(54) УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СИСТЕМ | 2009 |
|
RU2409827C2 |
| Устройство для регулирования выдачи топлива | 1982 |
|
SU1043716A1 |
| Адаптивный экстраполятор | 1982 |
|
SU1042031A1 |
| АДАПТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ПРОЦЕССА КОНТРОЛЯ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 1990 |
|
RU2042168C1 |
| Устройство прогнозирования работоспособности радиоэлектронной аппаратуры | 1984 |
|
SU1264116A1 |
| Адаптивный экстраполятор | 1980 |
|
SU881765A1 |
| Многоскоростной цифровой экстраполятор | 2018 |
|
RU2684190C1 |
| Устройство прогнозирования работоспособности радиоэлектронной аппаратуры | 1987 |
|
SU1422196A2 |
| СПОСОБ НЕЙРОСЕТЕВОГО ПРОГНОЗИРОВАНИЯ ИЗМЕНЕНИЯ ЗНАЧЕНИЙ ФУНКЦИИ С ЕЁ ПРЕДВАРИТЕЛЬНОЙ ВЕЙВЛЕТ-ОБРАБОТКОЙ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2600099C1 |
| Адаптивный прогнозатор производственных показателей | 1989 |
|
SU1658175A1 |
I
Изобретение относится к системам контроля и управления и предназначено для прогнозирования значения контролируемых параметров по данным серии периодических измерений, в частности, в системах контроля средств обеспечения полетов гражданской авиации.
Известны устройства прогнозирования экстраполирующего типа, работающие на основе двух методов: аналитического экстраполирования и экстраполирования по методу наименьших квадратов. Первый метод основан на использовании для прогноза функции, проходящей через измеренные значения. При этом возможно использование в экстраполяторах устройств, автоматически подбирающих вид функции прогноза, наиболее близкой к реальной функции изменения измеряемого параметра во временщ и обеспечивающей минимум постоянной составляющей ощибки прогноза.
Однако этот метод не позволяет бороться со случайной ощибкой прогноза, возникающей за счет ощибки измерения.
Второй метод, основан на использовании для прогноза функции, полученной с помощью обработки измеренных значений по
методу наименьших квадратов. При этогу; случайная ошибка прогноза существенно уменьщается по сравнению с аналитическим методом прогноза.
Известен экстраполятор, в основу кото рого положен первый метод. Экстраполятор предназначен для использования в системах автоматического управления и содержит последовательно соединенные квантователь входного сигнала, блок текущего среднего, вычислительный блок, блок выработки шага квантования, блок вычисления экстраполируемой функции, блок ошибки, а также блок определения степени приближаюшего полинома, вход которого соединен с выходом блока ошибки, а его первый выход - с квантователем, второй выход - с вычислительSным блоком. Кроме того, выход блока текущего среднего соединен со вторым входом вычисления экстраполируемой функции и блока ошибки 1.
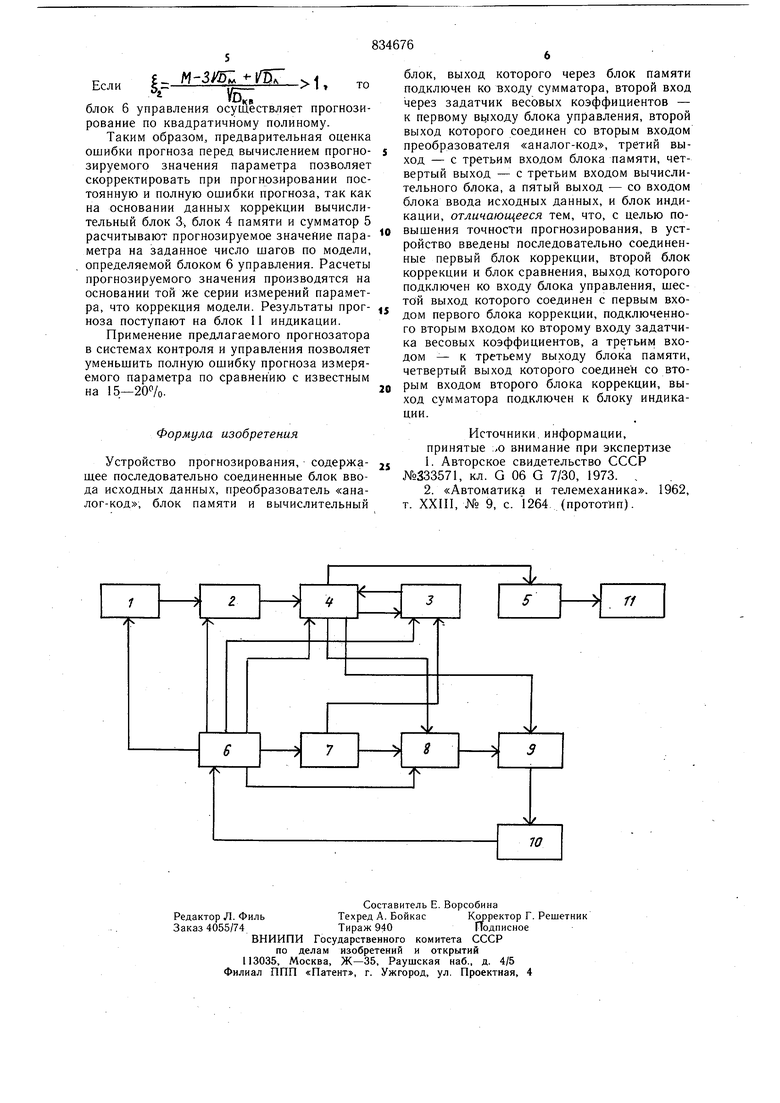
С.ушественным недостатком этого устройства является наличие случайной сос0тавляющей ошибки прогноза, обусловленной ошибками измерения, которая резко увеличивается с увеличением степени аппроксимирующего полинома и времени прогноза: Наиболее близким к предлагаемому является экстраполятор, работающий по методу наименьших квадратов. Оп содержит последовательпо соединеппые блок ввода исходных данных, блок преобразования, вычислительный блок, блок памяти и сумматор, а также блок управления, первый выход которого соединен с входом блока ввода исходных данных, второй выход - с вторым входом блока преобразования, третий выход - со вторым входом вычислительного блока, четвертый выход - со вторым входом блока памяти, блок весовых коэффициентов, вход которого соединен с пятым выходом блока управления, а выход - с третьим входом вычислительного блока. Экстраполятор работает по закономерности xi. Д Y ирОгнозируемое значение параметра; х - измеренное i-oe значение пара.метра; п - число измерепий; Ai - постоянный коэффициент, зависящий от степени аппроксимирующего полинома, числа измерений п, метода экстраполяции, номера щага прогноза 2. Данный экстраполятор не обеспечивает миниму.м полной ошибки прогноза, так как в устройстве не предусмотрена компенсация постоянной составляющей ощибки прогноза. Цель изобретепия - уменьшение полной оп1ибки трогноза за счет коррекции ее случайной составляющей и рационального выбора аппроксимирующего выражения либо первой, либо второй степени. Поставленная цель достигается тем, что в устройство прогнозирования, содержащее последовательно соединенные блок ввода исходных данных, преобразователь «аналогкод, блок па.мяти, вычислительнь й блок, выход которого через блок памяти подключен ко входу сумматора, второй вход через задатчик весовых коэффициентов - к первому выходу блока управления, второй выход которого соединен со вторым входом преобразователя «аналог-код, третий выход - с третьим входом блока памяти, четвертый выход - с третьим входом вычислительного, блока, а пятый выход -.со входом блока ввода исходных данных, и блок индикации, введены последовательно соединенные первый блок коррекции, второй блок коррекции и блок сравнения, выход которого подключен ко входу блока управления, щестой выход которого соединен с первым входом первого блока коррекции, подключенного вторым в.чодом ко второму входу заДатчика весовых коэффициентов, а третьим входом - к третьему выходу блока памяти, четвертый выход которого соединен со вторым входом второго блока коррекции, выход сумматора подключен к блоку индикации. Предлагаемое устройство позволяет па основе уже измеренных значений параметра сократить полную ошибку прогноза путем рационального вь1бора аппроксимирующего многочлена. Для этого производится оценполной ощибки прогноза как для многона 1-ой степени, так и, для многочлена й степени, и из них выбирается тот, коому соответствует минимальная ошибка. На чертеже представлена блок-схема ройства. Устройство содержит блок 1 ввода исных данных, преобразователь 2 «ана-код, вычислительный блок 3, блок 4 яти, сумматор 5, блок 6 управления, зачик 7 весовых коэффициентов, первый к 8 коррекции, второй блок 9 коррек, блок 10 сравнения, блок 11 индикации. Устройство прогнозирования работает дующим образом. По сигналу блока 6 управления значеизмеренного параметра подаются с поью блока 1 в преобразователь 2 и дана блок 8 коррекции, на второй вход орого из задатчика 7 поступают весовые ффициенты, которые являются постояни для заданного числа измерений и шапрогноза. В блоке 8 коррекции произвося определение ее величины и коррекция формуле , «.у. , М - постоянная составляющая полной ощибки прогноза; Ь - весовой коэффициент, имеющий пос тоянное значение и зависящий от числа измерений и шагов прогноза; Y- - измеренное значение параметра; - коэффициент смещения. Блок 9 коррекции производит вычисление коррекцию полной ощибки прогноза | i,i следующему вьЧражению f - у Dfl - дисперсия ошибки прогноза при линейной модели прогнозирования, имеет постоянный характер и может быть вычислена для заданного числа измерений и числа шагов прогноза; -дисперсия ошибки прогноза при квадратичной модели прогнозирования, имеет также постоянное значение при заданном числе измерений и шагов прогноза; Df, - дисперсия ощибки измерения, величина постоянная, зависящая от числа измерений и шагов прогноза;М - постоянная составляющая ошибки .измерения. Блок 10 сравнения анализирует величии знак ошибки. I±lK±vlL блок 6 управления выдается сигнал на гнозирование по линейному закону. Ь 1, .0 IK блок 6 управления осуществляет прогнозирование по квадратичному полиному. Таким образом, предварительная оценка ошибки прогноза перед вычислением прогнозируемого значения параметра позволяет скорректировать при прогнозировании постоянную и полную ошибки прогноза, так как на основании данных коррекции вычислительный блок 3, блок 4 памяти и сумматор 5 расчитывают прогнозируемое значение параметра на заданное число шагов по модели, определяемой блоком 6 управления. Расчеты прогнозируемого значения производятся на основании той же серии измерений параметра, что коррекция модели. Результаты прогноза поступают на блок 11 индикации. Применение предлагаемого прогнозатора в системах контроля и управления позволяет уменьшить полную ошибку прогноза измеряемого параметра по сравнению с известным на 15-20%. Формула изобретения Устройство прогнозирования, содержащее последовательно соединенные блок ввода исходных данных, преобразователь «аналог-код, блок памяти и вычислительный блок, выход которого через блок памяти подключен ко входу сумматора, второй вход через задатчик весовых коэффициентов - к первому вь1ходу блока управления, второй выход которого соединен со вторым входом преобразователя «аналог-код, третий выход - с третьим входом блока памяти, четвертый выход - с третьим входом вычислительного блока, а пятый выход - со входом блока ввода исходных данных, и блок индикации, отличающееся тем, что, с целью повышения точности прогнозирования, в устройство введены последовательно соединенные первый блок коррекции, второй блок коррекции и блок сравнения, выход которого подключен ко входу блока управления, шестой выход которого соединен с первым входом первого блока коррекции, подключенного вторым входом ко второму входу задатчика весовых коэффициентов, а третьим входом - к третьему выходу блока памяти, четвертый выход которого соединен со вторым входом второго блока коррекции, выход сумматора подключен к блоку индикации. Источники, информации, принятые ;.о внимание при экспертизе 1.Авторское свидетельство СССР №333571, кл. G 06 G 7/30, 1973. , 2.«Автоматика и телемеханика. 1962, т. XXIII, № 9, с. 1264 (прототип).
