Изобретение относится к области машиностроения и может быть использовано в системах управления транспортными средствами, в частности в качестве устройства, задающего по команде машиниста режим работы силового оборудования.
Известен контроллер с ручным управлением [RU 76747, опубликован 27.08.2008]. Он содержит корпус, орган управления, блок датчиков, жестко закрепленный на корпусе контроллера, механизм фиксации, состоящий из подпружиненного рычага, закрепленного на каретке с возможностью перемещения его плеча по профильной планке, установленной на корпусе контроллера. Механизм стопорения каретки выполнен в виде установленной в корпусе рукоятки подпружиненной кнопки с толкателем, причем толкатель упирается в верхнюю часть коромысла, закрепленного с возможностью поворота на стойке каретки. Нижняя часть коромысла расположена напротив свободного плеча упорного рычага, установленного с возможностью поворота на каретке. Подпружиненный конец упорного рычага каретки упирается в упор, жестко закрепленный на корпусе контроллера, магнит установлен в корпусе каретки, в рабочем положении рукоятки контроллера магнит располагается с зазором напротив одного из датчиков.
Наиболее близким по технической сущности является контроллер [RU 2374717 C1, опубл. 27.11.2009], который содержит корпус, крышку, рукоятку, блок датчиков, подпружиненный фиксатор и вал. В корпусе контроллера установлен барабан, с жестко закрепленным на нем упором и пазом с фигурным профилем, причем паз выполнен либо на одной, либо на обеих сторонах барабана. На валу в барабане подвижно закреплена вилка, соединенная с рукояткой, в которой установлены подпружиненные толкатель и стержень, опирающийся верхним концом на толкатель, а нижним - в упор, жестко закрепленный на барабане.
Подпружиненные фиксаторы расположены на внутренней поверхности вилки, причем блок датчиков установлен на корпусе контроллера, а магнит закреплен на внешней поверхности вилки так, что в рабочем положении рукоятки он располагается с зазором напротив соответствующего магниточувствительного датчика блока датчиков.
Недостатками этих контроллеров являются:
- большая материалоемкость;
- большая трудоемкость изготовления.
Техническим результатом предлагаемого изобретения является снижение материалоемкости, трудоемкости изготовления, повышение надежности контроллера, увеличение срока его службы за счет магнитной фиксации и бесконтактной коммутации электрических цепей.
Сущность изобретения состоит в том, что контроллер содержит корпус, крышку, блок датчиков, закрепленный на корпусе контроллера, подпружиненный фиксатор, упор, магнит и рукоятку контроллера, в которой установлены подпружиненные толкатель и стержень, опирающийся нижним концом на упор, а верхним концом на толкатель. Магнит в рабочем положении рукоятки контроллера располагается с зазором напротив соответствующего магниточувствительного датчика блока датчиков.
Новым в предлагаемом изобретении является то, что упор жестко закреплен на корпусе, в котором установлены либо одна, либо две оси, содержащие паз с фигурным профилем. Либо на одной, либо на двух осях подвижно закреплена каретка, соединенная с рукояткой, подпружиненные фиксаторы расположены внутри каретки, а магнит закреплен на внешней поверхности каретки.
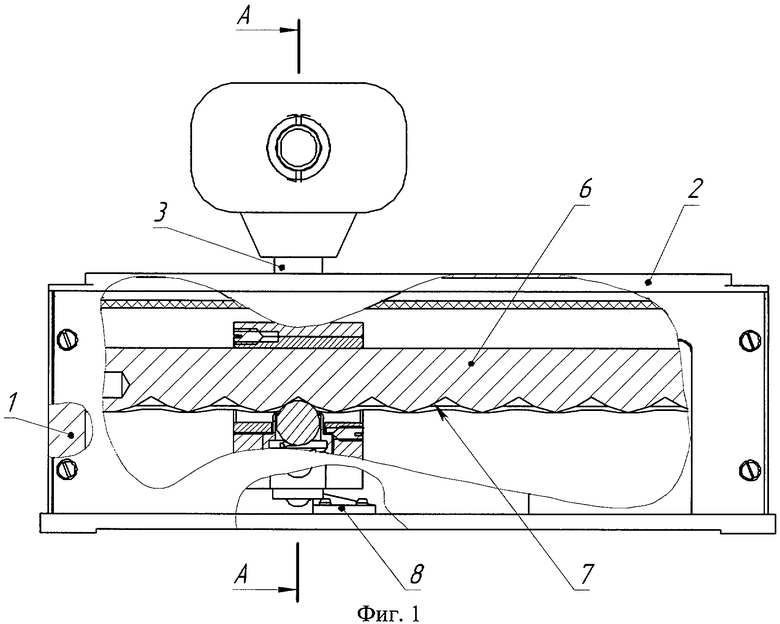
На фиг.1 изображена конструкция контроллера.
На фиг.2 представлен разрез АА контроллера.
Контроллер состоит из корпуса 1, крышки 2, рукоятки 3, блока датчиков 4, подпружиненных фиксаторов 5, упора 8. В рукоятке контроллера установлены подпружиненный толкатель 12 и стержень 11, который верхним концом опирается на толкатель 12, блок датчиков 4 установлен на корпусе контроллера, магнит 10 в рабочем положении рукоятки контроллера располагается с зазором напротив одного из магниточувствительных датчиков.
В корпусе 1 контроллера установлена либо одна, либо две оси 6, содержащие паз 7 с фигурным профилем, выполненным либо на одной, либо на обеих осях, например, в форме волны с впадинами и вершинами. На них подвижно закреплена каретка 9, соединенная с рукояткой 3. Стержень 11, установленный в рукоятке 3 контроллера, нижним концом опирается в упор 8, выполненный, например, со скосом и жестко закрепленный в корпусе 1, подпружиненные фиксаторы 5 расположены внутри каретки, магнит 10 закреплен на внешней поверхности каретки 9.
Контроллер работает следующим образом:
Изначально рукоятка 3 находится в нейтральном положении, при этом в силу того, что ось 6, имеющая паз 7 с фигурным профилем, имеет впадины и вершины, подпружиненные фиксаторы 5 под действием пружины занимают устойчивое состояние во впадине паза, фиксируя положение рукоятки 3. Подпружиненный стержень 11 внутри рукоятки 3 упирается в упор 8, жестко закрепленный в корпусе 1. При нажатии на подпружиненный толкатель 12 и приложении к рукоятке 3 усилия в направлении от себя, подпружиненный стержень 11 поднимается вверх и проходит над упором 8, обеспечивая перемещение рукоятки 3 в необходимое положение.
Для изменения режима работы транспортного средства оператор, прикладывая усилия к рукоятке 3 в направлении от себя, перемещает ее в необходимое положение.
Так как ось 6 имеет паз 7 с фигурным профилем, выполненным в виде волны с впадинами и вершинами, то при горизонтальном перемещении рукоятки 3 усилие перемещения вначале возрастает, а после прохождения ею вершины фигурного паза снижается. Вследствие чего подпружиненные фиксаторы 5 занимают другое состояние, во впадине фигурного паза, фиксируя положение рукоятки 3, которая при этом переходит в следующее рабочее положение.
При перемещении рукоятки 3 контроллера и, следовательно, каретки 9, из одного фиксированного положения в другое, магнит 10 поочередно устанавливается напротив одного из магниточувствительных датчиков блока датчиков 4, соответствующих этому положению рукоятки.
При этом срабатывает лишь тот датчик, напротив которого устанавливается магнит 10, и датчики блока датчиков 4 выдают на систему управления транспортного средства сигналы управления тяговыми двигателями ходовые сигналы XI…XN.
После установки рукоятки 3 контроллера в крайнее положение до упора в корпус 1, затем ее перемещения в противоположном направлении, происходит переключение ходовых позиций от XN до XI. После перехода рукоятки 3 через нейтральное положение и движения ее до упора в корпус происходит переключение тормозных позиций TI…TN.
При проходе рукояткой 3 нейтрального положения нижний конец подпружиненного стержня 11 скользит по упору 8, выполненному, например, со скосом, который не препятствует его движению. При этом в позициях TI…TN магниточувствительные датчики блока 4 выдают на систему управления транспортного средства сигналы для торможения.
При выводе рукоятки 3 в нейтральное положение из положений TN…TI подпружиненный стержень 11 внутри рукоятки 3 упирается в упор 8, расположенный в корпусе, и движение рукоятки 3 стопорится.
Таким образом, осуществляется блокировка контроллера при переходе из тормозных позиций в ходовые позиции.
Высокая надежность, большой срок службы, снижение материалоемкости и трудоемкости изготовления достигаются в предлагаемом контроллере за счет механической фиксации и бесконтактной коммутации электрических цепей.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР | 2008 |
|
RU2374717C1 |
| КОНТРОЛЛЕР | 2005 |
|
RU2286898C1 |
| КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2210127C2 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| Узел подвески электрода рудно-термической печи | 1986 |
|
SU1453628A1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2012 |
|
RU2491459C1 |
| УСТРОЙСТВО ДЛЯ СПАСЕНИЯ ЛЮДЕЙ | 2013 |
|
RU2513859C1 |
| Устройство для запрессовки стержней | 1974 |
|
SU1184676A1 |
| Устройство для установки магниточувствительных шпилек на шаблоне установки для раскладки проводов в шгут | 1990 |
|
SU1780203A1 |
| КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2349981C2 |
Изобретение относится к области машиностроения и может быть использовано в системах управления транспортными средствами, в частности, в качестве устройства, задающего по команде машиниста режим работы силового оборудования. Контроллер содержит корпус, крышку, блок датчиков, закрепленный на корпусе контроллера, подпружиненный фиксатор, упор, магнит и рукоятку контроллера, в которой установлены подпружиненные толкатель и стержень, опирающийся нижним концом на упор, а верхним концом на толкатель. Магнит в рабочем положении рукоятки контроллера располагается с зазором напротив соответствующего магниточувствительного датчика блока датчиков. Упор жестко закреплен на корпусе, в котором установлены либо одна, либо две оси, содержащие паз с фигурным профилем. Причем, либо на одной, либо на двух осях подвижно закреплена каретка, соединенная с рукояткой, подпружиненные фиксаторы расположены внутри каретки, а магнит закреплен на внешней поверхности каретки. Технический результат - снижение материалоемкости и трудоемкости изготовления, повышение надежности контроллера и увеличение срока его службы за счет магнитной фиксации и бесконтактной коммутации электрических цепей. 2 ил.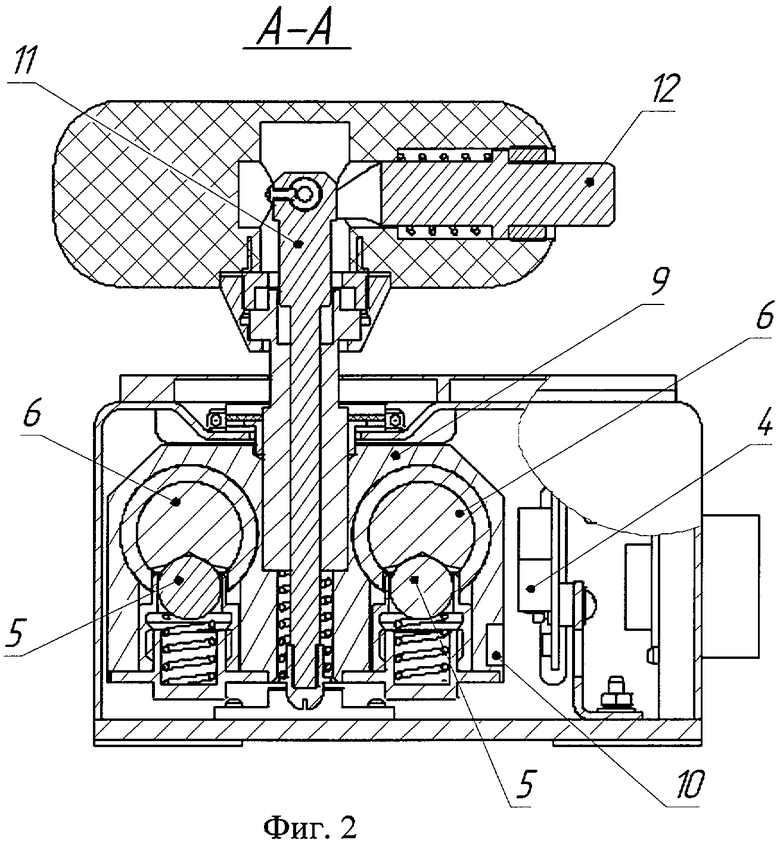
Контроллер, содержащий корпус, крышку, блок датчиков, закрепленный на корпусе контроллера, подпружиненный фиксатор, упор, магнит и рукоятку контроллера, в которой установлены подпружиненные толкатель и стержень, опирающийся нижним концом на упор, а верхним концом на толкатель, магнит в рабочем положении рукоятки контроллера располагается с зазором напротив соответствующего магниточувствительного датчика блока датчиков, отличающийся тем, что упор жестко закреплен на корпусе, в котором установлены либо одна, либо две оси, содержащие паз с фигурным профилем, причем либо на одной, либо на двух осях подвижно закреплена каретка, соединенная с рукояткой, подпружиненные фиксаторы расположены внутри каретки, а магнит закреплен на внешней поверхности каретки.
| КОНТРОЛЛЕР | 2008 |
|
RU2374717C1 |
| Гидравлическая турбопередача | 1947 |
|
SU76747A1 |
| US 4187483 A, 05.02.1980 | |||
| US 4458226 A, 03.07.1984. | |||

