Изобретение относится к электротехнике и может быть использовано в качестве автономной энергетической установки постоянного напряжения.
Известна автономная система электропитания, выполненная по параллельно-последовательной схеме, которая содержит солнечную батарею (СБ), аккумуляторную батарею (АБ), последовательный регулятор напряжения (РН) СБ, зарядное устройство (ЗУ) и разрядное устройство (РУ) [1]. В такой системе при избытке солнечной энергии напряжение на нагрузке стабилизирует последовательный РН, а избыток энергии направляется зарядным устройством на хранение в аккумуляторную батарею. В случае, если мощности СБ недостаточно для питания нагрузки, то в работу включается разрядное устройство, которое восполняет недостаток мощности и стабилизирует напряжение на нагрузке при несколько меньшем значении выходного напряжения. При этом ЗУ закрывается, а РН полностью открывается.
Недостатками такой системы, во-первых, является то, что она не обеспечивает регулирование напряжения СБ в оптимальной рабочей точке ее вольт-амперной характеристики (ВАХ), положение которой существенно зависит от условий и времени эксплуатации (ресурса, температуры, освещенности), то есть не обеспечивается отбор максимума мощности от СБ при изменении параметров ее ВАХ и, во-вторых, то, что она не содержит контур автоматического регулирования положения панелей солнечной батареи относительно Солнца.
Известна также солнечная фотоэлектрическая установка, содержащая СБ с линзами Френеля и фотоэлектрическими преобразователями, размещенными на механической системе, поддерживающей перпендикулярное положение солнечной батареи по направлению на Солнце (оснащенную системой ориентации солнечной батареи на Солнце) [2]. Система ориентации батареи содержит основной и дополнительный датчики положения Солнца. Основной датчик состоит из затеняющего экрана с отверстием и восьми фотоэлементов каскадного типа, четыре из которых, размещенные справа, слева, сверху и снизу по наружным сторонам экрана, образуют каналы грубого азимутального и зенитного наведения, вырабатывающие электрические сигналы при изменении положения Солнца. Четыре других фотоэлемента расположены таким же образом по внутренним сторонам экрана и образуют каналы точного наведения. Дополнительный датчик состоит из трех фотоэлементов каскадного типа, подключенных к азимутальному каналу. Два фотоэлемента дополнительного датчика направлены влево и вправо по отношению к основному датчику, а третий - в противоположную сторону относительно основного датчика. Полярность подключения третьего фотоэлемента меняется при прохождении направления Юг-Север, при этом сигнал на включение электропривода ведущего колеса базовой рамы подается от фотоэлементов азимутального канала, а сигнал на включение электропривода подвешенной рамы - от фотоэлементов зенитного канала.
Недостатками такой установки являются относительно низкий срок службы солнечной фотоэлектрической установки, обусловленный использованием линз Френеля (что ведет к существенно более высоким температурным нагрузкам фотоэлектрических преобразователей и, как следствие этого, ведет к снижению надежности солнечной энергетической установки) и невозможность работы системы слежения за Солнцем при рассеянном солнечном излучении (система слежения за Солнцем работает только при наличии прямого солнечного излучения, хотя фотоэлектрические преобразователи могут вырабатывать электрическую энергию и при рассеянном солнечном излучении). Недостатками такой установки также являются громоздкость конструкции датчиков положения Солнца и сложность осуществления режима отбора мощности в оптимальной рабочей точке ВАХ СБ при изменении условий эксплуатации.
Наиболее близкой к заявляемой автономной фотоэлектрической системе электропитания по технической сущности является система электропитания, содержащая замкнутую цепь из последовательно соединенных солнечной батареи, регулятора напряжения, имеющего два входа, первый, силовой, из которых соединен с положительным выводом солнечной батареи, нагрузки, положительный вывод которой соединен с выходом регулятора напряжения и резистора, выполняющего роль датчика тока, зарядное устройство, имеющее два входа, первый из которых соединен с положительным выводом солнечной батареи, и два выхода, первый из которых соединен с управляющим входом регулятора напряжения, разрядное устройство, вход которого соединен со вторым выходом зарядного устройства, а выход - с выходом регулятора напряжения, аккумуляторную батарею, выходная положительная клемма которой соединена со вторым выходом зарядного устройства и входом разрядного устройства, а выходная отрицательная клемма - с отрицательным выводом нагрузки, экстремальный регулятор мощности, состоящий из датчика мощности, имеющего три входа, первый и второй из которых подключены параллельно резистору, а третий соединен с положительным выводом солнечной батареи, и один выход синхронизирующего генератора, имеющего три выхода, устройства выборки и хранения информации, имеющего два входа, первый из которых соединен с выходом датчика мощности, а второй - с первым выходом синхронизирующего генератора, и один выход устройства сравнения, имеющего три входа, первый из которых соединен с выходом датчика мощности, второй - с выходом устройства выборки и хранения информации, а третий - со вторым выходом синхронизирующего генератора, и один выход корректирующего устройства, содержащего два входа, первый из которых соединен с выходом устройства сравнения, а второй - с третьим выходом синхронизирующего генератора, и один выход, соединенный со вторым управляющим входом зарядного устройства [3].
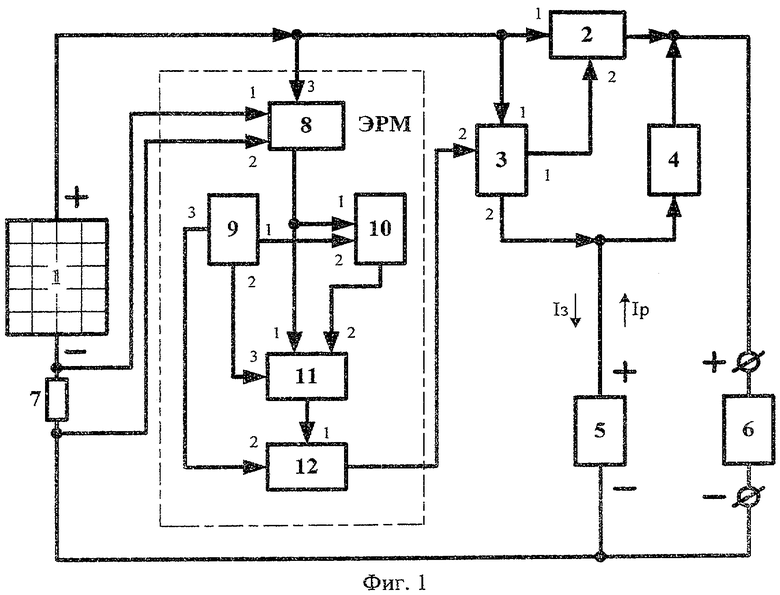
Функциональная схема системы-прототипа приведена на фиг.1.
На фиг.1 обозначено: 1 - солнечная батарея (СБ); 2 - регулятор напряжения (РН); 3 - зарядное устройство (ЗУ); 4 - разрядное устройство (РУ); 5 - аккумуляторная батарея (АБ); 6 - нагрузка; 7 - резистор, выполняющий роль датчика тока СБ; 8 - датчик мощности (ДМ), 9 - синхронизирующий генератор (СГ); 10 - устройство выборки и хранения информации (УВХИ); 11 - устройство сравнения (УС); 12 - корректирующее устройство (КУ). Устройства 8-12 образуют экстремальный регулятор мощности (ЭРМ) СБ шагового типа.
Достоинством системы-прототипа является то, что она реализует режим отбора мощности в оптимальной рабочей точке ВАХ СБ при изменении условий ее эксплуатации. Недостатками системы-прототипа являются невозможность получения максимально возможной мощности от используемой СБ (в системе-прототипе не регулируется положение СБ в пространстве) и ограниченная область применения, обусловленная возможностью использования ее только в энергетических установках со стационарным расположением СБ (например, на крышах домов).
Задачи, на решение которых направлено предлагаемое изобретение, получение максимально возможной мощности (максимально возможной энергетической эффективности) от используемой солнечной батареи и расширение области применения автономной фотоэлектрической системы электропитания.
Решение поставленных задач достигается тем, что в автономную фотоэлектрическую систему электропитания, содержащую замкнутую цепь из последовательно соединенных солнечной батареи, регулятора напряжения, имеющего два входа, первый, силовой, из которых соединен с положительным выводом солнечной батареи, нагрузки, положительный вывод которой соединен с выходом регулятора напряжения и резистора, выполняющего роль датчика тока, зарядное устройство, имеющее два входа, первый из которых соединен с положительным выводом солнечной батареи, и два выхода, первый из которых соединен с управляющим входом регулятора напряжения, разрядное устройство, вход которого соединен со вторым выходом зарядного устройства, а выход - с выходом регулятора напряжения, аккумуляторную батарею, выходная положительная клемма которой соединена со вторым выходом зарядного устройства и входом разрядного устройства, а выходная отрицательная клемма - с отрицательным выводом нагрузки, экстремальный регулятор мощности, состоящий из датчика мощности, имеющего три входа, первый и второй из которых подключены параллельно резистору, а третий соединен с положительным выводом солнечной батареи, и один выход синхронизирующего генератора, имеющего три выхода, устройства выборки и хранения информации, имеющего два входа, первый из которых соединен с выходом датчика мощности, а второй - с первым выходом синхронизирующего генератора, и один выход устройства сравнения, имеющего три входа, первый из которых соединен с выходом датчика мощности, второй - с выходом устройства выборки и хранения информации, а третий - со вторым выходом синхронизирующего генератора, и один выход корректирующего устройства, содержащего два входа, первый из которых соединен с выходом устройства сравнения, и один выход, соединенный со вторым управляющим входом зарядного устройства, дополнительно введены устройство контроля степени заряженности аккумуляторной батареи, имеющее N входов, соединенных с N измерительными выходами аккумуляторной батареи, и два выхода, первый из которых соединен с третьим дополнительно введенным входом зарядного устройства, а второй - со вторым дополнительно введенным входом разрядного устройства, в состав экстремального регулятора мощности дополнительно введены три электронных ключа, каждый из которых имеет два входа и один выход, при этом управляющие входы электронных ключей соединены с третьим выходом синхронизирующего генератора, а выход первого из электронных ключей соединен с вторым входом корректирующего устройства, в состав системы электропитания также введены блок управления системой электропитания, имеющий три входа, первый из которых соединен с третьим выходом синхронизирующего генератора, второй - с выходом датчика мощности, а третий - с выходом устройства сравнения, и шесть выходов, первый, второй и третий из которых соединены соответственно с вторыми, управляющими, входами первого, второго и третьего электронных ключей, а четвертый - с дополнительно введенным третьим входом корректирующего устройства, шаговые двигатели поворота солнечной батареи в горизонтальной и вертикальной плоскостях, оси которых расположены в двух ортогональных плоскостях и механически соединены с солнечной батареей, блок питания и управления шагового двигателя поворота солнечной батареи в горизонтальной плоскости, имеющий три входа, первый из которых соединен с выходом устройства сравнения, второй - с выходом второго электронного ключа, а третий - с пятым выходом блока управления системой электропитания, и один выход, соединенный с электрическим входом шагового двигателя поворота солнечной батареи в горизонтальной плоскости, и блок питания и управления шагового двигателя поворота солнечной батареи в вертикальной плоскости, имеющий три входа, первый из которых соединен с выходом устройства сравнения, второй - с выходом третьего электронного ключа, а третий - с шестым выходом блока управления системой электропитания, и один выход, соединенный с электрическим входом шагового двигателя поворота солнечной батареи в вертикальной плоскости.
Функциональная схема предлагаемой системы электропитания приведена на фиг.2, на которой обозначено: 1 - солнечная батарея (СБ); 2 - регулятор напряжения (РН); 3 - зарядное устройство (ЗУ); 4 - разрядное устройство (РУ); 5 - аккумуляторная батарея (АБ); 6 - нагрузка; 7 - резистор, выполняющий роль датчика тока СБ; 8 - датчик мощности (ДМ); 9 - синхронизирующий генератор (СГ); 10 - устройство выборки и хранения информации (УВХР1); 11 - устройство сравнения (УС); 12 - корректирующее устройство (КУ); 13 - устройство контроля степени заряженности АБ (УКЗБ); 14, 15 и 16 - электронные ключи (ЭК); 17 - блок управления системой электропитания (БУ); 18 и 19 - шаговые электродвигатели (ШЭД) соответственно приводов горизонтального и вертикального поворота СБ; 20 и 21 - блоки питания и управления (БПУ) соответственно приводов горизонтального и вертикального поворотов (ПГП и ПВП) СБ. Устройства 8-16 образуют экстремальный регулятор мощности (ЭРМ) СБ шагового типа. Устройства, блоки и элементы, обозначенные на фиг.2 цифрами с 1 по 12, идентичны устройствам, блокам и элементам функциональной схемы, приведенной на фиг.1.
СБ располагается на механической системе, обеспечивающей возможность поддерживать ее устойчивое положение в пространстве, в том числе и перпендикулярное положение СБ по направлению на Солнце.
Предлагаемая система электропитания работает следующим образом.
Последовательность работы ПГП и ПВП, а также канала регулирования максимума мощности по ВАХ СБ 1 определяет и задает БУ системой электропитания 17, который в любой момент времени разрешает открытое состояние только одному из ЭК 14, 15 или 16 (через управляющие выходы БУ 1, 2 и 3). Управляющий сигнал на изменение положения или режима работы системы электропитания от СГ 9 проходит только на одно исполнительное устройство (КУ 12, БПУ 20 приводом горизонтального поворота СБ 1 или БПУ 21 приводом вертикального поворота СБ 1).
В случае если открыт ЭК 14 и закрыты ЭК 15 и 16, то ПГП и ПВП не работают и СБ 1 остается неподвижной. Система электропитания в этом случае находится в режиме регулирования максимума мощности по ВАХ СБ 1. Она реализует экстремальное регулирование мощности СБ 1 в одном из двух режимов - ЗУ 3 или РУ 4 (в зависимости от соотношения мощности, которую может отдать СБ 1, и требуемой мощности для питания нагрузки 6) [3].
В первом режиме входящий в состав ЭРМ ДМ 8, обрабатывая информацию о напряжении и токе СБ 1 в рабочей точке ВАХ, формирует на своем выходе напряжение, пропорциональное текущему значению мощности, вырабатываемой СБ 1. По сигналу от СГ 9 (с выхода 1) это значение мощности запоминается в УВХИ 10, после чего по следующему сигналу СГ 9, поступающему с выхода 3 на управляющий вход 1 ЭК 14 и далее на вход 2 КУ, рабочая точка на ВАХ СБ 1 смещается вследствие воздействия на усилитель ошибки широтно-импульсного модулятора (ШИМ) ЗУ 3, осуществляемого КУ 12 (сигнал поступает с выхода КУ 12 на вход 2 ЗУ 3). Затем по сигналу с выхода 2 СГ 9 УС 11 сравнивает вновь измеренное текущее значение мощности СБ 1 с предыдущим значением. Выходной сигнал УС 11 воздействует на КУ 12, определяя направление последующего смещения рабочей точки на ВАХ СБ 1. При уменьшении мощности, генерируемой СБ 1, КУ 12 изменяет направление поиска экстремума на противоположное. Одновременно в УВХИ 10 по сигналу с выхода 1 СГ 9 запоминается новое текущее значение мощности СБ 1. В дальнейшем процесс повторяется. Таким образом осуществляется работа системы электропитания в режиме максимальной мощности СБ 1 (при этом осуществляются непрерывные поисковые колебания напряжения СБ вокруг оптимальной рабочей точки ВАХ. В режиме заряда АБ 5 смещение рабочей точки на ВАХ СБ происходит из-за изменения длительности открытого состояния силовых ключей ЗУ 3.
Во втором режиме, когда СБ не может обеспечить требуемую мощность в нагрузке 6, ЗУ 3 закрывается и в работу включается РУ 4, которое стабилизирует напряжение на нагрузке 6. Напряжение на СБ 1 несколько понижается. Регулирование напряжения СБ 1 начинает обеспечивать РН 2 (в заданном ЭРМ поддиапазоне). В этом режиме рабочая точка на ВАХ СБ 1 смещается вследствие воздействия на усилитель ошибки ШИМ РН 2, осуществляемого КУ 12 через ШИМ ЗУ 3 [3]. Во втором режиме система электропитания работает аналогично описанной выше работе в первом режиме регулирования максимума мощности СБ 1 ЗУ 3. Также осуществляются непрерывные поисковые колебания напряжения СБ 1 вокруг оптимальной точки ВАХ. Весь ток, генерируемый СБ 1, РН 2 направляется в нагрузку 6.
Таким образом, система электропитания проявляет себя как адаптивная система с изменяющейся внутренней структурой в зависимости от текущего состояния источников электроэнергии и нагрузки 6. РН 2 попеременно переходит из режима регулирования выходного напряжения (напряжения нагрузки 6 при РСБ>Рн) в режим регулирования входного напряжения (напряжения СБ при РН>РСБ) и обратно.
С заданной периодичностью блок БУ 17 закрывает ЭК 14 (сигнал с выхода 1 БУ 17 на второй вход ЭК 14) и открывает ЭК 15 (сигнал с выхода 2 БУ 17 поступает на второй вход ЭК 15). КУ 12 прекращает изменять положение рабочей точки на ВАХ СБ, так как на его второй управляющий вход перестает поступать сигнал с выхода 3 СГ 9 (ЭК 14 закрыт). Напряжение СБ 1 стабилизируется на заданном уровне. Управляющий сигнал начинает поступать с выхода 3 СГ 9 через ЭК 15 на вход 12 БПУ 20, который, управляя ШЭД 18, изменяет ориентацию панелей СБ относительно Солнца по горизонту. Входящий в состав ЭРМ датчик ДМ 8, обрабатывая информацию о напряжении и токе СБ 1, формирует на своем выходе напряжение, пропорциональное текущему значению мощности, вырабатываемой СБ. По сигналу от СГ 9 (поступающего с его выхода 1) это значение мощности запоминается в УВХИ 10, после чего по следующему сигналу СГ 9 (с выхода 3 через ключ 15 на БПУ 20) ШЭД 18 вновь изменяет ориентацию панелей СБ относительно Солнца. Затем вновь измеренное значение мощности СБ 1 сравнивается с предыдущим значением с помощью УС 11. Выходной сигнал УС 11 воздействует на БПУ 20, задавая направление последующего поворота ШЭД 18.
При уменьшении мощности, генерируемой СБ 1, БПУ 20 по сигналу с выхода УС 11 изменяет направление вращения ШЭД 18 на противоположное. Одновременно в УВХИ 10 запоминается новое текущее значение мощности СБ 1. В дальнейшем процесс повторяется. Таким образом обеспечивается поиск Солнца по горизонту, при этом осуществляются непрерывные поисковые повороты панелей СБ вокруг "горизонтальной оптимальной точки". БУ 17, получив через вход 3 неоднократные сигналы о реверсе системы от УС 11, останавливает ПГП, закрывает ЭК 15 и открывает ЭК 16, разрешая поиск Солнца по вертикали. Далее работа системы осуществляется аналогично работе поиска Солнца по горизонтали. Совершив несколько поисковых колебаний панелей СБ вокруг "вертикальной оптимальной точки" БУ 17 закрывает ЭК 16 и открывает ЭК 14, разрешая поиск экстремума мощности по ВАХ СБ.
В дальнейшем, по истечении заданного времени, БУ 17 снова останавливает работу канала регулирования экстремума мощности по ВАХ СБ и разрешает работу канала поиска Солнца по горизонтали. Цикл работы системы автоматического регулирования повторяется.
УКЗБ 13 введено с целью защиты от аварийных ситуаций АБ 5 и достижения длительных сроков функционирования системы электропитания. Оно осуществляет контроль степени заряженности АБ 5 по заданным параметрам для конкретного типа используемой АБ (например, по емкости, напряжению, давлению и температуре внутри АБ 5). При достижении предельного заряда или возникновении аварийной ситуации (когда наступает предельно допустимый разбаланс отдельных аккумуляторов по напряжению, емкости, температуре или давлению внутри АБ 5) УКЗБ 13 формирует на своем первом выходе сигнал, который поступает на третий вход ЗУ 3 и отключает его. При достижении предельного разряда или возникновении аварийной ситуации УКЗБ 13 формирует на своем втором выходе сигнал, который поступает на второй вход РУ 4 и отключает его. Одновременно с формированием выходных сигналов на первом или втором выходах УКЗБ 13 формирует звуковой или световой сигнал аварийной ситуации.
В случае отсутствия сигнала на выходе ДМ 8, например в ночное время, БУ 17 устанавливает систему электропитания в заданный режим работы и запрограммированное положение панелей СБ 1 путем воздействия на КУ 12 и БПУ ПГП и ПВП 20 и 21 (с выходов 4, 5 и 6 БУ 17).
Предложенная автономная фотоэлектрическая система электропитания обеспечивает максимально возможную энергетическую эффективностью - получение максимально возможного количества электроэнергии с конкретной площади СБ. Расширение области применения достигается единой системой автоматического регулирования, обеспечивающей как регулирование напряжения СБ в оптимальной рабочей точке ВАХ, так и непрерывной ориентацией СБ на Солнце. Автоматическое регулирование осуществляется по одному измеряемому параметру - мощности, генерируемой СБ. При этом разработка и изготовление датчиков положения панелей и дополнительной системы ориентации панелей СБ на Солнце не требуется.
Источники информации
1. Системы электропитания космических аппаратов. / Б.П.Соустин, В.И.Иванчура, А.И.Чернышев, Ш.Н.Исляев. - Новосибирск: Наука, 1994. - 318 с. [С.11, рис.1.3].
2. Пат. РФ №2286517, F24J 2/24. Солнечная фотоэлектрическая установка. /Ж.И.Алферов, В.М.Андреев, В.Н.Зазимко, В.Р.Ларионов, В.Д.Румянцев, А.Е.Чалов. Опубл. 27.10.2006. Бюл. №30.
3. Шиняков Ю.А. Экстремальное регулирование мощности солнечных батарей автоматических космических аппаратов. / Ю.А.Шиняков // Вестник Самарского государственного аэрокосмического университета им. академика С.П.Королева. - 2007. - Вып.1 (12). - С.123-128 [с.124, рис.1] - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С РЕГУЛИРОВАНИЕМ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ ИНВЕРТОРНО-ТРАНСФОРМАТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2014 |
|
RU2574565C1 |
| ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2634513C2 |
| ВЫСОКОВОЛЬТНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С ИНДУКТИВНО-ЕМКОСТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2016 |
|
RU2634612C2 |
| Система электропитания космического аппарата | 2018 |
|
RU2680245C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С ЭКСТРЕМАЛЬНЫМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2014 |
|
RU2560720C1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С ЭКСТРЕМАЛЬНЫМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2018 |
|
RU2704656C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322372C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322373C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2322374C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2593599C1 |
Изобретение относится к электротехнике и может быть использовано при проектировании и создании автономных энергетических установок, предназначенных для питания потребителей от фотоэлектрических солнечных батарей, эксплуатируемых длительное время при существенно изменяющихся условиях эксплуатации. Технический результат заключается в получении максимально возможной мощности (энергетической эффективности) и расширении области применения автономной фотоэлектрической системы электропитания. Для этого в известную фотоэлектрическую систему электропитания, содержащую замкнутую цепь из последовательно соединенных солнечной батареи, регулятора напряжения, нагрузки и резистора, а также зарядное и разрядное устройства, аккумуляторную батарею, датчик мощности, синхронизирующий генератор, устройство выборки и хранения информации, устройство сравнения и корректирующее устройство, дополнительно введены устройство контроля степени заряженности аккумуляторной батареи, блок управления системой электропитания, шаговые электродвигатели приводов горизонтального и вертикального поворотов солнечной батареи и блоки питания и управления приводов горизонтального и вертикального поворотов солнечной батареи. 2 ил.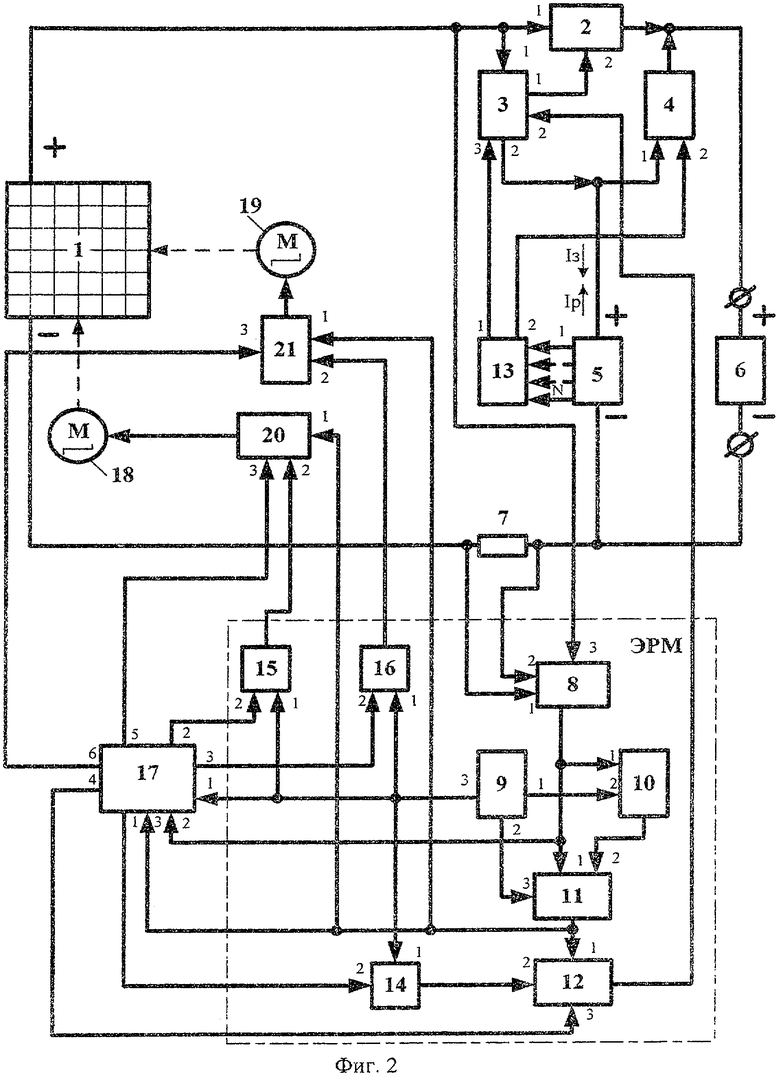
Автономная фотоэлектрическая система электропитания, содержащая замкнутую цепь из последовательно соединенных солнечной батареи, регулятора напряжения, имеющего два входа, первый, силовой, из которых соединен с положительным выводом солнечной батареи, нагрузки, положительный вывод которой соединен с выходом регулятора напряжения, и резистора, выполняющего роль датчика тока, зарядное устройство, имеющее два входа, первый из которых соединен с положительным выводом солнечной батареи, и два выхода, первый из которых соединен с управляющим входом регулятора напряжения, разрядное устройство, вход которого соединен со вторым выходом зарядного устройства, а выход - с выходом регулятора напряжения, аккумуляторную батарею, выходная положительная клемма которой соединена со вторым выходом зарядного устройства и входом разрядного устройства, а выходная отрицательная клемма - с отрицательным выводом нагрузки, экстремальный регулятор мощности, состоящий из датчика мощности, имеющего три входа, первый и второй из которых подключены параллельно резистору, а третий соединен с положительным выводом солнечной батареи, и один выход, синхронизирующего генератора, имеющего три выхода, устройства выборки и хранения информации, имеющего два входа, первый из которых соединен с выходом датчика мощности, а второй - с первым выходом синхронизирующего генератора, и один выход, устройства сравнения, имеющего три входа, первый из которых соединен с выходом датчика мощности, второй - с выходом устройства выборки и хранения информации, а третий - со вторым выходом синхронизирующего генератора, и один выход, корректирующего устройства, содержащего два входа, первый из которых соединен с выходом устройства сравнения, и один выход, соединенный со вторым управляющим входом зарядного устройства, отличающаяся тем, что в нее дополнительно введены устройство контроля степени заряженности аккумуляторной батареи, имеющее N входов, соединенных с N измерительными выходами аккумуляторной батареи, и два выхода, первый из которых соединен с третьим, дополнительно введенным, входом зарядного устройства, а второй - со вторым, дополнительно введенным, входом разрядного устройства, в состав экстремального регулятора мощности дополнительно введены три электронных ключа, каждый из которых имеет два входа и один выход, при этом управляющие входы электронных ключей соединены с третьим выходом синхронизирующего генератора, а выход первого из электронных ключей соединен с вторым входом корректирующего устройства, в состав системы электропитания также введены блок управления системой электропитания, имеющий три входа, первый из которых соединен с третьим выходом синхронизирующего генератора, второй - с выходом датчика мощности, а третий - с выходом устройства сравнения, и шесть выходов, первый, второй и третий из которых соединены соответственно с вторыми, управляющими, входами первого, второго и третьего электронных ключей, а четвертый - с дополнительно введенным третьим входом корректирующего устройства, шаговые двигатели поворота солнечной батареи в горизонтальной и вертикальной плоскостях, оси которых расположены в двух ортогональных плоскостях и механически соединены с солнечной батареей, блок питания и управления шагового двигателя поворота солнечной батареи в горизонтальной плоскости, имеющий три входа, первый из которых соединен с выходом устройства сравнения, второй - с выходом второго электронного ключа, а третий - с пятым выходом блока управления системой электропитания, и один выход, соединенный с электрическим входом шагового двигателя поворота солнечной батареи в горизонтальной плоскости, и блок питания и управления шагового двигателя поворота солнечной батареи в вертикальной плоскости, имеющий три входа, первый из которых соединен с выходом устройства сравнения, второй - с выходом третьего электронного ключа, а третий - с шестым выходом блока управления системой электропитания, и один выход, соединенный с электрическим входом шагового двигателя поворота солнечной батареи в вертикальной плоскости.
| ШИНЯКОВ Ю.А | |||
| Экстремальное регулирование мощности солнечных батарей автоматических космических аппаратов // Вестник Самарского государственного аэрокосмического университета | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| ТРАНЗИСТОРНЫЙ КОНВЕРТОР | 1998 |
|
RU2147157C1 |
| СОЛНЕЧНАЯ ФОТОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2005 |
|
RU2286517C1 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 2001 |
|
RU2229191C2 |
| Автономная система электропитания | 1989 |
|
SU1644296A1 |

