Изобретение относится к органам управления работой экскаватора, где требуется надежность и достоверность формирования команд управления от оператора.
Известна полезная модель «Устройство ручного управления подвижным объектом» по патенту РФ №37068 с датой публикации 10.04.2004, предназначенная для формирования электрических сигналов как раздельно, так и одновременно по трем взаимно перпендикулярным каналам управления в ручных электродистанционных системах управления подвижными наземными объектами. Устройство содержит корпус, рукоятку, кинематически связанную посредством трехстепенного карданного узла с пружинными механизмами загрузки и электрическими датчиками, формирующими сигналы по трем взаимно перпендикулярным каналам управления. Электрические датчики по трем каналам управления установлены на единой плате, неподвижно закрепленной к нижней части корпуса с возможностью обеспечения 2÷4-кратного резервирования электрических сигналов.
Известна полезная модель «Двухкоординатный командоаппарат» по патенту РФ №53468 с датой публикации 10.05.2006, относящаяся к дистанционным устройствам управления, в частности, к устройствам систем дистанционного управления последовательно или одновременно по осям X и Y подвижными наземными объектами. Двухкоординатный командоаппарат содержит корпус с установленным в нем цилиндрическим рычагом управления, конец которого сопряжен с шаровым подшипником и продольными пазами двух качающихся рычагов, оси качающихся рычагов размещены в одной горизонтальной плоскости взаимно перпендикулярно и задатчики. В командоаппарат введены основание, регулировочные элементы, установленные в корпусе упругий обжимающий элемент, резьбовую втулку и подпружинивающий элемент, зубчатую передачу, выполненную в виде зубчатых секторов, жестко зафиксированных на осях, находящихся в зацеплении с зубчатыми колесами, размещенные на осях задатчиков, при этом шаровой подшипник установлен в обжимающем упругом элементе, который внутренней поверхностью взаимодействует со сферической поверхностью шарового подшипника, внешней боковой поверхностью - с резьбовой втулкой, а нижней торцевой поверхностью - с подпружинивающим элементом, расположенным между нижней торцевой поверхностью обжимающего упругого элемента и днищем корпуса, при этом качающиеся рычаги взаимодействуют с задатчиками, посредством зубчатой передачи, зубчатые сектора, которой жесткими упорами взаимодействуют с упругими элементами, а также с регулировочными элементами в момент положения рычага управления в его крайних положениях, кроме того, задатчики установлены в основании, закрепленном на корпусе. Подпружинивающий элемент выполнен в виде волнообразной пружины. Регулировочные элементы выполнены в виде винтов.
Известно изобретение «Рукоятка боковой ручки органа управления» по патенту РФ №2638049 с датой публикации 11.12.2017, относящееся в целом к рукояткам боковой ручки органа управления, которые с пользой предоставлены как интерфейс оператора для разных устройств, чтобы позволить оператору осуществлять различные вводы сигналов ручного управления. Рукоятка боковой ручки органа управления содержит основание, продолговатую стойку рукоятки, простирающуюся вверх от основания, головку у верхней концевой части стойки рукоятки, и поверхность опоры большого пальца, простирающуюся вбок и вверх относительно стойки рукоятки. Головка включает в себя разделенную лицевую поверхность, ограничивающую внутреннюю лицевую поверхность и наружную лицевую поверхность, расположенные в плане рядом друг с другом, и внутреннюю нажимную кнопку и наружную нажимную кнопку соответственно, причем плоские верхние поверхности упомянутой внутренней нажимной кнопки и упомянутой наружной нажимной кнопки, соответственно, образуют между ними угол от 10 до 15 градусов.
Известен магнитный джойстик из патента РФ №171081 на полезную модель с датой публикации 19.05.2017, относящийся к области устройств дистанционного управления техническими объектами, а именно к джойстикам, основанным на использовании магнитных сенсоров, реагирующих на изменение магнитного потока при изменении положения задающего органа управления. Магнитный джойстик содержит магнитный шар с закрепленным на одном из его магнитных полюсов рычагом, установленный в немагнитном корпусе с возможностью поворота, и два магниточувствительных датчика, закрепленных на немагнитном корпусе. При этом магнитный шар опирается на коническую поверхность фаски отверстия в немагнитном корпусе, в котором соосно с этим отверстием закреплен ферромагнитный стержень.
Известен контроллер для управления транспортным средством из патента РФ №186307 на полезную модель, относящийся к железнодорожному транспорту, к устройствам для управления тяговыми двигателями и тормозным оборудованием транспортного средства, а именно к контроллерам «тяга-торможение». Контроллер содержит корпус, крышку, установленную в прорези крышки поворотную рукоять с диском, жестко закрепленным на установленном в подшипниках в корпусе валу, соединенный посредством зубчатой передачи с последним привод рукояти механизм управления приводом, фиксатор рукояти, смонтированные на одном конце вала датчики его углового перемещения, разъемы. Привод рукояти выполнен в виде электродвигателя малошагового, механизм управления приводом выполнен в виде соединенного с подпружиненной кнопкой и размещенного в рукояти штока с магнитом на его нижнем конце и электронных плат, связанных с электродвигателем малошаговым, разъемом и платами датчиков углового перемещения вала, выполненными в виде магнитов, фиксатор рукояти, выполнен в виде смонтированного на другом конце вала рукояти кулачка и закрепленного на корпусе с рычажно-пружинного механизма. На корпусе установлены разъемы для подсоединения к соответствующей схеме управления транспортным средством в режиме «одиночного движения» или «движение с поездом» и выбора режима, а также на крышке с двух сторон от прорези для рукояти нанесены шкалы и вмонтированы индикаторы режима работы.
Известна полезная модель «Джойстик для управления подвижным объектом» по патенту РФ №202708 с датой публикации 03.03.2021. Полезная модель может быть использована в качестве средства ручного управления для подвижных объектов, частями их оборудования. Джойстик содержит продолговатую рукоятку, верхняя концевая часть которой снабжена головкой с размещенными на ее лицевой стороне кнопками, датчик положения, способный измерять отклонение рукоятки, основание, в котором размещена плата управления, связанная с кнопками и датчиком положения, в боковой поверхности рукоятки выполнены выемки для пальцев и кистевой упор в виде горизонтальной полки, при этом кнопки на головке рукоятки размещены на траектории движении большого пальца и часть из них выполнена с различающейся друг от друга фактурой поверхности. Дополнительно джойстик может содержать по меньшей мере одну кнопку, размещенную на боковой поверхности рукоятки.
Недостатком вышеуказанных технических решений является отсутствие защищенности устройства ввода команд от действия угольной пыли.
Из уровня техники известна полезная модель «Колонка для джойстика экскаваторной установки» по патенту РФ №214595 с датой публикации 07.11.2022, относящаяся к органам управления экскаваторной установки. Колонка для джойстика экскаваторной установки представляет собой короб прямоугольной формы, выполненный с возможностью передвижения вперед-назад, который состоит из двух профилей, выполненных П-образными разной ширины для возможности размещения одного в другой, крышки и основания, выполненного в форме квадратной трубы со скошенной вперед верхней частью, при этом места соединения профилей между собой, соединения профилей с крышкой и основанием являются точками шарнирного соединения, в которых крепление обеспечивается болтами и самоконтрящимися гайками, на переднем профиле установлен поворотный клапан фиксатора положения колонки, обеспечивающий управление механизмом изменения положения колонки посредством пневматического цилиндра, закрепленного внутри короба к профилям.
Недостатком колонки для джойстика экскаваторной установки является ограничение функциональных возможностей, т.к. рукоятка может выполнять только одно движение, управление гидравликой вперед-назад.
Известно устройство ввода команд по патенту РФ №2679751 с датой публикации 12.02.2019. Устройство ввода команд содержит два привода, в каждом из которых установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик. Устройство содержит механизм самовозврата с пружиной кручения, держатель двух магнитов, закрепленный на поворотной оси рукоятки, три канала бесконтактных датчиков угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, при этом микросхемы с датчиками Холла размещены на платах датчиков угла и объединены в трехканальный блок датчиков угла, причем все три канала датчиков угла каждого привода соединены с одной общей платой модуля контроллера, в состав которого входят три канала контроллера со своими источниками питания, схема мажоритации по двум состояниям из трех, электронные ключи формирования команд. Устройство ввода команд может быть выполнено с трехкратным резервированием по датчикам угла, контроллеру формирования команды, источникам питания.
Наиболее близким техническим решением является устройство ввода команд по патенту РФ №2679745 с датой публикации 12.02.2019, содержащее привод, в котором установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик. Устройство содержит тормозные колодки, расположенные внутри диска и упирающиеся в стационарные стенки корпуса самого устройства, по три канала датчика угла на каждой из 2-х координат перемещения рукоятки, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, держатель с магнитами закреплен на общей оси диска, при этом микросхемы закреплены на платах датчиков угла, объединенных в трехканальный блок датчиков угла, кроме того, все три канала датчиков угла объединены одной платой контроллера, в состав которой входят три канала контроллера со своими источниками питания, два коммутатора двух выходных линий и два адаптера.
Недостатками данного технического решения являются ограниченность функциональных возможностей, поскольку перемещение рукоятки предусмотрено только по одной координате, отсутствуют встроенные кнопки и переключатели для выдачи дополнительных команд, а также отсутствует защищенность устройства ввода команд от воздействия угольной пыли.
Технической задачей, на решение которой направлено заявляемое изобретение, является создание бесконтактного, резервированного устройства ввода команд, выполняющего функции формирования и выдачи команд при перемещении рукоятки в двух координатах в диапазоне 360°, самовозврата из любой точки положения рукоятки устройства ввода команд, а также повышенная защищенность устройства в условиях запыленности воздуха абразивными частицами угольной пыли для исключения ее влияния на истирание и износ механизмов устройства.
Повышенная защищенность устройства ввода команд от действия угольной пыли достигается за счет герметичной конструкции устройства, а также за счет применения материалов, износостойких к действию абразивных частиц.
Техническими результатами, которые достигаются при использовании изобретения, являются совмещение бесконтактного измерения угла поворота рукоятки с конструкцией, позволяющей производить перемещение одной рукоятки по двум координатам и во всех направлениях с измерением угла в каждом из этих перемещений. Трехканальное резервирование датчиков угла и контроллеров схемы измерения и возможность перемещения рукоятки в любое положение в пределах 360°, самовозврат рукоятки в нейтральное положение из любого положения в пределах рабочего диапазона, а также герметичность конструкции для работы в условиях высокой угольной запыленности.
Технические результаты достигаются за счет реализации устройства ввода команд, содержащего привод с механизмами самовозврата в двух плоскостях с пружинами кручения, механизм фиксации рукоятки в нейтральном положении подпружиненным шариком, контактирующим со сферической поверхностью, имеющей в центре углубление-ловитель шарика, по три канала датчика угла для каждого из двух направлений перемещения рукоятки, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, причем микросхемы закреплены на платах датчиков угла, объединенных в два трехканальных блока датчиков угла. Все шесть каналов датчиков угла объединены одной платой контроллера, в состав которой входят общие для всех шести датчиков угла три канала контроллера со своими источниками питания. Устройство содержит корпус, состоящий из четырех стенок с установленными подшипниками, в подшипниках двух противоположных стенок установлена ось, на одном конце которой закреплен магнит и кулиса с магнитом. При этом в центре оси вставлена шпилька, которая крепит вилку со стержнем, на котором крепится рукоятка, а другой конец оси служит для крепления хомута, в котором удерживается штырь для зацепления усов пружины кручения, посаженной на эту же ось, кроме того две другие стенки служат для крепления двух полуосей, на одной из которых посажена пружина кручения и хомут со штырем для зацепа усов пружины, другая полуось удерживает хомут, а также на ее конце закреплен магнит и кулиса с магнитом, при этом на торцах двух хомутов, находящихся на двух полуосях, закреплена направляющая, паз которой ограничивает угол наклона рукоятки влево-вправо.
Следует отметить, что сама направляющая выполнена с возможностью поворота на полуосях (через хомуты) вперед-назад.
Рукоятка выполнена разборной конструкцией и состоит из двух частей и вкладыша с кнопками и переключателем клавишным, что обеспечивает простоту и удобство сборки и разборки рукоятки с элементами коммутации при монтаже и замене для ремонта в процессе эксплуатации.
Устройство ввода команд снабжено защитным гофром, обеспечивающим защиту от абразивной угольной пыли.
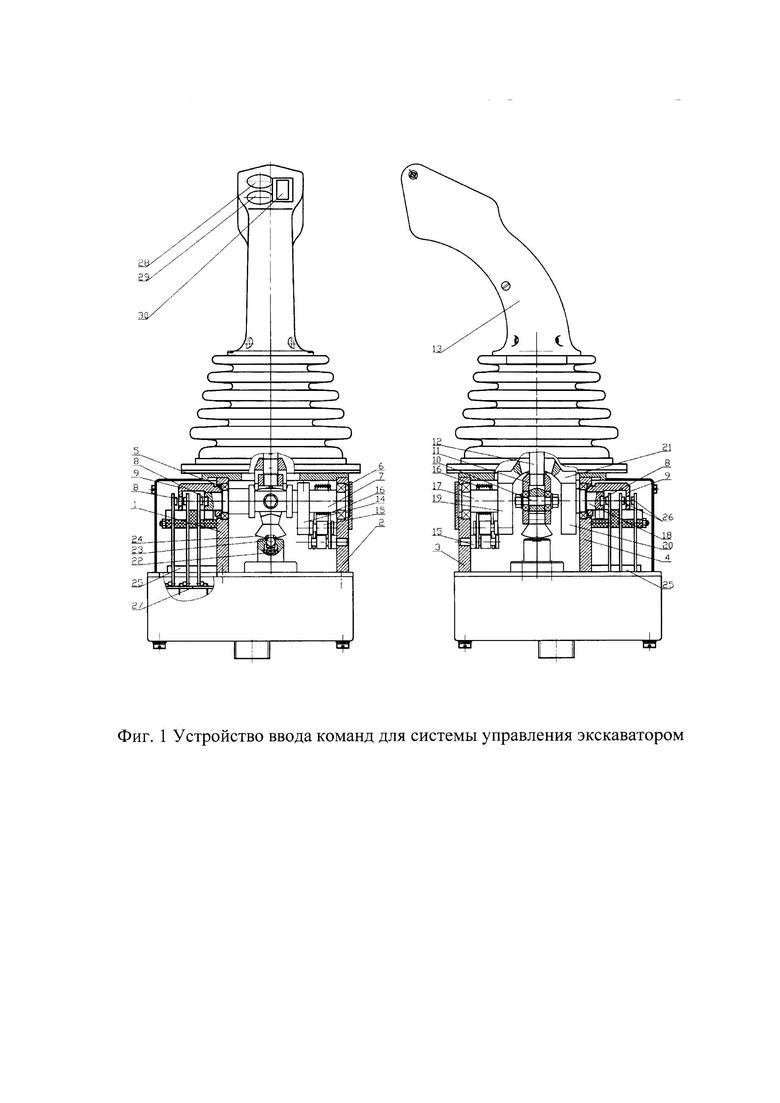
На фиг. 1 приведен общий вид устройства ввода команд для системы управления экскаватора.
Устройство ввода команд для системы управления экскаватором содержит корпус, состоящий из четырех стенок 1, 2, 3, 4 с установленными подшипниками 5, 6. В подшипниках 5, 6 двух противоположных стенок 1, 2 установлена ось 7, на одном конце которой закреплен магнит 8 и кулиса 9 с магнитом 8. В центре оси 7, вставлена шпилька 10, за которую закреплена вилка 11 со стержнем 12, на котором крепится рукоятка 13. Другой конец оси 7 служит для крепления хомута 14, в котором удерживается штырь 15 для зацепления усов пружины кручения 16, посаженной на эту же ось 7. Две другие стенки 3, 4 служат для крепления двух полуосей 17, 18, на полуоси 17 посажена пружина кручения 16 и хомут 19 со штырем 15 для зацепа усов пружины 16. Полуось 18 удерживает хомут 20, а также на ее конце закреплен магнит 8 и кулиса 9 с магнитом 8. На торцах хомутов 19, 20, находящихся на полуосях 17, 18, закреплена направляющая 21, паз которой ограничивает угол наклона рукоятки 13 влево-вправо. Сама направляющая 21 поворачивается на полуосях 17, 18 (через хомуты 19, 20) вперед-назад. Такая конструкция заявляемого устройства обеспечивает мягкое и плавное управление.
Кроме того, в корпусе установлены два блока датчиков угла 25 по три платы датчиков угла в блоке. Таким образом, формируются шесть каналов датчиков угла, где каждый канал состоит из платы с микросхемой 26 с датчиком Холла и магнитом 8, размещенных на оси 7, в кулисах 9 и полуоси 18, соединенных рукояткой 13. Каналы датчиков угла соединены с общей стационарной платой контроллера 27, причем блоки датчиков угла 25 расположены вертикально по отношению к плате контроллера 27. Стационарная плата контроллера 27 имеет трехканальное исполнение по контроллеру и встроенным источникам питания.
Конструкция привода обеспечивает возможность перемещения рукоятки 13 в любое положение в диапазоне 0°-360°, в этом положении производится съем информации шести микросхем 26 датчиков угла 25. По каждой координате угол измеряется отдельно. По результатам измерений формируются команды в формате передачи по линии RS485. Такая конструкция заявляемого устройства обеспечивает бесконтактное измерение угла поворота перемещения рукоятки по двум координатам и во всех направлениях с измерением угла в каждом из этих перемещений с трехканальным резервированием.
Рукоятка 13 имеет возможность перемещаться по двум координатам и одновременно во всех направлениях в пределах ограничивающего угла. Пружины кручения 16 выполняют функции самовозврата рукоятки 13 в положение «ноль». Для четкой фиксации рукоятки 13 в нулевом положении предусмотрен фиксатор с подпружиненным шариком 23, контактирующим со сферической поверхностью 24, имеющей в центре углубление-ловитель шарика 23. При отпускании рукоятки 13 производится ее самовозврат в нейтральное положение. Угол отклонения рукоятки 13 из нейтрального положения в любом направлении составляет 15°.
На рукоятке 13 установлены кнопки 28, 29 и переключатель клавишный 30.
Рукоятка 13 выполнена разборной конструкцией и состоит из двух частей и вкладыша с закрепленными кнопками 28, 29 и переключателем клавишным 30, связанными с платой контроллера 27, что обеспечивает простоту и удобство сборки и разборки устройства рукоятки при монтаже.
Выходной сигнал об угловом положении рукоятки 13 и состоянии кнопок 28, 29 и переключателя клавишного 30 передается последовательным кодом в систему управления верхнего уровня экскаватора по двум линиям связи RS485 с протоколом ModBusRTU. Передаются данные любого канала по запросу верхнего уровня.
Линия RS485 используется для передачи в контроллер системы управления верхнего уровня измеренных и отформатированных данных об измеренных углах положения рукоятки 13, состоянии кнопок 28, 29 и переключателя клавишного 30, диагностической информации по исправности устройства, а также, для тестирования оборудования устройства вода команд в составе ААП (аппаратуры автономных проверок) при проведении приемо-сдаточных испытаний, а также для тестирования устройства контроллером верхнего уровня системы управления экскаватора.
Устройство снабжено специализированным защитным гофром 31, обеспечивающим защиту от абразивной угольной пыли.
Снизу устройства расположен разъем для внешнего подключения.
Устройство имеет шпильку защитного заземления.
Заявляемое устройство ввода команд системы управления экскаватором работает следующим образом.
В эксплуатации одновременно используются два устройства выдачи команд для системы управления экскаватором, которые располагаются в кабине машиниста экскаватора на тумбе кресла-пульта слева и справа от оператора. Оба устройства ввода команд полностью идентичны друг другу, но функции органов управления каждой из устройств различны, что определяется программой системы управления верхнего уровня, и зависит от того, какое устройство опрашивает система управления и какое действие должен выполнять экскаватор по команде каждой из рукояток.
Электропитание устройства ввода команд осуществляется от бортовой сети с напряжением 24 В.
При отклонении рукоятки 13 вперед или назад поворачивается ось 7 с закрепленными на ней магнитом 8 и кулисой 9 с магнитом 8 относительно объединенных в блок датчиков угла 25, что позволяет снимать информацию с трех микросхем 26 с датчиками Холла. Также происходит взведение пружины кручения 16 за счет ее усов, зацепленных за штыри 15, установленные в хомуте 14. При отпускании рукоятки 13 происходит ее самовозврат в вертикальное положение за счет возвращения пружины 16 в исходное положение.
При отклонении рукоятки 13 влево или вправо происходит наклон направляющей 12, связанной с хомутами 19, 20, один из которых поворачивает полуось 18 с закрепленным на ней магнитом 8 и кулисой 9 с магнитом 8 относительно объединенных в блок датчиков угла 25, что позволяет снимать информацию с трех микросхем 26 с датчиками Холла. На полуоси 17 происходит взведение посаженной на нее пружины кручения 16 за счет ее усов, зацепленных за штыри 15, установленные в хомуте 19. При отпускании рукоятки 13 происходит ее самовозврат в вертикальное положение за счет возвращения пружины 16 в исходное положение.
В случае, когда заявляемое устройство ввода команд занимает левое положение, функционирование выполняется следующим образом.
При отклонении рукоятки вперед на угол 0-100% от максимального происходит подъем рукояти экскаватора со скоростью, пропорциональной углу отклонения рукоятки устройства ввода команд.
При отклонении рукоятки назад на угол 0-100% от максимального происходит опускание рукояти экскаватора со скоростью, пропорциональной углу отклонения рукоятки устройства ввода команд.
При отклонении рукоятки влево на угол 0-100% от максимального происходит поворот платформы экскаватора против часовой стрелки со скоростью, пропорциональной углу отклонения рукоятки устройства ввода команд.
При отклонении рукоятки вправо на угол 0-100% от максимального происходит поворот платформы экскаватора по часовой стрелке со скоростью, пропорциональной углу отклонения рукоятки устройства ввода команд.
При нажатии кнопки №1 происходит включение режима поддержания горизонтального положения ковша. При отпускании кнопки происходит выключение режима.
При нажатии кнопки №2 происходит включение внешнего звукового сигнала. При отпускании кнопки происходит выключение сигнала.
При перемещении клавиши в верхнее положение с фиксацией происходит отключение режима автоматического подключения тормоза поворотной платформы.
При перемещении клавиши в нижнее положение с фиксацией происходит включение режима автоматического подключения тормоза поворотной платформы.
В случае, когда заявляемое устройство ввода команд занимает правое положение, функционирование выполняется следующим образом.
При отклонении рукоятки вперед на угол 0-100% от максимального происходит опускание стрелы со скоростью, пропорциональной углу отклонения рукоятки устройства ввода команд.
При отклонении рукоятки назад на угол 0-100% от максимального происходит подъем стрелы со скоростью, пропорциональной углу отклонения рукоятки устройства ввода команд.
При отклонении рукоятки влево на угол 0-100% от максимального происходит подъем ковша со скоростью, пропорциональной углу отклонения рукоятки устройства ввода команд.
При отклонении рукоятки вправо на угол 0-100% от максимального происходит опускание ковша со скоростью, пропорциональной углу отклонения рукоятки устройства ввода команд.
При нажатии кнопки №1 (без фиксации) происходит включение режима плавающего положения стрелы. При отпускании кнопки происходит выключение режима.
При нажатии кнопки №2 (с фиксацией) происходит включение режима фиксации положения ковша относительно линии горизонта. При повторном нажатии происходит отключение режима фиксации положения ковша относительно линии горизонта.
Таким образом, заявляемое устройство ввода команд обеспечивает управление работой экскаватора во всех условиях применения экскаватора, в том числе в условиях повышенной запыленности воздуха абразивными частицами угольной пыли при обеспечении исключения влияние ее на истирание и износ механизмов устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ввода команд | 2018 |
|
RU2679751C1 |
| Устройство ввода команд для системы управления винторулевой колонкой судна | 2023 |
|
RU2800615C1 |
| Устройство ввода команд для системы управления подруливающим устройством | 2023 |
|
RU2802096C1 |
| Устройство ввода команд | 2018 |
|
RU2679745C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2012 |
|
RU2491459C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| СЕЛЕКТОР РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2013 |
|
RU2551786C1 |
| Устройство для хранения и выдачи предметов | 2015 |
|
RU2614198C1 |
| Джойстик одноосевой пропорциональный | 2021 |
|
RU2776590C1 |
Изобретение относится к органам управления работой экскаватора, где требуется надежность и достоверность формирования команд управления от оператора. Техническими результатами являются бесконтактное измерение угла поворота перемещения рукоятки во всех направлениях в пределах 360° с функцией самовозврата из любого положения в нейтральное положение, обеспеченное двухкоординатным механизмом перемещения рукоятки, с измерением угла по каждой из двух координат перемещения с трехканальным резервированием датчиков угла по каждой координате. Дополнительными техническими результатами являются исключение влияния абразивной пыли на истирание и износ механизмов за счет установки защитного гофра.
Устройство ввода команд для системы управления экскаватором содержит привод с механизмами самовозврата в двух плоскостях с пружинами кручения, механизм фиксации рукоятки в нейтральном положении, состоящий из подпружиненного шарика, контактирующего со сферической поверхностью, имеющей в центре углубление-ловитель шарика, по три канала датчика угла на каждой из 2-х координат перемещения рукоятки, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита. Микросхемы закреплены на платах датчиков угла, объединенных в два трехканальных блока датчиков угла. Все шесть каналов датчиков угла объединены одной платой контроллера, в состав которой входят общие для всех датчиков угла три канала контроллера со своими источниками питания. Устройство содержит корпус, состоящий из четырех стенок с установленными подшипниками, в подшипниках двух противоположных стенок установлена ось, на одном конце которой закреплены магнит и кулиса с магнитом. При этом в центре оси вставлена шпилька, за которую закреплена вилка со стержнем, на котором крепится рукоятка, а другой конец оси служит для крепления хомута, в котором удерживается штырь для зацепления усов пружины кручения, посаженной на эту же ось. Кроме того, две другие стенки служат для крепления двух полуосей, на одной из которых посажены пружина кручения и хомут со штырем для зацепа усов пружины, другая полуось удерживает хомут, а также на ее конце закреплены магнит и кулиса с магнитом. На торцах двух хомутов, находящихся на двух полуосях, закреплена направляющая, паз которой ограничивает угол наклона рукоятки. 3 з.п. ф-лы, 1 ил.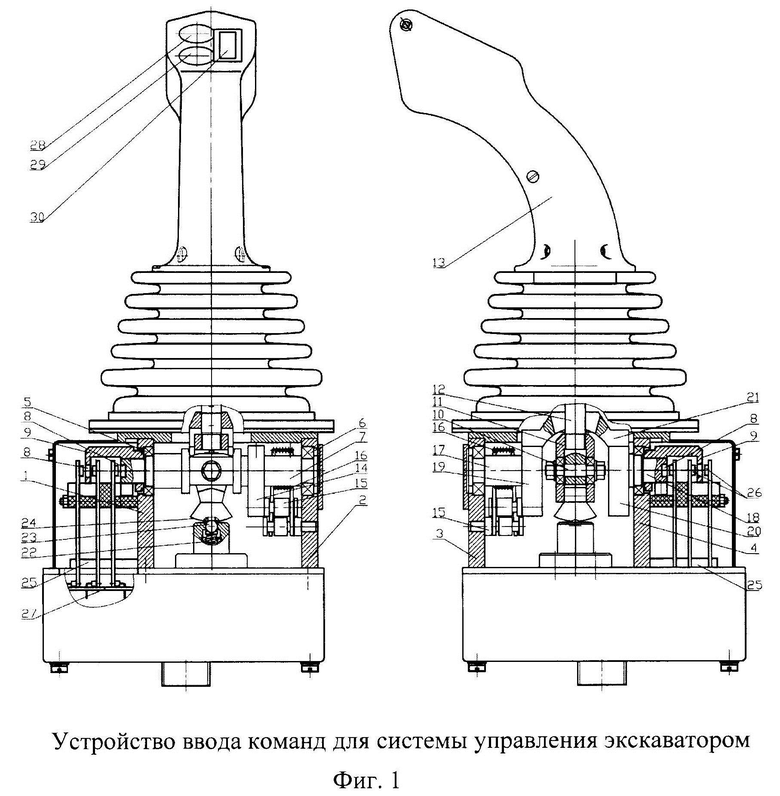
1. Устройство ввода команд для системы управления экскаватором, содержащее привод с механизмами самовозврата в двух плоскостях с пружинами кручения, механизм фиксации рукоятки в нейтральном положении, состоящий из подпружиненного шарика, контактирующего со сферической поверхностью, имеющей в центре углубление-ловитель шарика, по три канала датчика угла на каждой из 2-х координат перемещения рукоятки, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, причем микросхемы закреплены на платах датчиков угла, объединенных в два трехканальных блока датчиков угла, кроме того, все шесть каналов датчиков угла объединены одной платой контроллера, в состав которой входят общие для всех датчиков угла три канала контроллера со своими источниками питания, отличающееся тем, что содержит корпус, состоящий из четырех стенок с установленными подшипниками, в подшипниках двух противоположных стенок установлена ось, на одном конце которой закреплены магнит и кулиса с магнитом, при этом в центре оси вставлена шпилька, за которую закреплена вилка со стержнем, на котором крепится рукоятка, а другой конец оси служит для крепления хомута, в котором удерживается штырь для зацепления усов пружины кручения, посаженной на эту же ось, кроме того, две другие стенки служат для крепления двух полуосей, на одной из которых посажены пружина кручения и хомут со штырем для зацепа усов пружины, другая полуось удерживает хомут, а также на ее конце закреплены магнит и кулиса с магнитом, при этом на торцах двух хомутов, находящихся на двух полуосях, закреплена направляющая, паз которой ограничивает угол наклона рукоятки.
2. Устройство ввода команд по п. 1, отличающееся тем, что рукоятка оснащена кнопками и переключателем клавишным, связанными с платой управления.
3. Устройство ввода команд по п. 2, отличающееся тем, что рукоятка выполнена разборной конструкции, состоящей из двух частей и вкладыша для крепления кнопок и переключателя клавишного.
4. Устройство ввода команд по п. 1, отличающееся тем, что снабжено защитным гофром.
| СИСТЕМА УПРАВЛЕНИЯ РУКОЯТЬЮ ЭКСКАВАТОРА | 2015 |
|
RU2681800C2 |
| Устройство ввода команд | 2018 |
|
RU2679751C1 |
| 0 |
|
SU174021A1 | |
| CN 203543959 U, 16.04.2014 | |||
| DE 19648417 A1, 28.05.1998. | |||
