Предлагаемое устройство относится к транспортным средствам и может быть применено для обеспечения автоматического регулирования схождения управляемых колес в процессе движения.
Известно устройство для автоматического регулирования схождения управляемых колес в процессе движения, содержащее датчики боковой реакции дороги, действующей на управляемые колеса, представляющие собой пьезодатчики в виде шайб, установленных на осях управляемых колес и электрически соединенных по мостовой схеме, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, электрически связанную с датчиками боковой реакции дороги (Патент РФ №49257, 10.11.2005, Бюл. №31).
Недостатком данного устройства являются низкие чувствительность, точность и надежность, т.к. датчики боковой реакции дороги реагируют также и на осевые силы, возникающие в обоймах конических подшипников колес от вертикальных нагрузок.
Наиболее близким к предлагаемому устройству является устройство для непрерывного автоматического регулирования схождения управляемых колес в движении, содержащее датчики боковых реакций дороги, представляющие собой электрически соединенные по мостовой схеме тензодатчики, установленные на торцевых поверхностях колец, посаженных на осях поворотных цапф, на которых на втулках установлены подшипники управляемых колес, и усилитель электрического сигнала, реверсивный механизм изменения рабочей длины поперечной рулевой тяги и систему управления указанным механизмом, электрически связанную с датчиками боковой реакции дороги (Патент РФ №2348913, 10.03.2009, Бюл. №7).
Недостатками данного устройства являются: недостаточные чувствительность и точность без усиления электрического сигнала от датчиков боковых реакций дороги, а с усилителем - сложность конструкции, снижение надежности и затраты электрической энергии на работу усилителя.
Техническим результатом предлагаемого устройства для автоматического регулирования схождения управляемых колес автомобиля в процессе движения является повышение чувствительности и точности, упрощение конструкции, снижение стоимости и затрат на эксплуатацию, повышение надежности.
Указанный технический результат достигается тем, что в устройстве для автоматического регулирования схождения управляемых колес автомобиля в процессе движения, содержащем управляемые колеса с подшипниками, оси с поворотными кулаками, втулки, кольца и шайбы с гайками их крепления на осях, тензодатчики, соединенные в электрический мост, являющиеся датчиками боковых реакций дороги, источник электропитания, электромагнитную катушку, распределительное устройство, емкость с рабочей жидкостью, насос, поперечную тягу с реверсивным механизмом, кольца имеют по три равнорасположенных равных между собой боковых среза, а тензодатчики устанавливаются на торцевых поверхностях колец между этими срезами и соединяются между собой, что повышает чувствительность конструкции, точность и позволяет исключить усилитель электрического сигнала.
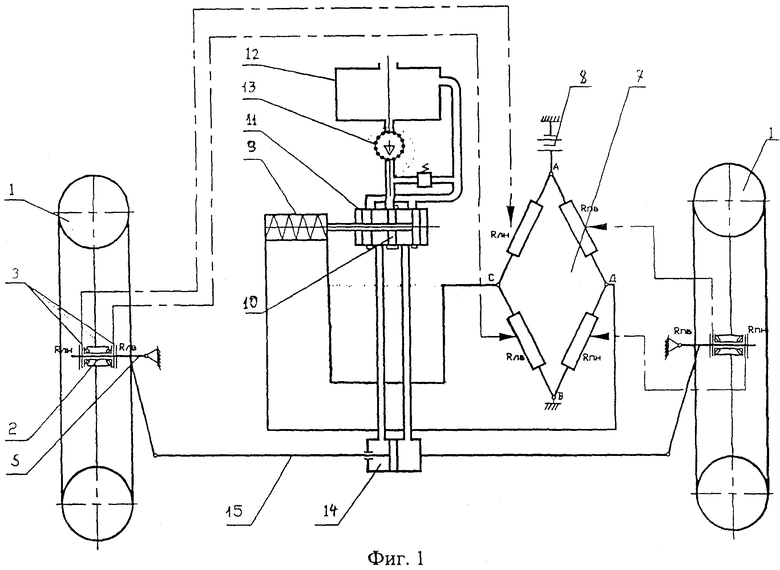
На фиг.1 изображена общая схема предлагаемого устройства; на фиг.2 - ось управляемого колеса в сборе.
Предлагаемое устройство включает в себя управляемые колеса 1, установленные через подшипники, посаженные на втулки 2, кольца 3 с боковыми срезами 4, расположенными под углом 60° друг к другу, на осях 5. Тензодатчики (электрические датчики боковых реакций дороги) 6 закреплены на торцевых поверхностях колец 3, имеют одинаковые электрические сопротивления и соединены по мостовой схеме 7. Точки А и В электрического моста 7 соединены с источником электропитания 8, а точки С и Д - с электромагнитной катушкой 9, сердечник которой жестко связан с золотником 10 распределительного устройства 11 потока рабочей жидкости. Устройство также содержит емкость 12, насос 13 и реверсный механизм изменения рабочей длины поперечной рулевой тяги (гидроцилиндр) 14. Тензодатчики 6, электрический мост 7, источник электропитания 8, электромагнитная катушка 9 и распределительное устройство 11 образуют систему управления реверсивным механизмом 14 изменения рабочей длины поперечной рулевой тяги 15.
Зазор в подшипниках (внутренние обоймы 16, ролики 17, наружные обоймы не показаны) управляемых колес регулируется гайкой 18 с шайбой 19. Втулка 2 закрепляется на оси 5 управляемых колес гайкой 20 с шайбой 21.
Устройство работает следующим образом.
При прямолинейном движении автомобиля и правильном схождении управляемых колес боковые реакции дороги на эти колеса отсутствуют, а сопротивления тензодатчиков равны между собой, поэтому напряжение, подаваемое с точек С и Д электрического моста 7 на электромагнитную катушку 9, равно нулю и золотник 10 распределительного устройства 11 находится в центральном (нейтральном) положении.
При отклонении схождения в положительную или отрицательную стороны управляемые колеса 1 за счет боковых реакций дороги через втулки 2 и кольца 3 будут воздействовать на тензодатчики 6 и изменять их электрическое сопротивление. При этом между точками С и Д моста 7 возникает напряжение, подаваемое на электромагнитную катушку 9. Ток в катушке 9 вызовет магнитный поток, перемещающий сердечник катушки 9 и золотник 10 распределительного устройства 11 влево или вправо, обеспечивая подачу рабочей жидкости от насоса 13 в ту или иную полость гидроцилиндра (реверсивного механизма) 14 изменения рабочей длины поперечной рулевой тяги 15, изменяя, таким образом, ее длину и обеспечивая требуемое схождение колес 1.
Таким образом, предлагаемое устройство для автоматического регулирования схождения управляемых колес автомобиля в процессе движения повышает чувствительность и точность, упрощает конструкцию, повышает надежность, снижает стоимость и затраты на эксплуатацию устройства, обеспечивает правильное положение управляемых колес при различных режимах движения (разгон, накат, торможение), что способствует снижению сопротивления движению, износа шин и расхода топлива.
Изобретение относится к транспортным средствам и может быть применено для обеспечения непрерывного автоматического регулирования схождения управляемых колес автомобиля в процессе движения. Устройство содержит управляемые колеса, втулки, тензодатчики, оси с поворотными кулаками, источник электропитания, электромагнитную катушку, распределительное устройство, емкость с рабочей жидкостью, насос и поперечную тягу с реверсивным механизмом. Тензодатчики, закрепленные на торцевых поверхностях колец, являются датчиками боковой реакции дороги и соединены по мостовой схеме с источником электропитания и электромагнитной катушкой. Сердечник электромагнитной катушки жестко связан с золотником распределительного устройства потока рабочей жидкости, сообщенного с емкостью для рабочей жидкости, насосом и гидроцилиндром реверсивного механизма изменения рабочей длины поперечной рулевой тяги. Кольца имеют по три равнорасположенных равных между собой боковых среза, а тензодатчики устанавливаются на торцевых поверхностях колец между этими срезами и соединяются между собой. Достигается повышение надежности, чувствительности и точности непрерывного автоматического регулирования схождения управляемых колес автомобиля в движении. 2 ил.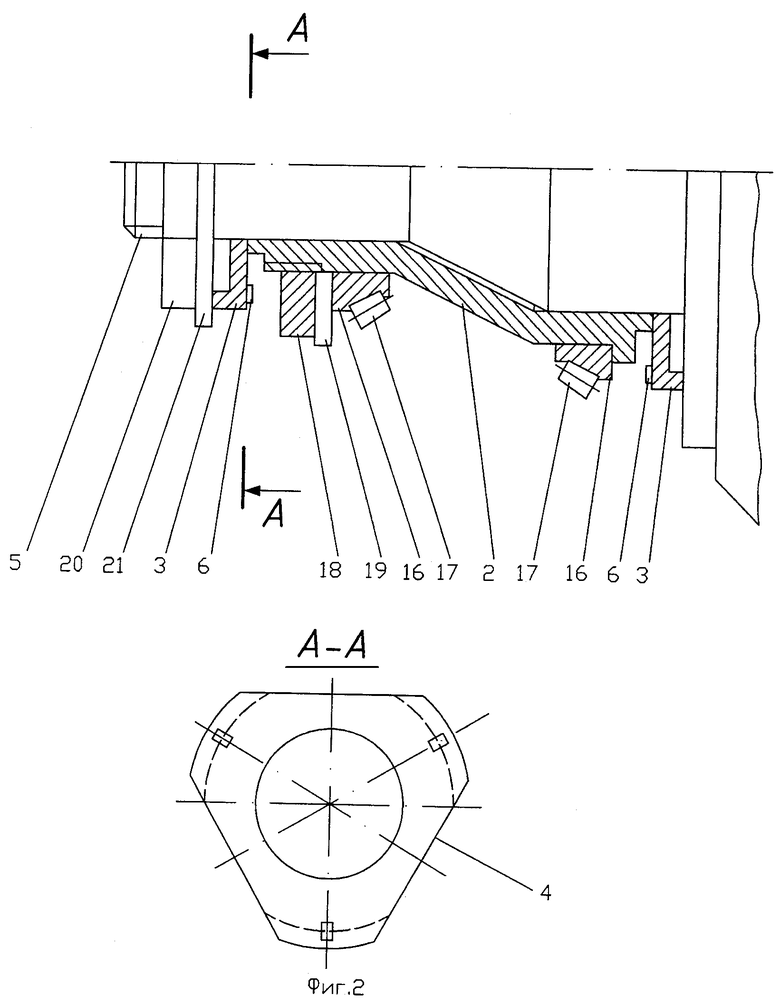
Устройство для автоматического регулирования схождения управляемых колес автомобиля в процессе движения, содержащее управляемые колеса, установленные через подшипники, посаженные на втулки, на оси с поворотными кулаками, втулки, кольца и шайбы с гайками их крепления на осях, тензодатчики, закрепленные на торцевых поверхностях колец, соединенные по мостовой схеме и являющиеся датчиками боковых реакций дороги, источник электропитания, электромагнитную катушку, сердечник которой жестко связан с золотником распределительного устройства потока рабочей жидкости, емкость с рабочей жидкостью, насос и реверсивный механизм изменения рабочей длины поперечной рулевой тяги, отличающееся тем, что кольца имеют по три равнорасположенных равных между собой боковых среза, а тензодатчики устанавливаются на торцевых поверхностях колец между этими срезами и соединяются между собой.
| RU 23489913 C1, 10.03.2009 | |||
| УПРАВЛЯЕМЫЙ КОЛЕСНЫЙ МОДУЛЬ С ИЗМЕНЯЕМЫМИ УГЛАМИ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС | 2003 |
|
RU2292286C2 |
| US 4493493 A, 15.01.1985 | |||
| US 4716982 A, 05.01.1988 | |||
| US 4795187 A, 03.01.1989. | |||

