Изобретение относится к области радионавигации, а конкретно - к приемникам сигналов спутниковых радионавигационных систем (СНРС) ГЛОНАСС (Россия) [1] и GPS (США) [2], осуществляющих одновременный прием сигналов этих систем в частотном диапазоне L1 c кодовой модуляцией С/А кодом - кодом "стандартной точности".
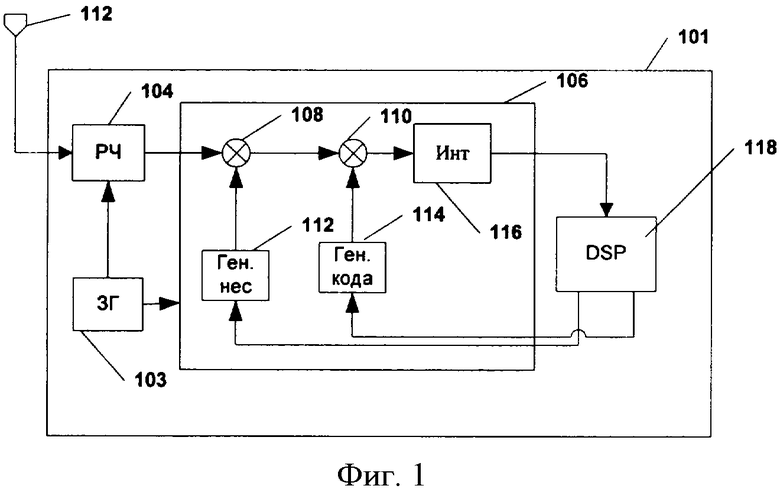
Известен приемник (Ito et al. GPS Receiver Using Software Correlation for Acquisition and Hardware Correlation for Tracking. US Patent 7002515, 21.02.2006), содержащий последовательно соединенные радиочастотный преобразователь, вычислитель, центральный процессор (ЦП), оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ) и блок внешнего интерфейса. На фиг.1 представлена упрощенная функциональная схема навигационного приемника-аналога 101, на которой отражены только основные существенные функциональные блоки. Сигнал, принятый антенной 102, подается на радиочастотный блок 104, который его усиливает, фильтрует, выполняет преобразование на более низкие частоты и преобразует в цифровую форму. Радиочастотный блок 104 имеет два цифровых выхода: по одному из которых выдается сигнал GPS, а по другому - сигнал ГЛОНАСС. Оба этих сигнала подаются на вход блока цифровой обработки 106, содержащего несколько каналов корреляционной обработки, каждый из которых может подключаться ко входу GPS или ко входу ГЛОНАСС. Кроме того, в приемнике имеется задающий генератор 103, выполненный в виде обычного кварцевого генератора или температурно-компенсированного кварцевого генератора (ТСХО) и вырабатывающий опорную частоту для синтезатора частот гетеродинов радиочастотного блока 104, а также тактовые частоты для блока цифровой обработки 106 и цифрового сигнального процессора (DSP) 118. Каждый канал корреляционной обработки содержит умножитель 108, коррелятор 110, генератор несущей частоты 112, генератор кода 114 и интегратор 116. Умножитель 108 умножает входной сигнал на сигнал опорной частоты, поступающий от генератора несущей частоты 112. Коррелятор 110 умножает сигнал на копию псевдослучайного кода, соответствующего выбранному спутнику GPS или ГЛОНАСС. Копия псевдослучайного кода вырабатывается генератором кода 114. Выход коррелятора 110 интегрируется в интеграторе 116. Выход интегратора 116 подается на вход цифрового сигнального процессора (DSP) 118 для осуществления слежения за фазой несущей и фазой кода. Синфазная и квадратурная компоненты, передаваемые с выхода интегратора 116 на вход DSP 118, содержат информацию о фазе несущей и фазе кода, которая необходима для осуществления слежения.
Совокупность генератора несущей 112, умножителя 108, интегратора 116 и DSP 118 работает как петля слежения за фазой несущей, которая компенсирует частотные сдвиги между различными частотными каналами ГЛОНАСС, а также сдвиг частоты задающего генератора 103 и Допплеровские сдвиги частоты спутниковых сигналов. Совокупность генератора кода 114, интегратора 116 и DSP 118 работает как петля слежения за фазой кода, которая компенсирует любые сдвиги по фазе кода принятого сигнала. Совокупность петли слежения за фазой несущей и петли слежения за фазой кода образует канал корреляционной обработки. Обычно блок цифровой обработки 106 содержит аппаратные средства для реализации от 12 до 24-х каналов корреляционной обработки.
Навигационный приемник 101 может работать в двух основных режимах: режиме поиска и режиме слежения. Режим поиска включается сразу же после включения питания. В этом режиме приемник 101 должен произвести поиск навигационного сигнала выбранного спутника GPS или ГЛОНАСС в некотором диапазоне псевдодопплеровских частот и некотором диапазоне фаз псевдослучайного кода. Поскольку период псевдослучайного кода GPS и ГЛОНАСС равен 1 мс, то полный диапазон фаз псевдослучайного кода соответствует диапазону задержек кода от 0 до 1 мс. Если сигнал выбранного спутника обнаружен, то один из каналов корреляционной обработки инициализируется в соответствии с частотой несущей и фазой кода обнаруженного сигнала, выбирается другой спутник GPS или ГЛОНАСС, и процесс поиска повторяется для нового выбранного спутника. Если сигнал выбранного спутника не обнаружен, то процесс поиска также повторяется для нового выбранного спутника, но инициализация канала корреляционной обработки не производится.
Режим поиска остается основным до тех пор, пока не будет обнаружено необходимое для решения навигационной задачи количество сигналов спутников (4 спутника GPS или 4 спутника ГЛОНАСС, или всего 5 спутников смешанного созвездия), из этих сигналов не выделены навигационные данные, необходимые для решения навигационной задачи, и не выполнено первое решение навигационной задачи. После этого основным становится режим слежения, а поиск либо прекращается, либо выполняется параллельно со слежением в каналах корреляционной обработки время от времени для увеличения количества первичных измерений псевдодальностей и псевдодопплеровских частот на входе блока решения навигационной задачи и повышения геометрического фактора.
Во время режима поиска приемник 101 использует априорные данные. Например, в приемнике имеются сведения о номинальных несущих частотах сигналов GPS и ГЛОНАСС. Однако во многих случаях эти априорные данные являются слишком неточными для осуществления быстрого поиска. Во-первых, сдвиг частоты задающего генератора может достигать ±30 кГц в переводе на номинальную несущую частоту для недорогих устройств, применяемых в приемниках, предназначенных для массового потребительского рынка. Во вторых, Допплеровский сдвиг, вызванный относительным движением передающего спутника и навигационного приемника, изменяет частоту принятого сигнала. В случае высокой динамики объекта, на котором установлен приемник, Допплеровский сдвиг может также достигать ±30 кГц для объектов со скоростями до 6 км/с. Таким образом, в этих случаях поиск должен производиться в диапазоне частот ±30 кГц и диапазоне задержек от 0 до 1 мс.
Для выполнения такого поиска в навигационном приемнике применяется последовательная процедура, при которой последовательно перебираются все возможные комбинации значений несущей частоты и фазы кода из области поиска до тех пор, пока выход интегратора 116 не превысит некоторый порог, указывая на то, что сигнал обнаружен. Используя несколько каналов корреляционной обработки, можно организовать одновременный поиск в нескольких комбинациях несущая частота-фаза кода, тем самым сократив время до обнаружения сигнала.
Однако в условиях высокой динамики объекта время, необходимое для обнаружения сигнала, очень велико, если для поиска используются обычные каналы корреляционной обработки, число которых не превышает 12-24, либо необходимое число каналов оказывается чрезвычайно большим, если обнаружение сигнала должно быть произведено за практически приемлемое время. В самом деле, количество возможных комбинаций несущая частота-фаза кода в области поиска можно оценить следующим образом:

где
ΔF=60 кГц - размер области поиска по частоте;
δF=500 Гц - шаг поиска по частоте при времени накопления Т=1 мс в интеграторе 116;
 - отношение полного диапазона поиска по фазе кода к шагу поиска по фазе кода; при шаге поиска, равном 0,5 длительности символа псевдослучайного кода, имеем
- отношение полного диапазона поиска по фазе кода к шагу поиска по фазе кода; при шаге поиска, равном 0,5 длительности символа псевдослучайного кода, имеем  для GPS, и
для GPS, и  для ГЛОНАСС. Отсюда N≈2.4·106 для GPS и N≈1.2·106 для ГЛОНАСС. Полное время поиска сигнала одного спутника можно определить по формуле:
для ГЛОНАСС. Отсюда N≈2.4·106 для GPS и N≈1.2·106 для ГЛОНАСС. Полное время поиска сигнала одного спутника можно определить по формуле:

где
Тасс - время накопления при одной комбинации несущая частота-фаза кода.
Nch - число параллельных каналов, участвующих в поиске.
Поскольку мощность сигналов GPS и ГЛОНАСС чрезвычайно мала, время накопления Тасс должно быть достаточно длительным, чтобы обеспечить приемлемые характеристики обнаружения сигналов. Обычно это время в навигационных приемниках составляет от 4-х до 20 мс. Тогда при времени накопления Т=10 мс и параллельном поиске Nch=24-мя каналами полное время поиска сигнала одного спутника TS1 составляет: 2.4·105·10-2/24=100 с для GPS и 1.2·105·10-2/24=50 с для ГЛОНАСС, что недопустимо много для большинства приложений.
Таким образом, существенным недостатком приемника-аналога является большое время поиска сигнала. Для уменьшения этого времени до приемлемых 1-3 с требуется от нескольких сотен до нескольких тысяч каналов корреляционной обработки, что существенно увеличивает размеры микросхемы, в которой реализуется цифровая обработка, ее энергопотребление и стоимость. В то же время, в режиме слежения нет необходимости в таком большом числе корреляционных каналов.
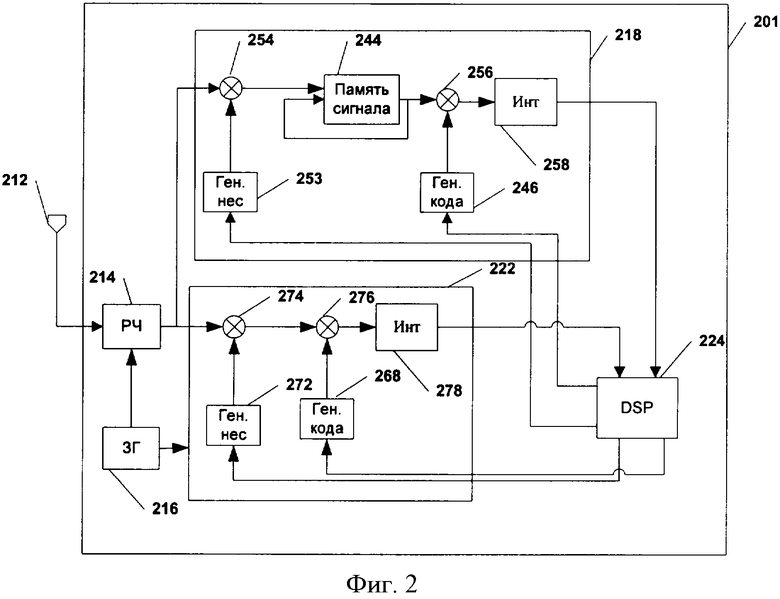
Наиболее близким является приемник (Best. GPS Receiver Having Dynamic Correlator Allocation Between a Memory-Enhanced Channel for Acquisition and Standard Channels for Tracking. US Patent 7,061,972, 13.06.2006), содержащий последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, и N канальный цифровой коррелятор, связанный посредством блока обмена данными с вычислителем, содержащим центральный процессор (ЦП), ОЗУ, ПЗУ и блок внешнего интерфейса, входы-выходы которого образуют информационные входы-выходы приемника, причем N канальный цифровой коррелятор содержит генератор временной шкалы приемника, несколько обычных каналов (далее «каналы слежения») и несколько каналов с дополнительной памятью (далее «поисковые каналы»), а каждый канал цифрового коррелятора содержит входной мультиплексор GPS/ГЛОНАСС, генератор несущей, смеситель несущей, генератор кода, смеситель кода и интегратор. На фиг.2 приведена упрощенная функциональная схема прототипа, содержащая антенну 212, радиочастотный блок 214, задающий генератор 216, несколько поисковых каналов 218, несколько каналов слежения 222 и сигнальный процессор 224. Каждый канал слежения 222 построен по известной схеме с генератором несущей 272, смесителем несущей 274, генератором кода 268, смесителем кода 276 и интегратором 278. Каждый поисковый канал 218 содержит генератор несущей 253, смеситель несущей 254, память выборок сигнала 244, генератор кода 246, смеситель кода 256 и интегратор 258.
В режиме поиска оцифрованные выборки комплексного сигнала с выхода радиочастотного блока 214 после компенсации в смесителе несущей 254 частотного смещения, вызванного смещением частоты задающего генератора и взаимным движением спутника и приемника, когерентно накапливаются в памяти 244, образуя так называемую супервыборку сигнала. Длительность когерентного накопления в памяти 244 составляет 20 мс, что соответствует длительности одного бита навигационного сообщения. По истечении 20 мс супервыборка подвергается корреляционной обработке, при которой выборки сигнала, из которых состоит супервыборка, последовательно умножаются в смесителе кода 256 на СА-код, генерируемый генератором кода 246, а результат умножения интегрируется в интеграторе 258 и результат интегрирования сравнивается с порогом обнаружения. Если частота несущей, генерируемая в генераторе 253, совпадает или достаточно близка к частоте входного сигнала и фаза кода, генерируемого в генераторе 246, достаточно близка к фазе кода входного сигнала, то результат на выходе интегратора 258 содержит сигнал плюс шум и с большой вероятностью превысит порог обнаружения. В противном случае результат на выходе интегратора 258 содержит только шум и с большой вероятностью не превысит порог обнаружения. В этом случае процесс корреляционной обработки повторяется с другой начальной фазой кода, генерируемого генератором кода 246, до тех пор, пока не будут пройдены все возможные 2046 значений фазы кода.
Для ускорения поиска в приемнике-прототипе дополнительно используются смесители кода 276 и интеграторы 278 нескольких следящих каналов 222. При этом производятся переключения в схеме следящих каналов таким образом, что на один вход смесителя кода 276 подаются те же элементы супервыборки из памяти 244, что и на вход смесителя кода 256, а на другой вход смесителя кода 276 подается СА-код, генерируемый генератором кода 246 и задержанный на один или несколько символов СА кода. Благодаря этому на выходах интеграторов 258 и 278 формируются корреляционные интегралы сразу для нескольких значений фазы СА-кода, и время прохода всех 2046 значений фазы кода уменьшается в Nch раз, где Nch - общее количество каналов, включая поисковые и следящие, смесители которых подключены к памяти 244.
Недостатками прототипа являются:
- эффективная полоса поиска в частотной области при одном проходе по всем 2046 значениям фазы СА-кода сокращается до 50 Гц из-за предварительного когерентного накопления в супервыборке 20 мс. Поэтому дальнейший поиск в полном частотном диапазоне ±30 кГц должен производиться с шагом 25 Гц, и полное время поиска сигнала одного спутника составит 2·30·103·20·10-3/25 с=48 с, что недопустимо много для большинства приложений;
- за время когерентного накопления 20 мс при больших псевдодопплеровских частотах смещение фазы кода сигнала может достигать 0,5÷1 символа СА-кода, в результате чего когерентное сложение сигнала в памяти 244 будет происходить с разными фазами СА-кода, и уровень сигнала в накопленной супервыборке существенно снизится;
- примененная в прототипе процедура порогового обнаружения не обеспечивает надежного обнаружения даже сильного сигнала, поскольку при большом числе возможных комбинаций несущая частота-фаза кода в области поиска велика вероятность превышения порога в результате воздействия шума или боковых лепестков взаимной корреляционной функции между сигналом и его копией;
- накопление супервыборки в памяти 244 должно быть синхронизировано с границей бита навигационного сообщения, а данные для такой синхронизации могут быть получены только от внешнего источника, т.е. работа приемника-прототипа в полностью автономном режиме невозможна.
Предлагаемым изобретением решается задача сокращения времени поиска сигнала спутника до 1÷3 с при большом числе N возможных комбинаций несущая частота-фаза кода в области поиска (N=1.2·106÷2.5·106) без снижения уровня сигнала из-за смещения фазы СА-кода на интервале накопления, без существенного увеличения объема аппаратуры и без необходимости получения данных от внешних источников.
Для достижения этого технического результата в приемник спутниковой навигации с устройством быстрого поиска навигационных сигналов в условиях высокой динамики объекта, содержащий последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, и N канальный цифровой коррелятор, связанный посредством блока обмена данными с вычислителем, содержащим связанные шиной обмена данными центральный процессор (ЦП), ОЗУ, ПЗУ и блок внешнего интерфейса, входы-выходы которого образуют информационные входы-выходы приемника, причем N канальный цифровой коррелятор содержит генератор временной шкалы приемника, а каждый канал цифрового коррелятора содержит входной мультиплексор GPS/ГЛОНАСС, генератор несущей, смеситель несущей, генератор кода, смеситель кода и интегратор, дополнительно введено устройство быстрого поиска, содержащее синхронизатор, входной мультиплексор GPS/ГЛОНАСС, генератор несущей, смеситель несущей, один вход которого соединен с выходом генератора несущей, а второй вход соединен с выходом мультиплексора GPS/ГЛОНАСС, сдвиговый регистр комплексного сигнала, вход которого соединен с выходом смесителя несущей, регистр кода, первую группу М мультиплексоров, каждый из которых имеет К входов, причем j-й вход i-го мультиплексора соединен с (j+(i-1)·K)-м разрядом сдвигового регистра комплексного сигнала, а входы управления всех мультиплексоров соединены с выходом синхронизатора, вторую группу М мультиплексоров, каждый из которых имеет К входов, причем j-й вход i-го мультиплексора соединен с (j+(i-1)·К)-м разрядом регистра кода, а входы управления всех мультиплексоров соединены с выходом синхронизатора, М смесителей кода, причем один вход i-го смесителя кода соединен с выходом i-го мультиплексора из первой группы мультиплексоров, а второй вход i-го смесителя кода соединен с выходом i-го мультиплексора из второй группы мультиплексоров, М-входовой сумматор, входы которого соединены с выходами смесителей кода, интегратор, вход которого соединен с выходом М-входового сумматора, блок формирования квадрата модуля комплексного сигнала, вход которого соединен с выходом интегратора, второй сумматор, запоминающее устройство (ОЗУ), блок формирования адреса ОЗУ, причем один вход сумматора соединен с выходом блока формирования квадрата модуля комплексного сигнала, а второй вход соединен с выходом ОЗУ, причем вход ОЗУ соединен с выходом второго сумматора, а вход адреса ОЗУ соединен с выходом блока формирования адреса ОЗУ, блок выбора максимума, один вход которого соединен с выходом ОЗУ, а второй вход соединен с выходом блока формирования адреса ОЗУ, и пороговое устройство, вход которого соединен с выходом блока выбора максимума, а выход является выходом устройства быстрого поиска.
Признаки, отличающие предлагаемый приемник спутниковой навигации с устройством быстрого поиска навигационных сигналов от прототипа, обеспечивают решение технической задачи сокращения времени поиска сигнала спутника до 1÷3 с при большом числе N возможных комбинаций несущая частота-фаза кода в области поиска (N=1.2·106÷2.5·106) без снижения уровня сигнала из-за смещения фазы СА-кода на интервале накопления, без существенного увеличения объема аппаратуры и без необходимости получения данных от внешних источников.
На фиг.1 представлена функциональная схема приемника аналога.
На фиг.2 представлена функциональная схема приемника прототипа.
На фиг.3 представлена функциональная схема заявляемого приемника спутниковой навигации с устройством быстрого поиска.
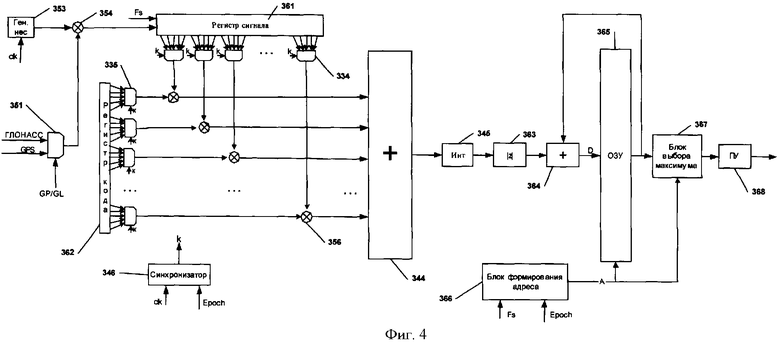
На фиг.4 представлена функциональная схема устройства быстрого поиска.
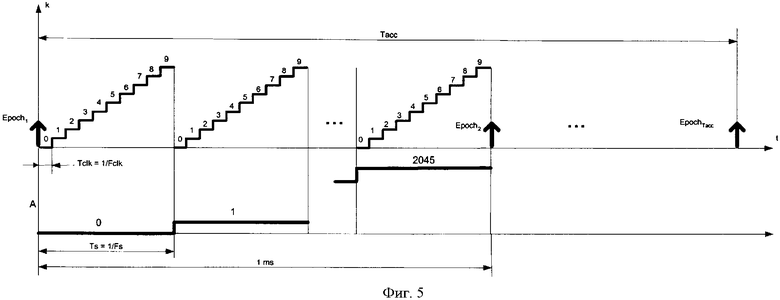
На фиг.5 представлены временные диаграммы, поясняющие работу устройства быстрого поиска.
Предлагаемый приемник спутниковой навигации с устройством быстрого поиска навигационных сигналов в условиях высокой динамики объекта работает следующим образом (фиг.3). Принятые антенной 312 сигналы СРНС GPS и ГЛОНАСС частотного диапазона L1 поступают на сигнальный вход радиочастотного преобразователя 314, в котором они усиливаются, фильтруются, переносятся на видеочастоту, и оцифровываются. При этом радиочастотный преобразователь производит выделение синфазной и квадратурной составляющих сигнала диапазона L1 GPS и сигнала диапазона L1 ГЛОНАСС. Таким образом на одном выходе радиочастотного блока 314 формируется цифровой комплексный сигнал GPS, а на втором выходе - цифровой комплексный сигнал ГЛОНАСС. В режиме поиска центральный процессор 324 по любому подходящему алгоритму последовательно перебирает все существующие в системах GPS и ГЛОНАСС спутники. Для очередного выбранного спутника центральный процессор через блок обмена 323 выдает команду в устройство быстрого поиска 318 на подключение ко входу GPS или ГЛОНАСС, установку СА-кода или псевдослучайного кода, соответствующего выбранному спутнику GPS или ГЛОНАСС, а также на установку определенной частоты несущей, которая соответствует выбранному спутнику и выбранной полосе поиска по частоте. Ширина полосы поиска по частоте составляет 1 кГц, поэтому процессор последовательно перебирает все частоты из области поиска с шагом, например, 500 Гц. Время dTs, затрачиваемое устройством быстрого поиска на поиск сигнала заданного спутника при заданной центральной частоте полосы поиска, зависит от времени накопления Тасс, которое также задается процессором в зависимости от ожидаемого уровня сигнала спутника, а точнее от ожидаемого отношения сигнал/шум. Например, для отношения сигнал/шум 40 дБГц рекомендуемое значение Тасс=20 мс, при этом отношение сигнал/шум в результате накопления составит 23 дБ, а время поиска в заданной частотной полосе dTs=Тасс+1 мс=21 мс. Для отношения сигнал/шум 20 дБГц рекомендуемое значение Тасс=2 с, при этом отношение сигнал/шум в результате накопления также составит 23 дБ, а время поиска в заданной частотной полосе dTs=2 с.
По окончании поиска в заданной частотной полосе устройство быстрого поиска 318 через блок обмена 323 выдает в центральный процессор 324 сообщение, которое содержит информацию о том, превышен или нет установленный в устройстве быстрого поиска порог обнаружения, а также значение фазы кода, соответствующее максимальной амплитуде накопленного сигнала. Если порог превышен, центральный процессор 324 через блок обмена 323 выдает в один из свободных каналов слежения N канального цифрового коррелятора 322 данные целеуказания, необходимые для инициализации петель слежения по фазе и задержке, т.е. центральную частоту, которая была установлена перед этим в устройстве быстрого поиска, и фазу кода, соответствующую максимальной амплитуде накопленного сигнала. На фиг.3 показан только один канал слежения N канального цифрового коррелятора при N=1, а в общем случае N канальный цифровой коррелятор представляет собой совокупность N таких каналов. Устройство и функционирование составных частей 346, 358, 372, 374, 376 канала слежения 322 аналогичны устройству и функционированию блоков 268, 278, 272, 274, 276 приемника прототипа на фиг.2 с тем лишь дополнением, что в канал слежения 322 (фиг.3) дополнительно введен входной мультиплексор GPS/ГЛОНАСС 371 для обеспечения возможности подключения этого канала к выходу GPS или выходу ГЛОНАСС радиочастотного преобразователя 314. После выдачи целеуказания в канал слежения центральный процессор выдает команду в устройство быстрого поиска для установки следующей частотной полосы поиска сигнала того же спутника, и описанный выше процесс поиска повторяется для вновь установленной частотной полосы. В то же время в инициализированном перед этим канале слежения продолжается слежение за фазой и задержкой сигнала с одновременной оценкой его амплитуды. По окончании поиска во вновь заданной частотной полосе центральный процессор сравнивает вновь полученную от устройства амплитуду сигнала As с амплитудой из канала слежения At, и если As>At, выдает новую команду в тот же канал слежения для его инициализации в соответствии с последней установленной в устройстве быстрого поиска центральной частотой и полученной от него фазой кода максимального накопленного сигнала. Если же As≤At, то никаких команд в канал слежения не выдается, и он продолжает непрерывное слежение за тем же сигналом.
Описанный выше процесс повторяется для всех значений частот с установленным шагом из полной области поиска. В результате по окончании перебора всех этих частот выбранный канал слежения будет следить за сигналом с максимальной амплитудой, если при одной или нескольких комбинациях несущая частота-фаза кода из области поиска произошло превышение порога обнаружения. В этом случае сигнал считается обнаруженным, следящий канал продолжает слежение, и в нем выполняются известные операции по выделению навигационного сообщения. В то же время по командам центрального процессора повторяется описанный выше процесс поиска для следующего выбранного центральным процессором спутника.
По окончании перебора всех спутников все сигналы видимых спутников будут обнаружены, и соответствующие им следящие каналы будут выдавать в центральный процессор соответствующие оценки несущих частот, фаз кода и битов навигационных сообщений. На основании этих данных центральный процессор известными методами производит оценку псевдодальностей и псевдодопплеровских частот и декодирует навигационные сообщения, а после получения эфемерид из декодированных навигационных сообщений известными методами решает навигационную задачу, выдавая потребителю информацию о местоположении и векторе скорости через блок внешнего интерфейса 327.
Устройство быстрого поиска (фиг.4) работает следующим образом. Перед началом поиска по команде центрального процессора в генератор несущей 353 записывается значение центральной частоты выбранной центральным процессором полосы поиска, вход смесителя несущей 354 через мультиплексор 351 с помощью сигнала GP/GL подключается к сигнальному входу GPS или ГЛОНАСС в соответствии с принадлежностью выбранного спутника, а в регистр кода 362 записываются отсчеты копии СА-кода или псевдослучайного кода выбранного спутника. Количество записанных отсчетов равно количеству тактов частоты выборки сигнала за 1 мс. Так, при частоте выборки Fs=2,5 МГц количество отсчетов в регистре кода равно 2500.
После этого по ближайшему сигналу миллисекундной эпохи (Epoch0), поступающему от генератора временной шкалы приемника 319 один раз каждую миллисекунду, начинается запись комплексных цифровых отсчетов с выхода смесителя несущей 354 в сдвиговый регистр сигнала 361. Запись в сдвиговый регистр тактируется основной частотой выборки Fs, и если например Fs=2,5 МГц, то количество отсчетов, записываемых в регистр сигнала 361 в течение 1 мс, равно 2500. Если сигнал спутника попадает в текущую частотную полосу поиска, то изменение фазы записываемого сигнала в течение 1 мс не превышает π/2. Для когерентного накопления можно считать эту фазу постоянной на интервале 1 мс.
После поступления следующего сигнала миллисекундной эпохи (Epoch1) включается блок синхронизации 346 и блок формирования адреса ОЗУ 366, работа которых поясняется временными диаграммами фиг.5. Блок синхронизации 346, по-существу, представляет собой обычный двоичный счетчик, выход которого линейно изменяется в диапазоне от 0 до К-1 на периоде, равном K/Fclk. Например, если К=10, как показано на фиг.5, то период выходного сигнала блока синхронизации равен периоду тактовой частоты выборки Fs.
Такое равенство периодов существенно для работы заявляемого устройства. Оно обеспечивается выбором:

На первом такте частоты Fclk значение сигнала управления к=0 на всех мультиплексорах первой и второй групп, поэтому на i-й смеситель кода 356 подается сигнал с (i·K)-го разряда сдвигового регистра сигнала 361 и сигнал с (i·K)-го разряда регистра кода 362, а выходы всех смесителей суммируются в М-входовом сумматоре 344. Значение полученной суммы с выхода М-входового сумматора 344 передается в интегратор 345, где она складывается с ранее накопленным значением, которое на первом такте частоты Fclk равно нулю.
На втором такте частоты Fclk значение сигнала управления к=1 на всех мультиплексорах первой и второй групп, поэтому на i-й смеситель кода 356 подается сигнал с (1+(i·K))-го разряда сдвигового регистра сигнала 361 и сигнал с (1+(i·K))-го разряда регистра кода 362. Выход М-входового сумматора снова суммируется в интеграторе 345 с ранее накопленным значением.
Далее этот процесс повторяется для к=2, 3, ..., 9. В результате в интеграторе 345 накапливается значение:

где
zn, n=0, ... КМ-1 - отсчеты комплексного сигнала из регистра сигнала 361;
Сn, n=0, ... КМ-1 - отсчеты копии из регистра кода 362.
Таким образом, значение накопленной суммы в интеграторе 345 в конце первого периода частоты выборки Fs равно корреляционному интегралу при нулевой фазе копии СА-кода или псевдослучайного кода относительно миллисекундной эпохи приемника. Выражение (4) означает когерентное накопление сигнала на интервале 1 мс. По первому тактовому сигналу частоты Fs в блоке 363 формируется значение квадрата модуля накопленного сигнала, и это значение суммируется в сумматоре 364 с ранее накопленным значением, хранящимся в 0-й ячейке ОЗУ 365, которое в рассматриваемом (первом) миллисекундном интервале равно нулю.
По первому тактовому сигналу частоты Fs адрес на выходе блока формирования адреса 366 увеличивается на 1 и становится равным А=1, а содержимое регистра сигнала 361 сдвигается вправо на один бит, и в нулевой разряд этого регистра записывается новое текущее значение сигнала. Таким образом, содержимое n-го разряда регистра сигнала можно теперь записать как zn+1, n=0, ... KM. Кроме того, благодаря соотношению (3) значение на выходе блока синхронизации 346 к=0, и далее процесс накопления корреляционного интеграла снова выполняется в течение нового периода частоты выборки Fs для к=0, 1, ..., 9, как это показано на фиг.5. В конце этого периода накопленное в интеграторе значение равно:

и по следующему тактовому сигналу частоты выборки Fs в блоке 363 формируется значение квадрата модуля накопленного сигнала S1, и это значение модуля суммируется в сумматоре 364 с ранее накопленным значением, хранящимся в 1-й ячейке ОЗУ 365, которое в рассматриваемом (первом) миллисекундном интервале равно нулю.
Описанный выше процесс корреляции повторяется в течение 1 мс для остальных (KM - 2) периодов частоты выборки Fs. В результате в ОЗУ 365 оказываются записанными значения квадратов модулей корреляционных интегралов для всех возможных фаз кода с шагом, соответствующим частоте выборки Fs:

После поступления следующего сигнала миллисекундной эпохи (Epoch1) описанный выше процесс корреляции повторяется в течение следующего миллисекундного интервала, и в момент поступления следующего сигнала миллисекундной эпохи (Epoch2) в m-ю ячейку ОЗУ 365 оказывается записанной сумма квадратов модулей корреляционных интегралов для m-й фазы кода, полученных на первом и втором миллисекундном интервалах: |Sm|2 1+|Sm|2 2.
Далее описанный выше процесс корреляции повторяется в течение нескольких миллисекунд, а точнее в течение времени Тасс, заданного процессором. По истечении этого времени в m-ю ячейку ОЗУ 365 оказывается записанной сумма квадратов модулей корреляционных интегралов для m-й фазы кода, причем эта сумма распространяется на все миллисекундные эпохи в интервале накопления Тасс:

где Nacc=10-3·Тасс - количество миллисекундных интервалов в полном интервале накопления.
По окончании заданного времени накопления Тасс блок выбора максимума 367 последовательно анализирует все ячейки ОЗУ 365, содержащие значения Rm, m=0, ... КМ-1, и запоминает адрес ячейки mmax с максимальным содержимым, а ее содержимое выдается на пороговое устройство 368. Если порог обнаружения, установленный в пороговом устройстве 368, превышен, то значения mmax и Rmmax передаются через блок обмена 323 в центральный процессор 324 в сообщении, которое, как было указано выше, содержит информацию о том, превышен или нет установленный в устройстве быстрого поиска порог обнаружения, а также значение фазы кода, соответствующее максимальной амплитуде накопленного сигнала.
Выражения (6), (7) показывают, что заявляемое устройство быстрого поиска обеспечивает когерентное накопление сигнала на интервале 1 мс и последующее некогерентное накопление на интервале Тасс. При типичном для условий «открытого неба» отношении сигнал-шум 46 дБГц надежное обнаружение сигнала в устройстве быстрого поиска, работающем в соответствии с (6), (7), обеспечивается при времени накопления Тасс=10 мс, т.к. отношение сигнал/шум при Тасс=10 мс составляет 25 дБ. Полное время поиска сигнала одного спутника в заявляемом устройстве быстрого поиска в полосе частот 60 МГц при шаге поиска 500 Гц составляет:

Аналогично, при более слабом сигнале 40 дБГц необходимое время накопления составит Тасс=20 мс, и полное время поиска сигнала одного спутника Ts1=0.021·60/0.5=2.52 с.
Заявляемый приемник и устройство быстрого поиска состоят из функциональных блоков, устройство которых широко известно в области спутниковой навигации. Например, различные методы реализации радиочастотного преобразователя 314 описаны в [5], [6] и [7], в заявляемом приемнике может быть использована любая из микросхем, описанных в [6]. Устройство следящих каналов также хорошо известно из [5]. В качестве центрального процессора 324 может быть использован, например, ADSP-2188N компании Analog Devices, в качестве задающего генератора 316 - любая из выпускаемых различными компаниями микросхем ТСХО или кварцевых генераторов, в качестве ОЗУ 326, ПЗУ 325 и блока внешнего интерфейса 327 - любые из выпускаемых электронной промышленностью микросхем.
Предлагаемый приемник спутниковой навигации с устройством быстрого поиска навигационных сигналов в условиях высокой динамики объекта обеспечивает решение технической задачи поиска и обнаружения навигационных сигналов за приемлемое время 1-3 с даже при относительно слабых навигационных сигналах. При этом оно может работать при относительно невысоких тактовых частотах порядка 25 МГц, а необходимый для него объем аппаратуры, в основном, связан с реализацией сдвигового регистра сигнала 361 и регистра кода 362. При частоте выборки сигнала Fs=2.5 МГц длина каждого из этих регистров составляет 2500 элементов, причем элементы регистра кода 362 - одноразрядные, а разрядность элементов регистра сигнала 361 составляет 4-5 бит. Таким образом, полное число бит в регистрах 362 и 362 не превышает 15000, что легко реализуемо в современных заказных интегральных схемах и даже в программируемых логических интегральных схемах (ПЛИС). Например, в средней по объему ресурсов ПЛИС Xilinx xc3s1500 каждые 10 элементов сдвиговых регистров вместе с соответствующим мультиплексором 334 или 335 могут быть реализованы в одной логической ячейке. Поэтому общее количество логических ячеек, необходимое для реализации регистров 361 и 362 вместе с мультиплексорами 334, 335 равно 1500, тогда как полное количество число логических ячеек в ПЛИС xc3s1500 равно 30 000. Кроме того, ОЗУ 365 может быть реализовано на двух из 32-х имеющихся в составе ПЛИС xc3s1500 блоков памяти BLOCK RAM. Таким образом, устройство быстрого поиска занимает не более (5-6) % ресурсов средней по объему ПЛИС.
Источники информации
1. "Глобальная Навигационная Спутниковая Система - ГЛОНАСС. Интерфейсный контрольный документ. КНИЦ ВКС Россия", 1995.
2. Interface Control Document ICD-GPS-200, rev. C, 1993.
3. Ito et al. GPS Receiver Using Software Correlation for Acquisition and Hardware Correlation for Tracking. US Patent 7002515, 21.02.2006.
4. Best. GPS Receiver Having Dynamic Correlator Allocation Between a Memory-Enhanced Channel for Acquisition and Standard Channels for Tracking. US Patent 7061972, 13.06.2006.
5. A.J.Dierendonck. GPS Receivers. In: Global Positioning System: Theory and Applications by B.W.Parkinson, J.J.Spilker Jr, eds., vol.1, 1996.
6. D.K.Shaeffer, T.H.Lee. The Design and Implementation of Low-Power CMOS Radio Receivers. Kluwer Academic Publishers, Boston/Dordrecht/London, 1999.
7. Raymond A. Eastwood "An Integrated GPS/Glonass receiver". - "Navigation" (USA), 1990, 2, - pp.141-151.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОПАРАМЕТРИЧЕСКОГО СЛЕЖЕНИЯ ЗА НАВИГАЦИОННЫМИ СИГНАЛАМИ И ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С МНОГОПАРАМЕТРИЧЕСКИМ УСТРОЙСТВОМ СЛЕЖЕНИЯ ЗА СЛАБЫМИ СИГНАЛАМИ В УСЛОВИЯХ СВЕРХВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2012 |
|
RU2551805C2 |
| СПОСОБ ОЦЕНИВАНИЯ ФАЗЫ НАВИГАЦИОННОГО СИГНАЛА НА ФОНЕ МЕШАЮЩИХ ОТРАЖЕНИЙ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ И НАВИГАЦИОННЫЙ ПРИЕМНИК С УСТРОЙСТВОМ ПОДАВЛЕНИЯ МЕШАЮЩИХ ОТРАЖЕНИЙ ПРИ ОЦЕНКЕ ФАЗЫ | 2016 |
|
RU2625804C1 |
| Способ обнаружения, оценки параметров и подавления имитационных помех и навигационный приемник с устройством обнаружения, оценки параметров и подавления имитационных помех | 2020 |
|
RU2737948C1 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| ЦИФРОВОЙ КОРРЕЛЯТОР ПРИЕМНИКА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2310212C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
Изобретение относится к радионавигации, конкретно к приемникам сигналов спутниковых радионавигационных систем GPS и ГЛОНАСС открытого кода частотного диапазона L1. Технический результат заключается в уменьшении времени поиска сигнала. Приемник содержит радиочастотный преобразователь, N канальный цифровой коррелятор с устройством быстрого поиска и формирователем сигналов меток времени и вычислитель, в котором устройство быстрого поиска содержит входной мультиплексор сигналов GPS/ГЛОНАСС, цифровой генератор несущей, смеситель несущей, сдвиговый регистр сигнала, регистр кода, М мультиплексоров сигнала, М мультиплексоров кода, М смесителей кода, М-входовой сумматор, интегратор, блок вычисления квадрата модуля комплексного числа, второй сумматор, ОЗУ, блок формирования адреса ОЗУ, блок выбора максимума, пороговое устройство и синхронизатор. Устройство быстрого поиска обеспечивает когерентное накопление сигнала на интервале 1 мс с последующим некогерентным накоплением в течение времени, задаваемого вычислителем в зависимости от ожидаемого отношения сигнал-шум. 5 ил.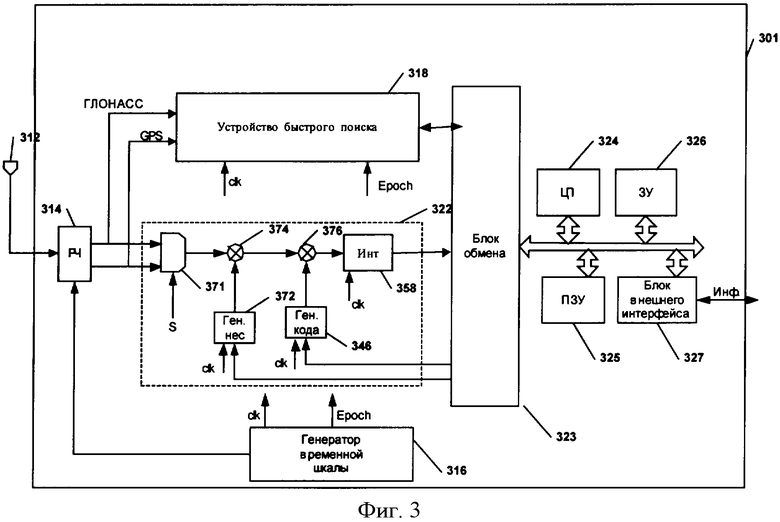
Приемник спутниковой навигации с устройством быстрого поиска навигационных сигналов в условиях высокой динамики объекта, содержащий последовательно соединенные радиочастотный преобразователь, вход которого образует сигнальный вход приемника, и N канальный цифровой коррелятор, связанный посредством блока обмена данными с вычислителем, содержащим связанные шиной обмена данными центральный процессор, запоминающее устройство, постоянное запоминающее устройство и блок внешнего интерфейса, входы-выходы которого образуют информационные входы-выходы приемника, причем N канальный цифровой коррелятор содержит генератор временной шкалы приемника, а каждый канал цифрового коррелятора содержит входной мультиплексор GPS/ГЛОНАСС, генератор несущей, смеситель несущей, генератор кода, смеситель кода и интегратор, отличающийся тем, что дополнительно вводится устройство быстрого поиска, содержащее синхронизатор, входной мультиплексор GPS/ГЛОНАСС, генератор несущей, смеситель несущей, один вход которого соединен с выходом генератора несущей, а второй вход соединен с выходом мультиплексора GPS/ГЛОНАСС, сдвиговый регистр комплексного сигнала, вход которого соединен с выходом смесителя несущей, регистр кода, первую группу М мультиплексоров, каждый из которых имеет К входов, причем j-й вход i-го мультиплексора соединен с (j+(i-1)·K)-м разрядом сдвигового регистра комплексного сигнала, а входы управления всех мультиплексоров соединены с выходом синхронизатора, вторую группу М мультиплексоров, каждый из которых имеет К входов, причем j-й вход i-го мультиплексора соединен с (j+(i-1)·K)-м разрядом регистра кода, а входы управления всех мультиплексоров соединены с выходом синхронизатора, М смесителей кода, причем один вход i-го смесителя кода соединен с выходом i-го мультиплексора из первой группы мультиплексоров, а второй вход i-го смесителя кода соединен с выходом i-го мультиплексора из второй группы мультиплексоров, первый М-входовой сумматор, входы которого соединены с выходами смесителей кода, интегратор, вход которого соединен с выходом первого М-входового сумматора, блок формирования квадрата модуля комплексного сигнала, вход которого соединен с выходом интегратора, второй сумматор, запоминающее устройство (ОЗУ), блок формирования адреса ОЗУ, причем один вход второго сумматора соединен с выходом блока формирования квадрата модуля комплексного сигнала, а второй вход соединен с выходом ОЗУ, причем вход ОЗУ соединен с выходом второго сумматора, а вход адреса ОЗУ соединен с выходом блока формирования адреса ОЗУ, блок выбора максимума, один вход которого соединен с выходом ОЗУ, а второй вход соединен с выходом блока формирования адреса ОЗУ, и пороговое устройство, вход которого соединен с выходом блока выбора максимума, а выход соединен с входом блока обмена данными.
| US 7061972 B1, 13.06.2006 | |||
| ПРИЕМНИК СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2118054C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| US 6091785 A, 18.07.2000 | |||
| US 7002515 B2, 21.02.2006. | |||

