Заявление приоритета по § 119 Главы 35 Свода законов США
Данная заявка испрашивает приоритет предварительной заявки США № 60/421.309, озаглавленной "Система БЛВС с множеством входов и множеством выходов", поданной 25 октября 2002.
Область техники
Настоящее изобретение относится, в общем, к передаче данных, более конкретно, к системе связи беспроводной локальной вычислительной сети (БЛВС) (WLAN) со множеством входов и множеством выходов (МВхМВых) (MIMO).
Уровень техники
Системы беспроводной связи широко распространены для обеспечения различных типов передач, таких как передача речи, пакетных данных и т.д. Эти системы могут быть системами множественного доступа, способными поддерживать связь со множеством пользователей последовательно или одновременно путем совместного использования доступных системных ресурсов. Примеры систем множественного доступа включают в себя системы множественного доступа с кодовым разделением каналов (МДКР) (CDMA), системы множественного доступа с временным разделением каналов (МДВР) (ТDMA) и системы множественного доступа с частотным разделением каналов (МДЧР) (FDMA).
Беспроводные локальные вычислительные сети (БЛВС) (WLAN) также широко распространены для обеспечения связи между беспроводными электронными приборами (например, компьютерами) по беспроводной линии. БЛВС может использовать пункты доступа (или базовые станции), которые действуют как концентраторы и обеспечивают возможность соединения для беспроводных приборов. Пункты доступа могут также связывать (или сопрягать) БЛВС с проводными ЛВС, тем самым, предоставляя беспроводным приборам доступ к ресурсам ЛВС.
В системе беспроводной связи модулированный высокочастотный (ВЧ) сигнал от передающего блока может поступать в приемный блок по нескольким трассам распространения. Характеристики этих трасс распространения обычно изменяются во времени вследствие таких факторов, как замирания и многолучевое распространение. Чтобы обеспечить разнесенный режим для противодействия вредным эффектам на трассе распространения и улучшить производительность, можно использовать множество передающих и приемных антенн. Если трассы распространения между передающими и приемными антеннами линейно независимы (т.е. передача по одной трассе не формируется как линейная комбинация передач по другим трассам), что, в общем случае, справедливо по меньшей мере до некоторой степени, то вероятность точного приема передач данных возрастает по мере увеличения числа антенн. Обычно разнесение увеличивается и производительность улучшается по мере того, как увеличивается число передающих и приемных антенн.
Системы с множеством входов и множеством выходов (МВхМВых) используют для передачи данных множество ( ) передающих антенн и множество (
) передающих антенн и множество ( ) приемных антенн. Канал МВхМВых, образованный передающими антеннами и приемными антеннами, может быть разложен на
) приемных антенн. Канал МВхМВых, образованный передающими антеннами и приемными антеннами, может быть разложен на  пространственных каналов, при ≤ {min , }. Каждый из пространственных каналов соответствует одному измерению (размерности). Система МВхМВых может обеспечить улучшенную производительность (например, увеличенную пропускную способность передачи и (или) бóльшую надежность), если используются дополнительные размерности, созданные множеством передающих и приемных антенн.
пространственных каналов, при ≤ {min , }. Каждый из пространственных каналов соответствует одному измерению (размерности). Система МВхМВых может обеспечить улучшенную производительность (например, увеличенную пропускную способность передачи и (или) бóльшую надежность), если используются дополнительные размерности, созданные множеством передающих и приемных антенн.
Ресурсы для заданной системы связи, как правило, ограничиваются различными регулирующими ограничениями и требованиями, и иными практическими соображениями. Однако от системы может требоваться поддержка нескольких терминалов, обеспечение разнесенных услуг, достижение определенных уровней показателей и т.д.
Поэтому в технике имеется необходимость в системе БЛВС МВхМВых, способной поддерживать множество пользователей и обеспечивать высокую производительность системы.
Сущность изобретения
Заявлена система множественного доступа БЛВС МВхМВых, имеющая различные возможности и способная достичь высокой производительности. В варианте осуществления эта система применяет МВхМВых и мультиплексирование с ортогональным разделением частот (МОРЧ) (OFDM) для достижения высокой пропускной способности, борьбы с вредными эффектами на трассе распространения и обеспечения других выгод. Каждый пункт доступа в этой системе может поддерживать множество пользовательских терминалов. Выделение ресурсов нисходящей и восходящей линий зависит от требований пользовательских терминалов, канальных условий и иных факторов.
Также предлагается канальная структура, поддерживающая эффективные передачи нисходящей и восходящей линий. Эта канальная структура содержит ряд транспортных каналов, которые могут использоваться для таких функций, как сигнализация о параметрах системы и назначениях ресурсов, передача данных по нисходящей и восходящей линиям, случайный доступ системы и т.д. Различные свойства этих транспортных каналов являются конфигурируемыми, что позволяет системе легко адаптироваться к изменению канала и условиям загрузки.
Множество скоростей передачи и режимов передачи поддерживаются системой БЛВС МВхМВых, чтобы достичь высокой пропускной способности, когда она поддерживается канальными условиями и возможностями пользовательских терминалов. Эти скорости передачи устанавливаются на основании оценок канальных условий и могут выбираться независимо для нисходящей и восходящей линий. Могут также использоваться различные режимы передачи в зависимости от числа антенн в пользовательских терминалах и от канальных условий. Каждый режим передачи ассоциируется с различной пространственной обработкой в передатчике и приемнике и может выбираться для использования при различных рабочих условиях. Пространственная обработка облегчает передачу данных от множества передающих антенн и (или) прием данных множеством приемных антенн для более высокой пропускной способности и (или) более высокой степени разнесения.
В варианте осуществления система БЛВС МВхМВых использует единственную частотную полосу как для нисходящей, так и для восходящей линий, которые совместно используют одну и ту же рабочую полосу с использованием дуплексирования с временным разделением (ДВР) (TDD). Для системы ДВР канальные отклики нисходящей и восходящей линий являются взаимно обратными величинами. Здесь предлагаются методы калибровки для нахождения и учета различий в частотных откликах цепей передачи-приема в пункте доступа и пользовательских терминалах. Здесь также описываются методы для упрощения пространственной обработки в пункте доступа и пользовательских терминалах путем использования преимущества обратимости природы нисходящей и восходящей линий и калибровки.
Предлагается также структура пилот-сигналов с несколькими типами пилот-сигнала для различных функций. К примеру, маяковый пилот-сигнал может использоваться для захвата частоты и обнаружения системы, МВхМВых пилот-сигнал может использоваться для оценки канала, управляемый эталон (т.е. управляемый пилот-сигнал) может использоваться для улучшенной оценки канала, а несущий пилот-сигнал может использоваться для слежения за фазой.
Предлагаются также различные контура управления для надлежащей работы системы. Управление скоростью передачи может осуществляться независимо на нисходящей и восходящей линии. Управление мощностью может осуществляться для некоторых передач (к примеру, услуг с фиксированной скоростью передачи). Управление синхронизацией может использоваться для передач восходящей линии, чтобы учитывать различные задержки распространения для пользовательских терминалов, расположенных повсюду в системе.
Предлагаются также методы случайного доступа для обеспечения пользовательским терминалам возможности доступа к системе. Эти методы поддерживают доступ к системе множества пользовательских терминалов, быстрое уведомление о попытках доступа к системе и быстрое назначение ресурсов нисходящей/восходящей линий.
Ниже более подробно описываются различные аспекты и варианты осуществления изобретения.
Краткое описание чертежей
Признаки и сущность настоящего изобретения поясняются в изложенном ниже подробном описании, иллюстрируемом чертежами, на которых одинаковые ссылочные позиции обозначают повсюду одни и те же элементы, и на которых представлено следующее:
Фиг.1 - система БЛВС МВхМВых;
Фиг.2 - структура уровней для системы БЛВС МВхМВых;
Фиг.3А, 3В и 3С - структура кадра TDD-TDM, структура кадра FDD-TDM и структура кадра FDD-CDM, соответственно;
Фиг.4 - структура кадра TDD-TDM с пятью транспортными каналами - BCH, FCCH, FCH, RCH и RACH;
Фиг.5А-5G - различные форматы протокольного блока данных (ПБД) (PDU) для пяти транспортных каналов;
Фиг.6 - структура для пакета FCH/RCH;
Фиг.7 - пункт доступа и два пользовательских терминала;
Фиг.8А, 9А и 10А - три передающих блока для режимов разнесения, пространственного мультиплексирования и управления лучом, соответственно;
Фиг.8В, 9В и 10В - три процессора разнесения ТХ для режимов разнесения, пространственного мультиплексирования и управления лучом, соответственно;
Фиг.8С - модулятор МОРЧ;
Фиг.8D - символ МОРЧ;
Фиг.11А - блок формирования кадра и скремблер в процессоре данных ТХ;
Фиг.11В - кодер и блок повторения-перфорирования в процессоре данных ТХ;
Фиг.11С - другой процессор данных ТХ, который может быть использован для режима пространственного мультиплексирования;
Фиг.12А и 12В - диаграмма состояний для работы пользовательского терминала;
Фиг.13 - временная шкала для RACH;
Фиг.14А и 14В - процессы управления скоростями передач, соответственно, нисходящей и восходящей линий;
Фиг.15 - иллюстрация действия контура управления мощностью; и
Фиг.16 - процесс регулировки синхронизации восходящей линии для пользовательского терминала.
Подробное описание
Слово "примерный" используется исключительно как "служащий в качестве примера, случая или иллюстрации". Любой вариант осуществления или проект, описанный здесь как "примерный", не обязательно интерпретировать как предпочтительный или преимущественный относительно других вариантов осуществления или проектов.
I. Обзор системы
Фиг.1 показывает систему 100 БЛВС МВхМВых, которая поддерживает множество пользователей и способна воплощать различные варианты осуществления изобретения. Система 100 БЛВС МВхМВых включает в себя несколько пунктов 110 доступа (ПД) (АР), которые поддерживают связь для нескольких пользовательских терминалов 120 (ПТ) (UT). Для простоты на фиг.1 показаны только два пункта 110 доступа. Пункт доступа представляет собой, как правило, стационарную станцию, которая используется для связи с пользовательскими терминалами. Пункт доступа может также определяться как базовая станция или каким-либо иным термином.
Пользовательские терминалы 120 могут быть распределены повсюду в системе. Каждый пользовательский терминал может быть стационарным или подвижным терминалом, который может связываться с пунктом доступа. Пользовательский терминал может также упоминаться как мобильная станция, удаленная станция, терминал доступа, пользовательское оборудование (ПО) (UE), беспроводное устройство, или обозначаться каким-либо иным термином. Каждый пользовательский терминал может связываться с одним или, возможно, множеством пунктов доступа по нисходящей и (или) восходящей линии в любой заданный момент времени. Нисходящей линией (т.е. прямой линией) именуется передача от пункта доступа к пользовательскому терминалу, а восходящей линией (т.е. обратной линией) именуется передача от пользовательского терминала к пункту доступа.
На фиг.1 пункт 110а доступа связывается с пользовательскими терминалами 120а-120f, а пункт 110b доступа связывается с пользовательскими терминалами 120f-120k. В зависимости от конкретного выполнения системы 100, пункт доступа может связываться со множеством пользовательских терминалов одновременно (например, во множестве кодовых каналов или поддиапазонов) или последовательно (например, во множестве временных сегментов). В любой заданный момент времени пользовательский терминал может принимать передачи нисходящей линии от одного или множества пунктов доступа. Передача нисходящей линии от каждого пункта доступа может включать в себя дополнительные служебные данные, предназначенные для их приема множеством пользовательских терминалов, конкретные пользовательские данные, предназначенные для их приема конкретным пользовательским терминалом, другие типы данных или любое их сочетание. Дополнительные служебные данные могут включать в себя пилот-сигнал, сообщения поискового вызова и широковещательные сообщения, параметры системы и т.д.
Система БЛВС МВхМВых базируется на сетевой архитектуре с централизованным контроллером. Так, системный контроллер 130 связан с пунктами 110 доступа и может далее связываться с другими системами и сетями. К примеру, системный контроллер 130 может связываться с сетью пакетированных данных (СПД) (PDN), с проводной локальной вычислительной сетью (ЛВС) (LAN), с широкомасштабной сетью (ШМС) (WAN), с Интернетом, с телефонной сетью общего пользования (ТСОП) (PSTN), с сетью сотовой связи и т.д. Системный контроллер 130 может быть спроектирован для выполнения нескольких функций, таких как (1) координация и управление для подсоединенных к нему пунктов доступа, (2) маршрутизация данных между этими пунктами доступа, (3) доступ и управление связью с пользовательскими терминалами, обслуживаемыми этими пунктами доступа, и т.д.
Система БЛВС МВхМВых может обеспечивать высокую пропускную способность с возможностью значительно большего покрытия, нежели традиционные системы БЛВС. Система БЛВС МВхМВых может поддерживать синхронные, асинхронные и изохронные услуги по передаче данных/речи. Система БЛВС МВхМВых может быть спроектирована для обеспечения следующих характеристик:
- Высокая надежность обслуживания
- Гарантированное качество обслуживания (КО) (QoS)
- Высокие мгновенные скорости передачи данных
- Высокая спектральная эффективность
- Расширенный диапазон покрытия.
Система БЛВС МВхМВых может работать в различных полосах частот (например, полосы U-NII 2,4 ГГц и 5,х ГГц), при условиях ограничений по ширине полосы и излучению, свойственных выбранной рабочей полосе. Система может размещаться как внутри, так и вне помещения, с типичным максимальным размером сотовой ячейки 1 км или меньше. Система поддерживает приложения стационарных терминалов, хотя некоторые рабочие режимы также поддерживают работу портативных и имеющих ограниченную мобильность терминалов.
1. МВхМВых, МВхОВых и ОВхМВых
В конкретном варианте выполнения и как описывается далее в описании, каждый пункт доступа снабжен четырьмя передающими и приемными антеннами для передачи и приема данных, причем одни и те же четыре антенны используются для передачи и для приема. Система также поддерживает случай, когда передающие и приемные антенны устройства (например, пункта доступа, пользовательского терминала) не используются совместно, хотя эта конфигурация в нормальном состоянии обеспечивает более низкую производительность, чем при совместном использовании антенн. Система БЛВС МВхМВых может также проектироваться так, чтобы каждый пункт доступа был оборудован некоторым другим числом передающих/приемных антенн. Каждый пользовательский терминал может быть снабжен единственной передающей/приемной антенной или множеством передающих/приемных антенн для передачи и приема. Число антенн, используемых каждым типом пользовательского терминала, может зависеть от различных факторов, таких как, к примеру, услуги, поддерживаемые пользовательским терминалом (например, речь, данные или обе), соображения стоимости, регулирующие ограничения, вопросы надежности и т.д.
Для заданной пары многоантенного пункта доступа и многоантенного пользовательского терминала канал МВхМВых образуется передающими антеннами и приемными антеннами, доступными для использования для передачи данных. Различные каналы МВхМВых формируются между пунктом доступа и различными многоантенными пользовательскими терминалами. Каждый канал МВхМВых может быть разделен на  пространственных каналов, где
пространственных каналов, где  ≤ min {
≤ min { ,
,  }.
}.  потоков данных могут передаваться по
потоков данных могут передаваться по  пространственным каналам. Пространственная обработка требуется в приемнике и может выполняться или не выполняться в передатчике для передачи множества потоков данных по
пространственным каналам. Пространственная обработка требуется в приемнике и может выполняться или не выполняться в передатчике для передачи множества потоков данных по  пространственным каналам.
пространственным каналам.
 пространственных каналов могут быть, а могут и не быть ортогональны друг другу. Это зависит от разных факторов, таких как (1) выполнялась ли пространственная обработка в передатчике, чтобы получить ортогональные пространственные каналы, и (2) была ли пространственная обработка как в передатчике, так и в приемнике успешной при ортогонализации пространственных каналов. Если в передатчике не выполняется никакой пространственной обработки, то
пространственных каналов могут быть, а могут и не быть ортогональны друг другу. Это зависит от разных факторов, таких как (1) выполнялась ли пространственная обработка в передатчике, чтобы получить ортогональные пространственные каналы, и (2) была ли пространственная обработка как в передатчике, так и в приемнике успешной при ортогонализации пространственных каналов. Если в передатчике не выполняется никакой пространственной обработки, то  пространственных каналов могут формироваться
пространственных каналов могут формироваться  передающими антеннами, и маловероятно, что они будут ортогональны друг другу.
передающими антеннами, и маловероятно, что они будут ортогональны друг другу.
 пространственных каналов могут быть ортогонализированы путем выполнения декомпозиции на матрице канальных откликов для канала МВхМВых, как описано ниже. Каждый пространственный канал упоминается как собственная мода канала МВхМВых, если
пространственных каналов могут быть ортогонализированы путем выполнения декомпозиции на матрице канальных откликов для канала МВхМВых, как описано ниже. Каждый пространственный канал упоминается как собственная мода канала МВхМВых, если  пространственных каналов ортогонализированы с помощью декомпозиции, что требует пространственной обработки как в передатчике, так и в приемнике, как описано ниже. В этом случае
пространственных каналов ортогонализированы с помощью декомпозиции, что требует пространственной обработки как в передатчике, так и в приемнике, как описано ниже. В этом случае  потоков данных могут передаваться ортогонально на собственных модах. Однако собственная мода обычно считается теоретическим построением.
потоков данных могут передаваться ортогонально на собственных модах. Однако собственная мода обычно считается теоретическим построением.  пространственных каналов, как правило, не полностью ортогональны друг другу вследствие различных причин. Например, пространственные каналы не будут ортогональными, если (1) передатчик не имеет информации о канале МВхМВых или (2) передатчик и (или) приемник имеют несовершенную оценку канала МВхМВых. Для простоты, в нижеследующем описании термин "собственная мода" используется для обозначения случая, когда делается попытка ортогонализировать пространственные каналы с использованием декомпозиции, даже если эта попытка может и не быть полностью успешной, например, из-за несовершенной оценки канала.
пространственных каналов, как правило, не полностью ортогональны друг другу вследствие различных причин. Например, пространственные каналы не будут ортогональными, если (1) передатчик не имеет информации о канале МВхМВых или (2) передатчик и (или) приемник имеют несовершенную оценку канала МВхМВых. Для простоты, в нижеследующем описании термин "собственная мода" используется для обозначения случая, когда делается попытка ортогонализировать пространственные каналы с использованием декомпозиции, даже если эта попытка может и не быть полностью успешной, например, из-за несовершенной оценки канала.
Для заданного числа (к примеру, четырех) антенн в пункте доступа число пространственных каналов, доступных для каждого пользовательского терминала, зависит от числа антенн, используемых этим пользовательским терминалом, и от характеристик беспроводного канала МВхМВых, который связывает антенны пункта доступа и антенны пользовательского терминала. Если пользовательский терминал снабжен одной антенной, то четыре антенны в пункте доступа и единственная антенна в пользовательском терминале образуют канал со множеством входов и одним выходом (МВхОВых) (MISO) для нисходящей линии, и канал с одним входом и множеством выходов (ОВхМВых) (SIMO) для восходящей линии.
Система БЛВС МВхМВых может быть спроектирована для поддержания нескольких режимов передачи. Таблица 1 перечисляет режимы передачи, поддерживаемые примерным проектом системы БЛВС МВхМВых.
Для простоты, термин "разнесение" в нижеследующем описании относится к разнесению передачи, если не отмечено иное.
Режимы передачи, доступные для использования для нисходящей линии и для восходящей линии для каждого пользовательского терминала зависят от числа антенн, используемых в пользовательском терминале. Таблица 2 перечисляет режимы передачи, доступные для разных типов терминалов для нисходящей линии и восходящей линии в предположении множества (например, четырех) антенн в пункте доступа.
Для нисходящей линии все режимы передачи за исключением режима пространственного мультиплексирования могут использоваться для одноантенных пользовательских терминалов, и все режимы передачи могут использоваться для многоантенных пользовательских терминалов. Для восходящей линии все режимы передачи могут использоваться многоантенными пользовательскими терминалами, тогда как одноантенные пользовательские терминалы используют режим ОВхМВых для передачи данных одной доступной антенной. Для ОВхМВых может использоваться разнесение на приеме (т.е. прием передаваемых данных множеством приемных антенн), а также режимы управления лучом.
Система БЛВС МВхМВых может также быть спроектирована для поддержания различных других режимов передачи, что также входит в объем изобретения. Например, режим формирования луча может использоваться для передачи данных на единственной собственной моде с использованием как амплитудной, так и фазовой информации для собственной моды (вместо одной лишь фазовой информации, которая только и используется режимом управления лучом). В качестве другого примера, может быть определен "неуправляемый" режим пространственного мультиплексирования, посредством чего передатчик просто передает множество потоков данных множеством передающих антенн (без какой бы то ни было пространственной обработки), а приемник выполняет пространственную обработку, необходимую для выделения и восстановления потоков данных от множества передающих антенн. В качестве еще одного примера, может быть определен режим "многопользовательского" пространственного мультиплексирования, посредством чего пункт доступа передает множество потоков данных множеством передающих антенн (с пространственной обработкой) ко множеству пользовательских терминалов одновременно по нисходящей линии. В качестве еще одного примера, может быть определен режим пространственного мультиплексирования, посредством чего передатчик выполняет пространственную обработку, пытаясь ортогонализировать множество потоков данных, посланных на множество передающих антенн (что может не быть полностью успешным из-за несовершенной оценки канала), а приемник выполняет необходимую пространственную обработку для выделения и восстановления потоков данных, переданных множеством передающих антенн. Таким образом, пространственная обработка для передачи множества потоков данных через множество пространственных каналов может выполняться (1) как в передатчике, так и в приемнике, (2) только в приемнике или (3) только в передатчике. Различные режимы пространственного мультиплексирования могут использоваться в зависимости от, к примеру, возможностей пункта доступа и пользовательских терминалов, доступной информации о состоянии канала, требований системы и т.д.
В общем, пункты доступа и пользовательские терминалы могут быть спроектированы с несколькими передающими и приемными антеннами. Для ясности, ниже описываются конкретные варианты осуществления и проекты, в соответствии с которыми каждый пункт доступа снабжен четырьмя передающими/приемными антеннами, а каждый пользовательский терминал снабжен четырьмя или меньше передающими/приемными антеннами.
2. МОРЧ
В варианте осуществления система БЛВС МВхМВых использует МОРЧ для эффективного разделения всей системной ширины полосы на несколько ( ) ортогональных поддиапазонов. Эти поддиапазоны именуются также тонами, бинами (элементами дискретизации) или частотными каналами. При МОРЧ каждый поддиапазон ассоциируется с соответствующей поднесущей, которая может быть промодулирована данными. Для системы МВхМВых, которая использует МОРЧ, каждый пространственный канал каждого поддиапазона может рассматриваться как независимый канал передачи, где комплексное усиление, связанное с каждым поддиапазоном, эффективно ограничивается по ширине полосы поддиапазона.
) ортогональных поддиапазонов. Эти поддиапазоны именуются также тонами, бинами (элементами дискретизации) или частотными каналами. При МОРЧ каждый поддиапазон ассоциируется с соответствующей поднесущей, которая может быть промодулирована данными. Для системы МВхМВых, которая использует МОРЧ, каждый пространственный канал каждого поддиапазона может рассматриваться как независимый канал передачи, где комплексное усиление, связанное с каждым поддиапазоном, эффективно ограничивается по ширине полосы поддиапазона.
В варианте осуществления ширина полосы системы разделяется на 64 ортогональных поддиапазона (т.е.  =64), которым назначаются индексы от -32 до +31. Из этих 64 поддиапазонов используются для данных 48 поддиапазонов (например, с индексами ±{1, …, 6, 8, …, 20, 22, …, 26}), 4 поддиапазона (например, с индексами ±{7, 21}) используются для пилотного сигнала и, возможно, сигнализации, поддиапазон постоянной составляющей (DC) (с индексом 0) не используется, и остальные поддиапазоны не используются и служат в качестве защитных поддиапазонов. Эта структура поддиапазонов МОРЧ описывается более подробно в документе стандарта 802.11а IEEE "Часть 11: Спецификация управления доступом к среде (МАС) беспроводной ЛВС и физического уровня (PHY): Высокоскоростной физический уровень в диапазоне 5 ГГц", сентябрь 1999, который общедоступен и включен в настоящее описание посредством ссылки. Различное число поддиапазонов и различные иные структуры поддиапазонов МОРЧ могут также воплощаться для системы БЛВС МВхМВых, что также входит в объем изобретения. Например, все 53 поддиапазона с индексами от -26 до +26 могут использоваться для передачи данных. В качестве другого примера, могут использоваться 128-поддиапазонная структура, 256-поддиапазонная структура или поддиапазонная структура с каким-либо иным числом поддиапазонов. Для ясности, ниже описывается система БЛВС МВхМВых с 64-поддиапазонной структурой, описанной выше.
=64), которым назначаются индексы от -32 до +31. Из этих 64 поддиапазонов используются для данных 48 поддиапазонов (например, с индексами ±{1, …, 6, 8, …, 20, 22, …, 26}), 4 поддиапазона (например, с индексами ±{7, 21}) используются для пилотного сигнала и, возможно, сигнализации, поддиапазон постоянной составляющей (DC) (с индексом 0) не используется, и остальные поддиапазоны не используются и служат в качестве защитных поддиапазонов. Эта структура поддиапазонов МОРЧ описывается более подробно в документе стандарта 802.11а IEEE "Часть 11: Спецификация управления доступом к среде (МАС) беспроводной ЛВС и физического уровня (PHY): Высокоскоростной физический уровень в диапазоне 5 ГГц", сентябрь 1999, который общедоступен и включен в настоящее описание посредством ссылки. Различное число поддиапазонов и различные иные структуры поддиапазонов МОРЧ могут также воплощаться для системы БЛВС МВхМВых, что также входит в объем изобретения. Например, все 53 поддиапазона с индексами от -26 до +26 могут использоваться для передачи данных. В качестве другого примера, могут использоваться 128-поддиапазонная структура, 256-поддиапазонная структура или поддиапазонная структура с каким-либо иным числом поддиапазонов. Для ясности, ниже описывается система БЛВС МВхМВых с 64-поддиапазонной структурой, описанной выше.
Для МОРЧ подлежащие передаче данные в каждом поддиапазоне сначала модулируются (т.е. осуществляется отображение символов) с помощью конкретной схемы модуляции, выбранной для использования в этом поддиапазоне. Нули соответствуют неиспользуемым поддиапазонам. Для каждого символьного периода символы модуляции и нули для всех  поддиапазонов преобразуются во временную область с использованием обратного быстрого преобразования Фурье (ОБПФ) (IFFT) для получения преобразованного символа, который содержит
поддиапазонов преобразуются во временную область с использованием обратного быстрого преобразования Фурье (ОБПФ) (IFFT) для получения преобразованного символа, который содержит  отсчетов во временной области. Длительность каждого преобразованного символа взаимно обратно связана с шириной полосы каждого символа. В одном конкретном проекте для системы БЛВС МВхМВых ширина полосы системы составляет 20 МГц,
отсчетов во временной области. Длительность каждого преобразованного символа взаимно обратно связана с шириной полосы каждого символа. В одном конкретном проекте для системы БЛВС МВхМВых ширина полосы системы составляет 20 МГц,  =64, ширина полосы каждого символа составляет 312,5 кГц, а длительность каждого символа равна 3,2 мкс.
=64, ширина полосы каждого символа составляет 312,5 кГц, а длительность каждого символа равна 3,2 мкс.
МОРЧ может обеспечить некоторые преимущества, такие как противодействие эффекту частотно-селективного замирания, которое характеризуется различным усилением канала на различных частотах всей системной ширины полосы. Общеизвестно, что частотно-селективное замирание вызывает межсимвольную интерференцию (МСИ) (ISI), за счет которой каждый символ в принятом сигнале действует как искажение для последующих символов в принятом сигнале. Искажение МСИ ухудшает производительность, воздействуя на способность правильно детектировать принятые символы. С частотно-селективным замиранием можно бороться с помощью МОРЧ путем повторения каждого преобразованного символа (или прибавления циклического префикса к каждому преобразованному символу) для формирования соответствующего символа МОРЧ, который затем и передается.
Длина циклического префикса (т.е. значение для повторения) для каждого символа МОРЧ зависит от разброса задержек беспроводного канала. В частности, для эффективной борьбы с МСИ циклический префикс должен быть длиннее, чем максимальный ожидаемый разброс задержек для системы.
В варианте осуществления для символов МОРЧ могут использоваться циклические префиксы разных длительностей, зависящие от ожидаемого разброса задержек. Для конкретной вышеописанной системы БЛВС МВхМВых может быть выбран циклический префикс длительностью 400 мкс (8 отсчетов) или 800 мкс (16 отсчетов) для использования для символов МОРЧ. "Короткий" символ МОРЧ использует циклический префикс длительностью 400 нс и имеет длительность 3,6 кс. "Длинный" символ МОРЧ использует циклический префикс 800 кс и имеет длительность 4,0 мкс. Короткие символы МОРЧ могут использоваться, если максимальный ожидаемый разброс задержки составляет 400 мкс и менее, а длинные символы МОРЧ могут использоваться, если разброс задержек больше, чем 400 мкс. Для использования с разными транспортными каналами могут выбираться разные циклические префиксы, и циклический префикс может также выбираться динамически, как описано ниже. За счет использования, когда это возможно, более короткого циклического префикса можно повысить пропускную способность системы, поскольку большее число символов МОРЧ более короткой длительности можно передавать в заданном фиксированном временном интервале.
Система БЛВС МВхМВых может быть также спроектирована без использования МОРЧ, что также входит в объем изобретения.
3. Уровневая структура
Фиг.2 иллюстрирует уровневую структуру 200, которая может использоваться с системой БЛВС МВхМВых. Уровневая структура 200 включает в себя (1) приложения и протоколы верхнего уровня, которые примерно соответствуют Уровню 3 или выше в эталонной модели ISO/OSI (верхние уровни), (2) протоколы и услуги, которые соответствуют Уровню 2 (уровень линии), и (3) протоколы и услуги, которые соответствуют Уровню 1 (физический уровень).
Верхние уровни включают в себя различные приложения и протоколы, такие как услуги 212 сигнализации, услуги 214 передачи данных, услуги 214 речевой передачи, приложения схемных данных и т.д. Сигнализация обычно обеспечивается как сообщения, а данные - как пакеты. Услуги и приложения в верхних уровнях инициируют и завершают сообщения и пакеты согласно семантике и синхронизации протокола связи между пунктом доступа и пользовательским терминалом. Верхние уровни используют услуги, предоставленные Уровнем 2.
Уровень 2 поддерживает доставку сообщений и пакетов, генерируемых верхними уровнями. В варианте осуществления, показанном на фиг.2, уровень 2 включает в себя подуровень 220 управления доступом к линии (УДЛ) (LAC) и подуровень 230 управления доступом к среде передачи (УДС) (МАС). Подуровень УДЛ воплощает протокол линии передачи данных, который предусматривает правильный перенос и доставку сообщений, генерируемых верхними уровнями. Подуровень УДЛ использует услуги, предоставленные подуровнем УДС и Уровнем 1. Подуровень УДС отвечает за передачу сообщений и пакетов с использованием услуг, обеспеченных Уровнем 1. Подуровень УДС управляет доступом к ресурсам Уровня 1 посредством приложений и услуг в верхних уровнях. Подуровень УДС может включать в себя протокол 232 радиолинии (ПРЛ) (RLP), являющийся механизмом повторной передачи, который может использоваться для обеспечения более высокой надежности для пакетированных данных. Уровень 2 выдает протокольные блоки данных (ПБД) (PDU) на Уровень 1.
Уровень 1 содержит физический уровень 240 и поддерживает передачу и прием радиосигналов между пунктом доступа и пользовательским терминалом. Этот физический уровень выполняет кодирование, перемежение, модуляцию и пространственную обработку для различных транспортных каналов, используемых для посылки сообщений и пакетов, генерируемых верхними уровнями. В этом варианте осуществления физический уровень включает в себя подуровень 242 мультиплексирования, который мультиплексирует обработанные ПВД для различных транспортных каналов в надлежащий кадровый формат. Уровень 1 обеспечивает данные в блоках кадров.
Фиг.2 показывает конкретный вариант осуществления уровневой структуры, которая может быть использована для системы БЛВС МВхМВых. Различные иные пригодные уровневые структуры могут также проектироваться и использоваться для системы БЛВС МВхМВых, это также входит в объем изобретения. Более подробно функции, выполняемые каждым уровнем, описаны ниже, где это уместно.
4. Транспортные каналы
Системой БЛВС МВхМВых могут поддерживаться ряд услуг и приложений. Кроме того, для надлежащей работы системы может потребоваться передача других данных пунктом доступа или обмен данными между пунктом доступа и пользовательскими терминалами. Ряд транспортных каналов может быть определен для системы БЛВС МВхМВых для переноса разных типов данных. Таблица 3 перечисляет примерный набор транспортных каналов, а также обеспечивает краткое описание для каждого транспортного канала.
Как показано в Таблице 3, транспортные каналы нисходящей линии, используемые пунктом доступа, включают в себя BCH, FCCH и FCH. Транспортные каналы восходящей линии, используемые пользовательскими терминалами, включают в себя RACH и RCH. Каждый из этих транспортных каналов описывается более подробно ниже.
Транспортные каналы, перечисленные в Таблице 3, представляют конкретный вариант осуществления канальной структуры, которая может быть использована для системы БЛВС МВхМВых. Меньшее число, дополнительные и (или) отличающиеся транспортные каналы могут также быть определены для использования в системе БЛВС МВхМВых. Например, некоторые функции могут поддерживаться специфичными для функции транспортными каналами (к примеру, каналами пилот-сигнала, поискового вызова, управления мощностью и каналами синхронизации). Таким образом, другие структуры каналов с различными наборами транспортных каналов могут быть определены и использоваться в системе БЛВС МВхМВых, это также входит в объем изобретения.
5. Структуры кадров
Для транспортных каналов может быть определен ряд структур кадров. Конкретная структура кадров для использования в системе БЛВС МВхМВых зависит от различных факторов, таких, к примеру, как (1) используются ли одни и те же или разные полосы частот для нисходящей и восходящей линий и (2) схема мультиплексирования, используемая для мультиплексирования транспортных каналов вместе.
Если доступна только одна полоса частот, то нисходящая и восходящая линии могут передаваться в разных фазах кадра с использованием дуплексирования с временным разделением (ДВР) (TDD), как описано ниже. Если доступны две полосы частот, то нисходящая и восходящая линии могут передаваться в разных полосах частот с помощью дуплексирования с частотным разделением (ДЧР) (FDD).
Как для ДВР, так и для ДЧР транспортные каналы могут мультиплексироваться посредством мультиплексирования с временным разделением (МВР) (TDM), мультиплексирования с кодовым разделением (МКР) (CDM), мультиплексирования с частотным разделением (МЧР) (FDM) и т.д. Для МВР каждый транспортный канал назначается отличной части кадра. Для МКР транспортные каналы передаются совместно, но каждый транспортный канал формируется отличающимся кодом формирования каналов, аналогично тому, что выполняется в системе множественного доступа с кодовым разделением каналов (МДКР). Для МЧР каждый транспортный канал назначается отличающейся части полосы частот для линии.
В Таблице 4 перечислены различные структуры кадров, которые могут использоваться для переноса транспортных каналов. Каждая из этих структур кадров описана более подробно ниже. Для ясности, структуры кадров описаны для набора транспортных каналов, перечисленных в Таблице 3.
Фиг.3А иллюстрирует вариант осуществления структуры 300а кадров ДВР-МВР, которая может использоваться, если единственная полоса частот используется как для нисходящей, так и для восходящей линий. Передача данных осуществляется блоками кадров ДВР. Каждый кадр ДВР может быть определен, как перекрывающий конкретную временную длительность. Длительность кадра может быть выбрана на основании различных факторов, таких как, например, (1) ширина полосы рабочего диапазона, (2) ожидаемые размеры ПБД для транспортных каналов и т.д. В общем, более короткие длительности кадра могут обеспечить сниженные задержки. Однако более длинные длительности кадра могут быть более эффективными, поскольку заголовок и дополнительные служебные данные могут представлять меньшую часть кадра. В конкретном варианте осуществления каждый кадр ДВР имеет длительность 2 мс.
Каждый кадр ДВР разделяется на фазу нисходящей линии и фазу восходящей линии. Фаза нисходящей линии подразделяется на три сегмента для трех транспортных каналов нисходящей линии - BCH, FCCH и FCH. Фаза восходящей линии подразделяется на два сегмента для двух транспортных каналов восходящей линии - RCH и RACH.
Сегмент для каждого транспортного канала может быть определен, как имеющий фиксированную длительность или переменную длительность, которая может изменяться от кадра к кадру. В варианте осуществления сегмент ВСН определяется как имеющий фиксированную длительность, а сегменты FCCH, FCH, RCH и RACH определяются как имеющие переменные длительности.
Сегмент для каждого транспортного канала может использоваться для переноса одного или более протокольных блоков данных (ПБД) для этого транспортного канала. В конкретном варианте осуществления, показанном на фиг.3А, ПБД ВСН передается в первом сегменте 310, ПБД FCCH передается во втором сегменте 320, а один или более ПБД FCH передаются в третьем сегменте 330 фазы нисходящей линии. В фазе восходящей линии один или более ПБД RCH передаются в четвертом сегменте 340, а один или более ПБД RACH передаются в пятом сегменте 350 кадра ДВР.
Структура 300а кадров представляет конкретное размещение различных транспортных каналов в кадре ДВР. Это размещение может обеспечить некоторый выигрыш, такой как сниженные задержки для передачи данных в нисходящей и восходящей линиях. ВСН передается первым в кадре ДВР, поскольку он переносит параметры системы, которые могут использоваться для ПБД остальных транспортных каналов в том же самом кадре ДВР. FCCH передается следующим, поскольку он переносит информацию назначения канала, указывающую, какой(-ие) пользовательский(-ие) терминал(-ы) назначены для приема данных нисходящей линии по прямому каналу (FCH) и какой(-ие) пользовательский(-е) терминал(ы) назначен(ы) для передачи данных восходящей линии в обратном канале (RCH) в текущем кадре ДВР. Другие структуры кадров ДВР-МВР также могут быть определены и могут использоваться для системы БЛВС МВхМВых, что также входит в объем изобретения.
Фиг.3В иллюстрирует вариант осуществления структуры 300b кадров ДЧР-МВР, которая может использоваться, если нисходящая и восходящая линии передаются с помощью двух отдельных полос частот. Данные нисходящей линии передаются в кадре 302а нисходящей линии, а данные восходящей линии передаются в кадре 302b восходящей линии. Каждый кадр нисходящей и восходящей линий может быть определен, чтобы перекрывать конкретную временную длительность (к примеру, 2 мс). Для простоты, кадры нисходящей и восходящей линий могут быть определены, как имеющие одну и ту же длительность, и могут также быть определены для выравнивания на границах кадра. Однако для нисходящей и восходящей линий могут также использоваться отличающиеся длительности кадров и (или) невыровненные (т.е. сдвинутые) границы кадра.
Как показано на фиг.3В, кадр нисходящей линии разделяется на три сегмента для трех транспортных каналов нисходящей линии. Кадр восходящей линии разделяется на два сегмента для двух транспортных каналов восходящей линии. Сегмент для каждого транспортного канала может быть определен, как имеющий фиксированную или переменную длительность, и может использоваться для переноса одного или более ПБД для этого транспортного канала.
В конкретном варианте осуществления, показанном на фиг.3В, кадр нисходящей линии переносит ПБД ВСН, ПБД FCCH и один или более ПБД FCH в сегментах 310, 320 и 330, соответственно. Кадр восходящей линии переносит один или более ПБД RCH и один или более ПБД RACH в сегментах 340 и 350, соответственно. Это конкретное упорядочение может обеспечить выигрыш, описанный выше (например, сниженные задержки для передачи данных). Транспортные каналы могут иметь отличные форматы ПБД, как описано ниже. Другие структуры кадров ДЧР-МВР также могут быть определены и могут использоваться для системы БЛВС МВхМВых, что также входит в объем изобретения.
Фиг.3С иллюстрирует вариант осуществления структуры 300с кадров ДЧР-МКР/МЧР, которая также может использоваться, если нисходящая и восходящая линии передаются с использованием отдельных полос частот. Данные нисходящей линии могут передаваться в кадре 304а нисходящей линии, а данные восходящей линии могут передаваться в кадре 304b восходящей линии. Кадры нисходящей и восходящей линий могут быть определены как имеющие одну и ту же длительность (к примеру, 2 мс) и могут выравниваться на границах кадра.
Как показано на фиг.3С, три транспортных канала нисходящей линии передаются совместно в кадре нисходящей линии, а два транспортных канала восходящей линии передаются совместно в кадре восходящей линии. Для МКР транспортные каналы для каждой линии формируются с отличающимися кодами формирования каналов, которые могут быть кодами Уолша, кодами ортогонального переменного коэффициента расширения (ОПКР) (OVSF), квазиортогональными функциями (КОФ) (QOF) и т.д. Для МЧР транспортным каналам для каждой линии назначаются различные части полосы частот для линии. Для различных транспортных каналов в каждой линии могут также использоваться различные величины мощности передачи.
Другие структуры кадров могут быть также определены для транспортных каналов нисходящей и восходящей линий, что также входит в объем изобретения. Кроме того, можно использовать различные типы структур кадров для нисходящей и восходящей линий. Например, основанная на МВР структура кадров может использоваться для нисходящей линии, а основанная на МКР структура кадров может использоваться для восходящей линии.
В нижеследующем описании предполагается, что система БЛВС МВхМВых использует одну полосу частот для передач как нисходящей, так и восходящей линии. Для ясности, показанная на фиг.3А структура кадров ДВР-МВР используется для системы БЛВС МВхМВых. Для ясности, далее везде описывается конкретное воплощение структуры кадров ДВР-МВР. Для этого воплощения длительность каждого кадра ДВР установлена на 2 мс, а число символов МОРЧ на кадр ДВР является функцией от длины циклического префикса, используемого для символов МОЧР. ВСН имеет фиксированную длительность 80 мкс и использует для передаваемых символов МОЧР циклический префикс длительностью 800 нс. Остальная часть кадра ДВР содержит 480 символов МОЧР, если используется циклический префикс длиной 800 нс, и 533 символа МОЧР плюс 1,2 мкс избыточного времени, если используется циклический префикс длительностью 400 нс. Избыточное время может быть добавлено к охранному интервалу в конце сегмента RACH. Другие структуры кадров и другие воплощения также могут использоваться, и это входит в объем изобретения.
II. Транспортные каналы
Транспортные каналы используются для передачи данных различных типов и могут быть классифицированы в две группы: общие транспортные каналы и выделенные транспортные каналы. Поскольку общие и выделенные транспортные каналы используются для разных целей, для этих двух групп транспортных каналов может применяться разная обработка, как более подробно описано ниже.
Общие транспортные каналы. Общие транспортные каналы включают в себя ВСН, FCCH и RACH. Эти транспортные каналы используются для передачи данных ко множеству пользовательских терминалов или для приема данных от множества пользовательских терминалов. Для улучшения надежности ВСН и FCCH передаются пунктом доступа с использованием режима разнесения. По восходящей линии RACH передается пользовательскими терминалами с использованием режима управления лучом (если он поддерживается пользовательским терминалом). ВСН работает на известной фиксированной скорости передачи, так что пользовательские терминалы могут принимать и обрабатывать ВСН без какой-либо дополнительной информации. FCCH и RACH поддерживают множество скоростей передачи, чтобы обеспечить бóльшую эффективность. Термины "скорость передачи" или "набор скоростей передачи", как они использованы здесь, ассоциированы с конкретным кодовым режимом (или схемой кодирования) и конкретной схемой модуляции.
Выделенные транспортные каналы. Выделенные транспортные каналы включают в себя FCH и RCH. Эти транспортные каналы обычно используются для передачи специфичных пользовательских данных к конкретному пользовательскому терминалу или конкретным пользовательским терминалом. FCH и RCH могут динамически выделяться пользовательским терминалам по мере необходимости или по мере доступности. FCH (прямой канал) может также использоваться в широковещательном режиме для передачи дополнительных служебных, поисковых и широковещательных сообщений к пользовательским терминалам. В общем, дополнительные служебные, поисковые и широковещательные сообщения передаются перед любыми специфичными пользовательскими данными по каналу FCH.
Фиг.4 иллюстрирует примерную передачу по каналам ВСН, FCCH, FCH, RCH и RACH на основе структуры 300а кадров ДВР-МВР. В данном варианте осуществления один ПБД 410 ВСН и один ПБД 420 FCCH передаются в сегменте 310 ВСН и сегменте 320 FCCH, соответственно. Сегмент 330 FCH может использоваться для передачи одного или более ПБД 430 FCH, каждый из которых может предназначаться для конкретного пользовательского терминала или множества пользовательских терминалов. Аналогично, один или более ПБД 440 RCH могут передаваться одним или более пользовательскими терминалами в сегменте 340 RCH. Начало каждого ПБД FCH/RCH указывается сдвигом FCH/RCH от конца предыдущего сегмента. Ряд ПБД 450 RACH могут передаваться в сегменте 350 RACH несколькими пользовательскими терминалами для обращения к системе и (или) передачи коротких сообщений, как описано ниже.
Для ясности, транспортные каналы описываются для конкретной структуры кадров ДВР-МВР, показанной на фиг.3А и 4.
1. Широковещательный канал (ВСН) - нисходящая линия
Канал ВСН используется пунктом доступа для передачи маякового пилот-сигнала, пилот-сигнала МВхМВых, и параметров системы к пользовательским терминалам. Маяковый пилот-сигнал используется пользовательскими терминалами для получения системного тактирования и частоты. Пилот-сигнал МВхМВых используется пользовательскими терминалами для оценки канала МВхМВых, образованного антеннами пункта доступа и их собственными антеннами. Маяковый сигнал и пилот-сигнал МВхМВых более подробно описаны ниже. Параметры системы определяют различные свойства передач нисходящей и восходящей линий. Например, поскольку длительности сегментов FCCH, FCH, RACH и RCH являются переменными, параметры системы, которые определяют длительность каждого из этих сегментов для текущего кадра ДВР, передаются в ВСН.
Фиг.5А иллюстрирует вариант осуществления ПБД 410 ВСН. В этом варианте осуществления ПБД 410 ВСН включает в себя часть 510 преамбулы и часть 516 сообщения. Часть 510 преамбулы включает в себя часть 512 маякового пилот-сигнала и часть 514 пилот-сигнала МВхМВых. Часть 512 содержит маяковый пилот-сигнал и имеет фиксированную длительность ТСР=8 мкс. Часть 514 содержит пилот-сигнал МВхМВых и имеет фиксированную длительность ТМР=32 мкс. Часть 516 содержит сообщение ВСН и имеет фиксированную длительность ТВМ=40 мкс. Длительность ПБД ВСН фиксирована на ТСР + ТМР + ТВМ = 80 мкс.
Преамбула может использоваться для передачи одного или более типов пилот-сигнала и (или) иной информации. Маяковый пилот-сигнал содержит конкретный набор символов модуляции, который передается всеми передающими антеннами. Пилот-сигнал МВхМВых содержит конкретный набор символов модуляции, который передается всеми передающими антеннами с различными ортогональными кодами, которые затем позволяют приемникам восстанавливать пилот-сигнал, переданный каждой антенной. Различные наборы символов модуляции могут использоваться для маякового пилот-сигнала и пилот-сигнала МВхМВых. Генерирование маякового пилот-сигнала и пилот-сигнала МВхМВых более подробно описано ниже.
Сообщение ВСН переносит информацию конфигурации системы. В Таблице 5 перечислены различные поля для примерного формата сообщения ВСН.
Сообщение ВСН
"1" = не послано сообщения поискового вызова
"1" = не послано широковещат. сообщения
"1" = не послано уведомления RACH
Значение счетчика кадров может использоваться для синхронизации различных процессов в пункте доступа и пользовательских терминалах (например, пилот-сигнал, коды скремблирования, покрывающие коды и т.д.). Счетчик кадров может быть реализован в виде 4-битового счетчика, который считает циклически. Этот счетчик получает приращение в начале каждого кадра ДВР, и значение счетчика включается в поле счетчика кадров. Поле Сетевой ИД указывает идентификатор (ИД) сети, которой принадлежит пункт доступа. Поле ИД ПД указывает ИД пункта доступа в сетевом ИД. Поля Ур Прм ПД и Ур Прм ПД указывают максимальный уровень мощности передачи и желательный уровень мощности приема в пункте доступа, соответственно. Желательный уровень мощности приема может использоваться пользовательским терминалом для определения начальной мощности передачи восходящей линии.
Поля Длина FCCH, Длина FCH и Длина RCH указывают длины сегментов FCCH, FCH и RCH, соответственно, для текущего кадра ДВР. Длины этих сегментов задаются в единицах символов МОРЧ. Длительность символа МОРЧ для ВСН установлена как 4,0 мкс. Длительность символа МОРЧ для всех остальных транспортных каналов (т.е. FCCH, FCH, RACH и RCH) является переменной и зависит от выбранного циклического префикса, который определяется полем Длительность циклического префикса. Поле скорости FCCH указывает скорость передачи, используемую для FCCH для текущего кадра ДВР.
Поле Длина RACH указывает длину сегмента RACH, которая задается в единицах интервалов RACH. Длительность каждого интервала RACH задается полем Размер интервала RACH в единицах символов МОРЧ. Поле Охранный интервал RACH указывает величину времени между последним интервалом RACH и началом сегмента ВСН для следующего кадра ДВР. Эти различные поля для RACH более подробно описаны ниже.
Бит поискового вызова и бит широковещательной передачи указывают, переданы ли в текущем кадре ДВР на FCH сообщения поискового вызова и широковещательные сообщения. Эти два бита могут устанавливаться независимо для каждого кадра ДВР. Бит уведомления RACH указывает, переданы ли по каналу FCCH в текущем кадре ДВР уведомления для ПБД, переданных по каналу RACH в предыдущих кадрах ДВР.
Поле CRC включает в себя значение CRC (циклического кода) для всего сообщения ВСН. Это значение CRC может использоваться пользовательскими терминалами для определения, декодировано ли сообщение ВСН конкретным образом (т.е. хорошо) или с ошибкой (т.е. стерто). Поле Завершающие биты включает в себя группу нулей, используемых для сброса сверточного кодера в известное состояние в конце сообщения ВСН.
Как показано в Таблице 5, сообщение ВСН включает в себя в целом 120 битов. Эти 120 битов могут передаваться символами МОРЧ с использованием обработки, более подробно описанной ниже.
Таблица 5 показывает конкретный вариант осуществления формата для сообщения ВСН. Могут также определяться и использоваться иные форматы сообщения ВСН с меньшим числом полей, дополнительными и (или) другими полями, и это входит в объем изобретения.
2. Прямой канал управления (FCCH) - нисходящая линия
В варианте осуществления пункт доступа способен выделять ресурсы для FCH (прямого канала) и RCH (обратного канала) на покадровой основе. FCCH используется пунктом доступа для передачи распределения ресурсов для FCH и RCH (т.е. назначения каналов).
Фиг.5В иллюстрирует вариант осуществления ПБД 420 FCCH. В этом варианте осуществления ПБД FCCH включает в себя только часть 520 для сообщения FCCH. Сообщение FCCH имеет переменную длительность, которая может меняться от кадра к кадру в зависимости от величины информации планирования, переносимой по каналу FCCH для этого кадра. Длительность сообщения FCCH равна четному числу символов МОРЧ и задается полем Длина FCCH в сообщении ВСН. Длительность сообщений, переданных с использованием режима разнесения (например, сообщений ВСН и FCCH) задается в четном числе символов МОРЧ, потому что режим разнесения передает символы МОРЧ парами, как описано ниже.
В варианте осуществления FCCH может передаваться с использованием четырех возможных скоростей передачи. Конкретная скорость передачи, используемая для ПБД FCCH в каждом кадре ДВР, указывается полем PHY Режим FCCH сообщении ВСН. Каждая скорость передачи FCCH соответствует конкретной кодовой скорости и конкретной схеме модуляции и ассоциируется далее с конкретным режимом передачи, как показано в Таблице 26.
Сообщение FCCH может включать в себя ноль, один или множество информационных элементов (ИЭ) (IE). Каждый информационный элемент может быть ассоциирован с конкретным пользовательским терминалом и может использоваться для обеспечения информации, указывающей назначение ресурсов FCH/RCH для этого пользовательского терминала. Таблица 6 перечисляет различные поля для примерного формата сообщения FCCH.
Сообщение FCCH
Поле N_ИЭ указывает число информационных элементов, включенных в сообщение FCCH, посланное в текущем кадре ДВР. Для каждого информационного элемента (ИЭ) (IE), включенного в сообщение FCCH, поле Тип ИЭ указывает конкретный тип этого ИЭ. Число типов ИЭ определяется для использования, чтобы выделять ресурсы для разных типов передач, как описано ниже.
Поле ИД УДС идентифицирует конкретный пользовательский терминал, для которого предназначен информационный элемент. Каждый пользовательский терминал регистрируется пунктом доступа в начале сеанса связи, и пункт доступа назначает ему уникальный ИД УДС. Этот ИД УДС используется, чтобы идентифицировать пользовательский терминал в процессе сеанса.
Поля управления используются для передачи информации назначения каналов для пользовательского терминала и более подробно описаны ниже. Поле битов заполнения указывает достаточное число заполняющих битов, чтобы общая длина сообщения FCCH была равна четному числу символов МОРЧ. Поле CRC FCCH включает в себя значение CRC, которое может быть использовано пользовательскими терминалами, чтобы определить, декодировано ли сообщение FCCH правильно или с ошибкой. Поле завершающих битов включает в себя нули для сброса сверточного кодера в известное состояние в конце сообщения FCCH. Некоторые из этих полей более подробно описаны ниже.
Ряд режимов передачи поддерживается системой БЛВС МВхМВых для FCH и RCH, как указано в Таблице 1. Кроме того, пользовательский терминал может быть активным или находится в режиме ожидания в процессе соединения. Таким образом, ряд типов ИЭ определены для использования при распределении ресурсов FCH/RCH для различных типов передач. В Таблице 7 перечислен примерный набор типов ИЭ.
Типы ИЭ FCCH
Для типов ИЭ 0, 1 и 4 ресурсы выделяются конкретному пользовательскому терминалу как для FCH, так и для RCH (т.е. в паре каналов). Для ИЭ типа 2 минимальные ресурсы выделяются пользовательскому терминалу в каналах FCH и RCH, чтобы сохранять обновленную оценку линии. Примерный формат для каждого типа ИЭ описан ниже. В общем случае, скорости передачи и длительности для FCH и RCH могут быть назначены пользовательским терминалам независимо.
А. Типы ИЭ 0, 4 - Режим разнесения - управления лучом
Типы ИЭ 0 и 4 используются для выделения ресурсов FCH/RCH для режимов разнесения и управления лучом, соответственно. Для услуг с фиксированными низкими скоростями (к примеру, речевых) скорость передачи остается фиксированной в продолжение вызова. Для услуг с переменными скоростями передачи скорость передачи может выбираться независимо для FCH и RCH. ИЭ FCCH указывает местоположение ПБД в FCH и RCH, назначенных пользовательскому терминалу. В Таблице 8 перечислены различные поля примерного информационного элемента типа 0 и 4 ИЭ.
Тип 0 и 4 ИЭ FCCH
Поля Сдвиг FCH и RCH указывают временной сдвиг от начала текущего кадра ДВР для инициирования ПБД каналов FCH и RCH, соответственно, назначенных информационным элементом. Поля Скорость FCH и RCH указывают скорости передачи для FCH и RCH, соответственно.
Поля Тип преамбулы FCH и RCH указывают размер преамбулы в ПБД для FCH и RCH, соответственно. В Таблице 9 перечислены значения для полей Тип преамбулы FCH и RCH и связанные с ними размеры преамбулы.
Тип преамбулы
Поле Регулировка синхронизации RCH включает в себя два бита, используемых для регулировки синхронизации передачи восходящей линии от пользовательского терминала, идентифицированного полем ИД УДС. Эта регулировка синхронизации используется для снижения помех в структуре основанных на ДВР кадров (таких как один, показанный на фиг.3А), когда передачи нисходящей и восходящей линий являются дуплексными с временным разделением. В Таблице 10 перечислены значения для поля Регулировка синхронизации RCH и ассоциированные с ними действия.
Регулировка синхронизации RCH
Поле Управление мощностью RCH включает в себя два бита, используемые для регулировки мощности передачи в передаче восходящей линии от идентифицированного пользовательского терминала. Это управление мощностью используется для снижения помех в восходящей линии. В Таблице 11 перечислены значения для поля Управление мощностью RCH и ассоциированные с ними действия.
Управление мощностью RCH
Назначение каналов для идентифицированного пользовательского терминала может быть обеспечено различными путями. В варианте осуществления пользовательскому терминалу назначаются ресурсы FCH/RCH только для текущего кадра ДВР. В другом варианте осуществления ресурсы FCH/RCH назначаются терминалу для каждого кадра ДВР до тех пор, пока не произойдет отмена. В еще одном варианте осуществления ресурсы FCH/RCH назначаются пользовательскому терминалу для каждого  -го кадра ДВР, что упоминается как планирование с децимацией (прореживанием) кадров ДВР. Различные типы назначения могут указываться полем Тип назначения в информационном элементе FCCH.
-го кадра ДВР, что упоминается как планирование с децимацией (прореживанием) кадров ДВР. Различные типы назначения могут указываться полем Тип назначения в информационном элементе FCCH.
В. Тип ИЭ 1 - Режим пространственного мультиплексирования
Тип ИЭ 1 используется для выделения ресурсов FCH/RCH пользовательским терминалам с использованием режима пространственного мультиплексирования. Скорость передачи для этих пользовательских терминалов является переменной и может выбираться независимо для FCH и RCH. Таблица 12 перечисляет различные поля примерного информационного элемента Типа ИЭ 1.
Тип ИЭ 1 FCCH
Для типа ИЭ 1 скорость передачи для каждого пространственного канала может выбираться независимо на FCH и RCH. Интерпретация скоростей передачи для режима пространственного мультиплексирования состоит, в общем, в том, что она может определять скорость передачи на пространственный канал (например, для пространственных каналов числом до четырех в варианте осуществления, показанном в Таблице 12). Скорость передачи задается как приходящаяся на собственную моду, если передатчик выполняет пространственную обработку для передачи данных на собственных модах. Скорость передачи задается на антенну, если передатчик просто передает данные передающими антеннами, а приемник выполняет пространственную обработку, чтобы выделить и восстановить данные (для режима пространственного мультиплексирования без управления лучом).
Информационный элемент включает в себя скорости передачи для всех разрешенных пространственных каналов и нули - для не разрешенных. Пользовательские терминалы с менее, чем четырьмя передающими антеннами устанавливают неиспользуемые поля Скорости пространственных каналов FCH/RCH в нуль. Поскольку пункт доступа снабжен четырьмя передающими/приемными антеннами, пользовательские терминалы с более чем четырьмя передающими антеннами могут использовать их для передачи независимых потоков данных числом до четырех.
С. Тип ИЭ 2 - Дежурный режим
Тип ИЭ 2 используется для обеспечения информации управления для пользовательских терминалов, действующих в состоянии Дежурного режима (описанного ниже). В варианте осуществления, когда пользовательский терминал находится в состоянии Дежурного режима, управляющие векторы, используемые пунктом доступа и пользовательским терминалом для пространственной обработки, непрерывно обновляются так, что передача данных может начинаться быстро, когда она возобновляется. В Таблице 13 перечислены различные поля примерного информационного элемента типа ИЭ 2.
Тип ИЭ 2 FCCH
D. Тип ИЭ 3 - Быстрое уведомление RACH
Тип ИЭ 3 используется, чтобы обеспечить быстрое уведомление для пользовательских терминалов, пытающихся получить доступ к системе через RACH. Чтобы получить доступ к системе или послать короткое сообщение к пункту доступа, пользовательский терминал может передавать ПБД RACH по восходящей линии. После того, как пользовательский терминал посылает ПБД RACH, он отслеживает ВСН, чтобы найти, установлен ли бит уведомления RACH. Этот бит устанавливается пунктом доступа, если какой-либо пользовательский терминал успешно получил доступ к системе, и уведомление посылается для, по меньшей мере, одного пользовательского терминала на FCCH. Если этот бит установлен, то пользовательский терминал обрабатывает FCCH для уведомления, посланного на FCCH. Информационные элементы типа ИЭ 3 посылаются, если пункт доступа желает уведомить, что он правильно декодировал ПБД RACH от пользовательских терминалов без назначения ресурсов. Таблица 14 перечисляет разные поля примерного информационного элемента типа ИЭ 3.
Тип ИЭ 3 FCCH
Единственный или множество типов уведомления могут определяться и посылаться на FCCH. К примеру, могут быть определены быстрое уведомление и основанное на назначении уведомление. Быстрое уведомление может использоваться, чтобы просто уведомить, что ПБД RACH принят пунктом доступа, но что пользовательскому терминалу не назначены никакие ресурсы FCH/RCH. Основанное на назначении уведомление включает в себя назначения для FCH и (или) RCH для текущего кадра ДВР.
FCCH может воплощаться другими способами и может также передаваться различными путями. В одном варианте осуществления FCCH передается на единственной скорости передачи, которая сигнализируется в сообщении ВСН. Эта скорость может выбираться, например, на основании самого низкого отношения сигнал/шум-и-помеха (С/Ш) (SNR) всех пользовательских терминалов, для которых в текущем кадре ДВР посылается FCCH. Разные скорости передачи могут использоваться для различных кадров ДВР, в зависимости от условий канала принимающих пользовательских терминалов в каждом кадре ДВР.
В другом варианте осуществления FCCH воплощается со множеством (к примеру, четырьмя) подканалов FCCH. Каждый подканал FCCH передается на отличной скорости и ассоциируется с отличным требуемым С/Ш для восстановления этого подканала. Подканалы FCCH передаются по порядку от наинизшей скорости к наивысшей скорости передачи. Каждый подканал FCCH может передаваться или не передаваться в заданном кадре ДВР. Первый подканал FCCH (с наинизшей скоростью передачи) передается первым и может приниматься всеми пользовательскими терминалами. Этот подканал FCCH указывает, будет ли передаваться в текущем кадре ДВР каждый из остальных подканалов FCCH. Каждый пользовательский терминал может обрабатывать переданные подканалы FCCH, чтобы получить свой информационный элемент FCCH. Каждый пользовательский терминал может завершить обработку FCCH, если происходит следующее: (1) отказ декодировать текущий подканал FCCH, (2) прием своего информационного элемента FCCH в текущем подканале FCCH или (3) все переданные подканалы FCCH обработаны. Пользовательский терминал может завершать обработку FCCH, как только он сталкивается с отказом декодировать FCCH, потому что подканалы FCCH передаются с нарастающими скоростями передачи, и маловероятно, чтобы пользовательский терминал смог декодировать последующие подканалы FCCH, переданные на более высоких скоростях передачи.
3. Канал случайного доступа (RACH) - восходящая линия
RACH используется пользовательскими терминалами для получения доступа к системе и передачи коротких сообщений к пункту доступа. Работа RACH базируется на сегментированном протоколе случайного доступа Aloha, который описан ниже.
Фиг.5С иллюстрирует вариант осуществления ПБД 450 RACH. В этом варианте осуществления ПБД RACH включает в себя часть 552 преамбулы и часть 554 сообщения. Часть 552 преамбулы может использоваться для передачи управляемого эталона (т.е. управляемый пилот-сигнал), если пользовательский терминал снабжен множеством антенн. Управляемый эталон является пилот-сигналом, состоящим из набора символов модуляции, который подвергается пространственной обработке перед передачей по восходящей линии. Пространственная обработка позволяет пилот-сигналу передаваться на конкретной собственной моде канала МВхМВых. Обработка для управляемого эталона более подробно описана ниже. Часть 552 преамбулы имеет фиксированную длительность из, по меньшей мере, 2 символов МОРЧ. Часть 554 сообщения несет сообщение RACH и имеет переменную длительность. Длительность ПБД RACH является, таким образом, переменной.
В варианте осуществления для RACH поддерживаются четыре различных скорости передачи. Конкретная скорость, используемая для каждого сообщения RACH, указывается двухбитовым индикатором скорости данных (ИСД) (DRI) RACH, который встраивается в часть преамбулы ПБД RACH, как показано на фиг.5С. В варианте осуществления для RACH также поддерживаются четыре различных размера сообщения. Размер сообщения RACH указывается полем Длительность сообщения, включенным в сообщение RACH. Каждая скорость передачи RACH поддерживает 1, 2, 3 или 4 размера сообщения. В Таблице 15 перечислены четыре скорости передачи RACH, связанные с ними параметры кодирования и модуляции и размеры сообщения, поддерживаемые этими скоростями RACH.
Сообщение RACH содержит короткие сообщения и запросы доступа от пользовательского терминала. В таблице 16 перечислены различные поля примерного формата сообщения RACH и размер каждого поля для каждого из четырех различных размеров сообщения.
Поле Длительность сообщения указывает размер сообщения RACH. Поле Тип ПБД МАС указывает тип сообщения RACH. Поле ИД УДС содержит ИД УДС, который единственным образом идентифицирует пользовательский терминал, посылающий сообщение RACH. Во время начального доступа к системе уникальный ИД УДС не назначен пользовательскому терминалу. В этом случае, регистрация ИД УДС (к примеру, конкретное значение, зарезервированное для целей регистрации) может быть включена в поле ИД УДС. Поле ИД интервала указывает управляющий интервал RACH, на котором был послан ПБД RACH (синхронизация и передача RACH описывается ниже). Поле Полезная нагрузка включает в себя информационные биты для сообщения RACH. Поле CRC содержит значение CRC для сообщения RACH, а поле Завершающие биты используется для сброса сверточного кодера для RACH. Работа RACH совместно с ВСН и FCCH для доступа к системе более подробно описана ниже.
RACH также может быть реализован как "быстрый" RACH (F-RACH) и "медленный" RACH (S-RACH). F-RACH и S-RACH могут быть спроектированы для эффективной поддержки пользовательских терминалов в различных рабочих состояниях. Например, F-RACH может использоваться пользовательскими терминалами, которые (1) зарегистрированы системой, (2) могут компенсировать их задержки из-за подтверждения приема (ЗПП) (RTD) путем необходимого смещения вперед синхронизации их передач и (3) достигли требуемого С/Ш для работы на F-RACH. S-RACH может использоваться пользовательскими терминалами, которые не могут по каким-либо причинам использовать F-RACH.
Для F-RACH и S-RACH могут быть использованы различные решения для облегчения быстрого доступа к системе в любое время и минимизации количества ресурсов системы, необходимых для реализации случайного доступа. Например, F-RACH может использовать более короткий ПБД, применять более слабую схему кодирования, требовать, чтобы ПБД поступали приблизительно согласованными по времени в пункт доступа, и использовать сегментированную схему случайного доступа Aloha. S-RACH может использовать более длинный ПБД, применять более сильную схему кодирования, позволять ПБД S-RACH поступать в пункт доступа не совмещенными во времени, и использовать несегментированную схему случайного доступа Aloha.
Для простоты, нижеследующее описание предполагает, что для системы БЛВС МВхМВых используется единственный канал RACH.
4. Прямой канал (FCH) - нисходящая линия
FCH используется пунктом доступа, чтобы передавать специфичные пользовательские данные конкретному пользовательскому терминалу и сообщения поискового вызова/широковещательные сообщения множеству пользовательских терминалов. FCH может также использоваться для передачи пилот-сигнала к пользовательским терминалам. FCH может выделяться на покадровой основе. Обеспечивается ряд типов ПБД FCH с учетом различных применений канала FCH. В Таблице 17 перечислен набор типов ПБД FCH.
Типы ПБД FCH
Тип 0 ПБД FCH используется для передачи поисковые/широковещательные сообщения и пользовательские сообщения/пакеты на FCH и включает в себя только сообщения/пакеты. (Данные для конкретного пользовательского терминала могут быть посланы в качестве сообщения или пакета, и эти два термина используются здесь взаимозаменяемым образом). Тип 1 ПБД FCH используется для передачи пользовательских пакетов и включает в себя преамбулу. Тип 2 ПБД FCH включает в себя только преамбулу и не имеет сообщения/пакета, и связан с трафиком FCH в состоянии Ожидания.
Фиг.5D иллюстрирует вариант осуществления ПБД 430а FCH для Типа 0 ПБД FCH. В данном варианте осуществления ПБД 430а FCH включает в себя только часть 534а сообщения для поискового/широковещательного сообщения или пользовательского пакета. Сообщение/пакет могут иметь переменную длину, которая задается полем Длина сообщения FCH в ПБД FCH. Длина сообщения задается целым числом кадров PHY (описанных ниже). Скорость и режим передачи для сообщения поискового вызова/широковещательного сообщения определены и описаны ниже. Скорость и режим передачи для пользовательского пакета определены в ассоциированном информационном элементе канала FCCH.
Фиг.5Е иллюстрирует вариант осуществления ПБД 430b FCH для Типа 1 ПБД FCH. В этом варианте осуществления ПБД 430b FCH включает в себя часть 532b преамбулы и часть 534b сообщения/пакета. Часть 532b преамбулы используется для передачи пилот-сигнала МВхМВых или управляемого эталона и имеет переменную длину, которая определяется полем Тип преамбулы FCH в ассоциированном информационном элементе канала FCCH. Часть 534b используется для передачи пакета FCH и также имеет переменную длину (в целом числе кадров PHY), которая определяется полем Длина сообщения FCH в ПБД FCH. Пакет FCH передается с использованием скорости и режима передачи, определяемых ассоциированым информационным элементом канала FCCH.
Фиг.5F иллюстрирует вариант осуществления ПБД 430с FCH для Типа 2 ПБД FCH. В этом варианте осуществления ПБД 430с FCH включает в себя только часть 532с преамбулы и не имеет части сообщения. Длина части преамбулы указывается посредством ИЭ FCCH. Тип 2 ПБД FCH может использоваться для обеспечения возможности пользовательскому терминалу обновлять свою оценку канала в состоянии Ожидание.
Предусмотрено несколько типов сообщения FCCH с учетом различных использований канала FCH. В Таблице 18 перечислен примерный набор типов сообщений FCH.
Типы сообщений FCH
Сообщение поискового вызова может использоваться для поискового вызова множества пользовательских терминалов и передается с использованием Типа 0 ПБД FCH. Если Бит поискового вызова в сообщении ВСН установлен, то один или более ПБД с сообщениями поискового вызова (или "ПБД поискового вызова") передаются сначала по каналу FCH. В одном и том же кадре может быть послано множество ПБД поискового вызова, которые передаются с использованием режима разнесения и самой низкой скорости передачи 0,25 бит в сек/Гц, чтобы увеличить вероятность правильного приема пользовательскими терминалами.
Широковещательное сообщение может использоваться для передачи информации ко множеству пользовательских терминалов, и передается с использованием Типа 0 ПБД FCH. Если Бит широковещательной передачи в сообщении ВСН установлен, то один или более ПБД FCH с широковещательными сообщениями (или "широковещательные ПБД") посылаются по каналу FCH сразу вслед за ПБД поискового вызова, переданными по каналу FCH. Широковещательные ПБД также передаются с использованием режима разнесения и самой низкой скорости передачи 0,25 бит в сек/Гц, чтобы увеличить вероятность правильного приема.
Пользовательский пакет может использоваться для передачи конкретных пользовательских данных, и может передаваться с использованием Типа 1 или 2 ПБД FCH. Тип 1 или 2 ПБД FCH передаются по каналу FCH вслед за любыми ПБД поискового вызова и широковещательными ПБД, переданными по каналу FCH. Каждый пользовательский ПБД может передаваться с использованием режима разнесения, управления лучом или пространственного мультиплексирования. Информационные элементы FCCH определяют скорость и режим передачи, используемые для каждого пользовательского ПБД, переданного по каналу FCH.
Сообщение или пакет, переданные по каналу FCH, содержат целое число кадров PHY. В варианте осуществления и как описано ниже, каждый кадр PHY может включать в себя значение CRC для проверки отдельных кадров PHY в ПБД FCH и при необходимости для передачи их повторно. Для синхронных услуг может применяться RLP для сегментации, повторной передачи и повторной сборки кадров PHY в заданном ПБД FCH. В другом варианте осуществления значение CRC обеспечивается для каждого сообщения или пакета вместо каждого кадра PHY.
Фиг.6 иллюстрирует вариант осуществления структуры для пакета 534 FCH. Пакет FCH содержит целое число кадров 610 PHY. Каждый кадр PHY включает в себя поле 622 полезной нагрузки, поле 624 CRC и поле 626 завершающих битов. Первый кадр PHY для пакета FCH включает в себя поле 620 заголовка, которое указывает тип и длительность сообщения. Последний кадр PHY в пакете FCH включает в себя поле 628 пустого бита, которое содержит нулевые биты заполнения в конце полезной нагрузки для заполнения последнего кадра PHY. В варианте осуществления каждый кадр PHY содержит 6 символов МОРЧ. Число битов, включенных в каждый кадр PHY, зависит от скорости передачи, используемой для этого кадра FCH.
В Таблице 19 перечислены различные поля для примерного формата ПБД FCH для Типов 0 и 1 ПБД FCH.
Формат ПБД FCH
Поля Тип сообщения FCH и Длина сообщения FCH передаются в заголовке первого кадра PHY в ПБД FCH. Поля полезной нагрузки, CRC и завершающих битов включаются в каждый кадр PHY. Часть полезной нагрузки каждого ПБД FCH содержит информационные биты для сообщения поискового вызова/широковещательного сообщения или конкретного пользовательского пакета. Пустые биты используются для заполнения последнего кадра PHY в ПБД FCH, если требуется.
Кадр PHY может быть также определен для включения иного числа символов МОРЧ (например, одного, двух, четырех, восьми и т.д.). Кадр PHY может быть определен четным числом символов МОРЧ, потому что символы МОРЧ передаются парами в режиме разнесения, что можно использовать для FCH и RCH. Размер кадра PHY может выбираться на основании ожидаемого трафика для повышения эффективности. В частности, если размер кадра слишком велик, то снижение эффективности обуславливается использованием большого кадра PHY для передачи малого объема данных. Альтернативно, если размер кадра слишком мал, то служебная информация представляет бóльшую часть кадра.
5. Обратный канал (RCH) - восходящая линия
RCH используется пользовательскими терминалами для передачи данных восходящей линии и пилот-сигнал к пункту доступа. RCH может выделяться на каждый кадр ДВР. Один или более пользовательских терминалов могут назначаться для передачи по каналу RCH в любом заданном кадре ДВР. Предусмотрено несколько типов ПБД RCH, с учетом различных рабочих режимов в канале RCH. В Таблице 20 перечислен примерный набор типов ПБД RCH.
Типы ПБД RCH
Тип 0 ПБД RCH используется для передачи сообщения/пакета по каналу RCH и не включает в себя преамбулу. Тип 1 ПБД RCH используется для передачи сообщения/пакета и включает в себя преамбулу. Тип 2 ПБД RCH включает в себя преамбулу и короткое сообщение и связан с трафиком канала RCH в состоянии Ожидания.
Фиг.5D иллюстрирует вариант осуществления ПБД RCH для Типа 0 ПБД RCH. В этом варианте осуществления ПБД RCH включает в себя только часть 534а сообщения для пакета RCH переменной длины с заданным целым числом кадров PHY полем Длина сообщения RCH в ПБД RCH. Скорость и режим передачи для пакета RCH определены в ассоциированном информационном элементе канала FCCH.
Фиг.5Е иллюстрирует вариант осуществления ПБД RCH для Типа 1 ПБД RCH. В этом варианте осуществления ПБД RCH включает в себя часть 532b преамбулы и пакетную часть 534b. Часть 532b преамбулы используется для передачи эталона (к примеру, пилот-сигнала МВхМВых или управляемого эталона) и имеет переменную длину, которая определяется полем Тип преамбулы RCH в ассоциированном информационном элементе канала FCCH. Часть 534b используется для передачи пакета RCH и тоже имеет переменную длину, которая определяется полем Длина сообщения RCH в ПБД RCH. Пакет RCH передается с использованием скорости и режима передачи, определенного в ассоциированном информационном элементе канала FCCH.
Фиг.5G иллюстрирует вариант осуществления ПБД 350d RCH для Типа 2 ПБД RCH. В этом варианте осуществления ПБД RCH включает в себя часть 532d преамбулы и часть 536d сообщения. Часть 532d преамбулы используется для передачи эталона, и имеет длину 1, 4 или 8 символов МОРЧ. Часть 536d используется для передачи короткого сообщения RCH, и имеет фиксированную длину в один символ МОРЧ. Короткое сообщение RCH передается с использованием конкретных скорости и режима передачи (например, скорость 1/2 или скорость 1/4 и модуляция ДФМн).
Пакет, переданный по каналу RCH, (для Типов 0 и 1 ПБД) содержит целое число кадров PHY. Структура для пакета RCH (для Типов 0 и 1 ПБД) показана на фиг.6 и является той же самой, что и для пакета FCH. Пакет RCH содержит целое число кадров 610 PHY. Каждый кадр PHY включает в себя поле 622 полезной нагрузки, факультативное поле 624 CRC и поле 626 завершающих битов. Первый кадр PHY в пакете RCH включает в себя поле 620 заголовка, а последний кадр PHY в пакете включает в себя поле 628 пустых битов.
В Таблице 21 перечислены различные поля для примерного формата ПБД RCH для Типов 0 и 1 ПБД RCH.
Формат ПБД RCH (Типы 0 и 1 ПБД)
Поля Тип сообщения RCH, Длина сообщения RCH и Индикатор скорости FCH передаются в заголовке первого кадра PHY в ПБД RCH. Поле Индикатор скорости FCH используется для передачи информации скорости FCH (к примеру, максимальные скорости передачи, поддерживаемые каждым из пространственных каналов) к пункту доступа.
В Таблице 22 перечислены различные поля для примерного формата ПБД RCH для Типа 2 ПБД RCH.
Сообщение RCH для Типа 2 ПБД RCH
Поле Запрос RCH используется пользовательским терминалом для запроса дополнительной пропускной способности в восходящей линии. Это короткое сообщение RCH не включает в себя CRC и передается в единственном символе МОРЧ.
6. Активность выделенного канала
Передача данных по каналам FCH и RCH может происходить независимо. В зависимости от режимов передачи, выбранных для использования FCH и RCH, один или множество пространственных каналов (для режимов управления лучом и разнесения) могут быть активными и использоваться для передачи данных для каждого выделенного транспортного канала. Каждый пространственный канал может быть связан с конкретной скоростью передачи.
Когда только FCH или только RCH имеет все четыре скорости передачи, установленных на нуль, пользовательский терминал находится в состоянии ожидания на этой линии. Терминал в состоянии ожидания все же передает ПБД Ожидания по каналу RCH. Когда и FCH, и RCH имеют все четыре скорости передачи, установленные на нуль, то как пункт доступа, так и пользовательский терминал выключены и не осуществляет передачи. Пользовательские терминалы с менее, чем четырьмя передающими антеннами, устанавливают поля неиспользуемых скоростей передачи на нуль. Пользовательские терминалы с более, чем четырьмя передающими антеннами, используют не более четырех пространственных каналов для передачи данных. Таблица 23 показывает состояние передачи и активность канала, когда скорости передачи во всех четырех пространственных каналах каждого из FCH или RCH (или обоих) установлены на нуль.
Может также иметь место ситуация, когда и FCH, и RCH находятся в состоянии ожидания (т.е. не передают данные), но все же передают преамбулу. Это определяется как состояние Ожидания. Поля управления, используемые для поддержания пользовательского терминала в состоянии Ожидания, предусмотрены в информационном элементе Типа 2 ИЭ канала FCCH, который показан в Таблице 13.
7. Альтернативные схемы
Для ясности, для приведенной в качестве примера схемы описаны конкретные типы ПБД, структуры ПБД, форматы сообщений и т.д. Для использования также могут быть определены меньшее их количество, дополнительные и (или) различные типы, что также входит в объем изобретения.
III. Поддиапазонные структуры МОРЧ
В вышеприведенном описании одна и та же поддиапазонная структура МОРЧ используется для всех транспортных каналов. Улучшенная эффективность может быть достигнута путем использования различных поддиапазонных структур МОРЧ для различных транспортных каналов. Например, для некоторых транспортных каналов может использоваться 64-поддиапазонная структура, для других транспортных каналов может использоваться 256-поддиапазонная структура, и т.д. Кроме того, множество поддиапазонных структур МОРЧ может использоваться для заданного транспортного канала.
Для заданной ширины W полосы частот системы длительность символа МОРЧ зависит от полного числа поддиапазонов. Если полное число поддиапазонов равно N, то длительность каждого преобразованного символа (без циклического префикса) равна N/W мкс (если W задано в МГц). Циклический префикс добавляется к каждому преобразованному символу, чтобы образовать соответствующий символ МОРЧ. Длина циклического префикса определяется ожидаемым расширением задержки в системе. Циклический префикс представляет служебную информацию, которая необходима для каждого символа МОРЧ для обработки частотно-селективного канала. Эта служебная информация представляет бóльшую долю символа МОРЧ, если этот символ короткий, и меньшую долю, если символ длинный.
Поскольку различные транспортные каналы связаны с различными типами данных трафика, подходящая поддиапазонная структура МОРЧ может быть выбрана для использования для каждого транспортного канала, чтобы согласовать с ожидаемым типом данных трафика. Если ожидается, что будет передаваться большой объем данных в заданном транспортном канале, то может быть определена бóльшая поддиапазонная структура для использования для транспортного канала. В этом случае циклический префикс будет представлять меньшую долю символа МОРЧ, и можно достичь большей эффективности. Наоборот, если ожидается, что будет передаваться малый объем данных в заданном транспортном канале, то может быть определена меньшая поддиапазонная структура для использования для транспортного канала. В этом случае, даже если циклический префикс представляет бóльшую долю символа МОРЧ, бóльшая эффективность может быть все же достигнута снижением величины излишней пропускной способности путем использования символа МОРЧ меньшего размера. Символ МОРЧ может, таким образом, рассматриваться как "контейнер", который используется для передачи данных, причем "контейнер" должного размера может быть выбран для каждого транспортного канала в зависимости от объема данных, ожидаемых для передачи.
К примеру, для описанного выше варианта осуществления данные на FCH и RCH передаются в кадрах PHY, каждый из которых содержит 6 символов МОРЧ. В этом случае для использования для FCH и RCH может быть определена другая структура МОРЧ. Например, для FCH и RCH может быть определена 256-поддиапазонная структура. "Большой" символ МОРЧ для 256-поддипазонной структуры будет приблизительно в четыре раза длиннее "малого" символа МОРЧ для 64-поддиапазонной структуры, но будет иметь в четыре раза бóльшую способность переноса данных. Однако для одного большого символа МОРЧ необходим только один циклический префикс, тогда как для эквивалентных четырех малых символов МОРЧ необходимо четыре циклических префикса. Таким образом, объем служебной информации для циклических префиксов может быть снижен на 75% использованием большей 256-поддиапазонной структуры.
Эта концепция может быть расширена, чтобы для одного и того же транспортного канала можно было использовать различные поддиапазонные структуры МОРЧ. Например, RCH поддерживает различные типы ПБД, каждый из которых может быть ассоциирован с определенным размером. В этом случае бóльшая поддиапазонная структура может быть использована для типа ПБД RCH большего размера, и меньшая поддиапазонная структура может использоваться для типа ПБД RCH меньшего размера. Сочетание различных поддиапазонных структур может также использоваться для заданного ПБД. К примеру, если один длинный символ МОРЧ эквивалентен четырем коротким символам МОРЧ, то ПБД можно передаваться с использованием Nбольш больших символов МОРЧ и Nмал малых символов МОРЧ, где Nбольш ≥ 0 и 3 ≥ Nмал≥ 0.
Различные поддиапазонные структуры МОРЧ ассоциируются с символами МОРЧ различных длин. Таким образом, если различные поддиапазонные структуры МОРЧ используются для различных транспортных каналов (и (или) для одного и того же транспортного канала), то необходимо определить сдвиги FCH и RCH для ПБД FCH и RCH с надлежащим временным разрешением, которое меньше, чем период символа МОРЧ. В частности, приращение времени для ПБД FCH и RCH может быть задано в целых числах длины циклического префикса вместо периода символа МОРЧ.
IV. Скорости и режимы передачи
Транспортные каналы, описанные выше, используются для передачи различных типов данных для различных услуг и функций. Каждый транспортный канал может проектироваться для поддержки одной или более скоростей и одного или более режимов передачи.
1. Режимы передачи
Для транспортных каналов поддерживаются несколько режимов передачи. Каждый режим передачи ассоциируется с конкретной пространственной обработкой в передатчике и приемнике, как описано ниже. В таблице 24 перечислены режимы передачи, поддерживаемые каждым из транспортных каналов.
Для режима разнесения каждый символ данных передается с избыточностью посредством множества антенн, множества поддиапазонов, множества периодов символов или их сочетаний для реализации пространственного, частотного и (или) временного разнесения. Для режима управления лучом для передачи данных используется единственный пространственный канал (обычно наилучший пространственный канал), и каждый символ данных передается в единственном пространственном канале с использованием полной мощности передачи, доступной для передающих антенн. Для режима пространственного мультиплексирования множество пространственных каналов используются для передачи данных, и каждый символ данных передается на одном пространственном канале, причем пространственный канал может соответствовать собственной моде, передающей антенне и т.д. Режим управления лучом может рассматриваться как специальный случай режима пространственного мультиплексирования, причем для передачи данных используется только один пространственный канал.
Режим разнесения может использоваться для общих транспортных каналов (ВСН и FCCH) для нисходящей линии от пункта доступа к пользовательским терминалам. Режим разнесения может также использоваться для выделенных транспортных каналов (FCH и RCH). Использование режима разнесения в каналах FCH и RCH может быть согласовано при установлении вызова. Режим разнесения передает данные в одном "пространственном канале" с использованием пары антенн для каждого поддиапазона.
Режим управления лучом может применяться в канале RACH пользовательскими терминалами со множеством передающих антенн. Пользовательский терминал может оценивать канал МВхМВых на основании пилот-сигнала МВхМВых, посланного по каналу ВСН. Эта оценка канала может затем использоваться для выполнения управления лучом в канале RACH для обращений к системе. Режим управления лучом может также использоваться для выделенных транспортных каналов (FCH и RCH). Режим управления лучом может обеспечивать более высокое отношение принимаемого сигнала к шуму и помехам (С/Ш) в приемнике, чем режим разнесения, за счет использования усиления антенной решетки в передатчике. Помимо этого, часть преамбулы ПБД может быть снижена, поскольку управляемый эталон включает в себя только символы для единственной "управляемой" антенны. Режим разнесения также может использоваться для канала RACH.
Режим пространственного мультиплексирования может использоваться для каналов FCH и RCH, чтобы достичь более высокой пропускной способности, поддерживаемой канальными условиями. Режимы пространственного мультиплексирования и управления лучом являются управляемыми эталоном и требуют управления в замкнутом контуре для правильной работы. По существу, пользовательскому терминалу выделяются ресурсы как в FCH, так и в RCH, чтобы поддерживать режим пространственного мультиплексирования. В каналах FCH и RCH может поддерживаться до четырех пространственных каналов (ограничено числом антенн в пункте доступа).
2. Кодирование и модуляция
Ряд различных скоростей передачи поддерживаются для транспортных каналов. Каждая скорость ассоциируется с конкретной скоростью кодирования и конкретной схемой модуляции, что совместно проявляется в конкретной спектральной эффективности (или скорости передачи данных). Таблица 25 перечисляет различные скорости передачи, поддерживаемые системой.
Каждый общий транспортный канал поддерживает одну или более скоростей передачи и один режим передачи (или, возможно, более, как в случае канала RACH). ВСН передается на фиксированной скорости с использованием режима разнесения. FCCH может передаваться на одной из возможных скоростей, как указывается полем Режим Phy FCCH в сообщении ВСН, с использованием режима разнесения. В одном варианте осуществления RACH может передаваться на одной из возможных скоростей, как указывается ИСД RACH, встроенном в преамбулу ПБД RACH, и каждое сообщение RACH имеет один из четырех возможных размеров. В другом варианте осуществления RACH передается на единственной скорости. В Таблице 26 перечислены параметры кодирования, модуляции и передачи и размеры сообщений, поддерживаемые каждым транспортным каналом.
Параметры для общих транспортных каналов
Сообщение FCCH является переменным по размеру и задается четным числом символов МОРЧ.
FCH и RCH поддерживают все скорости, перечисленные в Таблице 25. В Таблице 27 перечислены параметры кодирования, модуляции и передачи и размеры сообщений, поддерживаемые FCH и RCH.
Параметры для FCH и RCH
Замечание А: каждый бит кода со скоростью 1/2 повторяется в двух поддиапазонах для получения эффективной кодовой скорости 1/4. Биты четности представляют избыточные биты, введенные кодированием, и используются приемником для исправления ошибок.
Размер кадра PHY в Таблице 27 указывает число кодовых битов, символов модуляции и символов МОРЧ для каждого кадра PHY. Если для передачи данных используется 48 поддиапазонов данных, то каждый символ МОРЧ включает в себя 48 символов модуляции. Для режимов разнесения и управления лучом передается один поток символов, и размер кадра PHY соответствует единственной скорости передачи, применяемой для этого потока символов. Для режима пространственного мультиплексирования множество потоков символов может передаваться в множестве пространственных каналов, и общий размер кадра PHY находится суммированием размеров кадров PHY для отдельных пространственных каналов. Размер кадра PHY для каждого пространственного канала определяется скоростью, используемой для этого пространственного канала.
В качестве примера предположим, что канал МВхМВых способен поддерживать четыре пространственных канала, работающих при спектральных эффективностях 0,5, 1,5, 4,5 и 5,5 бит в сек/Гц. Четыре скорости передачи, выбранные для четырех пространственных каналов, будут соответствовать показанным в Таблице 28.
Примерная передача с пространственным мультиплексированием
Общий размер кадра PHY составляет тогда 144+432+1296+1584=3456 информационных битов или 288+576+1728+2304=4896 кодовых битов. Даже хотя каждый из четырех пространственных каналов поддерживает различное число битов полезной нагрузки, общий кадр PHY может передаваться в 6 символах МОРЧ (к примеру, 24 мкс, предполагая по 4 мкс на символ МОРЧ).
V. Обработка физического уровня
Фиг.7 показывает блок-схему варианта осуществления пункта 110х доступа и двух пользовательских терминалов 120х и 120у с системой БЛВС МВхМВых.
В нисходящей линии связи в пункте 110х доступа передающий (ПРД) (ТХ) процессор 710 данных принимает данные трафика (т.е. информационные биты) от источника 708 данных и сигнализацию и иную информацию от контроллера 730 и, возможно, планировщика 734. Эти различные типы данных могут передаваться в разных транспортных каналах. ПРД процессор 710 данных "кадрирует" данные (если необходимо), скремблирует кадрированные/некадрированные данные, кодирует скремблированные данные, перемежает (т.е. переупорядочивает) кодированные данные и отображает перемеженные данные на символы модуляции. Для простоты термин "символ данных" относится к символу модуляции для данных трафика, а термин "пилотный символ" относится к символу модуляции для пилот-сигнала. Скремблирование рандомизирует биты данных. Кодирование увеличивает надежность передачи данных. Перемежение обеспечивает временное, частотное и (или) пространственное разнесение для кодовых битов. Скремблирование, кодирование и модуляция могут выполняться на основе управляющих сигналов, обеспечиваемых контроллером 730, и более подробно описаны ниже. ПРД процессор 710 данных обеспечивает поток символов модуляции для каждого пространственного канала, используемого для передачи данных.
ПРД пространственный процессор 720 принимает один или более потоков символов модуляции от ПРД процессора 710 данных и выполняет пространственную обработку символов модуляции для получения четырех потоков передаваемых символов, по одному потоку на каждую передающую антенну. Пространственная обработка более подробно описана ниже.
Каждый модулятор (МОД) (MOD) 722 принимает и обрабатывает соответствующий поток передаваемых символов, чтобы обеспечить соответствующий поток символов МОРЧ. Каждый поток символов МОРЧ обрабатывается далее, чтобы обеспечить соответствующий модулированный сигнал нисходящей линии. Четыре модулированных сигнала нисходящей линии от модулятора 722а-722d передаются затем четырьмя антеннами 724а-724d, соответственно.
В каждом пользовательском терминале 120 одна из множества антенн 752 принимает передаваемые модулированные сигналы нисходящей линии, и каждая приемная антенна подает принятый сигнал на соответствующий демодулятор (ДЕМОД) (DEMOD) 754. Каждый демодулятор 754 выполняет обработку, комплементарную обработке, выполняемой модулятором 722, и выдает принятые символы. Приемный (ПРМ) (RX) пространственный процессор 760 затем выполняет пространственную обработку принятых символов от всех демодуляторов 754 для получения восстановленных символов, которые являются оценками символов модуляции, переданных пунктом доступа.
ПРМ процессор 770 данных принимает и демультиплексирует восстановленные символы в их соответствующие транспортные каналы. Для восстановленных символов для каждого транспортного канала может осуществляться посимвольное обращенное отображение, обращенное перемежение, декодирование и дескремблирование для получения декодированных данных для этого транспортного канала. Декодированные данные для каждого транспортного канала могут включать в себя восстановленные пакетированные данные, сообщения, сигнализацию и т.д., которые подаются на приемник 772 данных и (или) контроллер 780 для дальнейшей обработки.
Обработка пунктом 110 доступа и терминалом 120 для нисходящей линии более подробно описана ниже. Обработка для восходящей линии может быть той же самой или отличной от обработки для нисходящей линии.
Для нисходящей линии в каждом активном пользовательском терминале 120 ПРМ пространственный процессор 760 оценивает нисходящую линию для получения информации состояния канала (ИСК) (CSI). ИСК может включать в себя оценки канальных откликов, отношения С/Ш для принятого сигнала и т.д. ПРМ процессор 770 данных может также обеспечивать статус пакета/кадра, принятого по нисходящей линии. Контроллер 780 принимает информацию состояния канала и статус пакета/кадра и определяет информацию обратной связи, подлежащую передаче назад в пункт доступа. Эта информация обратной связи обрабатывается ПРД процессором 790 данных и ПРД пространственным процессором 792 (если он имеется), преобразуется одним или более модуляторами 754 и передается одной или более антеннами 752 назад в пункт доступа.
В пункте 110 доступа переданный(-е) сигнал(ы) восходящей линии принимаются антеннами 724, демодулируются демодуляторами 722 и обрабатываются ПРМ пространственным процессором 740 и ПРМ процессором 742 данных комплементарным образом по отношению к тому, что выполнялось в пользовательском терминале. Восстановленная информация обратной связи подается затем на контроллер 730 и планировщик 734.
Планировщик 734 использует информацию обратной связи для выполнения ряда функций, таких как (1) выбор набора пользовательских терминалов для передачи данных по нисходящей и восходящей линии, (2) выбор скорости(-ей) и режима передачи для каждого выбранного пользовательского терминала и (3) назначение доступных ресурсов FCH/RCH для выбранных терминалов. Планировщик 734 и (или) контроллер 730 используют далее информацию (например, управления векторами), полученную из передачи восходящей линии для обработки передачи нисходящей линии, как более подробно опиано ниже.
Ряд режимов передачи поддерживается для передачи данных по нисходящей и восходящей линии. Обработка для каждого из этих режимов передачи более подробно описана ниже.
1. Режим разнесения - обработка передачи
Фиг.8А показывает блок-схему варианта осуществления передающего блока 800 для выполнения обработки передачи для режима разнесения. Передающий блок 800 может использоваться для передающей части пункта доступа и пользовательского терминала.
В ПРД процессоре 71-а данных блок 808 формирования кадров "кадрирует" данные для каждого пакета, подлежащего передаче по каналам FCH и RCH. Для остальных транспортных каналов кадрирование выполнять не нужно. Кадрирование может выполняться, как иллюстрируется на фиг.6, чтобы генерировать один или более кадров PHY для каждого пользовательского пакета. Скремблер 810 затем скремблирует кадрированные/некадрированные данные для каждого транспортного канала для рандомизации данных.
Кодер 812 принимает и кодирует скремблированные данные в соответствии с выбранной схемой кодирования, чтобы обеспечить кодовые биты. Блок 814 повторения/прореживания затем повторяет или прореживает (т.е. стирает) некоторые из кодовых битов, чтобы получить желательную кодовую скорость. В варианте осуществления кодер 812 является двоичным сверточным кодером со скоростью 1/2 и длиной ограничения 7. Кодовая скорость 1/4 может быть получена повторением каждого кодового бита один раз. Кодовые скорости больше, чем 1/2 могут быть получены стиранием некоторых из кодовых битов из кодера 812. Конкретная конструкция кадрирующего блока 808, скремблера 810, кодера 812 и блока 814 повторения/прореживания описана ниже.
Перемежитель 818 затем перемежает (т.е. переупорядочивает) кодовые биты из блока 814 на основании выбранной схемы перемежения. В варианте осуществления каждая группа из следующих друг за другом подлежащих передаче кодовых битов в заданном пространственном канале расширяется по 48 поддиапазонам передачи данных (или поддиапазонам данных), чтобы обеспечить разнесение по частоте. Перемежение более подробно описано ниже.
Блок 820 посимвольного отображения затем отображает перемеженные данные в соответствии с конкретной схемой модуляции для получения символов модуляции. Как показано в Таблице 26, для режима разнесения могут использоваться BPSK, 4 QAM или 16 QAM в зависимости от выбранной скорости передачи. В режиме разнесения одна и та же схема модуляции используется для всех поддиапазонов данных. Посимвольное отображение может достигаться (1) группированием наборов из В битов для формирования В-битовых значений, где В ≥ 1, и (2) отображением каждого В-битового значения для точки в группе сигналов, соответствующей выбранной схеме модуляции. Каждая отображенная сигнальная точка является комплексным значением и соответствует символу модуляции. Блок 820 посимвольного отображения обеспечивает поток символов модуляции к ПРД процессору 720а разнесения.
В варианте осуществления режим разнесения использует пространственно-временное разнесение передачи (ПВРП) (STTD) для двойного разнесения передачи по поддиапазонам. ПВРП поддерживает одновременную передачу независимых символьных потоков двумя передающими антеннами при поддержании ортогональности в приемнике.
Схема ПВРП работает следующим образом. Предположим, что два символа модуляции, обозначенные как  и
и  , подлежат передаче в заданном поддиапазоне. Передатчик генерирует два вектора
, подлежат передаче в заданном поддиапазоне. Передатчик генерирует два вектора  и
и  , где "
, где " " обозначает сопряженное значение, а "
" обозначает сопряженное значение, а " " означает транспонирование. Каждый вектор включает в себя два элемента, которые подлежат передаче двумя передающими антеннами в одном символьном периоде. (Т.е. вектор
" означает транспонирование. Каждый вектор включает в себя два элемента, которые подлежат передаче двумя передающими антеннами в одном символьном периоде. (Т.е. вектор  передается двумя антеннами в первый символьный период, а вектор
передается двумя антеннами в первый символьный период, а вектор  передается двумя антеннами в следующий символьный период).
передается двумя антеннами в следующий символьный период).
Если приемник снабжен единственной приемной антенной, то принятые символы могут быть выражены как:

где  и
и  являются двумя символами, принятыми в приемнике в двух следующих друг за другом символьных периодах;
являются двумя символами, принятыми в приемнике в двух следующих друг за другом символьных периодах;
 и
и  являются коэффициентами усиления трассы от двух передающих антенн к приемной антенне для рассматриваемого поддиапазона, причем усиления трассы предполагаются постоянными по поддиапазону и статическими по двухсимвольному периоду; и
являются коэффициентами усиления трассы от двух передающих антенн к приемной антенне для рассматриваемого поддиапазона, причем усиления трассы предполагаются постоянными по поддиапазону и статическими по двухсимвольному периоду; и
 и
и  являются шумами, связанными с двумя принятыми символами
являются шумами, связанными с двумя принятыми символами  и
и  , соответственно.
, соответственно.
Приемник может затем получить оценки двух переданных символов  и
и  следующим образом:
следующим образом:


Альтернативно, передатчик может генерировать два вектора  и
и  и передавать эти два вектора последовательно в двух символьных периодах двумя передающими антеннами. Принятые символы могут затем быть выражены как:
и передавать эти два вектора последовательно в двух символьных периодах двумя передающими антеннами. Принятые символы могут затем быть выражены как:
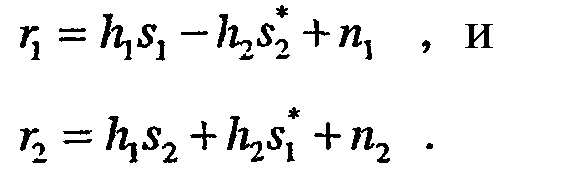
Приемник может затем получить оценки из двух переданных символов следующим образом:
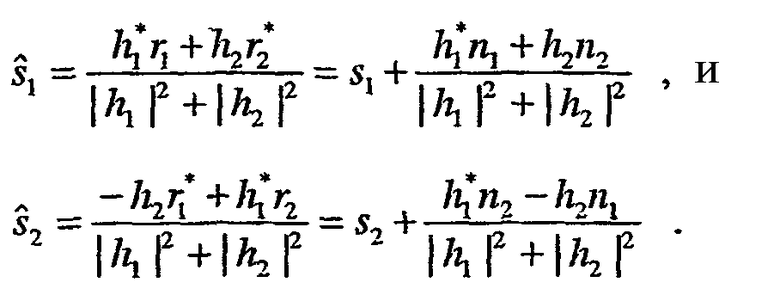
Вышеприведенное описание может быть расширено для системы БЛВС МВхМВых с двумя или более передающими антеннами, NR приемными антеннами и множеством поддиапазонов. Две передающих антенны используются для любого заданного поддиапазона. Предположим, что два символа модуляции, обозначенных как  и
и  , подлежат передаче на заданном поддиапазоне
, подлежат передаче на заданном поддиапазоне  . Передатчик генерирует два вектора
. Передатчик генерирует два вектора  и
и  , или, эквивалентно, два набора символов
, или, эквивалентно, два набора символов  и
и  . Каждый набор символов включает в себя два элемента, которые подлежат передаче последовательно в двух символьных периодах соответствующей передающей антенной в поддиапазоне
. Каждый набор символов включает в себя два элемента, которые подлежат передаче последовательно в двух символьных периодах соответствующей передающей антенной в поддиапазоне  (т.е. набор символов
(т.е. набор символов  передается в поддиапазоне
передается в поддиапазоне  из антенны
из антенны  в двух символьных периодах, а набор
в двух символьных периодах, а набор  символов передается в поддиапазоне антенной
символов передается в поддиапазоне антенной  в том же самом двухсимвольном периоде).
в том же самом двухсимвольном периоде).
Векторы принятых символов в приемных антеннах в двух символьных периодах могут быть выражены как:
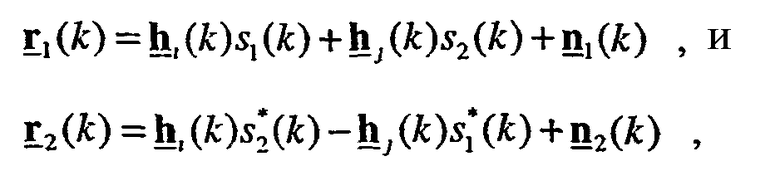
где  и
и  являются двумя символьными векторами, принятыми в двух следующих друг за другом символьных периодах на поддиапазоне
являются двумя символьными векторами, принятыми в двух следующих друг за другом символьных периодах на поддиапазоне  в приемнике, причем каждый вектор включает в себя
в приемнике, причем каждый вектор включает в себя  принятых символов для приемных антенн;
принятых символов для приемных антенн;
 и
и  являются векторами коэффициентов усиления трассы от двух передающих антенн
являются векторами коэффициентов усиления трассы от двух передающих антенн  и
и  к приемным антеннам для поддиапазона
к приемным антеннам для поддиапазона  , причем каждый вектор включает в себя усиления каналов от связанной с ним передающей антенны к каждой из
, причем каждый вектор включает в себя усиления каналов от связанной с ним передающей антенны к каждой из  приемных антенн, где усиления трассы предполагаются постоянными по поддиапазону и статическими за двухсимвольный период; и
приемных антенн, где усиления трассы предполагаются постоянными по поддиапазону и статическими за двухсимвольный период; и
 и
и  являются шумовыми векторами, связанными с двумя принятыми векторами
являются шумовыми векторами, связанными с двумя принятыми векторами  и
и  , соответственно.
, соответственно.
Приемник может затем выделить оценки двух переданных символов  и
и  следующим образом:
следующим образом:
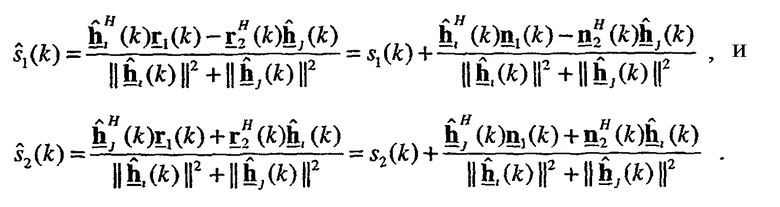
Альтернативно, передатчик может генерировать два набора  и
и  символов и передавать эти наборы символов двумя передающими антеннами
символов и передавать эти наборы символов двумя передающими антеннами  и
и  . Векторы принятых символов могут тогда быть выражены как:
. Векторы принятых символов могут тогда быть выражены как:
Приемник может затем выделить оценки двух переданных символов следующим образом:
Схема ПВРП описана в работе S.M. Alamouti "A Simple Transmit Diversity Technique for Wireless Communications" ("Простой метод разнесения передачи для беспроводной связи"), IEEE Journal on Selected Areas in Communications, Vol. 16, No. 8, October 1998, pp. 1451-1458. Схема ПВРП описывается также в патентной заявке США № 09/737.602 на "Способ и систему для повышения эффективности по ширине полосы в каналах со множеством входов и множеством выходов", поданной 5 января 2001, и в патентной заявке США № 10/179.439 на "Режимы передачи с разнесением для систем связи МВхМВых МОРЧ"), поданной 24 июня 2002.
Схема ПВРП эффективно передает один символ модуляции на поддиапазон двумя передающими антеннами в каждом символьном периоде. Однако эта схема ПВРП распределяет информацию в каждом символе модуляции по двум следующим друг за другом символам МОРЧ. Таким образом, восстановление символа в приемнике выполняется на основании двух следующих друг за другом принятых символов МОРЧ.
Схема ПВРП использует одну пару передающих антенн для каждого поддиапазона данных. Поскольку пункт доступа включает в себя четыре передающих антенны, каждая антенна может выбираться для использования для половины из 48 поддиапазонов данных. В Таблице 29 перечислены примерные схемы назначения поддиапазонов-антенн для схемы ПВРП.
Как показано в Таблице 29, передающие антенны 1 и 2 используются для поддиапазонов с индексами -26, -19, -13 и т.д., передающие антенны 2 и 4 используются для поддиапазонов с индексами -25, -18, -12 и т.д., передающие антенны 1 и 3 используются для поддиапазонов с индексами -24, -17, -11 и т.д. Имеется шесть разных антенных пар для четырех передающих антенн. Каждая из шести антенных пар используется для 8 поддиапазонов, которые распределены приблизительно равномерно по 48 поддиапазонам данных. Пары антенн назначаются для поддиапазонов так, что различные антенны используются в смежных поддиапазонах, что может обеспечить большее частотное и пространственное разнесение. Например, антенны 1 и 2 используются для поддиапазона -26, а антенны 3 и 4 используются для поддиапазона -25.
Назначение поддиапазонов-антенн в Таблице 29 таково, что четыре передающих антенны используются для каждого кодового бита для наинизшей скорости передачи 1/4, что может максимизировать пространственное разнесение. Для скорости 1/4 каждый кодовый бит повторяется и предается в двух поддиапазонах (что также называется кодированием с двойным повторением поддиапазонов). Два поддиапазона, используемые для каждого кодового бита, отображаются в разные антенные пары, чтобы все четыре антенны использовались для передачи этого кодового бита. К примеру, битовые индексы 0 и 1 в Таблице 29 соответствуют одному и тому же кодовому биту для режима разнесения, где бит с индексом 0 передается антеннами 1 и 2 в поддиапазоне -26, а бит с индексом 1 передается антеннами 3 и 4 в поддиапазоне 1. В качестве другого примера, битовые индексы 2 и 3 в Таблице 29 соответствуют одному и тому же кодовому биту, где бит с индексом 2 передается антеннами 1 и 3 в поддиапазоне -17, а бит с индексом 3 передается антеннами 2 и 4 в поддиапазоне 10.
Система может поддерживать другие схемы разнесения передачи, и это входит в объем изобретения. Например, система может поддерживать пространственно-частотное разнесение передачи (ПЧРП) (SFTD), которое может обеспечивать пространственное и частотное разнесение на основе пар поддиапазонов. Примерная схема ПЧРП работает следующим образом. Предположим, что два символа модуляции, обозначенные как  и
и  , генерируются и отображаются на два смежных поддиапазона символа МОРЧ. Для ПЧРП передатчик будет передавать символы
, генерируются и отображаются на два смежных поддиапазона символа МОРЧ. Для ПЧРП передатчик будет передавать символы  и
и  двумя антеннами в поддиапазоне
двумя антеннами в поддиапазоне  и будет передавать символы
и будет передавать символы  и
и  теми же самыми двумя антеннами в поддиапазоне
теми же самыми двумя антеннами в поддиапазоне  . Смежные поддиапазоны используются для пары символов модуляции, потому что канальный отклик предполагается постоянным для передачи этих двух пар символов. Обработка в приемнике для восстановления символов модуляции является той же самой, что и для схемы ПВРП за исключением того, что обрабатываются принятые символы для двух поддиапазонов вместо двух символьных периодов МОРЧ.
. Смежные поддиапазоны используются для пары символов модуляции, потому что канальный отклик предполагается постоянным для передачи этих двух пар символов. Обработка в приемнике для восстановления символов модуляции является той же самой, что и для схемы ПВРП за исключением того, что обрабатываются принятые символы для двух поддиапазонов вместо двух символьных периодов МОРЧ.
Фиг.8В показывает блок-схему варианта осуществления ПРД процессора 720а разнесения, реализующего схему ПВРП для режима разнесения.
В ПРД процессоре 720а разнесения демультиплексор 832 принимает и демультиплексирует поток символов  модуляции из ПРД процессора 710а данных в 48 подпотоков, обозначенных как
модуляции из ПРД процессора 710а данных в 48 подпотоков, обозначенных как  -
-  , для 48 поддиапазонов данных. Каждый поток символов модуляции для каждого символьного периода включает в себя один символ модуляции, который соответствует скорости передачи символов (ТМОРЧ)-1, где ТМОРЧ представляет собой длительность одного символа МОРЧ. Каждый поток символов модуляции подается на соответствующий ПРД процессор 840 поддиапазонного разнесения.
, для 48 поддиапазонов данных. Каждый поток символов модуляции для каждого символьного периода включает в себя один символ модуляции, который соответствует скорости передачи символов (ТМОРЧ)-1, где ТМОРЧ представляет собой длительность одного символа МОРЧ. Каждый поток символов модуляции подается на соответствующий ПРД процессор 840 поддиапазонного разнесения.
В каждом ПРД процессоре 840 поддиапазонного разнесения демультиплексор 842 демультиплексирует символы демодуляции для поддиапазона в две символьных последовательности, причем каждая последовательность имеет скорость передачи символов (2ТМОРЧ)-1. Пространственно-временной кодер принимает две последовательности символов модуляции и для каждого двухсимвольного периода использует два символа  и
и  в двух последовательностях, чтобы сформировать два символьных набора
в двух последовательностях, чтобы сформировать два символьных набора  и
и  для двух передающих антенн. Каждый набор символов включает в себя два символа, по одному символу от каждой из двух последовательностей. Набор
для двух передающих антенн. Каждый набор символов включает в себя два символа, по одному символу от каждой из двух последовательностей. Набор  символов генерируется путем обеспечения символа
символов генерируется путем обеспечения символа  первым, а символа
первым, а символа  следующим, где
следующим, где  получается через переключатель 856а, а
получается через переключатель 856а, а  получается взятием сопряженной величины от
получается взятием сопряженной величины от  блоком 852а и задержкой сопряженного символа на один символьный период блоком 854а задержки. Аналогично, набор
блоком 852а и задержкой сопряженного символа на один символьный период блоком 854а задержки. Аналогично, набор  символов генерируется путем обеспечения символа
символов генерируется путем обеспечения символа  первым, а символа
первым, а символа  следующим, где
следующим, где  получается посредством переключателя 856b, а
получается посредством переключателя 856b, а  получается взятием отрицательной сопряженной величины от
получается взятием отрицательной сопряженной величины от  блоком 852b и задержкой отрицательного сопряженного символа на один символьный период блоком 854b задержки. Два набора
блоком 852b и задержкой отрицательного сопряженного символа на один символьный период блоком 854b задержки. Два набора  и
и  символов подлежат передаче двумя антеннами
символов подлежат передаче двумя антеннами  и
и  , назначенными поддиапазону, как указывается в Таблице 29. Пространственно-временной кодер 850 обеспечивает первый набор
, назначенными поддиапазону, как указывается в Таблице 29. Пространственно-временной кодер 850 обеспечивает первый набор  символов в буфер/мультиплексор 870 для первой передающей антенны
символов в буфер/мультиплексор 870 для первой передающей антенны  , а второй набор
, а второй набор  символов в другой буфер/мультиплексор 870 для второй передающей антенны
символов в другой буфер/мультиплексор 870 для второй передающей антенны  . Два символа, обеспеченные пространственно-временным кодером 850 для каждого символьного периода, называются символами ПВРП.
. Два символа, обеспеченные пространственно-временным кодером 850 для каждого символьного периода, называются символами ПВРП.
Буферы/мультиплексоры 870а-870d используются для буферизации и мультиплексирования символов ПВРП от всех процессоров 840 разнесения. Каждый буфер/мультиплексор 870 принимает пилотные символы и символы ПВРП от соответствующих ПРД процессоров 840 поддиапазонного разнесения, как определяется Таблицей 29. Например, буфер/мультиплексор 870а принимает символы модуляции для поддиапазонов -26, -24, -22, -19 и т.д. (т.е. всех поддиапазонов, отображенных в антенну 1), буфер/мультиплексор 870b принимает символы модуляции для поддиапазонов -26, -23, -20, -19 и т.д. (т.е. всех поддиапазонов, отображенных в антенну 2), буфер/мультиплексор 870с принимает символы модуляции для поддиапазонов -25, -24, -20, -18 и т.д. (т.е. всех поддиапазонов, отображенных в антенну 3), а буфер/мультиплексор 870d принимает символы модуляции для поддиапазонов -25, -23, -22, -18 и т.д. (т.е. всех поддиапазонов, отображенных в антенну 4).
Каждый буфер/мультиплексор 870 затем, для каждого символьного периода, мультиплексирует четыре пилот-сигнала, 24 символа ПВРП и 36 нулей для четырех пилотных поддиапазонов, 24 поддиапазона данных и 36 неиспользуемых поддиапазонов, соответственно для формирования последовательности из 64 передаваемых символов для всех 64 поддиапазонов. Хотя имеется 48 поддиапазонов, только 24 поддиапазона используются для каждой передающей антенны для режима разнесения, и эффективное полное число неиспользованных поддиапазонов для каждой антенны будет, таким образом, 36 вместо 12. Каждый переданный символ является комплексным значением (которое может быть нулем для неиспользуемого поддиапазона), которое посылается в одном поддиапазоне в одном символьном периоде. Каждый буфер/мультиплексор 870 подает поток символов  для одной передающей антенны. Каждый поток символов передачи содержит конкатенированные последовательности из 64 символов передачи, по одной последовательности для каждого символьного периода. Согласно фиг.8А, ПРД процессор 720а разнесения обеспечивает четыре потока передаваемых символов,
для одной передающей антенны. Каждый поток символов передачи содержит конкатенированные последовательности из 64 символов передачи, по одной последовательности для каждого символьного периода. Согласно фиг.8А, ПРД процессор 720а разнесения обеспечивает четыре потока передаваемых символов,  , для четырех модуляторов 722а-722d МОРЧ.
, для четырех модуляторов 722а-722d МОРЧ.
Фиг.8С показывает блок-схему варианта осуществления модулятора 722х МОРЧ, который может использоваться для каждого из модуляторов 722а-722d МОРЧ на фиг.8А. В модуляторе 722х блок 852 обратного быстрого преобразования Фурье принимает поток передаваемых символов  и преобразует каждую последовательность из 64 передаваемых символов в ее представление во временной области (которое называется преобразованным символом) с использованием 64-точечного обратного быстрого преобразования Фурье. Каждый преобразованный символ содержит 64 отсчета во временной области, соответствующих 64 полным поддиапазонам.
и преобразует каждую последовательность из 64 передаваемых символов в ее представление во временной области (которое называется преобразованным символом) с использованием 64-точечного обратного быстрого преобразования Фурье. Каждый преобразованный символ содержит 64 отсчета во временной области, соответствующих 64 полным поддиапазонам.
Для каждого преобразованного символа генератор 854 циклического префикса повторяет часть преобразованного символа для формирования соответствующего символа МОРЧ. Как отмечено выше, может использоваться одна из двух различных длин циклического префикса. Циклический префикс для ВСН фиксирован и равен 800 нс. Циклический префикс для всех остальных транспортных каналов может выбираться (либо 400 нс, либо 800 нс) и указывается полем Длительность циклического префикса в сообщении ВСН. Для системы с шириной полосы 20 МГц, периодом дискретизации 50 нс и 64 поддиапазонами каждый преобразованный символ имеет длительность либо 3,6 мс, либо 4,0 мс в зависимости от того, используется ли для символа МОРЧ циклический признак длиной 400 нс или 800 нс.
Фиг.8D иллюстрирует символ МОРЧ. Символ МОРЧ состоит из двух частей: циклического префикса, имеющего длительность 400 или 800 нс (8 или 16 отсчетов), и преобразованного символа с длительностью 3,2 мс (64 отсчета). Циклический префикс является копией последних 8 или 16 отсчетов (т.е. циклическим продолжением) преобразованного символа и вводится перед преобразованным символом. Циклический префикс гарантирует, что символ МОРЧ сохраняет свое свойство ортогональности при наличии разброса многолучевой задержки, благодаря чему улучшается функционирование при вредных эффектах трассы, таких как многолучеве распространение и дисперсия каналов, вызванные частотно-селективными замираниями.
Генератор 854 циклического префикса подает поток символов МОРЧ к передатчику 856 (ПРДК) (TMTR). Передатчик 856 преобразует поток символов МОРЧ в один или более аналоговых сигналов и затем усиливает, фильтрует и преобразует с повышением частоты аналоговые сигналы для формирования модулированного сигнала, пригодного для передачи соответствующей антенной.
Сигнал базовой полосы для символа МОРЧ может быть выражен как:

где  обозначает символьный период (т.е. индекс символа МОРЧ);
обозначает символьный период (т.е. индекс символа МОРЧ);
 обозначает индекс поддиапазона;
обозначает индекс поддиапазона;
 является числом поддиапазонов пилот-сигнала и данных;
является числом поддиапазонов пилот-сигнала и данных;
 обозначает символ, переданный на поддиапазоне символьного периода
обозначает символ, переданный на поддиапазоне символьного периода  ; и
; и

где  является длительностью циклического префикса;
является длительностью циклического префикса;
 есть длительность символа МОРЧ; и
есть длительность символа МОРЧ; и
 есть ширина полосы частот каждого поддиапазона.
есть ширина полосы частот каждого поддиапазона.
2. Режим пространственного мультиплексирования - обработка передачи
Фиг.9А показывает блок-схему передающего блока 900, обеспечивающего обработку передачи для режима пространственного мультиплексирования. Блок 900 передачи представляет собой другой вариант осуществления передающей части пункта доступа и пользовательского терминала. Для режима пространственного мультиплексирования вновь предположим, что доступны четыре передающих антенны и четыре приемных антенны, данные могут передаваться в пространственных каналах числом до четырех. Для каждого пространственного канала может использоваться отличающаяся скорость передачи в зависимости от пропускной способности передачи. Каждая скорость передачи может ассоциироваться с конкретной кодовой скоростью и схемой модуляции, как показано в Таблице 25. В нижеследующем описании предполагается, что  пространственных каналов выбираются для использования для передачи данных, где
пространственных каналов выбираются для использования для передачи данных, где  ≤
≤ ≤min{
≤min{ ,
,  }.
}.
В ПРД процессоре 710b данных блок 808 формирования кадров кадрирует данные для каждого пакета FCH/RCH для генерации одного или более кадров PHY для пакета. Каждый кадр PHY включает в себя несколько битов данных, которые могут передаваться во всех пространственных каналах в 6 символах МОРЧ. Скремблер 810 скремблирует данные для каждого транспортного канала. Кодер 812 принимает и кодирует скремблированные данные в соответствии с выбранной схемой кодирования для получения кодовых битов. В варианте осуществления используется общая кодирующая схема, чтобы кодировать данные для всех  пространственных каналов, а разные кодовые скорости для разных каналов получаются прореживанием кодовых битов разными прореживающими шаблонами. Блок 814 прореживания тем самым прореживает кодовые биты, чтобы получить желательную кодовую скорость для каждого пространственного канала. Прореживание для режима пространственного мультиплексирования более подробно описано ниже.
пространственных каналов, а разные кодовые скорости для разных каналов получаются прореживанием кодовых битов разными прореживающими шаблонами. Блок 814 прореживания тем самым прореживает кодовые биты, чтобы получить желательную кодовую скорость для каждого пространственного канала. Прореживание для режима пространственного мультиплексирования более подробно описано ниже.
Демультиплексор 816 принимает и демультиплексирует кодовые биты из блока 814 прореживания для получения  потоков кодовых битов для пространственных каналов, выбранных для использования. Каждый поток кодовых битов подается на соответствующий перемежитель 818, который перемежает кодовые биты в потоке по 48 поддиапазонам данных. Кодирование и перемежение для режима пространственного мультиплексирования более подробно описано ниже. Перемеженные данные из каждого перемежителя 818 подаются на соответствующий блок 820 посимвольного отображения.
потоков кодовых битов для пространственных каналов, выбранных для использования. Каждый поток кодовых битов подается на соответствующий перемежитель 818, который перемежает кодовые биты в потоке по 48 поддиапазонам данных. Кодирование и перемежение для режима пространственного мультиплексирования более подробно описано ниже. Перемеженные данные из каждого перемежителя 818 подаются на соответствующий блок 820 посимвольного отображения.
В режиме пространственного мультиплексирования для четырех пространственных каналов может использоваться до четырех разных скоростей передачи в зависимости от отношения С/Ш для принятого сигнала, полученного для этих пространственных каналов. Каждая скорость ассоциируется с конкретной схемой модуляции, как показано в Таблице 25. Каждый блок 820 посимвольного отображения отображает перемеженные данные в соответствии с конкретной схемой модуляции, выбранной для ассоциированного пространственного канала, чтобы получить символы модуляции. Если все четыре пространственных канала выбраны для использования, то блоки 820а-820d посимвольного отображения обеспечивают четыре потока символов модуляции для четырех пространственных каналов к ПРД пространственному процессору 720b.
ПРД пространственный процессор 720b выполняет пространственную обработку для режима пространственного мультиплексирования. Для простоты, нижеследующее описание предполагает, что для передачи данных используются четыре передающих антенны, четыре приемных антенны и 48 поддиапазонов данных. Индексы поддиапазонов данных задаются набором  , где
, где  =±{1, …, 6, 8, …, 20, 22, …, 26} для описанной выше структуры поддиапазонов МОРЧ.
=±{1, …, 6, 8, …, 20, 22, …, 26} для описанной выше структуры поддиапазонов МОРЧ.
Модель для системы МВхМВых-МОРЧ может быть выражена как:

где  является "принятым" вектором с четырьмя составляющими для символов, принятых четырьмя приемными антеннами для поддиапазона
является "принятым" вектором с четырьмя составляющими для символов, принятых четырьмя приемными антеннами для поддиапазона  (т.е.
(т.е.  );
);
 является "переданным" вектором четырьмя составляющими для четырех символов, переданных четырьмя передающими антеннами для поддиапазона
является "переданным" вектором четырьмя составляющими для четырех символов, переданных четырьмя передающими антеннами для поддиапазона  (т.е.
(т.е.  );
);
 - матрица канальных откликов размером (
- матрица канальных откликов размером ( ×
× ) для поддиапазона
) для поддиапазона  ; и
; и
 - вектор аддитивного белого Гауссовского шума (АБГШ) (AWGN) для поддиапазона
- вектор аддитивного белого Гауссовского шума (АБГШ) (AWGN) для поддиапазона  .
.
Предполагается, что шумовой вектор  имеет компоненты с нулевым средним и ковариационной матрицей
имеет компоненты с нулевым средним и ковариационной матрицей  , где
, где  - единичная матрица, σ2 - дисперсия шума.
- единичная матрица, σ2 - дисперсия шума.
Матрица  канальных откликов для поддиапазона
канальных откликов для поддиапазона  может быть выражена как:
может быть выражена как:

где составляющая  , для
, для  ∈{1,2,3,4} и
∈{1,2,3,4} и  ∈{1,2,3,4}, представляет собой связь (т.е. комплексное усиление) между передающей антенной
∈{1,2,3,4}, представляет собой связь (т.е. комплексное усиление) между передающей антенной  и приемной антенной
и приемной антенной  для поддиапазона
для поддиапазона  . Для простоты, предполагается, что матрицы
. Для простоты, предполагается, что матрицы  канальных откликов для
канальных откликов для  ∈
∈ известны или могут быть установлены как передатчиком, так и приемником.
известны или могут быть установлены как передатчиком, так и приемником.
Матрица  канальных откликов для каждого поддиапазона может быть сделана "диагональной" для получения для этого поддиапазона
канальных откликов для каждого поддиапазона может быть сделана "диагональной" для получения для этого поддиапазона  собственных мод. Этого можно достичь путем выполнения декомпозиции по собственным значениям корреляционной матрицы от
собственных мод. Этого можно достичь путем выполнения декомпозиции по собственным значениям корреляционной матрицы от  , определяемой соотношением
, определяемой соотношением  , где
, где  обозначает сопряженную транспозицию от
обозначает сопряженную транспозицию от  . Декомпозиция по собственным значениям корреляционной матрицы
. Декомпозиция по собственным значениям корреляционной матрицы  может быть выражена как:
может быть выражена как:

где  является единичной матрицей размером (
является единичной матрицей размером ( ×
× ), столбцы которой представляют собой собственные значения
), столбцы которой представляют собой собственные значения  (т.е.
(т.е.  , где каждое
, где каждое  является собственным вектором для одной собственной моды); и
является собственным вектором для одной собственной моды); и
 является диагональной матрицей размером (
является диагональной матрицей размером ( ×
× ) собственных значений
) собственных значений  .
.
Единичная матрица характеризуется свойством  . Собственные векторы
. Собственные векторы  для
для  ∈{1,2,3,4} называются также векторами управления передачей для каждого из пространственных каналов.
∈{1,2,3,4} называются также векторами управления передачей для каждого из пространственных каналов.
Матрица  канальных откликов может быть также преобразована в диагональную с использованием декомпозиции по сингулярным значениям, что может быть выражено как:
канальных откликов может быть также преобразована в диагональную с использованием декомпозиции по сингулярным значениям, что может быть выражено как:

где  является матрицей, столбцы которой представляют собой правые собственные векторы
является матрицей, столбцы которой представляют собой правые собственные векторы  ;
;
 является диагональной матрицей, содержащей сингулярные значения
является диагональной матрицей, содержащей сингулярные значения  , которые являются положительными корнями квадратными диагональных элементов
, которые являются положительными корнями квадратными диагональных элементов  , собственных значений
, собственных значений  ; и
; и
 представляет собой матрицу, столбцы которой являются левыми собственными векторами
представляет собой матрицу, столбцы которой являются левыми собственными векторами  .
.
Декомпозиция по сингулярных значениям описана в книге Gilbert Strang "Linear Algebra and Its Applications" ("Линейная алгебра и ее применения"), Second Edition, Academic Press, 1980. Как показано в уравнениях (7) и (8), столбцы матрицы  являются собственными векторами
являются собственными векторами  , а также правыми собственными векторами . Столбцы матрицы
, а также правыми собственными векторами . Столбцы матрицы  являются собственными векторами
являются собственными векторами  , а также левыми собственными векторами .
, а также левыми собственными векторами .
Диагональная матрица  для каждого поддиапазона содержит неотрицательные действительные значения вдоль диагонали и нули в остальных позициях. Собственные значения обозначаются как
для каждого поддиапазона содержит неотрицательные действительные значения вдоль диагонали и нули в остальных позициях. Собственные значения обозначаются как  или
или  для
для  ∈{1,2,3,4}.
∈{1,2,3,4}.
Декомпозиция по собственным значениям может выполняться независимо для матрицы  канальных откликов для каждого из 48 поддиапазонов данных, чтобы найти четыре собственных моды для этого поддиапазона (в предположении, что каждая матрица
канальных откликов для каждого из 48 поддиапазонов данных, чтобы найти четыре собственных моды для этого поддиапазона (в предположении, что каждая матрица  является полноранговой). Четыре собственных значения для каждой диагональной матрицы
является полноранговой). Четыре собственных значения для каждой диагональной матрицы  можно упорядочить так, что
можно упорядочить так, что  , где
, где  является наибольшим собственным значением, а
является наибольшим собственным значением, а  является наименьшим собственным значением для поддиапазона
является наименьшим собственным значением для поддиапазона  . Когда собственные значения для каждой диагональной матрицы
. Когда собственные значения для каждой диагональной матрицы  упорядочены, собственные векторы (или столбцы) связанной матрицы
упорядочены, собственные векторы (или столбцы) связанной матрицы  также упорядочены соответственно.
также упорядочены соответственно.
"Широкополосная" собственная мода может быть определена как набор собственных мод одинакового порядка всех поддиапазонов после упорядочения (т.е. широкополосная собственная мода  включает в себя собственные моды
включает в себя собственные моды  всех поддиапазонов). Каждая широкополосная собственная мода ассоциируется с соответствующим набором собственных векторов для всех поддиапазонов. "Главная" широкополосная собственная мода ассоциируется с наибольшим сингулярным значением в каждой из матриц
всех поддиапазонов). Каждая широкополосная собственная мода ассоциируется с соответствующим набором собственных векторов для всех поддиапазонов. "Главная" широкополосная собственная мода ассоциируется с наибольшим сингулярным значением в каждой из матриц  после упорядочения.
после упорядочения.
Затем можно сформировать вектор  для включения в него собственного значения
для включения в него собственного значения  -го ранга для всех 48 поддиапазонов данных. Этот вектор
-го ранга для всех 48 поддиапазонов данных. Этот вектор  может быть выражен как:
может быть выражен как:

Вектор  включает в себя собственные значения для наилучшей или главной широкополосной собственной моды. Для системы МВхМВых-МОРЧ с четырьмя передающими антеннами и четырьмя приемными антеннами (т.е. система 4×4) имеется до четырех широкополосных собственных мод.
включает в себя собственные значения для наилучшей или главной широкополосной собственной моды. Для системы МВхМВых-МОРЧ с четырьмя передающими антеннами и четырьмя приемными антеннами (т.е. система 4×4) имеется до четырех широкополосных собственных мод.
Если дисперсия σ2 шума в приемнике постоянна по рабочей полосе и известна в передатчике, то отношение С/Ш в принятом сигнале для каждого поддиапазона каждой широкополосной собственной моды можно найти делением собственного значения  на дисперсию σ2 шума. Для простоты, можно предположить, что дисперсия шума равна единице (т.е. σ2=1).
на дисперсию σ2 шума. Для простоты, можно предположить, что дисперсия шума равна единице (т.е. σ2=1).
Для режима пространственного мультиплексирования полная мощность  передачи, доступная для передатчика, может быть найдена для широкополосных мод на основе различных схем распределения мощности. В одной схеме полная мощность передачи равномерно распределяется по всем четырем широкополосным собственным модам, так что
передачи, доступная для передатчика, может быть найдена для широкополосных мод на основе различных схем распределения мощности. В одной схеме полная мощность передачи равномерно распределяется по всем четырем широкополосным собственным модам, так что  =/4, где представляет собой мощность, выделенную для широкополосной собственной моды
=/4, где представляет собой мощность, выделенную для широкополосной собственной моды  . В другой схеме полная мощность передачи распределяется по четырем широкополосным собственным модам с помощью процедуры "разбавления" (создания избытка информации).
. В другой схеме полная мощность передачи распределяется по четырем широкополосным собственным модам с помощью процедуры "разбавления" (создания избытка информации).
Процедура разбавления распределяет мощность так, что широкополосные собственные моды с более высокими усиления мощности получают бóльшие части полной мощности передачи. Величина мощности передачи, выделенной заданной широкополосной собственной моде, определяется ее отношением С/Ш в принятом сигнале, которое в свою очередь зависит от коэффициентов усиления мощности (или собственных значений) для всех поддиапазонов этой широкополосной собственной моды. Процедура разбавления может выделять нулевую мощность передачи широкополосным собственным модам с достаточно слабыми отношениями С/Ш. Процедура разбавления принимает  для четырех широкополосных собственных мод, где
для четырех широкополосных собственных мод, где  представляет собой коэффициент нормировки для широкополосной собственной моды
представляет собой коэффициент нормировки для широкополосной собственной моды  и может быть выражен как:
и может быть выражен как:

Коэффициент  нормировки поддерживает мощность передачи, выделенную широкополосной моде
нормировки поддерживает мощность передачи, выделенную широкополосной моде  , инвариантной после применения инверсии каналов, как описано ниже. Как показано в уравнении (10), коэффициент
, инвариантной после применения инверсии каналов, как описано ниже. Как показано в уравнении (10), коэффициент  нормировки может быть получен на основе собственных значений в векторе
нормировки может быть получен на основе собственных значений в векторе  и в предположении, что дисперсия шума равна единице (т.е. σ2=1).
и в предположении, что дисперсия шума равна единице (т.е. σ2=1).
Процедура разбавления затем определяет долю  полной мощности передачи для выделения каждой широкополосной собственной моде на основании набора
полной мощности передачи для выделения каждой широкополосной собственной моде на основании набора  так, что спектральная эффективность или какой-либо иной критерий оптимизируется. Мощность передачи, выделенная широкополосной собственной моде
так, что спектральная эффективность или какой-либо иной критерий оптимизируется. Мощность передачи, выделенная широкополосной собственной моде  процедурой разбавления может быть выражена как:
процедурой разбавления может быть выражена как:
 =
=
 , для
, для  = {1,2,3,4}. Уравнение (11)
= {1,2,3,4}. Уравнение (11)
Распределения мощности для четырех широкополосных собственных мод могут быть заданы посредством  , где
, где  =1 и
=1 и  =. Режим пространственного мультиплексирования может быть выбран для использования, если в наборе
=. Режим пространственного мультиплексирования может быть выбран для использования, если в наборе  более чем одно значение является ненулевым.
более чем одно значение является ненулевым.
Процедура разбавления известна в уровне техники и не описывается здесь (см., например, работу "Information Theory and Reliable Communication" ("Информационная теория и надежная связь") Robert G. Gallager, John Wiley and Sons, 1968, которая включена сюда посредством ссылки).
Для режима пространственного мультиплексирования скорость передачи каждого пространственного канала или широкополосной собственной моды может выбираться на основе отношения С/Ш в принятом сигнале, достигнутого этим пространственным каналом/широкополосной собственной модой с выделенной мощностью  передачи. Для простоты, нижеследующее описание предполагает передачу данных на широкополосных собственных модах. Отношение С/Ш в принятом сигнале для каждой широкополосной собственной моды может быть выражено как:
передачи. Для простоты, нижеследующее описание предполагает передачу данных на широкополосных собственных модах. Отношение С/Ш в принятом сигнале для каждой широкополосной собственной моды может быть выражено как:
 =
= , для
, для  ={1,2,3,4}. Уравнение (12)
={1,2,3,4}. Уравнение (12)
В одном варианте осуществления скорость передачи для каждой широкополосной собственной моды находится на основе таблицы, которая включает в себя скорости, поддерживаемые системой, и диапазон отношений С/Ш для каждой скорости передачи. Эта таблица может быть получена компьютерным моделированием, эмпирическими измерениями и т.д. Конкретная скорость передачи для использования для каждой широкополосной собственной моды представлена скоростью в таблице с диапазоном отношений С/Ш, покрывающим отношение С/Ш в принятом сигнале для широкополосной собственной моды. В другом варианте осуществления скорость передачи для каждой широкополосной собственной моды выбирается на основе (1) отношения С/Ш в принятом сигнале для широкополосной собственной моды, (2) сдвига С/Ш, используемого для расчета ошибки оценки, непостоянства в канале МВхМВых и других факторов, и (3) таблицы поддерживаемых скоростей и их требуемых С/Ш. Для этого варианта осуществления сначала вычисляется среднее принятое С/Ш для каждой широкополосной собственной моды, как описано выше, или в качестве среднего из принятых С/Ш (в единицах дБ) для всех поддиапазонов широкополосной собственной моды. В любом случае затем вычисляется рабочее С/Ш как сумма С/Ш в принятом сигнале и сдвига С/Ш (где оба заданы в дБ). Рабочее С/Ш сравнивается затем с требуемым С/Ш для каждой из скоростей, поддерживаемых системой. Для широкополосной собственной моды выбирается затем наивысшая скорость в таблице с требуемым С/Ш, которое меньше, чем или равно рабочему С/Ш. Скорость для режима разнесения передачи и режима управления лучом может также находиться аналогичным образом.
Мощность  передачи, выделенная для каждой широкополосной собственной моды может быть распределена по 48 поддиапазонам данных этой широкополосной собственной моды так, чтобы С/Ш в принятом сигнале для всех поддиапазонов были приблизительно равными. Это неравномерное распределение мощности по поддиапазонам называется инверсией каналов. Мощность
передачи, выделенная для каждой широкополосной собственной моды может быть распределена по 48 поддиапазонам данных этой широкополосной собственной моды так, чтобы С/Ш в принятом сигнале для всех поддиапазонов были приблизительно равными. Это неравномерное распределение мощности по поддиапазонам называется инверсией каналов. Мощность  передачи, выделенная каждому поддиапазону, может быть выражена как:
передачи, выделенная каждому поддиапазону, может быть выражена как:

где  задается в уравнении (10).
задается в уравнении (10).
Как показано в уравнении (13), мощность передачи распределяется неравномерно по поддиапазонам данных на основе их канальных коэффициентов усиления мощности, что задается собственными значениями  , для
, для  ∈
∈ . Распределение мощности таково, что приблизительно равные С/Ш в принятом сигнале достигаются в приемнике для всех поддиапазонов данных каждой широкополосной собственной моды. Эта инверсия каналов выполняется независимо для каждой из четырех широкополосных собственных мод. Инверсия каналов для широкополосной собственной моды более подробно описана в патентной заявке США № 10/229.209 на "Кодированные системы МВхМВых с выборочной инверсией каналов, применяемой для собственной моды", поданной 27 августа 2002.
. Распределение мощности таково, что приблизительно равные С/Ш в принятом сигнале достигаются в приемнике для всех поддиапазонов данных каждой широкополосной собственной моды. Эта инверсия каналов выполняется независимо для каждой из четырех широкополосных собственных мод. Инверсия каналов для широкополосной собственной моды более подробно описана в патентной заявке США № 10/229.209 на "Кодированные системы МВхМВых с выборочной инверсией каналов, применяемой для собственной моды", поданной 27 августа 2002.
Инверсия каналов может выполняться различными путями. Для полной инверсии каналов все поддиапазоны данных используются для передачи данных, если широкополосная собственная мода выбрана для использования. Для выборочной инверсии каналов все или поднабор доступных подканалов данных могут быть выбраны для использования для каждой широкополосной собственной моды. Выборочная инверсия каналов отбрасывает слабые поддиапазоны с отношением С/Ш для принятого сигнала ниже конкретного порога и выполняет инверсию каналов только на выбранных поддиапазонах. Выборочная инверсия каналов для каждой широкополосной собственной моды также описана в патентной заявке США № 10/229.209 на "Кодированные системы МВхМВых с выборочной инверсией каналов, применяемой для собственной моды"), поданной 27 августа 2002. Для простоты, нижеследующее описание предполагает, что полная инверсия каналов выполняется для каждой широкополосной собственной моды, выбранной для использования.
Усиление для использования для каждого поддиапазона каждой широкополосной собственной моды может быть найдено на основе мощности  передачи, выделенной этому поддиапазону. Усиление
передачи, выделенной этому поддиапазону. Усиление  для каждого поддиапазона данных может быть выражено как:
для каждого поддиапазона данных может быть выражено как:

Для каждого поддиапазона можно определить диагональную матрицу  усиления. Эта матрица включает в себя коэффициенты усиления для четырех собственных мод для поддиапазона
усиления. Эта матрица включает в себя коэффициенты усиления для четырех собственных мод для поддиапазона  вдоль диагонали и может быть выражена как:
вдоль диагонали и может быть выражена как:  .
.
Для режима пространственного мультиплексирования вектор  передачи для каждого поддиапазона может быть выражен как:
передачи для каждого поддиапазона может быть выражен как:
Вектор  включает в себя четыре символа модуляции, подлежащих передаче на четырех собственных модах для поддиапазона
включает в себя четыре символа модуляции, подлежащих передаче на четырех собственных модах для поддиапазона  , а вектор
, а вектор  включает в себя четыре символа передачи, подлежащие передаче четырьмя антеннами для поддиапазона
включает в себя четыре символа передачи, подлежащие передаче четырьмя антеннами для поддиапазона  . Для простоты, уравнение (15) не включает в себя коэффициенты коррекции, используемые для расчета различий между цепями передачи/приема в пункте доступа и пользовательском терминале, что более подробно описано ниже.
. Для простоты, уравнение (15) не включает в себя коэффициенты коррекции, используемые для расчета различий между цепями передачи/приема в пункте доступа и пользовательском терминале, что более подробно описано ниже.
Фиг.9В показывает блок-схему варианта осуществления ПРД пространственного процессора 720b, обеспечивающего выполнение пространственной обработки для режима пространственного мультиплексирования. Для простоты, нижеследующее описание предполагает, что все четыре широкополосных собственных моды выбираются для использования. Однако могут также выбираться для использования менее, чем четыре широкополосных собственных моды.
В процессоре 720b демультиплексор 932 принимает четыре потока символов модуляции (обозначенных как  -
-  ), подлежащих передаче на четырех широкополосных собственных модах, демультиплексирует каждый поток на 48 подпотоков для 48 поддиапазонов данных, и подает четыре подпотока символов модуляции для каждого поддиапазона данных к соответствующему ПРД поддиапазонному пространственному процессору 940. Каждый процессор 840 выполняет обработку, показанную в уравнении (15) для одного поддиапазона.
), подлежащих передаче на четырех широкополосных собственных модах, демультиплексирует каждый поток на 48 подпотоков для 48 поддиапазонов данных, и подает четыре подпотока символов модуляции для каждого поддиапазона данных к соответствующему ПРД поддиапазонному пространственному процессору 940. Каждый процессор 840 выполняет обработку, показанную в уравнении (15) для одного поддиапазона.
В каждом ПРД поддиапазонном пространственном процессоре 940 четыре подпотока символов модуляции (обозначенных как  -
-  ) подаются на четыре перемножителя 942а-942d, которые также принимают усиления
) подаются на четыре перемножителя 942а-942d, которые также принимают усиления  ,
,  ,
,  и
и  для четырех собственных мод ассоциированного поддиапазона. Каждый коэффициент
для четырех собственных мод ассоциированного поддиапазона. Каждый коэффициент  усиления может быть найден на основании мощности
усиления может быть найден на основании мощности  передачи, выделенной этому поддиапазону/собственной моде, как показано в уравнении (14). Каждый перемножитель 942 масштабирует свои символы модуляции их коэффициентами
передачи, выделенной этому поддиапазону/собственной моде, как показано в уравнении (14). Каждый перемножитель 942 масштабирует свои символы модуляции их коэффициентами  , чтобы обеспечить масштабированные символы модуляции. Перемножители 942а-942d подают четыре подпотока масштабированных символов модуляции на четыре формирователя 950а-950d луча, соответственно.
, чтобы обеспечить масштабированные символы модуляции. Перемножители 942а-942d подают четыре подпотока масштабированных символов модуляции на четыре формирователя 950а-950d луча, соответственно.
Каждый формирователь 950 луча выполняет формирование луча для передачи одного потока символов на одной собственной моде одного поддиапазона. Каждый формирователь 950 луча принимает один подпоток  символов и один собственный вектор
символов и один собственный вектор  для ассоциированного собственного режима. В частности, формирователь 950а луча принимает собственный вектор
для ассоциированного собственного режима. В частности, формирователь 950а луча принимает собственный вектор  для первой собственной моды, формирователь 950b луча принимает собственный вектор
для первой собственной моды, формирователь 950b луча принимает собственный вектор  для второй собственной моде и т.д. Формирование луча выполняется с помощью собственного вектора для ассоциированной собственной моды.
для второй собственной моде и т.д. Формирование луча выполняется с помощью собственного вектора для ассоциированной собственной моды.
В каждом формирователе 950 луча масштабированные символы модуляции подаются на четыре перемножителя 952а-952d, которые также принимают четыре элемента:  ,
,  ,
,  и
и  собственного вектора
собственного вектора  для ассоциированной собственной моды. Каждый перемножитель 952 затем перемножает масштабированные символы модуляции с их значением
для ассоциированной собственной моды. Каждый перемножитель 952 затем перемножает масштабированные символы модуляции с их значением  собственного вектора для получения символов "сформированного луча". Перемножители 952а-952d подают четыре подпотока символов сформированного луча (которые должны передаваться четырьмя антеннами) на сумматоры 960а-960d, соответственно.
собственного вектора для получения символов "сформированного луча". Перемножители 952а-952d подают четыре подпотока символов сформированного луча (которые должны передаваться четырьмя антеннами) на сумматоры 960а-960d, соответственно.
Каждый сумматор 960 принимает и суммирует четыре символа сформированного луча для четырех собственных мод для каждого символьного периода для подачи предварительно преобразованного символа в соответствующую передающую антенну. Сумматоры 960а-960d подают четыре подпотока предварительно преобразованных символов для четырех передающих антенн в буферы/мультиплексоры 970а-970d, соответственно.
Каждый буфер/мультиплексор 970 принимает пилотные символы и предварительно преобразованные символы из ПРД поддиапазонных пространственных процессоров 940а-940k для 48 поддиапазонов данных. Затем каждый буфер/мультиплексор 970, для каждого символьного периода, мультиплексирует 4 пилотных символа, 48 предварительно преобразованных символа и 12 нулей для 4 пилотных поддиапазонов, 48 поддиапазонов данных и 12 неиспользуемых поддиапазонов, соответственно, для формирования последовательности из 64 символов передачи для этого символьного периода. Каждый буфер/мультиплексор 970 подает поток символов  передачи для одной передающей антенны, где поток символов передачи содержит конкатенированные последовательности из 64 символов передачи. Символы передачи могут масштабироваться коэффициентами коррекции с учетом различий между цепями передачи/приема в пункте доступа и пользовательском терминале, как описано ниже. Последующая модуляция МОРЧ для каждого потока символов модуляции описана выше.
передачи для одной передающей антенны, где поток символов передачи содержит конкатенированные последовательности из 64 символов передачи. Символы передачи могут масштабироваться коэффициентами коррекции с учетом различий между цепями передачи/приема в пункте доступа и пользовательском терминале, как описано ниже. Последующая модуляция МОРЧ для каждого потока символов модуляции описана выше.
Параллельные потоки символов могут также передаваться четырьмя передающими антеннами без пространственной обработки в пункте доступа с помощью режима неуправляемого пространственного мультиплексирования. Для этого режима процесс инверсии каналов и формирование луча формирователем 950 луча могут быть опущены. Для каждого потока символов модуляции затем обеспечивается обработка МОРЧ и передается соответствующей передающей антенной.
Режим неуправляемого пространственного мультиплексирования может использоваться для различных ситуаций, таких, как если передатчик не в состоянии выполнять пространственную обработку, необходимую для поддержания управления лучом на основании декомпозиции по собственным модам. Это может иметь место вследствие того, что передатчик не выполнил процедуры калибровки, не может генерировать достаточно хорошую оценку канала или вообще не имеет возможностей калибровки и обработки собственных мод. Для режима неуправляемого пространственного мультиплексирования пространственное мультиплексирование все же используется, чтобы увеличить пропускную способность передачи, а пространственная обработка для разделения отдельных потоков символов выполняется приемником.
Для режима неуправляемого пространственного мультиплексирования приемник выполняет пространственную обработку, чтобы восстановить переданные потоки символов. В частности, пользовательский терминал может воплощать метод инверсии корреляционной матрицы каналов (ИКМК) (CCMI), метод минимальной среднеквадратичной ошибки (МСКО) (MMSE), метод обработки в приемнике успешного подавления помех или какой-нибудь другой метод пространственной обработки в приемнике. Эти методы описаны подробно в патентной заявке США № 09/993.087 на "Систему связи множественного доступа МВхМВых", поданной 6 ноября 2001. Режим неуправляемого пространственного мультиплексирования может использоваться для передач нисходящей линии и восходящей линии.
Многопользовательский режим пространственного мультиплексирования поддерживает передачу данных ко множеству пользовательских терминалов одновременно по нисходящей линии на основе "пространственных сигнатур" пользовательских терминалов. Пространственная сигнатура для пользовательского терминала задается вектором канальных откликов (для каждого поддиапазона) между антеннами пункта доступа и каждой антенной пользовательского терминала. Пункт доступа может получать пространственные сигнатуры, к примеру, на основе управляемого эталона, переданного пользовательскими терминалами. Пункт доступа может обрабатывать пространственные сигнатуры для пользовательских терминалов, которым требуется передача данных, чтобы (1) выбрать набор пользовательских терминалов для одновременной передачи данных по нисходящей линии и (2) выделить управляющие векторы для каждого из независимых потоков данных, для передачи к выбранным пользовательским терминалам.
Управляющие векторы для многопользовательского режима пространственного мультиплексирования могут быть получены различными путями. Ниже описаны две примерные схемы. Для простоты, нижеследующее описание представлено для одного поддиапазона и предполагает, что каждый пользовательский терминал снабжен единственной антенной.
В первой схеме пункт доступа получает управляющие векторы с помощью инверсии каналов. Пункт доступа может выбрать  одноантенных пользовательских терминалов для одновременной передачи по нисходящей линии. Пункт доступа получает вектор-строку канальных откликов размером 1× для каждого выбранного пользовательского терминала и формирует матрицу
одноантенных пользовательских терминалов для одновременной передачи по нисходящей линии. Пункт доступа получает вектор-строку канальных откликов размером 1× для каждого выбранного пользовательского терминала и формирует матрицу  канальных откликов размером × с векторами-строк для пользовательских терминалов. Затем пункт доступа получает матрицу
канальных откликов размером × с векторами-строк для пользовательских терминалов. Затем пункт доступа получает матрицу  из управляющих векторов для выбранных пользовательских терминалов как=
из управляющих векторов для выбранных пользовательских терминалов как= . Пункт доступа может также передать управляемый эталон на каждый выбранный пользовательский терминал. Каждый пользовательский терминал обрабатывает свой управляемый эталон для оценки усиления и фазы канала и когерентно демодулирует принятые символы для своей единственной антенны с оценками усиления и фазы канала для получения восстановленных символов.
. Пункт доступа может также передать управляемый эталон на каждый выбранный пользовательский терминал. Каждый пользовательский терминал обрабатывает свой управляемый эталон для оценки усиления и фазы канала и когерентно демодулирует принятые символы для своей единственной антенны с оценками усиления и фазы канала для получения восстановленных символов.
Во второй схеме пункт доступа предварительно кодирует  потоков символов для передачи к пользовательским терминалам, так что эти потоки символов испытывают малые перекрестные помехи в пользовательских терминалах. Пункт доступа может формировать матрицу
потоков символов для передачи к пользовательским терминалам, так что эти потоки символов испытывают малые перекрестные помехи в пользовательских терминалах. Пункт доступа может формировать матрицу  канальных откликов для выбранных пользовательских терминалов и выполнить разложение на множители QR над
канальных откликов для выбранных пользовательских терминалов и выполнить разложение на множители QR над  так, что
так, что  =
= , где
, где  представляет собой нижнюю левую треугольную матрицу, а
представляет собой нижнюю левую треугольную матрицу, а  является единичной матрицей. Затем пункт доступа предварительно кодирует потоков символов данных матрицей для получения потоков
является единичной матрицей. Затем пункт доступа предварительно кодирует потоков символов данных матрицей для получения потоков  предварительно кодированных символов, и далее обрабатывает потоки предварительно кодированных символов единичной матрицей
предварительно кодированных символов, и далее обрабатывает потоки предварительно кодированных символов единичной матрицей  для получения потоков передаваемых символов для передачи на пользовательских терминалов. Пункт доступа может также передавать управляемый эталон на каждый пользовательский терминал. Каждый пользовательский терминал использует управляемый эталон для когерентной демодуляции принятых символов для получения восстановленных символов.
для получения потоков передаваемых символов для передачи на пользовательских терминалов. Пункт доступа может также передавать управляемый эталон на каждый пользовательский терминал. Каждый пользовательский терминал использует управляемый эталон для когерентной демодуляции принятых символов для получения восстановленных символов.
Для восходящей линии в многопользовательском режиме пространственного мультиплексирования пункт доступа может восстанавливать потоков символов, переданных одновременно пользовательскими терминалами с использованием обработки приемника МСКО, успешного подавления помех или какого-нибудь другого метода обработки в приемнике. Пункт доступа может оценивать канальный отклик восходящей линии для каждого пользовательского терминала и использовать оценку канальных откликов для пространственной обработки в приемнике и для планирования передач восходящей линии. Каждый одноантенный пользовательский терминал может передавать ортогональный пилот-сигнал по восходящей линии. Пилот-сигналы восходящей линии от пользовательских терминалов могут быть ортогональны по времени и (или) частоте. Временная ортогональность может достигаться тем, что каждый пользовательский терминал модулирует свой пилот-сигнал восходящей линии ортогональной последовательностью, назначенной этому пользовательскому терминалу. Частотная ортогональность может достигаться тем, что каждый пользовательский терминал передает свой пилот-сигнал восходящей линии в отличающемся наборе поддиапазонов. Передачи восходящей линии от пользовательских терминалов должны быть приблизительно совмещены по времени в пункте доступа (например, совмещены по времени в пределах циклического префикса).
3. Режим управления лучом - обработка передачи
Фиг.10А показывает блок-схему передающего блока 1000, способного выполнять обработку передачи для режима управления лучом. Передающий блок 1000 является еще одним вариантом осуществления передающей части пункта доступа и пользовательского терминала.
В ПРД процессоре 710с данных блок 808 формирования кадров кадрирует данные для каждого пакета FCH/RCH для генерации одного или более кадров PHY для пакета. Скремблер 810 скремблирует затем данные для каждого транспортного канала. Кодер 812 вслед за этим кодирует кадрированные данные в соответствии с выбранной схемой кодирования для получения кодовых битов. Блок 814 прореживания затем прореживает кодовые биты для получения желательной кодовой скорости для широкополосной собственной моды, используемой для передачи данных. Кодовые биты из блока 818 прореживания перемежаются по всем поддиапазонам данных. Блок 820 посимвольного отображения отображает затем перемеженные данные в соответствии с выбранной схемой модуляции для получения символов модуляции. ПРД пространственный процессор 720с затем выполняет процедуру обработки передачи над символами модуляции для режима управления лучом.
Режим управления лучом может использоваться для передачи данных в пространственном канале или на широкополосной собственной моде, - как правило, он ассоциируется с наибольшими собственными значениями для всех поддиапазонов данных. Режим управления лучом может выбираться, если распределение мощности передачи по широкополосным собственным модам приводит к тому, что только одна составляющая в наборе  является ненулевой. В то время как режим пространственного мультиплексирования выполняет формирование луча для каждой из выбранных собственных мод каждого поддиапазона на основе собственного вектора, режим управления лучом выполняет управление лучом на основе "нормированного" собственного вектора для главной собственной моды каждого поддиапазона для передачи данных на этой единственной собственной моде.
является ненулевой. В то время как режим пространственного мультиплексирования выполняет формирование луча для каждой из выбранных собственных мод каждого поддиапазона на основе собственного вектора, режим управления лучом выполняет управление лучом на основе "нормированного" собственного вектора для главной собственной моды каждого поддиапазона для передачи данных на этой единственной собственной моде.
Четыре элемента каждого собственного вектора  для
для  ∈
∈ для главной собственной моды могут иметь различные величины. Четыре предварительно преобразованных символа, полученных на основе четырех элементов собственного вектора
для главной собственной моды могут иметь различные величины. Четыре предварительно преобразованных символа, полученных на основе четырех элементов собственного вектора  для каждого поддиапазона, могут тогда иметь разные величины. Следовательно, четыре вектора передачи на каждую антенну, каждый из которых включает в себя предварительно обработанные символы для всех поддиапазонов данных для заданной передающей антенны, могут иметь различные величины. Если мощность передачи для каждой передающей антенны ограничена (к примеру, из-за ограничений усилителей мощности), то метод формирования луча может не полностью использовать полную мощность, доступную для каждой антенны.
для каждого поддиапазона, могут тогда иметь разные величины. Следовательно, четыре вектора передачи на каждую антенну, каждый из которых включает в себя предварительно обработанные символы для всех поддиапазонов данных для заданной передающей антенны, могут иметь различные величины. Если мощность передачи для каждой передающей антенны ограничена (к примеру, из-за ограничений усилителей мощности), то метод формирования луча может не полностью использовать полную мощность, доступную для каждой антенны.
Режим управления лучом использует только фазовую информацию из собственных векторов  для
для  ∈
∈ для главной собственной моды и нормирует каждый собственный вектор так, чтобы все четыре элемента в собственном векторе имели равные величины. Нормированный собственный вектор
для главной собственной моды и нормирует каждый собственный вектор так, чтобы все четыре элемента в собственном векторе имели равные величины. Нормированный собственный вектор  для поддиапазона
для поддиапазона  может быть выражен как:
может быть выражен как:

где  является постоянной (например,
является постоянной (например,  =1); и
=1); и
 является фазой для поддиапазона
является фазой для поддиапазона  передающей антенны , которая задается как:
передающей антенны , которая задается как:

Как показано в уравнении (17), фаза каждого элемента в векторе  получается из соответствующего элемента собственного вектора
получается из соответствующего элемента собственного вектора  (т.е.
(т.е.  получается из
получается из  , где
, где  ).
).
Инверсия каналов может также выполняться для режима управления лучом, чтобы общая скорость передачи могла быть использована для всех поддиапазонов данных. Мощность  , выделенная каждому поддиапазону данных для режима управления лучом, может быть выражена как:
, выделенная каждому поддиапазону данных для режима управления лучом, может быть выражена как:

где  является коэффициентом нормировки, который хранит инвариант полной мощности передачи после того, как применена инверсия каналов;
является коэффициентом нормировки, который хранит инвариант полной мощности передачи после того, как применена инверсия каналов;
 является мощностью передачи, выделенной каждой из четырех антенн; и
является мощностью передачи, выделенной каждой из четырех антенн; и
 представляет собой коэффициент усиления мощности для поддиапазона
представляет собой коэффициент усиления мощности для поддиапазона  главной собственной моды для режима управления лучом.
главной собственной моды для режима управления лучом.
Коэффициент  нормировки может быть выражен как:
нормировки может быть выражен как:

Мощность  передачи может задаваться как
передачи может задаваться как  =
=  (т.е. равномерное распределение полной мощности передачи по четырем передающим антеннам). Коэффициент
(т.е. равномерное распределение полной мощности передачи по четырем передающим антеннам). Коэффициент  усиления мощности может быть выражен как:
усиления мощности может быть выражен как:

Инверсия каналов приводит к распределению мощности  для
для  ∈
∈ для 48 поддиапазонов данных. Усиление для каждого поддиапазона данных может затем быть задано как
для 48 поддиапазонов данных. Усиление для каждого поддиапазона данных может затем быть задано как  .
.
Для режима управления лучом вектор  передачи для каждого поддиапазона может быть выражен как:
передачи для каждого поддиапазона может быть выражен как:

Опять-таки для простоты, уравнение (21) не включает в себя коэффициенты коррекции, используемые для расчета различий между цепями передачи/приема в пункте доступа и пользовательском терминале.
Как показано в уравнении (16), четыре элемента нормированного управляющего вектора  для каждого поддиапазона имеют равную величину, но, возможно, разные фазы. Таким образом, управление лучом генерирует один вектор
для каждого поддиапазона имеют равную величину, но, возможно, разные фазы. Таким образом, управление лучом генерирует один вектор  передачи для каждого поддиапазона с четырьмя элементами
передачи для каждого поддиапазона с четырьмя элементами  , имеющими одну и ту величину, но, возможно, разные фазы.
, имеющими одну и ту величину, но, возможно, разные фазы.
Фиг.10В показывает блок-схему варианта осуществления ПРД пространственного процессора 720с, обеспечивающего выполнение пространственной обработки для режима управления лучом.
В процессе 720с демультиплексор 1032 принимает и демультиплексирует поток  символов модуляции в 48 подпотоков для 48 поддиапазонов данных (обозначенных как
символов модуляции в 48 подпотоков для 48 поддиапазонов данных (обозначенных как  -
-  ). Каждый подпоток символов подается на соответствующий ПРД поддиапазонный процессор 1040 управления лучом. Каждый процессор 1040 выполняет обработку, показанную в уравнении (14), для одного поддиапазона.
). Каждый подпоток символов подается на соответствующий ПРД поддиапазонный процессор 1040 управления лучом. Каждый процессор 1040 выполняет обработку, показанную в уравнении (14), для одного поддиапазона.
В каждом ПРД поддиапазонном процессоре 1040 управления лучом подпоток символов модуляции подается на перемножитель 1042, который принимает также коэффициент  усиления для ассоциированного поддиапазона. Перемножитель 1042 масштабирует затем символы модуляции коэффициентом усиления, чтобы получить масштабированные символы модуляции, которые затем подаются в блок 1050 управления лучом.
усиления для ассоциированного поддиапазона. Перемножитель 1042 масштабирует затем символы модуляции коэффициентом усиления, чтобы получить масштабированные символы модуляции, которые затем подаются в блок 1050 управления лучом.
Блок 1050 управления лучом принимает также нормированный собственный вектор  для ассоциированного поддиапазона. В блоке 1050 управления лучом масштабированные символы модуляции подаются на четыре перемножителя 1052а-1052d, которые также соответственно принимают четыре элемента
для ассоциированного поддиапазона. В блоке 1050 управления лучом масштабированные символы модуляции подаются на четыре перемножителя 1052а-1052d, которые также соответственно принимают четыре элемента  ,
,  ,
,  и
и  нормированного собственного вектора
нормированного собственного вектора  . Каждый перемножитель 1052 перемножает свои масштабированные символы модуляции со значением
. Каждый перемножитель 1052 перемножает свои масштабированные символы модуляции со значением  нормированного собственного вектора, чтобы обеспечить предварительно преобразованные символы. Перемножители 1052а-1052d подают четыре предварительно преобразованных подпотока в буферы/мультиплексоры 1070а-1070d, соответственно.
нормированного собственного вектора, чтобы обеспечить предварительно преобразованные символы. Перемножители 1052а-1052d подают четыре предварительно преобразованных подпотока в буферы/мультиплексоры 1070а-1070d, соответственно.
Каждый буфер/мультиплексор 1070 принимает пилотные символы и предварительно преобразованные символы из ПРД поддиапазонных процессоров 1040а-1040k управления лучом для 48 поддиапазонов данных, мультиплексирует пилотные и предварительно преобразованные символы и нули для каждого символьного периода и подает поток символов  передачи в одну передающую антенну. Последующая модуляция МОРЧ для каждого символа передачи описана выше.
передачи в одну передающую антенну. Последующая модуляция МОРЧ для каждого символа передачи описана выше.
Обработка для режима управления лучом описана более подробно в патентной заявке США № 10/228.393 на "Управление лучом и формирование луча в широкополосных системах МВхМВых", поданной 27 августа 2002. Система может также быть спроектирована для поддержания режима формирования луча, посредством чего поток данных передается на главной собственной моде с использованием собственного вектора вместо нормированного собственного вектора.
4. Кадрирование для кадров PHY
Фиг.11А показывает вариант осуществления блока 808 формирования кадров, который используется для кадрирования данных для каждого пакета FCH/RCH перед последующей обработкой ПРД процессором данных. Эта функция кадрирования может не использоваться для сообщений, посланных по каналам ВСН, FCCH и RACH. Блок формирования кадров генерирует целое число кадров PHY для каждого пакета FCH/RCH, где каждый кадр PHY охватывает 6 символов МОРЧ для описанного здесь варианта осуществления.
Для режимов разнесения и управления лучом только один пространственный канал или широкополосная собственная мода используется для передачи данных. Скорость для этой моды известна, и может быть вычислено число информационных битов, которые можно посылать в полезной нагрузке каждого кадра PHY. Для режима пространственного мультиплексирования множество пространственных каналов может использоваться для передачи данных. Поскольку скорость передачи каждого пространственного канала известна, может быть вычислено число информационных битов, которые можно посылать в полезной нагрузке каждого кадра PHY для всех пространственных каналов.
Как показано на фиг.11А, информационные биты (обозначенные как  ) для каждого пакета FCH/RCH подаются в генератор 1102 CRC и мультиплексор 1104 в блоке 808 формирования кадров. Генератор 1102 CRC генерирует значение CRC для битов в заголовке (если он есть) и полях полезной нагрузки каждого кадра PHY и подает биты CRC в мультиплексор 1104. Мультиплексор 1104 принимает информационные биты, биты CRC, биты заголовка и заполняющие биты (например, нули) и подает эти биты в должном порядке, как показано на фиг.6, на основании сигнала управления кадрами PHY. Функция кадрирования может не использоваться при подаче информационных битов непосредственно через мультиплексор 1104. Кадрированные или некадрированные биты (обозначенные как
) для каждого пакета FCH/RCH подаются в генератор 1102 CRC и мультиплексор 1104 в блоке 808 формирования кадров. Генератор 1102 CRC генерирует значение CRC для битов в заголовке (если он есть) и полях полезной нагрузки каждого кадра PHY и подает биты CRC в мультиплексор 1104. Мультиплексор 1104 принимает информационные биты, биты CRC, биты заголовка и заполняющие биты (например, нули) и подает эти биты в должном порядке, как показано на фиг.6, на основании сигнала управления кадрами PHY. Функция кадрирования может не использоваться при подаче информационных битов непосредственно через мультиплексор 1104. Кадрированные или некадрированные биты (обозначенные как  ) подаются в скремблер 810.
) подаются в скремблер 810.
5. Скремблирование
В варианте осуществления биты данных для каждого транспортного канала скремблируются перед кодированием. Скремблирование рандомизирует данные так, чтобы длинная последовательность всех единиц или всех нулей не передавалась. Это может снизить изменения между пиковой и средней мощностью колебания МОРЧ. Скремблирование может быть опущено для одного или более транспортных каналов и может также выборочно разрешаться или запрещаться.
Фиг.11А показывает также вариант осуществления скремблера 810. В этом варианте осуществления скремблер 810 реализует генераторный полином:

Можно также использовать и иные генераторные полиномы, и это входит в объем изобретения.
Как показано на фиг.11А, скремблер 810 включает в себя семь элементов 1112а-1112g задержки, соединенных последовательно. Для каждого тактового периода сумматор 1114 выполняет сложение по модулю 2 двух битов, хранящихся в элементах 111d и 1112g задержки и подает бит скремблирования в элемент 1112а задержки.
Кадрированные/некадрированные биты ( ) подаются в сумматор 1116, который также принимает биты скремблирования из сумматора 1114. Сумматор 1116 выполняет сложение по модулю 2 каждого бита
) подаются в сумматор 1116, который также принимает биты скремблирования из сумматора 1114. Сумматор 1116 выполняет сложение по модулю 2 каждого бита  с соответствующим битом скремблирования, чтобы получить бит скремблирования
с соответствующим битом скремблирования, чтобы получить бит скремблирования  . Скремблер 810 выдает последовательность битов скремблирования, которые обозначены как
. Скремблер 810 выдает последовательность битов скремблирования, которые обозначены как  .
.
Начальное состояние скремблера (т.е. содержимое элементов 1112а-1112g задержки) устанавливается на 7-битовое ненулевое число в начале кадра ДВР. Три старших бита (MSB) (т.е. элемент 1112е-1112f задержки) всегда установлены на единицу ("1"), а четыре младших бита (LSB) устанавливаются соответственно счетчику кадров ДВР, как указано в сообщении ВСН.
6. Кодирование/прореживание
В варианте осуществления для кодирования данных перед передачей используется единственный базовый код. Этот базовый код генерирует кодовые биты для одной кодовой скорости. Все остальные кодовые скорости, поддерживаемые системой (как перечислено в Таблице 25), могут быть получены либо повторением, либо прореживанием этих кодовых битов.
Фиг.11В показывает вариант осуществления кодера 812, который воплощает базовый код для системы. В этом варианте осуществления базовый код является сверточным кодом со скоростью 1/2, длиной ограничения 7 ( =7), с генераторами из 133 и 171 (октальными).
=7), с генераторами из 133 и 171 (октальными).
В кодере 812 мультиплексор 1120 принимает и мультиплексирует биты скремблирования и хвостовые биты (к примеру, нули). Кодер 812 далее включает в себя шесть элементов 1122а-1122f задержки, соединенных последовательно. Четыре сумматора 1124а-1124d также соединены последовательно и используются для реализации первого генератора (133). Аналогично, четыре сумматора 1126а-1126d соединены последовательно и используются для реализации второго генератора (171). Эти сумматоры также соединены с элементами задержки для реализации двух генераторов 133 и 171, как показано на фиг.11В.
Биты скремблирования подаются на первый элемент 1122а задержки и на сумматоры 1124а и 1126а. Для каждого тактового периода сумматоры 1124а-1124d выполняют сложение по модулю 2 поступающего бита и четырех предшествующих битов, сохраненных в элементах 1122b, 1122с, 1122е и 1122f задержки, чтобы получить первый кодовый бит для этого тактового периода. Аналогично, сумматоры 1126а-1126d выполняют сложение по модулю 2 поступающего бита и четырех предшествующих битов, сохраненных в элементах 1122а, 1122b, 1122с и 1122f задержки, чтобы получить второй кодовый бит для этого тактового периода. Кодовые биты, генерированные первым генератором, обозначаются как  , а кодовые биты, генерированные вторым генератором, обозначаются как
, а кодовые биты, генерированные вторым генератором, обозначаются как  . Мультиплексор 1128 затем принимает и мультиплексирует два потока кодовых битов из этих двух генераторов в единый поток кодовых битов, которые обозначаются как
. Мультиплексор 1128 затем принимает и мультиплексирует два потока кодовых битов из этих двух генераторов в единый поток кодовых битов, которые обозначаются как  . Для каждого бита скремблирования
. Для каждого бита скремблирования  генерируются два кодовых бита
генерируются два кодовых бита  и
и  , что приводит к кодовой скорости 1/2.
, что приводит к кодовой скорости 1/2.
Фиг.11В показывает также вариант осуществления блока 814 повторения/прореживания, который может использоваться для генерирования других кодовых скоростей на основе базовой скорости 1/2. В блоке 814 кодовые биты со скоростью 1/2 из кодера 812 подаются в повторяющий блок 1132 и прореживающий блок 1134. Повторяющий блок 1132 повторяет каждый кодовый бит со скоростью 1/2 один раз для получения эффективной кодовой скорости 1/4. Прореживающий блок 1134 удаляет некоторые из кодовых битов со скоростью 1/2 на основе конкретного прореживающего шаблона, чтобы получить желательную кодовую скорость.
В Таблице 30 перечислены примерные прореживающие шаблоны, которые можно использовать для различных кодовых скоростей, поддерживаемых системой. Другие прореживающие шаблоны могут также использоваться, и это входит в объем изобретения.
Чтобы получить кодовую скорость  , прореживающий блок 1134 обеспечивает кодовых битов для каждой группы из
, прореживающий блок 1134 обеспечивает кодовых битов для каждой группы из  кодовых битов со скоростью 1/2, принятых от кодера 812. Таким образом,
кодовых битов со скоростью 1/2, принятых от кодера 812. Таким образом,  кодовых битов удаляются из каждой группы в кодовых битов. Биты, подлежащие удалению из каждой группы, обозначаются нулями в прореживающем шаблоне. Например, чтобы получить кодовую скорость 7/12, два бита удаляются из каждой группы в 14 кодовых битов из кодера 812, причем удаляемыми битами являются 8-й и 14-й кодовые биты в группе, как обозначено прореживающим шаблоном "11111110111110". Никакого прореживания не выполняется, если желательной кодовой скоростью является 1/2.
кодовых битов удаляются из каждой группы в кодовых битов. Биты, подлежащие удалению из каждой группы, обозначаются нулями в прореживающем шаблоне. Например, чтобы получить кодовую скорость 7/12, два бита удаляются из каждой группы в 14 кодовых битов из кодера 812, причем удаляемыми битами являются 8-й и 14-й кодовые биты в группе, как обозначено прореживающим шаблоном "11111110111110". Никакого прореживания не выполняется, если желательной кодовой скоростью является 1/2.
Мультиплексор 1136 принимает поток кодовых битов из повторяющего блока 1132 и поток кодовых битов из прореживающего блока 1134. Мультиплексор 1136 затем обеспечивает кодовые биты из повторяющего блока 1132, если желательной кодовой скоростью является 1/4, и кодовые биты из прореживающего блока 1134, если желательной кодовой скоростью является 1/2 или выше.
Другие коды и прореживающие шаблоны помимо описанных выше могут также использоваться, и это входит в объем изобретения. К примеру, турбокод, блочный код, некоторые другие коды или их сочетание могут использоваться для кодирования данных. Кроме того, разные кодирующие схемы могут использоваться для разных транспортных каналов. Например, для общих транспортных каналов может использоваться сверточное кодирование, а для выделенных транспортных каналов может использоваться турбо кодирование.
7. Перемежение
В варианте осуществления кодовые биты, подлежащие передаче, перемежаются по 48 поддиапазонам данных. Для режимов разнесения и управления лучом один поток кодовых битов передается и перемежается по всем поддиапазонам данных. Для режима пространственного мультиплексирования до четырех потоков кодовых битов могут передаваться по пространственным каналам числом до четырех. Перемежение может выполняться раздельно для каждого пространственного канала, так что каждый поток кодовых данных перемежается по всем поддиапазонам данных пространственного канала, используемого для передачи этого потока. Таблица 29 показывает примерное назначение кодовых битов - поддиапазонов, которое может использоваться для перемежения для всех транспортных режимов.
В одном варианте осуществления перемежение выполняется по всем 48 поддиапазонам данных в каждом интервале перемежения. Для этого варианта осуществления каждая группа из 48 кодовых битов в потоке распределяется по 48 поддиапазонам данных, чтобы обеспечить частотное разнесение. 48 кодовым битам в каждой группе могут быть назначены индексы от 0 до 47. Каждый индекс кодовых битов ассоциируется с соответствующим поддиапазоном. Все кодовые биты с конкретным индексом передаются в ассоциированном поддиапазоне. Например, первый кодовый бит (с индексом 0) в каждой группе передается в поддиапазоне -26, второй кодовый бит (с индексом 1) передается в поддиапазоне 1, третий кодовый бит (с индексом 2) передается в поддиапазоне -17 и т.д. Схема перемежения может использоваться для режимов разнесения, управления лучом и пространственного мультиплексирования. Альтернативная схема перемежения для режима пространственного мультиплексирования описана ниже.
Перемежение может альтернативно или дополнительно выполняться во времени. К примеру, после перемежения по поддиапазонам данных кодовые биты для каждого поддиапазона могут перемежаться (например, по одному кадру PHY или одному ПБД), чтобы обеспечить временное разнесение. Для режима пространственного мультиплексирования перемежение может также выполняться по множеству пространственных каналов.
Дополнительно, перемежение может применяться по размерностям символов КАМ, так что кодовые биты, формирующие символы КАМ, отображаются в различные битовые позиции символов КАМ.
8. Отображение символов
Таблица 31 показывает отображение символов для различных схем модуляции, поддерживаемых системой. Для каждой схемы модуляции (за исключением BPSK) половина битов отображаются в синфазную ( ) компоненту, другая половина битов отображается в квадратурную (
) компоненту, другая половина битов отображается в квадратурную ( ) компоненту.
) компоненту.
В варианте осуществления группа сигналов для каждой поддерживаемой схемы модуляции может быть определена на основе отображения Грея. При отображении Грея соседние точки в группе сигналов (как в  , так и в
, так и в  компонентах) отличаются только одной битовой позицией. Отображение Грея снижает число битовых ошибок для более вероятных ошибочных событий, что соответствует принятому символу, отображаемому в местоположение вблизи правильного местоположения, в каковом случае только один кодовый бит будет принят с ошибкой.
компонентах) отличаются только одной битовой позицией. Отображение Грея снижает число битовых ошибок для более вероятных ошибочных событий, что соответствует принятому символу, отображаемому в местоположение вблизи правильного местоположения, в каковом случае только один кодовый бит будет принят с ошибкой.













 нормировки
нормировки



Значения  и
и  для каждой схемы модуляции, показанной в Таблице 31, масштабируются коэффициентом
для каждой схемы модуляции, показанной в Таблице 31, масштабируются коэффициентом  нормировки так, что средняя мощность всех сигнальных точек в ассоциированной группе сигналов равно единице. Коэффициент нормировки для каждой схемы модуляции показан в Таблице 31. Квантованные значения для коэффициентов нормировки для поддерживаемых схем модуляции также могут использоваться. Символ
нормировки так, что средняя мощность всех сигнальных точек в ассоциированной группе сигналов равно единице. Коэффициент нормировки для каждой схемы модуляции показан в Таблице 31. Квантованные значения для коэффициентов нормировки для поддерживаемых схем модуляции также могут использоваться. Символ  модуляции из конкретной группы сигналов будет иметь следующий вид:
модуляции из конкретной группы сигналов будет иметь следующий вид:

где  и
и  являются значениями в Таблице 31 для группы сигналов.
являются значениями в Таблице 31 для группы сигналов.
Для заданного ПБД модуляция может отличаться по ПБД и может отличаться для множества пространственных каналов, используемых для передачи данных. Например, для ПБД ВСН различные схемы модуляции могут использоваться для маякового пилот-сигнала, пилот-сигнала МВхМВых и сообщения ВСН.
9. Обработка для режима пространственного мультиплексирования
Для режима пространственного мультиплексирования ПБД может передаваться по множеству пространственных каналов. Различные схемы могут использоваться для обработки данных для передачи по множеству пространственных каналов. Две конкретные схемы обработки для режима пространственного мультиплексирования описаны ниже.
В первой схеме обработки кодирование и прореживание выполняются для каждого пространственного канала для достижения желательной кодовой скорости для каждого пространственного канала.  пространственных каналов для использования для передачи данных ранжируются от наивысшего к наинизшему отношению С/Ш для принятого сигнала. Данные для всего ПБД сначала кодируются, чтобы получить поток кодовых битов со скоростью 1/2. Эти кодовые биты затем прореживаются, чтобы получить желательную кодовую скорость для каждого пространственного канала.
пространственных каналов для использования для передачи данных ранжируются от наивысшего к наинизшему отношению С/Ш для принятого сигнала. Данные для всего ПБД сначала кодируются, чтобы получить поток кодовых битов со скоростью 1/2. Эти кодовые биты затем прореживаются, чтобы получить желательную кодовую скорость для каждого пространственного канала.
Прореживание может быть выполнено последовательно для  пространственных каналов от наилучшего (т.е. наивысшего С/Ш) к наихудшему (т.е. наинизшему С/Ш) пространственному каналу. В частности, прореживающий блок сначала выполняет прореживание для наилучшего пространственного канала с наивысшим отношением С/Ш для принятого сигнала. Когда правильное число кодовых битов генерированы для наилучшего пространственного канала, прореживающий блок затем выполняет прореживание для второго лучшего пространственного канала со следующим по величине отношением С/Ш для принятого сигнала. Этот процесс продолжается до тех пор, пока не будут генерированы кодовые биты для всех
пространственных каналов от наилучшего (т.е. наивысшего С/Ш) к наихудшему (т.е. наинизшему С/Ш) пространственному каналу. В частности, прореживающий блок сначала выполняет прореживание для наилучшего пространственного канала с наивысшим отношением С/Ш для принятого сигнала. Когда правильное число кодовых битов генерированы для наилучшего пространственного канала, прореживающий блок затем выполняет прореживание для второго лучшего пространственного канала со следующим по величине отношением С/Ш для принятого сигнала. Этот процесс продолжается до тех пор, пока не будут генерированы кодовые биты для всех  пространственных каналов. Порядок для прореживания - от наибольшего к наименьшему С/Ш для принятого сигнала независимо от конкретной кодовой скорости, используемой для каждого пространственного канала.
пространственных каналов. Порядок для прореживания - от наибольшего к наименьшему С/Ш для принятого сигнала независимо от конкретной кодовой скорости, используемой для каждого пространственного канала.
Для примера, показанного в Таблице 28, 3456 информационных битов, подлежащих передаче в общем кадре PHY, сначала кодируются базовым кодом со скоростью 1/2, чтобы получить 6912 кодовых бита. Первые 3168 кодовых битов прореживаются с помощью прореживающего шаблона для кодовой скорости 11/16, чтобы получить 2304 кодовых бита, которые обеспечиваются в кадре PHY для первого пространственного канала. Следующие 2592 кодовых бита затем прореживаются с помощью прореживающего шаблона для кодовой скорости 3/4, чтобы получить 1728 кодовых битов, которые обеспечиваются в кадре PHY для второго пространственного канала. Следующие 894 кодовых бита затем прореживаются с помощью прореживающего шаблона для кодовой скорости 3/4, чтобы получить 576 кодовых битов, которые обеспечиваются в кадре PHY для третьего пространственного канала. Последние 288 кодовых битов для кадра PHY прореживаются затем с помощью прореживающего шаблона для кодовой скорости 1/2, чтобы получить 288 кодовых битов, которые обеспечиваются в кадре PHY для последнего пространственного канала. Эти четыре отдельных кадра PHY обрабатываются далее и передаются на четырех пространственных каналах. Прореживание для следующего общего кадра PHY выполняется аналогичным образом. Первая схема обработки может быть реализована ПРД процессором 710b данных на фиг.9А.
Во второй схеме обработки кодирование и прореживание выполняются для пары поддиапазонов. Кроме того, кодирование и прореживание повторяются по всем выбранным пространственным каналам для каждой пары поддиапазонов.
Фиг.11С показывает блок-схему, которая иллюстрирует ПРД процессор 710d данных, который реализует вторую схему обработки. Кодер 812 выполняет сверточное кодирование со скоростью 1/2 битов скремблирования из скремблера 810. Каждому пространственному каналу назначается конкретная скорость передачи, которая ассоциируется с конкретной комбинацией кодовой скорости и схемы модуляции, как показано в Таблице 25. Пусть  обозначает число кодовых битов на символ модуляции для пространственного канала
обозначает число кодовых битов на символ модуляции для пространственного канала  (или, эквивалентно, число кодовых битов, посылаемых на каждом поддиапазоне данных пространственного канала
(или, эквивалентно, число кодовых битов, посылаемых на каждом поддиапазоне данных пространственного канала  ), а
), а  обозначает кодовую скорость, используемую для пространственного канала
обозначает кодовую скорость, используемую для пространственного канала  . Значение для
. Значение для  зависит от размера группы сигналов для схемы модуляции, используемой для пространственного канала
зависит от размера группы сигналов для схемы модуляции, используемой для пространственного канала  . В частности,
. В частности,  =1, 2, 4, 6 и 8 для BPSK, QPSK, 16-QAM, 64-QAM и 256-QAM, соответственно.
=1, 2, 4, 6 и 8 для BPSK, QPSK, 16-QAM, 64-QAM и 256-QAM, соответственно.
Кодер 812 подает поток кодовых битов со скоростью 1/2 на демультиплексор 816, который демультиплексирует принятый поток кодовых битов в четыре подпотока для четырех пространственных каналов. Демультиплексирование обеспечивает направление первых  кодовых битов в буфер 813а для пространственного канала 1, следующих
кодовых битов в буфер 813а для пространственного канала 1, следующих  кодовых битов - в буфер 813b для пространственного канала 2 и т.д. Каждый буфер 813 принимает
кодовых битов - в буфер 813b для пространственного канала 2 и т.д. Каждый буфер 813 принимает  кодовых битов каждый раз, как демультиплексор 816 проходит через все четыре пространственных канала. Все из
кодовых битов каждый раз, как демультиплексор 816 проходит через все четыре пространственных канала. Все из  кодовых битов со скоростью 1/2 подаются на четыре буфера 813а-813d для каждого периода. Демультиплексор 816, таким образом, проходит по всем четырем позициям для четырех пространственных каналов для каждых
кодовых битов со скоростью 1/2 подаются на четыре буфера 813а-813d для каждого периода. Демультиплексор 816, таким образом, проходит по всем четырем позициям для четырех пространственных каналов для каждых  кодовых битов, что является числом кодовых битов, которые могут быть переданы в паре поддиапазонов с использованием всех четырех пространственных каналов.
кодовых битов, что является числом кодовых битов, которые могут быть переданы в паре поддиапазонов с использованием всех четырех пространственных каналов.
Когда каждый буфер 813 заполнен  кодовыми битами для соответствующего пространственного канала, кодовые биты в буфере прореживаются, чтобы получить кодовую скорость для этого пространственного канала. Поскольку
кодовыми битами для соответствующего пространственного канала, кодовые биты в буфере прореживаются, чтобы получить кодовую скорость для этого пространственного канала. Поскольку  кодовых битов со скоростью 1/2 охватывают целое число периодов прореживания для каждого прореживающего шаблона, точно
кодовых битов со скоростью 1/2 охватывают целое число периодов прореживания для каждого прореживающего шаблона, точно  кодовых битов обеспечиваются после прореживания для каждого пространственного канала
кодовых битов обеспечиваются после прореживания для каждого пространственного канала  .
.  кодовых битов для каждого пространственного канала затем распределяются (перемежаются) по поддиапазонам данных.
кодовых битов для каждого пространственного канала затем распределяются (перемежаются) по поддиапазонам данных.
В варианте осуществления перемежение выполняется для каждого пространственного канала в группах из 6 поддиапазонов одновременно. Кодовые биты после прореживания для каждого пространственного канала могут быть пронумерованы последовательно как  , где
, где  = 0, 1, 2, …. Может иметься счетчик
= 0, 1, 2, …. Может иметься счетчик  для каждого пространственного канала для подсчета каждой группы из
для каждого пространственного канала для подсчета каждой группы из  кодовых битов, обеспеченных прореживающим блоком для этого пространственного канала. Например, для QPSK с
кодовых битов, обеспеченных прореживающим блоком для этого пространственного канала. Например, для QPSK с  =2 счетчик будет устанавливаться на =0 для кодовых битов
=2 счетчик будет устанавливаться на =0 для кодовых битов  -
-  , обеспеченных прореживающим блоком, =1 после кодовых битов
, обеспеченных прореживающим блоком, =1 после кодовых битов  -
-  и т.д. Значение счетчика для пространственного канала
и т.д. Значение счетчика для пространственного канала  может быть выражено как:
может быть выражено как:

Чтобы найти поддиапазон, которому назначается кодовый бит  , сначала для этого кодового бита находится битовый индекс следующим образом:
, сначала для этого кодового бита находится битовый индекс следующим образом:

Битовый индекс затем отображается в соответствующий поддиапазон с использованием Таблицы 29.
Для вышеприведенного примера, первая группа из 6 кодовых битов  -
-  связывается с битовыми индексами 0-5, соответственно, вторая группа из 6 кодовых битов
связывается с битовыми индексами 0-5, соответственно, вторая группа из 6 кодовых битов  -
-  также связывается с битовыми индексами 0 - 5, соответственно. Кодовые биты
также связывается с битовыми индексами 0 - 5, соответственно. Кодовые биты  и
и  будут отображаться в поддиапазон -26, кодовые биты
будут отображаться в поддиапазон -26, кодовые биты  и
и  будут отображаться в поддиапазон 1 и т.д., как показано в Таблице 29. Пространственная обработка может затем начинаться для этой первой группы из 6 поддиапазонов. Третья группа из 6 кодовых битов
будут отображаться в поддиапазон 1 и т.д., как показано в Таблице 29. Пространственная обработка может затем начинаться для этой первой группы из 6 поддиапазонов. Третья группа из 6 кодовых битов  -
-  (с
(с  =1) связывается с индексами 6 - 11, соответственно, а четвертая группа из 6 кодовых битов
=1) связывается с индексами 6 - 11, соответственно, а четвертая группа из 6 кодовых битов  -
-  также связывается с битовыми индексами 6 - 11, соответственно. Кодовые биты
также связывается с битовыми индексами 6 - 11, соответственно. Кодовые биты  и
и  будут отображаться в поддиапазон -25, кодовые биты
будут отображаться в поддиапазон -25, кодовые биты  и
и  будут отображаться в поддиапазон 2 и т.д. Пространственная обработка может затем начинаться для этой следующей группы из 6 поддиапазонов.
будут отображаться в поддиапазон 2 и т.д. Пространственная обработка может затем начинаться для этой следующей группы из 6 поддиапазонов.
Число 6 в уравнении (24) следует из того факта, что перемежение выполняется в группах из шести поддиапазонов. Операция (mod 8) в уравнении (23) следует из того факта, что имеется восемь перемежающихся групп для 48 поддиапазонов данных. Поскольку на каждом периоде демультиплексор 816, показанный на фиг.11С, вырабатывает достаточно кодовых битов, чтобы заполнить два поддиапазона для каждой широкополосной собственной моды, все 24 периода необходимы, чтобы обеспечить  кодовых битов для одного символа МОРЧ для каждого пространственного канала.
кодовых битов для одного символа МОРЧ для каждого пространственного канала.
Перемежение в группах из 6 поддиапазонов одновременно может снизить задержки обработки. В частности, пространственная обработка может начинаться, когда каждая группа из 6 поддиапазонов доступна.
В альтернативных вариантах осуществления перемежение может выполняться для каждого пространственного канала в группах из  поддиапазонов одновременно, где
поддиапазонов одновременно, где  может быть любым целым числом (например, может быть равно 48 для перемежения по всем 48 поддиапазонам данных).
может быть любым целым числом (например, может быть равно 48 для перемежения по всем 48 поддиапазонам данных).
VI. Калибровка
Для системы ДВР нисходящая и восходящая линии совместно используют одну и ту же частотную полосу в дуплексном режиме с разделением по времени. В этом случае между канальными откликами нисходящей и восходящей линий существует, как правило, высокая степень корреляции. Эта корреляция может быть использована для упрощения оценки канала и пространственной обработки. Для системы ДВР каждый поддиапазон беспроводной линии может предполагаться обратимым. То есть, если  представляет матрицу канальных откликов из антенной решетки
представляет матрицу канальных откликов из антенной решетки  в антенную решетку
в антенную решетку  для поддиапазона
для поддиапазона  , то обратимый канал подразумевает, что связь от решетки
, то обратимый канал подразумевает, что связь от решетки  к решетке
к решетке  задается транспозицией , которая представляет собой
задается транспозицией , которая представляет собой  .
.
Однако отклики (усиление и фаза) цепей передачи и приема в пункте доступа обычно отличаются от откликов цепей передачи и приема в пользовательском терминале. Чтобы найти различие в частотных откликах цепей передачи/приема в пункте доступа и пользовательском терминале и учесть это различие, может выполняться калибровка, чтобы калиброванные отклики нисходящей и восходящей линий могли быть выражены в терминах друг друга. Когда цепи передачи/приема калиброваны и учтены, измерение для одной линии (к примеру, нисходящей) может быть использовано для получения управляющих векторов для другой линии (к примеру, восходящей).
"Эффективные" канальные отклики  и
и  нисходящей и восходящей линий, которые включают в себя отклики соответствующих цепей передачи и приема в пункте доступа и пользовательском терминале, могут быть выражены как:
нисходящей и восходящей линий, которые включают в себя отклики соответствующих цепей передачи и приема в пункте доступа и пользовательском терминале, могут быть выражены как:

где  и
и  являются диагональными матрицами размера
являются диагональными матрицами размера  ×
× с составляющими для комплексных коэффициентов усиления, связанных с цепью передачи и цепью приема, соответственно, для
с составляющими для комплексных коэффициентов усиления, связанных с цепью передачи и цепью приема, соответственно, для  антенн в пункте доступа для поддиапазона
антенн в пункте доступа для поддиапазона  ;
;
 и
и  являются диагональными матрицами размера
являются диагональными матрицами размера  ×
× с составляющими для комплексных коэффициентов усиления, связанных с цепью передачи и цепью приема, соответственно, для
с составляющими для комплексных коэффициентов усиления, связанных с цепью передачи и цепью приема, соответственно, для  антенн в пользовательском терминале для поддиапазона
антенн в пользовательском терминале для поддиапазона  ; и
; и
 является матрицей канальных откликов размером
является матрицей канальных откликов размером  ×
× для нисходящей линии.
для нисходящей линии.
Комбинируя эти два уравнения в наборе (25) уравнений, можно получить следующее соотношение:

Левая часть уравнения (26) представляет "истинно" калиброванный канальный отклик в восходящей линии, а правая часть представляет транспозицию "истинно" калиброванного канального отклика в нисходящей линии. Применение диагональных матриц  и
и  для эффективных канальных откликов нисходящей линии и восходящей линии, соответственно, как показано в уравнении (26), позволяет выразить калиброванные канальные отклики для нисходящей и восходящей линий как транспозиции друг друга. Диагональная матрица
для эффективных канальных откликов нисходящей линии и восходящей линии, соответственно, как показано в уравнении (26), позволяет выразить калиброванные канальные отклики для нисходящей и восходящей линий как транспозиции друг друга. Диагональная матрица  размером
размером  ×
× для пункта доступа является отношением отклика
для пункта доступа является отношением отклика  приемной цепи к отклику
приемной цепи к отклику  передающей цепи (т.е.
передающей цепи (т.е.  ), где это отношение берется на по-элементной основе. Аналогично, диагональная матрица
), где это отношение берется на по-элементной основе. Аналогично, диагональная матрица  размером
размером  ×
× для пользовательского терминала является отношением отклика
для пользовательского терминала является отношением отклика  приемной цепи к отклику
приемной цепи к отклику  передающей цепи.
передающей цепи.
Матрицы  и
и  включают в себя значения, которые могут учитывать различия в цепях передачи/приема в пункте доступа и пользовательском терминале. Это затем позволит выразить канальный отклик для одной линии через канальный отклик для другой линии, как показано в уравнении (26).
включают в себя значения, которые могут учитывать различия в цепях передачи/приема в пункте доступа и пользовательском терминале. Это затем позволит выразить канальный отклик для одной линии через канальный отклик для другой линии, как показано в уравнении (26).
Может быть выполнена калибровка, чтобы найти матрицы  и
и  . Как правило, истинный канальный отклик
. Как правило, истинный канальный отклик  и отклики цепи передачи/приема неизвестны и не могут быть точно или легко установлены. Вместо этого можно оценить эффективные канальные отклики нисходящей и восходящей линий
и отклики цепи передачи/приема неизвестны и не могут быть точно или легко установлены. Вместо этого можно оценить эффективные канальные отклики нисходящей и восходящей линий  и
и  , соответственно, на основании пилот-сигналов, посланных по нисходящей и восходящей линиям, как описано ниже. Оценки матриц
, соответственно, на основании пилот-сигналов, посланных по нисходящей и восходящей линиям, как описано ниже. Оценки матриц  и
и  , которые называются корректировочными матрицами
, которые называются корректировочными матрицами  и
и  , можно затем выделить на основании оценок
, можно затем выделить на основании оценок  и
и  канальных откликов нисходящей и восходящей линий, как описано ниже. Матрицы
канальных откликов нисходящей и восходящей линий, как описано ниже. Матрицы  и
и  включают в себя корректировочные коэффициенты, которые могут учитывать различия в цепях передачи/приема в пункте доступа и пользовательском терминале.
включают в себя корректировочные коэффициенты, которые могут учитывать различия в цепях передачи/приема в пункте доступа и пользовательском терминале.
"Калиброванные" канальные отклики нисходящей и восходящей линий, наблюдаемые пользовательским терминалом и пунктом доступа, соответственно, можно выразить как:

где  и
и  являются выражениями "истинного" калиброванного канального отклика в уравнении (26). Комбинируя два уравнения в наборе (27) уравнений с использованием выражения в уравнении (26), можно показать, что
являются выражениями "истинного" калиброванного канального отклика в уравнении (26). Комбинируя два уравнения в наборе (27) уравнений с использованием выражения в уравнении (26), можно показать, что  ≈
≈ . Точность соотношения
. Точность соотношения  ≈
≈ зависит от точности матриц
зависит от точности матриц  и
и  , которая, в свою очередь, обычно зависит от качества оценок
, которая, в свою очередь, обычно зависит от качества оценок  и
и  канальных откликов нисходящей и восходящей линий.
канальных откликов нисходящей и восходящей линий.
Калибровка может быть выполнена с помощью различных схем. Для ясности, ниже описывается конкретная схема калибровки. Чтобы выполнить калибровку, пользовательский терминал сначала получает синхронизацию и частоту пункта доступа на основании маякового пилот-сигнала, переданного по каналу ВСН. Затем пользовательский терминал посылает сообщение по каналу RACH, чтобы инициировать процедуру калибровки пунктом доступа. Эта калибровка может выполняться параллельно с регистрацией/аутентификацией.
Поскольку частотные отклики цепей передачи/приема в пункте доступа и пользовательском терминале, как правило, равномерные по большей части полосы, представляющей интерес, различия усиления/фазы цепей передачи/приема можно характеризовать малым числом поддиапазонов. Калибровка может выполняться для 4, 8, 16, 48 или какого-нибудь иного числа поддиапазонов, которые можно конкретизировать в сообщении, посланном для инициирования калибровки. Калибровка может также выполняться для пилотных поддиапазонов. Калибровочные постоянные для поддиапазонов, на которых калибровка не выполняется в явном виде, могут быть вычислены интерполяцией на калиброванных поддиапазонах. Для ясности, далее предполагается, что калибровка выполняется для всех поддиапазонов данных.
Для калибровки пункт доступа выделяет пользовательскому терминалу достаточно времени в канале RCH, чтобы послать пилот-сигнал МВхМВых восходящей линии достаточной длительности плюс сообщение. Длительность пилот-сигнала МВхМВых восходящей линии может зависеть от числа поддиапазонов, по которым выполняется калибровка. Например, 8 символов МОРЧ может быть достаточно, если калибровка выполняется для четырех поддиапазонов, а больше (к примеру, 20) символов МОРЧ могут быть необходимы для большего числа поддиапазонов. Полная мощность передачи обычно фиксирована, так что, если пилот-сигнал МВхМВых передается в малом числе поддиапазонов, то более высокие значения мощности передачи можно использовать для каждого из этих поддиапазонов, и отношение С/Ш для каждого поддиапазона высокое. Наоборот, если пилот-сигнал МВхМВых передается в большом числе поддиапазонов, то меньшие значения мощности передачи можно использовать для каждого поддиапазона, и отношение С/Ш для каждого поддиапазона снижается. Если С/Ш каждого поддиапазона недостаточно высокое, то больше символов МОРЧ может быть послано для пилот-сигнала МВхМВых и будет интегрироваться в приемнике для получения более высокого отношения С/Ш для поддиапазона.
Пользовательский терминал затем передает на RCH пилот-сигнал МВхМВых, который используется пунктом доступа для выделения оценки эффективного канального отклика  восходящей линии для каждого из поддиапазонов данных. Оценки канальных откликов восходящей линии квантуются (например, на 12-битовые комплексные значения с синфазной (
восходящей линии для каждого из поддиапазонов данных. Оценки канальных откликов восходящей линии квантуются (например, на 12-битовые комплексные значения с синфазной ( ) и квадратурной (
) и квадратурной ( ) компонентами) и посылаются к пользовательскому терминалу.
) компонентами) и посылаются к пользовательскому терминалу.
Пользовательский терминал также выделяет оценку  эффективного канального отклика нисходящей линии для каждого из поддиапазонов данных на основании пилот-сигнала МВхМВых, посланного на ВСН. По получении эффективных оценок
эффективного канального отклика нисходящей линии для каждого из поддиапазонов данных на основании пилот-сигнала МВхМВых, посланного на ВСН. По получении эффективных оценок  и
и  канальных откликов восходящей и нисходящей линий для всех поддиапазонов данных пользовательский терминал находит корректировочные коэффициенты
канальных откликов восходящей и нисходящей линий для всех поддиапазонов данных пользовательский терминал находит корректировочные коэффициенты  и
и  для каждого из поддиапазонов данных, которые подлежат использованию пунктом доступа и пользовательским терминалом, соответственно. Может быть определен корректировочный вектор
для каждого из поддиапазонов данных, которые подлежат использованию пунктом доступа и пользовательским терминалом, соответственно. Может быть определен корректировочный вектор  , чтобы включить только диагональные элементы
, чтобы включить только диагональные элементы  , и может быть определен корректировочный вектор
, и может быть определен корректировочный вектор  , чтобы включить только диагональные элементы
, чтобы включить только диагональные элементы  .
.
Корректировочные коэффициенты могут быть выделены различными путями, в том числе вычислением отношения матриц и вычислением МСКО. Оба этих способа вычисления более подробно описываются ниже. Также могут использоваться другие способы вычисления, которые входят в объем изобретения.
1. Вычисление отношения матриц
Чтобы найти корректировочные векторы  и
и  , сначала для каждого поддиапазона данных при заданных эффективных оценках
, сначала для каждого поддиапазона данных при заданных эффективных оценках  и
и  канальных откликов восходящей и нисходящей линий вычисляется матрица
канальных откликов восходящей и нисходящей линий вычисляется матрица  размера (
размера ( ), следующим образом:
), следующим образом:

где отношение берется на по-элементной основе. Каждый элемент может, таким образом, вычисляться как:

где  является (
является ( ,
, )-м элементом (строкой столбцом)
)-м элементом (строкой столбцом)  ,
,  является (,)-м элементом , а
является (,)-м элементом , а  является (,)-м элементом .
является (,)-м элементом .
Корректировочный вектор  для пункта доступа далее равен среднему от нормированных строк
для пункта доступа далее равен среднему от нормированных строк  . Каждая строка сначала нормируется путем масштабирования каждого из
. Каждая строка сначала нормируется путем масштабирования каждого из  элементов в строке первым элементом в этой строке. Таким образом, если
элементов в строке первым элементом в этой строке. Таким образом, если  является
является  -й строкой , то нормированная строка
-й строкой , то нормированная строка  может быть выражена как:
может быть выражена как:

Среднее нормированных строк является тогда суммой  нормированных строк, поделенной на , что можно выразить как:
нормированных строк, поделенной на , что можно выразить как:

Вследствие нормировки первый элемент является единицей.
Корректировочный вектор  для пользовательского терминала равен среднему от инверсий нормированных столбцов .
для пользовательского терминала равен среднему от инверсий нормированных столбцов .  -й столбец нормируется первым путем масштабирования каждого элемента в столбце -м элементом вектора , который обозначается как
-й столбец нормируется первым путем масштабирования каждого элемента в столбце -м элементом вектора , который обозначается как  . Таким образом, если
. Таким образом, если  является -м столбцом , то нормированный столбец
является -м столбцом , то нормированный столбец  может быть выражен как:
может быть выражен как:

Среднее от инверсий нормированных столбцов является тогда суммой инверсий  нормированных строк, поделенной на , что можно выразить как:
нормированных строк, поделенной на , что можно выразить как:

где инверсия  от нормированных столбцов выполняется поэлементно.
от нормированных столбцов выполняется поэлементно.
2. Вычисление МСКО
Для вычисления МСКО корректировочные коэффициенты  и
и  выделяются из эффективных оценок
выделяются из эффективных оценок  и
и  канальных откликов восходящей и нисходящей линий, так что среднеквадратичная ошибка (СКО) (MSE) между калиброванным канальным откликом нисходящей линии и калиброванным канальным откликом восходящей линии минимизируется. Это условие можно выразить как:
канальных откликов восходящей и нисходящей линий, так что среднеквадратичная ошибка (СКО) (MSE) между калиброванным канальным откликом нисходящей линии и калиброванным канальным откликом восходящей линии минимизируется. Это условие можно выразить как:

которое можно также записать как:

где  =
= , поскольку является диагональной матрицей.
, поскольку является диагональной матрицей.
Для уравнение (34) имеет место ограничение, согласно которому ведущий элемент  устанавливается на единицу (т.е.
устанавливается на единицу (т.е.  =1). Без этого ограничения будет получено тривиальное решение со всеми элементами матриц
=1). Без этого ограничения будет получено тривиальное решение со всеми элементами матриц  и
и  ), установленными на нуль. В уравнении (34) матрица
), установленными на нуль. В уравнении (34) матрица  получается как
получается как  . Квадрат абсолютного значения получается затем для каждой из
. Квадрат абсолютного значения получается затем для каждой из  ·
· составляющих матрицы
составляющих матрицы  . Среднеквадратичная ошибка (или квадрат ошибки, поскольку деление · на опускается) равна тогда сумме всех · квадратных значений.
. Среднеквадратичная ошибка (или квадрат ошибки, поскольку деление · на опускается) равна тогда сумме всех · квадратных значений.
Вычисление МСКО выполняется для каждого назначенного поддиапазона, чтобы получить корректировочные коэффициенты  и
и  для поддиапазона. Вычисление МСКО для одного поддиапазона описывается ниже. Для простоты, индекс
для поддиапазона. Вычисление МСКО для одного поддиапазона описывается ниже. Для простоты, индекс  поддиапазона опускается в нижеследующем описании. Также для простоты, элементы оценки
поддиапазона опускается в нижеследующем описании. Также для простоты, элементы оценки  нисходящей линии обозначаются как {
нисходящей линии обозначаются как { }, элементы оценки
}, элементы оценки  восходящей линии обозначаются как {
восходящей линии обозначаются как { }, диагональные элементы матрицы
}, диагональные элементы матрицы  обозначаются как {
обозначаются как { }, а диагональные элементы матрицы
}, а диагональные элементы матрицы  обозначаются как {
обозначаются как { }, где
}, где  ={1 …
={1 …  } и
} и  ={1 …
={1 …  }.
}.
Среднеквадратичная ошибка может быть переписана из уравнения (34) следующим образом:

вновь имеет место ограничение  =1. Минимальная среднеквадратичная оценка может быть получена взятием частичных производных от уравнения (35) по
=1. Минимальная среднеквадратичная оценка может быть получена взятием частичных производных от уравнения (35) по  и
и  и установкой этих частичных производных на нуль. Результатами этих операций являются следующие наборы уравнений:
и установкой этих частичных производных на нуль. Результатами этих операций являются следующие наборы уравнений:
В уравнении (36а) =1, так что для этого случая нет частной производной и индекс  изменяется от 2 до .
изменяется от 2 до .
Набор из (+-1) уравнений в наборе уравнений (36а) и (36b) может быть более традиционно выражен в матричной форме следующим образом:

где
Матрица  включает в себя (+-1) строк, причем первые -1 строк соответствуют -1 уравнениям из набора (36а) уравнений, а последние строк соответствуют уравнениям из набора (36b) уравнений. В частности, первая строка матрицы
включает в себя (+-1) строк, причем первые -1 строк соответствуют -1 уравнениям из набора (36а) уравнений, а последние строк соответствуют уравнениям из набора (36b) уравнений. В частности, первая строка матрицы  генерируется из набора (36а) уравнений при
генерируется из набора (36а) уравнений при  =2, вторая строка генерируется при =3, и т.д. -я строка матрицы
=2, вторая строка генерируется при =3, и т.д. -я строка матрицы  генерируется из набора (36b) уравнений при
генерируется из набора (36b) уравнений при  =1, и т.д., а последняя строка генерируется при
=1, и т.д., а последняя строка генерируется при  =
= . Как показано выше, составляющие матрицы и составляющие вектора
. Как показано выше, составляющие матрицы и составляющие вектора  могут быть получены на основании составляющих матриц
могут быть получены на основании составляющих матриц  и
и  .
.
Корректировочные коэффициенты включаются в вектор  , который можно получить как:
, который можно получить как:

Результатами вычисления МСКО являются корректировочные матрицы  и
и  , которые минимизируют среднеквадратичную ошибку в калиброванных канальных откликах нисходящей и восходящей линий, как показано в уравнении (34). Поскольку матрицы и
, которые минимизируют среднеквадратичную ошибку в калиброванных канальных откликах нисходящей и восходящей линий, как показано в уравнении (34). Поскольку матрицы и  получены на основании оценок
получены на основании оценок  и
и  канальных откликов восходящей и нисходящей линий, качество корректировочных матриц
канальных откликов восходящей и нисходящей линий, качество корректировочных матриц  и , таким образом, зависит от качества канальных оценок
и , таким образом, зависит от качества канальных оценок  и
и  . Пилот-сигнал МВхМВых может усредняться в приемнике, чтобы получить более точные оценки для
. Пилот-сигнал МВхМВых может усредняться в приемнике, чтобы получить более точные оценки для  и .
и .
Корректировочные матрицы и , полученные на основании вычисления МСКО, в общем лучше, чем корректировочные матрицы, полученные на основании вычисления отношения матриц. Это особенно правильно, когда некоторые из канальных коэффициентов усиления малы, и измеренный шум может сильно ухудшить канальные коэффициенты усиления.
3. Последующее вычисление
Пара корректировочных векторов  и
и  может быть найдена для каждого из поддиапазонов данных. Поскольку смежные поддиапазоны вероятнее всего коррелированы, вычисление можно упростить. Например, вычисление можно выполнять для каждого
может быть найдена для каждого из поддиапазонов данных. Поскольку смежные поддиапазоны вероятнее всего коррелированы, вычисление можно упростить. Например, вычисление можно выполнять для каждого  -го поддиапазона вместо каждого поддиапазона, где может быть найдено через ожидаемый отклик цепей передачи/приема. Если калибровка выполняется для менее чем всех поддиапазонов данных и пилот-сигналов, то корректировочные коэффициенты для "некалиброванных" поддиапазонов могут быть получены интерполяцией корректировочных коэффициентов, полученных для "калиброванных" поддиапазонов.
-го поддиапазона вместо каждого поддиапазона, где может быть найдено через ожидаемый отклик цепей передачи/приема. Если калибровка выполняется для менее чем всех поддиапазонов данных и пилот-сигналов, то корректировочные коэффициенты для "некалиброванных" поддиапазонов могут быть получены интерполяцией корректировочных коэффициентов, полученных для "калиброванных" поддиапазонов.
Различные иные схемы калибровки могут также использоваться для выделения корректировочных векторов и для пункта доступа и пользовательского терминала, соответственно. Однако описанная выше схема позволяет получить "совместимые" корректировочные векторы для пункта доступа, когда калибровка выполняется различными пользовательскими терминалами.
После такого получения пользовательский терминал посылает корректировочные векторы для всех поддиапазонов данных назад в пункт доступа. Если пункт доступа уже откалиброван (к примеру, другими пользовательскими терминалами), то текущие корректировочные векторы обновляются вновь принятыми корректировочными векторами. Таким образом, если пункт доступа использует корректировочные векторы  для передачи пилот-сигнал МВхМВых, из которого пользовательский терминал находит новые корректировочные векторы
для передачи пилот-сигнал МВхМВых, из которого пользовательский терминал находит новые корректировочные векторы  , тогда обновленные корректировочные векторы являются произведением текущего и нового корректировочных векторов, т.е.
, тогда обновленные корректировочные векторы являются произведением текущего и нового корректировочных векторов, т.е.  =·, где перемножение осуществляется на по-элементной основе. Обновленные корректировочные векторы могут затем использоваться пунктом доступа до тех пор, пока они не будут снова обновлены.
=·, где перемножение осуществляется на по-элементной основе. Обновленные корректировочные векторы могут затем использоваться пунктом доступа до тех пор, пока они не будут снова обновлены.
Корректировочные векторы и могут быть получены тем же самым или иными пользовательскими терминалами. В одном варианте осуществления обновленные корректировочные векторы определяются как =·, где перемножение осуществляется на по-элементной основе. В другом варианте осуществления обновленные корректировочные векторы могут быть определены повторно как =· , где α является коэффициентом, используемым для обеспечения взвешенного усреднения (т.е. 0<α<1). Если обновления калибровки нечасты, то α близкий к единице, может обеспечивать лучший результат. Если обновления калибровки часты, но зашумлены, то лучшим будем меньшее значение для α. Обновленные корректировочные векторы могут затем использоваться пунктом доступа до тех пор, пока они не будут снова обновлены.
, где α является коэффициентом, используемым для обеспечения взвешенного усреднения (т.е. 0<α<1). Если обновления калибровки нечасты, то α близкий к единице, может обеспечивать лучший результат. Если обновления калибровки часты, но зашумлены, то лучшим будем меньшее значение для α. Обновленные корректировочные векторы могут затем использоваться пунктом доступа до тех пор, пока они не будут снова обновлены.
Пункт доступа и пользовательский терминал используют свои соответствующие корректировочные векторы и или соответствующие корректировочные матрицы  и
и  , для
, для  ∈
∈ , чтобы масштабировать символы перед передачей, как описано ниже. Калиброванные каналы нисходящей и восходящей линий, которые наблюдают пользовательский терминал и пункт доступа, показаны в уравнении (27).
, чтобы масштабировать символы перед передачей, как описано ниже. Калиброванные каналы нисходящей и восходящей линий, которые наблюдают пользовательский терминал и пункт доступа, показаны в уравнении (27).
VII. Пространственная обработка
Пространственная обработка в пункте доступа и пользовательском терминале может быть упрощена для системы ДВР после того, как выполнена калибровка, чтобы вычислять различие в цепях передачи/приема. Как отмечено выше, калиброванный канальный отклик нисходящей линии равен  =
= . Калибровочный канальный отклик восходящей линии равен
. Калибровочный канальный отклик восходящей линии равен  =
= ≈
≈ .
.
1. Пространственная обработка восходящей линии
Декомпозиция по сингулярным значениям матрицы калиброванных канальных откликов восходящей линии может быть выражена как:

где  является единичной матрицей размера (×) левых собственных векторов
является единичной матрицей размера (×) левых собственных векторов  ;
;
 диагональной матрицей размера (×
диагональной матрицей размера (× ) сингулярных значений ; и
) сингулярных значений ; и
 является единичной матрицей размера (×) правых собственных векторов .
является единичной матрицей размера (×) правых собственных векторов .
Соответственно, декомпозиция по сингулярным значениям матрицы  калиброванных канальных откликов восходящей линии может быть выражена как:
калиброванных канальных откликов восходящей линии может быть выражена как:

Матрицы  и
и  являются также матрицами левых и правых собственных векторов, соответственно, . Как показано в уравнениях (39) и (40) и основано на вышеприведенном описании, матрицы левых и правых собственных векторов для одной линии являются комплексно сопряженными матрицами правых и левых собственных векторов, соответственно, для другой линии. Матрицы
являются также матрицами левых и правых собственных векторов, соответственно, . Как показано в уравнениях (39) и (40) и основано на вышеприведенном описании, матрицы левых и правых собственных векторов для одной линии являются комплексно сопряженными матрицами правых и левых собственных векторов, соответственно, для другой линии. Матрицы  , ,
, ,  и
и  являются различными формами матрицы , а матрицы
являются различными формами матрицы , а матрицы  ,
,  ,
,  и
и  являются также различными формами матрицы . Для простоты, ссылка на матрицы
являются также различными формами матрицы . Для простоты, ссылка на матрицы  и в нижеследующем описании может также относиться к их различным иным формам. Матрицы и используются пунктом доступа и пользовательским терминалом, соответственно, для пространственной обработки и обозначаются как таковые своими подстрочными индексами. Собственные векторы часто также называются "управляющими" векторами.
и в нижеследующем описании может также относиться к их различным иным формам. Матрицы и используются пунктом доступа и пользовательским терминалом, соответственно, для пространственной обработки и обозначаются как таковые своими подстрочными индексами. Собственные векторы часто также называются "управляющими" векторами.
Пользовательский терминал может оценивать калиброванные канальные отклики нисходящей линии на основании пилот-сигнала МВхМВых, посланного пунктом доступа. Пользовательский терминал может затем выполнять декомпозицию по сингулярным значениям оценки  калиброванных канальных откликов нисходящей линии, для ∈
калиброванных канальных откликов нисходящей линии, для ∈ , чтобы получить диагональную матрицу
, чтобы получить диагональную матрицу  и матрицу левых собственных векторов
и матрицу левых собственных векторов  . Эта декомпозиция по сингулярным значениям может быть задана как =
. Эта декомпозиция по сингулярным значениям может быть задана как =
 , где символ ("^") над каждой матрицей указывает, что это оценка действительной матрицы.
, где символ ("^") над каждой матрицей указывает, что это оценка действительной матрицы.
Аналогично, пункт доступа может оценивать калиброванные канальные отклики восходящей линии на основании пилот-сигнала МВхМВых, посланного пользовательским терминалом. Пункт доступа может затем выполнять декомпозицию по сингулярным значениям для оценки  калиброванных канальных откликов восходящей линии, для
калиброванных канальных откликов восходящей линии, для  ∈
∈ , чтобы получить диагональную матрицу
, чтобы получить диагональную матрицу  и матрицу
и матрицу  левых собственных векторов . Эта декомпозиция по сингулярным значениям может быть задана как =
левых собственных векторов . Эта декомпозиция по сингулярным значениям может быть задана как =
 .
.
Матрица  размера (
размера ( ×) может быть определена как:
×) может быть определена как:

Пользовательский терминал, когда он активен поддерживает действующую оценку калиброванного канала нисходящей линии и матрицы  левых собственных векторов , которые используются для обновления матрицы .
левых собственных векторов , которые используются для обновления матрицы .
Пользовательский терминал использует матрицу для пространственной обработки для режимов управления лучом и пространственного мультиплексирования. Для режима пространственного мультиплексирования вектор  передачи для каждого поддиапазона может быть выражен как:
передачи для каждого поддиапазона может быть выражен как:

где  является вектором данных, содержащим до
является вектором данных, содержащим до  символов, подлежащих передаче на собственных режимах поддиапазона
символов, подлежащих передаче на собственных режимах поддиапазона  ;
;
 заменяет
заменяет  в уравнении (15), а масштабирование сигнала, посредством
в уравнении (15), а масштабирование сигнала, посредством  для реализации инверсии каналов, для простоты, опускается в уравнении (42); и
для реализации инверсии каналов, для простоты, опускается в уравнении (42); и
является вектором передачи для восходящей линии для поддиапазона .
В пункте доступа принятый вектор  для передачи восходящей линии можно выразить как:
для передачи восходящей линии можно выразить как:
где  является принятым вектором для поддиапазона восходящей линии; и
является принятым вектором для поддиапазона восходящей линии; и
 является аддитивным белым Гауссовским шумом (АБГШ) для поддиапазона .
является аддитивным белым Гауссовским шумом (АБГШ) для поддиапазона .
Уравнение (43) использует следующие соотношения:  и =
и =

 . Как показано в уравнении (43), в пункте доступа принятая передача восходящей линии преобразуется посредством:
. Как показано в уравнении (43), в пункте доступа принятая передача восходящей линии преобразуется посредством: 
 , что является матрицей
, что является матрицей  левых собственных векторов
левых собственных векторов  , масштабированной диагональной матрицей
, масштабированной диагональной матрицей  сингулярных величин.
сингулярных величин.
Пользовательский терминал передает управляемый эталон по восходящей линии с использованием матрицы  . Управляемый эталон является передачей пилот-сигнала на одной широкополосной собственной моде с использованием управления лучом или формирования луча, и более подробно описан ниже. В пункте доступа принятый управляемый эталон восходящей линии (в отсутствие шума) приблизительно равен
. Управляемый эталон является передачей пилот-сигнала на одной широкополосной собственной моде с использованием управления лучом или формирования луча, и более подробно описан ниже. В пункте доступа принятый управляемый эталон восходящей линии (в отсутствие шума) приблизительно равен 
 . Пункт доступа может затем получить оценку единичной матрицы и диагональной матрицы
. Пункт доступа может затем получить оценку единичной матрицы и диагональной матрицы  на основании управляемого эталона, посланного пользовательским терминалом. Различные методы оценки могут использоваться для получения оценки единичной и диагональной матриц.
на основании управляемого эталона, посланного пользовательским терминалом. Различные методы оценки могут использоваться для получения оценки единичной и диагональной матриц.
В одном варианте осуществления, чтобы получить оценку , принятый вектор  для управляемого эталона для поддиапазона
для управляемого эталона для поддиапазона  широкополосной собственной моды
широкополосной собственной моды  сначала умножается на комплексно сопряженное от символа
сначала умножается на комплексно сопряженное от символа  пилот-сигнала МОРЧ, посланного в качестве управляемого эталона. Генерирование управляемого эталона и символа пилот-сигнала МОРЧ более подробно описано ниже. Результат затем интегрируется по множеству принятых управляемых эталонных символов для каждой широкополосной собственной моды, чтобы получить оценку
пилот-сигнала МОРЧ, посланного в качестве управляемого эталона. Генерирование управляемого эталона и символа пилот-сигнала МОРЧ более подробно описано ниже. Результат затем интегрируется по множеству принятых управляемых эталонных символов для каждой широкополосной собственной моды, чтобы получить оценку 
 , которая масштабируется левым собственным вектором
, которая масштабируется левым собственным вектором  для широкополосной собственной моды . Поскольку собственные векторы имеют единичную мощность, сингулярные значения (или
для широкополосной собственной моды . Поскольку собственные векторы имеют единичную мощность, сингулярные значения (или  ) в
) в  могут быть оценены на основании принятой мощности управляемого эталона, которую можно измерить для каждого поддиапазона каждой широкополосной собственной моды.
могут быть оценены на основании принятой мощности управляемого эталона, которую можно измерить для каждого поддиапазона каждой широкополосной собственной моды.
В другом варианте осуществления используется метод МСКО, чтобы получить оценку на основании принятого вектора для управляемого эталона.
Управляемый эталон может быть передан для одной широкополосной собственной моды в любом заданном символьном периоде и, в свою очередь, может использоваться для получения оценки одного собственного вектора для каждого поддиапазона этой широкополосной собственной моды. Таким образом, приемник способен получить оценку одного собственного вектора в единичной матрице для любого заданного символьного периода. Поскольку оценки множества собственных векторов для единичной матрицы получаются по разным символьным периодам, и из-за шума и других источников ухудшения в трассе передачи, оцененные собственные векторы для единичной матрицы, вероятно, не ортогональны. Если оцененные собственные векторы после этого используются для пространственной обработки передачи данных в другой линии, то любые ошибки в ортогональности в этих оцененных собственных векторах приведут к перекрестным помехам для собственных векторов, что может ухудшить функционирование.
В варианте осуществления оцененные собственные векторы для каждой единичной матрицы принудительно делают ортогональными друг другу. Эта ортогонализация собственных векторов может быть достигнута с использованием разных методов, таких как разложение на множители  , вычисление минимальной квадратичной ошибки, полярная декомпозиция и т.д. Разложение на множители
, вычисление минимальной квадратичной ошибки, полярная декомпозиция и т.д. Разложение на множители  осуществляет декомпозицию матрицы
осуществляет декомпозицию матрицы  (с неортогональными столбцами) в ортогональную матрицу
(с неортогональными столбцами) в ортогональную матрицу  и верхнюю треугольную матрицу
и верхнюю треугольную матрицу  . Матрица образует ортогональный базис для столбцов
. Матрица образует ортогональный базис для столбцов  . Диагональные элементы
. Диагональные элементы  задают длину компонентов в столбцах
задают длину компонентов в столбцах  в направлениях соответствующих столбцов . Матрица
в направлениях соответствующих столбцов . Матрица  может использоваться для пространственной обработки по нисходящей линии. Матрицы и
может использоваться для пространственной обработки по нисходящей линии. Матрицы и  могут использоваться для получения матрицы улучшенного согласованного фильтра для восходящей линии. Разложение на множители
могут использоваться для получения матрицы улучшенного согласованного фильтра для восходящей линии. Разложение на множители  может выполняться разными способами, в том числе процедурой Грам-Шмидта, вспомогательным преобразованием и т.д.
может выполняться разными способами, в том числе процедурой Грам-Шмидта, вспомогательным преобразованием и т.д.
Другие методы для оценивания единичной и диагональной матриц на основании управляемого эталона также можно использовать, и они входят в объем изобретения.
Пункт доступа может, таким образом, оценивать как , так и на основании управляемого эталона, переданного пользовательским терминалом, без необходимости выполнять декомпозицию по сингулярным значениям над .
Нормированная матрица  согласованного фильтра для передачи восходящей линии от пользовательского терминала может быть выражена как:
согласованного фильтра для передачи восходящей линии от пользовательского терминала может быть выражена как:

Согласованная фильтрация в пункте доступа для передачи восходящей линии далее может быть выражена как:

где  является оценкой вектора символов
является оценкой вектора символов  модуляции, переданных пользовательским терминалом для режима пространственного мультиплексирования. Для режима управления лучом только одна строка матрицы используется для обеспечения одной оценки
модуляции, переданных пользовательским терминалом для режима пространственного мультиплексирования. Для режима управления лучом только одна строка матрицы используется для обеспечения одной оценки  символа собственной моды, используемой для передачи данных.
символа собственной моды, используемой для передачи данных.
2. Пространственная обработка нисходящей линии
Для нисходящей линии пункт доступа использует матрицу  размера (
размера ( ×) для пространственной обработки. Эту матрицу можно выразить как:
×) для пространственной обработки. Эту матрицу можно выразить как:

Корректировочная матрица выводится пользовательским терминалом и передается назад в пункт доступа во время калибровки. Матрица может быть получена на основании управляемого эталона, переданного по восходящей линии пользовательским терминалом.
Для режима пространственного мультиплексирования вектор  передачи для каждого поддиапазона может быть выражен как:
передачи для каждого поддиапазона может быть выражен как:

где является вектором передачи,  является вектором данных для нисходящей линии, а масштабирование сигнала посредством
является вектором данных для нисходящей линии, а масштабирование сигнала посредством  для достижения инверсии каналов, для простоты, опускается в уравнении (47).
для достижения инверсии каналов, для простоты, опускается в уравнении (47).
В пользовательском терминале принятый вектор  для передачи нисходящей линии может быть выражен как:
для передачи нисходящей линии может быть выражен как:
Как показано в уравнении (48), в пользовательском терминале принятая передача по нисходящей линии преобразуется посредством  , которое является матрицей
, которое является матрицей  левых собственных векторов
левых собственных векторов  , масштабированной диагональной матрицей сингулярных величин.
, масштабированной диагональной матрицей сингулярных величин.
Нормированная матрица  согласованного фильтра для передачи по нисходящей линии от пункта доступа может быть выражена как:
согласованного фильтра для передачи по нисходящей линии от пункта доступа может быть выражена как:

Диагональная матрица и матрица левых собственных векторов могут быть выведены пользовательским терминалом посредством выполнения декомпозиции по сингулярным значениям над оценкой калиброванных канальных откликов нисходящей линии, как описано выше.
Согласованная фильтрация в пользовательском терминале для передачи по нисходящей линии далее может быть выражена как:

3. Пространственная обработка пункта доступа и пользовательского терминала
Вследствие обратимости канала для системы ДВР и калибровки, пространственная обработка как в пункте доступа, так и в пользовательском терминале может быть упрощена. Таблица 32 подытоживает пространственную обработку в пункте доступа и пользовательском терминале для передачи и приема данных.




Пространственная обработка для приема данных обычно также называется согласованной фильтрацией.
Из-за обратимого канала является матрицей правых собственных векторов  (для передачи) и левых собственных векторов (для приема) для пользовательского терминала. Аналогично,
(для передачи) и левых собственных векторов (для приема) для пользовательского терминала. Аналогично,  является как матрицей правых собственных векторов
является как матрицей правых собственных векторов  (для передачи) и левых собственных векторов
(для передачи) и левых собственных векторов  (для приема) для пункта доступа. Декомпозицию по сингулярным значениям необходимо выполнять пользовательским терминалом для оценки
(для приема) для пункта доступа. Декомпозицию по сингулярным значениям необходимо выполнять пользовательским терминалом для оценки  калиброванных канальных откликов нисходящей линии, чтобы получить
калиброванных канальных откликов нисходящей линии, чтобы получить  и
и  . Пункт доступа может выводить
. Пункт доступа может выводить  и на основании управляемого эталона, переданного пользовательским терминалом, и не нуждается в выполнении декомпозиции по сингулярным значениям над оценкой канальных откликов восходящей линии. Пункт доступа и пользовательский терминал могут иметь разные варианты матрицы
и на основании управляемого эталона, переданного пользовательским терминалом, и не нуждается в выполнении декомпозиции по сингулярным значениям над оценкой канальных откликов восходящей линии. Пункт доступа и пользовательский терминал могут иметь разные варианты матрицы  вследствие различных средств, используемых пунктом доступа и пользовательским терминалом, чтобы получить . Кроме того, матрица
вследствие различных средств, используемых пунктом доступа и пользовательским терминалом, чтобы получить . Кроме того, матрица  , полученная пунктом доступа на основании управляемого эталона, как правило, отличается от матрицы
, полученная пунктом доступа на основании управляемого эталона, как правило, отличается от матрицы  , полученной пользовательским терминалом с использованием декомпозиции по сингулярным значениям. Для простоты, эти различия не показаны в вышеприведенном выводе.
, полученной пользовательским терминалом с использованием декомпозиции по сингулярным значениям. Для простоты, эти различия не показаны в вышеприведенном выводе.
4. Управление лучом
Для некоторых канальных условий лучше передавать данные только на одной широкополосной собственной моде, как правило, лучшей или главной широкополосной собственной моде. Это может быть в случае, если отношения С/Ш в принятом сигнале для всех других широкополосных собственных мод достаточно плохие, так что улучшенные показатели достигаются за счет использования всей доступной мощности передачи на главной широкополосной собственной моде.
Передача данных на одной широкополосной собственной моде может быть реализована с использованием формирования луча или управления лучом. Для формирования луча символы модуляции пространственно обрабатываются собственными векторами  или
или  , для
, для  ∈
∈ , для главной широкополосной собственной моды (т.е. первый столбец
, для главной широкополосной собственной моды (т.е. первый столбец  или
или  после упорядочивания). Для управления лучом символы модуляции пространственно обрабатываются набором "нормированных" (или "насыщенных") собственных векторов
после упорядочивания). Для управления лучом символы модуляции пространственно обрабатываются набором "нормированных" (или "насыщенных") собственных векторов  или
или  , для
, для  ∈, для главной широкополосной собственной моды. Для ясности, управление лучом описывается ниже для восходящей линии.
∈, для главной широкополосной собственной моды. Для ясности, управление лучом описывается ниже для восходящей линии.
Для восходящей линии элементы каждого собственного вектора  , для
, для  ∈, для главной широкополосной собственной моды могут иметь разные величины. Таким образом, предварительно преобразованные символы для каждого поддиапазона, которые получаются перемножением символа модуляции для поддипазона
∈, для главной широкополосной собственной моды могут иметь разные величины. Таким образом, предварительно преобразованные символы для каждого поддиапазона, которые получаются перемножением символа модуляции для поддипазона  с элементами собственного вектора для поддиапазона
с элементами собственного вектора для поддиапазона  , могут тогда иметь разные величины. Следовательно, векторы передачи на каждую антенну, каждый из которых включает в себя предварительно преобразованные символы для всех поддиапазонов данных для заданной передающей антенны, могут иметь разные величины. Если мощность передачи для каждой передающей антенны ограничена (к примеру, из-за ограничений усилителей мощности), тогда управление лучом может не полностью использовать полную мощность, доступную для каждой антенны.
, могут тогда иметь разные величины. Следовательно, векторы передачи на каждую антенну, каждый из которых включает в себя предварительно преобразованные символы для всех поддиапазонов данных для заданной передающей антенны, могут иметь разные величины. Если мощность передачи для каждой передающей антенны ограничена (к примеру, из-за ограничений усилителей мощности), тогда управление лучом может не полностью использовать полную мощность, доступную для каждой антенны.
Управление лучом использует только фазовую информацию из собственных векторов , для  ∈, для главной широкополосной собственной моды и нормирует каждый собственный вектор так, что все элементы в собственном векторе имеют равные величины. Нормированный собственный вектор
∈, для главной широкополосной собственной моды и нормирует каждый собственный вектор так, что все элементы в собственном векторе имеют равные величины. Нормированный собственный вектор  для поддиапазона может быть выражен как:
для поддиапазона может быть выражен как:

где  является постоянной (например, =1); и
является постоянной (например, =1); и
 является фазой для поддиапазона передающей антенны
является фазой для поддиапазона передающей антенны  , которая задается как:
, которая задается как:

как показано в уравнении (52), фаза каждого элемента в векторе получается из соответствующего элемента собственного вектора (т.е. получается из  , где =[
, где =[
 …
…  ]
] ).
).
5. Управление лучом восходящей линии
Пространственная обработка пользовательским терминалом для управления лучом в восходящей линии может быть выражена как:

где  является символом модуляции, подлежащим передаче в поддиапазоне ; и
является символом модуляции, подлежащим передаче в поддиапазоне ; и
 является вектором передачи для поддиапазона для управления лучом.
является вектором передачи для поддиапазона для управления лучом.
Как показано в уравнении (53),  элементов нормированного управляющего вектора для каждого поддиапазона имеют одинаковую величину, но, возможно, разные фазы. Таким образом, управление лучом генерирует один вектор передачи для каждого поддиапазона с элементами , имеющими одну и ту же величину, но, возможно, разные фазы.
элементов нормированного управляющего вектора для каждого поддиапазона имеют одинаковую величину, но, возможно, разные фазы. Таким образом, управление лучом генерирует один вектор передачи для каждого поддиапазона с элементами , имеющими одну и ту же величину, но, возможно, разные фазы.
Принятая передача по восходящей линии в пункте доступа для управления лучом может быть выражена как:
где  является принятым вектором для восходящей линии для поддиапазона для управления лучом.
является принятым вектором для восходящей линии для поддиапазона для управления лучом.
Вектор-строка  согласованного фильтра для передачи по восходящей линии с использованием управления лучом может быть выражен как:
согласованного фильтра для передачи по восходящей линии с использованием управления лучом может быть выражен как:

Вектор согласованного фильтра можно получить как описано ниже. Пространственная обработка (или согласованная фильтрация) в пункте доступа для принятой передачи восходящей линии с управлением лучом может быть выражена как:

где  (т.е.
(т.е.  является внутренним произведением
является внутренним произведением  и ее сопряженной транспозиции),
и ее сопряженной транспозиции),
 является оценкой символа
является оценкой символа  модуляции, переданного пользовательским терминалом по восходящей линии, и
модуляции, переданного пользовательским терминалом по восходящей линии, и
 является шумом после обработки.
является шумом после обработки.
6. Управление лучом нисходящей линии
Пространственная обработка пунктом доступа для управления лучом в нисходящей линии может быть выражена как:

где  является нормированным собственным вектором для поддиапазона
является нормированным собственным вектором для поддиапазона  , который генерируется на основе собственного вектора
, который генерируется на основе собственного вектора  для главной широкополосной собственной моды, аналогично тому, как описано выше для восходящей линии.
для главной широкополосной собственной моды, аналогично тому, как описано выше для восходящей линии.
Вектор-строка  согласованного фильтра для передачи по нисходящей линии с использованием управления лучом может быть выражен как:
согласованного фильтра для передачи по нисходящей линии с использованием управления лучом может быть выражен как:

Пространственная обработка (или согласованная фильтрация) в пользовательском терминале для принятой передачи нисходящей линии может быть выражена как:

где  (т.е.
(т.е.  является внутренним произведением и ее сопряженной транспозиции).
является внутренним произведением и ее сопряженной транспозиции).
7. Пространственная обработка с инверсией каналов
Для восходящей линии вектор  передачи для режима пространственного мультиплексирования может быть получен пользовательским терминалом как:
передачи для режима пространственного мультиплексирования может быть получен пользовательским терминалом как:

где  является диагональной матрицей коэффициентов усиления для инверсии каналов, описанной выше. Уравнение (60) аналогично уравнению (15) за исключением того, что вместо
является диагональной матрицей коэффициентов усиления для инверсии каналов, описанной выше. Уравнение (60) аналогично уравнению (15) за исключением того, что вместо  используется
используется 
 . Элементы
. Элементы 
 подаются на перемножители 952 в формирователях 950 луча на фиг.9В.
подаются на перемножители 952 в формирователях 950 луча на фиг.9В.
Для восходящей линии вектор  передачи для режима управления лучом может быть получен пользовательским терминалом как:
передачи для режима управления лучом может быть получен пользовательским терминалом как:

где  является вектором с четырьмя элементами, имеющими равную величину, но фазы, полученные на основании собственного вектора
является вектором с четырьмя элементами, имеющими равную величину, но фазы, полученные на основании собственного вектора  для главной собственной моды. Вектор
для главной собственной моды. Вектор  может быть получен аналогично тому, как это показано выше в уравнениях (16) и (17). Усиление
может быть получен аналогично тому, как это показано выше в уравнениях (16) и (17). Усиление  реализует инверсию каналов и может быть получено аналогично тому, как показано выше в уравнениях (18)-(20), за исключением того, что
реализует инверсию каналов и может быть получено аналогично тому, как показано выше в уравнениях (18)-(20), за исключением того, что  используется для уравнения (20). Элементы
используется для уравнения (20). Элементы  подаются на перемножители 1052 в блоке 1050 управления лучом на фиг.10В.
подаются на перемножители 1052 в блоке 1050 управления лучом на фиг.10В.
Для нисходящей линии вектор  передачи для режима пространственного мультиплексирования может быть получен пользовательским терминалом как:
передачи для режима пространственного мультиплексирования может быть получен пользовательским терминалом как:

Уравнение (62) аналогично уравнению (15) за исключением того, что вместо  используется
используется 
 . Элементы
. Элементы
 подаются на перемножители 952 в формирователях 950 луча на фиг.9В.
подаются на перемножители 952 в формирователях 950 луча на фиг.9В.
Для нисходящей линии вектор  передачи для режима управления лучом может быть получен пользовательским терминалом как:
передачи для режима управления лучом может быть получен пользовательским терминалом как:

где  является вектором с четырьмя элементами, имеющими равную величину, но фазы, полученные на основании собственного вектора
является вектором с четырьмя элементами, имеющими равную величину, но фазы, полученные на основании собственного вектора  для главной собственной моды. Усиление реализует инверсию каналов и может быть получено аналогично тому, как показано выше в уравнениях (18)-(20), за исключением того, что
для главной собственной моды. Усиление реализует инверсию каналов и может быть получено аналогично тому, как показано выше в уравнениях (18)-(20), за исключением того, что  используется для уравнения (20). Элементы подаются на перемножители 1052 в блоке 1050 управления лучом на фиг.10В.
используется для уравнения (20). Элементы подаются на перемножители 1052 в блоке 1050 управления лучом на фиг.10В.
VIII. Структура пилот-сигнала
Структура пилот-сигнала обеспечивается системой БЛВС МВхМВых, чтобы позволить пунктам доступа и пользовательским терминалам выполнять синхронизацию и получение частоты, оценку каналов и иные функции, необходимые для должной работы системы. Таблица 33 перечисляет четыре типа пилот-сигнала и их описание для примерной структуры пилот-сигнала. Меньшее число, дополнительные и (или) отличные транспортные каналы могут также быть определены для использования в структуре пилот-сигнала.
Типы пилот-сигналов
Управляемый эталон и управляемый пилот-сигнал являются синонимическими выражениями.
В варианте осуществления структура пилот-сигнала включает в себя (1) для нисходящей линии - маяковый пилот-сигнал, пилот-сигнал МВхМВых, управляемый эталон и пилот-сигнал несущей, передаваемый пунктом доступа, и (2) для восходящей линии - пилот-сигнал МВхМВых, управляемый эталон и пилот-сигнал несущей, передаваемый пользовательским терминалом.
Маяковый пилот-сигнал нисходящей линии и пилот-сигнал МВхМВых посылаются по каналу ВСН (как показано на фиг.5А) в каждом кадре ДВР. Маяковый пилот-сигнал может использоваться пользовательскими терминалами для синхронизации и получения частоты и оценки доплеровского сдвига. Пилот-сигнал МВхМВых может использоваться пользовательскими терминалами, чтобы (1) получать оценку канала МВхМВых нисходящей линии, (2) выделять управляющие векторы для передачи по восходящей линии (если поддерживается режим управления лучом или пространственного мультиплексирования), и (3) выделять согласованный фильтр для передачи по нисходящей линии. Управляемый эталон нисходящей линии может также использоваться конкретным пользовательским терминалом для оценки канала.
Управляемый эталон восходящей линии передается каждым активным пользовательским терминалом, который поддерживает режим управления лучом или пространственного мультиплексирования и может использоваться пунктом доступа, чтобы (1) выделять управляющие векторы для передачи по нисходящей линии и (2) выделять согласованный фильтр для передачи по восходящей линии. В общем, управляемый эталон посылается только для тех пользовательских терминалом или теми пользовательскими терминалами, которые поддерживают режимы управления лучом и (или) пространственного мультиплексирования. Посылка эталона работает независимо от того, управляется ли она надлежащим образом (например, вследствие плохой оценки канала). То есть эталон становится ортогональным на каждую передающую антенну, поскольку управляющая матрица диагональна.
Если пользовательский терминал калиброван, то он может передавать управляемый эталон на главной собственной моде по каналу RACH с использованием вектора 
 , для
, для  ∈
∈ , где является столбцом
, где является столбцом  для главной собственной моды. Если пользовательский терминал не калиброван, то он может передавать пилот-сигнал по каналу RACH с использованием вектора
для главной собственной моды. Если пользовательский терминал не калиброван, то он может передавать пилот-сигнал по каналу RACH с использованием вектора  , для ∈. Вектор
, для ∈. Вектор  для каждого поддиапазона включает в себя
для каждого поддиапазона включает в себя  случайных управляющих коэффициентов, у которых фазы
случайных управляющих коэффициентов, у которых фазы  , для
, для  ∈{1, 2, …, }, могут выбираться в соответствии с псевдослучайной процедурой. Поскольку имеют значение только относительные фазы среди управляющих коэффициентов, фаза первого управляющего коэффициента может быть установлена на нуль (т.е.
∈{1, 2, …, }, могут выбираться в соответствии с псевдослучайной процедурой. Поскольку имеют значение только относительные фазы среди управляющих коэффициентов, фаза первого управляющего коэффициента может быть установлена на нуль (т.е.  =0). Фазы остальных -1 управляющих коэффициентов могут изменяться для каждой попытки доступа, так что все 360° покрываются каждым управляющим коэффициентом в интервалах 360°/
=0). Фазы остальных -1 управляющих коэффициентов могут изменяться для каждой попытки доступа, так что все 360° покрываются каждым управляющим коэффициентом в интервалах 360°/ , где является функцией от . Возмущения фаз элементов управляющего вектора
, где является функцией от . Возмущения фаз элементов управляющего вектора  на каждой попытке в канале RACH при использовании канала RACH в режиме управления лучом перед калибровкой, таковы, что пользовательский терминал не использует плохой управляющий вектор для всех попыток доступа. Пилот-сигнал МВхМВых может посылаться для пользовательских терминалов или пользовательскими терминалами, которые не поддерживают режимы управления лучом и (или) пространственного мультиплексирования.
на каждой попытке в канале RACH при использовании канала RACH в режиме управления лучом перед калибровкой, таковы, что пользовательский терминал не использует плохой управляющий вектор для всех попыток доступа. Пилот-сигнал МВхМВых может посылаться для пользовательских терминалов или пользовательскими терминалами, которые не поддерживают режимы управления лучом и (или) пространственного мультиплексирования.
Пункт доступа не имеет информации о канале для любого пользовательского терминала до тех пор, пока этот пользовательский терминал осуществляет связь непосредственно с пунктом доступа. Когда пользовательский терминал желает передать данные, он сначала оценивает канал на основании пилот-сигнала МВхМВых, переданного пунктом доступа. Пользовательский терминал затем посылает управляемый эталон в преамбуле RACH, когда он пытается получить доступ к системе. Пункт доступа использует этот эталон в преамбуле RACH для обнаружения сигнала и оценки канала.
После того как пользовательскому терминалу разрешен доступ к системе и назначены ресурсы FCH/RCH пунктом доступа, пользовательский терминал посылает эталон (к примеру, пилот-сигнал МВхМВых) в начале каждого из ПБД канала RCH, которые он передает. Если пользовательский терминал использует режим разнесения, тогда эталон посылается на RCH без управления. Если пользовательский терминал использует режим управления лучом или пространственного мультиплексирования, то управляемый эталон посылается по каналу RCH, позволяя пункту доступа определить собственный вектор для главной собственной моды (для режима управления лучом) или набор из четырех собственных векторов (для режима пространственного мультиплексирования) для каждого из 48 поддиапазонов данных. Управляемый эталон позволяет пункту доступа улучшить его оценку канала и отслеживать канал.
1. Маяковый пилот-сигнал - нисходящая линия
Маяковый пилот-сигнал нисходящей линии включается в первую часть ВСН (как показано на фиг.5А) и передается в каждом кадре ДВР. Маяковый пилот-сигнал включает в себя конкретный символ МОРЧ (обозначенный как "В"), который передается каждой из четырех антенн в пункте доступа. Тот же самый символ МОРЧ В передается дважды в двухсимвольной длительности для маякового пилот-сигнала.
В конкретном варианте осуществления символ МОРЧ содержит набор из 12 символов  модуляции BPSK для 12 конкретных поддиапазонов, которые показаны в Таблице 34.
модуляции BPSK для 12 конкретных поддиапазонов, которые показаны в Таблице 34.
Пилотные символы
пазона

пазона

пазона

Для варианта осуществления маякового пилот-сигнала, показанного в Таблице 34, символ МОРЧ содержит (1) символ (1+) модуляции BPSK для поддиапазонов -24, -16, -4, 12, 16, 20 и 24, (2) символ -(1+ ) модуляции BPSK для поддиапазонов -20, -12, -8, 4 и 8, и (3) сигнальные значения нуля для остальных 52 поддиапазонов. Символ МОРЧ В специально рассчитан, чтобы облегчить синхронизацию и получение частоты пользовательскими терминалами. Однако для маякового пилот-сигнала могут использоваться и другие символы МОРЧ, которые входят в объем изобретения.
) модуляции BPSK для поддиапазонов -20, -12, -8, 4 и 8, и (3) сигнальные значения нуля для остальных 52 поддиапазонов. Символ МОРЧ В специально рассчитан, чтобы облегчить синхронизацию и получение частоты пользовательскими терминалами. Однако для маякового пилот-сигнала могут использоваться и другие символы МОРЧ, которые входят в объем изобретения.
2. Пилот-сигнал МВхМВых - нисходящая линия
Пилот-сигнал МВхМВых нисходящей линии включается во вторую часть ВСН (как показано на фиг.5А) и также передается в каждом кадре ДВР. Пилот-сигнал МВхМВых включает в себя конкретный символ МОРЧ (обозначенный как "Р"), который передается каждой из четырех антенн в пункте доступа. Тот же самый символ МОРЧ Р передается восемь раз в 8-символьной длительности для пилот-сигнала МВхМВых. Однако восемь символов МОРЧ Р для каждой антенны "покрываются" отличающейся 4-элементной последовательностью Уолша, назначенной этой антенне. Покрытие есть процесс, посредством которого подлежащий передаче заданный пилот-сигнал или символ данных (или набор из  пилот-сигналов/символов данных с одинаковым значением) перемножается со всеми
пилот-сигналов/символов данных с одинаковым значением) перемножается со всеми  элементами
элементами  -элементной ортогональной последовательности для получения
-элементной ортогональной последовательности для получения  покрытых символов, которые затем передаются. Вскрытие есть комплементарный процесс, посредством которого принятые символы перемножаются с элементами -элементной ортогональной последовательности для получения вскрытых символов, которые затем накапливаются для получения оценки переданного пилот-сигнала/символа данных. Покрытие обеспечивает ортогональность между
покрытых символов, которые затем передаются. Вскрытие есть комплементарный процесс, посредством которого принятые символы перемножаются с элементами -элементной ортогональной последовательности для получения вскрытых символов, которые затем накапливаются для получения оценки переданного пилот-сигнала/символа данных. Покрытие обеспечивает ортогональность между  передачами пилот-сигнала
передачами пилот-сигнала  передающими антеннами и позволяет пользовательским терминалам различать отдельные передающие антенны. Покрытие может быть реализовано последовательностями Уолша или другими ортогональными последовательностями.
передающими антеннами и позволяет пользовательским терминалам различать отдельные передающие антенны. Покрытие может быть реализовано последовательностями Уолша или другими ортогональными последовательностями.
В конкретном варианте осуществления символ МОРЧ Р содержит набор из 52 символов  модуляции МОРЧ для 48 поддиапазонов данных и 4 пилотных поддиапазонов, которые показаны в Таблице 34. Сигнальные значения нуля передаются в остальных 12 поддиапазонах. Символ МОРС Р содержит уникальное "слово" из 52 символов модуляции QPSK, которое сформировано для облегчения оценки канала пользовательскими терминалами. Это уникальное слово также выбирается, чтобы минимизировать измеренные значения отношения пиковой к средней мощности в передаваемом пилот-сигнале МВхМВых. Это может также снизить величину искажений и нелинейности, генерируемых приемной схемой в пользовательских терминалах, что может обеспечить улучшенную точность оценки канала. Однако для пилот-сигнала МВхМВых можно использовать и другие символы МОРЧ, которые входят в объем изобретения.
модуляции МОРЧ для 48 поддиапазонов данных и 4 пилотных поддиапазонов, которые показаны в Таблице 34. Сигнальные значения нуля передаются в остальных 12 поддиапазонах. Символ МОРС Р содержит уникальное "слово" из 52 символов модуляции QPSK, которое сформировано для облегчения оценки канала пользовательскими терминалами. Это уникальное слово также выбирается, чтобы минимизировать измеренные значения отношения пиковой к средней мощности в передаваемом пилот-сигнале МВхМВых. Это может также снизить величину искажений и нелинейности, генерируемых приемной схемой в пользовательских терминалах, что может обеспечить улучшенную точность оценки канала. Однако для пилот-сигнала МВхМВых можно использовать и другие символы МОРЧ, которые входят в объем изобретения.
В варианте осуществления четырем антеннам в пункте доступа назначаются 4-элементные последовательности Уолша W1=1111, W2=1010, W3=1100 и W4=1001 для пилот-сигнала МВхМВых. Для заданной последовательности Уолша значение "1" указывает, что передается символ МОРЧ Р, а значение "0" указывает, что передается символ МОРЧ -Р (т.е. каждый из 52 символов модуляции в Р инвертируется).
Таблица 35 перечисляет символы МОРЧ, подлежащие передаче каждой из четырех антенн в пункте доступа для маякового пилот-сигнала и пилот-сигнала МВхМВых. Символы МОРЧ В и Р такие, как описано выше.
Маяковый и МВхМВых пилот-сигналы
Пилот-сигнал МВхМВых может использоваться пользовательским терминалом для оценки канального отклика в нисходящей линии. В частности, чтобы восстановить пилот-сигнал, посланный из антенны  пункта доступа и принятый антенной
пункта доступа и принятый антенной  пользовательского терминала, пилот-сигнал, принятый антенной
пользовательского терминала, пилот-сигнал, принятый антенной  терминала, сначала перемножается с последовательностью Уолша, назначенной антенне
терминала, сначала перемножается с последовательностью Уолша, назначенной антенне  пункта доступа. Восемь вскрытых символов МОРЧ для всех восьми символьных периодов для пилот-сигнала МВхМВых затем накапливаются, причем накопление выполняется по отдельности для каждого из 52 поддиапазонов, используемых для переноса пилот-сигнала МВхМВых. Результатами накопления являются
пункта доступа. Восемь вскрытых символов МОРЧ для всех восьми символьных периодов для пилот-сигнала МВхМВых затем накапливаются, причем накопление выполняется по отдельности для каждого из 52 поддиапазонов, используемых для переноса пилот-сигнала МВхМВых. Результатами накопления являются  , для
, для  =±{1, …, 26}, что является оценкой калиброванного канального отклика нисходящей линии из антенны пункта доступа к антенне
=±{1, …, 26}, что является оценкой калиброванного канального отклика нисходящей линии из антенны пункта доступа к антенне  пользовательского терминала для 52 поддиапазонов данных и пилот-сигнала.
пользовательского терминала для 52 поддиапазонов данных и пилот-сигнала.
Та же самая обработка пилот-сигнала может выполняться пунктом доступа для восстановления пилот-сигнал, передаваемого от каждой антенны пункта доступа к каждой антенне пользовательского терминала. Пилот-сигнал, переданный каждой антенной пункта доступа, может быть восстановлен вскрытием с помощью последовательностей Уолша, назначенных этой антенне. Обработка пилот-сигнала обеспечивает  ·
· значений для каждого из 52 поддиапазонов, где
значений для каждого из 52 поддиапазонов, где  обозначает число антенн в пункте доступа, а
обозначает число антенн в пункте доступа, а  обозначает число антенн в пользовательском терминале. ·
обозначает число антенн в пользовательском терминале. · значений для каждого поддиапазона являются элементами оценки
значений для каждого поддиапазона являются элементами оценки  калиброванных канальных откликов нисходящей линии для этого поддиапазона.
калиброванных канальных откликов нисходящей линии для этого поддиапазона.
Пилот-сигнал МВхМВых может также передаваться по восходящей линии пользовательским терминалом для калибровки и в режиме разнесения. Та же самая обработка, описанная выше для пользовательского терминала, для восстановления пилот-сигнала МВхМВых, посланного пунктом доступа, может также выполняться пунктом доступа, чтобы восстановить пилот-сигнал МВхМВых, посланный пользовательским терминалом.
3. Управляемый эталон
Управляемый эталон может передаваться в части преамбулы ПБД канала RACH (как показано на фиг.5С) или ПБД канала RCH (как показано на фиг.5Е и 5G) каждым активным пользовательским терминалом. Управляемый эталон может также передаваться в части преамбулы ПБД канала FCH (как показано на фиг.5Е и 5F) пунктом доступа к активному пользовательскому терминалу.
А. Управляемый эталон и пространственное мультиплексирование
Управляемый эталон содержит конкретный символ МОРЧ (например, тот же самый символ МОРЧ Р, используемый для пилот-сигнала МВхМВых), который передается всеми передающими антеннами в пользовательском терминале (для восходящей линии) или пункте доступа (для нисходящей линии). Однако символ МОРЧ Р для каждого символьного периода обрабатывается пространственно (т.е. формированием луча) управляющим вектором для одной собственной моды.
Первый символ управляемого эталона, передаваемого пользовательским терминалом в преамбуле канала RACH, может быть выражен как:

где  является вектором передачи для поддиапазона
является вектором передачи для поддиапазона  ;
;
 является корреляционной матрицей для поддиапазона
является корреляционной матрицей для поддиапазона  для пользовательского терминала;
для пользовательского терминала;
 является управляющим вектором для поддиапазона
является управляющим вектором для поддиапазона  главной широкополосной собственной моды;
главной широкополосной собственной моды;
 является пилотным символом для поддиапазона ; и
является пилотным символом для поддиапазона ; и
 ={-32,…,31} является набором индексов для всех 64 поддиапазонов.
={-32,…,31} является набором индексов для всех 64 поддиапазонов.
Вектор включает в себя четыре символа передачи для каждого значения , которые подлежат передаче четырьмя антеннами в пользовательском терминале. Управляющий вектор  является первым столбцом матрицы
является первым столбцом матрицы  правых собственных векторов оценки
правых собственных векторов оценки  калиброванных канальных откликов восходящей линии, где
калиброванных канальных откликов восходящей линии, где  , а
, а  является -м столбцом . Выше предполагается, что сингулярные значения в
является -м столбцом . Выше предполагается, что сингулярные значения в  и столбцы
и столбцы  упорядочиваются, как описано выше.
упорядочиваются, как описано выше.
Второй символ управляемого эталона, передаваемый пользовательским терминалом в преамбуле канала RACH, включает в себя индикатор скорости передачи данных (ИСД) (DRI) для ПБД канала RACH. ИСД указывает скорость, использованную для сообщения RACH, посланного в ПБД канала RACH. ИСД встраивается во второй символ управляемого эталона путем отображения ИСД в конкретный символ МОРЧ  , как показано в Таблице 15. Символ затем перемножается с пилотным символом
, как показано в Таблице 15. Символ затем перемножается с пилотным символом  перед выполнением пространственной обработки. Второй символ управляемого эталона для RACH может быть выражен как:
перед выполнением пространственной обработки. Второй символ управляемого эталона для RACH может быть выражен как:

Как показано в уравнениях (64) и (65), только собственный вектор для главного широкополосной собственной моды используется для управляемого эталона для RACH.
Символ управляемого эталона, переданный пользовательским терминалом в преамбуле канала RACH, может быть выражен как:

где  является вектором передачи для поддиапазона широкополосной собственной моды ; и
является вектором передачи для поддиапазона широкополосной собственной моды ; и
 является управляющим вектором для поддиапазона широкополосной собственной моды (т.е.
является управляющим вектором для поддиапазона широкополосной собственной моды (т.е.  -м столбцом
-м столбцом  .
.
Символ управляемого эталона, переданный пунктом доступа в преамбуле канала FCH, может быть выражен как:

где  является вектором передачи для поддиапазона
является вектором передачи для поддиапазона  широкополосной собственной моды ;
широкополосной собственной моды ;
является корректировочной матрицей для поддиапазона для пункта доступа; и
 является управляющим вектором для поддиапазона широкополосной собственной моды .
является управляющим вектором для поддиапазона широкополосной собственной моды .
Управляющий вектор  является -м столбцом матрицы
является -м столбцом матрицы  правых собственных векторов оценки
правых собственных векторов оценки  калиброванных канальных откликов нисходящей линии, где
калиброванных канальных откликов нисходящей линии, где  .
.
Управляемый эталон может передаваться различным образом. В одном варианте осуществления один или более собственных векторов используются для управляемого эталона для каждого кадра ДВР и зависят от длительности управляемого эталона, которая указывается полями Тип преамбулы FCH/RCH в информационном элементе FCCH. Таблица 36 перечисляет приведенные для примера собственные векторы, используемые для преамбулы для каналов FCH и RCH для различных размеров преамбулы.
 , где =счетчику кадров по модулю 4
, где =счетчику кадров по модулю 4
Как показано в Таблице 36, управляемый эталон передается для всех четырех собственных мод в единственном кадре ДВР, когда размер преамбулы равен четырем или восьми символам МОРЧ. Управляемый эталон, переданный пользовательским терминалом для  -го символа МОРЧ в преамбуле для канала RCH, может быть выражен как:
-го символа МОРЧ в преамбуле для канала RCH, может быть выражен как:

где  является размером преамбулы, т.е.
является размером преамбулы, т.е.  =4 для Типа 2 и =8 для Типа 3.
=4 для Типа 2 и =8 для Типа 3.
Аналогично, управляемый эталон, переданный пунктом доступа для -го символа МОРЧ в преамбуле для канала FCH, может быть выражен как:

Как показано в уравнениях (68) и (69), четыре собственных моды циклически повторяются через каждый 4-символьный период посредством операции ( mod 4) для управляющего вектора. Эта схема может использоваться, если канал изменяется более быстро и (или) на ранней стадии соединения, когда нужно быстро получить хорошую оценку канала для правильной работы системы.
В другом варианте осуществления управляемый эталон передается для одной широкополосной собственной моды для каждого кадра ДВР. Управляемый эталон для четырех широкополосных собственных мод может циклически повторяться через четыре кадра ДВР. Например, управляющие векторы  ,
,  ,
,  и
и  могут использоваться пользовательским терминалом для первого, второго, третьего и четвертого кадров ДВР, соответственно. Конкретный используемый управляющий вектор может конкретизироваться двумя младшими битами значения счетчика кадров в сообщении канала ВСН. Эта схема позволяет использовать более короткую часть преамбулы в ПБД, но может потребовать более длительного периода времени, чтобы получить хорошую оценку канала.
могут использоваться пользовательским терминалом для первого, второго, третьего и четвертого кадров ДВР, соответственно. Конкретный используемый управляющий вектор может конкретизироваться двумя младшими битами значения счетчика кадров в сообщении канала ВСН. Эта схема позволяет использовать более короткую часть преамбулы в ПБД, но может потребовать более длительного периода времени, чтобы получить хорошую оценку канала.
Для обоих описанных выше вариантов осуществления управляемый эталон может передаваться на всех четырех собственных модах для передачи данных, даже при использовании в данный момент менее, чем четырех собственных мод (к примеру, из-за того, что неиспользуемые собственные моды являются некачественными и отброшены за счет создания избыточности). Передача управляемого эталона на неиспользуемой в данный момент собственной моде позволяет приемнику определить, когда собственная мода улучшается в достаточной степени, чтобы выбрать ее для использования.
В. Управляемый эталон для управления лучом
Для режима управления лучом пространственная обработка на передающей стороне выполняется с помощью набора нормированных собственных векторов для главной широкополосной собственной моды. Общая функция переноса нормированным собственным вектором отлична от общей функции переноса ненормированным собственным вектором (т.е.
 ≠
≠
 ). Управляемый эталон, генерируемый с использованием набора нормированных собственных векторов для всех поддиапазонов, может затем передаваться передатчиком и использоваться приемником для выделения векторов согласованных фильтров для этих поддиапазонов для режима управления лучом.
). Управляемый эталон, генерируемый с использованием набора нормированных собственных векторов для всех поддиапазонов, может затем передаваться передатчиком и использоваться приемником для выделения векторов согласованных фильтров для этих поддиапазонов для режима управления лучом.
Для восходящей линии управляемый эталон для режима управления лучом может быть выражен как:

В пункте доступа принятый управляемый эталон восходящей линии для режима управления лучом может быть выражен как:

Чтобы получить вектор-строку  согласованного фильтра для передачи по восходящей линии с управлением лучом, принятый вектор
согласованного фильтра для передачи по восходящей линии с управлением лучом, принятый вектор  для управляемого эталона сначала перемножается с
для управляемого эталона сначала перемножается с  . Результат затем интегрируется по множеству принятых символов управляемого эталона для формирования оценки
. Результат затем интегрируется по множеству принятых символов управляемого эталона для формирования оценки 
 . Вектор
. Вектор  является сопряженной транспозицией от этой оценки.
является сопряженной транспозицией от этой оценки.
При работе в режиме управления лучом пользовательский терминал может передавать множество символов управляемого эталона, к примеру, одни или более символов с использованием нормированного собственного вектора , один или более символов с использованием собственного вектора  для главной широкополосной собственной моды и, возможно, один или более символов с использованием собственных векторов для других широкополосных собственных мод. Символы управляемого эталона, генерируемые в помощью
для главной широкополосной собственной моды и, возможно, один или более символов с использованием собственных векторов для других широкополосных собственных мод. Символы управляемого эталона, генерируемые в помощью  , могут использоваться пунктом доступа для получения вектора
, могут использоваться пунктом доступа для получения вектора  согласованного фильтра. Символы управляемого эталона, генерируемые с помощью
согласованного фильтра. Символы управляемого эталона, генерируемые с помощью  , могут использоваться для получения
, могут использоваться для получения  , который может затем использоваться для получения нормированного собственного вектора
, который может затем использоваться для получения нормированного собственного вектора  , который используется для управления лучом в нисходящей линии. Символы управляемого эталона, генерируемые собственными векторами
, который используется для управления лучом в нисходящей линии. Символы управляемого эталона, генерируемые собственными векторами  -
-  для других собственных мод, могут использоваться пунктом доступа для получения
для других собственных мод, могут использоваться пунктом доступа для получения  -
-  и сингулярных значений для этих других собственных мод. Эта информация может затем использоваться пунктом доступа, чтобы определить, используется ли режим пространственного мультиплексирования или режим управления лучом для передачи данных.
и сингулярных значений для этих других собственных мод. Эта информация может затем использоваться пунктом доступа, чтобы определить, используется ли режим пространственного мультиплексирования или режим управления лучом для передачи данных.
Для нисходящей линии пользовательский терминал может получить вектор  для режима управления лучом на основе оценки
для режима управления лучом на основе оценки  калиброванных канальных откликов нисходящей линии. В частности, пользовательский терминал имеет
калиброванных канальных откликов нисходящей линии. В частности, пользовательский терминал имеет  из декомпозиции по сингулярным значениям и может получить нормированный собственный вектор
из декомпозиции по сингулярным значениям и может получить нормированный собственный вектор  . Пользовательский терминал может затем перемножить с , чтобы получить
, и далее может получить на основе
. Альтернативно, управляемый эталон может быть передан пунктом доступа с помощью нормированного собственного вектора , и этот управляемый эталон может обрабатываться пользовательским терминалом так, как описано выше для получения
. Пользовательский терминал может затем перемножить с , чтобы получить
, и далее может получить на основе
. Альтернативно, управляемый эталон может быть передан пунктом доступа с помощью нормированного собственного вектора , и этот управляемый эталон может обрабатываться пользовательским терминалом так, как описано выше для получения  .
.
4. Пилот-сигнал несущей - восходящая линия
Описанная структура поддиапазона МОРЧ включает в себя четыре поддиапазона пилот-сигналов с индексами -21, -7, 7 и 21. В одном варианте осуществления пилот-сигнал несущей передается в четырех поддиапазонах пилот-сигнала во всех символах МОРЧ, которые не являются частями преамбулы. Пилот-сигнал несущей может быть использован приемником, чтобы отслеживать фазовые изменения вследствие дрейфа в генераторах как в передатчике, так и в приемнике. Это может обеспечить улучшенные показатели при демодуляции данных.
Пилот-сигнал несущей содержит четыре пилотных последовательности,  ,
,  ,
,  и
и  , которые передаются в четырех поддиапазонах пилот-сигналов. Пилотные последовательности могут быть определены как:
, которые передаются в четырех поддиапазонах пилот-сигналов. Пилотные последовательности могут быть определены как:

где  есть индекс для символьного периода МОРЧ.
есть индекс для символьного периода МОРЧ.
Пилотные последовательности могут быть определены на основании разных последовательностей данных. В варианте осуществления пилотная последовательность генерируется на основании полинома  , где начальное состояние устанавливается на все нули, а выходные биты отображаются в значения сигнала следующим образом: 1 ⇒ -1 и 0 ⇒ 1. Пилотная последовательность для ={1, 2, …, 127} может быть выражена как:
, где начальное состояние устанавливается на все нули, а выходные биты отображаются в значения сигнала следующим образом: 1 ⇒ -1 и 0 ⇒ 1. Пилотная последовательность для ={1, 2, …, 127} может быть выражена как:
Значения "1" и "-1" в пилотной последовательности  могут отображаться в пилотные символы с помощью конкретной схемы модуляции. Например, с помощью BPSK "1" может отображаться в 1+
могут отображаться в пилотные символы с помощью конкретной схемы модуляции. Например, с помощью BPSK "1" может отображаться в 1+ , а "-1" может отображаться в -(1+). Если имеется более 127 символов МОРЧ, то пилотная последовательность может повторяться, так что
, а "-1" может отображаться в -(1+). Если имеется более 127 символов МОРЧ, то пилотная последовательность может повторяться, так что  =
= ( mod 127) для >127.
( mod 127) для >127.
В одном варианте осуществления четыре пилотных последовательности переустанавливаются для каждого транспортного канала. Таким образом, в нисходящей линии пилотные последовательности переустанавливаются для первого символа МОРЧ сообщения канала ВСН, переустанавливаются опять для первого символа МОРЧ сообщения канала FCCH и переустанавливаются для первого символа МОРЧ, переданного по каналу FCH. В другом варианте осуществления пилотные последовательности переустанавливаются в начале каждого кадра ДВР и повторяются так часто, как это необходимо. Для этого варианта осуществления пилотные последовательности могут быть остановлены в течение части преамбулы каналов ВСН и FCH.
В режиме разнесения четыре пилотных последовательности отображаются на четыре пары поддиапазонов/антенн, как показано в Таблице 29. В частности,  используется для поддиапазона -21 антенны 1,
используется для поддиапазона -21 антенны 1,  используется для поддиапазона -7 антенны 2,
используется для поддиапазона -7 антенны 2,  используется для поддиапазона 7 антенны 3, а
используется для поддиапазона 7 антенны 3, а  используется для поддиапазона 21 антенны 4. Каждая пилотная последовательность затем передается на связанных с ней поддиапазоне и антенне.
используется для поддиапазона 21 антенны 4. Каждая пилотная последовательность затем передается на связанных с ней поддиапазоне и антенне.
В режиме пространственного мультиплексирования четыре пилотных последовательности передаются на главной собственной моде их соответствующих поддиапазонов. Пространственная обработка для пилотных символов несущей аналогична выполняемой для символов модуляции, как описано выше. В режиме управления лучом четыре пилотных последовательности передаются на их соответствующих поддиапазонах с использованием управления лучом. Управление лучом для пилотных символов несущей также аналогично выполняемому для символов модуляции.
Конкретная структура пилот-сигнала описана выше для системы БЛВС МВхМВых. Для этой системы также могут использоваться другие структуры пилот-сигнала, которые входят в объем изобретения.
IX. Работа системы
Фиг.12А показывает конкретный вариант осуществления диаграммы 1200 состояний для работы пользовательского терминала. Эта диаграмма состояний включает в себя четыре состояния - состояние 1210 Инициирование, состояние 1220 Неактивное, состояние 1230 Доступ и состояние 1240 Соединение. Каждое из состояний 1210, 1220, 1230 и 1240 может ассоциироваться с несколькими подсостояниями (не показаны на фиг.12А для простоты).
В состоянии Инициирование пользовательский терминал получает системную частоту и синхронизацию, и получает параметры системы, посланные по каналу ВСН. В состоянии Инициирование пользовательский терминал может выполнять следующие функции:
- Определение системы - пользовательский терминал определяет, на какой несущей частоте захватить систему.
- Захват частоты/синхронизации - пользовательский терминал захватывает маяковый пилот-сигнал и соответственно настраивает свою частоту и синхронизацию.
- Захват параметров - пользовательский терминал обрабатывает ВСН, чтобы получить параметры системы, связанные с пунктом доступа, из которого принимается сигнал нисходящей линии.
По завершении требуемых для состояния Инициирование функций пользовательский терминал переходит в состояние Неактивное.
В состоянии Неактивное пользовательский терминал периодически отслеживает канал ВСН на наличие обновленных параметров системы, указаний поисковых вызовов и широковещательных сообщений, посылаемых по нисходящей линии, и т.д. Никакие радио ресурсы не выделяются пользовательскому терминалу в этом состоянии. В состоянии Неактивное пользовательский терминал может выполнять следующие функции:
- Если обеспечивается регистрация, пользовательский терминал входит в состояние Доступ с запросом регистрации.
- Если обеспечивается калибровка передатчика/приемника, пользовательский терминал входит в состояние Доступ с запросом калибровки.
- Пользовательский терминал контролирует канал ВСН на наличие указания поисковых вызовов и широковещательных сообщений, посланных по каналу FCH.
- Если пользовательский терминал имеет данные, чтобы послать их по восходящей линии, он входит в состояние Доступ с запросом ресурсов.
- Пользовательский терминал выполняет эксплуатационные процедуры, такие как обновление параметров системы и слежение за каналом.
- Пользовательский терминал может входить в прерывистый режим работы для сбережения мощности, если этот режим поддерживается пользовательским терминалом.
Если пользовательскому терминалу нужны радио ресурсы от пункта доступа для какой-либо задачи, он переходит в состояние Доступ. Например, пользовательский терминал может перейти в состояние Доступ в ответ на поисковый вызов или индикатор DST, посылаемый в сообщении канала ВСН, для регистрации или запроса на калибровку или для запроса выделенных ресурсов.
В состоянии Доступ пользовательский терминал находится в процессе обращения к системе. Пользовательский терминал может посылать короткие сообщения и (или) запросы на ресурсы FCH/RCH с использованием канала RACH. Работа в канале RACH более подробно описана ниже. Если пользовательский терминал отсоединяется от пункта доступа, то он переходит назад в состояние Неактивное. Если пользовательскому терминалу назначаются ресурсы для нисходящей линии и (или) восходящей линии, то он переходит в состояние Соединение.
В состоянии Соединение пользовательскому терминалу назначаются ресурсы FCH/RCH, хотя и необязательно для каждого кадра ДВР. Пользовательский терминал может активно использовать выделенные ресурсы или может находится в ожидании (поддерживая соединение) в состоянии Соединение. Пользовательский терминал остается в состоянии Соединение до тех пор, пока он не будет отсоединен пунктом доступа или если выйдет его время после отсутствия активности для конкретного периода времени простоя, и в этом случае он переходит назад в состояние Неактивное.
Находясь в состоянии Неактивное, Доступ или Соединение, пользовательский терминал переходит назад в состояние Инициирование, если его питание выключается или если соединение отбрасывается.
Фиг.12В показывает конкретный вариант осуществления диаграммы состояний для состояния 1240 Соединение. В этом варианте осуществления состояние Соединение включает в себя три подсостояния - подсостояние 1260 Установка, подсостояние 1270 Открытое и подсостояние 1280 Ожидание. Пользовательский терминал входит в подсостояние Установка при приеме назначения по каналу FCCH.
В подсостоянии Установка пользовательский терминал находится в процессе установки соединения и еще не обменивается данными. Установка соединения может включать в себя оценку канала для пункта доступа, нахождение скорости передачи, согласование услуг и т.д. При входе в подсостояние Установка пользовательский терминал устанавливает таймер на конкретное значение времени. Если время таймера истекает до выхода пользовательского терминала из этого подсостояния, то он переходит назад в состояние Неактивное. Пользовательский терминал переходит в подсостояние Открытое по завершении установки соединения.
В подсостоянии Открытое пользовательский терминал и пункт доступа обмениваются данными по нисходящей линии и (или) восходящей линии. В подсостоянии Открытое пользовательский терминал контролирует канал ВСН на наличие параметров системы и указания поискового вызова/широковещательных сообщений. Если сообщение канала ВСН невозможно правильно декодировать в конкретном числе кадров ДВР, пользовательский терминал переходит назад в состояние Инициирование.
Пользовательский терминал контролирует также канал FCCH на наличие информации назначения каналов, управления скоростью передачи, управления синхронизацией RCH и управления мощностью. Пользовательский терминал оценивает отношение С/Ш для принятого сигнала с использованием маякового пилот-сигнала канала ВСН и преамбулы канала FCH, и находит максимальную скорость передачи, которая может надежно поддерживаться в канале FCH.
Назначения каналов FCH и RCH для пользовательского терминала для каждого кадра ДВР задаются информационными элементами в ПБД канала FCCH, переданными в текущем (или, возможно, в предыдущем) кадре ДВР. Пользовательскому терминалу может не назначаться передача данных по каналу FCH и (или) RCH для любого заданного кадра ДВР. Для каждого кадра ДВР, в котором пользовательский терминал не планируется на передачу данных, он не принимает ПБД канала FCH по нисходящей линии и не передает по восходящей линии.
Для каждого кадра ДВР, планируемого для пользовательского терминала, передачи данных по нисходящей и (или) восходящей линиям выполняются с использованием скорости, режима передачи и сдвига синхронизации канала RCH (для восходящей линии), указанных в назначениях канала FCCH (т.е. информационных элементах канала FCCH, адресованных этому пользовательскому терминалу). Пользовательский терминал принимает, демодулирует и декодирует посланные ему ПБД канала FCH. Пользовательский терминал также передает ПБД канала RCH, которые включают в себя преамбулу и указатель скорости передачи данных канала FCH. Пользовательский терминал регулирует скорость, используемую в RCH, согласно информации управления скоростью, содержащейся в назначении FCCH. Если для передачи по восходящей линии применяется управление мощностью, то пользовательский терминал регулирует свою мощность передачи на основании команд управления, включенных в назначение FCCH. Обмен данными может быть пакетированным, и в этом случае пользовательский терминал может входить в подсостояние Ожидание всякий раз в отсутствие обмена данными. Пользовательский терминал входит в подсостояние Ожидание по указанию пункта доступа. Если пункт доступа не назначает канал FCH или RCH пользовательскому терминалу в конкретном числе кадров ДВР, то пользовательский терминал переходит назад в состояние Неактивное и сохраняет свой ИД УДС.
В подсостоянии Ожидание как восходящая линия, так и нисходящая линия незаняты. Данные не посылаются ни в одном направлении. Однако линии поддерживаются с использованием управляемого эталона и управляющих сообщений. В этом подсостоянии пункт доступа периодически назначает ПБД Ожидания пользовательскому терминалу по каналу RCH и, возможно, FCH (не обязательно одновременно). Пользовательский терминал может сохранять состояние Соединение бесконечно при условии, что пункт доступа периодически назначает ПБД Ожидания по каналу FCH и RCH, чтобы поддерживать линию.
Находясь в подсостоянии Ожидание, пользовательский терминал контролирует канал ВСН. Если сообщение канала ВСН не декодируется правильно в конкретном числе кадров ДВР, то пользовательский терминал переходит назад в состояние Инициирование. Пользовательский терминал также контролирует канал FCCH на наличие информации назначения каналов, управления скоростью, управления синхронизацией RCH и управления мощностью. Пользовательский терминал может также оценивать отношение С/Ш в принятом сигнале и определять максимальную скорость передачи, поддерживаемую FCH. Пользовательский терминал передает ПБД Ожидания по каналу RCH, когда он назначен, и устанавливает бит Запрос RCH в ПБД Ожидание, если он имеет данные для передачи. Если пункт доступа не назначает канал FCH или RCH пользовательскому терминалу в конкретном числе кадров ДВР, то пользовательский терминал переходит назад в состояние Неактивное и сохраняет свой ИД УДС.
Таймер контрольного времени (простоя) может устанавливаться на конкретное значение при входе в любое из трех подсостояний. Этот таймер будет затем уменьшать свое значение, если в этом подсостоянии нет никакой активности. Терминал будет переходить из подсостояний Установка, Активное и Ожидание назад в состояние Неактивное, по истечении установленного времени таймера контрольного времени, и в состояние Инициирование, если соединение сбрасывается. Из подсостояния Активное или Ожидание терминал будет переходить назад в состояние Неактивное, если соединение разъединяется.
Фиг.12А и 12В показывают конкретный вариант осуществления диаграммы состояний, которая может использоваться для пользовательского терминала. Для системы могут использоваться различные иные диаграммы состояний с меньшим числом состояний и подсостояний, дополнительными и (или) отличными состояниями и подсостояниями, что также входит в объем изобретения.
X. Случайный доступ
В варианте осуществления применяется схема случайного доступа для обеспечения пользовательским терминалам возможности доступа к системе БЛВС МВхМВых. В варианте осуществления схема случайного доступа основана на сегментированной схеме Aloha, посредством которой пользовательский терминал осуществляет передачу в случайно выбранном временном интервале канала RACH, чтобы попытаться получить доступ к системе. Пользовательский терминал может посылать множество передач по каналу RACH, пока не получит доступ или пока не будет достигнуто максимальное число попыток доступа. Различные параметры для каждой передачи по каналу RACH могут изменяться для повышения вероятности успеха, как описано ниже.
Фиг.13 иллюстрирует временной график для канала RACH, который подразделяется на временные интервалы (сегменты) канала RACH. Число временных интервалов RACH, доступных для использования в каждом кадре ДВР, и длительность временного интервала RACH являются конфигурируемыми параметрами. Максимум 32 временных интервала RACH могут быть доступны для использования в каждом кадре ДВР. Защитный интервал между концом последнего временного интервала RACH и началом ПБД ВСН для следующего кадра ДВР также является конфигурируемым параметром. Эти три параметра для RACH могут изменяться от кадра к кадру и указываются полями Длина RACH, Размер временного интервала RACH и Защитный интервал RACH сообщения ВСН.
Когда пользовательский терминал желает получить доступ к системе, он сначала обрабатывает сообщения канала ВСН для получения необходимых параметров системы. Затем пользовательский терминал посылает ПБД канала RACH по каналу RACH. Этот ПБД канала RACH включает в себя сообщение RACH, которое содержит информацию, необходимую пункту доступа для обработки запроса на доступ от пользовательского терминала. Например, сообщение RACH включает в себя назначенный пользовательскому терминалу ИД УДС, который позволяет пункту доступа идентифицировать пользовательский терминал. Регистрация ИД УДС (т.е. конкретное значение ИД УДС) может резервироваться для незарегистрированных пользовательских терминалов. В этом случае, длинный ИД пользовательского терминала может быть включен в поле Полезной нагрузки сообщения RACH вместе с регистрацией ИД УДС.
Как описано выше, ПБД RACH может передаваться на одной из четырех скоростей, которые перечислены в Таблице 15. выбранная скорость встраивается в преамбулу ПБД RACH (как показано на фиг.5С). ПБД RACH также имеет переменную длину в 1, 2, 4 или 8 символов МОРЧ (что также перечислено в Таблице 15), которая указывается в поле Длительность сообщения в сообщении RACH.
Для передачи ПБД RACH пользовательский терминал сначала определяет число временных интервалов RACH, которые можно использовать для передачи (т.е. число "пригодных к употреблению" временных интервалов RACH). Это определение основано на (1) числе временных интервалов RACH, доступных в текущем кадре ДВР, (2) длительности каждого временного интервала RACH, (3) защитном интервале и (4) длине подлежащего передаче ПБД RACH. ПБД RACH не может выходить за конец сегмента RACH в кадре ДВР. Таким образом, если ПБД RACH длиннее, чем один временной интервал RACH плюс защитный интервал, то этот ПБД может не быть передан в одном или более доступных позже временных интервалах RACH. Число временных интервалов RACH, которые можно использовать для передачи ПБД RACH, может быть меньше, чем число доступных временных интервалов RACH, на основании перечисленных выше факторов. Сегмент RACH включает в себя защитный интервал, который предусмотрен для предотвращения взаимных помех между передачей по восходящей линии от пользовательского терминала и следующим сегментом канала ВСН, что возможно для пользовательских терминалов, которые не компенсируют свои задержки времени двухстороннего распространения сигнала.
Затем пользовательский терминал случайным образом выбирает один из подходящих временных интервалов RACH, чтобы передать ПБД RACH. Пользовательский терминал затем передает ПБД RACH, начиная с выбранного временного интервала RACH. Если в пользовательском терминале известна задержка времени двухстороннего распространения сигнала к пункту доступа и обратно, он может учесть эту задержку путем соответствующей регулировки своей синхронизации.
Когда пункт доступа принимает ПБД RACH, он проверяет принятое сообщение RACH с помощью CRC, включенного в это сообщение. Пункт доступа отбрасывает сообщение RACH проверка CRC безуспешна. Если проверка CRC успешна, пункт доступа устанавливает бит Подтверждение RACH в канале ВСН в следующем кадре ДВР и передает подтверждение RACH по каналу FCCH в двух кадрах ДВР. Между установкой бита Подтверждение на ВСН и посылкой подтверждения по каналу FCCH может иметься задержка, которую можно использовать для учета планирования задержки и т.д. Например, если пункт доступа принимает сообщение по каналу RACH, он может установить бит Подтверждение в канале ВСН и получить задержанный отклик по каналу FCCH. Бит Подтверждение препятствует повторным попыткам пользовательских терминалов и позволяет не имеющим успеха пользовательским терминалам быстро осуществить повторную попытку, за исключением периодов занятого канала RACH.
Если пользовательский терминал выполняет регистрацию, то он использует ИД УДС регистрации (к примеру, 0х0001). Пункт доступа отвечает посылкой сообщения Назначение ИД УДС по каналу FCH. Все другие типы передач RACH включают в себя ИД УДС пользовательского терминала, назначенный системой. Пункт доступа явным образом подтверждает все правильно принятые сообщения канала RACH путем посылки подтверждений по каналу FCCH с помощью ИД УДС, назначенного пользовательскому терминалу.
После того, как пользовательский терминал посылает ПБД по каналу RACH, он контролирует каналы ВСН и FCCH, чтобы определить, принят или нет и обработан ли пунктом доступа его ПБД канала RACH. Пользовательский терминал контролирует канал ВСН, чтобы определить, установлен ли в сообщении ВСН бит Подтверждение RACH. Если этот бит установлен, что указывает, что подтверждение для этого и (или) некоторых других пользовательских терминалов посылается по каналу FCCH, то пользовательский терминал затем обрабатывает сообщение канала FCCH, чтобы получить информационные элементы Типа 3 ИЭ, содержащие подтверждения. В противном случае, если бит Подтверждение RACH не посылается, то пользовательский терминал продолжает контролировать канал ВСН или возобновляет свою процедуру доступа по каналу RACH.
Тип 3 ИЭ FCCH используется для быстрого переноса подтверждений для успешных попыток доступа. Каждый информационный элемент подтверждения содержит ИД УДС, связанный с пользовательским терминалом, для которого посылается подтверждение. Быстрое подтверждение используется, чтобы сообщить пользовательскому терминалу, что его запрос доступа принят, но не связан с назначением ресурсов FCH/RCH. Если пользовательский терминал принимает быстрое подтверждение по каналу FCCH, он переходит в состояние Неактивное. Если пользовательский терминал принимает основанное на назначении подтверждение, он получает информацию планирования, посланную вместе с подтверждением, и начинает использование каналов FCH/RCH, как назначено в текущем кадре ДВР.
Пользовательский терминал возобновляет процедуру доступа по каналу RACH, если он не принимает подтверждения по каналу FCH в течение конкретного числа кадров ДВР после передачи ПБД RACH. В этом случае пользовательский терминал может предположить, что пункт доступа не принял правильно ПБД RACH. Пользовательским терминалом поддерживается счетчик для подсчета числа попыток доступа. Этот счетчик может инициализироваться на нуль для первой попытки доступа и получать приращение на единицу для каждой последующей попытки доступа. Пользовательский терминал будет завершать процедуру доступа, если значение счетчика достигает максимального числа попыток.
Для каждой последующей попытки доступа пользовательский терминал сначала определяет различные параметры для этой попытки доступа, в том числе (1) период времени ожидания перед передачей ПБД RACH, (2) временной интервал RACH, используемый для передачи ПБД RACH и (3) скорость передачи для ПБД RACH. Для определения периода времени ожидания, пользовательский терминал сначала определяет максимальный период времени ожидания для следующей попытки доступа, которое называется "окно состязания" (ОС) (CW). В варианте осуществления окно состязания (которое задается в единицах кадров ДВР) экспоненциально увеличивается для каждой попытки доступа (т.е. ОС=2попытки_доступа). Окно состязания может быть также определено на основе некоторой другой функции (например, линейной функции) от числа попыток доступа. Период времени ожидания для следующей попытки доступа затем выбирается случайным образом между нулем и ОС. Пользовательский терминал будет ожидать этот период времени перед передачей ПБД RACH для следующей попытки доступа.
Для следующей попытки доступа пользовательский терминал снижает скорость передачи для ПБД RACH, если для последней попытки доступа не использовалась наинизшая скорость. Начальная скорость передачи, используемая для первой попытки доступа, может выбираться на основе отношения С/Ш пилот-сигнала для принятого сигнала, посланного по каналу ВСН. Неудача в приеме подтверждения может быть вызвана безуспешным приемом ПБД RACH пунктом доступа. Таким образом, скорость передачи для ПБД RACH в следующей попытке доступа снижается для повышения вероятности правильного приема пунктом доступа.
После ожидания случайно выбранного времени ожидания пользовательский терминал снова случайным образом выбирает временной интервал RACH для передачи ПБД RACH. Выбор временного интервала RACH для этой попытки доступа может выполняться аналогичным образом, как описано выше для первой попытки доступа, за исключением того, что параметры RACH (т.е. число временных интервалов RACH, длительность временного интервала и защитный интервал) для текущего кадра ДВР, как передано в сообщении ВСН, используются вместе с длиной текущего ПБД RACH. ПБД RACH передается затем в случайно выбранном временном интервале RACH.
Процедура доступа, описанная выше, продолжается до тех пор, пока либо (1) пользовательский терминал не примет подтверждения от пункта доступа, либо (2) не будет достигнуто максимальное число разрешенных попыток доступа. Для каждой попытки доступа период времени ожидания перед передачей ПБД RACH, используемый временной интервал RACH для передачи ПБД RACH и скорость передачи для ПБД RACH могут быть выбраны, как описано выше. Если принято подтверждение, то пользовательский терминал работает, как указывается подтверждением (т.е. он ожидает в состоянии Неактивное, если принимается быстрое подтверждение, или начинает использование FCH/RCH, если принимается основанное на назначении подтверждение). Если максимальное число разрешенных попыток доступа достигнуто, то пользовательский терминал переходит в состояние Инициирование.
XI. Управление скоростью, мощностью и синхронизацией
Пункт доступа планирует передачи нисходящей линии и восходящей линии по каналам FCH и RCH и управляет скоростями передачи для всех активных пользовательских терминалов. Кроме того, пункт доступа регулирует мощность передачи некоторых активных пользовательских терминалов в восходящей линии. Различные контура могут поддерживаться для регулировки скорости, мощности передачи и синхронизации для каждого активного пользовательского терминала.
1. Услуги фиксированной и переменной скорости
Пункт доступа может поддерживать услуги как фиксированной, так и переменной скорости в канале FCH и RCH. Услуги фиксированной скорости могут использоваться для передачи речи, видео и т.д. Услуги переменной скорости могут использоваться для передачи пакетированных данных (например, веб-поиска).
Для услуг с фиксированной скоростью в каналах FCH/RCH фиксированная скорость может использоваться для всего соединения. Доставка с максимальными усилиями используется в каналах FCH и RCH (т.е. нет повторной передачи). Пункт доступа планирует постоянное число ПБД FCH/RCH на конкретный временной интервал, чтобы удовлетворить требования QoS услуги. В зависимости от требований задержки пункту доступа может не требоваться планировать ПБД FCH/RCH для каждого кадра ДВР. Для услуг с фиксированной скоростью управление мощностью осуществляется в канале RCH, но не в канале FCH.
Для услуг с переменной скоростью в каналах FCH/RCH скорости передачи, используемые для FCH/RCH, могут изменяться в зависимости от канальных условий. Для некоторых изохронных услуг (например, видео, аудио) требования QoS могут налагать ограничение на минимальную скорость передачи. Для этих услуг планировщик в пункте доступа регулирует распределение FCH/RCH, чтобы обеспечить постоянную скорость передачи. Для асинхронных услуг передачи данных (например, веб-поиск, перенос файлов и т.д.) доставка с максимальными усилиями обеспечивается опцией повторных передач. Для этих услуг скорость передачи является максимальной скоростью, которая может надежно поддерживаться канальными условиями. Планирование ПБД FCH/RCH для пользовательских терминалов представляет собой обычно функцию от требований QoS. Всякий раз, как отсутствуют данные для посылки на нисходящей/восходящей линии, ПБД Свободно посылается по каналу FCH/RCH для поддержания линии. Управление мощностью в замкнутом контуре не производится в канале FCH или RCH для услуг с переменной скоростью.
2. Управление скоростью
Управление скоростью может использоваться для услуг с переменной скоростью, использующих каналы FCH и RCH, чтобы адаптировать скорость передачи FCH/RCH к изменяющимся канальным условиям. Скорости для использования в каналах FCH и RCH могут управляться независимо. Кроме того, в режиме пространственного мультиплексирования скорость передачи для каждой широкополосной собственной моды каждого выделенного транспортного канала может управляться независимо. Управление скоростью выполняется пунктом доступа на основе обратной связи, обеспеченной каждым активным пользовательским терминалом. Планировщик в пункте доступа планирует передачу данных и определяет назначения скорости для активных пользовательских терминалов.
Максимальная скорость передачи, которая может поддерживаться на любой линии, является функцией (1) матрицы канальных откликов для всех поддиапазонов данных, (2) уровня шума, наблюдаемого приемником, (3) качества оценки канала и, возможно, других факторов. Для системы ДВР канал можно рассматривать как обратимый для нисходящей линии и восходящей линии (после того, как выполнена калибровка для учета любых различий в пункте доступа и пользовательском терминале). Однако этот обратимый канал не предполагает, что шумовые пороги одни и те же в пункте доступа и пользовательском терминале. Таким образом, для заданного пользовательского терминала скорости передачи на FCH и RCH могут управляться независимо.
Управление скоростью в замкнутом контуре может использоваться для передачи данных на одном или более пространственных каналов. Управление скоростью в замкнутом контуре может быть реализовано с использованием одного или множества контуров. Внутренний контур оценивает канальные условия и выбирает подходящую скорость передачи для каждого пространственного канала, используемого для передачи данных. Оценка канала и выбор скорости могут выполняться, как описано выше. Внешний контур может использоваться для оценки качества передачи данных, принимаемой в каждом пространственном канале, и для регулировки работы внутреннего контура. Качество передачи данных может быть определено количественно скоростью пакетных ошибок (СПО) (PER), метриками декодера и т.д. или их сочетанием. К примеру, внешний контур может регулировать сдвиг отношения С/Ш для каждого пространственного канала для достижения целевого значения СПО для этого пространственного канала. Внешний контур может также предписывать внутреннему контуру выбрать более низкую скорость передачи для пространственного канала, если для этого пространственного канала обнаруживаются избыточные пакетные ошибки.
Управление скоростью нисходящей линии
Каждый активный пользовательский терминал может оценивать канал нисходящей линии на основе пилот-сигнала МВхМВых, переданного по каналу ВСН в каждом кадре ДВР. Пункт доступа может также передавать управляемый эталон в ПБД FCH, посланном конкретному пользовательскому терминалу. С помощью пилот-сигнала МВхМВых по каналу ВСН и (или) управляемого эталона по каналу FCH пользовательский терминал может оценить отношение С/Ш в принятом сигнале и определить максимальную скорость передачи, которая может поддерживаться в канале FCH. Если пользовательский терминал работает в режиме пространственного мультиплексирования, то максимальная скорость может быть определена для каждой широкополосной собственной моды. Каждый пользовательский терминал может послать назад в пункт доступа максимальную скорость, поддерживаемую каждой широкополосной собственной модой (для режима пространственного мультиплексирования), максимальную скорость, поддерживаемую главной широкополосной собственной модой (для режима управления лучом) или максимальную скорость, поддерживаемую каналом МВхМВых (для режима разнесения) в поле Указатель скорости FCH в ПБД RCH. Эти скорости могут отображаться в отношения С/Ш для принятого сигнала, которые могут затем использоваться для выполнения вышеупомянутой процедуры создания избыточности. Альтернативно, пользовательский терминал может посылать назад достаточную информацию (например, отношения С/Ш для принятых сигналов), давая возможность пункту доступа определить максимальную скорость передачи, поддерживаемую нисходящей линией.
Определение того, используется ли режим разнесения, управления лучом или пространственного мультиплексирования, может быть выполнено на основе обратной связи от пользовательского терминала. Число широкополосных собственных мод, выбранных для использования, может увеличить развязку между управляющими векторами.
Фиг.14А иллюстрирует процесс управления скоростью передачи нисходящей линии для пользовательского терминала. ПБД ВСН передается в первом сегменте каждого кадра ДВР и включает в себя маяковый пилот-сигнал и пилот-сигнал МВхМВых, которые могут использоваться пользовательскими терминалами для оценки канала и слежением за каналом. Управляемый эталон может также быть послан в преамбуле ПБД FCH, посланного пользовательскому терминалу. Пользовательский терминал оценивает канал на основании МВхМВых и (или) управляемого эталона и находит максимальную(-ые) скорость(-и), которые могут поддерживаться нисходящей линией. Одна скорость передачи обеспечивается для каждой широкополосной собственной моды, если пользовательский терминал работает в режиме пространственного мультиплексирования. Пользовательский терминал затем посылает указатель скорости для FCH в поле Указатель скорости FCH в ПБД RCH, который он посылает пункту доступа.
Планировщик использует максимальную скорость, которую может поддерживать нисходящая линия для каждого активного пользовательского терминала, чтобы планировать передачу данных нисходящей линии в последующих кадрах ДВР. Скорости и другая информация назначения канала для пользовательского терминала отражаются в информационном элементе, посланном по каналу FCCH. Скорость передачи, назначенная одному пользовательскому терминалу, может воздействовать на планирование для остальных пользовательских терминалов. Минимальная задержка между определением скорости пользовательским терминалом и ее использованием равна, приблизительно, одному кадру ДВР.
С помощью упорядоченной процедуры Грам-Шмидта пункт доступа может точно определить максимальные скорости, поддерживаемые в канале FCH, непосредственно из преамбулы RCH. Это может затем существенно упростить управление скоростью.
Управление скоростью восходящей линии
Каждый пользовательский терминал передает управляемый эталон по каналу RACH во время доступа к системе и по каналу RCH после назначения ресурсов FCH/RCH. Пункт доступа может оценивать отношение С/Ш для принятого сигнала для каждой из широкополосных собственных мод на основе управляемого эталона в канале RCH и определять максимальную скорость, поддерживаемую каждой широкополосной собственной модой. Первоначально пункт доступа может не иметь хорошей оценки канала для обеспечения надежной работы на или вблизи максимальной скорости, поддерживаемой каждой широкополосной собственной модой. Чтобы улучшить надежность, начальная скорость, используемая в каналах FCH/RCH, может быть намного ниже, чем максимальная поддерживаемая скорость. Пункт доступа может интегрировать управляемый эталон по нескольким кадрам ДВР, чтобы получить улучшенную оценку канала. Когда оценка канала улучшается, скорость может быть увеличена.
Фиг.14В иллюстрирует процесс управления скоростью передачи восходящей линии для пользовательского терминала. После планирования передачи восходящей линии пользовательский терминал передает ПБД RCH, который включает в себя эталон, используемый пунктом доступа для нахождения максимальной скорости в восходящей линии. Планировщик затем использует максимальные скорости, которые восходящая линия может поддерживать для каждого активного пользовательского терминала, чтобы планировать передачу данных восходящей линии в последующих кадрах ДВР. Скорости и другая информация назначения канала для пользовательского терминала отражается в информационном элементе, посланном по каналу FCCH. Минимальная задержка между нахождением скорости пунктом доступа и ее использованием равна, приблизительно, одному кадру ДВР.
3. Управление мощностью
Управление мощностью может использоваться для передач в восходящей линии по каналу RCH (вместо управления скоростью) для услуг с фиксированной скоростью. Для услуг с фиксированной скоростью, скорость передачи согласуется при установлении вызова и остается фиксированной в течение длительности соединения. Некоторые услуги с фиксированной скоростью могут ассоциироваться с требованием ограниченной подвижности. В варианте осуществления управление мощностью реализуется для восходящей линии для противодействия помехам между пользовательскими терминалами, но не используется для нисходящей линии.
Механизм управления мощностью используется для управления мощностью передачи восходящей линии каждого активного пользовательского терминала, так что отношение С/Ш для принятого сигнала в пункте доступа поддерживается на уровне, который обеспечивает желательное качество услуги. Этот уровень часто называют целевым отношением С/Ш для принятого сигнала, рабочей точкой или уставкой. Для мобильного пользовательского терминала потери распространения будут, вероятно, изменяться по мере перемещения этого пользовательского терминала. Механизм управления мощностью отслеживает изменения в канале, так что отношение С/Ш в принимаемом сигнале поддерживается вблизи уставки.
Механизм управления мощностью может быть реализован двумя контурами управления мощностью - внутренним контуром и внешним контуром. Внутренний контур регулирует мощность передачи пользовательского терминала так, что отношение С/Ш для принимаемого сигнала в пункте доступа поддерживается вблизи уставки. Внешний контур регулирует уставку для реализации конкретного уровня функционирования, который может быть выражен количественно, посредством конкретной скорости кадровых ошибок (СКадрО) (FER) (например, 1% СКадрО), скорости пакетных ошибок (СПО), скорости блоковых ошибок (СБО) (BLER), скорости ошибок сообщений (СОМ) (MER) или какой-нибудь иной мерой.
Фиг.15 иллюстрирует работу внутреннего управления мощностью для пользовательского терминала. После того, как пользовательскому терминалу назначен канал FCH/RCH, пункт доступа оценивает отношение С/Ш для принятого сигнала в канале RCH и сравнивает его с уставкой. Начальная мощность, подлежащая использованию пользовательским терминалом, может быть найдена при установлении вызова и обычно лежит вблизи уровня максимальной мощности передачи. Для каждого кадрового интервала, если отношение С/Ш для принятого сигнала превышает уставку на конкретный положительный запас δ, пункт доступа может указать пользовательскому терминалу снизить его мощность передачи на конкретную величину (к примеру, 1 дБ) в информационном элементе FCCH, посланном этому пользовательскому терминалу. Наоборот, если отношение С/Ш для принятого сигнала ниже, чем порог минус запас δ, пункт доступа может указать пользовательскому терминалу увеличить мощность передачи на конкретную величину. Если отношение С/Ш для принятого сигнала находится в приемлемых пределах уставки, пункт доступа не будет запрашивать изменения в мощности передачи пользовательским терминалом. Мощность передачи восходящей линии задается как уровень начальной мощности передачи плюс сумма всех регулировок мощности, принятых от пункта доступа.
Начальная уставка в пункте доступа устанавливается, чтобы достичь конкретного уровня функционирования. Эта уставка регулируется внешним контуром на основании СКадрО или СПО для RCH. К примеру, если за конкретный временной период не происходит кадровых/пакетных ошибок, уставка может быть снижена на первую величину (например, 0,1 дБ). Если средняя СКадрО превышается появлением одной или более кадровых/пакетных ошибок, уставка может быть увеличена на вторую величину (например, 1 дБ). Уставка, запас по гистерезису и работа внешнего контура соответствует конкретной схеме управления мощностью, используемой в системе.
4. Управление синхронизацией
Управление синхронизацией может быть по преимуществу использовано в основанной на ДВР структуре кадров, где нисходящая линия и восходящая линия совместно используют одну и ту частотную полосу путем дуплексирования с временным разделением. Пользовательские терминалы могут располагаться повсюду в системе и, тем самым, могут ассоциироваться с различными задержками распространения к пункту доступа. Для того чтобы максимизировать эффективность в восходящей линии, синхронизация передачи восходящей линии по каналам RCH и RACH от каждого пользовательского терминала может регулироваться, чтобы учитывать задержку распространения. Это будет затем гарантировать, что передачи восходящей линии от различных пользовательских терминалов поступают в пункте доступа в конкретном временном окне и не создают помех друг другу в восходящей линии, либо передачам нисходящей линии.
Фиг.16 иллюстрирует процесс регулировки для синхронизации восходящей линии пользовательского терминала. Первоначально пользовательский терминал посылает ПБД RACH по восходящей линии, чтобы получить доступ к системе. Пункт доступа получает начальную оценку задержки подтверждения приема (ЗПП) (RTD), связанной с пользовательским терминалом. Задержка подтверждения приема может оцениваться на основании (1) скользящего коррелятора, используемого в пункте доступа для определения начала передачи, и (2) ИД временного интервала, включенного в ПБД RACH, посланный пользовательским терминалом. Пункт доступа затем вычисляет начальное опережение синхронизации для пользовательского терминала на основании начальной оценки ЗПП. Начальное опережение синхронизации посылается на пользовательский терминал перед его передачей по каналу RCH. Начальное опережение синхронизации может быть послано в сообщении по каналу FCH, в поле информационного элемента канала FCCH или иным образом.
Пользовательский терминал принимает начальное опережение синхронизации от пункта доступа и после этого использует это опережение синхронизации на всех последующих передачах восходящей линии как в канале RCH, так и в канале RACH. Если пользовательскому терминалу назначаются ресурсы FCH/RCH, его опережение синхронизации может регулироваться командами, посланными пунктом доступа в поле Регулировка синхронизации RCH информационного элемента канала FCCH. Пользовательский терминал будет после этого регулировать свои передачи восходящей линии по каналу RCH на основании текущего опережения синхронизации, которое равно начальному опережению синхронизации плюс все регулировки синхронизации, посланные пунктом доступа пользовательскому терминалу.
Различные части системы БЛВС МВхМВых и различные методы, описанные здесь, могут быть воплощены различными средствами. Например, обработка в пункте доступа и пользовательском терминале может воплощаться в аппаратном обеспечении, программном обеспечении или их сочетании. Для аппаратного воплощения обработка может быть реализована на одной или более интегральных схем прикладной ориентации (ASIC), цифровых сигнальных процессорах (DSP), цифровых сигнальных процессорных устройствах (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных блоках, разработанных для выполнения описанных здесь функций, или их сочетания.
Для программного воплощения обработка может быть реализована модулями (например, процедурами, функциями и т.д.), которые выполняют описанные здесь функции. Программные коды могут сохраняться в запоминающем блоке (к примеру, памяти 732 или 782 на фиг.7) и выполняться процессором (к примеру контроллером 730 или 780). Запоминающий блок может быть реализован внутри процессора или вне процессора, и в этом случае он может коммуникативно соединяться с процессором через различные средства, как известно в технике.
Заголовки включены сюда для ссылки и для простоты определения местонахождения некоторых разделов. Эти заголовки не предназначены для ограничения объема описанных в них концепций, а эти концепции могут иметь применение в других разделах описания.
Предшествующее описание раскрытых вариантов осуществления предназначено для обеспечения возможности специалисту реализовать или использовать настоящее изобретение. Различные модификации этих вариантов осуществления должны быть понятны специалистам в данной области техники, а основные определенные здесь принципы могут применяться в других вариантам осуществления без отхода от сущности и объема изобретения. Таким образом, настоящее изобретение не предназначено для ограничения показанными здесь вариантами осуществления, но должно соответствовать самому широкому объему, согласующемуся с раскрытыми принципами и новыми признаками.
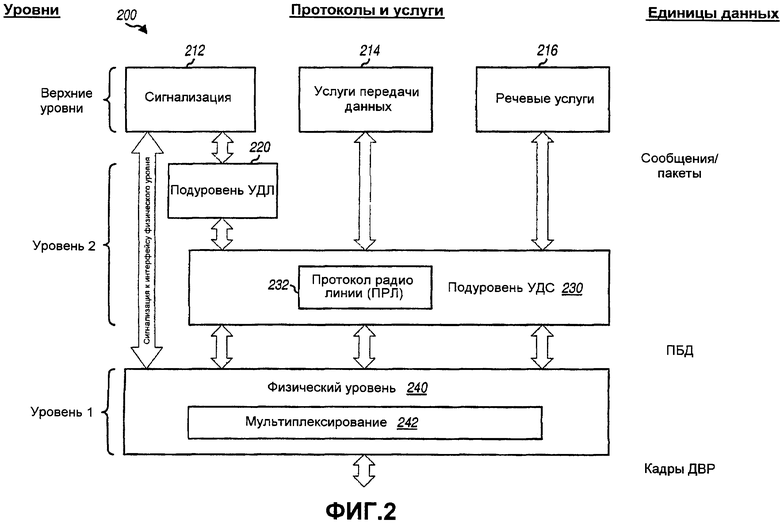
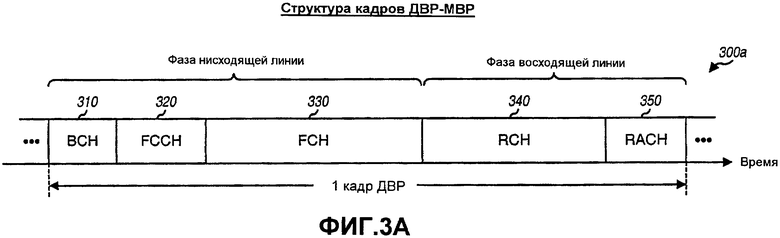
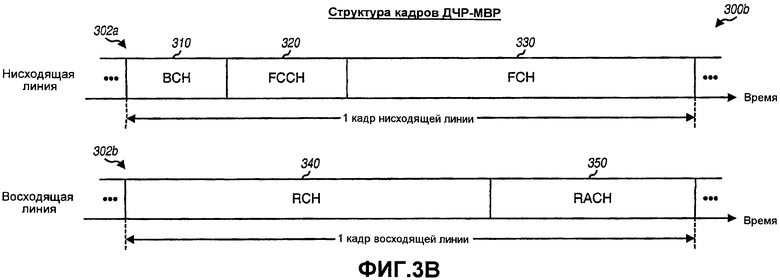
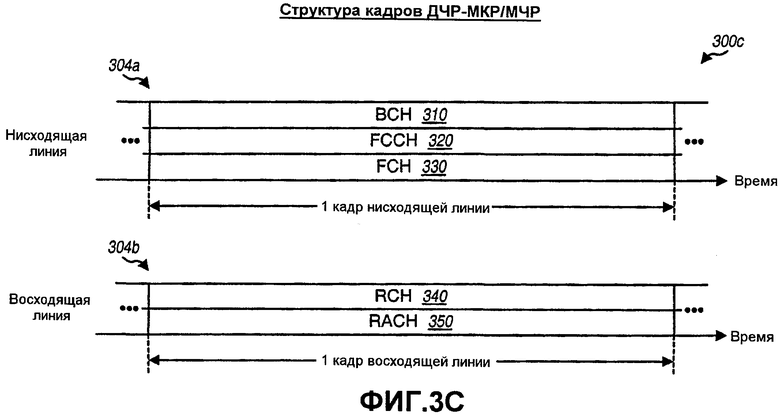
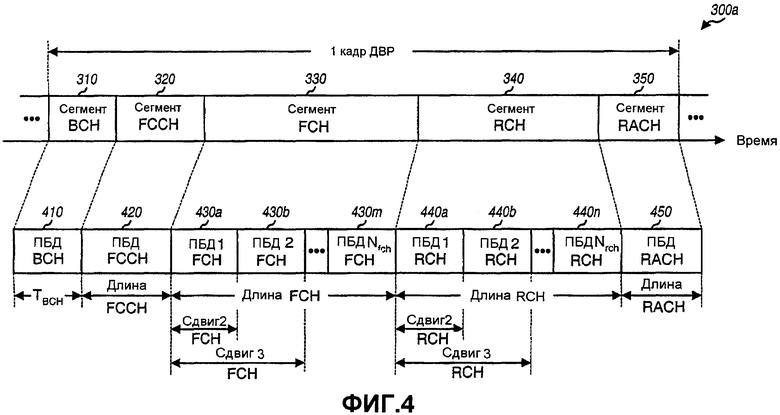
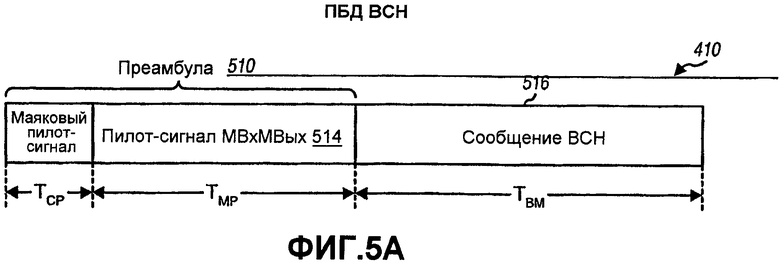
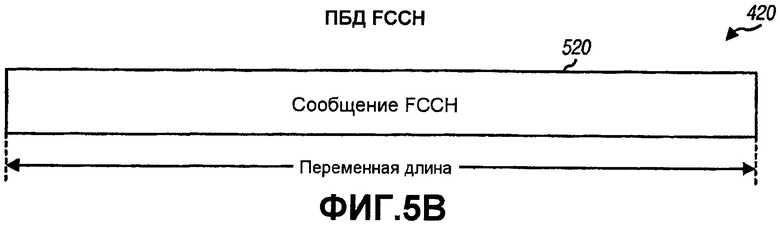
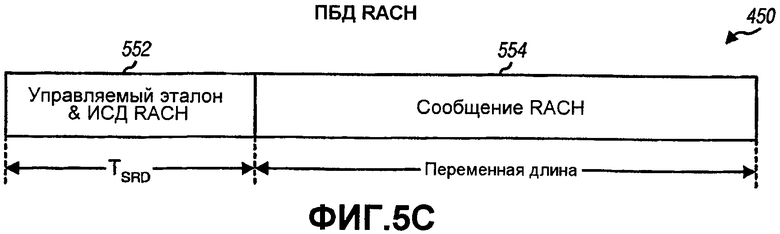
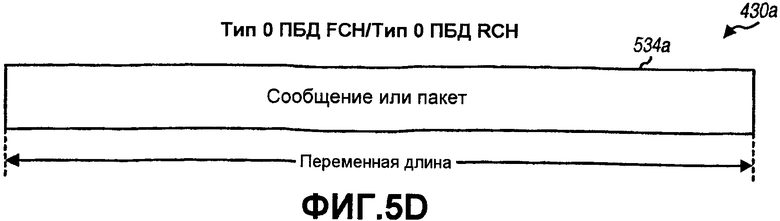
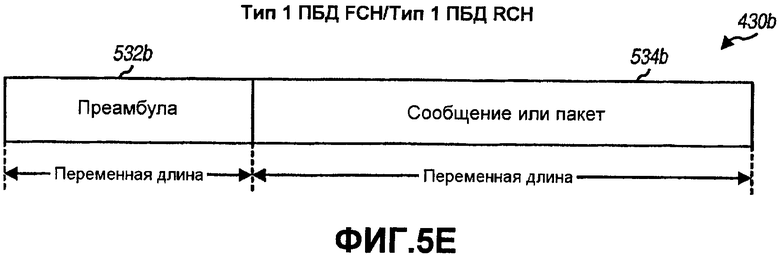
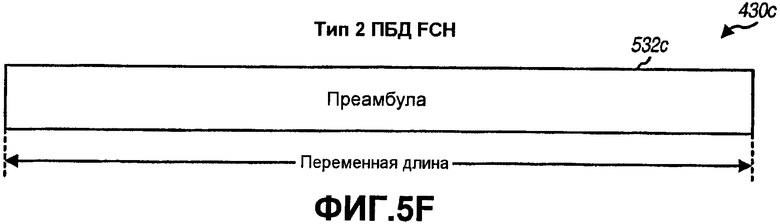
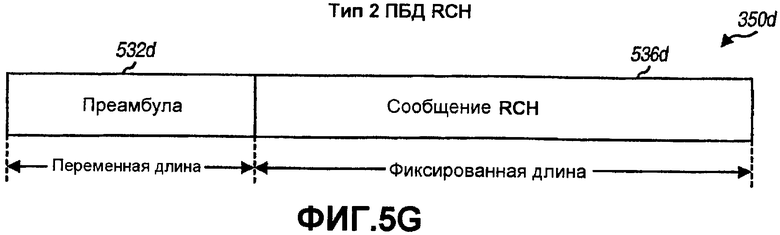
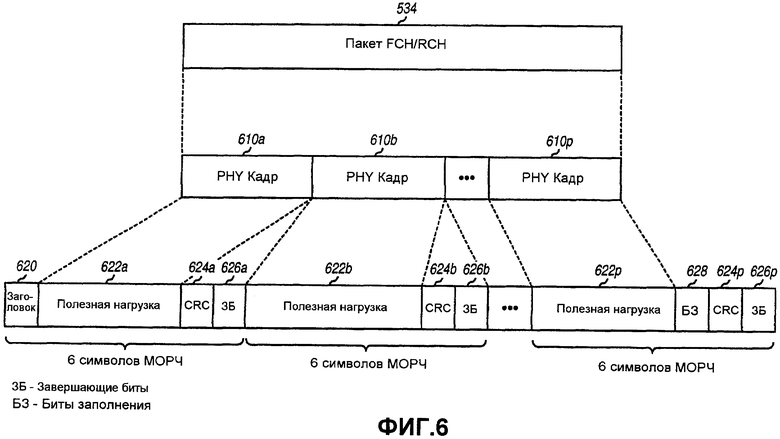
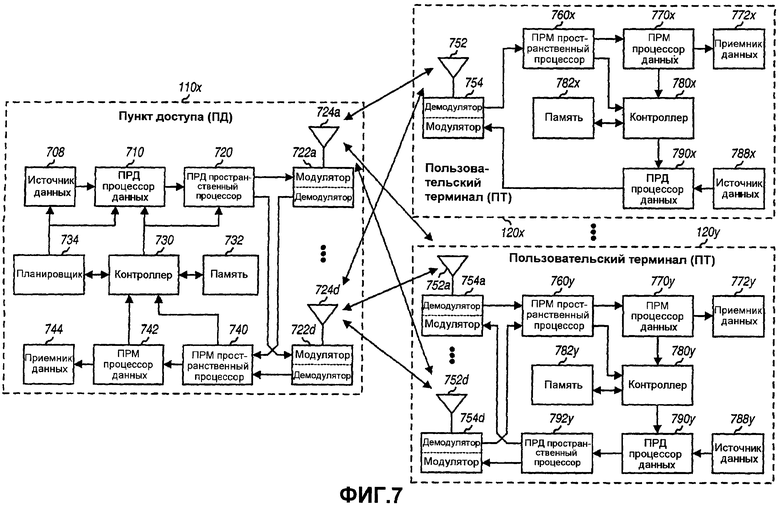
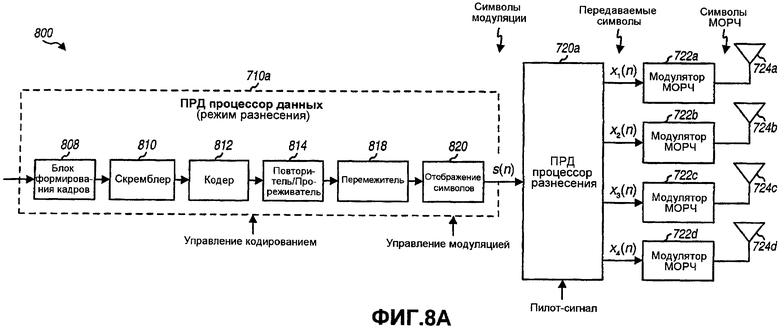
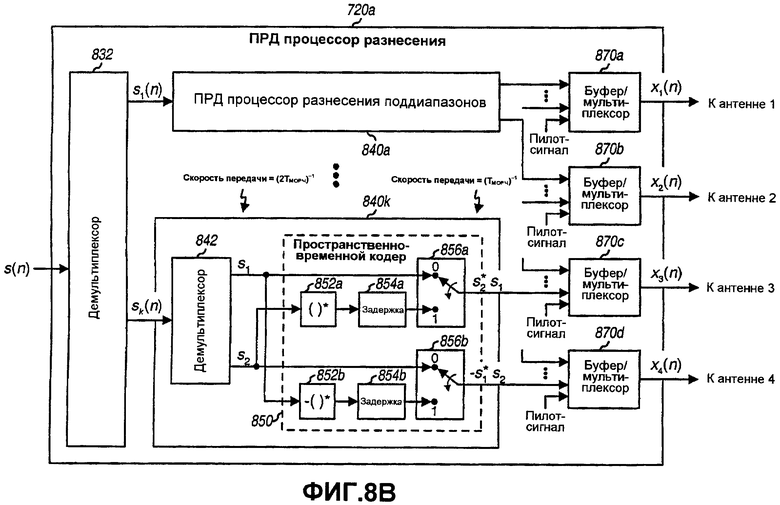
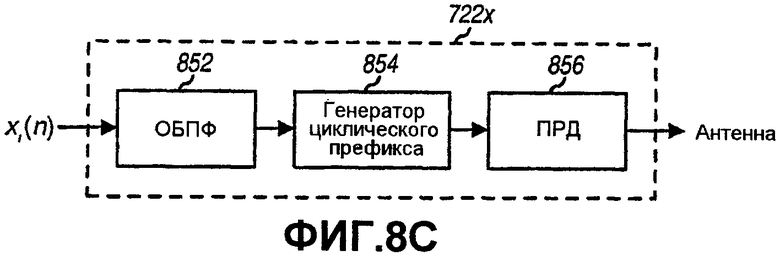
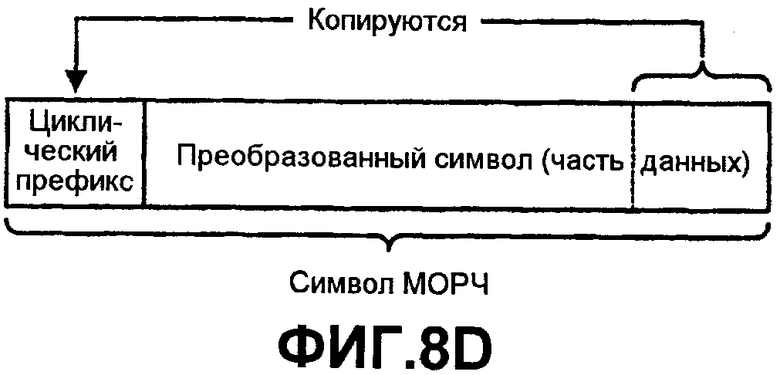
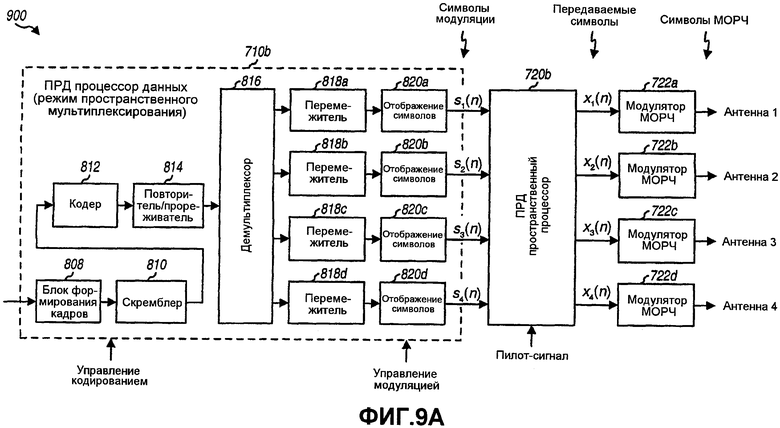
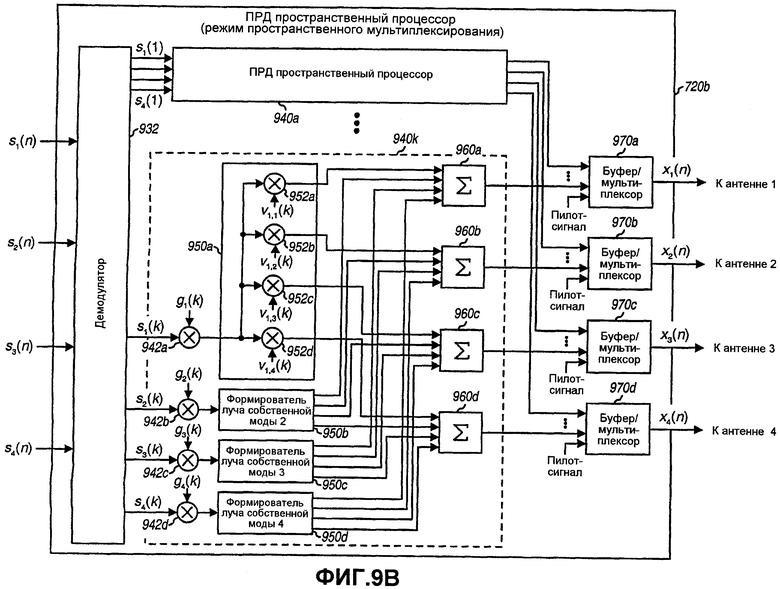
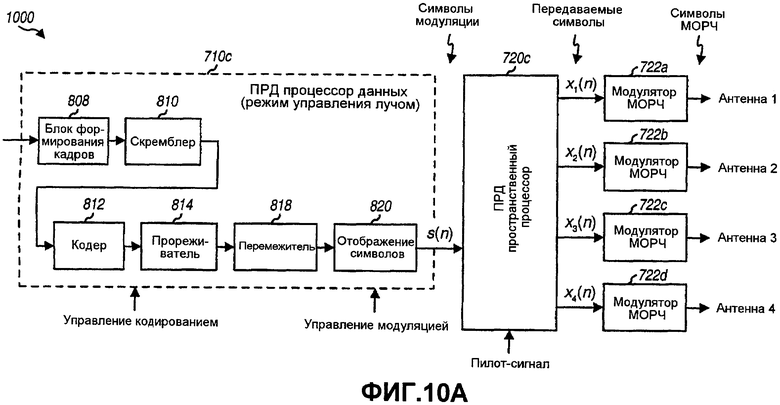
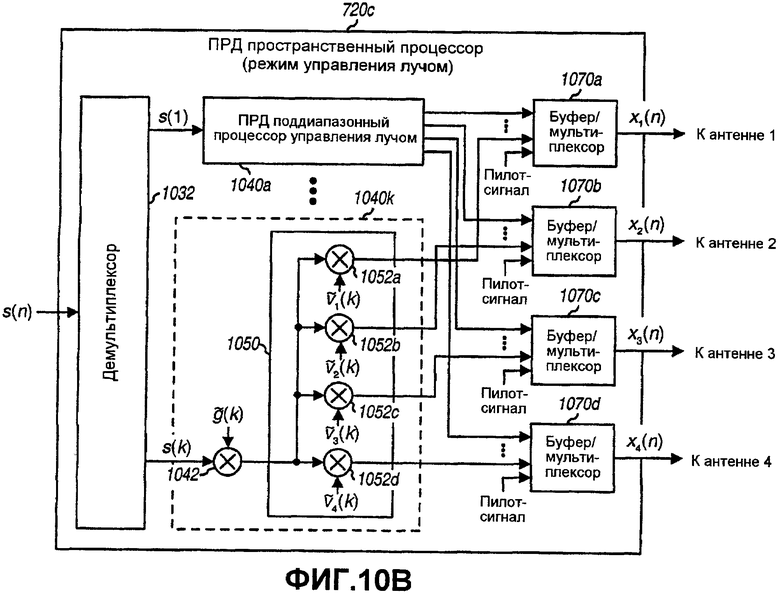
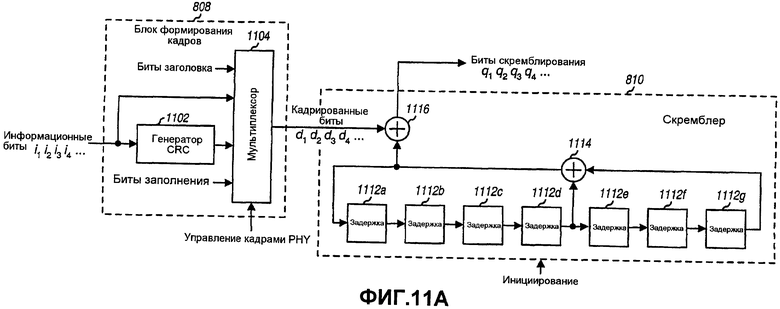
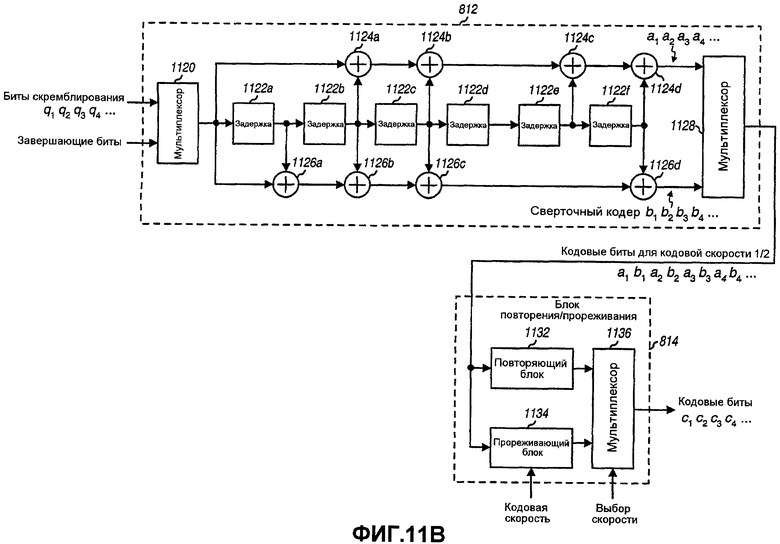
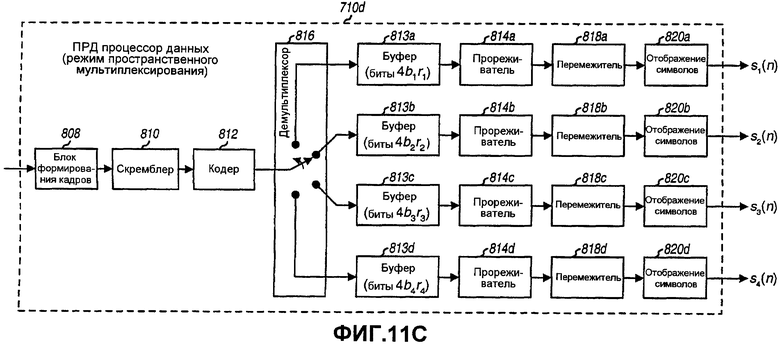
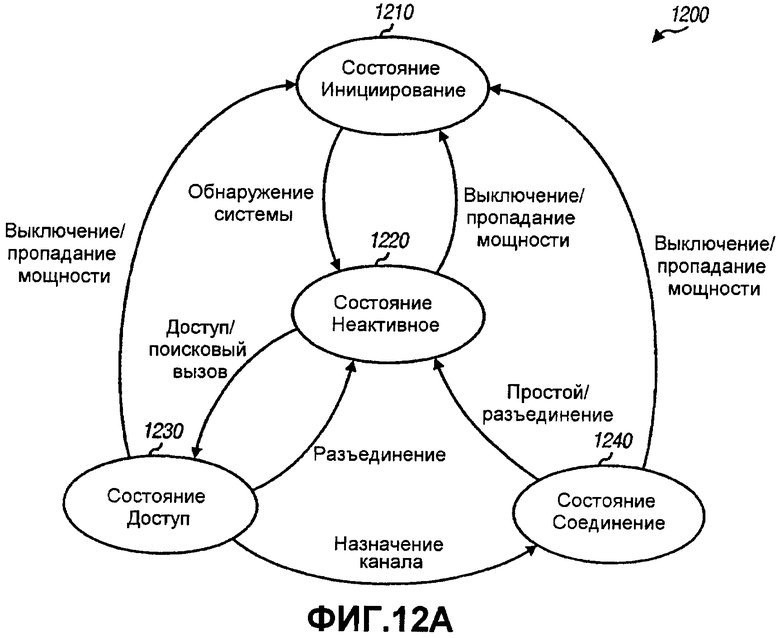
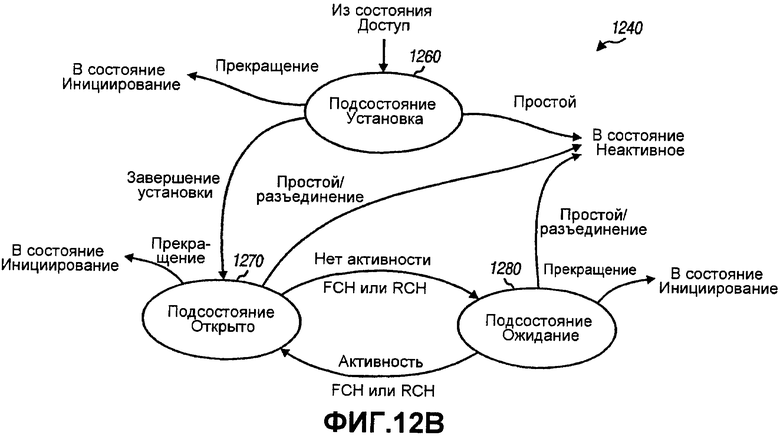

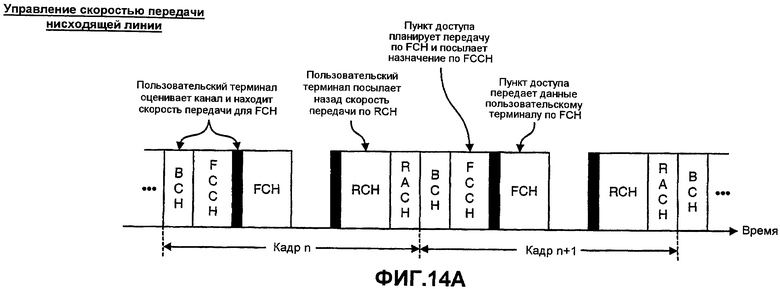
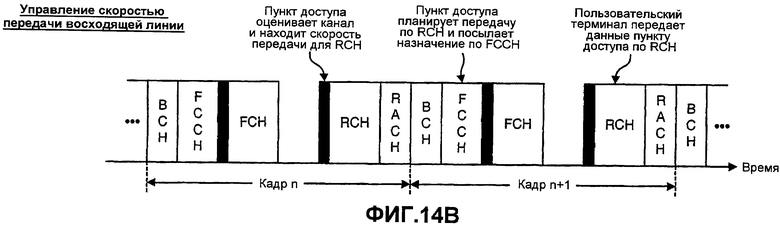
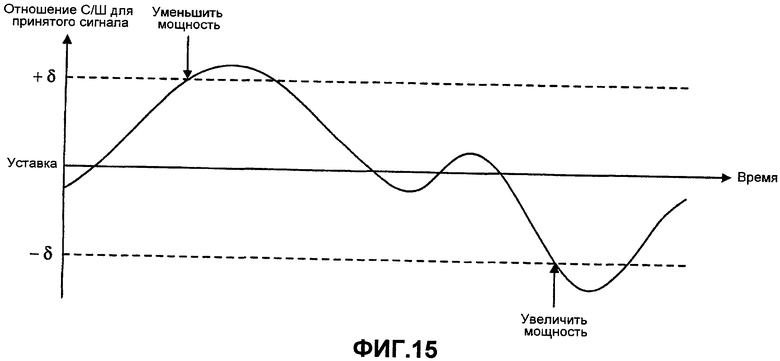
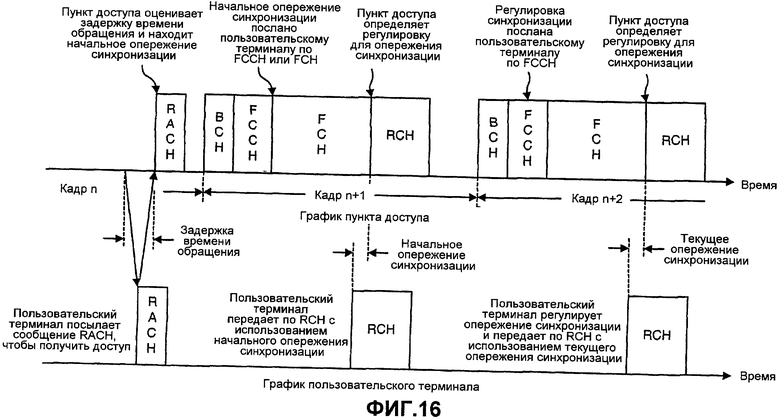
Изобретение относится к технике связи и может использоваться в системах беспроводной локальной вычислительной сети. Технический результат состоит в обеспечении множества скоростей передачи и режимов передачи. Для этого в системе применено мультиплексирование с ортогональным разделением частот (МОРЧ) и дуплексирование с временным разделением (ДВР). Система использует канальную структуру с несколькими конфигурируемыми транспортными каналами, поддерживает множество скоростей передачи и режимов передачи, которые можно конфигурировать на основе канальных условий и возможностей пользовательских терминалов, применяет пилотные структуры с несколькими типами пилот-сигнала (например, маяковый, управляемый эталон и пилот-сигнал несущей) для различных функций, реализует контуры управления скоростью передачи, синхронизацией и мощностью для надлежащей работы системы, и применяет случайный доступ для доступа к системе пользовательскими терминалами, быстрого подтверждения и быстрого назначения ресурсов. Может выполняться калибровка для учета различий в частотных откликах цепей передачи/приема в пункте доступа и пользовательских терминалах. Пространственная обработка затем может быть упрощена использованием преимуществ обратимого характера нисходящей и восходящей линий и калибровки. 6 н. и 24 з.п. ф-лы, 36 табл., 16 ил.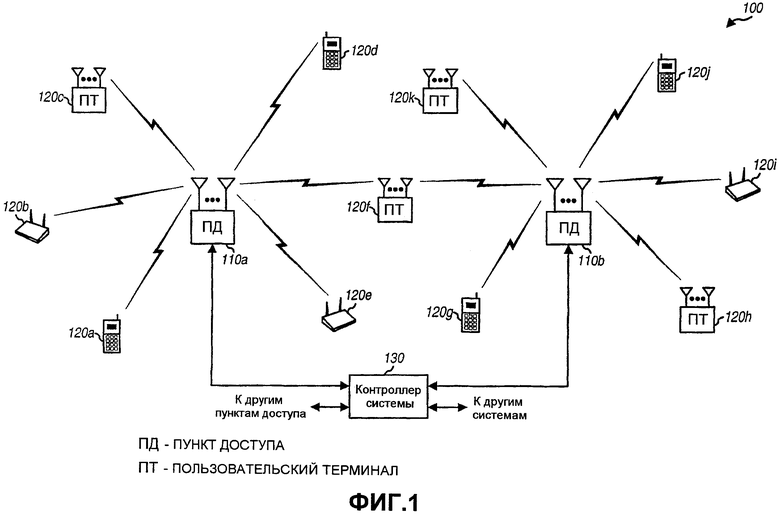
1. Способ обмена данными в системе беспроводной связи с множеством входов и множеством выходов (MIMO) с дуплексированием с временным разделением (TDD), содержащий: прием пилот-сигнала по восходящей линии связи от пользовательского терминала; получение, по меньшей мере, одного вектора управления для нисходящей линии связи для пользовательского терминала на основе принятого пилот-сигнала; и выполнение пространственной обработки с упомянутым, по меньшей мере, одним вектором управления, над первой передачей данных, посылаемой по нисходящей линии связи пользовательскому терминалу.
2. Способ по п.1, где один вектор управления получается для нисходящей линии связи для пользовательского терминала, и где пространственная обработка для управления лучом выполняется над первой передачей данных с упомянутым одним вектором управления для отправки первой передачи данных посредством одного пространственного канала нисходящей линии связи.
3. Способ по п.1, где множество векторов управления получаются для нисходящей линии связи для пользовательского терминала, и где пространственная обработка для пространственного мультиплексирования выполняется над первой передачей данных с упомянутым множеством векторов управления для отправки первой передачи данных посредством множества пространственных каналов нисходящей линии связи.
4. Способ по п.1, дополнительно содержащий: получение согласованного фильтра для восходящей линии связи для пользовательского терминала на основе принятого пилот-сигнала; и выполнение согласованной фильтрации второй передачи данных, принятой по восходящей линии связи от пользовательского терминала, с согласованным фильтром.
5. Способ по п.4, где согласованный фильтр содержит, по меньшей мере, один собственный вектор для, по меньшей мере, одной собственной моды восходящей линии связи, и где упомянутый, по меньшей мере, один собственный вектор для восходящей линии связи равен упомянутому, по меньшей мере, одному вектору управления для нисходящей линии связи.
6. Устройство для обмена данными в системе беспроводной связи с множеством входов и множеством выходов (MIMO) с дуплексированием с временным разделением (TDD), содержащее: пространственный процессор приема, работоспособный для приема пилот-сигнала по восходящей линии связи от пользовательского терминала; контроллер, работоспособный для получения, по меньшей мере, одного вектора управления для нисходящей линии связи для пользовательского терминала на основе принятого пилот-сигнала; и пространственный процессор передачи, работоспособный для выполнения пространственной обработки с упомянутым, по меньшей мере, одним вектором управления над первой передачей данных, посылаемой по нисходящей линии связи пользовательскому терминалу.
7. Устройство по п.6, где контроллер является работоспособным для получения одного вектора управления для нисходящей линии связи для пользовательского терминала, и где пространственный процессор передачи является работоспособным для выполнения пространственной обработки для управления лучом над первой передачей данных с упомянутым одним вектором управления для отправки первой передачи данных посредством одного пространственного канала нисходящей линии связи.
8. Устройство по п.6, где контроллер является работоспособным для получения множества векторов управления для нисходящей линии связи для пользовательского терминала, и где пространственный процессор передачи является работоспособным для выполнения пространственной обработки для пространственного мультиплексирования над первой передачей данных с упомянутым множеством векторов управления для отправки первой передачи данных посредством множества пространственных каналов нисходящей линии связи.
9. Устройство по п.6, где контроллер является дополнительно работоспособным для получения согласованного фильтра для восходящей линии связи для пользовательского терминала на основе принятого пилот-сигнала, и где пространственный процессор приема является дополнительно работоспособным для выполнения согласованной фильтрации второй передачи данных, принятой по восходящей линии связи от пользовательского терминала, с согласованным фильтром.
10. Устройство по п.9, где согласованный фильтр содержит, по меньшей мере, один собственный вектор для, по меньшей мере, одной собственной моды восходящей линии связи, и где упомянутый, по меньшей мере, один собственный вектор для восходящей линии связи равен упомянутому, по меньшей мере, одному вектору управления для нисходящей линии связи.
11. Устройство для обмена данными в системе беспроводной связи с множеством входов и множеством выходов (MIMO) с дуплексированием с временным разделением (TDD), содержащее: средство для приема пилот-сигнала по восходящей линии связи от пользовательского терминала; средство для получения, по меньшей мере, одного вектора управления для нисходящей линии связи для пользовательского терминала на основе принятого пилот-сигнала; и средство для выполнения пространственной обработки с упомянутым, по меньшей мере, одним вектором управления, над первой передачей данных, посылаемой по нисходящей линии связи пользовательскому терминалу.
12. Устройство по п.11, где один вектор управления получается для нисходящей линии связи для пользовательского терминала, и где пространственная обработка для управления лучом выполняется над первой передачей данных с упомянутым одним вектором управления для отправки первой передачи данных посредством одного пространственного канала нисходящей линии связи.
13. Устройство по п.11, где множество векторов управления получаются для нисходящей линии связи для пользовательского терминала, и где пространственная обработка для пространственного мультиплексирования выполняется над первой передачей данных с упомянутым множеством векторов управления для отправки первой передачи данных посредством множества пространственных каналов нисходящей линии связи.
14. Устройство по п.11, дополнительно содержащее: средство для получения согласованного фильтра для восходящей линии связи для пользовательского терминала на основе принятого пилот-сигнала; и средство для выполнения согласованной фильтрации второй передачи данных, принятой по восходящей линии связи от пользовательского терминала, с согласованным фильтром.
15. Устройство по п.14, где согласованный фильтр содержит, по меньшей мере, один собственный вектор для, по меньшей мере, одной собственной моды восходящей линии связи, и где упомянутый, по меньшей мере, один собственный вектор для восходящей линии связи равен упомянутому, по меньшей мере, одному вектору управления для нисходящей линии связи.
16. Способ передачи и приема пилот-сигналов в системе беспроводной связи с множеством входов и множеством выходов (MIMO), содержащий: передачу МIМО пилот-сигнала из множества антенн и по первой линии связи, где MIMO пилот-сигнал содержит множество передач пилот-сигнала, посылаемых из упомянутого множества антенн, и где передача пилот-сигнала из каждой антенны является идентифицируемой коммуникационным объектом, принимающим упомянутый MIMO пилот-сигнал; и прием подвергнутого управлению пилот-сигнала посредством, по меньшей мере, одной собственной моды второй линии связи от коммуникационного объекта, где подвергнутый управлению пилот-сигнал генерируется на основе упомянутого MIMO пилот-сигнала.
17. Способ по п.16, где первая линия связи является восходящей линией связи, вторая линия связи является нисходящей линией связи, и коммуникационный объект является точкой доступа.
18. Способ по п.16, где первая линия связи является нисходящей линией связи, вторая линия связи является восходящей линией связи, и коммуникационный объект является пользовательским терминалом.
19. Способ по п.16, где передача пилот-сигнала из каждой антенны ассоциирована с разным ортогональным кодом.
20. Способ по п.16, где подвергнутый управлению пилот-сигнал принимается посредством одной собственной моды второй линии связи и передается при полной мощности передачи из множества антенн в коммуникационном объекте.
21. Способ по п.16, где подвергнутый управлению пилот-сигнал принимается посредством множества собственных мод второй линии связи.
22. Способ по п.16, где подвергнутый управлению пилот-сигнал передается коммуникационным объектом для временной продолжительности, конфигурируемой системой.
23. Устройство для обмена данными в системе беспроводной связи с множеством входов и множеством выходов (MIMO), содержащее: пространственный процессор передачи, работоспособный для генерирования MIMO пилот-сигнала для передачи из множества антенн и по первой линии связи, где MIMO пилот-сигнал содержит множество передач пилот-сигнала, посылаемых из упомянутого множества антенн, и где передача пилот-сигнала из каждой антенны является идентифицируемой коммуникационным объектом, принимающим упомянутый MIMO пилот-сигнал; и пространственный процессор приема, работоспособный для обработки подвергнутого управлению пилот-сигнала, принятого посредством, по меньшей мере, одной собственной моды второй линии связи от коммуникационного объекта, где подвергнутый управлению пилот-сигнал генерируется на основе MIMO пилот-сигнала.
24. Устройство по п.23, где передача пилот-сигнала из каждой антенны ассоциирована с разным ортогональным кодом.
25. Устройство по п.23, где подвергнутый управлению пилот-сигнал принимается посредством одной собственной моды второй линии связи и передается при полной мощности передачи из множества антенн в коммуникационном объекте.
26. Устройство по п.23, где подвергнутый управлению пилот-сигнал принимается посредством множества собственных мод второй линии связи.
27. Устройство для обмена данными в системе беспроводной связи с множеством входов и множеством выходов (MIMO), содержащее: средство для передачи MIMO пилот-сигнала из множества антенн и по первой линии связи, где MIMO пилот-сигнал содержит множество передач пилот-сигнала, посылаемых из упомянутого множества антенн, и где передача пилот-сигнала из каждой антенны является идентифицируемой коммуникационным объектом, принимающим упомянутый MIMO пилот-сигнал; и средство для приема подвергнутого управлению пилот-сигнала посредством, по меньшей мере, одной собственной моды второй линии связи от коммуникационного объекта, где подвергнутый управлению пилот-сигнал генерируется на основе упомянутого MIMO пилот-сигнала.
28. Устройство по п.27, где передача пилот-сигнала из каждой антенны ассоциирована с разным ортогональным кодом.
29. Устройство по п.27, где подвергнутый управлению пилот-сигнал принимается посредством одной собственной моды второй линии связи и передается при полной мощности передачи из множества антенн в коммуникационном объекте.
30. Устройство по п.27, где подвергнутый управлению пилот-сигнал принимается посредством множества собственных мод второй линии связи.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВЗВЕШИВАНИЯ СИГНАЛОВ НА ТРАКТЕ РАДИОПЕРЕДАЧИ (ВАРИАНТЫ) | 1997 |
|
RU2141168C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

