Изобретение относится к области авиационной техники и предназначено для определения расстояния между воздушными судами в полете.
Известны радиолокаторы обзора воздушного пространства (см. Олянюк П.В., Грачев В.В. Авиационное радиооборудование: Учебник для вузов. - М.: Транспорт, 1989, стр. 269-277), которые позволяют измерять координаты воздушных судов. Их недостаток состоит в том, что они измеряют только две координаты: наклонные дальности и азимуты воздушных судов и не определяют расстояние между воздушными судами.
Наиболее близкой к данному устройству является автоматизированная система управления воздушным движением (АС УВД) (Верещака А.И., Олянюк П.В. Авиационное оборудование: Учеб. для вузов. - М.: Транспорт, 1996. Стр. 270-272, 280-283), содержащая источники информации, аппаратуру отображения и документирования информации, вычислительный комплекс и средства связи. Источниками информации служат первичные и вторичные радиолокационные станции, автоматические радиопеленгаторы, позволяющие определять координаты х, у ВС в воздушном пространстве, контролируемом АС УВД.
Наряду с задачей определения координат АС УВД решает и задачу предотвращения столкновения ВС: выделяются ВС, следующие на одном эшелоне, и рассчитываются текущие значения расстояний между ними:
dki 2=(хi-xk)2-(yi-yk)2,
где i≠k.
Если расстояние становится меньше некоторого порогового значения, то формируется сигнал предупреждения диспетчера, призывающий обратить внимание на движение ВС, информация о которых фиксируется в соответствующих каналах сопровождения.
Недостаток этой системы состоит в том, что контролируется расстояние между ВС, следующих только на одном эшелоне - считается, что высоты полета контролируемых ВС одинаковы. Однако, если одно ВС, например, набирает высоту, снижается или выполняет какой-то другой маневр, а второе воздушное судно следует на постоянной высоте, то возможно пересечение их траекторий, то есть может произойти столкновение ВС. Для предотвращения столкновения воздушных судов необходимо вычислять и контролировать истинное расстояние между ними.
Целью изобретения является предотвращение столкновения воздушных судов и повышение безопасности полетов за счет определения истинного расстояния между воздушными судами с учетом высот их полета.
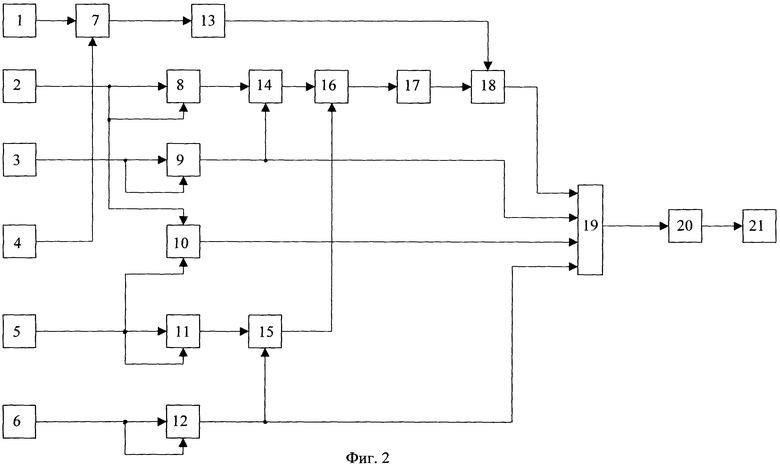
Функциональная схема устройства, определяющего истинное расстояние между воздушными судами ВС1 и ВС2 (фиг.1), представлена на фиг.2.
Устройство содержит:
1, 4 - первый и второй измерители азимутов α1, α2 воздушных судов ВС1 и ВС2 соответственно;
2, 5 - первый и второй измерители высот полета h1, h2 воздушных судов ВС1 и ВС2 соответственно;
3, 6 - первый и второй измерители наклонных дальностей d1, d2 до воздушных судов ВС1 и ВС2 соответственно;
7 - первый сумматор;
8, 9, 10, 11, 12 - первый, второй, третий, четвертый и пятый блоки умножения;
13 - блок вычисления косинуса;
14, 15 - второй и третий сумматоры;
16 - шестой блок умножения;
17 - первый блок вычисления корня квадратного;
18 - седьмой блок умножения;
19 - четвертый сумматор;
20 - второй блок вычисления корня квадратного;
21 - индикатор.
Устройство работает следующим образом.
Первый 1 и второй 4 измерители азимутов воздушных судов ВС1 и ВС2 определяют азимуты α1 и α2 соответственно. Сигнал α1, пропорциональный азимуту первого ВС1, поступает на первый вход первого сумматора 7, на второй вход которого поступает сигнал α2, пропорциональный азимуту второго ВС2. Сигнал на выходе первого сумматора 7 пропорционален разности азимутов первого ВС1 и второго ВС2: α1-α2. Этот сигнал поступает на вход блока вычисления косинуса 13, на выходе которого сигнал пропорционален cos(α1-α2). Сигнал cos(α1-α2) поступает на первый вход седьмого блока умножения 18.
Первый 2 и второй 5 измерители высот полета воздушных судов ВС1 и ВС2 определяют высоты полета h1, h2 соответственно. Сигнал h1, пропорциональный высоте полета первого ВС1, поступает на первый и второй входы первого блока умножения 8 и на первый вход третьего блока умножения 10. Сигнал, пропорциональный h1 2, с выхода первого блока умножения 8 поступает на первый вход второго сумматора 14.
Сигнал h2, пропорциональный высоте полета второго ВС2, поступает на первый и второй входы четвертого блока умножения 11 и на второй вход третьего блока умножения 10. Сигнал, пропорциональный h2 2, с выхода четвертого блока умножения 11 поступает на второй вход третьего сумматора 15.
Первый 3 и второй 6 измерители наклонных дальностей до воздушных судов ВС1 и ВС2 определяют наклонные дальности d1, d2 соответственно. Сигнал d1, пропорциональный наклонной дальности до первого ВС1, поступает на первый и второй входы второго блока умножения 9, с выхода которого сигнал, пропорциональный d1 2, поступает на второй вход второго сумматора 14 и второй вход четвертого сумматора 19.
Сигнал d2, пропорциональный наклонной дальности до второго ВС2, поступает на первый и второй входы пятого блока умножения 12, с выхода которого сигнал, пропорциональный d2 2, поступает на второй вход третьего сумматора 15 и четвертый вход четвертого сумматора 19.
На выходе второго сумматора 14 сигнал пропорционален разности квадратов наклонной дальности d1 до первого воздушного судна ВС1 и его высоты h1: d1 2-h1 2. Этот сигнал поступает на первый вход шестого блока умножения 16.
На выходе третьего сумматора 15 сигнал пропорционален разности квадратов наклонной дальности d2 до второго воздушного судна ВС2 и его высоты h2: d2 2-h2 2. Этот сигнал поступает на второй вход шестого блока умножения 16.
С выхода шестого блока умножения 16 сигнал, пропорциональный (d1 2-h1 2)(d2 2-h2 2), поступает на вход первого блока вычисления корня квадратного 17, с выхода которого сигнал, пропорциональный  поступает на второй вход седьмого блока умножения 18, на первый вход которого поступает сигнал, пропорциональный cos(α1-α2). С выхода седьмого блока усножения 18 сигнал, пропорциональный
поступает на второй вход седьмого блока умножения 18, на первый вход которого поступает сигнал, пропорциональный cos(α1-α2). С выхода седьмого блока усножения 18 сигнал, пропорциональный  поступает на первый вход четвертого сумматора 19.
поступает на первый вход четвертого сумматора 19.
На третий вход четвертого сумматора 19 поступает сигнал с выхода третьего блока умножения 10, который пропорционален произведению высоты h1 первого воздушного судна ВС1 и высоты h2 второго воздушного судна ВС2: h1h2.
На выходе четвертого сумматора 19 сигнал пропорционален квадрату расстояния между первым воздушным судном ВС1 и вторым воздушным судном ВС2:

Этот сигнал поступает на вход второго блока вычисления корня квадратного 20, с выхода которого сигнал

пропорциональный расстоянию между первым воздушным судном ВС1 и вторым воздушным судном ВС2, поступает на индикатор отображения воздушной обстановки 21 и индицируется в формуляре сопровождения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2007 |
|
RU2346293C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2006 |
|
RU2309424C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2008 |
|
RU2384858C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2009 |
|
RU2411532C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2012 |
|
RU2510800C1 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| Способ измерения пространственных диаграмм направленности антенн воздушных судов в условиях полёта | 2018 |
|
RU2692818C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1995 |
|
RU2099744C1 |
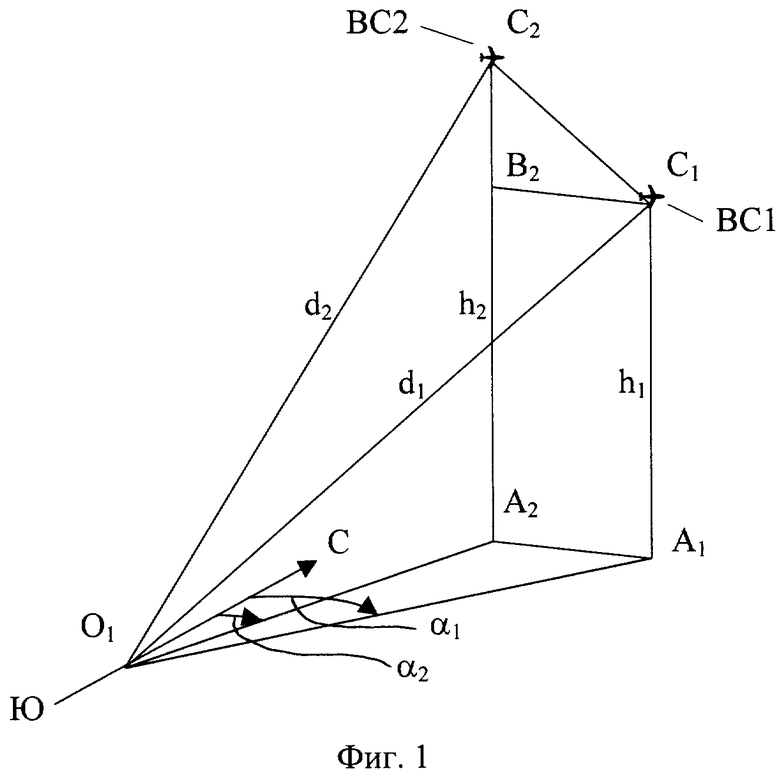
Устройство для определения расстояния между воздушными судами относится к области авиационной техники и предназначено для определения расстояния между воздушными судами. Целью изобретения является предотвращение столкновения воздушных судов и повышение безопасности полетов за счет определения истинного расстояния между воздушными судами с учетом высот их полета. Указанное расстояние определяется по формуле -  , где положение первого воздушного судна определяется азимутом α1, наклонной дальностью d1, высотой h1, а положение второго воздушного судна определяется азимутом α2, наклонной дальностью d2, высотой h2. Устройство содержит в своем составе измерители азимутов воздушных судов (1, 4), измерители высот полета воздушных судов (2, 5), измерители наклонных дальностей до воздушных судов (3, 6), сумматоры (7, 14, 15, 19), блоки умножения (8-12, 16, 18), блок вычисления косинуса (13), блоки вычисления корня квадратного (17, 20), индикатор (21). 2 ил.
, где положение первого воздушного судна определяется азимутом α1, наклонной дальностью d1, высотой h1, а положение второго воздушного судна определяется азимутом α2, наклонной дальностью d2, высотой h2. Устройство содержит в своем составе измерители азимутов воздушных судов (1, 4), измерители высот полета воздушных судов (2, 5), измерители наклонных дальностей до воздушных судов (3, 6), сумматоры (7, 14, 15, 19), блоки умножения (8-12, 16, 18), блок вычисления косинуса (13), блоки вычисления корня квадратного (17, 20), индикатор (21). 2 ил.
Устройство для определения расстояния между воздушными судами, содержащее два измерителя азимутов, два измерителя высот полета воздушных судов, два измерителя наклонных дальностей, отличающееся тем, что, с целью предотвращения столкновения воздушных судов и повышения безопасности полетов за счет определения истинного расстояния между воздушными судами, в него дополнительно введены первый сумматор, первый, второй, третий, четвертый и пятый блоки умножения, блок вычисления косинуса, второй и третий сумматоры, шестой блок умножения, первый блок вычисления корня квадратного, седьмой блок умножения, четвертый сумматор, второй блок вычисления корня квадратного и индикатор, причем выход первого измерителя азимута соединен с первым входом первого сумматора, второй вход которого соединен с выходом второго измерителя азимута, выход первого сумматора соединен с входом блока вычисления косинуса, выход блока вычисления косинуса соединен с первым входом седьмого блока умножения, выход первого измерителя высоты соединен с первым и вторым входами первого блока умножения и с первым входом третьего блока умножения, выход второго измерителя высоты соединен с первым и вторым входами четвертого блока умножения и со вторым входом третьего блока умножения, выход третьего блока умножения соединен с третьим входом четвертого сумматора, выход первого измерителя наклонной дальности соединен с первым и вторым входами второго блока умножения, выход которого соединен со вторым входом четвертого сумматора и со вторым входом второго сумматора, первый вход второго сумматора соединен с выходом первого блока умножения, выход второго сумматора соединен с первым входом шестого блока умножения, выход второго измерителя наклонной дальности соединен с первым и вторым входами пятого блока умножения, выход которого соединен с четверым входом четвертого сумматора и со вторым входом третьего сумматора, первый вход которого соединен с выходом четвертого блока умножения, выход третьего сумматора соединен со вторым входом шестого блока умножения, выход шестого блока умножения соединен со входом первого блока вычисления корня квадратного, выход которого соединен со вторым входом седьмого блока умножения, выход которого соединен с первым входом четвертого сумматора, выход четвертого сумматора соединен со входом второго блока вычисления корня квадратного, выход которого соединен со входом индикатора.
| ВЕРЕЩАКА А.И., ОЛЯНЮК П.В | |||
| Авиационное радиооборудование | |||
| М.: Транспорт, 1996, с.270-272, 280-283 | |||
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 1998 |
|
RU2134910C1 |
| Система управления воздушным движением | 1992 |
|
SU1792541A3 |
| УСТРОЙСТВО ДЛЯ ВЫБОРКИ ОРУДИЙ ЛОВА | 0 |
|
SU283723A1 |
| US 4789965, 06.12.1988 | |||
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2002 |
|
RU2232316C2 |
| Способ очистки селеносодержащих растворов от теллура | 1971 |
|
SU396071A1 |
| СОЛОВЬЕВ Ю.А | |||
| Системы спутниковой навигации | |||
| М.: Эко-Трендз, 2000, с.167-168. | |||

