Настоящая заявка испрашивает приоритет предварительной заявки США № 60/883756, озаглавленной “Структура пилот-сигнала для улучшенной упрощенной оценки канала и помех с помощью специализированных пилот-сигналов”, поданной 5 января 2007 г., переданной правообладателю настоящего изобретения и которая включена в настоящее описание посредством ссылки.
Область техники, к которой относится изобретение
Настоящее раскрытие, в общем, относится к связи и более конкретно к структуре пилот-сигнала для беспроводной системы связи.
Уровень техники
Беспроводные системы связи множественного доступа могут поддерживать множество пользователей с помощью совместного использования имеющихся радиоресурсов. Примеры таких систем множественного доступа включают в себя системы множественного доступа с кодовым разделением (CDMA), системы множественного доступа с временным разделением (TDMA), системы множественного доступа с частотным разделением (FDMA), системы с ортогональным FDMA (OFDMA) и системы FDMA с одной несущей (SC-FDMA).
Беспроводная система множественного доступа может поддерживать передачи с множественными входами и множественными выходами (MIMO) в прямой и/или обратной линии связи. В обратной линии связи (или восходящей линии связи) один или более терминалов могут отправлять передачи из множества (NT) передающих антенн в терминале (терминалах) во множество (NR) принимающих антенн в базовой станции. Канал MIMO, сформированный с помощью NT передающих антенн и NR принимающих антенн, может быть разбит на NC пространственных каналов, где NC≤min{NT, NR}. Улучшенная эффективность (например, более высокая пропускная способность и/или большая надежность) может быть достигнута с использованием пространственных каналов, сформированных с помощью множества антенн передачи и приема.
Для передачи MIMO в обратной линии связи беспроводный канал между каждым терминалом и базовой станцией обычно оценивают и используют, чтобы восстанавливать передачу данных, отправленную с помощью терминала через беспроводный канал. Оценку канала обычно выполняют с помощью отправки пилот-сигнала из каждого терминала и измерения пилот-сигнала в базовой станции. Пилот-сигнал составлен из символов, которые известны априори как терминалу, так и базовой станции. Таким образом, базовая станция может оценивать отклик канала для каждого терминала на основании пилот-символов, принятых из этого терминала, и известных пилот-символов. Поскольку передача пилот-сигнала представляет собой служебные сигналы, желательно минимизировать передачу пилот-сигнала до возможной степени. Однако передача пилот-сигнала должна быть такой, чтобы базовая станция могла получать хорошую оценку канала для каждого терминала.
Вследствие этого в данной области техники имеется потребность в способах передачи пилот-сигнал таким образом, чтобы могла быть получена хорошая оценка канала.
Раскрытие изобретения
В настоящей заявке описаны способы передачи пилот-сигнала и обработки принятого пилот-сигнала, чтобы получать оценки канала и помех. Передатчик (например, терминал) может формировать пилот-символы для первого кластера в частотно-временном блоке (или мозаичном элементе) на основании первой последовательности и может формировать пилот-символы для второго кластера в частотно-временном блоке на основании второй последовательности. Передатчик дополнительно может формировать пилот-символы для третьего кластера в частотно-временном блоке на основании первой последовательности или третьей последовательности и может формировать пилот-символы для четвертого кластера в частотно-временном блоке на основании второй последовательности или четвертой последовательности. Каждый кластер может охватывать группу пилот-символов, типично смежных друг другу в частотно-временном блоке. Первая, вторая, третья и четвертая последовательности могут включать в себя общие элементы, расположенные в разных порядках, и могут быть рассмотрены как разные варианты одной последовательности. Например, элементы во второй последовательности могут быть в обратном порядке (или обращенными) относительно элементов в первой последовательности. Передатчик может передавать пилот-символы в их соответственных кластерах в частотно-временном блоке.
Множество передатчиков могут совместно использовать частотно-временной блок, и им могут быть назначены разные последовательности, которые являются ортогональными друг к другу для каждого кластера в частотно-временном блоке. Каждый передатчик может формировать пилот-символы для каждого кластера на основании последовательности, назначенной этому передатчику для этого кластера.
Приемник (например, базовая станция) может получать принятые пилот-символы из множества кластеров в частотно-временном блоке. Приемник может формировать множество базисных векторов для передатчика, причем каждый базисный вектор формируется с помощью множества вариантов последовательности, назначенной этому передатчику. Базисный вектор является вектором элементов, используемых для обработки принятых символов. Множество вариантов последовательности могут соответствовать различным порядкам элементов в последовательности и могут быть рассмотрены как разные последовательности. Приемник может дополнительно формировать множество базисных векторов на основе конкретной модели канала, например, модели канала с линейно изменяющейся временной составляющей и линейно изменяющейся частотной составляющей. Приемник может обрабатывать принятые пилот-символы с помощью базисных векторов для получения оценки канала для передатчика. Приемник может повторять ту же самую обработку (например, формирование базисных векторов и обработку принятых пилот-символов с помощью базисных векторов) для каждого передатчика, совместно использующего частотно-временной блок. Приемник также может получать оценку шума и помех на основании принятых пилот-символов и, по меньшей мере, одного базового вектора, не использованного для оценки канала.
Различные аспекты и признаки раскрытия описаны более подробно ниже.
Краткое описание чертежей
Фиг.1 изображает блок-схему двух терминалов и базовой станции.
Фиг.2 изображает структуру мозаичного элемента.
Фиг.3А-3D изображают структуры четырех шаблонов пилот-сигнала.
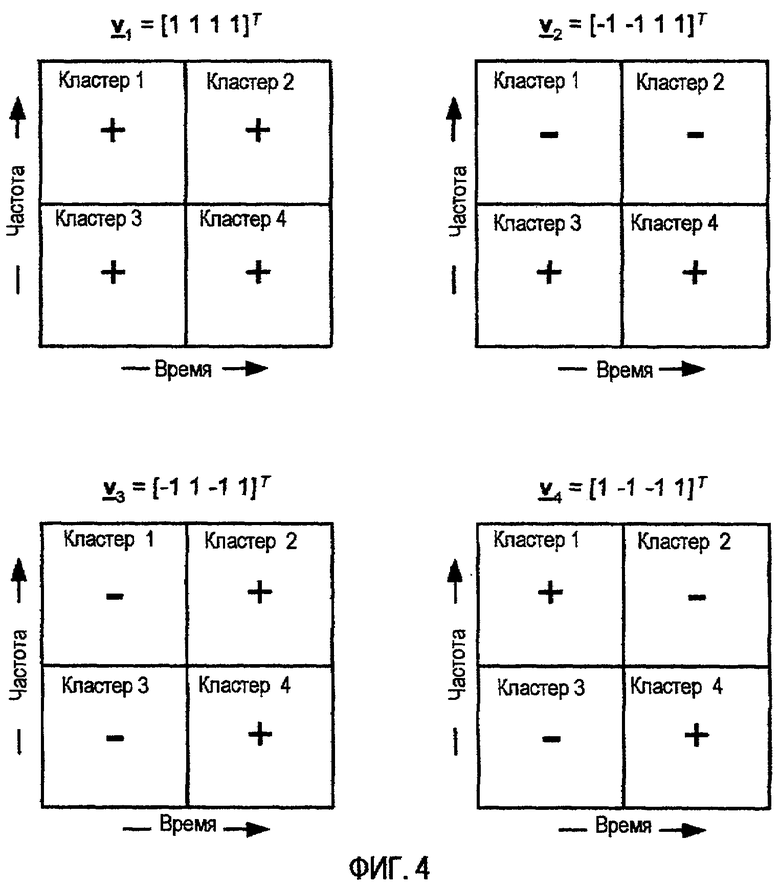
Фиг.4 иллюстрирует разные варианты объединения для четырех кластеров пилот-сигнала.
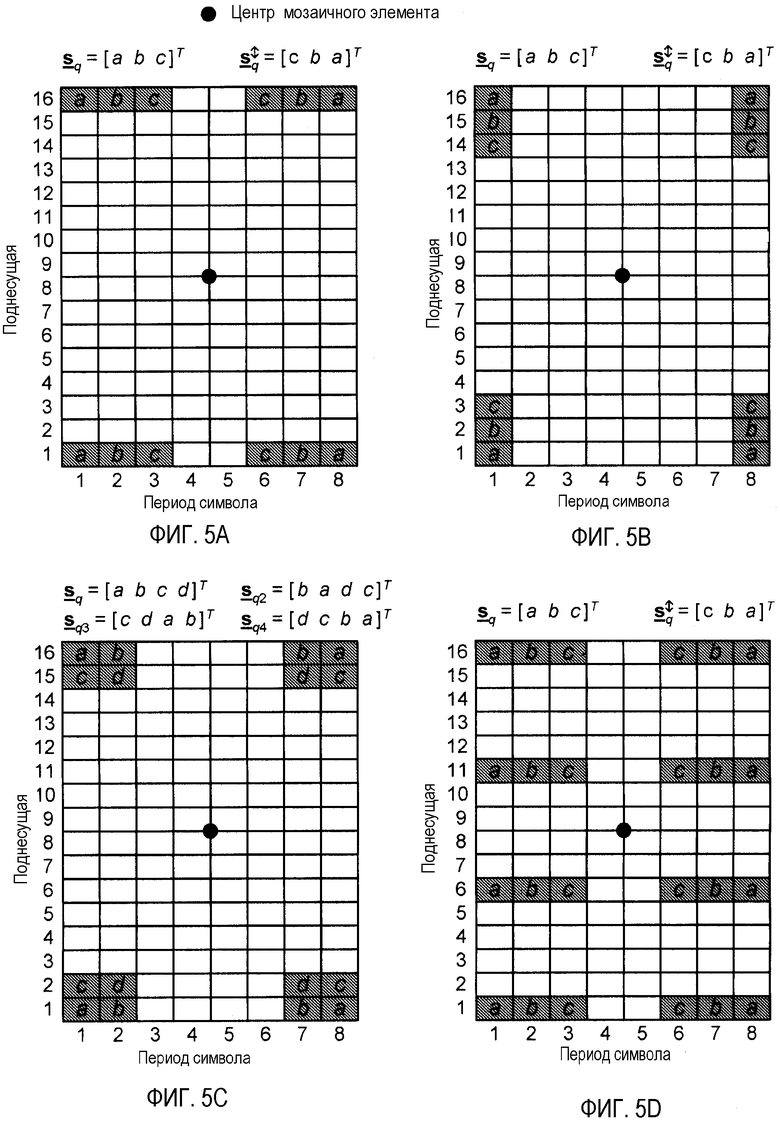
Фиг.5А-5D изображают использование множества вариантов последовательности шифрования, чтобы получать симметричные пилот-символы для четырех шаблонов пилот-сигнала, изображенных на Фиг. 3А-3D.
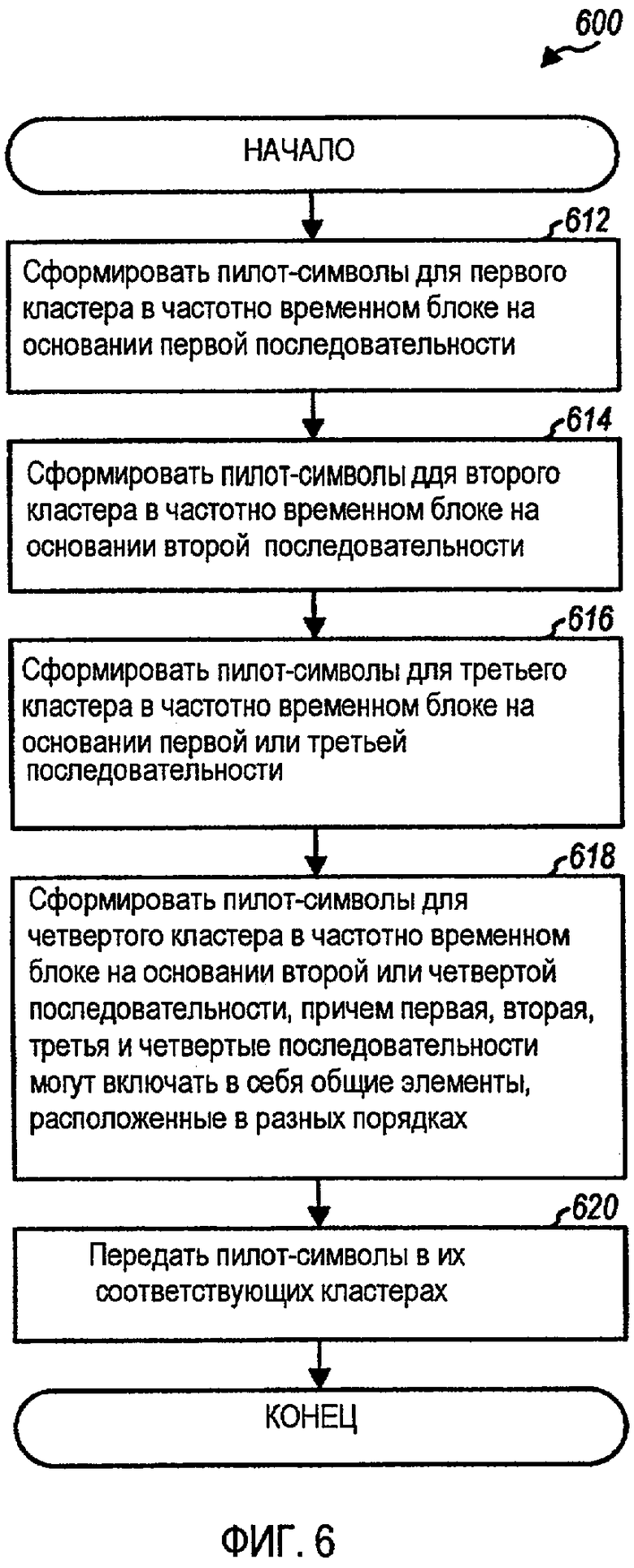
Фиг. 6 изображает процесс, выполняемый с помощью передатчика, чтобы передавать пилот-сигнал.
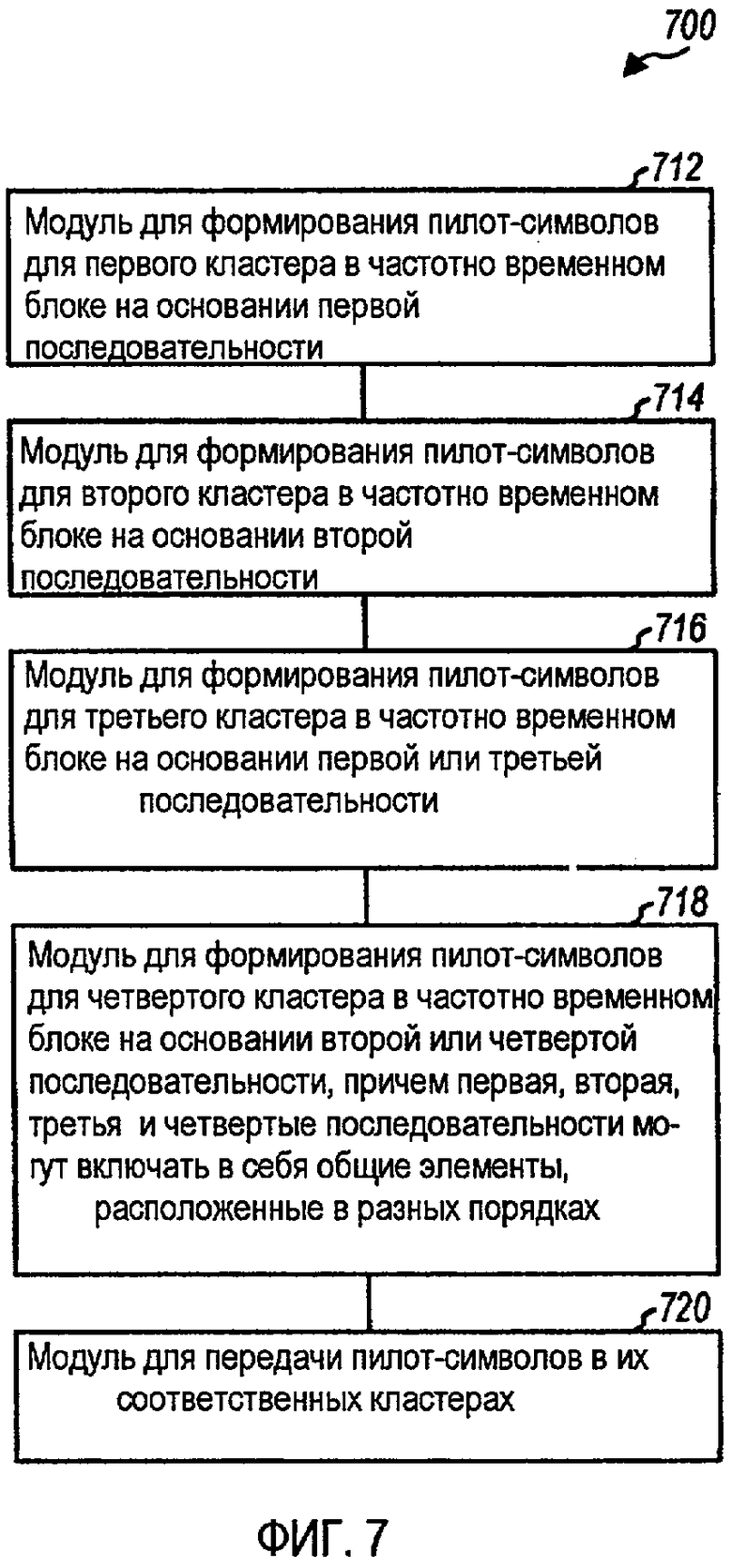
Фиг. 7 изображает устройство, предназначенное для передачи пилот-сигнала.
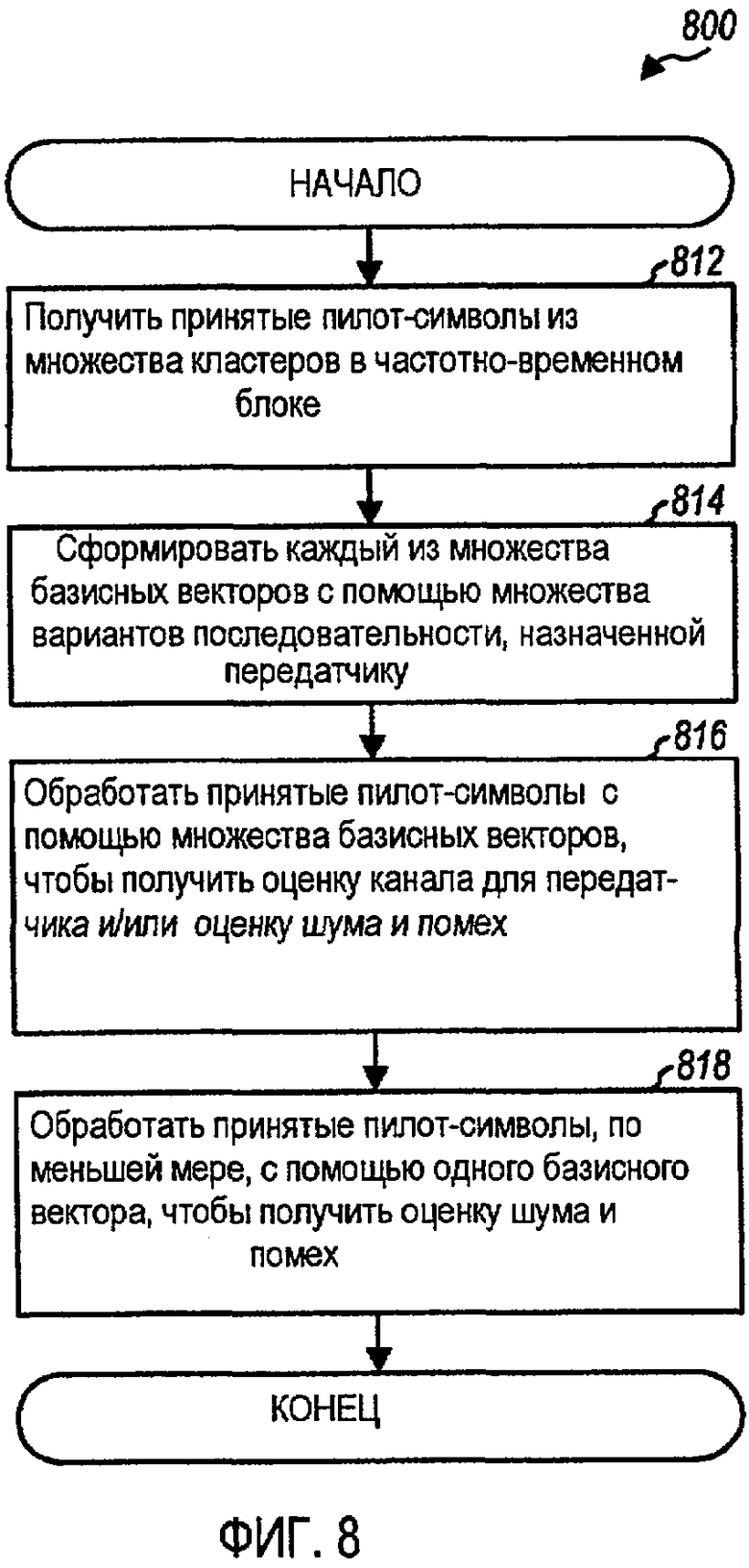
Фиг. 8 изображает процесс, выполняемый с помощью приемника, чтобы обрабатывать принятый пилот-сигнал.
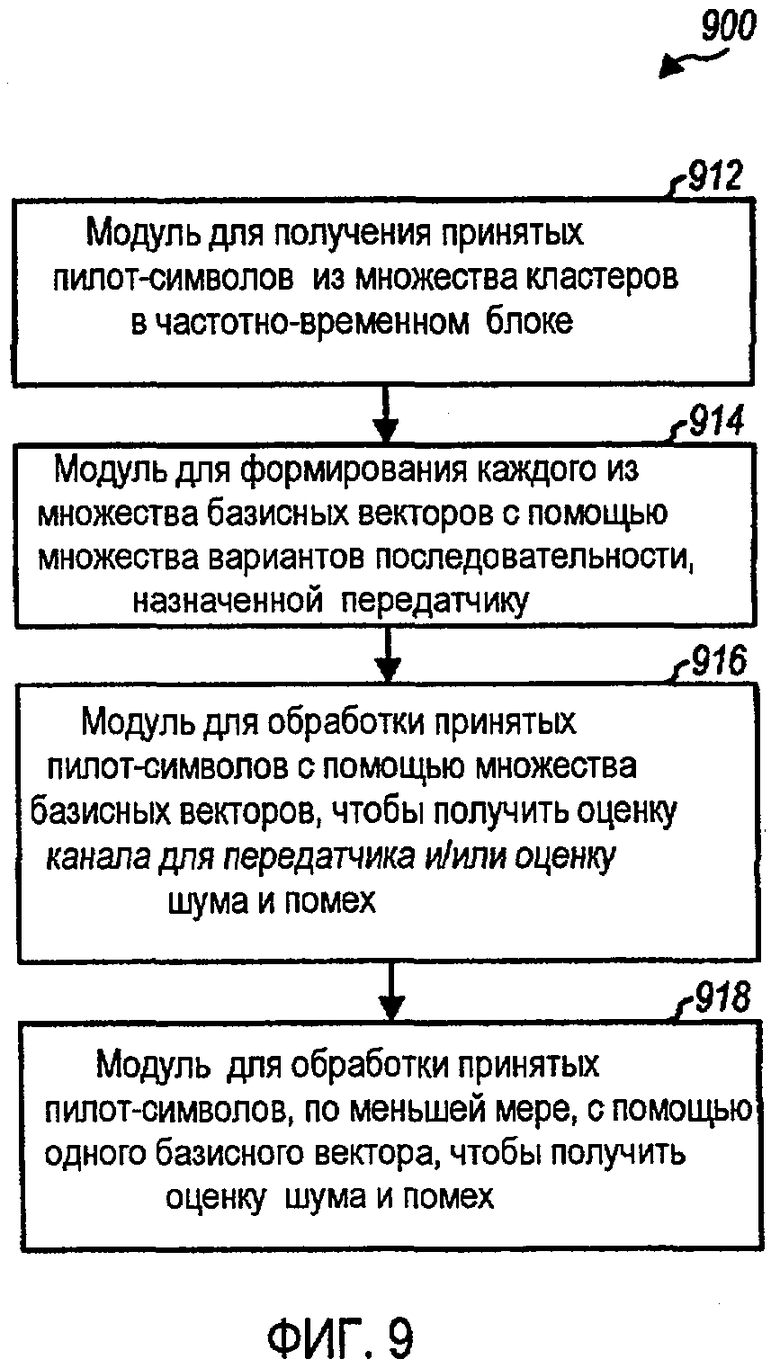
Фиг. 7 изображает устройство, предназначенное для обработки принятого пилот-сигнала.
Осуществление изобретения
Способы, описанные в настоящей заявке, могут быть использованы для различных систем связи, которые поддерживают передачу MIMO и используют мультиплексирование с частотным разделением (FDM). Например, эти способы могут быть использованы для систем, которые используют ортогональное FDM, FDM с одной несущей (SC-FDM) и т.д. OFDM и SC-FDM разделяют полосу частот системы на множество (К) ортогональных поднесущих, которые также упоминаются как тоны, элементы кодированного сигнала и т.д. Каждая поднесущая может быть модулирована с помощью данных. В общем, символы модуляции посылают в частотной области с помощью OFDM, а во временной области с помощью SC-FDM. Эти способы также могут быть использованы для передач в обратной линии связи (или восходящей линии связи), а также прямой линии связи (или нисходящей линии связи). Для пояснения способы описаны ниже для передач в обратной линии связи.
Фиг.1 изображает блок-схему конфигурации из двух терминалов 110х и 110y и базовой станции 150 в беспроводной системе связи. Терминал также может быть упомянут как пользовательское оборудование (UE), подвижная станция, терминал доступа, абонентское устройство, станция и т.д. Терминал может быть сотовым телефоном, персональным цифровым ассистентом (PDA), беспроводным устройством связи, карманным устройством, беспроводным модемом, портативным переносным компьютером, беспроводным телефоном и т.д. Базовая станция также может быть упомянута как узел В, расширенный узел В (eNodeB), точка доступа и т.д. На Фиг. 1 терминал 110х оснащен одной антенной, терминал 110y оснащен множеством антенн, а базовая станция 150 оснащена множеством антенн. Каждая антенна может быть физической антенной или антенной решеткой. Для простоты Фиг. 1 изображает только устройства обработки для передачи данных в обратной линии связи и передачи сигнализации в прямой линии связи.
В каждом терминале 110 процессор 120 данных передачи (TX) и пилот-сигнала может принимать данные трафика из источника 112 данных, обрабатывать (например, форматировать, кодировать, выполнять перемежение и преобразование символов) данные трафика и формировать символы данных. Процессор 120 также может формировать и мультиплексировать пилот-символы с символами данных. Как использовано в настоящем описании, символ данных является символом для данных, пилот-символ является символом для пилот-сигнала и символ обычно является комплексной величиной. Символы данных и пилот-символы могут быть символами модуляции из схемы модуляции, такой как PSK или QAM. Пилот-сигнал представляет собой данные, которые известны априори как терминалам, так и базовой станции.
В терминале 110y процессор 122y MIMO TX может выполнять пространственную обработку передатчика относительно символов данных и пилот-символов на основе прямого преобразования MIMO, предварительного кодирования, формирования луча и т.д. Символ данных может быть передан из одной антенны для прямого преобразования MIMO или из множества антенн для предварительного кодирования и формирования луча. Процессор 122y может подавать NY потоков выходных символов в NY модуляторов (MOD) с 130а по 130ny. В терминале 110х процессор 120х может подавать один выходной поток символов в модулятор 130х. Каждый модулятор 130 может выполнять модуляцию (например, для OFDM, SC-FDM и т.д.) относительно выходных символов, чтобы получать выходные элементарные посылки. Каждый модулятор 130 может дополнительно обрабатывать (например, преобразовывать в аналоговый вид, фильтровать, усиливать и преобразовывать с повышением частоты) свои выходные элементарные посылки, чтобы формировать сигнал обратной линии связи. В терминале 110х один сигнал обратной линии связи из модулятора 130х может быть передан из антенны 132х. В терминале 110y NY сигналов обратной линии связи из модуляторов 130а-130ny могут быть переданы через NY антенн 132а-132ny, соответственно.
В базовой станции 150 NR антенн 152а-150nr могут принимать сигналы обратной линии связи из терминалов 110х-110y и, возможно, из других терминалов. Каждая антенна 152 может подавать принятый сигнал в соответственный демодулятор (DEMOD) 154. Каждый демодулятор 154 может обрабатывать (например, фильтровать, усиливать, преобразовывать с понижением частоты и преобразовывать в цифровой вид) свой принятый сигнал, чтобы получать выборки, и может дополнительно выполнять демодуляцию (например, для OFDM, SC-FDM и т.д.) относительно выборок, чтобы получать принятые символы. Каждый демодулятор 154 может подавать принятые символы данных в процессор 162 канала. Процессор 162 канала может оценивать отклик беспроводного канала из каждого терминала 110 в базовую станцию 150, а также шум и помехи на основании принятых пилот-символов. Пространственный процессор 160 RX может выполнять детектирование MIMO относительно принятых символов данных с помощью оценок канала и оценок шума и помех из процессора 162 канала, чтобы получать оценки символов данных. Процессор 170 данных RX может обрабатывать (например, отменять перемежение и декодировать) оценки символов данных и подавать декодированные данные в приемник 172 данных.
Базовая станция 150 может посылать данные трафика и сигнализацию (например, назначения частотно-временных ресурсов) в терминалы. Сигнализация может быть обработана с помощью процессора 174 сигнализации ТХ и дополнительно обработана с помощью модуляторов 154а-154nr, чтобы формировать NR сигналов прямой линии связи, которые могут быть переданы через NR антенн 152а-152nr. В каждом терминале 110 сигналы прямой линии связи из базовой станции 150 могут быть приняты с помощью одной или более антенн 132, обработаны с помощью одного или более демодуляторов 130 и дополнительно обработаны с помощью процессора 134 сигнализации RX, чтобы восстановить сигнализацию, отправленную с помощью базовой станции 150.
Контроллеры/процессоры 140х, 140y и 180 могут управлять работой различных устройств обработки в терминалах 110х и 110y и базовой станции 150, соответственно. Памяти 142х, 142y и 182 могут запоминать данных и программные коды для терминалов 110х и 110y и базовой станции 150, соответственно. Планировщик 184 может планировать терминалы для передачи в прямой и/или обратной линии связи.
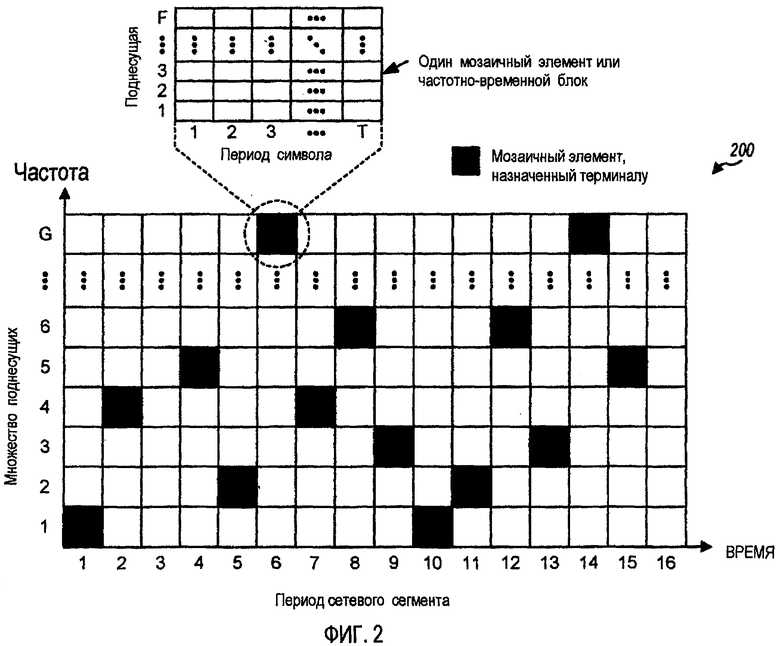
Фиг.2 изображает структуру 200 мозаичного элемента, который может быть использован для прямой и/или обратной линии связи. Частотно-временные ресурсы, доступные для данной линии связи, могут быть разделены на мозаичные элементы, которые также могут быть упомянуты как частотно-временные блоки, блоки ресурсов области сетевых сегментов и т.д. Каждый мозаичный элемент может охватывать множество (F) поднесущих в множестве (Т) периодов символов, где каждое из F и Т могут быть целыми величинами. F поднесущих в данном мозаичном элементе могут быть последовательными поднесущими или могут быть распределены по К всех поднесущих. Каждый мозаичный элемент включает в себя FT блоков ресурсов, где блок ресурсов равен одной поднесущей в одном периоде символа. FT символов модуляции могут быть отправлены в FT блоках ресурсов в каждом мозаичном элементе. Каждый мозаичный элемент может быть назначен одному или более терминалам для передачи данных.
Фиг.2 также изображает схему скачкообразной перестройки частоты, которая может быть использована для прямой и/или обратной линии связи. Скачкообразная перестройка частоты может обеспечивать разнесение частоты против вредных эффектов на трассе распространения и рандомизацию помех. С помощью скачкообразной перестройки частоты терминалу могут быть назначены мозаичные элементы в разных частях полосы частот системы в разных периодах скачкообразного изменения. Период скачкообразного изменения является продолжительностью времени одного мозаичного элемента и охватывает Т периодов символов.
Данные и пилот-сигнал могут передаваться различным образом в мозаичном элементе. В одной схеме данные и пилот-символы передаются в разных блоках ресурсов. Пилот-символы также могут передаваться на основе шаблона пилот-сигнала, который указывает конкретные блоки ресурсов, чтобы использовать для пилот-символов. Обычно шаблон пилот-сигнала может включать в себя любое число пилот-символов, и пилот-символы могут быть расположены в любом месте в мозаичном элементе. Число пилот-символов может быть выбрано на основании компромисса между непроизводительными затратами пилот-сигнала и эффективностью оценки канала. Расположение пилот-символов по частоте может быть выбрано на основании ожидаемого расширения задержки беспроводного канала. Меньшее частотное разнесение между пилот-символами может использоваться с учетом большого расширения задержек. Разнесение пилот-символов по времени может быть выбрано на основании ожидаемого доплеровского расширения беспроводного канала. Меньшее временное разнесение между пилот-символами может быть использовано, чтобы оперировать с большим доплеровским расширением.
Пилот-символы также могут быть размещены таким образом, чтобы поддерживать способы пространственного мультиплексирования, такие как MIMO и/или множественный доступ с пространственным разделением каналов (SDMA). С помощью пространственного мультиплексирования множество потоков данных могут быть переданы одновременно через множество пространственных каналов или уровней, сформированных с помощью множества антенн передачи и множества антенн приема. Чтобы поддерживать пространственное мультиплексирование, пилот-символы могут быть расположены в кластерах в мозаичном элементе. Число пилот-символов (М) в каждом кластере может быть больше или равно поддерживаемому пространственному рангу. Пространственный ранг относится к числу пространственных каналов и, следовательно, к числу потоков данных, которые могут быть переданы параллельно. Пилот-символы в каждом кластере могут занимать непрерывную область во времени и частоте, таким образом, что для каждого терминала изменения беспроводного канала по пилот-символам в одном кластере являются как можно малыми.
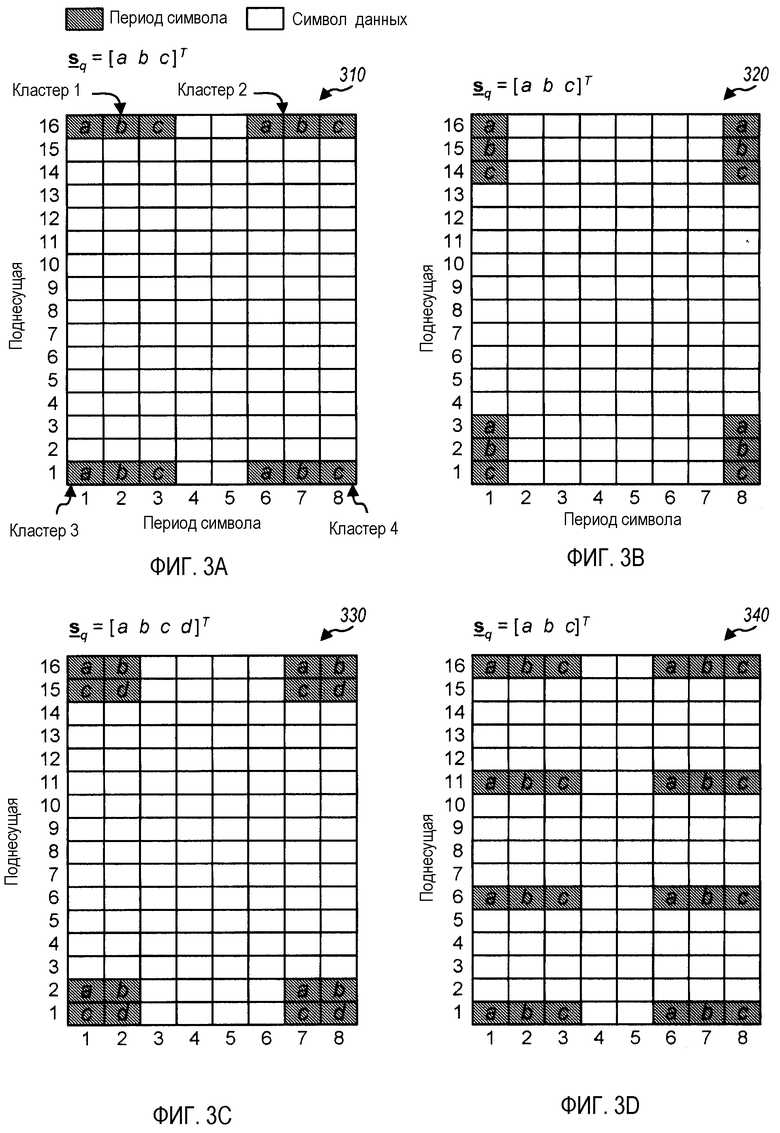
Фиг.3А изображает структуру шаблона 310 пилот-сигнала для мозаичного элемента 16×8, который охватывает F=16 поднесущих в Т=8 периодах символов. В этой структуре мозаичный элемент включает в себя 12 пилот-символов, которые расположены в четырех кластерах, расположенных в четырех углах мозаичного элемента. Четырем кластерам могут быть даны индексы 1, 2, 3 и 4, как изображено на Фиг. 3А. Каждый кластер включает в себя М=3 пилот-символов, посылаемых в одной поднесущей в трех последовательных периодах символов. Три пилот-символа в каждом кластере могут быть использованы для оценки канала для пространственных каналов количеством до трех.
Фиг.3В изображает структуру шаблона 32 пилот-сигнала для мозаичного элемента 16×8. В этой структуре мозаичный элемент включает в себя 12 пилот-символов, которые расположены в четырех кластерах, расположенных в четырех углах мозаичного элемента. Каждый кластер включает в себя М=3 пилот-символов, посылаемых в трех поднесущих в одном периоде символа. Три пилот-символа в каждом кластере могут быть использованы для оценки канала для пространственных каналов количеством до трех.
Фиг.3С изображает структуру шаблона 330 для мозаичного элемента 16×8. В этой структуре мозаичный элемент включает в себя 16 пилот-символов, которые расположены в четырех кластерах, расположенных в четырех углах мозаичного элемента. Каждый кластер включает в себя М=4 пилот-символов, посылаемых в двух поднесущих в двух последовательных периодах символов. Четыре пилот-символа в каждом кластере могут быть использованы для оценки канала для пространственных каналов количеством до четырех.
Фиг.3D изображает структуру шаблона 340 пилот-сигнала для мозаичного элемента 16×8. В этой структуре мозаичный элемент включает в себя 24 пилот-символа, которые расположены в восьми кластерах, расположенных в четырех углах мозаичного элемента. Каждый кластер включает в себя М=4 пилот-символов, посылаемых в двух поднесущих в двух последовательных периодах символов. Четыре пилот-символа в каждом кластере могут быть использованы для оценки канала для пространственных каналов количеством до четырех.
Фиг.3А по Фиг. 3D изображают четыре примера шаблонов пилот-сигнала. Также могут быть определены различные другие шаблоны пилот-сигнала. Обычно шаблон пилот-сигнала может включать в себя любое число кластеров, а каждый кластер может включать в себя любое число пилот-символов. Кроме того, кластеры и пилот-символы могут быть расположены любым способом в мозаичном элементе. Для пояснения большая часть описания, приведенного ниже, допускает использование шаблонов 310 пилот-сигнала на Фиг. 3А.
В общем, один или более терминалов могут совместно использовать данный мозаичный элемент. Если мозаичный элемент имеет кластеры из М пилот-символов, тогда до М потоков данных могут быть переданы в пространственных каналах или уровнях количеством до М. Терминал с одной антенной (например, терминал 110х на Фиг. 1) может передавать один поток данных в одном пространственном канале. Терминал с множеством антенн (например, терминал 110y на Фиг. 1) может передавать множество потоков данных во множестве пространственных каналов.
Для пояснения большая часть следующего описания допускает, что Q терминалов совместно используют данный мозаичный элемент, где 1<Q<M, и что каждый терминал передает один поток данных в одном пространственном канале. Обработка для этого мозаичного элемента описана ниже.
Базовая станция может получать FT принятых символов из мозаичного элемента для Q терминалов. Принятые символы могут быть выражены как:
 Уравнение 1
Уравнение 1
где z q - вектор FT×1 символов модуляции, переданных с помощью терминала q в FT блоках ресурсов в мозаичном элементе,
h q - вектор FT×1 комплексных коэффициентов усиления каналов для FT блоков ресурсов в мозаичном элементе для терминала q,
Δ2 q - скалярная величина для смещения мощности для терминала q,
y - вектор FT×1 принятых символов для FT блоков ресурсов в мозаичном элементе,
n 0 - вектор FT×1 шума и помех для мозаичного элемента и
“°” обозначает поэлементное умножение.
В уравнении 1 первые F элементов каждого вектора соответствуют F поднесущим в первом периоде символа мозаичного элемента, следующие F элементов соответствуют F поднесущим во втором периоде символа и т.д. и последние F элементов соответствуют F поднесущим в последнем периоде символа. h q содержит комплексные коэффициенты усиления частотной области для терминала q, которые могут быть допущены как комплексная гауссова случайная переменная с нулевым средним значением и матрицей ковариации. Коэффициенты усиления каналов могут быть допущены как независимые среди Q терминалов. Для простоты шум и помехи n 0 могут быть допущены как аддитивный белый гауссовский шум (AWGN) с нулевым вектором среднего значения и матрицей ковариации σ2 I , где σ2 - изменение шума и помех, а I - матрица тождественности.
Базовая станция может оценивать коэффициенты усиления каналов для каждого терминала, а также шум и помехи на основании принятых пилот-символов. Базовая станция может выполнять оценку канала на основании допущения, что статистические характеристики беспроводного канала для каждого терминала являются известными, и что коэффициенты усиления по мозаичному элементу для каждого терминала являются коррелированными.
Матрица ковариации для каждого терминала q, где q∈{1, …, Q}, может быть аппроксимирована следующим образом:
 Уравнение 2
Уравнение 2
где u i - i-ый аппроксимирующий собственный вектор для канала для терминала q,
λi,q - i-ый собственный вектор для канала для терминала q,
E {} - обозначает операцию математического ожидания и
“H” - обозначает эрмитово или комплексное транспонирование.
Уравнение 2 основано на наблюдении, что для случаев, представляющих практический интерес, матрица ковариации терминала имеет максимум три существенных собственных вектора и может быть аппроксимирована с помощью трех собственных векторов u 1, u 2 и u 3 . Эти три аппроксимирующих вектора имеют размерность FT×1 и могут быть использованы вместо фактических собственных векторов для оценки канала для терминала q по мозаичному элементу. Кроме того, для случаев, представляющих практический интерес, первый собственный вектор λ1,q обычно, по меньшей мере, порядка величины, большей, чем другие два собственных вектора λ2,q и λ3,q.
Три аппроксимирующих собственных вектора могут быть выражены как:
Для вектора n×1 a n×1=[a1,a2,…,an]T и вектора m×1 b mx1=[b1,b2,…,bm]T, где “T” обозначает транспонирование, произведение Кронекера c mn×1= a n×1 b m×1 может быть дано как:
c mn×1 - вектор mn×1, содержащий произведение каждого элемента a n×1 с каждым элементом b m×1.
В уравнении 3 u F,0 - вектор всех единиц, масштабированных с помощью константы, чтобы достичь мощности блока для u F,0. u F,1 - вектор со значениями от -(F-1) до (F-1) на этапах 2, масштабированный с помощью константы, чтобы достичь мощности блока для u F,1. u F,1 изменяется линейно по F поднесущим мозаичного элемента. u T,0 - вектор всех единиц, масштабированный с помощью константы, чтобы достичь мощности блока для u T,0. u T,1 - вектор со значениями от -(Т-1) до (Т-1) на этапах 2, масштабированный с помощью константы, чтобы достичь мощности блока для u T,1. u T,1 изменяется линейно по Т поднесущим мозаичного элемента.
u 1 - вектор FT×1 всех единиц, масштабированный с помощью константы, чтобы достичь мощности блока для u 1. u 2 - вектор FT×1, содержащий Т последовательностей из F элементов в u F,1, масштабированный с помощью константы, чтобы достичь мощности блока для u 2. u 3 - вектор FT×1, содержащий F повторений каждого из Т элементов в u T,1, масштабированный с помощью константы, чтобы достичь мощности блока для u 3. u 1 - модель постоянного или среднего компонента. u 2 - модель изменения канала по частоте. u 3 - модель изменения канала во времени.
Отклик канала для каждого терминала q по мозаичному элементу может быть смоделирован как случайная функция частоты и времени (f,t). Эта функция может быть аппроксимирована с помощью первых трех членов расширения ряда Тейлора следующим образом:
 Уравнение 4
Уравнение 4
В уравнении 4 2-мерную (2В) функцию ξq(ƒ, t ) аппроксимируют с помощью (i) первого члена для значения ξq(ƒ, t ) в начальной точке или ξq(ƒ0, t 0), (ii) второго члена для линейной функции по частоте или SF,q(f-f0) и (iii) третьего члена для линейной функции во времени или ST,q(t-t0). Углы наклона SF,q и ST,q линейных функций по частоте и во времени определяют с помощью угла наклона ξq(ƒ, t ) относительно частоты и времени, соответственно, в начальной точке.
На основании модели канала, показанной в уравнении 4, отклик канала терминала q может быть выражен как:
 Уравнение 5
Уравнение 5
где αq - средний коэффициент усиления канала, который соответствует члену ξq(ƒ0, t 0),
β F,q - угол наклона линейной функции по частоте для терминала q,
β T,q - угол наклона линейной функции во времени для терминала q и
h q (n ƒ ,n t )- 2D функция для отклика канала терминала q.
Как показано в уравнении 5, отклик канала q по мозаичному элементу может быть описан с помощью трех параметров αq, βF,q и βT,q. Центр мозаичного элемента может быть задан как (nf0, nt0), где nf0=(F+1)/2, а nt0=(Т+1)/2. Отклик канала для символа в дискретных координатах (nf,nt) может быть получен, как показано в уравнении 5.
Шаблон пилот-сигнала может включать в себя Р всех пилот-символов, которые могут быть расположены в четырех кластерах, причем каждый кластер включает в себя М пилот-символов, таким образом, что Р=4М. Пилот-символы могут быть размещены в местоположениях, которые симметричны относительно центра мозаичного элемента, например, как изображено на Фиг. 3А-3D. Если каждый терминал передает один поток данных в одном пространственном канале, тогда число терминалов, которые могут совместно использовать мозаичный элемент ограничено М или Q≤M.
Q терминалов могут совместно использовать кластер, и каждый из Q терминалов может одновременно передавать М пилот-символов в этом кластере. Каждый терминал может скремблировать или расширять свои пилот-символы с помощью скремблирующей последовательности, назначенной этому терминалу. Скремблирующие последовательности для Q терминалов могут быть обозначены как s q для q=1,…,Q и должны быть ортогональным друг к другу. Скремблирующие последовательности также могут быть упомянуты как расширяющие последовательности, ортогональные последовательности, пилот-последовательности, последовательности и т.д. Скремблирующие последовательности могут иметь единичные модульные элементы и должны быть длины М. В одной схеме М скремблирующих последовательностей определяют на основании М столбцов матрицы Фурье М×М, причем каждая скремблирующая последовательность содержит М элементов одного столбца матрицы Фурье. Элемент в n-ой строке и m-ом столбце матрицы Фурье М×М может быть задан как e -j2π·n·m/M для n=0,…,M-1 и m=0, …, M-1. М скремблирующих последовательностей также могут быть определены другими способами. В любом случае Q скремблирующих последовательностей могут быть выбраны из М имеющихся скремблирующих последовательностей. В одной схеме каждому терминалу назначают одну скремблирующую последовательность и используют ту же самую скремблирующую последовательность для всех кластеров в мозаичном элементе. В другой схеме каждый терминал может использовать разные скремблирующие последовательности для разных кластеров в мозаичном элементе.
Пилот-символы, переданные с помощью терминала q в мозаичном элементе, могут быть выражены как
 Уравнение 6
Уравнение 6
где 1 4×1 - вектор 4×1 из всех единиц и
r 1,q- вектор Р×1 пилот-символов, переданных с помощью терминала q в мозаичном элементе.
Первые М элементов из r 1,q предназначены для пилот-символов, отправленных в кластере 1 в верхнем левом углу мозаичного элемента, следующие М элементов предназначены для пилот-символов, отправленных в кластере 2 в верхнем правом углу мозаичного элемента, следующие М элементов предназначены для пилот-символов, отправленных в кластере 3 в нижнем левом углу мозаичного элемента и последние М элементов предназначены для пилот-символов, отправленных в кластере 4 в нижнем правом углу мозаичного элемента. Векторы r 1,q пилот-сигнала для терминалов с 1 по Q являются ортогональными.
Фиг.3А изображает переданные пилот-символы для шаблона 310 пилот-сигнала со скремблирующей последовательностью s q=[a b с]T, где a, b и с являются тремя элементами скремблирующей последовательности и могут имеет комплексные значения. Три элемента a, b и с в s q применяют к трем пилот-символам слева направо в каждом кластере в мозаичном элементе.
Фиг.3В изображает переданные пилот-символы для шаблона 320 пилот-сигнала со скремблирующей последовательностью s q=[a b с]T. Три элемента a, b и с в s q применяют к трем пилот-символам сверху вниз в каждом кластере в мозаичном элементе.
Фиг.3С изображает переданные пилот-символы для шаблона 330 пилот-сигнала со скремблирующей последовательностью s q=[a b с]T. Четыре элемента a, b, с и d в s q применяют к четырем пилот-символам в z-шаблоне в каждом кластере в мозаичном элементе.
Фиг.3D изображает переданные пилот-символы для шаблона 340 пилот-сигнала со скремблирующей последовательностью s q=[a b с]T. Три элемента a, b и с в s q применяют к трем пилот-символам слева направо в каждом кластере в мозаичном элементе.
Множество базисных векторов может быть определено для каждого терминала q следующим образом:
Фиг.4 иллюстрирует векторы v 1 по v 4. Четыре вектора v 1 по v 4 имеют разные комбинации знаков для четырех кластеров в мозаичном элементе и представляют разные варианты объединения для пилот-символов, принятых в четырех кластерах, как описано ниже.
Каждый терминал q связан с множеством из четырех базисных векторов Р×1 r 1,q, r 2,q, r 3,q и r 4,q. r 1,q содержит переданные пилот-символы. r 2,q формируют с помощью v 2 и используют, чтобы обнаруживать изменение канала по частоте. r 3,q формируют с помощью v 3 и используют, чтобы обнаруживать изменение канала во времени. r 4,q формируют с помощью v 2 и могут использовать для оценки шума и помех.
Если число степеней свободы каналов для Q терминалов, совместно использующих мозаичный элемент, меньше, чем полное число пилот-смиволов в мозаичном элементе, тогда пилот-символы неиспользованные, чтобы оценивать параметры каналов, могут быть использованы, чтобы оценивать мощность шума и помех в мозаичном элементе. Пространство наблюдения имеет Р размеров, соответствующих Р полному числу пилот-символов в мозаичном элементе. В схеме, описанной выше, канал каждого терминала может быть описан с помощью трех параметров, и 3Q размеров могут быть использованы, чтобы оценивать параметры канала для всех Q терминалов. Остальные Р - 3Q размеров пространства наблюдения могут быть использованы, чтобы оценивать мощность шума и помех.
Шум и помехи могут быть оценены как мощность проекции принятого сигнала на размеры, не занятые пилот-сигналами, переданным с помощью Q терминалов. Принятый сигнал может быть спроецирован на базисные векторы для всех М имеющихся скремблирующих последовательностей следующим образом:
 Уравнение 8
Уравнение 8
где x - вектор Р×1 с Р принятыми пилот-символами в мозаичном элементе, а
w i,q - результат проецирования принятого вектора x на базисный вектор r i,q.
Для каждого терминала q уравнение 8 фактически сжимает М принятых пилот-символов в каждом кластере с помощью скремблирующей последовательности s q для этого терминала q. Уравнение 8 дополнительно накапливает четыре сжатых результата для четырех кластеров разными способами для разных базисных векторов. Ссылаясь на Фиг.4, для r 1,q результаты сжатия для четырех кластеров суммируют, чтобы получить w 1,q, который указывает средний коэффициент усиления канала для терминала q. Для r 2,q результаты сжатия для двух верхних кластеров вычитают из результатов сжатия для двух нижних кластеров, чтобы получить w 2,q, который указывает изменение канала по частоте для терминала q. Для r 3,q результаты сжатия для двух левых кластеров вычитают из результатов сжатия двух правых кластеров, чтобы получить w 3,q, который указывает изменение канала во времени для терминала q. Для r 4,q результаты сжатия для верхнего правого и нижнего левого кластеров вычитают из результатов сжатия для верхнего левого и нижнего правого кластеров, чтобы получить w 4,q .
Мощность шума и помех может быть оценена следующим образом:
 Уравнение 9
Уравнение 9
где  - оцененная мощность шума и помех.
- оцененная мощность шума и помех.
В уравнении 9 первое суммирование захватывает мощность проекции х на r 4,q, который не используют для оценки канала для любого терминала. Первое суммирование может быть использовано в качестве оценки мощности шума и помех, но может включать в себя погрешность моделирования канала, если канал каждого терминала не изменяется линейно по мозаичному элементу. Двойное суммирование захватывает мощность проекции х на r i,q, сгенерированного с помощью скремблирующих последовательностей, не использованных любым из Q терминалов. Двойное суммирование присутствует, если Q<M.
Оценка канала может быть получена для каждого терминала q на основании критерия минимальной среднеквадратичной ошибки (MMSE) следующим образом:
 Уравнение 10
Уравнение 10
где  - вектор FTx1 для оценки канала для терминала q. - оценка в уравнении 1.
- вектор FTx1 для оценки канала для терминала q. - оценка в уравнении 1.
С использованием модели канала, показанной в уравнении 2, оценка канала для каждого терминала q может быть выражена как:
θT и θF идентифицируют центр кластеров пилот-сигнала в мозаичном элементе и, следовательно, зависят от размещения пилот-символов в мозаичном элементе. Центр верхнего левого кластера может быть задан как  . Например, θF=1, если пилот-символы размещены в самом верхнем ряду мозаичного элемента. θF=3, если пилот-символы размещены во втором самом верхнем ряду мозаичного элемента и т.д.
. Например, θF=1, если пилот-символы размещены в самом верхнем ряду мозаичного элемента. θF=3, если пилот-символы размещены во втором самом верхнем ряду мозаичного элемента и т.д.
В уравнении 11 оценка канала для терминала q может быть получена на основании суммы взвешенных векторов, где
u
1,
u
2 и
u
3 определены в уравнении 3. Вес для
u
i определяют с помощью параметра ρi, собственного вектора λi,q, смещения мощности Δ2 q, оценки шума и помех и результата
w
i,q проецирования. Собственные векторы λi,q могут быть оценены любым способом, известным в данной области техники.
Допущение, использованное при получении оценки канала, заключается в том, что канал каждого терминала является постоянным для M пилот-символов в каждом кластере. Если канал изменяется по М пилот-символам в каждом кластере, то дескремблирование/сжатие может иметь остаточные погрешности, что может ухудшить оценку канала.
Чтобы понять действия погрешностей сжатия, уравнение 8 может быть расширено следующим образом:
 Уравнение 12
Уравнение 12
где  - вектор Р×1 комплексных коэффициентов усиления канала для терминала k для Р пилот-символов, а
- вектор Р×1 комплексных коэффициентов усиления канала для терминала k для Р пилот-символов, а  - вектор Рх1 шума и помех для Р пилот-символов. содержит Р элементов в
h
k для Р пилот-символов, и содержит Р элементов в
n
0 для Р пилот-символов.
- вектор Рх1 шума и помех для Р пилот-символов. содержит Р элементов в
h
k для Р пилот-символов, и содержит Р элементов в
n
0 для Р пилот-символов.
Как показано в уравнении 12, результат w i,q проецирования для терминала q включает в себя компонент из терминала q, а также вклады из других терминалов и шум. Вклад ni,q,k из другого терминала k в результат w i,q проецирования для терминала q может быть выражен как:
 Уравнение 13
Уравнение 13
Если сжатие является точным, тогда ni,q,k=0 для всех других терминалов, и никакие вклады из других терминалов не появляются в результате w i,q проецирования для терминала q. Однако вклады из других терминалов являются ненулевыми, когда их каналы не изменяются по М пилот-символам в кластере.
На основании модели канала в уравнении 5 отклик канала каждого терминала k может быть выражен как:
 Уравнение 14
Уравнение 14
Для шаблона пилот-сигнала, изображенного на Фиг. 3А, v T может быть задан как:
 Уравнение 15
Уравнение 15
Объединяя уравнения 6 и 14, член  может быть выражен как:
может быть выражен как:
Тогда вклад из терминала k может быть выражен как:
 Уравнение 17
Уравнение 17
Скремблирующие последовательности для Q терминалов являются ортогональными, таким образом, что:
 Уравнение 18
Уравнение 18
Уравнение 18 указывает, что скалярное произведение s q и s k равно 1,0, когда q=k, и равно 0,0 в противном случае.
Векторы v 1 по v 4 также являются ортогональными, таким образом, что:
 Уравнение 19
Уравнение 19
Тогда уравнение 17 может быть упрощено следующим образом:
 Уравнение 20
Уравнение 20
Уравнение 20 указывает, что для терминала q изменение времени в канале другого терминала k вносит погрешность или смещение ni,q,k в результат проецирования для терминала q. Эта погрешность возникает вследствие того факта, что  , если k≠q.
, если k≠q.
Чтобы уменьшить вклады погрешности из других терминалов, скремблирующая последовательность для терминала q может быть применена симметричным способом относительно центра мозаичного элемента. Для шаблона пилот-сигнала, изображенного на Фиг. 3А, обращенная скремблирующая последовательность  длины 3 может быть определена для терминала q следующим образом:
длины 3 может быть определена для терминала q следующим образом:
 Уравнение 21
Уравнение 21
Если каждый кластер включает в себя М=3 пилот-символов, тогда исходная и обращенная скремблирующие последовательности для терминала q могут быть заданы как:
 исходная скремблирующая последовательность и
исходная скремблирующая последовательность и
 обращенная скремблирующая последовательность. Уравнение 22
обращенная скремблирующая последовательность. Уравнение 22
Исходная скремблирующая последовательность может быть использована для двух кластеров слева от центра мозаичного элемента, а обращенная скремблирующая последовательность может быть использована для двух кластеров справа от центра мозаичного элемента. Исходная и обращенная скремблирующие последовательности также могут быть рассмотрены как два варианта одной и той же скремблирующей последовательности.
Фиг.5А изображает использование исходной и обращенной скремблирующих последовательностей для шаблона пилот-сигнала, изображенного на Фиг. 3А. В этом примере элементы a, b и с в исходной скремблирующей последовательности s q применяют к трем пилот-символам слева направо в каждом кластере слева от центра мозаичного элемента. Элементы с, b и a в обращенной скремблирующей последовательности s q применяют к трем пилот-символам слева направо в каждом кластере справа от центра мозаичного элемента. Пилот-символы являются симметричными относительно центра мозаичного элемента. Эта симметрия пилот-сигнала уменьшает погрешность при оценке канала для терминала q.
Фиг.5В изображает использование исходной и обращенной скремблирующих последовательностей для шаблона пилот-сигнала, изображенного на Фиг. 3В. В этом примере элементы a, b и с в исходной скремблирующей последовательности
s
q применяют к трем пилот-символам сверху вниз в каждом кластере выше центра мозаичного элемента. Элементы с, b и a в обращенной скремблирующей последовательности  применяют к трем пилот-символам сверху вниз в каждом кластере ниже центра мозаичного элемента. Пилот-символы являются симметричными относительно центра мозаичного элемента.
применяют к трем пилот-символам сверху вниз в каждом кластере ниже центра мозаичного элемента. Пилот-символы являются симметричными относительно центра мозаичного элемента.
Фиг.5С изображает использование четырех вариантов скремблирующей последовательности для шаблона пилот-сигнала, изображенного на Фиг. 3С. В этом примере каждый кластер включает в себя M=4 пилот-символа, и четыре варианта скремблирующей последовательности могут быть заданы как:
 первый вариант скремблирующей последовательности,
первый вариант скремблирующей последовательности,
 второй вариант скремблирующей последовательности,
второй вариант скремблирующей последовательности,
 третий вариант скремблирующей последовательности
третий вариант скремблирующей последовательности
 четвертый вариант скремблирующей последовательности
четвертый вариант скремблирующей последовательности
Уравнение 23
Элементы a, b, с и d в первом варианте скремблирующей последовательности s q применяют к четырем пилот-символам в z-шаблоне в верхнем левом кластере. Элементы b, a, d и с во втором варианте скремблирующей последовательности s q применяют к четырем пилот-символам в z-шаблоне в верхнем правом кластере. Элементы с, d, a и b в третьем варианте скремблирующей последовательности s q3 применяют к четырем пилот-символам в z-шаблоне в нижнем левом кластере. Элементы d, с, b и a в четвертом варианте скремблирующей последовательности s q применяют к четырем пилот-символам в z-шаблоне в нижнем правом кластере. Пилот-символы являются симметричными относительно центра мозаичного элемента.
Фиг.5D изображает использование исходной и обращенной скремблирующих последовательностей для шаблона пилот-сигнала, изображенного на Фиг. 3D. В этом примере элементы a, b и с в исходной скремблирующей последовательности
s
q применяют к трем пилот-символам слева направо в каждом кластере слева от центра мозаичного элемента. Элементы с, b и a в обращенной скремблирующей последовательности применяют к трем пилот-символам слева направо в каждом кластере справа от центра мозаичного элемента. Пилот-символы являются симметричными относительно центра мозаичного элемента.
Фиг.5А-5В изображают четыре примера, в которых множество вариантов скремблирующей последовательности используют, чтобы получить пилот-символы, которые являются симметричными относительно центра мозаичного элемента. Обычно любое число вариантов скремблирующей последовательности может быть использовано, чтобы получить симметричные пилот-символы, в зависимости от того, как определен кластер. Все варианты скремблирующей последовательности могут иметь одни и те же элементы, но эти элементы могут быть расположены в разных порядках в разных вариантах.
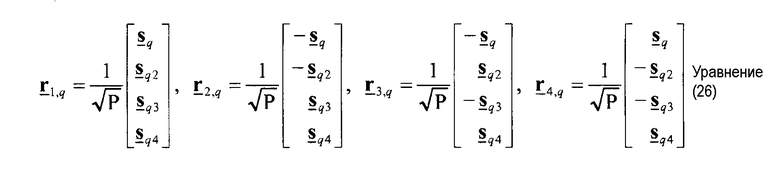
Для шаблона пилот-сигнала, изображенного на Фиг. 5, используя исходную и обращенную последовательности, показанные в уравнении 24, базисные векторы r i,q для i=1,…,4 могут быть выражены как:
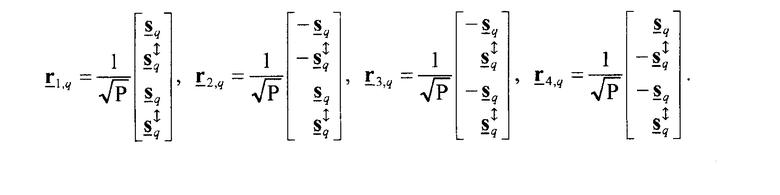 Уравнение 24
Уравнение 24
Оценка канала и оценка шума и помех для терминала q может быть выполнена способом, описанным выше, тем не менее, базисный вектор r i,q определяют, как показано в уравнении 24, вместо уравнения 7. Вклад из другого терминала k в результат проецирования для терминала q может быть выражен как:
 Уравнение 25
Уравнение 25
где  и
и  .
.
Может быть показано, что ni,q,k=0 для i=1, 2 и 4 вследствие обращения скремблирующей последовательности. N3,q,k может быть не равно нулю даже с помощью обращения, что означает, что имеется погрешность, влияющая на w 3,q для изменяющегося во времени компонента канала. Тем не менее, погрешность, внесенная в оценку канала является меньше с помощью обращения вследствие умножения на коэффициент MMSE, соответствующий изменяющемуся во времени компоненту.
Для шаблона пилот-сигнала, изображенного на Фиг.5D, используя четыре варианта скремблирующей последовательности, показанной в уравнении 23, базисные векторы r i,q для i=1,…,4 могут быть выражены как:
Компьютерное моделирование показывает, что для большого отношения сигнала к шуму и помехам (SINR) наибольшее целое погрешности оценки канала можно уменьшить приблизительно на 2 децибела (dB) для транспортных каналов с шаблоном пилот-сигнала, изображенным на Фиг. 5А. Это может улучшить частоту ошибок пакета и эффективность данных.
Для пояснения способы описаны для передачи пилот-сигнала в обратной линии связи и для оценки канала и помех для терминалов. Способы также могут быть использованы для передачи пилот-сигнала в прямой линии связи и для оценки канала для базовой станции. В прямой линии связи разным пространственным каналам или уровням могут быть назначены разные скремблирующие последовательности. Обработка для разных уровней в прямой линии связи может быть аналогичной обработке для разных терминалов в обратной линии связи.
Фиг.6 изображает блок-схему процесса 600, выполняемого с помощью передатчика, чтобы передавать пилот-сигнал в приемник. Процесс 600 может быть выполнен с помощью терминала, чтобы передавать пилот-сигнал обратной линии связи в базовую станцию. Процесс 600 также может быть выполнен с помощью базовой станции, чтобы передавать пилот-сигнал в прямой линии связи в терминалы. Таким образом, передатчик может быть терминалом или базовой станцией, а приемник может быть базовой станцией или терминалом. Пилот-символы для первого кластера в частотно временном блоке (или мозаичном элементе) могут быть сгенерированы на основании первой последовательности (этап 612). Пилот-символы для второго кластера в частотно временном блоке могут быть сгенерированы на основании второй последовательности (этап 614). Пилот-символы для третьего кластера в частотно временном блоке могут быть сгенерированы на основании первой или третьей последовательности (этап 616). Пилот-символы для четвертого кластера в частотно временном блоке могут быть сгенерированы на основании второй или четвертой последовательности (этап 618). Пилот-символы могут быть переданы в их соответственных кластерах (этап 620).
Первая, вторая, третья и четвертая последовательности могут включать в себя общие элементы, расположенные в разных порядках, и могут быть рассмотрены как разные варианты одной последовательности. Например, элементы во второй последовательности могут располагаться в обратном порядке (или обращены) относительно элементов в первой последовательности. Пилот-символы могут быть сгенерированы таким образом, что они являются симметричными относительно центра частотно-временного блока, например, как изображено на Фиг. 5А-5D. Пилот-символы во всех кластерах также могут быть расположены другими способами, возможно, несимметричными способами. Каждая последовательность может включать в себя М элементов, используемых, чтобы сформировать М пилот-символов для одного кластера, где М может быть три, четыре и т.д. Каждая последовательность может включать в себя элементы в столбце матрицы Фурье или элементы, определенные другими способами.
Для обратной линии связи первая последовательность может быть назначена терминалу и может быть ортогональной, по меньшей мере, одной другой последовательности, назначенной, по меньшей мере, одному другому терминалу, совместно использующему первый кластер. Аналогично вторая, третья и четвертая последовательности могут быть назначены терминалу. Каждая последовательность, назначенная терминалу, может быть ортогональной другой последовательности (последовательностям), назначенной другому терминалу (терминалам) для кластера, в которой используют эту последовательность. Для прямой линии связи первая последовательность может быть назначена уровню и может быть ортогональной, по меньшей мере, одной другой последовательности, назначенной, по меньшей мере, одному другому уровню для первого кластера.
Фиг.7 изображает структуру устройства 700, предназначенного для передачи пилот сигнала. Устройство 700 включает в себя средство для формирования пилот-символов для первого кластера в частотно-временном блоке (или мозаичном элементе) на основании первой последовательности (модуль 712), средство для формирования пилот-символов для второго кластера в частотно-временном блоке на основании второй последовательности (модуль 714), средство для формирования пилот-символов для третьего кластера в частотно-временном блоке на основании первой или третьей последовательности (модуль 716), средство для формирования пилот-символов для четвертого кластера в частотно-временном блоке на основании второй или четвертой последовательности (модуль 718) и средство для передачи пилот-символов в их соответственных кластерах (модуль 720). Первая, вторая, третья и четвертая последовательности могут включать в себя общие элементы, расположенные в разных порядках. Модули 712 по 720 могут содержать процессоры, электронные устройства, устройства аппаратного обеспечения, электронные компоненты, логические схемы, памяти и т.д. или их комбинацию.
Фиг. 8 изображает блок-схему процесса 800, выполняемого с помощью приемника, чтобы обрабатывать пилот-сигнал, принятый из одного или более передатчиков. Процесс 800 может быть выполнен с помощью базовой станции, чтобы обрабатывать пилот-сигнал, принятый в обратной линии связи из одного или более терминалов. Процесс 800 также может быть выполнен с помощью терминала, чтобы обрабатывать пилот-сигнал, принятый в прямой линии связи из базовой станции для одного или более уровней, где каждый уровень может быть рассмотрен как отдельный передатчик. Таким образом, приемник может быть базовой станцией или терминалом, и передатчик может быть терминалом или базовой станцией. Принятые пилот-символы могут быть получены из множества кластеров в частотно-временном блоке (этап 812). Каждый из множества базисных векторов может быть сформирован с помощью множества вариантов последовательности, назначенной передатчику (этап 814). Последовательность может включать в себя М элементов, и множество вариантов последовательности может соответствовать разным порядкам М элементов в последовательности. Множество базисных векторов дополнительно может быть сформировано на основании конкретной модели канала, например, модели канала с линейно изменяющейся временной составляющей и линейно изменяющейся частотной составляющей, как показано в уравнении 7. Принятые пилот-символы могут быть обработаны с помощью множества базисных векторов, чтобы получить оценку канала для передатчика, например, как показано в уравнениях 8 и 11 (этап 816). Принятые пилот-символы также могут быть обработаны, по меньшей мере, с помощью одного базисного вектора, чтобы получить оценку шума и помех, например, как показано в уравнениях 8 и 9 (этап 818).
Для этапа 814 каждый базисный вектор может быть сформирован на основании исходного варианта и обращенного варианта последовательности, например, как показано в уравнении 22. В качестве альтернативы каждый базисный вектор может быть сформирован на основании четырех вариантов последовательности, например, как показано в уравнении 23. В любом случае множество векторов последовательности могут быть использованы, чтобы сформировать пилот-символы для множества кластеров, таким образом, что пилот-символы являются симметричным относительно центра частотно-временного блока.
Для этапа 816 множество комплексных величин (wi,j) может быть получено на основании скалярных произведений принятых пилот-символов с множеством базисных векторов, например, как показано в уравнении 8. Множество комплексных величин может содержать первую комплексную величину, указывающую средний коэффициент усиления канала для частотно-временного блока, вторую комплексную величину, указывающую изменение канала по частоте, и третью комплексную величину, указывающую изменение канала во времени. Оценка канала для передатчика может быть получена на основании множества комплексных величин, например, как показано в уравнении 11.
Фиг.9 изображает структуру устройства 900, предназначенного для обработки принятого пилот-сигнала. Устройство 900 включает в себя средство для получения принятых пилот-символов из множества кластеров в частотно-временном блоке (модуль 912), средство для формирования каждого из множества базисных векторов с помощью множества вариантов последовательности, назначенной передатчику (модуль 914), средство для обработки принятых пилот-символов с помощью множества базисных векторов, чтобы получить оценку канала для передатчика (модуль 916), и средство для обработки принятых пилот-символов, по меньшей мере, с помощью одного базисного вектора, чтобы получить оценку шума и помех (модуль 918). Множество вариантов последовательности могут соответствовать разным порядкам элементов в последовательности. Модули 912 по 918 могут содержать процессоры, электронные устройства, устройства аппаратного обеспечения, электронные компоненты, логические схемы, памяти и т.д. или их комбинацию.
Способы, описанные в настоящей заявке, могут быть осуществлены с помощью различных средств. Например, эти способы могут быть осуществлены как аппаратное обеспечение, программно-аппаратное обеспечение, программное обеспечение или их комбинация. Для осуществления аппаратного обеспечения устройства обработки, используемые, чтобы выполнять способы в любом объекте (например, базовой станции или терминале), могут быть осуществлены в одной или более интегральных схемах прикладной ориентации (ASIC), процессорах цифровых сигналов (DSP), устройствах обработки цифровых сигналов (DSPD), программируемых логических устройствах (PLD), вентильных матрицах, программируемых в условиях эксплуатации (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных устройствах, предназначенных для выполнения функций, описанных в настоящей заявке, компьютере или их комбинации.
Для осуществления программно-аппаратного обеспечения и/или программного обеспечения способы могут быть осуществлены с помощью модулей (например, процедур, функций, модулей, инструкций и т.д.), которые выполняют функции, описанные в настоящей заявке. Инструкции программно-аппаратного обеспечения и/или программного обеспечения могут быть запомнены в памяти (например, памяти 142х, 142y или 182 на Фиг. 1) и выполнены с помощью процессора (например, процессора 140х, 140y или 180). Память может быть осуществлена в процессоре или внешне к процессору. Инструкции программно-аппаратного обеспечения и/или программного обеспечения также может быть запомнены в другой среде, доступной для чтения с помощью процессора, такой как память прямого доступа (RAM), память, доступная только по чтению (ROM), энергонезависимая память прямого доступа (NVRAM), программируемая память, доступная только по чтению (PROM), электрически стираемая PROM (EEPROM), флэш-память, компакт-диск (CD), магнитное или оптическое устройство запоминания данных и т.д.
Предыдущее раскрытие предоставлено для того, чтобы дать возможность любому специалисту в данной области техники изготовить и использовать раскрытие. Различные модификации в раскрытии будут без труда понятны специалистам в данной области техники, и общие принципы, определенные в настоящей заявке, могут быть применены к другим вариантам, не выходя за рамки сущности и объема раскрытия. Таким образом, не подразумевается, что раскрытие должно быть ограничено примерами и схемами, описанными в настоящей заявке, но должно соответствовать самым широким рамкам, согласующимся с принципами и новыми признаками, раскрытыми в настоящей заявке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОПОСТАВЛЕНИЕ РЕСУРСОВ УПРАВЛЕНИЯ ДЛЯ БЕСПРОВОДНОЙ СИСТЕМЫ СВЯЗИ | 2008 |
|
RU2528145C2 |
| ПЕРЕДАЧА ПИЛОТ-СИГНАЛА ДЛЯ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ С ОРТОГОНАЛЬНЫМ ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2006 |
|
RU2370902C2 |
| СОПОСТАВЛЕНИЕ РЕСУРСОВ УПРАВЛЕНИЯ ДЛЯ БЕСПРОВОДНОЙ СИСТЕМЫ СВЯЗИ | 2008 |
|
RU2430491C2 |
| СИСТЕМА БЕСПРОВОДНОЙ ЛОКАЛЬНОЙ ВЫЧИСЛИТЕЛЬНОЙ СЕТИ СО МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ | 2003 |
|
RU2335852C2 |
| ПРОКАЛЫВАНИЕ КАНАЛОМ СИГНАЛИЗАЦИИ ДЛЯ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2419208C2 |
| СИСТЕМА БЕСПРОВОДНОЙ ЛОКАЛЬНОЙ ВЫЧИСЛИТЕЛЬНОЙ СЕТИ С МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ | 2003 |
|
RU2485699C2 |
| ВРЕМЕННАЯ ФИЛЬТРАЦИЯ ДЛЯ УМЕНЬШЕНИЯ ИЗБЫТОЧНОЙ ЗАДЕРЖКИ В СИСТЕМАХ С OFDM | 2005 |
|
RU2359419C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МУЛЬТИПЛЕКСИРОВАНИЯ ПИЛОТ-СИГНАЛА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2404529C2 |
| КАЛИБРОВКА КАНАЛОВ ДЛЯ СИСТЕМЫ ДУПЛЕКСНОЙ СВЯЗИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2006 |
|
RU2407151C2 |
| ПИЛОТ-СИГНАЛЫ ОБНАРУЖЕНИЯ ДЛЯ БЕСПРОВОДНЫХ СИСТЕМ СВЯЗИ | 2007 |
|
RU2419204C2 |
Изобретение относится к области радиосвязи, более конкретно, к структуре пилот-сигнала для беспроводной системы связи. Технический результат - более эффективная оценка канала и помех для каждого терминала посредством оценки отклика канала на основании пилот-сигналов. Терминал может формировать пилот-символы для первого кластера в частотно-временном блоке на основании первой последовательности и может формировать пилот-символы для второго кластера в частотно-временном блоке на основании второй последовательности. Первая и вторая последовательности могут включать в себя общие элементы, расположенные в разных порядках, и могут быть рассмотрены как разные варианты одной последовательности. Терминал может передавать пилот-символы в соответствующих им кластерах в частотно-временном блоке. Базовая станция может формировать каждый из множества базисных векторов с помощью множества вариантов последовательности, назначаемой терминалу, и может обрабатывать принятые пилот-символы с помощью множества базисных векторов, чтобы получить оценку канала для терминала. 8 н. и 34 з.п. ф-лы, 9 ил.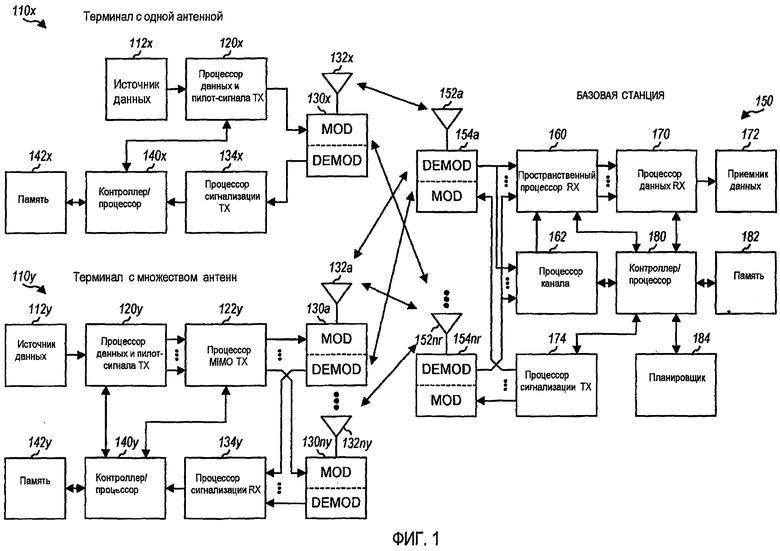
1. Устройство для формирования пилот-символов, содержащее:
процессор, выполненный с возможностью формировать пилот-символы для множества кластеров в шаблоне пилот-сигнала в пределах частотно-временного блока; и
память, соединенную с процессором;
причем кластеры содержат пилот-символы, распределенные таким образом, что пилот-символы, общие для различных кластеров, расположены симметрично относительно центра частотно-временного блока.
2. Устройство по п.1, в котором пилот-символы в первом кластере расположены в исходной последовательности, а пилот- символы в оставшихся кластерах шаблона пилот-сигнала расположены в скремблированных последовательностях относительно исходной последовательности.
3. Устройство по п.2, в котором процессор выполнен с возможностью создавать первый кластер в частотно-временном блоке на основании первой последовательности и создавать второй кластер в частотно-временном блоке на основании второй последовательности таким образом, что пилот-символы во второй последовательности расположены в обратном порядке относительно пилот-символов в первой последовательности.
4. Устройство по п.3, в котором пилот-символы во втором кластере симметричны относительно пилот-символов в первом кластере вокруг центра частотно-временного блока.
5. Устройство по п.3, в котором процессор выполнен с возможностью формировать пилот-символы для третьего кластера в частотно-временном блоке на основании первой последовательности и формировать пилот-символы для четвертого кластера в частотно-временном блоке на основании второй последовательности.
6. Устройство по п.3, в котором процессор выполнен с возможностью формировать пилот-символы для третьего кластера в частотно-временном блоке на основании третьей последовательности и формировать пилот-символы для четвертого кластера в частотно-временном блоке на основании четвертой последовательности.
7. Устройство по п.6, в котором первая, вторая, третья и четвертая последовательности включают в себя общие элементы, распределенные разным образом.
8. Устройство по п.3, в котором процессор выполнен с возможностью формировать М пилот-символов для первого кластера на основании М элементов в первой последовательности и формировать М пилот-символов для второго кластера на основании М элементов во второй последовательности, где М - целое число, большее единицы.
9. Устройство по п.1, в котором первая последовательность пилот-символов в первом кластере назначена терминалу и является ортогональной, по меньшей мере, к одной другой последовательности пилот-символов в первом кластере, назначенной, по меньшей мере, одному другому терминалу для первого кластера.
10. Устройство по п.3, в котором первая и вторая последовательности назначены терминалу, причем первая последовательность ортогональна первому набору, по меньшей мере, из одной другой последовательности, назначенной, по меньшей мере, одному другому терминалу для первого кластера, и причем вторая последовательность ортогональна второму набору, по меньшей мере, из одной другой последовательности, назначенной, по меньшей мере, одному другому терминалу для второго кластера.
11. Устройство по п.1, в котором первая последовательность пилот-символов в кластере включает в себя элементы в столбце матрицы Фурье.
12. Устройство по п.3, в котором каждая из первой и второй последовательностей включает в себя три элемента, используемые для формирования трех пилот-символов для одного кластера.
13. Устройство по п.3, в котором каждая из первой и второй последовательностей включает в себя четыре элемента, используемые для формирования четырех пилот-символов для одного кластера.
14. Способ формирования пилот-символов, содержащий этапы, на которых:
формируют пилот-символы для первого кластера в шаблоне пилот-сигнала в пределах частотно-временного блока; и
формируют пилот-символы для оставшихся кластеров в шаблоне пилот-сигнала таким образом, что пилот-символы, общие для различных кластеров, расположены симметрично относительно центра частотно-временного блока.
15. Способ по п.14, в котором общие элементы в первом кластере содержат исходную последовательность, а общие элементы в оставшихся кластерах шаблона пилот-сигнала содержат скремблированные последовательности относительно исходной последовательности.
16. Способ по п.15, дополнительно содержащий этапы, на которых:
формируют пилот-символы для первого кластера в частотно-временном блоке на основании первой последовательности; и
формируют пилот-символы для второго кластера в частотно-временном блоке на основании второй последовательности.
17. Способ по п.16, дополнительно содержащий этапы, на которых:
формируют пилот-символы для третьего кластера в частотно-временном блоке на основании первой последовательности; и
формируют пилот-символы для четвертого кластера в частотно-временном блоке на основании второй последовательности.
18. Способ по п.16, дополнительно содержащий этапы, на которых:
формируют пилот-символы для третьего кластера в частотно-временном блоке на основании третьей последовательности; и
формируют пилот-символы для четвертого кластера в частотно-временном блоке на основании четвертой последовательности.
19. Способ по п.16, в котором первую и вторую последовательности назначают терминалу, причем первая последовательность ортогональна первому набору, по меньшей мере, из одной другой последовательности, назначенной, по меньшей мере, одному другому терминалу для первого кластера, и причем вторая последовательность ортогональна второму набору, по меньшей мере, из одной другой последовательности, назначенной, по меньшей мере, одному другому терминалу для второго кластера.
20. Устройство для формирования пилот-символов, содержащее:
средство для формирования пилот-символов для первого
кластера в шаблоне пилот-сигнала в пределах частотно-временного блока; и
средство для формирования пилот-символов для оставшихся кластеров в шаблоне пилот-сигнала таким образом, что пилот-символы, общие для различных кластеров, расположены симметрично относительно центра частотно-временного блока.
21. Устройство по п.20, дополнительно содержащее:
средство для формирования пилот-символов для первого кластера в частотно-временном блоке на основании первой последовательности; и
средство для формирования пилот-символов для второго кластера в частотно-временном блоке на основании второй последовательности.
22. Устройство по п.21, дополнительно содержащее:
средство для формирования пилот-символов для третьего кластера в частотно-временном блоке на основании первой последовательности; и
средство для формирования пилот-символов для четвертого кластера в частотно-временном блоке на основании второй последовательности.
23. Устройство по п.21, дополнительно содержащее:
средство для формирования пилот-символов для третьего кластера в частотно-временном блоке на основании третьей последовательности; и
средство для формирования пилот-символов для четвертого кластера в частотно-временном блоке на основании четвертой последовательности.
24. Машиночитаемый носитель, на котором хранятся инструкции, причем хранимые инструкции содержат:
первый набор инструкций для формирования пилот-символов для первого кластера в шаблоне пилот-сигнала в пределах частотно-временного блока; и
второй набор инструкций для формирования пилот-символов для оставшихся кластеров в шаблоне пилот-сигнала таким образом, что пилот-символы, общие для различных кластеров, расположены симметрично относительно центра частотно-временного блока.
25. Устройство для обработки пилот-символов, содержащее:
процессор, выполненный с возможностью получать принятые пилот-символы из множества кластеров в шаблоне пилот-сигнала в пределах частотно-временного блока, формировать каждый из множества базисных векторов с помощью множества вариантов последовательности, назначенной передатчику, и обрабатывать принятые пилот-символы с помощью множества базисных векторов; и
память, соединенную с процессором;
причем кластеры содержат пилот-символы, распределенные таким образом, что пилот-символы, общие для различных кластеров, расположены симметрично относительно центра частотно-временного блока.
26. Устройство по п.25, в котором пилот-символы в первом кластере расположены в исходной последовательности, а пилот-символы в оставшихся кластерах шаблона пилот-сигнала расположены в скремблированных последовательностях относительно исходной последовательности.
27. Устройство по п.25, в котором процессор выполнен с возможностью формировать каждый базисный вектор на основании исходного варианта и обращенного варианта последовательности.
28. Устройство по п.25, в котором процессор выполнен с возможностью формировать каждый базисный вектор на основании четырех вариантов последовательности, используемой для формирования пилот-символов для множества кластеров, причем пилот-символы симметричны относительно центра частотно-временного блока.
29. Устройство по п.25, в котором процессор выполнен с возможностью формировать множество базисных векторов дополнительно на основании модели канала с линейно изменяющейся временной составляющей и линейно изменяющейся частотной составляющей.
30. Устройство по п.25, в котором процессор выполнен с возможностью получать множество комплексных величин на основании скалярных произведений принятых пилот-символов с множеством базисных векторов и извлекать оценки канала для передатчика на основании множества комплексных величин.
31. Устройство по п.30, в котором множество комплексных величин содержит первую комплексную величину, указывающую средний коэффициент усиления канала для частотно-временного блока.
32. Устройство по п.30, в котором множество комплексных величин содержит вторую комплексную величину, указывающую изменение канала по частоте, и третью комплексную величину, указывающую изменение канала во времени.
33. Устройство по п.25, в котором процессор выполнен с возможностью получать, по меньшей мере, одну комплексную величину на основании скалярного произведения принятых пилот-символов, по меньшей мере, с одним другим базисным вектором и получать оценки шума и помех на основании, по меньшей мере, одной комплексной величины.
34. Способ обработки пилот-символов, содержащий этапы, на которых:
получают принятые пилот-символы из множества кластеров в шаблоне пилот-сигнала в пределах частотно-временного блока;
формируют каждый из множества базисных векторов с помощью множества вариантов последовательности, назначенной передатчику; и
обрабатывают принятые пилот-символы с помощью множества базисных векторов;
причем кластеры содержат пилот-символы, распределенные таким образом, что пилот-символы, общие для различных кластеров, расположены симметрично относительно центра частотно-временного блока.
35. Способ по п.34, в котором пилот-символы в первом кластере расположены в исходной последовательности, а пилот-символы в оставшихся кластерах шаблона пилот-сигнала расположены в скремблированных последовательностях относительно исходной последовательности.
36. Способ по п.34, в котором этап обработки принятых пилот-символов с помощью множества базисных векторов, содержит этапы, на которых:
получают множество комплексных величин на основании скалярных произведений принятых пилот-символов с множеством базисных векторов; и
извлекают оценку канала для передатчика на основании множества комплексных величин.
37. Способ по п.36, в котором множество комплексных величин содержит первую комплексную величину, указывающую средний коэффициент усиления канала для частотно-временного блока, вторую комплексную величину, указывающую изменение канала по частоте, и третью комплексную величину, указывающую изменение канала во времени.
38. Способ по п.34, дополнительно содержащий этапы, на которых:
получают, по меньшей мере, одну комплексную величину на основании скалярного произведения принятых пилот-символов, по меньшей мере, с одним другим базисным вектором; и
извлекают оценку шума и помех на основании, по меньшей мере, одной комплексной величины.
39. Устройство для обработки пилот-символов, содержащее:
средство для получения принятых пилот-символов из множества кластеров в шаблоне пилот-символов в пределах частотно-временного блока;
средство для формирования каждого из множества базисных векторов с помощью множества вариантов последовательности, назначенной передатчику; и
средство для обработки принятых пилот-символов с помощью множества базисных векторов;
причем кластеры содержат пилот-символы, распределенные таким образом, что пилот-символы, общие для различных кластеров, расположены симметрично относительно центра частотно-временного блока.
40. Устройство по п.39, в котором средство для обработки принятых пилот-символов с помощью множества базисных векторов содержит:
средство для получения множества комплексных величин на основании скалярных произведений принятых пилот-символов с множеством базисных векторов; и
средство для извлечения оценки канала для передатчика на основании множества комплексных величин.
41. Устройство по п.39, дополнительно содержащее:
средство для получения, по меньшей мере, одной комплексной величины на основании скалярного произведения принятых пилот-символов, по меньшей мере, с одним другим базисным вектором; и
средство для извлечения оценки шума и помех на основании, по меньшей мере, одной комплексной величины.
42. Машиночитаемый носитель, на котором хранятся инструкции, причем хранимые инструкции содержат:
первый набор инструкций для получения принятых пилот-символов из множества кластеров в частотно-временном блоке;
второй набор инструкций для формирования каждого из множества базисных векторов с помощью множества вариантов последовательности, назначенной передатчику; и
третий набор инструкций для обработки принятых пилот-символов с помощью множества базисных векторов;
причем кластеры содержат пилот-символы, распределенные таким образом, что пилот-символы, общие для различных кластеров, расположены симметрично относительно центра частотно-временного блока.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| УСТРОЙСТВО И СПОСОБ ГЕНЕРАЦИИ ПОСЛЕДОВАТЕЛЬНОСТИ ПРЕАМБУЛЫ В СИСТЕМЕ СВЯЗИ ОМЧР | 2003 |
|
RU2278474C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

