Изобретение относится к области космической техники, а именно к системам электроснабжения (СЭС) космических аппаратов (КА), и может быть использовано при управлении положением панелей их солнечных батарей (СБ).
Известен способ управления положением панелей СБ, принятый за аналог (см. [1], стр.190-194). Сущность способа заключается в следующем. Панели СБ ориентируются таким образом, что угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце составляет минимальную величину, что обеспечивает максимальный приход электроэнергии от СБ.
Для обеспечения высокой эффективности работы СБ на большинстве КА устанавливают систему их автоматической ориентации на Солнце. В состав такой системы входят солнечные датчики, логически преобразующие устройства и электрические приводы, управляющие положением СБ.
Недостаток указанного способа и системы управления положением СБ КА заключается в том, что в их действиях не предусмотрена защита от негативного воздействия факторов внешней среды (ФВС) на рабочие поверхности панелей СБ, как, например, защита от газов, выходящих из работающих реактивных двигателей (РД) КА (см. [2], стр.311-312; [3], стр.2-27), и потоков протонов и электронов высоких энергий космических лучей солнечного электромагнитного излучения (ЭМИ) в периоды высокой активности Солнца (см. [2], стр.323; [7], стр.31, 33).
Наиболее близким из аналогов, принятым за прототип, является способ управления положением СБ КА, описанный в [12]. Суть способа заключается в нижеследующем.
Осуществляют разворот панелей СБ в рабочее положение, обеспечивающее снабжение КА электроэнергией, соответствующее совмещению нормали к ее освещенной рабочей поверхности с плоскостью, образуемой осью вращения панелей СБ и направлением на Солнце. Далее определяют момент времени начала негативного воздействия ФВС на рабочую поверхность СБ и осуществляют разворот панелей СБ до момента времени начала воздействия указанных факторов и возвращение панелей СБ в рабочее положение после окончания указанного воздействия. Для этого измеряют плотность текущего потока солнечного электромагнитного излучения и по измеренным значениям определяют момент времени начала солнечной активности, определяют момент времени достижения частицами высоких энергий поверхности КА. В указанный момент времени измеряют плотность потоков частиц высоких энергий - протонов и электронов - и производят сравнение измеренных значений с пороговыми значениями. В случае превышения измеренными значениями пороговых значений потоков протонов и электронов производят разворот панелей СБ на угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце αs_min, соответствующий минимальной площади воздействия потоков частиц высоких энергий на поверхности СБ, определяемый соотношением:
αs min=arccos(Iн/Im),
где Iн - ток нагрузки от потребителей КА;
Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей СБ перпендикулярно солнечным лучам,
при этом за момент времени начала разворота панелей СБ принимают момент времени превышения измеренными значениями верхнего порогового значения плотности потоков указанных частиц высоких энергий, а за момент времени начала возвращения панелей СБ в рабочее положение принимают момент времени, при котором плотность потоков частиц высоких энергий становится ниже верхнего порогового значения.
СБ в системе СЭС МКС являются основными источниками электроэнергии и обеспечивают работу ее бортовых потребителей, включая подзаряд аккумуляторных батарей (АБ), являющихся вторичными источниками электроэнергии на борту МКС (см. [4]). Поворотом СБ уменьшается площадь поражения рабочих поверхностей СБ потоком ФВС. Полностью развернуть панели СБ вдоль поражающего потока ФВС не предоставляется возможным, т.к. необходимо обеспечивать КА и его аккумуляторные батареи вырабатываемой СБ электроэнергией, - исходя из этого площадь поражения панелей СБ потоком частиц высоких энергий уменьшается до минимальной путем разворота СБ на угол αs min, необходимый и достаточный для обеспечения бортовых потребителей энергией.
Исходя из необходимой достаточности, для работы бортовых систем КА нагрузка от потребителей Iн не должна превышать текущий ток I. Поскольку текущий ток I от СБ определятся выражением (см. [9], стр.109)

где Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам;
α - текущий угол между нормалью к рабочей поверхности СБ и направлением на Солнце,
то текущий угол α не должен превышать величину αs min, рассчитываемую по формуле:

Система управления положением СБ для реализации данного способа, принятого за прототип, описана в [12] и содержит СБ, на жесткой подложке корпуса которой расположены четыре фотоэлектрических батареи (БФ1, БФ2, БФ3, БФ4), устройство поворота СБ (УПСБ); усилительно-преобразующее устройство (УПУ); блок управления ориентацией СБ по направлению на Солнце (БУОСБС); блок разворота СБ в заданное положение (БРСБЗП); два регулятора тока (PT1, РТ2), блок АБ (БАБ); зарядное устройство для АБ (ЗРУ АБ); блок формирования команд на заряд АБ (БФКЗ АБ); датчик тока нагрузки (ДТН); блок управления системой энергоснабжения (БУСЭС); шина электроснабжения (ШЭ); блок измерения плотности текущего потока солнечного ЭМИ (БИПЭМИ); блок определения солнечной активности (БОСА); блок определения момента времени воздействия частиц на КА (БОМВВЧ); блок измерения плотности потоков частиц высоких энергий (БИППЧВЭ); блок определения момента времени начала управления СБ по токам нагрузки (БОМВУСБТНЗ); блок управления СБ по токам нагрузки (БУСБТНЗ). При этом СБ через свой первый выход, объединяющий выходы БФ1 и БФ4, соединена с первым входом УПСБ, и через второй выход, объединяющий выходы БФ2 и БФ3, соединена со вторым входом УПСБ. Выходы БУОСБС и БРСБЗП соединены соответственно с первым и вторым входами УПУ, выход которого, в свою очередь, соединен с третьим входом УПСБ. Первый и второй выходы УПСБ соединены соответственно с входами PT1 и РТ2, а выходы PT1 и РТ2 соединены с ШЭ. БАБ своим входом через ЗРУ АБ соединен с ШЭ. При этом ЗРУ АБ подключено своим первым входом к указанной шине, а ко второму входу ЗРУ АБ подключен выход ДТП, вход которого подключен, в свою очередь, к ШЭ. БАБ своим выходом подключен к первому входу БФКЗ АБ, а ко второму входу указанного блока подключен первый выход БУСЭС. Выход БФКЗ АБ подключен к третьему входу ЗРУ АБ. Вторые и третьи выходы БУСЭС подключены соответственно к первым входам БУОСБС и БРСБЗП. Третий выход УПСБ соединен со вторыми входами БУОСБС и БРСБЗП. Выход БИПЭМИ соединен с входом БОСА, первый выход которого, в свою очередь, соединен с входом БОМВВЧ. Выходы БОМВВЧ и БИППЧВЭ соединены с соответственно первым и вторым входами блока БОМВУСБТНЗ, а вход БИППЧВЭ соединен со вторым выходом БОСА. Выход БОМВУСБТНЗ соединен с входом БУСЭС. БУСЭС своим четвертым выходом соединен с первым входом БУСБТНЗ, а ко второму входу БУСБТНЗ подключен второй выход ДТН. Выход БУСБТНЗ подключен к третьему входу УПУ. Кроме этого, третий выход УПСБ соединен с третьим входом БУСБТНЗ.
В режиме электроснабжения КА система работает следующим образом.
УПСБ служит для транзитной передачи электроэнергии от СБ до PT1 и РТ2. Стабилизация напряжения на шине электропитания СЭС осуществляется одним из РТ. В то же время другой РТ находится в состоянии с замкнутыми силовыми транзисторами. Генераторы СБ работают в этом случае в режиме короткого замыкания. Когда мощность нагрузки становится больше мощности подключения генераторов СБ, в режим стабилизации напряжения переходит другой РТ, и энергия незадействовавшихся генераторов поступает на шину питания СЭС. В отдельные периоды, когда мощность нагрузки может превышать мощность СБ, ЗРУ АБ, за счет разряда блока АБ, компенсирует дефицит электроэнергии на борту КА. Для указанных целей в ЗРУ АБ служит регулятор разряда АБ.
Кроме указанного регулятора ЗРУ АБ содержит и регулятор заряда АБ. Регулятор заряда осуществляет ограничение зарядного тока БАБ на уровне (Iнз±1)А, где Iнз - номинальный ток заряда, при избытке мощности БФ и стабилизацию напряжения на шине СЭС за счет регулирования зарядного тока БАБ при мощности БФ, недостаточной для обеспечения питания АБ током заряда (Iнз±1)А. Для проведения указанных зарядно-разрядных циклов в ЗРУ АБ используется информация от ДТН. При этом ДТН подключен в СЭС таким образом, что измеряет ток нагрузки не только от бортовых потребителей, но и учитывает ток заряда АБ. Заряд БАБ осуществляет ЗРУ АБ через БФКЗ АБ.
Одновременно с работой в режиме электроснабжения КА система решает задачи управления положением плоскостей панелей СБ.
По команде с БУСЭС блок БУОСБС осуществляет управление ориентацией СБ на Солнце. БУОСБС может быть реализован на базе системы управления движением и навигацией (СУДН) КА (см. [6]). При этом входной информацией для алгоритма управления СБ являются: положение единичного вектора направления на Солнце относительно связанных с КА осей координат, определяемое алгоритмами кинематического контура СУДН; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла α с датчиков угла (ДУ), установленных на УПСБ. При этом значение α всегда отсчитывается от текущей нормали к рабочей поверхности СБ (т.о. при ориентации СБ на Солнце α минимален). Выходной информацией алгоритма управления являются команды на вращение СБ относительно оси выходного вала УПСБ и команды на прекращение вращения. ДУ УПСБ выдают дискретные сигналы о положении СБ. Величина дискреты определяет точность ориентации СБ.
В штатном режиме ориентации КА, когда направление движения Солнца относительно связанных осей КА неизменно, СБ устанавливается относительно направления на Солнце с опережением по ходу движения Солнца на угол, соответствующий нескольким дискретам ДУ. Далее батарея остается в этом положении до тех пор, пока Солнце, за счет движения КА по орбите, не "переместится вперед" относительно СБ на соответствующий угол. После этого цикл вращения возобновляется.
БРСБЗП управляет СБ при помощи БУСЭС по программным уставкам. Алгоритм управления СБ по программным уставкам позволяет устанавливать батарею в любое задаваемое положение. Для этого выдается первоначально сигнал в БУОСБС об установке СБ в исходное положение. Далее при помощи БУСБЗП осуществляется требуемый разворот на угол αz. При этом для контроля угла разворота в БРСБЗП используется также информация с ДУ УПСБ.
УПУ играет роль интерфейса между БУОСБС, БРСБЗП, БУСБТНЗ и УПСБ.
БИПЭМИ производит постоянное измерение текущих потоков солнечного электромагнитного излучения (ЭМИ) по индексу солнечной активности F10,7 и передает их в БОСА. В БОСА путем сравнения текущих значений с заданными пороговыми определяется начало активности Солнца. По команде, приходящей с первого выхода БОСА на вход БОМВВЧ, в указанном последнем блоке производится определение момента времени возможного начала воздействия частиц высоких энергий на КА. Со второго выхода БОСА через вход БИППЧВЭ выдается команда на начало измерения плотности потока частиц высоких энергий. Информация о моменте времени возможного начала воздействия частиц на КА передается с выхода БОМВВЧ в БОМВУСБТНЗ через его первый вход. На второй вход БОМВУСБТНЗ передается измеренное значение плотности потоков частиц высоких энергий с БИППЧВЭ.
В БОМВУСБТНЗ осуществляется фактическая оценка негативного воздействия ФВС путем сравнения текущего измеренного значения характеристики воздействия с пороговыми значениями, начиная с момента времени, определенного БОМВВЧ. Необходимым условием получения команды на выходе БОМВУСБТНЗ является наличие двух сигналов - с выходов БОМВВЧ и БИППЧВЭ. На выходе БОМВУСБТНЗ формируется команда "начало управления СБ по токам нагрузки", которая поступает в БУСЭС.
Когда БОМВУСБТНЗ выдает команду в БУСЭС, команда, полученная с БОМВУСБТНЗ, является по приоритету более высокой, чем команды на задействование БУОСБС и БРСБЗП. Поэтому, получив указанную команду, БУСЭС отключает от управления УПСБ блоки более низкого приоритета и подключает БУСБТНЗ.
После обнуления команды с БОМВУСБТНЗ на входе БУСЭС последний перестраивает логику своей работы. В зависимости от выполняемой программы полета КА приоритет на управление СБ отдается одному из блоков БУОСБС или БРСБЗП.
БУСБТНЗ определяет угол αs_min по выражению (2). Для расчета указанного угла используются измеренные значения Iн, получаемые с ДТН. Кроме того, с ДУ УПСБ в указанный блок поступает информация о текущем значении угла поворота СБ α. Определив значение угла αs_min, алгоритм, заложенный в БУСБТНЗ, сравнивает его с текущим значением угла α, рассчитывает угол рассогласования между α и αs_min и необходимое число управляющих импульсов для задействования управляющего привода СБ. Управляющие импульсы передаются в УПУ. После преобразования и усиления указанных импульсов в УПУ они поступают на вход УПСБ и приводят привод в движение.
Способ и система для его осуществления, принятые за прототип, имеют существенный недостаток - они не обеспечивают полной защиты поверхности СБ от негативного воздействия потоков частиц высоких энергий и при этом не позволяют использовать дополнительные возможности по уменьшению данного негативного воздействия за счет выполнения специальных операций по подготовке СЭС КА к работе в условиях негативного воздействия потоков частиц высоких энергий на КА.
Задачей, стоящей перед предлагаемыми способом и системой для его осуществления, является уменьшение негативного воздействия потоков частиц высоких энергий на поверхности СБ. Для этого за счет выполнения специальных подготовительных операций в СЭС КА и управления СБ предполагается уменьшить площадь СБ, на которую негативно воздействует поток указанных частиц.
Технический результат достигается тем, что в способе управления положением солнечных батарей космического аппарата, включающем разворот панелей солнечных батарей в рабочее положение, обеспечивающее снабжение космического аппарата электроэнергией, соответствующее совмещению нормали к ее освещенной рабочей поверхности с плоскостью, образуемой осью вращения панелей солнечных батарей и направлением на Солнце, измерение плотности текущего потока солнечного электромагнитного излучения, определение момента времени начала солнечной активности, определение момента времени достижения частицами высоких энергий поверхности космического аппарата, измерение плотности потоков частиц высоких энергий, сравнение измеренных значений плотности потоков частиц высоких энергий с пороговыми значениями, разворот панелей солнечных батарей на угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце, соответствующий минимальной площади воздействия потоков частиц высоких энергий на поверхности солнечных батарей при одновременном обеспечении космического аппарата электроэнергией, в момент времени превышения измеренными значениями плотности потоков частиц высоких энергий пороговых значений и возвращение панелей солнечных батарей в рабочее положение в момент времени, при котором плотность потоков частиц высоких энергий становится ниже пороговых значений, дополнительно определяют моменты времени появления предвестников негативного воздействия потоков частиц высоких энергий на космический аппарат, в моменты времени появления предвестников негативного воздействия потоков частиц высоких энергий на космический аппарат выполняют заряд аккумуляторных батарей системы электроснабжения космического аппарата до максимального уровня заряда, в случае превышения измеряемыми значениями плотности потоков частиц высоких энергий сравниваемых с ними пороговых значений выполняют разворот панелей солнечных батарей до достижения значения угла между нормалью к их освещенной рабочей поверхности и направлением на Солнце αs_min_АБ, соответствующего минимальной площади воздействия потоков частиц высоких энергий на поверхности солнечных батарей при одновременном обеспечении космического аппарата электроэнергией от солнечных и аккумуляторных батарей системы электроснабжения, определяемого соотношением:
αs_min_АБ=arccos(max{0,Iн-IАБ}/Im),
где Iн - ток нагрузки от потребителей космический аппарата,
Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам,
IАБ - текущий допустимый ток разряда аккумуляторных батарей,
и возникающий дефицит электроэнергии на борту космического аппарата компенсируют за счет разряда аккумуляторных батарей, при этом контролируют уровень заряженности аккумуляторных батарей и по достижению минимально допустимого значения уровня заряженности аккумуляторных батарей обнуляют текущее значение допустимого тока разряда аккумуляторных батарей и производят отключение аккумуляторных батарей от внешней нагрузки.
Кроме того, поставленная задача решается тем, что в систему управления положением солнечных батарей космического аппарата, включающую солнечную батарею с установленными на ней четырьмя фотоэлектрическими батареями, устройство поворота солнечных батарей, усилительно-преобразующее устройство, блок управления ориентацией солнечных батарей по направлению на Солнце, блок разворота солнечных батарей в заданное положение, два регулятора тока, блок аккумуляторных батарей, зарядное устройство для аккумуляторных батарей, блок формирования команд на заряд аккумуляторных батарей, датчик тока нагрузки, блок управления системой электроснабжения, шину электроснабжения, блок измерения плотности текущего потока солнечного электромагнитного излучения, блок определения солнечной активности, блок определения момента времени воздействия частиц на космический аппарат, блок измерения плотности потоков частиц высоких энергий, блок определения момента времени начала управления солнечными батареями по токам нагрузки, блок управления солнечными батареями по токам нагрузки, при этом солнечная батарея через свой первый выход, объединяющий выходы двух фотоэлектрических батарей, соединена с первым входом устройства поворота солнечных батарей, и через второй выход, объединяющий выходы двух других фотоэлектрических батарей, соединена со вторым входом устройства поворота солнечных батарей, а выходы блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение соединены соответственно с первым и вторым входами усилительно-преобразующего устройства, выход которого, в свою очередь, соединен с третьим входом устройства поворота солнечных батарей, первый и второй выходы устройства поворота солнечных батарей соединены соответственно с входами первого и второго регуляторов тока, а выходы регуляторов тока соединены с шиной электроснабжения космического аппарата, блок аккумуляторных батарей своим входом, через зарядное устройство для аккумуляторных батарей, соединен с шиной электроснабжения, при этом зарядное устройство аккумуляторных батарей подключено своим первым входом к указанной шине, а ко второму входу зарядного устройства для аккумуляторных батарей подключен датчик тока нагрузки, который подключен, в свою очередь, к шине электроснабжения, блок аккумуляторных батарей своим выходом подключен к первому входу блока формирования команд на заряд аккумуляторных батарей, а ко второму входу указанного блока подключен первый выход блока управления системой электроснабжения, выход блока формирования команд на заряд аккумуляторных батарей подключен к третьему входу зарядного устройства аккумуляторных батарей, второй и третий выходы блока управления системой электроснабжения подключен к первым входам блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение, третий выход устройства поворота солнечных батарей соединен со вторыми входами блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение, выход блока измерения плотности текущего потока солнечного электромагнитного излучения соединен с входом блока определения солнечной активности, первый выход которого, в свою очередь, соединен с входом блока определения момента времени воздействия частиц на космический аппарат, выходы блока определения момента времени воздействия частиц на космический аппарат и блока измерения плотности потоков частиц высоких энергий соединены с соответственно первым и вторым входами блока определения момента времени начала управления солнечными батареями по токам нагрузки, а вход блока измерения плотности потоков частиц высоких энергий соединен со вторым выходом блока определения солнечной активности, выход блока определения момента времени начала управления солнечными батареями по токам нагрузки соединен с входом блока управления системой электроснабжения, четвертый выход которого, в свою очередь, соединен с первым входом блока управления солнечными батареями по токам нагрузки, третий вход и выход которого подключены к соответственно третьему выходу устройства поворота солнечных батарей и третьему входу усилительно-преобразующего устройства, дополнительно введены блок определения потребного тока от солнечных батарей, блок определения моментов времени предвестников негативного воздействия частиц высоких энергий на космический аппарат и блок задания допустимых значений уровня заряженности аккумуляторных батарей, при этом первый и второй входы и выход блока определения потребного тока от солнечных батарей соединены с соответственно вторым выходом датчика тока нагрузки, вторым выходом зарядного устройства аккумуляторных батарей и вторым входом блока управления солнечными батареями по токам нагрузки, выходы блока измерения плотности потоков частиц высоких энергий и блока измерения плотности текущего потока солнечного электромагнитного излучения соединены также с соответственно первым и вторым входами блока определения моментов времени предвестников негативного воздействия частиц высоких энергий на космический аппарат, выход которого соединен со вторым входом блока управления системой электроснабжения, а первый и второй выходы блока задания допустимых значений уровня заряженности аккумуляторных батарей соединены с соответственно третьим входом блока формирования команд на заряд аккумуляторных батарей и четвертым входом зарядного устройства аккумуляторных батарей.
Суть предлагаемого способа состоит в следующем.
Непосредственно защитный отворот СБ от направления негативного воздействия потоков частиц высоких энергий выполняется при превышении плотности потоков частиц высоких энергий некоторых заданных пороговых значений. При этом в качестве начальных шагов, выполняемых до непосредственной реализации защитных мероприятий, осуществляется непрерывный контроль текущего состояния околоземного пространства и текущей солнечной активности и анализируется выполнение и невыполнение критериев опасной радиационной обстановки, в частности критериев контроля солнечной активности, разработанных National Oceanic and Atmospheric Administration (NOAA) (см. [12]). При этом ситуации, когда критерии безусловной опасности еще не выполнены, но уже достигнут порог предшествующего уровня опасности, должны рассматриваться как ситуации-"предвестники" рассматриваемого негативного воздействия.
При появлении предвестников негативного воздействия потоков частиц высоких энергий на КА осуществляют максимальный заряд АБ СЭС КА. Это позволяет в дальнейшем, в моменты превышения измеряемыми значениями плотности потоков частиц высоких энергий сравниваемых с ними пороговых значений, отворачивать рабочие поверхности панелей СБ от направления потоков данных частиц на максимально возможный угол, при условии компенсации возникающего дефицита электроэнергии на борту КА за счет разряда АБ. При этом данное значение αs_min_АБ угла защитного отворота СБ определяется соотношением:

где Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей СБ перпендикулярно солнечным лучам,
IСБ - потребный ток от СБ.
При этом потребный ток от СБ IСБ определяется как минимально необходимый ток, который необходимо вырабатывать СБ для обеспечения потребителей КА с учетом возможностей использования энергии БАБ СЭС КА (т.е. при компенсации возникающего дефицита электроэнергии на борту КА за счет разряда АБ СЭС), исходя из соотношений:

или

где Iн - ток нагрузки от потребителей КА,
IАБ - текущий максимально допустимый ток разряда АБ СЭС КА.
Для реализации способа предлагается система, представленная на чертеже и содержащая следующие блоки:
1 - СБ, на жесткой подложке корпуса которой расположены четыре фотоэлектрических батареи;
2, 3, 4, 5 - БФ1, БФ2, БФ3, БФ4;
6 - УПСБ;
7 - УПУ;
8 - БУОСБС;
9 - БРСБЗП;
10, 11 - РТ1 и РТ2;
12 - БАБ;
13 - ЗРУ АБ;
14 - БФКЗ АБ;
15 - ДТН;
16 - БУСЭС;
17 - ШЭ;
18 - БИПЭМИ;
19 - БОСА;
20 - БОМВВЧ;
21 - БИППЧВЭ;
22 - БОМВУСБТНЗ;
23 - БУСБТНЗ;
24 - блок определения моментов времени предвестников негативного воздействия частиц высоких энергий на космический аппарат (БОМВПНВЧ),
25 - блок определения потребного тока от солнечных батарей (БОПТСБ),
26 - блок задания допустимых значений уровня заряженности аккумуляторных батарей (БЗДЗУЗСБ).
При этом СБ (1) через свой первый выход, объединяющий выходы БФ1 (2) и БФ4 (5), соединена с первым входом УПСБ (6), и через второй выход, объединяющий выходы БФ2 (3) и БФ3 (5), соединена со вторым входом УПСБ (6). Выходы БУОСБС (8) и БРСБЗП (9) соединены соответственно с первым и вторым входами УПУ (7), выход которого, в свою очередь, соединен с третьим входом УПСБ (6). Первый и второй выходы УПСБ (6) соединены соответственно с входами PT1 (10) и РТ2 (11), а выходы PT1 (10) и РТ2 (11) соединены с ШЭ (17). БАБ (12) своим входом через ЗРУ АБ (13) соединен с ШЭ (17). При этом ЗРУ АБ (13) подключено своим первым входом к указанной шине, а ко второму входу ЗРУ АБ (13) подключен выход ДТП (15), вход которого подключен, в свою очередь, к ШЭ (17). БАБ (12) своим выходом подключен к первому входу БФКЗ АБ (14), а ко второму входу указанного блока подключен первый выход БУСЭС (16). Выход БФКЗ АБ (14) подключен к третьему входу ЗРУ АБ (13). Второй и третий выходы БУСЭС (16) подключены соответственно к первым входам БУОСБС (8) и БРСБЗП (9). Третий выход УПСБ (6) соединен со вторыми входами БУОСБС (8) и БРСБЗП (9). Выход БИПЭМИ (18) соединен с входом БОСА (19). Первый выход БОСА (19) соединен с входом БОМВВЧ (20). Выходы БОМВВЧ (20) и БИППЧВЭ (21) соединены с соответственно первым и вторым входами блока БОМВУСБТНЗ (22). Вход БИППЧВЭ (21) соединен со вторым выходом БОСА (19). Выход БОМВУСБТНЗ (22) соединен с первым входом БУСЭС (16). БУСЭС (16) своим четвертым выходом соединен с первым входом БУСБТНЗ (23). Третий выход УПСБ (6) соединен с третьим входом БУСБТНЗ (23). Выход БУСБТНЗ (23) подключен к третьему входу УПУ (7). Первый вход БОПТСБ (25) соединен с вторым выходом ДТН (15). Второй вход БОПТСБ (25) соединен с вторым выходом ЗРУ АБ (13). Выход БОПТСБ (25) соединен с вторым входом БУСБТНЗ (23). Выход БИППЧВЭ (21) соединен с первым входом БОМВПНВЧ (24). Выход БИПЭМИ (18) соединен с вторым входом БОМВПНВЧ (24). Выход БОМВПНВЧ (24) соединен со вторым входом БУСЭС (16). Первый и второй выходы БЗДЗУЗСБ (26) соединены с соответственно третьим входом БФКЗ АБ (14) и четвертым входом ЗРУ АБ (13).
На чертеже также пунктиром показана механическая связь УПСБ (6) с корпусом СБ (1) через выходной вал привода батареи.
В режиме электроснабжения КА система работает следующим образом. УПСБ (6) служит для транзитной передачи электроэнергии от СБ (1) до PT1 (10) и РТ2 (11). Стабилизация напряжения на шине электропитания СЭС осуществляется одним из РТ. В то же время другой РТ находится в состоянии с замкнутыми силовыми транзисторами. Генераторы СБ (1) (БФ1-БФ4) работают в этом случае в режиме короткого замыкания. Когда мощность нагрузки становится больше мощности подключения генераторов СБ (1), в режим стабилизации напряжения переходит другой РТ, и энергия незадействовавшихся генераторов поступает на шину питания СЭС. В отдельные периоды, когда мощность нагрузки может превышать мощность СБ (1), ЗРУ АБ (13), за счет разряда блока АБ (12), компенсирует дефицит электроэнергии на борту КА. Для указанных целей в ЗРУ АБ (13) служит регулятор разряда АБ, который, в частности, осуществляет контроль уровня заряженности АБ и по достижению минимально допустимого значения уровня заряженности АБ, величина которого поступает в ЗРУ АБ (13) от БЗДЗУЗСБ (26), отключает БАБ (12) от внешней нагрузки. При этом ЗРУ АБ (13), исходя из текущего уровня заряженности АБ, определяет и подает на свой второй выход текущее значение допустимого тока разряда АБ (в режиме отключения БАБ (12) от внешней нагрузки данное значение равно нулю).
Кроме указанного регулятора ЗРУ АБ (13) содержит и регулятор заряда АБ. Для проведения зарядно-разрядных циклов в ЗРУ АБ (13) используется информация от ДТН (15). Заряд БАБ (12) осуществляет ЗРУ АБ (13) через БФКЗ АБ (14). Для случая металлводородных АБ он описан в [5]. Суть заключается в том, что по датчикам давления, установленным внутри батарей, и температурах на корпусах батарей производится определение плотности водорода в корпусе АБ. В свою очередь, плотность водорода определяет уровень заряженности АБ. При понижении плотности водорода в батарее ниже установленного уровня выдается команда на ее заряд, а при достижении максимального уровня плотности - на прекращение заряда. Указанные уровни заряда батареи регулируются командами от БФКЗ АБ (14), при этом значения максимально допустимого уровня заряженности АБ поступают в БФКЗ АБ (14) с БЗДЗУЗСБ (26). Поддержание АБ в максимально заряженном состоянии негативно отражается на их состоянии, и АБ поддерживаются в режиме текущего саморазряда, при котором операция заряда АБ выполняется только периодически (например, при управлении СЭС КА "Ямал-100" - раз в несколько суток, при уменьшении уровня заряда БАБ на 30% от максимального уровня).
Одновременно с работой в режиме электроснабжения КА система решает задачи управления положением плоскостей панелей СБ (1).
По команде с БУСЭС (16) блок БУОСБС (8) осуществляет управление ориентацией СБ (1) на Солнце. БУОСБС (8) может быть реализован на базе СУДН КА (см. [6]). При этом входной информацией для алгоритма управления СБ являются: положение единичного вектора направления на Солнце относительно связанных с КА осей координат, определяемое алгоритмами кинематического контура СУДН; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла α с ДУ УПСБ (6). Выходной информацией алгоритма управления являются команды на вращение СБ относительно оси выходного вала УПСБ (6), команды на прекращение вращения. ДУ УПСБ (6) выдают дискретные сигналы о положении СБ (1).
БИПЭМИ (18) производит измерение текущих потоков солнечного ЭМИ и передает их в БОСА (19). В БОСА (19) путем сравнения текущих значений с заданными пороговыми определяется начало активности Солнца. По команде, приходящей с первого выхода БОСА (19) на вход БОМВВЧ (20), в указанном последнем блоке производится определение момента времени возможного начала воздействия частиц высоких энергий на КА. Со второго выхода БОСА (19) через вход БИППЧВЭ (21) выдается команда на начало измерения плотности потока частиц высоких энергий.
С выхода БИППЧВЭ (21) измеренное значение плотности потоков частиц высоких энергий передается на первый вход БОМВПНВЧ (24) и на второй вход БОМВУСБТНЗ (22). На второй вход БОМВПНВЧ (24) с выхода БИПЭМИ (18) подаются измеренные значения текущих потоков солнечного ЭМИ.
В БОМВПНВЧ (24) осуществляется оценка динамики изменения плотности потоков частиц высоких энергий и выявляются ситуации, которые могут рассматриваться как предвестники негативного воздействия частиц на КА. Такими ситуациями являются превышение измеренной плотностью потоков высокоэнергетических частиц заданных критических значений при наличии тенденции к ее дальнейшему повышению. При выявлении и идентификации таких ситуаций используются также данные потоков солнечного ЭМИ, полученные от БИПЭМИ (18). При регистрации в БОМВПНВЧ (24) таких ситуаций-предвестников на выходе данного блока генерируется сигнал, поступающий на второй вход БУСЭС (16).
По команде на втором входе БУСЭС (16) данный блок подает команду на БФКЗ АБ (14), по которой данный блок через ЗРУ АБ (13) осуществляет заряд БАБ (12) до максимального уровня заряда. При этом, для случая металлводородных АБ (см. [5]), по датчикам давления, установленным внутри батарей, и температурах на корпусах батарей производится определение плотности водорода в корпусе АБ, по которой определяется уровень заряженности АБ. При достижении максимального уровня плотности выдается команда на прекращение заряда.
На входы БОПТСБ (25) со вторых выходов ДТН (15) и ЗРУ АБ (13) поступают текущие значения тока нагрузки от потребителей КА Iн и допустимого тока разряда АБ IАБ. Используя данные значения БОПТСБ (25), по соотношениям (4), (5) определяет значение IСБ - текущее минимально допустимое значение потребного тока от СБ (с учетом возможности использования потребителями энергии от БАБ (12)), и выдает его на второй вход БУСБТНЗ (23).
Информация о моменте времени возможного начала воздействия частиц на КА передается с выхода БОМВВЧ (20) в БОМВУСБТНЗ (22) через его первый вход. В БОМВУСБТНЗ (22) осуществляется фактическая оценка негативного воздействия ФВС путем сравнения текущего измеренного значения характеристики воздействия с пороговыми значениями, начиная с момента времени, определенного БОМВВЧ (20). Необходимым условием получения команды на выходе БОМВУСБТНЗ (22) является наличие двух сигналов - с выходов БОМВВЧ (20) и БИППЧВЭ (21).
Когда БОМВУСБТНЗ (22) выдает команду на первый вход БУСЭС (16), данный блок генерирует команду на своем четвертом выходе, которая подключает к управлению СБ БУСБТНЗ (23).
БУСБТНЗ (23) определяет угол αs_min_АБ по выражению (3). Для расчета указанного угла используется текущее значение потребного тока от СБ, получаемое с БОПТСБ (25). Кроме того, с ДУ УПСБ (6) в указанный блок поступает информация о текущем значении угла поворота СБ α. Определив значение угла αs_min_АБ, алгоритм, заложенный в БУСБТНЗ (23), сравнивает его с текущим значением угла α и рассчитывает угол рассогласования между α и αs_min_АБ и необходимое число управляющих импульсов для задействования управляющего привода СБ (1). Управляющие импульсы передаются в УПУ (7). После преобразования и усиления указанных импульсов в УПУ (7) они поступают на вход УПСБ (6) и приводят привод в движение.
Когда БОМВУСБТНЗ (22) не выдает команду на первый вход БУСЭС (16), данный блок, в зависимости от выполняемой программы полета КА, передает управление СБ (1) одному из блоков БУОСБС (8) и БРСБЗП (9).
Функционирование БУОСБС (8) описано выше.
БРСБЗП (9) управляет СБ (1) по программным уставкам. Алгоритм управления СБ (1) по программным уставкам позволяет устанавливать батарею в любое задаваемое положение α=αz. При этом для контроля угла разворота в БРСБЗП (9) используется информация с ДУ УПСБ (6).
Реализация БОМВУСБТНЗ (22) и БОМВПНВЧ (24) возможна как на базе аппаратно-программных средств ЦУП КА, так и на борту КА. На выходах БОМВУСБТНЗ (22) и БОМВПНВЧ (24) формируются, соответственно, команды "начало управления СБ по токам нагрузки" и "начало управления СЭС в режиме подготовки к негативному воздействию высокоэнергетических частиц на КА", которые поступают в БУСЭС (16), при этом последняя команда функционально воспринимается БУСЭС (16) как команда на выполнение заряда АБ до максимального уровня заряда.
Примером реализации БУСЭС (16) могут служить радиосредства служебного канала управления (СКУ) бортовыми системами КА "Ямал-100", состоящие из земной станции (ЗС) и бортовой аппаратуры (БА) (см. описание в [10, 11]). В частности, БА СКУ совместно с ЗС СКУ решает задачи выдачи в бортовую цифровую вычислительную систему (БЦВС) КА цифровой информации (ЦИ) и последующего ее квитирования. БЦВС, в свою очередь, осуществляет управление блоками БУОСБС (8), БРСБЗП (9), БУСБТНЗ(23), БФКЗ АБ (14).
В данной реализации БУСЭС (16) взаимодействие БА СКУ в части обмена ЦИ осуществляется по магистральному каналу обмена (МКО) в соответствии с интерфейсом MIL-STD-1553. В качестве абонента БЦВС используется прибор - блок сопряжения (БС) из состава БА СКУ. Процессор БЦВС периодически делает опросы состояния БС для определения доступности пакета данных. Если пакет доступен, то процессор начинает обмен данными.
УПУ (7) играет роль интерфейса между БУОСБС (8), БРСБЗП (9), БУСБТНЗ (23) и УПСБ (6) и служит для преобразования цифровых сигналов в аналоговые и усиление последних.
БУСБТНЗ (23) является бортовым блоком КА, команды на который приходят от БУСЭС (16). Реализация БУСБТНЗ (23), БОПТСБ (25), БЗДЗУЗСБ (26) может быть выполнена на базе БЦВС КА (см. [6], [8]).
Таким образом, рассмотрен пример реализации основополагающих блоков системы.
Опишем технический эффект предлагаемых изобретений.
Предлагаемые технические решения обеспечивают уменьшение негативного воздействия потоков частиц высоких энергий на рабочую поверхность СБ в моменты выполнения режима "защитного" отворота СБ от направления на Солнце. Это достигается уменьшением площади рабочей поверхности СБ, на которую негативно воздействуют потоки данных частиц, путем максимального увеличения угла отворота нормали к рабочей поверхности СБ от направления на Солнце, при гарантированном выполнении требования обеспечения КА электроэнергией. Максимизация угла отворота достигается тем, что СЭС КА заранее приводится в состояние максимального заряда АБ, что обеспечивает возможность реализации максимально-возможного угла "защитного" отворота СБ от направления на Солнце. Учитывая, например, что при управлении СЭС КА "Ямал-100" после операции заряда АБ до максимального уровня увеличение возможного тока разряда АБ составляет порядка 30%, то соответствующее увеличение угла "защитного" отворота СБ и, как следствие, уменьшение негативного воздействия потоков частиц высоких энергий на рабочую поверхность СБ составляет существенную величину.
ЛИТЕРАТУРА
1. Елисеев А.С. Техника космических полетов. Москва, "Машиностроение", 1983.
2. Раушенбах Г. Справочник по проектированию солнечных батарей. Москва, Энергоатомиздат, 1983.
3. Правила полета при выполнении совместных операций ШАТТЛА и МКС. Том С. Управление полетных операций. Космический центр им. Линдона Б.Джонсона. Хьюстон, Техас, основной вариант, 8.11.2001.
4. Система электроснабжения КА. Техническое описание. 300ГК.20Ю. 0000-АТО. РКК "Энергия", 1998.
5. Центер Б.И., Лызлов Н.Ю., Металлводородные электрохимические системы. Ленинград. "Химия", Ленинградское отделение, 1989.
6. Система управлением движением и навигации КА. Техническое описание. 300ГК.12Ю. 0000-АТО. РКК "Энергия", 1998.
7. Гальперин Ю.И., Дмитриев А.В., Зеленый Л.М., Панасюк Л.М. Влияние космической погоды на безопасность авиационных и космических полетов. "Полет 2001", стр.27-87.
8. Инженерный справочник по космической технике. Изд-во МО ССР, М., 1969.
9. Грилихес В.А., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. Москва, "Наука", 1984.
10. Земная станция служебного канала управления КА "Ямал". Руководство по эксплуатации. ЗСКУГК.0000-ОРЭ. РКК "Энергия", 2001.
11. Бортовая аппаратура служебного канала управления КА "Ямал". Техническое описание. 300ГК.15Ю. 0000А201-ОТО. РКК "Энергия", 2002.
12. Ковтун B.C., Соловьев С.В., Заикин С.В., Городецкий А.А. Способ управления положением солнечных батарей космического аппарата и система для его осуществления. Патент РФ 2242408 по заявке 2003108114/11 от 24.03.2003 г.
Изобретения относятся к электроснабжению космических аппаратов (КА) с помощью солнечных батарей (СБ). Предлагаемый способ включает разворот панелей СБ в рабочее положение, соответствующее совмещению нормали к их освещенной поверхности с плоскостью, образуемой осью вращения панелей СБ и направлением на Солнце. При этом измеряют плотности потоков солнечного электромагнитного излучения и частиц высоких энергий, определяя моменты начала солнечной активности и достижения указанными частицами поверхности КА. Дополнительно определяют моменты появления предвестников негативного воздействия потоков указанных частиц на КА. В эти моменты заряжают бортовые аккумуляторные батареи КА до максимального уровня. При превышении плотностями потоков частиц пороговых значений разворачивают панели СБ на угол между указанной нормалью и направлением на Солнце, соответствующий минимальной площади воздействия потоков частиц на поверхности СБ. Дефицит электроэнергии на борту КА покрывают за счет разряда аккумуляторных батарей. При достижении минимально допустимого уровня заряженности этих батарей производят их отключение от нагрузки. По окончании воздействия частиц на КА возвращают панели СБ в рабочее положение. Предлагаемая система управления включает в себя необходимые блоки и связи между ними для выполнения описанных выше операций. Причем в нее введены блок определения потребного тока от СБ, блок определения моментов появления предвестников негативного воздействия частиц высоких энергий на КА, блок задания допустимого уровня заряженности аккумуляторных батарей. Технический результат изобретений состоит в ослаблении негативного воздействия потоков частиц высоких энергий на рабочую поверхность СБ путем максимального увеличения угла "защитного" отворота СБ от направления этих потоков от Солнца. 2 н.п. ф-лы, 1 ил.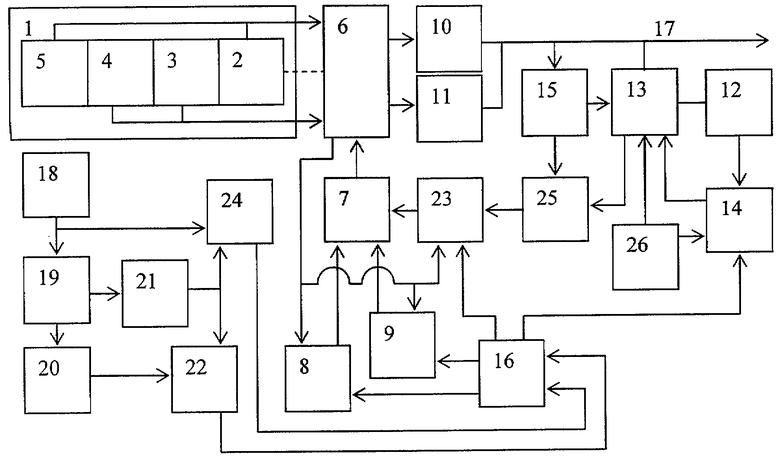
αs_min_АБ=arccos (max{0, Iн-IАБ}/Im),
где Iн - ток нагрузки потребителей космический аппарата;
Im - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам;
IАБ - текущий допустимый ток разряда аккумуляторных батарей, и возникающий дефицит электроэнергии на борту космического аппарата компенсируют за счет разряда аккумуляторных батарей, при этом контролируют уровень заряженности аккумуляторных батарей и по достижению минимально допустимого значения этого уровня обнуляют текущее значение допустимого тока разряда аккумуляторных батарей и производят отключение аккумуляторных батарей от внешней нагрузки.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| US 6227497 А, 08.05.2001 | |||
| US 5653407 А, 05.08.1997 | |||
| US 5257759 А, 02.11.1993. | |||

