлять собой датчики Холла, продаваемые под торговым наименованием BU520245G, и представляющие собой униполярные датчики Холла на интегральной микросхеме. Такие датчики работают в диапазоне напряжения питания 2,4–3,6 В.
В одном аспекте в регуляторе напряжения 7026 вместо обычного проходного PNP транзистора используется проходной элемент p-канальной МОП-структуры. Поскольку проходной элемент p-канальной МОП-структуры ведет себя как резистор низкого номинала, малое падение напряжения, как правило, 415 мВ при нагрузочном токе 50 A, является прямо пропорциональным нагрузочному току. Низкий ток покоя (обычно 3,2 мкА) стабилен по всему диапазону выходного тока нагрузки (от 0 мА до 50 мА).
В одном аспекте регулятор напряжения 7026 представляет собой регулятор с малым падением напряжения (LDO), такой как LDO-регулятор напряжения TPS71533 производства Texas Instruments. Такие LDO-регуляторы напряжения 7026 обладают такими преимуществами, как высокое входное напряжение, малое падение напряжения, работа при низком уровне питания и миниатюрный корпус. Регулятор напряжения 7026 может работать при входном диапазоне от 2,5 В до 24 В и стабилен с любым конденсатором (≥ 0,47 мкФ). Малое падение напряжения и низкий ток покоя позволяют работать при чрезвычайно низком уровне питания, и, следовательно, регулятор напряжения 7026 подходит для питания интегральных схем, управляющих батареями. В частности, регулятор напряжения 7026 включается, как только прилагаемое напряжение достигает минимального входного напряжения, и быстро становится доступным выходное напряжение для питания постоянно работающих заряжающих батареи интегральных схем рукояточного участка 7002.
В одном аспекте батарея 7040 представляет собой литий-ион-полимерную (LIPO) батарею; полимер-литий-ионные или более часто литий-полимерные батареи (сокращенные названия Li-poly, Li-Pol, LiPo, LIP, PLI или LiP) являются перезаряжаемыми (аккумуляторными) батареями. LIPO-батарея 7040 может содержать несколько идентичных аккумуляторных ячеек, подключенных параллельно для увеличения токовой емкости, и часто они предлагаются в виде последовательно подключаемых «блоков» для увеличения общего доступного напряжения.
Дополнительное питание для модульного хирургического инструмента 7000 с приводом может обеспечивать шаговый преобразователь пост.ток - пост.ток 7058 (ФИГ. 63-A), оптимизированный для сфер применения с высокой плотностью мощности, таких как семейство TPS6217X производства Texas Instruments. Может применяться высокая частота переключений, как правило, 2,25 МГц, чтобы позволять применение малых катушек индуктивности и обеспечивать быстрый нестационарный ответ, а также высокая точность выходного напряжения в результате использования топологии DCS-Control™.
Благодаря широкому диапазону рабочих входных напряжений от 3 до 17 В синхронный шаговый конвертер пост.ток - пост.ток 7058 (ФИГ. 63-A) хорошо подходит для системы модульного хирургического инструмента 7000 с приводом с электропитанием от литий-ионной или иной батареи, а также от промежуточных шин питания 12В. В одном аспекте синхронный шаговый конвертер пост.ток - пост.ток 7058 поддерживает непрерывный выходной ток 0,5A при выходных напряжениях от 0,9В до 6В (в режиме 100% коэффициента использования).
Также возможно задание последовательности переключения питания путем конфигурирования контактов Enable и Power Good со свободным стоком. В режиме экономии питания синхронный шаговый конвертер пост.ток - пост.ток 7058 (ФИГ. 63-A) демонстрирует ток покоя приблизительно 17 мкА при входном напряжении VIN. Режим экономии энергии включается автоматически и беспрепятственно, если нагрузка низкая, и по всему диапазону нагрузок поддерживается высокая эффективность. В режиме отключения синхронный шаговый конвертер пост.ток - пост.ток 7058 выключается, и потребление тока в отключенном состоянии составляет менее 2 μA.
В одном аспекте OLED-интерфейс 7042 представляет собой интерфейс с OLED-дисплеем 7014. OLED-дисплей 7014 содержит органические светодиоды, в которых излучающий электролюминесцентный слой представляет собой пленку из органической композиции, которая изучает свет под действием электрического тока. Этот слой органического полупроводника расположен между двумя электродами, причем, как правило, по меньшей мере один из этих электродов является прозрачным. OLED-дисплей 7014 может включать в себя диоды OLED из двух основных семейств: на основе низкомолекулярных соединений и на основе полимеров. Добавление мобильных ионов к OLED позволяет получить светоизлучающую электрохимическую ячейку (LEC), которая имеет несколько иной режим функционирования. В OLED-дисплее 7014 можно использовать схему адресации либо с пассивной матрицей (PMOLED), либо с активной матрицей. Для диодов OLED с активной матрицей (AMOLED) требуется сборочная плата с тонкопленочными транзисторами для включения и выключения каждого индивидуального пикселя, однако они позволяют получить более высокое разрешение и дисплеи большего размера. В одном варианте OLED-дисплей 7014 работает без подсветки. Следовательно, он может отображать более глубокие уровни черного цвета, и дисплей может быть тоньше и легче, чем жидкокристаллический дисплей (ЖКД), что делает его идеально подходящим для применения в рукояточном участке 7002 модульного хирургического инструмента с приводом 7000.
В одном аспекте процессор 7030 ствола из электрической подсистемы 7008 стволового участка 7004 может быть выполнен в виде сверхмаломощного 16-битного микроконтроллера для смешанных сигналов, такого как сверхмаломощный микроконтроллер MSP430FR5738 производства Texas Instruments. Процессор 7030 ствола представляет собой сверхмаломощный микроконтроллер, состоящий из нескольких устройств, имеющих встроенную ферритовую (FRAM) энергонезависимую память, сверхмаломощный 16-битный ЦП MSP430 и дополнительные периферические устройства, ориентированные на разные сферы применения. Архитектура, FRAM и периферические устройства в сочетании с семью маломощными режимами оптимизированы для достижения увеличения срока службы батареи в сферах портативных устройств и беспроводной связи. FRAM представляет собой новую энергонезависимую память, сочетающую скорость, универсальность и долговечность статической оперативной памяти (SRAM) со стабильностью и надежностью флэш-памяти, все это при низком суммарном потреблении питания. Периферические устройства включают в себя среди других элементов, 10-битный аналого-цифровой преобразователь, 16-канальный компаратор с возможностями генерации опорного напряжения и функциями гистерезиса, три улучшенных последовательных канала с поддержкой протоколов I2C, SPI или UART, внутренний прямой доступ к памяти (DMA), аппаратный умножитель, часы реального времени, пять 16-битных таймеров.
Процессор 7030 ствола включает в себя 16-битную архитектуру RISC, часы с частотой до 24 МГц, работает в широком диапазоне напряжений питания от 2 В до 3,6 В, и оптимизирован для сверхнизкой мощности. Процессор 7030 ствола также включает в себя интеллектуальную цифровую периферию, сверхнизкомощную ферроэлектрическую оперативную память и до 16 кБ энергонезависимой памяти. Встроенный микроконтроллер обеспечивает запись при сверхнизкой мощности, быстрый цикл записи 125 нс на слово, 16 кБ за 1 мс, и включает в себя встроенный модуль кодирования и коррекции ошибок (ECC) и модуль защиты памяти (MPU).
После приведенного описания электрической системы, подсистем и компонентов рукояточного и стволового участков 7002, 7004 модульного хирургического инструмента 7000 с приводом, будут описаны функциональные аспекты системы управления. Соответственно, при работе электрическая подсистема 7006 рукояточного участка 7002 выполнена с возможностью принимать сигналы от переключателя 7044 открытия, переключателя 7046 закрытия и переключателя 7048 пуска, удерживаемых на корпусе рукояточного участка 7002. При приеме сигнала от переключателя 7046 закрытия процессор 7024 рукоятки приводит в действие двигатель 7038, запуская закрывание плеча зажима. После закрытия зажима переключатель 7052 закрытого состояния зажима в концевом эффекторе посылает сигнал процессору 7030 ствола, который передает информацию о состоянии плеча зажима процессору 7024 рукоятки посредством интерфейса 7010 коммуникационных связей и питания.
После зажатия намеченной ткани можно активировать переключатель 7048 пуска для генерации сигнала, принимаемого процессором 7024 рукоятки. В ответ на это процессор 7024 рукоятки активирует передаточную каретку во второе приводное положение так, что активация двигателя 7038 приведет к повороту второго приводного вала, как подробно описано выше применительно к ФИГ. 1–8. После размещения режущего элемента переключатель 7054 состояния начала пуска, расположенный в концевом эффекторе, посылает сигнал, указывающий положение режущего элемента, процессору 7030 ствола, который передает данные о положении обратно процессору 7024 рукоятки через интерфейс 7010 коммуникационных связей и питания.
Активация первого переключателя 7048 снова посылает сигнал процессору 7038 рукоятки, который в ответ активирует вторую приводную систему и пусковую систему в концевом эффекторе для выталкивания режущего ткань элемента и узла клиновидных салазок в дистальном направлении через кассету с хирургическими скобками. Как только режущий ткань элемент и узел клиновидных салазок вытолкнуты в крайние дистальные положения в хирургической кассете со скобками, переключатель 7056 конца пуска посылает сигнал процессору 7030 ствола, который передает информацию о положении процессору 7024 рукоятки через интерфейс 7010. Теперь можно активировать переключатель 7048 пуска для отправки сигнала процессору 7024 рукоятки, который приводит в действие двигатель 7038, вызывая обратный поворот, для возврата пусковой системы в исходное положение.
Активация переключателя 7044 открытия снова посылает сигнал процессору 7024 рукоятки, который приводит в действие двигатель 7038, открывая зажим. После открытия зажима переключатель 7050 открытого состояния зажима в концевом эффекторе посылает сигнал процессору 7030 ствола, который передает информацию о положении зажима процессору 7024 рукоятки. Переключатель 7034 положения зажима и переключатель 7036 пускового положения подают процессору 7024 рукоятки сигналы, указывающие соответствующие положения плеча зажима и режущего элемента.
На ФИГ. 62 представлена таблица 7060, демонстрирующая общее время выполнения рабочего хода и требования по нагрузочному току для различных операций различных валов устройства; В первом столбце 7062 слева перечислены круговые, профилированные и TLC-устройства/стволы. Такие устройства/стволы сравниваются в трех разных операциях закрытия, открытия и пуска, как показано во втором столбце 7064. В третьем столбце 7066 представлено общее время в секундах, необходимое для того, чтобы устройство/ствол, перечисленное в первом столбце 7063, совершило один ход. В четвертом столбце 7068 перечислены требования по нагрузочному току в амперах, чтобы устройства/стволы, перечисленные в первом столбце 7062, выполнили операцию, перечисленную во втором столбце 7064, в течение полного хода, как указано в третьем столбце 7066. Как указано на схеме, закрытие и открытие плеча зажима у каждого из устройств, перечисленных в первом столбце 7062, требует приблизительно одинакового времени. В случае пусковой операции круговое устройство/ствол требует наибольшего нагрузочного тока 15,69 A, а TLC-устройство/ствол требует наименьшего нагрузочного тока 0,69 A.
На ФИГ. 63-A представлена детальная схема электрической системы рукояточного участка 7002 модульного хирургического инструмента 7000 с приводом; Как показано на ФИГ. 63-A, регулятор напряжения 7026 и преобразователь пост.ток - пост.ток 7058 обеспечивают рабочие напряжения для электрической системы. Регулятор напряжения 7026 регулирует напряжение батареи 7040. Процессор 7024 рукоятки принимает входные сигналы от акселерометра 7020. Логическая схема VSS-ON/OFF Logic 7086 обеспечивает входное напряжение на процессоре 7024 рукоятки и входной сигнал VSS на преобразователь пост.ток - пост.ток (DC-DC converter) 7058.
Трехцветный светодиод 7072 электрически соединен с процессором 7024 рукоятки. Процессор 7024 рукоятки подает питание на красный, синий или зеленый светодиод 7072 для обеспечения визуальной обратной связи.
Три датчика Холла 7028 U10, U11, U12 имеют три отдельных выхода U1_Hall1, U1_Hall2, U1_Hall3 датчиков Холла, которые соединяются с процессором 7024 рукоятки, как показано. Выход U1_Hall3 активирует находящийся на плате светодиод 7088. В одном аспекте выходы U1_Hall1, U1_Hall2, U1_Hall3 датчиков Холла и сигнала ANALOG_CLAMP соединяются с процессором 7024 для определения положения плеча зажима и режущего элемента на участке концевого эффектора модульного хирургического инструмента 7000 с приводом или положения других элементов инструмента 7000.
Пользовательский переключатель 7070 представляет собой характерный пример вышеописанного «крючка-тумблера» 110, который установлен с возможностью поворота на участке пистолетной части рукоятки. Пользовательский переключатель 7070 функционирует с возможностью активации первого переключателя 7044 двигателя, функционально соединенного с процессором 7024 рукоятки. Первый переключатель 7044 двигателя может представлять собой нажимной переключатель, приводимый в действие путем поворота пользовательского переключателя 7070 с введением его с ним в контакт. Активация первого переключателя 7044 двигателя приводит к активации двигателя 7038 так, что приводная шестерня поворачивается в первом направлении вращения. Второй переключатель 7046 двигателя также соединен с процессором 7024 рукоятки и установлен с возможностью избирательного контакта с пользовательским переключателем 7070. Активация второго переключателя 7046 двигателя приводит к активации двигателя 7038 так, что приводная шестерня поворачивается во втором направлении. Пусковой переключатель 7048 соединен с процессором 7024 рукоятки. Активация пускового переключателя 7048 приводит к осевому перемещению передаточной каретки и выдвижению режущего элемента, как описано выше.
К процессору 7024 рукоятки также присоединен вход Joint Test Action Group (JTAG) 7074. Вход JTAG 7074 представляет собой соответствующий стандарту IEEE 1149.1 порт тестового доступа и архитектуру периферийного сканирования, разработанную для отладочных портов интегральных схем (ИС). Процессор 7024 рукоятки задействует JTAG 7074 для выполнения отладочных операций, таких как пошаговое выполнение и установка контрольных точек.
Универсальный асинхронный интерфейс (UART) 7076 соединен с процессором 7024 рукоятки. UART 7076 преобразует данные между параллельной и последовательной формами. UART 7076 часто применяют в сочетании с коммуникационными стандартами, такими как EIA, RS-232, RS-422 или RS-485. Слово «универсальный» указывает, что формат данных и скорость передачи можно настраивать. Уровни электрических сигналов и способы (такие как дифференциальная передача и т.п.) обрабатываются схемой формирователя, внешней по отношению к UART 7076. UART 7076 может представлять собой отдельную интегральную схему (или ее часть), применяемую для последовательной коммуникационной связи через последовательный порт процессора 1024 рукоятки. UART 7076 может быть включен в процессор 1024 рукоятки.
Описание остальных функциональных и операционных аспектов электрической подсистемы 7006 рукояточного участка 7002 модульного хирургического инструмента 7000 с приводом будет далее излагаться применительно к ФИГ. 63-B. Как показано, процессор 7024 рукоятки обеспечивает сигнал, активирующий соленоид 7032. Модуль 7078 ствола передает сигналы о положении SHAFT _IDO, SHAFT_ID1, CLAMP_HOME и FIRE_HOME процессору 7024 рукоятки. Модуль положения 7080 шестерен подает сигнал о положении зажима и режущего элемента процессору 7024 рукоятки. Информация о положениях, обеспечиваемая модулем 7078 ствола и модулем 7080 положения шестерен, позволяет процессору 7024 рукоятки должным образом активировать двигатель 7038 при приеме от пользовательского переключателя 7070 сигналов на открытие зажима, закрытие зажима и/или запуск режущего элемента.
Контроллер 7022 двигателя получает команды от процессора 7024 рукоятки и обеспечивает команды МОП-транзисторному драйверу 7084, который активирует трехфазный BLDC-двигатель 7038 (ФИГ. 61). Как описывалось выше, контроллер 7022 BLDC-двигателя должен направлять поворот ротора. Соответственно, контроллер/драйвер 7022 BLDC-двигателя определяет положение/ориентацию ротора относительно катушек статора. Соответственно, роторная часть BLDC-двигателя 7038 выполнена с датчиками Холла 7028, чтобы напрямую измерять положение ротора. Контроллер 7022 BLDC-двигателя имеет 3 двусторонних выхода (т.е. трехфазный выход с регулируемой частотой), которыми управляет логическая схема.
Соответственно, как описано на ФИГ. 61, 63-A, 63-B и 64, система управления двигателем, содержащая контроллер 7022 двигателя, драйвер 7084 двигателя, датчики Холла 7028 для определения положения двигателя в сочетании с модулем 7080 положения шестерней и/или модулем 7078 валов, может быть выполнена с возможностью синхронизации шестерен так, что штырьковые соединители в рукояточном участке легко соединяются с гнездовыми соединителями в стволовом участке хирургических инструментов, описанных в настоящем документе. Хотя в одном случае, например, могут быть предусмотрены определенные допуски для облегчения смещения или шпоночного соединения, система управления двигателем выполнена с возможностью отслеживания положения шестерней, чтобы не допустить остановки шестерен в таком положении, которое не позволит сдвинуть друг относительно друга или установить два поворотных шпоночных соединения. В другом случае двигатель может быть выполнен с возможностью медленного дискретного поворота в процессе установки или сдвига для устранения любых небольших проблем рассинхронизации. Те же самые проблемы могут возникнуть в примере, описанном применительно к ФИГ. 6, когда инструмент сдвигается между двумя приводами, а не только при установке новых концевых эффекторов. Такую ситуацию можно разрешить путем надлежащей синхронизации шестерен с использованием системы управления двигателем, описанной применительно к ФИГ. 61, 63-A, 63-B и 64. В других случаях могут использоваться преобразователи, отслеживающие повороты шестерен/стволов.
На ФИГ. 64 представлена блок-схема электрической системы рукояточного и стволового участков модульного хирургического инструмента с приводом. Как показано на ФИГ. 64, процессор 7024 рукоятки получает входные сигналы от переключателя 7044 открытия, переключателя 7046 закрытия, пускового переключателя 7048, переключателя 7034 положения зажима и переключателя 7036 пускового положения. Кроме того, процессор 7024 рукоятки принимает входные сигналы от переключателя 7090 исходного положения зажима и переключателя 7092 исходного пускового положения из модуля 7078 стволов. На основе различных комбинаций входных сигналов переключателей процессор 7024 рукоятки обеспечивает надлежащие команды двигателю 7038 и соленоиду 7032. Схема 7088 мониторинга батареи отслеживает входное электропитание процессора 7024 рукоятки относительно земли. Процессор 7024 рукоятки управляет трехцветным светодиодом 7072. Акселерометр 7020 подает входные сигналы ориентации по трем осям процессору 7024 рукоятки для определения различных параметров, таких как ориентация инструмента 7000 и того, не роняли ли инструмент 7000. Регулятор напряжения 7026 обеспечивает регулируемую подачу электропитания в систему. Модуль 7094 определения тока предназначен для анализа тока, проходящего от блока питания.
На ФИГ. 65 показана механическая переключательная система управления перемещениями 7095 для избавления от микропроцессорного управления функциями двигателя; В системе, описанной применительно к ФИГ. 61–64, для управления работой двигателя 7038 используется микропроцессор, такой как процессор 7024 рукоятки. Процессор 7024 рукоятки исполняет управляющий алгоритм на основе различных состояний переключателей, установленных в инструменте 7000. Это требует применения процессора 7024 рукоятки и соответствующих идентификационных функций для обеспечения управления разными концевыми эффекторами.
Однако, как показано на ФИГ. 65, для управления двигателем 7038 можно применять альтернативную методику, которая устраняет необходимость в процессоре 7024 рукоятки путем помещения связанных с перемещениями переключателей 7096A, 7096B, 7096C, 7096D в ствол концевого эффектора. Переключатели 7096A-D в этом случае выполнены с возможностью включения и отключения определенных функций двигателя 7038 или изменения направления вращения двигателя 7038 в зависимости от того, где находятся определенные компоненты концевого эффектора. В одном варианте переключатель, который указывает на полное выдвижение режущего элемента, можно использовать для переключения функций двигателя 7038 с целью изменения направления вращения и отведения режущего элемента. В другом варианте переключатели 7096A-D могут быть выполнены с возможностью обнаружения давления или силы так, что простое закрытие упора на ткани подавало бы сигнал включающий/выключающий сигнал на закрывающий двигатель 7038, останавливая закрывающее перемещение.
В различных вариантах хирургический инструмент может включать в себя рукоятку, электродвигатель, расположенный внутри рукоятки, ствол, выполненный с возможностью прикрепления к рукоятке, и концевой эффектор, проходящий от ствола, причем электродвигатель выполнен с возможностью обуславливания функции концевого эффектора на концевом эффекторе. В некоторых вариантах хирургический инструмент может включать в себя систему управления, содержащую один или более датчиков, и микропроцессор, который может принимать входные сигналы от датчиков, отслеживать работу хирургического инструмента и приводить в действие электродвигатель для выполнения функций концевого эффектора на основании входных сигналов от датчиков. По меньшей мере в одном таком варианте осуществления рукоятка хирургического инструмента может использоваться более чем с одним стволом. Например, на рукоятке могут быть собраны ствол для линейного сшивания или ствол для кругового сшивания. Рукоятка может включать в себя по меньшей мере один датчик, выполненный с возможностью обнаружения типа ствола, собранного на ней, и передачи этой информации микропроцессору. Микропроцессор может отличным образом приводить в действие электродвигатель в ответ на входящие сигналы от датчиков, в зависимости от типа ствола, собранного на рукоятке. Например, если электродвигатель выполнен с возможностью приводить в действие закрывающую систему концевого эффектора, микропроцессор будет поворачивать электродвигатель в первом направлении, чтобы закрыть упор ствола кругового сшивающего инструмента, и во втором, или противоположном направлении, чтобы закрыть упор ствола линейного сшивающего инструмента. Предусмотрены другие системы управления, в которых аналогичное функциональное управление электродвигателем может достигаться без применения микропроцессора. По меньшей мере в одном таком варианте стволы и/или рукоятка хирургического инструмента могут включать в себя переключатели, которые могут по-разному приводит в действие хирургический инструмент, в зависимости от типа ствола, собранного на рукоятке.
В различных вариантах система хирургического инструмента может включать в себя источник питания, первый двигатель, выполненный с возможностью осуществления первой функции концевого эффектора, второй двигатель, выполненный с возможностью осуществления второй функции концевого эффектора, и управляющую систему переключателей, выполненную с возможностью избирательного соединения источника питания с первым двигателем и вторым двигателем под действием управляющей системы переключателей. В различных вариантах такая система хирургического инструмента может не включать в себя микропроцессор. Первый двигатель может представлять собой закрывающий двигатель закрывающей системы, выполненный с возможностью закрытия упора концевого эффектора, а второй двигатель может представлять собой пусковой двигатель из пусковой системы, выполненный с возможностью выпускания скоб из кассеты со скобками концевого эффектора. Управляющая система переключателей может включать в себя переключатель закрывающего спускового механизма, который при закрытии может закрывать закрывающую питающую схему, которая соединяет источник питания с закрывающим двигателем. Управляющая система может дополнительно включать в себя переключатель конца хода закрывания, который может открываться закрывающей системой, когда упор находится в полностью закрытом положении, и открывать закрывающую схему питания, останавливая закрывающий двигатель и закрывающий привод. Управляющая система переключателей может также включать в себя переключатель пускового крючка, который может быть частью пусковой схемы питания, соединяющей источник питания с пусковым двигателем. В различных ситуациях пусковая схема питания по умолчанию может быть разомкнута, что может предотвращать приведение в действие пускового двигателя, прежде чем будет замкнута пусковая схема питания. Следовательно, одно замыкание пускового крючка не может замкнуть пусковую питающую схему и привести в действие пусковой двигатель. Пусковая схема питания дополнительно может включать в себя второй переключатель конца закрывающего хода, который может замыкаться закрывающей системой, когда упор находится в полностью закрытом положении. Замыкание пускового переключателя и второго переключателя конца закрывающего хода могут замкнуть пусковую питающую схему и привести в действие пусковой двигатель. Управляющая схема может дополнительно включать в себя переключатель конца пускового хода, который может размыкаться пусковым приводом, когда пусковой привод достигает конца пускового хода. Размыкание переключателя конца пускового хода может размыкать пусковую питающую схему и останавливать пусковой двигатель. Управляющая система может дополнительно включать в себя второй переключатель конца пускового хода, который может замыкаться пусковым приводом и замыкать реверсивную пусковую питающую схему, которая обращает полярность питания, прилагаемого к пусковому двигателю, и приводит в действие пусковой двигатель в противоположном направлении и оттягивает пусковой привод. Для замыкания реверсивной пусковой схемы питания также может требоваться, чтобы переключатель пускового крючка находился в закрытом положении. Когда пусковой привод достигает полностью оттянутого положения, он может замыкать проксимальный пусковой переключатель. Замыкание проксимального пускового переключателя может замыкать реверсивную закрывающую схему питания, которая может обращать полярность питания, прилагаемого к закрывающему двигателю, и приводит в действие закрывающий двигатель в противоположном направлении, открывая упор. Для замыкания реверсивной закрывающей схемы питания также может требоваться, чтобы переключатель закрывающего крючка находился в закрытом положении. Когда упор достигает полностью открытого положения, упор может размыкать проксимальный закрывающий переключатель, который может размыкать реверсивную закрывающую схему питания и останавливать закрывающий двигатель. Это лишь один пример.
В различных вариантах, как описано в настоящем документе, рукоятка хирургического инструмента может использоваться с несколькими разными узлами стволов, которые можно избирательно прикреплять к рукоятке. В некоторых вариантах, что также описано в настоящем документе, рукоятка может быть выполнена с возможностью обнаружения типа ствола, собранного на рукоятке, и работа рукоятки может определяться управляющей схемой, содержащейся внутри рукоятки. Например, рукоятка может включать в себя микропроцессор и по меньшей мере один модуль памяти, в котором могут храниться и выполняться множество рабочих программ, каждая из которых выполнена с возможностью приведения в действие определенного узла ствола. Предусмотрены другие варианты осуществления, в которых рукоятка не включает в себя системы управления; вместо этого каждый узел ствола может содержать собственную систему управления. Например, первый узел ствола может содержать первую систему управления, второй узел ствола может содержать вторую систему управления, и так далее. В различных вариантах рукоятка может содержать электродвигатель, источник питания, такой как батарея и/или входной кабель и, например, электрическую схему, выполненную с возможностью приведения в действие электрического двигателя на основе управляющих входных сигналов от прикрепленного узла ствола. Рукоятка может дополнительно содержать исполнительный механизм, который в сочетании с системой управления ствола может управлять электродвигателем. В различных вариантах рукоятка может не содержать дополнительных управляющих логических схем и/или микропроцессора, например, для управления электродвигателем. За исключением рукояточного исполнительного механизма, система управления в узле ствола, прикрепленном к рукоятке, может включать в себя управляющую логику, необходимую для приведения в действие электрического двигателя. В различных вариантах управляющая система узла ствола может включать в себя микропроцессор, тогда как в других вариантах она может не содержать его. В некоторых вариантах первая управляющая система первого узла ствола может включать в себя первый микропроцессор, вторая управляющая система второго узла ствола может включать в себя второй микропроцессор и т.д. В различных вариантах рукоятка может включать в себя первый электродвигатель, такой как закрывающий двигатель, и второй электродвигатель, такой как пусковой двигатель, причем управляющая система в прикрепленном узле ствола может приводить в действие закрывающий двигатель и пусковой двигатель. В некоторых вариантах рукоятка может содержать закрывающий исполнительный механизм и пусковой исполнительный механизм. За исключением закрывающего исполнительного механизма и пускового исполнительного механизма, система управления в узле ствола, прикрепленном к рукоятке, может включать в себя управляющую логику, необходимую для приведения в действие закрывающего двигателя и пускового двигателя. В различных вариантах рукоятка может включать в себя интерфейс ствола, а каждый узел ствола может включать в себя интерфейс рукоятки, выполненный с возможностью взаимодействия с интерфейсом ствола. Интерфейс ствола может включать в себя электрический разъем, выполненный с возможностью взаимодействия с электрическим разъемом интерфейса рукоятки, когда узел ствола собирается на рукоятке. По меньшей мере в одном варианте осуществления каждый разъем может содержать только один электрический контакт, и при сопряжении образуется только один канал управления между рукояткой и узлом ствола. В других вариантах каждый разъем может содержать два электрических контакта, которые формируют две сопряженные пары при прикреплении узла ствола к рукоятке. В таких вариантах могут присутствовать только двух каналов управления между рукояткой и узлом ствола. Предусмотрены и другие варианты осуществления, в которых между рукояткой и узлом ствола присутствует более двух каналов управления.
В различных вариантах прикрепляемые хирургические концевые эффекторы могут быть совместимы с рукояткой хирургического инструмента. Например, хирургический концевой эффектор может присоединяться к рукоятке хирургического инструмента и может подавать и/или реализовывать приводное перемещение, инициированное в рукоятке хирургического инструмента. Как показано на ФИГ. 73 и 74, хирургический концевой эффектор 8010 может представлять собой один из нескольких хирургических концевых эффекторов, которые могут быть совместимы с рукояткой 8000 хирургического инструмента. Разнообразные другие хирургические концевые эффекторы описаны в тексте настоящего описания и представлены на соответствующих чертежах. Читателю следует понимать, что эти разнообразные, различающиеся хирургические концевые эффекторы, описанные и представленные в настоящем документе, могут быть совместимы, например, с одной и той же рукояткой хирургического инструмента и/или могут быть совместимы с более чем одним типом рукояток хирургических инструментов.
Рукоятка 8000 может включать в себя приводные системы, которые, например, могут быть выполнены с возможностью передачи приводного перемещения от рукоятки 8000 хирургического инструмента к компоненту, узлу и/или системе концевого эффектора 8010. Например, рукоятка 8000 может включать в себя первую приводную систему 8002a и вторую приводную систему 8004a. В некоторых вариантах одна из приводных систем 8002a, 8004a может быть выполнена, например, с возможностью подачи закрывающего приводного перемещения к узлу браншей концевого эффектора 8010 (ФИГ. 73), а одна из приводных систем 8002a, 8004a может быть выполнена, например, с возможностью подачи пускового приводного перемещения на пусковой элемент в концевом эффекторе 8010. Приводные системы 8002a, 8004a могут быть выполнены с возможностью передачи линейного перемещения, смещения и/или поступательного перемещения от рукоятки 8000 к концевому эффектору 8010. В различных вариантах первая приводная система 8002a может включать в себя приводную штангу 8006, которая может быть выполнена с возможностью поступательного перемещения и/или линейного смещения после активации первой приводной системы 8002a. Аналогично, вторая приводная система 8004a может включать в себя приводную штангу 8008, которая может быть выполнена с возможностью поступательного перемещения и/или линейного смещения после активации второй приводной системы 8004a.
В различных вариантах узел концевого эффектора 8010 может включать в себя первую приводную систему 8002b, которая может соответствовать, например, первой приводной системе 8002a рукоятки 8000, и также может включать в себя вторую приводную систему 8004b, которая может соответствовать, например, второй приводной системе 8004a рукоятки 8000. В различных вариантах первая приводная система 8002b в концевом эффекторе 8010 может включать в себя приводной элемент 8012, который может быть функционально и с возможностью высвобождения соединен, например, с приводной штангой 8006 первой приводной системы 8002a рукоятки 8000, и может быть, например, выполнен с возможностью принимать линейное перемещение от приводной штанги 8006. Кроме того, вторая приводная система 8004b в концевом эффекторе 8010 может включать в себя приводной элемент 8014, который может быть функционально и с возможностью высвобождения соединен, например, с приводной штангой 8008 второй приводной системы 8004a рукоятки 8000, и может быть, например, выполнен с возможностью принимать линейное перемещение от приводной штанги 8008.
В различных вариантах рукоятка 8000 и/или концевой эффектор 8010 могут включать в себя соединительную конструкцию, выполненную с возможностью осуществления разъемного соединения, например, приводной штанги 8006 с приводным элементом 8012, и/или, например, приводной штанги 8008 с приводным элементом 8014. Иными словами, соединительная конструкция может соединять первую приводную систему 8002a рукоятки 8000 с первой приводной системой 8002b концевого эффектора 8010 и вторую приводную систему 8004a рукоятки 8000 со второй приводной системой 8004b концевого эффектора 8010, так что приводное усилие, инициированное в рукоятке 8000 хирургического инструмента, может передавать к соответствующей приводной системе 8002b, 8004b прикрепленного хирургического концевого эффектора 8010. Хотя хирургическая система, представленная на ФИГ. 73 и 74, включает в себя пару приводных систем 8002a, 8004a в рукоятке 8000 и соответствующую пару приводных систем 8002b, 8004b в концевом эффекторе 8010, читателю следует понимать, что различные соединительные конструкции, описанные в настоящем документе, также можно использовать в хирургическом концевом эффекторе и/или рукоятке, содержащей, например, одну приводную систему или более двух приводных систем.
В различных вариантах соединительная конструкция для прикрепления приводной системы в рукоятке хирургического инструмента к приводной системе в прикрепленном концевом эффекторе может включать в себя фиксатор, который может быть выполнен с возможностью удерживания и закрепления соединения между соответствующими приводными системами рукоятки и концевого эффектора. Как описано в настоящем документе более подробно, фиксатор может быть подпружиненным и может быть соединен, например, со спусковым механизмом, выполненным с возможностью функционального преодоления смещения пружины, например, для разблокировки, открытия и/или высвобождения соединительной конструкции. В различных вариантах соединительная конструкция может включать в себя независимые и/или отдельные соединительные механизмы и/или сочленения для каждой приводной системы 8002b, 8004b в хирургическом концевом эффекторе 8010. В таких вариантах одну из приводных систем 8002b, 8004b можно активировать без активации другой приводной системы 8002b, 8004b. В других вариантах приводные системы 8002b, 8004b можно активировать, например, одновременно и/или параллельно.
На ФИГ. 66–72 представлена соединительная конструкция 8100 для применения в хирургическом концевом эффекторе. Например, хирургический концевой эффектор может быть прикреплен к рукоятке 8170 (ФИГ. 67-69) хирургического инструмента, посредством соединительной конструкции 8100. В различных вариантах соединительная конструкция 8100 может включать в себя корпус или раму 8102 соединителя. Корпус 8102 соединителя может располагаться, например, внутри проксимального крепежного участка концевого эффектора. Кроме того, корпус 8102 соединителя может включать в себя, например, каретку 8104, которая может быть выполнена с возможностью перемещения, например, относительно корпуса 8102 соединителя. Например, корпус 8102 соединителя может включать в себя канал 8103, размер и конструкция которого подходят для приема в нем каретки 8104 с возможностью скольжения и/или сдвига. Например, каретка 8104 может быть заключена в корпус 8102 соединителя так, что каретка 8104 удерживается с возможностью перемещения в канале 8103 и может перемещаться и/или скользить внутри канала 8103. Канал 8103 может, например, направлять и/или ограничивать перемещение каретки 8014 относительно корпуса 8102. В некоторых вариантах каретка 8104 может иметь наклонную поверхность, такую как уклон или клин 8106, который может дополнительно, например, направлять и/или способствовать перемещению каретки 8104.
В различных вариантах соединительная конструкция 8100 может включать в себя спусковой механизм 8120, находящийся в скользящем взаимодействии с уклоном 8106 каретки 8104. Например, спусковой механизм 8120 может включать в себя наклонную поверхность 8122, выполненную с возможностью скольжения вдоль уклона 8106 каретки 8104 при перемещении спускового механизма 8120, например, между первым, или неактивированным положением (ФИГ. 68) и вторым, или активированным, положением (ФИГ. 67 и 69). В некоторых вариантах соединительная конструкция 8100 может включать в себя направляющую, такую как направляющие шины 8110, которые могут быть расположены и иметь конструкцию, подходящую для направления спускового механизма 8120, например, между первым, неактивированным положением и вторым, активированным положением. Например, корпус 8102 соединителя может включать в себя пару направляющих шин 8110, которые могут образовывать активационную траекторию для спускового механизма 8120.
В различных вариантах, когда спусковой механизм 8120 перемещается по активационной траектории, образованной по меньшей мере одной направляющей шиной 8110 в направлении D1 (ФИГ. 67 и 69) из неактивированного положения (ФИГ. 68) в активированное положение (ФИГ. 67 и 69), например, каретка 8104 может сдвигаться вниз или в направлении D3 (ФИГ. 67 и 69) внутри канала 8103 посредством наклонной поверхности 8122 спускового механизма 8120 и уклона 8106 каретки 8104. Соответственно, активация спускового механизма 8120 может сдвигать каретку 8104, например, относительно корпуса 8102 соединителя, спускового механизма 8120 и/или различных других компонентов, узлов и/или систем соединительной конструкции 8100.
В различных вариантах при перемещении спускового механизма 8120 вдоль по меньшей мере одной направляющей шины 8110 в направлении D2 (ФИГ. 68) из активированного положения (ФИГ. 67 и 69) в неактивированное положение (ФИГ. 68), например, каретка 8104 может сдвигаться вверх или в направлении D4 (ФИГ. 68) внутри канала 8103 посредством наклонной поверхности 8122 спускового механизма 8120 и уклона 8106 каретки 8104. Соответственно, активация спускового механизма 8120 может влиять на перемещение каретки 8104, например, относительно корпуса 8102 соединителя. В некоторых вариантах пружина и/или иной смещающий механизм может быть выполнен с возможностью смещения каретки 8104 и/или спускового механизма 8120 к заданному положению, например, относительно канала 8103 и/или корпуса 8102 соединителя.
Как показано на ФИГ. 66, в различных вариантах в корпусе 8102 соединителя и/или концевом эффекторе может быть образован паз 8112. Размер паза 8112 может быть пригоден для приема в нем, например, приводного элемента 8172 рукоятки 8170 хирургического инструмента. В некоторых вариантах в корпусе 8102 соединителя может быть выполнена пара пазов 8112, и каждый паз 8112 может быть выполнена, например, с возможностью принимать в нем один из приводных элементов 8172 рукоятки 8170. Как описано в настоящем документе более подробно, приводные элементы 8172 могут быть соединены и/или иным образом приводимы в движение приводной системой в рукоятке 8170. Например, каждый приводной элемент 8172 может иметь соединение и/или иным образом приводиться в движение линейным исполнительным механизмом приводной системы в рукоятке 8170, которая может быть выполнена с возможностью поступательного перемещения и подачи линейного приводного движения на соответствующую приводную систему в концевом эффекторе.
В различных вариантах каретка 8104 также может быть выполнена с возможностью перемещения и/или сдвига относительно гнезда 8130 приводного элемента соединительной конструкции 8100. Гнездо 8130 приводного элемента может быть выполнено с возможностью принимать, например, один из приводных элементов 8172 рукоятки 8170. Как показано главным образом на ФИГ. 71, гнездо 8103 может включать в себя отверстие 8136, размер и/или конструкция которого подходят для приема в нем компонента приводной системы рукоятки 8170. Например, как показано главным образом на ФИГ. 67, отверстие 8136 может быть выполнено с возможностью принимать в нем дистальный участок приводной штанги 8172. В таких вариантах, когда приводная штанга 8172 закреплена внутри отверстия 8136 в гнезде 8130, как описано в настоящем документе более подробно, гнездо 8130 может иметь возможность передачи приводной силы от рукоятки 8170 к хирургическому концевому эффектору, например, посредством взаимодействия приводной штанги 8172 и гнезда 8130.
Как показано на ФИГ. 67, приводная штанга 8172 может, например, включать в себя фаску 8176 и желоб или углубление 8174, которые могут способствовать взаимодействию и/или блокировке приводной штанги 8172 в гнезде 8130. В различных вариантах гнездо приводного элемента 8130 может быть закреплено и/или зафиксировано, например, внутри концевого эффектора и/или внутри корпуса 8102 соединителя, и каретка 8104 может быть выполнена с возможностью перемещения и/или сдвига относительно и/или в области гнезда 8130 при скольжении каретки 8104 внутри канала 8103 корпуса 8102 соединителя.
Как показано главным образом на ФИГ. 71, гнездо 8130 может включать в себя по меньшей мере один гибкий язычок 8132a, 8132b. Гибкий язычок 8132a, 8132b может смещаться внутрь к отверстию 8136 и/или может включать в себя, например, смещающийся внутрь зубец. В некоторых вариантах гибкий язычок 8132a, 8132b может включать в себя, например, зубец 8133, выполненный с возможностью взаимодействия с желобом 8174 в приводной штанге 8172, когда приводная штанга 8172 вставляется в отверстие 8136 гнезда 8130. Например, фаска 8176 приводной штанги 8172 может проходить мимо зубца 8133 внутри отверстия 8136 гнезда и может разгибать или отклонять язычок 8132 наружу от отверстия 8136. По мере того, как приводная штанга 8172 продолжает входить в отверстие 8136 гнезда 8130, зубец 8136 язычка 8132a, 8132b может входить во взаимодействие или захватывать желоб 8174 в приводной штанге 8172. В таких вариантах взаимодействие зубца 8136 и желоба 8174 позволяет, например, удерживать с возможностью высвобождения приводную штангу 8172 внутри гнезда 8130.
В различных вариантах гнездо 8130 может включать в себя выемку 8134, выполненную с возможностью введения в нее, например, пружины 8150. В других вариантах гнездо 8136 может включать в себя несколько углублений 8134, и соединительная конструкция 8100 может включать в себя, например, более чем одну пружину 8150. Более того, в некоторых вариантах гнездо 8130 может включать в себя более одного гибкого язычка 8132a, 8132b. Например, гнездо 8130 может включать в себя пару латерально расположенных язычков 8132a, 8132b. Первый язычок 8132a может быть расположен, например, на первой боковой стороне гнезда 8130, а второй язычок 8132b может быть расположен, например, на второй боковой стороне гнезда 8130. В некоторых вариантах язычки 8132a, 8132b могут, например, отклоняться наружу от отверстия 8136 для обеспечения входа приводной штанги 8172. В других вариантах гнездо 8130 может, например, не включать в себя отклоняющегося внутрь язычка и/или может включать в себя более двух язычков.
В различных вариантах соединительная конструкция 8100 также может включать в себя фиксатор или гильзу 8140, который может быть расположен с возможностью перемещения относительно гнезда 8130. Например, фиксатор 8140 может включать в себя отверстие 8142 (ФИГ. 72), размер и конструкция которого подходят для по меньшей мере частичного заключения в себе по меньшей мере участка гнезда 8130. Например, фиксатор 8140 может располагаться вокруг гнезда 8130 и может располагаться, например, с возможностью перемещения относительно язычков 8132a, 8132b гнезда 8130. В различных вариантах пружина 8150 может находиться, например, между участком гнезда 8130 и участком фиксатора 8140, так что пружина 8150 может смещать фиксатор 8140 к фиксирующему гнездо положению (ФИГ. 68). Например, пружина 8150 может смещать фиксатор 8140 в фиксирующее гнездо положение (ФИГ. 68), в котором фиксатор 8140 располагается так, что окружает и/или ограничивает отгибание язычка(ов) 8132a, 8132b наружу.
В различных вариантах, когда фиксатор 8140 расположен так, что ограничивает и/или предотвращает отгибание наружу язычка(ов) 8132a, 8132b, т.е. в фиксирующем гнездо положении, смещение язычка(ов) 8132a, 8132b наружу от отверстия 8136 может быть ограничено так, что язычок(и) 8132a, 8132b, например, могут блокировать и/или иным образом предотвращать вход и/или высвобождение приводной штанги 8172 относительно отверстия 8136 в гнезде 8130. Кроме того, когда спусковой механизм 8120 перемещается из неактивированного положения (ФИГ. 68) в активированное положение (ФИГ. 67 и 69), фиксатор 8140 может, например, преодолеть смещающее действие пружины 8150 и может переместиться из фиксирующего гнездо положения (ФИГ. 68) в нефиксированное положение (ФИГ. 67 и 69). В нефиксированном положении фиксатор 8140 можно сдвинуть от гибкого язычка(ов) 8132a, 8132b так, что гибкий язычок(и) 8132a, 8132b, например, можно будет отогнуть наружу и гнездо 8130, например, может принять приводную штангу 8172.
В различных вариантах фиксатор 8140 может содержать утолщение или выступ 8144. Кроме того, как показано главным образом на ФИГ. 70, каретка 8104 в корпусе 8102 соединителя может включать в себя смещающий элемент 8108. Смещающий элемент 8108 может включать в себя, например, уклон или наклонную поверхность, которая может быть выполнена с возможностью перемещения выступа 8144 и, следовательно, фиксатора 8140, например, между первым или фиксирующим гнездо положением (ФИГ. 67 и 69) и вторым или нефиксированным положением (ФИГ. 68). Например, когда перемещение спускового механизма 8120 заставляет каретку 8104 двигаться относительно корпуса 8102 соединителя и гнезда 8130, как описано в настоящем документе, выступ 8144 может скользить по наклонной поверхности смещающего элемента 8108 так, что фиксатор 8140 будет перемещаться относительно гибкого язычка 8132 гнезда 8130. В таких вариантах активация спускового механизма 8120 позволяет преодолеть смещающее действие пружины 8150 и оттянуть фиксатор 8140 из фиксирующего гнездо положения вокруг гибкого язычка(ов) 8132 гнезда 8130 в нефиксированное положение. В таких вариантах при оттягивании фиксатора 8140 гибкий язычок(и) 8132 может получить возможность отогнуться и/или взаимодействовать с приводной штангой 8172. Кроме этого, когда спусковой механизм не активирован, пружина 8150 может смещать фиксатор 8140 в положение относительно и/или в области гибкого язычка(ов) 8132a, 8132b так, что отгибание язычка(ов) 8132a, 8132b и, следовательно, взаимодействие с приводной штангой 8172, например, ограничивается или предотвращается.
В некоторых вариантах фиксатор 8140 может включать в себя пару латерально противоположных выступов 8144, которые могут находиться в скользящем взаимодействии с латерально противоположными смещающими элементами 8108 каретки 8104. Кроме того, в тех случаях, в которых соединительная конструкция 8100 соединяет более одной приводной системы между рукояткой 8170 и хирургическим концевым эффектором, например, каретка 8104 может включать в себя множество смещающих элементов 8108 и/или множество пар смещающих элементов 8108. Например, каждое гнездо 8130 может включать в себя пару латерально расположенных выступов 8144, а каретка 8104 может включать в себя, например, по смещающему элементу 8108 на каждый выступ 8144.
Как показано главным образом на ФИГ. 68, перед активацией спускового механизма 8120 и/или после высвобождения спускового механизма 8120, спусковой механизм 8120 может располагаться в дистальном, неактивированном положении, каретка 8104 может располагаться в поднятом положении относительно корпуса 8102 соединителя, а фиксатор 8140 может располагаться в фиксирующем гнездо положении. В такой конфигурации фиксатор 8140 может, например, предотвращать вход и/или взаимодействие приводной штанги 8172 с гнездом 8130. В различных вариантах пружина(ы) 8150 и/или иной пружинный и/или смещающий элемент может, например, смещать спусковой механизм 8120 в неактивированное положение, каретку 8104 - в поднятое положение и/или фиксатор 8140 - в фиксирующее гнездо положение. Для соединения и/или прикрепления одной из приводных штанг 8172 к одному из гнезд 8130, как показано на ФИГ. 67, спусковой механизм 8120 можно перевести в проксимальное, активированное положение, что позволяет, например, сместить каретку 8104 в опущенное положение, что может сдвигать фиксатор 8140 в нефиксированное положение. В такой конфигурации приводная штанга 8172, например, может быть выполнена с возможностью входить в гнездо 8130 или принимать ее в нем.
Далее, если высвободить спусковой механизм 8120, как показано на ФИГ. 68, например, пружина(ы) 8150 может(ут) сместить спусковой механизм 8120 обратно в дистальное, неактивированное положение, может(ут) сместить каретку 8104 обратно в поднятое положение и может(ут) сместить фиксатор 8140 обратно в фиксирующее гнездо положение. Соответственно, приводной элемент 8172 может быть заблокирован во взаимодействии с гнездом 8130, поскольку фиксатор 8140 может предотвращать отгибание наружу гибких язычков 8132a, 8132b и, следовательно, может, например, закрепить приводной элемент 8172 внутри гнезда 8130. Соответственно, как показано на ФИГ. 69, для отсоединения приводного элемента 8172 от гнезда 8130, спусковой механизм 8120 можно снова переместить в проксимальное, активированное положение, что может, например, сдвинуть каретку 8104 в опущенное положение, что может сдвинуть фиксатор 8140 в нефиксированное положение. В такой конфигурации, т.е. когда гнездо 8130 не зафиксировано, приводной элемент 8172, например, можно удалить из гнезда 8130.
В различных вариантах хирургический инструмент может включать в себя приводную систему, соединенную с двигателем. В некоторых вариантах двигатель и приводная система могут влиять на различные хирургические функции. Например, двигатель и приводная система, например, могут влиять на открытие и/или закрытие хирургического концевого эффектора и могут влиять на разрезающий и/или пусковой ход. В некоторых вариантах двигатель и приводная система могут влиять на множество отдельных хирургических функций. Например, открытие и закрытие хирургического концевого эффектора могут быть разделены и отличны от разрезания и/или выпуска крепежных элементов из хирургического концевого эффектора. В таких вариантах приводная система может включать в себя узел трансмиссии и/или захвата, который, например, может сдвигать приводную систему для взаимодействия с разными выходными системами.
В различных вариантах хирургический инструмент может включать в себя приводную систему, содержащую множество выходных стволов, и сцепление для переключения между разными выходными стволами. В некоторых вариантах выходные стволы могут соответствовать разным хирургическим функциям. Например, первый выходной ствол может соответствовать перемещению закрытия концевого эффектора, а второй выходной ствол может соответствовать пусковому перемещению концевого эффектора. В различных вариантах приводная система может переключаться, например, между соединением с первым выходным стволом и вторым выходным стволом так, что хирургические функции являются разделенными, отличающимися и/или независимыми. Например, перемещение закрытия концевого эффектора может быть отделено и отлично от пускового перемещения концевого эффектора. Например, может быть предпочтительным начинать закрывающее перемещение, а по завершению закрывающего перемещения начинать отдельное пусковое перемещение. Более того, может быть предпочтительно управлять и/или осуществлять независимые закрывающее перемещение и пусковое перемещение посредством одной приводной системы, которая может быть соединена, например, с одним электродвигателем. В других вариантах первый выходной вал и второй выходной вал могут быть функционально соединены, и различные хирургические функции и/или перемещения могут происходить, например, одновременно и/или по меньшей мере частично одновременно.
Как показано на ФИГ. 75–78, рукоятка 8600 хирургического инструмента может включать в себя приводную систему 8602, которая может включать в себя, например, первую выходную приводную систему 8610 и вторую выходную приводную систему 8620. В различных вариантах, при прикреплении концевого эффектора к рукоятке 8600 первая выходная приводная система 8610 может соединяться с первой приводной системой в прикрепленном концевом эффекторе, а вторая выходная приводная система 8620 может соединяться со второй приводной системой в прикрепленном концевом эффекторе. Первая выходная приводная система 8610 может влиять на первую хирургическую функцию, такую как сжатие бранш концевого эффектора, а вторая выходная приводная система 8620 может влиять на вторую хирургическую функцию, такую как запуск перемещения пускового элемента по концевому эффектору. В других вариантах хирургические функции, относящиеся к первой выходной приводной системе 8610 и второй выходной приводной системе 8620, могут, например, изменяться на обратную и/или меняться иным образом.
В различных вариантах приводная система 8602 может включать в себя узел двигателя, который может включать в себя электродвигатель 8640 и ствол 8642 двигателя. Приводная шестерня 8644 может быть установлена, например, на стволе 8642 двигателя, так что электродвигатель 8640 осуществляет и/или влияет на поворот приводной шестерни 8644. В различных вариантах первая выходная приводная система 8610 может включать в себя первый приводной вал 8612 и первую ведомую шестерню 8612. Первая ведомая шестерня 8614 может быть установлена на первом приводном валу 8612, например, так, что поворот первой ведомой шестерни 8614 влияет на вращение первого приводного вала 8612. В различных вариантах, линейный исполнительный механизм 8616 может быть расположен при помощи резьбы на первом приводном валу 8612, и поворот первого приводного вала 8612 может влиять, например, на линейное перемещение линейного исполнительного механизма 8616. Более того, в различных вариантах вторая выходная приводная система 8620 может включать в себя второй приводной вал 8622 и вторую ведомую шестерню 8624. Вторая ведомая шестерня 8624 может быть установлена на втором приводном валу 8622, например, так, что поворот второй ведомой шестерни 8624 влияет на вращение второго приводного вала 8622. В различных вариантах, линейный исполнительный механизм 8626 может быть расположен при помощи резьбы на втором приводном валу 8624, и поворот второго приводного вала 8624 может влиять, например, на линейное смещение линейного исполнительного механизм 8626.
В различных вариантах приводная система 8602 может дополнительно содержать узел 8648 трансмиссии или сдвигателя. Узел 8648 сдвигателя может быть выполнен с возможностью сдвигать взаимодействие приводной шестерни 8644, например, между первой выходной приводной системой 8610 и второй выходной приводной системой 8620. В некоторых вариантах узел сдвигателя 8648 может включать в себя сдвигающую шестерню 8652, которая может, например, находиться в зубчатом взаимодействии с приводной шестерней 8644. Кроме этого, сдвигающая шестерня 8652 может быть выполнена, например, с возможностью сдвигания или перемещения в пределах диапазона положений, и она может оставаться в зубчатом взаимодействии с приводной шестерней 8644 при перемещении сдвигающей шестерни 8652 в пределах этого диапазона положений.
Например, сдвигающая шестерня 8652 может входить во взаимодействие и/или выходить из взаимодействия с по меньшей мере одной из первой ведомой шестерни 8614 и/или второй ведомой шестерни 8624. В различных вариантах сдвигающая шестерня 8652 может входить в зубчатое взаимодействие со второй приводной шестерней 8624 второй выходной приводной системы 8620. Например, в первом положении (ФИГ. 78) диапазона положений сдвигающая шестерня 8652 может высвобождаться от второй ведомой шестерни 8624, а например, во втором положении (ФИГ. 77) диапазона положений сдвигающая шестерня 8652 может входить во взаимодействие со второй ведомой шестерней 8624. В тех случаях, когда сдвигающая шестерня 8652 взаимодействует со второй приводной шестерней 8624, сдвигающая шестерня 8652 может передавать усилие от приводной шестерни 8644 на вторую ведомую шестерню 8624 так, что двигатель 8640 может влиять на хирургическую функцию посредством, например, второй выходной приводной системы 8620. Кроме того, в вариантах, когда сдвигающая шестерня 8652 высвобождается от второй ведомой шестерни 8624, поворот двигателя 8640, например, не может передаваться ко второй выходной приводной системе 8620.
В различных вариантах узел переключения 8648 дополнительно может содержать промежуточную и/или передаточную шестерню 8654. Передаточная шестерня 8642 может быть выполнена с возможностью передачи приводного усилия от сдвигающей шестерни 8652, например, к первой ведомой шестерне 8614. В различных вариантах передаточная шестерня 8654 может находиться в зубчатом взаимодействии, например, с первой ведомой шестерней 8614 так, что поворот передаточной шестерни 8654 передается на первую ведомую шестерню 8614. Кроме того, в различных вариантах сдвигающая шестерня 8652 может входить и/или выходить из взаимодействия с передаточной шестерней 8654. Например, в первом положении (ФИГ. 78) диапазона положений сдвигающая шестерня 8652 может высвобождаться от передаточной шестерни 8654, а например, во втором положении (ФИГ. 77) из диапазона положений сдвигающая шестерня 8652 высвобождаться от передаточной шестерни 8654. В вариантах, когда сдвигающая шестерня 8652 взаимодействует с передаточной шестерней 8654, сдвигающая шестерня 8652 может передавать усилие от приводной шестерни 8644 на первую ведомую шестерню 8614 через передаточную шестерню 8654. В таких вариантах двигатель 8640 может влиять на хирургическую функцию, например, посредством первой выходной приводной системы 8610. Кроме того, в вариантах, когда сдвигающая шестерня 8652 высвобождается от передаточной шестерни 8654, поворот двигателя 8640, например, не может передаваться к первой выходной приводной системе 8610.
В различных вариантах передаточная шестерня 8654 может быть установлена с возможностью поворота на второй приводной вал 8622 второй выходной приводной системы 8620. Например, передаточная шестерня 8654 может быть выполнена с возможностью поворота относительно второго приводного вала 8622, не влияя при этом на поворот второго приводного вала 8622 и присоединенной к нему второй ведомой шестерни 8624. В различных вариантах узел переключения 8648 может включать в себя держатель или кольцо 8650, которое может по меньшей мере частично окружать сдвигающую шестерню 8652. Держатель 8650 может располагаться, например, вокруг сдвигающей шестерни 8652, так что перемещение держателя 8650 может приводить к перемещению сдвигающей шестерни 8652.
В различных вариантах рукоятка 8600 и/или сдвигающий узел 8648 дополнительно может включать в себя спусковой механизм или собачку 8630. Собачка 8630 может быть выполнена с возможностью сдвига держателя 8650 и/или сдвигающей шестерни 8652 в пределах диапазона положений. Например, собачка 8630 может представлять собой спусковой механизм, проходящий от рукоятки 8600, и может взаимодействовать с держателем 8650 и/или сдвигающей шестерней 8652. В различных вариантах держатель 8650 может включать в себя штифт 8656, который может проходить от держателя 8640 в отверстие 8638 (ФИГ. 75) в собачке 8630. Например, собачка 8630 может включать в себя плечо 8632 и/или пару плеч 8632, соединенных с осью поворота 8634 на рукоятке 8600. Собачка 8630 может, например, поворачиваться вокруг оси поворота 8634, и поворот плеча(ей) 8632 может приводить к перемещению штифта 8656 держателя 8560. Перемещение держателя 8650 позволяет сдвигать сдвигающую шестерню 8652, например, между первым положением (ФИГ. 78) и вторым положением (ФИГ. 77).
В различных вариантах перемещение держателя 8650 может быть ограничено так, что сдвигающая шестерня 8652 будет двигаться вдоль продольной оси по диапазону положений. Кроме этого, рабочий ход поворота и/или диапазон перемещения собачки 8630 может быть, например, фиксированным и/или ограниченным так, что сдвигающая шестерня 8652 будет оставаться в пределах диапазона положений в процессе поворота собачки 8630. Более того, отверстие 8638 (ФИГ. 75) в собачке 8630 может быть выполнено и/или сконструировано таким образом, чтобы оставлять и/или удерживать сдвигающую шестерню 8652 в пределах диапазона положений и/или в выравнивании, например, со второй ведомой шестерней 8624 и/или передаточной шестерней 8654. В различных вариантах рукоятка 8600 может включать в себя пружину или иной смещающий механизм для смещения сдвигающей шестерни 8652 в первое или во второе положение. В некоторых вариантах рукоятка 8600 может включать в себя ограничительный механизм с двумя устойчивыми состояниями для удерживания сдвигающей шестерни 8652 в первом положении или втором положении. В ситуации, когда сдвигающая шестерня 8652 находится между первым и вторым положениями, этот ограничительный механизм с двумя устойчивыми состояниями может быть динамически неустойчивым и может действовать на сдвигающую шестерню 8652, переводя ее в первое положение или во второе положение. В альтернативном варианте осуществления сдвигающая шестерня 8652 может смещаться в промежуточное положение, в котором сдвигающая шестерня 8652 может, например, одновременно взаимодействовать с первой выходной приводной системой 8610 и со второй выходной приводной системой 8620. В качестве дополнения или альтернативы, рукоятка 8600 может включать в себя блокиратор и/или стопор для удерживания сдвигающей шестерни 8652, например, в одном из первого или второго положений.
Хирургический инструмент может включать в себя поворачиваемый приводной вал, выполненный с возможностью приведения в действие закрывающего привода и пускового привода хирургического инструмента. Как показано на ФИГ. 79–84, хирургический инструмент 10000 может включать в себя поворачиваемый приводной вал 10020, закрывающий привод 10030 и пусковой привод 10040. Как будет описано ниже более подробно, приводной вал 10020 может включать в себя первую резьбу 10024, выполненную с возможностью приведения в действие закрывающего привода 10030, и вторую резьбу 10026, выполненную с возможностью приведения в действие пускового привода 10040. В различных случаях инструмент 10000 могут представлять собой, например, круговой сшивающий инструмент.
Хирургический инструмент 10000 может содержать раму 10002 и средства для генерации поворотных перемещений. В некоторых вариантах поворотное перемещение может создаваться, например, заводной ручкой с ручным приводом, а в различных других вариантах поворотное перемещение может создаваться электродвигателем. В любом случае сгенерированное поворотное перемещение может быть передано на поворотный входной вал 10010. Входной вал 10010 может включать в себя проксимальный подшипниковый участок 10011 и дистальный подшипниковый участок 10013, которые удерживаются с возможностью поворота рамой 10002. В различных вариантах проксимальная подшипниковая часть 10011 и/или дистальная подшипниковая часть 10013 могут удерживаться непосредственно рамой 10002, тогда как в некоторых вариантах проксимальная подшипниковая часть 10011 и/или дистальная подшипниковая часть 10013 может включать в себя подшипник, расположенный между входным валом 10010 и рамой 10002. Входной вал 10010 может дополнительно включать в себя шестерню 10012, которая установлена и/или закреплена шпонкой на входном валу 10010 так, что когда входной вал 10010 поворачивается в направлении A (ФИГ. 79), шестерня 10012 также поворачивается в направлении A. Соответственно, когда входной вал 10010 поворачивается во втором направлении, т.е. направлении A’ (ФИГ. 82), шестерня 10012 также поворачивается в направлении A’.
Как показано преимущественно на ФИГ. 79 и 80, приводной вал 10020 может включать в себя проксимальный конец 10021 и дистальный конец 10023. Проксимальный конец 10021 и дистальный конец 10023 могут удерживаться с возможностью поворота рамой 10002. В различных вариантах проксимальный конец 10021 и/или дистальный конец 10023 может удерживаться непосредственно рамой 10002, тогда как в некоторых вариантах проксимальный конец 10021 и/или дистальный конец 10023 может включать в себя подшипник, расположенный между приводным валом 10020 и рамой 10002. Шестерня 10022 может быть установлена и/или закреплена шпонкой на проксимальном конце 10021 приводного вала 10020. Шестерня 10022 находится в зубчатом взаимодействии с шестерней 10012 так, что когда входной вал 10010 поворачивается в направлении A, приводной вал 10020 поворачивается в направлении B. Соответственно, как показано на ФИГ. 81, когда входной вал 10010 поворачивается в направлении A’, приводной вал 10020 поворачивается в направлении B’.
Как показано на ФИГ. 79, система 10030 закрывающего привода может включать в себя закрывающий штифт 10032, взаимодействующий с первой резьбой 10024 приводного вала 10020. Система 10030 закрывающего привода может дополнительно содержать закрывающий элемент 10033, выполненный с возможностью поступательного перемещения. Закрывающий штифт 10032 расположен внутри отверстия, образованного в проксимальном конце закрывающего элемента 10033. Закрывающий штифт 10032 может включать в себя первый конец, расположенный внутри желоба, образованного первой резьбой 10024. При повороте приводного вала 10020 боковая стенка желоба может входить в контакт с первым концом закрывающего штифта 10032 и обеспечивать смещение закрывающего штифта 10032 проксимально или дистально в зависимости от направления поворота приводного вала 10020. Например, при повороте приводного вала 10020 в направлении B (ФИГ. 79) закрывающий штифт 10032 может смещаться или поступательно перемещаться дистально, как указано в направлении D. Соответственно, при повороте приводного вала 10020 в направлении B’ (ФИГ. 82) закрывающий штифт 10032 может смещаться или поступательно перемещаться проксимально, как указано в направлении P. Закрывающий штифт 10032 может плотно приниматься в отверстии, образованном в закрывающем элементе 10033 так, что смещение или поступательное перемещение закрывающего штифта 10032 сообщается закрывающему элементу 10033. Читателю следует понимать, что закрывающий штифт 10032 и закрывающий элемент 10033 ограничены в возможности поворота относительно рамы 10002 так, что поворот приводного вала 10020 преобразуется в поступательное перемещение закрывающего штифта 10032 и закрывающего элемента 10033.
Как преимущественно показано на ФИГ. 80, первая резьба 10024 проходит вдоль первой длины 10025 приводного вала 10020. В некоторых случаях первая резьба 10024 может проходить вдоль всей длины приводного вала 10020, тогда как в других обстоятельствах первая резьба 10024 может проходить вдоль участка, длина которого меньше, чем вся длина приводного вала 10020. Первая резьба 10024 может включать в себя проксимальный участок, смежный с проксимальным концом 10021 приводного вала 10020, и дистальный участок, смежный с дистальным концом 10023 приводного вала 10020. Когда закрывающий штифт 10032 находится в дистальном участке первой резьбы 10024, как показано на ФИГ. 81, закрывающий элемент 10033 может располагать упор хирургического инструмента 10000 в открытом положении. При повороте приводного вала 10020 в направлении B’ закрывающий штифт 10032 может поступательно перемещаться до тех пор, пока закрывающий штифт 10032 не достигнет проксимального участка первой резьбы 10024, как показано на ФИГ. 82. При перемещении закрывающего штифта 10032 проксимально закрывающий штифт 10032 может вытягивать закрывающий элемент 10033 и упор проксимально. При достижении закрывающим штифтом 10032 проксимального участка первой резьбы 10024 упор может быть в полностью закрытом положении.
В дополнение к указанному выше, закрывающий привод 10030 может приводиться в действие, чтобы перемещать упор хирургического инструмента 10000 в подходящее положение относительно кассеты со скобками. В различных вариантах хирургический инструмент 10000 может включать в себя исполнительный механизм, который может приводиться в действие в первом направлении для поворота входного вала 10010 в направлении A и приводного вала 10020 в направлении B, и во втором направлении для поворота входного вала 10010 в направлении A’ и приводного вала 10020 в направлении B’. В различных вариантах хирургический инструмент 10000 может включать в себя исполнительный механизм, выполненный с возможностью поворачивать входной вал 10010 в направлении A и приводной вал 10020 в направлении B при приведении в действие, и второй исполнительный механизм, выполненный с возможностью поворачивать входной вал 10010 в направлении A’ и приводной вал 10020 в направлении B’ при приведении в действие. В любом случае пользователь хирургического инструмента 10000 может по мере необходимости перемещать упор хирургического инструмента 10000 к кассете со скобками и от нее для получения желаемого зазора между упором и кассетой со скобками. Такой желаемый зазор может создаваться или не создаваться, когда упор находится в полностью закрытом положении.
В дополнение к указанному выше, хирургический инструмент 10000 может включать в себя захват, выполненный с возможностью принимать и удерживать с возможностью высвобождения приводной штифт 10032 при переходе закрывающей системы 10030 в полностью закрытую конфигурацию. Как показано преимущественно на ФИГ. 81 и 82, хирургический инструмент 10000 может включать в себя захватывающий ригель 10073, содержащий захватное отверстие 10077, образованное в нем. При перемещении приводного штифта 10032 проксимально приводной штифт 10032 может выравниваться с захватным отверстием 10077, а затем по меньшей мере частично заходит в него. Захватный штифт 10032 может смещаться к захватывающему ригелю 10073 под действием пружины 10035, расположенной между закрывающим элементом 10033 и кольцевой головкой 10037, проходящей вокруг захватного штифта 10032. При расположении захватного штифта 10032 дистально относительно захватного отверстия 10077 пружина 10035 может смещать приводной штифт 10032 к захватывающему ригелю 10073. При перемещении захватного штифта 10032 проксимально посредством поворота приводного винта 10020 и его выравнивании с захватным отверстием 10077 пружина 10035 может перемещать приводной штифт 10032 вверх в захватное отверстие 10077. Приводной штифт 10032 может перемещаться вверх посредством пружины 10035 до тех пор, пока головка приводного штифта 10032 не вступит в контакт с захватывающим ригелем 10073. В частности, перемещение приводного штифта 10032 к захватному отверстию 10077 может вызывать высвобождение приводного штифта 10032 из функционального взаимодействия с первой резьбой 10024. Таким образом, закрывающая система 10030 может быть дезактивирована при достижении приводным штифтом 10032 захватного отверстия 10077 так, что при последующем повороте приводной вал 10020 не перемещает приводной штифт 10032, закрывающий элемент 10033 и упор, находящиеся в функциональном взаимодействии с ним, по меньшей мере до тех пор, пока приводной штифт 10032 повторно не вступит во взаимодействие с первой резьбой 10024, как дополнительно описано ниже.
Как сказано выше, вход приводного штифта 10032 в захватное отверстие 10077 захватывающего ригеля 10073 может означать окончание закрывающего хода закрывающей системы 10030 и полностью закрытое положение упора. В различных вариантах захватывающий ригель 10073 может не быть выполнен с возможностью перемещения относительно рамы 10002, и захватное отверстие 10077 может определять границы неподвижного положения. В других вариантах захватывающий ригель 10073 может быть выполнен с возможностью перемещения относительно рамы 10002. В таких вариантах конечное, закрытое положение упора будет зависеть от положения захватного отверстия 10077. Таким образом, зазор между упором и кассетой со скобками хирургического инструмента 10000 будет зависеть от положения захватного отверстия 10077. Как по существу показано на ФИГ. 79, хирургический инструмент 10000 может дополнительно содержать систему 10070 регулирования зазора, выполненную с возможностью перемещать захватывающий ригель 10073. Система регулирования зазора 10070 может содержать поворачиваемую ручку 10072 и приводную шестерню 10071, взаимодействующую с поворачиваемой ручкой 10072. Захватывающий ригель 10073 может включать в себя рейку 10075, проходящую от него и содержащую множество зубьев. Приводная шестерня 10071 имеет зубчатое взаимодействие с рейкой 10075 так, что при повороте ручки 10072 в первом направлении рейка 10075 может выталкивать захватывающий ригель 10073 дистально, и при повороте ручки 10072 во втором направлении, противоположном первому направлению, рейка 10075 может выталкивать захватывающий ригель 10073 проксимально. При перемещении захватывающего ригеля 10073 дистально захватное отверстие 10077 может располагаться так, что между упором и кассетой со скобками образуется больший зазор, когда закрывающий привод 10030 находится в полностью закрытом положении. При перемещении захватывающего ригеля 10073 проксимально захватное отверстие 10077 может располагаться так, что между упором и кассетой со скобками образуется меньший зазор, когда закрывающий привод 10030 находится в полностью закрытом положении. В различных вариантах захватное отверстие 10077 может быть выполнено с возможностью установки в пределах диапазона положений, способного вместить диапазон расстояний между упором и кассетой со скобками хирургического инструмента 10000.
В различных вариантах система 10070 регулирования зазора может содержать фиксирующий элемент ручки, выполненный с возможностью высвобождения удерживать ручку 10072 на месте. Например, рама 10002 может включать в себя фиксирующий выступ 10004, проходящий от нее и который может приниматься в одном или более фиксирующих отверстиях 10074, образованных в ручке 10072. Фиксирующие отверстия 10074 могут быть расположены вдоль кольцевой траектории. Каждое фиксирующее отверстие 10074 может соответствовать заданному положению 10030 закрывающего привода и заданному расстоянию зазора между упором и кассетой со скобками хирургического инструмента 10000. Например, при расположении фиксирующего выступа 10004 в первом фиксирующем отверстии 10074 закрывающий привод 10030 удерживается в первом заданном положении, и соответственно упор удерживается на первом заданном расстоянии от кассеты со скобками. Для перемещения ручки 10072 во второе заданное положение ручка 10072 может подниматься от рамы 10002 так, что фиксирующий выступ 10004 больше не будет расположен в первом фиксирующем отверстии 10074, поворачиваться с выталкиванием рейки 10075 и захватывающего ригеля 10073 и затем перемещаться к раме 10002 так, что фиксирующий выступ 10004 входит во второе фиксирующее отверстие 10074, образованное в ручке 10072. При расположении фиксирующего выступа 10004 во втором фиксирующем отверстии 10074 закрывающий привод 10030 может удерживаться во втором заданном положении, и, соответственно, упор может удерживаться на втором заданном расстоянии от кассеты со скобками, отличающемся от первого заданного расстояния. Для перемещения ручки 10072 в третье заданное положение ручка 10072 может подниматься от рамы 10002 так, что фиксирующий выступ 10004 больше не будет расположен в первом или втором фиксирующем отверстии 10074, поворачиваться с выталкиванием рейки 10075 и захватывающего ригеля 10073 и затем перемещаться к раме 10002 так, что фиксирующий выступ 10004 входит в третье фиксирующее отверстие 10074, образованное в ручке 10072. При расположении фиксирующего выступа 10004 в третьем фиксирующем отверстии 10074 закрывающий привод 10030 может удерживаться в третьем заданном положении, и соответственно упор удерживается на третьем заданном расстоянии от кассеты со скобками, отличающемся от первого и второго заданных расстояний. Система 10070 регулирования зазора может дополнительно включать в себя смещающий элемент, выполненный с возможностью смещать ручку 10072 к раме 10002. Например, система 10070 регулирования зазора может включать в себя пружину 10076, расположенную между корпусом 10002 и приводной шестерней 10071, например, выполненной с возможностью смещать фиксирующее отверстие 10074 во взаимодействие с фиксирующим выступом 10004.
В отдельных вариантах пользователь хирургического инструмента 10000 может определить положение закрывающей системы 10030, наблюдая за положением упора. Однако в некоторых вариантах упор нельзя увидеть в пределах хирургического поля. Как преимущественно показано на ФИГ. 79, хирургический инструмент 10000 может дополнительно содержать систему 10050 указания положения упора, выполненную с возможностью указания положения упора. Система 10050 указания положения упора может включать в себя окошко 10058, образованное в раме 10002, и поворотный элемент 10051, который можно наблюдать через окошко 10058. Поворотный элемент 10051 может включать в себя шарнир 10052, установленный с возможностью поворота на раме 10002, приводной конец 10054 и дисплейный конец 10056. Поворотный элемент 10051 может быть выполнен с возможностью перемещения между первым положением (ФИГ. 81), указывающим на то, что упор находится в полностью открытом положении, вторым положением (ФИГ. 82), указывающим на то, что упор находится в полностью закрытом положении, и диапазоном положений между первым положением и вторым положением, отражающими ряд положений упора. Закрывающая система 10030 может быть выполнена с возможностью входить в контакт с приводным концом 10054 поворотного элемента 10051 с целью перемещения поворотного элемента 10051. При перемещении приводного штифта 10032 проксимально посредством приводного вала 10020, как преимущественно показано на ФИГ. 82, приводной штифт 10032 может вытягивать закрывающий элемент 10033 проксимально так, что буртик 10036, образованный на закрывающем элементе 10033, может взаимодействовать с приводным концом 10054 поворотного элемента 10051 и поворачивать поворотный элемент 10051 вокруг шарнира 10052. Поворот поворотного элемента 10051 заставляет дисплейный конец 10056 перемещаться в пределах окошка 10058, указывая положение упора. Чтобы способствовать наблюдению рама 10002 и/или окошко 10058 могут включать в себя одну или более пограничных отметок 10059, которые могут указывать положение упора. Например, при совмещении дисплейного конца 10056 поворотного элемента 10051 с проксимальной пограничной отметкой 10059 (ФИГ. 81) пользователь может определить, что упор находится в открытом положении, и при выравнивании дисплейного конца 10056 с дистальной пограничной отметкой 10059 (ФИГ. 82) пользователь может определить, что упор находится в закрытом положении. Если дисплейный конец 10056 расположен в промежутке между проксимальной и дистальной пограничными отметками 10059 пользователь может предположить, что упор находится в положении между открытым положением и закрытым положением. Дополнительные пограничные отметки 10059 между проксимальной и дистальной пограничными отметками 10059 могут использоваться для указания дополнительных положений упора. При перемещении закрывающего элемента 10033 дистально для открытия упора (ФИГ. 84) поворотный элемент 10051 может поворачиваться обратно в первое положение и вновь выравниваться с проксимальной пограничной отметкой 10059. Система 10050 указания положения может дополнительно включать в себя смещающий элемент, например, такой как пружина, выполненный с возможностью смещать поворотный элемент 10051 в первое положение.
Как сказано выше, закрывающую систему 10030 хирургического инструмента 10000 можно при приведении в действие, чтобы расположить упор хирургического инструмента 10000 относительно кассеты со скобками. Во время работы закрывающей системы 10030 пусковая система 10040 может не работать. Пусковая система 10040 может быть выполнена без возможности функционального взаимодействия с приводным стволом 10020 до тех пор, пока закрывающий привод 10030 не достигнет полностью закрытого положения. Хирургический инструмент 10000 может включать в себя переключатель, например, такой как переключатель 10060, выполненный с возможностью переключать хирургический инструмент между режимом закрытия упора и режимом выталкивания скоб. Закрывающий привод 10030 может дополнительно включать в себя переключающий штифт 10031, проходящий от проксимального конца закрывающего элемента 10033. Сравнив ФИГ. 81 и 82, читатель поймет, что переключающий штифт 10031 взаимодействует с переключателем 10060 при перемещении закрывающего штифта 10032 проксимально для закрытия упора. Переключатель 10060 может быть установлен с возможностью поворота на раме 10002 вокруг шарнира 10062 и может включать в себя один или более плеч 10064, проходящих от него. Переключающий штифт 10031 может входить в контакт с плечами 10064 и поворачивать переключатель 10060 вокруг шарнира 10062 при достижении приводным штифтом 10032 полностью закрытого положения. Переключатель 10060 может дополнительно содержать плечо 10066, проходящее от него и выполненное с возможностью толкать пусковую гайку 10042 пускового привода 10040 в функциональное взаимодействие с приводным стволом 10020, при повороте переключателя 10060 вокруг шарнира 10062. Конкретнее, по меньшей мере в одном случае плечо 10066 может быть выполнен с возможностью дистально смещать толкающую штангу 10044, которая в свою очередь толкает пусковую гайку 10042 на вторую резьбу 10026. В этот момент приводной штифт 10032 и закрывающая система 10030 могут не взаимодействовать с первой резьбой 10024 благодаря захватному отверстию 10077, описанному выше, и пусковая гайка 10042 и пусковая система 10040 могут вступить во взаимодействие со второй резьбой 10026.
В дополнение к указанному выше, пусковая гайка 10042 может содержать резьбовое отверстие 10041, образованное в ней, которое может входить в резьбовое взаимодействие со второй резьбой 10026. Во время приведения в действие 10030 закрывающего привода, в дополнение к указанному выше, пусковая гайка 10042 может располагаться проксимально относительно второй резьбы 10026 так, что резьбовое отверстие 10041 не находится в резьбовом взаимодействии со второй резьбой 10026. В таких обстоятельствах пусковая гайка 10042 может оставаться не задействованной во время поворота приводного вала 10020 с целью приведения в действие закрывающей системы 10030. При смещении пусковой гайки 10042 дистально, в дополнение к указанному выше, резьбовое отверстие 10041 может вступить в резьбовое взаимодействие со второй резьбой 10026. После вступления пусковой гайки 10042 в резьбовое взаимодействие со второй резьбой 10026 поворот приводного вала 10020 в направлении B’ (ФИГ. 82) обуславливает смещение пусковой гайки 10042 дистально. Пусковая гайка 10042 может включать в себя один или более противоповоротных элементов, например, таких как фланцы 10043, которые могут взаимодействовать с возможностью скольжения с рамой 10002 для предотвращения поворота пусковой гайки 10042 вместе с приводным стволом 10020. Пусковой привод 10040 может дополнительно включать в себя пусковой элемент, соединенный с пусковой гайкой 10042, который может проталкиваться дистально посредством пусковой гайки 10042. Пусковой элемент может быть выполнен с возможностью выталкивать скоб из кассеты со скобками. При достижении пусковой гайкой 10042 дистального конца второй резьбы 10026 пусковая гайка 10042 может высвобождаться из резьбового взаимодействия со второй резьбой 10026, причем дополнительный поворот приводного вала 10020 в направлении B’ может больше не выдвигать вперед пусковую гайку 10042.
Как преимущественно показано на ФИГ. 82 и 83, хирургический инструмент 10000 может дополнительно содержать исполнительный механизм 10047 обратного действия, расположенный на дистальном конце второй резьбы 10026. Пусковая гайка 10042 может быть выполнена с возможностью входить в контакт с исполнительным механизмом 10047 обратного действия и смещать исполнительный механизм 10047 обратного действия дистально при достижении пусковой гайкой 10042 дистального конца второй резьбы 10026. Смещающий элемент, например, такой как пружина 10048, может быть расположен между исполнительным механизмом 10047 обратного действия и рамой 10002 и может быть выполнен с возможностью препятствовать дистальному перемещению исполнительного механизма 10047 обратного действия. Дистальное перемещение исполнительного механизма 10047 обратного действия может обуславливать сжатие пружины 10048, как показано на ФИГ. 83, и прикладывать к пусковой гайке 10042 проксимальное смещающее усилие. При повороте приводного вала 10020 в направлении B проксимальное смещающее усилие, прикладываемое к пусковой гайке 10042, обеспечивает повторное вступление резьбового отверстия 10041 пусковой гайки 10042 во взаимодействие со второй резьбой 10026, и пусковая гайка 10042 может перемещаться проксимально, как показано на ФИГ. 84. Проксимальное перемещение пусковой гайки 10042 может перемещать пусковой элемент проксимально. При проксимальном перемещении пусковая гайка 10042 может смещать толкающую штангу 10044 так, что толкающая штанга 10044 вступает в контакт с рычагом 10066 переключателя 10060 и поворачивает выключатель 10060 в противоположном направлении, назад в выключенное положение. В этот момент пусковая гайка 10042 высвобождается из резьбового взаимодействия со второй резьбой 10026, и последующий поворот приводного вала 10020 в направлении B не вызывает дальнейшего смещения пусковой гайки 10042 проксимально. В этот момент пусковая гайка 10042 возвращается в положение холостого хода.
При повороте переключателя 10060 назад в исходное положение, в дополнение к указанному выше, плечи 10064 переключателя 10060 могут толкать переключающий штифт 10031 и закрывающий элемент 10033 дистально. Дистальное перемещение переключающего штифта 10031 и закрывающего элемента 10033 может смещать приводной штифт 10032 из захватного отверстия 10077, образованного в захватывающем ригеле 10073. При выходе приводного штифта 10032 из захватного отверстия 10077 приводной штифт 10032 может перемещаться вниз, против смещающего усилия пружины 10035, скользя под захватывающим ригелем 10073. Перемещение приводного штифта 10032 вниз может обуславливать повторное вступление приводного штифта 10032 во взаимодействие с первой резьбой 10024. Последующий поворот приводного вала 10020 в направлении B сместит приводной штифт 10032 и закрывающий элемент 10033 дистально с открытием упора хирургического инструмента 10000. В этот момент хирургический инструмент 10000 будет перенастроен для последующего применения. В различных вариантах кассета со скобками может быть заменена и/или перезагружена, и хирургический инструмент 10000 может снова использоваться.
Читателю следует понимать из вышеизложенного, что приводной винт 10020 может смещать приводной штифт 10032 с целью приведения в действие закрывающего привода 10030 и пусковой гайки 10042 с целью приведения в действие пускового привода 10040. В дополнение к указанному выше, приводной винт 10020 может смещать приводной штифт 10032 вдоль первой длины 10025 приводного винта 10020. Аналогично, приводной винт 10020 может смещать пусковую гайку 10042 вдоль второй длины 10027 приводного винта 10020. Первая длина 10025 может образовывать ход закрытия закрывающей системы 10030, и вторая длина 10027 может образовывать пусковой ход пускового хода 10040. Первая длина 10025 может быть больше, чем вторая длина 10027, хотя в некоторых вариантах вторая длина 10027 может быть больше, чем первая длина 10025. В процессе применения пусковая гайка 10042 может пропускать закрывающий штифт 10032. Например, при перемещении закрывающего штифта 10032 проксимально с целью закрытия упора пусковая гайка 10042 может пропускать закрывающий штифт 10032, когда пусковая гайка 10042 находится в положении холостого хода. Аналогично, пусковая гайка 10042, находясь в положении холостого хода, может пропускать закрывающий штифт 10032 при перемещении закрывающего штифта 10032 дистально с целью открытия упора. Для способствования этому относительному перемещению пусковая гайка 10042 может включать в себя отверстие, например, такое как сквозной паз 10046, образованный в ней, который может пропускать через себя закрывающий штифт 10032 при перемещении закрывающего штифта 10032 относительно пусковой гайки 10042. Такое отверстие, образованное в пусковой гайке 10042, также позволяет пусковой гайке 10042 скользить по закрывающему штифту 10032 в различных других вариантах осуществления.
В дополнение к указанному выше, первая длина 10025 и вторая длина 10027 могут по меньшей мере частично накладываться друг на друга. Более того, первая резьба 10024 и вторая резьба 10026 могут по меньшей мере частично накладываться друг на друга. Первая резьба 10024 и вторая резьба 10026 могут быть образованы на одном и том же участке приводного винта 10020. Первая резьба 10024 и вторая резьба 10026 могут существенно различаться так, что закрывающий штифт 10032 не может следовать по второй резьбе 10026, и так, что пусковая гайка 10042 не может следовать по первой резьбе 10024. Например, первая резьба 10024 может включать в себя шаг первой резьбы, и вторая резьба 10026 может включать в себя шаг второй резьбы, отличающийся от шага первой резьбы. Шаг первой резьбы первой резьбы 10024 может быть, а может и не быть постоянным. В случае если шаг первой резьбы является постоянным, закрывающий штифт 10032 и упор, функционального взаимодействующие с первой резьбой 10024, будут перемещаться с постоянной скоростью на всем протяжении закрывающего хода при данной скорости поворота приводного вала 10020. В случае если шаг первой резьбы не является постоянным, закрывающий штифт 10032 и упор будут перемещаться с различными скоростями во время закрывающего хода при данной скорости поворота приводного вала 10020. Например, дистальный участок первой резьбы 10024 может включать в себя шаг резьбы большего размера, чем шаг резьбы проксимального участка первой резьбы 10024. В таких обстоятельствах упор будет быстро перемещаться от открытого положения и значительно медленнее при приближении к закрытому положению при данной скорости поворота приводного вала 10020. Такая конфигурация обеспечит быстрое перемещение упора в положение вплотную к ткани, расположенной между упором и кассетой со скобками, и затем, после вступления упора во взаимодействие с тканью, медленное перемещение, чтобы уменьшить возможность чрезмерного сжатия ткани. В различных других вариантах дистальный участок первой резьбы 10024 может включать в себя шаг резьбы меньшего размера, чем шаг резьбы проксимального участка первой резьбы 10024. В любом случае шаг резьбы может изменяться в промежутке между концами первой резьбы 10024. Такое изменение может быть линейным и/или нелинейным.
В дополнение к указанному выше, шаг второй резьбы второй резьбы 10026 может быть, а может и не быть постоянным. В случае если шаг второй резьбы является постоянным, пусковая гайка 10042 и пусковой элемент, функционального взаимодействующие со второй резьбой 10026, будут перемещаться с постоянной скоростью на всем протяжении закрывающего хода при данной скорости поворота приводного вала 10020. В случае если шаг второй резьбы не является постоянным, пусковая гайка 10042 и пусковой элемент будут перемещаться с различными скоростями во время пускового хода при данной скорости поворота приводного вала 10020. Например, дистальный участок второй резьбы 10026 может включать в себя шаг резьбы меньшего размера, чем шаг резьбы проксимального участка второй резьбы 10026. В таких обстоятельствах пусковой элемент будет перемещаться медленнее в конце пускового хода при данной скорости поворота приводного вала 10020. Такая конфигурация обеспечит замедление пускового элемента при достижении им конечного этапа способа формирования скоб. Более того, такая конфигурация позволяет генерировать больший момент в конце пускового хода, что соотносится с окончанием способа формирования скоб. В различных других вариантах дистальный участок второй резьбы 10026 может включать в себя шаг резьбы большего размера, чем шаг резьбы проксимального участка второй резьбы 10026. В любом случае шаг резьбы может изменяться в промежутке между концами второй резьбы 10026. Такое изменение может быть линейным и/или нелинейным.
Как показано на ФИГ. 86–93, хирургический инструмент 10500 может включать в себя ствол 10504 и концевой эффектор 10505. Концевой эффектор 10505 может включать в себя кассету со скобками 10506 и упор 10508, выполненный с возможностью перемещения. Хирургический инструмент 10500 может включать в себя закрывающий привод, включая закрывающий элемент, выполненный с возможностью функционального взаимодействия с упором 10504, и пусковой привод, включая пусковой элемент, выполненный с возможностью размещения скоб из кассеты 10506 со скобками. Хирургический инструмент 10500 может включать в себя средства для генерирования поворотного перемещения, например, такие как ручной кривошип и/или электрический двигатель. Поворотное перемещение может передаваться на входной вал 10510. Хирургический инструмент 10500 может включать в себя трансмиссию 10502, выполненную с возможностью избирательно передавать поворот входного вала 10510 закрывающему приводу и пусковому приводу, как дополнительно описано ниже.
Входной вал 10510 может включать в себя входную шестерню 10512, установленную на нем и/или закрепленную шпонкой и вращающуюся вместе с входным стволом 10510. Входной вал 10510 может удерживаться с возможностью поворота рамой хирургического инструмента 10500 посредством проксимального конца 10511 и дистального конца 10519. Входная шестерня 10512 может находиться в зубчатом взаимодействии с промежуточной шестерней 10522, установленной на промежуточном стволе 10520 и/или закрепленной шпонкой. Таким образом, при повороте входного вала 10510 и входной шестерни 10512 в направлении A (ФИГ. 89) промежуточный ствол 10520 и промежуточная шестерня 10522 поворачиваются в направлении B (ФИГ. 89). Аналогично указанному выше, промежуточный ствол 10520 может удерживаться с возможностью поворота рамой хирургического инструмента посредством проксимального конца 10521 и дистального конца 10529. Промежуточный ствол 10520 может дополнительно включать в себя резьбовой участок 10524, который может находиться в резьбовом взаимодействии с фиксатором 10526 сдвигателя. Как преимущественно показано на ФИГ. 87, фиксатор 10526 сдвигателя может включать в себя одно или более резьбовых отверстий 10527, находящихся в резьбовом взаимодействии с резьбовым участком 10524. При повороте промежуточного ствола 10520 в направлении B, как преимущественно показано на ФИГ. 89, промежуточный ствол 10520 может смещать фиксатор 10526 сдвигателя проксимально.
В дополнение к указанному выше, фиксатор 10526 сдвигателя может включать в себя паз 10528 шестерни, образованный в нем. Входной вал 10510 может дополнительно включать в себя скользящую шестерню 10516, установленную на нем с возможностью скольжения и расположенную в пазу 10528 шестерни. При перемещении фиксатора 10526 сдвигателя проксимально посредством промежуточного ствола 10520, как указано выше, фиксатор 10526 сдвигателя может толкать скользящую шестерню 10516 проксимально вдоль сцепленного участка 10514 входного вала. Как преимущественно показано на ФИГ. 87, скользящая шестерня 10516 может включать в себя отверстие 10517, образованное в ней и включающее в себя, например, одну или более плоских поверхностей, выровненных с соответствующими плоскими поверхностями на сцепленном участке 10514 входного вала. Плоские поверхности отверстия 10517 и сцепленного участка 10514 входного вала могут позволить скользящей шестерне 10516 скользить продольно вдоль входного вала 10510 и, кроме того, взаимодействуют, что передавать поворотное перемещение от скользящей шестерни 10516 приводному стволу 10510 и наоборот. Как будет более подробно описано ниже, фиксатор 10526 сдвигателя может перемещать скользящую шестерню 10516 через первый диапазон положений, в котором скользящая шестерня 10516 взаимодействует со стволом закрытия 10530, второй диапазон положений, в котором скользящая шестерня 10516 взаимодействует с пусковым стволом 10540, и нейтральное положение или диапазон нейтральных положений между первым диапазоном и вторым диапазоном положений, в котором скользящая шестерня 10516 не взаимодействует ни с закрывающим стволом 10530, ни с пусковым стволом 10540.
В дополнение к указанному выше, на ФИГ. 85 отображен упор 10508 концевого эффектора 10505 в полностью закрытом положении и пусковой шкив 10548 в неактивированном положении. На ФИГ. 86 отображена трансмиссия 10502 в конфигурации, соответствующей конфигурации концевого эффектора 10505, представленной на ФИГ. 85. Конкретнее, скользящая шестерня 10516 находится в нейтральном положении или положении холостого хода и не взаимодействует функционально со стволом закрытия 10530 закрывающего привода или пусковым стволом 10540 пускового привода. Когда скользящая шестерня 10516 находится в нейтральном положении, скользящая шестерня 10516 расположена между закрывающей шестерней 10532, установленной на закрывающем стволе 10530 и/или сцепленной с ним, и пусковой шестерней 10542, установленной на пусковом стволе 10540 и/или сцепленной с ним. Более того, скользящая шестерня 10516 не взаимодействует с закрывающей шестерней 10532 или пусковой шестерней 10542, когда скользящая шестерня 10516 находится в положении холостого хода. Для перемещения упора 10508 в открытое положение и/или высвобождения упора 10508 от концевого эффектора 10505, как показано на ФИГ. 88, входной вал 10510 может поворачиваться в направлении A, как показано на ФИГ. 89. Как указано выше, поворот входного вала 10510 в направлении A может поворачивать промежуточный вал 10520 в направлении B и перемещать фиксатор 10526 сдвигателя проксимально. При перемещении фиксатора 10526 сдвигателя проксимально фиксатор 10526 сдвигателя вводит скользящую шестерню 10516 в функциональное взаимодействие с закрывающей шестерней 10532. В этот момент продолжающийся поворот входного вала 10510 в направлении A может передаваться стволу закрытия 10530 посредством зубчатого взаимодействия скользящей шестерни 10516 и закрывающей шестерни 10532. При зубчатом взаимодействии скользящей шестерни 10516 с закрывающей шестерней 10532 поворот входного вала 10510 в направлении A будет поворачивать выходной вал 10530 в направлении C, как показано на ФИГ. 89. Закрывающий привод может дополнительно включать в себя закрывающую гайку 10536, содержащую образованное в ней резьбовое отверстие 10537, которая находится в резьбовом взаимодействии с резьбовым участком 10534 ствола закрытия 10530. Закрывающая гайка 10536 может включать в себя один или более противоповоротных элементов, взаимодействующих с возможностью скольжения с рамой хирургического инструмента, которые, например, могут препятствовать повороту закрывающей гайки 10536 вместе со стволом закрытия 10530 так, что поворотное перемещение ствола закрытия 10530 может преобразоваться в продольное перемещение закрывающей гайки 10536. Закрывающая система может дополнительно включать в себя закрывающий элемент 10538, проходящий от закрывающей гайки 10536, которая может взаимодействовать с упором 10508. При повороте ствола закрытия 10530 в направлении C, как показано на ФИГ. 89, закрывающая гайка 10536 и закрывающий элемент 10538 могут выдвигаться дистально, перемещая упор 10508 в открытое положение.
В дополнение к указанному выше, на ФИГ. 89 отображена трансмиссия 10502 в конфигурации закрытия, то есть в конфигурации, в которой упор 10508 может открываться и закрываться. При зубчатом взаимодействии скользящей шестерни 10516 с закрывающей шестерней 10532 входной вал 10510 будет непосредственно приводить в действие ствол закрытия 10530. Одновременно, входной вал 10510 будет непосредственно приводить в действие промежуточный вал 10520 благодаря зубчатому взаимодействию между входной шестерней 10512 и промежуточной шестерней 10522. Кроме того, при зубчатом взаимодействии скользящей шестерни 10516 с закрывающей шестерней 10532 скользящая шестерня 10516 не имеет зубчатого взаимодействия с пусковой шестерней 10542 и, как таковой, входной вал 10510 не будет приводить в действие пусковой ствол 10540, когда трансмиссия 10502 находится в закрывающей конфигурации.
После перемещения упора 10508 в открытое положение и/или отсоединения от закрывающего элемента 10538, в дополнение к указанному выше, ткань может быть расположена между упором 10508 и кассетой со скобками 10506. Затем, как показано на ФИГ. 90 и 91, упор 10508 может перемещаться в закрытое положение посредством поворота входного вала 10510 в противоположном направлении, то есть в направлении A’, при этом ствол закрытия 10530 будет поворачиваться в противоположном направлении, то есть в направлении C’, перемещая закрывающую гайку 10536, закрывающий элемент 10538 и упор 10508 проксимально. Входной вал 10510 также будет поворачивать промежуточный вал 10520 в противоположном направлении, то есть в направлении B’, при повороте входного вала 10510 в направлении A’. При повороте промежуточного вала 10520 в направлении B’, промежуточный вал 10520 смещает фиксатор 10526 сдвигателя и скользящую шестерню 10516 дистально. Фиксатор 10526 сдвигателя может толкать скользящую шестерню 10516 дистально до высвобождения скользящей шестерни 10516 из зубчатого взаимодействия с закрывающей шестерней 10532 и возвращения скользящей шестерни 10516 в положение холостого хода. Дополнительный поворот промежуточного ствола 10520 в направлении B’ заставляет фиксатор 10526 сдвигателя смещать скользящую шестерню 10516 дистально до введения скользящей шестерни 10516 в зубчатое взаимодействие с пусковой шестерней 10542. В этот момент, как показано на ФИГ. 92 и 93, входной вал 10510 может непосредственно приводить в действие пусковой ствол 10540. Затем, входной вал 10510 может поворачивать пусковой ствол 10540 в направлении D’ при вращении входного вала 10510 в направлении A’. Пусковая система может дополнительно содержать пусковую гайку 10546, включающую в себя резьбовое отверстие 10547, которое находится в резьбовом взаимодействии с резьбовым участком 10544 ствола закрытия 10540. При вращении пускового ствола 10410 в направлении A’ пусковой ствол 10540 может выдвигать пусковую гайку 10546 дистально. Пусковая гайка 10546 может включать в себя один или более противоповоротных элементов, взаимодействующих с возможностью скольжения с рамой хирургического инструмента так, что пусковая гайка 10546 не поворачивается вместе с пусковым стволом 10540, и так, что поворотное перемещение пускового ствола 10540 может преобразоваться в продольное перемещение пусковой гайки 10546. Пусковой привод может дополнительно включать в себя пусковой элемент 10548, проходящий от пусковой гайки 10546 и выдвигающийся дистально для выталкивания скоб из кассеты со скобками 10506. На протяжении всего пускового хода пусковой системы фиксатор 10526 сдвигателя непрерывно выдвигает скользящую шестерню 10516 дистально. Пусковой ход может быть завершен, когда фиксатор 10526 сдвигателя выдвигает скользящую шестерню 10516 дистально в точку, в которой скользящая шестерня 10516 больше не находится в резьбовом взаимодействии с пусковым валом 10542. В этот момент пусковой элемент 10548 может находиться в полностью активированном положении.
В дополнение к указанному выше, на ФИГ. 93 представлена трансмиссия 10502 в пусковой конфигурации, то есть в конфигурации, в которой пусковой элемент 10548 может выдвигаться и втягиваться. При зубчатом взаимодействии скользящей шестерни 10516 с пусковой шестерней 10542 входной вал 10510 будет непосредственно приводить в действие пусковой ствол 10540. Одновременно, входной вал 10510 будет непосредственно приводить в действие промежуточный вал 10520 благодаря зубчатому взаимодействию между входной шестерней 10512 и промежуточной шестерней 10522. Кроме того, при зубчатом взаимодействии скользящей шестерни 10516 с пусковой шестерней 10542 скользящая шестерня 10516 не имеет зубчатого взаимодействия с закрывающей шестерней 10532 и, следовательно, входной вал 10510 не будет приводить в действие ствол закрытия 10530, когда трансмиссия 10502 находится в пусковой конфигурации.
Для втягивания пускового элемента 10548 входной вал 10510 может поворачиваться в направлении A, поворачивая промежуточный ствол 10520 в направлении B, смещая фиксатор 10526 сдвигателя проксимально и повторно вводя скользящую шестерню 10516 во взаимодействие с пусковой шестерней 10542. В этот момент непрерывный поворот входного вала 10510 в направлении A будет поворачивать пусковой ствол 10540 в направлении, противоположном направлению D’, смещение пусковой гайки 10546 проксимально и втягивать пусковой элемент 10548. При повороте пусковой шестерни 10542 посредством скользящей шестерни 10516 фиксатор 10526 сдвигателя продолжает вытягивать скользящую шестерню 10516 проксимально до высвобождения скользящей шестерни 10516 из зубчатого взаимодействия с пусковой шестерней 10542 и достижения скользящей шестерней 10516 положения холостого хода. В этот момент непрерывный поворот входного вала 10510 в направлении A будет продолжать смещение фиксатора 10526 сдвигателя и скользящей шестерни 10516 проксимально и повторное введение скользящей шестерни 10516 во взаимодействие с закрывающей шестерней 10532 для повторного открытия упора 10508.
На ФИГ. 94–98 показан хирургический инструмент 11010, выполненный с возможностью сшивания и/или рассечения ткани. Хирургический инструмент 11010 может включать в себя пистолетную рукоятку 11015. Рукоятка 11015 включает в себя первый участок 11020 рукоятки, образующий продольную ось 11030, от которого могут проходить бранши 11070 и 11090. Рукоятка 11015 включает в себя второй участок рукоятки, то есть захват 11040 рукоятки, образующий ось 11050 второго участка. Ось 11050 второго участка образует угол 11060 с продольной осью 11030. В различных вариантах угол 11060 может представлять собой любой подходящий угол, например, такой как равный приблизительно 120 градусов. Бранша 11070 может содержать канал кассеты, включающий в себя отверстие, выполненное с возможностью извлечения принимать кассету 11080 со скобками. Кассета 11080 со скобками может включать в себя множество скоб, хранящихся с возможностью извлечения в полостях для скоб, расположенных по меньшей мере в два продольных ряда, по одному с каждой стороны канала, по которому продвигается скальпель для рассечения ткани, как подробно описано ниже. По меньшей мере в одном случае три продольных ряда полостей для скоб могут быть расположены на первой стороне канала для скальпеля, притом что три продольных ряда полостей для скоб могут быть расположены на второй стороне канала для скальпеля. Бранша 11090 может содержать упор, выполненный с возможностью поворачиваться в положение, противоположное и соосное с кассетой 11080 со скобками так, что углубления, образованные в упоре 11090 могут принимать и формировать скобки, выталкиваемые из кассеты 11080 со скобками. На ФИГ. 98 представлен упор 11090 в открытом положении, а на ФИГ. 94 представлен упор 11090 в закрытом положении. Хотя это не показано, предусматриваются варианты осуществления, в которых бранша, включающая в себя кассету 11080 со скобками, выполнена с возможностью поворота относительно упора 11090. В любом случае, как будет более подробно описано ниже, рукоятка 11015 может дополнительно включать в себя закрывающую кнопку 11065 (ФИГ. 98), выполненную с возможностью приведения в действие закрывающей системы, которая перемещает упор 11090 между открытым и закрытым положениями, и пусковую кнопку 11055, выполненную с возможностью действия на пусковую систему, которая выталкивает скобки из кассеты 11080 со скобками. Закрывающая кнопка 11065 может быть расположена и сконструирована на рукоятке 11015, например, так, что пользователь может легко дотянуться до нее большим пальцем руки, удерживающей рукоятку 11015, тогда как пусковая кнопка 11055 может быть расположена и выполнена так, что пользователь может легко дотянуться до нее указательным пальцем руки, удерживающей рукоятку 11015.
В дополнение к указанному выше, упор 11090 может перемещаться к кассете 11080 со скобками и от нее во время применения. В различных вариантах закрывающая кнопка 11065 может включать в себя двунаправленный переключатель. При нажатии закрывающей кнопки 11065 в первом направлении закрывающая система хирургического инструмента 11010 может перемещать упор 11090 к кассете 11080 со скобками, и при нажатии закрывающей кнопки 11065 во втором направлении закрывающая система может перемещать упор 11090 от кассеты 11080 со скобками. Как преимущественно показано на ФИГ. 95 и 97, закрывающая система может включать в себя закрывающий двигатель 11110, выполненный с возможностью перемещать упор 11090. Закрывающий двигатель 11110 может включать в себя проходящий от него ствол закрытия 11130, выполненный с возможностью поворота, к которому может быть прикреплена первая закрывающая шестерня 11140. Закрывающий двигатель 11110 может поворачивать ствол закрытия 11130, и ствол закрытия 11130 может поворачивать первую закрывающую шестерню 11140. Первая закрывающая шестерня 11140 может находиться в зубчатом взаимодействии с промежуточной шестерней 11150, которая, в свою очередь, может находиться в зубчатом взаимодействии с приводной шестерней 11160 закрывающего ходового винта. Приводная шестерня 11160 закрывающего ходового винта прикреплена к закрывающему ходовому винту 11170. При повороте первой закрывающей шестерни 11140 посредством ствола закрытия 11130 первая закрывающая шестерня 11140 может поворачивать промежуточную шестерню 11150, промежуточная шестерня 11150 может поворачивать приводную шестерню 11160 закрывающего ходового винта, и приводная шестерня 11160 закрывающего ходового винта может поворачивать закрывающий ходовой винт 11170.
Как преимущественно показано на ФИГ. 97, ствол закрытия 11130, первая закрывающая шестерня 11140, промежуточная шестерня 11150 и приводная шестерня 11160 закрывающего ходового винта могут удерживаться с возможностью поворота на фиксаторе 11125 двигателя, закрепленного внутри участка 11120 рукоятки. Закрывающий ходовой винт 11170 может включать в себя первый конец, который также удерживается с возможностью поворота на фиксаторе 11125 двигателя, и/или второй конец, который удерживается с возможностью поворота на корпусе 11015 рукоятки. Закрывающий ходовой винт 11170 может дополнительно содержать резьбовой участок между первым концом и вторым концом. Закрывающая система может дополнительно содержать закрывающий фиксатор 11175 (ФИГ. 96), который может включать в себя резьбовое отверстие 11176, находящееся в резьбовом взаимодействии с резьбовым участком закрывающего ходового винта 11170. Поворот закрывающего фиксатора 11175 может быть ограничен закрывающим ходовым винтом 11170 так, что при вращении закрывающего ходового винта 11170, закрывающий ходовой винт 11170 может смещать закрывающий фиксатор 11175 проксимально или дистально в зависимости от направления поворота закрывающего ходового винта 11170. Например, при повороте закрывающего ходового винта 11170 в первом направлении закрывающий ходовой винт 11170 может смещать закрывающий фиксатор 11175 дистально, и при повороте закрывающего ходового винта 11170 во втором, или противоположном, направлении закрывающий ходовой винт 11170 может смещать закрывающий фиксатор 11175 проксимально. Как преимущественно показано на ФИГ. 96, закрывающий фиксатор 11175 может быть установлен на элементе фиксатора в форме закрывающего канала 11180, проходящего вдоль внешней стороны канала 11170 кассеты. В различных вариантах закрывающий канал 11180 может быть заключен внутри участка 11120 рукоятки, тогда как в некоторых вариантах закрывающий канал 11180 может выступать из участка 11120 рукоятки. Закрывающий канал 11180 может содержать приблизительно U-образный канал, если смотреть с конца, и может включать в себя противоположные боковые стенки 11182. Каждая боковая стенка 11182 может включать в себя образованный в ней криволинейный паз 11190. Как будет дополнительно подробно описано ниже, криволинейные пазы 11190 могут быть выполнены с возможностью взаимодействия с упором 11090 и перемещения упора 11090 относительно кассеты 11080 со скобками.
В дополнение к указанному выше, закрывающий канал 11180 охватывает канал 11070 кассеты так, что канал 11070 кассеты оказывается вставленным в U-образную форму закрывающего канала 11180. Как преимущественно показано на ФИГ. 96, канал 11070 кассеты может включать в себя удлиненные пазы 11195, образованные в нем, и закрывающий канал 11180 может включать в себя штифты, проходящие вовнутрь в удлиненные пазы 11195. Штифты закрывающего канала и удлиненные пазы 11195 могут ограничивать перемещение закрывающего канала 11180 так, что закрывающий канал 11180 поступательно перемещается относительно канала 11070 кассеты вдоль продольного пути. Поступательное перемещение закрывающего канала 11180 обуславливает поворот упора 11090. Упор 11090 может быть подсоединен к закрывающему каналу 11180 посредством дистального закрывающего штифта 11210, проходящего через криволинейные отверстия 11211 упора, образованные в упоре 11090, и криволинейные пазы 11190, образованные в закрывающем канале 11180. Каждый криволинейный паз 11190 может включать первый, или дистальный, конец 11191 и второй, или проксимальный, конец 11192. Каждый криволинейный паз 11190 может дополнительно включать в себя первую, или проксимальную, выталкивающую поверхность 11193 и вторую, или дистальную, выталкивающую поверхность 11194. Когда закрывающая система находится в открытой конфигурации, и упор 11090 находится в открытом положении, закрывающий канал 11180 может находиться в первом, или невыдвинутом, положении, и дистальный закрывающий штифт 11210 может находиться в первых, или дистальных, концах 11191 криволинейных пазов 11190. При выдвижении закрывающего канала 11180 дистально с целью перемещения упора 11090 к кассете 11080 со скобками первая выталкивающая поверхность 11193 может входить во взаимодействие с дистальным закрывающим штифтом 11210 и толкать дистальный закрывающий штифт 11210 вниз к кассете 11080 со скобками. Когда закрывающая поверхность находится в закрытой конфигурации и упор 11090 находится в закрытом положении противоположно кассете 11080 со скобками, закрывающий канал 11180 может находиться во втором, или полностью выдвинутом, положении, и дистальный закрывающий штифт 11210 может находиться во вторых, проксимальных концах 11192 криволинейных пазов 11190.
Каждый криволинейный паз 11190 может иметь изогнутую, или дугообразную, траекторию. Первая выталкивающая поверхность 11193 может содержать первую дугообразную поверхность, и вторая выталкивающая поверхность 11194 может содержать вторую дугообразную поверхность. В различных вариантах каждый криволинейный паз 11190 может включать в себя по меньшей мере один изогнутый участок и по меньшей мере прямолинейный участок. По меньшей мере в одном случае каждая первая выталкивающая поверхность 11193 может содержать плоскую поверхность на дистальном конце 11191 криволинейного паза 11190. Плоская поверхность может содержать вертикальную поверхность, перпендикулярную, или по меньшей мере по существу перпендикулярную, продольно оси 11030 инструмента 11010. Такая плоская поверхность может выступать в качестве стопора, при этом может потребоваться усилие исходной величины для смещения закрывающего штифта 11210 в дугообразный участок криволинейного паза 11190. В некоторых вариантах каждая первая выталкивающая поверхность 11193 может содержать плоскую поверхность 11196 на проксимальном конце 11192 криволинейного паза 11190. Каждая плоская поверхность 11196 может содержать горизонтальную поверхность, параллельную, или по меньшей мере по существу параллельную, продольной оси 11030. Плоские поверхности 11196 могут обеспечивать большое передаточное отношение между закрывающим каналом 11180 и упором 11090. В различных примерах первые выталкивающие поверхности 11193 могут прилагать незначительное передаточное отношение на закрывающий штифт 11210, когда закрывающий штифт 11210 находится в дистальных концах 11191 пазов 11190; однако при скольжении закрывающего штифта 11210 по криволинейным пазам 11190 к проксимальным концам 11192 передаточное отношение, прикладываемое к закрывающему штифту 11210 первыми сопряженными поверхностями 11193, может увеличиваться. Когда закрывающий штифт 11210 входит в проксимальные концы 11192, передаточное отношение, прикладываемое первыми выталкивающими поверхностями 11193, может достигать максимума и быть определенно больше, чем передаточное отношение, прикладываемое первыми выталкивающими поверхностями 11193, когда закрывающий штифт 11210 находится в дистальных концах 11191 криволинейных пазов 11190. Тем не менее, когда дистальные концы 11191 могут прикладывать меньшее передаточное отношение к закрывающему штифту 11210, дистальные концы 11191 могут быстро смещать закрывающий штифт 11210 относительно кассеты 11080. При выдвижении закрывающего канала 11180 дистально и увеличении передаточного отношения, прикладываемого к закрывающему штифту 11210, как описано выше, первые выталкивающие поверхности 11193 перемещают упор 11090 медленнее при данной скорости закрывающего канала 11180.
Как показано на ФИГ. 96, канал 11070 кассеты может дополнительно включать в себя образованные в нем дистальные закрывающие пазы 11215, которые могут быть выполнены с возможностью принимать дистальный закрывающий штифт 11210 при приближении упора 11090 к закрытому положению. Дистальные закрывающие пазы 11215 являются по существу вертикальными и могут включать в себя открытые концы в верхней части канала 11070 кассеты, а их противоположные концы могут быть закрытыми. Открытые концы пазов 11215 могут быть шире, чем их закрытые концы. В различных вариантах закрывающий штифт 11210 может входить в контакт с закрытыми концами закрывающих пазов 11215 при достижении упором 11090 закрытого положения. В таких вариантах закрытые концы закрывающих пазов 11215 могут останавливать перемещение упора 11090. В некоторых вариантах упор 11090 может входить в контакт с кассетой 11080 со скобками, когда упор 11090 находится в своем закрытом положении. По меньшей мере в одном случае упор 11090 выполнен с возможностью поворота вокруг шарнирного штифта 11200 до вступления дистального конца 11091 упора 11090 в контакт с дистальным концом 11081 кассеты 11080 со скобками. Как показано на ФИГ. 98, дистальный закрывающий штифт 11210, перемещающий упор 11090, расположен дистально относительно шарнирного штифта 11220. Таким образом, закрывающее усилие, прикладываемое к упору 11090 закрывающим приводом, воздействует дистально относительно шарнира, соединяющего упор 11090 с каналом 11070 кассеты с возможностью поворота. Таким образом, открывающие усилие, прикладываемое к упору 11090 закрывающим приводом, прикладывается дистально относительно шарнира, соединяющего упор 11090 с каналом 11070 кассеты с возможностью поворота.
Как сказано выше, рукоятка 11015 может включать в себя закрывающую кнопку 11065, выполненную с возможностью приводить в действие закрывающей системы хирургического инструмента 11010. Перемещение закрывающей кнопки 11065 может обнаруживаться, например, датчиком или переключателем. При нажатии закрывающей кнопки 11065 закрывающий переключатель 11285 может быть активирован, или замкнут, при этом питание направляется к закрывающему двигателю 11110. В таких вариантах переключатель 11285 может замыкать цепь, подающую электропитание на закрывающий двигатель 11110. В различных вариантах хирургический инструмент 11010 может включать в себя, например, микропроцессор. В таких вариантах закрывающий переключатель 11285 может находиться в связи для передачи сигнала с микропроцессором, и, после закрытия закрывающего переключателя 11285 микропроцессор может функционально связывать подачу электропитания на закрывающий двигатель 11110. В любом случае, первая полярность напряжения может прикладываться к закрывающему двигателю 11110 с целью поворота закрывающего выходного ствола 11130 в первом направлении и закрытия упора 11090, и, кроме того, вторая, или противоположная, полярность напряжения может прикладываться к закрывающему двигателю 11110 с целью поворота закрывающего выходного ствола 11130 во втором, или противоположном, направлении и открытия упора 11090.
В различных вариантах хирургический инструмент 11010 может быть выполнен так, что пользователь хирургического инструмента 11010 должен удерживать закрывающую кнопку 11065 во вдавленном состоянии до достижения закрывающим приводом полностью закрытой конфигурации. В случае высвобождения закрывающей кнопки 11065 микропроцессор может остановить закрывающий двигатель 11110. Альтернативно микропроцессор может изменить направление закрывающего двигателя 11110 в случае высвобождения закрывающей кнопки 11065 до перехода закрывающего привода в полностью закрытую конфигурацию. После перехода закрывающего привода в полностью закрытую конфигурацию микропроцессор может остановить закрывающий двигатель 11110. В различных вариантах, как подробно описано ниже, хирургический инструмент 11010 может содержать датчик закрытия 11300 (ФИГ. 96 и 98), выполненный с возможностью обнаруживать достижение закрывающей системой полностью закрытой конфигурации. Датчик закрытия 11300 может быть находиться в связи для передачи сигнала с микропроцессором, который может отсоединять подачу электропитания на закрывающий двигатель 11110 в случае получения микропроцессором от датчика закрытия 11300 сигнала о закрытии упора 11090. В различных вариантах повторное нажатие закрывающей кнопки 11065 после перехода закрывающей системы в закрытую конфигурацию, но перед приведением в действие пусковой системы, может воздействовать на микропроцессор с изменением направления закрывающего двигателя 11110 и повторным открытием упора 11090. В некоторых вариантах микропроцессор может повторно отрыть упор 11090, переведя его в полностью открытое положение, в других вариантах микропроцессор может повторно открыть упор 11090, переведя его в частично открытое положение.
По существу после закрытия упора 11090 пусковая система хирургического инструмента 11010 может быть приведена в действие. Как преимущественно показано на ФИГ. 95 и 97, пусковая система может включать в себя пусковой двигатель 11120. Пусковой двигатель 11120 может быть расположен смежно с закрывающим двигателем 11110. Закрывающий двигатель 11110 может проходить вдоль первой продольной оси двигателя, и пусковой двигатель 11120 может проходить вдоль второй продольной оси двигателя, параллельной, или по существу параллельной, первой оси двигателя. Первая продольная ось двигателя и вторая продольная ось двигателя могут быть параллельны продольной оси 11030 хирургического инструмента 11010. Закрывающий двигатель 11110 может быть расположен на первой стороне продольной оси 11030, а пусковой двигатель 11120 может быть расположен на второй стороне продольной оси 11030. В таких вариантах первая продольная ось двигателя может проходить вдоль первой стороны продольной оси 11030 и вторая продольная ось двигателя может проходить вдоль второй стороны продольной оси 11030. В различных вариантах первая продольная ось двигателя может проходить через центр ствола закрытия 11130. Аналогично указанному выше, пусковой двигатель 11120 может включать в себя проходящий от него поворачиваемый пусковой ствол 11230. Также аналогично указанному выше, вторая продольная ось двигателя может проходить через центр пускового ствола 11230.
В дополнение к описанному выше, первая пусковая шестерня 11240 может быть установлена на пусковом стволе 11230. Первая пусковая шестерня 11240 находится в зубчатом взаимодействии с приводной шестерней 11250 пускового ходового винта, установленной на пусковом ходовом винте 11260. При повороте пускового ствола 11230 посредством двигателя 11120 пусковой ствол 11230 может поворачивать первую пусковую шестерню 11240, первая пусковая шестерня 11240 может поворачивать приводную шестерню 11250 пускового ходового винта, и приводная шестерня 11250 пускового ходового винта может поворачивать пусковой ходовой винт 11260. Как преимущественно показано на ФИГ. 97, пусковой ствол 11230, первая пусковая шестерня 11240, приводная гайка 11250 пускового ходового винта и/или пусковой ходовой винт 11260 могут удерживаться на фиксаторе 11125 двигателя с возможностью поворота. Первая пусковая шестерня 11240 и приводная шестерня 11250 пускового ходового винта могут быть расположены между фиксатором 11125 двигателя и первой пластиной 11126 фиксатора. Первая пластина 11126 фиксатора может быть установлена на фиксаторе 11125 двигателя и может также удерживать с возможностью поворота, пусковой ствол 11230, первую пусковую шестерню 11240, приводную шестерню 11250 пускового ходового винта и/или пусковой ходовой винт 11260. В различных вариантах хирургический инструмент 11010 может дополнительно содержать вторую пластину 11127 фиксатора, которая может быть установлена на первой пластине 11126 фиксатора. Аналогично указанному выше, первая закрывающая шестерня 11140, промежуточная шестерня 11150 и приводная шестерня 11160 закрывающего ходового винта могут быть расположены между первой пластиной 11126 фиксатора и второй пластиной 11127 фиксатора. В различных вариантах первая пластина 11126 фиксатора и/или вторая пластина 11127 фиксатора могут удерживать с возможностью поворота ствол закрытия 11130, первую закрывающую шестерню 11140, промежуточную шестерню 11150, приводную шестерню 11160 закрывающего ходового винта и/или закрывающий ходовой винт 11170.
Конфигурация двигателя и шестерни, описанная выше, позволяет сэкономить пространство внутри рукоятки 11015 хирургического инструмента 11010. Как указано выше и как преимущественно показано на ФИГ. 97, закрывающий двигатель 11110 и пусковой двигатель 11120 расположены на фиксаторе 11125 двигателя. Закрывающий двигатель 11110 расположен на одной стороне с пусковым двигателем 11120, несколько проксимальнее его. Расположение одного двигателя проксимально относительно другого обеспечивает пространство для двух блоков шестерен, причем один блок шестерен расположен за другим блоком шестерен. Например, блок закрывающих шестерен, содержащий первую закрывающую шестерню 11140, закрывающую промежуточную шестерню 11150 и приводную шестерню 11160 закрывающего ходового винта, расположен проксимальнее блока пусковых шестерен, содержащего первую пусковую шестерню 11240 и приводную шестерню 11250 пускового ходового винта. Благодаря тому, что стволы двигателя проходят проксимально от браншей, и основной корпус двигателя проходит дистально к браншам, в рукоятке 11015 образуется пространство и позволяет укоротить рукоятку 11015 за счет параллельного выравнивания основного корпуса двигателей 11110 и 11120 вдоль других частей внутри рукоятки 11015.
В дополнение к указанному выше, конструкция блоков закрывающих и пусковых шестерен также обеспечивает экономию пространства. В варианте осуществления, представленном на ФИГ. 97, закрывающий двигатель 11110 приводит в действие три шестерни, тогда как пусковой двигатель 11120 приводит в действие две шестерни; однако блок закрывающих шестерен и блок пусковых шестерен могут включать в себя любое подходящее число шестерен. Добавление третьей шестерни, то есть закрывающей промежуточной шестерни 11150 в блок закрывающих шестерен обеспечивает смещение закрывающего ходового винта 11170 вниз относительно пускового ходового винта 11260 так, что отдельные ходовые винты могут поворачиваться вокруг различных осей. Кроме того, третья шестерня устраняет необходимость в шестернях с большим диаметром для смещения осей ходовых винтов, таким образом, внешний диаметр пространства, необходимого для блоков шестерен, и объем рукоятки 11015 можно уменьшить.
Как преимущественно показано на ФИГ. 98, закрывающий ходовой винт 11170 может проходить вдоль первой продольной оси ствола, и пусковой ходовой винт 11260 может проходить вдоль второй продольной оси ствола. Первая продольная ось ствола и вторая продольная ось ствола могут быть параллельны продольной оси 11030 хирургического инструмента 11010. Первая продольная ось ствола или вторая продольная ось ствола могут располагаться на одной прямой с продольной осью 11030. В различных вариантах пусковой ходовой винт 11260 может проходить вдоль продольной оси 11030, и вторая продольная ось ствола может располагаться на одной прямой с продольной осью 11030. В таких вариантах, закрывающий ходовой винт 11170 и первая продольная ось ствола могут быть смещены относительно продольной оси 11030.
В дополнение к указанному выше, пусковой ходовой винт 11260 может включать в себя, например, первый конец, удерживаемый с возможностью поворота на фиксаторе 11125 двигателя, второй конец, удерживаемый с возможностью поворота на рукоятке 11015, и резьбовой участок, проходящий между первым концом и вторым концом. Пусковой ходовой винт 11260 может располагаться в U-образной форме канала 11070 кассеты над закрывающим ходовым винтом 11170. Как преимущественно показано на ФИГ. 95, пусковой привод может дополнительно содержать пусковой фиксатор 11265, который может включать в себя резьбовое отверстие 11266, находящееся в резьбовом взаимодействии с резьбовым участком пускового ходового винта 11260. Поворот закрывающего фиксатора 11265 может быть ограничено пусковым ходовым винтом 11260 так, что при повороте пускового ходового винта закрывающий ходовой винт 11260 может поступательно перемещать пусковой фиксатор 11265 проксимально или дистально в зависимости от направления поворота пускового ходового винта 11260 посредством пускового двигателя 11120. Например, при повороте пускового ходового винта 11260 в первом направлении пусковой ходовой винт 11260 может смещать пусковой фиксатор 11265 дистально, и при повороте пускового ходового 11260 во втором направлении пусковой ходовой винт 11260 может смещать пусковой фиксатор 11265 проксимально. Как подробно описано ниже, пусковой фиксатор 11265 может выдвигаться дистально, чтобы выталкивать скобки, хранящиеся с возможностью извлечения в кассете 11080 со скобками, и/или рассекает ткань, зажатую между кассетой 11080 со скобками и упором 11090.
В дополнение к указанному выше, пусковой фиксатор 11265 может быть зафиксирована на фиксаторе 11270 толкателя так, что фиксатор 11270 толкателя поступательно перемещается вместе с пусковым фиксатором 11265. Пусковая система может дополнительно включать в себя пусковые клинья 11280, прикрепленные к и проходящие дистально от фиксатора 11270 толкателя. Каждый из пусковых клиньев 11280 может включать в себя по меньшей мере одну криволинейную поверхность на своем дистальном конце, которая может быть выполнена с возможностью выталкивания скоб из кассеты 11080 со скобками. Пусковая система может дополнительно содержать фиксатор 11281 скальпеля, выполненный с возможностью скольжения вдоль пусковых клиньев 11280. В различных вариантах начальное дистальное перемещение пускового фиксатора 11265 может не передаваться фиксатору 11281 скальпеля; однако при дальнейшем выдвижении пускового фиксатора 11265 дистально фиксатор 11270 толкателя может входить во взаимодействие, например, с фиксатором 11281 скальпеля, и толкать фиксатор 11281 скальпеля и установленный на нем скальпель 11282 дистально. В других вариантах фиксатор 11281 скальпеля может быть установлен на пусковых клиньях 11280 так, что фиксатор 11281 скальпеля и скальпель 11282 перемещаются вместе с пусковыми клиньями 11280 на протяжении всего перемещения пусковых клиньев 11280. Пусковой фиксатор 11265, фиксатор 11270 толкателя, пусковые клинья 11280, фиксатор 11281 скальпеля и скальпель 11282 могут образовывать узел фиксатора толкателя и скальпеля. В любом случае, пусковые клинья 11280 и скальпель 11282 могут перемещаться дистально с целью одновременного выталкивания скоб, хранящихся внутри кассеты 11080 со скобками, и рассечения ткани, зажатой между кассетой 11080 со скобками и упором 11090. Криволинейные поверхности пусковых клиньев 11280 могут быть расположены дистально относительно режущей поверхности скальпеля 11282 так, что сшивание ткани, зажатой между кассетой 11080 со скобками, и упором 11090, скобками может происходить до ее рассечения.
Как указано выше, закрывающая кнопка 11065 при нажатии взаимодействует с закрывающим переключателем 11285 для подачи питания на закрывающий двигатель 11110. Аналогично этому, пусковая кнопка 11055 при нажатии вступает во взаимодействие с пусковым переключателем 11290 для подачи питания на пусковой двигатель 11120. В различных вариантах пусковой переключатель 11290 может замыкать силовую цепь, подающую электропитание на пусковой двигатель 11120. В некоторых вариантах пусковой переключатель 11290 может быть находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 11010, и после закрытия пускового переключателя 11290 микропроцессор может функционально подключать подачу электропитания к пусковому двигателю 11120. В любом случае первая полярность напряжения может прикладываться к пусковому двигателю 11120 с целью поворота пускового выходного ствола 11230 в первом направлении и выдвижения пускового узла дистально, и вторая, или противоположная, полярность напряжения может прикладываться к пусковому двигателю 11120 с целью поворота пускового выходного ствола 11230 во втором, или противоположном, направлении и втягивания пускового узла. В различных вариантах пусковая кнопка 11055 может включать в себя двунаправленный переключатель, выполненный с возможностью приводить в действие пусковой двигатель 11120 в первом направлении при нажатии пусковой кнопки 11055 в первом направлении, и во втором направлении при нажатии пусковой кнопки 11055 во втором направлении.
Как указано выше, пусковая система может быть активирована после достаточного закрытия упора 11090 посредством закрывающей системы. В различных вариантах упор 11090 может быть достаточно закрыт при достижении им полностью закрытого положения. Хирургический инструмент 11010 может быть выполнен с возможностью обнаруживать достижение упором 11090 полностью закрытого положения. Как преимущественно показано на ФИГ. 98, хирургический инструмент 11010 может включать в себя датчик закрытия 11300, выполненный с возможностью обнаруживать достижение закрывающим каналом 11180 конца закрывающего хода, и, таким образом, обнаруживать нахождение упора 11090 в закрытом положении. Датчик закрытия 11300 может быть расположен на дистальном конце закрывающего ходового винта 11170 или смежно с ним. По меньшей мере в одном варианте датчик закрытия 11300 может содержать датчик приближения, выполненный с возможностью воспринимать приближение и/или соприкосновение закрывающего канала 11180 с датчиком закрытия 11300. Аналогично указанному выше, датчик закрытия 11300 может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 11010. После приема микропроцессором сигнала от датчика закрытия 11300 о том, что закрывающий канал 11180 достиг полностью выдвинутого положения, и упор 11090 находится в закрытом положении, микропроцессор может разрешить активирование пусковой системы. Кроме того, микропроцессор может не допускать активирования пусковой системы до тех пор, пока микропроцессор не примет такой сигнал от датчика 11300 закрытия. В таких вариантах микропроцессор может избирательно подавать питание от источника питания на пусковой двигатель 11120, или избирательно управлять питанием, подаваемым на пусковой двигатель 11120, на основе входного сигнала от датчика 11300 закрытия. И наконец, во всех вариантах осуществления пусковой переключатель 11290 не может инициировать пусковой ход до закрытия инструмента.
Предусмотрены некоторые варианты осуществления, в которых пусковая система хирургического инструмента 11010 может быть приведена в действие, даже если закрывающая система находится в частично закрытой конфигурации, и упор 11090 находится в частично закрытом положении. По меньшей мере в одном варианте осуществления пусковой узел хирургического инструмента 11010 может быть выполнен с возможностью взаимодействия с упором 11090 и перемещения упора 11090 в полностью закрытое положение при выдвижении пускового узла дистально с целью выталкивания скоб, хранящихся в кассете 11080 со скобками. Например, скальпель 11282 может включать в себя кулачковый элемент, выполненный с возможностью взаимодействия с упором 11090 при выдвижении скальпеля 11282 дистально, в результате чего упор 11090 перемещается в полностью закрытое положение. Скальпель 11282 также может включать в себя второй кулачковый элемент, выполненный с возможностью взаимодействия с каналом 11070 кассеты. Кулачковые элементы могут быть выполнены с возможностью устанавливать упор 11090 относительно кассеты 11080 со скобками и задавать размер зазора для ткани между ними. По меньшей мере в одном случае скальпель 11282 может содержать двутавровый профиль, смещенный дистально для задания зазора для ткани, выталкивания скоб из кассеты 11080 со скобками и рассечения ткани.
Хирургический инструмент 11010 может включать в себя датчик, выполненный с возможностью обнаруживать завершение пусковой системой пускового хода. По меньшей мере в одном случае хирургический инструмент 11010 может включать в себя датчик, например, такой как энкодер, который может быть выполнен с возможностью регистрации и подсчета числа поворотов пускового ходового винта 11260. Такой датчик может находиться в связи с микропроцессором хирургического инструмента 11010 для передачи сигнала. Микропроцессор может быть выполнен с возможностью подсчета числа поворотов пускового ходового винта 11260 и после совершения пусковым ходовым винтом 11260 числа оборотов, достаточного для выталкивания всех скоб из кассеты 11080 со скобками, микропроцессор может приостановить подачу питания на пусковой двигатель 11120 для установки пускового ходового винта 11260. В некоторых вариантах микропроцессор может менять полярность напряжения, прикладываемого к пусковому двигателю 11120, для автоматического втягивания пускового узла после выталкивания всех скоб пусковым узлом.
Как указано выше, хирургический инструмент 11010 может включать в себя источник питания. Источник питания может включать в себя источник питания, расположенный вне рукоятки 11015, и кабель, который может, например, проходить в рукоятку 11015. Источник питания может включать в себя по меньшей мере одну батарею, содержащуюся в рукоятке 11015. Батарея может быть расположена в первом участке 11020 рукоятки и/или в захвате 11040 рукоятки. Предполагается, что батареи, шестерни, двигатели и вращающиеся стволы могут быть объединены в один узел, выполненный с возможностью отделения от остальной рукоятки 11015. Такой блок может быть выполнен с возможностью очистки и стерилизации.
В различных вариантах хирургический инструмент 11010 может включать в себя один или более индикаторов, выполненных с возможностью указания состояния хирургического инструмента 11010. По меньшей мере в одном таком варианте осуществления хирургический инструмент 11010 может включать в себя, например, светодиод 11100. Для передачи сигнала о состоянии хирургического инструмента пользователю светодиод 11100 может светиться различными цветами во время различных рабочих состояний хирургического инструмента 11010. Например, светодиод 11100 может светиться первым цветом при подаче питания на хирургический инструмент 11010 и отсутствии неиспользованной кассеты 11080 со скобками в канале 11070 кассеты. Хирургический инструмент 11010 может включать в себя один или более датчиков, выполненных с возможностью обнаруживать наличие кассеты 11080 со скобками в канале 11070 кассеты и выталкивания скоб из кассеты 11080 со скобками. Светодиод 11100 может светиться вторым цветом при подаче питания на хирургический инструмент 11010 и расположения неизрасходованной кассеты 11080 со скобками в канале 11070 кассеты. Светодиод 11010 может светиться третьим цветом при подаче питания на инструмент 11010, загрузке неизрасходованной кассеты 11080 со скобками в канал 11070 кассеты и нахождении упора 11090 в закрытом положении. Такой третий цвет может указывать на то, что хирургический инструмент 11010 готов к активации скоб из кассеты 11080 со скобками. Светодиод 11100 может светиться четвертым цветом после начала пускового процесса. Светодиод может светиться пятым цветом после завершения пускового процесса. Это только один пример осуществления. Любое подходящее количество цветов может применяться для указания любого подходящего числа состояний хирургического инструмента 11010. Помимо применения одного или более светодиодов для передачи сигнала о состоянии хирургического инструмента допускается применение других индикаторов.
В процессе применения пользователь хирургического инструмента 11010 может сначала загрузить кассету 11080 со скобками в хирургический инструмент 11010, поместив кассету 11080 со скобками в канал 11070 кассеты. Загрузка кассеты 11080 в канал 11070 кассеты может вызвать изменение цвета светодиода 11100 с первого цвета на второй цвет. Пользователь может ухватиться за захват 11040 рукоятки и при помощи большого пальца руки активировать закрывающий переключатель 11065, чтобы открыть упор 11090 хирургического инструмента 11010 с целью размещения кассеты 11080 со скобками внутри канала 11070 кассеты. Затем пользователь может установить кассету 11080 со скобками с одной стороны ткани, требующей сшивания скобками и рассечения, и упор 11090 с противоположной стороны ткани. Удерживая закрывающую кнопку 11065 большим пальцем руки, пользователь может закрыть хирургический инструмент 11010. Высвобождение закрывающей кнопки 11065 до завершения закрывающего хода может привести к повторному открытию упора 11090 и позволить пользователю. При необходимости, переместить хирургический инструмент 11010. Пользователь обладает преимуществом использования открытого линейного режущего инструмента с выполненными с возможностью поворота браншами без необходимости сборки частей линейного режущего инструмента. Пользователь может дополнительно использовать преимущества пистолетной рукоятки.
При перемещении упора 11090 в полностью закрытое положение закрывающий канал 11080 может входить в контакт с датчиком 11300 закрытия, и датчик 11300 закрытия может передавать микропроцессору сигнал о необходимости приведения в действие пускового переключателя 11290. В этот момент светодиод 11100 может светиться третьим цветом, указывая на то, что хирургический инструмент 11010 заряжен, закрыт и готов к пуску. Затем, пользователь может нажать пусковую кнопку 11055, которая взаимодействует с пусковым переключателем 11290 и воздействует пусковой переключатель 11290 с подачей питания на пусковой двигатель 11120. При подаче питания пусковой двигатель 11120 поворачивает пусковой ствол 11230, который, в свою очередь, вращает первую пусковую шестерню 11240 и приводную шестерню 11250 пускового ходового винта. Приводная шестерня пускового ходового винта 11250 поворачивает пусковой ходовой винт 11260. Резьба пускового ходового винта 11260 взаимодействует и прикладывает усилие к внутренней резьбе, образованной в пусковом фиксаторе 11265, для перемещения пускового фиксатора 11265 дистально. Пусковой фиксатор 11265 перемещает фиксатор 11270 толкателя дистально, отводя пусковые клинья 11280 дистально. Криволинейные поверхности 11305 на дистальном конце пусковых клиньев 11280 поднимают скобки, хранящиеся в кассете со скобками 11080, к упору 11090, и упор 11090 может формировать скобки, закрепляя ткань. Фиксатор 11270 толкателя взаимодействует с блоком 11281 скальпеля для проталкивания фиксатора 11281 скальпеля и скальпеля 11282 дистально для рассечения сшитой скобками ткани. После завершения пускового хода направление поворота пускового двигателя 11120 может быть изменено на обратное с целью возвращения фиксатора 11270 толкателя, фиксатора 11281 скальпеля, пусковых клиньев 11280 и скальпеля 11282 в исходное состояние. Хирургический инструмент 11010 может включать в себя кнопку и/или переключатель, автоматически дающий команду микропроцессору втягивать пусковой узел, даже если пусковой ход еще не завершен. В некоторых вариантах пусковой узел может быть выполнен без возможности втягивания. В любом случае пользователь может открыть хирургический инструмент 11010 путем нажатия закрывающей кнопки 11065. Закрывающая кнопка 11065 может взаимодействовать с закрывающим переключателем 11285 и подавать питание на закрывающий двигатель 11110. Закрывающий двигатель 11110 может работать в обратном направлении для втягивания закрывающего канала 11180 проксимально с целью повторного открытия упора 11090 хирургического инструмента 11010. Светодиод 11100 может светиться четвертым цветом, указывающим на то, что кассета использована и процедура завершена.
Хирургический сшивающий инструмент 12010 показан на ФИГ. 99–106. Инструмент 12010 может включать в себя рукоятку 12015, закрывающий привод, содержащий фиксатор 12050 закрытия, выполненный с возможностью сжимать ткань между кассетой 12080 со скобками и упором 12090, и пусковой привод, выполненный с возможностью выталкивать скобки из кассеты 12080 со скобками и рассекать ткань. На ФИГ. 99 отображен инструмент 12010 в открытом, разблокированном состоянии. Когда инструмент 12010 находится в открытом, разблокированном состоянии, упор 12090 вращается от кассеты 12080 со скобками. В различных вариантах упор 12090 может вращаться относительно кассеты 12080 со скобками в широкоугольном диапазоне так, что упор 12090 и кассета 12080 со скобками легко могут быть установлены на противоположных сторонах ткани. На ФИГ. 100 отображен инструмент 12010 в закрытом, разблокированном состоянии. Когда инструмент 12010 находится в закрытом, разблокированном состоянии, упор 12090 поворачивается к кассете 12080 со скобками в закрытое положение напротив кассеты 12080 со скобками. В различных вариантах закрытое положение упора 12090 может зависеть от толщины ткани, расположенной между упором 12090 и кассетой 12080 со скобками. Например, упор 12090 может достигать закрытого положения дальше от кассеты 12080 со скобками, в случае когда ткань, расположенная между упором 12090 и кассетой 12080 со скобками, толще по сравнению с теми случаями, когда ткань тоньше. На ФИГ. 101 отображен инструмент 12010 в закрытом, заблокированном состоянии. Когда инструмент 12010 в закрытом, заблокированном состоянии, фиксатор 12050 закрытия взаимодействует с упором 12090, и фиксирует положение упора 12090 относительно кассеты 12080 со скобками. В этот момент, как подробно описано ниже, пусковой привод хирургического инструмента 12010 может быть активирован с целью выталкивания скоб из кассеты 12080 со скобками и рассечения ткани.
Как показано преимущественно на ФИГ. 106, хирургический инструмент 12010 может включать раму 12020, направленную от рукоятки 12015. Рама 12020 может включать в себя канал 12022 рамы, образованный в ней и выполненный с возможностью принимать и/или удерживать канал 12070 кассеты. Канал 12070 кассеты может включать проксимальный конец и дистальный конец. Проксимальный конец канала 12070 кассеты может быть подсоединен к раме 12020. Дистальный конец канала 12070 кассеты может быть выполнен с возможностью извлечения принимать кассету 12080. Канал 12022 рамы может включать в себя шарнирные отверстия 12207, образованные на его противоположных сторонах. Шарнирный штифт 12205 может удерживаться в шарнирных отверстиях 12207 и может проходить между сторонами канала 12022. Фиксатор 12050 закрытия может включать в себя раму 12051 фиксатора, содержащую планки 12052 фиксатора. Планки 12052 фиксатора могут быть установлены с возможностью поворота на раму 12020 при помощи шарнирного штифта 12205, который может проходить через шарнирные отверстия 12206, образованные в планках 12052 фиксатора. В различных вариантах шарнирные отверстия 12206, 12207 и шарнирный штифт 12205 могут образовывать неподвижную ось 12208, вокруг которой может поворачиваться фиксатор 12050 закрытия. Фиксатор 12050 закрытия может дополнительно включать в себя корпус 12057 фиксатора, установленный на планки 12052 фиксатора. При перемещении корпуса 12057 фиксатора пользователем хирургического инструмента 12010 корпус 12057 фиксатора может перемещать планки 12052 фиксатора. Эксплуатация фиксатора 12050 закрытия подробно описана ниже.
В дополнение к указанному выше упор 12090 может включать в себя проксимальный конец и дистальный конец. Дистальный конец упора 12090 может включать в себя множество углублений для формирования скоб, выполненных с возможностью выравнивания или совмещения с полостями для скоб, образованными в кассете 12080 для скоб, когда упор 12090 в закрытом положении. Проксимальный конец упора 12090 может быть подсоединен к раме 12020 с возможностью поворота. Упор 12090 может включать в себя шарнирное отверстие 12201, которое может быть выравнено с шарнирными отверстиями 12202, образованными в канале 12207 кассеты, и шарнирным отверстием 12203, образованным в раме 12020. Шарнирный штифт 12200 может проходить через шарнирные отверстия 12201, 12202 и 12203 и может соединять с возможностью поворота упор 12090 с каналом 12207 кассеты. В различных вариантах шарнирные отверстия 12201, 12202 и 12203 и шарнирный штифт 12200 могут образовывать неподвижную ось, вокруг которой может поворачиваться упор 12090. В некоторых вариантах шарнирные отверстия 12201, 12202 и/или 12203 могут быть продольно вытянутыми, например, так, что шарнирный штифт 12200 может скользить в шарнирных отверстиях 12201, 12202 и/или 12203. В таких вариантах упор 12090 может поворачиваться вокруг оси относительно канала 12070 кассеты, и, кроме того, поступательно перемещаться относительно канала 12070 кассеты. Упор 12090 может дополнительно включать в себя установленный на него корпус 12097 упора. При перемещении корпуса 12097 упора пользователем хирургического инструмента 12010 корпус 12097 упора может перемещать упор 12090 так, что упор 12090 может поворачиваться между открытым положением (ФИГ. 99) и закрытым положением (ФИГ. 100).
В дополнение к указанному выше, упор 12090 может дополнительно включать в себя защелкивающий штифт 12210. Упор 12090 может включать в себя отверстия 12211 защелкивающего штифта, и корпус 12097 упора может включать в себя отверстия 12212 защелкивающего штифта, выполненные с возможностью принимать и удерживать защелкивающий штифт 12210. После перемещения упора 12090 в закрытое положение или положение, смежное с закрытым положением, защелка 12050 может взаимодействовать с защелкивающим штифтом 12210 и вытягивать упор 12090 к кассете 12080 со скобками. В различных вариантах каждая планка 12052 защелки 12050 может включать в себя плечо 12053 защелки, выполненное с возможностью взаимодействия с защелкивающим штифтом 12210. Защелка 12050 может поворачиваться между разблокированным положением (ФИГ. 100), в котором плечи 12053 защелки не взаимодействуют с защелкивающим штифтом 12210, и заблокированным положением (ФИГ. 101). При перемещении защелки 12050 между разблокированным положением и заблокированным положением рычаги 12053 защелки могут взаимодействовать с защелкивающим штифтом 12210 и перемещать упор 12090 к кассете 12080 со скобками. Каждое плечо 12053 защелки может включать в себя криволинейную поверхность, выполненную с возможностью контакта с защелкивающим штифтом 12210. Криволинейные поверхности могут быть выполнены с возможностью толкать и направлять защелкивающий штифт 12210 к кассете 12080 со скобками. При достижении защелкой 12050 заблокированного положения защелкивающий штифт 12210 оказывается захваченным в пазах 12054 защелки, образованных в планках 12052 защелки. Пазы 12054 защелки могут быть по меньшей мере частично образованы плечами 12053 защелки. Противоположные стороны пазов 12054 защелки могут включать в себя несущие поверхности, которые могут быть выполнены с возможностью взаимодействия с защелкивающим штифтом 12210 и подъема упора 12090 от кассеты 12080 со скобками при повороте защелки 12050 между заблокированным положением и разблокированным положением с целью открытия инструмента 12010, как дополнительно подробно описано ниже.
Как указано выше, упор 12090 может быть перемещен к кассете 12080 со скобками. В различных вариантах перемещение упора 12090 к кассете 12080 со скобками может быть остановлено, когда дистальный конец упора 12090 вступает в контакт с дистальным концом кассеты 12080 со скобками. В некоторых вариантах перемещение упора 12090 может быть остановлено при соприкосновении защелкивающего штифта 12210 с каналом 12070 кассеты. Канал 12070 кассеты может включать в себя образованные в нем пазы 12215, выполненные с возможностью принимать защелкивающий штифт 12210. Каждый паз 12215 может включать в себя обращенный вверх открытый конец, через который защелкивающий штифт 12210 может входить в паз 12215, и, кроме того, закрытый конец. В различных вариантах защелкивающий штифт 12210 может входить в контакт с закрытыми концами пазов 12215 при достижении упором 12090 закрытого положения. В некоторых вариантах защелкивающий штифт 12210 может не входить в контакт с закрытыми концами пазов 12215, если между упором 12090 и кассетой 12080 со скобками располагается толстая ткань. По меньшей мере в одном варианте упор 12090 может дополнительно включать в себя ограничительный штифт 12095. Ограничительный штифт 12095 может быть установлен и может удерживаться на упоре 12090 посредством образованных в нем отверстий 12096 для штифта. Ограничительный штифт 12095 может быть выполнен с возможностью входить в контакт с каналом 12070 кассеты и останавливать перемещение упора 12090 к кассете 12080 со скобками. Аналогично указанному выше, канал 12070 кассеты может дополнительно включать в себя образованные в нем ограничительные отверстия 12075, которые могут быть выполнены с возможностью принимать ограничительный штифт 12095. Каждый ограничительный паз 12075 может включать в себя обращенный вверх открытый конец, через который ограничительный штифт 12095 может заходить в ограничительный паз 12275, и, кроме того, закрытый конец. В различных вариантах ограничительный штифт 12095 может входить в контакт с закрытыми концами ограничительных пазов 12075 при достижении упором 12090 закрытого положения. В некоторых вариантах ограничительный штифт 12095 может не входить в контакт с закрытыми концами ограничительных пазов 12075, если между упором 12090 и кассетой 12080 со скобками располагается толстая ткань.
Как указано выше, канал 12070 кассеты может быть установлен на раме 12020. В различных вариантах канал 12070 кассеты может быть жестко и неподвижно установлен на раме 12020. В таких вариантах канал 12070 кассеты может не быть выполнен без возможности перемещения относительно рамы 12020 и/или рукоятки 12015. В некоторых вариантах канал 12070 кассеты может быть соединен с рамой 12020 с возможностью поворота. По меньшей мере в одном таком варианте канал 12070 кассеты может включать образованные в нем шарнирные отверстия 12202, которые могут быть выполнены с возможностью принимать шарнирный штифт 12200. В таких обстоятельствах как упор 12090, так и канал 12070 кассеты могут быть выполнены с возможностью поворота относительно рамы 12020 вокруг шарнирного штифта 12200. Защелка 12050 может удерживать упор 12090 и канал 12070 кассеты на месте при взаимодействии защелки 12050 с защелкивающим штифтом 12210.
В некоторых вариантах, в дополнение к указанному выше, инструмент 12010 может включать в себя один или более датчиков, выполненных с возможностью обнаруживать нахождение упора 12090 в закрытом положении. По меньшей мере в одном варианте инструмент 12010 может включать в себя датчик давления, расположенный между рамой 12020 и каналом 12070 кассеты. Датчик давления может быть установлен, например, на канале 12022 рамы или дне канала 12070 кассеты. Если датчик давления установлен на дне канала 12070 кассеты, датчик давления может входить в контакт с каналом 12022 рамы при перемещении канала 12070 кассеты к каналу 12022 рамы. Канал 12070 кассеты может перемещаться к каналу 12022 рамы, если канал 12070 кассеты выполнен с возможностью поворота относительно канала 12022 рамы, как указано выше. Кроме этого или вместо указанного выше, канал 12070 кассеты может перемещаться к каналу 12022 рамы, если канал 12070 кассеты сгибается к каналу 12022 рамы. Канал 12070 кассеты может сгибаться к каналу 12022 рамы при возникновении сжимающей нагрузки между упором 12090 и каналом 12070 кассеты. Сжимающая нагрузка между упором 12090 и каналом 12070 кассеты может возникнуть при перемещении упора 12090 в закрытое положение и/или при перемещении упора 12090 к каналу 12070 кассеты посредством защелки 12050. При проталкивании упора 12090 к каналу 12070 кассеты и/или при применении фиксатора 12050 для вытягивания упора 12090 к каналу 12070 кассеты канал 12070 кассеты может упираться в шарнирный штифт 12205. В различных вариантах канал 12070 кассеты может включать в себя образованный в нем паз или желоб 12209, который может быть выполнен с возможностью принимать шарнирный штифт 12205. В любом случае, датчик давления может быть выполнен с возможностью обнаруживать давление или усилие, прикладываемое к каналу 12070 кассеты. Датчик давления может находиться в связи с микропроцессором хирургического инструмента 12010 для передачи сигнала. Если давление или усилие, обнаруживаемое датчиком давления, превышает пороговое значение, микропроцессор может разрешить активирование пусковой системы инструмента 12010 для приведения в действие. Перед тем как давление или усилие превысит пороговое значение, микропроцессор может предупредить пользователя хирургического инструмента 12010 о том, что упор 12090 не может быть закрыт, или по в достаточной мере закрыт, при попытке пользователя привести в действие пусковую систему. Кроме этого или вместо предупреждения микропроцессор может препятствовать приведению в действие пусковой системы инструмента 12010, если давление или усилие, обнаруживаемое датчиком давления, не превышает порогового значения.
В некоторых вариантах, в дополнение к указанному выше, инструмент 12010 может включать в себя один или более датчиков, выполненных с возможностью обнаруживать, находится ли защелка 12050 в заблокированном положении. По меньшей мере в одном варианте инструмент 12010 может включать в себя датчик 12025, расположенный между рамой 12020 и каналом 12070 кассеты. Датчик 12025 может быть установлен, например, на канале 12022 рамы или на дне канала 12070 кассеты. Если датчик 12025 установлен на дне канала 12070 кассеты, защелка 12050 может взаимодействовать с датчиком 12025 при перемещении защелки 12050 из разблокированного положения в заблокированное положение. Датчик 12025 может находиться в связи с микропроцессором хирургического инструмента 12010 для передачи сигнала. При обнаружении датчиком 12025 того, что защелка 12050 находится в заблокированном положении, микропроцессор может разрешить приведение в действие пусковой системы инструмента 12010. Перед тем как датчик 12025 обнаруживает, что защелка 12050 находится в заблокированном положении, микропроцессор может предупреждать пользователя хирургического инструмента 12010 о том, что упор 12090 не может быть закрыт, или в достаточной мере закрыт, при попытке пользователя привести в действие пусковую систему. Кроме этого или вместо такого предупреждения микропроцессор может предотвращать приведение в действие пусковой системы инструмента 12010, если защелка 12050 не обнаруживается в заблокированном положении. В различных вариантах датчик 12025 может представлять собой, например, датчик ближней локации. В конкретных вариантах датчик 12025 может представлять собой, например, датчик Холла. По меньшей мере в одном таком варианте защелка 12050 может включать в себя по меньшей мере один магнитный элемент, например, такой как постоянный магнит, который может обнаруживаться датчиком Холла. В различных вариантах для фиксации датчика 12025 может применяться, например, кронштейн 12026.
Как показано преимущественно на ФИГ. 105, пусковая система хирургического инструмента 12010 может включать в себя пусковой двигатель 12120, выполненный с возможностью поворота пускового ствола 12230. Пусковой двигатель 12120 может быть установлен на раме 12125 двигателя внутри рукоятки 12015 хирургического инструмента 12010 так, что пусковой ствол 12230 проходит дистально. Пусковая система может дополнительно содержать фиксатор шестерен, включающий в себя, во-первых, первую пусковую шестерню 12240, установленную на закрывающем стволе 12230, и, во-вторых, шестерню 12250 ходового винта, установленную на ходовом винте 12260. Первая пусковая шестерня 12240 может находиться в зубчатом взаимодействии с шестерней 12250 ходового винта так, что при вращении первой пусковой шестерни 12240 посредством пускового ствола 12230 первая пусковая шестерня 12240 может поворачивать шестерню 12250 ходового винта, и шестерня 12250 ходового винта может поворачивать ходовой винт 12260. Как преимущественно показано на ФИГ. 104, ходовой винт 12260 может содержать первый конец 12261, установленный с возможностью поворота 12250 в отверстии, образованном в фиксаторе 12125 двигателя, и второй конец 12263, удерживаемый с возможностью поворота в подшипнике, установленном на участке 12264 подшипника рукоятки 12015. Ходовой винт 12260 может дополнительно включать в себя резьбовой участок 12262, проходящий между первым концом 12261 и вторым концом 12263. Пусковая система может дополнительно содержать пусковую гайку 12265, находящуюся в резьбовом взаимодействии с резьбовым участком 12262 ходового винта 12260. Вращение пусковой гайки 12265 может быть ограничено ходовым винтом 12260 так, что при повороте ходового винта 12260 в первом направлении посредством пускового двигателя 12120 ходовой винт 12260 может выдвигать пусковую гайку 12265 дистально и, соответственно, при повороте ходового винта 12260 во втором, или противоположном, направлении посредством пускового двигателя 12120 ходовой винт 12260 может втягивать пусковую гайку 12265 проксимально.
В дополнение к указанному выше, пусковая гайка 12265 может быть установлена на пусковой фиксатор 12270, который может поступательно перемещаться с пусковой гайкой 12265. В различных вариантах пусковая гайка 12265 и пусковой фиксатор 12270 могут представлять собой единое целое. Аналогично указанному выше, пусковая система может дополнительно включать в себя проходящие от нее пусковые штанги 12280, поступательно перемещающиеся вместе с пусковой гайкой 12265 и пусковым блоком 12270. В различных вариантах пусковая гайка 12265, пусковой фиксатор 12270 и пусковые штанги 12280 могут образовывать пусковой узел, поступательно перемещаемый проксимально и/или дистально посредством ходового винта 12160. При выдвижении пускового узла дистально посредством ходового винта 12260 пусковые штанги 12280 могут заходить в кассету 12080 со скобками и выталкивать скобки из нее. Пусковая система может дополнительно содержать фиксатор 12281 скальпеля и установленный на нем держатель 12282 скальпеля, проходящий от фиксатора 12281 скальпеля. При выдвижении пускового фиксатора 12270 дистально пусковые штанги 12280 могут взаимодействовать с фиксатором 12281 скальпеля и выдвигать фиксатор 12281 скальпеля и держатель 12282 скальпеля дистально. В различных вариантах пусковой фиксатор 12270 может перемещаться относительно фиксатора 12281 скальпеля на начальном этапе пускового хода и затем перемещаться вместе с ним на заключительном этапе пускового хода. По меньшей мере в одном таком случае пусковые штанги 12280 могут скользить через пазы, образованные в фиксаторе 12281 скальпеля, до тех пор, пока одна или более рельефных поверхностей, проходящих от пусковых штанг 12280, не вступит в контакт с блоком 12281 скальпеля и не протолкнет фиксатор 12281 скальпеля дистально с пусковыми штангами 12280. В различных вариантах пусковой узел может дополнительно включать в себя фиксатор 12281 скальпеля и держатель 12282 скальпеля, которые могут перемещаться одновременно с пусковым фиксатором 12270 и пусковыми штангами 12280. В любом случае, при выдвижении держателя 12282 скальпеля дистально режущий край 12283 держателя 12282 скальпеля может рассекать ткань, зажатую между упором 12090 и кассетой 12080 со скобками. Содержание патента США № 4,633,874, озаглавленного «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С МЕХАНИЗМОМ БЛОКИРОВКИ БРАНШИ И ОДНОРАЗОВЫМ ДОЗАТОРОМ», выданного 6 января 1987 г., в полном объеме включен в настоящий документ путем ссылки.
Как показано преимущественно на ФИГ. 106, пусковая система хирургического инструмента 12010 может включать в себя пусковую кнопку 12055 и пусковой переключатель 12290. Когда пользователь хирургического инструмента 12010 нажимает кнопку пуска 12055, кнопка пуска 12055 может входить в контакт с пусковым переключателем 12290 и замыкать пусковую схему, которая может приводить в действие пусковой двигатель 12120. Когда пользователь хирургического инструмента 12010 отпускает пусковую кнопку 12055, пусковая схема может размыкаться и подача питания на пусковой двигатель 12120 может прекращаться. Пусковую кнопку 12055 можно нажать повторно, снова приводя в действие пусковой двигатель 12120. В некоторых вариантах пусковая кнопка 12055 может иметь двухходовой переключатель, который при нажатии в первом направлении может приводить в действие пусковой двигатель 12120 в первом направлении, а при нажатии во втором направлении может приводить в действие пусковой двигатель 12120 во втором, или противоположном направлении. Пусковой переключатель 12090 и/или любая подходящая конструкция пусковых переключателей может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 12010, который может быть выполнен с возможностью управления подачей питания на пусковой двигатель 12120. В некоторых вариантах в дополнение к указанному выше микропроцессор может игнорировать сигналы от пусковой кнопки 12055 до тех пор, пока датчик 12025 не обнаружит, что защелка 12050 закрыта. В любом случае пусковую кнопку 12055 можно нажать в первом направлении для выдвигания пусковых штанг 12280 и скальпеля 12282 дистально, и можно нажать во втором направлении для втягивания пусковых штанг 12280 и скальпеля 12282 проксимально. В некоторых вариантах осуществления хирургический инструмент 12010 может включать в себя пусковую кнопку и переключатель, выполненные с возможностью приведения в действие пускового двигателя 12120 в первом направлении, и втягивающую кнопку и переключатель, выполненные с возможностью приведения в действие пускового двигателя 12120 во втором направлении. После втягивания пусковых штанг 12280 и скальпеля 12282 защелку 12050 можно переместить из зафиксированного положения в незафиксированное положение, высвобождая плечи 12053 защелки от штифта 12210 защелки. Далее упор 12090 может вращаться от кассеты 12080 со скобками и возвращать хирургический инструмент 12010 в открытое, незафиксированное состояние. Аналогично указанному выше, хирургический инструмент 12010 может включать в себя один или несколько индикаторов, таких как, например, светодиод 12100, выполненный с возможностью указания статуса хирургического инструмента 12010. Светодиод 12100 может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 12010, и может работать подобно тому, как описано, например, применительно к светодиоду 11100. Светодиод 12100 может удерживаться на месте, например, посредством кронштейна 12101.
В различных вариантах инструмент 12010 может включать в себя систему пусковой блокировки, которая может блокировать выдвижение скальпеля 12282 и/или пусковых штанг 12280, если упор 12090 не находится в закрытом или в достаточной мере закрытом положении. Как показано на ФИГ. 104 и 106, инструмент 12010 может содержать смещающий элемент 12400 установленный, например, на канале 12070 кассеты и способный смещать скальпель 12282 во взаимодействие с фиксирующим участком рукоятки 12015. При повороте упора 12090 в закрытое положение, упор 12090 может толкать скальпель 12282 вниз от фиксирующего участка, против действия смещающей силы смещающего элемента 12400. В этот момент скальпель 12282 можно выдвинуть дистально. Аналогично, инструмент 12010 может включать в себя смещающий элемент, способный смещать пусковые штанги 12280 во взаимодействие с фиксирующим участком рукоятки 12015, причем упор 12090 может высвобождать пусковые штанги 12280 от фиксирующего участка при перемещении упора 12090 в закрытое положение.
Хирургический инструмент 12010 может содержать закрывающую систему с ручным приводом и пусковую систему сшивания скобками с приводом. Участок 12040 рукоятки 12015 может захватываться одной рукой пользователя хирургического инструмента 12010, а манипулирование упором 12090 и защелкой 12050 можно осуществлять другой рукой. В процессе закрытия защелки 12050, по меньшей мере в одном варианте осуществления, пользователь может двигать одну из своих рук в общем направлении своей другой руки, что может уменьшать непредвиденное или случайное перемещение хирургического инструмента 12010. Хирургический инструмент 12010 получать электропитание от любого подходящего источника питания. Например, электрический кабель может проходить от внешнего источника питания внутрь рукоятки 12015. В некоторых вариантах батарея может храниться, например, в рукоятке 12015.
Хирургический сшивающий инструмент 13010 показан на ФИГ. 107–110. На ФИГ. 107 представлен вид сбоку хирургического инструмента 13010, причем некоторые компоненты удалены, а другие показаны в поперечном разрезе. Инструмент 13010 может содержать рукоятку 13015, первый исполнительный механизм 13020, второй исполнительный механизм 13030, узел ствола 13040 и концевой эффектор 13012, включающий в себя упор 13050 и кассету 13055 со скобками. Стволовой участок 13040 и упор 13050 могут работать, как показано и описано в патенте США № 5,704,534, озаглавленном «УЗЕЛ ШАРНИРА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», выданном 6 января 1998 г. Описание патента США № 5,704,534, озаглавленного «УЗЕЛ ШАРНИРА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», выданного 6 января 1998 г., полностью включено в настоящий документ путем ссылки. Электрический входной кабель 13018 может соединять инструмент 13010 с внешним источником питания. По меньшей мере в одном варианте осуществления внешний источник питания может представлять собой генератор, например, генератор GEN11 производства Ethicon Energy, г. Цинциннати, штат Огайо, США. В различных вариантах осуществления внешний источник питания может содержать преобразователь переменного тока в постоянный. В некоторых вариантах инструмент 13010 может получать электропитание от внутренней батареи, таких как батареи, показанные и описанные в патенте США № 8,210,411, озаглавленном «ХИРУРГИЧЕСКИЙ РАЗРЕЗАЮЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ», выданном 3 июля 2012 г. Описание патента США 8,210,411, озаглавленного «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ», выданного 3 июля 2012 г., полностью включено в настоящий документ путем ссылки.
В различных вариантах осуществления, как показано главным образом на ФИГ. 107, упор 13050 концевого эффектора 13012 может быть выполнен с возможностью перемещения между открытым положением, как показано на ФИГ. 107, и закрытым положением, в котором упор 13050 примыкает или соприкасается с кассетой 13055 со скобками, как дополнительно описано ниже более подробно. По меньшей мере в одном таком варианте кассета 13055 со скобками может быть выполнена без возможности поворота относительно упора 13050. В некоторых не показанных вариантах кассета 13055 со скобками может быть выполнена с возможностью поворота относительно упора 13050. По меньшей мере в одном таком варианте упор 13050 может быть выполнен без возможности поворота относительно кассеты 13055 со скобками. В любом случае пользователь инструмента 13010 может манипулировать концевым эффектором 13012 для того, чтобы разместить ткань T между упором 13050 и кассетой 13055. После подходящего размещения ткани T между упором 13050 и кассетой 13055 со скобками пользователь может потянуть первый исполнительный механизм 13020 и активировать закрывающую систему инструмента 13010. Закрывающая система может переместить упор 13050 относительно кассеты 13055 со скобками. Например, первый исполнительный механизм 13020 можно потянуть к участку пистолетной рукоятки 13016 рукоятки 13015 для закрытия упора 13050, как дополнительно описано ниже более подробно.
Закрывающий привод может включать в себя закрывающий двигатель 13105 (ФИГ. 110), выполненный с возможностью перемещения упора 13050. Закрывающий двигатель 13105 можно прикрепить к рукоятке 13015, например, посредством кронштейна 13101 двигателя. Сжимание первого исполнительного механизма 13020 из открытого положения (ФИГ. 108) в закрытое положение (ФИГ. 109) может подавать питание на закрывающий двигатель 13105. Как показано главным образом на ФИГ. 110, закрывающий двигатель 13105 может включать в себя поворачиваемый выходной ствол, функционально взаимодействующий с закрывающим ходовым винтом 13110. Когда закрывающий двигатель 13105 поворачивает выходной ствол в первом направлении, выходной ствол может поворачивать закрывающий ходовой винт 13110 в первом направлении. Закрывающий ходовой винт 13110 может функционально удерживаться внутри рукоятки 13015 с возможностью поворота и может включать в себя резьбовой участок. Закрывающий привод также может дополнительно содержать закрывающую гайку, находящуюся в резьбовом взаимодействии с резьбовым участком закрывающего ходового винта 13110. Закрывающая гайка может не иметь возможности поворота вместе с закрывающим ходовым винтом 13110 так, что поворотное перемещение закрывающего ходового винта 13110 может поступательно перемещать закрывающую гайку. Закрывающая гайка может входить в контакт или может быть образована заодно с закрывающей вилкой 13120. Когда закрывающий двигатель 13015 поворачивается в первом направлении, закрывающий ходовой винт 13110 может выдвигать закрывающую вилку 13120 дистально. В различных вариантах осуществления закрывающая вилка 13120 может удерживаться с возможностью скольжения внутри рукоятки 13015 посредством направляющих 13122, проходящих от рукоятки 13015, которые ограничивают перемещение закрывающей вилки 13120 траекторией вдоль продольной оси. Такая ось может быть параллельной, по существу параллельной, коллинеарной или по существу коллинеарной продольной оси, образованной узлом 13040 ствола. Закрывающий привод дополнительно может содержать закрывающую трубку 13125, проходящую дистально от закрывающей вилки 13120. Закрывающая трубка 13125 также может быть частью узла ствола 13040 и может поступательно перемещаться относительно рамы узла 13040 ствола. При дистальном выдвигании закрывающей вилки 13120 посредством закрывающего ходового винта 13110, закрывающая вилка 13120 может выдвигать дистально закрывающую трубку 13125. Дистальный конец закрывающей трубки 13125 может входить в функциональное взаимодействие с упором 13050 так, что когда закрывающая трубка 13125 выдвигается дистально, эта закрывающая трубка 13125 может толкать упор 13050 из открытого положения в закрытое положение. В патенте США № 5,704,534, озаглавленном «ШАРНИРНЫЙ УЗЕЛ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ», выданном 6 января 1998 года, описывается закрывающая система с ручным приводом.
По меньшей мере в одной форме инструмент 13010 может включать в себя переключатель закрывающей системы, расположенный в рукоятке 13015, который может замыкаться при перемещении первого исполнительного механизма 13020 из открытого положения (ФИГ. 108) в закрытое положение (ФИГ. 109). В некоторых вариантах переключатель закрывающей системы может замыкаться, когда первый исполнительный механизм 13020 находится в закрытом положении (ФИГ. 109). В любом случае, когда переключатель закрывающей системы замкнут, схема питания закрывающей системы может быть замкнута и подавать электроэнергию к закрывающему двигателю 13105 с целью поворота закрывающего двигателя 13105 в первом направлении, как описывалось выше. В некоторых вариантах хирургически инструмент 13010 может включать в себя микропроцессор и, аналогично указанному выше, переключатель закрывающей системы может находиться в связи для передачи сигнала с микропроцессором. Когда переключатель закрывающей системы посылает микропроцессору сигнал, указывающий на то, что первый исполнительный механизм 13020 закрыт, микропроцессор может подавать питание на закрывающий двигатель 13105 для приведения в действие закрывающего двигателя 13105 в первом направлении и перемещения упора 13050 к закрытому положению. В различных вариантах осуществления закрывающий двигатель 13105 может перемещать упор 13050 к закрытому положению до тех пор, пока первый исполнительный механизм 13020 является по меньшей мере частично активированным, и пока переключатель закрывающей системы находится в замкнутом состоянии. Когда пользователь высвобождает первый исполнительный механизм 13020, и первый исполнительный механизм 13020 возвращается в неактивированное положение, переключатель закрывающей системы может размыкаться, и подача питания на закрывающий двигатель 13105 может прерываться. Такие варианты могут оставлять упор 13050 в частично закрытом положении. При повторной активации первого исполнительного механизма 13020 и замыкании переключателя закрывающей системы питание снова может подаваться на закрывающий двигатель 13105 для перемещения упора 13050 к закрытому положению. В свете вышеизложенного пользователь хирургического инструмента 13010 может активировать первый исполнительный механизм 13020 и подождать, пока закрывающий двигатель 13105 переведет упор 13050 в полностью закрытое положение.
По меньшей мере в одной форме перемещение первого исполнительного механизма 13020 может быть пропорциональным перемещению упора 13050. Первый исполнительный механизм 13020 может перемещаться через первый, или относящийся к активатору, диапазон перемещения при переходе между открытым положением (ФИГ. 108) и закрытым положением (ФИГ. 109). Аналогично, упор 13050 может перемещаться через второй или относящийся к упору диапазон перемещения при перемещении между открытым положением (ФИГ. 107) и закрытым положением. Диапазон перемещения исполнительного механизма может соответствовать диапазону перемещения упора. В качестве примера, диапазон перемещения исполнительного механизма может быть равным диапазону перемещения упора. Например, диапазон перемещения исполнительного механизма может составлять приблизительно 30 градусов, и диапазон перемещения упора может составлять приблизительно 30 градусов. В таких вариантах упор 13050 может находиться в своем полностью открытом положении, когда первый исполнительный механизм 13020 находится в своем полностью открытом положении, упор 13050 может быть повернут на 10 градусов к своему закрытому положению, когда первый исполнительный механизм 13020 повернут на 10 градусов к своему закрытому положению, упор 13050 может быть повернут на 20 градусов к своему закрытому положению, когда первый исполнительный механизм 13020 повернут на 20 градусов к своему закрытому положению и т.д. Такое прямо пропорциональное перемещение первого исполнительного механизма 13020 и упора 13050 может дать пользователю инструмента 13010 чувство положения упора 13050 относительно кассеты 13055 со скобками в том случае, когда упор 13050 скрыт от взгляда в операционном поле.
В дополнение к указанному выше, упор 13050 может реагировать как на закрывающее, так и на открывающее перемещения первого исполнительного механизма 13020. Например, при перемещении первого исполнительного механизма 13020 на 10 градусов к пистолетной рукоятке 13016 упор 13050 может переместиться на 10 градусов к кассете 13055 со скобками, а при перемещении первого исполнительного механизма 13020 на 10 градусов от пистолетной рукоятки 13016 упор 13050 может перемещаться на 10 градусов от кассеты 13055 со скобками. Хотя перемещение первого исполнительного механизма 13020 и перемещение упора 13050 могут быть прямо пропорциональными в соотношении 1:1, другие соотношения также возможны. Например, перемещение первого исполнительного механизма 13020 и перемещение упора 13050 могут быть прямо пропорциональными, например, в соотношении 2:1. В таких вариантах осуществления упор 13050 переместится на 1 градус относительно кассеты 13055 со скобками при перемещении первого исполнительного механизма 13020 на 2 градуса относительно пистолетной рукоятки 13016. Кроме этого, в таких случаях диапазон перемещения первого исполнительного механизма 13020 может быть вдвое большим, чем диапазон перемещения упора 13050. В другом варианте осуществления перемещение первого исполнительного механизма 13020 и перемещение упора 13050 могут быть прямо пропорциональными, например, в соотношении 1:2. В таких вариантах осуществления упор 13050 переместится на 2 градуса относительно кассеты 13055 со скобками при перемещении первого исполнительного механизма 13020 на 1 градус относительно пистолетной рукоятки 13016. Кроме этого, в таких случаях диапазон перемещения первого исполнительного механизма 13020 может быть вдвое меньшим, чем диапазон перемещения упора 13050. В различных вариантах осуществления перемещение первого исполнительного механизма 13020 может быть линейно пропорциональным перемещению упора 13050. В других вариантах осуществления перемещение первого исполнительного механизма 13020 может быть нелинейно пропорциональным перемещению упора 13050. Независимо от используемого соотношения, такие варианты осуществления могут быть возможны благодаря, например, применению потенциометра, который может оценивать поворот первого исполнительного механизма 13020, что будет дополнительно описано ниже более подробно.
В дополнение к указанному выше, как показано на ФИГ. 108–110, закрывающая система инструмента 13010 может содержать ползунковый потенциометр 13090, который может обнаруживать перемещение первого исполнительного механизма 13020. Первый исполнительный механизм 13020 может быть установлен с возможностью поворота на рукоятку 13015, например, посредством шарнира 13021. Первый исполнительный механизм 13020 может содержать шестереночный участок 13070, который содержит несколько шестереночных зубцов, проходящих по окружности вокруг шарнира 13021. Дополнительно к вышеизложенному, при повороте первого исполнительного механизма 13020 проксимально к пистолетной рукоятке 13016 шестереночный участок 13070 может поворачиваться дистально. Соответственно, при повороте первого исполнительного механизма 13020 дистально от пистолетной рукоятки 13016 шестереночный участок 13070 может поворачиваться проксимально. Закрывающая система может дополнительно содержать рейку 13080 закрывающей вилки, удерживаемую с возможностью скольжения внутри рукоятки 13015. Рейка 13080 закрывающей вилки может содержать продольный набор зубцов, проходящих вдоль ее нижней поверхности, которые обращены к шестереночному участку 13070 первого исполнительного механизма 13020. Шестереночный участок 13070 первого исполнительного механизма 13020 может находиться в зацепляющем взаимодействии с набором зубцов, выполненных в рейке 13080 закрывающей вилки так, что при повороте первого исполнительного механизма 13020 вокруг шарнира 13021 первый исполнительный механизм 13020 может смещать рейку 13080 закрывающей вилки проксимально или дистально, в зависимости от направления поворота первого исполнительного механизма 13020. Например, при повороте первого исполнительного механизма 13020 в сторону пистолетной рукоятки 13016 первый исполнительный механизм 13020 может смещать рейку 13080 закрывающей вилки дистально. Соответственно, при повороте первого исполнительного механизма 13020 от пистолетной рукоятки 13016 первый исполнительный механизм 13020 может смещать рейку 13080 закрывающей вилки проксимально. Рукоятка 13015 может включать в себя направляющий паз, образованный в ней, который может быть выполнен с возможностью скользящего удерживания рейки 13080 закрывающей вилки и ограничения перемещения рейки 13080 закрывающей вилки траекторией, образованной вдоль продольной оси. Такая продольная ось может быть параллельной, по существу параллельной, коллинеарной или по существу коллинеарной продольной оси узла 13040 ствола.
Рейка 13080 закрывающей вилки может включать в себя обнаруживаемый элемент 13081, установленный на ней. Обнаруживаемый элемент 13081 может содержать магнитный элемент, например, постоянный магнит. Обнаруживаемый элемент 13081 может быть выполнен с возможностью поступательного перемещения внутри продольного паза 13091, образованного в ползунковом потенциометре 13090, при перемещении рейки 13080 закрывающей вилки внутри рукоятки 13015. Ползунковый потенциометр 13090 может быть выполнен с возможностью обнаружения положения обнаруживаемого элемента 13081 внутри продольного паза 13091 и передачи этого положения микропроцессору хирургического инструмента 13010. Например, когда первый исполнительный механизм 13020 находится в открытом, неактивированном положении (ФИГ. 108), обнаруживаемый элемент 13081 может находиться на проксимальном конце продольного паза 13091, и потенциометр 13090 может передавать микропроцессору сигнал, указывающий микропроцессору, что первый исполнительный механизм 13020 находится в открытом положении. Используя эту информацию, микропроцессор может поддерживать упор 13050 в открытом положении. При повороте первого исполнительного механизма 13020 к пистолетной рукоятке 13016 обнаруживаемый элемент 13081 может скользить в дистальном направлении внутри продольного паза 13091. Потенциометр 13090 может передать микропроцессору сигнал или множество сигналов, которые могут указывать положение первого исполнительного механизма 13020. В ответ на такой сигнал или множество сигналов микропроцессор может приводить в действие закрывающий двигатель 13105 для перемещения упора 13055 в положение, соответствующее положению первого исполнительного механизма 13020. Когда первый исполнительный механизм 13020 находится в закрытом, полностью активированном положении (ФИГ. 109), обнаруживаемый элемент 13081 может находиться на дистальном конце продольного паза 13091, и потенциометр 13090 может передавать микропроцессору сигнал, указывающий микропроцессору, что первый исполнительный механизм 13020 находится в закрытом положении. Используя эту информацию, микропроцессор может перемещать упор 13050 в закрытое положение.
Когда первый исполнительный механизм 13020 тянут так, что он по существу смежен с пистолетной рукояткой 13016 рукоятки 13015, как описано выше, рейка 13080 закрывающей вилки перемещается в крайнее дистальное положение. Когда рейка 13080 закрывающей вилки находится в крайнем дистальном положении, освобождающая закрывающую систему кнопка 13140 может входить в контакт с рейкой 13080 закрывающей вилки и удерживать с возможностью высвобождения рейку 13080 закрывающей вилки в крайнем дистальном положении, в результате чего упор 13050 удерживается в закрытом положении с возможностью высвобождения. Как показано главным образом на ФИГ. 108, освобождающая закрывающую систему кнопка 13140 может быть установлена на рукоятке 13015 с возможностью поворота вокруг шарнира 13141. Высвобождающая закрывающую систему кнопка 13140 может включать в себя фиксирующее плечо 13142, проходящее от нее. Когда первый исполнительный механизм 13120 находится в неактивированном положении, и рейка 13080 закрывающей вилки находится в крайнем проксимальном положении, фиксирующее плечо 13142 может располагаться над и/или примыкать к верхней поверхности рейки 13080 закрывающей вилки. В таком положении рейка 13080 закрывающей вилки может скользить относительно фиксирующего плеча 13142. В некоторых ситуациях фиксирующее плечо 13142 может смещаться к верхней поверхности рейки 13080 закрывающей вилки. Как будет описано ниже более подробно, инструмент 13010 может дополнительно содержать фиксирующий элемент 13290, выполненный для удерживания с возможностью высвобождения первого исполнительного механизма 13020 и второго исполнительного механизма 13030 в неактивированной конфигурации, представленной на ФИГ. 108. Между блокиратором 13290 и пусковой кнопкой 13140 может располагаться пружина 13150, которая может смещать с возможностью поворота высвобождающую закрывающую систему кнопку 13140 вокруг шарнира 13141 и располагать фиксирующее плечо 13142 вплотную к верхней поверхности рейки 13080 закрывающей вилки. В различных вариантах осуществления фиксирующий элемент 13290 может включать в себя проксимальный выступ 13296, а высвобождающая закрывающую систему кнопка 13140 может включать в себя дистальный выступ 13146, которые могут быть выполнены с возможностью удерживания и выравнивания пружины 13150 в положении между фиксирующим элементом 13290 и высвобождающей закрывающую систему кнопкой 13140. При повороте первого исполнительного механизма 13020 в активированное положение, как показано на ФИГ. 109, рейка 13080 закрывающей вилки может находиться в крайнем дистальном положении, и фиксирующее плечо 13142 может сдвигаться или падать в вырез 13082, сформированный в проксимальном конце рейки 13080 закрывающей вилки. Более того, при перемещении первого исполнительного механизма 13020 в закрытое, или активированное положение, показанное на ФИГ. 109 и 110, первый исполнительный механизм 13020 может толкать фиксирующий элемент 13290 проксимально и поворачивать фиксирующий элемент 13290 вокруг шарнира 13214. По меньшей мере в одном варианте осуществления первый исполнительный механизм 13020 может включать в себя проходящий от него выступ 13025 активатора, выполненный с возможностью взаимодействия с дистальным выступом 13295, отходящим от фиксирующего элемента 13290. Такое перемещение фиксирующего элемента 13290 может сжимать пружину 13150 между фиксирующим элементом 13290 и высвобождающей закрывающую систему кнопкой 13140 и увеличивать смещающую силу, прикладываемую к высвобождающей закрывающую систему кнопке 13140. Как только фиксирующее плечо 13142 взаимодействует с вырезом 13082, рейка 13080 закрывающей вилки может лишиться возможности перемещения или по меньшей мере существенного перемещения в проксимальном направлении или дистальном направлении.
Как описано выше, первый исполнительный механизм 13020 и второй исполнительный механизм 13030 могут удерживаться с возможностью освобождения и/или смещаться в неактивированное положение, показанное на ФИГ. 108. Инструмент 13010 может включать в себя возвратную пружину 13210, включающую в себя первый конец, соединенный с шарниром 13214, и второй конец, соединенный с пружинной опорой 13034, проходящей от второго исполнительного механизма 13030. Второй исполнительный механизм 13030 может быть установлен на рукоятке 13015 с возможностью поворота вокруг шарнира 13021, и возвратная пружина 13210 может прикладывать смещающее усилие ко второму исполнительному механизму 13030 для поворота второго активатора 13030 вокруг шарнира 13021. Фиксирующий элемент 13290 может останавливать поворот второго исполнительного механизма 13030 вокруг шарнира 13021. Более конкретно, пружина 13150, действие которой состоит во введении освобождающей закрывающую систему кнопки 13140 во взаимодействие с рейкой 13080 закрывающей вилки, также может толкать фиксирующий элемент 13290 дистально так, что фиксирующее плечо 13292 фиксирующего элемента 13290 будет находиться позади буртика 13032, выполненного на втором исполнительном механизме 13030, который может ограничивать поворот второго исполнительного механизма 13030 и удерживать второй исполнительный механизм 13030 в неактивированном положении, как показано на ФИГ. 108. Как показано преимущественно на ФИГ. 110, второй исполнительный механизм 13030 может содержать буртик 13031, который может быть выполнен с возможностью упора в шестереночный участок 13070 первого исполнительного механизма 13020 и перемещения первого исполнительного механизма 13020 в неактивированное положение (ФИГ. 108). Когда первый исполнительный механизм 13020 поворачивается в сторону активированного положения (ФИГ. 109), первый исполнительный механизм 13020 может по меньшей мере частично поворачивать второй исполнительный механизм 13030 в сторону пистолетной рукоятки 13016 против действия смещающей силы, создаваемой пружиной 13210. Фактически, активация первого исполнительного механизма 13020 может делать второй исполнительный механизм 13030 доступным для пользователя хирургического инструмента 13010. До активации первого активатора 13020 второй исполнительный механизм 13030 может быть недоступен для пользователя. В любом случае, читатель помнит, что активация первого исполнительного механизма 13020 толкает фиксирующий элемент 13295 проксимально. Такое проксимальное перемещение фиксирующего элемента 13295 может смещать фиксирующий элемент 13295 из положения позади буртика 13032, образованного во втором исполнительном механизме 13030.
Как только первый исполнительный механизм 13020 переместился и был заблокирован в полностью активированном положении (ФИГ. 109), и упор 13050 переместился в закрытое положение, как описано выше, инструмент 13010 можно использовать для сшивания ткани, находящейся между упором 13050 и кассетой 13055 со скобками. Если пользователь не удовлетворен расположением ткани между упором 13050 и кассетой 13055 со скобками, пользователь может разблокировать упор 13050, нажав высвобождающую закрывающую систему кнопку 13140. При нажатии на высвобождающую закрывающую систему кнопку 13140 фиксирующее плечо 13142 высвобождающей закрывающую систему кнопки 13140 может повернуться вверх из прорези 13082, что может позволить рейке 13080 закрывающей вилки переместиться проксимально. Кроме этого возвратная пружина 13210 может вернуть первый исполнительный механизм 13120 и второй исполнительный механизм 13130 в неактивированные положения, показанные на ФИГ. 109 и, благодаря зубчатому взаимодействию между шестереночным участком 13070 и рейкой 13080 закрывающей вилки, возвратная пружина 13210 может вернуть рейку 13080 закрывающей вилки обратно в проксимальное положение. Такое перемещение рейки 13080 закрывающей вилки можно обнаруживать ползунковым потенциометром 13090, который может передать микропроцессору инструмента 13010 сигнал, что первый исполнительный механизм 13020 вернулся в неактивированное положение, и что упор 13050 следует вернуть в открытое положение. В результате микропроцессор может заставить закрывающий двигатель 13105 вращаться во втором направлении, перемещать закрывающую гайку закрывающей системы проксимально и оттягивать закрывающую трубку 13125 проксимально, в результате чего упор 13050 вернется в открытое положение. Далее пользователь может изменить положение упора 13050 и кассеты 13055 со скобками и снова закрыть упор 13050, повторно активируя первый исполнительный механизм 13020. В различных вариантах осуществления микропроцессор инструмента 13010 может быть выполнен с возможностью игнорирования входных сигналов от второго исполнительного механизма 13030 до тех пор, пока потенциометр 13090 не обнаружит, что упор 13050 находится в закрытом или по существу закрытом положении.
Когда пользователь удовлетворен положением упора 13050 и кассеты 13055 со скобками, дополнительно к вышеизложенному, пользователь может потянуть второй исполнительный механизм 13030 в закрытое или активированное положение так, что он будет в непосредственной близости к первому исполнительному механизму 13020. Активация второго исполнительного механизма 13030 может приводить к нажатию или замыканию пускового переключателя 13180 в рукоятке 13015. В различных вариантах осуществления пусковой переключатель 13180 может удерживаться крепежным элементом 13102 двигателя, который также может быть выполнен с возможностью удерживания закрывающего двигателя 13105 и/или пускового двигателя 13100. Замыкание пускового переключателя 13180 может приводить в действие пусковой двигатель 13100. В некоторых вариантах пусковой переключатель 13180 может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 13010. Когда микропроцессор получает от пускового переключателя 13180 сигнал, что второй исполнительный механизм 13030 в достаточной мере активирован, микропроцессор может подать сигнал на пусковой двигатель 13100. В различных вариантах осуществления замыкание пускового переключателя 13180 может соединять пусковой двигатель 13100 непосредственно с источником питания постоянного или переменного тока, предназначенным для приведения в действие пускового двигателя 13100. По меньшей мере в одном варианте осуществления пусковой переключатель 13180 может быть расположен так, что пусковой переключатель 13180 не будет замыкаться до тех пор, пока второй исполнительный механизм 13030 не достигнет полностью закрытого положения. Как показано преимущественно на ФИГ. 110, поворот второго исполнительного механизма 13030 можно остановить в полностью закрытом положении, когда он войдет в контакт с первым исполнительным механизмом 13020. По меньшей мере в одном таком варианте осуществления первый исполнительный механизм 13020 может содержать стопорное углубление 13023, выполненное с возможностью принимать в нем стопорный выступ 13033, проходящий от второго исполнительного механизма 13030, при достижении вторым исполнительным механизмом 13030 закрытого положения.
Пусковой двигатель 13100 может включать в себя поворотный выходной ствол, который функционально взаимодействует с пусковым ходовым винтом 13190 пусковой системы. Когда пусковой двигатель 13100 приводится в действие с вращением его выходного ствола в первом направлении, выходной ствол может поворачивать пусковой ходовой винт 13190 в первом направлении. Когда пусковой двигатель 13100 приводится в действие с вращением его выходного ствола во втором, противоположном направлении, выходной ствол может поворачивать пусковой ходовой винт 13190 во втором направлении. Пусковая система может дополнительно содержать пусковую гайку, находящуюся в резьбовом взаимодействии с резьбовым участком пускового ходового винта 13190. Пусковая гайка может не иметь возможности вращения вместе с пусковым ходовым винтом 13190 так, что вращение пускового ходового винта 13190 позволяет поступательно перемещать пусковую гайку проксимально или дистально в зависимости от направления вращения пускового ходового винта 13190. Пусковая система может дополнительно содержать пусковой ствол 13220, функционально подсоединенный к пусковой гайке, который может смещаться с пусковой гайкой. Пусковая система может также содержать держатель скальпеля 13200 и выпускающие скобки пусковые полоски, которые проходят дистально от пускового ствола 13220. При вращении пускового двигателя 13020 в первом направлении пусковой ходовой винт 13190 может смещать пусковую гайку, пусковой ствол 13220, держатель скальпеля 13200 и пусковые полоски дистально, выталкивая скобки из кассеты 13055 со скобками и разрезая ткань, находящуюся между упором 13050 и кассетой 13055 со скобками. Как только скальпель 13200 и пусковые полоски достигают конца своего хода, микропроцессор может поворачивать пусковой двигатель 13100 во втором, противоположном направлении, возвращая скальпель 13200 и дорожки в их исходное положение. В различных вариантах осуществления инструмент 13010 может включать в себя датчик конца хода, находящийся в связи для передачи сигнала с микропроцессором для передачи сигнала, и подающий микропроцессору сигнал, что пусковой привод достиг конца пускового хода, и что пусковой ход следует выполнить в обратном направлении. Такой датчик конца хода может располагаться, например, в упоре 13050 и/или в кассете 13055 со скобками. В некоторых вариантах осуществления датчик углового положения, функционально соединенный с пусковым двигателем 13100, может определить, что пусковой двигатель 13100 совершил достаточное количество оборотов, чтобы скальпель 13200 и пусковые полоски достигли конца своего хода, и может подать сигнал микропроцессору, что пусковую систему необходимо оттянуть.
Однако после активации второго исполнительного механизма 13030 инструмент 13010 находится в пусковом состоянии, и микропроцессор может быть выполнен с возможностью игнорирования любых входных сигналов от первого исполнительного механизма 13020 и/или ползункового потенциометра 13090, пока пусковая система не вернется в исходное положение. В различных вариантах осуществления инструмент 13010 может включать в себя кнопку отмены, которая при нажатии может посылать микропроцессору сигнал, что пусковой узел следует немедленно оттянуть. По меньшей мере в одном таком варианте пусковая последовательность может быть остановлена при нажатии высвобождающей закрывающую систему кнопки 13140. Как указано выше, нажатие высвобождающей закрывающую систему кнопки 13140 перемещает рейку 13080 закрывающей вилки проксимально, что в свою очередь перемещает обнаруживаемый элемент 13081 проксимально. Проксимальное перемещение обнаруживаемого элемента 13081 может обнаруживаться ползунковым потенциометром 13090, который может подавать микропроцессору сигнал изменить направление поворота пускового двигателя 13100 для втягивания пускового узла и/или приведения в действие закрывающий двигатель 13105 для открытия упора 13050.
Инструмент 13010 также может включать в себя один или более индикаторов, таких как, например, светодиод 13300, выполненных с возможностью указания рабочего состояния инструмента 13010. В различных вариантах светодиод 13300 может работать, например, аналогично светодиоду 11100. Инструмент 13010 также обладает способностью к шарнирному повороту концевого эффектора 13012. Это осуществляется посредством ручки 13240 шарнира, как описано в патенте США № 5,704,534. Ручной поворот узла 13040 ствола также описывается в патенте США № 5,704,534.
В модульной конструкции инструмента 13010 узел 13040 ствола и концевой эффектор 13012 могут быть одноразовыми, и могут крепиться к рукоятке 13015 многоразового использования. В другом варианте осуществления упор 13050 и кассета 13055 со скобками являются одноразовыми, а узел 13040 ствола и рукоятка 13015 допускают многоразовое использование. В различных вариантах осуществления концевой эффектор 13012, в том числе, упор 13015, узел 13040 ствола и рукоятка 13015, могут быть многоразового использования, а кассета 13055 со скобками может быть сменной.
На ФИГ. 111 представлен вид в перспективе хирургического сшивающего инструмента 14010. Инструмент 14010 может содержать исполнительный механизм или рукоятку 14020, стволовой участок 14030, трубчатый кожух 14040 кассеты и упор 14050. Инструмент 14010 может дополнительно включать в себя закрывающую систему, выполненную с возможностью перемещения упора 14050 между открытым положением и закрытым положением. Исполнительный механизм 14020 может содержать поворотную закрывающую ручку 14075, которая может приводить в действие закрывающую систему, как дополнительно описано ниже более подробно. Инструмент 14010 также может включать в себя пусковую систему, выполненную с возможностью выталкивания скоб, которые хранятся с возможностью извлечения в кожухе 14040 кассеты. Исполнительный механизм 14020 может дополнительно содержать пусковой крючок активации 14070, который может приводить в действие систему пуска, как дополнительно описано ниже более подробно. Стволовая часть 14030, кожух 14040 кассеты и упор 14050 могут работать способом, аналогичным показанному и описанному в патенте США № 5,292,053, под названием «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ ДЛЯ АНАСТОМОЗА», выданном 8 марта 1994 г. Описание патента США № 5,292,053, озаглавленного «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ ДЛЯ АНАСТОМОЗА», выданного 8 марта 1994 г., полностью включено в настоящий документ путем ссылки.
В дополнение к вышеизложенному исполнительный механизм 14020 может включать в себя трансмиссию 14000 и кнопку 14060 ползунка, выполненную с возможностью приводить в действие трансмиссию 14000. Кнопка 14060 ползунка выполнена с возможностью перемещения между дистальным положением (ФИГ. 115), которое ближе к кожуху 14040 кассеты, и проксимальным положением (ФИГ. 114), которое дальше от кожуха 14040 кассеты. Когда кнопка 14060 ползунка находится в проксимальном положении, исполнительный механизм 14020 находится в первом рабочем режиме, или режиме закрывания, и может перемещать упор 14050 к кожуху 14040 кассеты и от него. Когда кнопка 14060 ползунка находится в дистальном положении, исполнительный механизм 14020 находится во втором рабочем режиме, или режиме пуска, и может выталкивать скобки из кожуха 14040 кассеты к упору 14050. Когда исполнительный механизм 14020 находится в режиме закрывания, поворотную закрывающую ручку 14075 можно поворачивать вокруг продольной оси, проходящей через исполнительный механизм 14020, перемещая упор 14050 проксимально или дистально, в зависимости от направления поворота закрывающей ручки 14075. Когда исполнительный механизм 14020 находится в пусковом режиме, пусковой крючок 14070 можно повернуть проксимально для выталкивания скоб из кожуха 14040 кассеты. Закрывающая система и пусковая система подробно описаны далее.
Исполнительный механизм 14020 может содержать электродвигатель, такой как двигатель 14090 (ФИГ. 113–115), который может приводить в действие закрывающий привод и пусковой привод посредством трансмиссии 14000. Двигатель 14090 может удерживаться внутри корпуса 14080 исполнительного механизма 14020. Как показано главным образом на ФИГ. 113, корпус исполнительного механизма 14080 может содержать две половины, правую половину 14080a корпуса исполнительного механизма и левую половину 14080b корпуса исполнительного механизма. Половины 14080a и 14080b корпуса исполнительного механизма могут соединяться винтами, хотя при сборке корпуса 14080 исполнительного механизма можно использовать любые подходящие крепежные элементы и/или адгезив. Двигатель 14090 может удерживаться между половинами 14080a и 14080b корпуса исполнительного механизма, и может включать в себя поворачиваемый ствол 14100, отходящий от него дистально. В некоторых вариантах осуществления исполнительный механизм 14020 может содержать опору 14101 двигателя, расположенную внутри корпуса 14080 и выполненную с возможностью удерживания корпуса 14100 двигателя и предотвращения поворота корпуса двигателя относительно корпуса 14080 исполнительного механизма. В различных вариантах поворачиваемый ствол 14100 может содержать прикрепленную к нему удлинительную часть 14110. Стержень 14100 и удлинительная часть 14110 могут быть соединены с возможностью поворота так, что они могут поворачиваться вместе.
В дополнение к вышеизложенному, как показано преимущественно на ФИГ. 116, удлинительная часть 14110 может содержать цилиндрический или по меньшей мере по существу цилиндрический основной элемент 14111 и плоский участок 14120, образованный на дистальном конце 14113 удлинительной части 14110. Цилиндрический основной элемент 14111 удлинительной части 14110 может удерживаться с возможностью поворота внутри корпуса 14080 исполнительного механизма посредством подшипника 14105. Дистальный конец 14113 удлинительной части 14110 может располагаться внутри отверстия 14114, образованного в ползунке 14115. Ползунок 14115, как будет дополнительно описано более подробно ниже, является частью трансмиссии 14000, и может переключаться между проксимальным положением (ФИГ. 114), в котором ползунок 14115 передает поворотное перемещение двигателя 14090 к закрывающей системе, и дистальным положением (ФИГ. 115), в котором ползунок 14115 передает поворотное перемещение двигателя 14090 к системе пуска. При перемещении ползунка 14115 между проксимальным положением (ФИГ. 114) и дистальным положением (ФИГ. 115) ползунок 14115 может скользить относительно удлинительной части 14110. Отверстие 14114, образованное в ползунке 14115, может образовывать периметр, соответствующий или по меньшей мере по существу соответствующий периметру дистального конца 14113 удлинительной части 14110, так, что, во-первых, удлинительная часть 14110 и ползунок 14115 соединены друг с другом с возможностью поворота и, во-вторых, ползунок 14115 может поступательно перемещаться относительно удлинительной части 14110. По меньшей мере в одном варианте осуществления отверстие 14114 ползунка имеет цилиндрический участок 14116, соответствующий цилиндрическому основному элементу 14111 удлинительной части 14110, и плоский участок 14117, соответствующий плоскому участку 14120 на дистальном конце 14113 ползунка 14115.
В дополнение к указанному выше, ползунок 14115 может иметь трубчатую или по существу трубчатую конструкцию. Ползунок 14115 может иметь дистальный конец 14118 и множество наружных расположенных по окружности шлиц 14130, проходящих вокруг внешней поверхности дистального конца 14118, которые могут функционально взаимодействовать с пусковым приводом, как показано на ФИГ. 115. Ползунок 14115 может содержать множество внутренних расположенных по окружности шлиц 14140, образованных в дистальном конце отверстия 14114 ползунка, которые могут функционально взаимодействовать с закрывающим приводом, как показано на ФИГ. 114. Ползунок 14115 может являться частью узла 14150 ползунка. Как показано преимущественно на ФИГ. 116, узел 14150 ползунка может дополнительно содержать верхний опорный подшипник 14160, нижний опорный подшипник 14170, кнопку 14060 ползунка и пружину 14180 ползунка. Верхний опорный подшипник 14160 и нижний опорный подшипник 14170 в совокупности образуют опорный подшипник скольжения, который может, во-первых, удерживать ползунок 14115 достаточно неплотно так, что ползунок 14115 может поворачиваться внутри опорного подшипника, и, во-вторых, смещать ползунок 14115 проксимально и дистально. Как показано главным образом на ФИГ. 116, ползунок 14115 может иметь отходящие от него дистальный фланец 14121 и проксимальный фланец 14122, между которыми может образовываться углубление 14123, образованное с возможностью плотно принимать в нем опорный подшипник. При нажатии кнопки 14060 ползунка дистально опорный подшипник может упираться в дистальный фланец 14121 и толкать ползунок 14115 дистально. Соответственно, при нажатии кнопки 14060 ползунка проксимально опорный подшипник может упираться в проксимальный фланец 14122 и толкать ползунок 14115 проксимально.
Узел стержня 14150 может содержать предохранитель, выполненный с возможностью удерживания ползунка 14115 на одном месте с возможностью освобождения. Как показано главным образом на ФИГ. 116, кнопка 14060 ползунка может содержать фланец 14181, который может избирательно входить в первое углубление, образованное на первом или проксимальном конце продольного паза в корпусе 14080 исполнительного механизма и во второе углубление, образованное на втором или дистальном конце продольного паза. Когда фланец 14181 взаимодействует с проксимальным углублением, фланец 14181 может удерживать узел 14150 ползунка в проксимальном положении, в котором ползунок 14115 и закрывающий привод функционально взаимодействуют с двигателем 14090. Когда фланец 14181 взаимодействует с дистальным углублением, фланец 14181 может удерживать узел 14150 ползунка в дистальном положении, в котором ползунок 14115 и пусковой привод функционально взаимодействуют с двигателем 14090. Верхний опорный подшипник 14160 может включать в себя отверстие 14161 подшипника, выполненное с возможностью скользяще принимать в нем ствол 14061 кнопки 14060. Кнопку 14060 можно вдавить вниз, внутрь отверстия 14161 подшипника, для высвобождения фланца 14181 от корпуса 14080 исполнительного механизма. Как только фланец 14181 высвобожден от корпуса 14080 исполнительного механизма, кнопка 14060 может войти внутрь продольного паза в корпусе 14080 исполнительного механизма и перемещать ползунок 14115 между проксимальным и дистальным положениями. Пружина 14180 может быть выполнена с возможностью смещения фланца 14181 в сторону корпуса 14080 исполнительного механизма и, когда пользователь хирургического инструмента 14010 отпускает кнопку 14060, пружина 14180 может снова смещать кнопку 14060 вверх, во взаимодействие с корпусом 14080 исполнительного механизма.
Когда узел 14150 ползунка находится в проксимальном положении, в дополнение к вышеизложенному, ползунок 14115 входит во взаимодействие с закрывающей гайкой 14190 закрывающего привода. Закрывающая гайка 14190 включает в себя удлиненную трубчатую конструкцию, включающую в себя образованные на ее проксимальном конце внешние шлицы 14200 закрывающей гайки. Когда ползунок 14115 находится в проксимальном положении, внутренние шлицы 14140 ползунка 14115 входят в зубчатое взаимодействие с внешними шлицами 14200 закрывающей гайки 14190 так, что при повороте ползунка 14115 двигателем 14090 закрывающая гайка 14190 поворачивается посредством ползунка 14115. Закрывающая гайка 14190 может удерживаться с возможностью поворота внутри корпуса 14080 исполнительного механизма посредством одного или нескольких подшипников, например, подшипником скольжения 14220, который удерживает с возможностью поворота дистальный конец закрывающей гайки 14190. Подшипник скольжения 14220 закрывающей гайки может быть образован из, например, делрина, нейлона, меди, латуни, бронзы и/или углерода. В некоторых вариантах подшипник 14220 закрывающей гайки может представлять собой, например, шариковый подшипник или роликовый подшипник. В различных вариантах подшипник 14220 закрывающей гайки может быть выполнен заодно с корпусом 14080 исполнительного механизма.
Закрывающая гайка 14190 может содержать продольный канал 14191. Закрывающая система может дополнительно содержать закрывающий шток 14230, который может по меньшей мере частично располагаться внутри продольного канала 14191. На закрывающем штоке 14230 может содержаться резьба 14231, находящаяся в резьбовом соединении с резьбой 14210 закрывающей гайки, образованной в продольном канале 14191. Закрывающий шток 14230 может не иметь возможности поворота вместе с закрывающей гайкой 14190, так что при повороте закрывающей гайки 14190 в первом направлении посредством двигателя 14090 закрывающий шток 14230 может поступательно перемещаться закрывающей гайкой 14190 проксимально. Как показано на ФИГ. 115, закрывающий шток 14230 может проксимально перемещаться внутри продольного канала 14191 закрывающей гайки 14190. Аналогично, когда закрывающая гайка 14190 поворачивается в противоположном втором направлении посредством двигателя 14090, закрывающий шток 14230 может поступательно перемещаться посредством закрывающей гайки 14190 дистально. Как будет более подробно описано ниже, закрывающий шток 14230 может функционально взаимодействовать с упором 14050 так, что при проксимальном перемещении закрывающего штока 14230 упор 14050 может перемещаться в сторону кожуха 14040 кассеты. Соответственно, при дистальном перемещении закрывающего штока 14230 упор 14050 может перемещаться от кожуха 14040 кассеты. В различных вариантах осуществления длину закрывающего хода закрывающей системы можно измерять между открытым положением и закрытым положением упора 14050. Закрывающий шток 14230 может иметь длину по меньшей мере равную длине закрывающего хода, чтобы соответствовать ей.
Как описано выше, кнопка 14060 исполнительного механизма 14020 выполнена с возможностью перемещения между проксимальным положением (ФИГ. 114), в котором трансмиссия 14000 соединена с закрывающим приводом, и дистальным положением (ФИГ. 115), в котором трансмиссия 14000 соединена с пусковым приводом. Таким образом, трансмиссию 14000 можно использовать для избирательного соединения закрывающего привода и пускового привода с двигателем 14090. Когда пользователь хирургического инструмента 14010 удовлетворен положением упора 14050 относительно кожуха 14040 кассеты, пользователь может сместить кнопку 14060 дистально, как показано на ФИГ. 115, чтобы высвободить ползунок 14115 от закрывающего привода и установить взаимодействие ползунка 14115 с пусковым приводом. Когда ползунок 14115 скользит дистально, внутренние шлицы 14140 ползунка 14115 отсоединяются от внешних шлиц 14200 закрывающей гайки 14190 так, что последующий поворот ползунка 14115 более не передается на закрывающую гайку 14190 и закрывающую систему. Параллельно с высвобождением ползунка от закрывающей системы, ползунок 14115 может входить во взаимодействие с пусковой системой. В альтернативном варианте осуществления ползунок 14115 может высвобождаться от закрывающей системы при дистальном смещении ползунка 14115, и благодаря дополнительному дистальному смещению ползунка 14115, ползунок 14115 может войти во взаимодействие с системой пуска. В таких ситуациях трансмиссия 14000 не может одновременно функционально соединять с двигателем 14090 и закрывающую систему, и систему пуска. В любом случае, пусковая система может включать в себя пусковую гайку 14260, которая может взаимодействовать с ползунком 14115 при дистальном перемещении ползунка 14115.
В дополнение к указанному выше, как показано преимущественно на ФИГ. 116, пусковая гайка 14260 может включать в себя образованное в ней отверстие 14261, которое может быть выполнено с возможностью принимать в себя дистальный конец 14118 ползунка 14115 при выдвигании ползунка 14115 в его дистальное положение (ФИГ. 115). Отверстие 14261 пусковой гайки может включать в себя шлицы 14270 пусковой гайки, образованные по ее внутренней окружности, которые могут сцепляться со шлицами 14130, расположенными по внешней окружности ползунка 14115. Когда шлицы 14130 внешней окружности ползунка 14115 взаимодействуют со шлицами 14270 пусковой гайки 14260, ползунок 14115 может соединяться с возможностью поворота с пусковой гайкой 14260 так, что поворот ползунка 14115 передается на пусковую гайку 14260. Исполнительный механизм 14020 дополнительно может содержать подшипник 14275 пусковой гайки, удерживающий с возможностью поворота 14260. Подшипник 14275 пусковой гайки может представлять собой игольчатый подшипник, подшипник из делрина, нейлона и/или иного пластика, металлический подшипник, или он может являться, например, частью корпуса 14080 исполнительного механизма. Пусковая гайка 14260 дополнительно может содержать внутреннюю резьбу 14272, образованную на дистальной внутренней поверхности отверстия 14261 пусковой гайки. Пусковая система может дополнительно содержать пусковую трубку 14280, находящуюся в резьбовом взаимодействии с внутренней резьбой 14272 пусковой гайки 14260.
В различных вариантах, в дополнение к указанному выше, пусковая трубка 14280 может включать в себя резьбу 14281, образованную на ее наружной поверхности, которая находится в резьбовом соединении с внутренней резьбой 14272. Пусковая трубка 14280 может не иметь возможности поворота вместе с пусковой гайкой 14260 так, что при повороте пусковой гайки 14260 посредством двигателя 14090 и ползунка 14115 пусковая гайка 14260 может поступательно перемещать пусковую трубку 14280. Например, при повороте пусковой гайки 14260 в первом направлении пусковая трубка 14280 может смещаться посредством пусковой гайки 14260 дистально, а при повороте пусковой гайки 14260 во втором, противоположном направлении, пусковая трубка 14280 может смещаться посредством пусковой гайки 14260 проксимально. По меньшей мере часть пусковой трубки 14280 может располагаться внутри отверстия 14261, образованного в пусковой гайке 14260. При проксимальном смещении пусковой трубки 14280, пусковая трубка 14280 может перемещаться внутри отверстия 14261 проксимально. При дистальном смещении пусковой трубки 14280, пусковая трубка 14280 может перемещаться внутри отверстия 14261 дистально. Как будет более подробно описано ниже, пусковая трубка 14280 может быть функционально подсоединена к пусковому элементу, способным выталкивать скобки из корпуса 14040 кассеты при выдвижении пусковой трубки 14280 дистально. Пусковая трубка 14280 может втягивать пусковой элемент, когда пусковая трубка 14280 перемещается проксимально. Пусковая трубка 14280 может быть достаточно длинной, чтобы обеспечить пусковой ход пускового элемента при перемещении пускового элемента между неактивированным и активированным положениями. В различных вариантах резьбовой участок пусковой трубки 14280 является более коротким, чем резьбовой участок закрывающего штока 14230. В таких обстоятельствах пусковой ход может быть короче, чем закрывающий ход. В других вариантах резьбовой участок пусковой трубки 14280 может иметь ту же длину, что и резьбовой участок закрывающего штока 14230. В таких вариантах пусковой ход может иметь такую же длину, как закрывающий ход. В некоторых вариантах резьбовой участок пусковой трубки 14280 является более длинным, чем резьбовой участок закрывающего штока 14230. В таких обстоятельствах пусковой ход может быть длиннее, чем закрывающий ход.
В дополнение к указанному выше, исполнительный механизм 14020 и стволовой участок 14030 могут представлять собой единую систему. В различных вариантах исполнительный механизм 14020 и стволовой участок 14030 могут представлять собой единый узел. В некоторых вариантах исполнительный механизм 14020 может разбираться от стволового участка 14030. На ФИГ. 34 представлен вид в перспективе хирургического сшивающего инструмента 14010, представляющий исполнительный механизм 14020 разобранным от стволового участка 14030. Инструмент 14010 может содержать один или более фиксирующих элементов или защелок, выполненных с возможностью разъемного удерживания стволового участка 14030 на исполнительном механизме 14020. Например, исполнительный механизм 14020 может включать в себя на своих противоположных сторонах защелки 14025, выполненные с возможностью разъемного удерживания стволового участка 14030 на исполнительном механизме 14020. Защелки 14025 могут скользить между первым положением, в котором они взаимодействуют со стволовым участком 14030, и вторым положением, в котором они высвобождены от стволового участка 14030. Как более подробно описано ниже, исполнительный механизм 14020 и стволовой участок 14030 могут содержать участки закрывающей системы, которые функционально собираются вместе при сборке стволового участка 14030 с исполнительным механизмом 14020. Аналогично, исполнительный механизм 14020 и стволовой участок 14030 могут содержать участки пусковой системы, которые функционально собираются вместе при сборке стволового участка 14030 с активатором 14020.
В дополнение к указанному выше, как показано преимущественно на ФИГ. 113, закрывающая система дополнительно может содержать закрывающую фиксаторную деталь 14240, присоединенную к дистальному концу закрывающего штока 14230. В различных вариантах винт может блокировать закрывающую фиксаторную деталь 14240 на закрывающем штоке 14230 так, что закрывающая фиксаторная деталь 14240 поступательно перемещается дистально при поступательном перемещении закрывающего штока 14230 дистально и, соответственно, поступательно перемещается проксимально при поступательном перемещении закрывающего штока 14230 проксимально. Закрывающая фиксаторная деталь 14240 может содержать один или более боковых выступов, которые могут входить в желоба корпуса 14080 исполнительного механизма для выравнивания закрывающей фиксаторной детали 14240 и закрывающего штока 14230. Боковые выступы могут также предотвращать поворот закрывающего штока 14230 и закрывающей фиксаторной детали 14240, когда закрывающий шток 14230 двигается посредством закрывающей гайки 14190, как описано выше. Закрывающая фиксаторная деталь 14240 может содержать выходной элемент закрывающего привода исполнительного механизма 14020 и может быть прикреплена к входному элементу закрывающего привода стволового участка 14030. Входной элемент закрывающего привода стволового участка 14030 может содержать вторую фиксаторную деталь 14250, которая может прикрепляться к закрывающей фиксаторной детали 14240 при сборке стволового участка 14030 на исполнительном механизме 14020. Закрывающая фиксаторная деталь 14240 может толкать вторую фиксаторную деталь 14250 дистально при дистальном выдвижении закрывающей фиксаторной детали 14240 закрывающим штоком 14230; соответственно, закрывающая фиксаторная деталь 14240 может тянуть вторую фиксаторную деталь 14250 проксимально при проксимальном втягивании закрывающей фиксаторной детали 14240 закрывающим штоком 14230.
Участок закрывающего привода стволового участка 14030 дополнительно может содержать одну или более стяжных хомутов 14252 и 14253, которые крепятся ко второй фиксаторной детали 14250 и проходят от нее. Стяжные хомуты 14252 и 14253 могут крепиться ко второй фиксаторной детали 14250 так, что вторая фиксаторная деталь 14250 может толкать стяжные хомуты 14252, 14253 дистально при выдвижении второй фиксаторной детали 14250 дистально посредством закрывающей фиксаторной детали 14240 и, соответственно, так, что вторая фиксаторная деталь 14250 может тянуть стяжные хомуты 14252, 14253 проксимально при проксимальном втягивании второй фиксаторной детали 14250 посредством закрывающей фиксаторной детали 14240. В различных вариантах стволовой участок 14030 может быть изогнутым и по меньшей мере в одном варианте осуществления может включать в себя изогнутый корпус 14031 ствола, проходящий от проксимального крепежного элемента 14032 корпуса. В некоторых вариантах стяжные хомуты 14252 и 14253 могут быть гибкими, чтобы приспосабливаться к изогнутой траектории участка закрывающего привода стволового участка 14030. Участок закрывающего привода стволового участка 14030 может дополнительно содержать крепежный участок, или троакар 14258, прикрепленный к стяжным хомутам 14253 и 14253. Троакар 14258 может крепиться к стяжным хомутам 14252, 14253 так, что троакар 14258 выдвигается и втягивается вместе со стяжными хомутами 14252, 14253. Троакар 14258 может содержать дистальный конец, который может быть выполнен с возможностью разъемного взаимодействия с упором 14050 так, что упор 14050 выдвигается и втягивается вместе с троакаром 14258, когда упор 14050 собран на троакаре 14258. В вышеупомянутом патенте США №. 5,292,503 это описывается более подробно.
В дополнение к указанному выше, как показано главным образом на ФИГ. 113, пусковая система дополнительно может содержать пусковую фиксаторную деталь 14290, присоединенную к дистальному концу пусковой трубки 14280. В различных вариантах винт может блокировать пусковую фиксаторную деталь 14290 на пусковой трубке 14280 так, что пусковая фиксаторная деталь 14290 поступательно перемещается дистально при поступательном перемещении пусковой трубки 14280 дистально и, соответственно, поступательно перемещается проксимально при поступательно перемещении пусковой трубки 14280 проксимально. Пусковая фиксаторная деталь 14290 может содержать один или более боковых выступов, которые входят в желоба 14080 корпуса исполнительного механизма для выравнивания пусковой фиксаторной детали 14290 и пусковой трубки 14280. Боковые выступы могут также предотвращать поворот пусковой трубки 14280 и пусковой фиксаторной детали 14290, когда пусковая трубка 14280 двигается посредством пусковой гайки 14260, как описано выше. Пусковая фиксаторная деталь 14290 может содержать выходной элемент пускового привода исполнительного механизма 14020 и может быть прикреплена к входному элементу пускового привода стволового участка 14030. Входной элемент пускового привода стволового участка 14030 может содержать вторую фиксаторную деталь 14300, которая может прикрепляться к пусковой фиксаторной детали 14290 при сборке стволового участка 14030 на исполнительном механизме 14020. Пусковая фиксаторная деталь 14290 может сопрягаться по принципу язычок-в-желоб со второй пусковой фиксаторной деталью 14300. В собранном состоянии пусковая фиксаторная деталь 14290 может толкать вторую фиксаторную деталь 14300 дистально при дистальном выдвижении пусковой фиксаторной детали 14290 пусковой трубкой 14280; соответственно, пусковая фиксаторная деталь 14290 может тянуть вторую фиксаторную деталь 14300 проксимально при проксимальном втягивании пусковой фиксаторной детали 14290 пусковой трубкой 14280.
Пусковой привод дополнительно может содержать выталкиватель 14310 скоб, соединенный со второй фиксаторной деталью 14300 так, что выталкиватель 14310 скоб перемещается проксимально и дистально вместе со второй фиксаторной деталью 14300. При перемещении выталкивателя 14310 скоб дистально посредством второй фиксаторной детали 14300 выталкиватель 14310 скоб может выталкивать скобки из корпуса 14040 кассеты. В различных вариантах вторая фиксаторная деталь 14300 может дистально выдвигать скальпель 14320 вместе с выталкивателем 14310 скоб для разрезания ткани, захваченной между упором 14050 и корпусом 14040 кассеты. Вторая фиксаторная деталь 14300 может втягивать выталкиватель 14310 скоб и скальпель 14320 проксимально при проксимальном втягивании второй фиксаторной детали 14300 посредством пусковой фиксаторной детали 14290.
В дополнение к указанному выше можно отметить, что части закрывающей системы, содержащей закрывающую гайку 14190 и закрывающий шток 14230, а также части пусковой системы, содержащей пусковую гайку 14260 и пусковую трубку 14280, могут быть концентрическими и встроенными. Пусковую гайку 14260 и пусковую трубку 14280 можно считать внешним механизмом, а закрывающую гайку 14190 и закрывающий шток 14 230 можно считать внутренним механизмом. Вместе с ползунком 14115, закрывающая гайка 14190, закрывающий шток 14230, пусковая гайка 14260 и пусковая трубка 14280 могут образовывать трансмиссию 14000. Концентрическая и встроенная конструкция трансмиссии 14000 позволяет уменьшить место, занимаемое закрывающими системами и системами пуска, и создать исполнительный механизм 14020 меньшего размера, более удобный для удерживания. Такая конструкция также позволяет внешнему механизму служить опорой и обеспечивать несущие поверхности для перемещающихся частей внутреннего механизма. В представленном варианте осуществления поступательно перемещающиеся элементы внутреннего механизма показаны более длинными, чем поступательно перемещающиеся элементы внешнего механизма. Закрывающий шток 14230, например, может иметь длину порядка пяти сантиметров (два дюйма), а пусковая трубка 14280 может иметь длину, например, порядка двух с половиной сантиметров (один дюйм); однако можно использовать любую подходящую длину. Более длинные перемещающиеся элементы подходят, если требуется более длинная дистанция перемещения. В представленных вариантах внутренний механизм или закрывающий привод может двигать нагрузку на большее расстояние, чем внешний механизм или пусковой привод. Иными словами, закрывающий привод может двигать нагрузку дальше, чем пусковой привод.
Как описано выше, исполнительный механизм 14020 и стволовой участок 14030 разработаны с возможностью удобной сборки. Пусковая фиксаторная деталь 14290 имеет полукруглый выступ на конце дистально выступающего фланца. Этот полукруглый выступ входит в полукруглый желоб на проксимальном конце второй пусковой фиксаторной детали 14300. Поскольку соединение происходит по полукруглой поверхности, соединить пусковую фиксаторную деталь 14290 со второй пусковой фиксаторной деталью 14300 можно путем перемещения пусковой фиксаторной детали 14290 ко второй пусковой фиксаторной детали 14300 в направлении, поперечном или перпендикулярном общей продольной оси этих деталей. Соединение деталей закрывающего узла также облегчено, по существу, таким же способом. Например, закрывающая фиксаторная деталь 14240 может содержать дистально проходящий фланец. На дистальном конце этого фланца имеется полукруглый выступ, проходящий от по существу полукруглой части закрывающей фиксаторной детали 14240. Кольцевой желоб на проксимальном участке второй фиксаторной детали 14250 принимает этот полукруглый выступ и прикрепляет закрывающую фиксаторную деталь 14240 ко второй фиксаторной детали 14250. Учитывая полукруглую форму закрывающей фиксаторной детали 14240, закрывающую фиксаторную деталь 14240 и вторую фиксаторную деталь 14250 можно собирать и разбирать путем поступательного перемещения, поперечного или перпендикулярного общей продольной оси этих деталей, что способствует быстрому соединению и отсоединению стволового участка 14030 и исполнительного механизма 14020.
Как по существу показано на ФИГ. 113 пусковой механизм 14070 и закрывающая ручка 14075 дополнительно показаны с пространственным разделением компонентов, чтобы лучше видеть их взаимодействие с соседними деталями. Закрывающая ручка 14075 выполнена с возможностью поворота в первом направлении, по часовой стрелке, и во втором направлении, против часовой стрелки. При повороте закрывающей ручки 14075 в первом направлении, закрывающая ручка 14075 может входить в контакт и замыкать первый переключатель, а при повороте закрывающей ручки 14075 во втором направлении закрывающая ручка 14075 может входить в контакт и замыкать второй переключатель. При замыкании первого переключателя замыкающей ручкой 14075 на двигатель 14090 может быть подано питание, и он может работать в первом направлении, а при замыкании второго переключателя закрывающей ручкой, на двигатель 14090 может быть подано питание и он может работать во втором направлении. При работе двигателя 14090 в первом направлении двигатель 14090 может двигать закрывающий шток 14230 дистально, чтобы перемещать упор 14050 от корпуса 14040 кассеты, а при работе двигателя 14090 во втором направлении двигатель 14090 может двигать закрывающий шток 14230 проксимально, чтобы перемещать упор 14050 к корпусу 14040 кассеты. Закрывающая ручка 14075 может быть выполнена с возможностью установки в центральном или нейтральном положении, в котором ни первый переключатель, ни второй переключатель не замкнуты, и двигатель 14090 не реагирует на закрывающую ручку 14075. В различных вариантах инструмент 14010 может содержать по меньшей мере одну пружину, такую как, например, пружина 14076, выполненная с возможностью смещения закрывающей ручки 14075, например, в нейтральное положение.
Если обратиться к пусковому крючку 14070, пусковой механизм 14070 шарнирно соединен с корпусом 14080 исполнительного механизма с возможностью поворота, и подпружинен торсионной пружиной 14071, которая переводит пусковой механизм 14070 в положение, повернутое от корпуса 14080 исполнительного механизма. Пусковой переключатель 14305, расположенный вблизи пускового механизма 14070, находится в положении, позволяющем ему входить в контакт с пусковым механизмом 14070, когда пусковой механизм 14070 поворачивается к корпусу 14080 исполнительного механизма против действия торсионной пружины 14071. Пусковой механизм 14070 может замыкать пусковой переключатель 14305 при активации пускового механизма 14070. При замыкании пускового переключателя 14305 двигатель 14090 может работать в первом направлении, выдвигая пусковую трубку 14280 и выталкиватель 14310 скоб дистально. При высвобождении пускового механизма 14070 торсионная пружина 14071 может перемещать пусковой механизм 14070 обратно в неактивированное положение, выводя его из контакта с пусковым переключателем 14305. В этот момент пусковой переключатель 14305 может быть не замкнут, и двигатель 14090 может не реагировать на пусковой механизм 14070. В различных вариантах инструмент 14010 дополнительно может содержать предохранительную защелку 14320, шарнирно соединенную с возможностью поворота с корпусом 14080 исполнительного механизма, и которая может поворачиваться между заблокированным положением, в котором пусковой механизм 14070 не может быть активирован, и вторым положением, в котором пусковой механизм 14070 может быть активирован для замыкания пускового переключателя 14035. В любом случае двигатель 14090 может работать во втором направлении, втягивая пусковую трубку 14280 и выталкиватель 14310 скоб. В некоторых вариантах двигатель 14090 можно переключать между первым направлением поворота и вторым направлением поворота, когда пусковая система достигает конца своего пускового хода. В некоторых вариантах исполнительный механизм 14020 дополнительно может содержать кнопку реверса и переключатель, которые могут приводиться в действие для работы двигателя 14090 во втором направлении.
В свете вышеизложенного, ниже предлагается способ использования инструмента 14010, хотя можно использовать любой подходящий способ. Кроме этого, выше описано, что исполнительный механизм 14020 способен предоставить два выхода, а стволовой участок 14030 способен принять два входа для выполнения двух функций. Эти функции описаны как функция закрывания и функция пуска, но изобретение этим не ограничивается. Функции могут включать в себя любые подходящие функции, такие как, например, функция шарнирного поворота. Для применения исполнительного механизма 14020 в различных вариантах пользователь сначала может собрать исполнительный механизм 14020 со стволовым участком 14030, перемещая исполнительный механизм 14020 в сторону стволового участка 14030 перпендикулярно продольной оси исполнительного механизма 14020, как видно на ФИГ. 112. Пользователь может выравнять открытую сторону проксимального конца стволового участка 14030 с открытой стороной дистальной части исполнительного механизма 14020 и соединить эти детали вместе. Такая сборка позволяет соединить закрывающую и пусковую фиксаторные детали, как описано выше. Как также описано выше, защелки 14025 на активаторе 14020 могут захватывать буртики на корпусе 14032 стволового участка и удерживать исполнительный механизм 14020 и стволовой участок 14030 вместе с возможностью высвобождения. После сборки исполнительного механизма 14020 и стволового участка 14030 пользователь может перевести узел 14150 ползунка в первое положение, чтобы применить первую нужную функцию хирургического инструмента и прикрепленной части. Как описано выше, для перемещения узла 14150 ползунка в первое положение можно использовать кнопку 14060.
Как показано главным образом на ФИГ. 114, внутренние шлицы 14140 на ползунке 14115 могут взаимодействовать с внешними шлицами 14200 закрывающей гайки 14190, когда узел 14150 ползунка находится в первом положении. Далее пользователь может повернуть закрывающую ручку 14075, чтобы расположить упор 14050 относительно корпуса 14040 кассеты. Как описано выше, закрывающую ручку 14075 можно поворачивать в первом направлении, замыкая первый закрывающий переключатель и перемещая упор 14050 от корпуса 14040 кассеты, и во втором направлении, замыкая второй закрывающий переключатель и перемещая упор 14050 к корпусу 14040 кассеты. В некоторых вариантах замыкание первого закрывающего переключателя может приводить к замыканию схемы, приводящей в действие двигатель 14090 в первом направлении и, соответственно, замыкание второго закрывающего переключателя может приводить к замыканию схемы, приводящей в действие двигатель 14090 во втором направлении. В некоторых вариантах первый закрывающий переключатель и второй закрывающий переключатель могут обмениваться данными с микропроцессором хирургического инструмента 14010, который может управлять подачей электропитания, включая полярностью подаваемого электропитания, к двигателю 14090 на основе входного сигнала от первого закрывающего переключателя и второго закрывающего переключателя. Как описано выше, двигатель 14090 может поворачивать поворачиваемый ствол 14100, удлинительную часть 14110, ползунок 14115 и, благодаря конструкции трансмиссии 14000, закрывающую гайку 14190. Как описано выше, закрывающая гайка 14190 находится в резьбовом взаимодействии с закрывающим штоком 14230, который перемещает упор 14050 проксимально и дистально. Альтернативно закрывающий шток 14230 может выполнять какую-либо иную функцию.
Когда узел 14150 ползунка находится в первом, проксимальном положении, как показано на ФИГ. 114, двигатель 14090 может реагировать на закрывающую ручку 14075, но не на пусковой механизм 14070. По меньшей мере в одном варианте нижний опорный подшипник 14170 узла 14150 ползунка может входить в контакт и замыкать первый переключатель 14340 трансмиссии, когда узел 14150 ползунка находится в первом положении. В различных вариантах первый переключатель 14340 трансмиссии может обмениваться данными с микропроцессором хирургического инструмента 14010, который может быть выполнен с возможностью игнорировать входной сигнал от пускового переключателя 14305, когда первый переключатель 14340 трансмиссии замкнут. В таких обстоятельствах пользователь хирургического инструмента 14010 может нажать пусковой механизм 14070, но двигатель 14090 не отреагирует на это. Вместо этого, в таких обстоятельствах двигатель 14090 реагирует на первый и второй закрывающие переключатели, активируемые закрывающей ручкой 14075 для перемещения упора 14050. При перемещении узла 14150 ползунка во второе, или дистальное положение, как показано на ФИГ. 115, нижний опорный подшипник 14170 высвобождается из взаимодействия с первым переключателем 14340 трансмиссии, и первый переключатель 14340 трансмиссии возвращается в разомкнутое состояние. При перемещении узла 14150 ползунка во второе, или дистальное положение, нижний опорный подшипник 14170 может входить в контакт и замыкать второй переключатель 14350 трансмиссии. В различных вариантах второй переключатель 14350 трансмиссии может обмениваться данными с микропроцессором хирургического инструмента 14010, который может быть выполнен с возможностью игнорировать входной сигнал от закрывающей ручки 14075, когда второй переключатель 14350 трансмиссии замкнут. В таких обстоятельствах пользователь хирургического инструмента 14010 может повернуть закрывающую ручку 14075, но двигатель 14090 не отреагирует на это. Вместо этого в таких обстоятельствах двигатель 14090 реагирует на пусковой переключатель 14305, активируемый пусковым крючком 14070.
Для перемещения узла 14150 ползунка из первого положения во второе положение, как описано выше, пользователь может нажать кнопку 14060 ползунка, чтобы высвободить кнопку 14060 от стопора и переместить узел 14150 ползунка дистально во второе положение. В таких обстоятельствах ползунок 14115 может высвободиться из взаимодействия с закрывающей гайкой 14160 и входить во взаимодействие с пусковой гайкой 14260. Более конкретно, внутренние шлицы 14140 на ползунке 14115 могут высвободиться из взаимодействия с внешними шлицами 14200 на закрывающей гайке 14190 и, более того, внешние шлицы 14130 ползунка 14150 могут вступить во взаимодействие с внутренними шлицами 14270 пусковой гайки 14260. В этот момент пользователь может повернуть предохранительную защелку 14320 в разблокированное положение, чтобы подготовить пусковой механизм 14070 к пуску. Пользователь может запустить пусковую систему, повернув пусковой механизм 14070 против часовой стрелки, как показано на ФИГ. 115 в сторону корпуса 14080 исполнительного механизма. Как описано выше, пусковой механизм 14070 может вступить в контакт с пусковым переключателем 14305, который может подавать электропитание на двигатель 14090. Аналогично первой конфигурации трансмиссии 14000, двигатель 14090 может поворачивать поворачиваемый ствол 14100, удлинительную часть 14110 и ползунок 14115; однако во второй конфигурации трансмиссии 14000 ползунок 14115 поворачивает пусковую гайку 14260 и поступательно перемещает пусковую трубку 14280.
В различных вариантах электропитание на инструмент 14010 может подаваться от внешнего источника питания. В некоторых вариантах можно использовать одну или более батарей, расположенных внутри исполнительного механизма 14020. Батареи могут представлять собой, например, литиевые аккумуляторные батареи. В некоторых вариантах батареи и двигатель 14090 могут располагаться в герметичном съемном корпусе, который может допускать очистку, стерилизацию и многоразовое использование.
После использования исполнительного механизма 14020 в ходе хирургической операции пользователь может разобрать исполнительный механизм 14020 от стволового участка 14030. Для разборки исполнительного механизма 14020 от стволового участка 14030 пользователь может нажать на защелки 14025. После этого исполнительный механизм 14020 может подвергаться очистке, стерилизации и многократному использованию или утилизации. Аналогично, стволовой участок 14030 может подвергаться очистке, стерилизации и многократному использованию или утилизации. В случае многократного использования стволового участка 14030 в корпус 14040 кассеты можно повторно загрузить скобки. В некоторых вариантах корпус 14040 кассеты может включать в себя сменную кассету, которую можно использовать для повторной загрузки скоб. В различных вариантах различные части исполнительного механизма 14020 также могут быть объединены в герметизированном, разделенном на отсеки модуле, который можно легко вставить в корпус 14080 исполнительного механизма и удалить из него. Например, двигатель 14090, поворачиваемый ствол 14100, удлинительная часть 14110, узел 14150 ползунка, закрывающая гайка 14190, закрывающий шток 14230, пусковая гайка 14260 и пусковая трубка 14280 могут быть объединены в модульный узел, который может быть извлечен из корпуса 14080 исполнительного механизма. Кроме этого, детали исполнительного механизма 14020 могут входить в отдельные собираемые модули. Например, электронные части исполнительного механизма 14020, такие как двигатель 14090 и батарея, могут составлять один модуль, а механические узлы, содержащие вращающиеся и/или перемещающиеся части, могут составлять второй модуль. В таких обстоятельствах первый модуль можно стерилизовать способами, отличными от второго модуля. Такие ситуации могут способствовать применению для второго модуля, например, гамма-излучения, которое может не подходить для стерилизации первого модуля.
Предусмотрены различные дополнения к исполнительному механизму 14020. Например, функции микропроцессора можно использовать для обнаружения положений конца рабочего хода закрывающей и/или пусковой системы и подачи двигателю 14090 сигнала на остановку закрывающего хода и/или пускового хода. Функции микропроцессора также можно использовать для определения типа узла ствола, который прикреплен к исполнительному механизму 14020. Например, исполнительный механизм 14020 может включать в себя датчик, находящийся в связи для передачи сигнала с микропроцессором в исполнительном механизме 14020, сигнализирующий, что к исполнительному механизму 14020 присоединен стволовой узел кругового сшивающего инструмента или что к исполнительному механизму 14020 присоединен стволовой узел линейного сшивающего инструмента. Предусматривается, что исполнительный механизм 14020 может обеспечить питание многих типов хирургических инструментов, требующих, например, по меньшей мере одного или, возможно, двух входных продольных перемещений. В различных вариантах исполнительный механизм 14020 может обеспечивать работу, например, кругового сшивающего инструмента, линейного сшивающего инструмента, прямоугольного сшивающего инструмента, ножниц, зажимов и/или других типов хирургических инструментов.
Дополнительные модификации исполнительного механизма 14020 включают в себя использование нескольких двигателей так, что можно увеличить число функций, которые может применять исполнительный механизм 14020. Некоторые модификации исполнительного механизма 14020 включают в себя выполнение более чем двух функций с использованием одного двигателя. Например, предусмотрена третья позиция узла 14150 ползунка, в которой третья функция реализуется третьим встроенным механизмом. В некоторых вариантах, в дополнение к указанному выше, узел 14150 ползунка может иметь третье положение, например, положение покоя или нейтральное положение, в котором двигатель 14090 не реализует никакой функции.
Дополнительные модификации могут включать в себя применение электрических и/или магнитных способов поступательного перемещения ползунка 14115 из одной позиции в другую. Например, для перемещения ползунка 14115 из одной позиции в другую может использоваться соленоид. Пружина может предварительно переводить ползунок 14115 в исходное положение, а подача питания на соленоид может перемещать ползунок 14115 из исходного положения во второе положение.
Хирургический сшивающий инструмент 15010 показан на ФИГ. 117 и 118. Аналогично указанному выше, инструмент 15010 может содержать рукоятку, закрывающую систему, выполненную с возможностью перемещения упора 15090 между открытым положением (ФИГ. 117) и закрытым положением (ФИГ. 118) относительно кассеты 15080 со скобками и, кроме этого, пусковую систему, выполненную с возможностью размещения скоб из кассеты 15080 со скобками и разрезания ткани, захваченной между упором 15090 и кассетой 15080 со скобками. Корпус рукоятки хирургического инструмента на ФИГ. 117 и 118 удален, чтобы показать содержащиеся внутри компоненты. Также аналогично указанному выше, закрывающая система инструмента 15010 может содержать закрывающий двигатель 15110, закрывающий блок шестерен, содержащий шестерню 15160 винта закрывающего привода, функционально соединенную с закрывающим двигателем 15110, и винт 15170 закрывающего привода, функционально соединенный с шестерней 15160 винта закрывающего привода. В различных вариантах закрывающий двигатель 15110 может удерживаться рамой 15125 двигателя, которая кроме этого может удерживать с возможностью поворота шестерню 15160 винта закрывающего привода и ходовой винт 15170 закрывающего привода. Закрывающая система дополнительно может включать в себя закрывающую кнопку 15065, выполненную с возможностью входить в контакт и замыкать закрывающий переключатель 15285, который при замыкании может приводить в действие закрывающий двигатель 15110. В некоторых вариантах, в дополнение к указанному выше, закрывающая кнопка 15065 может быть выполнена с возможностью входить в контакт с закрывающий переключателем, выполненным с возможностью приводить в действие закрывающий двигатель 15110 в первом направлении и закрывать упор 15090, и открывающим переключателем, выполненным с возможностью приводить в действие закрывающий двигатель 15110 во втором направлении и открывать упор 15090.
В дополнение к указанному выше, закрывающая система также может содержать каретку 15180, выполненную с возможностью взаимодействия с упором 15090 и перемещения упора 15090 между открытым положением (ФИГ. 117) и закрытым положением (ФИГ. 118). Каретка 15180 может включать в себя участок 15175 резьбовой гайки, имеющий резьбовое соединение с резьбовой частью ходового винта 15170 закрывающего привода. Каретка 15180 может не иметь возможности поворота вместе с ходовым винтом 15170 закрывающего привода так, что поворот ходового винта 15170 закрывающего привода может поступательно перемещать каретку 15180 проксимально и дистально, в зависимости от направления поворота ходового винта 15170 закрывающего привода. При повороте ходового винта 15170 закрывающего привода в первом направлении посредством закрывающего двигателя 15110, ходовой винт 15170 закрывающего привода может смещать каретку 15180 дистально, закрывая упор 15090. Соответственно, при повороте ходового винта 15170 закрывающего привода во втором, противоположном направлении посредством закрывающего двигателя 15110, ходовой винт 15170 закрывающего привода может смещать каретку 15180 проксимально, открывая упор 15090. Каретка 15180 может по меньшей мере частично располагаться вокруг канала 15070 кассеты, и в различных вариантах может фиксироваться с возможностью скольжения к каналу 15070 кассеты. Как показано преимущественно на ФИГ. 118, канал 15070 кассеты может включать в себя один или более пазов 15195, образованных в его противоположных сторонах, которые выполнены с возможностью принимать с возможностью скольжения один или более выступов 15185, проходящих внутрь от каретки 15080. В других ситуациях канал 15070 может содержать выступы 15185, а каретка 15080 может содержать пазы 15195. В любом случае пазы 15195 и выступы 15185 могут быть выполнены с возможностью ограничения перемещения каретки 15180, например, по продольной или по существу продольной траектории.
Каретка 15080 может перемещаться из первого, проксимального положения (ФИГ. 117) во второе, дистальное положение (ФИГ. 118) для закрывания упора 15090. Каретка 15080 может включать в себя поперечную планку 15081, выполненную с возможностью входить в контакт и перемещения упора 15090 при перемещении каретки 15080 относительно упора 15090. В различных вариантах упор 15090 может быть соединен с каналом 15070 кассеты с возможностью поворота вокруг шарнира 15200, и упор 15090 может вращаться вокруг шарнира 15200 посредством поперечной планки 15081 каретки. Более конкретно, поперечная планка 15181 каретки может быть выполнена с возможностью входить в контакт с верхней или кулачковой поверхностью 15092 упора 15090 и скользить по этой верхней поверхности 15092 по мере того как каретка 15080 перемещается дистально для поворота упора 15090 в сторону кассеты 15080, расположенной внутри канала 15070 кассеты. В некоторых вариантах дистальный конец 15091 упора 15090 может входить в контакт с дистальным концом 15081 кассеты 15080, когда упор 15090 достигает полностью закрытого положения. Каретка 15180 может дистально выдвигаться до тех пор, пока не достигнет своего крайнего дистального положения, и/или упор 15090 не достигнет своего полностью закрытого положения, показанного на ФИГ. 118. В различных обстоятельствах каретка 15180 может входить в контакт и замыкать датчик конца рабочего хода при достижении кареткой 15180 крайнего дистального положения. В некоторых вариантах датчик конца рабочего хода может находиться в связи для передачи сигнала с микропроцессором хирургического инструмента 15010. При замыкании датчика конца рабочего хода кареткой 15180, микропроцессор может прерывать подачу питания на закрывающий двигатель 15110 и останавливать выдвигание каретки 15180.
Как описано выше, поперечная планка 15181 каретки 15180 может двигать по кулачку упор 15090 к кассете 15080 со скобками, толкая кулачковую поверхность 15092 вниз. Упор 15090 дополнительно может содержать защелкивающий штифт 15210, проходящий от его боковых сторон, который может приниматься в пазах 15215, образованных в боковых сторонах канала 15070 кассеты, при повороте упора 15090 к кассете 15080 со скобками. В различных вариантах защелкивающий штифт 15210 может входить в контакт с закрытыми концами пазов 15215, например, при достижении упором 15090 закрытого положения. В некоторых вариантах упор 15090 может находиться в закрытом положении, а защелкивающий штифт 15210 может не контактировать с закрытыми концами пазов 15215. В некоторых вариантах закрывающая система может содержать один или более фиксаторов 15190, выполненных с возможностью взаимодействия с защелкивающим штифтом 15210 и/или перемещения упора 15090 ближе к кассете 15080 со скобками. Защелки 15190 могут соединяться с возможностью поворота с каналом 15070 кассеты при помощи шарнирного штифта 15191, и могут поворачиваться вокруг оси шарнира, взаимодействуя с защелкивающим штифтом 15210. В некоторых вариантах защелки 15190 могут захватывать защелкивающий штифт 15210 и размещать защелкивающий штифт 15210 вплотную к закрытым концам пазов 15215. Каждая защелка 15190 может содержать плечо 15192 защелки, которое может скользить по защелкивающему штифту 15210 и толкать защелкивающий штифт 15210 вниз при повороте защелки 15190 дистально в закрытое положение. Каждое плечо защелки 15192 может образовывать по меньшей мере часть паза 15193 защелки, которая может быть выполнена с возможностью принимать защелкивающий штифт 15210 при перемещении защелок 15190 в активированные положения. Плечи 15192 защелок и закрытые концы пазов 15215 в процессе взаимодействия могут захватывать и/или удерживать защелкивающий штифт 15210 в нужном положении.
В дополнение к указанному выше, защелки 15190 могут перемещаться между незафиксированным положением (ФИГ. 117) и зафиксированным положением (ФИГ. 118) посредством каретки 15180 при дистальном выдвигании каретки 15180. Защелки 15190 могут перемещать упор 15090 в полностью закрытое положения на то расстояние, на которое упор 15090 не перемещен в полностью закрытое положение посредством поперечной планки 15181. В различных вариантах каретка 15180 может включать в себя дистальные кулачковые поверхности 15182, которые могут взаимодействовать с защелками 15190 при выдвижении каретки 15180 дистально. По меньшей мере в одном таком варианте каждая кулачковая поверхность 15182 может содержать, например, косую или наклонную поверхность. При повороте ходового винта 15170 закрывающего привода во втором направлении и проксимальном втягивании каретки 15180 посредством ходового винта 15170 закрывающего привода защелки 15190 могут вернуться в неактивированные положения. В различных вариантах инструмент 15010 может дополнительно содержать, например, одну или несколько смещающих пружин 15195, которые могут быть выполнены с возможностью поворота защелок 15190 в проксимальном направлении, когда дистальные кулачковые поверхности 15182 втягиваются от защелок 15190. Каждая защелка 15190 может включать в себя отверстие 15194, образованное с возможностью принимать первый конец пружины 15195. Второй конец каждой пружины 15195 может соединяться с пружинной опорой 15079, проходящей от канала 15070 кассеты. При дистальном повороте защелок 15190 из незафиксированного положения в зафиксированное положение посредством каретки 15180, как описано выше, пружины 15195 могут упруго растягиваться так, что при втягивании каретки 15180 пружины 15195 могу упруго вернуться в исходное состояние, таким образом прикладывая к защелкам 15090 усилие, например, через отверстия 15194. В любом случае, когда защелки 15190 вернулись в незафиксированное положение, упор 15090 можно снова переместить относительно кассеты 15080 со скобками.
Как описано выше, поперечная планка 15181 каретки 15180 может входить в контакт с кулачковой поверхностью 15092 упора 15090 и поворачивать упор 15090 в сторону кассеты 15080 со скобками. Каретка 15180 также может быть выполнена с возможностью поворота упора 15090 от кассеты 15080 со скобками. По меньшей мере в одном таком варианте на упоре 15090 может быть образована вторая кулачковая поверхность 15093, которая может входить в контакт с поперечной планкой 15181 каретки 15080 при проксимальном перемещении каретки 15080 ходовым винтом 15170 закрывающего привода. Следует понимать, что закрывающая кулачковая поверхность 15092 может быть образована на первой стороне от шарнирного штифта 15200, а открывающая кулачковая поверхность 15093 может быть образована на второй, противоположной стороне от шарнирного штифта 15200. Открывающая кулачковая поверхность 15093 может проходить под углом относительно закрывающей кулачковой поверхности 15092. В различных вариантах поперечная планка 15181 может входить в контакт и скользить относительно открывающей кулачковой поверхности 15093 при втягивании каретки 15180. Открывающая кулачковая поверхность 15093 может быть выполнена так, что степень или величина открытия упора 15090 относительно кассеты 15080 со скобками зависит от расстояния, на которое поперечная планка 15181 втягивается в проксимальном направлении. Например, если поперечная планка 15181 втягивается проксимальнее шарнира 15200 на первое расстояние, поперечная планка 15181 может вращать упор 15090 вверх, от кассеты 15080 со скобками, на первую величину, а если поперечная планка 15181 втягивается проксимальнее шарнира 14200 на второе расстояние, большее чем первое расстояние, то поперечная планка 15181 может вращать упор 15090 вверх, от кассеты 15080 со скобками, на вторую величину, большую, чем первая величина.
Вышеописанная закрывающая система может позволить пользователю хирургического инструмента вращать упор 15090 между открытым и закрытым положением без необходимости ручных манипуляций с упором 15090. Вышеописанная закрывающая система также может фиксировать или блокировать упор 15090 в закрытом положении автоматически, не требуя применения отдельного исполнительного механизма. Если пользователь не удовлетворен положением ткани между упором 15090 и кассетой 15080 со скобками, когда упор 15090 находится в закрытом положении, пользователь снова может открыть упор 15090, изменить положение упора 15090 и кассеты 15080 со скобками относительно ткани, а затем снова закрыть упор 15090. Пользователь может открывать и закрывать упор 15090 столько раз, сколько нужно, прежде чем активировать пусковую систему инструмента 15010. Пусковая система может содержать пусковой двигатель 15120, установленный на раме 15125 двигателя, узел шестерен пускового привода, функционально соединенный с пусковым двигателем 15120, и содержащий пусковую шестерню 15240, шестерню 15250 ходового винта пускового привода и ходовой винт 15260 пускового привода. Аналогично указанному выше, узел шестерен пускового привода и/или ходовой винт 15260 пускового привода могут удерживаться с возможностью поворота на раме 15125 двигателя. Пусковой привод дополнительно может содержать пусковой механизм 15055, выполненный с возможностью замыкания пускового переключателя 15290 при нажатии пускового механизма 15055 с целью приведения в действие пускового двигателя 15120. При приведении в действие пускового двигателя 15120 в первом направлении с поворотом ходового винта 15260 пускового привода в первом направлении, пусковой привод может размещать скобки, хранящиеся с возможностью извлечения в кассете 15080 со скобками, и разрезать ткань, захваченную между упором 15090 и кассетой 15080 со скобками. При приведении в действие пускового двигателя 15120 во втором направлении с поворотом ходового винта 15260 пускового привода во втором, противоположном направлении, пусковой привод может втягиваться. После этого упор 15090 можно снова открыть для удаления ткани из пространства между упором 15090 и кассетой со скобками 15080. В некоторых вариантах может быть не нужно втягивать пусковой привод для открытия упора 15090. В таких вариантах пусковой привод может не взаимодействовать с упором 15090 при своем дистальном выдвижении. По меньшей мере в одном таком варианте пусковой привод может входить в кассету 15080 со скобками и выталкивать из нее скобки, а режущая кромка скальпеля может продвигаться между кассетой 15080 со скобками и упором 15090 и разрезать ткань. Пусковой привод может не блокировать упор 15090 в закрытом положении, хотя предусмотрены варианты осуществления, в которых пусковой привод может блокировать упор 15090 в закрытом положении. В таких вариантах осуществления, например, может использоваться двутавровый элемент, который может взаимодействовать с упором 15090 и кассетой со скобками 15080 и удерживать их в нужном положении относительно друг друга по мере дистального продвижения двутаврового элемента.
Инструмент 15010 может получать питание от внешнего источника питания и/или внутреннего источника питания. Кабель может входить в корпус 15080 исполнительного механизма и подавать питание, например, от внешнего источника питания. Одна или более батарей, таких как, например, батарея 15400, могут располагаться внутри рукоятки инструмента 15010, подавая питание, например, от внутреннего источника. Инструмент 15010 дополнительно может содержать один или более индикаторов, таких как, например, светодиодный индикатор 15100, которые могут указывать рабочее состояние инструмента 15010. Светодиодный индикатор 15100 может работать аналогичным или сходным образом, что и, например, вышеописанный Светодиодный индикатор 11100. Светодиодный индикатор 15100 может находиться в связи для передачи сигнала с микроконтроллером инструмента 15010, который может располагаться, например, на печатной плате 15500.
В предыдущих хирургических инструментах использовалась закрывающая система с ручным приводом, выполненная с возможностью перемещения упора между открытым положением и закрытым положением. В различных вариантах осуществления, описанных в настоящем документе, используется закрывающая система с приводом, выполненная с возможностью перемещения упора между открытым положением и закрытым положением относительно фиксированной кассеты со скобками. Предусмотрены и другие варианты осуществления, в которых упор может быть фиксированным, а закрывающая система с приводом может перемещать кассету со скобками между закрытым и открытым положениями. В любом случае двигатель закрывающей системы может задавать тканевый зазор между упором и кассетой со скобками. В различных вариантах закрывающая система хирургического инструмента является отдельной и отличной от пусковой системы. В других вариантах осуществления закрывающая и пусковая системы могут представлять собой единое целое. Когда закрывающая система и пусковая система раздельны и различаются, пользователь хирургического инструмента может оценить положение упора и кассеты со скобками относительно сшиваемой и разрезаемой ткани перед запуском пусковой системы.
Как описано выше, пусковой эффектор хирургического инструмента, такой как, например, пусковой эффектор 1000, может быть выполнен с возможностью зажимания ткани между своей браншей 1040 упора и кассетой 1060 со скобками. Когда бранша 1040 упора находится в закрытом положении, между браншей 1040 упора и кассетой 1060 со скобками образуется зазор для ткани. В некоторых вариантах концевой эффектор 1000 может подходить для применения с тонкой тканью, толстой тканью и тканью промежуточной толщины между тонкой и толстой тканью. Наиболее тонкая и наиболее толстая ткань, к работе с которыми подходит концевой эффектор 1000, могут образовывать диапазон толщины ткани для концевого эффектора 1000. В различных вариантах система хирургического инструмента может включать в себя рукоятку и несколько концевых эффекторов, которые могут быть присоединены к рукоятке, причем один или более концевых эффекторов могут иметь разные диапазоны толщины ткани. Например, первый концевой эффектор может иметь первый диапазон толщины ткани, а второй концевой эффектор может иметь второй диапазон толщины ткани, отличный от первого диапазона толщины ткани. В некоторых вариантах первый диапазон толщины ткани и второй диапазон толщины ткани могут быть раздельными, тогда как в других вариантах первый диапазон толщины ткани и второй диапазон толщины ткани могут частично перекрываться. Системы хирургических инструментов могут использовать любое подходящее количество концевых эффекторов, имеющих разные диапазоны толщины ткани, причем некоторые из диапазонов толщины ткани могут по меньшей мере частично перекрываться, а другие диапазоны толщины ткани могут совершенно не перекрываться.
В различных вариантах, в дополнение к указанному выше, кассета со скобками концевого эффектора, такая как, например, кассета 1060 со скобками концевого эффектора 1000, может быть сменной. В различных вариантах кассета 1060 со скобками может быть выполнена с возможностью съемной фиксации внутри нижней бранши 1020 концевого эффектора 1000. После съемной фиксации платформа или контактирующая с тканью поверхность кассеты 1060 со скобками может не перемещаться или по меньшей мере существенно не перемещаться относительно нижней бранши 1020. Таким образом, при перемещении бранши 1040 упора в сторону закрытого положения между браншей 1040 упора и поверхностью платформы кассеты 1060 со скобками может образовываться фиксированное расстояние или тканевый зазор. Для изменения этого фиксированного расстояния кассету 1060 со скобками можно удалить из нижней бранши 1020, и можно зафиксировать внутри нижней бранши 1020 другую кассету со скобками с возможностью высвобождения. Поверхность платформы другой кассеты со скобками может быть выполнена с возможностью образования тканевого зазора, отличного от зазора, обеспечиваемого кассетой 1060 со скобками. Предусмотрены варианты осуществления, в которых система хирургического инструмента включает в себя рукоятку, множество концевых эффекторов, которые могут быть собраны на рукоятке, и множество кассет со скобками, которые могут быть вставлены с возможностью замены в концевые эффекторы. Такой вариант осуществления позволяет пользователю выбрать концевой эффектор, пригодный для использования с некоторым диапазоном толщины ткани, а кассета со скобками, выбранная для применения с концевым эффектором, позволяет отрегулировать или точно настроить толщину ткани, которую может сшить концевой эффектор. В некоторых вариантах первая кассета со скобками системы хирургического инструмента может включать в себя первый тип скоб, а вторая кассета со скобками может включать в себя второй тип скоб. Например, первая кассета со скобками может включать в себя скобки, имеющие первую высоту в несформированном, или неактивированном, состоянии, а вторая кассета со скобками может включать в себя скобки, имеющие вторую высоту в несформированном, или неактивированном, состоянии, отличную от первой высоты.
Полное описание:
патента США № 5,403,312, озаглавленного «ЭЛЕКТРОХИРУРГИЧЕСКОЕ ГЕМОСТАТИЧЕСКОЕ УСТРОЙСТВО», выданного 4 апреля 1995;
патента США № 7,000,818, озаглавленного «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ РАЗДЕЛЬНЫЕ ОБОСОБЛЕННЫЕ ЗАКРЫВАЮЩУЮ И ПУСКОВУЮ СИСТЕМЫ», выданного 21 февраля 2006 г.;
патента США № 7,422,139, озаглавленного «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ И ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ», выданного 9 сентября 2008 г.;
патента США № 7,464,849, озаглавленного «ЭЛЕКТРОМЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЗАКРЫВАЮЩЕЙ СИСТЕМОЙ И КОМПОНЕНТАМИ ВЫРАВНИВАНИЯ УПОРА», выданного 16 декабря 2008 г.;
патента США № 7,670,334, озаглавленного «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ШАРНИРНЫЙ КОНЦЕВОЙ ЭФФЕКТОР», выданного 2 марта 2010 г.;
патента США № 7,753,245, озаглавленного «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ ИНСТРУМЕНТЫ», выданного 13 июля 2010 г.;
патента США № 8,393,514, озаглавленного «ИЗБИРАТЕЛЬНО ФУНКЦИОНИРУЮЩАЯ ИМПЛАНТИРУЕМАЯ КАССЕТА С КРЕПЕЖНЫМИ ЭЛЕМЕНТАМИ», выданного 12 марта 2013 г.;
заявки на патент США с сер. № 11/343,803, озаглавленной «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ВОЗМОЖНОСТЬЮ ЗАПИСИ», поданной 31 января 2006 г., в настоящее время патент США № 7,845,537;
заявки на патент США № 12/031,573, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ РЧ-ЭЛЕКТРОДЫ», поданной 14 февраля 2008 г.;
заявки на патент США с сер. № 12/031,873, озаглавленной «КОНЦЕВЫЕ ЭФФЕКТОРЫ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СШИВАЮЩЕГО ИНСТРУМЕНТА», поданной 15 февраля 2008 г., в настоящее время патент США № 7,980,443;
заявки на патент США с сер. № 12/235,782, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ», поданной 23 сентября 2008 г., в настоящее время патент США № 8,210,411;
заявки на патент США с сер. № 12/249,117, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ АППАРАТ С ЭЛЕКТРОПИТАНИЕМ И ВОЗМОЖНОСТЬЮ РУЧНОГО ВТЯГИВАНИЯ ПУСКОВОЙ СИСТЕМЫ», поданной 10 октября 2008 г., в настоящее время патент США № 8,608,045;
заявки на патент США с сер. № 12/647,100, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ И ЭЛЕКТРИЧЕСКИМ ИСПОЛНИТЕЛЬНЫМ УЗЛОМ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ», поданной 24 декабря 2009 г., в настоящее время патент США № 8,220,688;
заявки на патент США с сер. № 12/893,461, озаглавленной «КАССЕТА СО СКОБКАМИ», поданной 29 сентября 2012 г., в настоящее время публикация заявки на патент США № 2012/0074198;
заявки на патент США с сер. № 13/036,647, озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ», поданной 28 февраля 2011 г., в настоящее время патент США № 8,561,870;
заявки на патент США с сер. № 13/118,241, озаглавленной «ХИРУРГИЧЕСКИЕ СШИВАЮЩИЕ ИНСТРУМЕНТЫ С ПОВОРАЧИВАЕМЫМИ КОНФИГУРАЦИЯМИ ДЛЯ РАЗМЕЩЕНИЯ СКОБ», в настоящее время публикация заявки на патент США № 2012/0298719;
заявки на патент США с сер. № 13/524,049, озаглавленной «ШАРНИРНО ПОВОРАЧИВАЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД», поданной 15 июня 2012 г., в настоящее время публикация заявки на патент США № 2013/0334278;
заявки на патент США с сер. № 13/800,025, озаглавленной «СИСТЕМА ДАТЧИКА ТОЛЩИНЫ ТКАНИ В КАССЕТЕ СО СКОБКАМИ», поданной 13 марта 2013 г.;
заявки на патент США с сер. № 13/800 067, озаглавленной «СИСТЕМА ДАТЧИКА ТОЛЩИНЫ ТКАНИ В КАССЕТЕ СО СКОБКАМИ», поданной 13 марта 2013 г.;
публикации заявки на патент США № 2007/0175955, озаглавленной «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ С МЕХАНИЗМОМ БЛОКИРОВКИ ЗАКРЫВАЮЩЕГО СПУСКОВОГО МЕХАНИЗМА», поданной 31 января 2006 г.; и
публикации заявки на патент США № 2010/0264194, озаглавленной «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ШАРНИРНО ПОВОРАЧИВАЕМЫМ КОНЦЕВЫМ ЭФФЕКТОРОМ», поданной 22 апреля 2010 г., в настоящее время патент США № 8,308,040, включено в настоящий документ путем ссылки.
Как описано ранее, датчики могут быть выполнены с возможностью обнаружения и сбора данных, связанных с хирургическим устройством. Процессор обрабатывает данные, полученные от датчика(ов).
Процессор может быть выполнен с возможностью исполнения команд функциональной логики. Процессор может представлять собой любой из нескольких одноядерных или многоядерных процессоров, известных в данной области техники. Память может представлять собой энергозависимое или энергонезависимое устройство хранения, выполненное с возможностью хранения постоянной и временной (рабочей) копии команд функциональной логики.
В различных вариантах осуществления функциональная логика может быть выполнена с возможностью обработки данных, связанных с перемещениями, как описано выше. В различных вариантах осуществления функциональная логика может быть выполнена с возможностью выполнения первичной обработки и передачи данных в компьютер, содержащий приложение для определения и генерации инструкций. Для этих вариантов осуществления функциональная логика может быть дополнительно выполнена с возможностью приема информации от главного компьютера и передачи данных обратной связи в главный компьютер. В альтернативных вариантах осуществления функциональная логика может быть выполнена с возможностью принятия на себя более важной роли в приеме информации и формировании обратной связи. В любом случае, независимо от того, выполняет ли функциональная логика это самостоятельно, или реагируя на инструкции компьютера, функциональная логика может быть дополнительно выполнена с возможностью управления и передачи данных обратной связи пользователю.
В различных вариантах осуществления функциональная логика может быть реализована в инструкциях, поддерживаемых архитектурой системы команд (ISA) процессора, или на языках более высокого уровня, компилируемых в поддерживаемую архитектуру ISA. Функциональная логика может содержать один или более логических блоков или модулей. Функциональная логика может быть реализована объектно-ориентированным способом. Функциональная логика может быть выполнена с возможностью исполнения многозадачным и/или многопоточным способом. В других вариантах осуществления функциональная логика может быть реализована в аппаратном обеспечении, таком как вентильная матрица.
В различных вариантах осуществления коммуникационный интерфейс может быть выполнен с возможностью облегчения коммуникации между периферическим устройством и компьютерной системой. Коммуникация может включать в себя передачу собранных биометрических данных, связанных с положением, позой и/или перемещением части(ей) тела пользователя на главный компьютер, и передачу данных, связанных с тактильной обратной связью от главного компьютера к периферийному устройству. В различных вариантах осуществления коммуникационный интерфейс может представлять собой проводной или беспроводной коммуникационный интерфейс. Например, проводной коммуникационный интерфейс может включать в себя, без ограничений, интерфейс универсальной последовательной шины (Universal Serial Bus, USB). Например, беспроводной коммуникационный интерфейс может включать в себя, без ограничений, интерфейс Bluetooth.
В различных вариантах осуществления процессор может быть заключен в один корпус с функциональной логикой. В различных вариантах осуществления процессор может быть установлен в один корпус вместе с функциональной логикой с образованием однокорпусной системы (System-in-Package, SiP). В различных вариантах осуществления процессор может быть интегрирован в один кристалл интегральной схемы с функциональной логикой. В различных вариантах осуществления процессор может быть установлен вместе с функциональной логикой с образованием однокристальной системы (System on Chip, SoC).
Различные варианты осуществления могут быть описаны в настоящем документе в общем контексте исполняемых инструкций для компьютера, такие как программное обеспечение, программные модули и/или подсистемы, исполняемые процессором. По существу, программное обеспечение, программные модули и/или подсистемы включают в себя любой программный элемент, созданный для выполнения конкретных операций или реализации определенных абстрактных типов данных. Программное обеспечение, программные модули и/или подсистемы могут включать в себя процедуры, программы, объекты, компоненты, структуры данных и т.п., выполняющие конкретные задачи и реализующие определенные абстрактные типы данных. Реализация компонентов и методов программного обеспечения, программных модулей и/или подсистем может храниться и/или передаваться посредством какой-либо формы машиночитаемого носителя. В этом отношении машиночитаемый носитель может представлять собой любой существующий носитель или носители для хранения информации, доступные для компьютерного устройства. Некоторые варианты осуществления также могут использоваться в распределенных вычислительных средах, в которых операции выполняются одним или несколькими удаленными устройствами, соединенными коммуникационной сетью. В распределенной вычислительной среде программное обеспечение, программные модули и/или подсистемы могут размещаться как в локальных, так и в удаленных компьютерных хранилищах, включая устройства памяти. Для хранения информации и инструкций, исполняемых процессором, можно применять оперативное запоминающее устройство (ОЗУ) или другое динамическое устройство хранения. Память также можно использовать для хранения временных переменных или другой промежуточной информации при выполнении инструкций, исполняемых процессором.
Хотя некоторые варианты осуществления могут быть показаны и описаны как содержащие функциональные компоненты, программное обеспечение, подсистемы и/или модули, выполняющие различные операции, следует понимать, что такие компоненты или модули могут быть реализованы при помощи одного или более аппаратных компонентов, программных компонентов и/или их сочетания. Функциональные компоненты, программное обеспечение, подсистемы и/или модули могут быть реализованы, например, посредством логики (например, инструкций, данных и/или кода), предназначенной для исполнения логическим устройством (например, процессором). Такая логика может храниться на одном или нескольких машиночитаемых носителях, внутренних или внешних по отношению к логическому устройству. В других вариантах осуществления функциональные компоненты, такие как программное обеспечение, двигатели и/или модули, могут быть реализованы элементами аппаратного обеспечения, которые могут включать в себя процессоры, микропроцессоры, схемы, элементы схем (например, транзисторы, резисторы, конденсаторы, индукционные катушки и т.д.), интегральные схемы, специализированные интегральные схемы (СИС), программируемые логические устройства (ПЛУ), процессоры для обработки цифровых сигналов (DSP), программируемые пользователем вентильные матрицы (ППВМ), логические вентили, регистры, полупроводниковые устройства, кристаллы, микрокристаллы, наборы кристаллов и т.д.
Примеры программного обеспечения, подсистем и/или модулей могут включать в себя программные компоненты, программы, приложения, компьютерные программы, прикладные программы, системные программы, машинные программы, программное обеспечение операционных систем, промежуточное программное обеспечение, встроенное программное обеспечение, программные модули, стандартные программы, подпрограммы, функции, методы, процедуры, программные интерфейсы, интерфейсы прикладного программирования (API), наборы инструкций, вычислительный код, компьютерный код, сегменты кода, сегменты компьютерного кода, слова, значения, символы или любые их комбинации. Выбор реализации варианта осуществления с использованием аппаратных элементов и/или программных элементов может зависеть от любого числа факторов, таких как нужная скорость вычислений, величина мощности, устойчивость к нагреву, бюджет вычислительного цикла, скорость ввода данных, скорость вывода данных, ресурсы памяти, скорость шины данных и другие ограничения конструкции или производительности.
Один или более модулей, описанных в настоящем документе, могут содержать одно или более встроенных приложений, реализованных в качестве встроенной программы, программного обеспечения, аппаратного обеспечения или любой их комбинации. Один или более модулей, описанных в настоящем документе, могут содержать различные исполняемые модули, такие как программное обеспечение, программы, данные, драйверы, интерфейсы прикладных программ и так далее. Встроенное программное обеспечение может храниться в памяти контроллера 2016 и/или контроллера 2022, которая может содержать энергонезависимую память, например, доступную только для чтения память с побитовым маскированием (ПЗУ) или флеш-память. В различных вариантах хранение встроенной программы в ПЗУ может высвободить флэш-память. Энергонезависимая память может содержать другие типы памяти, в том числе, например, программируемое ПЗУ (ППЗУ), стираемое программируемое ПЗУ (СППЗУ), электрически стираемое программируемое ПЗУ (ЭСППЗУ) или оперативное запоминающее устройство (ОЗУ) с резервированием от аккумуляторной батареи, например динамическое ЗУ (ДЗУ), динамическую оперативную память c удвоенной скоростью передачи данных и/или синхронную динамическую оперативную память.
В некоторых случаях различные варианты осуществления могут быть реализованы в виде промышленного изделия. Промышленное изделие может включать в себя машиночитаемый носитель информации, способный хранить логику, инструкции и/или данные для выполнения различных операций одного или более вариантов осуществления. Например, в различных вариантах осуществления, производственное изделие может представлять собой магнитный диск, оптический диск, флеш-память или встроенное ПО, содержащее инструкции компьютерной программы, подходящие для выполнения процессором общего назначения или специализированным процессором. Однако указанные примеры осуществления изобретения не ограничиваются данной областью использования.
Функции различных функциональных элементов, логических блоков, модулей и элементов схем, описанные в настоящем документе, могут быть реализованы в общем контексте исполняемых компьютером инструкций, таких как программное обеспечение, управляющие модули, логика и/или логические модули, выполняемые процессором. По существу, программное обеспечение, управляющие модули, логика и/или логические модули представляют собой любой программный элемент, предназначенный для выполнения конкретных операций. Программное обеспечение, управляющие модули и/или логические модули могут содержать процедуры, программы, объекты, компоненты, структуры данных и т.п., выполняющие конкретные задачи и реализующие определенные абстрактные типы данных. Реализация программного обеспечения, управляющих модулей, логики и/или логических модулей и методов может храниться и/или передаваться посредством какой-либо формы машиночитаемого носителя. В этом отношении машиночитаемый носитель может представлять собой любой существующий носитель или носители для хранения информации, доступные для компьютерного устройства. Некоторые варианты осуществления также могут использоваться в распределенных вычислительных средах, в которых операции выполняются одним или несколькими удаленными устройствами, соединенными коммуникационной сетью. В распределенной вычислительной среде программное обеспечение, управляющие модули логика и/или логические модули могут размещаться как в локальных, так и в удаленных компьютерных хранилищах, включая в устройствах памяти.
Кроме того, следует понимать, что варианты осуществления, описанные в настоящем документе, показывают примеры реализации, и что функциональные элементы, логические блоки, модули и элементы схем могут быть реализованы различными другими способами, также согласующимися с описанными вариантами осуществления. Кроме того, операции, выполняемые такими функциональными элементами, логическими блоками, модулями и элементами схем, могут объединяться и/или разделяться в конкретной реализации, и могут выполняться большим или меньшим числом компонентов или модулей. Как будет очевидно специалисту в данной области при чтении настоящего изложения, каждый из описанных и показанных в настоящем документе индивидуальных вариантов осуществления имеет дискретные компоненты и особенности, которые могут быть легко отделены или объединены с элементами любого из других нескольких аспектов, не отступая от сферы действия настоящего изобретения. Любой описанный способ может осуществляться в описанном порядке событий или в любом другом логически возможном порядке.
Следует заметить, что любые ссылки на фразы «один вариант осуществления» или «вариант осуществления» означают, что конкретный элемент, структура или характеристика, описанные в связи с этим вариантом осуществления, содержится по меньшей мере в одном варианте осуществления. Все фразы «в одном варианте осуществления» или «в одном аспекте», появляющиеся в данной спецификации, не обязательно относятся к одному варианту осуществления.
Если иное не указано специально, следует понимать, что такие термины как «обработка», «вычисление», «расчет», «определение» и т.п., относятся к действию и/или процессам компьютера или вычислительной системы, или сходного электронного компьютерного устройства, такого как процессор общего назначения, процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) или другое программируемое логическое устройство, логический элемент на дискретных компонентах или транзисторах, дискретные аппаратные компоненты или любое их сочетание, каковое устройство предназначено для выполнения функций, описанных в настоящем документе, и которое осуществляет манипуляции и/или преобразования данных, представленных в виде физических величин (например, электронных) внутри регистров и/или памяти в другие данные, сходным образом представленные внутри памяти, регистров или иных устройств для хранения, передачи и отображения информации.
Следует отметить, что варианты осуществления могут быть описаны выражениями «соединенный» и «подсоединенный», а также их производными. Такие термины не являются синонимами. Например, некоторые варианты осуществления могут описываться с использованием терминов «подсоединенный» и/или «соединенный», указывающих на то, что два или более элемента находятся в непосредственном физическом или электрическом контакте друг с другом. Однако термин «сочлененный» также может обозначать, что два или более элемента косвенно контактируют друг с другом, но все же взаимодействуют или кооперируют свою работу друг с другом. Применительно к программным элементам, например, термин «соединенный» может относиться к интерфейсам, интерфейсам сообщений, интерфейсам прикладного программирования (API), обмену сообщениями и т.п.
Следует учитывать, что любой патент, публикация или другой материал описания, полностью или частично включенный в настоящий документ путем ссылки, включены в него только в той степени, в которой включенный материал не противоречит существующим определениям, заявлениям или другим материалам описания, представленным в настоящем описании. Таким образом, в необходимой степени раскрытие, как явно представлено в настоящем документе, имеет преимущество перед любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, указанная как включенная в настоящий документ путем ссылки, но противоречащая существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включена в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Описанные варианты осуществления имеют применение в обычных эндоскопических и открытых хирургических приборах, а также применяются при автоматических операциях.
Варианты устройств, описанные здесь, могут быть разработаны для утилизации после однократного использования, или для многократного использования. Варианты устройств, в одном или обоих случаях, могут подготавливаться для повторного использования. Подготовка для повторного применения может включать любую комбинацию стадий разборки устройства, затем очистки или замены конкретных фрагментов и последующей повторной сборки. В частности, варианты устройств могут быть разобраны для замены любого количества конкретных деталей или частей в любой комбинации. После очистки и (или) замены определенных деталей устройство можно собрать для последующего использования в специальном отделении, выполняющем подготовку к повторному использованию или силами хирургической бригады перед проведением хирургического вмешательства. Специалистам в данной области будет понятно, что подготовка устройства к повторному применению может включать различные методики разборки, чистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
В качестве примера, описанные здесь варианты могут быть осуществлены до операции. Во-первых, новый или использованный инструмент может быть получен и при необходимости обработан. Прибор может быть стерилизован. Согласно одному способу стерилизации инструмент помещают в закрытый и герметичный контейнер, например пластиковый пакет или пакет Тайвек (TYVEK). Контейнер и прибор могут помещаться в поле излидеи, которое может проникнуть в контейнер, например, гамма-излучение, рентгеновские лучи или электроны высоких энергий. Излучение способно убить бактерии, находящиеся на поверхности устройства и в емкости. Стерилизованный инструмент может быть сохранен в стерильном контейнере. Герметичный контейнер может держать инструмент стерильным, пока не возникнет необходимость его использования в медицинском учреждении. Устройство также можно стерилизовать с применением любой другой методики, известной в данной области, включая, среди прочего, бета- или гамма-излучение, этиленоксид или пар.
Специалисту в данной области будет понятно, что описанные в настоящем документе компоненты (например, операции), устройства, объекты и сопровождающее их описание применяются в качестве примеров для концептуальной ясности и что допускаются различные модификации конфигурации. Следовательно, приведенные в настоящем документе конкретные примеры и сопроводительное описание считаются представителями их более общих классов. Как правило, применение любого конкретного примера считается представляющим его класс, и неисключение конкретных компонентов (например, операций), устройств и объектов не следует считать ограничивающими.
В отношении применения по существу любых случаев множественного и/или единственного числа для терминов в настоящем документе, специалисты в данной области могут изменять множественное на единственное и/или единственное на множественное в соответствии с требованиями контекста и/или сферой применения. Различные комбинации единственного/множественного числа для ясности в настоящем документе явным образом не указаны.
Описанный в настоящем документе объект изобретения иногда иллюстрирует различные компоненты, содержащиеся внутри различных других компонентов или соединенные с ними. Следует понимать, что такие показанные архитектуры являются лишь примерами и что фактически могут быть реализованы многие другие архитектуры с такой же функциональностью. В концептуальном смысле любая конфигурация компонентов для достижения такой же функциональности практически «связывается» так, чтобы достичь желаемой функциональности. Таким образом, любые два компонента, скомбинированные в настоящем документе для достижения конкретной функциональности, могут рассматриваться как «связанные» друг с другом так, чтобы достигалась желаемая функциональность, независимо от архитектур или промежуточных компонентов. Аналогичным образом любые два компонента, соединенные таким образом, можно рассматривать как «функционально соединенные» или «функционально связанные» друг с другом для достижения желаемой функциональности, и любые два компонента, которые могут быть связаны таким образом, также могут рассматриваться как «функционально соединяемые» друг с другом для достижения желаемой функциональности. Конкретные примеры функционально соединяемых компонентов включают, помимо прочего, физически сопрягаемые, и/или физически взаимодействующие компоненты, и/или беспроводно взаимодействующие, и/или логически взаимодействующие, и/или логически взаимодействующие компоненты.
Некоторые аспекты могут быть описаны выражениями «сочлененный» и «соединенный», а также их производными. Следует понимать, что такие термины не являются синонимами. Например, некоторые аспекты могут описываться с использованием термина «соединенный», обозначающего, что два или более элемента находятся в непосредственном физическом или электрическом контакте друг с другом. В другом примере, некоторые аспекты могут описываться с использованием термина «сочлененный», обозначающего, что два или более элемента находятся в непосредственном физическом или электрическом контакте. Однако термин «сочлененный» также может обозначать, что два или более элемента косвенно контактируют друг с другом, но все же взаимодействуют или кооперируют свою работу друг с другом.
В некоторых примерах, один или более компонентов могут быть описаны в настоящем документе как «выполненный с возможностью», «выполненный для», «функционирующий/функциональный для», «приспособленный/адаптированный», «способный», «согласующийся/соответствующий» и т.д. Специалистам в данной области техники будет понятно, что термин может охватывать активные и/или неактивные компоненты и/или компоненты в режиме ожидания, если в контексте не требуется иное.
Хотя были показаны и описаны конкретные аспекты настоящего объекта изобретения, описанного в этом документе, специалистам в данной области техники будет очевидно, что на основании описанных в настоящем документе способов могут быть выполнены изменения и модификации, и такие изменения и модификации не будут являться отхождением от объекта изобретения, описанного в настоящем документе, и его расширенных аспектов, а, следовательно, прилагаемые пункты формулы изобретения призваны охватить все такие изменения и модификации, которые составляют истинную сущность и объем объекта изобретения, описанного в настоящем документе. Специалистам в данной области техники будет понятно, что в общем термины, используемые в настоящем документе, и особенно в прилагаемых пунктах формулы изобретения (например, основное содержание прилагаемых пунктов формулы изобретения), как правило, подразумевают их использование в «открытом» смысле (например, термин «в том числе» должен интерпретироваться как «в том числе без ограничения», термин «имеющий» должен интерпретироваться как «имеющий по меньшей мере», термин «содержит» должен интерпретироваться как «содержит без ограничения» и т.д.). К тому же специалистам в данной области техники будет понятно, что если в конкретной мере подразумевается использование ссылки на представленный пункт формулы изобретения, то такое предназначение будет явно изложено в таком пункте формулы изобретения, а в отсутствии такой ссылки такое предназначение не подразумевается. Например, для простоты понимания, заметим, что в следующей прилагаемой формуле изобретения могут применяться вступительные фразы «по меньшей мере один» или «один и более» с целью представления изложения пункта формулы изобретения. Однако использование таких фраз не должно восприниматься как указание на то, что введение упоминания в единственном числе относит любой конкретный пункт формулы изобретения, содержащий такое упоминание, только к пунктам, содержащим только одно такое упоминание, даже если тот же пункт включает в себя вводные фразы «один или более» или «по меньшей мере один», и упоминание в единственном числе следует обычно интерпретировать как означающее «по меньшей мере один» или «один или более»; это же относится и к упоминаниям с использованием определений «этот», «данный» и «настоящий».
Кроме того, даже если определенное количество представленного изложения пункта формулы изобретения цитируется явно, специалистам в данной области техники будет понятно, что такое цитирование, как правило, должно быть интерпретировано в виду по меньшей мере, приведенного количества (например, простое цитирование фразы «два изложения» без других модификаторов, как правило, означает, по меньшей мере, два изложения или два или более изложений). Кроме того, в случаях использования традиционных аналогов фразы «по меньшей мере, один из A, B, C и т.д.» как правило подразумевается, что специалисты в данной области техники смогут понять традиционность аналогии (например, «система, имеющая по меньшей мере один из A, B, и C» будет содержать, без ограничения, системы, которые имеют только А, только B, только C, и B вместе, и А и С вместе, и В и С вместе и/или А, В, и С вместе и т.д.). В случаях использования традиционных аналогов фразы «по меньшей мере один из A, B или C и т.д.» как правило подразумевается, что специалисты в данной области техники смогут понять традиционность аналогии (например, «система, имеющая по меньшей мере один из A, B или C» будет содержать, без ограничения, системы, которые имеют только А, только B, только C, ии B вместе, и А и С вместе, и В и С вместе и/или А, В, и С вместе и т.д.). Кроме того, специалистам в данной области техники будет понятно, что, как правило, дизъюнктивное слово и/или фраза, представляя два или более альтернативных термина, будь то в описании изобретения, формуле изобретения или на чертежах, должна быть понята, как имеющая в виду возможности включения одного из терминов, любого из терминов или обоих этих терминов, если контекст не требует иного. Например, фраза «A или B» обычно будет подразумевать включение возможностей «A» или «B» или «A и B».
В отношении прилагаемых пунктов формулы изобретения специалисты в данной области поймут, что упомянутые в них операции могут по существу выполняться в любом порядке. Также, хотя различные операционные потоки представлены в виде последовательности(-ей), следует понимать, что различные операции могут выполняться в другом порядке, отличном от показанного, или же могут выполняться одновременно. Примеры таких альтернативных порядков могут включать в себя перекрывающийся, перемежающийся, прерываемый, перестраиваемый, инкрементный, предварительный, дополнительный, одновременный, обратный или другие варианты порядка, если контекст не требует иного. Более того, предполагается, что такие термины как «чувствительный к», «связанный с» или другие прилагательные, связанные с прошедшим временем, по существу не исключают таких вариантов, если контекст не требует иного.
В целом использование описанных в настоящем документе принципов настоящего изобретения обеспечивает получение множества преимуществ. Представленное выше описание одного или более вариантов осуществления было представлено для целей иллюстрации и описания. Считается, что описание не является исчерпывающим или ограничивающим точной раскрытым вариантом. В свете всего вышесказанного возможны модификации и варианты. Один или более вариантов осуществления были выбраны и описаны для иллюстрации принципов и способов практической реализации, посредством чего позволяя специалисту в данной области использовать различные варианты осуществления изобретения, а также с различными модификациями, соответствующими конкретной предполагаемой сфере применения. Предполагается, что полный объем изобретения определен в прилагаемых пунктах формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА (ВАРИАНТЫ) | 2014 |
|
RU2678366C2 |
| РАЗЪЕМНАЯ КОНСТРУКЦИЯ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2665132C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПИТАНИЕМ | 2014 |
|
RU2653625C2 |
| ЛИНЕЙНЫЙ ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПИТАНИЕМ | 2014 |
|
RU2677531C2 |
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА | 2014 |
|
RU2693674C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2690895C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ (ВАРИАНТЫ) И СИСТЕМА ЭЛЕКТРОПИТАНИЯ ДЛЯ ПОДАЧИ ЭЛЕКТРОПИТАНИЯ НА ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2014 |
|
RU2685464C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОРПУС ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ И УЗЕЛ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2669856C2 |
| СИСТЕМЫ ОБНАРУЖЕНИЯ КОНЦЕВОГО ЭФФЕКТОРА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2685463C2 |
| МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, ПРИВОДИМЫЕ В ДЕЙСТВИЕ ДВИГАТЕЛЕМ, С КОНСТРУКЦИЯМИ ИНДИКАЦИИ СТАТУСА | 2014 |
|
RU2651066C2 |
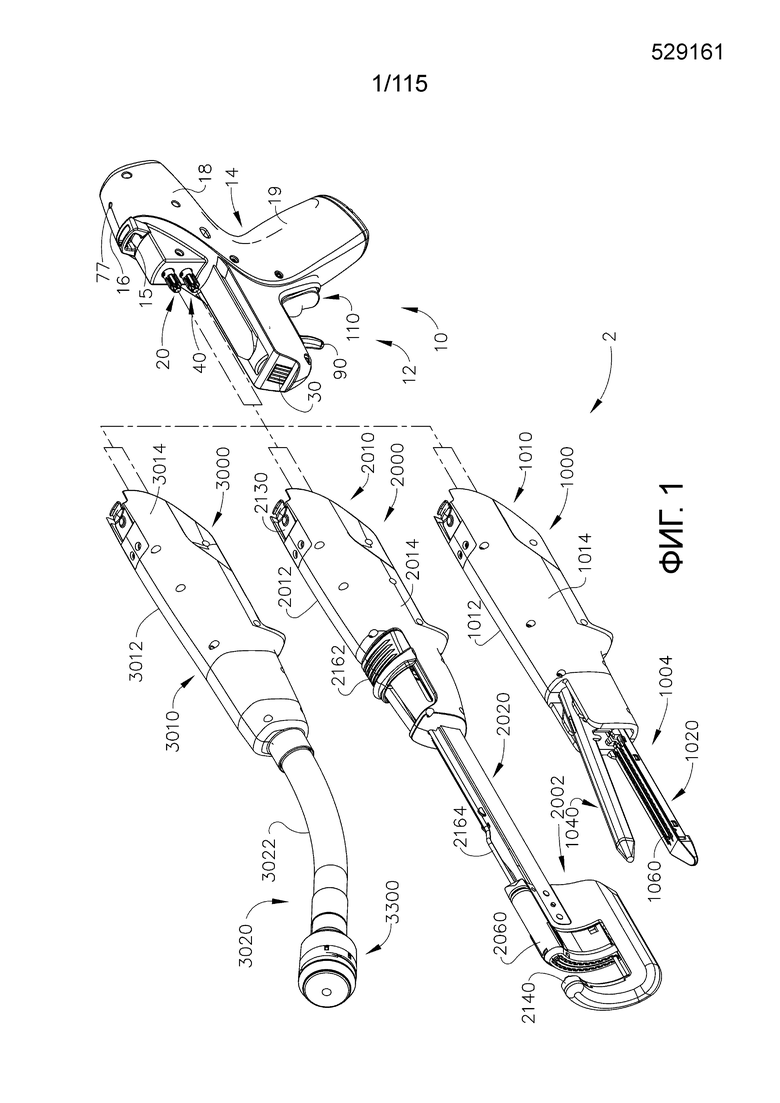
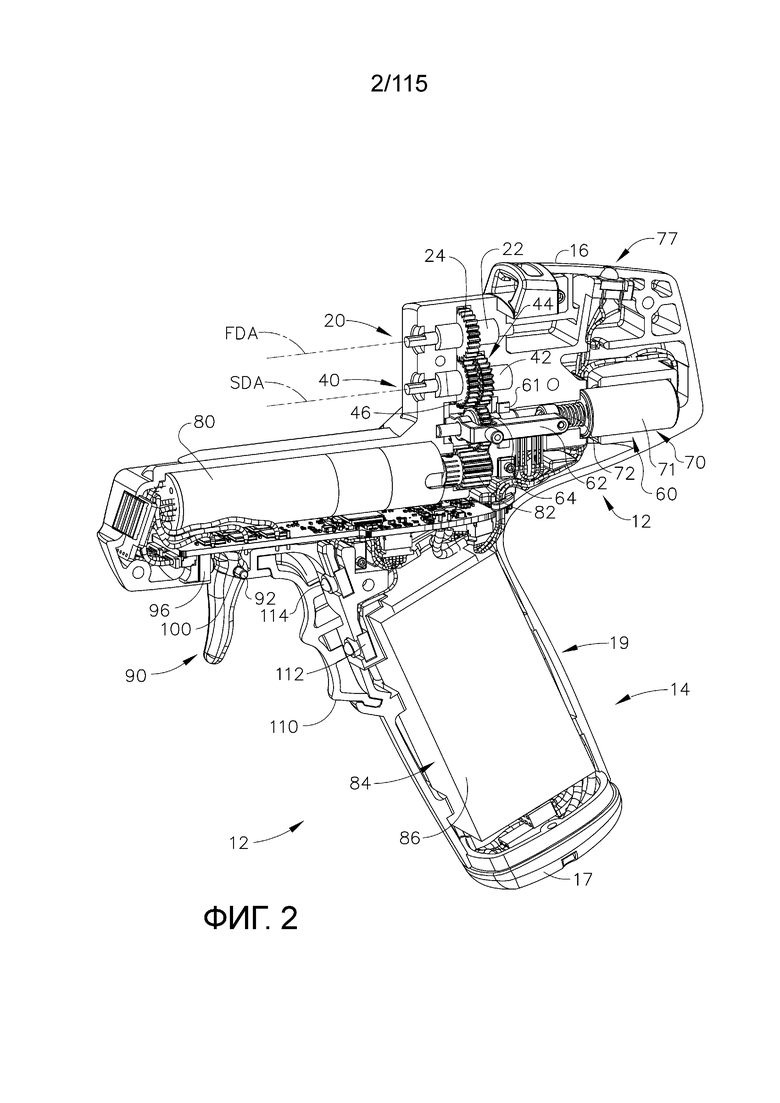
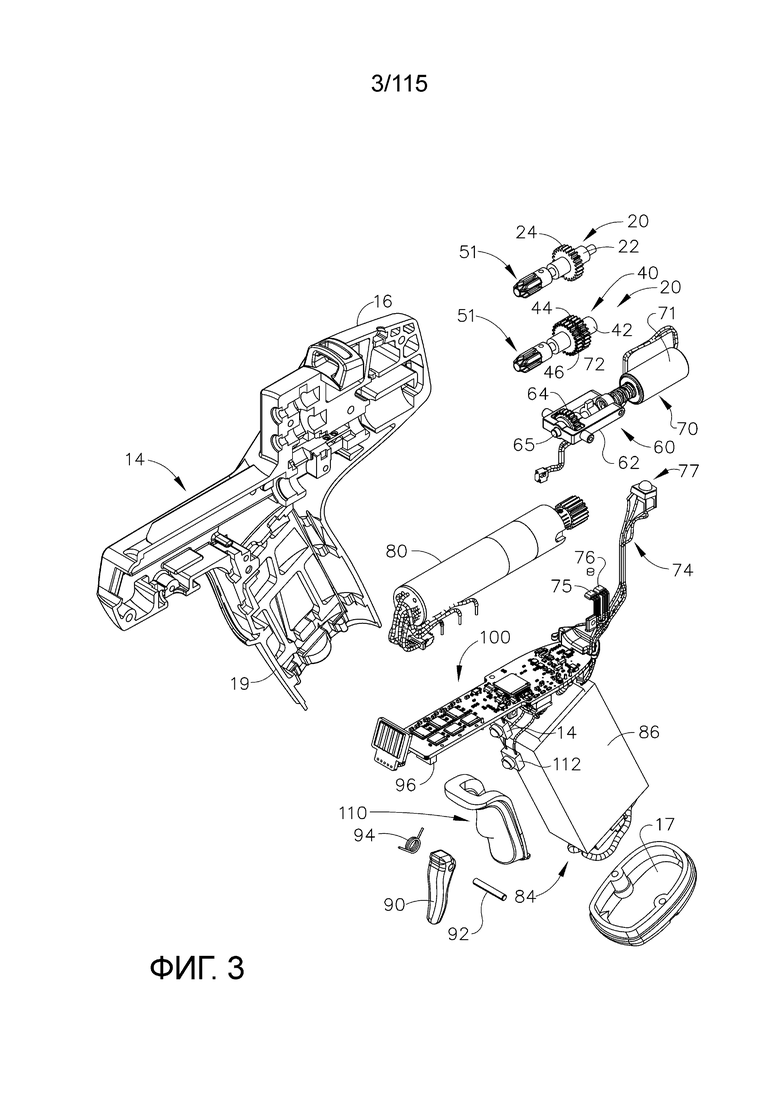
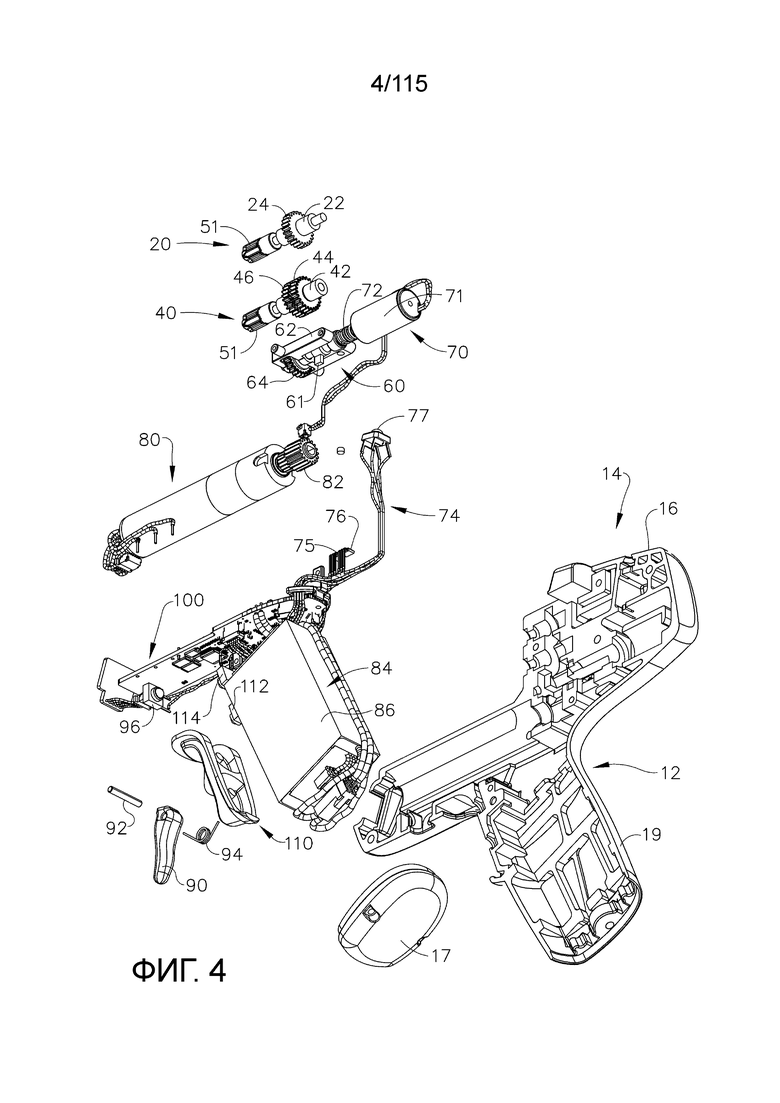
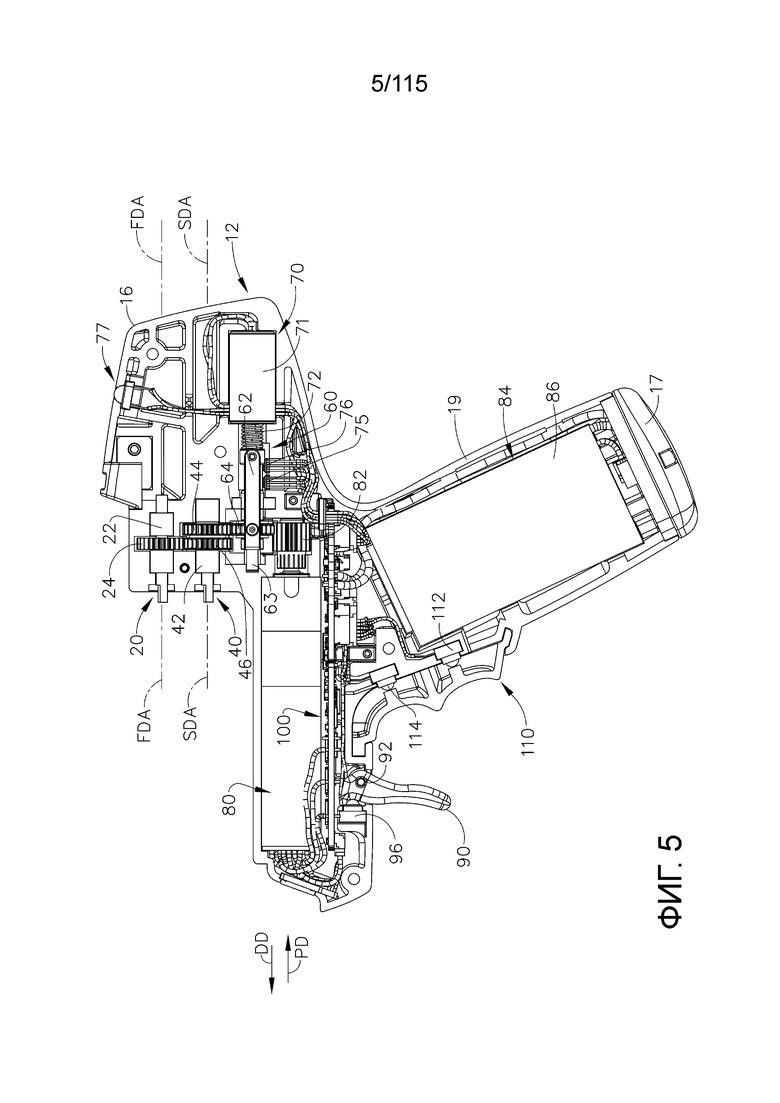
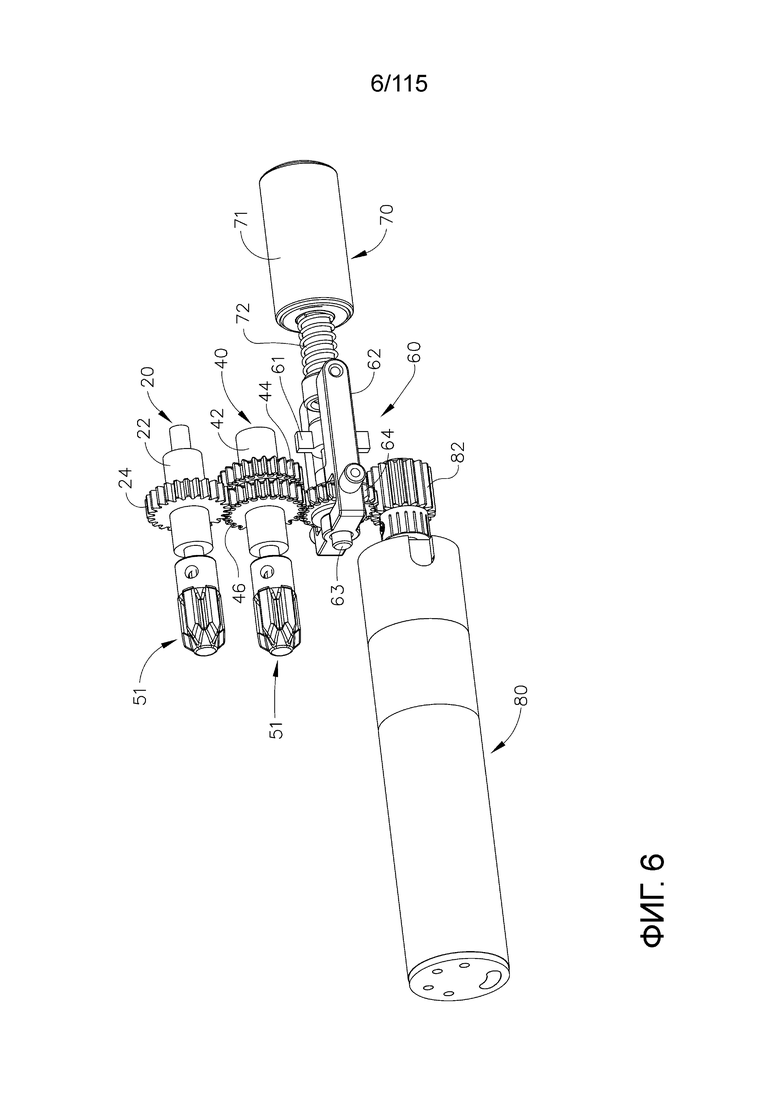
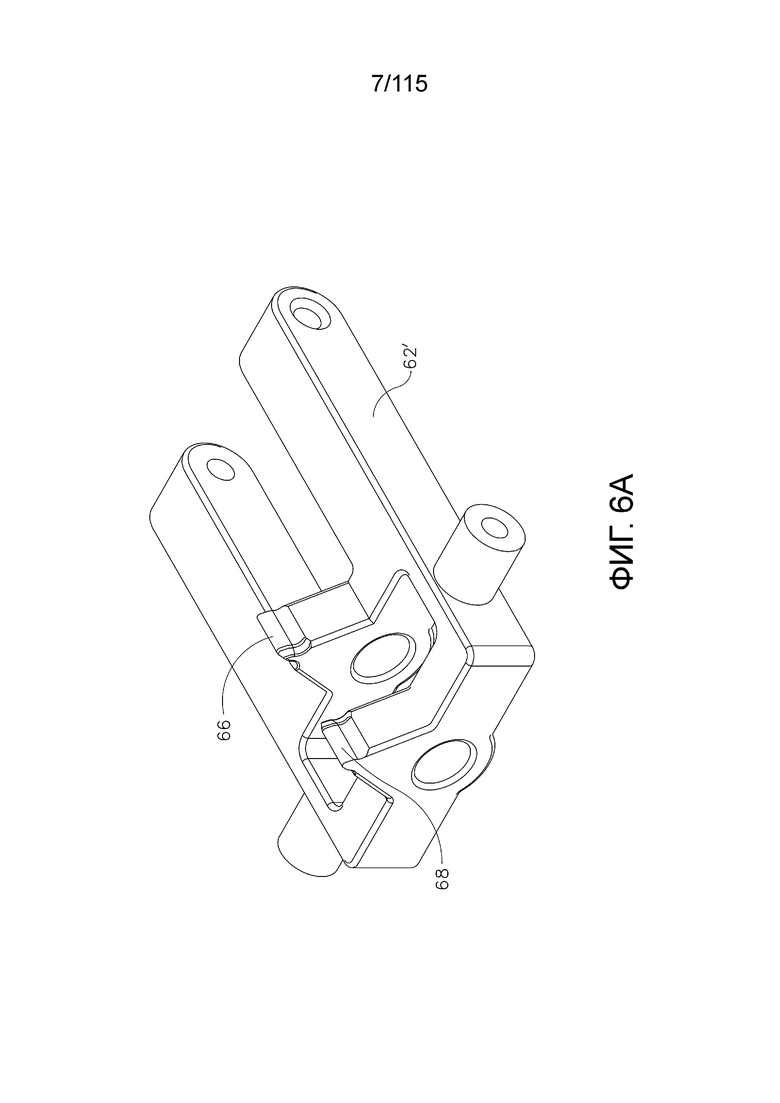
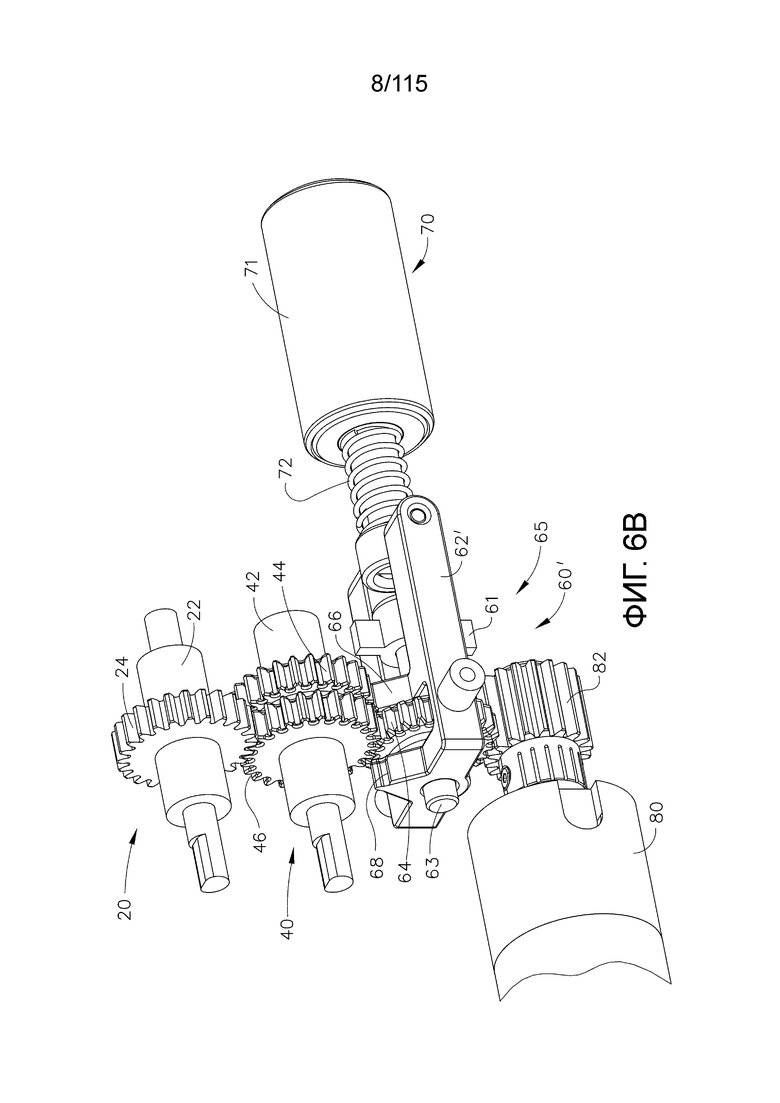

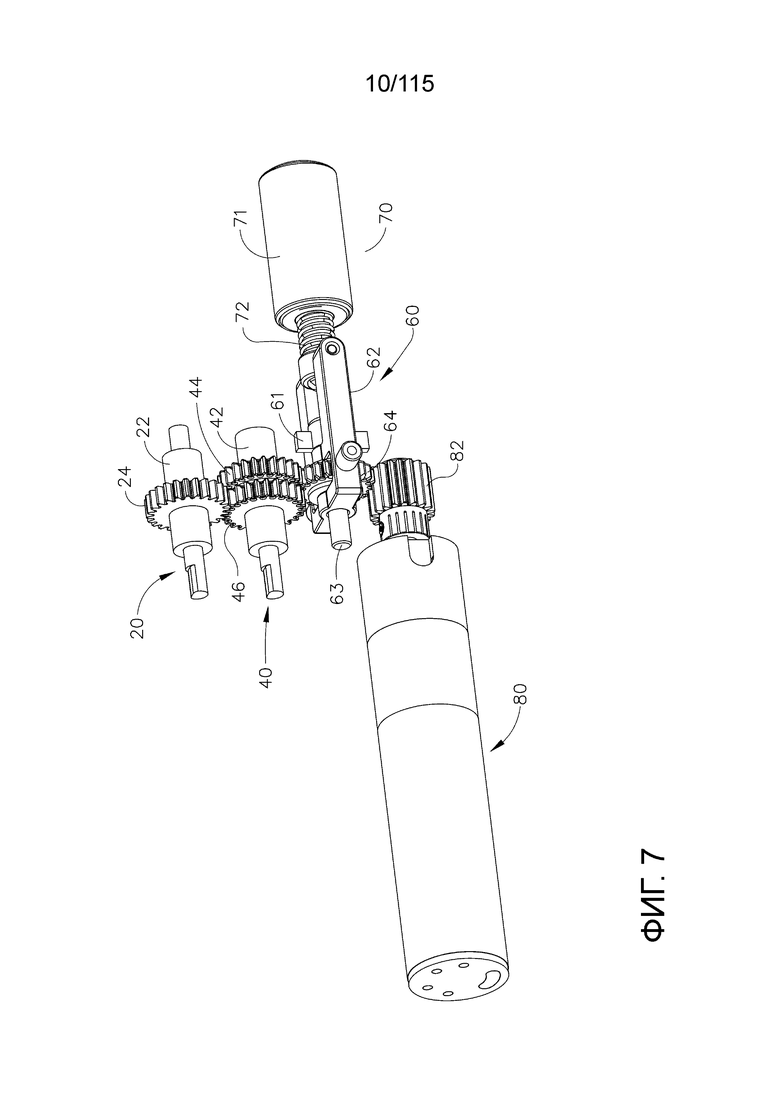
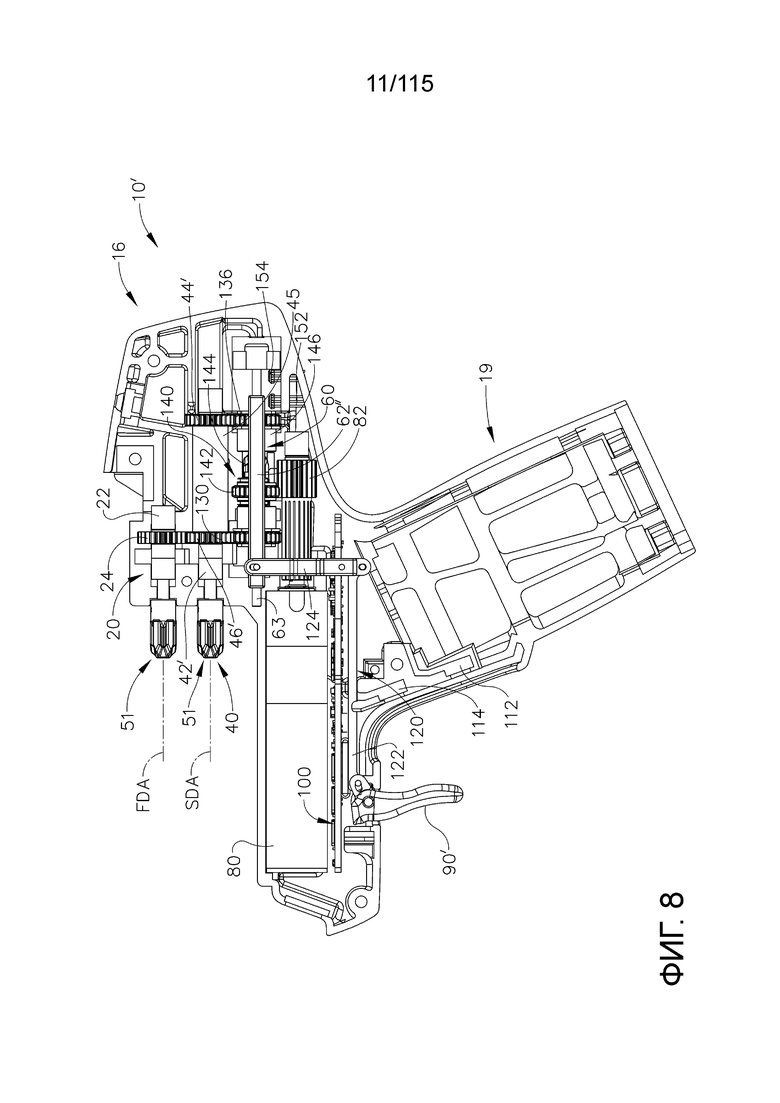
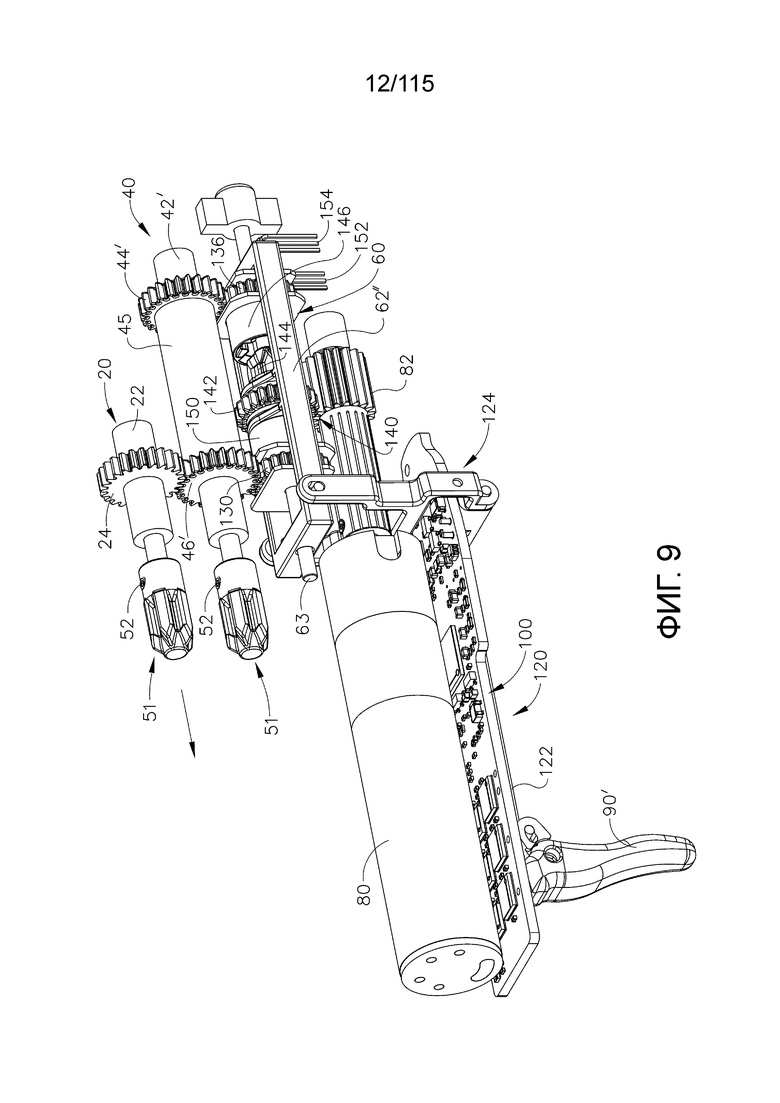
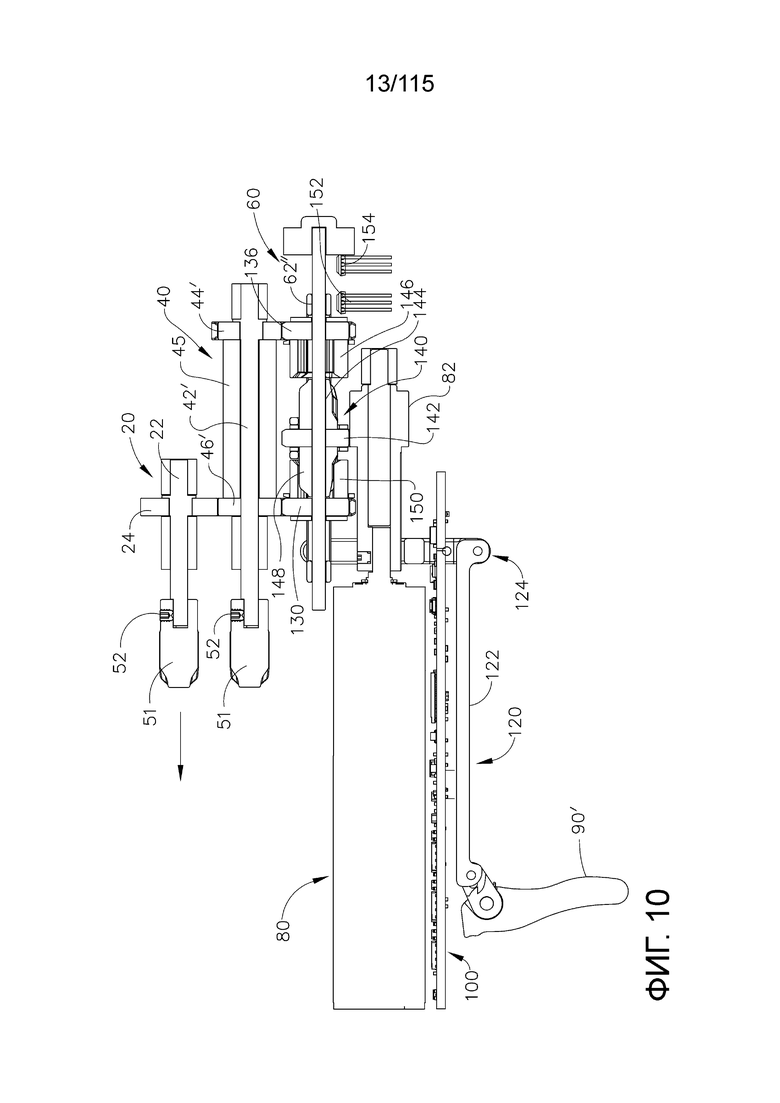
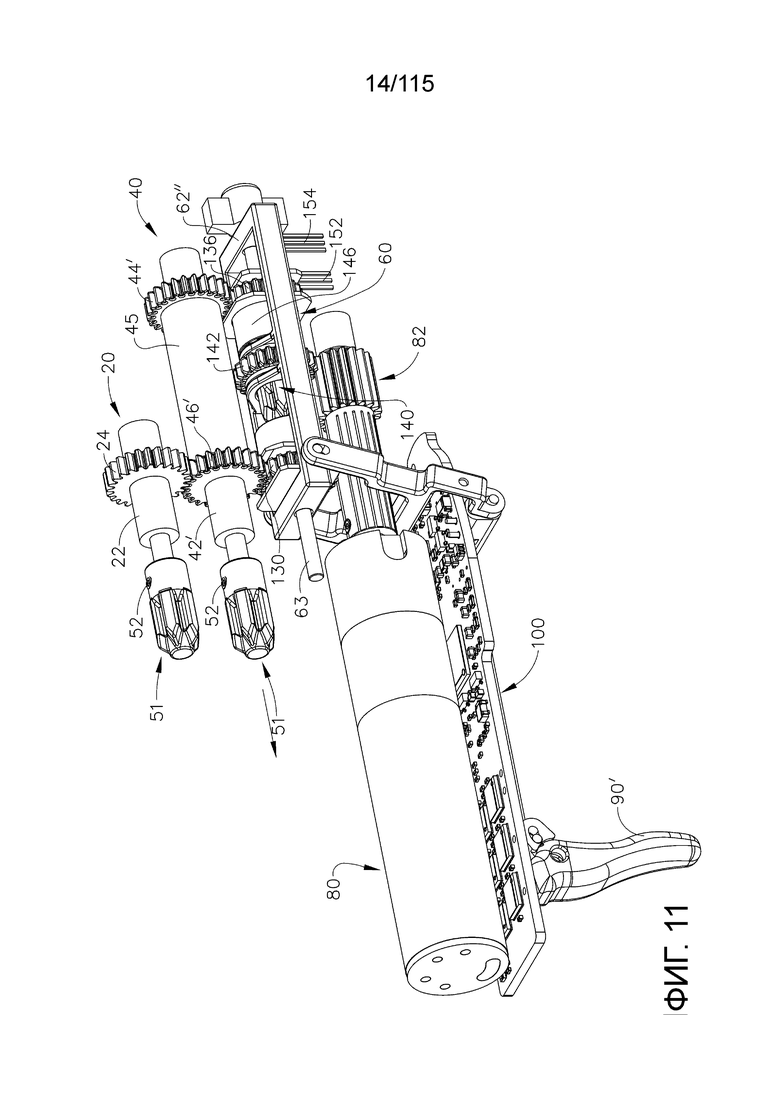
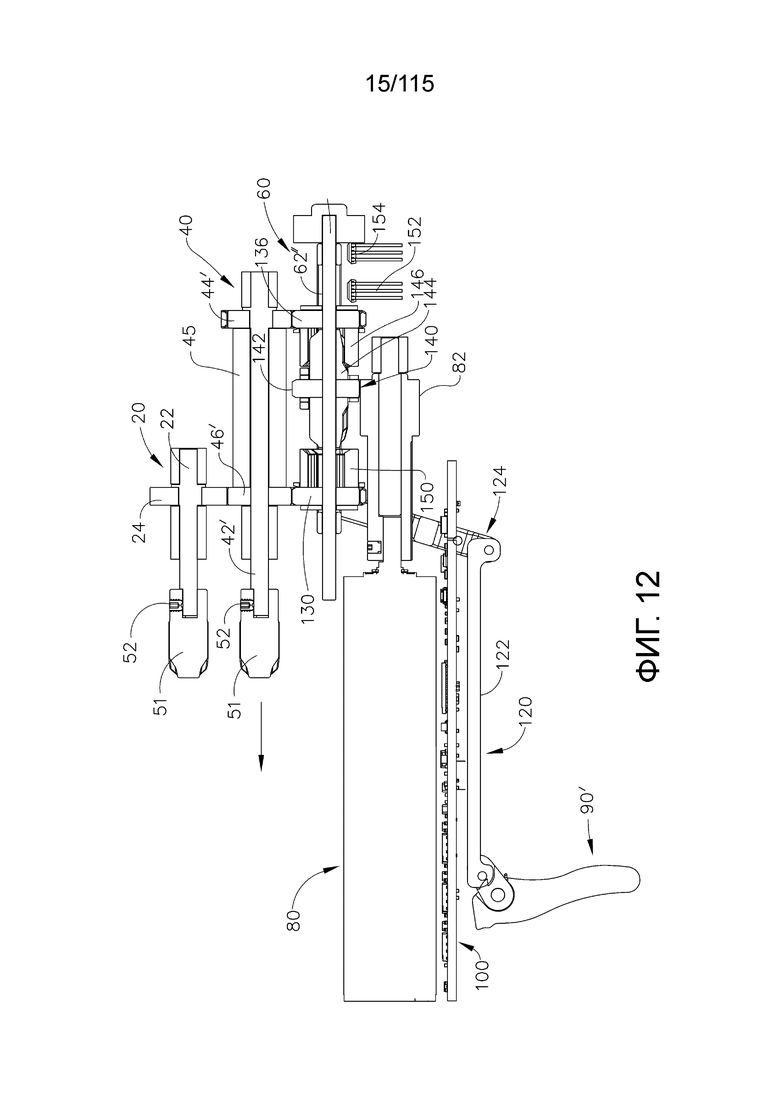
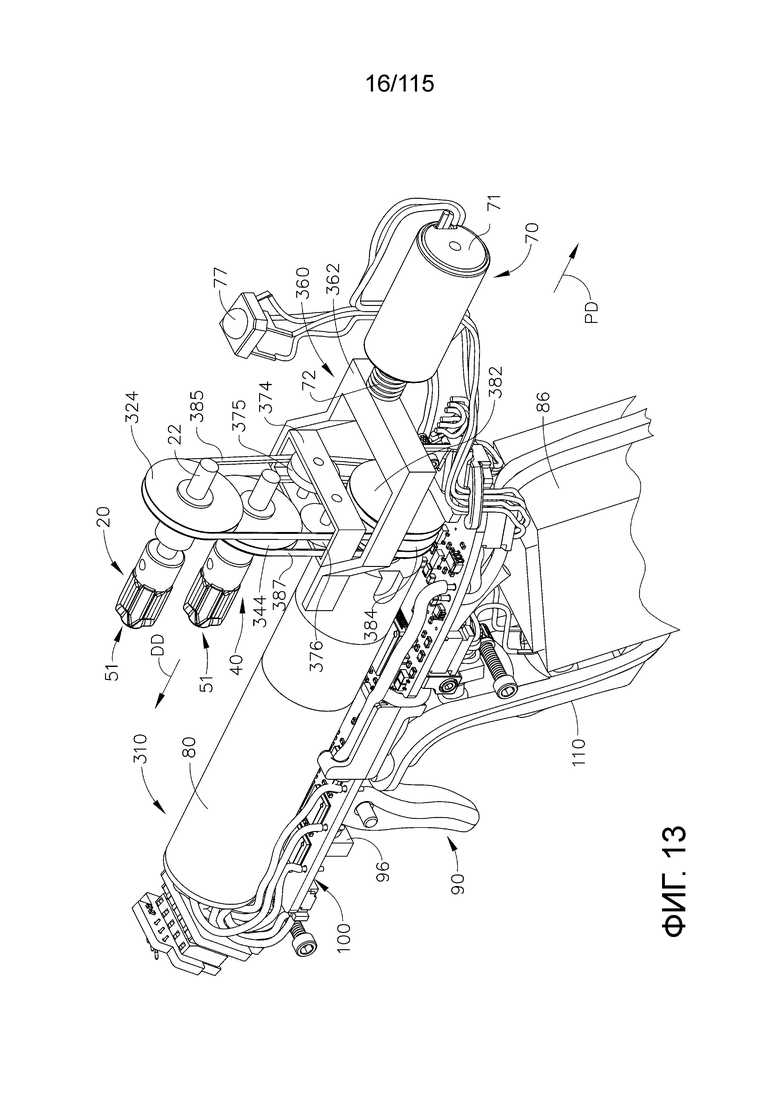
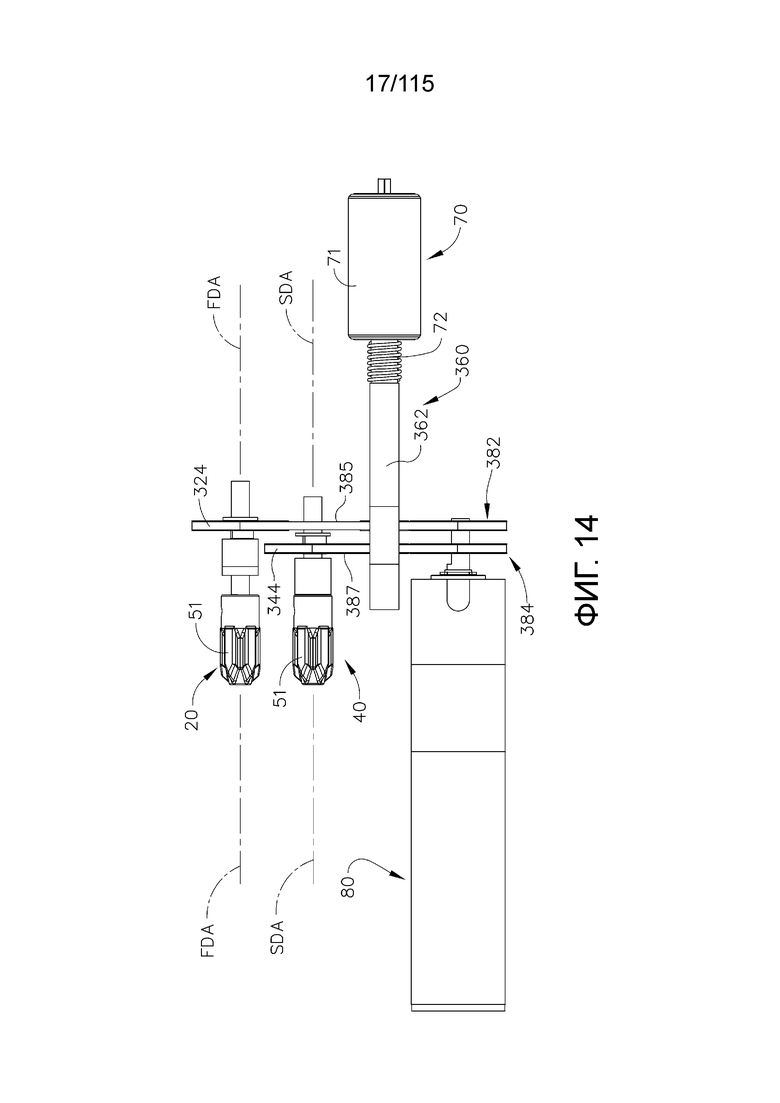
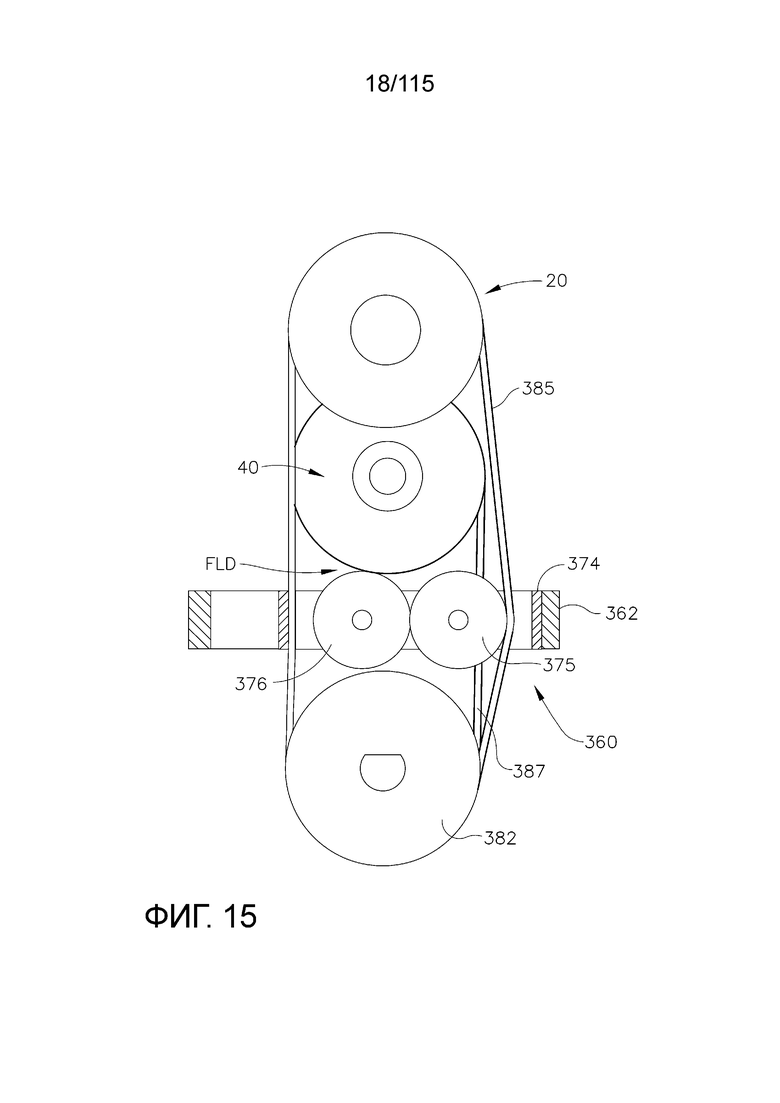
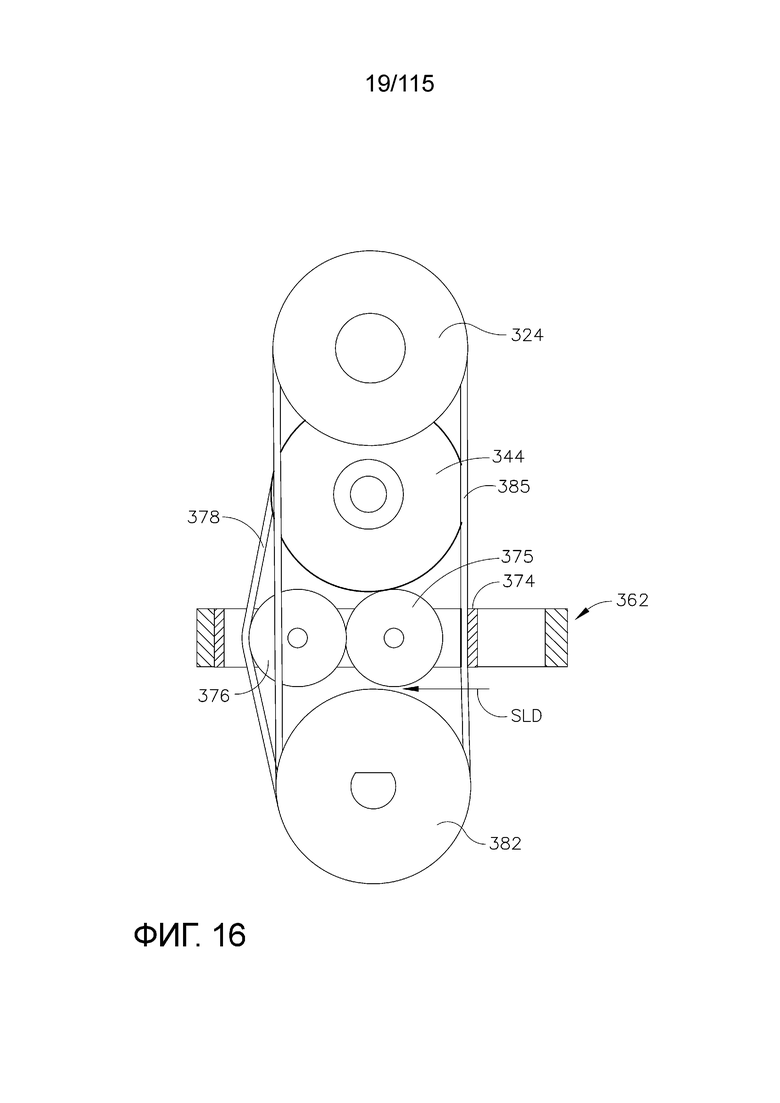
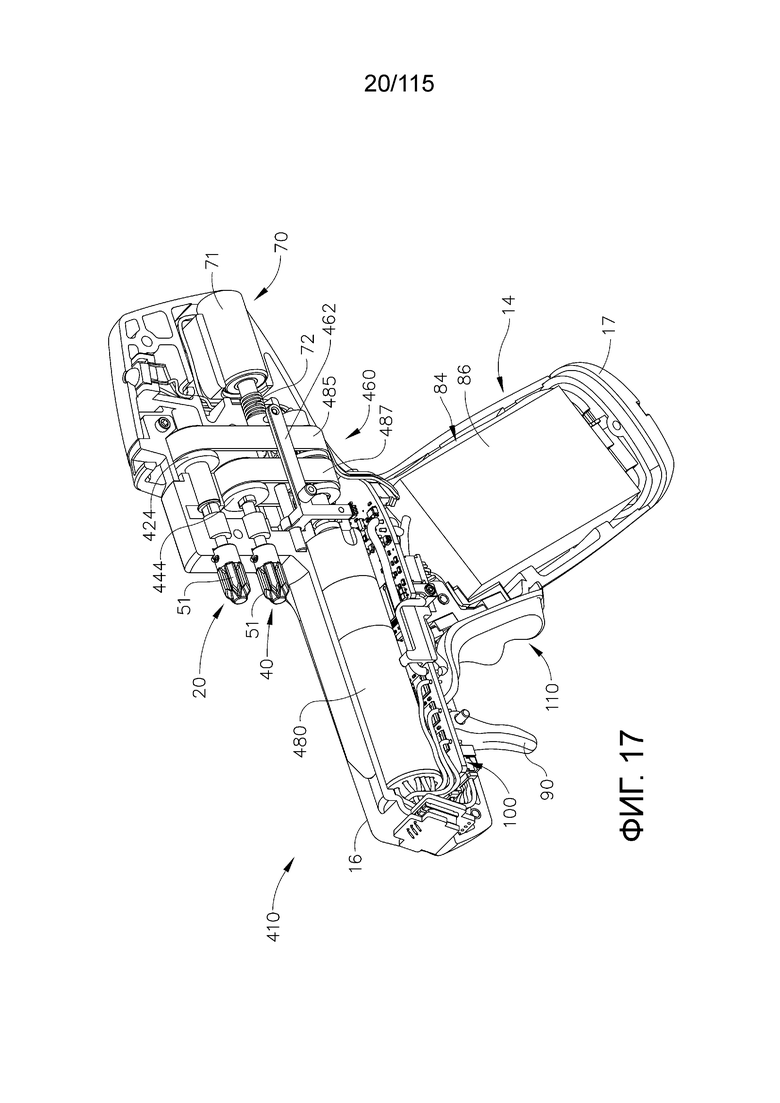
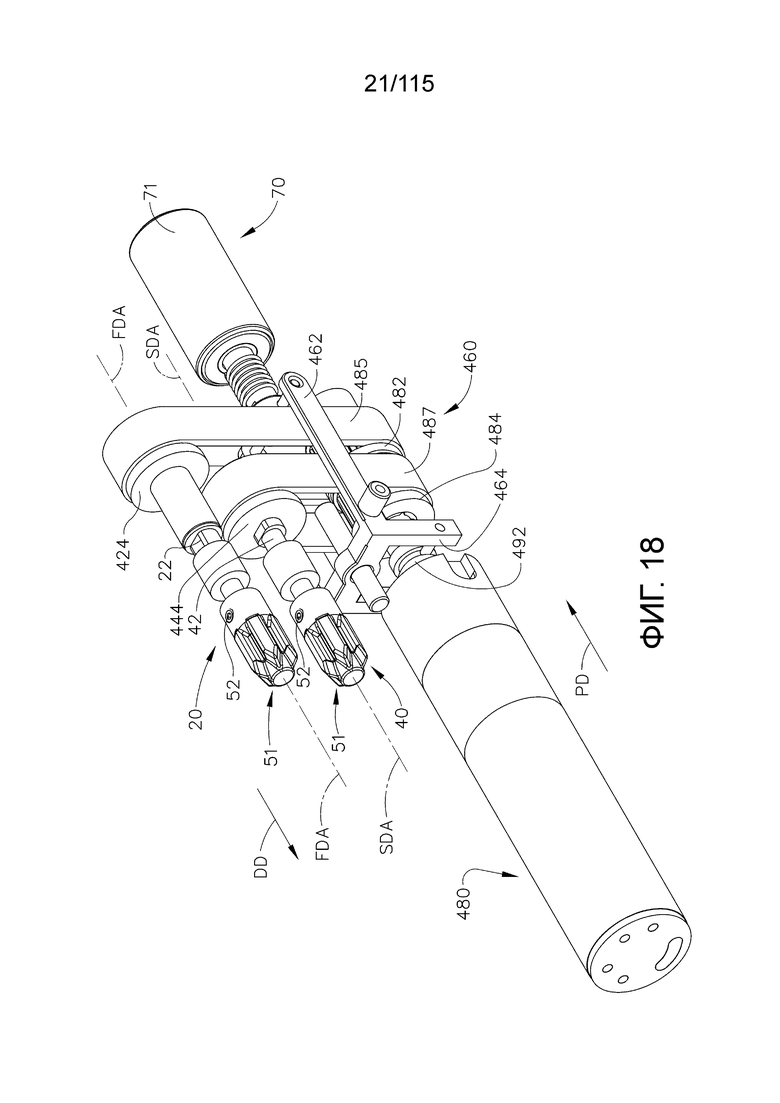
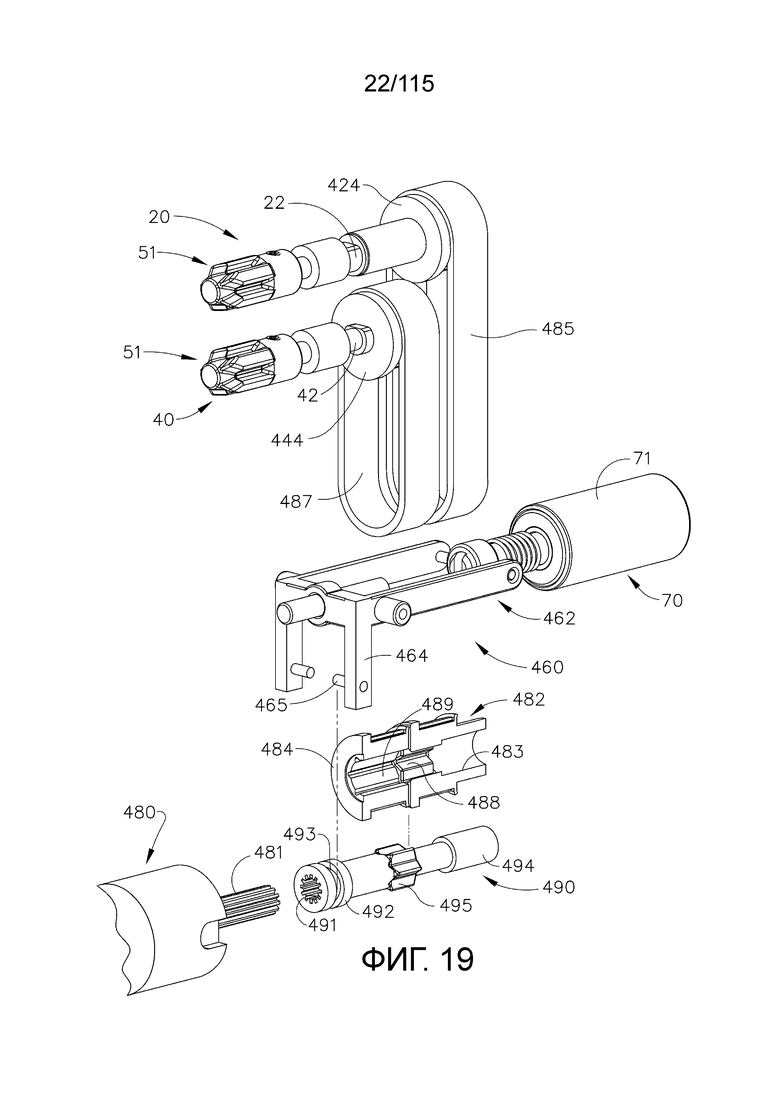

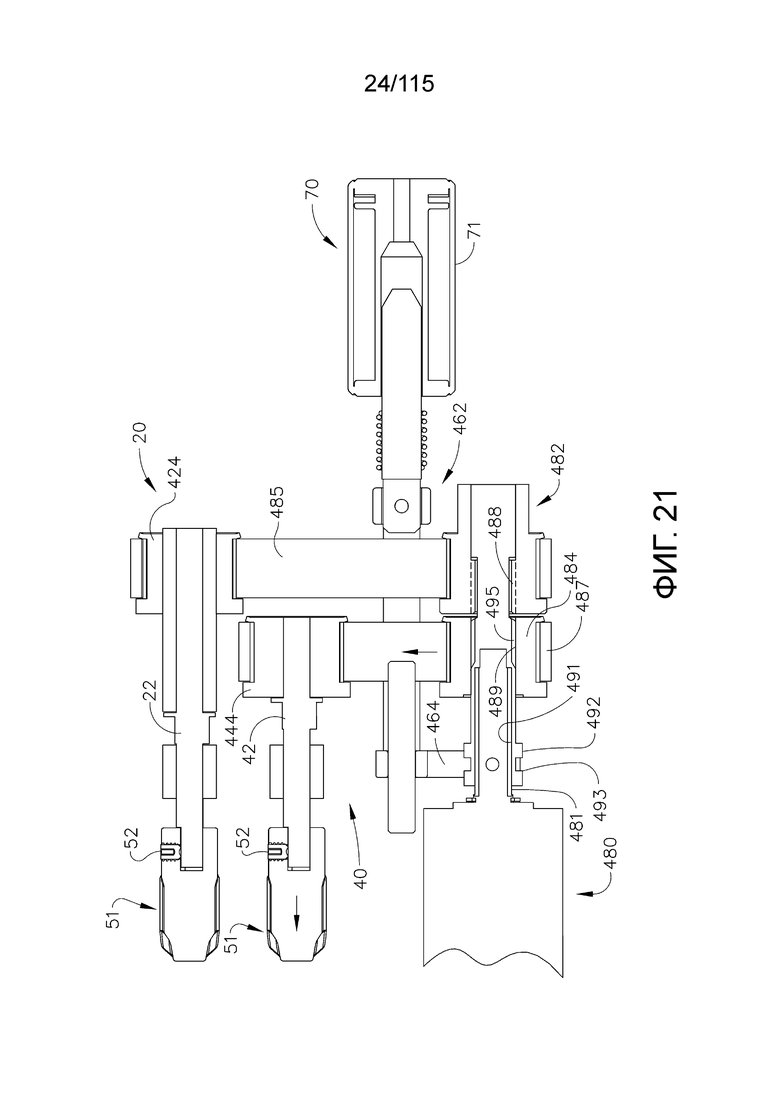
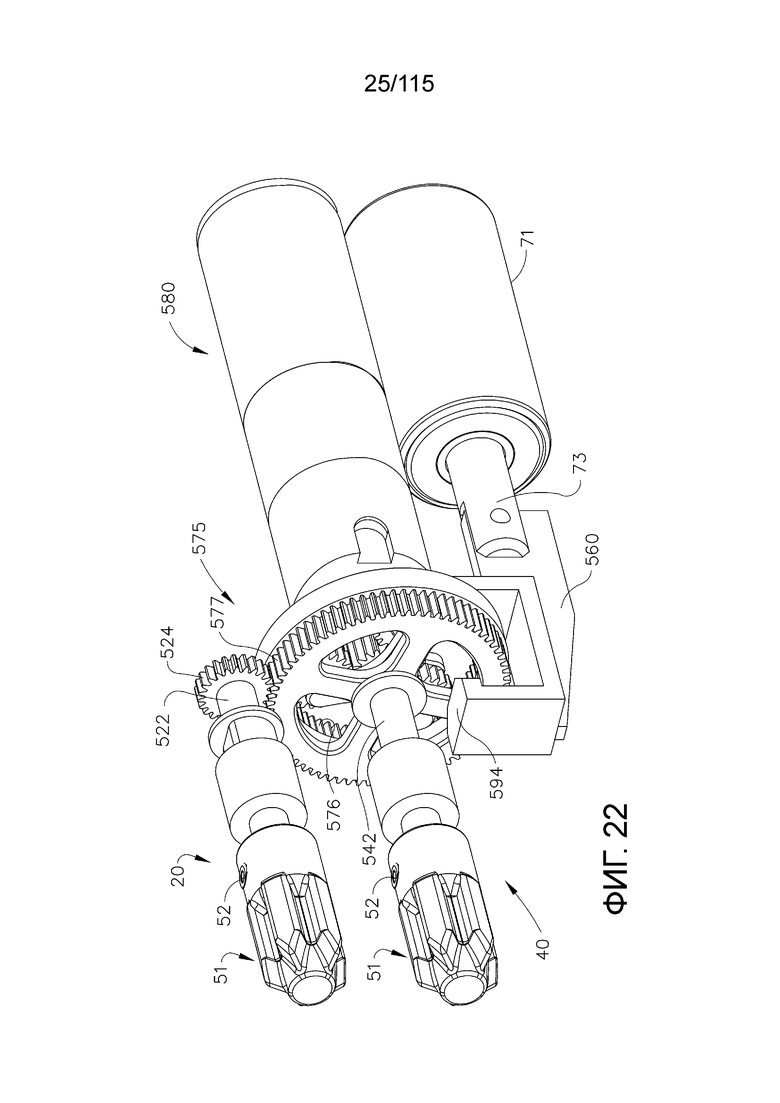
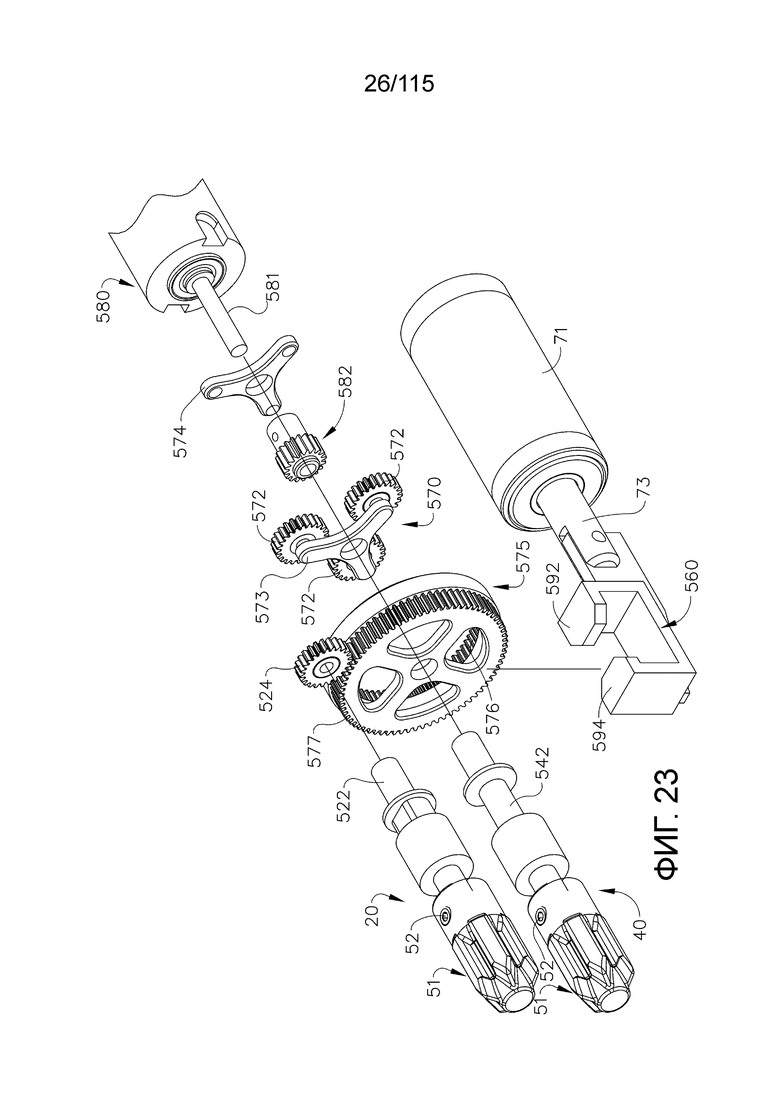
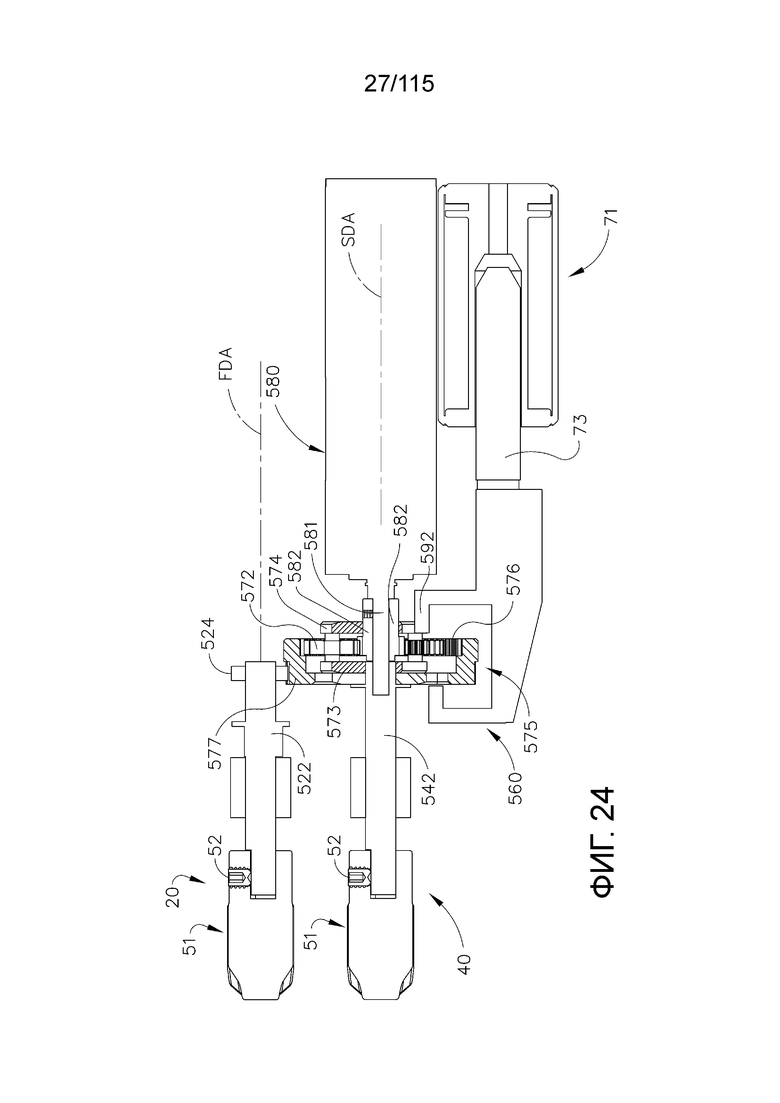
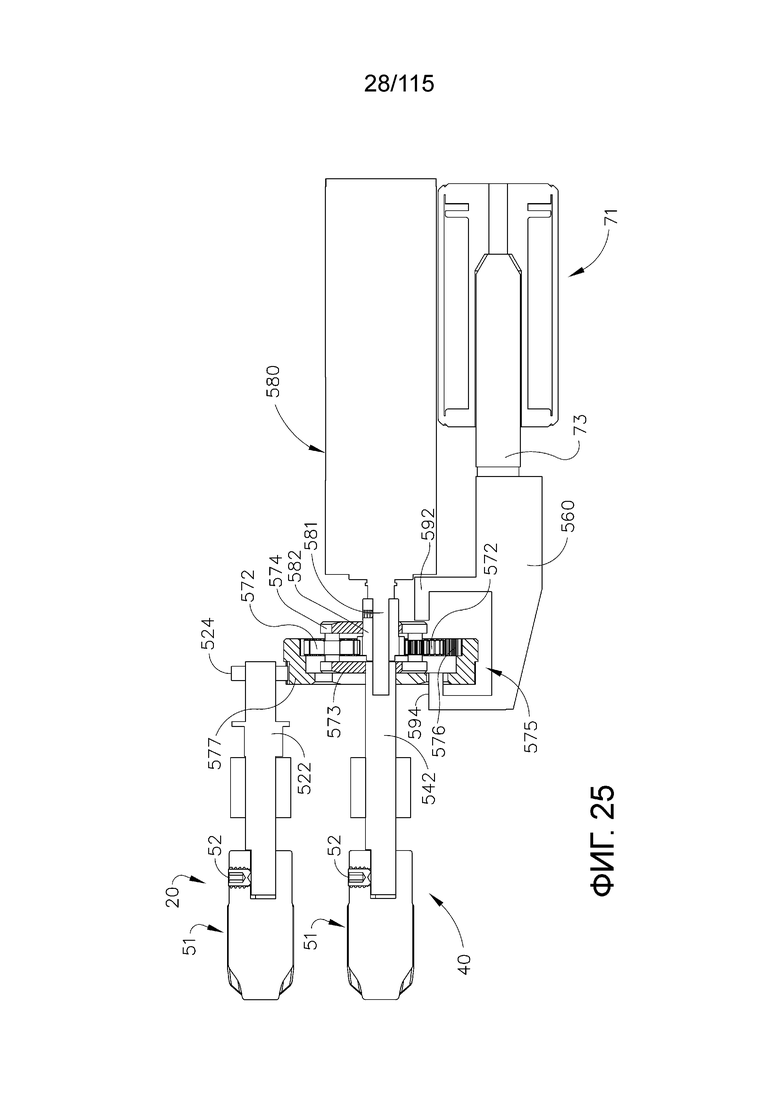
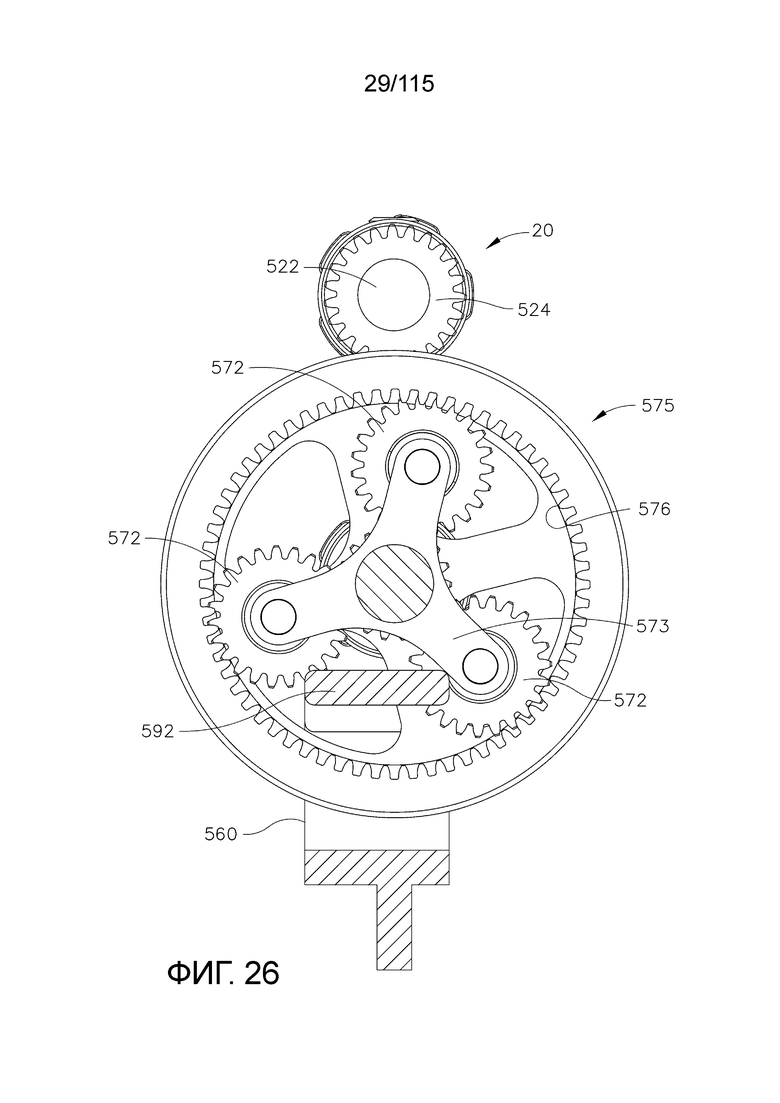
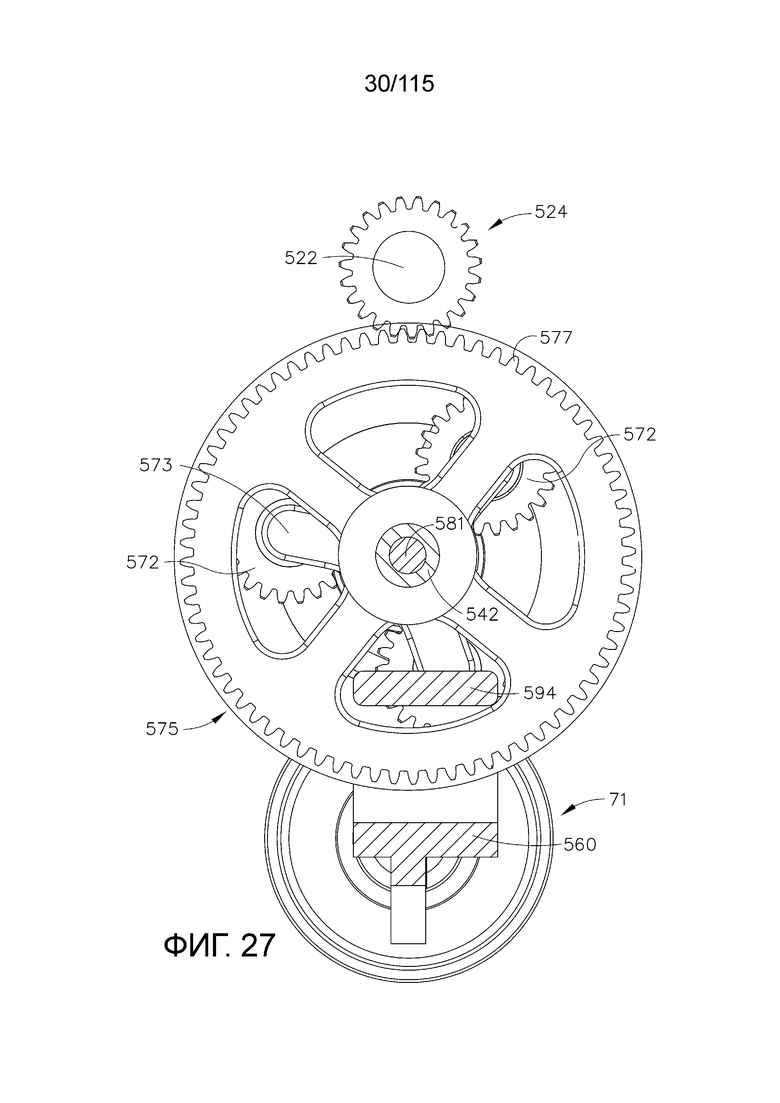
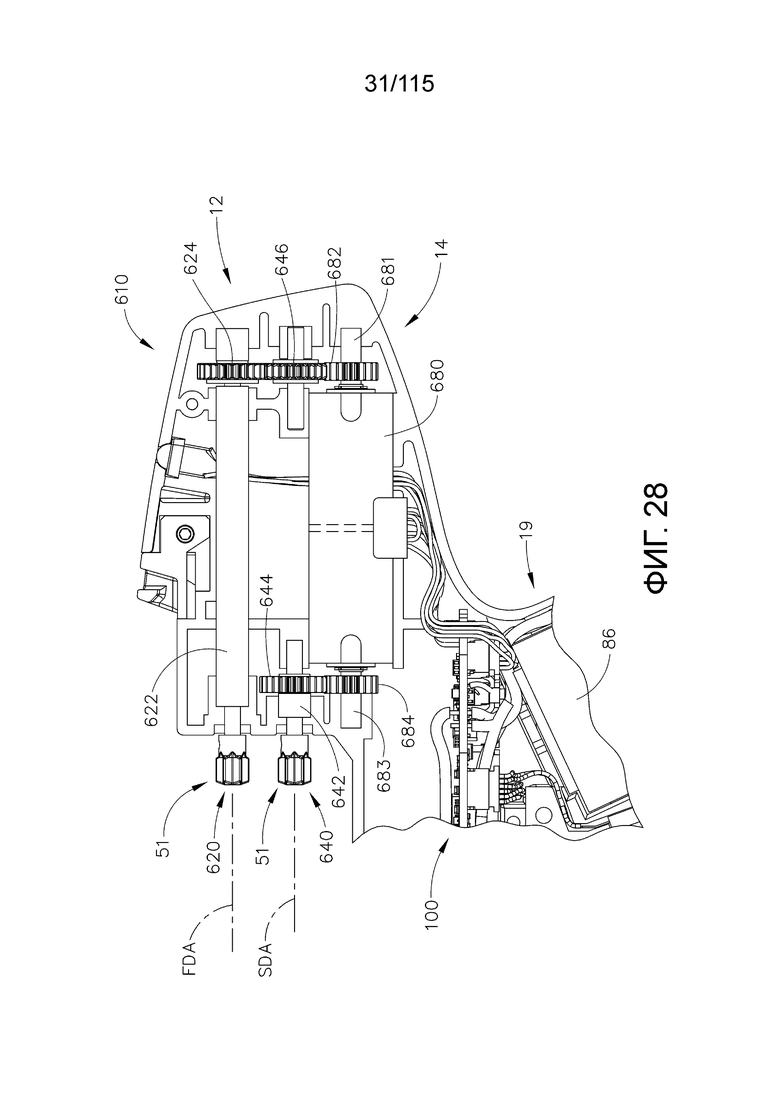
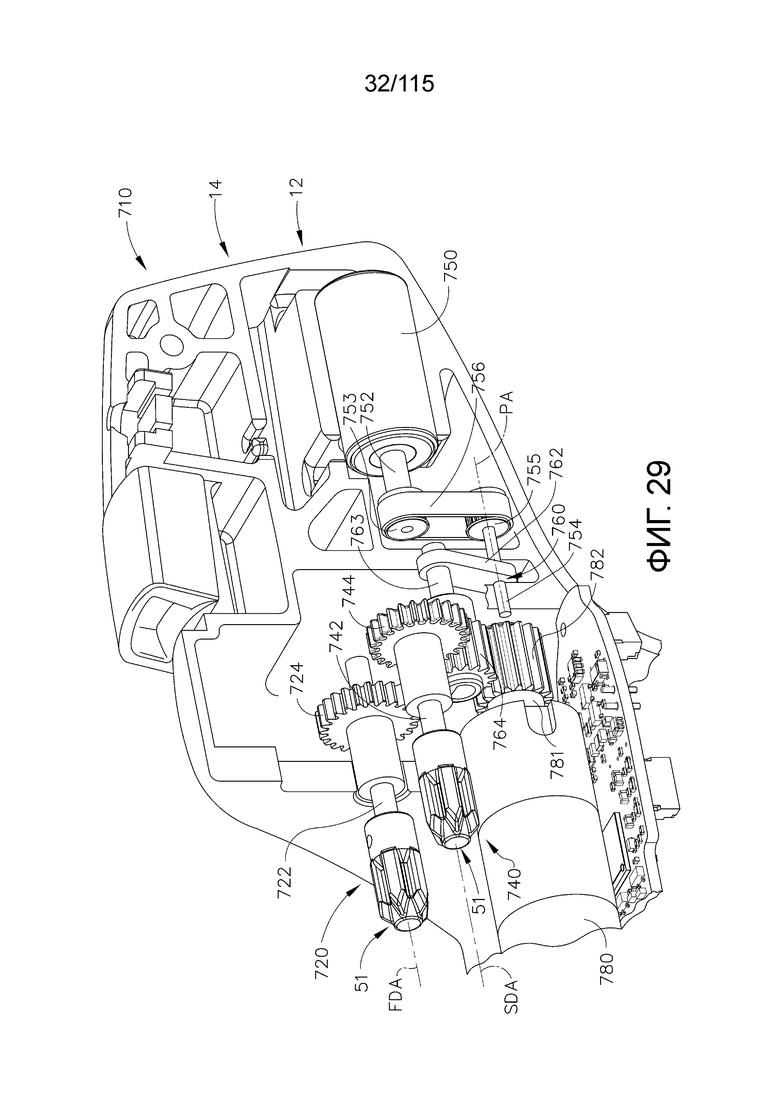
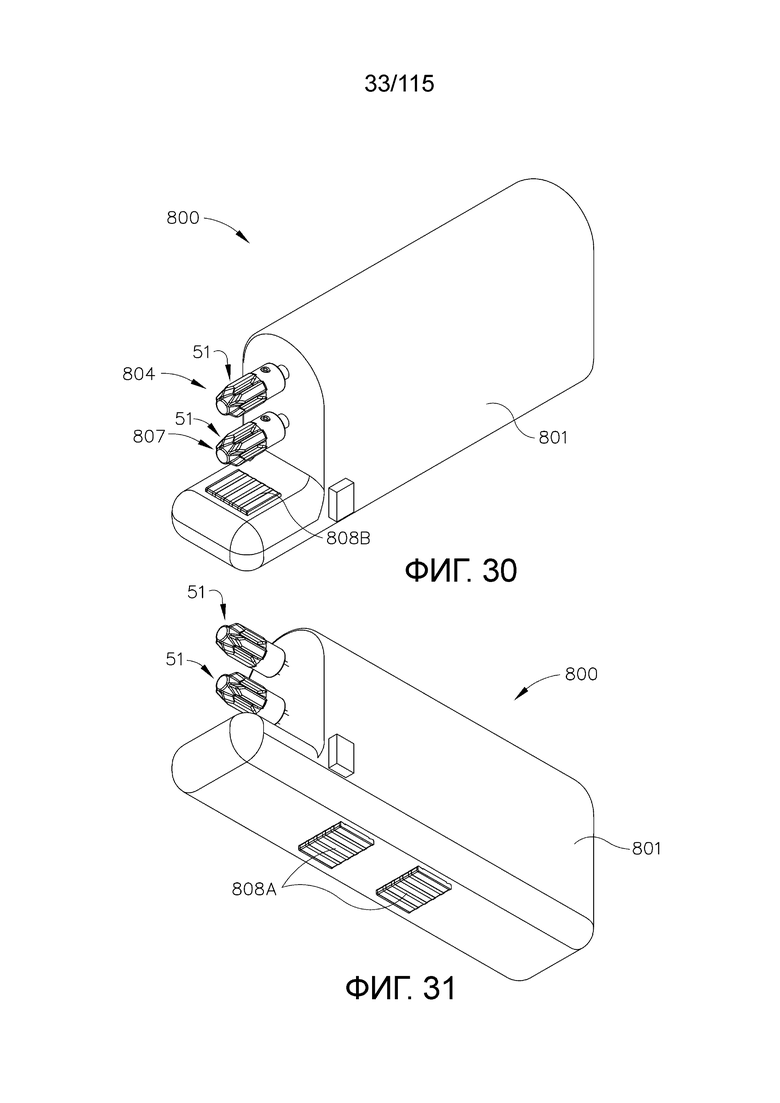
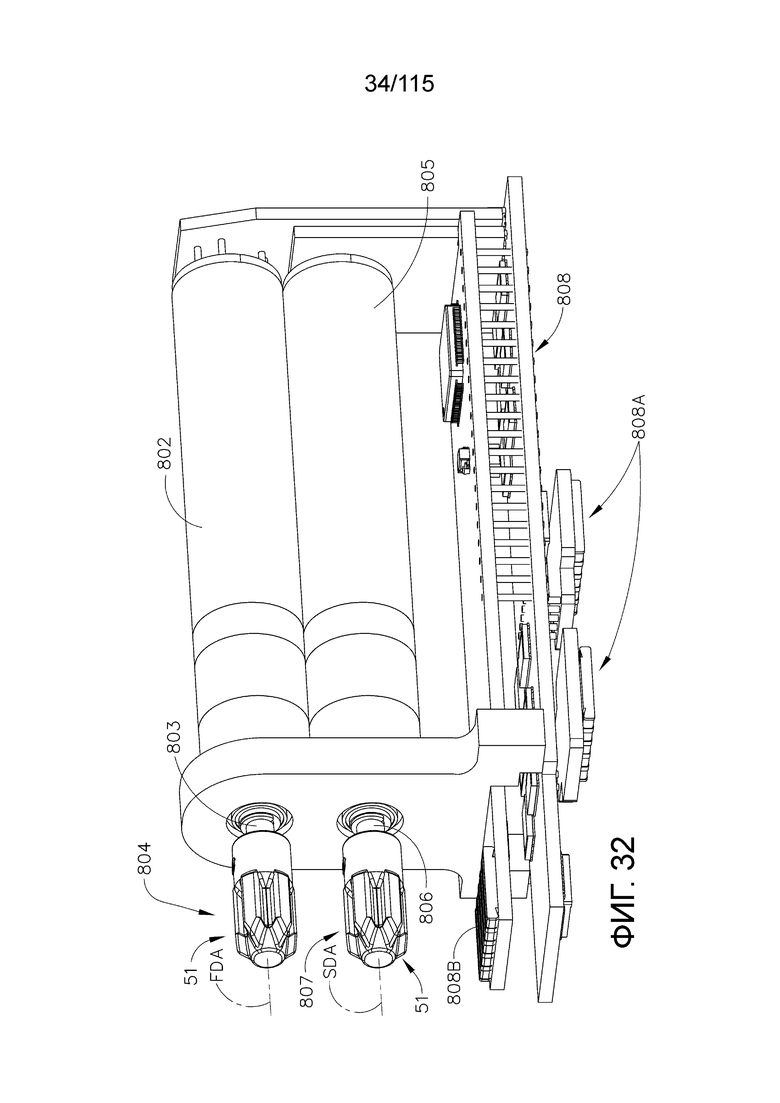
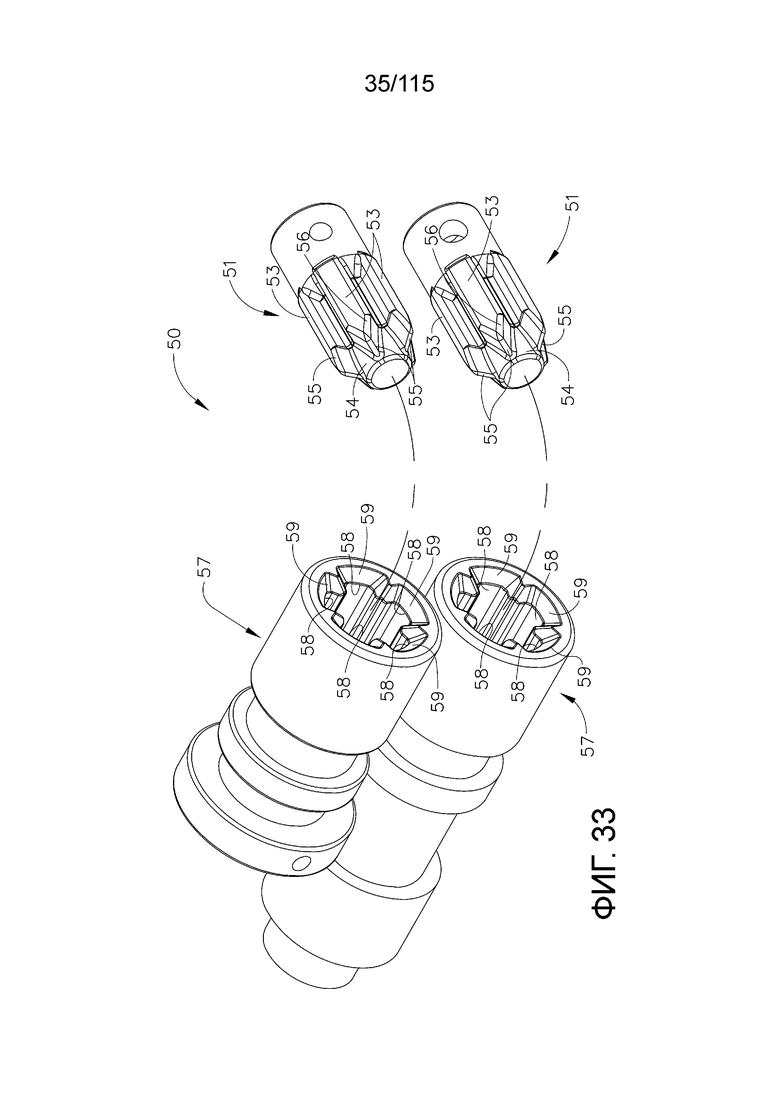
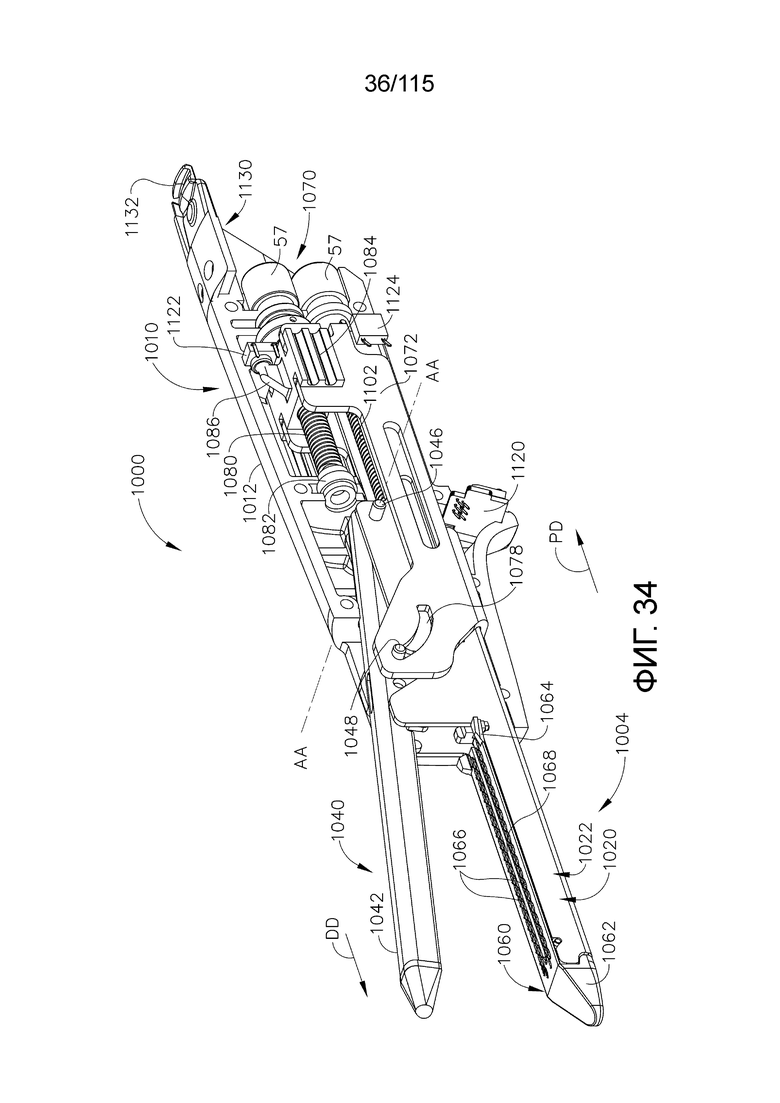
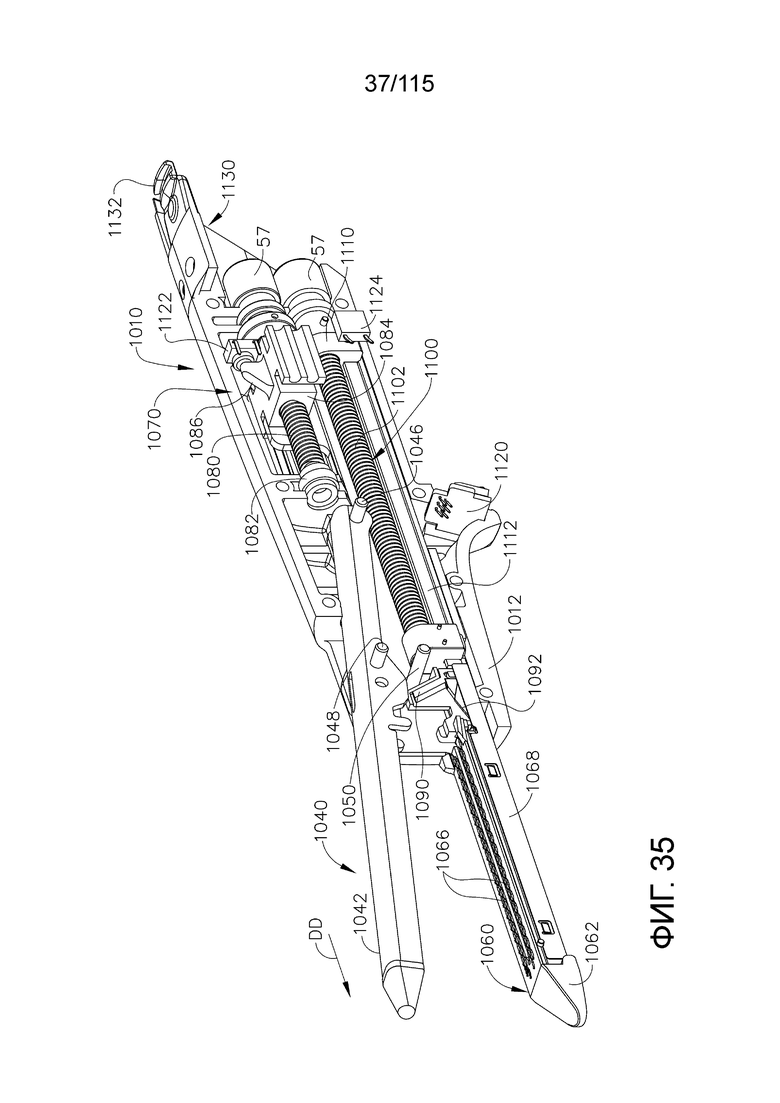
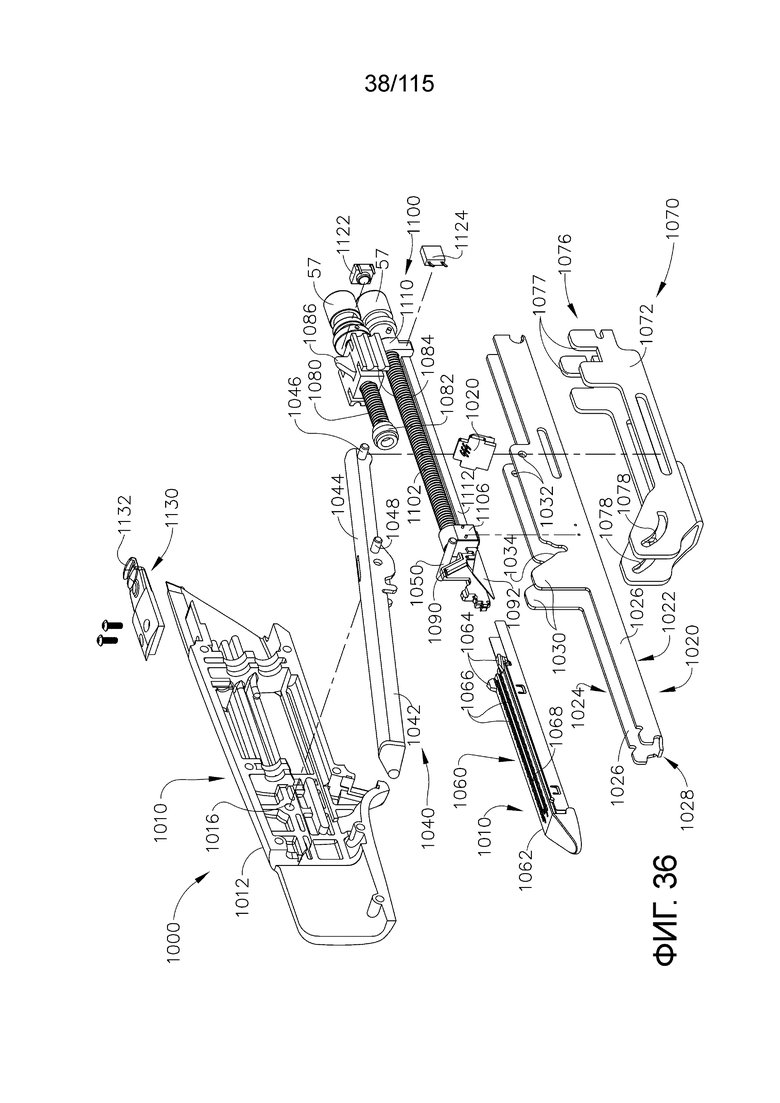
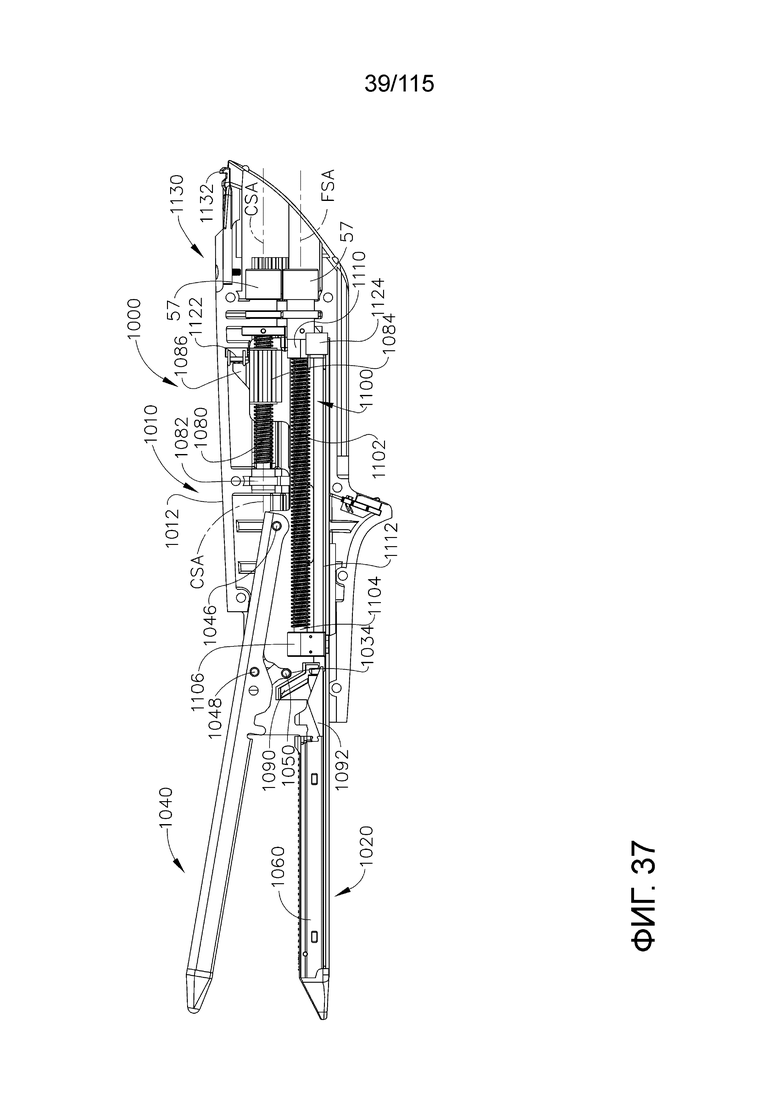
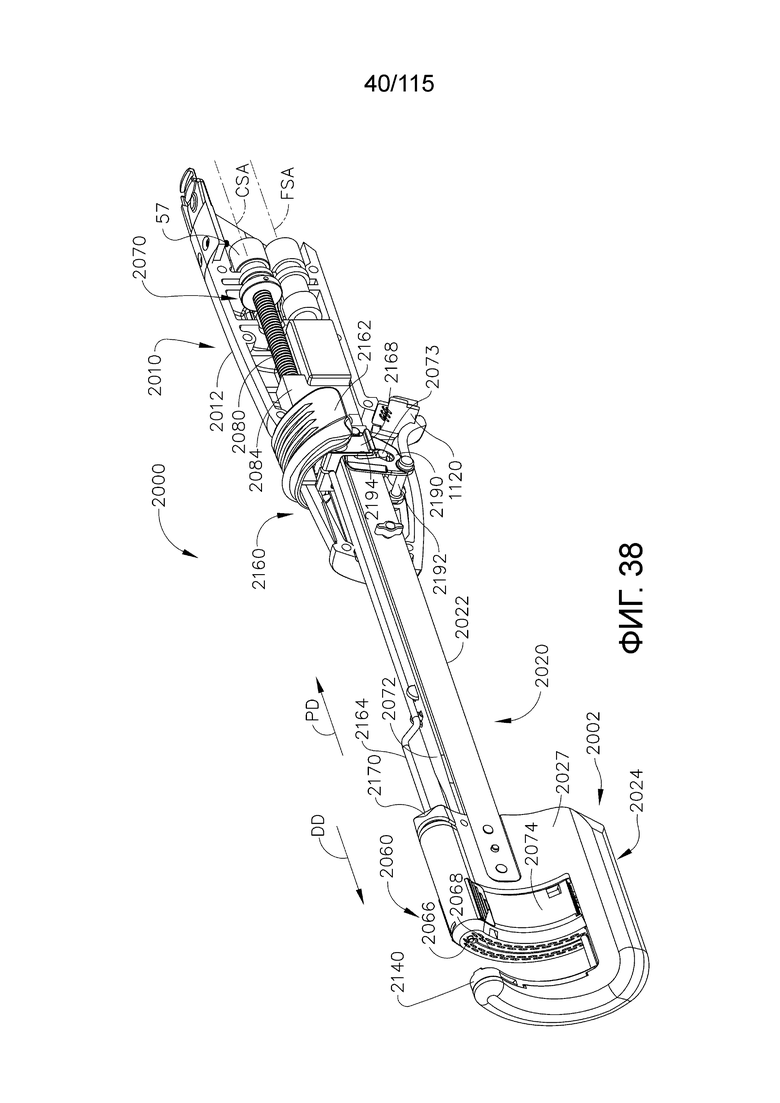
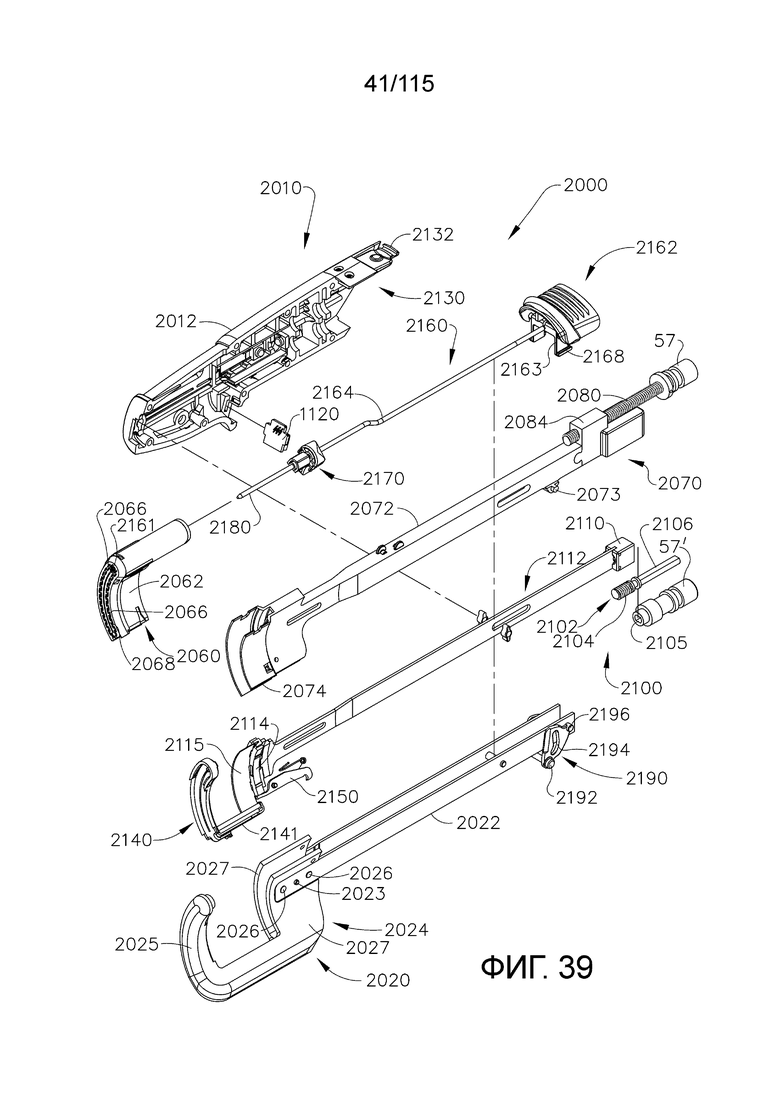
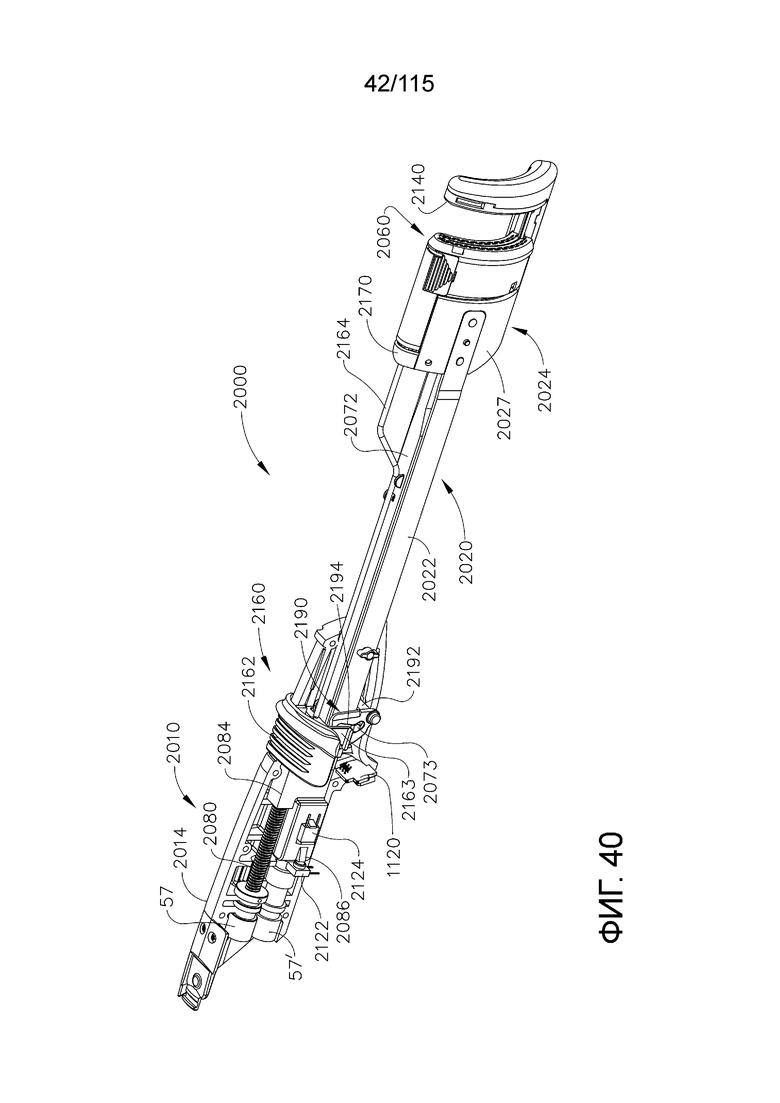
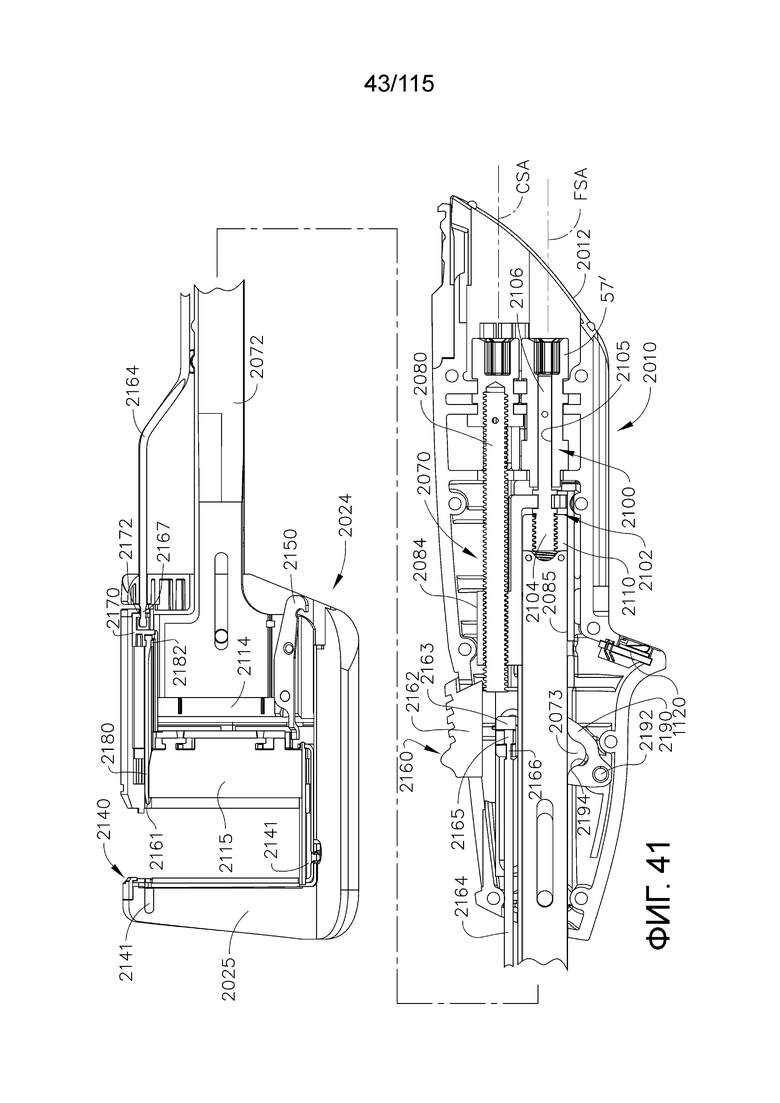
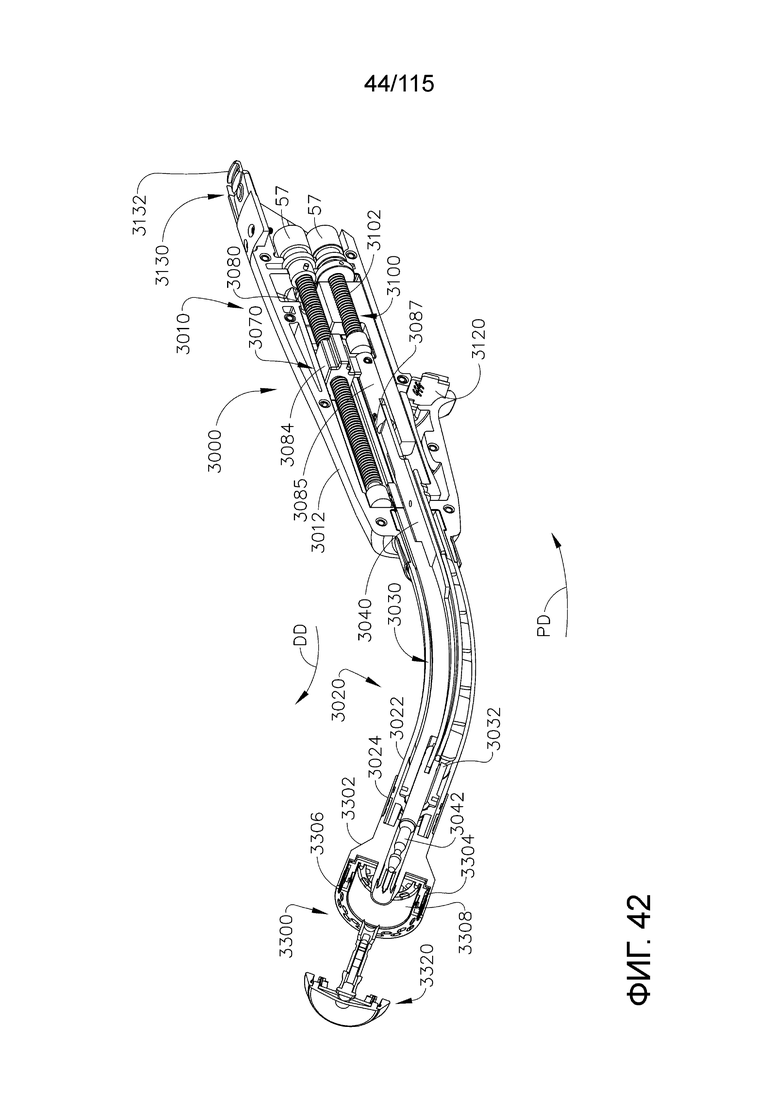
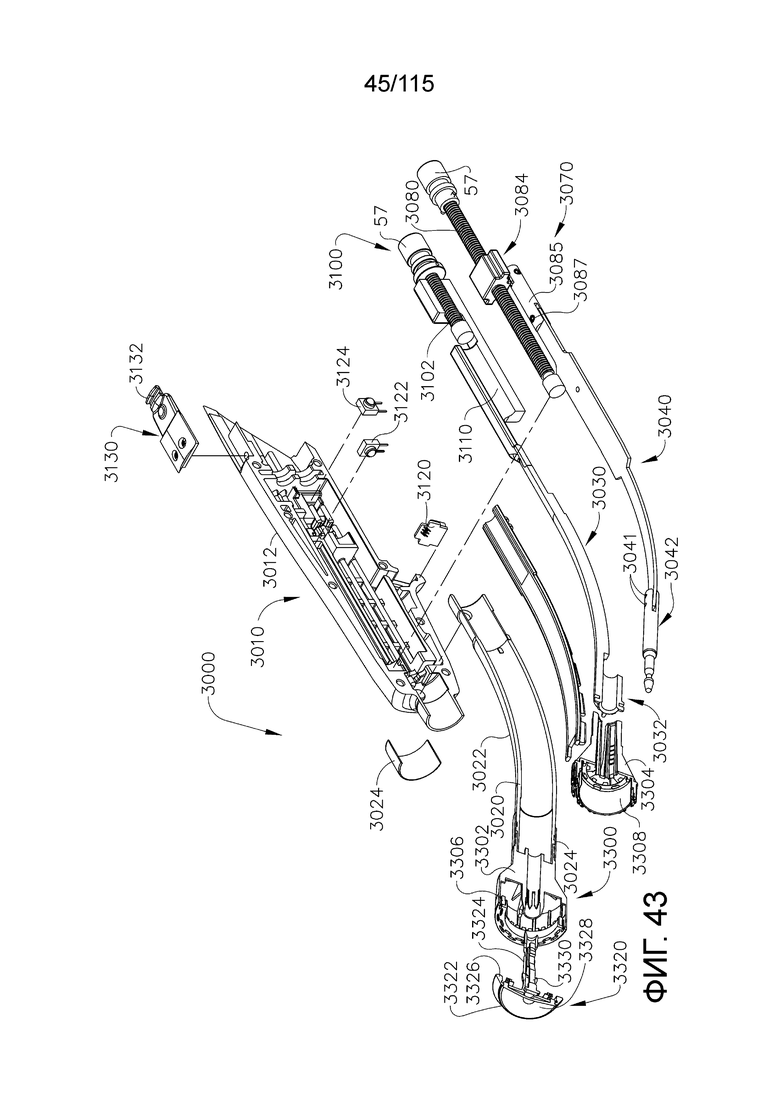
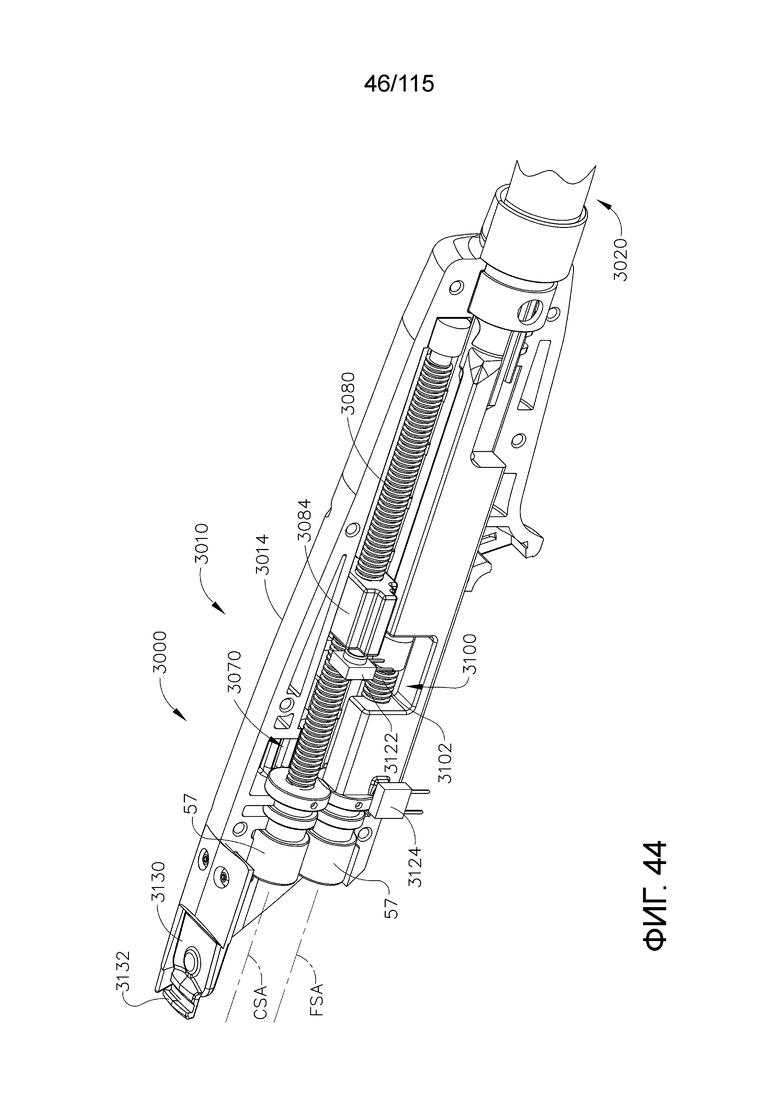
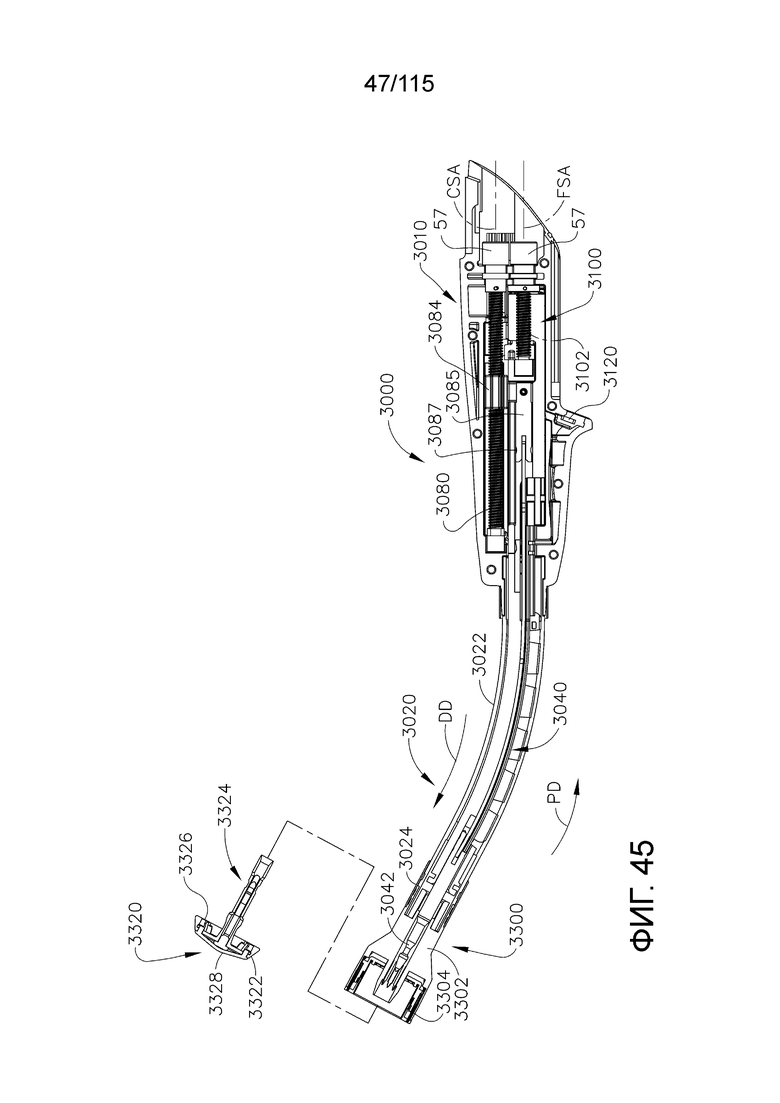
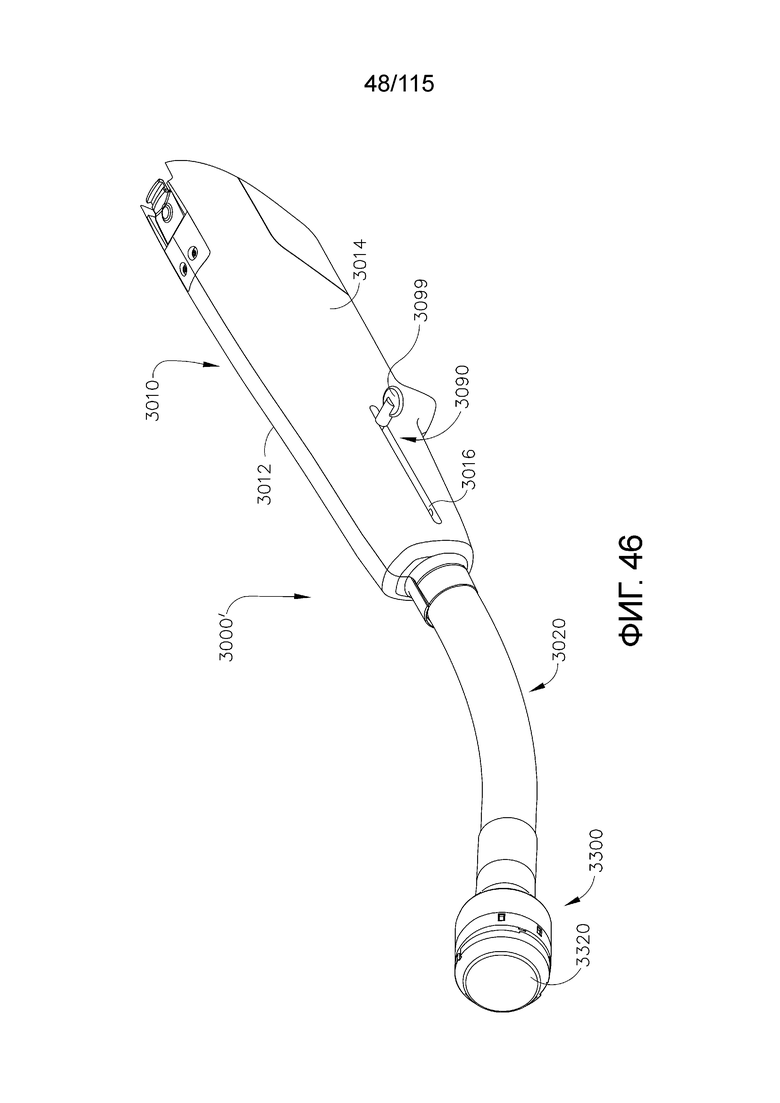
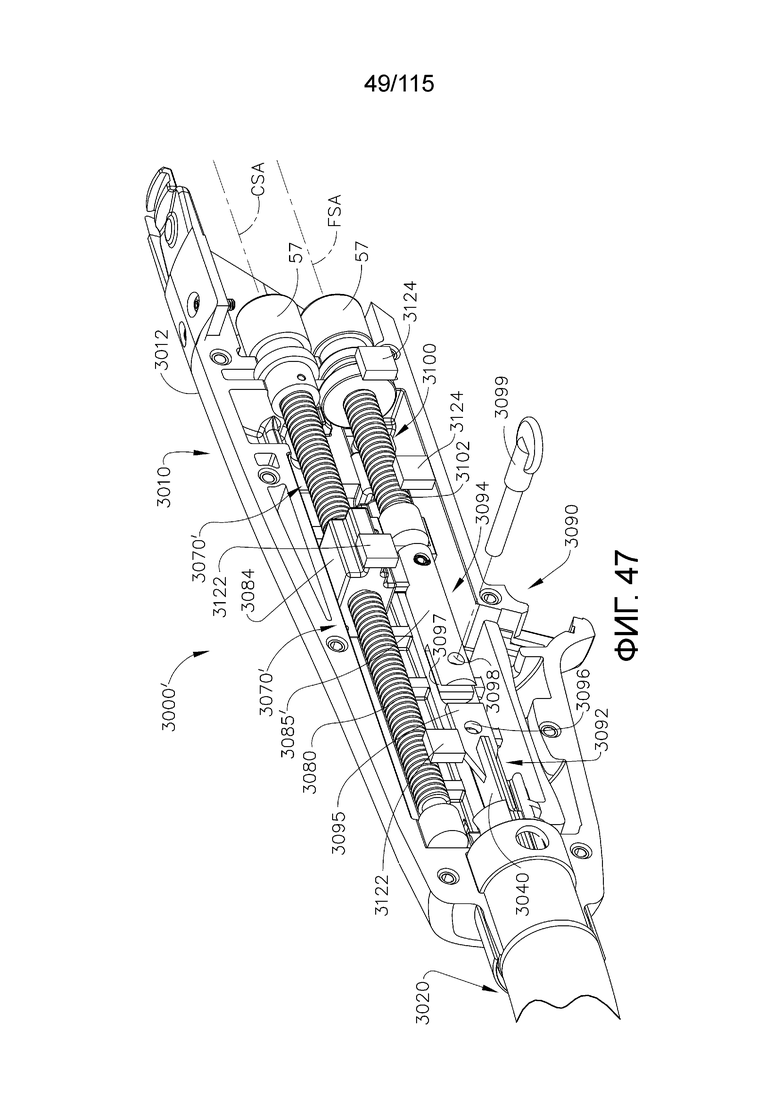
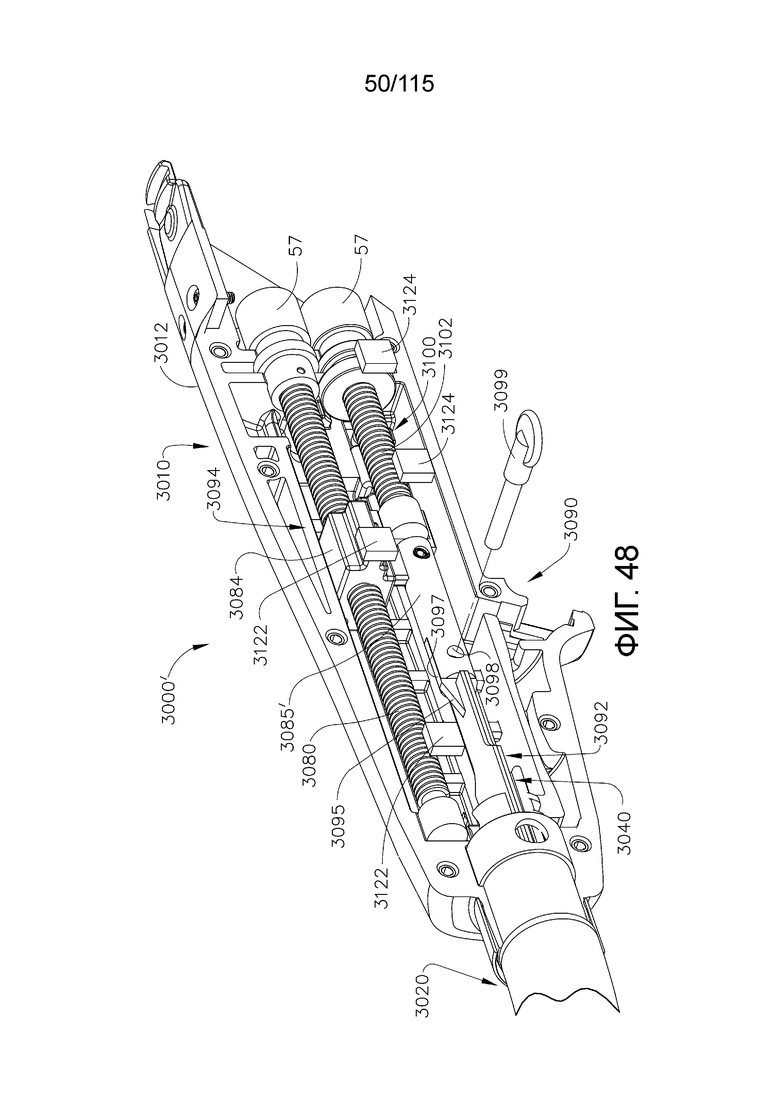
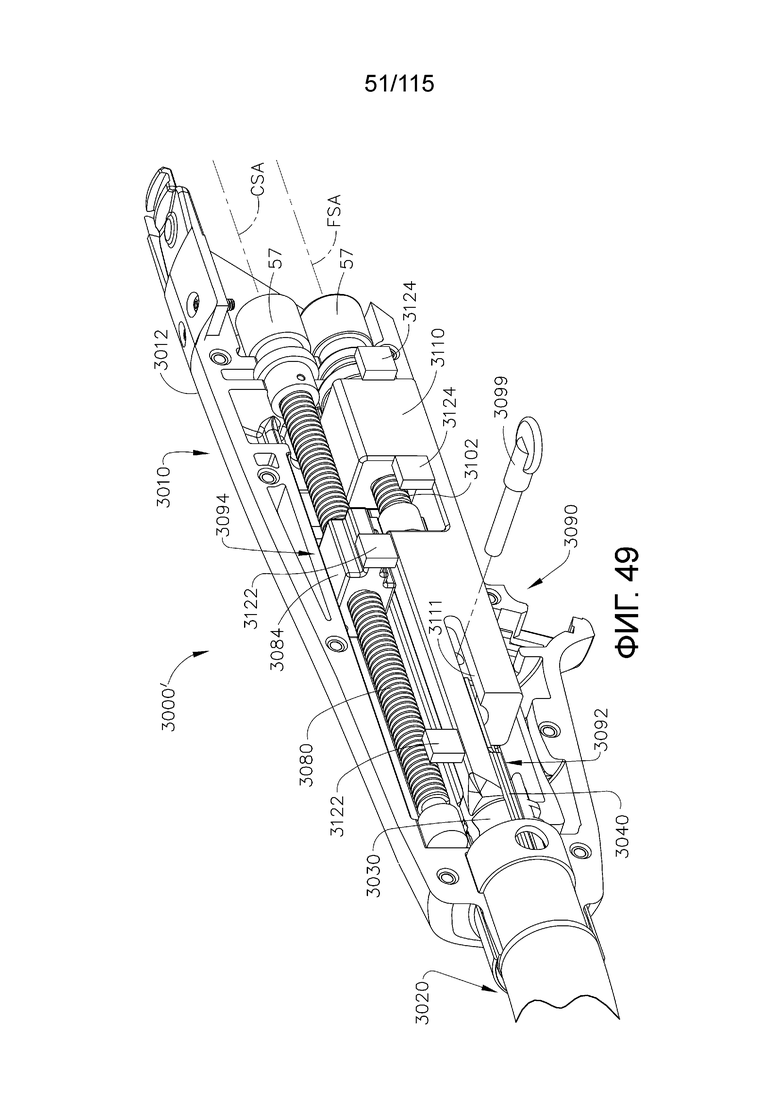
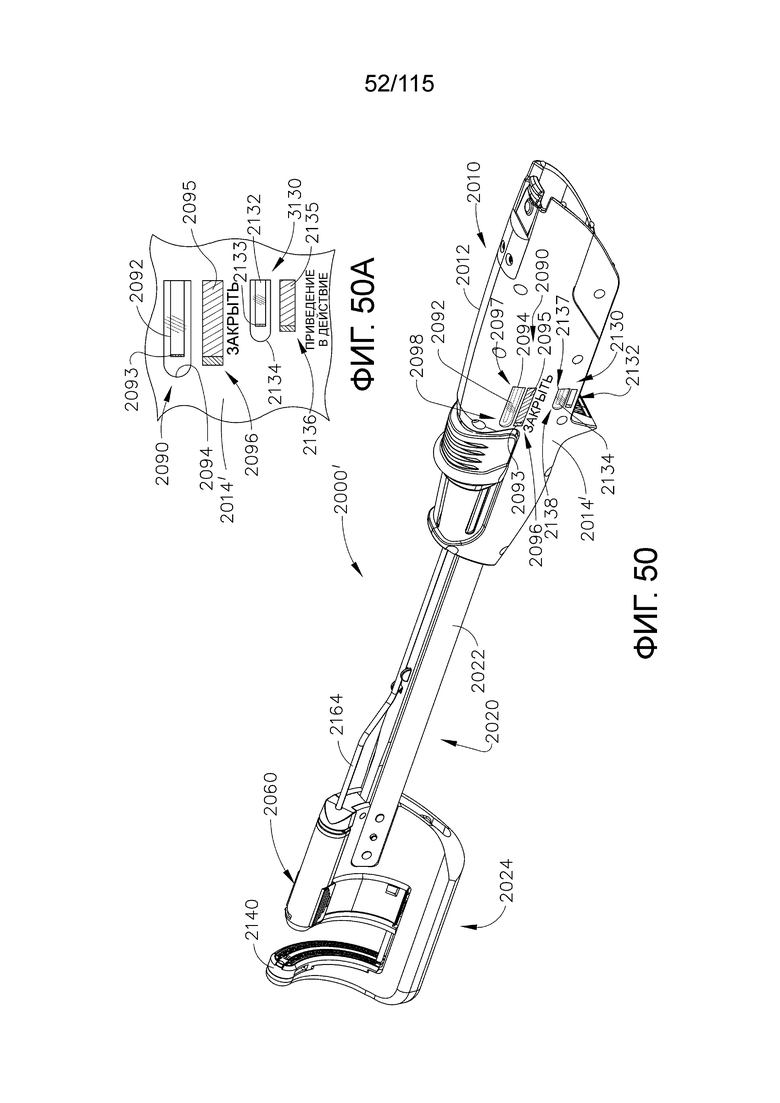
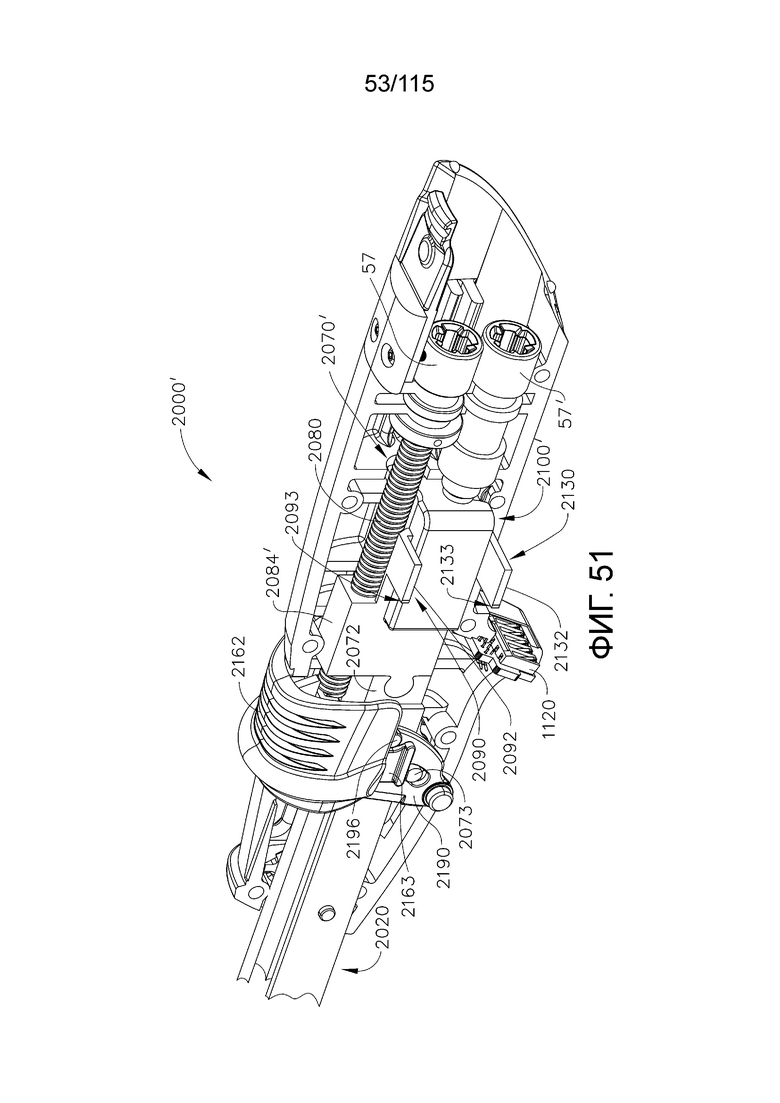
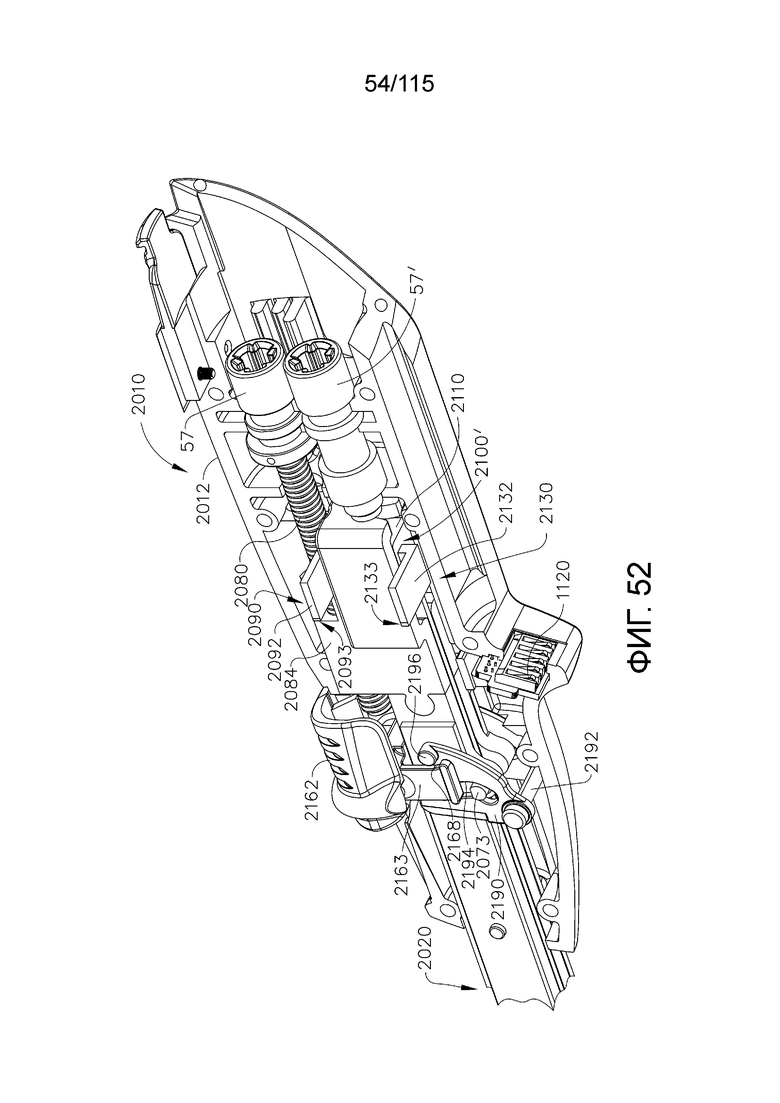
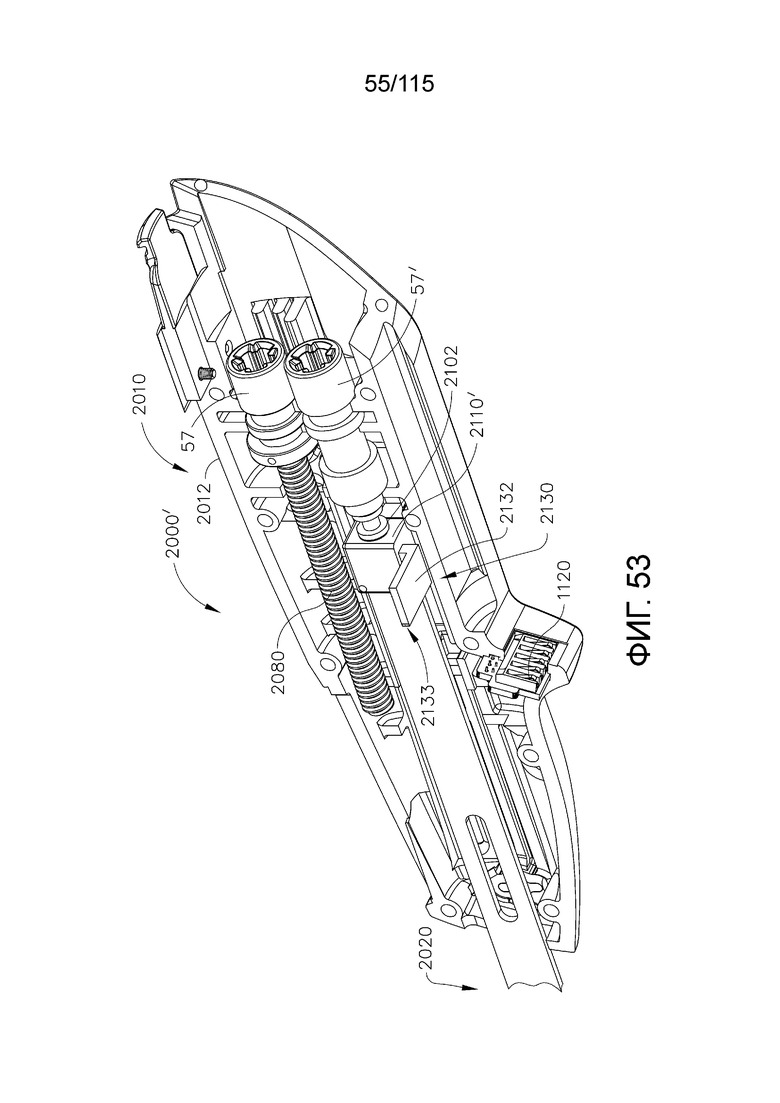
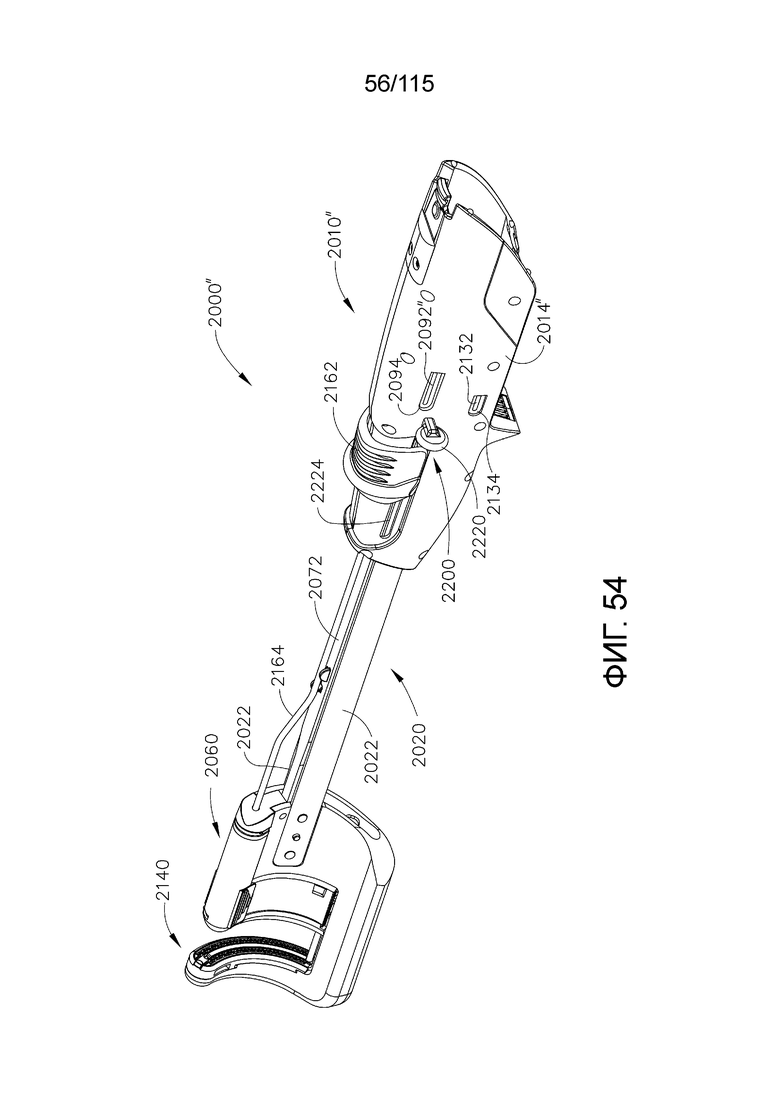
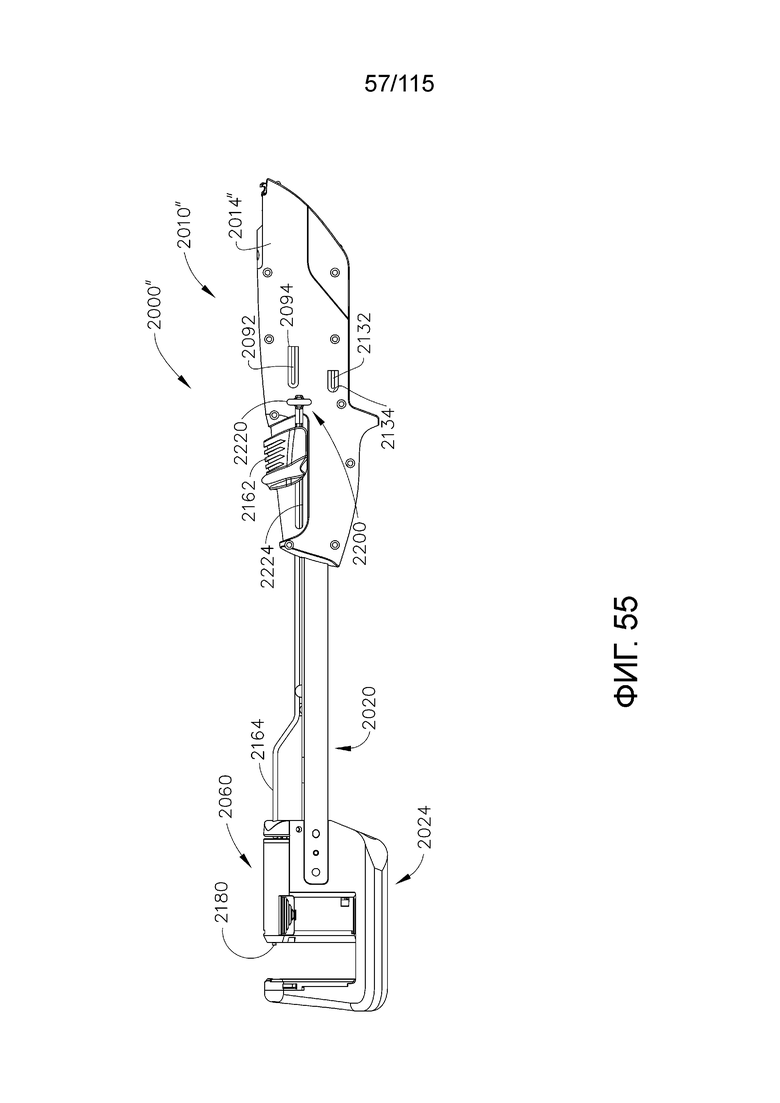
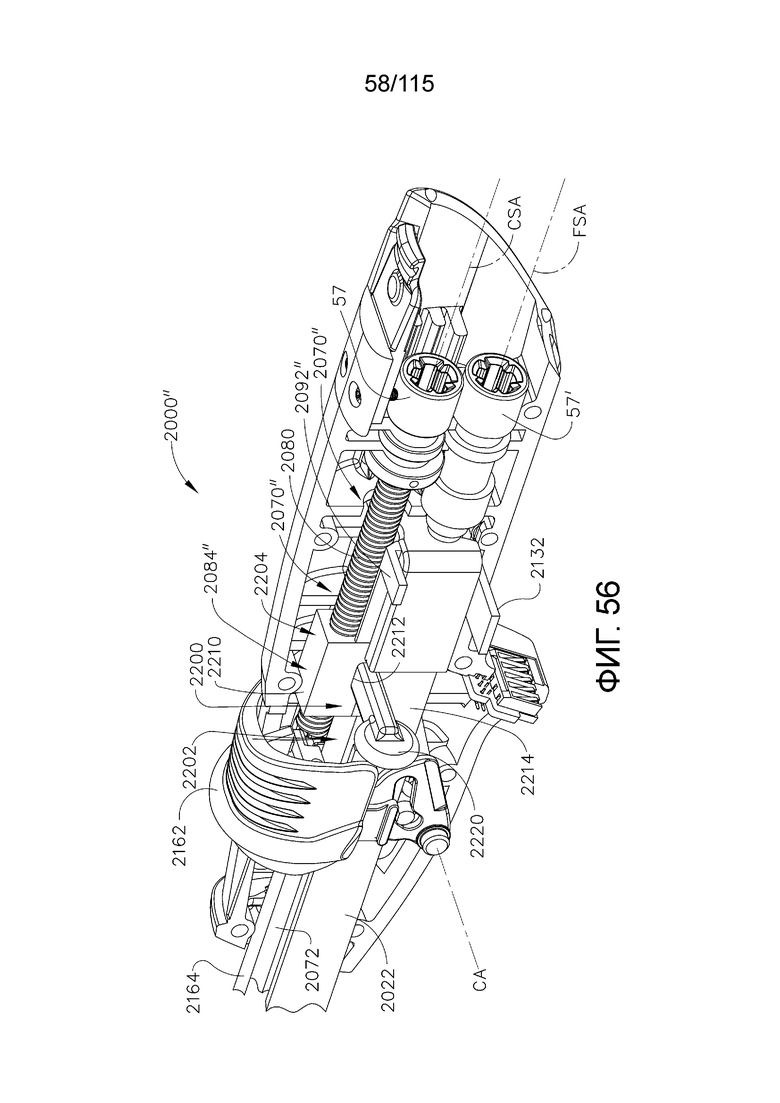
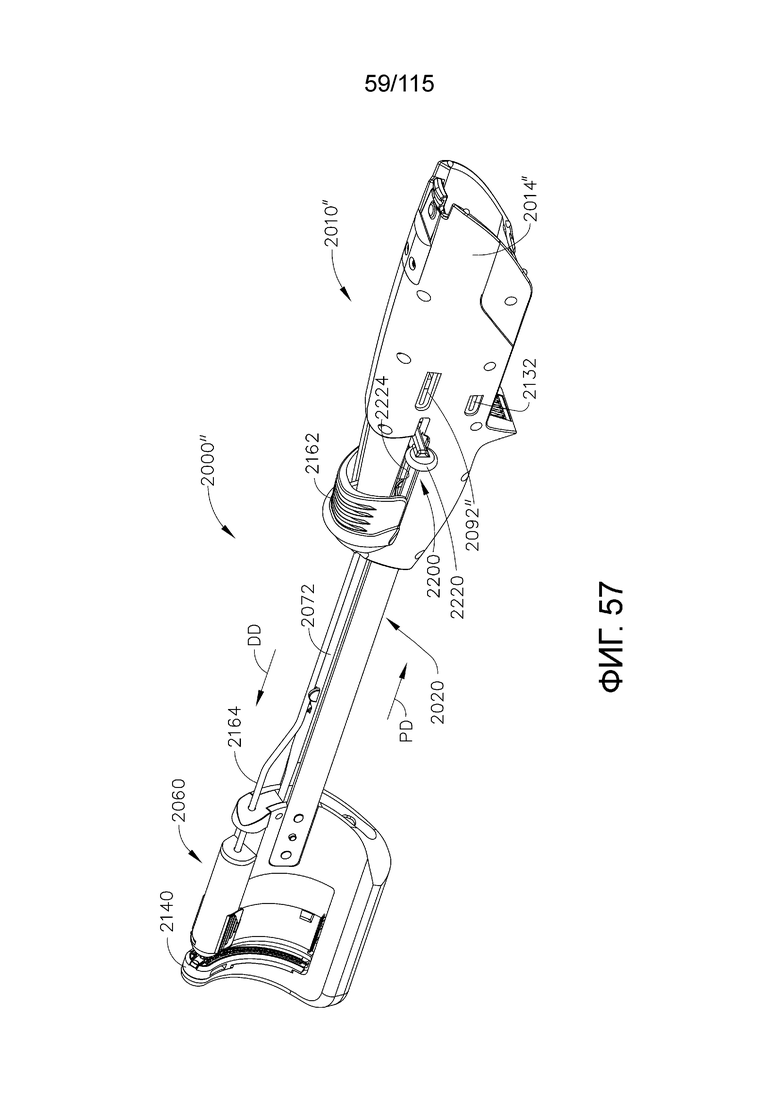
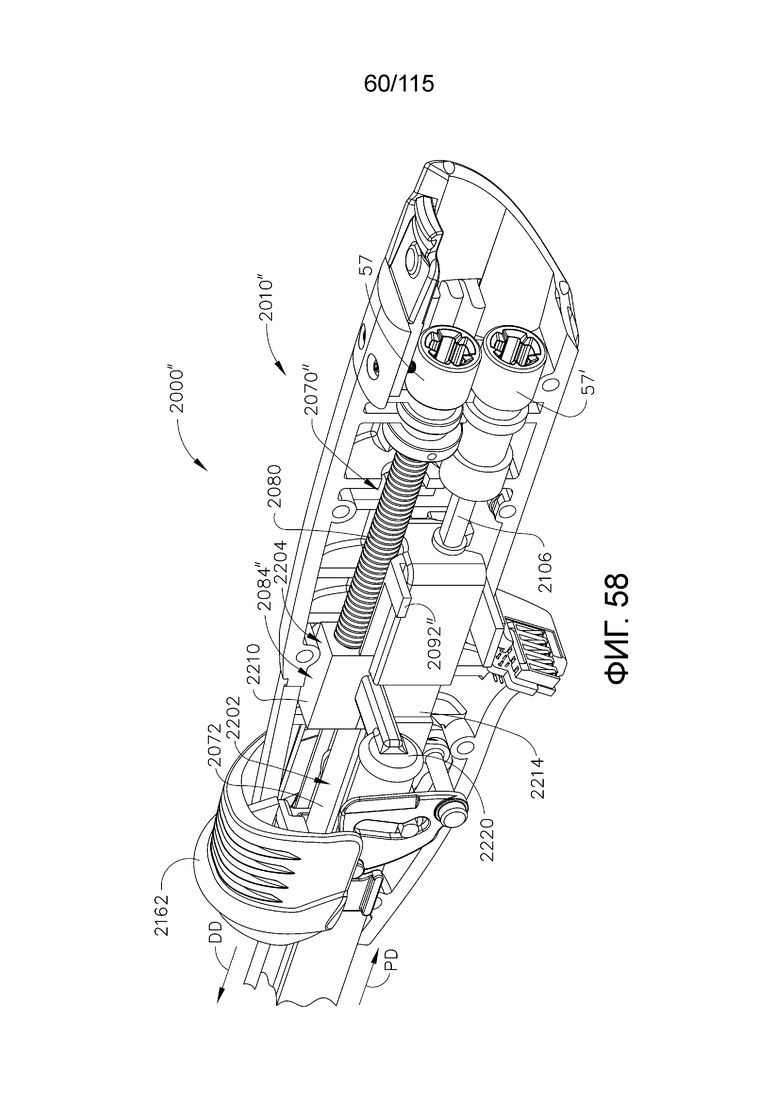
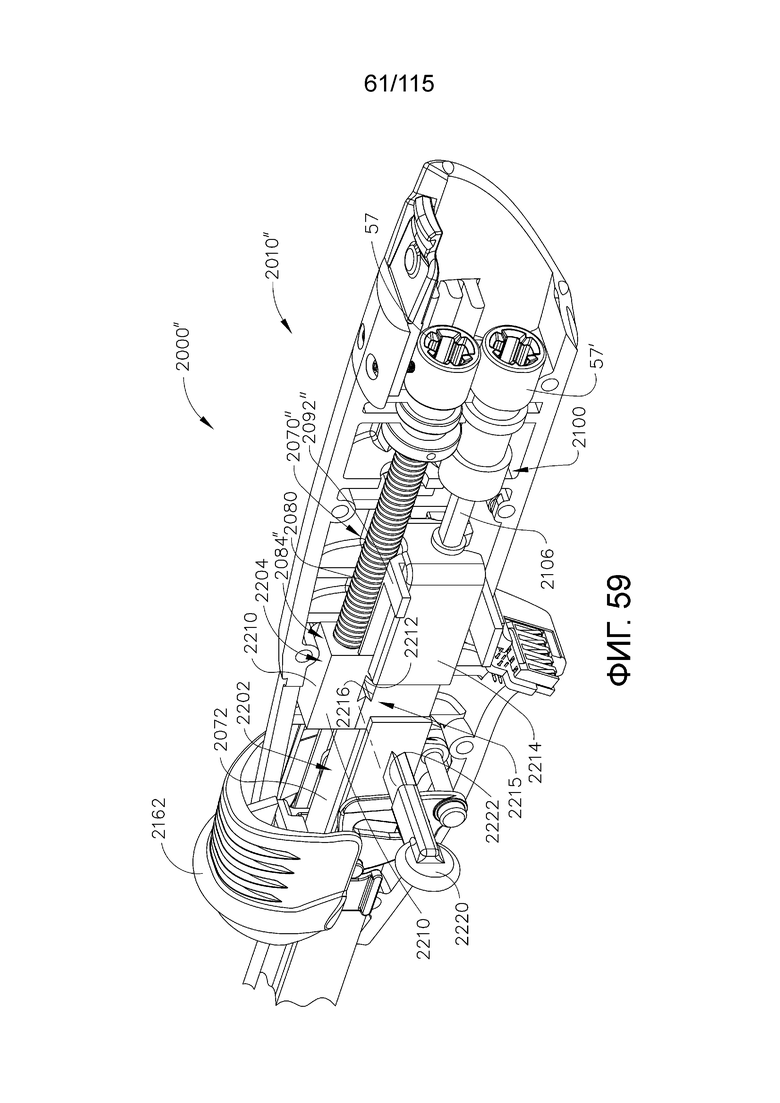
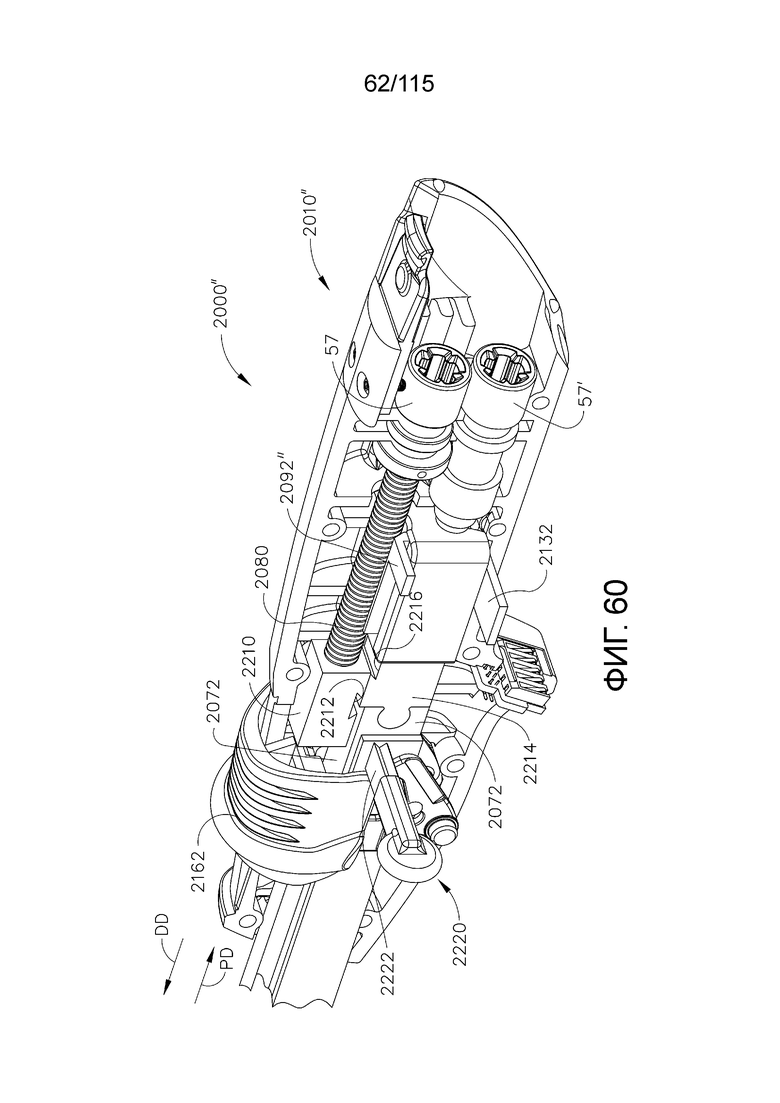
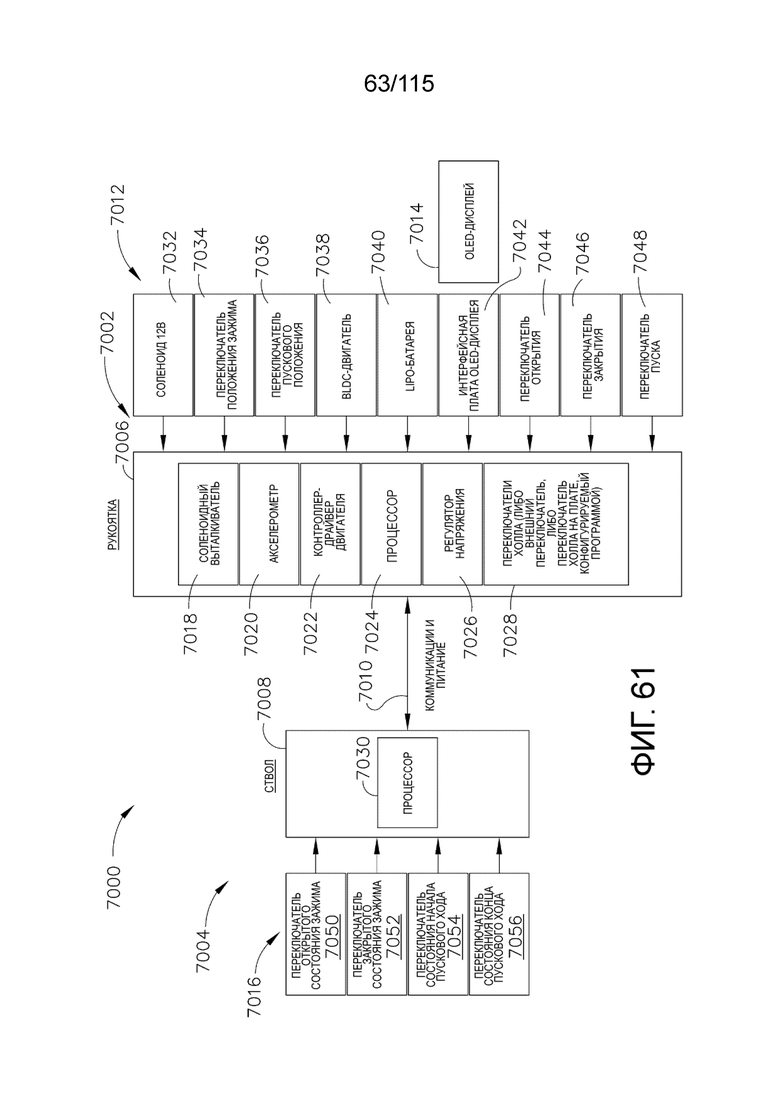
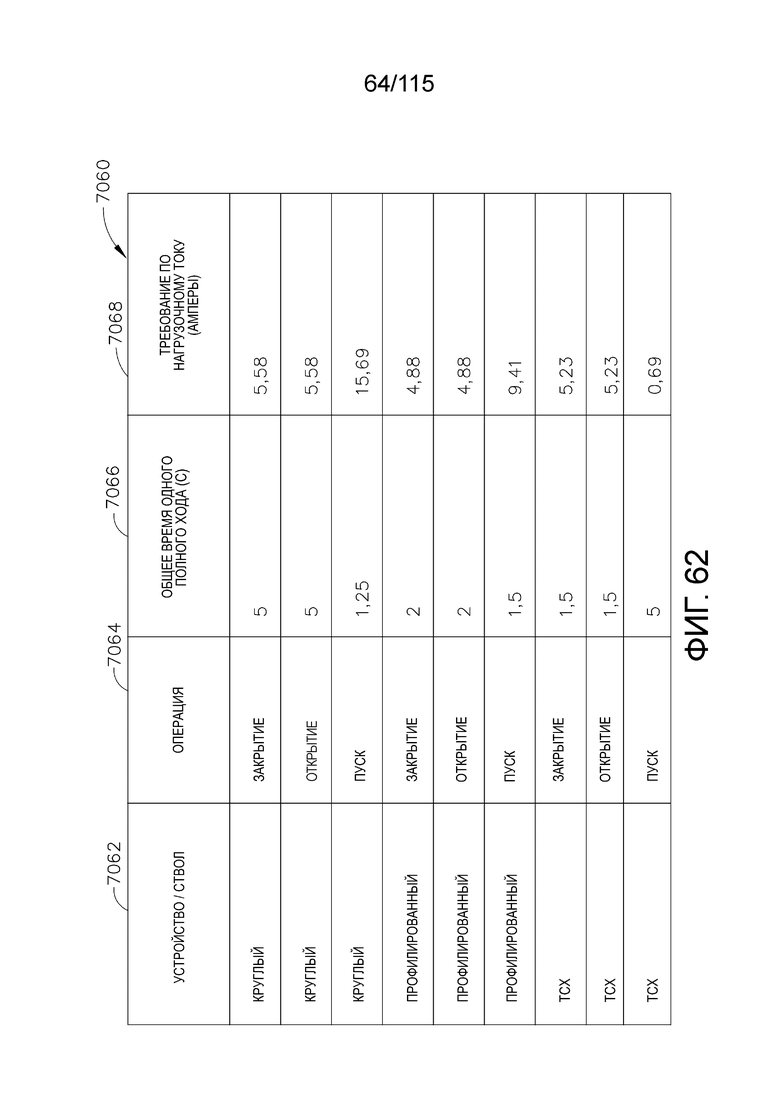
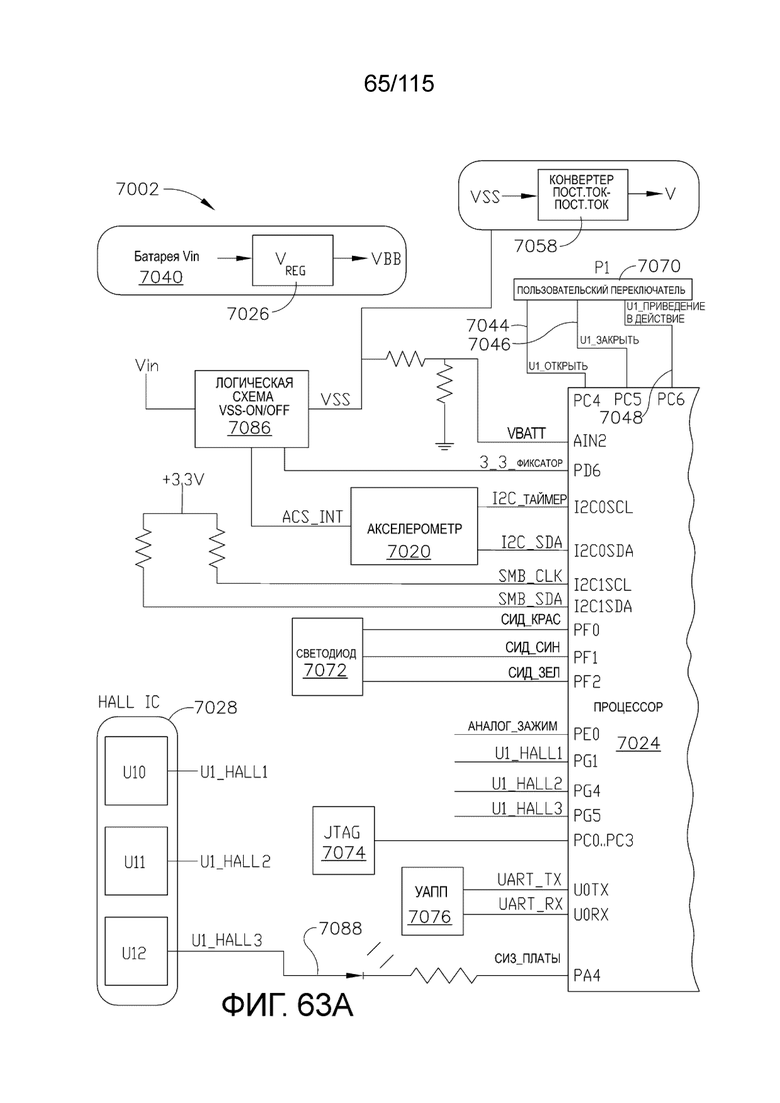
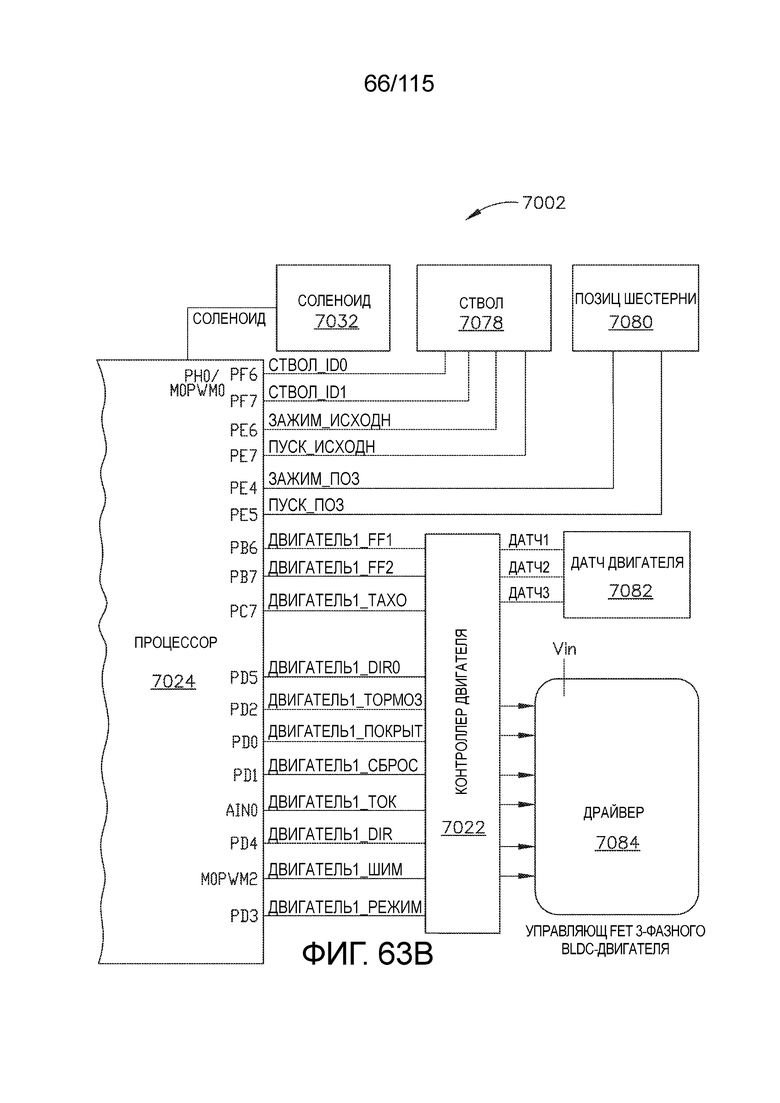
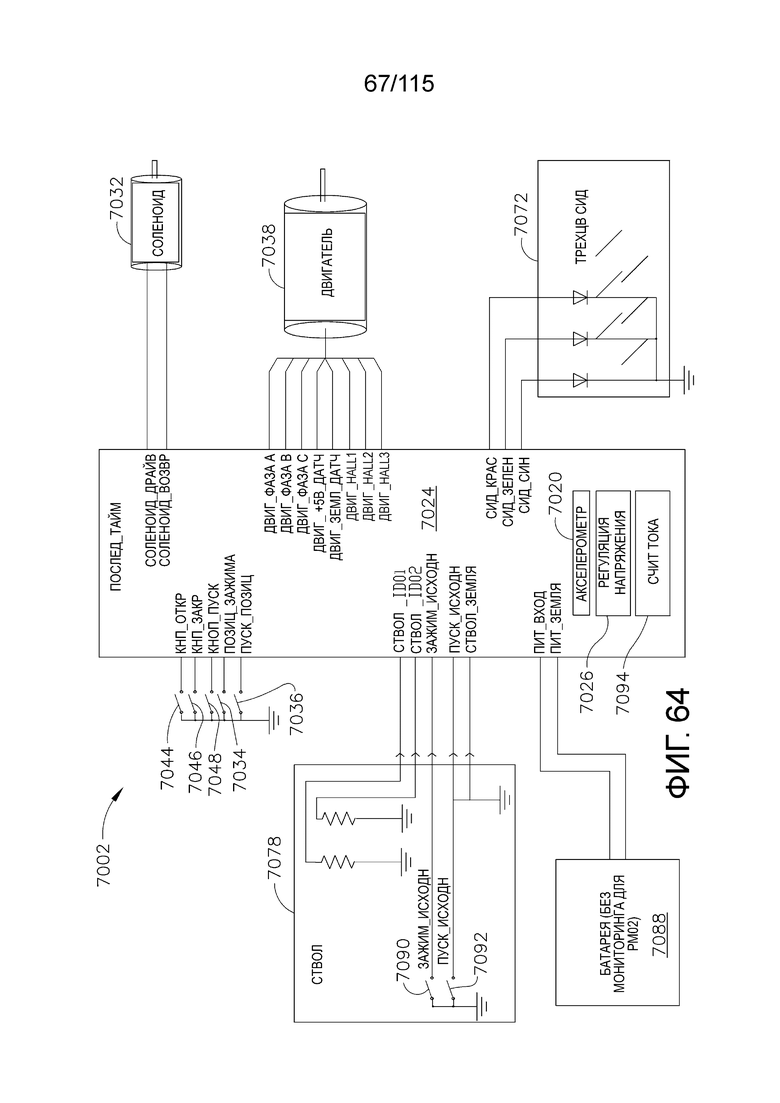
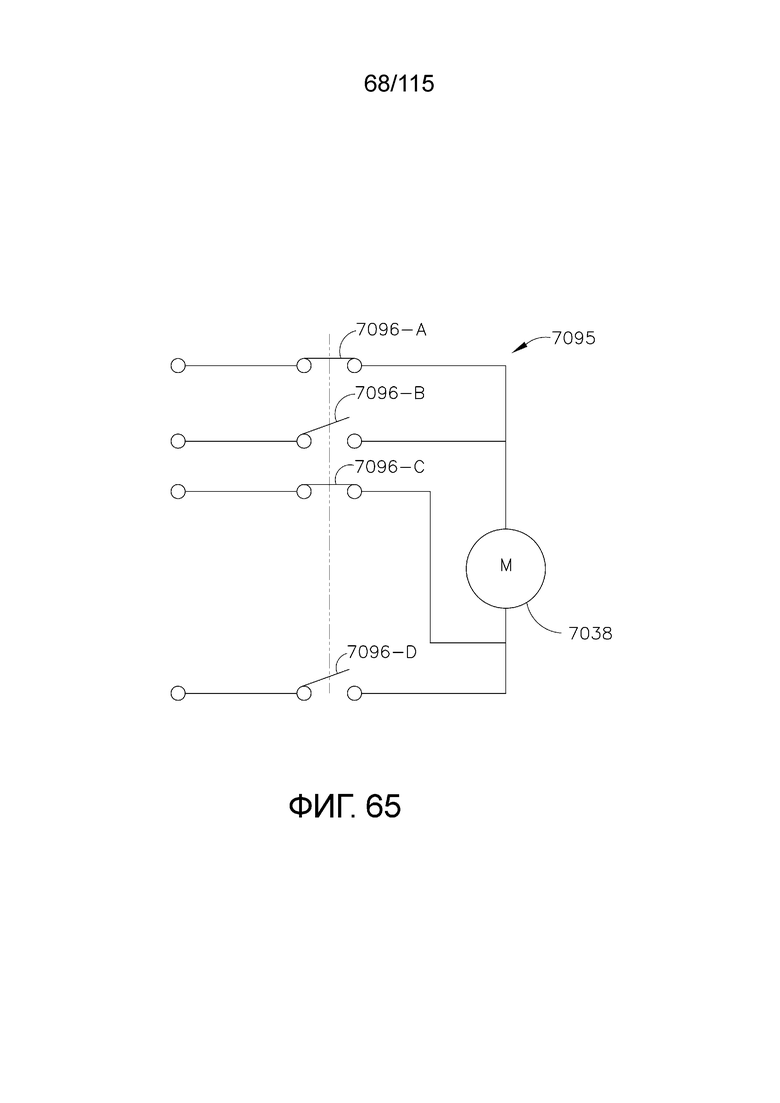
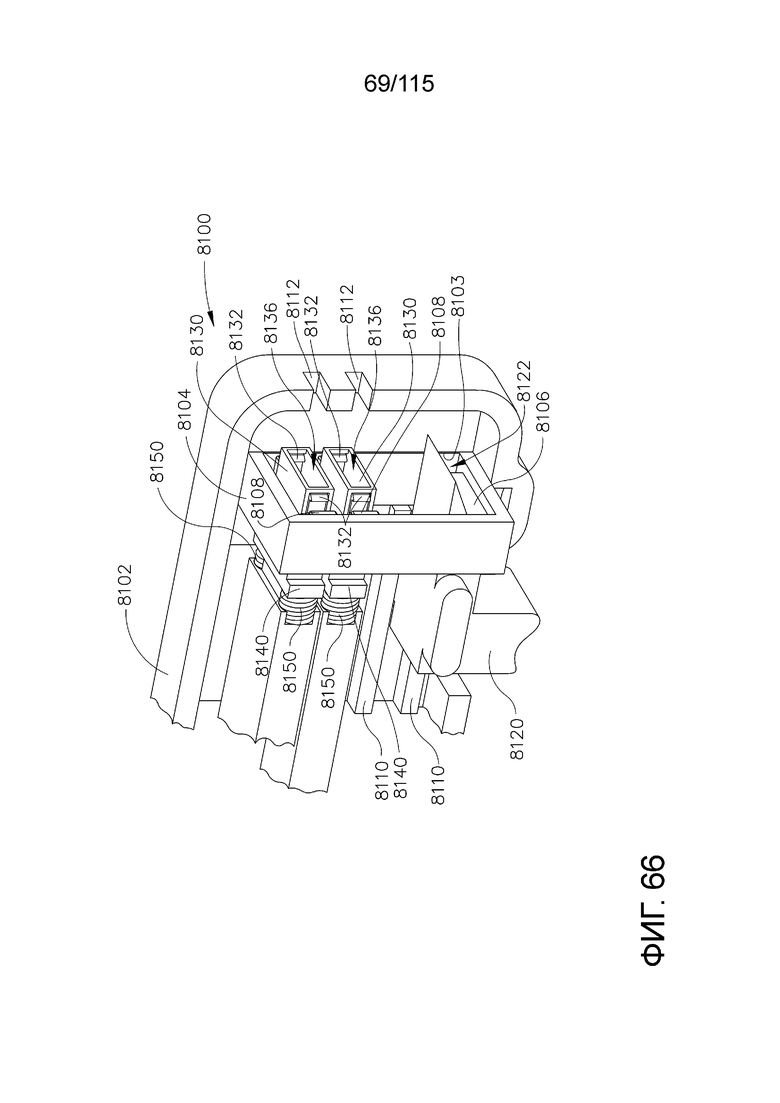
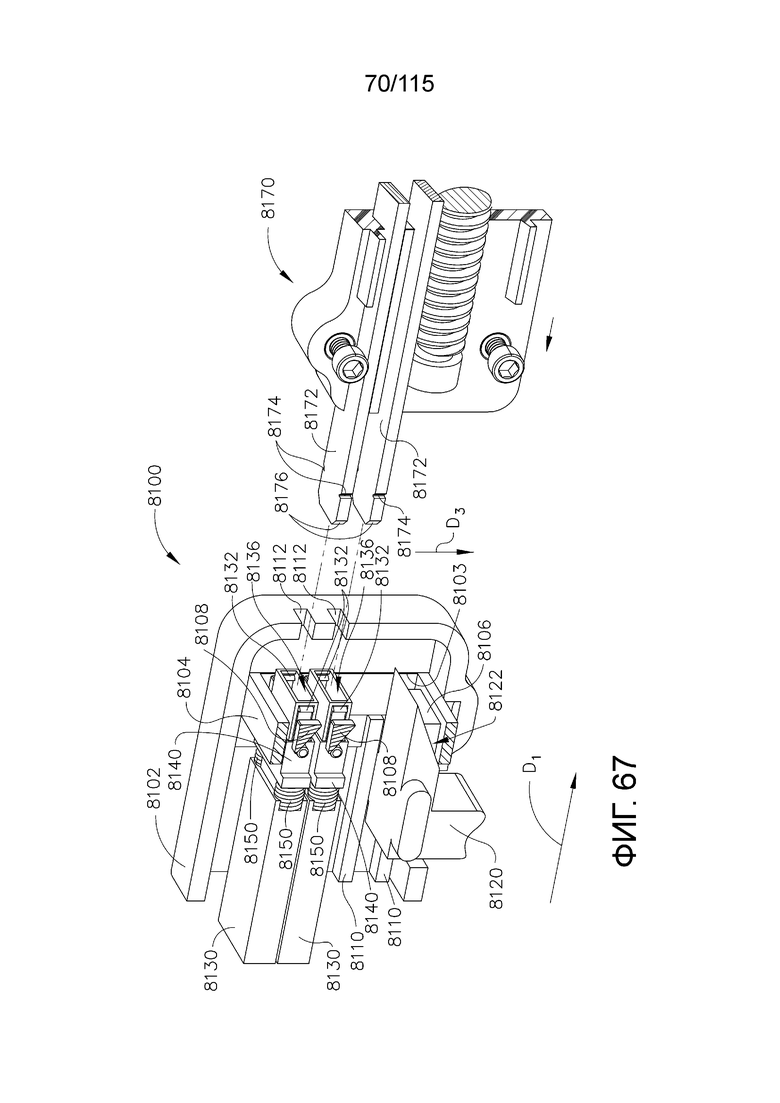
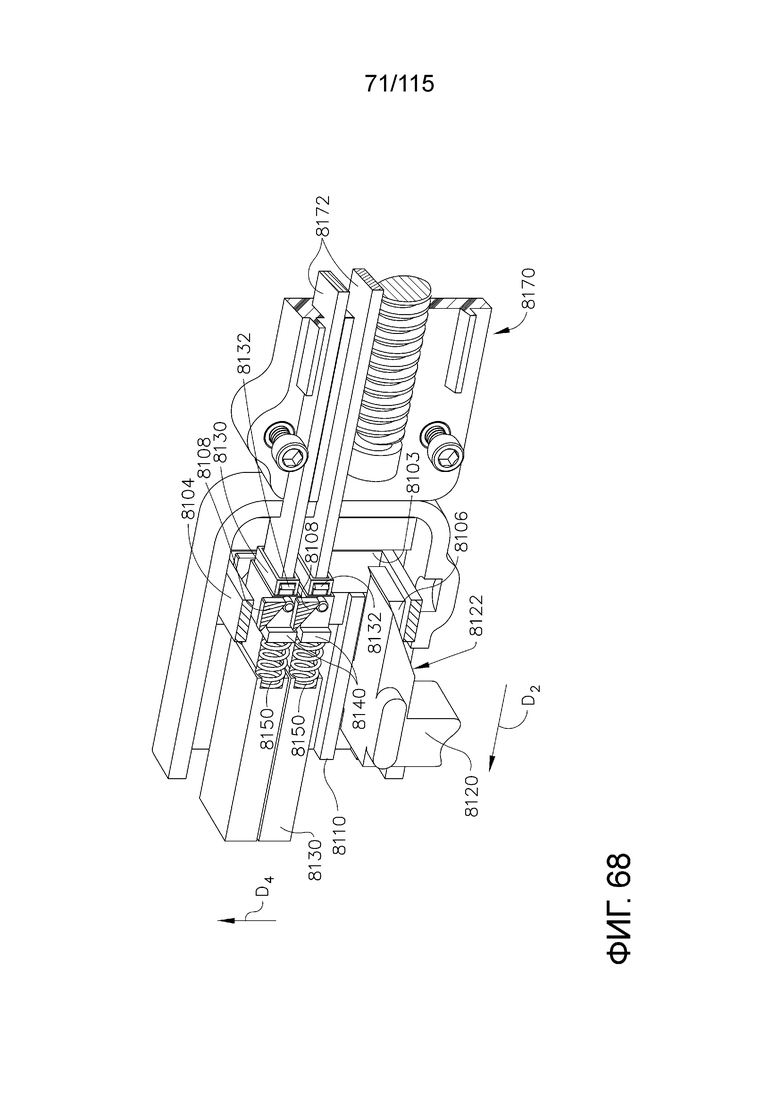
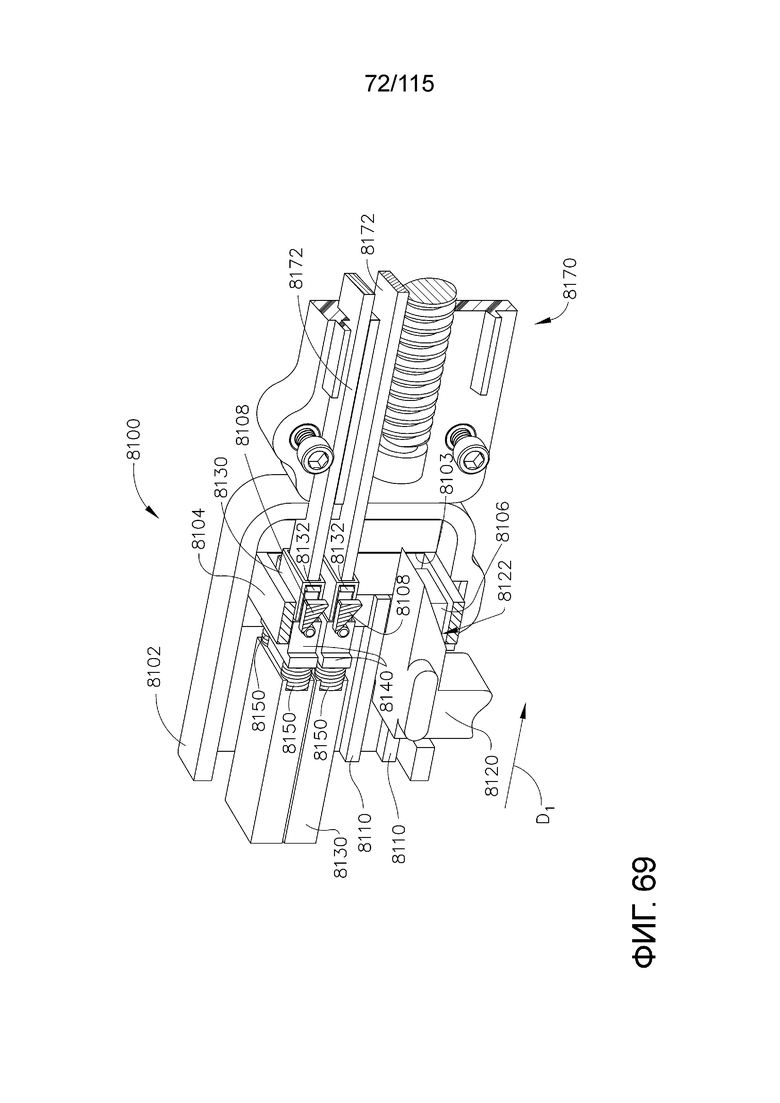
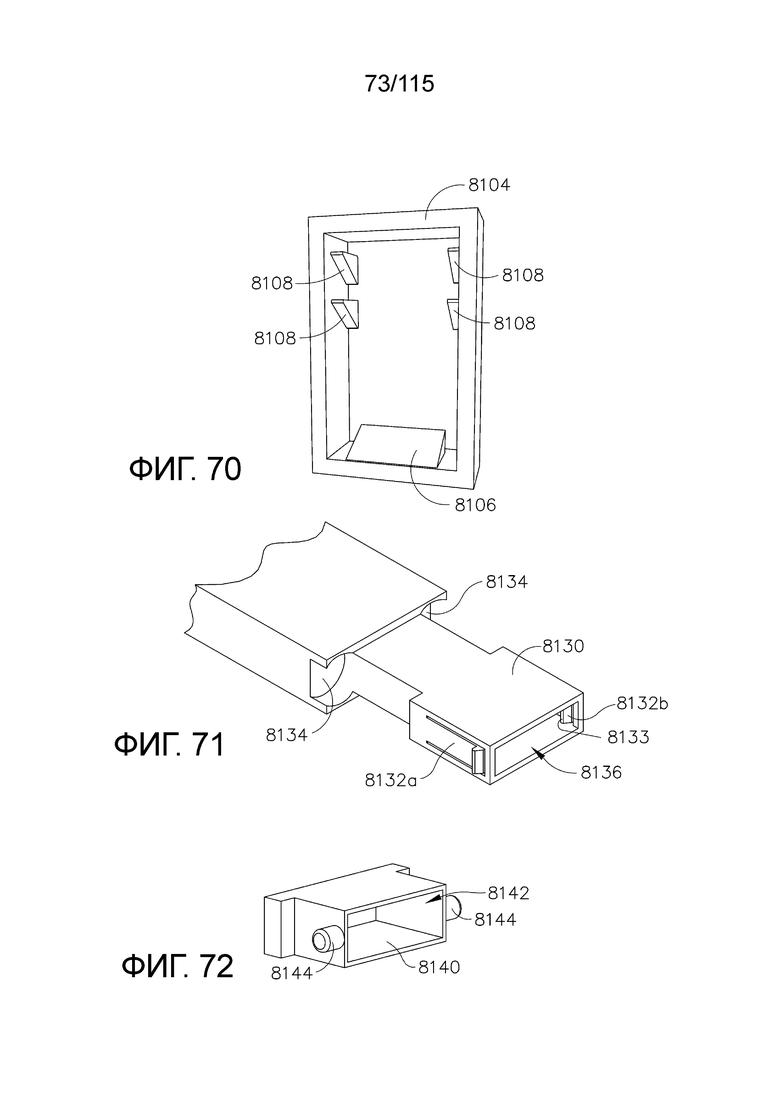
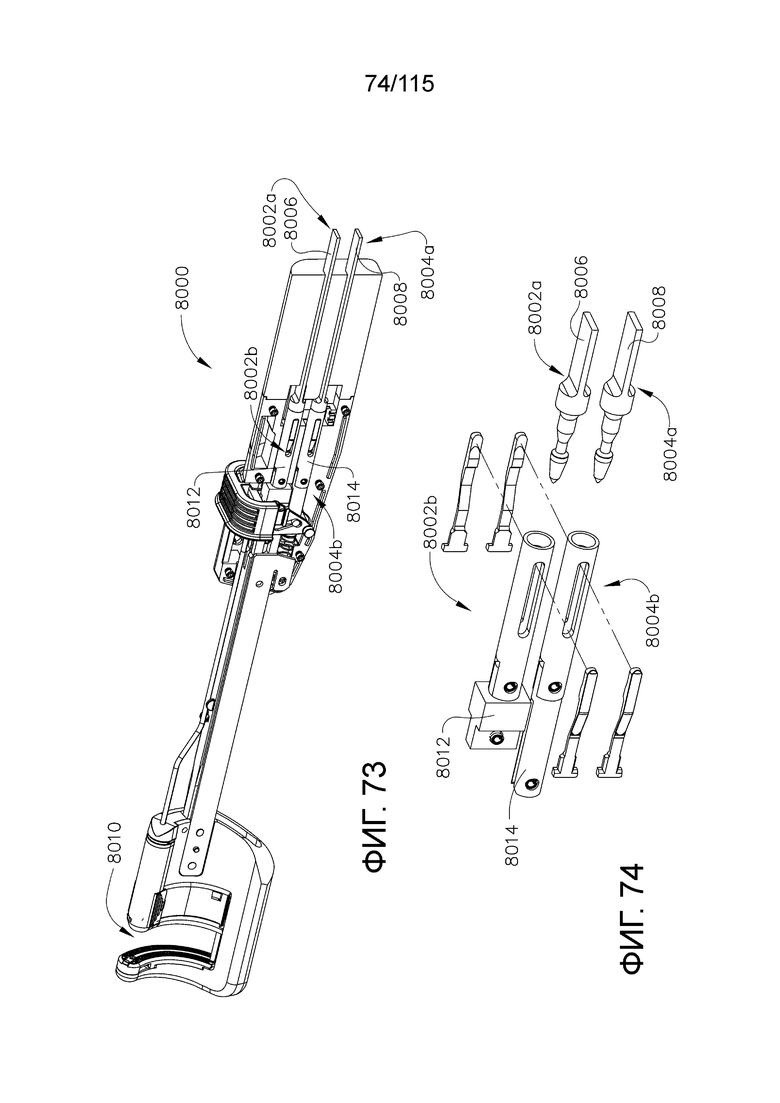

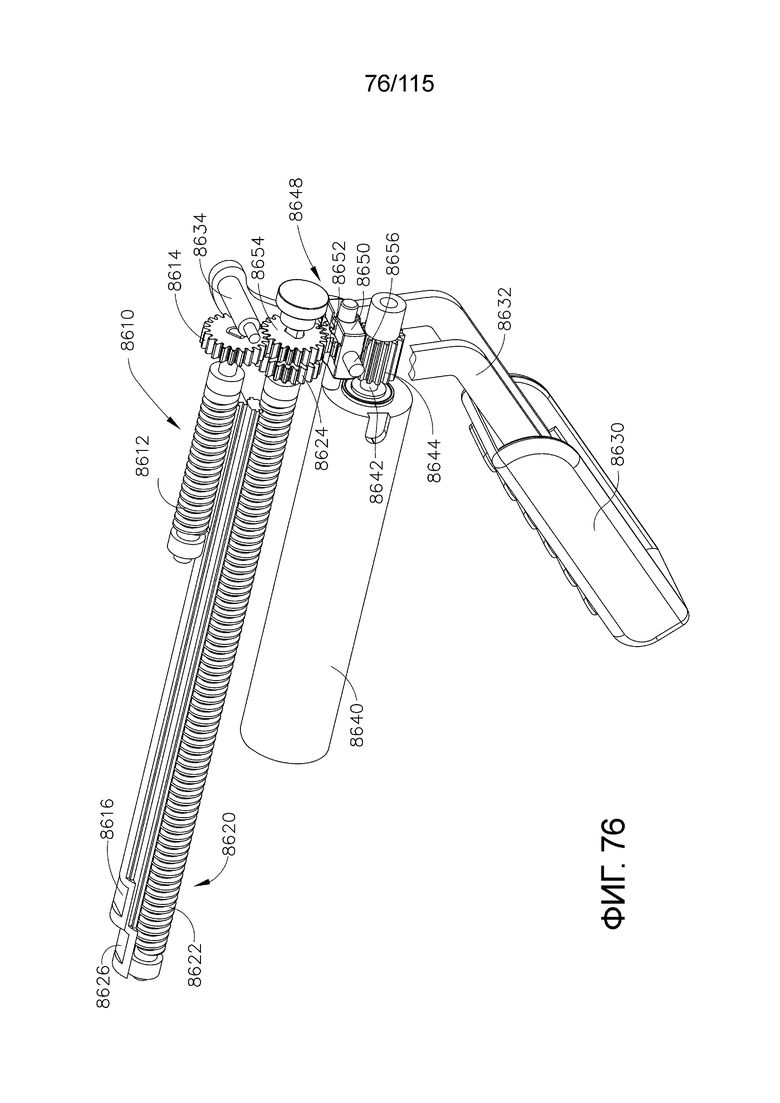
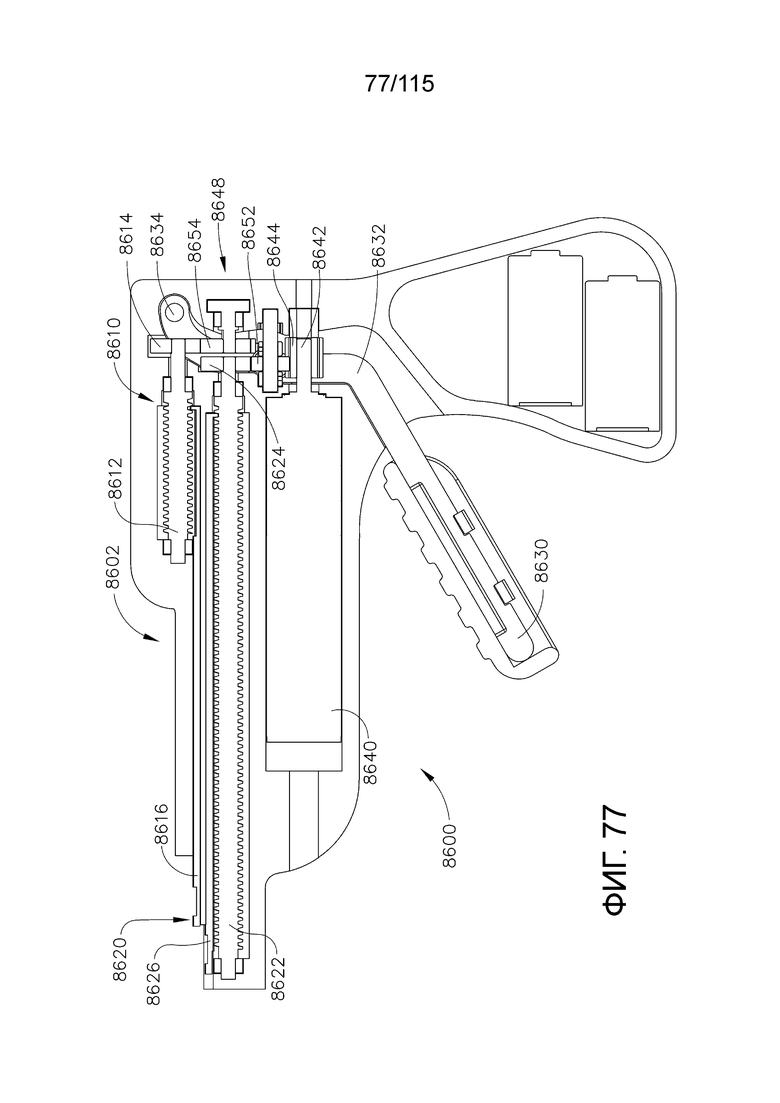
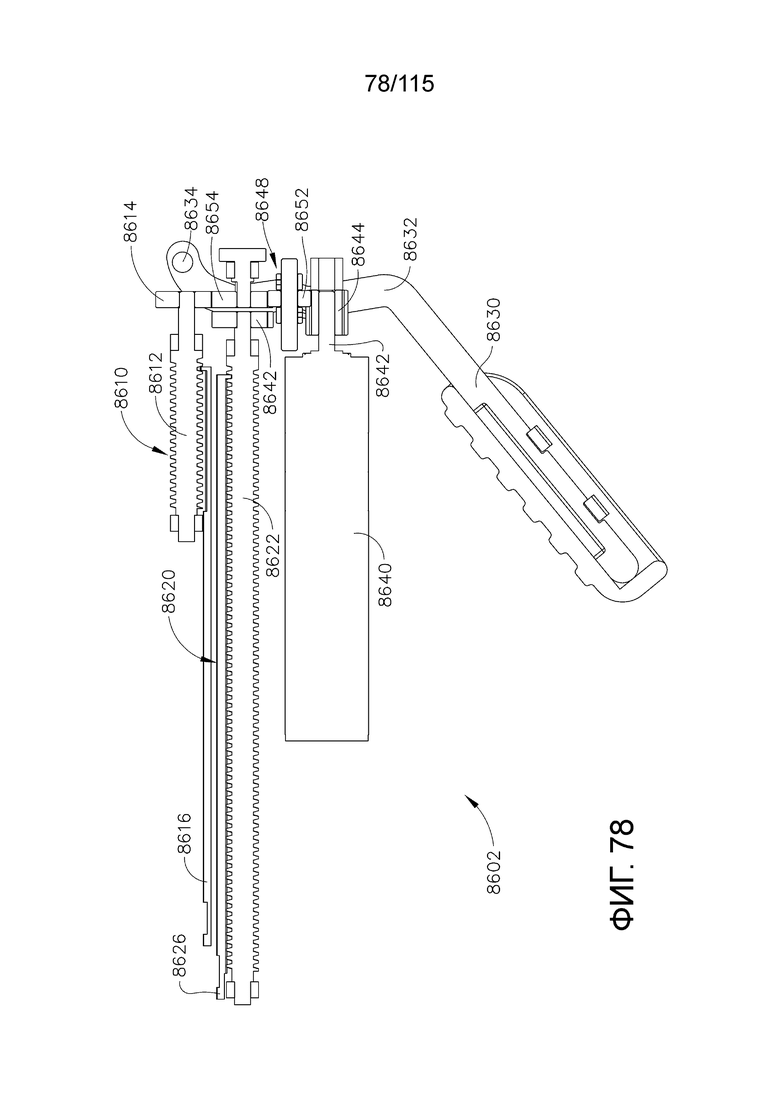

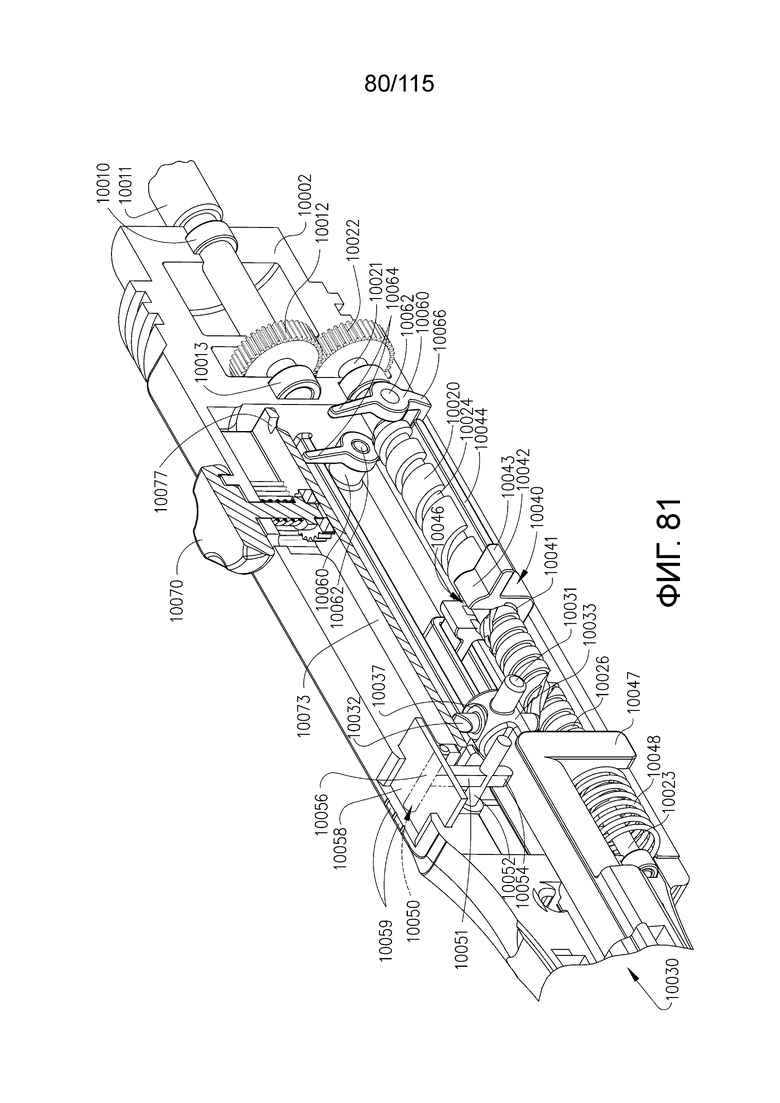
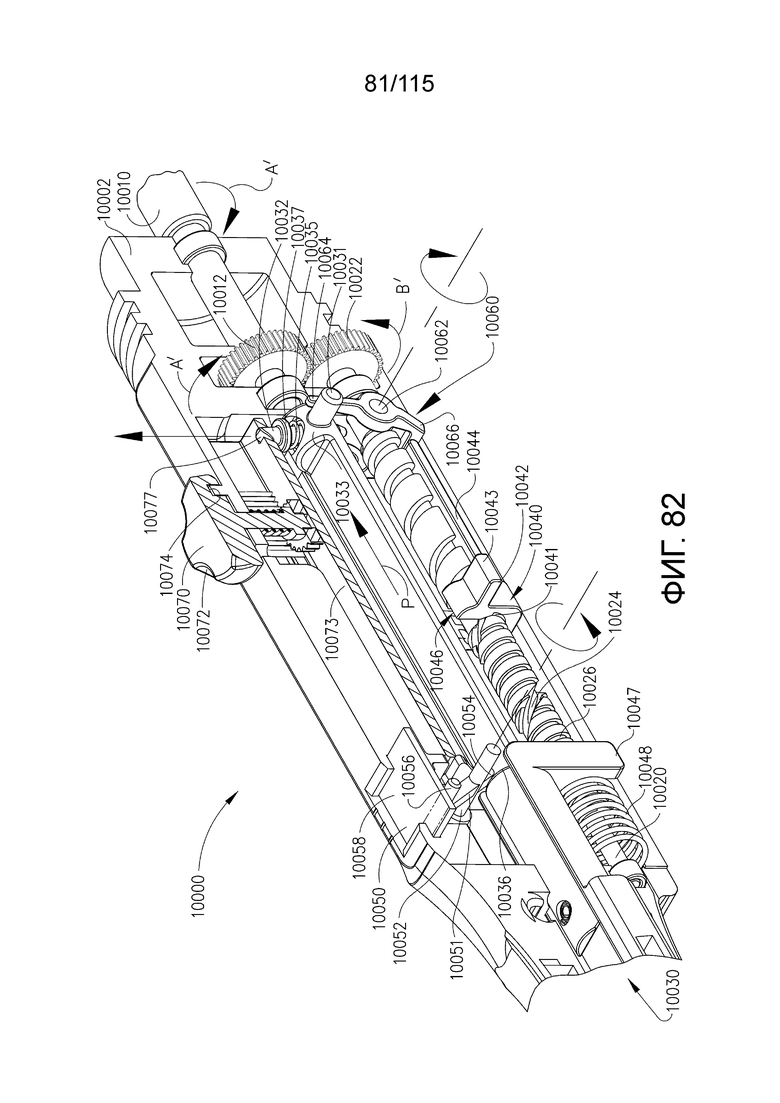
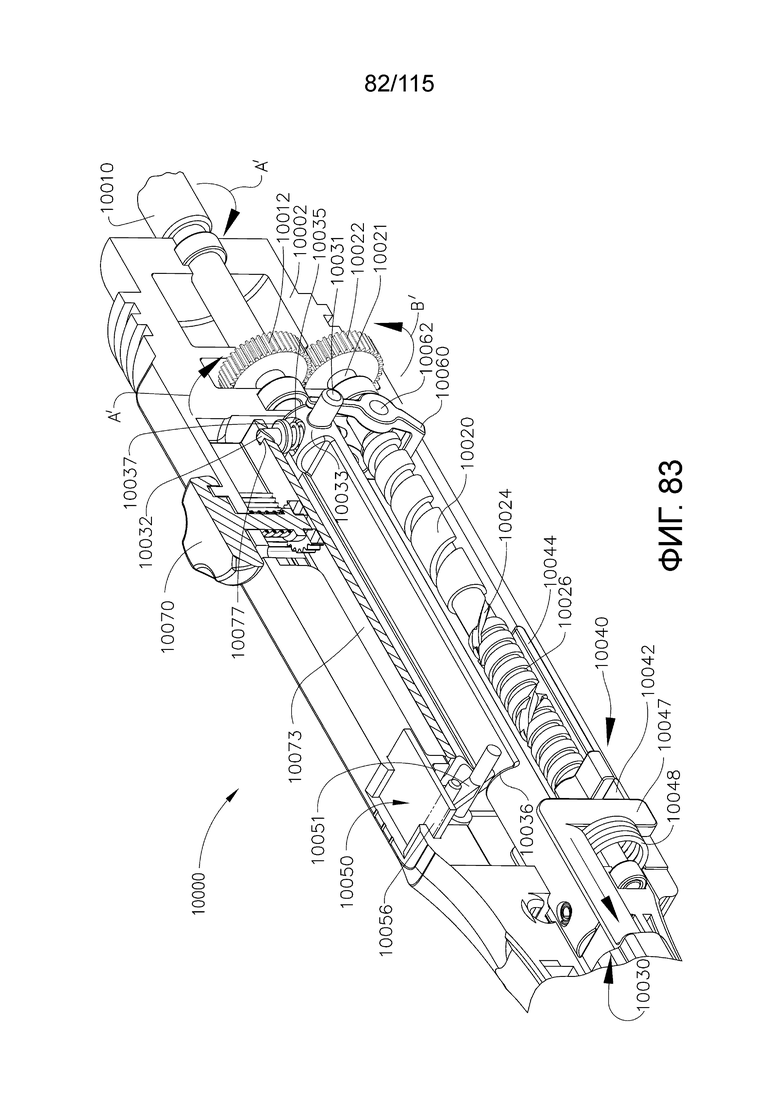
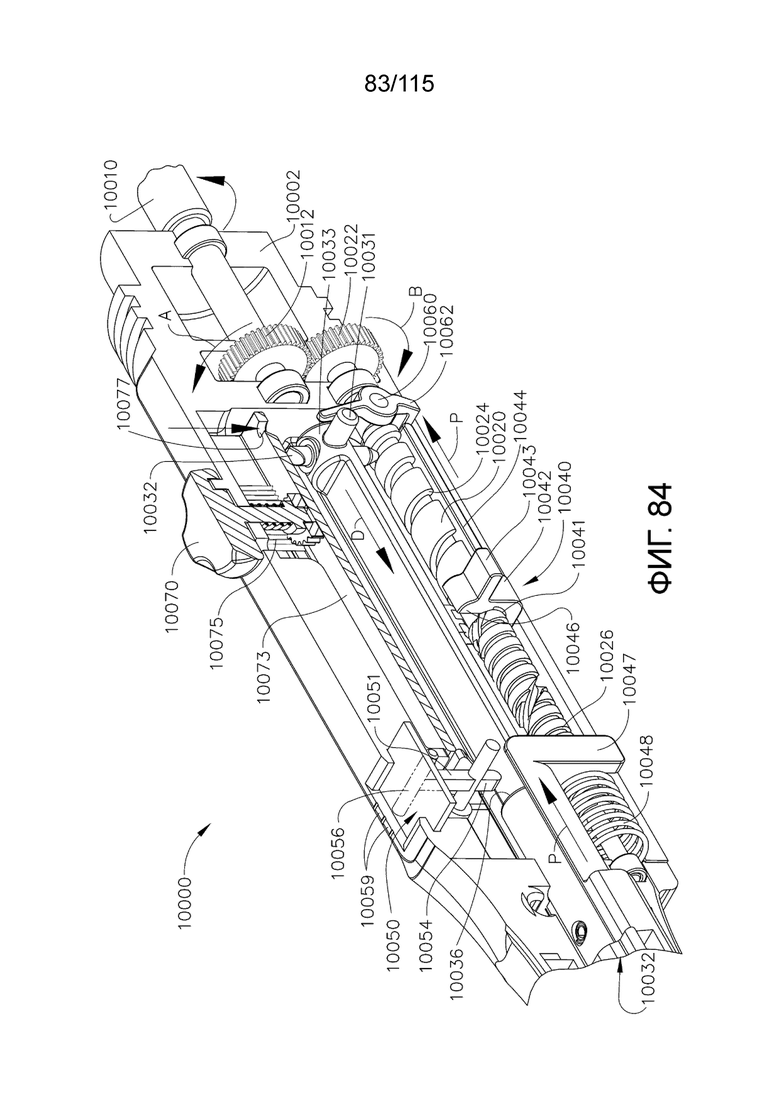
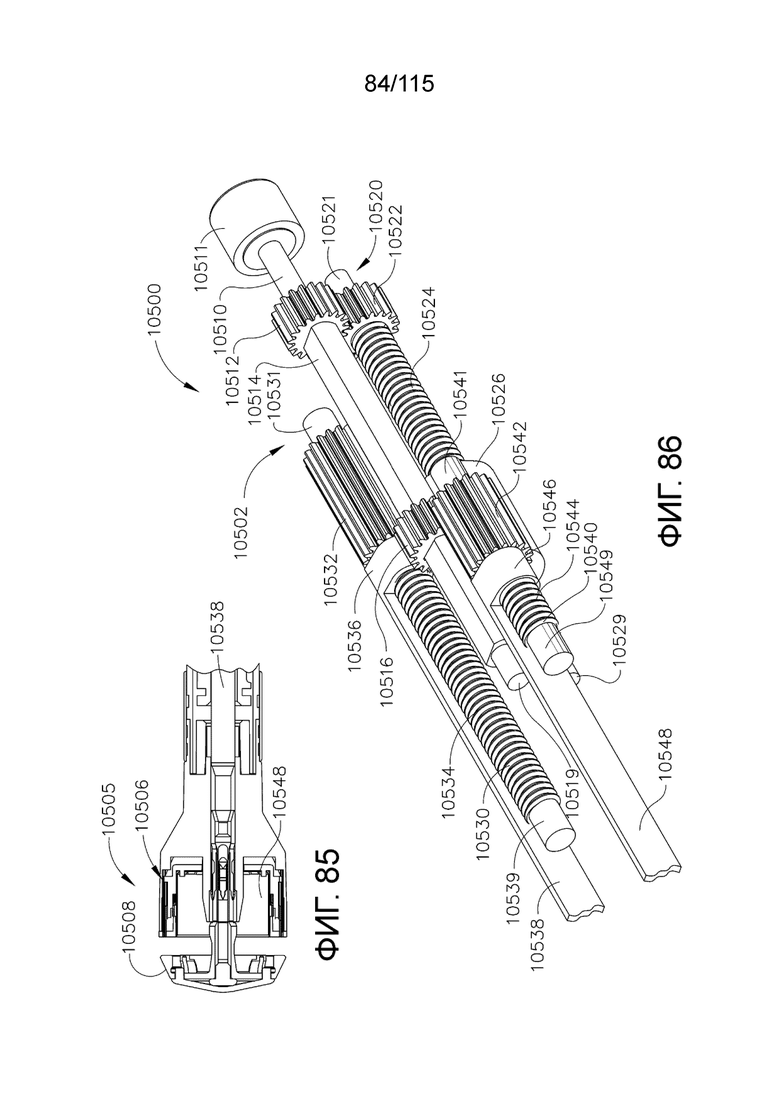
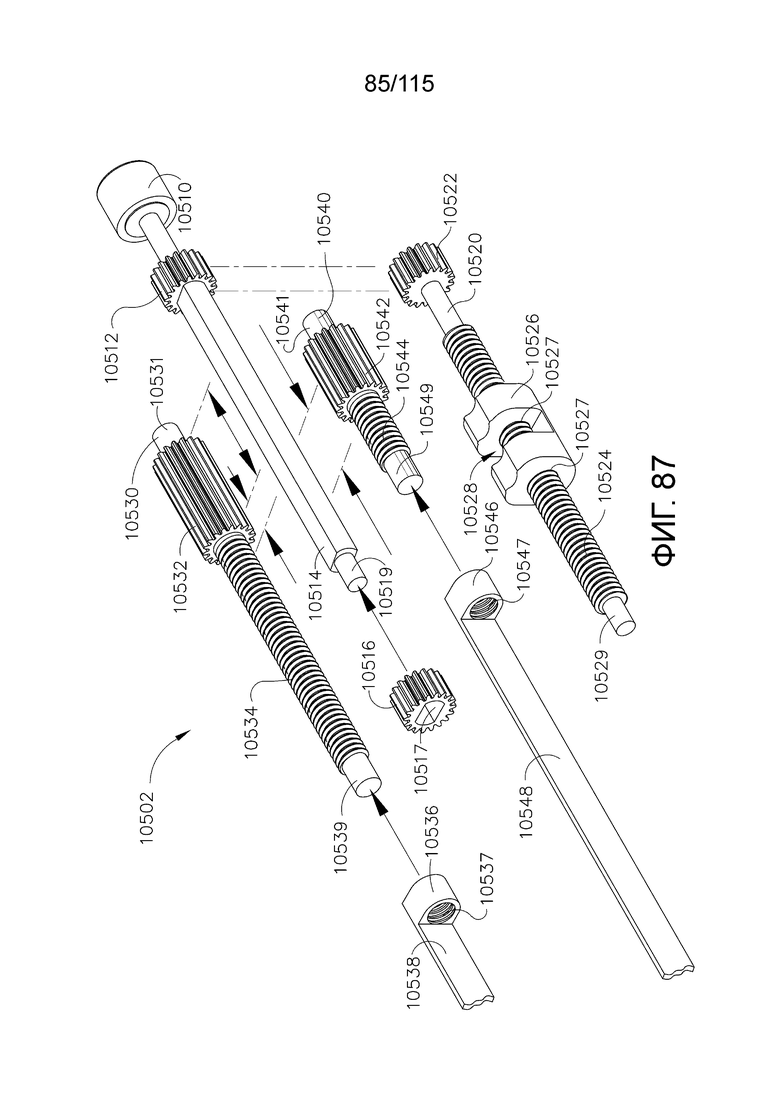
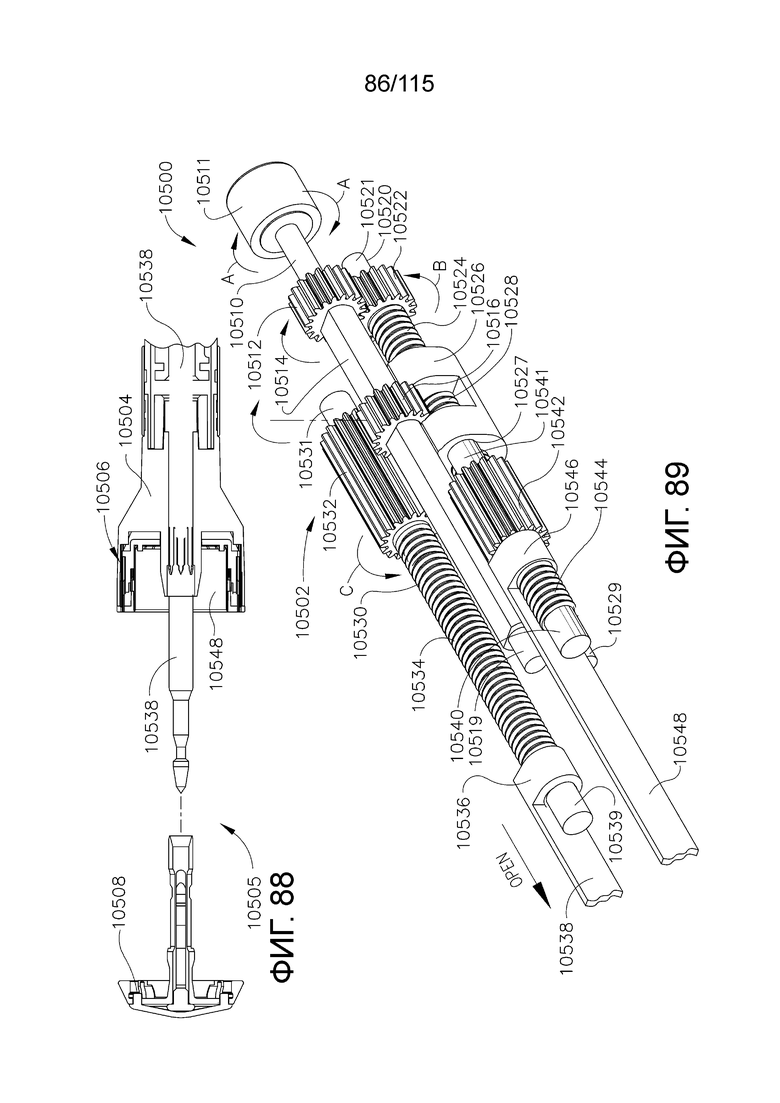

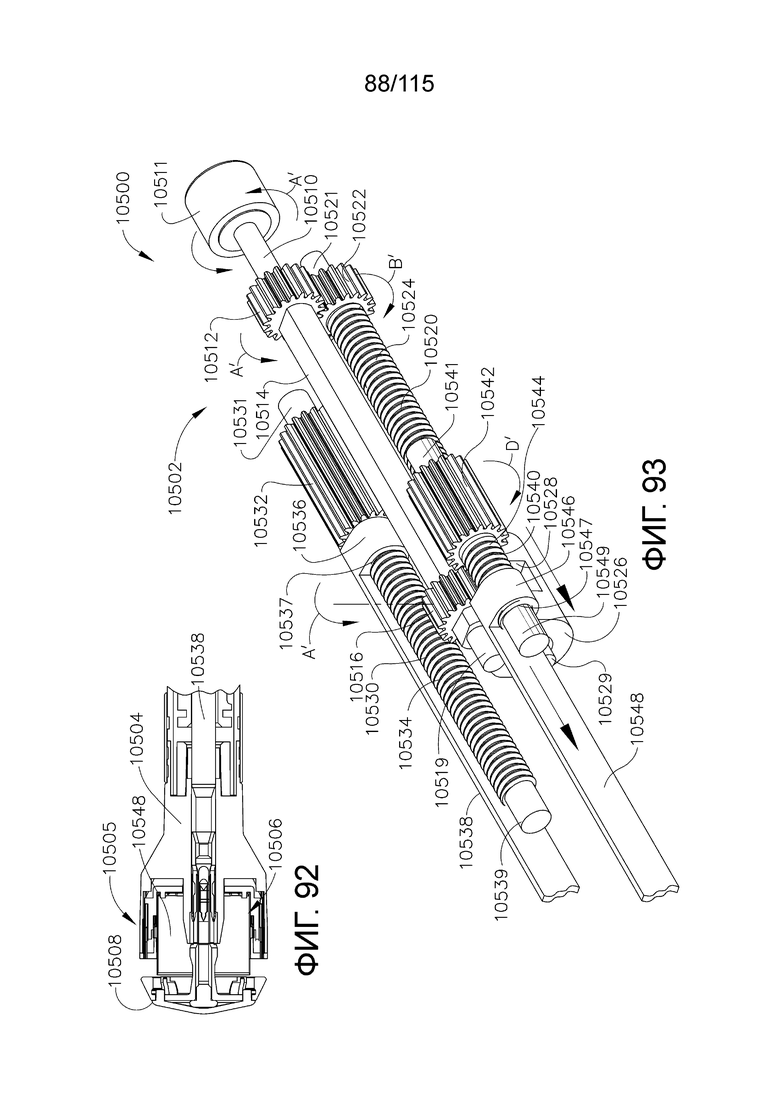
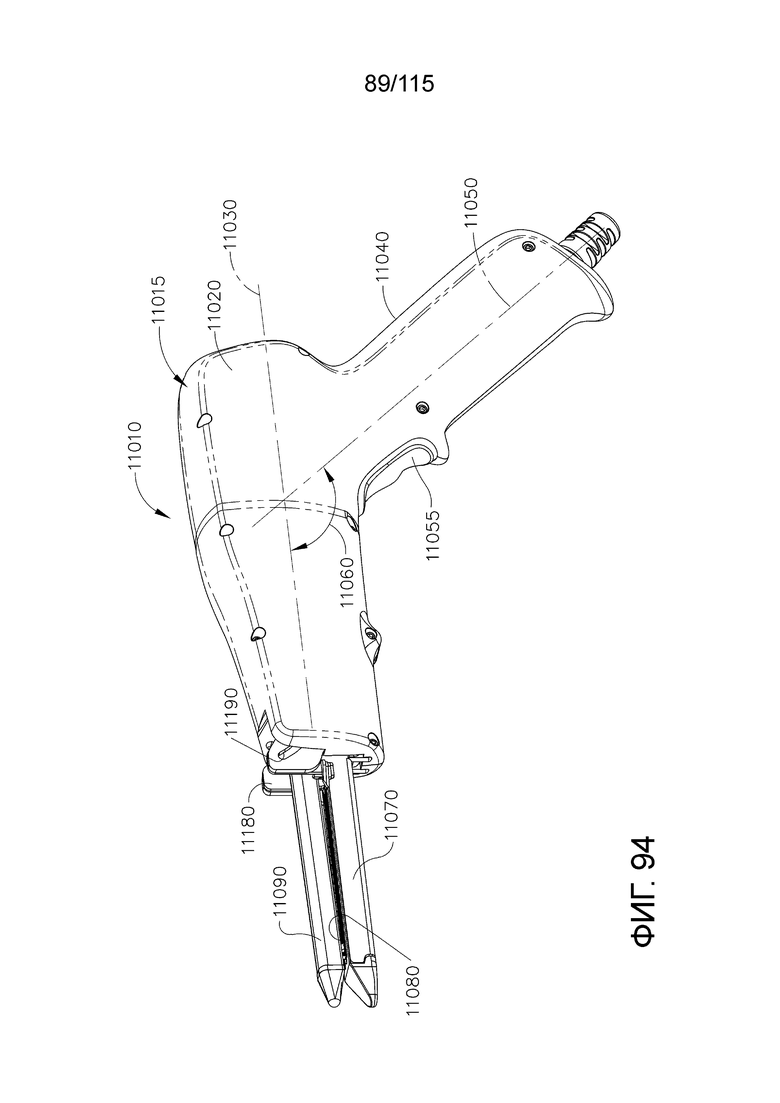
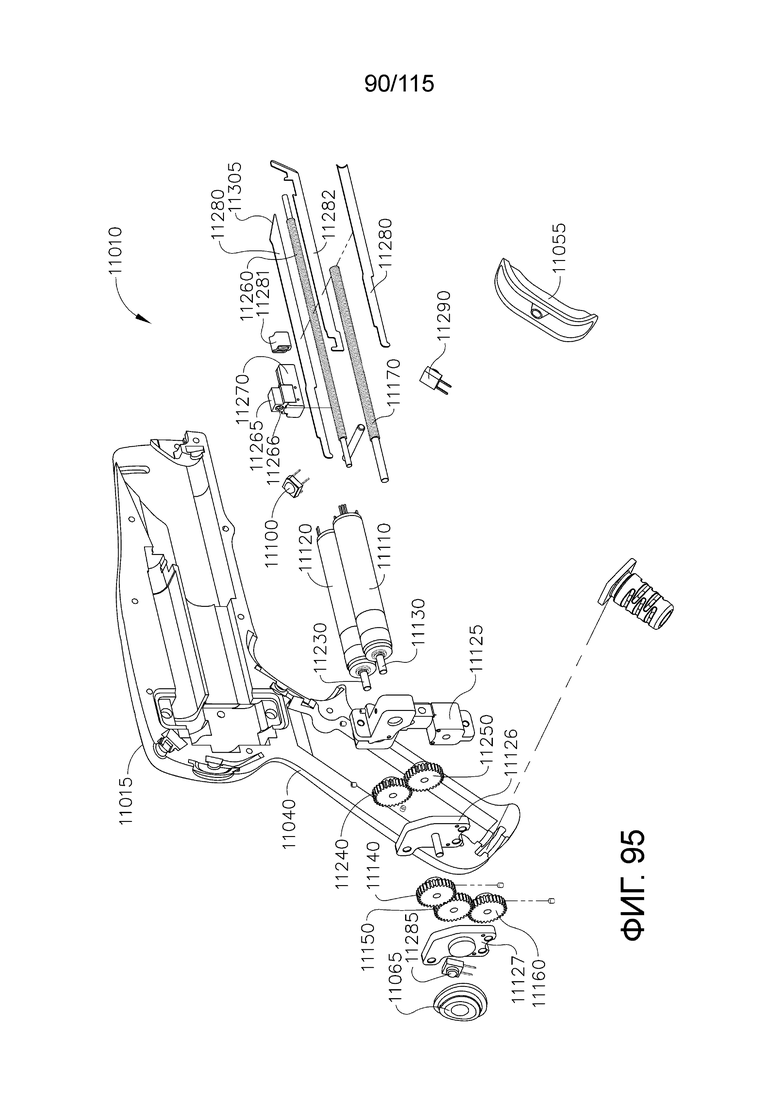
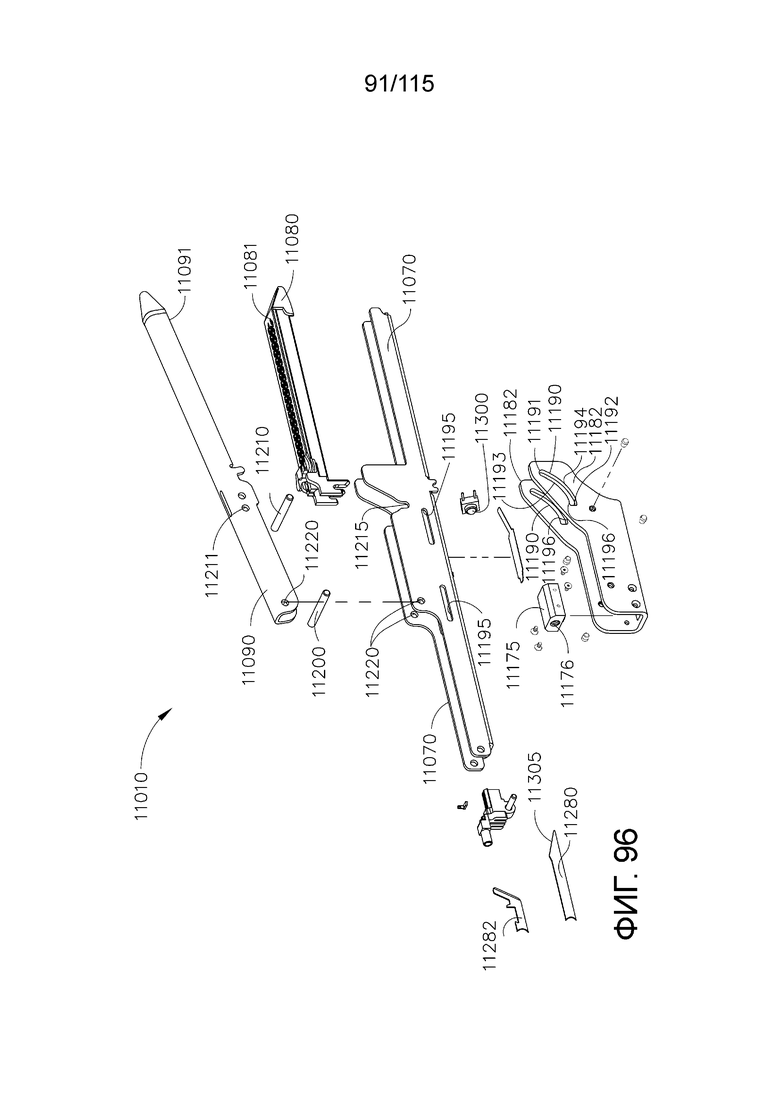
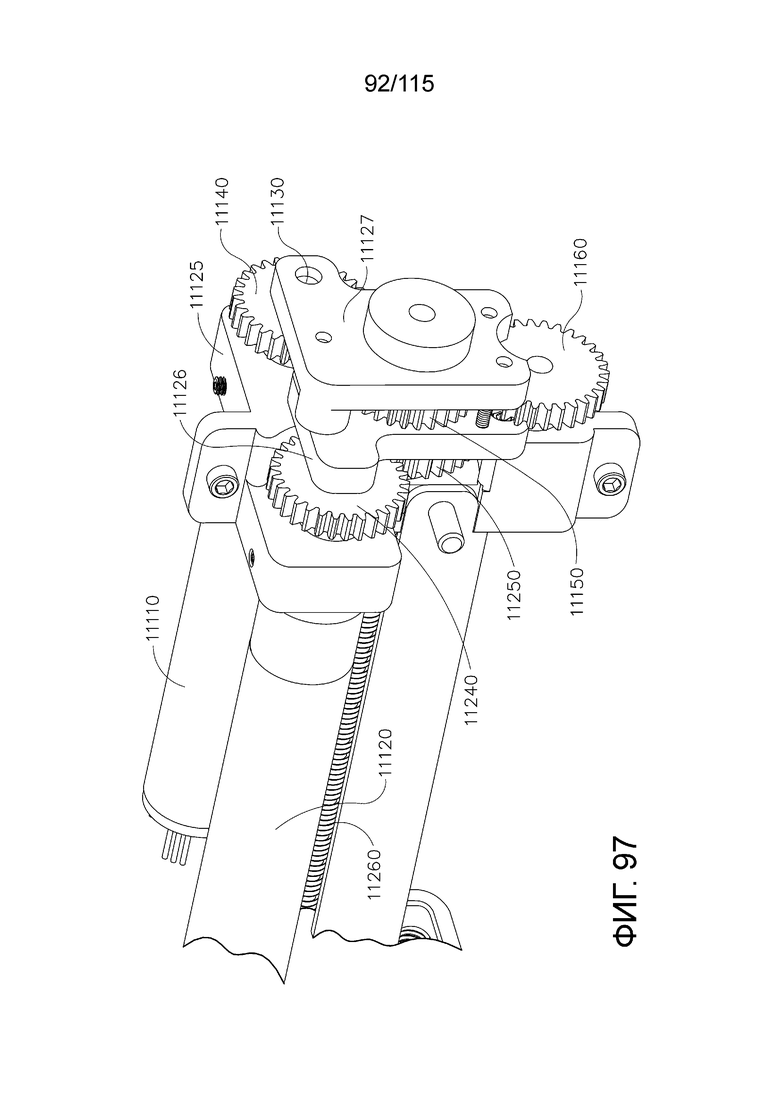
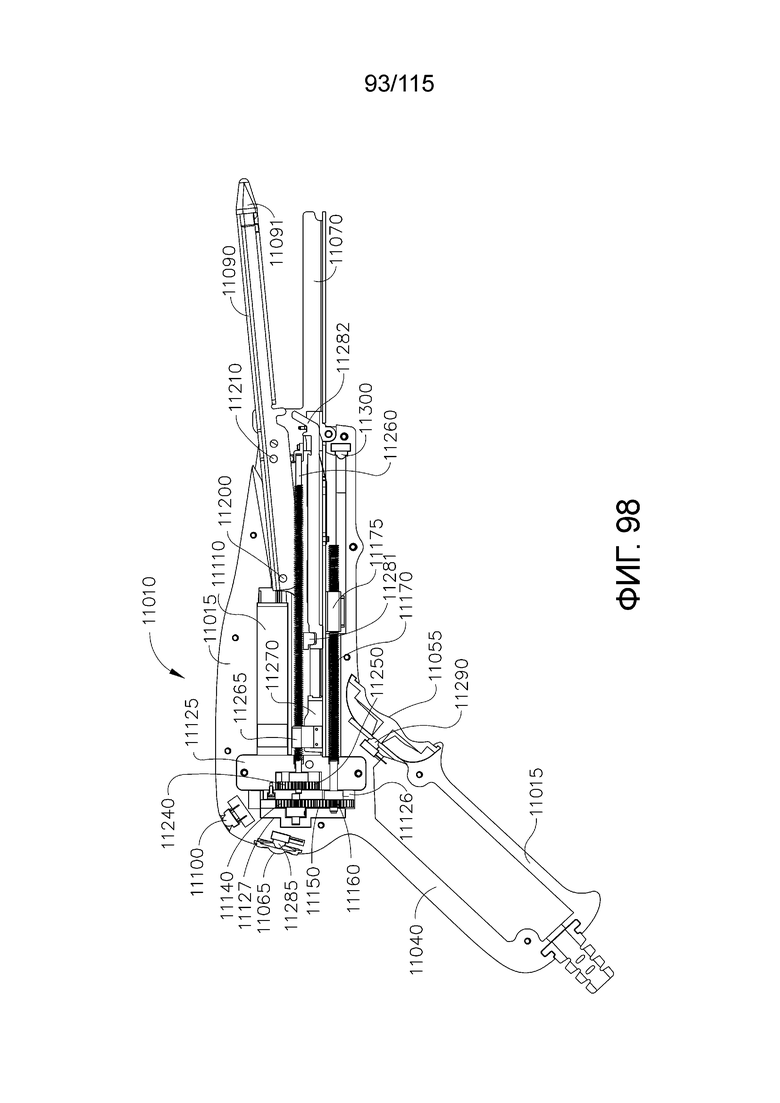
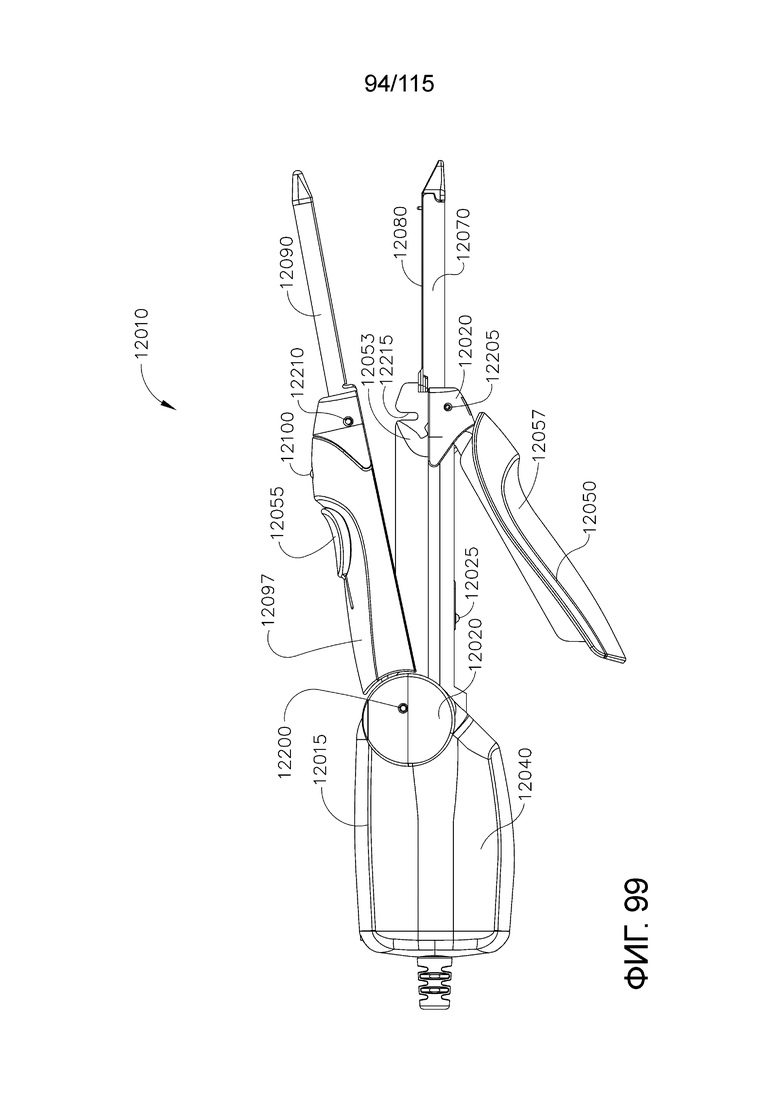
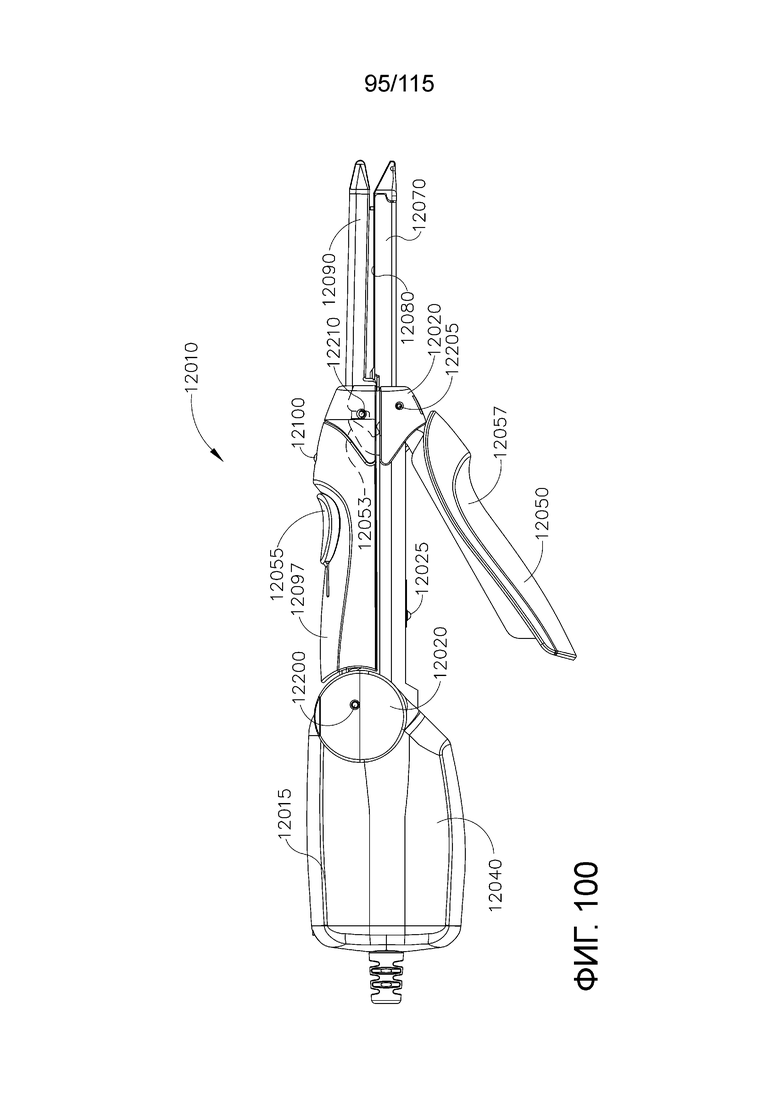
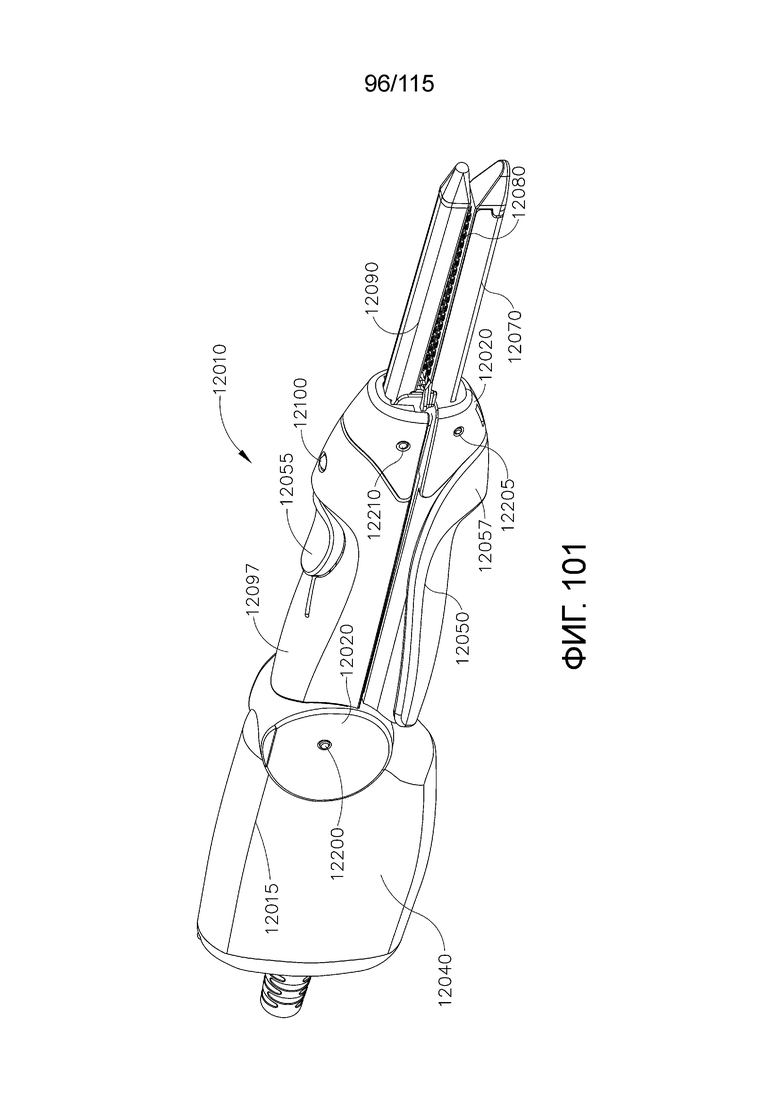
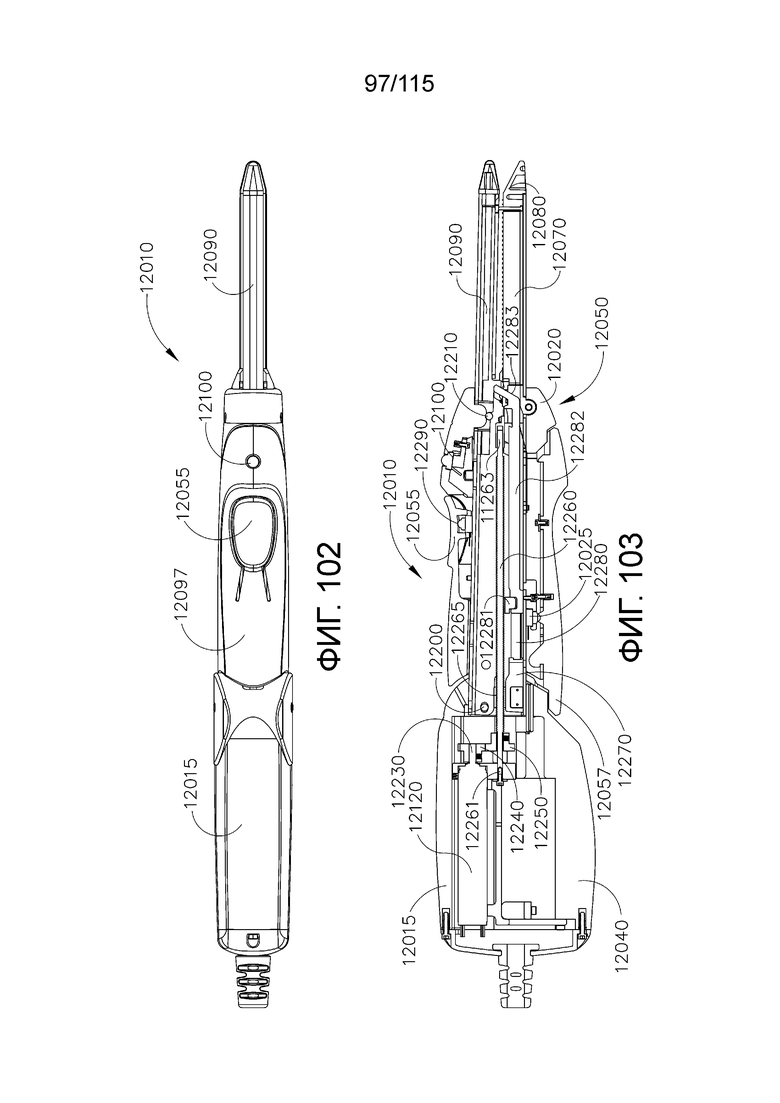
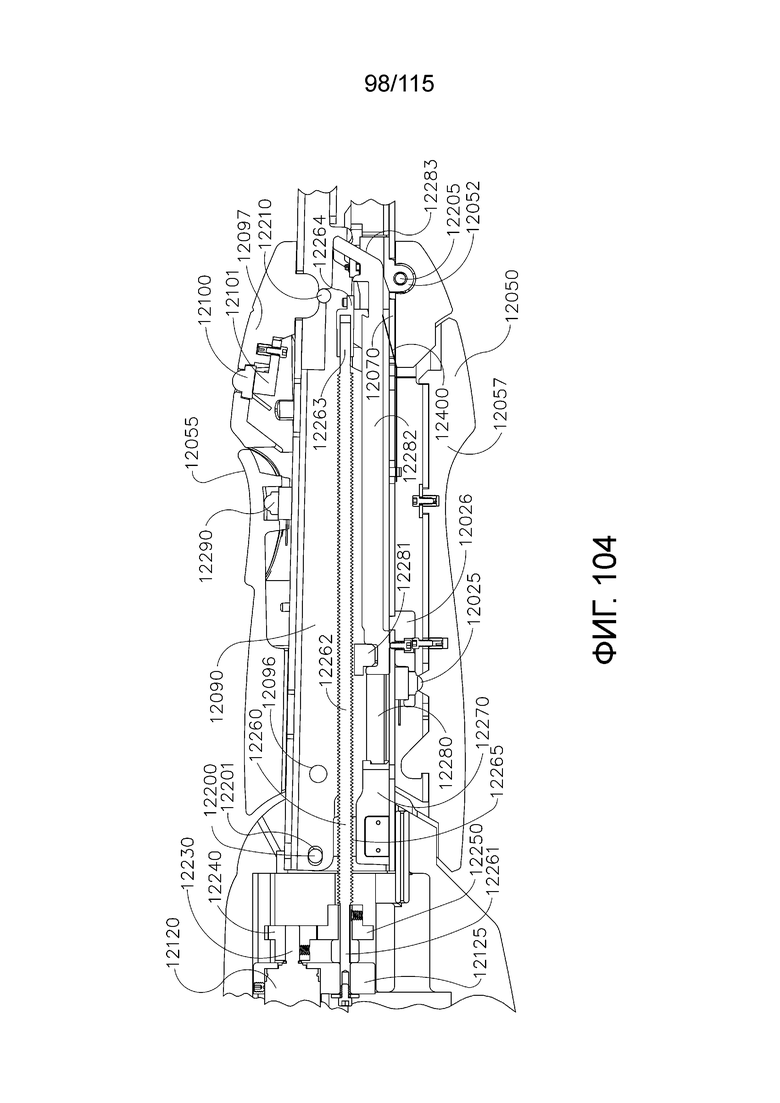
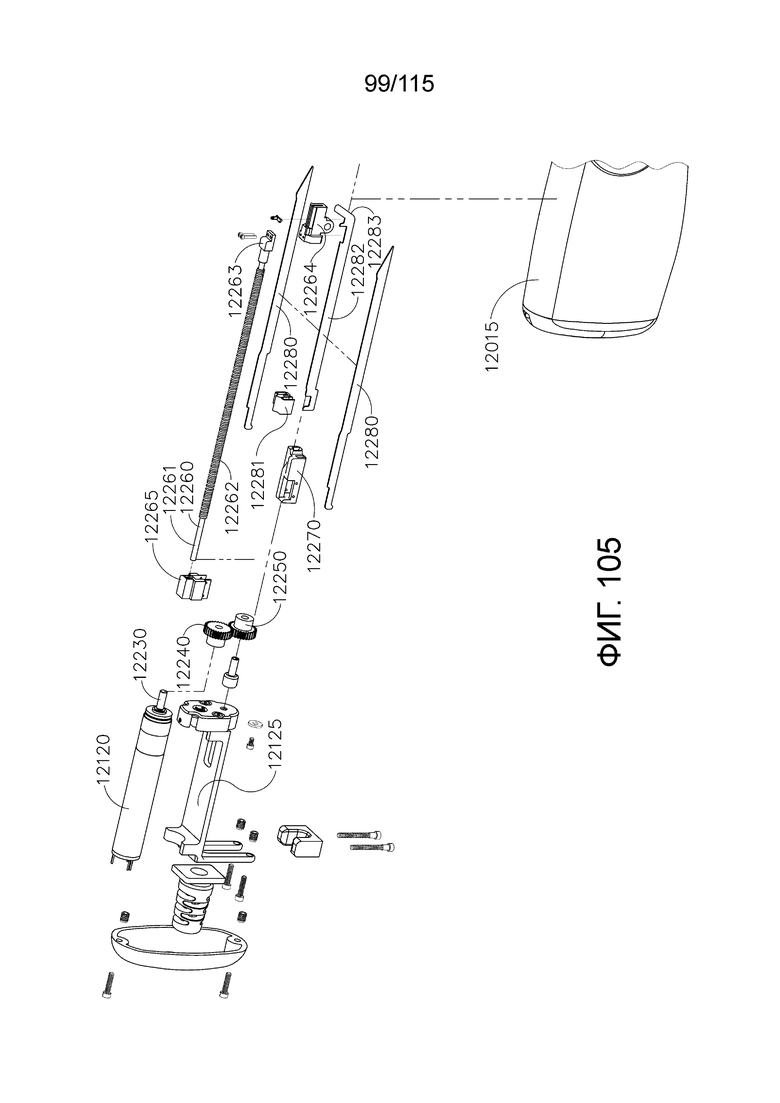
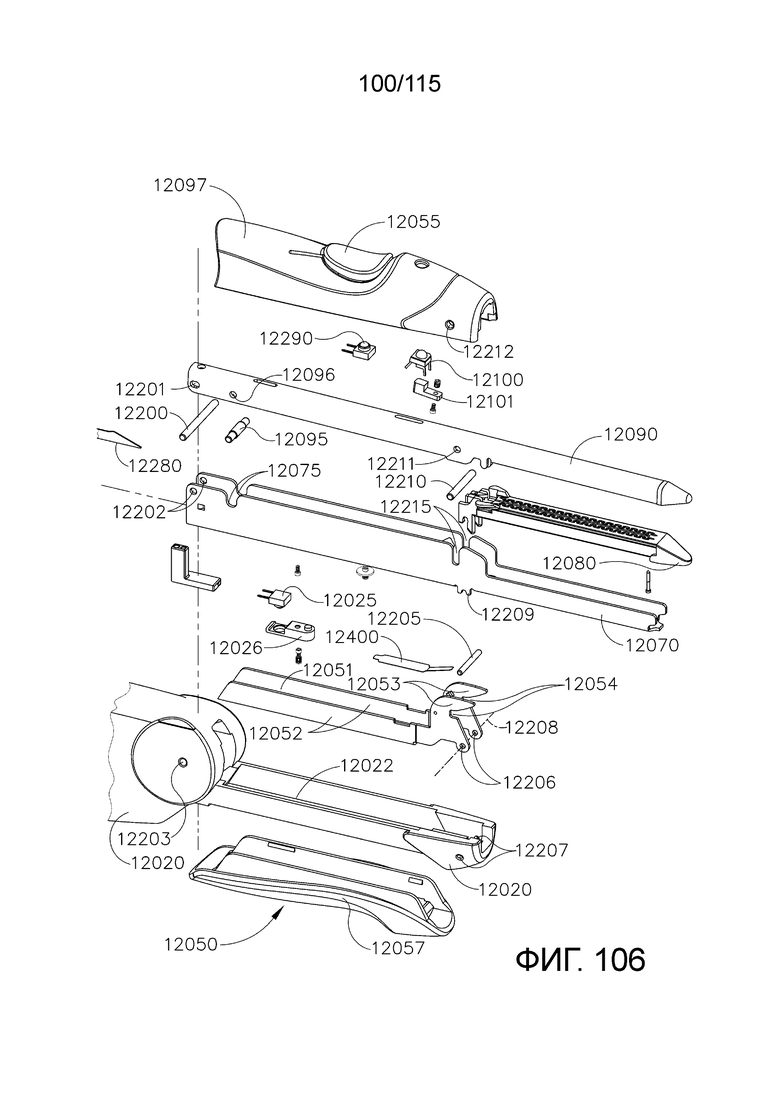
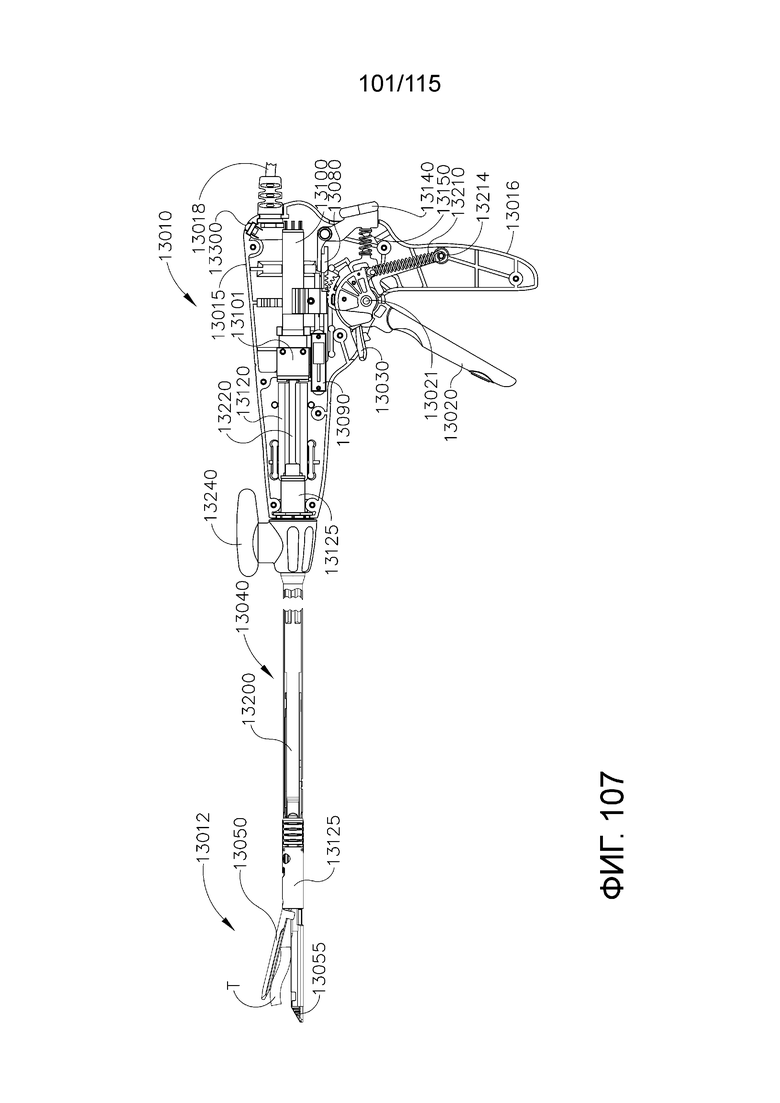
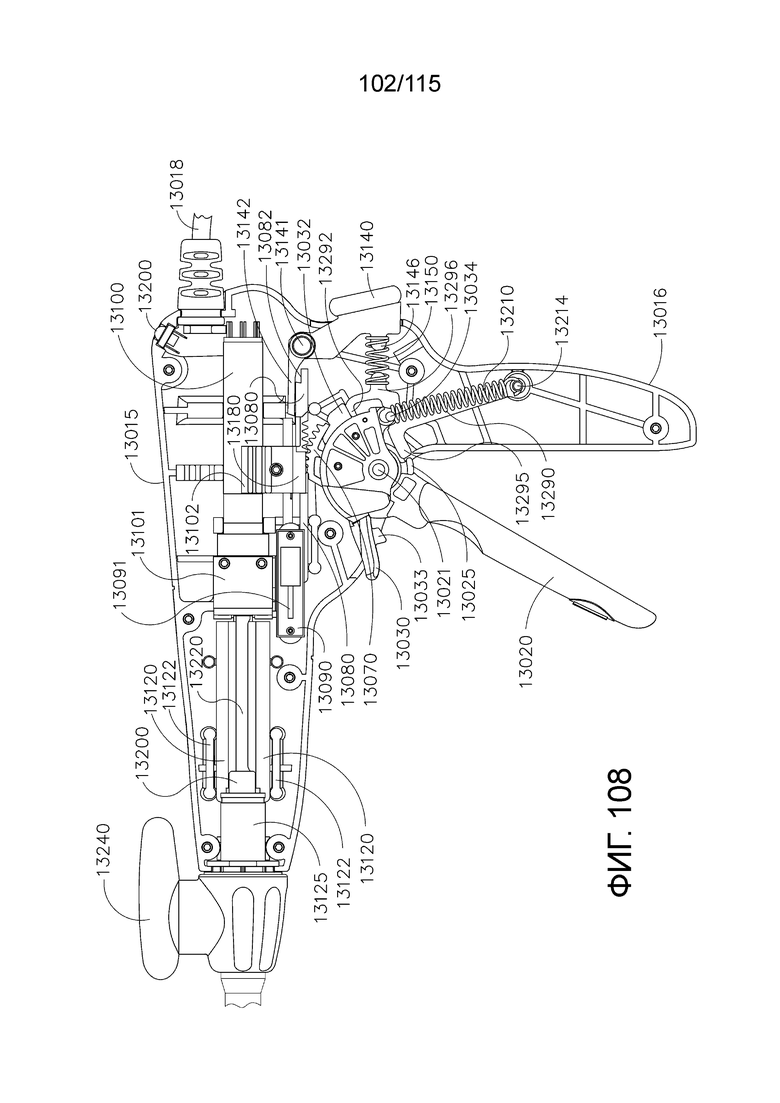
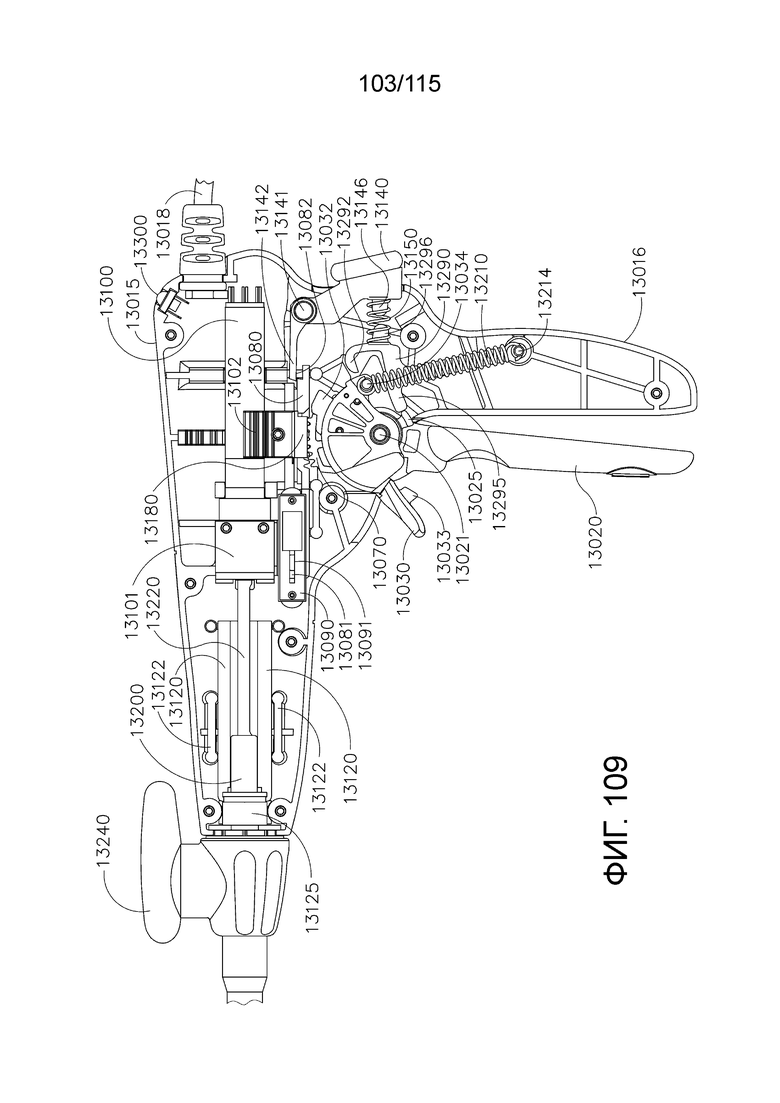
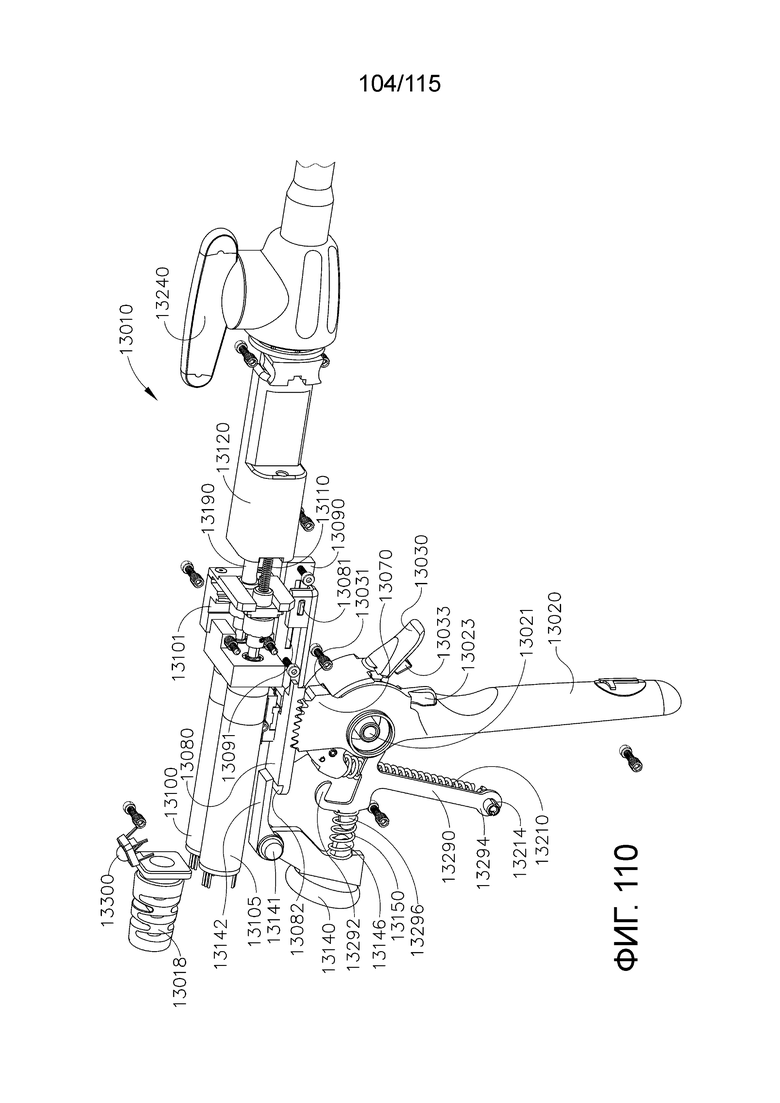
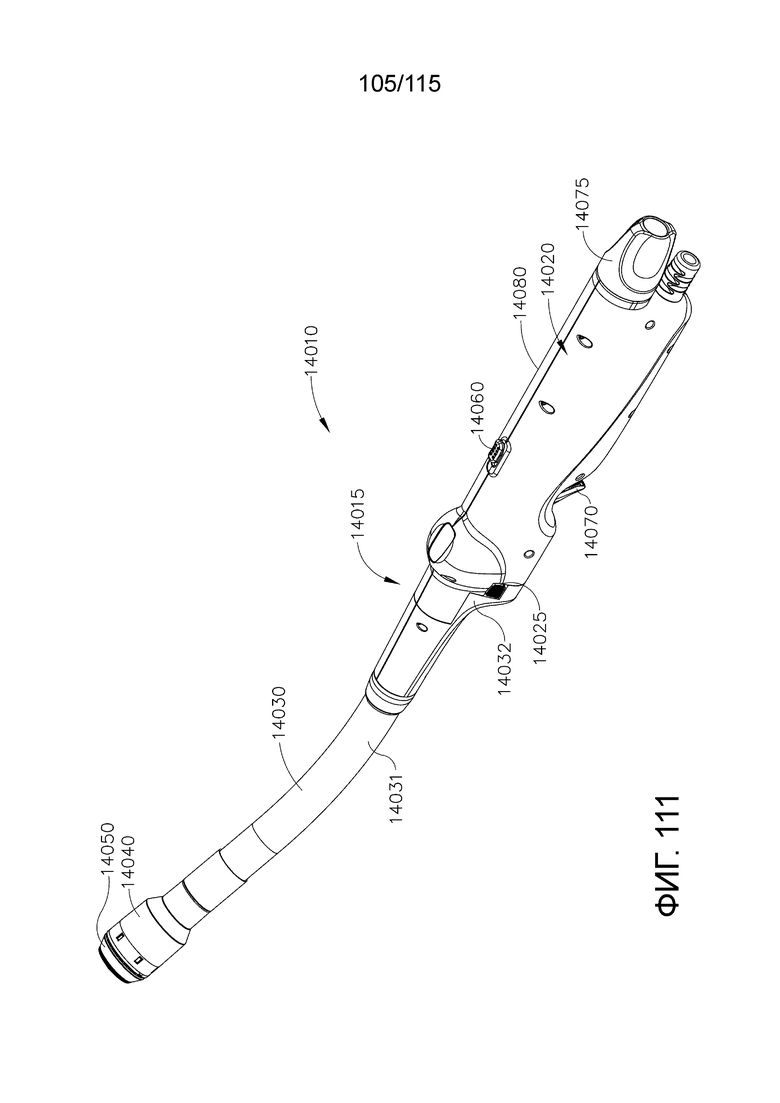
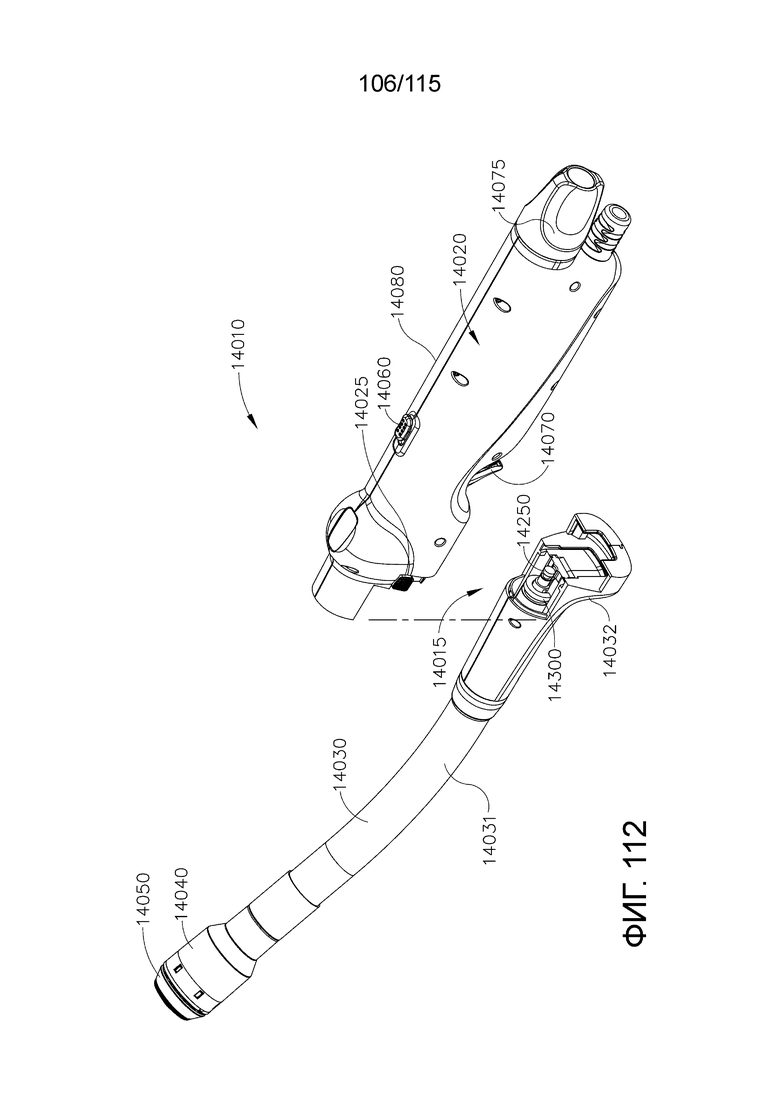
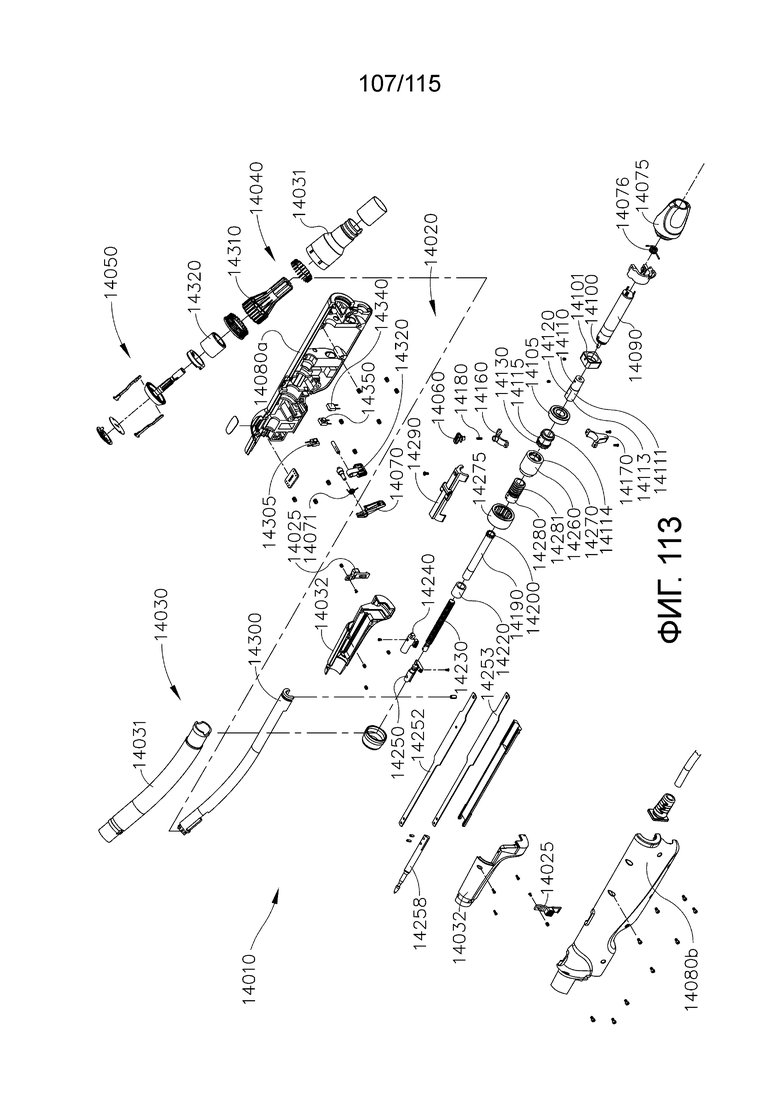
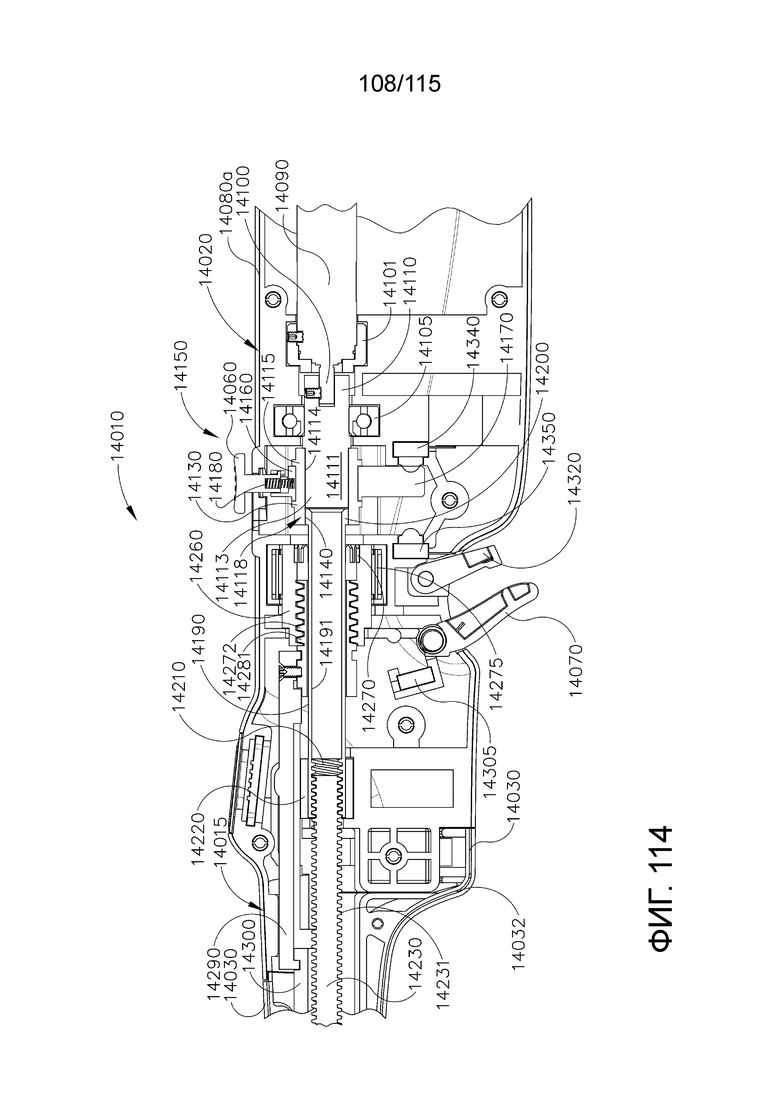
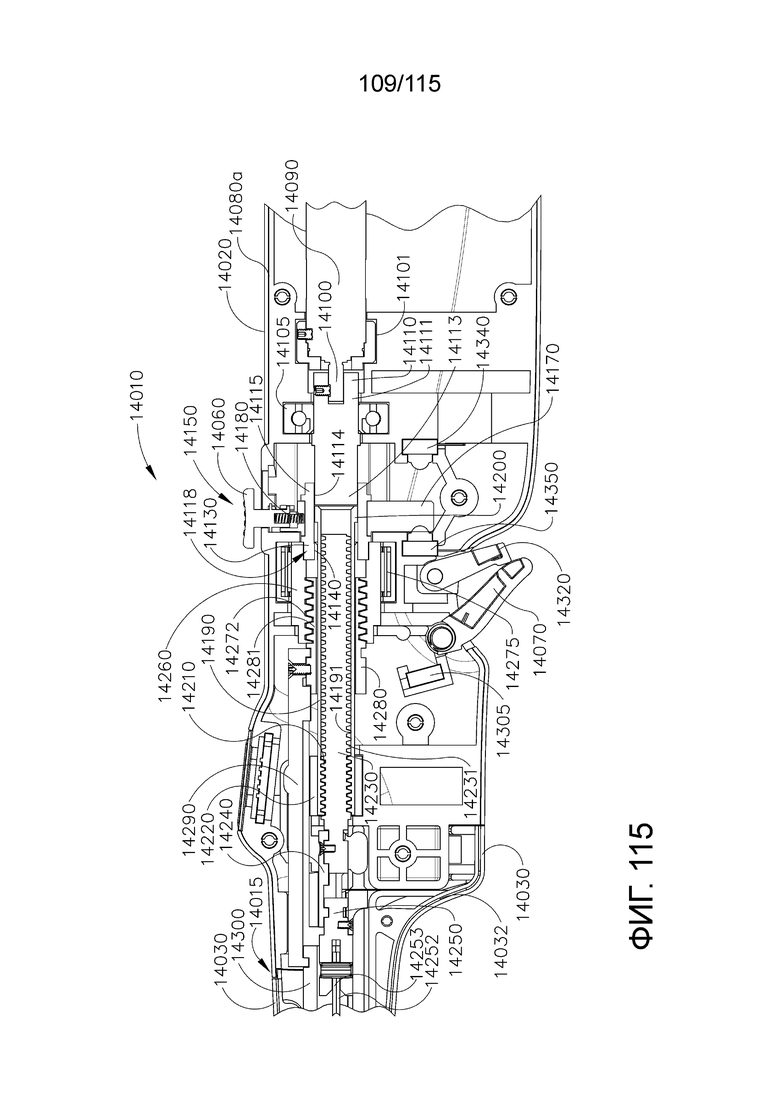
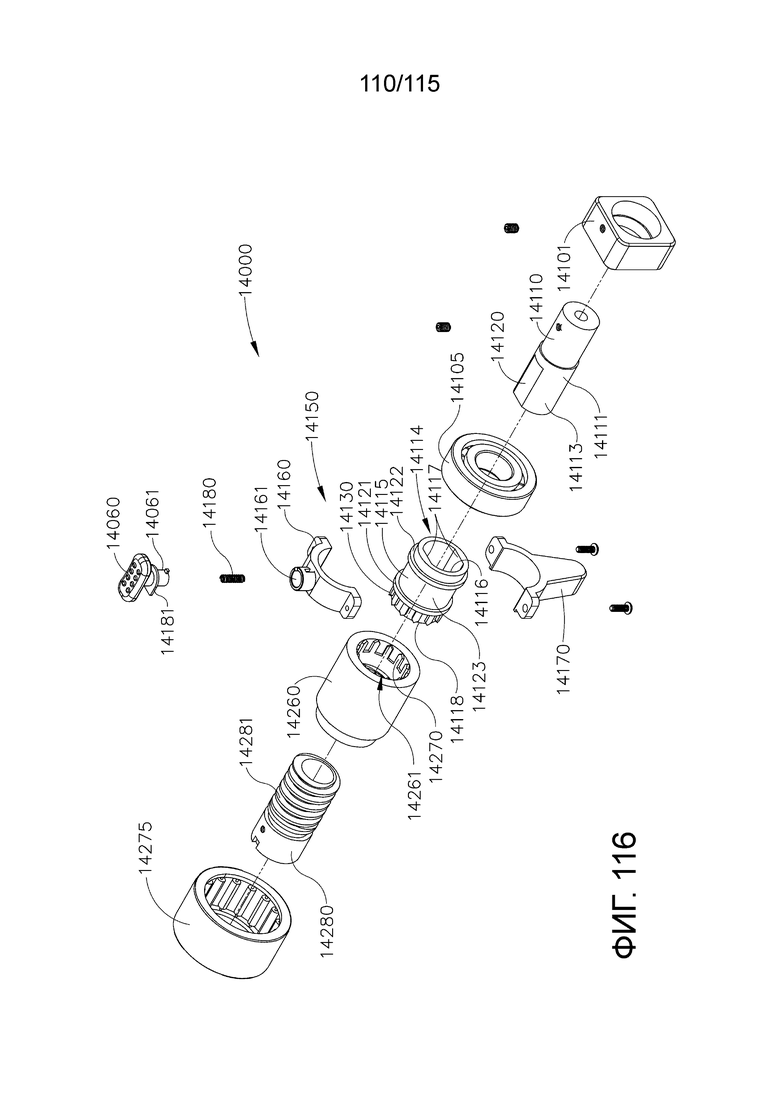
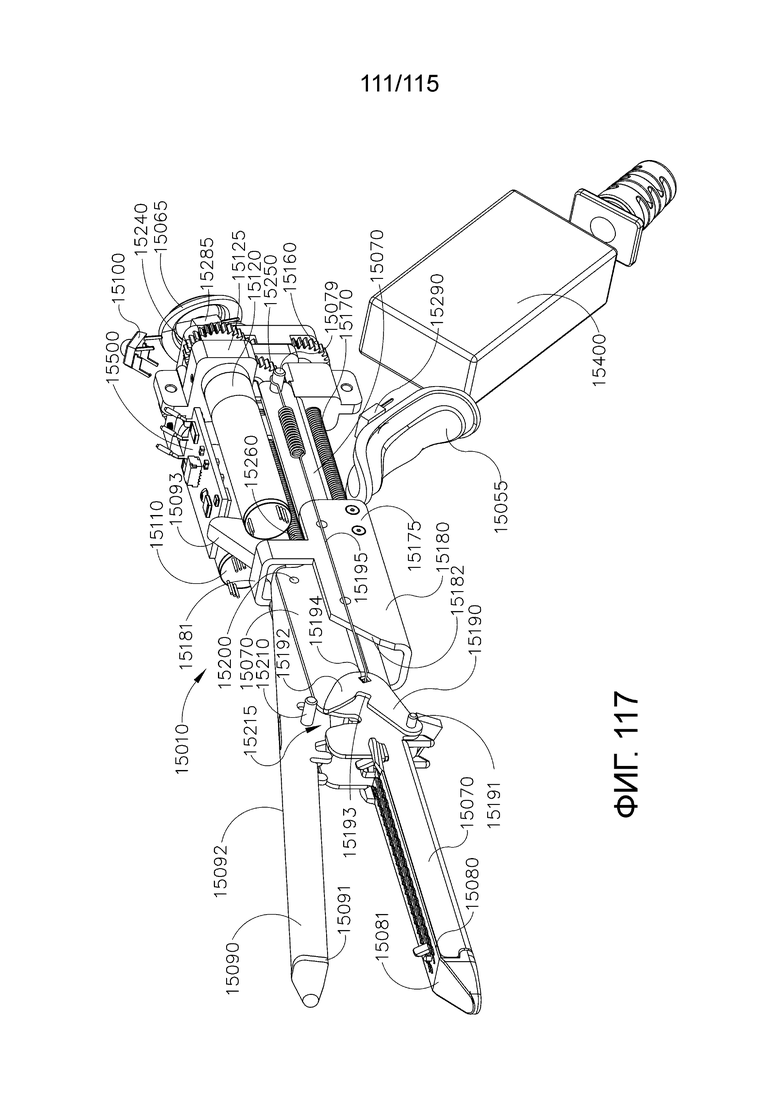
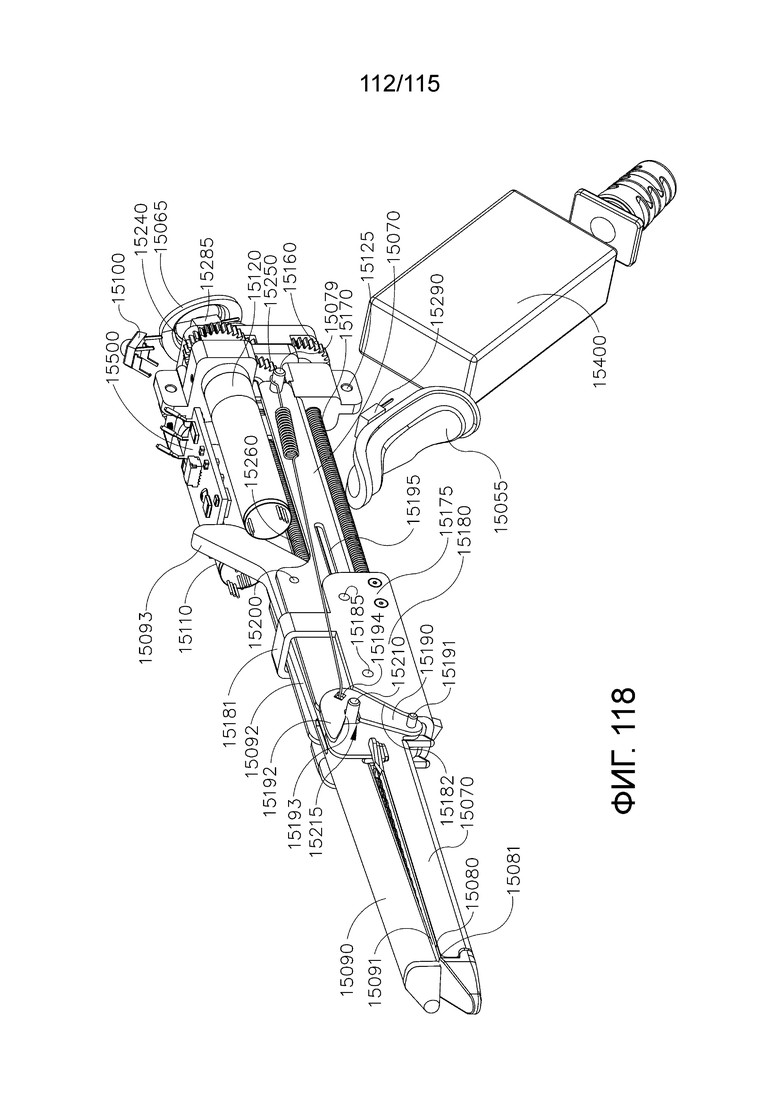
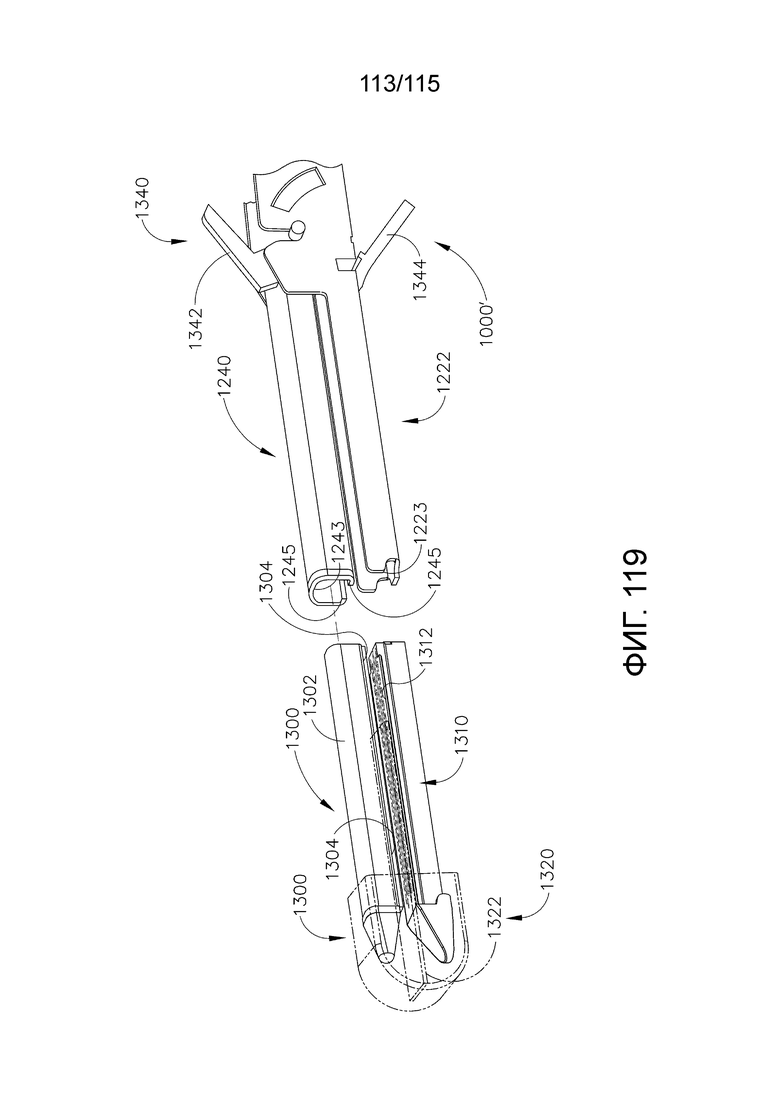
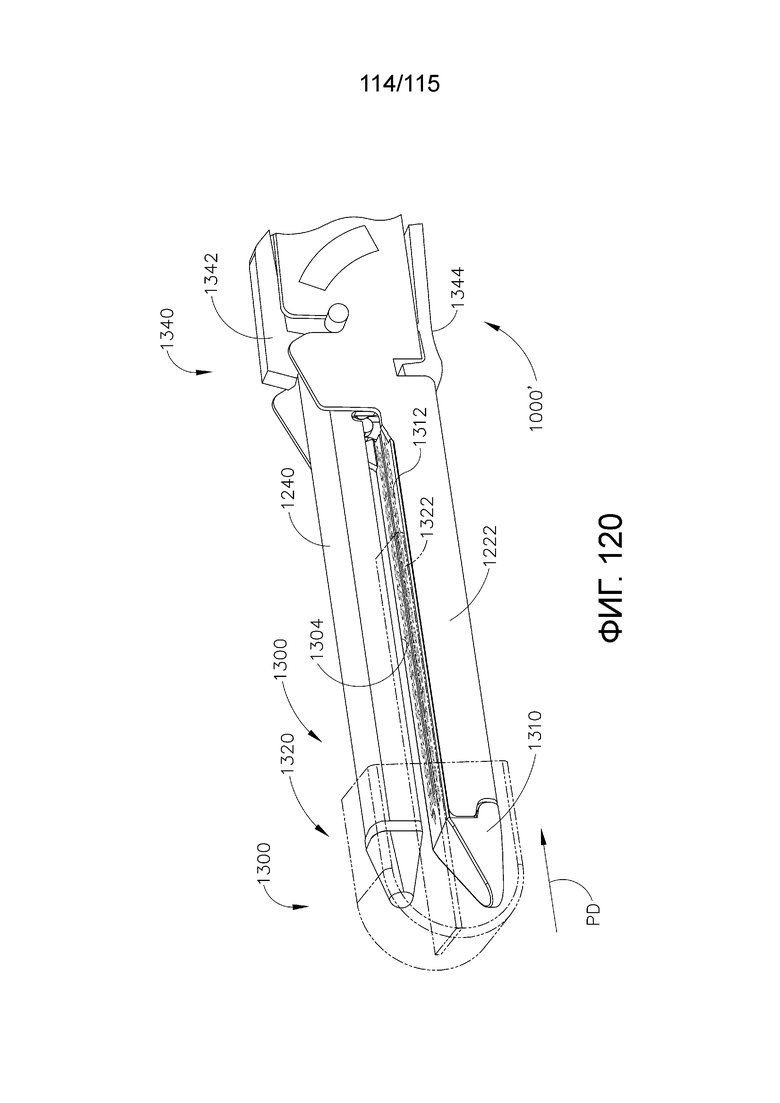
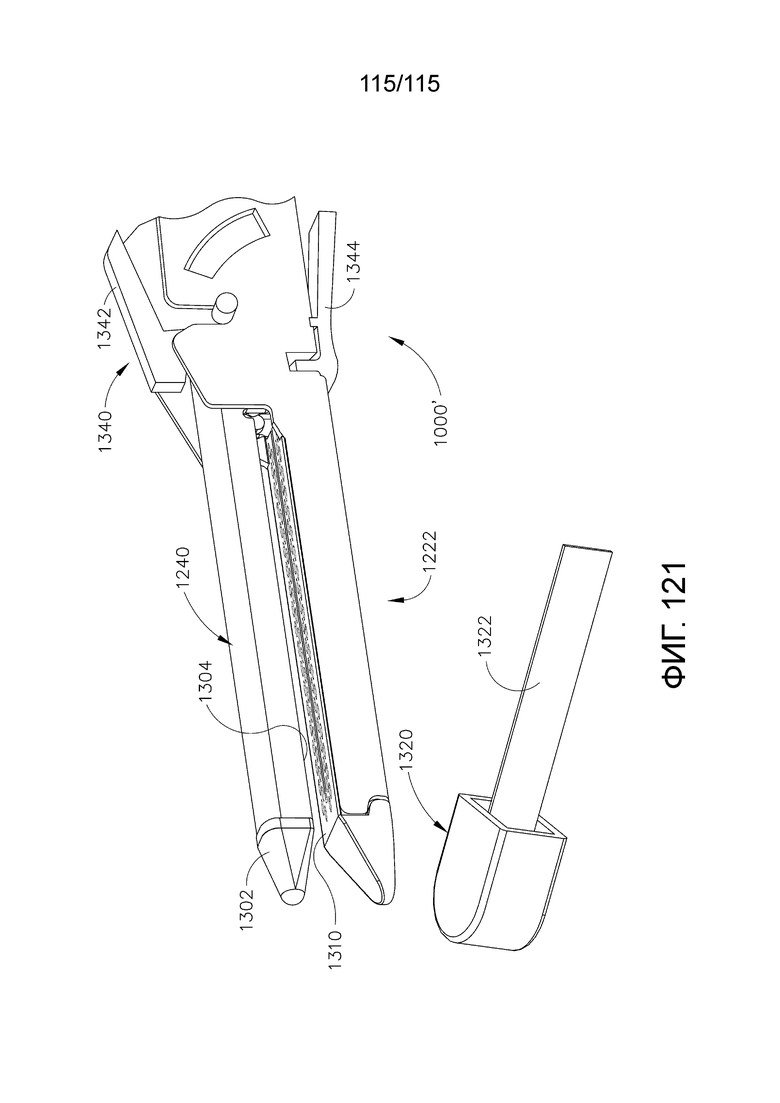
Группа изобретений относится к медицинской технике, а именно к хирургическим режущим и сшивающим инструментам и кассетам со скобками для них, которые выполнены с возможностью рассечения и сшивания ткани скобками. Хирургическая инструментальная система содержит хирургический инструмент, включающий первую поворотную приводную систему, вторую поворотную систему, по меньшей мере, один хирургический концевой эффектор и средство для одновременного разъемного и функционального соединения первого поворотного приводного вала к первому ведомому валу концевого эффектора и второго поворотного приводного вала ко второму ведомому валу концевого эффектора. Первая поворотная приводная система включает в себя первый поворотный приводной вал, включающий ось первого приводного вала. Вторая поворотная система выполнена с возможностью функционирования независимо от первой поворотной приводной системы, и включает в себя второй поворотный приводной вал, включающий в себя ось второго приводного вала, которая смещена относительно оси первого приводного вала и параллельна ей. По меньшей мере, один концевой эффектор содержит первую приводную систему концевого эффектора и вторую приводную систему концевого эффектора. Первая приводная система концевого эффектора включает первый ведомый вал концевого эффектора. Вторая приводная система концевого эффектора включает второй ведомый вал концевого эффектора. Вращение первого поворотного приводного вала вращает первый ведомый вал концевого эффектора, и вращение второго поворотного приводного вала вращает второй ведомый вал концевого эффектора. Средство для одновременного разъемного и функционального соединения первого поворотного приводного вала с первым ведомым валом концевого эффектора и второго поворотного приводного вала со вторым ведомым валом концевого эффектора содержит штырьковый соединитель на каждом из первого и второго поворотных приводных валов, гнездовой соединитель на каждом из первого и второго ведомых валах концевого эффектора, штырьковые соединители присоединены к первому и второму поворотным приводным валам. Когда первая ось приводного вала первого поворотного приводного вала соосно выравнена с первой осью ведомого вала первого ведомого вала концевого эффектора, и когда вторая ось приводного вала второго поворотного приводного вала соосно выравнена со второй осью ведомого вала второго ведомого вала концевого эффектора, штырьковые соединители первого и второго поворотных приводных валов выполнены с возможностью одновременно функционального вхождения в гнездовые соединители на первом и втором ведомых валах концевого эффектора. По меньшей мере, один штырьковой соединитель выполнен с возможностью углового перемещения на первое предварительно заданное значение углового перемещения. Механическая соединительная система для разъемного соединения сдвоенных поворотных приводных валов хирургического инструмента, причем первый поворотный приводной вал хирургического инструмента включает первую ось приводного вала, и второй поворотный приводной вал хирургического инструмента включает вторую ось приводного вала, которая смещена относительно первой оси приводного вала и параллельна ей для соответствующих сдвоенных поворотных приводных валов концевого эффектора, при этом механическая соединительная система содержит штырьковой соединитель на каждом из первого и второго поворотных приводных валов инструмента и гнездовой соединитель на каждом из сдвоенных поворотных ведомых валов концевого эффектора. Каждый штырьковой соединитель содержит штырьковую корпусную часть и, по меньшей мере, три удлиненных приводных ребра. При этом каждый гнездовой соединитель содержит гнездовую корпусную часть, соединенную с соответствующим одним из ведомых валов концевого эффектора. Во втором варианте выполнения хирургическая инструментальная система содержит хирургический инструмент, включающий первую поворотную приводную систему, вторую поворотную приводную систему, по меньшей мере, один хирургический концевой эффектор и механическую соединительную систему для разъемного и функционального соединения первого поворотного приводного вала с первым ведомым валом концевого эффектора и второго поворотного приводного вала со вторым ведомым валом концевого эффектора. По меньшей мере, один концевой эффектор содержит первую приводную систему концевого эффектора, включающую в себя первый ведомый вал концевого эффектора и вторую приводную систему концевого эффектора, включающую в себя второй ведомый вал концевого эффектора. Механическая соединительная система содержит штырьковый соединитель на каждом из первого и второго поворотных приводных валов инструмента, при этом каждый штырьковый соединитель содержит штырьковую корпусную часть и, по меньшей мере, три удлиненных приводных ребра. Каждый гнездовой соединитель содержит гнездовую корпусную часть. Использование изобретений характеризуется свободным вращением соединителей, чтобы обеспечить одновременное выравнивание и соединение нескольких приводных валов. 3 н. и 13 з.п. ф-лы, 121 ил.
1. Хирургическая инструментальная система, содержащая:
хирургический инструмент, содержащий:
первую поворотную приводную систему, включающую в себя первый поворотный приводной вал, включающий ось первого приводного вала; и
вторую поворотную систему, выполненную с возможностью функционирования независимо от первой поворотной приводной системы, и включающую в себя второй поворотный приводной вал, включающий в себя ось второго приводного вала, которая смещена относительно оси первого приводного вала и параллельна ей, и при этом хирургическая инструментальная система также содержит:
по меньшей мере, один хирургический концевой эффектор, содержащий:
первую приводную систему концевого эффектора, включающую первый ведомый вал концевого эффектора; и
вторую приводную систему концевого эффектора, включающую второй ведомый вал концевого эффектора, причем хирургическая инструментальная система также содержит:
средство для одновременного разъемного и функционального соединения первого поворотного приводного вала к первому ведомому валу концевого эффектора и второго поворотного приводного вала ко второму ведомому валу концевого эффектора, таким образом, что вращение первого поворотного приводного вала вращает первый ведомый вал концевого эффектора, и вращение второго поворотного приводного вала вращает второй ведомый вал концевого эффектора, при этом средство для одновременного разъемного и функционального соединения первого поворотного приводного вала с первым ведомым валом концевого эффектора и второго поворотного приводного вала со вторым ведомым валом концевого эффектора содержат:
штырьковый соединитель на каждом из первого и второго поворотных приводных валов; и
гнездовой соединитель на каждом из первого и второго ведомых валах концевого эффектора, таким образом, что когда первая ось приводного вала первого поворотного приводного вала соосно выравнена с первой осью ведомого вала первого ведомого вала концевого эффектора, и когда вторая ось приводного вала второго поворотного приводного вала соосно выравнена со второй осью ведомого вала второго ведомого вала концевого эффектора, штырьковые соединители первого и второго поворотных приводных валов выполнены с возможностью одновременного функционального вхождения в гнездовые соединители на первом и втором ведомых валах концевого эффектора,
штырьковые соединители присоединены к первому и второму поворотными приводным валам таким образом, что по меньшей мере один штырьковый соединитель выполнен с возможностью углового перемещения на первое предварительно заданное значение углового перемещения.
2. Система по п. 1, в которой по меньшей мере один хирургический концевой эффектор содержит:
открытый линейный сшиватель;
изогнутый режущий сшиватель; и
круглый хирургический сшиватель.
3. Система по п. 1, в которой хирургический инструмент также содержит:
кожух, функционально поддерживающий внутри первую и вторую поворотные приводные системы;
двигатель, функционально поддерживаемый кожухом; и
узел переключаемой трансмиссии, поддерживаемый кожухом и функционально взаимодействующий с двигателем и первой и второй поворотными приводными системами для избирательного приводного соединения двигателя с первой и второй поворотными приводными системами по отдельности, таким образом, что когда первая поворотная приводная система находится в приводном соединении с двигателем, вторая поворотная приводная система не находится в приводном соединении с двигателем, и когда вторая поворотная приводная система находится в приводном соединении с двигателем, первая поворотная приводная система не находится в приводном соединении с двигателем, и где каждый из по меньшей мере одного хирургического концевого эффектора содержит:
кожух концевого эффектора, выполненный с возможностью разъемного соединения с кожухом хирургического инструмента таким образом, что когда кожух концевого эффектора и кожух хирургического инструмента соединены, первый и второй приводные валы остаются функционально соединенными с первым и вторым ведомыми валами концевого эффектора соответственно, с помощью средства для одновременного разъемного и функционального соединения.
4. Система по п. 1, в которой по меньшей мере один хирургический концевой эффектор содержит:
первый компонент концевого эффектора, подвижно поддерживаемый относительно второго компонента концевого эффектора между открытой и закрытой позициями относительно друг друга с помощью первой приводной системы концевого эффектора; и
третий компонент концевого эффектора, поддерживаемый для осевого перемещения относительно по меньшей мере одного из первого и второго компонентов концевого эффектора между начальной и конечной позициями с помощью второй приводной системы концевого эффектора.
5. Система по п. 4, в которой первый компонент концевого эффектора содержит упор, при этом второй компонент концевого эффектора содержит кассету с хирургическими скобками, причем третий компонент концевого эффектора содержит поверхность для рассечения ткани.
6. Система по п. 1, в которой штырьковые соединители соединены с первым и вторым ведомыми валами концевого эффектора и гнездовые соединители соединены с первым и вторым поворотными приводными валами.
7. Система по п. 1, в которой первое предварительно заданное значение углового перемещения содержит первый диапазон предварительно заданного углового перемещения от десяти до пятнадцати градусов.
8. Система по п. 1, в которой гнездовые соединители присоединены к первому и второму ведомым валам концевого эффектора таким образом, что по меньшей мере один гнездовой соединитель выполнен с возможностью перемещения на второе предварительно заданное значение углового перемещения.
9. Система по п. 8, в которой второе предварительно заданное значение углового перемещения содержит второй диапазон предварительно заданного углового перемещения от десяти до пятнадцати градусов.
10. Система по п. 1, в которой штырьковые соединители присоединены к первому и второму поворотным приводным валам таким образом, что по меньшей мере один штырьковый соединитель выполнен с возможностью перемещения на первое предварительно заданное значение углового перемещения, и где каждый из гнездовых соединителей подсоединен к первому и второму ведомым валам концевого эффектора таким образом, что по меньшей мере один гнездовой соединитель выполнен с возможностью перемещения на второе предварительно заданное значение углового перемещения.
11. Система по п. 10, в которой первое и второе предварительно заданные значения углового перемещения равны.
12. Механическая соединительная система для разъемного соединения сдвоенных поворотных приводных валов хирургического инструмента, причем первый поворотный приводной вал хирургического инструмента включает первую ось приводного вала, и второй поворотный приводной вал хирургического инструмента включает вторую ось приводного вала, которая смещена относительно первой оси приводного вала и параллельна ей для соответствующих сдвоенных поворотных приводных валов хирургического концевого эффектора, при этом механическая соединительная система содержит:
штырьковый соединитель на каждом из первого и второго поворотных приводных валов хирургического инструмента, причем каждый штырьковый соединитель содержит:
штырьковую корпусную часть, выполненную с возможностью присоединения к соответствующему одному из первого и второго поворотных приводных валов, при этом корпусная часть включает центральную часть;
по меньшей мере, три удлиненных приводных ребра, сформированных в корпусной части и равномерно расположенных вокруг центральной части, при этом каждое удлиненное приводное ребро включает заостренный дистальный конец, и причем механическая соединительная система также содержит:
гнездовой соединитель на каждом из сдвоенных поворотных ведомых валов хирургического концевого эффектора, при этом каждый гнездовой соединитель содержит:
гнездовую корпусную часть, соединенную с соответствующим одним из ведомых валов концевого эффектора, при этом гнездовая корпусная часть включает удлиненные гнездовые желоба, сформированные на ней, причем удлиненные гнездовые желоба соответствуют по количеству и относительному расположению, по меньшей мере, трем удлиненным приводным ребрам на соответствующем одном из штырьковых соединителей, при этом каждый удлиненный гнездовой желоб включает конусовидную проксимальную входную часть для упрощения ввода в него соответствующего удлиненного приводного ребра, при этом по меньшей мере одна из штырьковых корпусных частей подвижно соединена с соответствующим одним из первого и второго поворотных приводных валов с возможностью углового перемещения в пределах первого предварительно заданного диапазона углового перемещения.
13. Механическая соединительная система по п. 12, в которой по меньшей мере одна из гнездовых корпусных частей подвижно соединена с соответствующим одним из ведомых валов концевого эффектора с возможностью углового перемещения на нем в пределах второго предварительно заданного диапазона углового перемещения.
14. Механическая соединительная система по п. 12, в которой:
каждая из штырьковых корпусных частей подвижно соединена с соответствующим одним из первого и второго поворотных приводных валов с возможностью углового перемещения на нем в пределах первого предварительно заданного диапазона углового перемещения; и
каждая из гнездовых корпусных частей подвижно соединена с соответствующим одним из ведомых валов концевого эффектора с возможностью углового перемещения на нем в пределах второго предварительно заданного диапазона углового перемещения.
15. Хирургическая инструментальная система, содержащая:
хирургический инструмент, содержащий:
первую поворотную приводную систему, включающую первый поворотный приводной вал, включающий ось первого приводного вала; и
вторую поворотную приводную систему, выполненную с возможностью независимой работы от первой поворотной приводной системы, и включающую второй поворотный приводной вал, включающий ось второго приводного вала, которая смещена относительно оси первого приводного вала и параллельна ей, и при этом система также содержит:
по меньшей мере, один хирургический концевой эффектор, содержащий:
первую приводную систему концевого эффектора, включающую в себя первый ведомый вал концевого эффектора; и
вторую приводную систему концевого эффектора, включающую в себя второй ведомый вал концевого эффектора, причем хирургическая инструментальная система также содержит:
механическую соединительную систему для разъемного и функционального соединения первого поворотного приводного вала с первым ведомым валом концевого эффектора и второго поворотного приводного вала со вторым ведомым валом концевого эффектора, причем механическая соединительная система содержит:
штырьковый соединитель на каждом из первого и второго поворотных приводных валов хирургического инструмента, при этом каждый штырьковый соединитель содержит:
штырьковую корпусную часть, присоединяемую к соответствующему одному из первого и второго поворотных приводных валов, при этом корпусная часть включает центральную часть;
по меньшей мере, три удлиненных приводных ребра, сформированных в корпусной части и равномерно расположенных вокруг центральной части, причем каждое удлиненное приводное ребро включает заостренный дистальный конец, и при этом механическая соединительная система также содержит:
гнездовой соединитель на каждом из первого и второго ведомых валов хирургического концевого эффектора, при этом каждый гнездовой соединитель содержит:
гнездовую корпусную часть, соединенную с соответствующим одним из ведомых валов концевого эффектора, при этом гнездовая корпусная часть включает удлиненные гнездовые желоба, сформированные на ней, при этом удлиненные гнездовые желоба соответствуют по количеству и относительному расположению, по меньшей мере, трем удлиненным приводным ребрам на соответствующем штырьковом соединителе, и при этом каждый удлиненный гнездовой желоб включает конусовидную проксимальную входную часть для упрощения ввода в него соответствующего удлиненного приводного ребра, при этом каждая из штырьковых корпусных частей подвижно соединена с соответствующим одним из первого и второго поворотных приводных валов с возможностью углового перемещения в пределах первого предварительно заданного диапазона углового перемещения; и
каждая из гнездовых корпусных частей подвижно соединена с соответствующим одним из ведомых валов концевого эффектора с возможностью углового перемещения в пределах второго предварительно заданного диапазона углового перемещения.
16. Система по п. 15, в которой штырьковые соединители соединены с первым и вторым ведомыми валами концевого эффектора, а гнездовые соединители соединены с первым и вторым воротными приводными валами.
| US 2011174099 А1, 21.07.2011 | |||
| ХИРУРГИЧЕСКИЙ СШИВАТЕЛЬ | 1999 |
|
RU2161450C1 |
| Расходомер | 1991 |
|
SU1813201A3 |
| US 2012298719 A1, 29.11.2012. | |||

