Изобретение относится к устройствам управления объектами, в частности к устройствам управления объектами, отображаемыми на дисплее компьютера, используемыми в мобильных телефонных аппаратах, компьютерах, бытовых и технологических устройствах, игрушках. Изобретение может быть использовано для ввода, обработки и вывода данных путем управления объектами любых устройств визуального отображения текстовой и графической информации, а также для управления роботизированными объектами, летательными и подводными аппаратами, управления объектами в компьютерных симуляторах и при трехмерном проектировании.
В настоящее время существует множество устройств обработки и управления информацией (US 4546347, 08.10.1985, US 4751380, 14.06.1988, JP 54-126426, 01.10.1979, EP 0081348 A2, 15.06.1983, EP 0146843 A2, 03.07.1985 и пр.), принцип работы которых основан на том, что курсор устройства, отображаемый на дисплее, связывают электронным способом с механическим сенсором (в простейшем случае шариком, снабженным системой датчиков), а затем перемещают рукой это устройство относительно анализируемой неподвижной поверхности. Существуют и такие изотонические устройства, как трекболы, трекпойнты, тачпады и пр.
Эти устройства позволяют управлять объектами на плоскости, т.е. управление объектами осуществляется за счет обрабатываемых сигналов только по двум координатам (например, Х и Y).
Одним из существенных недостатков этих устройств является невозможность одновременного управления по третьей координате (например, Z), т.е. невозможность полноценного управления объектами в пространстве.
Наиболее близким к заявляемому изобретению (прототипом) является устройство, описанное в заявке WO 01/35328 А1, 17.05.2001. В этом устройстве используются плоские упругие элементы, содержащие радиально расположенные балки с размещенными на них датчиками, чувствительными к деформации. В центре упругого элемента размещена полусфера, действуя на которую пальцем руки, осуществляют целенаправленную деформацию упругих элементов, фиксируют эти деформации с помощью датчиков, чувствительных к деформации, и используют сигналы этих датчиков для управления объектом.
Одним из недостатков прототипа является относительная сложность конструктивного исполнения, так как он содержит достаточно много деталей, что затрудняет его изготовление средствами массового автоматизированного производства. Другим недостатком являются довольно значительные габариты управляющей полусферы, что создает определенное неудобство оператору при работе с устройством.
Техническим результатом заявляемого изобретения является создание простого и, вместе с тем, полноценного трехмерного микроджойстика, позволяющего:
- либо управлять перемещением объекта в пространстве путем обработки сигналов, поступающих по трем каналам, соответствующих значениям координат X, Y и Z, и одновременно вырабатывать сигнал на осуществление вращения объектом в одной плоскости, перпендикулярной оси OZ;
- либо вырабатывать сигнал управления в соответствии со значением координаты Z и одновременно управлять вращением объекта в трех взаимно перпендикулярных плоскостях.
Предложен трехмерный микроджойстик, содержащий корпус с управляющей рукояткой, которая соединена с упругим элементом, на поверхности которого расположены тензорезисторы, соединенные с микропроцессором с помощью шин и средств передачи данных.
Основные отличия заявляемого объекта заключаются в следующем:
- упругий элемент трехмерного микроджойстика выполнен в форме полого конуса или осесимметричного полого предмета, сужающегося кверху (например, пирамиды и пр.). Конусовидная форма упругого элемента способствует свободному разложению вектора силы, приложенной к управляющей рукоятке трехмерного микроджойстика, на три проекции на координатные оси X, Y и Z за счет размещения тензорезисторов на внешней и внутренней поверхностях конуса таким образом, что они регистрируют комбинации его деформаций в трех плоскостях при различной нагрузке. Логический анализ комбинаций деформаций, зарегистрированных системой тензорезисторов, позволяет делать однозначные выводы о виде приложенной нагрузки (вращающий момент или линейное силовое воздействие) и его направлении;
- упругий элемент выполнен с вырезами на его боковой поверхности или без них. Вырезы на боковой поверхности упругого элемента позволяют увеличивать чувствительность трехмерного микроджойстика за счет того, что прилагаемая нагрузка распределяется на меньший объем материала упругого элемента. За счет этого деформации упругого элемента увеличиваются, что повышает чувствительность трехмерного микроджойстика;
- тензорезисторы на упругом элементе расположены радиально от центра;
- тензорезисторы на упругом элементе расположены на его внутренней и внешней поверхностях радиально от центра с углом тангенциального наклона относительно линии внешней окружности упругого элемента, причем, если угол тангенциального наклона тензорезисторов, расположенных на внутренней поверхности упругого элемента, отсчитывается по часовой стрелке от линии окружности (при виде на упругий элемент сверху), то угол тангенциального наклона тензорезисторов, расположенных на его внешней поверхности, должен отсчитываться против часовой стрелки или наоборот, если угол тангенциального наклона тензорезисторов, расположенных на внутренней поверхности упругого элемента, отсчитывается против часовой стрелки, то угол тангенциального наклона тензорезисторов, расположенных на его внешней поверхности, должен отсчитываться по часовой стрелке, при этом между осями тензорезисторов, расположенных на внутренней и внешней поверхностях упругого элемента, должен образовываться определенный угол.
Предлагаемый трехмерный микроджойстик позволяет управлять перемещением объектов в пространстве, а также управлять вращением объектов в трех взаимно перпендикулярных плоскостях посредством команд от микропроцессора, вырабатываемых за счет поступающих от аналого-цифрового преобразователя цифровых сигналов, которые, в свою очередь, генерируются после обработки аналоговых сигналов деформаций тензорезисторов, поступающих по трем каналам (соответственно значения координат X, Y и Z).
Для управления перемещением объекта прикладывают силовое воздействие к управляющей рукоятке трехмерного микроджойстика путем нажатия пальцами руки в направлении требуемого перемещения объекта и прекращают силовое воздействие при необходимости его остановки. При этом находящиеся в паре тензорезисторы (размещенные друг над другом соответственно внутри и снаружи корпуса упругого элемента) реагируют на прикладываемое усилие одинаково: происходит их одновременное сжатие либо растяжение, либо, при определенных условиях, деформации не происходит вообще. Конусовидная форма упругого элемента обеспечивает чувствительность расположенных на нем тензорезисторов для выработки при деформировании сигналов не только по координатам Х и Y, но и по координате Z, т.е. заявляемый микроджойстик позволяет разлагать вектор силы, приложенной к управляющей рукоятке, учитывая его координаты в пространстве. В таблице 1 приведены состояния тензорезисторов при различных воздействиях на управляющую рукоятку трехмерного микроджойстика при перемещении объекта управления.
Для обеспечения чувствительности микроджойстика к вращению, т.е. для осуществления возможности не только перемещения, но и вращения объекта управления, на упругом элементе тензорезисторы размещены с углом тангенциального наклона βi ( , где n - количество тензорезисторов) относительно линии внешней окружности упругого элемента. Для осуществления вращения объекта прикладывают вращающий момент в нужном направлении и прекращают приложение вращающего момента при необходимости остановки объекта. При этом находящиеся в паре тензорезисторы (размещенные друг над другом соответственно внутри и снаружи корпуса упругого элемента) реагируют на прикладываемое усилие неодинаково: происходит сжатие одного и растяжение другого в зависимости от направления приложения вращающего момента. В отличие от случая управления перемещением объекта, где некоторые тензорезисторы могут не деформироваться вообще, в случае вращения объекта происходит деформация всех тензорезисторов. В таблице 2 приведены состояния тензорезисторов при приложении к управляющей рукоятке трехмерного микроджойстика крутящего момента при вращении объекта управления.
, где n - количество тензорезисторов) относительно линии внешней окружности упругого элемента. Для осуществления вращения объекта прикладывают вращающий момент в нужном направлении и прекращают приложение вращающего момента при необходимости остановки объекта. При этом находящиеся в паре тензорезисторы (размещенные друг над другом соответственно внутри и снаружи корпуса упругого элемента) реагируют на прикладываемое усилие неодинаково: происходит сжатие одного и растяжение другого в зависимости от направления приложения вращающего момента. В отличие от случая управления перемещением объекта, где некоторые тензорезисторы могут не деформироваться вообще, в случае вращения объекта происходит деформация всех тензорезисторов. В таблице 2 приведены состояния тензорезисторов при приложении к управляющей рукоятке трехмерного микроджойстика крутящего момента при вращении объекта управления.
Скорость и направление вращения объекта изменяют, соответственно, путем изменения величины и направления вращающего момента, приложенного к управляющей рукоятке трехмерного микроджойстика.
При этом направление и скорость вращения объекта в пространстве определяют по знакам и величинам тангенциальной составляющей электрических сигналов тензорезисторов, для чего микропроцессор анализирует знаки электрических сигналов всех тензорезисторов, и если они все одинаковы, вычисляет скорость вращения объекта. Скорость вращения объекта будет определяться по формуле

где:
Wob - скорость вращения объекта. При Wob>0 направление вращения соответствует вращению в заранее определенную сторону, например по углу тангенциального наклона тензорезисторов или по часовой стрелке, а при Wob<0 направление вращения противоположно предыдущему направлению вращения;
 - порядковый номер тензорезистора;
- порядковый номер тензорезистора;
n - количество тензорезисторов;
Kw - масштабный коэффициент;
F(Wi) - задаваемая функциональная зависимость скорости вращения от тангенциальной деформации тензорезисторов;
Wi - тангенциальный сигнал i-го тензорезистора.
Тангенциальный сигнал i-го тензорезистора будет определяться по формуле

где:
Ri - измеренный электрический сигнал i-го тензорезистора, при этом Ri=0 соответствует отсутствию управляющего сигнала, Ri>0 - сжатию, a Ri<0 - растяжению или наоборот;
Ft(βi) - тригонометрическая функция, например sin или cos, в зависимости от конструктивного исполнения трехмерного микроджойстика;
βi - угол тангенциального наклона i-го тензорезистора относительно линии внешней окружности упругого элемента.
Для определения направления и скорости перемещения объекта, вначале разлагают силу, приложенную пальцами руки к управляющей рукоятке, на составляющие компонентные вектора с заранее известными фиксированными направлениями, затем измеряют величины компонентных векторов разложения силы путем измерения электрических сигналов с тензорезисторов, установленных в этих направлениях, после чего вычисляют углы между проекциями вектора силы, приложенной к управляющей рукоятке, и осями координат трехмерного микроджойстика по формуле

где:
αj - вычисляемый угол направления силы, приложенной к управляющей рукоятке;
 - порядковый номер оси координат трехмерного микроджойстика, например X1, X2, Х3 соответственно оси X, Y и Z;
- порядковый номер оси координат трехмерного микроджойстика, например X1, X2, Х3 соответственно оси X, Y и Z;
m - количество осей координат;
 - сумма проекций векторов разложения силы, приложенной к управляющей рукоятке на j-ю ось координат;
- сумма проекций векторов разложения силы, приложенной к управляющей рукоятке на j-ю ось координат;
Uij - величина проекции i-го вектора разложения силы, приложенной к управляющей рукоятке трехмерного микроджойстика, на j-ю ось координат.
Угол тангенциального наклона i-го тензорезистора относительно линии внешней окружности упругого элемента будет определяться по формуле

где:
Ri - измеренный электрический сигнал i-го тензорезистора;
Ftj(bij) - тригонометрическая функция, например sin или cos, в зависимости от конструктивного исполнения трехмерного микроджойстика;
bij - известный угол между одной из осей координат трехмерного микроджойстика и i-м тензорезистором.
Приращения перемещения объекта будут вычисляться путем сложения векторов

где:
Кj - согласующие масштабные коэффициенты;
Uob - скорость перемещения объекта;
Ftj(αij) - тригонометрическая функция, например sin или cos, в зависимости от конструктивного исполнения трехмерного микроджойстика;
bij - известный угол между одной из осей координат трехмерного микроджойстика и i-м тензорезистором.
Скорость перемещения объекта будет определяться по формуле

Направления длинных осей симметрии тензорезисторов совмещают с осями координат трехмерного микроджойстика, а приращения перемещений объекта будут вычисляться по формуле

Сумму проекций векторов разложения силы на оси координат Uj вычисляют, суммируя только отрицательные или только положительные величины проекций каждого вектора.
Направление и скорость вращения объекта вокруг осей координат определяют по знакам и величинам Uj - сумм проекций векторов разложения силы на соответствующую ось координат.
Описание предлагаемого трехмерного микроджойстика поясняется фигурами 1-7:
- на фигуре 1 показан общий вид трехмерного микроджойстика;
- на фигуре 2 показано устройство упругого элемента и размещение тензорезисторов;
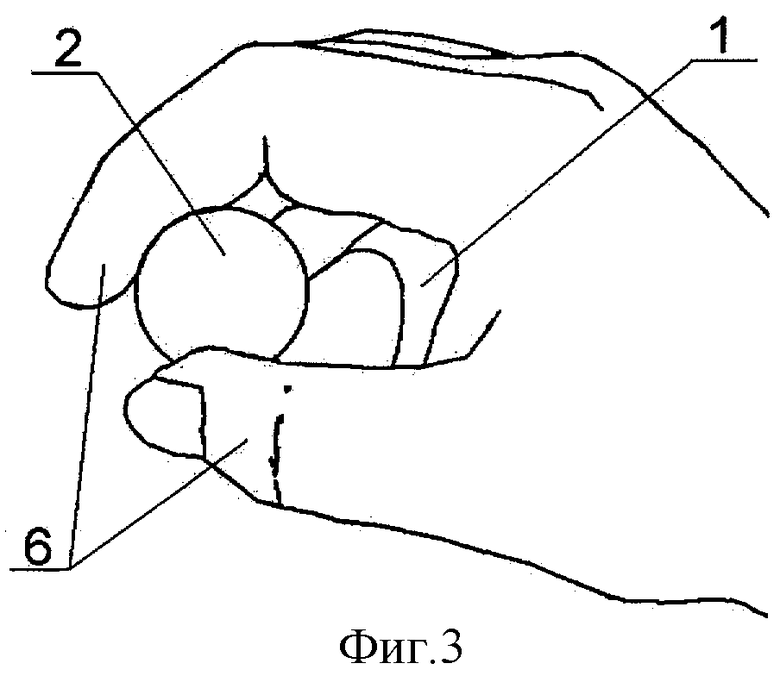
- на фигуре 3 показано положение руки оператора при работе с трехмерным микроджойстиком;
- на фигуре 4 показано деформирование тензорезисторов при приложении усилия параллельно плоскости размещения основания упругого элемента при перемещении объекта управления;
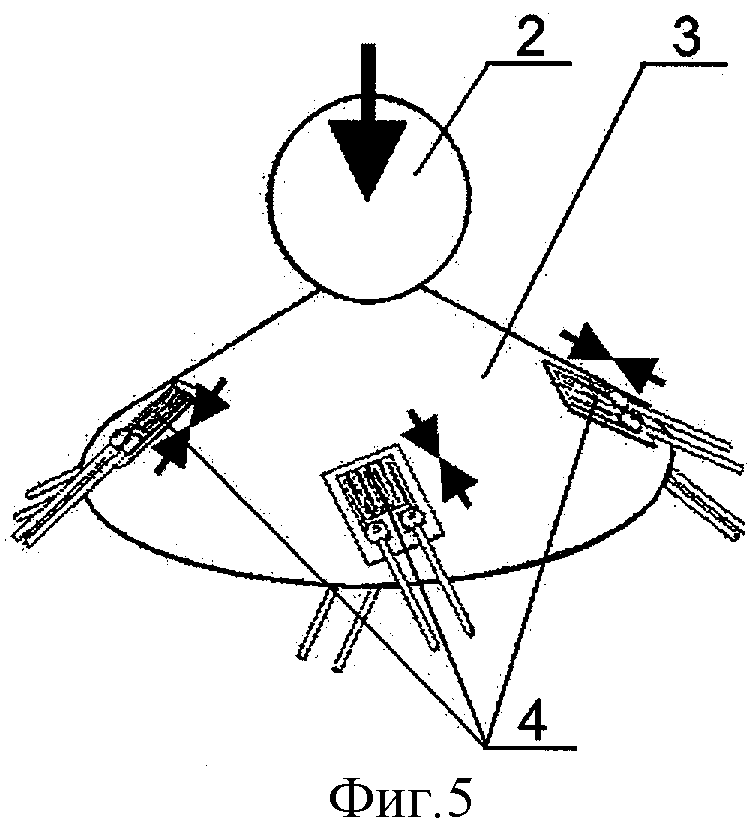
- на фигуре 5 показано деформирование тензорезисторов при приложении усилия перпендикулярно плоскости размещения основания упругого элемента при перемещении объекта управления;
- на фигуре 6 показано деформирование тензорезисторов при приложении крутящего момента по часовой стрелке при вращении объекта управления;
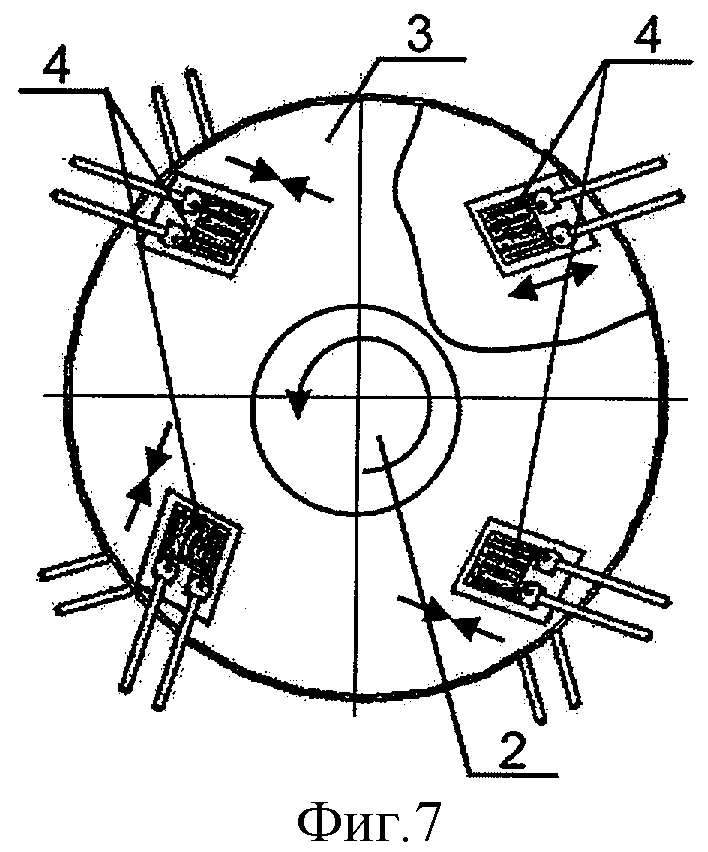
- на фигуре 7 показано деформирование тензорезисторов при приложении крутящего момента против часовой стрелки при вращении объекта управления.
На фигуре 1, на корпусе 1, выполненном в форме, удобной для расположения руки оператора, размещен упругий элемент 3 в форме конуса в защитном чехле 5. На вершине упругого элемента закреплена управляющая рукоятка 2.
На фигуре 2 упругий элемент 3 трехмерного микроджойстика выполнен из эластичного или пружинного материала, например из поликарбонатного пластика, силиконовой резины или пружинной стали, в виде полого конуса. Возможны любые модификации формы упругого элемента 3, например оснащение его вырезами на боковой поверхности или изменение формы конуса до любой формы осесимметричного полого предмета, сужающегося кверху. Упругий элемент 3 закрыт с внешней стороны защитным чехлом 5 из диэлектрического эластичного материала. На внутренней и внешней поверхностях упругого элемента 3 расположены тензорезисторы 4, соединенные с микропроцессором (на фигуре не показан) с помощью шин и средств передачи данных. Тензорезисторы 4 расположены радиально от центра с углом тангенциального наклона относительно линии внешней окружности упругого элемента 3. Наличие угла тангенциального наклона тензорезисторов 4 объясняется тем, что при расположении тензорезисторов строго радиально от центра будет происходить только генерирование управляющих сигналов по трем координатам, а направление вращения объекта в плоскости, перпендикулярной оси Z, определяться не будет. Закрепленная на вершине упругого элемента 3 управляющая рукоятка 2 выполнена в виде шара. Управляющая рукоятка 2 может быть выполнена в виде цилиндра или, в принципе, иметь любую форму, удобную для манипулирования ею пальцами.
Удобство в работе с трехмерным микроджойстиком (фиг.3) определяется, во-первых, тем, что он представляет собой легко умещающее в ладони изделие, а во-вторых, тем, что в процессе работы управляющая его рукоятка 2 обращена к манипулирующим пальцам 6 руки оператора, располагающейся поверх корпуса 1 трехмерного микроджойстика.
На фигуре 4 схематично показан процесс деформирования тензорезисторов 4 при приложении усилия параллельно плоскости размещения основания упругого элемента 3 при перемещении объекта управления. Например, при приложении усилия на управляющую рукоятку 2, направленного налево, тензорезисторы 4, расположенные по направлению приложения усилия, сжимаются, а тензорезисторы 4, расположенные против направления приложения усилия, растягиваются. Две другие пары тензорезисторов 4, расположенные перпендикулярно линии приложения усилия, при этом не деформируются, либо их деформациями можно пренебречь ввиду малости значений откликов.
На фигуре 5 схематично показан процесс деформирования тензорезисторов 4 при приложении усилия перпендикулярно плоскости размещения основания упругого элемента 3 при перемещении объекта управления. Например, при приложении усилия на управляющую рукоятку 2, направленного вниз, у всех тензорезисторов 4, как расположенных на внутренней, так и расположенных на внешней поверхностях упругого элемента 3, происходит сжатие.
На фигуре 6 схематично показан процесс деформирования тензорезисторов 4 при приложении крутящего момента по часовой стрелке при вращении объекта управления. Например, при приложении к управляющей рукоятке 2 крутящего момента, направленного по часовой стрелке, тензорезисторы 4, расположенные на внешней поверхности упругого элемента 3, растягиваются, а тензорезисторы 4, расположенные на его внутренней поверхности, сжимаются.
На фигуре 7 схематично показан процесс деформирования тензорезисторов 4 при приложении крутящего момента против часовой стрелки при вращении объекта управления. Например, при приложении к управляющей рукоятке 2 крутящего момента, направленного против часовой стрелки, тензорезисторы 4, расположенные на внешней поверхности упругого элемента 3, сжимаются, а тензорезисторы 4, расположенные на его внутренней поверхности, растягиваются.
Как при приложении крутящего момента по часовой стрелке, так и против, для того, чтобы управлять вращением объекта сразу в трех плоскостях, тензорезисторы 4 на упругом элементе 3 расположены на внутренней и внешней поверхностях радиально от центра с углом тангенциального наклона β относительно линии внешней окружности упругого элемента 3. При этом, если угол тангенциального наклона β1 тензорезисторов 4, расположенных на внутренней поверхности упругого элемента 3, отсчитывается по часовой стрелке от линии окружности (при виде на упругий элемент 3 сверху), то угол тангенциального наклона β2 тензорезисторов 4, расположенных на его внешней поверхности, должен отсчитываться против часовой стрелки. Или наоборот, если угол тангенциального наклона β1 тензорезисторов 4, расположенных на внутренней поверхности упругого элемента 3, отсчитывается против часовой стрелки, то угол тангенциального наклона β2 тензорезисторов 4, расположенных на его внешней поверхности, должен отсчитываться по часовой стрелке. При этом между осями пар тензорезисторов 4, расположенных на внутренней и внешней поверхностях упругого элемента 3, должен образовываться некоторый определенный угол γ.
Предлагаемый объект работает следующим образом. Удерживая трехмерный микроджойстик за корпус 1 в руке, нажимают пальцами руки 6 управляющую рукоятку 2 в нужном направлении. Усилие нажатия на управляющую рукоятку 2 передается на упругий элемент 3, что вызывает его деформацию. Деформация упругого элемента 3 фиксируется тензорезисторами 4. С помощью шин и средств передачи данных сигналы от тензорезисторов 4 передаются на микропроцессор (на фигурах не показан), который вычисляет угол приложения силы по формулам, заложенным в его памяти, определяет приращения и перемещает объект на требуемое расстояние либо производит его вращение.
Скорость перемещения объекта изменяют путем изменения величины приложенного усилия на управляющую рукоятку 2.
Скорость вращения управляемого объекта изменяют путем изменения величины вращающего момента.
Чем сильнее нажимать на управляющую рукоятку 2, тем быстрее будет двигаться объект. Чем больший вращающий момент приложить к управляющей рукоятке 2, тем с большей скоростью будет поворачиваться объект. Изменяют направление вращения управляемого объекта путем изменения направления вращающего момента, приложенного к управляющей рукоятке 2 трехмерного микроджойстика.
Таким образом, предлагаемое изобретение позволяет либо управлять перемещением объекта в пространстве путем обработки сигналов, поступающих по трем каналам, соответствующих значениям координат X, Y и Z и одновременно вырабатывать сигнал на осуществление вращения объектом в одной плоскости, перпендикулярной оси OZ, либо вырабатывать сигнал управления в соответствии со значением координаты Z и одновременно управлять вращением объекта в трех взаимно перпендикулярных плоскостях.
Как видно из описания, трехмерный микроджойстик по конструкции чрезвычайно прост. Все его элементы могут изготавливаться на автоматических линиях высокой производительности, например, методом литья под давлением из пластмасс. Конструкция трехмерного микроджойстика, в целом, при сборке не требует значительных трудозатрат. Это позволяет организовать массовое производство микроджойстиков, которые при минимальной себестоимости найдут широкое применение в электронике и электротехнике.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КУРСОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2275674C2 |
| СПОСОБ КОММУТАЦИИ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ И МНОГОФУНКЦИОНАЛЬНЫЙ ПЕРЕКЛЮЧАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2455678C1 |
| ОПТИЧЕСКИЙ МИНИСТИК | 2015 |
|
RU2594992C2 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ РЫБЫ | 2014 |
|
RU2582351C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| ЗУБОРЕЗНАЯ ФРЕЗА С РАДИАЛЬНО РЕГУЛИРУЕМЫМИ СТЕРЖНЕВЫМИ РЕЗЦАМИ КВАДРАТНОГО ИЛИ ПРЯМОУГОЛЬНОГО ПОПЕРЕЧНОГО СЕЧЕНИЯ | 2013 |
|
RU2660427C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СЛОЖНОГО НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ КОНСТРУКЦИИ, НАХОДЯЩЕЙСЯ ПОД СТАТИЧЕСКИМИ НАГРУЗКАМИ И ДИНАМИЧЕСКИМ НАГРУЖЕНИЕМ | 2011 |
|
RU2469261C1 |
| СПОСОБ ОБЪЕМНОГО ПРЕССОВАНИЯ БРИКЕТОВ ИЗ ПОРОШКООБРАЗНОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2014 |
|
RU2572268C1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |



Изобретение относится к устройствам управления объектами и может быть использовано в мобильных телефонах, компьютерных системах, в качестве миниатюрного средства управления роботизированными объектами, летательными и подводными аппаратами. Техническим результатом является создание простого, надежного трехмерного микроджойстика. Указанный результат достигается за счет того, что микроджойстик содержит тензорезисторы и упругий элемент в форме полого конуса с вырезами на его боковой поверхности, на вершине которого закреплена управляющая рукоятка. Для управления перемещением объекта нажимают пальцами руки на управляющую рукоятку устройства в нужном направлении, для осуществления поворота управляемого объекта прикладывают к управляющей рукоятке вращающий момент в нужном направлении и прекращают приложение усилия для остановки объекта. 2 з.п. ф-лы, 7 ил., 2 табл.
| WO 2005057396 A1, 23.06.2005 | |||
| УСТРОЙСТВО ВВОДА | 1991 |
|
RU2022335C1 |
| JP 7302161 A, 14.11.1995 | |||
| Барабанные летучие ножницы | 1959 |
|
SU135328A1 |
| JP 62064907 A, 24.03.1987. | |||

