Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к области связи, и, в частности, к методам калибровки характеристик каналов нисходящей и восходящей линий связи в системе дуплексной связи с временным разделением каналов (TDD).
Уровень техники
В системе беспроводной связи передача данных между точкой доступа и пользовательским терминалом осуществляется по беспроводному каналу. В зависимости от конструкции системы один и тот же или разные частотные диапазоны можно использовать для нисходящей и восходящей линий связи. Нисходящая линия связи (или прямая линия связи) - это линия связи от точки доступа к пользовательскому терминалу и восходящая линия связи (или обратная линия связи) - это линия связи от пользовательского терминала к точке доступа. При наличии двух частотных диапазонов для нисходящей и восходящей линий связи могут быть выделены отдельные частотные диапазоны с использованием дуплексной связи с частотным разделением каналов (FDD). При наличии только одного частотного диапазона нисходящая и восходящая линии связи могут совместно использовать один и тот же частотный диапазон с использованием дуплексной связи с временным разделением каналов (TDD).
Для достижения высокой производительности часто бывает необходимо знать частотную характеристику беспроводного канала. Например, характеристика канала нисходящей линии связи может быть нужна точке доступа для осуществления пространственной обработки (описана ниже) для передачи данных по нисходящей линии связи на пользовательский терминал. Пользовательский терминал может оценивать характеристику канала нисходящей линии связи на основании пилот-сигнала, передаваемого точкой доступа. Затем пользовательский терминал может передавать оценку характеристики канала нисходящей линии связи обратно на точку доступа для ее использования. В этой схеме оценки канала пилот-сигнал нужно передавать по нисходящей линии связи, и дополнительные задержки и ресурсы привлекаются для отправки канальной оценки обратно на точку доступа.
Для системы TDD с совместно используемым частотным диапазоном можно предполагать, что характеристики каналов нисходящей и восходящей линий связи являются взаимно обратными величинами. Таким образом, если H представляет матрицу характеристики канала от антенной решетки A на антенную решетку B, то для обратного канала предполагается, что связь от решетки В к решетке A задается посредством H T, где H T обозначает матрицу, полученную транспонированием матрицы H . Таким образом, для системы TDD канальную характеристику для одной линии связи можно оценить на основании пилот-сигнала, переданного по другой линии связи. Например, характеристику канала восходящей линии связи можно оценивать на основании пилот-сигнала, принимаемого по восходящей линии связи, и транспонированную оценку характеристики канала восходящей линии связи можно использовать в качестве оценки характеристики канала нисходящей линии связи.
Однако частотные характеристики передающей и приемной цепей в точке доступа обычно отличаются от частотных характеристик передающей и приемной цепей на пользовательском терминале. В частности, частотные характеристики передающей и приемной цепей, используемых для передачи по восходящей линии связи, могут отличаться от частотных характеристик передающей и приемной цепей, используемых для передачи по нисходящей линии связи. Поэтому "эффективная" характеристика канала нисходящей линии связи (который включает в себя характеристики применимых передающей и приемной цепей) будет отличаться от обратной величины эффективной характеристики канала восходящей линии связи вследствие различий в передающей и приемной цепях (т.е. эффективные канальные характеристики не являются обратными величинами). Если обратная величина оценки канальной характеристики, полученной для одной линии связи, используется пространственной обработки на другой линии связи, то любое различие в частотных характеристиках передающей и приемной цепей приведет к ошибке, которая, не будучи определена и учтена, может привести к снижению производительности.
Поэтому в современной технике существует необходимость в методах калибровки каналов нисходящей линии связи и восходящей линии связи в системе связи TDD.
Сущность изобретения
Здесь предусмотрены методы калибровки каналов нисходящей линии связи и восходящей линии связи для учета различий в частотных характеристиках передающей и приемной цепей в точке доступа и на пользовательском терминале. После калибровки оценку канальной характеристики, полученную для одной линии связи, можно использовать для получения оценки канальной характеристики для другой линии связи. Это может упрощать оценку каналов и пространственную обработку.
В конкретном варианте осуществления предусмотрен способ калибровки каналов нисходящей линии связи и восходящей линии связи в системе беспроводной связи TDD с множественными входами и множественными выходами (MIMO). Согласно способу пилот-сигнал передают по каналу восходящей линии связи и используют его для вывода оценки характеристики канала восходящей линии связи. Пилот-сигнал также передают по каналу нисходящей линии связи и используют его для вывода оценки характеристики канала нисходящей линии связи. Затем определяют коэффициенты коррекции для точки доступа и коэффициенты коррекции для пользовательского терминала на основании оценок характеристик каналов нисходящей линии связи и восходящей линии связи. Точка доступа может применять свои коэффициенты коррекции на своей передающей стороне или на своей приемной стороне или на обеих, передающей и приемной, сторонах. Пользовательский терминал также может применять свои коэффициенты коррекции на своей передающей стороне или на своей приемной стороне или на обеих, передающей и приемной, сторонах. Характеристики калиброванных каналов нисходящей линии связи и восходящей линии связи являются приблизительно обратными величинами, когда в точке доступа применяют ее коэффициенты коррекции и в пользовательском терминале также применяют его коэффициенты коррекции. Коэффициенты коррекции можно определять с использованием вычисления отношения матриц или вычисления минимальной среднеквадратической ошибки (MMSE) на оценках характеристик каналов нисходящей линии связи и восходящей линии связи, что описано ниже.
Калибровка может осуществляться в реальном времени на основании радиопередачи. Каждый пользовательский терминал в системе может осуществлять калибровку с одной или несколькими точками доступа для вывода своих коэффициентов коррекции. Аналогично, каждая точка доступа может осуществлять калибровку с одним или несколькими пользовательскими терминалами для вывода своих коэффициентов коррекции. Для системы мультиплексирования с ортогональным частотным разделением каналов (OFDM) калибровка может осуществляться для множество частотных поддиапазонов для получения коэффициентов коррекции для каждого частотного поддиапазона в множестве. Коэффициенты коррекции для других "некалиброванных" частотных поддиапазонов могут интерполироваться на основании коэффициентов коррекции, полученных для "калиброванных" частотных поддиапазонов.
Ниже более подробно описаны различные аспекты и варианты осуществления изобретения.
Краткое описание чертежей
Признаки, сущность и преимущества настоящего изобретения станут более понятны из подробного описания, приведенного ниже совместно с чертежами, снабженными сквозной системой обозначений.
Фиг.1 - схемы передающей и приемной цепей в точке доступа и на пользовательском терминале в системе MIMO.
Фиг.2A - схема применения коэффициентов коррекции на обеих, передающей и приемной, сторонах в точке доступа и на пользовательском терминале.
Фиг.2B - схема применения коэффициентов коррекции на передающей стороне как в точке доступа, так и на пользовательском терминале.
Фиг.2C - схема применения коэффициентов коррекции на приемной стороне как в точке доступа, так и на пользовательском терминале.
Фиг.3 - схема процесса калибровки характеристик каналов нисходящей и восходящей линий связи в системе MIMO-OFDM с TDD.
Фиг.4 - схема процесса вывода оценок векторов коррекции из оценок характеристик каналов нисходящей линии связи и восходящей линии связи.
Фиг.5 - блок-схема точки доступа и пользовательского терминала.
Фиг.6 - блок-схема пространственного процессора передачи (TX).
Подробное описание
Описанные здесь методы калибровки можно использовать для различных систем беспроводной связи. Кроме того, эти методы можно использовать для систем с одним входом и одним выходом (SISO), систем с множественными входами и одним выходом (MISO), систем с одним входом и множественными выходами (SIMO) и систем с множественными входами и с множественными выходами (MIMO).
В системе MIMO применяются множественные (NT) передающие антенны и множественные (NR) приемные антенны для передачи данных. Канал MIMO, образованный NT передающими и NR приемными антеннами, можно разложить на NS независимых каналов, причем NS≤min{NT, NR}. Каждый из NS независимых каналов также именуется пространственным каналом канала MIMO и соответствует пространственному измерению. Система MIMO может обеспечивать повышенную производительность (например, повышенную пропускную способность передачи) в случае использования дополнительных пространственных измерений, созданных множественными передающими и приемными антеннами. Для этого обычно требуется точная оценка характеристики канала между передатчиком и приемником.
На фиг.1 показана блок-схема передающей и приемной цепей в точке доступа 102 и на пользовательском терминале 104 в системе MIMO. Для этой системы нисходящая и восходящая линии связи совместно используют один и тот же частотный диапазон в режиме дуплексной связи с временным разделением каналов.
Для нисходящей линии связи, в точке доступа 102, символы (обозначенные как вектор x dn "передачи") обрабатываются передающей цепью 114 и передаются с Nap антенн 116 по беспроводному каналу. На пользовательском терминале 104 сигналы нисходящей линии связи принимаются Nut антеннами 152 и обрабатываются приемной цепью 154 для получения принятых символов (обозначенных как вектор r dn "приема"). Обработка в передающей цепи 114 обычно включает в себя цифроаналоговое преобразование, усиление, фильтрацию, преобразование с повышением частоты и т.д. Обработка в приемной цепи 154 обычно включает в себя преобразование с понижением частоты, усиление, фильтрацию, аналого-цифровое преобразование и т.д.
Для восходящей линии связи, на пользовательском терминале 104, символы (обозначенные как вектор передачи x up) обрабатываются передающей цепью 164 и передаются с Nut антенн 152 по беспроводному каналу. В точке доступа 102 сигналы восходящей линии связи принимаются Nap антеннами 116 и обрабатываются приемной цепью 124 для получения принятых символов (обозначенных как вектор приема r up).
Для нисходящей линии связи вектор приема на пользовательском терминале можно выразить в виде

 Ур. (1)
Ур. (1)
где x dn - вектор передачи с Nap элементами для символов, передаваемых с Nap антенн в точке доступа;
r dn - вектор приема с Nut элементами для символов, принимаемых на Nut антеннах на пользовательском терминале;
T ap - диагональная матрица Nap×Nap с элементами для комплексных коэффициентов усиления, связанных с передающей цепью для Nap антенн в точке доступа;
R ut - диагональная матрица Nut×Nut с элементами для комплексных коэффициентов усиления, связанных с приемной цепью для Nut антенн на пользовательском терминале; и
H - матрица канальной характеристики Nut×Nap для нисходящей линии связи.
Характеристики передающей и приемной цепей и характеристика беспроводного канала обычно являются функцией частоты. Для простоты предполагаем, что характеристики являются плавно замирающими (т.е. плоскими частотными характеристиками).
Для восходящей линии связи вектор приема в точке доступа можно выразить в виде

 Ур. (2)
Ур. (2)
где x up - вектор передачи для символов, передаваемых с Nut антенн на пользовательском терминале;
r up - вектор приема для символов, принимаемых на Nap антеннах в точке доступа;
T ut - диагональная матрица Nut×Nut с элементами для комплексных коэффициентов усиления, связанных с передающей цепью для Nut антенн на пользовательском терминале;
R ap - диагональная матрица Nap×Nap с элементами для комплексных коэффициентов усиления, связанных с приемной цепью для Nap антенн в точке доступа; и
H T - матрица канальной характеристики Nap×Nut для восходящей линии связи.
Для системы TDD, поскольку нисходящая и восходящая линии связи совместно используют один и тот же частотный диапазон, обычно существует высокая степень корреляции между характеристиками каналов нисходящей и восходящей линий связи. Таким образом, можно предположить, что матрицы характеристик каналов нисходящей линии связи и восходящей линии связи являются обратными (или транспонированными) по отношению друг к другу и обозначаются как H и H T соответственно, как показано в уравнениях (1) и (2). Однако характеристики передающей и приемной цепей в точке доступа обычно не равны характеристикам передающей и приемной цепей на пользовательском терминале. Различия приводят к следующему неравенству R ap H T T ut ≠ ( R ut HT ap)T.
Из уравнений (1) и (2) "эффективные" характеристики каналов нисходящей и восходящей линий связи, H dn и H up, которые включают в себя характеристики применимых передающей и приемной цепей, можно выразить в виде
 и
и 
 Ур. (3)
Ур. (3)
Объединяя два уравнения в системе уравнений (3), можно получить следующее соотношение:
 Ур. (4)
Ур. (4)
Преобразуя уравнение (4), получаем

или
 Ур. (5)
Ур. (5)
где  и
и  . Уравнение (5) также можно выразить в виде
. Уравнение (5) также можно выразить в виде
 Ур. (6)
Ур. (6)
Левая сторона уравнения (6) представляет одну форму характеристики калиброванного канала восходящей линии связи, а правая сторона представляет транспонированный вид одной формы характеристики калиброванного канала нисходящей линии связи. Применение диагональных матриц,
K
ut и
K
ap, к эффективным характеристикам каналов нисходящей и восходящей линий связи, как показано в уравнении (6), позволяет выразить характеристики калиброванных каналов для нисходящей и восходящей линий связи в виде матриц, транспонированных относительно друг друга. Диагональная матрица
K
ap Nap×Nap для точки доступа - это отношение характеристики приемной цепи
R
ap к характеристике передающей цепи
T
ap (или  ), где отношение вычисляется поэлементно. Аналогично, диагональная матрица
K
ut Nut×Nut для пользовательского терминала - это отношение характеристики приемной цепи
R
ut к характеристике передающей цепи
T
ut.
), где отношение вычисляется поэлементно. Аналогично, диагональная матрица
K
ut Nut×Nut для пользовательского терминала - это отношение характеристики приемной цепи
R
ut к характеристике передающей цепи
T
ut.
На фиг.2A показано применение матриц коррекции на обеих, передающей и приемной, сторонах в точке доступа и на пользовательском терминале для учета различий в передающей и приемной цепях в точке доступа и на пользовательском терминале. На нисходящей линии связи вектор передачи x dn сначала перемножается с матрицей K tap модулем 112. Обработка в передающей цепи 114 и приемной цепи 154 для нисходящей линии связи такая же, как показана на фиг.1. Выходной сигнал приемной цепи 154 перемножается с матрицей K rut модулем 156, который выдает вектор приема r dn для нисходящей линии связи. На восходящей линии связи вектор передачи x up сначала перемножается с матрицей K tut модулем 162. Обработка на передающей цепи 164 и приемной цепи 124 для восходящей линии связи такая же, как показана на фиг.1. Выходной сигнал приемной цепи 124 перемножается с матрицей K rap модулем 126, который выдает принятый вектор r up, для восходящей линии связи.
Характеристики калиброванных каналов нисходящей и восходящей линии связи с применением матриц коррекции в точке доступа и на пользовательском терминале согласно фиг.2A можно выразить в виде
 и
и 
 Ур. (7)
Ур. (7)
Если  , то два уравнения в системе уравнений (7) можно объединить следующим образом:
, то два уравнения в системе уравнений (7) можно объединить следующим образом:
 Ур. (8)
Ур. (8)
Переставляя члены в уравнении (8), получаем:


 Ур. (9)
Ур. (9)
Диагональные матрицы были поменяны местами в уравнении (9) с использованием свойства AB = BA для диагональных матриц A и В .
Уравнение (9) указывает, что характеристики калиброванных каналов нисходящей и восходящей линии связи можно получить, если выполняются следующие условия:
 и
и Ур. (10a)
Ур. (10a)
 Ур. (10b)
Ур. (10b)
где a - произвольный комплексный коэффициент пропорциональности.
В целом, коэффициенты коррекции для точки доступа можно применять на передающей стороне и/или приемной стороне в точке доступа. Аналогично, коэффициенты коррекции для пользовательского терминала можно применять на передающей стороне и/или приемной стороне на пользовательском терминале. Для данной станции, которая может быть точкой доступа или пользовательским терминалом, матрицу коррекции для этой станции можно разложить на матрицу коррекции для передающей стороны и матрицу коррекции для приемной стороны. Матрица коррекции для одной стороны (которая может быть либо передающей, либо приемной стороной) может представлять собой единичную матрицу I либо произвольно выбранную матрицу. Тогда матрицу коррекции для другой стороны можно задать однозначно. Матрицы коррекции не обязаны непосредственно исправлять ошибки передающей и/или приемной цепи, которые обычно невозможно измерить.
В Таблице 1 приведены девять возможных конфигураций для применения коэффициентов коррекции в точке доступа и на пользовательском терминале. В конфигурации 1 коэффициенты коррекции применяются на обеих, передающей и приемной, сторонах в точке доступа, а также на обеих, передающей и приемной, сторонах на пользовательском терминале. В конфигурации 2 коэффициенты коррекции применяются только на передающей стороне как в точке доступа, так и на пользовательском терминале, где
K
tap=
K
ap,
K
rap=
I
,
K
tut=
K
ut и
K
rut=
I
. В конфигурации 3 коэффициенты коррекции применяются только на приемной стороне как в точке доступа, так и на пользовательском терминале, где  ,
K
tap=
I
,
,
K
tap=
I
,  и
K
tut=
I
. В Таблице 1 показаны и другие конфигурации.
и
K
tut=
I
. В Таблице 1 показаны и другие конфигурации.




































На фиг.2B показано применение матриц коррекции K ap и K ut на передающих сторонах в конфигурации 2 для учета различий в передающей и приемной цепи в точке доступа и на пользовательском терминале. На нисходящей линии связи вектор передачи x dn сначала перемножается с матрицей коррекции K ap модулем 112. Последующая обработка в передающей цепи 114 и приемной цепи 154 для нисходящей линии связи такая же, как показана на фиг.1. На восходящей линии связи вектор передачи x up сначала перемножается с матрицей коррекции K ut модулем 162. Последующая обработка в передающей цепи 164 и приемной цепи 124 для восходящей линии связи такая же, как показана на фиг.1. Тогда характеристики калиброванных каналов нисходящей и восходящей линии связи, наблюдаемых на пользовательском терминале и в точке доступа соответственно, можно выразить в виде
 и
и  Ур. (11)
Ур. (11)
На фиг.2C показано применение матриц коррекции  и
и  на приемных сторонах в конфигурации 3 для учета различий в передающей и приемной цепях в точке доступа и на пользовательском терминале. На нисходящей линии связи вектор передачи
x
dn обрабатывается передающей цепью 114 в точке доступа. Сигналы нисходящей линии связи обрабатываются приемной цепью 154 и дополнительно перемножаются с матрицей коррекции
на приемных сторонах в конфигурации 3 для учета различий в передающей и приемной цепях в точке доступа и на пользовательском терминале. На нисходящей линии связи вектор передачи
x
dn обрабатывается передающей цепью 114 в точке доступа. Сигналы нисходящей линии связи обрабатываются приемной цепью 154 и дополнительно перемножаются с матрицей коррекции  модулем 156 на пользовательском терминале для получения вектора приема
r
dn. На восходящей линии связи вектор передачи
x
up обрабатывается передающей цепью 164 на пользовательском терминале. Сигналы восходящей линии связи обрабатываются приемной цепью 124 и дополнительно перемножаются с матрицей коррекции модулем 126 в точке доступа для получения вектора приема
r
up. Тогда характеристики калиброванных каналов нисходящей и восходящей линии связи, наблюдаемых на пользовательском терминале и в точке доступа соответственно, можно выразить в виде
модулем 156 на пользовательском терминале для получения вектора приема
r
dn. На восходящей линии связи вектор передачи
x
up обрабатывается передающей цепью 164 на пользовательском терминале. Сигналы восходящей линии связи обрабатываются приемной цепью 124 и дополнительно перемножаются с матрицей коррекции модулем 126 в точке доступа для получения вектора приема
r
up. Тогда характеристики калиброванных каналов нисходящей и восходящей линии связи, наблюдаемых на пользовательском терминале и в точке доступа соответственно, можно выразить в виде
 и
и  Ур. (12)
Ур. (12)
Согласно Таблице 1 матрицы коррекции включают в себя значения, позволяющие учитывать различия в передающих и приемных цепях в точке доступа и на пользовательском терминале. Это позволяет выразить канальную характеристику для одной линии связи через канальную характеристику для другой линии связи. Характеристики калиброванных каналов нисходящей и восходящей линии связи могут иметь различные формы в зависимости от того, применяются ли коэффициенты коррекции в точке доступа и на пользовательском терминале. Например, характеристики калиброванных каналов нисходящей и восходящей линии связи можно выразить, как показано в уравнениях (7), (11) и (12).
Калибровка может осуществляться для определения матриц
K
ap и
K
ut. Обычно истинная канальная характеристика
H
и характеристики передающей и приемной цепей неизвестны и не поддаются точному и простому определению. Зато можно оценить эффективные характеристики каналов нисходящей и восходящей линий связи,
H
dn и
Н
uр, на основании пилот-сигналов, передаваемых по нисходящей и восходящей линиям связи соответственно, что описано ниже. В этом случае матрицы коррекции  и
и  , являющиеся оценками "истинных" матриц
K
ap и
K
ut, можно получить на основании оценок характеристик каналов нисходящей линии связи и восходящей линии связи,
, являющиеся оценками "истинных" матриц
K
ap и
K
ut, можно получить на основании оценок характеристик каналов нисходящей линии связи и восходящей линии связи,  и
и  , что описано ниже. Матрицы и включают в себя коэффициенты коррекции, позволяющие учитывать различия в передающих и приемных цепях в точке доступа и на пользовательском терминале. Если передающая и приемная цепи калиброваны, оценку характеристики калиброванного канала, полученную для одной линии связи (например,
, что описано ниже. Матрицы и включают в себя коэффициенты коррекции, позволяющие учитывать различия в передающих и приемных цепях в точке доступа и на пользовательском терминале. Если передающая и приемная цепи калиброваны, оценку характеристики калиброванного канала, полученную для одной линии связи (например,  ), можно использовать для определения оценки характеристики калиброванного канала для другой линии связи (например,
), можно использовать для определения оценки характеристики калиброванного канала для другой линии связи (например,  ).
).
Описанные здесь методы калибровки также можно использовать для систем беспроводной связи, в которых используется OFDM. OFDM эффективно разделяет полный диапазон системы на некоторое количество (NF) ортогональных поддиапазонов, которые также называются тонами, поднесущими, элементами разрешения по частоте или подканалами. В OFDM каждый поддиапазон связан с соответствующей поднесущей, которую можно модулировать данными. Для системы MIMO, где используется OFDM (т.е. системы MIMO-OFDM), каждый поддиапазон каждого пространственного канала можно рассматривать как независимый канал связи.
Калибровка может осуществляться разными способами. Для ясности, конкретная схема калибровки описана ниже для системы MIMO-OFDM с TDD.
На фиг.3 показана логическая блок-схема варианта осуществления процесса 300 для калибровки характеристик каналов нисходящей и восходящей линий связи в системе MIMO-OFDM с TDD. Сначала пользовательский терминал получает хронирование и частоту точки доступа с использованием процедур захвата, определенных для системы (блок 310). Затем пользовательский терминал может послать сообщение для инициирования калибровки с помощью точки доступа, или же калибровку может инициировать точка доступа. Калибровка может осуществляться параллельно с регистрацией/аутентификации пользовательского терминала точкой доступа (например, при установлении вызова), а также может осуществляться всякий раз, когда это оправдано.
Калибровка может осуществляться для всех поддиапазонов, которые можно использовать для передачи данных (которые называются поддиапазонами "данных"). Поддиапазоны, не используемые для передачи данных (например, защитные поддиапазоны), обычно не нуждаются в калибровке. Однако, поскольку частотные характеристики передающей и приемной цепей в точке доступа и на пользовательском терминале обычно являются плоскими в большинстве поддиапазонов, представляющих интерес, и поскольку соседние поддиапазоны, скорее всего, коррелируют, калибровка может осуществляться только для подмножества поддиапазона данных. Если калибруются не все поддиапазоны данных, то поддиапазоны, подлежащие калибровке (которые называются "назначенные" поддиапазоны), можно сообщать на точку доступа (например, в сообщении, передаваемом для инициирования калибровки).
Для калибровки пользовательский терминал передает пилот-сигнал MIMO в назначенных поддиапазонах на точку доступа (блок 312). Генерация пилот-сигнала MIMO подробно описана ниже. Длительность передачи пилот-сигнала MIMO на восходящей линии связи может зависеть от количества назначенных поддиапазонов. Например, может быть достаточно 8 символов OFDM, если калибровка осуществляется для четырех поддиапазонов, и больше (например, 20) символов OFDM может потребоваться для большего количества поддиапазонов. Полная передаваемая мощность обычно фиксирована. Если пилот-сигнал MIMO передается в малом количестве поддиапазонов, то можно использовать более высокие значения передаваемой мощности для каждого из этих поддиапазонов, и SNR для каждого поддиапазона повышается. Напротив, если пилот-сигнал MIMO передается в большом количестве поддиапазонов, то можно использовать меньшие значения передаваемой мощности для каждого поддиапазона, и SNR для каждого поддиапазона снижается. Если SNR каждого поддиапазона недостаточно велик, то можно передавать больше символов OFDM для пилот-сигнала MIMO и суммировать их на приемнике для получения более высокого общего SNR для поддиапазона.
Точка доступа принимает пилот-сигнал MIMO восходящей линии связи и выводит оценку характеристики канала восходящей линии связи,  , для каждого из назначенных поддиапазонов, где k представляет индекс поддиапазона. Оценка канала на основании пилот-сигнала MIMO описана ниже. Оценки характеристик каналов восходящей линии связи квантуются и передаются на пользовательский терминал (блок 314). Элементы каждой матрицы
, для каждого из назначенных поддиапазонов, где k представляет индекс поддиапазона. Оценка канала на основании пилот-сигнала MIMO описана ниже. Оценки характеристик каналов восходящей линии связи квантуются и передаются на пользовательский терминал (блок 314). Элементы каждой матрицы  являются комплексными коэффициентами усиления каналов между Nut передающими и Nap приемными антеннами для восходящей линии связи в поддиапазоне k. Для получения нужного динамического диапазона коэффициенты усиления каналов для всех матриц можно масштабировать с конкретным масштабным коэффициентом, общим для всех назначенных поддиапазонов. Например, коэффициенты усиления каналов в каждой матрице
являются комплексными коэффициентами усиления каналов между Nut передающими и Nap приемными антеннами для восходящей линии связи в поддиапазоне k. Для получения нужного динамического диапазона коэффициенты усиления каналов для всех матриц можно масштабировать с конкретным масштабным коэффициентом, общим для всех назначенных поддиапазонов. Например, коэффициенты усиления каналов в каждой матрице  можно масштабировать обратно пропорционально самому большому коэффициенту усиления канала для всех матриц
можно масштабировать обратно пропорционально самому большому коэффициенту усиления канала для всех матриц  в назначенных поддиапазонах, чтобы наибольший коэффициент усиления канала имел модуль, равный единице. Поскольку целью калибровки является нормирование коэффициента усиления/разности фаз между каналами нисходящей линии связи и восходящей линии связи, абсолютные коэффициенты усиления каналов не важны. Если в качестве коэффициентов усиления каналов используются 12-битовые комплексные значения (т.е. имеющие 12-битовые синфазные (I) и 12-битовые квадратурные (Q) составляющие), то оценки характеристик каналов нисходящей линии связи можно передавать на пользовательский терминал в 3·Nut·Nap·Nsb байтах, где "3" используется для 24 битов в целом, используемых для представления составляющих I и Q, и Nsb - это количество назначенных поддиапазонов.
в назначенных поддиапазонах, чтобы наибольший коэффициент усиления канала имел модуль, равный единице. Поскольку целью калибровки является нормирование коэффициента усиления/разности фаз между каналами нисходящей линии связи и восходящей линии связи, абсолютные коэффициенты усиления каналов не важны. Если в качестве коэффициентов усиления каналов используются 12-битовые комплексные значения (т.е. имеющие 12-битовые синфазные (I) и 12-битовые квадратурные (Q) составляющие), то оценки характеристик каналов нисходящей линии связи можно передавать на пользовательский терминал в 3·Nut·Nap·Nsb байтах, где "3" используется для 24 битов в целом, используемых для представления составляющих I и Q, и Nsb - это количество назначенных поддиапазонов.
Пользовательский терминал также принимает пилот-сигнал MIMO нисходящей линии связи, передаваемый точкой доступа (блок 316), и выводит оценку характеристики канала нисходящей линии связи,  , для каждого из назначенных поддиапазонов на основании принятого пилот-сигнала (блок 318). Затем пользовательский терминал определяет коэффициенты коррекции,
, для каждого из назначенных поддиапазонов на основании принятого пилот-сигнала (блок 318). Затем пользовательский терминал определяет коэффициенты коррекции,  и
и  для каждого из назначенных поддиапазонов на основании оценок характеристик каналов восходящей линии связи и нисходящей линии связи,
для каждого из назначенных поддиапазонов на основании оценок характеристик каналов восходящей линии связи и нисходящей линии связи,  и
и  (блок 320).
(блок 320).
Для вывода коэффициентов коррекции характеристики каналов нисходящей и восходящей линий связи для каждого поддиапазона предполагаются обратными друг другу величинам, с коррекциями коэффициента усиления/фазы для учета различий в передающих и приемных цепях в точке доступа и на пользовательском терминале, следующим образом:
 для k∈K,
для k∈K, Ур. (13)
Ур. (13)
где K представляет множество всех поддиапазонов данных. Поскольку в ходе калибровки для назначенных поддиапазонов доступны только оценки эффективных характеристик каналов нисходящей и восходящей линий связи, уравнение (13) можно переписать следующим образом:
 для k∈K',
Ур. (14)
для k∈K',
Ур. (14)
где K' представляет множество всех назначенных поддиапазонов. Вектор коррекции  можно задать так, чтобы он включал в себя Nut диагональных элементов
можно задать так, чтобы он включал в себя Nut диагональных элементов  . Таким образом,
. Таким образом,  и
и  эквивалентны. Аналогично, вектор коррекции
эквивалентны. Аналогично, вектор коррекции  можно задать так, чтобы он включал в себя Nap диагональных элементов
можно задать так, чтобы он включал в себя Nap диагональных элементов  .
.  и
и  также эквивалентны.
также эквивалентны.
Коэффициенты коррекции  и
и  можно выводить из канальных оценок
можно выводить из канальных оценок  и
и  разными способами, в том числе путем вычисления отношения матриц и вычисления MMSE. Оба эти методы вычисления описаны более подробно ниже. Можно использовать и другие методы вычисления, что отвечает объему изобретения.
разными способами, в том числе путем вычисления отношения матриц и вычисления MMSE. Оба эти методы вычисления описаны более подробно ниже. Можно использовать и другие методы вычисления, что отвечает объему изобретения.
A. Вычисление отношения матриц
На фиг.4 показана логическая блок-схема варианта осуществления процесса 320a вывода векторов коррекции  и
и  из оценок характеристик каналов восходящей линии связи и нисходящей линии связи
из оценок характеристик каналов восходящей линии связи и нисходящей линии связи  и
и  с использованием вычисления отношения матриц. Процесс 320a можно использовать в блоке 320 на фиг.3.
с использованием вычисления отношения матриц. Процесс 320a можно использовать в блоке 320 на фиг.3.
Первоначальн, матрица C (k) Nut×Nap вычисляется для каждого назначенного поддиапазона (блок 412) следующим образом:
 для k∈K',Ур. (15)
для k∈K',Ур. (15)
где отношение берется поэлементно. Таким образом, каждый элемент C (k) можно вычислять следующим образом:
 для i=1,…, Nut и j=1,…, Nap, Ур. (16)
для i=1,…, Nut и j=1,…, Nap, Ур. (16)
где  и
и  - это (i, j)-й элемент (строка, столбец) матрицы
- это (i, j)-й элемент (строка, столбец) матрицы  и
и  , соответственно и c
i,j(k) - это (i, j)-й элемент матрицы
C
(k).
, соответственно и c
i,j(k) - это (i, j)-й элемент матрицы
C
(k).
Согласно варианту осуществления вектор коррекции для точки доступа,  , задан равным среднему нормированных строк
C
(k) и выводится блоком 420. Каждая строка
C
(k) сначала нормируется путем масштабирования каждого из Nap элементов строки с первым элементом строки (блок 422). Таким образом, если
, задан равным среднему нормированных строк
C
(k) и выводится блоком 420. Каждая строка
C
(k) сначала нормируется путем масштабирования каждого из Nap элементов строки с первым элементом строки (блок 422). Таким образом, если  - это i-я строка матрицы
C
(k), то нормированную строку
- это i-я строка матрицы
C
(k), то нормированную строку  можно выразить в виде
можно выразить в виде
 Ур. (17)
Ур. (17)
Среднее нормированных строк затем определяется как сумма Nut нормированных строк, деленная на Nut (блок 424). Вектор коррекции  задается равным этому среднему (блок 426), что можно выразить в виде
задается равным этому среднему (блок 426), что можно выразить в виде
 для k∈K'.
Ур. (18)
для k∈K'.
Ур. (18)
Вследствие нормирования первый элемент  равен единице.
равен единице.
Согласно варианту осуществления вектор коррекции для пользовательского терминала,  , задан равным среднему обратных величин нормированных столбцов матрицы
C
(k) и выводится блоком 430. Сначала j-й столбец матрицы
C
(k) нормируется путем масштабирования каждого элемента столбца с j-м элементом вектора
, задан равным среднему обратных величин нормированных столбцов матрицы
C
(k) и выводится блоком 430. Сначала j-й столбец матрицы
C
(k) нормируется путем масштабирования каждого элемента столбца с j-м элементом вектора  , который обозначается как K
up,j,,j(k) (блок 432). Таким образом, если
, который обозначается как K
up,j,,j(k) (блок 432). Таким образом, если  - это j-й столбец матрицы
C
(k), то нормированный столбец
- это j-й столбец матрицы
C
(k), то нормированный столбец  можно выразить в виде
можно выразить в виде
 Ур. (19)
Ур. (19)
Тогда среднее обратных величин нормированных столбцов определяется как сумма обратных величин Nap нормированных столбцов, деленная на Nap (блок 434). Вектор коррекции  задается равным этому среднему (блок 436), что можно выразить в виде
задается равным этому среднему (блок 436), что можно выразить в виде
 для k∈K',
для k∈K', Ур. (20)
Ур. (20)
где обращение нормированных столбцов, осуществляется поэлементно.
B. Вычисление MMSE
Для вычисления MMSE коэффициенты коррекции  и
и  выводятся из оценок характеристик каналов нисходящей линии связи и восходящей линии связи
выводятся из оценок характеристик каналов нисходящей линии связи и восходящей линии связи  и
и  , для которых среднеквадратическая ошибка (MSE) между характеристикой калиброванного канала нисходящей линии связи и характеристикой калиброванного канала восходящей линии связи минимальна. Это условие можно выразить в виде
, для которых среднеквадратическая ошибка (MSE) между характеристикой калиброванного канала нисходящей линии связи и характеристикой калиброванного канала восходящей линии связи минимальна. Это условие можно выразить в виде
 для k∈K,Ур. (21)
для k∈K,Ур. (21)
что также можно записать в виде
 для k∈K,
для k∈K,
где  , поскольку
, поскольку  - это диагональная матрица.
- это диагональная матрица.
На уравнение (21) накладывается ограничение, согласно которому первый элемент матрицы  задан равным единице, или K
ap,0,0(k)=1. Без этого ограничения имело бы место тривиальное решение, в котором все элементы матриц
задан равным единице, или K
ap,0,0(k)=1. Без этого ограничения имело бы место тривиальное решение, в котором все элементы матриц  и
и  равны нулю. В уравнении (21) сначала получается матрица
Y
(k) как
равны нулю. В уравнении (21) сначала получается матрица
Y
(k) как  . Затем получается квадрат абсолютного значения для каждого из Nap·Nut элементов матрицы
Y
(k). Тогда среднеквадратическая ошибка (или квадратическая ошибка, поскольку деление Nap·Nut опущено) равна сумме всех Nap·Nut значений квадратов.
. Затем получается квадрат абсолютного значения для каждого из Nap·Nut элементов матрицы
Y
(k). Тогда среднеквадратическая ошибка (или квадратическая ошибка, поскольку деление Nap·Nut опущено) равна сумме всех Nap·Nut значений квадратов.
Вычисление MMSE осуществляется для каждого назначенного поддиапазона для получения коэффициентов коррекции  и
и  для этого поддиапазона. Вычисление MMSE для одного поддиапазона описано ниже. Для простоты индекс k поддиапазона опущен в нижеследующем описании. Также для простоты элементы оценки характеристики канала нисходящей линии связи
для этого поддиапазона. Вычисление MMSE для одного поддиапазона описано ниже. Для простоты индекс k поддиапазона опущен в нижеследующем описании. Также для простоты элементы оценки характеристики канала нисходящей линии связи  обозначены как {a
ij}, элементы оценки характеристики канала восходящей линии связи
обозначены как {a
ij}, элементы оценки характеристики канала восходящей линии связи  обозначены как {b
ij}, диагональные элементы матрицы
обозначены как {b
ij}, диагональные элементы матрицы  обозначены как {u
i} и диагональные элементы матрицы
обозначены как {u
i} и диагональные элементы матрицы  обозначены как {v
j}, где i=1,…,Nap и j=1,…, Nut.
обозначены как {v
j}, где i=1,…,Nap и j=1,…, Nut.
Среднеквадратическую ошибку можно выразить из уравнения (21) следующим образом:
 Ур. (22)
Ур. (22)
опять же с ограничением u 1=1. Минимальную среднеквадратическую ошибку можно получить, взяв частные производные уравнения (22) по u и v и задав частные производные равными нулю. Результатом этих операций являются следующие системы уравнений:
 для i=2,…,Nap иУр. (23a)
для i=2,…,Nap иУр. (23a)
 для j=1,…, Nut.Ур. (23b)
для j=1,…, Nut.Ур. (23b)
В уравнении (23a), u 1=1, поэтому в данном случае частные производные отсутствуют, и индекс i принимает значения от 2 до Nap.
Систему (Nap+Nut-1) уравнений в системах уравнений (23a) и (23b) удобнее выразить в матричном виде следующим образом:
 Ур. (24)
Ур. (24)
где


Матрица
A
включает в себя (Nap+Nut-1) строк, причем первые Nap-1 строк соответствуют Nap-1 уравнениям из системы уравнений (23a) и последние Nut строк соответствуют Nut уравнениям из системы уравнений (23b). В частности, первая строка матрицы
A
получается из системы уравнений (23a) с i=2, вторая строка получается с i=3 и т.д. Nap-я строка матрицы
A
получается из системы уравнений (23b) с j=1 и т.д. и последняя строка получается с j=Nut. Как показано выше, элементы матрицы
A
и элементы вектора
z
можно получить на основании элементов матриц  и
и  .
.
Матрица
A
включает в себя (Nap+Nut-1) строк, причем первые Nap-1 строк соответствуют Nap-1 уравнениям из системы уравнений (23a) и последние Nut строк соответствуют Nut уравнениям из системы уравнения (23b). В частности, первая строка матрицы
A
получается из системы уравнений (23a) с i=2, вторая строка получается с i=3 и т.д. Nap-я строка матрицы
A
получается из системы уравнений (23b) с j=1 и т.д. и последняя строка получается с j=Nut. Как показано выше, элементы матрицы
A
и элементы вектора
z
можно получить на основании элементов матриц и .
Коэффициенты коррекции входят в вектор у , который можно получить как
 Ур. (25)
Ур. (25)
Результатами вычисления MMSE являются матрицы коррекции  и
и  , которые минимизируют среднеквадратическую ошибку в характеристиках калиброванных каналов нисходящей и восходящей линии связи, как показано в уравнении (21). Поскольку матрицы
, которые минимизируют среднеквадратическую ошибку в характеристиках калиброванных каналов нисходящей и восходящей линии связи, как показано в уравнении (21). Поскольку матрицы  и
и  получаются на основании оценок характеристик каналов нисходящей линии связи и восходящей линии связи,
получаются на основании оценок характеристик каналов нисходящей линии связи и восходящей линии связи,  и
и  , качество матриц коррекции
, качество матриц коррекции  и
и  зависит от качества канальных оценок
зависит от качества канальных оценок  и
и  . Пилот-сигнал MIMO можно усреднять на приемнике для получения более точных оценок для
. Пилот-сигнал MIMO можно усреднять на приемнике для получения более точных оценок для  и
и  .
.
Матрицы коррекции,  и
и  , полученные на основании вычисления MMSE, в целом лучше, чем матрицы коррекции, полученные на основании вычисления отношения матриц, особенно когда некоторые коэффициенты усиления каналов малы и шум измерения может сильно снижать коэффициенты усиления каналов.
, полученные на основании вычисления MMSE, в целом лучше, чем матрицы коррекции, полученные на основании вычисления отношения матриц, особенно когда некоторые коэффициенты усиления каналов малы и шум измерения может сильно снижать коэффициенты усиления каналов.
C. Последующее вычисление
Независимо от конкретного метода вычисления, выбранного для использования, по завершении вычисления матриц коррекции пользовательский терминал передает на точку доступа векторы коррекции для точки доступа,  , для всех назначенных поддиапазонов. Если 12-битовые комплексные значения используются для каждого коэффициента коррекции в
, для всех назначенных поддиапазонов. Если 12-битовые комплексные значения используются для каждого коэффициента коррекции в  , то векторы коррекции
, то векторы коррекции  для всех назначенных поддиапазонов можно передавать на точку доступа в 3·(Nap-1)·Nsb - байтах, где "3" используется для 24 битов в целом, используемых для представления составляющих I и Q, (Nap-1) получается потому, что первый элемент каждого вектора
для всех назначенных поддиапазонов можно передавать на точку доступа в 3·(Nap-1)·Nsb - байтах, где "3" используется для 24 битов в целом, используемых для представления составляющих I и Q, (Nap-1) получается потому, что первый элемент каждого вектора  равен единице и потому не подлежит передаче, и Nsb - это количество назначенных поддиапазонов. Если первый элемент задан равным 29-1=+511, то имеется запас в 12 дБ (поскольку максимальное положительное знаковое 12-битовое значение равно 211-1=+2047), который позволяет компенсировать рассогласование по коэффициенту усиления до 12 дБ между нисходящей и восходящей линиями связи с помощью 12-битовых значений. Если нисходящая и восходящая линии связи согласованы в пределах 12 дБ и первый элемент нормирован к значению 511, то другие элементы не должны превышать 511·4=2044 по абсолютной величине и могут быть представлены 12 битами.
равен единице и потому не подлежит передаче, и Nsb - это количество назначенных поддиапазонов. Если первый элемент задан равным 29-1=+511, то имеется запас в 12 дБ (поскольку максимальное положительное знаковое 12-битовое значение равно 211-1=+2047), который позволяет компенсировать рассогласование по коэффициенту усиления до 12 дБ между нисходящей и восходящей линиями связи с помощью 12-битовых значений. Если нисходящая и восходящая линии связи согласованы в пределах 12 дБ и первый элемент нормирован к значению 511, то другие элементы не должны превышать 511·4=2044 по абсолютной величине и могут быть представлены 12 битами.
Для каждого назначенного поддиапазона получается пара векторов коррекции  и
и  . Калибровка может осуществляться не для всех поддиапазонов данных. Например, калибровка может осуществляться для каждого n-го поддиапазона, где n можно определить по ожидаемым характеристикам передающей и приемной цепей (например, n может быть равно 2, 4, 8, 16, и т.д.). Калибровка также может осуществляться для неоднородно распределенных поддиапазонов. Например, поскольку на границах полосы пропускания фильтра может наблюдаться спад, который может приводить к дополнительному рассогласованию между передающей и приемной цепями, можно калибровать больше поддиапазонов вблизи границ полосы. В целом, можно калибровать любое количество поддиапазонов с любым распределением, что отвечает объему изобретения.
. Калибровка может осуществляться не для всех поддиапазонов данных. Например, калибровка может осуществляться для каждого n-го поддиапазона, где n можно определить по ожидаемым характеристикам передающей и приемной цепей (например, n может быть равно 2, 4, 8, 16, и т.д.). Калибровка также может осуществляться для неоднородно распределенных поддиапазонов. Например, поскольку на границах полосы пропускания фильтра может наблюдаться спад, который может приводить к дополнительному рассогласованию между передающей и приемной цепями, можно калибровать больше поддиапазонов вблизи границ полосы. В целом, можно калибровать любое количество поддиапазонов с любым распределением, что отвечает объему изобретения.
Если калибровка осуществляется не для всех поддиапазонов данных, то коэффициенты коррекции для "некалиброванных" поддиапазонов можно получить путем интерполяции коэффициентов коррекции, полученных для назначенных поддиапазонов. Точка доступа может осуществлять интерполяцию на  , для k∈K', для получения векторов коррекции
, для k∈K', для получения векторов коррекции  , для k∈K. Аналогично, пользовательский терминал может осуществлять интерполяцию на
, для k∈K. Аналогично, пользовательский терминал может осуществлять интерполяцию на  , для k∈K', для получения векторов коррекции
, для k∈K', для получения векторов коррекции  , для k∈K.
, для k∈K.
После этого точка доступа и пользовательский терминал используют свои соответствующие векторы коррекции  и
и  или соответствующие матрицы коррекции
или соответствующие матрицы коррекции  и
и  , для k∈K. Точка доступа может выводить матрицу коррекции
, для k∈K. Точка доступа может выводить матрицу коррекции  для своей передающей стороны и матрицу коррекции
для своей передающей стороны и матрицу коррекции  для своей приемной стороны на основании своей матрицы коррекции
для своей приемной стороны на основании своей матрицы коррекции  и с ограничением, показанным в уравнении (10a). Аналогично, пользовательский терминал может выводить матрицу коррекции
и с ограничением, показанным в уравнении (10a). Аналогично, пользовательский терминал может выводить матрицу коррекции  для своей передающей стороны и матрицу коррекции
для своей передающей стороны и матрицу коррекции  для своей приемной стороны на основании своей матрицы коррекции
для своей приемной стороны на основании своей матрицы коррекции  и с ограничением, показанным в уравнении (10b).
и с ограничением, показанным в уравнении (10b).
Матрицу коррекции  и матрицу коррекции
и матрицу коррекции  можно разложить на две матрицы для увеличения динамического диапазона, уменьшения ошибки квантования, учета ограничений передающей и приемной цепей и т.д. При наличии известного дисбаланса на передающей стороне, можно попытаться устранить этот дисбаланс с помощью матрицы коррекции на передающей стороне. Например, если одна антенна имеет более слабый усилитель мощности, то передаваемую мощность антенны с более сильным усилителем мощности можно снизить, применяя соответствующую матрицу коррекции на передающей стороне. Однако работа передающей стороны на пониженном уровне мощности приводит к потере производительности. Поэтому регулировку можно производить на приемной стороне, чтобы компенсировать известный дисбаланс передачи. Если передающая и приемная цепи имеют меньшие коэффициенты усиления для данной антенны, например, вследствие меньшего коэффициента усиления антенны, то калибровка не дает никакой регулировки для этой антенны, поскольку приемная и передающая стороны согласованы.
можно разложить на две матрицы для увеличения динамического диапазона, уменьшения ошибки квантования, учета ограничений передающей и приемной цепей и т.д. При наличии известного дисбаланса на передающей стороне, можно попытаться устранить этот дисбаланс с помощью матрицы коррекции на передающей стороне. Например, если одна антенна имеет более слабый усилитель мощности, то передаваемую мощность антенны с более сильным усилителем мощности можно снизить, применяя соответствующую матрицу коррекции на передающей стороне. Однако работа передающей стороны на пониженном уровне мощности приводит к потере производительности. Поэтому регулировку можно производить на приемной стороне, чтобы компенсировать известный дисбаланс передачи. Если передающая и приемная цепи имеют меньшие коэффициенты усиления для данной антенны, например, вследствие меньшего коэффициента усиления антенны, то калибровка не дает никакой регулировки для этой антенны, поскольку приемная и передающая стороны согласованы.
Вышеописанная схема калибровки, позволяющая получить вектор коэффициентов коррекции как для точки доступа, так и для пользовательского терминала, дает возможность вывести "совместимые" векторы коррекции для точки доступа при осуществлении калибровки разными пользовательскими терминалами. Если точка доступа уже откалибрована (например, одним или несколькими другими пользовательскими терминалами), то текущие векторы коррекции можно обновить вновь выведенными векторами коррекции.
Например, если два пользовательских терминала одновременно осуществляют процедуру калибровки, то результаты калибровки от этих пользовательских терминалов можно усреднить для повышения производительности. Однако калибровка обычно осуществляется каждый раз для одного пользовательского терминала. При этом второй пользовательский терминал наблюдает нисходящую линию связи с уже примененным вектором коррекции для первого пользовательского терминала. В этом случае произведение второго вектора коррекции и старого вектора коррекции можно использовать в качестве нового вектора коррекции или можно также использовать "взвешенное усреднение" (описанное ниже). Точка доступа обычно использует один вектор коррекции для всех пользовательских терминалов, а не разные для разных пользовательских терминалов (хотя это тоже можно реализовать). Обновления от множественных пользовательских терминалов или последовательные обновления от одного пользовательского терминала можно обрабатывать одинаково. Обновленные векторы можно непосредственно применять (посредством операции умножения). Альтернативно, если некоторое усреднение желательно для снижения шума измерения, то можно использовать взвешенное усреднение, что описано ниже.
Если точка доступа использует векторы коррекции  для передачи пилот-сигнал MIMO, из которого пользовательский терминал определяет новые векторы коррекции
для передачи пилот-сигнал MIMO, из которого пользовательский терминал определяет новые векторы коррекции  , то обновленные векторы коррекции
, то обновленные векторы коррекции  получаются перемножением текущего и нового векторов коррекции. Векторы коррекции
получаются перемножением текущего и нового векторов коррекции. Векторы коррекции  и
и  могут выводиться одним и тем же или разными пользовательскими терминалами. Согласно одному варианту осуществления обновленные векторы коррекции задаются как
могут выводиться одним и тем же или разными пользовательскими терминалами. Согласно одному варианту осуществления обновленные векторы коррекции задаются как  , где умножение осуществляется поэлементно. В другом варианте осуществления обновленные векторы коррекции задаются как
, где умножение осуществляется поэлементно. В другом варианте осуществления обновленные векторы коррекции задаются как  , где α - это коэффициент, используемый для осуществления взвешенного усреднения (например, 0<α<1). Если калибровка обновляется не часто, то наилучшим будет значение α, близкое к единице. Если калибровка обновляется часто, но с шумом, то лучше применять меньшее значение α. Точка доступа может использовать обновленные векторы коррекции
, где α - это коэффициент, используемый для осуществления взвешенного усреднения (например, 0<α<1). Если калибровка обновляется не часто, то наилучшим будет значение α, близкое к единице. Если калибровка обновляется часто, но с шумом, то лучше применять меньшее значение α. Точка доступа может использовать обновленные векторы коррекции  , пока они вновь не обновятся.
, пока они вновь не обновятся.
Как показано в уравнениях (10a) и (10b), коэффициенты коррекции для данной станции (которая может быть точкой доступа или пользовательским терминалом) учитывают характеристики передающей и приемной цепи на этой станции. Точка доступа может осуществлять калибровку с помощью первого пользовательского терминала для вывода своих коэффициентов коррекции и затем использовать эти коэффициенты коррекции для связи со вторым пользовательским терминалом без необходимости осуществлять калибровку с помощью второго пользовательского терминала. Аналогично, пользовательский терминал может осуществлять калибровку с помощью первой точки доступа для вывода своих коэффициентов коррекции и затем использовать эти коэффициенты коррекции для связи со второй точкой доступа без необходимости осуществлять калибровку с помощью второй точки доступа. Это позволяет снизить служебную нагрузку калибровки для точки доступа, которая осуществляет связь с множественными пользовательскими терминалами, и для пользовательского терминала, который осуществляет связь с множественными точками доступа, поскольку калибровка не требуется для каждой пары станций, осуществляющих связь друг с другом.
В вышеприведенном описании векторы коррекции  и
и  , для k∈K', выводятся пользовательским терминалом, и векторы
, для k∈K', выводятся пользовательским терминалом, и векторы  передаются обратно на точку доступа. Преимущество этой схемы состоит в распределении обработки калибровки между пользовательскими терминалами системы множественного доступа. Однако векторы коррекции
передаются обратно на точку доступа. Преимущество этой схемы состоит в распределении обработки калибровки между пользовательскими терминалами системы множественного доступа. Однако векторы коррекции  и
и  также может выводить точка доступа, которая будет передавать векторы
также может выводить точка доступа, которая будет передавать векторы  обратно на пользовательский терминал, что отвечает объему изобретения.
обратно на пользовательский терминал, что отвечает объему изобретения.
Вышеописанная схема калибровки позволяет каждому пользовательскому терминалу калибровать свои передающую и приемную цепи в реальном времени посредством радиопередачи. Это позволяет пользовательским терминалам с разными частотными характеристиками достигать высокой производительности без необходимости в жестких технических условиях на частотную характеристику или в осуществлении калибровки в заводских условиях. Точку доступа можно калибровать посредством множественных пользовательских терминалов для обеспечения повышенной точности.
D. Соображения относительно коэффициента усиления
Калибровка может осуществляться на основании "нормализованных" коэффициентов усиления для каналов нисходящей и восходящей линий связи, т.е. коэффициентов усиления, заданных относительно уровня шума на приемнике. Использование нормированных коэффициентов усиления позволяет получать параметры линии связи (например, коэффициенты усиления канала и SNR для каждого пространственного канала) на основании измерений коэффициента усиления для другой линии связи, после калибровки нисходящей и восходящей линий связи.
Точка доступа и пользовательский терминал могут первоначально сбалансировать входные уровни своих приемников таким образом, чтобы уровни шума на приемных трактах точки доступа и пользовательского терминала были примерно одинаковыми. Балансировку можно производить путем оценивания уровня шума, например путем отыскания участка принятого кадра TDD (который является единицей передачи по нисходящей линии связи/восходящей линии связи), который имеет минимальную среднюю мощность в течение определенного промежутка времени (например, одного или двух периодов символа). В общем случае, время непосредственно перед началом каждого кадра TDD свободно от передач, поскольку любые данные восходящей линии связи должны приниматься точкой доступа, и затем необходимо время реверсирования направления приема/передачи до того, как точка доступа начнет передавать по нисходящей линии связи. В зависимости от условий помех уровень шума можно определить на основании количества кадров TDD. Затем характеристики каналов нисходящей и восходящей линий связи измеряются относительно этого уровня шума. В частности, можно сначала получить коэффициент усиления канала для данного поддиапазона данной пары передающей и приемной антенн, например, как отношение принятого символа пилот-сигнала к переданному символу пилот-сигнала для этого поддиапазона этой пары передающей и приемной антенн. Тогда нормированный коэффициент усиления равен измеренному коэффициенту усиления, деленному на уровень шума.
Большое различие в нормированных коэффициентах усиления для точки доступа и нормированных коэффициентах усиления для пользовательского терминала могут привести к тому, что коэффициенты коррекции для пользовательского терминала будут сильно отличаться от единицы. Коэффициенты коррекции для точки доступа близки к единице, поскольку первый элемент матрицы  задан равным 1.
задан равным 1.
Если коэффициенты коррекции для пользовательского терминала сильно отличаются от единицы, то пользовательский терминал может оказаться неспособен применить вычисленные коэффициенты коррекции. Дело в том, что пользовательский терминал имеет ограничение на свою максимальную передаваемую мощность и может оказаться неспособен увеличить свою передаваемую мощность в соответствии с большими коэффициентами коррекции. Кроме того, снижение передаваемой мощности в соответствии с малыми коэффициентами коррекции обычно нежелательно, поскольку это может привести к снижению достижимой скорости передачи данных.
Таким образом, пользовательский терминал может передавать с использованием масштабированной версии вычисленных коэффициентов коррекции. Масштабные коэффициенты калибровки можно получить путем масштабирования вычисленных коэффициентов коррекции с конкретным значением масштабирования, которое можно задать равным дельте коэффициента усиления (разности или отношению) между характеристиками каналов нисходящей и восходящей линий связи. Эту дельту коэффициента усиления можно вычислить как среднее различий (или дельт) между нормированными коэффициентами усиления для нисходящей и восходящей линий связи. Значение масштабирования (или дельта коэффициента усиления), используемое для коэффициентов коррекции для пользовательского терминала, можно передавать на точку доступа совместно с вычисленными коэффициентами коррекции для точки доступа.
С помощью коэффициентов коррекции и значения масштабирования или дельты коэффициента усиления параметры канала нисходящей линии связи можно определить из измеренной характеристики канала восходящей линии связи и наоборот. Если уровень шума на точке доступа или на пользовательском терминале меняется, то дельту коэффициента усиления можно обновить и обновленную дельту коэффициента усиления можно передать в сообщении на другую сущность.
Согласно вышеприведенному описанию калибровка приводит к созданию двух множеств (векторов или матриц) коэффициентов коррекции для каждого поддиапазона, причем одно множество,  , используется точкой доступа, а другое множество,
, используется точкой доступа, а другое множество,  , используется пользовательским терминалом. Точка доступа может применять свои коэффициенты коррекции
, используется пользовательским терминалом. Точка доступа может применять свои коэффициенты коррекции  на передающей стороне и/или приемной стороне, как описано выше. Пользовательский терминал также может применять свои коэффициенты коррекции
на передающей стороне и/или приемной стороне, как описано выше. Пользовательский терминал также может применять свои коэффициенты коррекции  на передающей стороне и/или приемной стороне. В целом, калибровка осуществляется так, чтобы характеристики калиброванных каналов нисходящей и восходящей линии связи были взаимно обратными величинами, независимо от того, где применяются коэффициенты коррекции.
на передающей стороне и/или приемной стороне. В целом, калибровка осуществляется так, чтобы характеристики калиброванных каналов нисходящей и восходящей линии связи были взаимно обратными величинами, независимо от того, где применяются коэффициенты коррекции.
2. Пилот-сигнал MIMO
Для калибровки пилот-сигнал MIMO передается по восходящей линии связи пользовательским терминалом, чтобы точка доступа могла оценить характеристику канала восходящей линии связи, и пилот-сигнал MIMO передается по нисходящей линии связи точкой доступа, чтобы пользовательский терминал мог оценить характеристику канала нисходящей линии связи. Пилот-сигнал MIMO - это пилот-сигнал, состоящий из NT передач пилот-сигнала, передаваемых с NT передающих антенн, причем передача пилот-сигнала с каждой передающей антенны может быть идентифицирована принимающей станцией. Пилот-сигнал MIMO можно генерировать и передавать разными способами. Для нисходящей и восходящей линий связи можно использовать один и тот же или разные пилот-сигналы MIMO. В любом случае, пилот-сигналы MIMO, используемые для нисходящей и восходящей линий связи, известны как на точке доступа, так и на пользовательском терминале.
Согласно варианту осуществления пилот-сигнал MIMO содержит конкретный символ OFDM (обозначаемый "P"), который передается для каждой из NT передающих антенн, где NT=Nap для нисходящей линии связи и NT=Nut для восходящей линии связи. Для каждой передающей антенны один и тот же символ OFDM P передается в течение каждого периода символа, назначенного для передачи пилот-сигнала MIMO. Однако символы OFDM P для каждой антенны покрываются разными N-чиповыми последовательностями Уолша, назначенными для этой антенны, где N≥Nap для нисходящей линии связи и N≥Nut для восходящей линии связи. Покрытие Уолша поддерживает ортогональность между NT передающими антеннами и позволяет приемнику отличать передающие антенны друг от друга.
Символ OFDM P включает в себя дин символ модуляции для каждого из Nsb назначенных поддиапазонов. Таким образом, символ OFDM P содержит конкретное "слово" из Nsb символов модуляции, которое может быть выбрано для облегчения оценки канала приемником. Это слово также может быть задано для минимизации отношение пикового значения к среднему в переданном пилот-сигнале MIMO. Это позволяет уменьшать величину искажения и нелинейности, возникающих в передающей и приемной цепях, что, в свою очередь, может приводить к повышению точности оценки канала.
Для ясности, ниже описан конкретный пилот-сигнал MIMO для конкретной системы MIMO-OFDM. Для этой системы точка доступа и пользовательский терминал имеют по четыре передающих/приемных антенны. Диапазон системы делится на 64 ортогональных поддиапазона, т.е. NF=64, которым присвоены индексы от +31 до -32. Из этих 64 поддиапазонов 48 поддиапазонов (например, с индексами ±{1,…, 6, 8,…, 20, 22,…, 26}) используются для данных, 4 поддиапазона (например, с индексами ±{7, 21}) используются для пилот-сигнала и, возможно, сигнализации, остальные поддиапазоны также не используются и служат защитными поддиапазонами. Эта структура поддиапазонов OFDM более подробно описана в документе по стандарту 802.11a IEEE, озаглавленном "Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) specifications: High-speed Physical Layer in the 5 GHz Band," сентябрь 1999 г., доступном широкой публике.
Символ OFDM P включает в себя множество из 52 символов модуляции QPSK для 48 поддиапазонов данных и 4 поддиапазонов канала пилот-сигнала. Этот символ OFDM P можно задать следующим образом:
где g - коэффициент усиления пилот-сигнала. Значения в скобках {} заданы для индексов поддиапазона от -32 до -1 (для первой строки) и от 0 до +31 (для второй строки). Таким образом, первая строка для P(real) и P(imag) указывает, что символ (-1-j) передается в поддиапазоне -26, символ (-1+j) передается в поддиапазоне -25 и т.д. Вторая строка P(real) и P(imag) указывает, что символ (1-j) передается в поддиапазоне 1, символ (-1-j) передается в поддиапазоне 2 и т.д. Для пилот-сигнала MIMO можно использовать и другие символы OFDM.
Согласно варианту осуществления четырем передающим антеннам присвоены последовательности Уолша W1=1111, W2=1010, W3=1100 и W4=1001 для пилот-сигнала MIMO. Для данной последовательности Уолша значение "1" указывает, что передается символ OFDM P, и значение "0" указывает, что передается символ OFDM -P (т.е. каждый из 52 символов модуляции в P инвертирован).
В Таблице 2 приведены символы OFDM, передаваемые с каждой из четырех передающих антенн, для передачи пилот-сигнала MIMO, которая занимает четыре периода символа, т.е. Nps=4.
Для более продолжительной передачи пилот-сигнала MIMO последовательность Уолша для каждой передающей антенны просто повторяется. Для этого множества последовательностей Уолша передача пилот-сигнала MIMO осуществляется в течение интервала времени, составляющего целое кратное четырех периодов символа, для обеспечения ортогональности между четырьмя передающими антеннами.
Приемник может выводить оценку канальной характеристики на основании принятого пилот-сигнала MIMO, осуществляя комплементарную обработку. В частности, для покрытия пилот-сигнала, передаваемого с передающей антенны i и принимаемого в приемной антенне j, пилот-сигнал, принимаемый в приемной антенне j, сначала обрабатывается с помощью последовательности Уолша, назначенной передающей антенне i, комплементарно покрытию Уолша, осуществляемому в передатчике. Затем символы OFDM со снятым покрытием для всех Nps периодов символа для пилот-сигнала MIMO, причем накопление осуществляется индивидуально для каждого из 52 поддиапазонов, используемых для передачи пилот-сигнала MIMO. Результат накопления обозначается  , для k=±1,…, 26, что является оценкой эффективной характеристики канала от передающей антенны i к приемной антенне j, включающей в себя характеристики передающей и приемной цепей, для 52 поддиапазонов данных и канала пилот-сигнала.
, для k=±1,…, 26, что является оценкой эффективной характеристики канала от передающей антенны i к приемной антенне j, включающей в себя характеристики передающей и приемной цепей, для 52 поддиапазонов данных и канала пилот-сигнала.
Такая же обработка может осуществляться для восстановления пилот-сигнала с каждой передающей антенны на каждой приемной антенне. Обработка пилот-сигнала обеспечивает Nap·Nut значений, которые являются элементами оценки эффективной канальной характеристики,  или
или  , для каждого из 52 поддиапазонов.
, для каждого из 52 поддиапазонов.
Согласно другому варианту осуществления для пилот-сигнала MIMO используется матрица Фурье F. Матрица Фурье может быть квадратной матрицей любого размера, например 3×3, 4×4, 5×5 и т.д. Элементы матриц Фурье N×N можно выразить в виде
 для n=1,…, N и m=1,…, N.
для n=1,…, N и m=1,…, N.
Каждой передающей антенне присвоен один столбец матрицы F . Элементы присвоенного столбца используются для умножения символов пилот-сигнала в разных интервалах времени, по аналогии с элементами последовательности Уолша. В общем случае, для умножения символов пилот-сигнала для пилот-сигнала MIMO можно использовать любую ортонормированную матрицу, элементы которой имеют единичный модуль.
Согласно еще одному варианту осуществления, применимому к системе MIMO-OFDM, поддиапазоны, доступные для передачи, делятся на NT непрерывающихся или непересекающихся подмножеств. Для каждой передающей антенны символы пилот-сигнала передаются в одном подмножестве поддиапазонов в каждом интервале времени. Каждая передающая антенна имеет цикл по NT подмножествам в NT интервалах времени, который соответствует длительности пилот-сигнала MIMO. Пилот-сигнал MIMO также может передаваться по-другому.
Независимо от режима передачи пилот-сигнала MIMO оценка канала может осуществляться как на точке доступа, так и на пользовательском терминале в ходе калибровки для получения эффективной оценки характеристики канала восходящей линии связи  и эффективной оценки характеристики канала нисходящей линии связи
и эффективной оценки характеристики канала нисходящей линии связи  соответственно, которые затем используются для вывода коэффициентов коррекции, как описано выше.
соответственно, которые затем используются для вывода коэффициентов коррекции, как описано выше.
3. Пространственная обработка
Корреляцию между характеристиками каналов нисходящей и восходящей линий связи можно использовать для упрощения оценки канала и пространственной обработки в точке доступа и на пользовательском терминале для системы MIMO с TDD и системы MIMO-OFDM с TDD. Это упрощение возможно после осуществления калибровки с учетом различий в передающих и приемных цепях. Как отмечено выше, характеристики калиброванных каналов таковы:
 для нисходящей линии связи и
для нисходящей линии связи и
Ур. (26a)
 для восходящей линии связи.
для восходящей линии связи.
Ур. (26b)
Аппроксимация последнего равенства в уравнении (26b) обусловлена использованием оценок фактических коэффициентов коррекции.
Матрицу канальной характеристики H (k) для каждого поддиапазона можно "диагонализировать" для получения NS собственных мод для этого поддиапазона. Собственные моды можно рассматривать как ортогональные пространственные каналы. Этой диагонализации можно добиться, осуществляя либо разложение по особым значениям матрицы канальной характеристики H (k), либо разложение по собственным значениям корреляционной матрицы для H (k), т.е. R (k)= Н H(k) Н (k).
Разложение по особым значениям матрицы характеристик калиброванных каналов восходящей линии связи, H cup(k), можно выразить в виде
 для k∈K,Ур. (27)
для k∈K,Ур. (27)
где U ap(k) - унитарная матрица Nut×Nut левых собственных векторов матрицы H cup(k);
Σ (k) - диагональная матрица Nut×Nap собственных значений матрицы H cup(k) и
V ut(k) - унитарная матрица Nap×Nap правых собственных векторов матрицы H cup(k).
Унитарная матрица M характеризуется свойством М H М = I . Соответственно разложение по особым значениям матрицы характеристик калиброванных каналов нисходящей линии связи, H cdn(k), можно выразить в виде
 для k∈K.
для k∈K.
 Ур. (28)
Ур. (28)
Таким образом, матрицы  и
и  также являются матрицами левых и правых собственных векторов соответственно матрицы
H
cdn(k), где "*" обозначает комплексное сопряжение. Матрицы
V
ut(k),
также являются матрицами левых и правых собственных векторов соответственно матрицы
H
cdn(k), где "*" обозначает комплексное сопряжение. Матрицы
V
ut(k),  ,
,  и
и  представляют собой разные формы матрицы
V
ut(k), и матрицы
U
ap(k),
представляют собой разные формы матрицы
V
ut(k), и матрицы
U
ap(k),  ,
,  и
и  также представляют собой разные формы матрицы
U
ap(k). Для простоты, говоря о матрицах
U
ap(k) и
V
ut(k) в нижеследующем описании, мы также будем подразумевать их различные формы. Матрицы
U
ap(k) и
V
ut(k) используются точкой доступа и пользовательским терминалом соответственно для пространственной обработки и обозначены как таковые своими нижними индексами.
также представляют собой разные формы матрицы
U
ap(k). Для простоты, говоря о матрицах
U
ap(k) и
V
ut(k) в нижеследующем описании, мы также будем подразумевать их различные формы. Матрицы
U
ap(k) и
V
ut(k) используются точкой доступа и пользовательским терминалом соответственно для пространственной обработки и обозначены как таковые своими нижними индексами.
Разложение по особым значениям более подробно описано в книге Гилберта Стрэнга (Gilbert Strang) под названием "Linear Algebra and Its Applications", Second Edition, Academic Press, 1980, которая включена сюда посредством ссылки.
Пользовательский терминал может оценить характеристику калиброванного канала нисходящей линии связи на основании пилот-сигнала MIMO, переданного точкой доступа. Затем пользовательский терминал может произвести разложение по особым значениям оценки характеристики калиброванного канала нисходящей линии связи  , для k∈K, для получения диагональных матриц
, для k∈K, для получения диагональных матриц  и матриц
и матриц  левых собственных векторов матрицы
левых собственных векторов матрицы  , для k∈K. Это разложение по особым значениям можно задать как
, для k∈K. Это разложение по особым значениям можно задать как  , где крышечка ("^") над каждой матрицей указывает, что это оценка фактической матрицы.
, где крышечка ("^") над каждой матрицей указывает, что это оценка фактической матрицы.
Аналогично, точка доступа может оценить характеристику калиброванного канала восходящей линии связи на основании пилот-сигнала MIMO, переданного пользовательским терминалом. Затем точка доступа может произвести разложение по особым значениям оценки характеристики калиброванного канала восходящей линии связи  для k∈K, для получения диагональных матриц
для k∈K, для получения диагональных матриц  и матриц
и матриц  левых собственных векторов матрицы
левых собственных векторов матрицы  , для k∈K. Это разложение по особым значениям можно задать как
, для k∈K. Это разложение по особым значениям можно задать как  .
.
Благодаря обратному каналу и калибровке разложение по особым значениям должно осуществляться либо на пользовательском терминале, либо на точке доступа, для получения обеих матриц  и
и  . Если оно осуществляется пользовательским терминалом, то матрицы
. Если оно осуществляется пользовательским терминалом, то матрицы  используются для пространственной обработки на пользовательском терминале и матрицы
используются для пространственной обработки на пользовательском терминале и матрицы  могут поступать обратно на точку доступа.
могут поступать обратно на точку доступа.
Точка доступа также может получать матрицы  и
и  на основании обратной ссылки, передаваемой пользовательским терминалом. Аналогично, пользовательский терминал также может получать матрицы
на основании обратной ссылки, передаваемой пользовательским терминалом. Аналогично, пользовательский терминал также может получать матрицы  и
и  на основании обратной ссылки, передаваемой точкой доступа. Обратная ссылка подробно описана в совместно присвоенной патентной заявке США № 10/693419 под названием "MIMO WLAN System", поданной 23 октября 2003 г.
на основании обратной ссылки, передаваемой точкой доступа. Обратная ссылка подробно описана в совместно присвоенной патентной заявке США № 10/693419 под названием "MIMO WLAN System", поданной 23 октября 2003 г.
Матрицы  и
и  можно использовать для передачи независимых потоков данных на Ns собственных модах канала MIMO, где NS≤min{Nap,Nut}. Пространственная обработка для передачи множественных потоков данных по нисходящей и восходящей линиям связи описана ниже.
можно использовать для передачи независимых потоков данных на Ns собственных модах канала MIMO, где NS≤min{Nap,Nut}. Пространственная обработка для передачи множественных потоков данных по нисходящей и восходящей линиям связи описана ниже.
A. Пространственная обработка на восходящей линии связи
Пространственную обработку, осуществляемую пользовательским терминалом для передачи по восходящей линии связи, можно выразить в виде
 для k∈K,
для k∈K, Ур. (29)
Ур. (29)
где x up(k) - вектор передачи для восходящей линии связи для поддиапазона k; и
s up(k) - вектор данных, имеющий до NS ненулевых элементов для символов модуляции, подлежащих передаче на NS собственных модах поддиапазона k.
Символы модуляции также можно подвергать дополнительной обработке до передачи. Например, можно применять инверсию канала по поддиапазонам данных (например, для каждой собственной моды), чтобы SNR приема было примерно одинаковым для всех поддиапазонов данных. Тогда пространственную обработку можно выразить в виде
 для k∈K,
Ур. (30)
для k∈K,
Ур. (30)
где W up(k) - матрица весовых коэффициентов для (необязательной) инверсии канала восходящей линии связи.
Инверсия канала также может осуществляться путем назначения передаваемой мощности каждому поддиапазону до осуществления модуляции, и в этом случае вектор s up(k) включает в себя коэффициенты инверсии канала, и матрицу W up(k) можно исключить из уравнения (30). В нижеследующем описании использование матрицы W up(k) в уравнении указывает, что коэффициенты инверсии канала не включены в вектор s up(k). Отсутствие матрицы W up(k) в уравнении может говорить о том, что либо (1) инверсия канала не осуществляется, либо (2) инверсия канала осуществляется и включена в вектор s up(k).
Инверсия канала может осуществляться в соответствии с описанием, приведенным в вышеупомянутой патентной заявке США № 10/693419 и в совместно присвоенной патентной заявке США № 10/229209 под названием "Coded MIMO Systems with Selective Channel Inversion Applied Per Eigenmode", поданной 27 августа 2002 г.
Принятую передачу по восходящей линии связи в точке доступа можно выразить в виде
 для k∈K,Ур. (31)
для k∈K,Ур. (31)
где r up(k) - вектор приема для восходящей линии связи для поддиапазона k;
n (k) - аддитивный белый гауссов шум (AWGN) для поддиапазона k и
x up(k) - то же самое, что в уравнении (29).
Пространственную обработку на приемнике (или согласованную пространственную фильтрацию) в точке доступа для принятой передачи по восходящей линии связи можно выразить в виде

для k∈K,  Ур. (32)
Ур. (32)
где  - это оценка вектора данных
s
up(k), переданного пользовательским терминалом по восходящей линии связи, и
- это оценка вектора данных
s
up(k), переданного пользовательским терминалом по восходящей линии связи, и  - это шум после обработки. Уравнение (32) предполагает, что инверсия канала не осуществлялась на пользовательском терминале, вектор передачи
x
up(k) - то же самое, что в уравнении (29), и вектор приема
r
up(k) - то же самое, что в уравнении (31).
- это шум после обработки. Уравнение (32) предполагает, что инверсия канала не осуществлялась на пользовательском терминале, вектор передачи
x
up(k) - то же самое, что в уравнении (29), и вектор приема
r
up(k) - то же самое, что в уравнении (31).
B. Пространственная обработка на нисходящей линии связи
Пространственную обработку в точке доступа для передачи на нисходящей линии связи можно выразить в виде
 для k∈K,Ур. (33)
для k∈K,Ур. (33)
где x dn(k) - вектор передачи и s dn(k) - вектор данных для нисходящей линии связи.
Опять же, дополнительная обработка (например, инверсия канала) также может осуществляться на символах модуляции до передачи. Тогда пространственную обработку можно выразить в виде
 для k∈K,Ур. (34)
для k∈K,Ур. (34)
где W dn(k) - матрица весовых коэффициентов для (необязательной) инверсии канала нисходящей линии связи. Передачу по нисходящей линии связи, принятую на пользовательском терминале, можно выразить в виде
 для k∈K.Ур. (35)
для k∈K.Ур. (35)
Пространственную обработку на приемнике (или согласованную пространственную фильтрацию) на пользовательском терминале для принятой передаче на нисходящей линии связи можно выразить в виде

для k∈K
Ур. (36)
Уравнение (36) предполагает, что инверсия канала не осуществлялась в точке доступа, вектор передачи x dn(k) - то же самое, что в уравнении (33), и вектор приема r dn(k) - то же самое, что в уравнении (35).
В Таблице 3 приведены сведенья по пространственной обработке в точке доступа и на пользовательском терминале для передачи и приема данных. Таблица 3 составлена исходя из того, что на передатчике осуществляется дополнительная обработка посредством W (k). Однако если эта дополнительная обработка не осуществляется, то W (k) просто равна единичной матрице.




Согласно вышеприведенному описанию и Таблице 3, матрицы коррекции  и
и  используются для передающей стороны и приемной стороны соответственно в точке доступа. Одну из этих двух матриц коррекции можно положить равной единичной матрице. Матрицы коррекции
используются для передающей стороны и приемной стороны соответственно в точке доступа. Одну из этих двух матриц коррекции можно положить равной единичной матрице. Матрицы коррекции  и
и  используются для передающей стороны и приемной стороны соответственно на пользовательском терминале. Одну из этих двух матриц коррекции можно положить равной единичной матрице. Матрицы коррекции
используются для передающей стороны и приемной стороны соответственно на пользовательском терминале. Одну из этих двух матриц коррекции можно положить равной единичной матрице. Матрицы коррекции  и
и  можно объединять с весовыми матрицами
W
dn(k) и
W
up(k) для получения матриц коэффициентов усиления
G
dn(k) и
G
up(k), где
можно объединять с весовыми матрицами
W
dn(k) и
W
up(k) для получения матриц коэффициентов усиления
G
dn(k) и
G
up(k), где  и
и  .
.
C. Передача данных по одной линии связи
Передачу данных по данной линии связи также можно обеспечить, применяя матрицы коррекции на передающей станции и используя приемник MMSE на приемной станции. Например, передачу данных по нисходящей линии связи можно обеспечить, применяя коэффициенты коррекции только на передающей стороне в точке доступа и используя приемник MMSE на пользовательском терминале. Для простоты опишем один поддиапазон и исключим индекс k поддиапазона из уравнений. Характеристики калиброванных каналов нисходящей и восходящей линии связи можно выразить как
 , и
, и Ур. (37)
Ур. (37)
 Ур. (38)
Ур. (38)
Пользовательский терминал передает пилот-сигнал по восходящей линии связи, который используется точкой доступа для вывода оценки характеристики канала восходящей линии связи. Точка доступа осуществляет разложение по особым значениям оценки характеристики канала восходящей линии связи  , как показано в уравнении (27), и выводит матрицу
, как показано в уравнении (27), и выводит матрицу  . Затем точка доступа использует
. Затем точка доступа использует  для пространственной обработки передаваемых данных на собственных модах канала MIMO, как показано в уравнении (33).
для пространственной обработки передаваемых данных на собственных модах канала MIMO, как показано в уравнении (33).
Передачу по нисходящей линии связи, принятую на пользовательском терминале, можно выразить в виде
 Ур. (39)
Ур. (39)
Уравнение (39) указывает, что коэффициенты коррекции на пользовательском терминале не применяются. Пользовательский терминал выводит матрицу пространственного фильтра MMSE M , следующим образом:

 Ур. (40)
Ур. (40)
где
 и
и
φ nn - матрица автокорреляции для шума.
Если шум является AWGN, то  , где
, где  - дисперсия шума. Пользовательский терминал может выводить
H
edn на основании пилот-сигнала, передаваемого совместно с данными точкой доступа.
- дисперсия шума. Пользовательский терминал может выводить
H
edn на основании пилот-сигнала, передаваемого совместно с данными точкой доступа.
Затем пользовательский терминал осуществляет пространственную обработку MMSE следующим образом:
 Ур. (41)
Ур. (41)
где
n
mmse включает в себя фильтрованный шум MMSE и остаточные перекрестные помехи и  - это оценка вектора данных
s
dn. Символьные оценки из матрицы пространственного фильтра MMSE
M
являются ненормированными оценками символов данных. Пользовательский терминал может перемножать
- это оценка вектора данных
s
dn. Символьные оценки из матрицы пространственного фильтра MMSE
M
являются ненормированными оценками символов данных. Пользовательский терминал может перемножать  с матрицей масштабирования
D
, которая выражается как
D
=[diag[
MH
edn]]-1, для получения нормированных оценок символов данных.
с матрицей масштабирования
D
, которая выражается как
D
=[diag[
MH
edn]]-1, для получения нормированных оценок символов данных.
Если пользовательский терминал применяет матрицу коррекции  на своей приемной стороне, то общая характеристика канала нисходящей линии связи будет
H
odn=
K
rut
H
edn. Матрицу пространственного фильтра MMSE
на своей приемной стороне, то общая характеристика канала нисходящей линии связи будет
H
odn=
K
rut
H
edn. Матрицу пространственного фильтра MMSE  , в случае применения матрицы коррекции
K
rut на приемной стороне на пользовательском терминале, можно выразить в виде
, в случае применения матрицы коррекции
K
rut на приемной стороне на пользовательском терминале, можно выразить в виде
 Ур. (42)
Ур. (42)
Обратную величину в уравнении (42) можно преобразовать следующим образом:
 Ур. (43)
Ур. (43)
Подставляя уравнение (43) в уравнение (42), получаем
 Ур. (44)
Ур. (44)
Передачу по нисходящей линии связи, принятую на пользовательском терминале, в случае применения матрицы коррекции K rut на приемной стороне на пользовательском терминале можно выразить в виде
 Ур. (45)
Ур. (45)
Затем пользовательский терминал осуществляет пространственную обработку MMSE следующим образом:
 Ур. (46)
Ур. (46)
Уравнения (45) и (46) указывают, что с помощью приемника MMSE пользовательский терминал может обеспечивать одну и ту же производительность независимо от того, применяются ли на пользовательском терминале коэффициенты коррекции. Обработка MMSE опосредованной учитывает любое рассогласование между передающей и приемной цепями на пользовательском терминале. Согласованный пространственный фильтр MMSE выводится с помощью H edn, если коэффициенты коррекции не применяются на приемной стороне на пользовательском терминале, и с помощью H odn, если коэффициенты коррекции применяются.
Аналогично, передачу данных по восходящей линии связи можно обеспечить, применяя матрицы коррекции на передающей стороне и/или приемной стороне на пользовательском терминале и с использованием приемника MMSE в точке доступа.
4. Система MIMO-OFDM
На фиг.5 показана блок-схема варианта осуществления точки доступа 502 и пользовательского терминала 504 в системе MIMO-OFDM с TDD. Для простоты, в нижеследующем описании предполагается, что точка доступа и пользовательский терминал снабжены четырьмя антеннами, которые можно использовать для передачи и приема данных.
На нисходящей линии связи, в точке доступа 502, процессор 510 передачи данных (TX) принимает данные трафика (т.е. биты информации) от источника данных 508 и сигнализацию и другую информацию от контроллера 530. Процессор 510 передачи данных форматирует, кодирует, перемежает и модулирует (т.е. осуществляет отображение символов) принятые данные и генерирует поток символов модуляции для каждого пространственного канала, используемого для передачи данных. Пространственный процессор TX 520 принимает потоки символов модуляции от процессора передачи данных 510 и осуществляет пространственную обработку для обеспечения четырех потоков передаваемых символов, по одному потоку для каждой антенны. Пространственный процессор TX 520 также, при необходимости, мультиплексирует символы пилот-сигнала (например, для калибровки).
Каждый модулятор (МОД) 522 принимает и обрабатывает соответствующий передаваемый поток символов для генерации соответствующего потока символов OFDM. Каждый поток символов OFDM дополнительно обрабатывается передающей цепью в модуляторе 522 для генерации соответствующего модулированного сигнала нисходящей линии связи. Затем четыре модулированных сигнала нисходящей линии связи от модуляторов 522a-522d передаются с четырех антенн 524a-524d соответственно.
На пользовательском терминале 504 антенны 552 принимают переданные модулированные сигналы нисходящей линии связи, и каждая антенна выдает принятый сигнал на соответствующий демодулятор (ДЕМОД) 554. Каждый демодулятор 554 (который включает в себя приемную цепь) осуществляет обработку, комплементарную той, которая осуществляется на модуляторе 522, и выдает принятые символы. Пространственный процессор 560 приема (RX) осуществляет пространственную обработку принятых символов от всех демодуляторов 554 и выдает восстановленные символы, которые являются оценками символов модуляции, переданных точкой доступа. Процессор 570 приема данных обрабатывает (например, снимает отображение символов, снимает перемежение и декодирует) восстановленные символы и выдает декодированные данные. Декодированные данные может включать в себя восстановленные данные трафика, сигнализацию и т.д., которые поступают на приемник 572 данных для хранения и/или на контроллер 580 для дальнейшей обработки.
Контроллеры 530 и 580 управляют работой различных модулей обработки в точке доступа и на пользовательском терминале соответственно. Запоминающие устройства 532 и 582 хранят данные и программные коды, используемые контроллерами 530 и 580 соответственно.
В ходе калибровки пространственный процессор RX 560 обеспечивает оценку характеристики канала нисходящей линии связи,  , которая выводится на основании пилот-сигнала MIMO, передаваемого точкой доступа. Процессор 570 приема данных обеспечивает оценку характеристики канала восходящей линии связи,
, которая выводится на основании пилот-сигнала MIMO, передаваемого точкой доступа. Процессор 570 приема данных обеспечивает оценку характеристики канала восходящей линии связи,  , которая выводится точкой доступа и передается по нисходящей линии связи. Контроллер 580 принимает оценки канальных характеристик
, которая выводится точкой доступа и передается по нисходящей линии связи. Контроллер 580 принимает оценки канальных характеристик  и
и  , выводит матрицы коррекции
, выводит матрицы коррекции  и
и  и выдает матрицы
и выдает матрицы  на процессор 590 передачи данных для передачи обратно на точку доступа. Контроллер 580 дополнительно выводит матрицы коррекции
на процессор 590 передачи данных для передачи обратно на точку доступа. Контроллер 580 дополнительно выводит матрицы коррекции  и
и  на основании матриц коррекции
на основании матриц коррекции  , где
, где  или
или  может быть единичной матрицей, выдает матрицы коррекции
может быть единичной матрицей, выдает матрицы коррекции  на пространственный процессор TX 592 и выдает матрицы коррекции
на пространственный процессор TX 592 и выдает матрицы коррекции  на пространственный процессор RX 560.
на пространственный процессор RX 560.
Обработка для восходящей линии связи может быть идентичной или отличной от обработки для нисходящей линии связи. Данные и сигнализация обрабатываются (например, кодируются, перемежаются и модулируются) процессором 590 передачи данных и подвергаются дополнительной пространственной обработке пространственным процессором TX 592, который также мультиплексирует символы пилот-сигнала. Символы пилот-сигнала и символы модуляции дополнительно обрабатываются модуляторами 554 для генерации модулированных сигналов восходящей линии связи, которые затем передаются через антенны 552 в точку доступа.
В точке доступа 110 модулированные сигналы восходящей линии связи принимаются антеннами 524, демодулируются демодуляторами 522 и обрабатываются пространственным процессором RX 540 и процессором 542 приема данных в режиме, комплементарном обработке, осуществляемой на пользовательском терминале. В ходе калибровки пространственный процессор RX 560 обеспечивает оценку канала восходящей линии связи,  , которая выводится на основании пилот-сигнала MIMO, передаваемого пользовательским терминалом. Матрицы
, которая выводится на основании пилот-сигнала MIMO, передаваемого пользовательским терминалом. Матрицы  принимаются контроллером 530 и поступают на процессор 510 передачи данных для передачи на пользовательский терминал.
принимаются контроллером 530 и поступают на процессор 510 передачи данных для передачи на пользовательский терминал.
На фиг.6 показана блок-схема пространственного процессора TX 520a, который можно использовать в качестве пространственных процессоров TX 520 и 592 на фиг.5. Для простоты, в нижеследующем описании предполагается, что все четыре собственные моды выбраны для использования.
В процессоре 520a демультиплексор 632 принимает четыре потока символов модуляции (которые обозначены как s 1(n)-s 4(n)), подлежащие передаче на четырех собственных модах, демультиплексирует каждый поток на ND подпотока для ND поддиапазонов данных и выдает четыре подпотока символов модуляции для каждого поддиапазона данных на пространственный процессор 640 TX соответствующего поддиапазона. Каждый процессор 640 осуществляет обработку, например, показанную в уравнении (29), (30), (33) или (34) для одного поддиапазона.
В каждом пространственном процессоре 640 TX поддиапазона четыре подпотока символов модуляции (которые обозначены как s
1(k)-s
4(k)) поступают на четыре формирователя 650a-650d пучка для четырех собственных мод соответствующего поддиапазона. Каждый формирователь 650 пучка осуществляет формирование пучка для передачи одного подпотока символов на одной собственной моде одного поддиапазона. Каждый формирователь 650 пучка принимает один подпоток символов s
m(k) и осуществляет формирование пучка с использованием собственного вектора v
m(k) для соответствующей собственной моды. В каждом формирователе 650 пучка символы модуляции поступают на четыре умножителя 652a-652d, которые также принимают четыре элемента, v
m,1(k), v
m,2(k), vm,3(k) и vm,4(k), собственного вектора
v
m(k) для соответствующей собственной моды. Собственный вектор
v
m(k) является m-м столбцом матрицы  для нисходящей линии связи и является m-м столбцом матрицы
для нисходящей линии связи и является m-м столбцом матрицы  для восходящей линии связи. Каждый умножитель 652 перемножает масштабированные символы модуляции со значением их собственного вектора v
m,j(k) и обеспечивает символы, "прошедшие формирование пучка". Умножители 652a-652d выдают четыре подпотока символов, прошедших формирование пучка (подлежащие передаче с четырех антенн), на сумматоры 660a-660d соответственно.
для восходящей линии связи. Каждый умножитель 652 перемножает масштабированные символы модуляции со значением их собственного вектора v
m,j(k) и обеспечивает символы, "прошедшие формирование пучка". Умножители 652a-652d выдают четыре подпотока символов, прошедших формирование пучка (подлежащие передаче с четырех антенн), на сумматоры 660a-660d соответственно.
Каждый сумматор 660 принимает и суммирует четыре символа, прошедших формирование пучка, для четырех собственных мод для каждого периода символа и обеспечивает предварительно обработанный символ соответствующей передающей антенны. Сумматоры 660a-660d выдает четыре подпотока предварительно обработанных символов для четырех передающих антенн на буферы/мультиплексоры 670a-670d соответственно. Каждый буфер/мультиплексор 670 принимает символы пилот-сигнала и предварительно обработанные символы от пространственных процессоров 640 поддиапазона TX для ND поддиапазонов данных. Затем каждый буфер/мультиплексор 670 мультиплексирует символы пилот-сигнала, предварительно обработанные символы и нулевые символы для поддиапазонов канала пилот-сигнала, поддиапазонов данных и неиспользуемых поддиапазонов соответственно для формирования последовательности из NF символов для этого периода символа. В ходе калибровки символы пилот-сигнала передаются в назначенных поддиапазонах. Умножители 668a-668d покрывают символы пилот-сигнала для четырех антенн последовательностями Уолша W1-W4 соответственно, назначенными четырем антеннам, как описано выше и показано в Таблице 2. Каждый буфер/мультиплексор 670 выдает поток символов на соответствующий умножитель 672.
Умножители 672a-672d также принимают коэффициенты коррекции K
1(k), K
2(k), K
3(k) и K
4(k) соответственно. Коэффициенты коррекции для каждого поддиапазона данных k являются диагональными элементами матрицы  для нисходящей линии связи и диагональными элементами матрицы
для нисходящей линии связи и диагональными элементами матрицы  для восходящей линии связи. Каждый умножитель 672 масштабирует свои входные символы своими коэффициентами коррекции K
m(k) и обеспечивает передаваемые символы. Умножители 672a-672d обеспечивают четыре передаваемых потоков символов для четырех передающих антенн.
для восходящей линии связи. Каждый умножитель 672 масштабирует свои входные символы своими коэффициентами коррекции K
m(k) и обеспечивает передаваемые символы. Умножители 672a-672d обеспечивают четыре передаваемых потоков символов для четырех передающих антенн.
Пространственная обработка и модуляция OFDM более подробно описаны в вышеупомянутой патентной заявке США № 10/693419.
Описанные здесь методы калибровки можно реализовать по-разному. Например, эти методы можно реализовать аппаратными средствами, программными средствами или в виде их комбинации. Для аппаратной реализации методы калибровки могут быть реализованы в точке доступа и на пользовательском терминале в виде одной или нескольких специализированных интегральных схем (СИС), цифровых сигнальных процессоров (ЦСП), устройства обработки цифровых сигналов (DSPD), программируемых логических устройств (ПЛУ), вентильных матриц, программируемых пользователем (FPGA), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других электронных модулей, предназначенных для осуществления описанных здесь функций, или их комбинации.
Для программной реализации методы калибровки могут быть реализованы в виде модулей (например, процедур, функций и пр.), которые осуществляют описанные здесь функции. Программные коды могут храниться запоминающем устройстве (например, запоминающих устройствах 532 и 582, показанных на фиг.5) и выполняться процессором (например, контроллерами 530 и 580, по мере необходимости). Запоминающее устройство можно реализовать внутри процессора или вне процессора, в этом случае он может быть подключен к процессору с возможностью передачи данных различными средствами, известными в данной области техники.
Подзаголовки включены сюда для ссылки и для облегчения навигации по разделам. Эти подзаголовки не призваны ограничивать объем изложенных в них принципов, и эти принципы можно применять в других разделах на протяжении описания изобретения.
Вышеприведенное описание вариантов осуществления призвано дать возможность любому специалисту в данной области техники делать или использовать настоящее изобретение. Специалисты в данной области техники могут предложить различные модификации этих вариантов осуществления, и сформулированные здесь общие принципы можно применять к другим вариантам осуществления, не выходя за рамки сущности или объема изобретения. Таким образом, настоящее изобретение не подлежит ограничению представленными здесь вариантами осуществления, но отвечает широчайшему объему, согласующемуся с раскрытыми здесь принципами и новыми признаками.
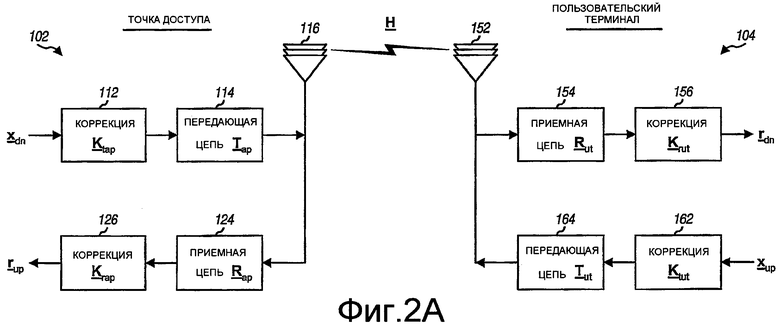
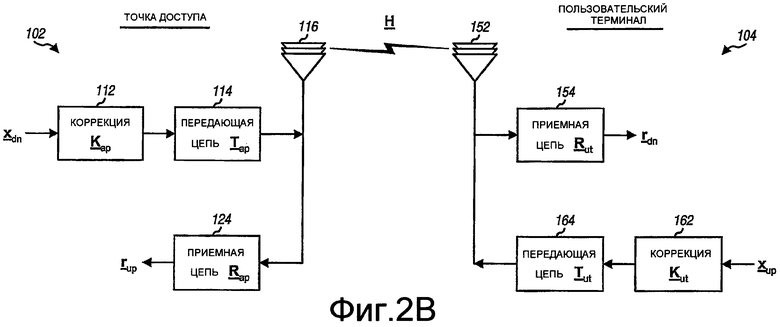



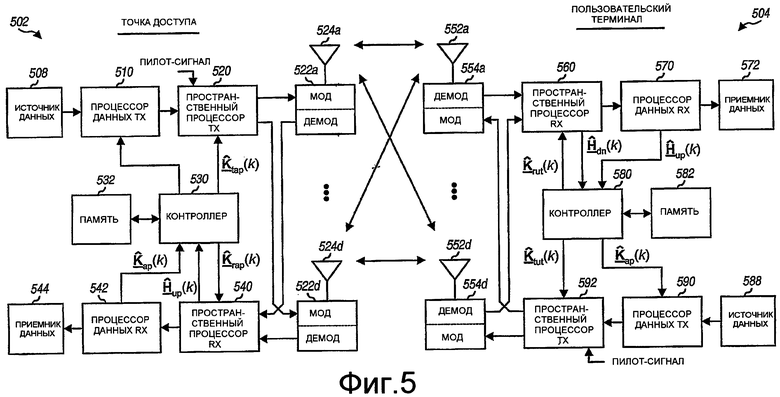
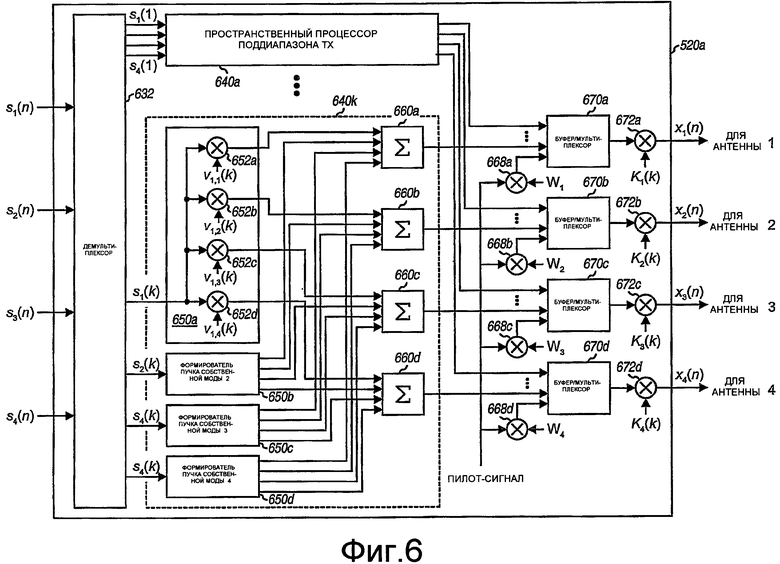
Изобретение относится к области связи и может быть использовано для калибровки характеристик каналов нисходящей и восходящей линий связи в системе с временным разделением каналов. В способе калибровки пилот-сигналы передают по каналам нисходящей линии связи и восходящей линии связи и используют их для вывода оценок характеристик каналов нисходящей и восходящей линий связи соответственно. Коэффициенты коррекции для точки доступа и коэффициенты коррекции для пользовательского терминала определяют на основании (например, путем осуществления вычисления отношения матриц или вычисления минимальной среднеквадратической ошибки (MMSE)) оценок характеристик каналов нисходящей линии связи и восходящей линии связи. Коэффициенты коррекции для точки доступа и коэффициенты коррекции для пользовательского терминала используются для получения калиброванного канала нисходящей линии связи и калиброванного канала восходящей линии связи, которые транспонированы относительно друг друга. Калибровка может быть осуществлена в реальном времени на основании радиопередачи. Технический результат - повышение производительности путем учета различий в частотных характеристиках нисходящей и восходящей линий связи. 4 н. и 28 з.п. ф-лы, 8 ил., 3 табл.
1. Способ калибровки линий связи в системе беспроводной дуплексной связи с временным разделением каналов (TDD), содержащий этапы, на которых
получают оценку канальной характеристики для канала нисходящей линии связи от точки доступа к пользовательскому терминалу,
получают оценку канальной характеристики для канала восходящей линии связи от пользовательского терминала к точке доступа и
определяют коэффициенты коррекции для точки доступа и коэффициенты коррекции для пользовательского терминала на основании оценок канальных характеристик для каналов нисходящей и восходящей линий связи, причем коэффициенты коррекции для точки доступа и коэффициенты коррекции для пользовательского терминала используют для получения характеристики калиброванного канала нисходящей линии связи и характеристики калиброванного канала восходящей линии связи, и
применяют по меньшей мере один из коэффициентов коррекции для точки доступа на по меньшей мере приемной стороне в точке доступа или коэффициентов коррекции для пользовательского термина на по меньшей мере приемной стороне в пользовательском терминале.
2. Способ по п.1, дополнительно содержащий этап, на котором
применяют коэффициенты для точки доступа на передающей стороне или на обеих, передающей и приемной сторонах в точке доступа.
3. Способ по п.1, дополнительно содержащий этап, на котором применяют коэффициенты коррекции для пользовательского терминала на передающей стороне или на обеих, передающей и приемной сторонах в пользовательском терминале.
4. Способ по п.1, в котором на этапе определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала
определяют коэффициенты коррекции для точки доступа и коэффициенты коррекции для пользовательского терминала на основании следующего уравнения:

где  - матрица оценки канальной характеристики для канала нисходящей линии связи,
- матрица оценки канальной характеристики для канала нисходящей линии связи,
 - матрица оценки канальной характеристики для канала восходящей линии связи,
- матрица оценки канальной характеристики для канала восходящей линии связи,
 - матрица коэффициентов коррекции для точки доступа,
- матрица коэффициентов коррекции для точки доступа,
 - матрица коэффициентов коррекции для пользовательского терминала и
- матрица коэффициентов коррекции для пользовательского терминала и
"T" обозначает транспонирование.
5. Способ по п.4, дополнительно содержащий этап, на котором
выводят коэффициенты коррекции для передающей стороны точки доступа и коэффициенты коррекции для приемной стороны точки доступа на основании следующего уравнения:
где  - матрица коэффициентов коррекции для передающей стороны точки доступа и
- матрица коэффициентов коррекции для передающей стороны точки доступа и
 - матрица коэффициентов коррекции для приемной стороны точки доступа.
- матрица коэффициентов коррекции для приемной стороны точки доступа.
6. Способ по п.5, дополнительно содержащий этап, на котором задают матрицу  или матрицу
или матрицу  равной единичной матрице.
равной единичной матрице.
7. Способ по п.5, дополнительно содержащий этап, на котором задают матрицу или матрицу равной произвольной матрице.
8. Способ по п.4, дополнительно содержащий этап, на котором
выводят коэффициенты коррекции для передающей стороны пользовательского терминала и коэффициенты коррекции для приемной стороны пользовательского терминала на основании следующего уравнения:
где  - матрица коэффициентов коррекции для передающей стороны пользовательского терминала и
- матрица коэффициентов коррекции для передающей стороны пользовательского терминала и
 - матрица коэффициентов коррекции для приемной стороны пользовательского терминала.
- матрица коэффициентов коррекции для приемной стороны пользовательского терминала.
9. Способ по п.4, в котором на этапе определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала
вычисляют матрицу  как поэлементное отношение матрицы
как поэлементное отношение матрицы  к матрице
к матрице  и
и
выводят матрицы  и
и  на основании матрицы .
на основании матрицы .
10. Способ по п.9, в котором на этапе вывода матрицы
нормируют каждую из совокупности строк матрицы ,
определяют среднее совокупности нормированных строк матрицы и
формируют матрицу на основании среднего совокупности нормированных строк.
11. Способ по п.9, в котором на этапе вывода матрицы
нормируют каждый из совокупности столбцов матрицы ,
определяют среднее обратных величин совокупности нормированных столбцов матрицы и
формируют матрицу на основании среднего обратных величин совокупности нормированных столбцов.
12. Способ по п.4, дополнительно содержащий этап, на котором
выводят матрицы и на основании вычисления минимальной среднеквадратической ошибки (MMSE).
13. Способ по п.4, дополнительно содержащий этап, на котором
выводят матрицы и на основании вычисления минимальной среднеквадратической ошибки (MMSE) для минимизации среднеквадратической ошибки (MSE), заданной следующим уравнением:

14. Способ по п.1, в котором на этапе определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала
выводят первое множество матриц коэффициентов коррекции для точки доступа для первого множества частотных поддиапазонов и
интерполируют первое множество матриц для получения второго множества матриц коэффициентов коррекции для точки доступа для второго множества частотных поддиапазонов.
15. Способ по п.1, в котором на этапе определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала
выводят первое множество матриц коэффициентов коррекции для пользовательского терминала для первого множества частотных поддиапазонов и
интерполируют первое множество матриц для получения второго множества матриц коэффициентов коррекции для пользовательского терминала для второго множества частотных поддиапазонов.
16. Способ по п.1, дополнительно содержащий этапы, на которых
передают пилот-сигнал по каналу восходящей линии связи, причем оценку характеристики канала восходящей линии связи выводят на основании пилот-сигнала, передаваемого по каналу восходящей линии связи, и
принимают пилот-сигнал по каналу нисходящей линии связи, причем оценку характеристики канала нисходящей линии связи выводят на основании пилот-сигнала, принимаемого по каналу нисходящей линии связи.
17. Устройство в системе беспроводной дуплексной связи с временным разделением каналов (TDD), содержащее
средство получения оценки канальной характеристики для канала нисходящей линии связи от точки доступа к пользовательскому терминалу,
средство получения оценки канальной характеристики для канала восходящей линии связи от пользовательского терминала к точке доступа и
средство определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала на основании оценок канальных характеристик для каналов нисходящей и восходящей линий связи, причем коэффициенты коррекции для точки доступа и коэффициенты коррекции для пользовательского терминала используются для получения характеристики калиброванного канала нисходящей линии связи и характеристики калиброванного канала восходящей линии связи; и
средство применения по меньшей мере одного из коэффициентов коррекции для точки доступа на по меньшей мере приемной стороне в точке доступа или коэффициентов коррекции для пользовательского термина на по меньшей мере приемной стороне в пользовательском терминале.
18. Устройство по п.17, дополнительно содержащее
средство применения коэффициентов коррекции для точки доступа на передающей стороне или на обеих, передающей и приемной сторонах в точке доступа.
19. Устройство по п.17, дополнительно содержащее
средство вывода коэффициентов коррекции для передающей стороны точки доступа и коэффициентов коррекции для приемной стороны точки доступа на основании коэффициентов коррекции для точки доступа.
20. Устройство по п.17, дополнительно содержащее
средство применения коэффициентов коррекции для пользовательского терминала на передающей стороне или на обеих, передающей и приемной сторонах в пользовательском терминале.
21. Устройство по п.17, дополнительно содержащее
средство вывода коэффициентов коррекции для передающей стороны пользовательского терминала и коэффициентов коррекции для приемной стороны пользовательского терминала на основании коэффициентов коррекции для пользовательского терминала.
22. Устройство по п.17, в котором средство определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала содержит
средство осуществления вычисления минимальной среднеквадратической ошибки (MMSE) для оценок канальных характеристик для каналов нисходящей и восходящей линий связи для определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала.
23. Устройство по п.17, в котором средство определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала содержит
средство осуществления вычисления отношения матриц для оценок канальных характеристик для каналов нисходящей и восходящей линий связи для определения коэффициентов коррекции для точки доступа и коэффициентов коррекции для пользовательского терминала.
24. Способ калибровки линий связи в системе беспроводной дуплексной связи с временным разделением каналов (TDD) с множественными входами и множественными выходами (MIMO), содержащий этапы, на которых
передают пилот-сигнал по первой линии связи с первой станции на вторую станцию,
получают оценку канальной характеристики для первой линии связи, выведенную на основании пилота-сигнала, передаваемого по первой линии связи,
принимают пилот-сигнал по второй линии связи от второй станции, выводят оценку канальной характеристики для второй линии связи на основании пилота-сигнала, принимаемого по второй линии связи, и
определяют коэффициенты коррекции для первой станции и коэффициенты коррекции для второй станции на основании оценок канальных характеристик для первой и второй линий связи, причем коэффициенты коррекции для первой станции и коэффициенты коррекции для второй станции используют для получения характеристики калиброванного канала для первой линии связи и характеристики калиброванного канала для второй линии связи, и
применяют по меньшей мере один из коэффициентов коррекции для первой станции на по меньшей мере приемной стороне на первой станции или коэффициентов коррекции для второй станции на по меньшей мере приемной стороне на второй станции.
25. Способ по п.24, дополнительно содержащий этап, на котором применяют коэффициенты коррекции для первой станции на передающей стороне или на обеих, передающей и приемной сторонах на первой станции.
26. Способ по п.24, дополнительно содержащий этап, на котором отправляют коэффициенты коррекции для второй станции на вторую станцию.
27. Способ по п.24, дополнительно содержащий этап, на котором обновляют коэффициенты коррекции для первой станции на основании калибровки с помощью совокупности вторых станций.
28. Устройство в системе беспроводной дуплексной связи с временным разделением каналов (TDD), содержащее
пространственный процессор передачи для передачи первого пилот-сигнала по первой линии связи с первой станции на вторую станцию,
пространственный процессор приема для приема второго пилот-сигнала по второй линии связи со второй станции для вывода оценки канальной характеристики для второй линии связи на основании принятого второго пилот-сигнала и для приема оценки канальной характеристики для первой линии связи, выведенной на основании переданного первого пилот-сигнала, и
контроллер для определения коэффициентов коррекции для первой станции и коэффициентов коррекции для второй станции на основании оценок канальных характеристик для первой и второй линий связи, причем коэффициенты коррекции для первой станции и коэффициенты коррекции для второй станции используются для получения характеристики калиброванного канала для первой линии связи и характеристики калиброванного канала для второй линии связи, и
причем контроллер выполнен с возможностью применения по меньшей мере одного из коэффициентов коррекции для первой станции на по меньшей мере приемной стороне на первой станции или коэффициентов коррекции для второй станции на по меньшей мере приемной стороне на второй станции.
29. Устройство по п.28, в котором контроллер осуществляет вычисление минимальной среднеквадратической ошибки (MMSE) для оценок канальных характеристик для первой и второй линий связи для определения коэффициентов коррекции для первой станции и коэффициентов коррекции для второй станции.
30. Устройство по п.28, в котором контроллер осуществляет вычисление отношения матриц для оценок канальных характеристик для первой и второй линий связи для определения коэффициентов коррекции для первой станции и коэффициентов коррекции для второй станции.
31. Устройство по п.28, в котором контроллер выводит коэффициенты коррекции для пространственного процессора передачи и коэффициенты коррекции для пространственного процессора приема на основании коэффициентов коррекции для первой станции.
32. Устройство по п.28, в котором контроллер обновляет коэффициенты коррекции для первой станции на основании калибровки с помощью совокупности вторых станций.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 6615024 В2, 02.09.2003 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВЗВЕШИВАНИЯ СИГНАЛОВ НА ТРАКТЕ РАДИОПЕРЕДАЧИ (ВАРИАНТЫ) | 1997 |
|
RU2141168C1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |

