Изобретение относится к области вычислительной техники и может использоваться в системах сбора, обработки и передачи информации, устройствах телеметрии, связи и управления.
Известно устройство, содержащее блок памяти, выполненный в виде трехразрядного аналогового регистра сдвига, и блок формирования экстраполирующей функции, выполненный на основе двух интегрирующих и суммирующего усилителей (Авторское свидетельство СССР по заявке №2961521/18-24, кл. G06F 7/30, 1980).
Недостатком этого устройства является низкая точность, ограниченные функциональные возможности и ограниченный диапазон экстраполяции, поскольку оно служит лишь для восстановления аналогового сигнала внутри интервала дискретизации по запомненным значениям, т.е. для получения огибающей импульсного сигнала.
Наиболее близким по технической сущности к заявляемому изобретению является устройство автоматического прогнозирования технического состояния систем, содержащее сумматор, регистр хранения-сдвига, блок определения степени полинома, схему подключения конечных разностей, блоки умножения, схему временных коэффициентов Ньютона, элемент задержки, шину задания временной точки, на которую необходимо осуществить прогноз технического состояния систем, причем вход сумматора соединен с выходом блоков умножения и выходом элемента задержки, вход которого соединен с последней ячейкой регистра сдвига-хранения, выходы которого являются входами блока определения степени полинома, второй выход которого является первым входом схемы временных коэффициентов Ньютона и вторым входом схемы подключения конечных разностей, первые входы которой соединены с выходами блока определения степени полинома, а выходы схемы подключения конечных разностей являются первыми входами блоков умножения, второй вход которых соединен с выходами схемы временных коэффициентов Ньютона, второй вход которой соединен с шиной задания временной точки прогнозирования (Петриченко Г.С., Тартачный С.Н. Устройство автоматического прогнозирования технического состояния систем по заявке №92011675/09, кл. G05B 23/02, 1996 - прототип).
Недостатком данного устройства является то, что оно не позволяет бороться со случайной ошибкой прогноза, возникающей за счет ошибки измерения, которая резко увеличивается с увеличением степени аппроксимирующего полинома и времени прогноза.
Техническим результатом изобретения является расширение функциональных возможностей устройства и повышение точности прогнозирования.
Требуемый технический результат достигается тем, что в устройство прогнозирования, содержащее последовательно соединенные блок ввода исходных данных - регистр хранения-сдвига, блок определения степени полинома, схему подключения конечных разностей, блоки умножения, схему временных коэффициентов Ньютона, элемент задержки, шину задания временной точки, на которую необходимо осуществить прогноз технического состояния системы, введены блок управления, вычислительный блок, предназначенный для расчета прогноза сигнала по выбранной модели, блок памяти, блок анализа и коррекции, предназначенный для вычисления и коррекции полной ошибки прогноза по заданному алгоритму, блок индикации результатов прогноза, входом подключенный к первому выходу блока анализа и коррекции, второй выход которого подключен к первому дополнительному входу блока определения степени полинома, второй дополнительный вход которого подключен к первому управляющему выходу блока управления, вторым управляющим выходом подключенный к дополнительному входу блока хранения-сдвига, третий управляющий выход блока управления подключен к шине задания временной точки прогнозирования, а четвертый управляющий выход блока управления подключен ко второму дополнительному входу вычислительного блока, причем входы вычислительного блока соединены с выходами блоков умножения, а его первый дополнительный вход соединен с выходом элемента задержки, выход вычислительного блока подключен к входу блока памяти, выход которого является входом блока анализа и коррекции.
Повышение точности прогнозирования достигается за счет вычисления полной ошибки прогноза, которая определяется по следующему выражению:
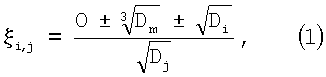
где О - постоянная составляющая ошибки измерений ошибки прогноза;
Dm - дисперсия ошибки измерения, величина постоянная, зависящая от числа измерений и шагов прогноза;
Di - дисперсия ошибки прогноза при i-й модели прогнозирования, может быть вычислена для заданного числа измерений и числа шагов прогноза;
Dj - дисперсия ошибки прогноза при j-й модели прогнозирования, имеет также постоянное значение при заданном числе измерений и шагов прогноза.
Постоянная ошибка прогноза О определяется по формуле
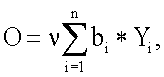
где О - постоянная составляющая ошибки измерений ошибки прогноза;
ν - коэффициент смещения;
bi - весовой коэффициент, имеющий постоянное значение и зависящий от числа измерений и шагов прогноза;
Yi - измеренные значения параметра.
На основании полученных значений полной ошибки прогноза осуществляются выбор и определение степени полинома аппроксимирующего выражения, а также вычисление прогнозируемого значения параметра.
Предварительная оценка ошибки прогноза перед вычислением прогнозируемого значения параметра позволяет скорректировать при прогнозировании постоянную и полную ошибки прогноза, повысить точность прогноза и расширить функциональные возможности устройства в целом.
Таким образом, совокупность существенных признаков, изложенных в формуле изобретения, позволяет достичь желаемого технического результата.
Структурная схема устройства прогнозирования изображена на чертеже, где обозначено: регистр хранения - сдвига 1, блок определения степени полинома 2, схема подключения конечных разностей 3, блоки умножения 41-4n, схема временных коэффициентов Ньютона 5, вычислительный блок 6, элемент задержки 7, шина задания временной точки 8, на которую необходимо осуществить прогноз технического состояния системы, блок управления 9, блок памяти 10, блок анализа и коррекции ошибок 11, блок индикации 12.
Устройство прогнозирования технического состояния системы работает следующим образом.
В регистр 1 записываются n узловых значений дискретного сигнала y0-yn по сигналу со второго управляющего выхода блока управления 9. Затем эти значения по сигналу с первого управляющего выхода блока управления 9 переписываются в блок 2 определения степени полинома. В блоке 2 степень полинома определяется на основе применения метода конечных разностей.
Конечные разности определяются следующим образом:



…
…

После определения степени полинома подается сигнал со второго дополнительного выхода блока 2 определения степени полинома на схему 5 временных коэффициентов Ньютона для подключения необходимого количества коэффициентов xn и на схему подключения конечных разностей 3 для подключения необходимого количества значений разностей Δkyn.
Одновременно с подачей сигнала, определяющего значение степени полинома, на схему 5 временных коэффициентов Ньютона по сигналу с третьего управляющего выхода блока управления 9 по шине 8 подается временная точка прогноза h1. Если, к примеру, степень полинома соответствует двум, тогда происходит подключение последних двух значений конечных разностей Δyn-1 и Δ2yn-2, которые одновременно с временными коэффициентами Ньютона х1 и х2 подаются на блоки умножения 4n и 4n-1.
Временные коэффициенты Ньютона определяются заранее по алгоритму, соответствующему следующей обобщенной формуле:
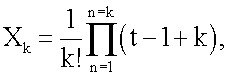
где 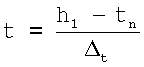 - число шагов прогнозирования;
- число шагов прогнозирования;
Δt - интервал измерения дискретных значений сигнала;
k - степень полинома;
h1 - временная точка, на которую необходимо получить значение;
tn - момент времени прогнозирования.
Временные коэффициенты Ньютона Хk записываются и хранятся в блоке 5. Затем результат умножения конечных разностей с временными коэффициентами Ньютона с блока умножения одновременно с последним значением yn, задержанным элементом задержки 7 на интервал Δt (времени определения степени полинома и результатов выполнения операций перемножения), подаются на вход вычислительного блока 6, на выходе которого формируется сигнал, определяющий прогнозируемое значение технического состояния системы с использованием экстраполирующей формулы Ньютона:

где x1, х2, …, х3 - временные коэффициенты Ньютона;
y0, y1, …, yn - дискретные значения сигнала, полученные в определенные моменты времени контроля;
Δyn-1, Δ2yn-2, …, Δny0 - конечные разности.
Прогнозируемое значение технического состояния системы с выхода вычислительного блока 6 по сигналу с четвертого управляющего выхода блока управления 9 записывается в блок памяти 10.
Блок 11 анализа и коррекции производит вычисление и коррекцию полной ошибки прогноза ξi,j по выражению (1). В данном блоке происходит анализ величины и знака ошибки, и в соответствии с этим осуществляется выбор модели прогнозирования, т.е. степени полинома в блоке 2 определения степени полинома.
Если  то блок управления 9 выдает сигнал в блок 2 на прогнозирование по i-му полиному.
то блок управления 9 выдает сигнал в блок 2 на прогнозирование по i-му полиному.
Если  то блок управления 9 выдает сигнал в блок 2 на прогнозирование по j-му полиному.
то блок управления 9 выдает сигнал в блок 2 на прогнозирование по j-му полиному.
На основании данных блока анализа и коррекции 11 вычислительный блок 6 рассчитывает прогнозируемое значение параметра на заданное число шагов по уточненной модели прогнозирования, определяемой блоком 2 определения степени полинома согласно выражению (2), по сигналу блока управления 9. Расчеты прогнозируемого значения производятся на основании той же серии измерений параметра, что и коррекция модели. Результаты прогноза поступают на блок индикации 12.
Таким образом, оценка ошибки прогноза позволяет выбрать необходимую степень аппроксимирующего выражения, произвести уточненный расчет прогнозирующего значения технического состояния системы, тем самым повысить точность прогнозирования и достичь требуемого технического результата.
Реализовать данное устройство прогнозирования технического состояния систем возможно на базе программируемого микропроцессорного контроллера ATmega 128 (фирмы Atmel, США).
Предлагаемое устройство прогнозирования в системах контроля и управления позволит уменьшить полную ошибку прогноза измеряемого параметра по сравнению с известным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДСКАЗАНИЯ СОСТОЯНИЯ ТЕХНИЧЕСКОЙ СИСТЕМЫ ПРИ ПОМОЩИ АППРОКСИМАЦИИ ЕЕ ПАРАМЕТРОВ К НЕПРЕРЫВНОЙ ФУНКЦИИ | 2017 |
|
RU2681404C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2008 |
|
RU2374682C2 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2446461C2 |
| Автоматизированная адаптивная система управления рудновосстановительной электропечи | 1989 |
|
SU1806448A3 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2622851C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ СГЛАЖИВАЮЩЕЕ И ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2622852C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2629641C1 |
| Устройство прогнозирования | 1979 |
|
SU834676A1 |
| АДАПТИВНОЕ ЦИФРОВОЕ СГЛАЖИВАЮЩЕЕ И ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2626338C1 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2017 |
|
RU2680215C1 |
Изобретение относится к области вычислительной техники и может использоваться в системах сбора, обработки и передачи информации. Технический результат заключается в расширении функциональных возможностей устройства за счет координированного управления и в повышении точности устройства за счет учета полной ошибки прогноза. Он достигается тем, что устройство прогнозирования технического состояния систем содержит регистр хранения-сдвига, блок определения степени полинома, схему подключения конечных разностей, блоки умножения, схему временных коэффициентов Ньютона, элемент задержки, шину задания временной точки, блок управления, вычислительный блок, предназначенный для расчета прогноза сигнала по выбранной модели, блок памяти, блок анализа и коррекции, предназначенный для вычисления и коррекции полной ошибки прогноза по заданному алгоритму, блок индикации результатов прогноза. 1 ил.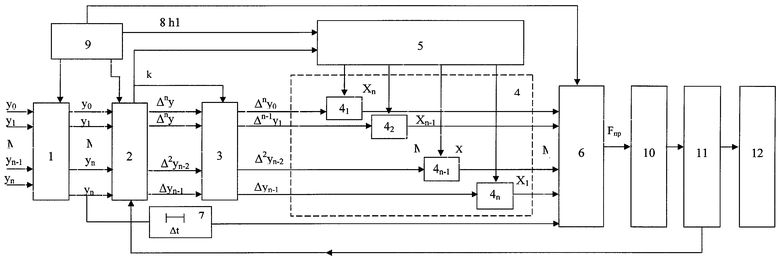
Устройство прогнозирования технического состояния систем, содержащее регистр хранения-сдвига, блок определения степени полинома, схему подключения конечных разностей, блоки умножения, схему временных коэффициентов Ньютона, элемент задержки, шину задания временной точки, на которую необходимо осуществить прогноз технического состояния системы, причем вход элемента задержки соединен с последней ячейкой регистра хранения-сдвига, выходы которого являются входами блока определения степени полинома, второй выход которого является первым входом схемы временных коэффициентов Ньютона и вторым входом схемы подключения конечных разностей, первые входы которой соединены с первыми выходами блока определения степени полинома, а выходы схемы подключения конечных разностей являются первыми входами блоков умножения, второй вход которых соединен с выходами схемы временных коэффициентов Ньютона, второй вход которой соединен с шиной задания временной точки прогнозирования, отличающееся тем, что в него введены блок управления, вычислительный блок, предназначенный для расчета прогноза сигнала по выбранной модели, блок памяти, блок анализа и коррекции, предназначенный для вычисления и коррекции полной ошибки прогноза по заданному алгоритму, блок индикации результатов прогноза, входом подключенный к первому выходу блока анализа и коррекции, второй выход которого подключен к первому дополнительному входу блока определения степени полинома, второй дополнительный вход которого подключен к первому управляющему выходу блока управления, вторым управляющим выходом подключенный к дополнительному входу блока хранения-сдвига, третий управляющий выход блока управления подключен к шине задания временной точки прогнозирования, а четвертый управляющий выход блока управления подключен ко второму дополнительному входу вычислительного блока, причем входы вычислительного блока соединены с выходами блоков умножения, а его первый дополнительный вход соединен с выходом элемента задержки, выход вычислительного блока подключен к входу блока памяти, выход которого является входом блока анализа и коррекции.
| RU 92011675 А, 20.11.1996 | |||
| Устройство для прогнозирования состояния систем управления | 1976 |
|
SU590699A1 |
| СИСТЕМА КОНТРОЛЯ ДЛЯ ТЕХНИЧЕСКОЙ УСТАНОВКИ | 1995 |
|
RU2160921C2 |
| WO 2006107952 A1, 12.10.2006. | |||

