Область техники
Настоящее изобретение относится к области электронных устройств связи. Более конкретно изобретение относится к устройству ввода, основанному на вводе двумерных данных положения.
Предпосылки создания изобретения
Обычное электронное устройство, как правило, оборудовано одним или несколькими стандартными устройствами ввода, такими как клавиатура, цифровая клавиатура, плоская сенсорная панель или устройство ввода, требующее рабочей плоскости, такое как мышь или шаровой указатель. Однако для небольших карманных электронных устройств пользователям часто не хватает пространства, чтобы работать с обычными плоскими устройствами ввода. С электронными устройствами, такими как персональный цифровой секретарь (PDA) и сотовые телефоны, которые становятся все более мощными и компактными, возникают проблемы интерфейса машина - пользователь. Обычное решение состоит в использовании сенсорных панелей с просматриваемым экраном, в частности сенсорных клавиатур, электронных книг или электронной бумаги.
Проблема, связанная с обычным плоским устройством ввода данных или типовой сенсорной клавиатурой, состоит в том, что рука и пальцы пользователя мешают ему видеть экран, когда пользователь манипулирует клавиатурой. Например, выбор текста путем скольжения пальцами по экрану переносного устройства может оказаться довольно сложным. Кроме того, руки человека способны перемещаться в трехмерном пространстве, в то время как типовой интерфейс человек - машина обычно является одномерным.
Сущность изобретения
Предлагается устройство ввода с многорежимной переключательной функцией, которое включает корпус, сенсорный модуль с дугообразной поверхностью и управляющий модуль. Сенсорный модуль с дугообразной поверхностью расположен на поверхности корпуса и служит для ввода двумерных данных положения. Управляющий модуль служит для переключения режима ввода устройства ввода, основанного на двумерных данных положения, и формирует управляющий сигнал, на основе режима переключения ввода при вводе двумерных данных положения. В одном варианте воплощения изобретения управляющий модуль используется для преобразования двумерных данных положения в трехмерные данные положения, на основе геометрических характеристик корпуса, и для переключения режима ввода устройства ввода, основанного на трехмерных данных положения, и затем формирования управляющего сигнала, основанного на режиме переключения ввода и трехмерных данных положения.
Краткое описание чертежей
Пример воплощения настоящего изобретения будет лучше понят из приведенного ниже подробного описания, и из прилагаемых чертежей различных вариантов воплощения изобретения, которые, однако, не должны быть поняты как ограничивающие изобретение определенными вариантами, и служат только для объяснения и понимания сущности изобретения.
Фигура 1А - принципиальная схема устройства ввода с многорежимной переключательной функцией в соответствии с одним вариантом воплощения настоящего изобретения;
Фигура 1В - система, в которой используется устройство ввода с многорежимной переключательной функцией в соответствии с одним вариантом воплощения настоящего изобретения;
Фигура 1С - вид спереди на устройство ввода с многорежимной переключательной функцией в соответствии с одним вариантом воплощения настоящего изобретения;
Фигура 2А - схема режима ввода в соответствии с одним вариантом воплощения настоящего изобретения;
Фигуры 2В-2Е - блок-схемы, иллюстрирующие сочетание различных двумерных данных положения, полученных сенсорным модулем с дугообразной поверхностью в соответствии с одним вариантом воплощения настоящего изобретения;
Фигура 3А - схема, иллюстрирующая пример режима ввода в соответствии с одним вариантом воплощения настоящего изобретения;
Фигура 3В - блок-схема, иллюстрирующая комбинацию различных двумерных данных положения, обнаруживаемых сенсорным модулем с дугообразной поверхностью в соответствии с одним вариантом воплощения настоящего изобретения;
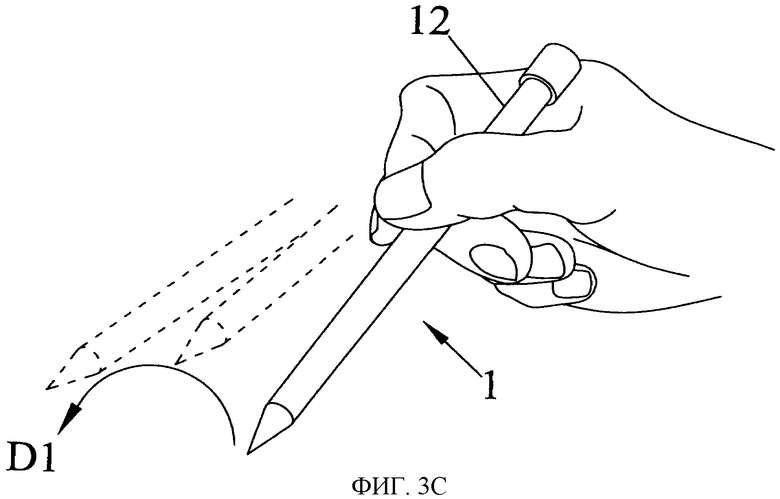
Фигура 3С - работа устройства ввода карандашного типа в соответствии с настоящим изобретением;
Фигура 4А - схема, иллюстрирующая другой пример режима ввода в соответствии с одним вариантом воплощения настоящего изобретения;
Фигура 4В - схема, иллюстрирующая комбинацию различных двумерных данных положения, полученных сенсорным модулем с дугообразной поверхностью в соответствии с одним вариантом воплощения настоящего изобретения;
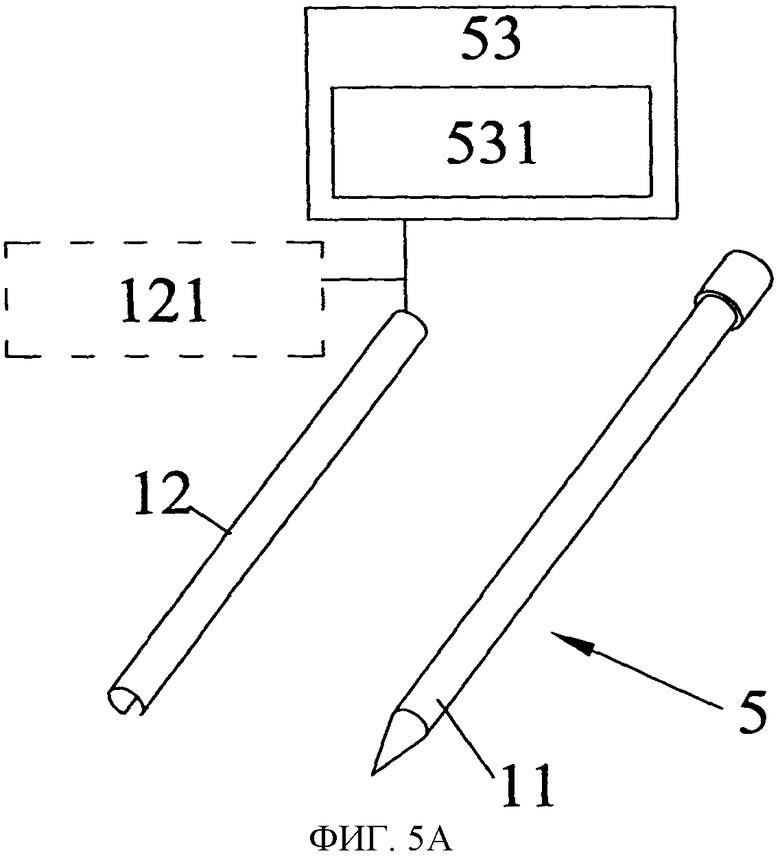
Фигура 5А - блок-схема, иллюстрирующая альтернативный пример устройства ввода с многорежимной переключательной функцией в соответствии с одним вариантом воплощения настоящего изобретения;
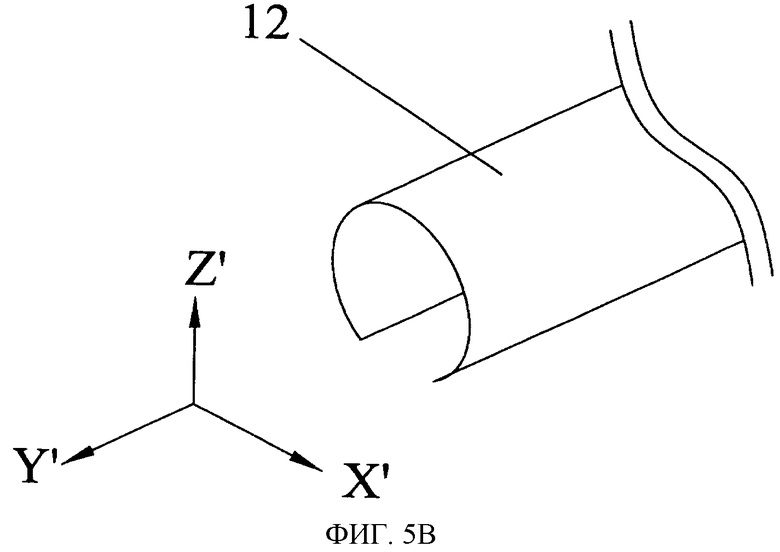
Фигура 5В - преобразование двумерной координаты в трехмерную координату сенсорным модулем с дугообразной поверхностью в соответствии с одним вариантом воплощения настоящего изобретения;
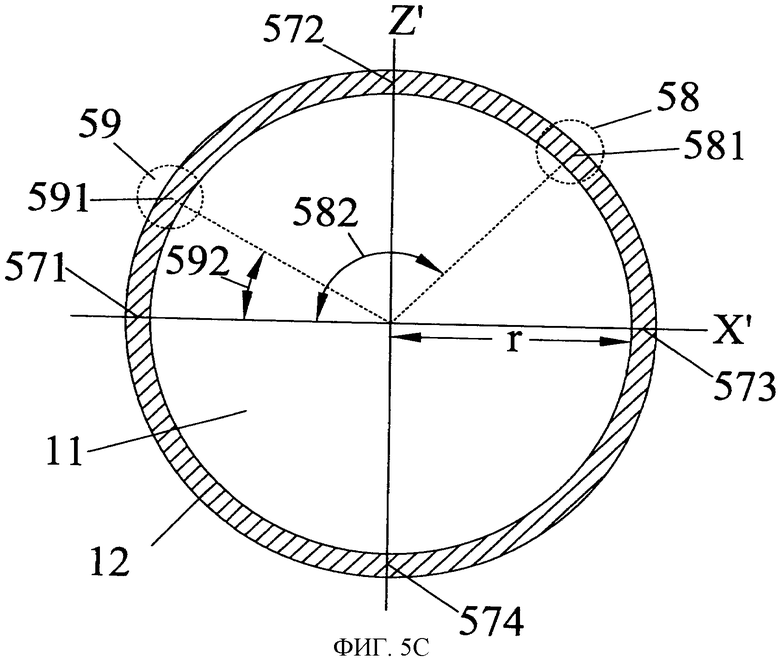
Фигура 5С - принципиальная схема преобразования координаты оси X в координату X'-Z' в соответствии с одним вариантом воплощения настоящего изобретения;
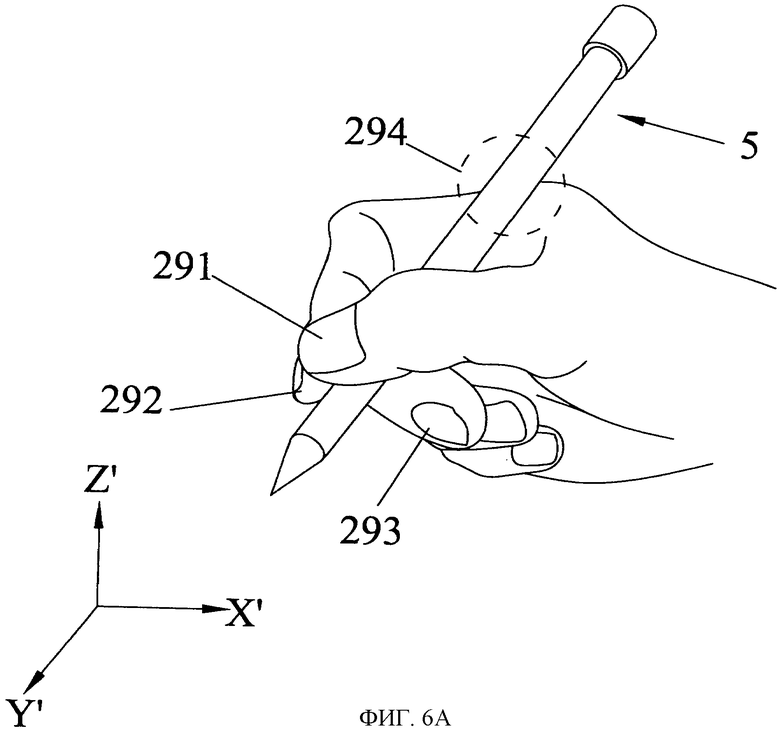
Фигура 6А - пример устройства ввода с многорежимной переключательной функцией в соответствии с одним вариантом воплощения настоящего изобретения;
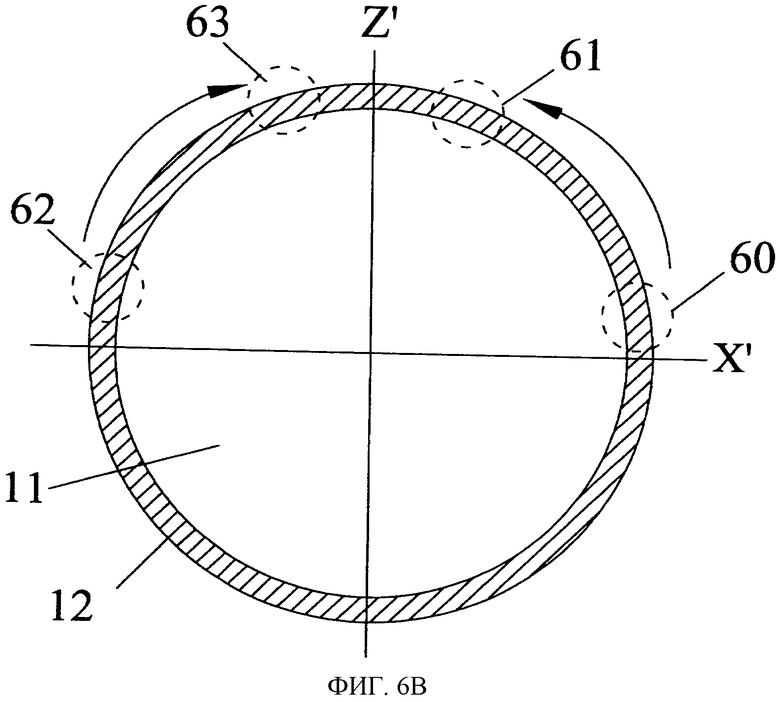
Фигура 6В - схема работы устройства ввода с многорежимной переключательной функцией в трехмерных координатах в соответствии с одним вариантом воплощения настоящего изобретения; и
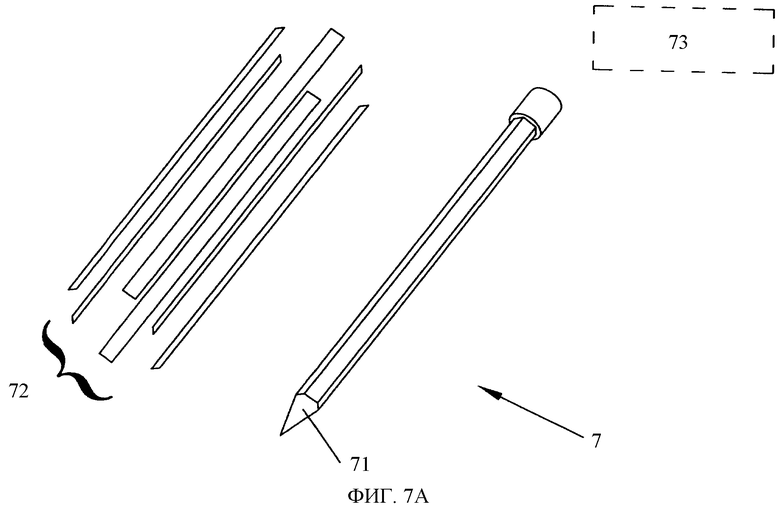
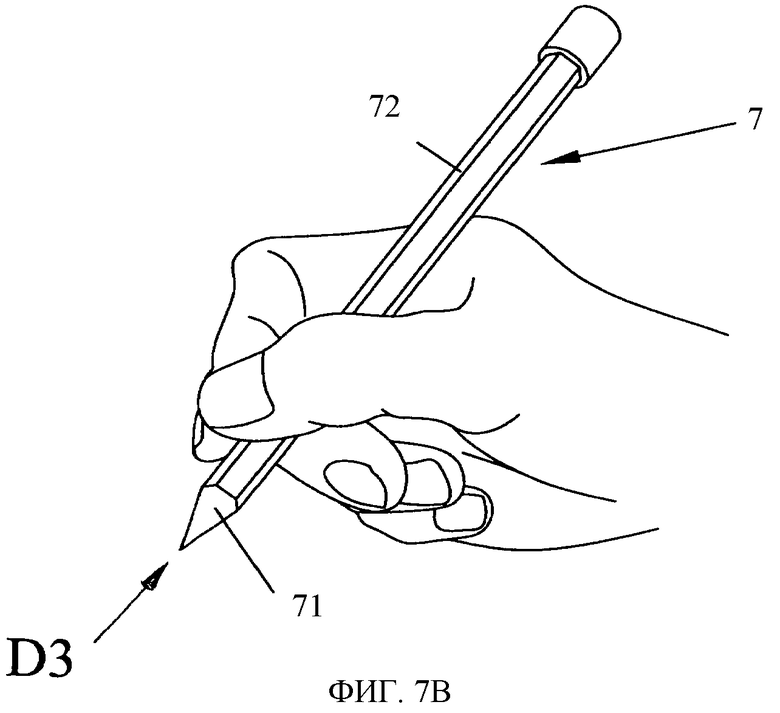
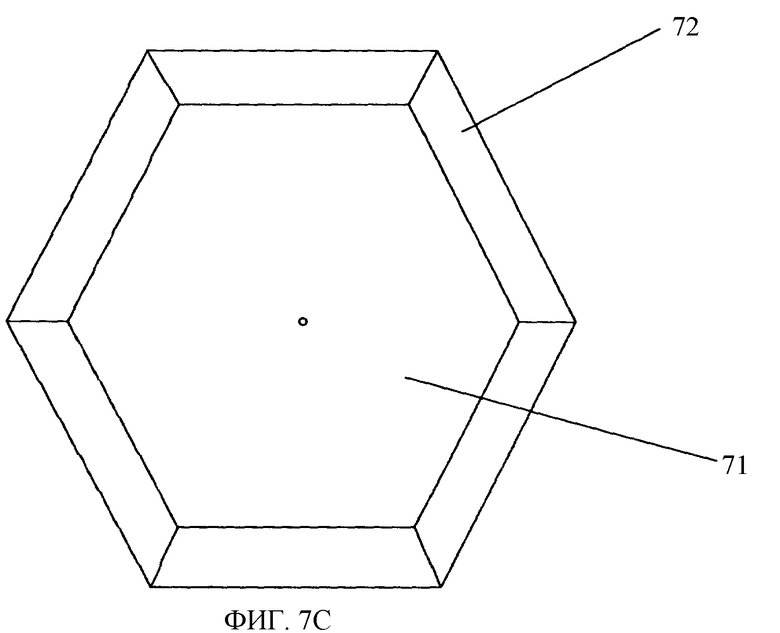
Фигуры 7А-7С иллюстрируют другой пример устройства ввода карандашного типа в соответствии с одним вариантом воплощения настоящего изобретения.
Подробное описание изобретения
Ниже описывается пример воплощения настоящего изобретения в виде способа, системы и устройства для создания пользовательского интерфейса, имеющего многорежимную переключательную функцию.
Обычные специалисты в данной области техники понимают, что последующее подробное описание примерного воплощения (воплощений) является чисто иллюстративным и, в любом случае, не предназначено ограничить это изобретение конкретным примером. Квалифицированными специалистами могут быть предложены другие варианты воплощения на основе раскрытия изобретения. Теперь обратимся к подробному описанию примерного воплощения (воплощений) изобретения, как оно показано на прилагаемых чертежах. На различных чертежах будут использованы одни и те же цифровые обозначения для одинаковых узлов или частей.
В соответствии с одним вариантом воплощения настоящего изобретения описанные здесь компоненты, стадии процесса, и/или структуры данных могут быть выполнены, используя различные типы операционных систем, вычислительных платформ, компьютерных программ и/или универсальных аппаратных средств. Кроме того, обычные специалисты в данной области техники поймут, что устройства менее универсального характера, такие как аппаратные средства общего назначения, логические микросхемы, программируемые в условиях эксплуатации (FPGA), определенные применяемые интегральные схемы (специализированные интегральные схемы) или тому подобные устройства могут также использоваться, не выходя из объема и духа раскрытого здесь изобретения. Если способ, состоящий из нескольких последовательных стадий, осуществляется компьютером или машиной, и эти стадии процесса могут быть сохранены в виде последовательности команд, считываемых компьютером, они могут быть сохранены на материальном носителе, таком как среда памяти (например, ROM (постоянное запоминающее устройство), ППЗУ (программируемое постоянное запоминающее устройство), СППЗУ (электрически стираемая программируемая постоянная память), флэш-память, карты памяти и т.д.), магнитный носитель данных (например, лента, магнитный дисковод и т.д.), оптический носитель данных (например, CD-ROM, ROM цифрового видеодиска, бумажная лента и перфолента и т.д.) и другие известные типы памяти для хранения программ.
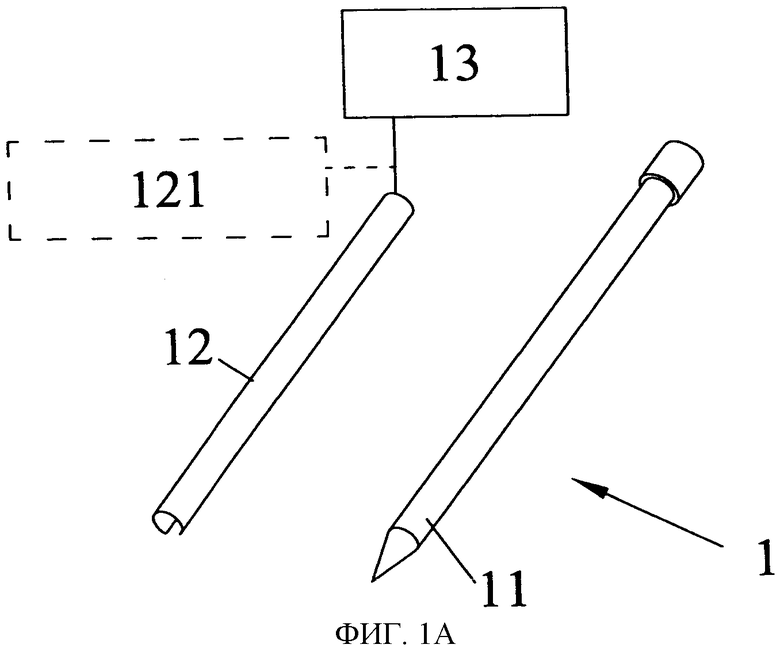
Фигуры 1А и 1В представляют устройство ввода 1 с многорежимной функцией в соответствии с одним вариантом воплощения настоящего изобретения. Устройство ввода 1 включает корпус 11, сенсорный модуль 12 с дугообразной поверхностью и управляющий модуль 13. С другой стороны, устройство ввода 1 также известно как устройство ввода 1 карандашного типа. Термины "устройство ввода" и "устройство ввода карандашного типа" в дальнейшем могут быть использованы взаимозаменяемо. Кроме того, сенсорный модуль 12 с дугообразной поверхностью также известен как выпуклый сенсорный модуль. Термины "сенсорный модуль с дугообразной поверхностью" и "выпуклый сенсорный модуль" в дальнейшем могут быть использованы взаимозаменяемо. Следует отметить, что сущность примерного воплощения (воплощений) настоящего изобретения не изменилось бы, если бы один или несколько блоков (каналов или элементов) были бы добавлены к устройству или удалены из устройства, показанного на фигурах 1А-1С.
В этом варианте воплощения изобретения корпус 11 является трубчатым элементом с цилиндрической поверхностью, при этом корпус 11 может быть конусом, сферой или любым геометрическим телом с дугообразными поверхностями. Сенсорный модуль 12 с дугообразной поверхностью расположен на и/или покрывает поверхность корпуса 11 и служит для обнаружения и/или ввода двумерных данных положения 121. Сенсорный модуль 12 с дугообразной поверхностью в одном варианте воплощения изобретения является гибкой сенсорной панелью. Управляющий модуль 13 включает режим ввода устройства ввода 1, основанного на двумерных данных положения 121. Двумерные данные положения 121 в одном варианте воплощения изобретения содержат информацию, относящуюся к положениям, обнаруженным рукой на сенсорном модуле с дугообразной поверхностью 12. Кроме того, данные положения 121 могут дополнительно включать данные движения, которые указывают на обнаруженный объект, движущийся по дугообразной поверхности сенсорного модуля 12.
Во время работы, когда пользователь держит устройство ввода 1 различным образом или в различных положениях, например удерживает вертикально датчиком вверх, удерживает в обратном положении, держит двумя руками, держит как кисть и т.д., сенсорный модуль 12 с дугообразной поверхностью получает сочетание различных двумерных данных положения в зависимости от типа удержания. Управляющий модуль 13 может различать один из типов удержания или одно из положений устройства ввода 1. Например, управляющий модуль 13 может идентифицировать типы удержания на основе относительных отношений этих двумерных данных положения и переключает устройства ввода 1 в режим ввода в соответствии с типом удержания устройства.
Режим ввода может быть одним из режимов наложения рисунка, режимом просмотра, режимом редактирования, режимом мультимедийного вещания, режимом ввода с клавиатуры или тому подобным режимом. Для различных режимов ввода формируются различные соответствующие управляющие сигналы. Например, в режиме просмотра управляющие сигналы могут быть сформированы для предыдущей страницы, последующей страницы и двигающегося курсора. Альтернативно, управляющие сигналы мультимедийного вещания могут быть сформированы для передачи, паузы, остановки, отправки сообщения и изменения мультимедийного режима вещания.
Управляющий модуль 13 служит для формирования управляющих сигналов для управления электронным устройством 19, как показано на фигуре 1В, и в сочетании с устройством ввода 1 и электронным устройством 19 имеет следующие устройства:
(i) устройство ввода 1, закрепленное на электронном устройстве;
(ii) устройство ввода 1 является независимым устройством, которое может быть снято с электронного устройства 19, и устройство ввода 1 дополнительно включает модуль передачи сигнала для передачи управляющего сигнала через беспроводное соединение с электронным устройством 19;
(iii) управляющий модуль 13 устройства ввода 1 расположен на электронном устройстве 19, и корпус 11 и сенсорный модуль 12 устройства ввода 1 встроены в независимое устройство, которое может быть отделено от электронного устройства 19. Устройство ввода 1 дополнительно включает модуль передачи сигнала для передачи двумерных данных положения 121 на управляющий модуль 13, и затем модуль формирует управляющие сигналы и передает эти сигналы на электронное устройство 19.
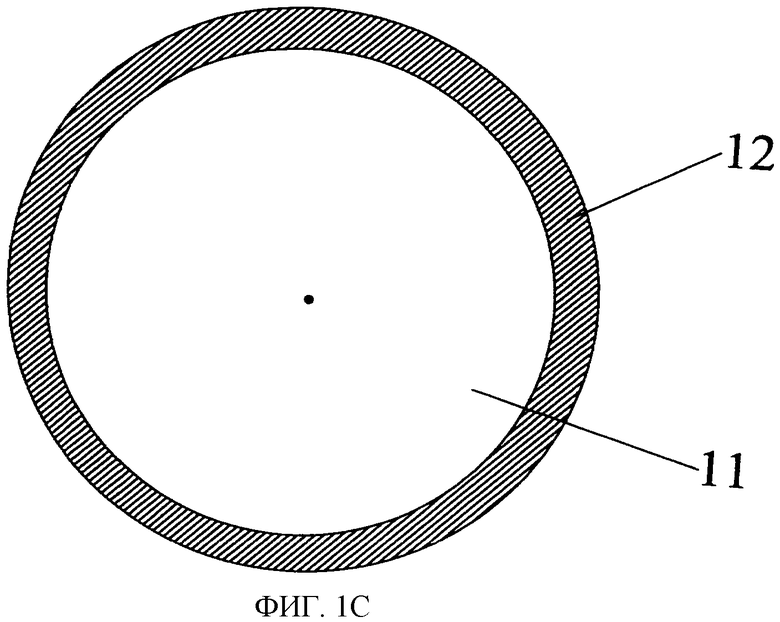
Фигура 1С - вид спереди на устройство ввода карандашного типа, в котором вид спереди также обозначен буквой D, как показано на фигуре 1В. Устройство ввода 1 карандашного типа имеет столбчатый корпус 11, выпуклый сенсорный модуль 12 и модуль передачи сигнала (не показан). Столбчатый корпус 11 предпочтительно находится в стержне цилиндрической или похожей на перо формы. Выпуклый сенсорный модуль 12 установлен на столбчатом корпусе 11. Выпуклый сенсорный модуль 12 используется для считывания двумерных данных и последующей передачи сигнала, основанного на двумерных данных, на электронное устройство 19 через модуль передачи сигнала. Сигнал содержит сведения о положении выпуклого сенсорного модуля 12 или о движении выпуклого сенсорного модуля 12, осуществляемого рукой пользователя.
Преимущество использования устройства ввода такого типа состоит в повышении оперативного удобства и производительности устройства пользовательского интерфейса.
Другое преимущество использования устройства ввода с многорежимной переключательной функцией состоит в согласовании устройства ввода с анатомией руки, благодаря чему пользователь может оперировать устройством ввода более удобным образом.
Еще одним преимуществом использования устройства данного ввода является то, что устройство ввода может переключиться между различными режимами ввода, что увеличивает эффективность ввода данных.
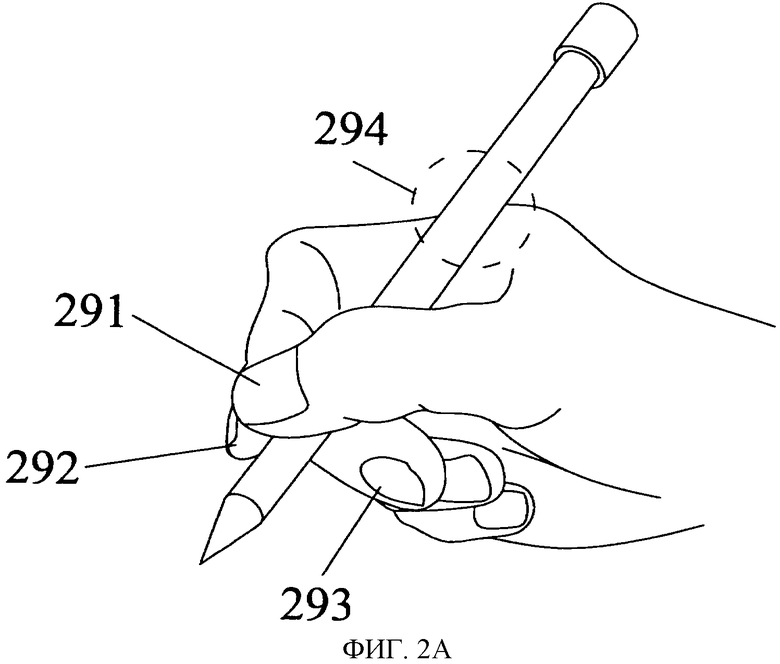
Обращаясь к фигуре 2А, мы видим, что пользователь держит устройство ввода 1 карандашного типа одной рукой и касается выпуклого сенсорного модуля 12 для управления электронным устройством 19, в котором средство управления выполняет операции прокрутки, пейджинга вверх/вниз, отмечает цифровое информационное наполнение и т.д. Устройство ввода 1 карандашного типа, в одном варианте воплощения изобретения, может быть встроено в электронное устройство 19 для удобства пользования, и, таким образом, число рабочих клавиш электронного устройства 19 может быть сокращено, и площадь экрана может быть увеличена.
Устройство ввода 1 карандашного типа в одном варианте воплощения изобретения включает, по меньшей мере, один датчик для обнаружения физической величины устройства ввода 1 карандашного типа, и этот датчик предпочтительно включает датчик ускорения, датчик восприятия гравитации, гироскоп или цифровой компас для обнаружения ускорения, угла наклона, угла вращения или направления контакта устройства ввода 1 карандашного типа. Кроме того, сигнал, основанный на двумерных данных или физической величине, обнаруженных датчиком, может использоваться для выдачи операционной команды через модуль идентификации машинной команды, который позволяет пользователю использовать более сложные и разнообразные методы работы. Модуль идентификации машинной команды может быть установлен либо в столбчатом корпусе 11, либо в электронном устройстве 19.
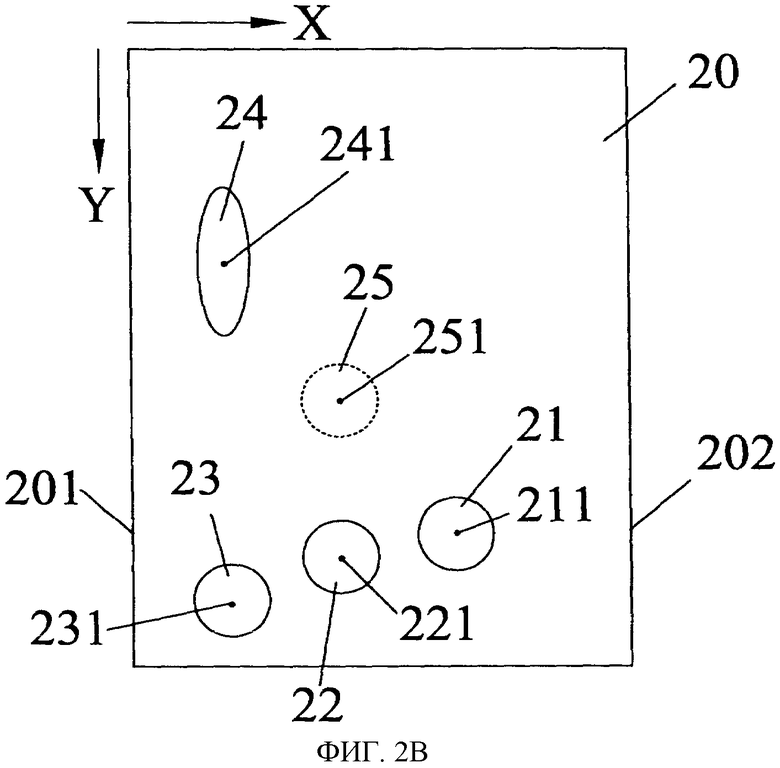
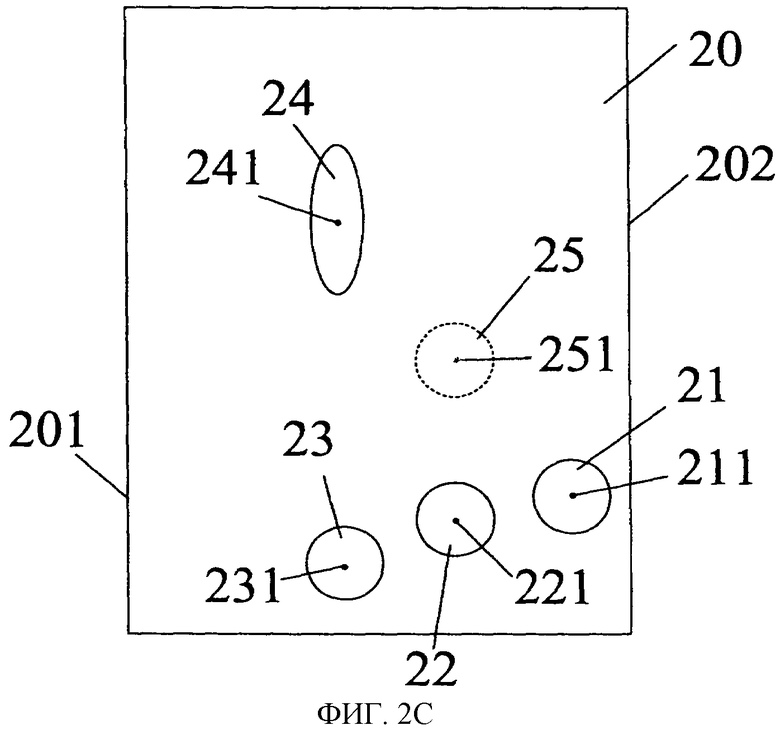
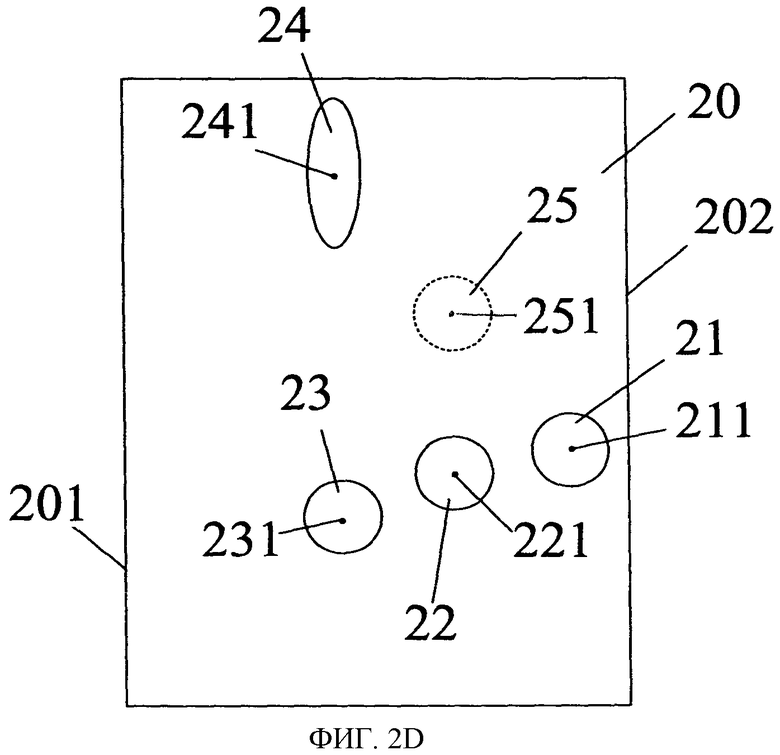
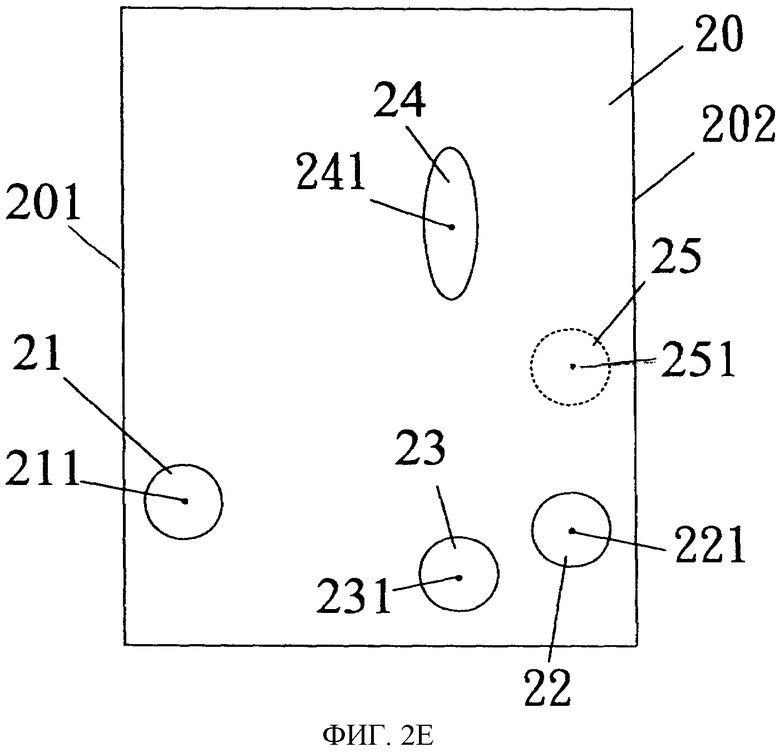
Фигуры 2А и 2Е представляют комбинации различных двумерных данных положения, обнаруживаемые сенсорным модулем с дугообразной поверхностью в соответствии с одним вариантом воплощения настоящего изобретения. Отметим, что плоскость 20 представляет положение контакта с сенсорным модулем с дугообразной поверхностью, показанного на фигуре 2В. Верхний левый угол плоскости 20 является началом двумерных координат, в котором правая стрелка указывает на положительное направление оси X, и направленная вниз стрелка указывает на положительное направление оси Y для двумерных координат. Следует отметить, что угол правой нижней части плоскости 20 является максимальной координатой. В этом варианте воплощения изобретения плоскость 20 расположена на цилиндрической поверхности корпуса 1, в котором края 201 и 202 соединены, и вершина плоскости 20 расположена в задней части устройства ввода 1. Основание плоскости 20 расположено на переднем конце пользовательского интерфейса устройства ввода 1.
На Фигуре 2А показан пользователь, который удерживает передний конец устройства ввода 1. Большой палец пользователя 291 касается участка 21 плоскости 20, и указательный палец 292 касается участка 22 плоскости 20. Средний палец 293 касается участка 23 плоскости 20, и часть руки 294 между большим пальцем 291 и указательным пальцем 292 находится в контакте с участком 24 плоскости 20. Дугообразный сенсорный модуль интерфейса 12, в одном из вариантов воплощения изобретения обнаруживает и вводит двумерное положение 211, двумерное положение 221, двумерное положение 231 и двумерное положение 241. Как показано на фигуре 2В, центральная точка используется как позиция этой области, но она этим не ограничена. Следует отметить, что специалист в данной области в случае необходимости может сам разработать относительные положения области контакта и позиций.
Для того чтобы повысить оперативное удобство устройства ввода 1, пользователь может работать, не различая начала координат управляющего модуля 12 с дугообразной поверхностью. Управляющий модуль 13 конфигурирован для использования относительного движения множества положений касания, чтобы отличить тип удержания пользователем устройства ввода 1. Например, управляющий модуль 13 получает данные о четырех положениях касания, как показано на фигуре 2В, где координата Y соответствующих положений касания 211-231 ближе к координате Y другого положения касания 241. В этом случае в соответствии с координатой Y в предопределенной области положения касания 241 управляющий модуль 13 может различить тип удержания устройства пользователем, как показано на фигуре 2А. Следовательно, даже если абсолютное положение области касания на фигурах 2С-2Е отличается от абсолютных положений, как показано на фигуре 2В, управляющий модуль 13 получает двумерные данные положения, как показано на фигуре 2В и фигуре 2Е. Соответственно подобный тип удержания может быть идентифицирован как основанный на относительных положениях.
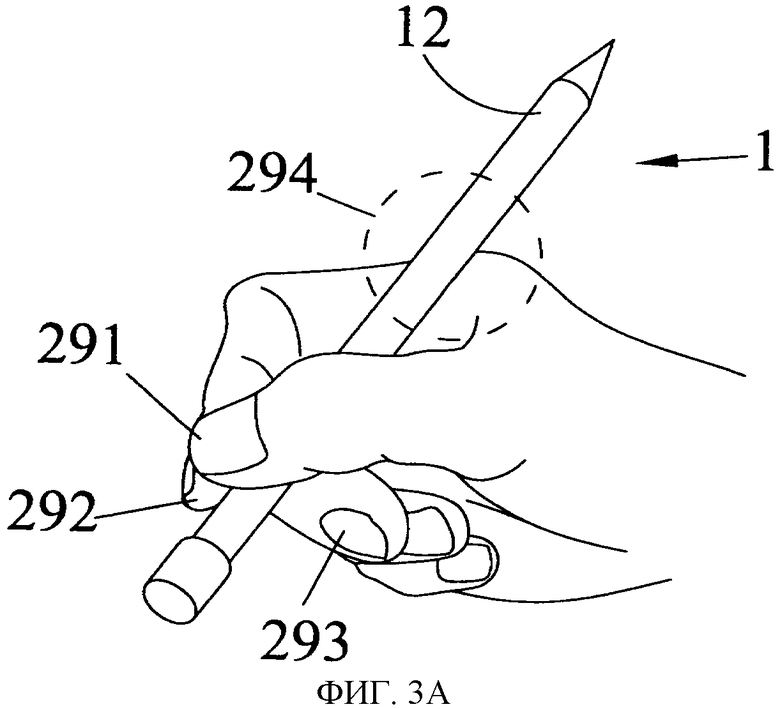
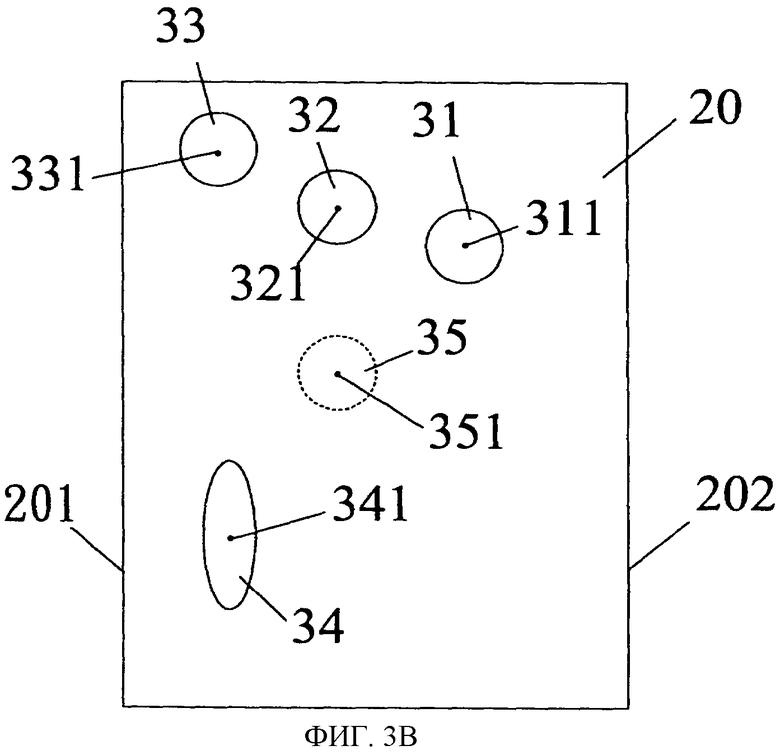
Фигуры 3А-3С представляют альтернативные примеры типов удержания, относящихся к режимам ввода устройства ввода в соответствии с одним вариантом воплощения настоящего изобретения. На схемах показаны комбинации приема двумерных данных положения сенсорного модуля с дугообразной поверхностью, при котором пользователь считывает данные устройством ввода 1 в обратном порядке, то есть держит задний конец устройства ввода 1. В одном примере модуль идентификации машинной команды определяет, удерживает ли пользователь передний конец устройства ввода 1 карандашного типа в соответствии с двумерным положением, создаваемым выпуклым сенсорным модулем 12.
Как показано на фигуре 3В, большой палец 291 касается участка 31 на вершине плоскости 20, тогда как указательный палец 292 касается участка 32 на вершине плоскости 20. Средний палец 293 касается участка 33 на вершине плоскости 20, и часть руки 294 между большим пальцем и указательным пальцем находится в контакте с участком 34 на вершине плоскости 20. Сенсорный модуль 12 с дугообразной поверхностью обнаруживает и вводит двумерные данные положения 311, двумерные данные положения 321, двумерные данные положения 331 и двумерные данные положения 341. На фигуре 3В координата Y соответствующих двумерных положений 311-331 находится ближе к двумерному положению 341 и под этим положением.
В другом варианте воплощения изобретения, если датчик, в частности датчик восприятия гравитации устройства ввода 1 карандашного типа, обнаруживает, что пользователь удерживает противоположный конец устройства ввода 1 карандашного типа, модуль идентификации машинной команды может выдать команду на удержание устройства ввода 1 карандашного типа в противоположном направлении удержания. Если устройство ввода 1 карандашного типа удерживается в противоположном направлении, это устройство ввода становится ластиком, и пользователь может перемещать устройство ввода 1 по тексту, чтобы стирать знаки.
На фигуре 3С модуль идентификации машинной команды также определяет, держит ли пользователь задний конец устройства ввода 1 карандашного типа или устройство ввода 1 в соответствии с двумерным положением, созданным выпуклым управляющим сенсорным модулем 12. Если пользователь держит передний конец устройства ввода 1 карандашного типа, может быть использован другой датчик, например гироскоп или датчик направления для обнаружения направления движения острого конца карандаша устройства ввода 1. Точно так же модуль идентификации машинной команды формирует машинную команду для перемещения курсора и, таким образом, пользователь может удерживать передний конец устройства ввода 1 карандашного типа для управления курсором на экране электронного устройства 19.
Если пользователь держит задний конец устройства ввода 1 карандашного типа, то модуль идентификации машинной команды может использоваться для идентификации предопределенного движения пользователя по физической величине, обнаруженной другим датчиком, чтобы сформировать соответствующую операционную команду, как показано на фигуре 2С. Если пользователь держит задний конец устройства ввода 1 карандашного типа, это он выполняет рабочее движение со смещением дуги вдоль направления D1 на задний конец. Модуль идентификации машинной команды сначала становится больше и затем меньше постоянной физической величины, обнаруженной датчиком, например в виде ускорения, обнаруженного датчиком ускорения. Датчик направления может обнаружить смещение устройства ввода 1 карандашного типа, которое движется из верхнего правого положения в нижнее левое положение, и модуль идентификации машинной команды может определить, делает ли пользователь дугообразное движение по направлению к левой стороне, чтобы сформировать соответствующую операционную команду. Например, рисунок дуги к левой стороне выдает машинную команду для листинга к следующей странице, и протягивание дуги к правой стороне дает команду для листинга к предыдущей странице.
Вышеупомянутая команда, если она требуется, может включать команду корректировки громкости звука, команду корректировки параметров экрана (таких как яркость, контраст или размер отображенной области), команду воспроизведения мультимедиа или команду просмотра документа. Рабочее движение, если требуется, может включать движение захвата пера, движение вращения пера и т.д. Любое рабочее движение, определенное путем анализа сигнала сенсорного модуля или датчика, охватывается соответствующим пунктом патентной формулы настоящего изобретения.
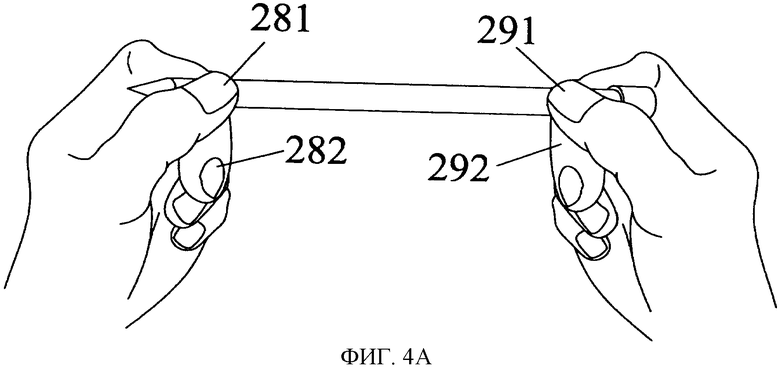
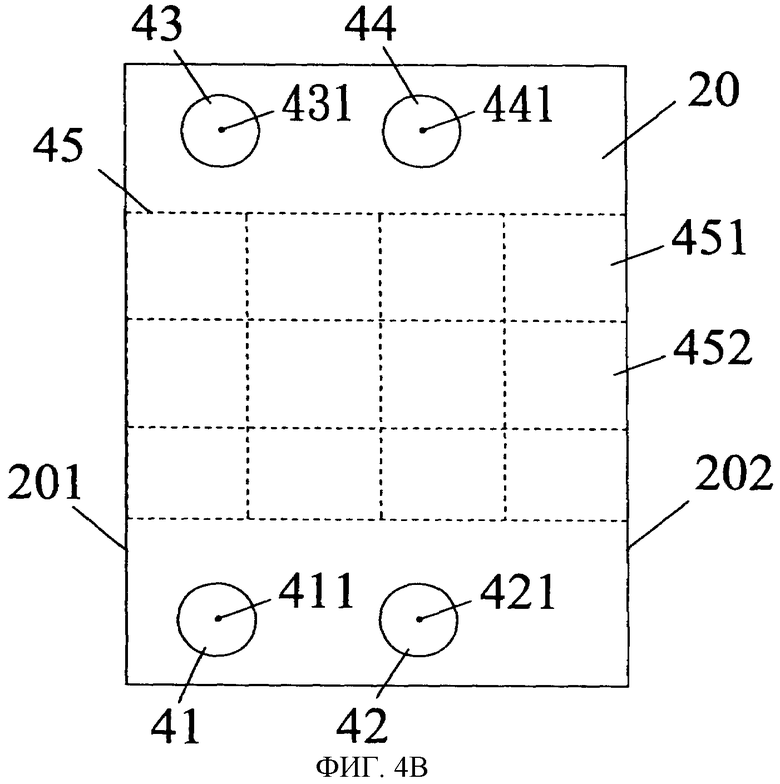
Фигуры 4А-4В представляют альтернативный тип удержания в режиме ввода устройства ввода в соответствии с еще одним вариантом воплощения изобретения. На Фигуре 4В показано получение двумерных данных положения сенсорного модуля 12 с дугообразной поверхностью, когда руки пользователя держат оба конца устройства ввода 1. Большой палец 281 и указательный палец 282 левой руки держат передний конец устройства ввода 1, а большой палец 291 и указательный палец 292 правой руки держат задний конец устройства ввода 1. Области касания 43 и 44 находятся на вершине плоскости 20. На фигуре 4В сенсорный модуль 12 с дугообразной поверхностью позволяет пользователю вводить двумерные данные положения 411, двумерные данные положения 421, двумерные данные положения 431 и двумерные данные положения 441. Поскольку комбинация двумерных положений включает две различные группы двумерных положений, координаты Y этих групп представляют собой минимальные и максимальные значения, которые значительно отличаются от комбинации двумерных данных положения, показанных на фигурах 2В-2Е и 3В.
Управляющий модуль 13 может различить тип удержания устройства ввода 1 на основе ввода двумерных данных положения 121 от сенсорного модуля с дугообразной поверхностью. Когда управляющий модуль 13 может различить тип удержания устройства ввода 1 на основе двумерных данных положения 121, устройство ввода 1 переключается в соответствующий режим ввода. Управляющий модуль 13 затем формирует управляющий сигнал, на основе двумерных данных положения 121, полученных от сенсорного модуля с дугообразной поверхностью.
После идентификации удержания в вертикальном положении, как показано на фигуре 2А, управляющий модуль 13 переключает устройство ввода 1 в режим просмотра. Когда указательный палец 292 дважды касается области касания 22, сенсорный модуль 12 с дугообразной поверхностью вводов выдает два последовательных ряда двумерных данных положения 221 в управляющий модуль 13. Управляющий модуль 13 обнаруживает два касания на участке 22 и формирует управляющий сигнал для команды "следующая страница" при условии, что управляющий модуль 13 получает два последовательных набора двумерных данных положения 251. Когда пользователь изгибает указательный палец 292 и дважды касается участка 25, формируется управляющий сигнал для команды "предыдущая страница".
Аналогичным образом, после идентификации устройства ввода 1, которое удерживается в обратном положении, как показано на фигуре 3А, управляющий модуль 13 переключает устройство ввода 1 в мультимедийный вещательный режим. Когда управляющий модуль 13 получает два последних последовательных набора двумерных данных положения 321, он обнаруживает, что пользователь изгибает указательный палец 292, чтобы дважды коснуться участка 32, и формирует управляющий сигнал для команды "вещание". Если управляющий модуль 13 получает два последовательных набора двумерных данных положения 351, он обнаруживает, что пользователь согнул указательный палец 292, чтобы дважды коснуться участка 35, и формирует управляющий сигнал для команды "пауза". Если управляющий модуль 13 получает двумерные данные положения для движения от участка 32 к участку 35, он различает, что пользователь перемещает его/ее указательный палец 292 от участка 32 к участку 35, и формирует управляющий сигнал для команды "быстро вперед". Напротив, если управляющий модуль 13 различает, что пользователь перемещает его/ее указательный палец 292 от участка 35 к участку 32, он формирует управляющий сигнал для команды "быстрый назад".
В другом варианте воплощения изобретения, после идентификации устройства ввода 1, которое удерживается двумя руками, как показано на фигуре 4А, управляющий модуль 13 переключает устройство ввода 1 в режим ввода с клавиатуры. Когда управляющий модуль 13 получает двумерные данные положения с участка 45, он формирует управляющий сигнал для команды "входной знак", таким образом, изменяя входные знаки, на основе касания этого участка. Участок 45 является цифровой клавиатурой, с которой область 451 может получать вводимые цифры 3, в то время как область 452 может получить вводимые цифры 2.
Следует отметить, что тип удержания описанного выше устройства ввода относится ко всем указанным вариантам, любым способам, которые могут различить тип удержания устройства ввода через двумерные данные положения 121 и входят в объем настоящего изобретения.
На фигуре 5А показана принципиальная схема устройства ввода, которое может выполнять многорежимные переключательные функции в соответствии с другим вариантом настоящего изобретения. Устройство ввода 5 включает корпус 11, сенсорный модуль 12 с дугообразной поверхностью и управляющий модуль 53. В этом варианте воплощения изобретения корпус 11 является трубчатым объектом с цилиндрической поверхностью. Альтернативно, корпус 11 может быть цилиндром, конусом, сферой или любым геометрическим объектом с дугообразной поверхностью. Сенсорный модуль 12 с дугообразной поверхностью расположен на или внутри корпуса 11 и служит для обнаружения и/или ввода двумерных данных положения 121. Сенсорный модуль 12 с дугообразной поверхностью предпочтительно представляет собой гибкую сенсорную панель. Управляющий модуль 53 служит для преобразования двумерных данных положения 121 в трехмерные данные положения 531, после чего он переключает устройство ввода 5 в режим ввода трехмерных данных положения 531.
Фигуры 5В-5С представляют схемы двумерных и трехмерных координат сенсорного модуля с дугообразной поверхностью в соответствии с одним вариантом воплощения настоящего изобретения. Схема преобразует координату оси X в координату X'-Z', как показано на фигуре 5В. Сенсорный модуль 12 с дугообразной поверхностью, в одном примере, не подключен снизу, как показано на фигуре 5В. Альтернативно, когда сенсорный модуль 12 с дугообразной поверхностью расположен на поверхности корпуса 11, оба края соединяются чтобы сформировать цилиндрический объект.
В соответствии с геометрическими особенностями цилиндра координата оси Y этих трех размерностей параллельна координате оси Y этих двух размерностей так, как эта ось Y показана на фигуре 2В. Координата оси X' и координата оси Z' получены из преобразования координаты оси X двух размерностей сенсорного модуля 12 с дугообразной поверхностью так, как эта ось X показана на фигуре 2В. На фигуре 5С сенсорный модуль 12 с дугообразной поверхностью полностью охватывает корпус 11 (формируется цилиндр). Координата оси X сенсорного модуля с дугообразной поверхностью 12 разделена на четверти, которые соответствуют нулю градусов, девяноста градусам, ста восьмидесяти градусам и двухстам семидесяти градусам соответственно.
Если максимальная координата X сенсорного модуля с дугообразной поверхностью 12 равна 512 пикселям, радиус корпуса, например, 256 разделен на n (n - отношение окружности круга к его диаметру), позиция нулевого пикселя X координат преобразуется в позицию 571 координаты X'-Z', позиция ста двадцати восьмого пикселя X координат преобразуется в позицию 572 координаты X'-Z', позиция двести пятьдесят шестого пикселя X координат преобразуется в позицию 573 координаты X'-Z', позиция триста восемьдесят четвертого пикселя координаты X преобразуется в позицию 574 координаты X'-Z'.
Если пиксель сенсорного модуля с дугообразной поверхностью распределен линейно, угловое положение координаты X'-Z' может быть вычислено на основании X координат, например, эта координата X положения 59 определяется сорока тремя пикселями, которые составляют расстояние одной трети положения 571 до положения 572, таким образом, угол 592 положения 59 составляет тридцать градусов (90/3=30), так что координата X' положения 59 составляет r×cos30° и координата Z' составляет r×sin30°. Кроме того, если эта координата X положения 58 равна ста девяноста двум пикселям, то угол 582 положения 58 равен ста тридцати пяти градусам (192/256=3/4, 180×3/4=135), так что координата X' положения 58 составляет r×cos135° и координата Z' составляет r×sin135°. По объяснениям выше, анализируя геометрические особенности корпуса, окруженного сенсорным модулем с дугообразной поверхностью 12, двумерные координаты могут быть преобразованы в трехмерные координаты.
Преобразовывая двумерные координаты в трехмерные координаты, можно сформировать больше сообщений для того, чтобы определить тип удержания устройства ввода 11. Например, положение 294 ближе к части руки между большим пальцем и указательным пальцем. Таким образом, положение 294 в нисходящей части устройства ввода 5, т.е. координата Z' имеет отрицательное значение. Ось Y' является параллельным устройством ввода, как показано на фигуре 6А. Однако пользователь при работе часто пренебрегает осевым направлением устройства ввода. Чтобы увеличить оперативное удобство устройства ввода 5, управляющий модуль может использоваться для корректировки осевого направления в области касания пользователем.
В случае удержания устройства ввода в вертикальном положении управляющий модуль 53 преобразует двумерные координаты в трехмерные координаты положений 291-294 и использует трехмерные координаты для определения положения вертикального удержания. Принцип такого определения аналогичен принципу использования двумерных данных положения. Соответственно мы опускаем подробности этого процесса. Управляющий модуль 53 зависит от характеристики положения 294, расположенной на нисходящей стороне устройства ввода 1 и использует трехмерные координаты положении 294 для корректировки параметров, используемых при преобразовании в описанном выше процессе обработки. Последующее преобразование трехмерных координат подтверждает состояние удержания устройства ввода 1.
После этого управляющий модуль 53 формирует управляющий сигнал на основе трехмерных данных положения 531 и переключает режимы ввода. Направление движения при касании может быть идентифицировано, преобразованием двумерных данных положения в трехмерные данные положения. На фигурах 6А-6В показана схема работы устройства ввода в соответствии с еще одним вариантом воплощения настоящего изобретения. После трехмерного преобразования осуществляется движение из положения 60 в положение 61 и из положения 62 в положение 63. Поскольку в обоих случаях происходит движение вверх, управляющий модуль 53 может формировать соответствующие управляющие сигналы. Если не было никакого преобразования через трехмерные координаты, движение из положения 60 в положение 61 и из положения 62 в положение 63 может быть активизировано. Поскольку оба движения происходят в разных направлениях, управляющий модуль 53 может сформировать ошибочные управляющие сигналы.
Фигуры 7А-7С представляют схемы устройства ввода 7 карандашного типа, схему его работы и вид спереди на устройства ввода карандашного типа по направлению D3 в соответствии с одним вариантом воплощения настоящего изобретения. Устройство ввода 7 карандашного типа включает столбчатый корпус 71, множество сенсорных модулей 72 и модуль передачи сигнала 73. Столбчатый корпус 71 имеет множество внешних поверхностей и множество сенсорных модулей 72, установленных на каждой внешней поверхности столбчатого корпуса, соответственно. В этом варианте воплощения изобретения столбчатый корпус 71, как показано на фигуре 7А, является шестиугольным карандашом с шестью внешними поверхностями, и сенсорные модули 72 установлены на шести внешних поверхностях шестиугольного карандаша, соответственно, как показано на фигуре 7С. Отметим, что шестиугольный карандаш используется только для иллюстрации конкретного примера воплощения настоящего изобретения, и не ограничивает объем изобретения такой формой. Любое устройство ввода карандашного типа, имеющее множество сенсорных модулей, установленных на множестве различных плоскостей корпуса, таких как четырехгранный карандаш или треугольный карандаш, охвачено настоящим изобретением.
Сенсорные модули 72 служат для ввода двумерных данных, и эти двумерные данные вводятся в двумерные данные той же самой плоскости, и сигнал, основанный на интегрированных двумерных данных, передается на электронное устройство через модуль передачи сигнала 73. Поскольку двумерные данные различных сенсорных модулей 72 интегрированы, процедура обработки данных аналогична работе устройства ввода карандашного типа, показанного на фигуре 1А.
Если потребуется, устройство ввода 7 карандашного типа может дополнительно включать датчик для обнаружения физической величины устройства ввода 7 карандашного типа, причем датчик предпочтительно включает датчик ускорения, датчик восприятия гравитации, гироскоп или цифровой компас для обнаружения ускорения, угла наклона, угла вращения или направления плоскости устройства ввода 7 карандашного типа. Сигнал, основанный на двумерных данных или физическом объеме, обнаруженном датчиком, используется для формирования операционной команды через модуль идентификации команд, чтобы обеспечить пользователей различными способами выполнения операций. Модули идентификации команд могут быть установлены на столбчатом корпусе 71 или на электронном устройстве. Вышеуказанный модуль передачи сигнала 73 является беспроводным модулем передачи сигнала, таким как модуль передачи по технологии беспроводной ближней радиосвязи (Bluetooth), радиочастотный модуль, инфракрасный модуль или кабельный модуль передачи сигнала типа USB или модуль IEEE1394.
Кроме того, устройство ввода карандашного типа по настоящему изобретению при необходимости может быть снабжено триггерным элементом, таким как нажимная клавиша, или фотоэлементом прерывания, обеспечивающим подачу более точного сигнала на модуль идентификации команд. Если сенсорный модуль не получит введенные данные в течение определенного времени, датчик будет переключен в неактивное состояние для сохранения энергии.
Хотя здесь показаны и описаны конкретные варианты воплощения настоящего изобретения, для специалистов в данной области очевидно, что могут быть сделаны различные изменения и модификации, не выходящие за объем формулы этого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ И ПРОГРАММА | 2009 |
|
RU2533646C2 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧАЕМЫМ ТРЕХМЕРНЫМ ПОЛЬЗОВАТЕЛЬСКИМ ИНТЕРФЕЙСОМ И ИСПОЛЬЗУЮЩИЙ ЕГО МОБИЛЬНЫЙ ТЕРМИНАЛ | 2009 |
|
RU2419831C2 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ С ПОМОЩЬЮ ЖЕСТОВ И 3D-СЕНСОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2455676C2 |
| СИСТЕМА ОСВЕТИТЕЛЬНЫХ УСТРОЙСТВ, ИМЕЮЩАЯ БЛОК СЕНСОРНОГО ВВОДА ДАННЫХ ДЛЯ УПРАВЛЕНИЯ УГЛОМ ВЫВОДА СВЕТА | 2014 |
|
RU2657236C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ УПРАВЛЯЕМЫМ ТРАНСПОРТНЫМ УСТРОЙСТВОМ ДЛЯ СОБРАННОГО УРОЖАЯ | 2014 |
|
RU2649142C2 |
| СПОСОБ И СИСТЕМА РЕНДЕРИНГА 3D МОДЕЛЕЙ В БРАУЗЕРЕ С ИСПОЛЬЗОВАНИЕМ РАСПРЕДЕЛЕННЫХ РЕСУРСОВ | 2020 |
|
RU2736628C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ТРЕХМЕРНЫХ ДАТЧИКОВ | 2016 |
|
RU2658092C2 |
| АНТЕННАЯ СИСТЕМА ДЛЯ ТЕЛЕМАТИЧЕСКОГО БЛОКА ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2769941C1 |
| АВТОМАТИЧЕСКОЕ РАСПОЛОЖЕНИЕ ЭЛЕМЕНТОВ ВДОЛЬ ВЛОЖЕННОГО ПУТИ ОДНОМЕРНОГО МНОГООБРАЗИЯ | 2006 |
|
RU2431198C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВВОДА ДАННЫХ В ШРИФТЕ БРАЙЛЯ | 2011 |
|
RU2589549C2 |
Изобретение относится к области устройств ввода данных в электронные устройства, а именно к устройству ввода с многорежимной переключательной функцией. Техническим результатом является повышение удобства и расширение возможностей управления пользователем электронным устройством. Для этого устройство ввода включает корпус, сенсорный модуль с дугообразной поверхностью и управляющий модуль. Сенсорный модуль с дугообразной поверхностью расположен на поверхности корпуса и используется для ввода двумерных данных положения. Управляющий модуль переключает режим ввода указанного устройства ввода на основе двумерных данных положения и формирует управляющий сигнал, основанный на режиме переключения ввода и двумерных данных положения. В другом варианте воплощения изобретения, после преобразования двумерных данных положения в трехмерные данные положения, на основе геометрических характеристик корпуса, управляющий модуль устройства ввода переключает режим ввода устройства, основанный на трехмерных данных положения, и формирует управляющий сигнал в соответствии с трехмерными данными положения. 4 н. и 16 з.п. ф-лы, 21 ил.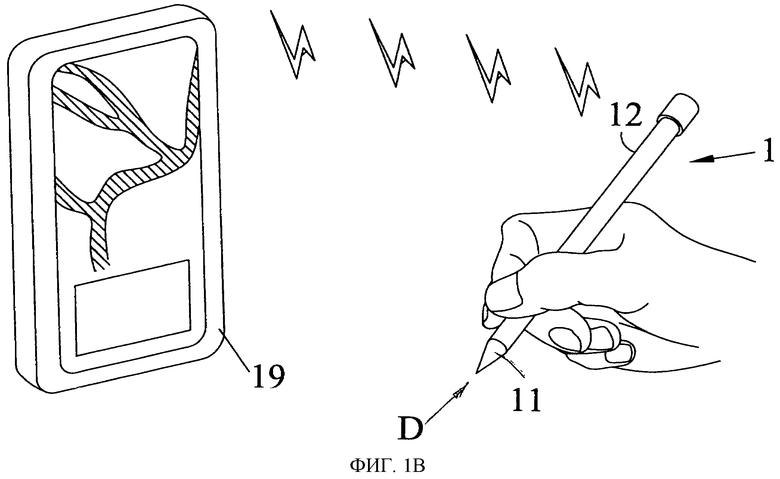
1. Устройство ввода с многорежимной переключательной функцией, содержащее
корпус;
сенсорный модуль с дугообразной поверхностью, расположенный на поверхности указанного корпуса и способный обнаруживать двумерные данные положения, по меньшей мере, через один контакт; и
управляющий модуль, соединенный с указанным корпусом и служащий для переключения устройства ввода в первый режим ввода, основанный на указанных двумерных данных положения, и для формирования управляющего сигнала, основанного на указанном первом режиме ввода и указанных двумерных данных положения.
2. Устройство ввода по п.1, в котором корпус имеет геометрическую форму цилиндрического стержня, цилиндра, конуса, сферы или круглого стержня.
3. Устройство ввода по п.1, в котором управляющий модуль определяет тип удержания устройства рукой пользователя на основе указанных двумерных данных положения и переключает устройство ввода на один из множества режимов ввода, соответствующих указанному типу удержания.
4. Устройство ввода по п.3, которое представляет собой трубчатое устройство ввода и в котором тип удержания дополнительно включает один из типов вертикального удержания, обратного удержания, вертикального захвата, обратного захвата, захвата двумя руками и удержания кистью.
5. Устройство ввода по п.1, в котором управляющий модуль переключает указанный первый режим ввода устройства ввода, основанного на относительных отношениях двумерных данных положения.
6. Устройство ввода с многорежимной переключательной функцией, содержащее
корпус;
сенсорный модуль с дугообразной поверхностью, расположенный на поверхности указанного корпуса и служащий для ввода двумерных данных положения; и
управляющий модуль, соединенный с указанным корпусом и служащий для преобразования указанных двумерных данных положения в трехмерные данные положения на основе геометрических характеристик указанного корпуса и для переключения режима ввода указанного устройства ввода на основе указанных трехмерных данных положения, в котором указанный управляющий модуль может формировать управляющий сигнал, основанный на указанном режиме переключения ввода и на указанных трехмерных данных положения.
7. Устройство ввода по п.6, в котором корпус имеет геометрическую форму цилиндра, конуса, сферы или любых объектов с дугообразной поверхностью.
8. Устройство ввода по п.6, в котором управляющий модуль определяет тип удержания устройства рукой пользователя на основе указанных трехмерных данных положения и в котором управляющий модуль переключает устройство ввода в режим ввода в ответ на тип удержания.
9. Устройство ввода по п.8, которое представляет собой трубчатое устройство ввода и в котором тип удержания включает вертикальное удержание, обратное удержание, вертикальный захват, обратный захват, захват двумя руками или захват кистью.
10. Устройство ввода по п.6, в котором управляющий модуль переключает режим ввода устройства ввода, основанный на относительных отношениях указанных трехмерных данных положения.
11. Устройство ввода карандашного типа для управления электронным устройством, содержащее
столбчатый корпус;
выпуклый сенсорный модуль, установленный на указанном столбчатом корпусе и служащий для ввода двумерных данных;
модуль передачи сигнала для передачи сигнала на основе указанных двумерных данных на указанное электронное устройство; и
датчик для обнаружения физической величины указанного устройства ввода карандашного типа.
12. Устройство ввода по п.11, дополнительно содержащее модуль идентификации машинной команды для формирования операционной команды, основанной на двумерных данных и на физической величине, и для передачи операционной команды указанному электронному устройству через модуль передачи сигнала.
13. Устройство ввода по п.12, в котором модуль идентификации машинной команды идентифицирует рабочее движение пользователя в соответствии с двумерными данными и физической величиной и формирует операционную команду, соответствующую рабочему движению.
14. Устройство ввода по п.12, в котором датчик выбран из группы датчиков, включающих датчик ускорения, гравитационный датчик, гироскоп и датчик направления.
15. Электронная система ввода данных, имеющая переносное устройство ввода данных, содержащая
систему, способную обрабатывать информацию; и
устройство дистанционного ввода данных, соединенное с указанной системой и способное формировать команды в системе в соответствии с командами пользователя, передаваемыми через сеть беспроводной связи, в котором устройство дистанционного ввода данных может декодировать указанные команды пользователя, обнаруживая двумерные точки контакта между рукой пользователя и поверхностью устройства дистанционного ввода данных.
16. Система по п.15, которая представляет собой одно из устройств в виде персонального цифрового секретаря ("PDA"), сотового телефона и смартфона.
17. Система по п.15, в которой устройство дистанционного ввода данных представляет собой перо с сенсорной поверхностью.
18. Система по п.17, в которой перо и сенсорная поверхность представляют собой два независимых элемента.
19. Система по п.17, в которой перо и сенсорная поверхность созданы на одной структуре.
20. Система по п.15, в которой устройство дистанционного ввода данных включает, по меньшей мере, одно из следующих устройств: датчик ускорения, гравитационный датчик, гироскоп и цифровой компас.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСМОТРА ИНФОРМАЦИИ НА ДИСПЛЕЕ | 2002 |
|
RU2288512C2 |
| СПОСОБ ЛЕЧЕНИЯ И/ИЛИ ПРОФИЛАКТИКИ ИЗБЫТОЧНОЙ МАССЫ ТЕЛА, И/ИЛИ ОЖИРЕНИЯ, И/ИЛИ МЕТАБОЛИЧЕСКИХ НАРУШЕНИЙ | 2008 |
|
RU2403038C2 |
| Гидравлический способ добычи торфа | 1916 |
|
SU206A1 |
| US 6417846 B1, 09.07.2002 | |||
| JP 2005128826 A, 19.05.2005 | |||
| ТРЕХМЕРНЫЙ МИКРОДЖОЙСТИК | 2005 |
|
RU2301439C1 |

