Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству записи изображения и способу записи изображения для записи данных снятого изображения. Кроме того, настоящее изобретение относится к устройству обработки изображения и способу обработки изображения для выполнения обработки определения по содержанию изображения данных снятого изображения. Кроме того, настоящее изобретение относится к программам, выполняемым устройством записи изображения и устройством обработки изображения.
Уровень техники
В области устройств формирования изображения, таких как цифровая фотокамера, широкое распространение получила цифровая фотокамера, предназначенная для детектирования улыбки субъекта, такого как человек, с последующим автоматическим выполнением съемки и записи (ниже называется «съемка/запись»),
Например, в патентном документе 1 (публикация №2006-217478, находящаяся на экспертизе заявки на японский патент) описана структура автоматического определения множества изображений, которые формируют панорамное изображение, путем расчета величины движения устройства съемки изображения, используя результат детектирования, выводимый из гироскопического модуля или модуля GPS (Глобальная система навигации), предусмотренного в устройстве съемки изображения, с последующей съемкой/записью изображения.
Такая конструкция имеет функцию автоматического определения содержания изображения, соответствующего для съемки/записи, когда съемка/запись выполняется автоматически.
Сущность изобретения
Для облегчения понимания предположим состояние, в котором устройство формирования изображения установлено в неподвижной точке и выполняет съемку с помощью функции автоматической съемки на основе описанного выше детектирования улыбки. В этом случае снимают/записывают изображение, имеющее аналогичное содержание: субъекта с улыбающимся лицом многократно снимают в одной и той же композиции до тех пор, пока субъект, такой как человек, не изменится преднамеренно.
В соответствии с патентным документом 1, изображения, имеющие различное содержание, могут быть автоматически сняты/записаны на основе величины движения устройства съемки изображения. Для получения изображения, из которого формируют панорамное изображение, конструкция в соответствии с патентным документом 1 определенно является эффективной, но она не годится для обычной съемки/записи субъекта, такого как человек, с получением другого, кроме панорамного, изображения, поскольку эта конструкция зависит только от величины движения устройства съемки изображения.
В соответствии с этим, настоящее изобретение направлено на создание конструкции, которая определяет содержание изображения, для предотвращения получения избыточного изображения аналогичного содержания.
Устройство записи изображения в соответствии с вариантом воплощения настоящего изобретения включает в себя: модуль формирования изображения, предназначенный для получения данных снятого изображения путем съемки; средство определения конфигурации изображения, предназначенное для определения соответствующей конфигурации изображения на основе содержания изображения данных снятого изображения; средство управления получением конфигурации изображения, предназначенное для выполнения управления получением конфигурации изображения, для получения данных снятого изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, определенную средством определения конфигурации изображения; средство съемки/записи, предназначенное для записи данных снятого изображения на носителе записи в моменты времени, когда данные снятого изображения содержания изображения, имеющего соответствующую конфигурацию изображения, будут получены в результате выполнения управления получением конфигурации изображения; средство содержания информации истории съемки, предназначенное для содержания информации истории съемки, которая представляет собой информацию о конфигурации изображения соответствующих частей данных снятого изображения, записанных средством съемки/записи; средство определения исчерпания конфигурации изображения, предназначенное для определения, были ли данные снятого изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, такую же, как соответствующая конфигурация изображения, определенная средством определения конфигурации изображения, записаны заданное количество раз, путем обращения к информации истории съемки; и средство установки записи, предназначенное для предотвращения записи средством съемки/записи данных снятого изображения содержания изображения, имеющего соответствующую конфигурацию изображения, которая была определена как конфигурация, которая была записана заданное количество раз, средством определения исчерпания конфигурации изображения.
Здесь конфигурация изображения означает состояние определенных элементов, определяющих содержание изображения в кадре, или содержание изображения, которое фактически формируют в соответствии с состоянием определенных элементов, как описано ниже.
В описанной выше структуре конфигурацию изображения, которую рассматривают как соответствующую (соответствующую конфигурацию изображения), определяют на основе содержания изображения данных снятого изображения. Затем содержание изображения данных снятого изображения, имеющее заданную соответствующую конфигурацию изображения, получают фактически, при этом данные снятого изображения могут быть записаны. Таким образом, изображение, имеющее предпочтительное содержание изображения, может быть автоматически снято/записано.
При съемке данных изображения, имеющих такую же конфигурацию изображения, как определенная конфигурация соответствующего изображения, которая была записана заданное количество раз, данные снятого изображения, имеющие заданную соответствующую конфигурацию изображения, не записывают.
Таким образом, в соответствии с вариантом воплощения настоящего изобретения, когда автоматически записывают снятые изображения, имеющие предпочтительное содержание изображения, может быть предотвращена запись множества изображений, имеющих аналогичную конфигурацию изображения.
Краткое описание чертежей
На фиг.1А и 1В иллюстрируется сравнение двух частей содержания изображения, которые могут быть определены как имеющие такую же конфигурацию изображения, что и у изображения, полученного в результате съемки;
на фиг.2 иллюстрируется пример основной структуры блока определения конфигурации изображения в соответствии с вариантом воплощения;
на фиг.3 показана блок-схема последовательности операций, иллюстрирующая пример процедуры обработки, выполняемой блоком определения конфигурации изображения, представленным на фиг.2;
на фиг.4 показана блок-схема последовательности операций, иллюстрирующая другой пример процедуры обработки, выполняемой блоком определения конфигурации изображения, показанным на фиг.2;
на фиг.5 иллюстрируется цифровая фотокамера и головка панорамирования/наклона, включенная в систему формирования изображения в соответствии с вариантом воплощения;
на фиг.6А и 6В схематично иллюстрируется пример движений в направлении панорамирования и наклона цифровой фотокамеры, закрепленной на головке панорамирования/наклона в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.7 показана блок-схема, иллюстрирующая пример внутренней конструкции цифровой фотокамеры, включенной в систему формирования изображения в соответствии с вариантом воплощения;
на фиг.8 показана блок-схема, иллюстрирующая пример внутренней конструкции головки панорамирования/наклона, включенной в систему формирования изображения в соответствии с вариантом воплощения;
на фиг.9 показана блок-схема, иллюстрирующая пример внутренней структуры системы формирования изображения в соответствии с вариантом выполнения;
на фиг.10 показана блок-схема, иллюстрирующая пример внутренней структуры модуля определения конфигурации изображения, показанной на фиг.9;
на фиг.11 иллюстрируется пример правила самой основной автоматической съемки/записи, относящейся к определению конфигурации изображения в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.12 показана принципиальная иллюстрация примера операций автоматической съемки/записи системы формирования изображения, когда положения панорамирования и наклона приняты как элемент формирования конфигурации изображения;
на фиг.13 иллюстрируется пример автоматической съемки/записи, когда отдельный результат распознавания принят как элемент формирования конфигурации изображения;
на фиг.14 иллюстрируется пример автоматической съемки/записи, когда результат детектирования улыбки принят как элемент формирования конфигурации изображения;
на фиг.15 иллюстрируется пример автоматической съемки/записи, когда положение субъекта в кадре принято как элемент формирования конфигурации изображения;
на фиг.16 иллюстрируется пример автоматической съемки/записи, когда ориентация лица субъекта, детектируемого с помощью детектирования по ориентации лица, принят как элемент формирования конфигурации изображения;
на фиг.17 иллюстрируется пример автоматической съемки/записи, когда множество субъектов, присутствующих в кадре, принято как элемент формирования конфигурации изображения;
на фиг.18 иллюстрируется пример автоматической съемки/записи, когда размер субъекта в кадре принят как элемент формирования конфигурации изображения;
на фиг.19 иллюстрируется первый пример изменения алгоритма определения конфигурации изображения;
на фиг.20 иллюстрируется второй пример изменения алгоритма определения конфигурации изображения;
на фиг.21 иллюстрируется третий пример изменения алгоритма определения конфигурации изображения;
на фиг.22 иллюстрируется четвертый пример изменения алгоритма определения конфигурации изображения;
на фиг.23 иллюстрируется пример структуры информации истории съемки в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.24 иллюстрирует другой пример структуры информации истории съемки в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.25 иллюстрируется другой пример структуры информации истории съемки в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.26 показана блок-схема последовательности операций, иллюстрирующая первый пример процедуры обработки для автоматической съемки/записи в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.27 А и В показана блок-схема последовательности операций, иллюстрирующая пример процедуры обработки определения исчерпанной конфигурации изображения в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.28 показана блок-схема последовательности операций, иллюстрирующая второй пример процедуры обработки для автоматической съемки/записи в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.29 показана блок-схема последовательности операций, иллюстрирующая третий пример процедуры обработки для автоматической съемки/записи в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.30 показана блок-схема последовательности операций, иллюстрирующая четвертый пример процедуры обработки для автоматической съемки/записи в системе формирования изображения в соответствии с вариантом воплощения;
на фиг.31 иллюстрируется пример структуры таблицы индивидуальной регистрации;
на фиг.32 показана блок-схема последовательности операций, иллюстрирующая пример процедуры обработки для сознательной съемки/записи основного субъекта;
на фиг.33 иллюстрируется пример структуры блока определения конфигурации изображения, который выполнен с возможностью удалять информацию истории съемки;
на фиг.34 иллюстрируется сравнение значений ускорения, детектируемых датчиком ускорения в неподвижном состоянии и в состоянии, в котором цифровую фотокамеру принудительно перемещают;
на фиг.35 иллюстрируется пример структуры значений ускорения, детектируемых датчиком ускорения, когда положением цифровой фотокамеры управляют с помощью головки панорамирования/наклона;
на фиг.36 показана блок-схема последовательности операций, иллюстрирующая пример процедуры обработки для сброса информации истории съемки, выполняемой модулем управления сбросом, который показан на фиг.33;
на фиг.37 показана блок-схема, иллюстрирующая другой пример внутренней структуры системы формирования изображения в соответствии с вариантом воплощения;
на фиг.38 показана блок-схема, иллюстрирующая другой пример внутренней структуры системы формирования изображения в соответствии с вариантом воплощения;
на фиг.39 показана блок-схема, иллюстрирующая пример применения блока определения конфигурации изображения в другом варианте воплощения, кроме системы формирования изображения;
на фиг.40 показана блок-схема, иллюстрирующая пример применения блока определения конфигурации изображения в другом варианте воплощения, кроме системы формирования изображения;
на фиг.41 показана блок-схема, иллюстрирующая пример применения блока определения конфигурации изображения в другом варианте воплощения, кроме системы формирования изображения;
на фиг.42 показана блок-схема, иллюстрирующая пример структуры устройства редактирования, соответствующего устройству формирования изображения, показанному на фиг.41;
на фиг.43 показана блок-схема, иллюстрирующая пример применения блока определения конфигурации изображения в другом варианте воплощения, кроме системы формирования изображения; и
на фиг.44 показана блок-схема, иллюстрирующая пример структуры устройства печати, соответствующего устройству формирования изображения, показанному на фиг.41.
Подробное описание изобретения
Ниже, в описании лучшего режима выполнения изобретения (ниже называется вариант воплощения) используются следующие термины: композиция, кадр, угол обзора, угол съемки изображения и конфигурация изображения.
"Композиция" также называется кадрированием и представляет собой состояние положения (включающего в себя размер и ориентацию) субъекта в кадре.
"Кадр" представляет собой область определенной протяженности, соответствующую одному экрану, в пределах которой размещается изображение и которая обычно имеет прямоугольную внешнюю форму с длинной вертикальной стороной или длинной горизонтальной стороной.
"Угол обзора" также называется углом степени увеличения изображения и представляет собой угол, определяющий протяжность кадра, определенную положением линз регулирования степени увеличения в оптической системе устройства формирования изображения. Обычно угол обзора зависит от фокусного расстояния оптической системы формирования изображения и размера плоскости формирования изображения (датчик изображения или пленка). Здесь элемент, изменяющийся в зависимости от фокусного расстояния, называется углом обзора.
"Угол обзора съемки" представляет собой угол, определенный кадром изображения, полученного в результате съемки с помощью устройства формирования изображения, установленного в фиксированном положении, при этом протяженность определяется углом в направлении панорамирования (в горизонтальном направлении) и углом в направлении наклона (в вертикальном направлении) (углом возвышения и углом снижения) в дополнение к описанному выше углу обзора.
Например, «композиция» означает состояние расположения субъекта, присутствующего в кадре, определенном углом обзора съемки.
"Конфигурация изображения" включает в себя описанную выше композицию и представляет собой состояние определенного элемента, определяющего содержание изображения в кадре или содержание изображения, фактически сформированного в соответствии с состоянием этого определенного элемента.
Например, предположим, что существуют два изображения, и каждое из них имеет один и тот же субъект, представляющий собой одного и того же человека, и имеет одну и ту же композицию. В этом случае выражение человека как субъекта включено в элемент, формирующий содержание изображения. Кроме того, предположим, что в одном из этих двух изображений субъект улыбается, а в другом - не улыбается. В этом случае два изображения имеют одинаковую композицию, но разные конфигурации изображения.
Перед описанием структуры устройства в соответствии с вариантом воплощения будет описан эффект, получаемый с помощью варианта воплощения, со ссылкой на фиг.1А и 1В.
Описание приведено ниже со ссылкой на фиг.1А и 1В, с предположением, что устройство формирования изображения, такое как цифровая фотокамера, автоматически выполняет съемку и запись (ниже называется съемкой/записью) изображения, когда содержание изображения, получаемого в результате съемки, удовлетворяет заданному условию.
На фиг.1А иллюстрируется пример содержания изображения, полученного в результате съемки, то есть состояние, в котором три субъекта 301А, 301В и 301C присутствуют в кадре 300.
В таком случае, когда три субъекта детектируют с помощью устройства формирования изображения, удовлетворяется условие для съемки/записи, когда субъекты 301А, 301В и 301C равномерно расположены в вертикальном и горизонтальном направлениях внутри кадра 300 и когда размеры субъектов находятся в пределах заданного диапазона.
Изображение, показанное на фиг.1А, удовлетворяет такому условию. Таким образом, устройство формирования изображения снимает/записывает изображение с такой конфигурации изображения, при получении конфигурации изображения, показанной на фиг.1А.
Кроме того, предположим, что устройство формирования изображения после этого детектирует тех же субъектов 301А, 301В и 301C, показанных на фиг.1В. Содержание изображения, представленного на фиг.1В, будет другим, чем показано на фиг.1А в строгом значении, но удовлетворяет условию случая, когда детектируют трех субъектов. Таким образом, устройство формирования изображения снимает/записывает изображение, представленное на фиг.1В.
Как можно понять из приведенного выше описания, в случае, когда выполняют автоматическую съемку/запись, когда изображение удовлетворяет определенному условию содержания изображения, множество аналогичных изображений снимают до тех пор, пока содержание, включающее в себя субъект изображения, снятое устройством формирования изображения, не будет преднамеренно изменено. Такие снятые изображения не интересны для пользователя, который просматривает их. Кроме того, аналогичные изображения снимают/записывают избыточно и с напрасным расходом ресурсов, и, таким образом, впустую расходуется объем носителя записи.
В соответствии с этим, в варианте воплощения предложена структура, которая предотвращает избыточную съемку аналогичных изображений, как описано ниже.
На фиг.2 концептуально иллюстрируется пример самой основной структуры в соответствии с вариантом воплощения.
На фиг.2 иллюстрируется блок 200 определения конфигурации изображения. Блок 200 определения конфигурации изображения снимает данные изображения и выполняет обработку определения конфигурации изображения, и включает в себя модуль 201 определения конфигурации изображения и модуль 202 содержания истории, как показано на фиг.2.
В дополнение к блоку 200 определения конфигурации изображения здесь представлен модуль 203 использования результата определения. Модуль 203 использования результата определения выполняет заданную операцию, используя результат определения конфигурации изображения, полученный из блока 200 определения конфигурации изображения. Блок 200 определения конфигурации изображения управляет обработкой и операцией, выполняемой модулем 203 использования результата определения, в соответствии с результатом определения конфигурации изображения, полученным в ходе обработки определения конфигурации изображения блоком 200 определения конфигурации изображения.
Фактически, модуль 203 использования результата определения изменяется в зависимости от применения блока 200 определения конфигурации изображения, представленного на фиг.2. Например, когда блок 200 определения конфигурации изображения применяют для автоматической съемки/записи в устройстве формирования изображения, таком как цифровая фотокамера, модуль 203 использования результата определения используют как модуль съемки/записи для записи данных снятого изображения, имеющего содержание изображения, в соответствии с результатом определения конфигурации изображения, в устройстве формирования изображения.
В блоке 200 определения конфигурации изображения модуль 201 определения конфигурации изображения снимает данные изображения и выполняет обработку определения конфигурации изображения для определения конфигурации изображения, которая может быть получена из содержания изображения и которую можно рассматривать как соответствующую (соответствующую конфигурацию изображения) на основе содержания изображения снятых данных изображения. Затем получают информацию результата определения для процесса определения конфигурации изображения.
Процесс определения конфигурации изображения, выполняемый модулем 201 определения конфигурации изображения, может быть реализован, когда CPU (ЦПУ, центральное процессорное устройство) или тому подобное выполняет программу. Таким образом, процесс определения конфигурации изображения может быть реализован с помощью программных средств. В соответствии с необходимостью, обработка сигнала изображения может выполняться одновременно с использованием программных средств или аппаратных средств.
Как описано выше, модуль 203 использования результата определения выполняет заданную операцию в соответствии с определением конфигурации изображения под управлением модуля 201 определения конфигурации изображения, в соответствии с результатом определения конфигурации изображения, и выполняет заданную операцию, используя информацию результата определения конфигурации изображения.
Например, предположим, что модуль 203 использования результата определения представляет собой описанный выше модуль съемки/записи. В этом случае, модуль 201 определения конфигурации изображения управляет модулем 203 использования результата для получения содержания изображения для данных снятого изображения, имеющих соответствующую конфигурацию изображения, в соответствии с результатом определения обработки определения конфигурации изображения, и затем позволяет модулю 203 использования результата определения выполнить съемку/запись в момент времени, когда получают соответствующую конфигурацию изображения.
Кроме того, после завершения операции модуля 203 использования результата определения, отражающей результат определения конфигурации изображения, как описано выше, модуль 201 определения конфигурации изображения обеспечивает возможность для модуля 202 содержания предыстории сохранять и считывать информацию результата определения, используемую в этот момент времени (информация использования результата определения). В соответствии с этим набор информации использования результата определения, содержащийся в модуле 202 содержания предыстории, формирует информацию предыстории использования результата определения.
На фиг.3 иллюстрируется пример процедуры обработки, выполняемой блоком 200 определения конфигурации изображения, показанным на фиг.2. В следующем описании соответствующие этапы выполняют с помощью модуля 201 определения конфигурации изображения в блоке 200 определения конфигурации изображения.
На этапе S101 модуль 201 определения конфигурации изображения начинает съемку данных изображения.
На этапе S102 модуль 201 определения конфигурации изображения выполняет описанную выше обработку определения конфигурации изображения, используя данные снятого изображения. В соответствии с этим, модуль 201 определения конфигурации изображения получает как результат определения (результат определения конфигурации изображения) информацию, обозначающую состояние заданного параметра (элемента формирования конфигурации изображения), для удовлетворения условия в соответствующей конфигурации изображения.
На этапе S103 модуль 201 определения конфигурации изображения управляет модулем 203 использования результата определения, таким образом, что отражается результат определения конфигурации изображения, полученный на этапе S102. Например, когда модуль 203 использования результата определения представляет собой описанный выше модуль съемки/записи, модуль 201 определения конфигурации изображения управляет модулем съемки/записи, таким образом, чтобы получить содержание изображения для конфигурации изображения, полученной как результат определения.
На этапе S104 модуль 201 определения конфигурации изображения получает информацию предыстории использования результата определения путем считывания ее из модуля 202 содержания предыстории. На этапе S105 модуль 201 определения конфигурации изображения сравнивает результат определения конфигурации изображения, полученной на этапе S102, с частями информации использования результата определения, формирующей информацию предыстории использования результата определения. Результат определения конфигурации изображения, сравниваемой здесь, может включать в себя результат операции в соответствии с управлением на этапе S103 и информацию (параметры), обозначающие состояние различных элементов установки, полученных модулем 203 использования результата определения, в дополнение к информации, соответствующей самому результату определения, полученному в процессе определения конфигурации изображения на этапе S102. Например, в описанном выше модуле съемки/записи параметры могут представлять собой информацию установки фотокамеры, такие как положение линз регулировки степени увеличения (угол обзора), апертура, скорость затвора и баланс белого.
Затем, на основе результата сравнения на этапе S105 модуль 201 определения конфигурации изображения определяет на этапе S106 была ли исчерпана конфигурация изображения, обозначенная по результату определения, полученному на этапе S102.
Здесь "исчерпанный" означает, что модуль 203 использования результата определения выполнил завершение операции, используя результат определения конфигурации изображения, имеющего одно и то же содержание, заданное количество раз.
Как следует понимать из приведенного выше описания, информация использования результата определения, которая формирует информацию использования результата определения, содержащуюся в модуле 202 содержания предыстории, обозначает результат определения конфигурации изображения, которую использовали в модуле 203 использования результата определения для окончания заданной операции. Таким образом, в результате сравнения на этапе S105, если количество частей информации использования результата определения, имеющих одно и то же содержание (или имеющих аппроксимацию в пределах заданного диапазона), что и результат определения конфигурации изображения, полученный на этапе S102, будет равно или больше, чем описанное выше заданное количество раз, на этапе S106 получают положительный результат определения.
С другой стороны, в качестве результата сравнения на этапе S105, если количество частей информации использования результата определения, имеющей то же содержание (или имеющей аппроксимацию в пределах заданного диапазона), что и результат определения для конфигурации изображения, полученной на этапе S102, меньше, чем описанное выше заданное количество раз, получают отрицательный результат определения на этапе S106.
Если на этапе S106 определяют, что конфигурация изображения не была исчерпана, и получают отрицательный результат определения, обработка переходит на этап S107, где модуль 201 определения конфигурации изображения передает инструкцию в модуль 203 использования результата определения для окончания операции, исполняемой с помощью управления на этапе S103. В соответствии с этим, модуль 203 использования результата определения заканчивает работу, обеспечивая, таким образом, отражение результата операции, по которому была определена конфигурация изображения на этапе S102. Например, когда модуль 203 использования результата определения представляет собой описанный выше модуль съемки/записи, модуль 201 определения конфигурации изображения предоставляет инструкции, для записи снятых данных изображения как инструкции об окончании операции на этапе S107. В ответ на эти инструкции модуль съемки/записи выполняет операцию записи данных снятого изображения, полученных в этот момент времени, то есть данных снятого изображения, которые были получены в этот момент времени в результате управления на этапе S103 и которые имеют содержание изображения в соответствии с заданной конфигурацией изображения на носителе записи. В соответствии с этим, операция записи данных изображения для конфигурации изображения в соответствии с результатом определения на носителе записи будет закончена.
После окончания операции модуля 203 использования результата определения модуль 201 определения конфигурации изображения обновляет информацию предыстории использования результата определения, содержащуюся в модуле 202 содержания предыстории. Таким образом, модуль 201 определения конфигурации изображения регистрирует информацию, обозначающую результат определения, полученную на этапе S102, как новую информацию использования результата определения, в информации предыстории использования результата определения. Информация использования результата определения может включать в себя информацию об описанных выше параметрах, которые установлены в модуле 203 использования результата определения, в соответствии с управлением на этапе S103.
С другой стороны, если на этапе S106 определяют, что конфигурация изображения была исчерпана, и был получен положительный результат определения, этапы S107 и S108 не выполняют, и обработка возвращается на этап S102, где выполняют процесс определения конфигурации изображения.
В соответствии с этой обработкой, если состояние, в котором не возникают существенные изменения в конфигурации изображения снятых данных изображения, продолжается после этого, на этапе S106 получают положительный результат определения, таким образом, что модуль 203 использования результата определения не заканчивает и не устанавливает операцию, в которой отражается результат определения. Другими словами, результат определения модуль 203 использования результата определения не повторяет завершение операции в соответствии с результатом определения той же соответствующей конфигурации изображения больше, чем необходимо.
Если содержание изображения снятых данных изображения в некоторый момент изменяется, одновременно с этим получают результат определения в отношении соответствующей конфигурации изображения, в соответствии с новым содержанием изображения, даже в процессе определения конфигурации изображения на основе того же алгоритма. В это время получают отрицательный результат определения на этапе S106, таким образом, что будет выведен результат определения конфигурации изображения вокруг содержания нового изображения.
В примере, показанном на фиг.3, если на этапе S106 определяют, что конфигурация изображения была исчерпана, и получают положительный результат определения, обработка возвращается на этап S102 для выполнения обработки определения конфигурации изображения. В качестве альтернативы, обработка определения конфигурации изображения не может выполняться после этого. В этом случае, также, можно предотвратить выполнение и окончание модулем 203 использования результата определения операции, по которому определяют результат определения аналогичной конфигурации изображения больше, чем необходимое количество раз.
На фиг.4 иллюстрируется другой пример процедуры обработки, выполняемой блоком 200 определения конфигурации изображения, показанным на фиг.2. В этом примере также соответствующие этапы выполняют с помощью модуля 201 определения конфигурации изображения в блоке 200 определения конфигурации изображения.
Этапы S201-S206 и этапы S208 и S209 на фиг.4 являются теми же, что и этапы S101-S108 на фиг.3.
Следует отметить, что в процедуре обработки, показанной на фиг.4, если положительный результат определения будет получен в процессе определения, была ли исчерпана конфигурация изображения на этапе S206, выполняют этап S207 и затем обработка возвращается на этап S202.
В этом примере модуль 201 определения конфигурации изображения имеет множество алгоритмов для обработки определения конфигурации изображения (алгоритмы определения конфигурации изображения), соответствующим образом выбирает один из алгоритмов определения конфигурации изображения и может выполнить обработку определения конфигурации изображения на основе выбранного алгоритма определения конфигурации изображения.
Затем на этапе S207 модуль 201 определения конфигурации изображения меняет алгоритм определения конфигурации изображения, который был установлен в данный момент времени, на другой алгоритм определения конфигурации изображения. В соответствии с этим, когда обработка возвращается на этап S202, выполняют обработку определения конфигурации изображения на основе других алгоритмов определения конфигурации изображения.
В структуре, показанной на фиг.2, постоянно получают исчерпанную конфигурацию изображения как результат определения, если только не произойдет существенное изменение в содержании изображения (например, изменение субъекта), получаемом в модуле 201 определения конфигурации изображения.
С другой стороны, если алгоритм определения конфигурации изображения меняют в соответствии с получением результата определения исчерпанной конфигурации изображения, как показано на фиг.4, модуль 203 использования результата определения может выполнять операцию путем отражения соответствующей конфигурации изображения, отличающейся от предыдущей конфигурации, даже если в содержании изображения данных снятого изображения не произошло существенного изменения.
Например, когда модуль 203 использования результата определения представляет собой модуль съемки/записи, множество снятых изображений, в которых отображаются результаты определения различных конфигураций изображения, могут быть записаны, даже если в содержании изображения данных изображения, полученных в результате съемки, не произошло существенного изменения.
Далее приведено описание системы формирования изображения, включающей в себя цифровую фотокамеру и головку панорамирования/наклона, на которой установлена цифровая фотокамера, как более конкретный пример применения структуры для определения конфигурации изображения, описанной со ссылкой на фиг.2-4. Система формирования изображения в соответствии с данным вариантом воплощения выполнена с возможностью съемки/записи неподвижного изображения, имеющего содержание изображения, в котором отражается определенная конфигурация изображения.
На фиг.5 показан вид спереди, иллюстрирующий пример внешней структуры системы формирования изображения в соответствии с данным вариантом воплощения.
Как показано на фиг.5, система формирования изображения в данном варианте воплощения включает в себя цифровую фотокамеру 1 и головку 10 панорамирования/наклона.
Цифровая фотокамера 1 выполнена с возможностью генерирования данных неподвижного изображения на основе света, формирующего изображения, полученного путем съемки с помощью модуля 3 объектива, предусмотренного на панели, расположенной на передней стороне основного корпуса, и сохранения данных неподвижного изображения на носителе записи, установленном внутри. Таким образом, цифровая фотокамера 1 имеет функцию содержания изображения, снятого как фотография в виде данных неподвижного изображения на носителе записи. Когда такую съемку фотографии выполняют вручную, пользователь нажимает на кнопку затвора (кнопку съемки) на верхней поверхности основного корпуса.
Цифровая фотокамера 1 может быть установлена на головке 10 панорамирования/наклона путем закрепления ее на ней. Таким образом, головка 10 панорамирования/наклона и цифровая фотокамера 1 имеют модуль механизма, обеспечивающий возможность взаимного крепления.
Головка 10 панорамирования/наклона имеет механизм панорамирования/наклона, который перемещает цифровую фотокамеру 1, закрепленную на ней, как в направлении панорамирования (в горизонтальном направлении), так и в направлении наклона.
Пример движений цифровой фотокамеры 1 в направлениях панорамирования и наклона, обеспечиваемых механизмом панорамирования/наклона, головки 10 панорамирования/наклона, показан на фиг.6А и 6В. На фиг.6А и 6В показана цифровая фотокамера 1, закрепленная на головке 10 панорамирования/наклона, в виде сверху и сбоку соответственно.
Что касается направления панорамирования, состояние положения, в котором поперечное направление основного корпуса цифровой фотокамеры 1 совпадает с прямой линией X1, показанной на фиг.6А, рассматривается как опорное положение. Относительно этого опорного положения при повороте вокруг оси Ct1 вращения в направлении +α вращения для цифровой фотокамеры 1 обеспечивается движение панорамирования в направлении вправо. С другой стороны, при повороте в направлении -α вращения обеспечивается движение панорамирования цифровой фотокамеры 1 в направлении влево.
Что касается направления наклона, состояние положения, в котором продольное направление основного корпуса цифровой фотокамеры 1 совпадает с вертикальной прямой линией Y1, показанной на фиг.6В, рассматривается как опорное положение. Относительно этого опорного положения, при вращении вокруг оси Ct2 вращения вдоль направления +β вращения для цифровой фотокамеры 1 обеспечивается направление поворота вниз. С другой стороны, когда цифровую фотокамеру 1 поворачивают в направлении -β вращения, для цифровой фотокамеры 1 обеспечивается движение наклона в направлении вверх.
Максимальные возможные углы поворота в направлениях ±α и направлениях ±β, показанных на фиг.6А и 6В, не описаны. Однако максимально допустимые углы поворота предпочтительно следует выбирать как можно большими для обеспечения максимальных возможностей съемки изображения субъектов.
На фиг.7 иллюстрируется пример внутренней структуры цифровой фотокамеры 1.
Как показано на фиг.7, модуль 21 оптической системы включает в себя группу объектива для съемки изображения, включающую в себя заданное количество линз, таких как линзы регулирования степени увеличения и линзы фокусирования, и диафрагму. Модуль 21 оптической системы обеспечивает возможность фокусирования падающего света как света формирования изображения на поверхности приема света датчика 22 изображения.
Кроме того, модуль 21 оптической системы включает в себя модуль механизма привода, предназначенный для привода описанных выше линз регулирования степени увеличения, линз фокусирования и диафрагмы. Работой модуля механизма привода управляют с помощью так называемого управления фотокамеры, выполняемого модулем 27 управления, такого как управление степенью увеличения (углом обзора), управление автоматической регулировки фокуса и автоматическое управление экспозицией.
Датчик 22 изображения выполняет так называемое фотоэлектрическое преобразование, состоящее в преобразовании света, формирующего изображение, полученного в модуле 21 оптической системы, в электрический сигнал. С этой целью датчик 22 изображения принимает на поверхности приема света устройства фотоэлектрического преобразования свет, формирующий изображение, из модуля 21 оптической системы, и последовательно выводит сигналы в виде зарядов, накопленных в соответствии с интенсивностью принятого света, в заданные моменты времени. В соответствии с этим выводят электрический сигнал (сигнал изображения), соответствующий свету формирования изображения. Устройство фотоэлектрического преобразования (устройство формирования изображения), используемое как датчик 22 изображения, не ограничено чем-то конкретным и может представлять собой в современных условиях, например, датчик CMOS (КМОП, комплементарный металло-оксидный полупроводник) или CCD (ПЗС, прибор с зарядовой связью). Когда используют датчик КМОП, устройство (модуль), соответствующее датчику 22 изображения, может включать в себя аналогово-цифровой преобразователь, соответствующий A/D (А/Ц, аналогово-цифровой) преобразователю 23, описанному ниже.
Сигнал изображения, выводимый из датчика 22 изображения, подаваемый в А/Ц преобразователь 23, преобразуют здесь в цифровой сигнал и выводят в модуль 24 обработки сигнала.
Модуль 24 обработки сигнала принимает цифровой сигнал изображения, выводимый из А/Ц преобразователя 23, например, в виде отдельных неподвижных изображений (изображений кадра). Затем модуль 24 обработки сигнала выполняет заданную обработку сигналов для сигнала изображения для этих отдельных неподвижных изображений, для генерирования данных снятого изображения (данных снятого неподвижного изображения), которые представляют собой данные сигнала изображения, соответствующие неподвижному изображению.
В случае, когда данные снятого изображения, сгенерированные модулем 24 обработки сигнала, так как описано выше, будут записаны как информация изображения на карту памяти 40, которая представляет собой носитель записи, данные снятого изображения, соответствующие одному неподвижному изображению, выводят из модуля 24 обработки сигнала в модуль 25 кодирования/декодирования.
Модуль 25 кодирования/декодирования выполняет кодирование сжатия на основе заданного способа кодирования сжатия неподвижного изображения для данных снятого изображения в виде блоков неподвижных изображений, выводимых из модуля 24 обработки сигнала, и добавляет заголовок или тому подобное в соответствии с управлением, выполняемым модулем 27 управления, преобразуя, таким образом, данные снятого изображения в данные снятого изображения, сжатые с использованием заданного способа. Затем модуль 25 кодирования/декодирования передает данные снятого изображения, сгенерированные таким образом, в контроллер 26 носителя. Контроллер 26 носителя записывает и сохраняет переданные данные снятого изображения на карту 40 памяти в соответствии с управлением, выполняемым модулем 27 управления. Карта 40 памяти, используемая здесь, представляет собой носитель записи, который имеет внешнюю поверхность карты в соответствии с заданным стандартом и который включает в себя элемент энергонезависимого полупроводникового накопителя, такого как запоминающее устройство типа флэш. В качестве альтернативы, носитель записи, предназначенный для сохранения данных изображения, может иметь другой тип и формат, кроме карты памяти.
Модуль 24 обработки сигнала в соответствии с данным вариантом воплощения выполнен с возможностью обработки изображения для детектирования субъекта, используя данные снятого изображения. Процесс детектирования субъекта в данном варианте воплощения описан ниже.
Кроме того, цифровая фотокамера 1 выполнена с возможностью отображения так называемого сквозного изображения, которое представляет собой изображение, снимаемое в данный момент времени, обеспечивая возможность выполнения модулем 33 дисплея отображения изображения, используя данные снятого изображения, полученные в модуле 24 обработки сигнала. Например, модуль 24 обработки сигнала снимает сигнал изображения, выводимый из А/Ц преобразователя 23, и генерирует данные снятого изображения, соответствующие неподвижному изображению, как описано выше. Продолжая такую операцию, модуль 24 обработки сигнала последовательно генерирует данные снятого изображения, соответствующие изображениям кадра движущегося изображения, и затем передает последовательно сгенерированные данные снятого изображения в привод 32 дисплея в соответствии с управлением, выполняемым модулем 27 управления. В соответствии с этим отображается сквозное изображение.
Привод 32 дисплея генерирует сигнал привода для управления модулем 33 дисплея на основе данных снятого изображения, вводимых из модуля 24 обработки сигнала, описанным выше образом, и выводит сигнал привода в модуль 33 дисплея. В соответствии с этим, изображения на основе данных снятого изображения в блоках неподвижных изображений последовательно отображают в модуле 33 дисплея. Когда пользователь видит эти изображения, изображения, снятые в это время, отображаются в модуле 33 дисплея как движущиеся изображения. Таким образом, отображаются сквозные изображения.
Кроме того, цифровая фотокамера 1 выполнена с возможностью воспроизведения данных снятого изображения, записанных в карте 40 памяти, и отображения изображения в модуле 33 дисплея.
С этой целью модуль 27 управления определяет данные снятого изображения и передает команду на считывание данных из карты 40 памяти в контроллер 26 носителя. В ответ на эту команду контроллер 26 носителя обращается по адресу в карту 40 памяти, в которой содержатся указанные данные снятого изображения, считывает эти данные, передает считанные данные в модуль 25 кодирования/декодирования.
Модуль 25 кодирования/декодирования выделяет требуемые данные как сжатые данные неподвижного изображения из данных снятого изображения, переданных из контроллера 26 носителя в соответствии с управлением, выполняемым модулем 27 управления, выполняет обработку декодирования для кодирования сжатия сжатых данных неподвижного изображения и получает данные снятого изображения, соответствующие неподвижному изображению. Затем модуль 25 кодирования/декодирования передает данные снятого изображения в драйвер 32 дисплея. В соответствии с этим, изображение, соответствующее данным снятого изображения, записанным в карте 40 памяти, воспроизводят и отображают в модуле 33 дисплея.
В дополнение к описанным выше неподвижным изображениям и воспроизводимым изображениям из данных снятого изображения в модуле 33 дисплея может отображаться изображение интерфейса пользователя. В этом: случае модуль 27 управления генерирует данные изображения, отображаемые как требуемое изображение интерфейса пользователя, в соответствии со статусом операции, выполняемой в это время, и выводит сгенерированные данные изображения в драйвер 32 дисплея. В соответствии с этим, изображение интерфейса пользователя отображается в модуле 33 дисплея. Изображение интерфейса пользователя может отображаться как определенный экран меню отдельно от сквозного изображения или воспроизводимого изображения данных снятого изображения на экране 33 дисплея модуля дисплея. В качестве альтернативы, изображение интерфейса пользователя может отображаться как наложенное на или скомбинированное с частью сквозного изображения или воспроизводимого изображения по данным снятого изображения.
Модуль 27 управления фактически включает в себя ЦПУ (центральное процессорное устройство) и содержит микрокомпьютер, вместе с ROM (ПЗУ, постоянным запоминающим устройством) 28 и RAM (ОЗУ, оперативным запоминающим устройством) 29. В ПЗУ 28 содержится программа, которая должна быть выполнена ЦПУ, которое работает в качестве модуля 27 управления, и различные части установочной информации, относящейся к работе цифровой фотокамеры 1. ОЗУ 29 используется как основное устройство накопителя для ЦПУ.
В этом случае запоминающее устройство 30 типа флэш предусмотрено как энергонезависимая область накопителя, используемая для сохранения различных частей установочной информации, которая должна изменяться (должна быть перезаписана) в соответствии с операцией пользователя или историей операции. Когда энергонезависимое запоминающее устройство, такое как запоминающее устройство типа флэш, используется в качестве ПЗУ 28, часть области сохранения в ПЗУ 28 может использоваться вместо запоминающего устройства 30 типа флэш.
Модуль 31 операций включает в себя различные элементы операций, предусмотренные в цифровой фотокамере 1, и модуль вывода сигнала информации операции для генерирования сигнала информации операций в соответствии с операцией, выполняемой в этих элементах операций, и вывода этого сигнала в ЦПУ. Модуль 27 управления выполняет заданную обработку в соответствии с сигналом информации операции, вводимым в модуле 31 операций. В соответствии с этим выполняется работа цифровой фотокамеры 1 в соответствии с операцией пользователя.
Модуль 34 связи с головкой панорамирования/наклона осуществляет обмен данными между головкой 10 панорамирования/наклона и цифровой фотокамерой 1 в соответствии с заданным способом передачи данных. Модуль 34 связи с головкой панорамирования/наклона имеет структуру физического уровня, обеспечивающую возможность передачи/приема сигналов связи в/из модуля связи головки 10 панорамной/съемки наклона по проводам или по беспроводному каналу в состоянии, в котором цифровая фотокамера 1 закреплена на головке 10 панорамирования/наклона, и также имеет конструкцию, обеспечивающую реализацию связи, соответствующую заданному более высокому уровню, чем физический уровень.
На фиг.8 показана блок-схема, иллюстрирующая пример конструкции головки 10 панорамирования/наклона.
Как описано выше, головка 10 панорамирования/наклона имеет механизм панорамирования/наклона и включает в себя модуль 53 механизма панорамирования, двигатель 54 панорамирования, модуль 56 механизма наклона и двигатель 57 наклона, которые соответствуют механизму панорамирования/наклона.
Модуль 53 механизма панорамирования имеет механизм, предназначенный для перемещения цифровой фотокамеры 1, закрепленной на головке 10 панорамирования/наклона в направлениях панорамной (горизонтальной) съемки, показанных на фиг.6А. Движение этого механизма может быть получено в результате вращения двигателя 54 панорамирования в направлении вперед или назад. Аналогично, модуль 56 механизма наклона имеет механизм для перемещения цифровой фотокамеры 1, закрепленной на головке 10 панорамирования/наклона, в направлении наклона (в вертикальном направлении), показанном на фиг.6В. Движение этого механизма может быть получено при вращении двигателя 57 наклона 57 в направлении вперед или в направлении назад.
Модуль 51 управления включает в себя микрокомпьютер, который сформирован путем комбинирования, например, ЦПУ, ПЗУ и ОЗУ, и управляет движениями описанного выше модуля 53 механизма панорамирования и модуля 56 механизма наклона. Например, когда модуль 51 управления управляет движением модуля 53 механизма панорамирования, модуль 51 управления выводит сигнал управления, соответствующий величине движения и направлению движения, необходимым для модуля 53 механизма панорамирования, для модуля 55 привода панорамирования. Модуль 55 привода панорамирования генерирует сигнал управления двигателем, соответствующий сигналу управления, вводимому в него, и выводит этот сигнал в двигатель 54 панорамирования. Сигнал привода двигателя обеспечивает вращение двигателя 54 панорамирования в заданном направлении вращения на заданный угол поворота. В результате, модулем 53 механизма панорамирования управляют для перемещения на соответствующую величину перемещения, в соответствующее направление перемещения.
Аналогично, когда модуль 51 управления управляет движением модуля 56 механизма наклона, модуль 51 управления выводит сигнал управления, соответствующий величине движения и направлению движения, необходимым для модуля 56 механизма наклона, в модуль 58 привода наклона. Модуль 58 привода наклона генерирует сигнал управления двигателем, соответствующий сигналу управления, поступившему в него, и выводит этот сигнал в двигатель 57 наклона. Сигнал управления двигателем обеспечивает вращение двигателя 57 наклона в заданном направлении вращения и на заданный угол поворота. В результате, модулем 56 механизма наклона управляют для передвижения на соответствующую величину движения в соответствующем направлении движения.
Модуль 52 связи выполняет связь с модулем 34 связи головки панорамирования/наклона в цифровой фотокамере 1, закрепленной на головке 10 панорамирования/наклона, в соответствии с заданным способом связи. Аналогично модулю 34 связи головки панорамной/съемки наклона модуль 52 связи имеет структуру физического уровня, обеспечивающую возможность передачи/приема сигналов связи в/из модуля связи на другой стороне по проводам или по беспроводному каналу, и структуру для реализации связи, соответствующую заданному более высокому уровню, чем физический уровень.
На фиг.9 показана блок-схема, соответствующая соответствующим функциональным операциям, иллюстрирующая внутреннюю конструкцию цифровой фотокамеры 1 и головки 10 панорамирования/наклона, включенной в систему формирования изображения в соответствии с данным вариантом воплощения.
Как показано на фиг.9, цифровая фотокамера 1 включает в себя блок 61 съемки/записи, блок 62 определения конфигурации изображения, блок 63 управления панорамной съемкой/наклоном/степенью увеличения изображения и блок управления 64 управления связью.
Блок 61 съемки/записи выполняет обработку управления для получения изображения, полученного в результате съемки, в качестве данных сигнала изображения (данных снятого изображения) и сохраняет данные снятого изображения на носителе записи. Блок 61 съемки/записи включает в себя оптическую систему для съемки изображения, устройство формирования изображения (датчик изображения), схему обработки сигналов для генерирования данных снятого изображения из сигнала, выводимого из устройства формирования изображения, и систему управления/обработки записи для записи данных снятого изображения на носителе записи, для записи (сохранения) данных.
В этом случае, запись данных снятого изображения (съемка/запись) в блоке 61 съемки/записи выполняется на основе инструкций и управления блоком 62 определения конфигурации изображения (модуль 212 обработки определения конфигурации изображения).
Блок 62 определения конфигурации изображения отбирает и принимает данные снятого изображения, выводимые из блока 61 съемки/записи, и выполняет обработку определения конфигурации изображения на основе данных снятого изображения. Кроме того, блок 62 определения конфигурации изображения также выполняет управление получением конфигурации изображения для получения данных снятого изображения, имеющих содержание изображения, на основе определенной конфигурации изображения.
Блок 62 определения конфигурации изображения соответствует блоку 200 определения конфигурации изображения, показанному на фиг.2.
Блок 63 управления панорамной съемкой/наклоном/степенью увеличения изображения выполняет управление панорамной съемкой/наклоном/степенью увеличения таким образом, что композиция и угол обзора съемки, соответствующие определенной соответствующей конфигурации изображения, могут быть получены в ответ на инструкции из блока 62 определения конфигурации изображения. Таким образом, при управлении получения конфигурации изображения блок 62 определения конфигурации изображения уведомляет блок 63 управления панорамной съемкой/наклоном/степенью увеличения о композиции и об угле съемки, которые должны быть получены в соответствии с определенной соответствующей конфигурацией изображения. Блок 63 управления панорамной съемкой/наклоном/степенью увеличения рассчитывает величину движения механизма панорамирования/наклона головки 10 панорамирования/наклона, для ориентирования цифровой фотокамеры 1 в направлении съемки, для получения указанной композиции и угла обзора при съемке, и генерирует сигнал управления панорамной съемкой/наклоном для предоставления инструкций о величине движения в соответствии с рассчитанной величиной движения.
Кроме того, блок 63 управления панорамной съемкой/наклоном/степенью увеличения рассчитывает положение степени увеличения для получения определенного соответствующего угла обзора и управляет механизмом степени увеличения, включенным в блок 61 съемки изображения/записи, для получения положения степени увеличения.
Блок 64 управления связью выполняет связь с блоком 71 управления связью в головке 10 панорамирования/наклона, в соответствии с заданным протоколом связи. Сигнал управления панорамной съемкой/наклоном, генерируемый блоком 63 управления панорамной съемкой/наклоном/степенью увеличения, передают в блок 71 управления связью в головке 10 панорамирования/наклона, используя связь, осуществляемую с помощью блока 64 управления связью.
Головка 10 панорамирования/наклона включает в себя блок 71 управления связью и блок 72 управления панорамной съемкой/наклоном, как показано на фиг.9.
Блок 71 управления связью выполняет связь с блоком 64 управления связью в цифровой фотокамере 1. При приеме описанного выше сигнала управления панорамной съемкой/наклоном блок 71 управления связью выводит сигнал управления панорамной съемкой/наклоном в блок 72 управления панорамной съемкой/наклоном.
Блок 72 управления панорамной съемкой/наклоном соответствует исполнительной функции обработки, относящейся к управлению панорамной съемкой/наклоном, среди обработки управления, выполняемой микрокомпьютером (здесь не показан) на стороне головки 10 панорамирования/наклона.
Блок 72 управления панорамной съемкой/наклоном управляет модулем механизма привода панорамирования и модулем механизма привода наклона (здесь не показаны) в ответ на сигнал управления панорамной съемкой/наклоном, вводимым в него. В соответствии с этим, выполняют панорамную съемку/наклон для получения необходимых горизонтального и вертикального углов обзора для соответствующей конфигурации изображения.
В этом случае блок 62 определения конфигурации изображения выполняет обработку детектирования субъекта, таким образом, как описано ниже. Если ни один субъект не детектируют в результате обработки детектирования субъекта, блок 63 управления панорамной съемкой/наклоном/степенью увеличения может выполнять управление панорамной съемкой/наклоном/степенью увеличения для поиска субъекта, например, в ответ на инструкции.
На фиг.10 иллюстрируется пример внутренней структуры блока 62 определения конфигурации изображения, показанного на фиг.9. Блок 62 определения конфигурации изображения, представленный на этом чертеже, в общем, включает в себя модуль 210 определения конфигурации изображения и модуль 213 содержания истории съемки. Модуль 210 определения конфигурации изображения соответствует модулю 201 определения конфигурации изображения, показанному на фиг.2, в то время как модуль 213 содержания истории съемки соответствует модулю 202 содержания истории.
Кроме того, модуль 210 определения конфигурации изображения в данном случае включает в себя модуль 211 детектирования субъекта и модуль 212 обработки определения конфигурации изображения.
Кроме того, на фиг.10 иллюстрируется блок 61 съемки/записи и блок 63 управления панорамной съемкой/наклоном/степенью увеличения, соответствующие модулю 203 использования результата определения на фиг.2, вместе с блоком 62 определения конфигурации изображения.
Модуль 211 детектирования субъекта отбирает данные снятого изображения, выводимые из блока 61 съемки/записи, и выполняет обработку детектирования субъекта.
Обработка детектирования субъекта представляет собой обработку различения и детектирования субъекта как человека среди содержания изображения отобранных данных снятого изображения. Информация, полученная как результат детектирования (информация детектирования отдельного субъекта), включает в себя ряд субъектов как людей, информацию положения в кадре соответствующих субъектов или отдельных субъектов (например, положение в кадре может быть выражено как координаты Х и Y пикселя в матрице), и размер изображения отдельных субъектов (занимаемая область).
В качестве конкретного способа процесса детектирования субъекта можно использовать технологию детектирования лица. Некоторые способы детектирования лица используются в предшествующем уровне техники. Способ, применяемый в данном варианте воплощения, не ограничен чем-либо конкретным, и соответствующий способ может быть принят с учетом точности детектирования, уровня сложности конструкции, способ, принятый для детектирования степени неподвижности, описанный ниже, и так далее.
Кроме того, модуль 211 детектирования субъекта в данном варианте воплощения выполняет в качестве обработки детектирования субъекта обработку индивидуального распознавания, состоящую в различении индивидуума в детектированном отдельном субъекте. Таким образом, описанная выше информация детектирования отдельного субъекта включает в себя информацию распознавания индивидуума, обозначающую результат распознавания индивидуума для каждого детектированного отдельного субъекта.
Кроме того, алгоритм обработки индивидуального распознавания не ограничен чем-либо конкретным в данном варианте воплощения, как в способе детектирования лица.
Затем модуль 211 детектирования субъекта получает информацию, включающую в себя набор записанной выше информации детектирования отдельного субъекта, в качестве информации детектированного субъекта. Например, модуль 211 детектирования субъекта передает информацию о детектированном субъекте в модуль 212 обработки определения конфигурации изображения, вместе с данными снятого изображения, снятыми им самим.
Обработка детектирования субъекта, выполняемая модулем 211 детектирования субъекта, может быть реализована как обработка сигнала изображения. Например, когда обработка сигнала изображения выполняется с помощью DSP (ЦПС, цифрового процессора сигналов), обработка детектирования субъекта может быть реализована с помощью программы и инструкций, заданных в ЦПС.
Модуль 212 обработки определения конфигурации изображения определяет соответствующую конфигурацию изображения, соответствующую содержанию изображения данных снятого изображения, используя данные снятого изображения и информацию детектированного субъекта, переданную из модуля 211 детектирования субъекта, и выполняет управление получением конфигурации изображения на основе результата определения.
Таким образом, как и в описанном выше случае операции, выполняемой блоком 62 определения конфигурации изображения, показанным на фиг.9, модуль 212 обработки определения конфигурации изображения управляет и предоставляет инструкции в блок 63 управления панорамной съемкой/наклоном/степенью увеличения для получения композиции и угла обзора съемки в соответствии с результатом определения на основе результата определения конфигурации изображения.
Кроме того, модуль 212 обработки определения конфигурации изображения отслеживает содержание изображения для снятых данных изображения и ожидает получения содержания изображения, соответствующего определенной соответствующей конфигурации изображения во время управления получением конфигурации изображения. Затем, при распознавании, что было получено содержание изображения, имеющего определенную конфигурацию изображения, модуль 212 обработки определения конфигурации изображения передает инструкцию в блок 61 съемки/записи для записи данных снятого изображения.
В соответствии с инструкцией, блок 61 съемки/записи записывает данные снятого изображения, полученные в это время. Данные снятого изображения, записанные таким образом, имеют содержание изображения, соответствующее конфигурации изображения, определенной модулем 212 обработки определения конфигурации изображения.
Далее приведено описание соответствия между структурой системы формирования изображения, показанной на фиг.9 и 10, и структурой цифровой фотокамеры 1 и головки 10 панорамирования/наклона, показанной на фиг.7 и 8. Описанное здесь соответствие следует интерпретировать как пример нормальных возможностей, и другое соответствие, кроме описанного здесь, также может быть принято.
Блок 61 съемки/записи в цифровой фотокамере 1, показанной на фиг.9 и 10, соответствует части, включающей в себя модуль 21 оптической системы, датчик 22 изображения, А/Ц преобразователь 23, модуль 24 обработки сигнала, модуль 25 кодирования/декодирования и контроллер 26 носителя, показанный, например, на фиг.7. Данные снятого изображения, используемые в процессе определения конфигурации изображения блоком 62 определения конфигурации изображения, могут быть получены, например, на заданном этапе обработки сигнала в модуле 24 обработки сигнала.
Блок 62 определения конфигурации изображения в цифровой фотокамере 1, показанной на фиг.9 и 10, соответствует функции обработки сигнала, соответствующей заданной обработке в модуле 211 детектирования субъекта, в модуле 24 обработки сигнала, показанной, например, на фиг.7. Кроме того, блок 62 определения конфигурации изображения соответствует функции обработки, которая соответствует модулю 212 обработки определения конфигурации изображения и функции управления информацией предыстории съемки в модуле 213 содержания информации предыстории съемки, выполняемом модулем 27 управления (ЦПУ). В качестве области сохранения, используемой как модуль 213 содержания информации предыстории съемки, можно использовать ОЗУ 29 или запоминающее устройство 30 типа флэш, показанное на фиг.7.
Блок 63 управления панорамной съемкой/наклоном/степенью увеличения, показанный на фиг.9 и 10, соответствует функции обработки, выполняемой модулем 27 управления, показанным на фиг.7, для управления, например, панорамной съемкой/наклоном/степенью увеличения.
Блок 64 управления связью в цифровой фотокамере 1, показанной на фиг.9, соответствует модулю 34 связи головки панорамирования/наклона, показанной на фиг.7, и функции обработки, выполняемой модулем 27 управления для связи, с использованием, например, модуля 34 связи головки панорамирования/ наклона.
Блок 71 управления системой связи в головке 10 панорамирования/наклона, показанной на фиг.9, соответствует модулю 52 связи, показанному на фиг.8, и обработке, выполняемой модулем 51 управления, для связи с использованием модуля 52 связи.
Блок 72 управления панорамной съемкой/наклоном, показанный на фиг.9, соответствует исполнительной функции обработки, связанной с управлением панорамной съемкой/наклоном, среди обработки управления, выполняемой модулем 51 управления, показанным на фиг.8, и выводит сигналы для управления движением модуля 53 механизма панорамирования и модуля 56 механизма наклона в модуль 55 управления панорамной съемкой и модуль 58 управления наклоном, в соответствии с сигналами управления, поданными в них.
Как описано выше, в системе формирования изображения, имеющей конструкцию, показанную на фиг.9 и 10, автоматически выполняется следующая операция во время фотографирования (съемки/записи данных изображения), выполняемого с помощью цифровой фотокамеры: принимают решение (определяют) в отношении соответствующей конфигурации изображения и затем записывают снятые данные изображения для содержания изображения имеющего соответствующую конфигурацию изображения. В соответствии с этим фотографическое изображение с достаточно хорошим качеством может быть получено, даже если пользователь выполняет съемку без определения состояния соответствующих элементов формирования конфигурации изображения, включающих в себя композицию.
Кроме того, такая система устраняет необходимость выполнения съемки с удержанием фотокамеры, так чтобы все, кто присутствует на месте съемки, могли стать субъектом. Кроме того, даже если пользователь как субъект не знает о том, что он находится в пределах угла обзора фотокамеры, может быть получена фотография этого субъекта в данной области. Таким образом, улучшается возможность съемки в естественном состоянии человека на месте съемки, поэтому может быть получено множество фотографий, имеющих беспрецедентную атмосферу.
Далее со ссылкой на фиг.11 будет приведено описание самого основного правила автоматической съемки/записи в системе формирования изображения в соответствии с данным вариантом воплощения. Это соответствует обработке установки возможности записи/отсутствия возможности записи в соответствии с определением, была ли исчерпана определенная конфигурация изображения.
Данный вариант воплощения основан на том предположении, что система формирования изображения в соответствии с вариантом воплощения не снимает/не записывает данные изображения, имеющие ту же конфигурацию изображения более чем предварительно установленное максимальное количество раз съемки/записи (заданное количество раз). Приведенное ниже описание со ссылкой на фиг.11 основано на предположении, что максимальное количество раз съемки/записи установлено равным 2.
Затем модуль 212 обработки определения конфигурации изображения начинает обработку определения конфигурации изображения и выполняет управление получением конфигурации изображения таким образом, что отражается первый результат определения. В результате, получают данные снятого изображения, имеющие содержание изображения, показанное в части (а) на фиг.11. Содержание изображения, показанное здесь, имеет конфигурацию А изображения в кадре 300. Конфигурация А изображения соответствует конфигурации изображения, определенной модулем 212 обработки определения конфигурации изображения.
На этом этапе запись данных снятого изображения, имеющего конфигурацию А изображения, не была выполнена вообще. Таким образом, даже если съемку/запись выполняют в этот раз, количество раз съемки/записи не превышает описанное выше максимальное количество раз. Таким образом, в этом случае, модуль 212 обработки определения конфигурации изображения передает инструкцию в блок 61 съемки/записи для съемки/записи данных изображения в моменты времени, когда будет получено содержание изображения, показанное в части (а) на фиг.11. Таким образом, записывают данные снятого изображения, имеющие содержание изображения, показанное в части (а) на фиг.11. Такие данные снятого изображения представляют собой первые записанные данные, имеющие конфигурацию А изображения. Другими словами, первое фотоизображение, имеющее конфигурацию А изображения, будет снято/записано.
Далее, предположим, что модуль 212 обработки определения конфигурации изображения выполняет обработку определения конфигурации изображения, используя тот же алгоритм определения конфигурации изображения, определяя, таким образом, конфигурацию А изображения как соответствующую конфигурацию изображения, как и в предыдущем случае. Также предположим, что в результате управления получением конфигурации изображения в соответствии с данным результатом определения снятые данные изображения содержания изображения, имеющего конфигурацию А изображения, такую же, как и конфигурация изображения, показанная в части (а) на фиг.11, будут получены, как показано в части (b) на фиг.11.
Как описано выше, максимальное количество раз съемки/записи установлено равным 2, и, таким образом, вторая съемка/запись может быть выполнена на этот раз. Таким образом, модуль 212 обработки определения конфигурации изображения разрешает блоку 61 съемки/записи выполнить съемку/запись.
На этапе, когда вторая съемка/запись была выполнена для данных изображения содержания изображения, имеющего конфигурацию А изображения, показанную в части (b) на фиг.11, было получено максимальное количество раз (=2) съемки/записи. Что касается соответствия с фиг.3 и 4, этап, представленный в части (b) на фиг.11, на котором была выполнена съемка/запись, соответствует этапу, на котором было исчерпано использование определенной конфигурации А изображения модулем 203 использования результата определения.
Кроме того, предположим, что модуль 212 обработки определения конфигурации изображения выполняет обработку определения конфигурации изображения, используя тот же алгоритм конфигурации изображения, с определением после этого, что конфигурация изображения представляет собой соответствующую конфигурацию изображения, как и в предыдущем случае. Кроме того, предположим, что в результате управления получением конфигурации изображения в соответствии с данным результатом определения будут получены снятые данные изображения, имеющие то же содержание изображения, как показано в частях (а) и (b) на фиг.11, как представлено в части (с) на фиг.11.
На этом этапе конфигурация А изображения была исчерпана, как описано выше. Другими словами, поскольку данные снятого изображения, имеющие конфигурацию А изображения, были записаны дважды, еще одна запись приводит к количеству записей, равному 3, что превышает максимальное количество раз съемки/записи, равное 2.
Поэтому в это время модуль 212 обработки определения конфигурации изображения не передает инструкцию в блок 61 съемки/записи на выполнение съемки/записи. Таким образом, съемка/запись, выполняемая блоком 61 съемки/записи, не выполняется. Кроме того, даже если данные изображения, имеющие конфигурацию А изображения, будут получены после этого при определении конфигурации изображения, съемка/запись не будут выполнены.
Как описано выше, система формирования изображения в соответствии с данным вариантом воплощения имеет основную структуру, которая не выполняет запись данных снятого изображения, имеющих содержание изображения с той же конфигурацией изображения, более чем заданное максимальное количество раз съемки/записи (результат определения исчерпанной конфигурации изображения больше не используется). Таким образом, путем ограничения количества раз съемки/записи одной конфигурации изображения можно предотвратить избыточную запись изображений, имеющих одну и ту же конфигурацию изображения во время автоматической съемки/записи данных изображения, имеющих содержание изображения в соответствии с определенной соответствующей конфигурацией изображения.
Например, содержание изображения зависит от состояния определенного элемента, такого как положение панорамирования/наклона, положение субъекта в кадре, ориентация субъекта в кадре, и каждого отдельного человека как субъекта в кадре.
В данном варианте выполнения комбинация (конфигурация) состояний соответствующих элементов, определяющих содержание изображения, называется конфигурацией изображения. Каждый элемент, определяющий содержание изображения, можно рассматривать как элемент, формирующий (определяющий) конфигурацию изображения, и, таким образом, называется конфигурацией элементом формирования конфигурации изображения (элементом определения конфигурации изображения).
Далее приведено описание примеров элемента, формирующего конфигурацию изображения и примеров автоматической съемки/записи на основе определения конфигурации изображения, которая может быть принята в системе формирования изображения в соответствии с данным вариантом воплощения.
На фиг.12 концептуально иллюстрируются примеры операции автоматической съемки/записи в системе формирования изображения в случае, когда положения панорамирования и наклона, установленные модулем 53 механизма панорамирования и модулем 56 механизма наклона в головке 10 панорамирования/наклона, используются как элемент формирования конфигурации изображения. Здесь для упрощения описания описание приведено только к направлениям панорамирования.
На фиг.12, в части (а) показана головка 10 панорамирования/наклона и цифровая фотокамера 1, закрепленная на ней, в виде сверху. На этом чертеже цифровая фотокамера 1 размещена в положении, установленном как опорное (опорное положение: например, центральное положение в диапазоне перемещения) в диапазоне перемещения в направлениях панорамирования (горизонтальные направления) модуля 53 механизма панорамирования головки 10 панорамирования/наклона. Опорная линия L совпадает с или параллельна оптической оси (оптическая ось формирования изображения) модуля 3 объектива (модуля 21 оптической системы) в состоянии, когда цифровая фотокамера 1 установлена в опорном положении в направлении панорамирования.
Здесь угол обзора (угол увеличения) выражен как центр угла обзора angC, левый край угла обзора angL и правый край угла обзора angR. Центр угла обзора angC совпадает с оптической осью формирования изображения цифровой фотокамеры 1. Угол между центром угла обзора angC и левым краем угла обзора angL равен углу между центром угла обзора angC и правым краем угла обзора angR. Для упрощения описания предполагается, что угол обзора (угол увеличения) здесь фиксирован.
Кроме того, предположим, что субъект присутствует в определенном положении с передней правой стороны цифровой фотокамеры 1 рядом с положением, где размещены цифровая фотокамера 1 и головка 10 панорамирования/наклона, как показано на фиг.12. Для удобства описания предположим, что субъект не движется, и его абсолютное положение фиксировано.
Например, предположим, что цифровая фотокамера 1 в данном варианте воплощения начинает поиск субъекта в состоянии, показанном в части (а) на фиг.12, и выполняет управление панорамной съемкой, связанное с определением конфигурации изображения и управлением получения конфигурации изображения. В результате получают изображение, в котором субъект расположен в пределах угла обзора съемки, как соответствующую конфигурацию изображения, как показано в части (b) на фиг.12. В состоянии, показанном в части (b) на фиг.12, положение панорамирования обозначено как угол α° (угол между опорной линией и центром угла обзора).
Затем предположим, что цифровая фотокамера 1 снимает/записывает данные изображения в таком положении панорамирования такое количество раз, которое соответствует заданному максимальному количеству раз съемки/записи.
Затем предположим, что после того, как данные изображения в состоянии, показанном в части (b) на фиг.12, были сняты/записаны максимальное количество раз, снова выполняется обработка поиска субъекта и определения конфигурации изображения. Затем предположим, что выполняют управление получения конфигурации изображения в соответствии с результатом определения, таким образом, что получают положение панорамирования на основе угла β° панорамирования, которое отличается от угла, представленного в части (b) на фиг.12, как показано в части (с) на фиг.12. В положении, показанном в части (с) на фиг.12, цифровая фотокамера 1 может выполнить съемку/запись.
Кроме того, предположим, что в состоянии, показанном в части (с) на фиг.12, выполняют обработку поиска субъекта и определение конфигурации изображения и выполняют управление получением конфигурации изображения в соответствии с результатом определения, в результате чего получают положение панорамирования в состоянии, показанном в части (d) на фиг.12.
Однако положение панорамирования, представленное в части (d) на фиг.12, соответствует углу α° панорамирования, как в части (b) на фиг.12. На этапе, показанном в части (b) на фиг.12, было получено максимальное количество раз съемки/записи. Поэтому съемка/запись не выполняется в состоянии, полученном на этапе, показанном в части (d) на фиг.12.
В данном варианте воплощения описанная выше автоматическая съемка/запись в положении панорамирования фактически выполняется на основе угла обзора съемки, определенного по комбинации положений панорамирования и наклона. Таким образом, в множестве положений панорамирования и положений наклона, полученных в результате множества раз выполнения процесса определения конфигурации изображения и управления получением конфигурации изображения, может быть сформирована отличающаяся конфигурация изображения, если, например, положение наклона будет отличаться, даже если положение панорамирования останется тем же.
Таким образом, в соответствии с данным вариантом воплощения, положение панорамирования/наклона принимают как элемент формирования конфигурации изображения. Если съемка/запись в одном и том же положении панорамирования/наклона будет выполнена максимальное количество раз, тогда съемку/запись в этом положении панорамирования/наклона больше не выполняют.
Когда используется система формирования изображения в соответствии с данным вариантом воплощения, цифровую фотокамеру 1 помещают в определенное положение, когда она установлена на головке 10 панорамирования/наклона. Таким образом, фоновое изображение кадра снимаемого изображения остается тем же самым, если положение панорамирования/наклона будет оставаться тем же.
Таким образом, в результате ограничения количества раз съемки/записи в одном и том же положении панорамирования/наклона, которое представляет собой элемент формирования конфигурации изображения, можно предотвратить избыточную съемку/запись изображения, имеющего одно и то же фоновое изображение.
Как описано выше, в процессе детектирования субъекта в соответствии с данным вариантом воплощения выполняют обработку индивидуального распознавания в каждом из детектированных индивидуальных субъектах, и, таким образом, каждого субъекта и каждого индивидуума можно идентифицировать, ассоциируя их друг с другом. Таким образом, информацию индивидуума для каждого субъекта, определяемого в процессе индивидуального распознавания, используют как элемент формирования конфигурации изображения в данном варианте воплощения. В соответствии с этим, даже когда субъект, который представляет собой того же человека, будет размещен в кадре с той же композицией, конфигурация изображения в кадре может быть определена как отличающаяся, если данный человек будет другим человеком.
На фиг.13 иллюстрируется пример процесса определения конфигурации изображения и автоматической съемки/записи в случае, когда результат распознавания индивидуума (параметры индивидуальных особенностей), в основном, принят как элемент формирования конфигурации изображения.
Вначале предположим, что конфигурация изображения в соответствии с содержанием изображения для данных снятого изображения, представленных в части (а) на фиг.13, определена как соответствующая. В изображении, показанном в части (а) на фиг.13, состояние, в котором "субъект" представляет собой А, определено как соответствующее, в отношении элемента, формирующего конфигурацию изображения, для результата индивидуального распознавания. Субъекта А можно отличить от другого субъекта с использованием индивидуального распознавания, выполняемого при детектировании субъекта.
В системе формирования изображения предположим, что данные изображения для содержания изображения, имеющего конфигурацию изображения, представленную в части (а) на фиг.13, сняли/записали максимальное количество раз. В этом случае данные изображения, имеющие конфигурацию изображения, показанную в части (b) на фиг.13, которая совпадает представленной в части (а) на фиг.13, присутствует только субъект А, больше не снимают/не записывают.
Затем предположим, что содержание снятого изображения изменяется с состояния, представленного в части (b) на фиг.13, на состояние, показанное в части (с) на фиг.13, где только субъект В, который отличается от субъекта А, присутствует в кадре 300. Субъект В представляет субъекта, распознанного с помощью процесса индивидуального распознавания как индивидуум, отличающийся от субъекта А.
В соответствии с таким изменением определяют состояние, в котором "субъект В" составляет соответствующую конфигурацию изображения в соответствии с результатом индивидуального распознавания. В этом случае, когда количество субъектов равно одному, изображение, показанное в части (а) или (b) на фиг.13, где присутствует только субъект А, определяют как имеющее конфигурацию изображения, отличающуюся от изображения, показанного в части (с) на фиг.13, где присутствует только субъект В. Поэтому цифровая фотокамера 1 может снимать данные изображения, имеющие содержание изображения, показанное в части (с) на фиг.13, в пределах заданного максимального количества раз съемки/записи.
С другой стороны, предположим, что содержание снимаемого изображения изменяется из состояния, показанного в части (b) на фиг.13, до состояния, показанного в части (d) на фиг.13, где два субъекта А и В присутствуют в кадре. В соответствии с этим изменением, состояние, где "субъекты представляют собой А и В", определяют как соответствующее в отношении результата индивидуального распознавания, как результат определения соответствующей конфигурации изображения на основе содержания изображения, представленного в части (d) на фиг.13. Соответствующая конфигурация изображения, определенная в соответствии с содержанием изображения, представленным в части (d) на фиг.13, также отличается от конфигурации изображения, показанной в части (b) на фиг.13. Поэтому цифровая фотокамера 1 может снимать данные изображения, имеющие содержание изображения, показанное в части (d) на фиг.13, в диапазоне в пределах максимального количества раз съемки/записи.
Таким образом, можно исключить избыточную съемку/запись путем определения конфигурации изображения для изображений с теми же конкретными лицами или изображения с комбинацией из множества одних и тех же людей.
В процессе детектирования субъекта, выполняемом модулем 211 детектирования субъекта, в соответствии с данным вариантом воплощения, можно детектировать выражение лица детектируемого человека в качестве субъекта, например, улыбается ли этот субъект.
На фиг.14 иллюстрируется пример процесса определения конфигурации изображения и автоматической съемки/записи в случае, когда результат детектирования улыбки принят как элемент формирования конфигурации изображения.
Вначале предположим, что было получено содержание изображения, представленное в части (а) на фиг.14. В содержании изображения, представленном в части (а) на фиг.14, два субъекта 1 и 2 помещены справа и слева в кадре 300 снятого изображения. Что касается улыбки (выражение), субъект 1 улыбается, в то время как субъект 2 не улыбается.
Например, в результате выполнения определения конфигурации изображения для данного изображения состояние, в котором "субъект 1 улыбается, в то время как субъект 2 не улыбается", определяют как соответствующее в отношении улыбки, и, таким образом, изображение, представленное в части (а) на фиг.14, снимают/записывают максимальное количество раз. После этого, даже если будет получена такая комбинация, как показана в части (а) на фиг.14, тех же субъектов и улыбки, как представлено в части (b) на фиг.14, данные изображения для этого изображения не будут сняты/записаны.
Затем предположим, что содержание изображения изменяется на представленное в части (с) на фиг.14: субъект 1 не улыбается, в то время, как субъект 2 улыбается. В соответствии с таким изменением состояние, в котором "субъект 1 не улыбается, в то время как субъект 2 улыбается", установлено как соответствующее, как параметр улыбки в определяемой соответствующей конфигурации изображения. Конфигурация изображения, показанная в части (с) на фиг.14, отличается от представленной в частях (а) или (b) на фиг.14. Таким образом, изображение, имеющее содержание изображения, представленное в части (с) на фиг.14, может быть снято/записано заданное установленное максимальное количество раз.
Кроме того, предположим, что изображение меняется из состояния, показанного в части (с) на фиг.14, на состояние, представленное в части (d) на фиг.14, где оба субъекта 1 и 2 улыбаются. Соответствующая конфигурация изображения, определенная в этот раз, представляет собой "субъект 1 улыбается и субъект 2 улыбается". Конфигурация изображения, представленная в части (d) на фиг.14, отличается от любой из конфигураций изображения, показанных в частях (а), (b) и (с) на фиг.14. Таким образом, изображение, имеющее содержание изображения, представленное в части (d) на фиг.14, может быть снято/записано заданное максимальное количество раз.
Таким образом, когда результат детектирования улыбки в отношении выражения будет принят как элемент формирования конфигурации изображения, можно предотвратить избыточную съемку/запись изображений с тем же выражением.
При детектировании выражения сердитое лицо или плачущее лицо можно детектировать вместо улыбающегося лица, и такое детектированное выражение можно принять как элемент формирования конфигурации изображения.
На фиг.15 иллюстрируется пример процесса определения конфигурации изображения и автоматической съемки/записи в случае, когда положение субъекта в кадре принято как элемент формирования конфигурации изображения. Информация положения субъекта может быть получена в процессе детектирования субъекта, выполняемом модулем 211 детектирования субъекта.
Здесь, как показано в части (а) на фиг.15, предположим, что были получены данные снятого изображения, имеющие содержание изображения, в котором субъект расположен с левой стороны от центра в горизонтальном направлении в кадре 300.
В этом случае, цифровая фотокамера 1 в соответствии с данным вариантом воплощения определяет, что содержание изображения, показанное в части (а) на фиг.15, имеет соответствующую конфигурацию изображения. Таким образом, система формирования изображения может записывать данные снятого изображения, имеющие содержание изображения, представленное в части (а) на фиг.15, заданное максимальное количество раз.
Также предположим, что после того, как изображение, имеющее содержание изображения, представленное в части (а) на фиг.15, было записано максимальное количество раз, было получено изображение, показанное в части (b) на фиг.15, где субъект находится в том же положении, что и в части (а) на фиг.15. Однако конфигурации изображения, показанные в частях (а) и (b) на фиг.15, определены как одинаковые, и, таким образом, изображение, показанное в части (b) на фиг.15, не будет записано.
Затем предположим, что содержание изображения изменяется после этого на представленное в части (с) на фиг.15.
В содержании изображения, показанном в части (с) на фиг.15, субъект расположен справа от центра в кадре 300. Например, если положение, соответствующее части (с) на фиг.15, будет определено как ответствующее, как положение субъекта в соответствующей конфигурации изображения, определенной в этот раз, конфигурация изображения, представленная в части (с) на фиг.15, отличается от той, которая представлена в части (а) или (b) на фиг.15. Таким образом, цифровая фотокамера 1 может записывать данные снятого изображения, представленные в части (с) на фиг.15, заданное максимальное количество раз.
Таким образом, принимая информацию положения субъекта как элемент формирования конфигурации изображения, можно предотвратить избыточную съемку изображения субъекта в одном и том же положении в кадре.
Кроме того, в процессе детектирования субъекта, выполняемом модулем 211 детектирования субъекта, в соответствии с данным вариантом воплощения, может быть детектирована ориентация лица субъекта, детектированного в изображении (детектирование ориентации лица).
На фиг.16 иллюстрируется пример процесса определения конфигурации изображения и автоматической съемки/записи в случае, когда ориентация лица субъекта, детектируемая с помощью описанной выше ориентации детектирования лица, принята как элемент формирования конфигурации изображения.
В части (а) на фиг.16 иллюстрируется содержание изображения, в котором лицо субъекта в кадре 300 ориентировано направо (ориентация, рассматриваемая со стороны наблюдателя изображения). Например, если состояние "ориентировано направо" будет определено как соответствующее ориентации лица субъекта, как результат определения конфигурации изображения, в соответствии с содержанием изображения, представленным в части (а) на фиг.16, данные снятого изображения, имеющие содержание изображения, представленное в части (а) на фиг.16, можно записать заданное максимальное количество раз.
После того, как данные снятого изображения будут записаны максимальное количество раз, если тот же результат определения конфигурации изображения будет получен для изображения, представленного в части (b) на фиг.16, где лицо субъекта ориентировано направо, как в части (а) на фиг.16, изображение, показанное в части (b) на фиг.16, не будет снято/записано, поскольку конфигурации изображения, показанные в частях (а) и (b) на фиг.16, будут определены как одинаковые.
С другой стороны, предположим, что содержание изображения после этого меняется на представленное в части (с) на фиг.16.
В содержании изображения, показанном в части (с) на фиг.16, субъект ориентирован налево. Если состояние "ориентирован налево" будет определено как соответствующее ориентации лица в ходе определения конфигурации изображения в соответствии с содержанием изображения, представленным в части (с) на фиг.16, конфигурация изображения, показанная в части (с) на фиг.16, будет отличаться от показанной в части (а) или (b) на фиг.16. Таким образом, снятые данные изображения, имеющие содержание изображения, показанное в части (с) на фиг.16, могут быть записаны заданное максимальное количество раз.
В соответствии с этим можно предотвратить избыточную съемку/запись изображения субъекта как человека с той же самой ориентацией.
На фиг.17 иллюстрируется пример процесса определения конфигурации изображения и автоматической съемки/записи в случае, когда количество субъектов, присутствующих в кадре, принято как элемент формирования конфигурации изображения.
Информация о количестве субъектов может быть получена в процессе детектирования субъекта, выполняемом модулем 211 детектирования субъекта.
Вначале, как показано в части (а) на фиг.17, предположим, что было получено снятое изображение, в котором субъект присутствует в кадре 300. Кроме того, предположим, что результат определения конфигурации изображения, обозначающий, что количество субъектов, равное "1", является соответствующим, был получен на основе содержания изображения. Затем предположим, что данные снятого изображения, имеющие содержание изображения, представленное в части (а) на фиг.17, записано заданное максимальное количество раз.
После этого, если изображение, в котором количество субъектов равно одному, как показано в части (а) на фиг.17, будет получено, как представлено в части (b) на фиг.17, изображение, показанное в части (b) на фиг.17, не будет снято/записано, поскольку конфигурации изображения, показанные в частях (а) и (b) на фиг.17, определены как одинаковые.
Затем предположим, что содержание изображения меняется на содержание изображения, в котором количество субъектов в кадре равно двум, как представлено в части (с) на фиг.17. Такое содержание изображения имеет конфигурацию изображения, отличающуюся от представленной в частях (а) или (b) на фиг.17, где количество субъектов равно одному, в отношении такого элемента формирования конфигурации изображения, как количество субъектов. Таким образом, если содержание изображения, представленное в части (с) на фиг.17, определено как соответствующее конфигурации изображения, его данные снятого изображения могут быть записаны заданное максимальное количество раз.
Таким образом, используя количество субъектов как элемент формирования конфигурации изображения, можно предотвратить избыточную съемку/запись изображений, имеющих одно и то же количество субъектов.
На фиг.18 иллюстрируется пример процесса определения конфигурации изображения и автоматической съемки/записи в случае, когда размер субъекта в кадре принят как элемент формирования конфигурации изображения. Информация о размере субъекта может быть получена в процессе детектирования субъекта, выполняемом модулем 211 детектирования субъекта.
Вначале предположим, что было получено снятое изображение, в котором субъект присутствует в кадре 300, как представлено в части (а) на фиг.18.
Кроме того, предположим, что результат, обозначающий состояние, в котором размер субъекта представляет собой "V1 (вертикальный размер)", является соответствующим, был получен в процессе определения конфигурации изображения на основе содержания изображения. Затем предположим, что управление получением конфигурации изображения (например, управление степенью увеличения) выполняют так, чтобы размер субъекта был более точно установлен равным V1, в соответствии с необходимостью, и что данные снятого изображения, имеющие содержание изображения, представленное в части (а) на фиг.18, записаны заданное максимальное количество раз.
После того, если изображение, имеющее субъект того же размера, что и в части (а) на фиг.18, будет получено, как представлено в части (b) на фиг.18, изображение, показанное в части (b) на фиг.18, не будет снято/записано, поскольку конфигурации изображений, представленные в частях (а) и (b) на фиг.18, будут определены как одинаковые.
С другой стороны, предположим, что фактически присутствующий человек как субъект приближается к цифровой фотокамере 1 и что изображение меняется на представленное в части (с) на фиг.18, где размер субъекта больше, чем в частях (а) и (b) на фиг.18.
Затем предположим, что размер субъекта (вертикальный размер равен "V2 (V2>V1)") определен как соответствующий в соответствующей конфигурации изображения, определенной на основе содержания изображения. В соответствии с таким результатом определения конфигурации изображения выполняют управление получением конфигурации изображения (например, управление степенью увеличения), по мере необходимости, так, чтобы размер субъекта был более точно установлен равным V2, и затем данные снятого изображения, имеющие содержание изображения, представленное в части (с) на фиг.18, могут быть записаны заданное максимальное количество раз.
Таким образом, используя размер субъекта как элемент формирования конфигурации изображения, может быть предотвращена избыточная съемка/запись изображения субъекта, имеющего тот же размер в кадре.
В системе формирования изображения, в соответствии с данным вариантом воплощения, обработка, описанная выше со ссылкой на фиг.4, может быть применена в качестве основной структуры.
Таким образом, в случае, когда определенная соответствующая конфигурация изображения будет исчерпана, то есть в случае, когда будет получено максимальное количество раз съемки/записи, последующий процесс определения конфигурации изображения может продолжаться путем изменения алгоритма определения конфигурации изображения. В соответствии с этим изображения, имеющие различные соответствующие конфигурации изображения, могут быть сняты/записаны, даже если не произойдет какое-либо существенное изменение в окружающей среде системы формирования изображения.
Теперь описание приведено в отношении некоторых примеров изменения алгоритма определения конфигурации изображения в системе формирования изображения данного варианта воплощения.
На фиг.19 иллюстрируется первый пример изменения алгоритма определения конфигурации изображения.
Вначале, в части (а) на фиг.19 иллюстрируется содержание изображения для изображения, полученного на основе соответствующей конфигурации изображения, определенной по первому алгоритму определения конфигурации изображения. Здесь предположим, что размер субъекта в данном изображении представляет собой V1 и что значение коэффициента увеличения изображения, установленное в данное время, составляет Z1.
Здесь предположим, что изображение, имеющее содержание изображения, показанное в части (а) на фиг.19, было снято/записано максимальное количество раз.
После этого, даже если изображение, показанное в части (а) на фиг.19, будет получено в соответствии с первым алгоритмом определения конфигурации изображения, это изображение не будет снято/записано.
Таким образом, в данном случае параметр размера субъекта, формирующего соответствующую конфигурацию изображения, меняется как алгоритм определения конфигурации изображения. Здесь параметр изменяется путем умножения размера субъекта, установленного в первом алгоритме определения конфигурации изображения, на "а".
В соответствии с этим, изображение, снятое с коэффициентом увеличения Z1xa, может быть получено в соответствии с управлением получением конфигурации изображения, в соответствии с результатом определения конфигурации изображения. В этом изображении размер субъекта в кадре 300 увеличивается до V1xa, как представлено в части (b) на фиг.19.
В соответствии с этим, размер субъекта отличается от представленного в части (а) на фиг.19, так, что получается разная конфигурация изображения. После этого, цифровая фотокамера 1 может записывать данные снятого изображения, имеющие содержание изображения, показанное в части (b) на фиг.19, заданное максимальное количество раз.
В описанном выше примере параметр изменяется для увеличения размера субъекта в соответствии с изменением алгоритма определения конфигурации изображения. В качестве альтернативы, параметр можно изменять для учета уменьшения размера субъекта.
На фиг.20 показан второй пример изменения алгоритма определения конфигурации изображения.
Например, в части (а) на фиг.20 иллюстрируется содержание снятого изображения, полученного с помощью управления получением конфигурации изображения на основе алгоритма определения первой конфигурации изображения. Когда внимание сфокусировано на положении субъекта в данном изображении, субъект присутствует в положении, когда перпендикуляр проходит через половину горизонтального размера Н кадра 300, то есть почти в центре горизонтального направления кадра. Таким образом, в соответствующей конфигурации изображения, определенной в это время, состояние, когда субъект расположен в "центре в горизонтальном направлении", указано как соответствующее.
Затем предположим, что изображение, имеющее содержание изображения с получением положения субъекта, полученного в части (а) на фиг.20, снято/записано максимальное количество раз.
После того как изображение, имеющее содержание изображения с положением субъекта, представленным в части (а) на фиг.20, будет снято/записано максимальное количество раз, изображение, имеющее конфигурацию изображения, показанную в части (а) на фиг.20, не будет больше снято/записано. Таким образом, положение субъекта в кадре изменяется на основе второго алгоритма определения конфигурации изображения.
В части (b) на фиг.20 представлено снятое изображение, полученное путем управления получением конфигурации изображения на основе второго алгоритма определения конфигурации изображения. На этой фигуре субъект расположен на левой виртуальной линии среди виртуальных линий, разделяющих кадр в горизонтальном направлении на три части. Таким образом, в данном алгоритме определения конфигурации изображения состояние, в котором субъект расположен в "положении на левой виртуальной линии среди виртуальных линий, разделяющих кадр в горизонтальном направлении на три части", установлено как соответствующее.
Таким образом, путем выполнения определения конфигурации изображения и управления получением конфигурации изображения, путем изменения положения субъекта, которое задано как алгоритм определения конфигурации изображения, может быть получено снятое изображение с другим положением субъекта. Затем изображение, имеющее содержание изображения с положением субъекта, представленным в части (b) на фиг.20, может быть снято/записано максимальное количество раз.
Кроме того, после того, как изображение, имеющее содержание изображения с положением субъекта, представленным в части (b) на фиг.20, может быть снято/записано максимальное количество раз, изображение, имеющее конфигурацию изображения, показанную в части (b) на фиг.20, больше не будет снято/записано.
Таким образом, второй алгоритм определения конфигурации изображения изменяется на третий алгоритм определения конфигурации изображения, то есть устанавливают параметр положения субъекта, отличающийся от параметров в алгоритмах определения первой и второй конфигураций изображения.
В части (с) в фиг.20 представлено снятое изображение, полученное в результате процесса определения конфигурации изображения на основе третьего алгоритма определения конфигурации изображения. На этой фигуре субъект расположен на правой виртуальной линии среди виртуальных линий, разделяющих кадр в горизонтальном направлении на три части. Таким образом, в алгоритме определения конфигурации изображения, в данном случае, "положение на правой виртуальной линии среди виртуальных линий, разделяющих кадр в горизонтальном направлении на три части", установлено как соответствующее положение субъекта.
Затем изображение, имеющее содержание изображения с положением субъекта, представленным в части (с) на фиг.20, может быть снято/записано максимальное количество раз.
Как можно понять из приведенного выше описания, со ссылкой на фиг.20, алгоритм определения конфигурации изображения может быть изменен множество раз в данном варианте воплощения.
Кроме того, положение субъекта может по-разному изменяться в другой структуре, чем представлено на фиг.20.
На фиг.21 иллюстрируется третий пример изменения алгоритма определения конфигурации изображения.
Вначале предположим, что снятое изображение, представленное в части (а) на фиг.21, было получено при управлении получением конфигурации изображения на основе первого алгоритма определения конфигурации изображения. В содержании изображения, представленном в части (а) на фиг.21, два субъекта 1 и 2 присутствуют в кадре 300. В горизонтальном направлении кадра субъект 1 расположен слева, тогда как субъект 2 расположен справа.
Предположим, что цифровая фотокамера 1 снимает/записывает данные изображения, имеющие содержание изображения, представленное в части (а) на фиг.21, максимальное количество раз, в соответствии с первым алгоритмом определения конфигурации изображения.
В соответствии с результатом определения конфигурации изображения на основе данного алгоритма определения конфигурации изображения состояние "субъекты 1 и 2 присутствуют" указано как соответствующее на основе состояния, в котором были детектированы два субъекта 1 и 2. Кроме того, состояние, в котором "субъект 1 имеет размер V11, тогда как субъект 2 имеет размер V12", указано как соответствующее.
Затем предположим, что данные снятого изображения, имеющие конфигурацию изображения, в которой присутствуют оба субъекта 1 и 2, было получено как часть (а) на фиг.21. Однако данные снятого изображения этого содержания изображения не записывают, и обработка определения конфигурации изображения выполняется путем использования второго алгоритма определения конфигурации изображения. В части (b) на фиг.21 иллюстрируется содержание изображения для снятого изображения, полученного в результате обработки определения конфигурации изображения на основе второго алгоритма определения конфигурации изображения.
В части (b) на фиг.21 присутствует только субъект 1 среди субъектов 1 и 2 в кадре 300, и субъект 1 имеет заданный размер V21 субъекта, который больше, чем размер субъекта в части (а) на фиг.21.
Таким образом, во втором алгоритме определения конфигурации изображения состояние, в котором присутствует "только субъект 1", определено как соответствующее, даже если в кадре детектируют субъекты 1 и 2. Кроме того, размер "V21", больший, чем V11, указан как соответствующий в соответствии с одним субъектом 1.
Затем изображение, имеющее конфигурацию изображения, показанную в части (b) на фиг.21, снимают/записывают максимальное количество раз, таким образом, что данные изображения, имеющие конфигурацию изображения, показанную в части (b) на фиг.21, больше не снимают/записывают. В соответствии с этим, алгоритм определения конфигурации изображения изменяется на третий алгоритм определения конфигурации изображения.
В третьем алгоритме определения конфигурации изображения состояние, в котором присутствует "только 2 субъекта", а не субъект 1, указано как соответствующее. Что касается размера, "V21" указан как соответствующий.
Пример перехода содержания изображения снятого изображения, полученного в процессе определения конфигурации изображения, и под управлением получения конфигурации изображения на основе третьего алгоритма определения конфигурации изображения, показан в частях (с) и (d) на фиг.21.
Здесь предположим, что субъекты 1 и 2 детектированы как полученные в результате поиска субъекта при обработке в соответствии с третьим алгоритмом определения конфигурации изображения, как показано в части (с) на фиг.21. Содержание изображения, показанное в части (с) на фиг.21, то же, что показано в части (а) на фиг.21. В это время, однако, алгоритм определения конфигурации изображения уже был изменен на третий алгоритм определения конфигурации изображения, и, таким образом, снятое изображение, показанное в части (с) на фиг.21, не будет записано.
Вместо этого выполняют управление получением конфигурации изображения для получения содержания изображения, в котором в кадре присутствует только субъект 2, и субъект 2 имеет размер субъекта V21 в соответствии с третьим алгоритмом определения конфигурации изображения. В результате получают изображение, имеющее содержание изображения, показанное в части (d) на фиг.21. Цифровая фотокамера 1 может выполнять максимальное количество раз съемки/записи данных изображения, имеющих содержание изображения, полученное таким образом.
На фиг.22 иллюстрируется четвертый пример изменения алгоритма определения конфигурации изображения.
Вначале предположим, что снятое изображение, показанное в части (а) на фиг.22, получено при управлении получением конфигурации изображения на основе первого алгоритма определения конфигурации изображения. Таким образом, в данном случае состояние, в котором "присутствует субъект 1", указано как соответствующее.
Кроме того, предположим, что цифровая фотокамера 1 выполнила максимальное количество раз съемку/запись данных изображения, имеющих содержание изображения, показанное в части (а) на фиг.22.
Затем предположим, что содержание изображения, в котором субъекты 1 и 2 присутствуют в кадре, было получено, как показано в части (b) на фиг.22, в результате поиска субъекта.
Следует отметить, что в данном случае получилось так, что субъект 1 движется в левом направлении в кадре, в то время как субъект 2 движется в правом направлении в кадре, когда было получено снятое изображение, представленное в части (b) на фиг.22.
Когда детектируют такое состояние, то есть состояние, в котором направление движения субъектов после их детектирования и поиска отличаются друг от друга, алгоритм определения конфигурации изображения изменяется для получения конфигурации изображения, в котором два субъекта 1 и 2 не размещают в кадре, но в кадр помещают любой один из двух субъектов. В это время субъекта, который не был снят/записан, выбирают как субъекта, которого требуется поместить в кадр среди субъектов 1 и 2. Таким образом, в таком случае выбирают субъекта 2. При таком выборе субъектов 1 и 2 можно различать друг от друга, используя, например, результат индивидуального распознавания.
Затем система формирования изображения в данном варианте воплощения (цифровая фотокамера 1 и головка 10 панорамирования/наклона) выполняет управление направлением панорамирования как управление получением конфигурации изображения для отслеживания движения субъекта 2 в состоянии, показанном в части (b) на фиг.22. Затем предположим, что снятое изображение, показанное в части (с) на фиг.22, было получено как результат отслеживания субъекта 2. Такое снятое изображение соответствует соответствующей конфигурации изображения, определенной с помощью алгоритма определения изменения конфигурации изображения. В соответствии с этим, цифровая фотокамера 1 может снимать/записывать данные изображения, имеющие содержание изображения, показанное в части (с) на фиг.22, максимальное количество раз.
Далее приведено описание примера технической структуры для реализации автоматической съемки/записи, выполняемой системой формирования изображения в соответствии с данным вариантом воплощения, описанным выше.
Пример структуры цифровой фотокамеры 1 и головки 10 панорамирования/наклона, формирующих систему формирования изображения в соответствии с данным вариантом воплощения, был описан выше со ссылкой на фиг.7 и 8.
Ниже будет описана информация предыстории съемки, содержащаяся в модуле 213 содержания предыстории съемки.
На фиг.23 показан пример структуры информации предыстории съемки.
Информация предыстории съемки включает в себя набор частей от 1 до n информации предыстории съемки. В каждой части информации предыстории съемки содержится информация предыстории одной автоматической съемки/записи.
Каждая часть информации предыстории съемки включает в себя, как показано на фиг.23, название файла, информацию даты/времени съемки, информацию положения панорамирования/наклона, информацию о количестве субъектов, информацию индивидуального распознавания, информацию о положении в кадре, информация о размере, информацию об ориентации лица и информацию о выражении.
Название файла обозначает название файла, состоящее из данных снятого изображения, записанных в виде файла в карту 40 памяти, при соответствующей автоматической съемке/записи. В качестве альтернативы можно использовать путь файла вместо названия файла. В любом случае часть информации предыстории съемки ассоциирована с данными снятого изображения, сохраненными в карте 40 памяти, информацией названия файла или информацией пути файла.
Информация даты/времени съемки обозначает дату/время, когда была выполнена соответствующая автоматическая съемка/запись.
Информация положения панорамирования/наклона обозначает положение панорамирования/наклона, которое было установлено, когда была выполнена соответствующая автоматическая съемка/запись. Информация положения панорамирования/наклона может быть получена из блока 63 управления панорамированием/наклоном/степенью увеличения.
Информация о количестве субъектов обозначает количество субъектов (детектированных отдельных субъектов), присутствующих в изображении (кадре), соответствующих данных снятого изображения, то есть данных снятого изображения, сохраненных в карте 40 памяти в ходе соответствующей автоматической съемки/записи.
Информация индивидуального распознавания представляет собой информацию о результате индивидуального распознавания (информацию индивидуального распознавания) каждого из субъектов, присутствующих в изображении соответствующих данных снятого изображения.
Информация о положении в кадре представляет собой информацию, обозначающую положение в кадре каждого субъекта, присутствующего в изображении соответствующих данных снятого изображения. Например, информация о положении в кадре может быть выражена как положение координат точки, соответствующей центру тяжести, рассчитанному для каждого субъекта в кадре.
Информация о размере представляет собой информацию, обозначающую размер в кадре каждого субъекта, присутствующего в изображении соответствующих данных снятого изображения.
Информация об ориентации лица представляет собой информацию, обозначающую ориентацию лица, детектированную для каждого субъекта, присутствующего в изображении соответствующих данных снятого изображения.
Информация о выражении представляет собой информацию, обозначающую выражение (например, улыбку или отсутствие улыбки), детектированное для каждого субъекта, присутствующего в изображении соответствующих данных снятого изображения.
На фиг.24 и 25 иллюстрируется другой пример структуры информации предыстории съемки.
В соответствии с приведенным выше описанием информация о положении в кадре, информация о размере, информация об ориентации лица и информация о выражении представлена для каждого субъекта, присутствующего в изображении соответствующих данных снятого изображения. В этом случае, когда данные информации индивидуального распознавания, как результат обработки индивидуального распознавания, должны быть получены для каждого субъекта в этом варианте воплощения, описанная выше информация о положении в кадре, информация о размере, информация об ориентации лица и информация о выражении могут быть ассоциированы с каждым субъектом, распознанным как индивидуум (информация индивидуального распознавания). На фиг.24 и 25 показан пример структуры в случае, когда информация положения в кадре, информация о размере, информация ориентации лица и информация о выражении ассоциированы с каждым субъектом, распознанным как индивидуум.
Вначале, на фиг.24 иллюстрируется структура всей информации предыстории съемки. Таким образом, в данном примере вся структура, показанная на фиг.24, содержится вместо структуры, показанной на фиг.23.
Информация предыстории съемки, показанная на фиг.24, является той же, в том смысле, что она была сформирована из набора частей от 1 до n информации предыстории съемки. Однако информация, формирующая каждую часть информации предыстории съемки, включает в себя название файла, информацию даты/времени съемки, информацию о положении, выраженную в виде панорамирования/наклона, и информацию индивидуального распознавания.
Кроме того, информация индивидуального распознавания имеет структуру, показанную на фиг.25.
Информация индивидуального распознавания, показанная на фиг.25, сформирована как набор из частей от 1 до m информации индивидуального распознавания. Каждый модуль информации индивидуального распознавания соответствует субъекту, присутствующему в изображении соответствующих данных снятого изображения во взаимозависимости "один к одному". Таким образом, количество субъектов, присутствующих в изображении соответствующих данных снятого изображения (информация о количестве субъектов), может быть распознано на основе количества частей информации индивидуального распознавания.
Каждая часть информации индивидуального распознавания включает в себя ID (ИД, идентификатор) отдельного субъекта, параметры индивидуальных особенностей, информацию о положении внутри кадра, информацию о размере, информацию об ориентации лица и информацию о выражении.
ИД отдельного субъекта представляет собой уникальный идентификатор, задаваемый для каждого распознанного индивидуума во время обработки индивидуального распознавания. Например, если один и тот же субъект А автоматически снимают/записывают в различных обстоятельствах, ИД одного и того же отдельного субъекта, соответствующий субъекту А, сохраняют как информацию индивидуального распознавания в информации предыстории съемки, которая соответствует этой автоматической съемке/записи.
Например, в процессе индивидуального распознавания значения, полученные в соответствии с процессом распознавания, рассчитывают как заданные параметры, которые могут представлять значение индивидуальных особенностей. Значения параметров, рассчитанные таким образом, сохраняют как параметры индивидуальных особенностей.
Например, в случае определения, был ли субъект такой, как индивидуум, детектированный в текущих данных снятого изображения, уже сфотографирован/записан, параметры индивидуальных особенностей, полученные в режиме реального времени после обработки индивидуального распознавания, выполняемой для субъекта, присутствующего в текущих данных снятого изображения, можно сравнить с параметрами индивидуальных особенностей, сохраненными в информации индивидуального распознавания, в информации предыстории съемки.
Информация о положении в кадре, информация о размере, информация об ориентации лица и информация о выражении в каждом отдельном модуле информации распознавания обозначают положение в кадре, размер субъекта, ориентацию лица и выражение субъекта, такого как соответствующий индивидуум.
Ниже приведено описание с предположением, что информация предыстории съемки имеет структуру, показанную на фиг.24 и 25.
В блок-схеме последовательности операций на фиг.26 иллюстрируется первый пример процедуры обработки, выполняемой в блоке 62 определения конфигурации изображения, в соответствии с автоматической съемки/записью в системе формирования изображения, в соответствии с данным вариантом воплощения. Первый пример процедуры обработки соответствует процедуре, при которой не происходит изменение алгоритма определения конфигурации изображения, показанного на фиг.3, в соответствии с описанной выше основной структурой.
На фиг.26 модуль 211 детектирования субъекта начинает отбор данных снятого изображения на этапе S301.
На этапе S302 модуль 211 детектирования субъекта выполняет обработку детектирования субъекта, описанную выше, используя отобранные данные снятого изображения. В соответствии с этим, параметры индивидуальных особенностей распознают для каждого отдельного субъекта и детектируют положение в кадре, размер субъекта, ориентацию лица и выражение каждого отдельного субъекта. Такую обработку детектирования субъекта выполняют, например, для каждого кадра изображения или заданного количества кадров.
На этапе S303 модуль 212 определения обработки конфигурации изображения распознает индивидуума, соответствующего каждому субъекту, которого детектируют в данный момент времени, и различные условия, включающие в себя количество субъектов и размер субъекта, используя информацию детектирования субъекта и данные снятого изображения, полученные на этапе S302, и выполняет обработку определения конфигурации изображения в соответствии с заданным алгоритмом определения конфигурации изображения.
На этапе S304 модуль 212 обработки определения конфигурации изображения выполняет управление получением конфигурации изображения для получения содержания изображения данных снятого изображения, имеющих соответствующую конфигурацию изображения, определенную в процессе определения конфигурации изображения. Например, если положение субъекта и размер субъекта установлены как элементы, формирующие эту соответствующую конфигурацию изображения, модуль 212 обработки определения конфигурации изображения передает инструкцию в блок 63 управления панорамной съемкой/наклоном/степенью увеличения, для получения заданного положения субъекта и размера субъекта (управление панорамной съемкой/наклоном/степенью увеличения).
Модуль 212 обработки определения конфигурации изображения определяет, было ли получено содержание изображения, имеющее соответствующую конфигурацию изображения для данных снятого изображения, (ОК) на этапе S305, при выполнении управления получением конфигурации изображения на этапе S304. Для этого определения модуль 212 обработки определения конфигурации изображения может использовать информацию детектирования субъекта, которая может быть получена из процесса детектирования субъекта, выполняемого модулем 211 детектирования субъекта для данных снятого изображения, в которых содержание изображения изменяется в соответствии с управлением получения конфигурации изображения.
Если содержание изображения, имеющее соответствующую конфигурацию изображения, будет получено в определенный момент времени в результате выполнения управления получением конфигурации изображения, положительный результат определения будет получен на этапе S305. В этом случае обработка переходит на этап S306.
С другой стороны, если содержание изображения, имеющее соответствующую конфигурацию изображения, не будет получено в результате выполнения всех видов управления, необходимых для управления получением конфигурации изображения, отрицательный результат определения будет получен на этапе S305. В этом случае обработка возвращается на этап S302, где выполняется обработка детектирования субъекта, для поиска субъекта.
На этапе S306 модуль 212 обработки определения конфигурации изображения считывает информацию предыстории съемки из модуля 213 содержания предыстории съемки. Затем, на этапе S307, модуль 212 обработки определения конфигурации изображения сравнивает информацию предыстории съемки с результатом определения конфигурации изображения, полученным на этапе S303. Элементы информации, формирующие результат определения конфигурации изображения, в основном, включают в себя различные части информации о субъекте, определенном в качестве цели съемки, как описано ниже. Различные части информации могут представлять собой элементы информации, формирующие информацию индивидуального распознавания, показанную на фиг.25.
Кроме того, результат определения конфигурации изображения включает в себя информацию о фактическом положении панорамирования/наклона в момент времени, когда содержание изображения, имеющее соответствующую конфигурацию изображения, будет получено под управлением получения конфигурации изображения (момент времени, когда положительный результат определения будет получен на этапе S305). Информацию о положении панорамирования/наклона получают в результате управления получением конфигурации изображения на этапе S304 и, таким образом, ее можно рассматривать как элемент, формирующий результат определения конфигурации изображения.
На этапе S308 модуль 212 обработки определения конфигурации изображения определяет, была ли конфигурация изображения, полученная на этапе S303, исчерпана (исчерпана ли конфигурация изображения), на основе результата, полученного на этапе S307. Таким образом, модуль 212 обработки определения конфигурации изображения определяет, были ли данные снятого изображения для содержания изображения, имеющего конфигурацию изображения, определенную на этапе S303, сняты/записаны заданное максимальное количество раз.
Конкретный пример процедуры обработки, соответствующей этапам S307 и S308, описан ниже со ссылкой на фиг.27.
Если конфигурация изображения была исчерпана и положительный результат определения был получен на этапе S308, обработка возвращается на этап S302, где повторно начинается поиск субъекта. В таком случае, когда определенная конфигурация изображения определена как исчерпанная, снова выполняют поиск субъекта, обработку детектирования субъекта и обработку определения конфигурации изображения. В соответствии с этим, предотвращается съемка/запись более чем максимальное количество раз данных изображения, имеющих одинаковую конфигурацию изображения.
С другой стороны, если конфигурация изображения не была исчерпана и отрицательный результат определения будет получен на этапе S308, обработка переходит на этап S309.
На этапе S309 модуль 212 обработки определения конфигурации изображения выполняет обработку определения, относящуюся к моменту времени съемки/записи, и затем определяет на этапе S310, настало ли время съемки/записи (ОК) на основе результата процесса определения.
Цифровая фотокамера 1 в соответствии с данным вариантом воплощения выполнена с возможностью детектирования выражения лица детектируемого субъекта. Момент времени съемки/записи, определенный на этапе S309, относится к детектированию выражения.
Например, предположим, что соответствующее выражение, которое представляет собой один из элементов формирования конфигурации изображения, определенного детектируемого индивидуального субъекта, определяют как улыбку в результате определения конфигурации изображения, выполненного на этапе S303.
В этом случае на этапе S309 определяют, представляет ли выражение определенного детектированного индивидуального субъекта, которого в данный момент времени детектируют в режиме реального времени, улыбку. Таким образом, при управлении получением конфигурации изображения ожидают получение улыбки, которая определена как один из элементов формирования конфигурации изображения.
Затем, когда детектируют улыбку определенного детектированного отдельного субъекта в определенный момент времени, на этапе S310 получают положительный результат определения, таким образом, что обработка переходит на этап S311. С другой стороны, если улыбка определенного детектированного отдельного субъекта не будет детектирована в течение заданного периода времени, на этапе S310 получают отрицательный результат определения так, что обработка возвращается на этап S302.
На этапе S311 модуль 212 обработки определения конфигурации изображения позволяет выполнить съемку/запись. В частности, модуль 212 обработки определения конфигурации изображения передает инструкции в систему управления записью цифровой фотокамеры 1 для выполнения операции записи снятых данных изображения, полученных в этот момент времени, в карте 40 памяти, как файл неподвижного изображения.
Затем, на этапе S312, модуль 212 обработки определения конфигурации изображения вновь генерирует модуль информации предыстории съемки (фиг.24 и 25), в которой отражается результат съемки/записи в этот раз. На этапе S313 информация предыстории съемки, содержащаяся в модуле 213 содержания предыстории съемки, обновляется с использованием вновь генерируемого модуля информации предыстории съемки.
Далее будет описан конкретный пример обработки, соответствующий этапам S307 и S308 на фиг.26, со ссылкой на блок-схему последовательности операций на фиг.27. Обработка, соответствующая этапам S307 и S308, представляет собой обработку сравнения информации предыстории съемки с информацией определения конфигурации изображения и представляет собой обработку вывода в конечном итоге результата определения, обозначающего, была ли исчерпана определенная соответствующая конфигурация изображения.
На фиг.27, на этапе S401, модуль 212 обработки определения конфигурации изображения выделяет из информации предыстории съемки одну или больше частей информации предыстории съемки, имеющих информацию положения панорамирования/наклона, такую же, как и информация положения панорамирования/наклона, полученная как результат определения конфигурации изображения. Как описано выше, информация положения панорамирования/наклона, полученная как результат определения конфигурации изображения, обозначает положение панорамирования/наклона, которое фактически установлено в модуле механизма панорамирования/наклона, когда результат определения ОК был получен на этапе S305 как результат управления получением конфигурации изображения на этапе S304 на фиг.26.
Затем, на этапе S402, модуль 212 обработки определения конфигурации изображения определяет, меньше ли количество модулей информации предыстории съемки, выделенных на этапе S401 (количество выделенных модулей), чем максимальное количество раз Аmax съемки/записи, установленное в соответствии с положением панорамирования/наклона, как элемента формирования конфигурации изображения.
Получение положительного результата определения на этапе S402 означает, что максимальное количество раз Аmax съемки/записи не было достигнуто для данных снятого изображения, имеющих конфигурацию изображения, определенную на этот раз, когда внимание сфокусировано только на положении панорамирования/наклона, в качестве элемента формирования конфигурации изображения. Другими словами, съемка/запись в положении панорамирования/наклона, определенная на этот раз в качестве элемента конфигурации изображения, может быть выполнена количество раз, выраженное путем вычитания количества выделенных модулей из максимального количества раз Аmax.
Таким образом, в данном случае, обработка переходит на этап S416, где немедленно выводят результат определения, обозначающий, что конфигурация изображения, определенная на этот раз, не была исчерпана.
Этап S416 соответствует получению отрицательного результата определения, обозначающего, что конфигурация изображения не была исчерпана на этапе S308 на фиг.26.
С другой стороны, получение отрицательного результата определения на этапе S402 означает, что количество частей данных снятого изображения, записанных в том же положении панорамирования/наклона, что и в конфигурации изображения, определенной на этот раз, равно максимальному количеству раз Аmax съемки/записи. В этом случае, возможно, что конфигурация изображения, определенная на этот раз, была исчерпана.
На этом этапе, однако, не определяют, была ли выполнена съемка/запись для других элементов, формирующих конфигурацию изображения, кроме информации о положении панорамирования/наклона в конфигурации изображения, определенной на этот раз. Таким образом, обработка переходит на этап S403, где модуль 212 обработки определения конфигурации изображения определяет, была ли выполнена съемка/запись для других элементов формирования конфигурации изображения.
На этапе S403 модуль 212 обработки определения конфигурации изображения выделяет из части (частей) информации предыстории съемки, выделенных на этапе S401 (выделенная часть (части) информации предыстории съемки), одну или больше частей информации предыстории съемки, количество субъектов которых равно количеству субъектов, полученному на этот раз, как результат определения конфигурации изображения. Затем, на этапе S404, модуль 212 обработки определения конфигурации изображения определяет, не является ли количество выделенных частей меньшим, чем максимальное количество раз съемки/записи Вmax, которое установлено в соответствии с количеством субъектов.
Если положительный результат определения будет получен на этапе S404, это означает, что максимальное количество раз Вmax съемки/записи не было получено для изображения, имеющего содержание изображения, включающее в себя то же количество субъектов, что и в определенной на этот раз конфигурации изображения. Таким образом, на данном этапе изображение не была исчерпана конфигурация в отношении количества субъектов, как элемент, формирующий конфигурацию изображения. Поэтому изображение, имеющее то же количество субъектов, что и в конфигурации изображения, определенной на этот раз, может быть снято/записано количество раз, выраженное путем вычитания количества выделенных частей информации из максимального количества раз съемки/записи Вmax. Таким образом, в этом случае обработка переходит на этап S416, где выводят результат определения, обозначающий, что конфигурация изображения не была исчерпана, как и в случае получения положительного результата определения на этапе S402.
С другой стороны, если будет получен отрицательный результат определения на этапе S404, обработка переходит на этап S405, как и в случае получения отрицательного результата определения на этапе S402, то есть для определения, было ли изображение снято/записано с использованием других элементов, формирующих конфигурации изображения, кроме информации о положении панорамирования/наклона и количестве субъектов.
На этапе S405 модуль 212 обработки определения конфигурации изображения выделяет из части (частей) информации предыстории съемки, выделенных на этапе S403, одну или больше частей информации предыстории съемки, имеющих параметры индивидуальных особенностей, такие же, как и параметры индивидуальных особенностей, полученные как результат определения конфигурации изображения на этот раз. Затем, на этапе S406, модуль 212 обработки определения конфигурации изображения определяет, меньше ли количество выделенных частей, чем максимальное количество раз съемки/записи Сmax, которое было установлено в соответствии с параметрами индивидуальных особенностей.
Если на этапе S406 будет получен положительный результат определения, результат определения, обозначающий, что конфигурация изображения еще не была исчерпана, выводят на этапе S416. Если будет получен отрицательный результат определения, обработка переходит на этап S407.
На этапе S407 модуль 212 обработки определения конфигурации изображения выделяет из части (частей) информации предыстории съемки, выделенных на этапе S405, одну или больше частей информации предыстории съемки, имеющих такую информацию положения в кадре, как и информация положения в кадре, полученная как результат определения конфигурации изображения на этот раз. Затем, на этапе S408, модуль 212 обработки определения конфигурации изображения определяет, меньшее ли количество выделенных частей информации, чем максимальное количество раз съемки/записи Dmax, которое установлено в соответствии с информацией положения в кадре.
Если будет получен положительный результат определения на этапе S408, результат определения, обозначающий, что конфигурация изображения не была исчерпана, выводят на этапе S416. Если будет получен отрицательный результат определения, обработка переходит на этап S409.
На этапе S409 модуль 212 обработки определения конфигурации изображения выделяет из части (частей) информации предыстории съемки, выделенных на этапе S407, одну или больше частей информации предыстории съемки, имеющих такую же информацию размера, как и информация размера, полученная как результат определения конфигурации изображения на этот раз. Затем, на этапе S410, модуль 212 обработки определения конфигурации изображения определяет, меньше ли количество выделенных частей информации, чем максимальное количество раз съемки/записи Еmax, которое установлено в соответствии с информацией размера.
Если положительный результат определения будет получен на этапе S410, результат определения, обозначающий, что конфигурация изображения не была исчерпана, будет выведен на этапе S416. Если будет получен отрицательный результат определения, обработка переходит на этап S411.
На этапе S411 модуль 212 обработки определения конфигурации изображения выделяет из части (частей) информации предыстории съемки, выделенных на этапе S409, одну или больше частей информации предыстории съемки, имеющих такую же информацию ориентации лица, как и в информация об ориентации лица, полученная на этот раз, как результат определения конфигурации изображения. Затем на этапе S412 модуль 212 обработки определения конфигурации изображения определяет, меньше ли количество выделенных частей информации, чем максимальное количество раз съемки/записи Fmax, которое было установлено в соответствии с информацией ориентации лица.
Если положительный результат определения будет получен на этапе S412, результат определения, обозначающий, что конфигурация изображения не была исчерпана, выводят на этапе S416. Если будет получен отрицательный результат определения, обработка переходит на этап S413.
На этапе S413 модуль 212 обработки определения конфигурации изображения выделяет из части (частей) информации предыстории съемки, выделенных на этапе S411, одну или больше частей информации предыстории съемки, имеющих такую же информацию выражения, как и информация выражения, полученная на этот раз, как результат определения конфигурации изображения. Затем на этапе S414 модуль 212 обработки определения конфигурации изображения определяет, меньше ли количество выделенных частей информации, чем максимальное количество раз съемки/записи Gmax, установленное в соответствии с информацией выражения.
Если положительный результат определения будет получен на этапе S414, результат определения, обозначающий, что конфигурация изображения не была исчерпана, выводят на этапе S416.
С другой стороны, если будет получен отрицательный результат определения на этапе S414, это означает, что конфигурация изображения была исчерпана в отношении всех элементов формирования конфигурации изображения: информация о положении панорамирования/наклона, о количестве субъектов, о параметрах индивидуальных особенностей индивидуума, информация о положении в кадре, информация о размере (размер субъекта), информация об ориентации лица и информация о выражении.
Поэтому в этом случае обработка переходит на этап S415, где выводят результат определения, обозначающий, что конфигурация изображения, определенная на этот раз, была исчерпана.
Этап S415 соответствует получению положительного результата определения на этапе S308 на фиг.26.
Далее, со ссылкой на блок-схему последовательности выполнения операций, показанную на фиг.28, будет описан второй пример процедуры обработки, выполняемой блоком 62 определения конфигурации изображения. Второй пример обработки соответствует обработке изменения алгоритма определения конфигурации изображения, показанной на фиг.4, в соответствии описанной выше основной структурой.
Кроме того, в системе формирования изображения в соответствии с данным вариантом воплощения алгоритм определения конфигурации изображения может быть классифицирован на два типа: алгоритм определения конфигурации изображения первого типа и алгоритм определения конфигурации изображения второго типа.
Алгоритм определения конфигурации изображения первого типа представляет собой, например, алгоритм определения конфигурации изображения, который использует элементы формирования конфигурации изображения, за исключением выражения, то есть положение панорамирования/наклона, количество субъектов, параметры индивидуальных особенностей, положение в кадре, размер субъекта и ориентация лица, для определения исчерпанной конфигурации изображения на фиг.27.
С другой стороны, алгоритм определения конфигурации изображения второго типа представляет собой алгоритм определения конфигурации изображения, который использует выражение как элемент, формирующий конфигурацию изображения, для определения исчерпанной конфигурации изображения на фиг.27.
Алгоритм определения конфигурации изображения первого типа представляет собой алгоритм, который, в основном, использует элементы формирования конфигурации изображения, для определения композиции, в качестве конфигурации изображения. С другой стороны, алгоритм определения конфигурации изображения второго типа ассоциирован с процессом определения момента времени съемки/записи на этапе S309, показанным на фиг.26, и представляет собой алгоритм, который использует элемент формирования конфигурации изображения для определения момента времени съемки/записи. Учитывая этот момент, можно использовать алгоритм для определения момента времени съемки/записи, когда ориентацию лица определяют как соответствующую. В этом случае ориентацию лица можно использовать в алгоритме определения конфигурации изображения второго типа.
Второй пример, показанный на фиг.28, представляет собой процедуру обработки изменения алгоритма определения конфигурации изображения первого типа, среди алгоритмов определения конфигурации изображения первого типа и второго типа.
Как показано на фиг.28, на этапе S501 модуль 212 обработки определения конфигурации изображения устанавливает алгоритм, который заранее определен для исходной установки, среди множества алгоритмов определения конфигурации изображения первого типа.
Этапы S502-S514 представляют собой те же, что и этапы S301-S313 на фиг.26.
Однако если положительный результат определения будет получен в процессе определения, была ли исчерпана конфигурация изображения на этапе S509, алгоритм определения конфигурации изображения первого типа меняют на другой на этапе S515, и затем обработка возвращается на этап S503.
При такой обработке, если определенная конфигурация изображения будет исчерпана, обработку определения конфигурации изображения выполняют снова с другим алгоритмом определения конфигурации изображения первого типа, таким образом, что новая конфигурация изображения может быть определена как соответствующая конфигурации изображения. В соответствии с этим, даже если не произойдет существенное изменение в содержании изображения данных снятого изображения, данные изображения с содержанием изображения, имеющим другую конфигурацию изображения, могут быть сняты/записаны.
Следует отметить, что количество вариаций алгоритма определения конфигурации изображения первого типа, который можно менять на этапе S515, не ограничено чем-либо конкретным. Если все пригодные для изменения алгоритмы будут использованы в результате повторения этапа S515, первый алгоритм используют снова, и затем алгоритмы можно менять один за другим.
Описан конкретный пример этапа S515. В соответствии с фиг.19, алгоритм, определяющий V1, как размер субъекта, для удовлетворения условия соответствующей конфигурации изображения (часть (а) на фиг.19), меняют на алгоритм, определяющий V1xa, как размер субъекта (часть (b) на фиг.19).
В соответствии с фиг.20, алгоритм, определяющий положение субъекта, для удовлетворения условия, соответствующего конфигурации изображения, меняют с части (а) на часть (b) на фиг.20, или с части (b) на часть (с) на фиг.20.
В соответствии с фиг.21, алгоритм, определяющий количество субъектов, для удовлетворения условию соответствующей конфигурации изображения, меняют с части (а) на часть (b) на фиг.21, то есть количество субъектов меняется с 2 на 1. Кроме того, сам субъект, для удовлетворения условия соответствующей конфигурации изображения, меняется с субъекта 1 на субъект 2, как показано, как переход с части (b) к частям (с) и (d) на фиг.21.
В это время алгоритм может измениться с алгоритма съемки только индивидуума как субъекта 1 на алгоритм съемки только индивидуума как субъекта 2, используя параметры распознавания отдельных субъектов 1 и 2, как правило, изменения самого субъекта.
В качестве альтернативы, алгоритм может изменяться с алгоритма для съемки только субъекта, находящегося слева, на алгоритм съемки только субъекта, находящегося справа.
На фиг.29 иллюстрируется третий пример процедуры обработки, выполняемой блоком 62 определения конфигурации изображения.
Так же, как и во втором примере, показанном на фиг.28, третий пример обработки соответствует обработке алгоритма изменения определения конфигурации изображения, показанного на фиг.4, в соответствии с описанной выше основной структурой. Однако в третьем примере алгоритм определения конфигурации изображения второго типа меняют на алгоритм определения конфигурации изображения первого типа и второго типа.
Рассмотрим фиг.29, на этапе S601 модуль 212 обработки определения конфигурации изображения устанавливает алгоритм, который был заранее определен для исходной установки, среди множества алгоритмов определения конфигурации изображения второго типа.
Этапы S602-S614 представляют собой те же, что и этапы S301-S313 на фиг.26.
Однако если положительный результат определения будет получен при обработке определения, была ли исчерпана конфигурация изображения на этапе S609, алгоритм определения конфигурации изображения второго типа изменяют на этапе 8615, и затем обработка переходит на этап S610. На этапе S610 определяют, является ли момент времени подходящим для съемки/записи в соответствии с алгоритмом, измененным на этапе S615.
Например, предположим, что алгоритм, определяющий улыбку, как условие выражения, соответствующее конфигурации изображения, изменили на алгоритм, определяющий отсутствие улыбки на этапе S615. В соответствии с этим, время съемки/записи определяют как соответствующее на этапах S610 и S611, когда субъект, присутствующий в данных снятого изображения в это время, не улыбается.
В алгоритме определения конфигурации изображения второго типа также не ограничено количество вариаций изменяемых алгоритмов. В соответствии с повторением этапа S615 алгоритм можно изменять путем ротации множества вариантов.
Алгоритм определения конфигурации изображения второго типа относится к времени съемки/записи. Таким образом, в потоке обработки, показанном на фиг.29, обработка не возвращается на этап S603 после изменения алгоритма определения конфигурации изображения второго типа на этапе S615, но обработка переходит на этап S610 для выполнения обработки определения времени съемки/записи.
В качестве альтернативы, обработка может вернуться с этапа S615 на этап S603. Это связано с тем, что при такой процедуре обработку определения времени съемки/записи на основе алгоритма определения измененной конфигурации изображения второго типа в конечном итоге выполняют на этапе S610.
На фиг.30 показан четвертый пример процедуры обработки, выполняемой блоком 62 определения конфигурации изображения.
Четвертый пример обработки соответствует обработке изменения алгоритма определения конфигурации изображения, показанного на фиг.4, в соответствии описанной выше основной структурой. Однако в четвертом примере можно изменять алгоритмы определения конфигурации изображения как первого типа, так и второго типа.
Как показано на фиг.30, на этапе S701 модуль 212 обработки определения конфигурации изображения устанавливает алгоритмы определения конфигураций изображения первого типа и второго типа, которые заранее определены для исходной установки, среди множества алгоритмов определения конфигурации изображения первого типа и множества алгоритмов определения конфигурации изображения второго типа.
Этапы S702-S714 представляют собой те же, что и этапы S301-S313 на фиг.26.
Однако если положительный результат определения будет получен в процессе определения, была ли исчерпана конфигурация изображения на этапе S709, алгоритм определения конфигурации изображения меняют на этапе S715, и затем обработка возвращается на этап S703.
На этапе S715, по меньшей мере, может быть изменен любой один из алгоритмов определения конфигурации изображения первого типа и второго типа. Таким образом, только алгоритм определения конфигурации изображения первого типа может быть изменен или только может быть изменен алгоритм определения конфигурации изображения второго типа. В качестве альтернативы, оба алгоритма определения конфигурации изображения первого типа и второго типа могут быть изменены одновременно.
Что касается того, как изменить алгоритм определения конфигурации изображения на этапе S715, что также относится к первому - третьему примерам, соответствующий алгоритм определения конфигурации изображения, который будет использоваться следующим, может быть установлен на основе алгоритма определения конфигурации изображения, установленного в данный момент времени.
Описан конкретный пример этапа S715.
В состоянии, когда субъекты А и В, которые были по отдельности распознаны, детектируют во время поиска субъектов, предполагая, что установлен алгоритм определения конфигураций изображения для получения результата определения конфигурации изображения "присутствует только субъект А, выражение представляет собой улыбку". В этом случае, состояние, в котором "присутствует только индивидуум как субъект А", указано как соответствующее в алгоритме определения конфигурации изображения первого типа, тогда как состояние "выражение представляет собой улыбку" указано как соответствующее в алгоритме определения конфигурации изображения второго типа.
Кроме того, предположим, что алгоритм изменяют на алгоритм "присутствует только субъект В, выражение "улыбка отсутствует" на этапе S715 на определенной стадии после него. Такое изменение представляет собой изменение с алгоритма определения конфигурации изображения первого типа, который указывает, что состояние, в котором "присутствует только индивидуум, как субъект А", является соответствующим, на алгоритм определения конфигурации изображения первого типа, указывающего, что состояние, в котором "присутствует только индивидуум, как субъект В", является соответствующим. Кроме того, это представляет собой изменение с алгоритма определения конфигурации изображения второго типа, указывающего, что состояние, в котором "выражение представляет собой улыбку", является соответствующим, на алгоритм определения конфигурации изображения второго типа, который указывает, что состояние, в котором "выражение улыбка отсутствует", является соответствующим.
В частности, максимальное количество раз съемки/записи для каждого элемента, формирующего конфигурацию изображения, показанного на фиг.27, соответствует количеству изображений, имеющих одинаковую конфигурацию изображения каждого элемента формирования, которые могут быть сняты/записаны. В соответствии с приведенным выше описанием, максимальное количество раз съемки/записи заранее установлено и фиксировано. В качестве альтернативы, максимальное количество раз съемки/записи, то есть максимальное количество раз записи снятого изображения, имеющего одинаковую конфигурацию изображения, можно адаптивно изменять в соответствии с заданным условием.
Далее описан пример структуры адаптивного изменения максимального количества раз съемки/записи.
Цифровая фотокамера 1 в соответствии с данным вариантом воплощения выполнена с возможностью выполнения индивидуального распознавания. Таким образом, обработка индивидуального распознавания выполняется цифровой фотокамерой 1 в соответствии с данным вариантом воплощения для людей, которые присутствуют на месте, где установлена система формирования изображения в соответствии с данным вариантом воплощения, и параметры индивидуальных особенностей, полученные в результате распознавания, заранее регистрируют.
На фиг.31 иллюстрируется пример структуры таблицы индивидуальной регистрации, которую формируют путем регистрации параметров индивидуальных особенностей. Таблицу индивидуальной регистрации содержат, например, в ОЗУ 29 или в запоминающем устройстве 30 типа флэш.
Таблица индивидуальной регистрации, показанная на фиг.31, включает в себя модули с 1 по i зарегистрированных данных. Каждый из модулей зарегистрированных данных соответствует распознанному отдельному человеку.
Как показано на фиг.31, модуль зарегистрированных данных включает в себя идентификатор индивидуального субъекта, параметры с 1 по j индивидуальных особенностей и основную информацию субъекта.
ИД индивидуального субъекта представляет собой уникальный идентификатор, назначенный каждому индивидууму, зарегистрированному в таблице индивидуальной регистрации. Параметры с 1 по j индивидуальных особенностей представляют собой различные параметры, которые получают как результат процесса распознавания отдельных человека и которые определяют этого индивидуума. Используя параметры с 1 по j индивидуальных особенностей, в частности, может быть идентифицировано лицо каждого индивидуума.
Основная информация субъекта обозначает, представляет ли соответствующий индивидуум основного субъекта. Здесь основной субъект означает индивидуального субъекта, имеющего высокую важность среди субъектов, как отдельных людей (индивидуальные субъекты), которых снимают с помощью системы формирования изображения в соответствии с данным вариантом воплощения.
Пользователь может выбрать основной субъект среди отдельных людей, зарегистрированных в таблице индивидуальной регистрации, и может зарегистрировать выбранного основного субъекта, выполняя заданную операцию в цифровой фотокамере 1. В соответствии с этой операцией, значение, обозначающее основного субъекта, сохраняют как информацию основного субъекта в модуле зарегистрированных данных, соответствующем индивидуальному субъекту, зарегистрированному как основной субъект в таблице индивидуальной регистрации.
В данном варианте воплощения цифровая фотокамера 1 снимает/записывает больше изображений, имеющих конфигурацию изображения, включающую в себя индивидуума, установленного как основной субъект, среди зарегистрированных отдельных людей, чем количество изображений, имеющих конфигурацию изображения, не включающую в себя индивидуума, установленного как основной субъект.
Например, изображения главного героя на вечеринке или тому подобное следует предпочтительно снимать/записывать большее количество раз, чем изображения других людей. Такое требование может быть удовлетворено в результате применения описанной выше структуры.
Далее приведено описание примера процедуры обработки для реализации операции съемки/записи большего количества изображений индивидуума, установленного как основной субъект (сознательная съемка/запись основного субъекта).
В приведенном ниже описании случай, когда выполняют сознательную съемку/запись основного субъекта, при обработке в соответствии с четвертым примером, показанным на фиг.30, используется как пример. Для реализации сознательной съемки/записи основного субъекта при обработке, показанной на фиг.30, обработку, показанную на фиг.32, дополнительно вставляют между этапами S706 и S707 на фиг.30.
Как показано на фиг.32, на этапе S801 модуль 212 обработки определения конфигурации изображения выполняет поиск в таблице индивидуальной регистрации, содержащейся в данное время в ОЗУ 29 или в запоминающем устройстве 30 типа флэш, индивидуума, установленного как основной субъект. С этой целью модуль 212 обработки определения конфигурации изображения может выполнять поиск зарегистрированного модуля данных, имеющего информацию основного субъекта, обозначающую основной субъект среди зарегистрированных модулей данных, формирующих таблицу регистрации индивидуума. Затем параметры индивидуальных особенностей считывают и получают из таблицы индивидуальной регистрации. Таким образом, на этапе S801 получают параметры индивидуальных особенностей индивидуума для индивидуума, установленного как основной субъект.
Затем, на этапе S802, модуль 212 обработки определения конфигурации изображения выполняет поиск основного субъекта среди субъектов, детектированных по данным снятого изображения, которые были получены в данное время (снятые в данное время данные изображения). С этой целью модуль 212 обработки определения конфигурации изображения может выполнять поиск субъекта, имеющего параметры индивидуальных особенностей индивидуума, которые соответствуют параметрам индивидуальных особенностей индивидуума, полученным на этапе S801, среди параметров индивидуальных особенностей соответствующих субъектов, детектируемых из данных снимаемого в данный момент времени изображения. Субъект, имеющий соответствующие параметры индивидуальных особенностей индивидуума, определяют как основной субъект.
Затем, на этапе S803, модуль 212 обработки определения конфигурации изображения определяет, присутствует ли основной субъект в изображении в снимаемых в данный момент времени данных изображения, на основе результата поиска, полученного на этапе S802.
Если будет получен отрицательный результат определения на этапе S803, обработка переходит на этап S804, где модуль 212 обработки определения конфигурации изображения заменяет максимальное количество раз съемки/записи Сmax, которое установлено для параметров индивидуальных особенностей индивидуума, на опорное значение а1 (этап S406 на фиг.27).
С другой стороны, если положительный результат определения будет получен на этапе S803, обработка переходит на этап S805, где модуль 212 обработки определения конфигурации изображения заменяет максимальное количество раз съемки/записи Сmax, установленное для параметров индивидуальных особенностей индивидуума, на значение а2, соответствующее основному субъекту (этап S406 на фиг.27).
Значение а2, соответствующее основному субъекту, представляет собой заданное значение, большее, чем опорное значение а1.
Поэтому во время выполнения обработки, показанной на фиг.27, как этапы S708 и S709 на фиг.30, когда максимальное количество раз съемки/записи Сmax будет заменено на значение а2, соответствующее основному субъекту, максимальное количество раз съемки/записи Сmax, которое сравнивают с количеством выделенных модулей на этапе S406, больше, чем в случае замены на опорное значение а1. Таким образом, верхний предел количества раз съемки/записи до тех пор, пока изображение не будет определено, как исчерпанное, становится больше в том, что касается параметров индивидуальных особенностей индивидуума, как элемента формирования конфигурации изображения.
В соответствии с этим, когда индивидуум как основной субъект представляет собой субъект, количество раз съемки/записи увеличивается. В результате, снятые изображения, включающие в себя индивидуума, установленного как основной субъект, могут быть записаны в большем количестве, чем другие снятые изображения.
Хотя в соответствии с данным вариантом воплощения используется система формирования изображения, возможно перемещение пользователем цифровой фотокамеры 1, вместе с головкой 10 панорамирования/наклона, для установки ее в другое состояние положения или в другой окружающей среде.
Кроме того, информация предыстории съемки, содержащаяся в модуле 213 содержания предыстории съемки, используется для определения, была ли исчерпана конфигурация изображения или нет, как описано выше.
Если система формирования изображения (цифровая фотокамера 1 и головка 10 панорамирования/наклона) перемещается, как описано выше, изображение, снимаемое в это время, неизбежно будет отличаться от изображения, снятого до того, как систему формирования изображения переместили, даже если положение панорамирования/наклона будет тем же. Кроме того, в зависимости от окружающей среды индивидуум как субъект может изменяться до/после перемещения.
С учетом описанных выше условий информация предыстории съемки, полученная перед перемещением, больше не будет надежной после перемещения системы формирования изображения. Таким образом, после перемещения системы формирования изображения информацию предыстории съемки, полученную до перемещения, не следует использовать.
В таком случае, например, пользователь перемещает и устанавливает систему формирования изображения и затем очищает (удаляет) информацию предыстории съемки, содержащуюся в модуле 213 содержания предыстории съемки, путем выполнения заданной операции с цифровой фотокамерой 1. После этого, в цифровой фотокамере 1 информацию предыстории съемки вновь формируют с помощью модуля информации предыстории съемки, вновь генерируемого в соответствии с автоматической съемкой/записью, и последовательно обновляют.
Однако для пользователя неудобно очищать информацию предыстории съемки каждый раз при перемещении системы формирования изображения. Если пользователь забудет очистить информацию предыстории съемки, снятое изображение, имеющее соответствующую конфигурацию изображения, к сожалению, не будет записано.
С учетом этого, информация предыстории съемки, содержащаяся в модуле 213 содержания предыстории съемки, должна автоматически очищаться в соответствии с перемещением системы формирования изображения.
На фиг.33 представлен пример структуры блока 62 определения конфигурации изображения, который позволяет автоматически очищать информацию предыстории съемки, как описано выше. На фиг.33 те же части, что и на фиг.10, обозначены теми же номерами ссылочных позиций, и соответствующее описание не приведено.
В блоке 62 определения конфигурации изображения, показанном на фиг.33, модуль 214 управления сбросом и датчик 215 ускорения дополнительно предусмотрены в конструкции, показанной на фиг.10.
Датчик 215 ускорения фактически закреплен в заданном положении на цифровой фотокамере 1 и детектирует ускорение, которое возникает в нем, то есть движения, связанные с силой, приложенной к цифровой фотокамере 1. Можно использовать другую структуру, детектирующую движения, кроме датчика ускорения, такую как гиродатчик, если только она позволяет детектировать движение цифровой фотокамеры 1.
Модуль 214 управления сбросом выполняет обработку очистки информации предыстории съемки, содержащейся в модуле 213 содержания предыстории сброса, на основе сигнала управления панорамированием/наклоном, выводимого из блока 63 управления панорамированием/наклоном/степенью увеличения и значением ускорения, детектируемым датчиком 215 ускорения.
На фиг.34 иллюстрируются изменения значения ускорения, детектируемые датчиком 215 ускорения с течением времени. В качестве датчика ускорения использовали датчик, позволяющий детектировать соответствующее значение ускорения в направлениях по трем осям: ось X, ось Y и ось Z. Такой датчик, позволяющий выполнять детектирование по трем осям, можно использовать как датчик 215 ускорения в данном варианте воплощения. На фиг.34, однако, показаны значения ускорения, детектированные только в направлении одной оси, для упрощения иллюстрации и облегчения понимания.
Например, в состоянии, в котором цифровая фотокамера 1 неподвижна и зафиксирована в определенном положении и ее не перемещают в направлении панорамирования/наклона с помощью головки 10 панорамирования/наклона (стационарное состояние), детектируемое значение ускорения, по существу, равно 0, как показано в периоды перед/после периода А на фиг.34.
С другой стороны, если пользователь, например, держит и перемещает цифровую фотокамеру 1, возникает значение ускорения, большее, чем в неподвижном состоянии, как показано в период А на фиг.34.
Затем установлено пороговое значение, как показано на фиг.34, для типичного и среднего значения ускорения, которое может быть получено, когда пользователь держит и перемещает цифровую фотокамеру 1, и типичного и среднего значения ускорения, которое может быть получено в стационарном состоянии. Затем это пороговое значение сравнивают с детектируемым значением ускорения. Если абсолютное значение для значения ускорения превышает это пороговое значение, можно определить, что цифровую фотокамеру 1 (систему формирования изображения) перемещают.
На фиг.35 также представлены изменения в значении ускорения, детектируемые с помощью датчика 215 ускорения с течением времени.
Например, предположим, что цифровую фотокамеру 1 перемещают с помощью головки 10 панорамирования/наклона в состоянии, в котором цифровая фотокамера 1 установлена на головке 10 панорамирования/наклона, и устанавливают в фиксированной точке.
Скорость и активация движений в направлениях панорамирования и наклона при использовании головки 10 панорамирования/наклона заранее определены. Поэтому структура значений ускорения, детектируемых датчиком 215 ускорения, в соответствии с движением головки 10 панорамирования/наклона в направлении панорамирования/наклона в состоянии, когда головка 10 панорамирования/наклона не движется и находится в фиксированном положении, по существу, постоянна.
Такая структура значений ускорения, которые могут быть получены, когда головка 10 панорамирования/наклона движется в направлении панорамирования/наклона, показана как ожидаемая структура значения ускорения, окруженная пунктирной линией на фиг.35. Во время выполнения панорамирования/наклона, когда головка 10 панорамирования/наклона перемещается в направлении панорамирования/наклона, получают заданную структуру изменений значений ускорения.
С другой стороны, когда пользователь перемещает систему формирования изображения, удерживаемую в руке, в состоянии, когда головка 10 панорамирования/наклона движется в направлении панорамирования/наклона, компонент значения ускорения, связанный с движением системы формирования изображения, задаваемым пользователем, комбинируется с ожидаемой структурой значения ускорения. Таким образом, в этом случае получают совершенно другую структуру, отличающуюся от ожидаемой структуры значений ускорения, как показано, как структура значений ускорения в период В на фиг.35.
Блок-схема последовательности операций на фиг.36 иллюстрирует пример процедуры обработки, выполняемой модулем 214 управления сброса, показанной на фиг.33.
Вначале модуль 214 управления сброса получает сигнал детектирования, выводимый датчиком 215 ускорения на этапе S901, и определяет, равно ли значение ускорения (абсолютное значение), представленное сигналом детектирования, которое было получено, или больше, чем заданное пороговое значение, на этапе S902.
Если на этапе S902 будет получен отрицательный результат определения, это означает, что цифровая фотокамера 1 находится в состоянии, в котором любое движение в соответствии с движением в направлении панорамирования/наклона не возникает и в котором любое принудительное движение, получающееся, когда пользователь обращается с камерой, не возникает. Таким образом, цифровая фотокамера 1 находится в стационарном состоянии. Таким образом, обработка возвращается на этап S901, в данном случае.
С другой стороны, если положительный результат определения будет получен на этапе S902, возможно, что цифровая фотокамера 1 перемещается в направлении панорамирования/наклона с помощью головки 10 панорамирования/наклона или перемещается принудительно. В этом случае обработка переходит на этап S903.
На этапе S903 модуль 214 управления сбросом получает сигнал управления панорамирования/наклона из блока 63 управления панорамированием/наклоном/степенью увеличения.
Затем, на этапе S904, модуль 214 управления сбросом определяет, выполняется ли в данном случае привод панорамирования/наклона, то есть выполняется ли движение в направлении панорамирования и/или в направлении наклона с помощью головки 10 панорамирования/наклона. Например, если эффективный сигнал управления панорамирования/наклона, обозначающий, что выполняется привод панорамирования/наклона, не будет получен на этапе S903, это означает, что блок 63 управления панорамированием/наклоном/степенью увеличения не выполняет управление панорамирования/наклона и что цифровая фотокамера 1 не перемещается с помощью головки 10 панорамирования/наклона в соответствии с управлением панорамной съемкой/наклоном. В этом случае на этапе S904 получают отрицательный результат определения. С другой стороны, если эффективный сигнал управления панорамной съемкой/наклоном будет получен на этапе S903, это означает, что цифровую фотокамеру 1 перемещают с помощью головки 10 панорамирования/наклона, соответственно, таким образом, что получают положительный результат определения.
Если на этапе S904 будет получен отрицательный результат определения, модуль 214 управления сбросом пропускает этапы S905 и S906 до этапа S907. Если будет получен положительный результат определения, модуль 214 управления сбросом выполняет этапы S905 и S906.
На стадии этапа S905 распознают, что перемещение вдоль панорамирования/наклона цифровой фотокамеры 1 выполняется с помощью головки 10 панорамирования/наклона, но не определяют, перемещали ли принудительно цифровую фотокамеру 1 (и головку 10 панорамирования/наклона) в этом состоянии движения панорамирования/наклона. Таким образом, этот момент определяют на этапах S905 и S906.
С этой целью модуль 214 управления сбросом получает ожидаемую структуру значений ускорения на этапе S905. Информацию об ожидаемой структуре значений ускорения сохраняют как заданные данные, например, в запоминающем устройстве 30 типа флэш. Таким образом, ожидаемая структура значения ускорения может быть получена путем считывания данных.
На этапе S906 модуль управления 214 сбросом сравнивает ожидаемую структуру значений ускорения, полученную на этапе S905, с фактической структурой значения ускорения, обозначенной сигналом детектирования, полученным на этапе S901, и определяет, равна ли разница между ними или больше, чем определенное значение (равна ли степень аппроксимации определенному значению или меньше).
Если будет получен отрицательный результат определения на этапе S906, модуль 214 управления сбросом определяет, что выполняется операция панорамирования/наклона, в то время как головку 10 панорамирования/наклона не перемещали принудительно и она находилась в стационарном состоянии. В этом случае обработка возвращается на этап S901.
С другой стороны, если положительный результат определения будет получен на этапе S906, определяют, что головка 10 панорамирования/наклона выполняет операцию панорамирования/наклона и что головку 10 панорамирования/наклона и цифровую фотокамеру 1, закрепленную на ней, принудительно перемещали. В этом случае модуль 214 управления сбросом выполняет этап S907.
Таким образом, в соответствии с данным вариантом воплощения можно соответствующим образом детектировать состояние, в котором головку 10 панорамирования/наклона и цифровую фотокамеру 1, закрепленную на ней, перемещали принудительно, помимо движения механизма панорамирования/наклона (модуля подвижного механизма) головки 10 панорамирования/наклона, даже когда выполняется операция панорамирования/наклона. Как можно понять из приведенного выше описания, обработка достигает этапа S907, когда головку 10 панорамирования/наклона и цифровую фотокамеру 1, закрепленную на ней, принудительно перемещают, независимо от того, выполняет ли головка 10 панорамирования/наклона операцию панорамирования/наклона или нет.
На этапе S907 модуль 214 управления сбросом выполняет обработку сброса (удаления) информации предыстории съемки, содержащейся в модуле 213 содержания предыстории съемки.
Ниже описаны модификации системы формирования изображения в соответствии с описанным выше вариантом воплощения со ссылкой на фиг.37 и 38.
На фиг.37 в цифровой фотокамере 1 данные снятого изображения, полученные блоком 61 съемки/записи, передают из блока 64 управления связью в блок 71 управления связью в головке 10 панорамирования/наклона.
Кроме того, на фиг.37 показаны блок 71 управления связью, блок 72 управления панорамированием/наклоном и блок 73 определения конфигурации изображения как структура головки 10 панорамирования/наклона.
Данные снятого изображения, принимаемые блоком 71 управления передачей данных, выводят в блок 73 определения конфигурации изображения. Блок 73 определения конфигурации изображения имеет структуру, соответствующую структуре блока 62 определения конфигурации изображения, показанного на фиг.9, 10 и 33, и выполняет обработку определения конфигурации изображения на основе данных снятого изображения, вводимых в него. Кроме того, в этом случае блок 73 определения конфигурации изображения рассчитывает величину движения модуля механизма панорамирования и модуля механизма наклона для реализации направления съемки (угла обзора при съемке), для получения определенной соответствующей конфигурации изображения, и выводит сигнал управления панорамирования/наклона, обозначающий величину движения, в блок 72 управления панорамной съемкой/наклоном. В соответствии с этим, выполняют панорамную съемку/наклон для получения соответствующей конфигурации изображения, полученного с помощью блока 73 определения конфигурации изображения.
Как описано выше, в системе формирования изображения, показанной на фиг.37, данные снятого изображения передают из цифровой фотокамеры 1 в головку 10 панорамирования/наклона и затем конфигурацию изображения определяют на основе данных снятого изображения, и управление панорамной съемкой/наклоном выполняют в соответствии с определением, выполненным в головке 10 панорамирования/наклона.
Для того чтобы обеспечить управление степенью увеличения (углом обзора) как управление углом обзора при съемки изображения в структуре, показанной на фиг.37, угол обзора в соответствии с соответствующей конфигурацией изображения, определенной блоком 73 определения конфигурации изображения, головки 10 панорамирования/наклона может быть передал в блок 61 съемки/записи путем обмена данными между блоками 64 и 71 управления передачей данных, и блок 61 съемки/записи может обеспечить привод линз регулировки степени увеличения изображения для получения требуемого угла обзора.
На фиг.38 иллюстрируется пример структуры как другой модификации системы формирования изображения в соответствии с данным вариантом воплощения. На фиг.38 части, те же, что части, показанные на фиг.37, обозначены теми же номерами ссылочных позиций, и соответствующее описание не приведено.
В этой системе головка 10 панорамирования/наклона включает в себя блок 75 съемки/записи. Как блок 61 съемки/записи, показанный на фиг.9, 10 и 33, блок 75 съемки/записи включает в себя оптическую систему и устройство формирования изображения (датчик изображения), для съемки изображений, для получения сигнала на основе света изображения (сигнала изображения), и также включает в себя модуль обработки сигнала для генерирования данных снятого изображения из сигнала изображения и систему управления записью для данных снятого изображения.
Данные снятого изображения, генерируемые блоком 75 съемки/записи, выводят в блок 75 определения конфигурации изображения.
Направление, в котором блок 75 съемки/записи снимает свет изображения (направление съемки), предпочтительно, должно в максимально возможной степени совпадать с направлением съемки цифровой фотокамеры 1, закрепленной на головке 10 панорамирования/наклона. Таким образом, блок 75 съемки/записи предусмотрен в головке 10 панорамирования/наклона таким образом, что изображение, снимаемое блоком 75 съемки/записи, будет в максимально возможной степени совпадать с изображением, снимаемым блоком 61 съемки/записи цифровой фотокамеры 1.
В этом случае, блок 73 определения конфигурации изображения и блок 72 управления панорамной съемкой/наклоном выполняют определение конфигурации изображения и управление приводом механизма панорамирования/наклона в соответствии с результатом определения конфигурации изображения таким же образом, как описано выше со ссылкой на фиг.37.
Следует отметить, что в данном случае блок 73 определения конфигурации изображения обеспечивает возможность для блока 71 управления передачей данных передавать сигнал инструкции для инструктирования цифровой фотокамеры 1 для выполнения съемки/записи соответствии со временем и обеспечивает возможность для цифровой фотокамеры 1 выполнять съемку/запись. Цифровая фотокамера 1 выполняет съемку/запись путем приема сигнала инструкции, таким образом, что данные изображения, полученные в это время блоком 61 съемки/записи, будут сняты/записаны.
Таким образом, в других модификациях все управление и обработка, связанная с определением конфигурации изображения и с управлением получения конфигурации изображения, за исключением выполнения съемки/записи, могут быть выполнены на стороне головки 10 панорамирования/наклона.
В приведенном выше описании управление панорамированием и управление наклоном выполняют путем управления движением механизма панорамирования/наклона головки 10 панорамирования/наклона. В качестве альтернативы, вместо использования головки 10 панорамирования/наклона свет, формирующий изображение, отражаемый отражающим зеркалом, может быть подан в модуль 21 оптической системы из цифровой фотокамеры 1, и отраженный свет можно перемещать для получения результата панорамирования/наклона в виде изображения, полученного на основе света формирования изображения.
Кроме того, результат, эквивалентный панорамной съемке/наклону, может быть получен путем выполнения управления смещением в горизонтальном и вертикальном направлениях области пикселя, для того чтобы снять сигнал изображения, эффективный как изображение, из устройства формирования изображения (датчика 22 изображения) цифровой фотокамеры 1. В этом случае головка 10 панорамирования/наклона или другое устройство для панорамирования/наклона, кроме цифровой фотокамеры 1, становится ненужным, и операции, соответствующие управлению получения конфигурации изображения в соответствии с данным вариантом воплощения, могут быть полностью выполнены только с помощью цифровой фотокамеры 1.
Кроме того, управление углом обзора (управление степенью увеличения) может быть реализовано путем выполнения обработки изображения, состоящей в выделении части области изображения из данных снятого изображения, вместо регулировки степени увеличения.
Кроме того, панорамная съемка/наклон могу быть выполнены благодаря использованию механизма, который позволяет изменять оптическую ось объектива в модуле оптической системы цифровой фотокамеры 1 в горизонтальном/вертикальном направлениях и путем управления движением такого механизма.
В системе формирования изображения в соответствии с описанным выше вариантом воплощения семь параметров приняты как элементы, формирующие конфигурацию изображения: информация о положении панорамирования/наклона, количество субъектов, параметры индивидуальных особенностей индивидуума, информация о положении в кадре, информация о размере (размер субъекта), информация об ориентации лица и информация о выражении. Кроме того, другие параметры могут быть приняты как элементы, формирующие конфигурацию изображения.
Например, параметры о самих данных изображения, такие как яркость (свечение) изображения, информация о цвете и контрасте, могут быть приняты как элементы, формирующие конфигурацию изображения. Например, когда яркость (свечение) и информация цвета изображения используются как параметры, изменение яркости или цвета изображения в результате изменения освещения в окружающей среде генерирует другую конфигурацию изображения, даже если субъект и композиция не меняются.
В приведенном выше описании система формирования изображения включает в себя головку 10 панорамирования/наклона и цифровую фотокамеру 1, закрепленную на ней. Однако структура съемки/записи на основе определения конфигурации изображения и результата определения конфигурации изображения, в соответствии с данным вариантом воплощения, может быть реализована с помощью только цифровой фотокамеры 1, без головки 10 панорамирования/наклона.
Таким образом, даже в состоянии, когда цифровая фотокамера 1 в данном варианте воплощения установлена, будучи закрепленной, конфигурацию изображения определяют в соответствии со снятым здесь изображением, в результате чего выполняется автоматическая съемка/запись в соответствии с результатом определения. Такой способ использования цифровой фотокамеры 1 достаточно полезен в зависимости от ситуации.
Далее приведено описание примеров применения основной структуры определения конфигурации изображения в соответствии с данным вариантом воплощения, описанным выше со ссылкой на фиг.2 и 3, и другое устройство, кроме описанной выше системы формирования изображения.
Вначале, как показано на фиг.39, структуру определения конфигурации изображения в соответствии с данным вариантом воплощения применяют к одному устройству формирования изображения, такому как цифровая фотокамера. Когда изображение, снятое устройством формирования изображения в режиме съемки, имеет соответствующую конфигурацию изображения, в соответствии с результатом определения, устройство формирования изображения уведомляет пользователя об этом факте, отображая его.
С этой целью устройство формирования изображения включает в себя блок 81 определения конфигурации изображения, блок 82 управления уведомлением и модуль 83 дисплея. Блок 81 определения конфигурации изображения имеет структуру блока 200 определения конфигурации изображения, показанную на фиг.2.
Например, предположим, что пользователь держит устройство формирования изображения в своей руке, устанавливая устройство формирования изображения в режим съемки, и что съемка/запись может быть выполнена в любой момент времени при выполнении операции спуска затвора (операции с кнопкой затвора).
В таком состоянии блок 81 определения конфигурации изображения получает данные снятого изображения, полученные в результате съемки в этот момент времени, выполняет последовательность обработки для определения конфигурации изображения и определяет соответствующую конфигурацию изображения.
Кроме того, блок 81 определения конфигурации изображения определяет степень соответствия и схожесть между конфигурацией изображения данных снятого изображения, фактически полученных в этот момент времени, и определенной соответствующей конфигурацией изображения. Если будет достигнута определенная степень схожести или больше, блок 81 определения конфигурации изображения определяет, что содержание изображения данных снятого изображения, фактически полученных в результате съемки, имеет соответствующую конфигурацию изображения. Например, в соответствии с алгоритмом, используемым в данном фактическом случае, если будет получена определенная степень схожести или больше, которая достаточна для определения соответствия между конфигурацией изображения данных снятого изображения и соответствующей конфигурацией изображения, конфигурацию изображения определяют как соответствующую. Различные алгоритмы можно применять для определения степени соответствия и схожести. Алгоритм изменяется в зависимости от принятых элементов формирования конфигурации изображения, и, таким образом, их конкретный пример здесь, в частности, не описан.
Информацию о результате определения, обозначающую, что содержание изображения данных снятого изображения имеет соответствующую конфигурацию изображения, выводят в блок 82 управления уведомлением. В ответ на ввод описанной выше информации блок 82 управления уведомлением отображает управление, обеспечивающие выполнение модулем 83 дисплея отображения в заданной форме, для уведомления пользователя о том, что изображение, снятое в данный момент, имеет соответствующую конфигурацию изображения. Блок 82 управления уведомлением реализован с помощью функции управления отображением, включающей в себя микрокомпьютер (ЦПУ) в устройстве формирования изображения и функцию обработки изображения дисплея, для реализации отображения изображения в модуле 83 дисплея. Уведомление о соответствующей конфигурации изображения, передаваемое пользователю, может быть реализовано с помощью звука, такого как электронный звук или синтезированный звук.
Модуль 83 дисплея соответствует модулю 33 дисплея цифровой фотокамеры 1 в соответствии данным вариантом воплощения. Например, панель дисплея предусмотрена в заданном положении устройства формирования изображения, будучи открытой на поверхности устройства формирования изображения. В режиме съемки изображение, снимаемое в определенный момент времени, называемое сквозным изображением, типично отображается на нем. Таким образом, в обычном устройстве формирования изображения изображение, имеющее содержание, о котором следует уведомлять пользователя, что конфигурация изображения является соответствующей, отображается в модуле 83 дисплея, будучи наложенным на сквозное изображение. Пользователь выполняет операцию спуска затвора, когда отображается уведомление о соответствующей конфигурации изображения. В соответствии с этим, даже если пользователь не имеет достаточных знаний или навыков фотографирования, он или она может легко снимать фотографию, имеющую соответствующую конфигурацию изображения, то есть предпочтительное содержание изображения.
В примере, показанном на фиг.40, как и в примере, показанном на фиг.39, структуру определения конфигурации изображения в соответствии с вариантом воплощения применяют для одиночного устройства формирования изображения, такого как цифровая фотокамера.
В структуре, показанной на фиг.40, как и на фиг.39, блок 81 определения конфигурации изображения выполняет обработку определения соответствующей конфигурации изображения на основе введенных в него данных снятого изображения, определяет, какая конфигурацией изображения является соответствующей, на основе содержания изображения данных снятого изображения, полученных в момент времени после этого, и затем определяет, что содержание изображения данных снятого изображения получает определенную соответствующую конфигурацию изображения. Затем, когда определяют, что данные снятого изображения имеют соответствующую конфигурацию изображения, блок 81 определения конфигурации изображения уведомляет блок 84 управления спуском затвора об этом факте.
Блок 84 управления спуском затвора выполняет управление записью данных снятого изображения (съемки/записи) и реализован, например, на основе управления, выполняемого микрокомпьютером, включенным в устройство формирования изображения. В результате приема описанного выше уведомления блок 84 управления спуском затвора выполняет обработку сигнала изображения и обработку управления записью таким образом, что снятые данные изображения, полученные в этот момент времени, сохраняются на носителе записи или тому подобное.
С помощью такой структуры, когда пользователь снимает изображение, удерживая цифровую фотокамеру 1 в своей руке, снятое изображение может быть автоматически записано в момент времени, когда снятое изображения имеет содержание изображения, имеющее соответствующую конфигурацию изображения.
Структуры, показанные на фиг.39 и 40, можно применять в любой фотокамере, включающей в себя цифровую фотокамеру. Кроме того, эти структуры можно применять в так называемой фотокамере с пленкой, содержащей соли серебра, для записи снятого изображения на пленке, содержащей соли серебра, если в фотокамере с пленкой, содержащей соли серебра, будет предусмотрен датчик изображения, который получает свет датчика изображения, получаемый из оптической системы, путем разделения света, и модуль обработки сигнала цифрового изображения, принимающий и обрабатывающий сигнал от датчика изображения.
На фиг.41 показан пример структуры, в которой основную структуру определения конфигурации изображения в соответствии с вариантом воплощения применяют в устройстве формирования изображения, таком как цифровая фотокамера. Устройство 100 формирования изображения, представленное на фиг.41, включает в себя блок 101 определения конфигурации изображения, блок 102 формирования метаданных и блок 103 формирования файла, как показано. Здесь блок 101 определения конфигурации изображения соответствует блоку 200 определения конфигурации изображения, показанному на фиг.2.
Данные снятого изображения, полученные в результате съемки блоком съемки/записи (здесь не показан), подают в блок 101 определения конфигурации изображения, и в блок 103 формирования файла, в устройстве 100 формирования изображения. В таком случае данные снятого изображения, подаваемые в устройство 100 формирования изображения, представляют собой данные снятого изображения, которые необходимо сохранять на носителе записи в соответствии с операцией спуска затвора или тому подобное, и генерируют на основе сигнала изображения, полученного в результате съемки, выполняемой блоком съемки/записи (здесь не показан).
Вначале блок 101 определения конфигурации изображения постоянно и многократно выполняет обработку определения конфигурации изображения.
Как и в процессе определения конфигурации изображения, в этом случае обработка дополнительно выполняется для определения участка изображения, имеющего заданное отношение длины к ширине, при котором может быть получена определенная соответствующая конфигурация изображения (обрезка части изображения) среди всей области изображения входных данных снятого изображения на основе результата определения. Затем блок 101 определения конфигурации изображения выводит информацию, обозначающую указанный участок обрезки изображения блока 102 формирования метаданных.
Во время выполнения такой обработки блок 101 определения конфигурации изображения содержит информацию предыстории результатов определения (информацию предыстории результата определения). Если определенная конфигурация изображения будет исчерпана в соответствии с информацией предыстории результата определения, блок 10 определения конфигурации изображения не определяет участок обрезки изображения на основе того же результата определения конфигурации изображения, как на фиг.3. В качестве альтернативы, как на фиг.4, блок 101 определения конфигурации изображения меняет алгоритм определения конфигурации изображения и затем выполняет обработку определения конфигурации изображения и определяет участок обрезки изображения.
Блок 102 формирования метаданных формирует метаданные (метаданные редактирования), включающие в себя информацию, необходимую для получения изображения, имеющего соответствующую конфигурацию изображения, из соответствующих данных снятого изображения, на основе информации, вводимой в него, и выводит метаданные в блок 103 формирования файла. Метаданные редактирования представляют собой, например, информацию, обозначающую участок обрезки изображения, в изображении, как соответствующие данные снятого изображения.
В устройстве 100 формирования изображения, показанном на фиг.41, данные снятого изображения записывают на носитель записи так, чтобы их можно было обрабатывать как файл неподвижного изображения в заданном формате. Таким образом, блок 103 формирования файла преобразует данные снятого изображения в формат файла неподвижного изображения (формирует файл).
Блок 103 формирования файла выполняет кодирование со сжатием изображения, соответствующее формату файла изображения для данных снятого изображения, введенных в него, для получения основной части файла, включающей в себя данные снятого изображения. Кроме того, блок 103 формирования файла формирует часть данных, включающую в себя заголовок и блок дополнительной информации, путем сохранения метаданных редактирования, вводимых из блока 102 формирования метаданных, в заданном положении сохранения. Затем блок 103 формирования файла формирует файл неподвижного изображения, используя основную часть файла, заголовок и блок дополнительной информации, и выводит файл неподвижного изображения. В соответствии с этим, файл неподвижного изображения, включающий в себя данные снятого изображения и метаданные (метаданные редактирования), может быть получен как файл неподвижного изображения, предназначенный для записи на носителе записи, как показано на чертеже.
На фиг.42 показан пример структуры устройства редактирования, предназначенного для редактирования файла неподвижного изображения, сформированного устройством, показанным на фиг.41.
Устройство 110 редактирования, показанное на фиг.42, снимает данные файла неподвижного изображения и вводит эти данные в блок 111 разделения метаданных. Блок 111 разделения метаданных отделяет данные снятого изображения, соответствующие основной части файла, от метаданных в данных файла неподвижного изображения. Метаданные, полученные в результате разделения, выводят в блок 112 анализа метаданных, в то время как снятые данные изображения выводят в блок 113 обрезки.
Блок 112 анализа метаданных выполняет обработку анализа полученных метаданных. Во время анализа метаданных редактирования в процессе анализа блок 112 анализа метаданных распознает участок обрезки изображения, где была получена соответствующая конфигурация изображения. Затем блок 112 анализа метаданных выводит информацию инструкции обрезки об обрезке распознанной части изображения в блок 113 обрезки.
Блок 113 обрезки выполняет обработку изображения для выделения части изображения, обозначенной информацией инструкции обрезки, введенной из блока 112 анализа метаданных, из данных снятого изображения, введенных из блока 111 разделения метаданных, и выводит выделенный участок изображения как отредактированные данные снятого изображения, которые представляют собой часть независимых данных изображения.
В соответствии с системой, включающей в себя устройство формирования изображения и устройство редактирования, показанное на фиг.41 и 42, исходные данные неподвижного изображения, получаемые в результате съемки (данные снятого изображения), могут быть сохранены без обработки, и также может быть выполнено редактирование путем выделения части изображения, которое соответствует соответствующей конфигурации изображения, из исходных данных неподвижного изображения, используя метаданные. Кроме того, такой участок изображения, который требуется выделить, который соответствует соответствующей конфигурации изображения, может быть определен автоматически, так что пользователь может очень легко выполнять редактирование.
Функция устройства редактирования, показанная на фиг.42, может представлять собой функцию редактирования изображения в приложении, предназначенном для редактирования данных изображения, установленном, например, в персональном компьютере, и в приложении, предназначенном для управления данными изображения.
На фиг.43 представлен пример применения структуры определения конфигурации изображения в соответствии с вариантом воплощения устройства формирования изображения, которое выполнено с возможностью съемки/записи движущихся изображений, таком как видеокамера.
Данные движущегося изображения вводят в устройство 120 формирования изображения, показанное на фиг.43. Данные движущегося изображения генерируют на основе сигнала изображения, полученного путем съемки, выполняемой с помощью модуля формирования изображения, включенного в устройство 120 формирования изображения. Данные движущегося изображения вводят в блок 122 определения конфигурации изображения и в блок 124 записи движущегося изображения в устройстве 120 формирования изображения.
В этом случае, блок 122 определения конфигурации изображения соответствует блоку 200 определения конфигурации изображения, показанному на фиг.2. Блок 122 определения конфигурации изображения постоянно выполняет процесс определения конфигурации изображения для изображений, составляющих данные движущегося изображения, подаваемых в него. Кроме того, блок 122 определения конфигурации изображения сравнивает содержание фактического изображения для изображения, представляющего собой данные движущегося изображения, с соответствующей конфигурацией изображения, полученной как результат определения, в результате чего определяют различие (степень схожести) между ними и определяют хорошую или плохую конфигурацию.
В результате сравнения, если степень схожести между конфигурацией изображения, полученной в фактически снятом изображении, и определенной соответствующей конфигурацией изображения имеет определенное значение или больше, конфигурацию изображения определяют как приемлемую. С другой стороны, если степень схожести меньше, чем определенное значение, изображение определяют как неприемлемое.
Когда определяют, что данные движущегося изображения имеют приемлемую конфигурацию изображения, блок 122 определения конфигурации изображения выводит в блок 123 формирования метаданных информацию (информацию, обозначающую часть с приемлемой конфигурацией изображения), обозначающую часть изображения, где была получена приемлемая конфигурация изображения (часть с приемлемой конфигурацией изображения) в данных движущегося изображения. Информация, обозначающая часть с приемлемой конфигурацией изображения, представляет собой, например, информацию, обозначающую исходное положение и конечное положение части с приемлемой конфигурацией изображения в данных движущегося изображения.
Затем блок 122 определения конфигурации изображения содержит информацию предыстории результата определения для конфигурации изображения, но не формирует информацию, обозначающую часть с приемлемой конфигурацией изображения, в соответствии с результатом определения исчерпанной конфигурации изображения на основе информации предыстории результата определения. В соответствии с этим, можно предотвратить определение частей с приемлемой конфигурацией изображения для изображений, имеющих аналогичную конфигурацию.
В этом случае блок 123 формирования метаданных генерирует различные части необходимых метаданных, относящихся к данным движущегося изображения, которые были записаны как файл на носитель записи в блоке 124 записи движущегося изображения, описанном ниже. При приеме информации, обозначающей часть с приемлемой конфигурацией изображения, из блока 122 определения конфигурации изображения, как описано выше, блок 123 формирования метаданных генерирует метаданные, обозначающие, что часть изображения, обозначенная как информация, обозначающая часть с приемлемой конфигурацией изображения, имеет приемлемую конфигурацию изображения, и выводит метаданные в блок 124 записи движущегося изображения.
Блок 124 записи движущегося изображения выполняет управление для записи данных движущегося изображения, подаваемых в него, на носитель записи таким образом, что данными движущегося изображения управляют как файлом движущегося изображения с заданным форматом. Когда метаданные выводят из блока 123 формирования метаданных, блок 124 записи движущегося изображения выполняет такое управление, что метаданные записывают, будучи включенным в метаданные, прикрепленные к файлу движущегося изображения.
В соответствии с этим, как показано на фиг.43, файл движущегося изображения, записанный на носителе записи, включает в себя данные движущегося изображения, полученные в результате съемки, и метаданные, обозначающие часть изображения, где была получена приемлемая конфигурация изображения.
Часть изображения, которая обозначена метаданными, как описано выше, и которая имеет приемлемую конфигурацию изображения, может представлять собой часть движущихся изображений, имеющих определенную длительность по времени, или может представлять собой неподвижное изображение, выделенное из данных движущегося изображения. Вместо метаданных могут быть сгенерированы данные движущегося изображения или данные неподвижного изображения для части изображения, где была получена приемлемая конфигурация изображения, и сгенерированные данные могут быть записаны как вторичные данные изображения, прикрепленные к файлу движущегося изображения (или к файлу, независимому от файла движущегося изображения).
В структуре, в которой устройство 120 формирования изображения включает в себя блок 122 определения конфигурации изображения, как показано на фиг.43, только часть движущегося изображения, определенная как часть приемлемой конфигурации изображения блоком 122 определения конфигурации изображения, может быть записана как файл движущегося изображения. Кроме того, данные изображения, соответствующие части изображения, определенные как имеющие приемлемую конфигурацию изображения, блоком 122 определения конфигурации изображения, могут быть выведены во внешнее устройство через интерфейс данных или тому подобное.
Кроме того, устройство 130 печати, показанное на фиг.44, можно применять в устройстве, соответствующем устройству 100 формирования изображения, показанному на фиг.41, помимо устройства редактирования, представленного на фиг.42.
В этом случае устройство 130 печати получает файл неподвижного изображения как изображение, предназначенное для печати. Файл неподвижного изображения включает в себя файл, сгенерированный и записанный устройством 100 формирования изображения, и включает в себя содержание данных изображения, как неподвижного изображения, и метаданных, как представлено на чертеже. Поэтому метаданные включают в себя метаданные редактирования конфигурации изображения того же содержания, что и файл неподвижного изображения, показанный на фиг.41 и 42.
Принятый файл передают в блок 131 разделения метаданных. Аналогично блоку 111 разделения метаданных, показанному на фиг.42, блок 131 разделения метаданных отделяет данные изображения, соответствующие основной части файла, от метаданных, прикрепленных к нему в данных файла неподвижного изображения. Метаданные, полученные в результате разделения, выводят в блок 132 анализа метаданных, в то время как данные изображения выводят в блок 133 обрезки.
Блок 132 анализа метаданных выполняет такую же обработку анализа, которую выполнял блок 112 анализа метаданных, показанный на фиг.42, для полученных метаданных, и выводит информацию инструкции обрезки в блок 133 обрезки.
Так же, как и блок 113 обрезки, показанный на фиг.42, блок 133 обрезки выполняет обработку изображения для выделения части изображения, обозначенной информацией инструкции обрезки, вводимой из блока 132 анализа метаданных из данных изображения, выводимых из блока 131 разделения метаданных. Затем блок 133 обрезки выводит в блок 134 управления печатью, данные изображения в формате печати, сгенерированные из выделенной части изображения, как данные изображения, предназначенные для печати.
Блок 134 управления печатью выполняет управление, обеспечивающее работу механизма печати (здесь не показан), используя выводимые данные изображения, предназначенные для печати.
Во время такой операции часть изображения, имеющую соответствующую конфигурацию изображения, автоматически выделяют из всего изображения данных входного изображения и печатают как изображение в устройстве 130 печати.
Структуру определения конфигурации изображения в соответствии с вариантом воплощения настоящего изобретения можно применять в других различных устройствах, системах и программных приложениях, кроме систем формирования изображения и устройств формирования изображения, описанных выше.
Описанный выше вариант воплощения основан на предположении, что субъект (целевой индивидуальный субъект) представляет собой человека. Однако вариант воплощения настоящего изобретения можно применять в случае, когда субъект представляет собой животное, а не человека.
Как описано выше, по меньшей мере, часть структуры на основе варианта воплощения настоящего изобретения может быть реализована, обеспечивая возможность выполнения программы в ЦПУ или ЦПС.
Такая программа может быть записана и сохранена в ПЗУ или тому подобное во время изготовления устройства. В качестве альтернативы, программа может быть сохранена на съемном носителе записи и затем может быть сохранена в области энергонезависимого сохранения или в запоминающем устройстве 30 типа флэш, которое совместимо с ЦПС, путем установки (включая в себя обновление) ее с носителя записи. В качестве альтернативы, программа может быть установлена через интерфейс данных, такой как USB (УПШ, универсальная последовательная шина) или IEEE 1394, под управлением другого ведущего устройства. Кроме того, программа может быть сохранена в носителе записи в сервере через сеть и может быть получена путем загрузки ее с сервера, если в цифровой фотокамере 1 обеспечена функция подключения к сети.
Настоящее изобретение содержит предмет изобретения, относящийся к раскрытому в приоритетной заявке на японский патент JP 2008-166243, поданной в Патентное ведомство Японии 25 июня 2008 г., полное содержание которой приведено здесь в качестве ссылочного материала.
Для специалиста в данной области техники должно быть понятно, что различные модификации, комбинации, подкомбинации и изменения могут возникать в зависимости от требований к конструкции и других факторов, если только они находятся в пределах объема приложенной формулы изобретения или ее эквивалентов.
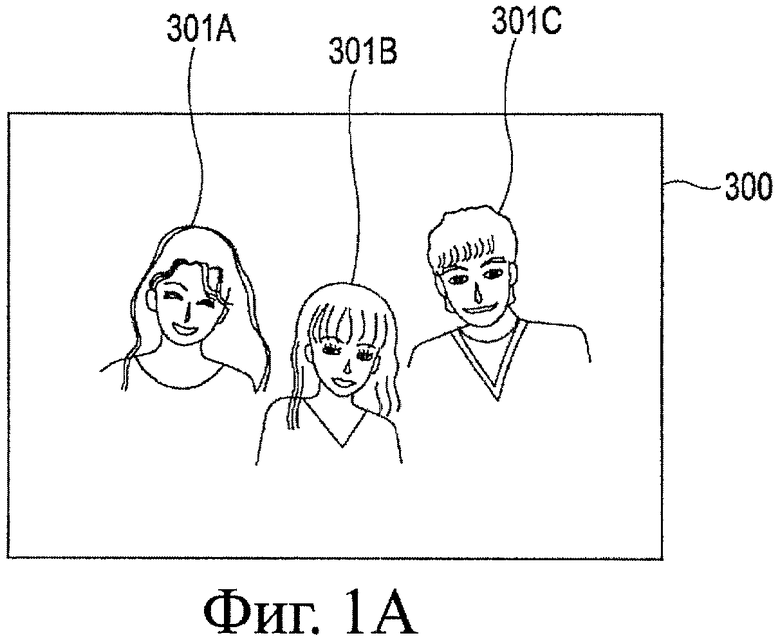
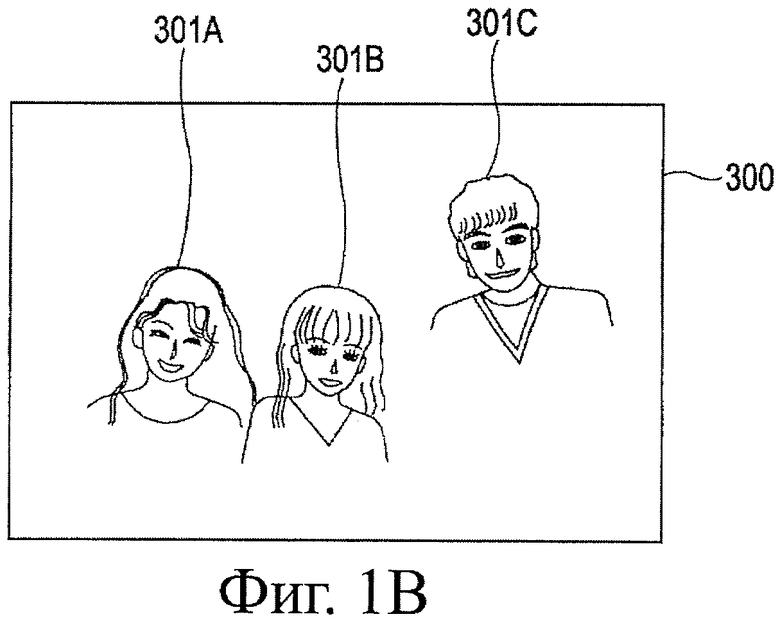
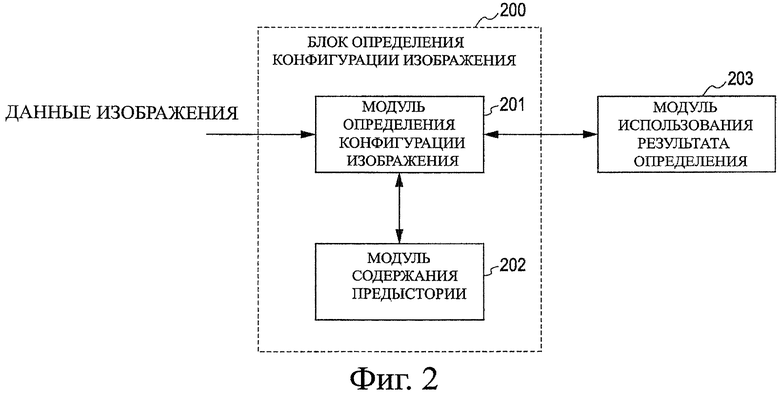
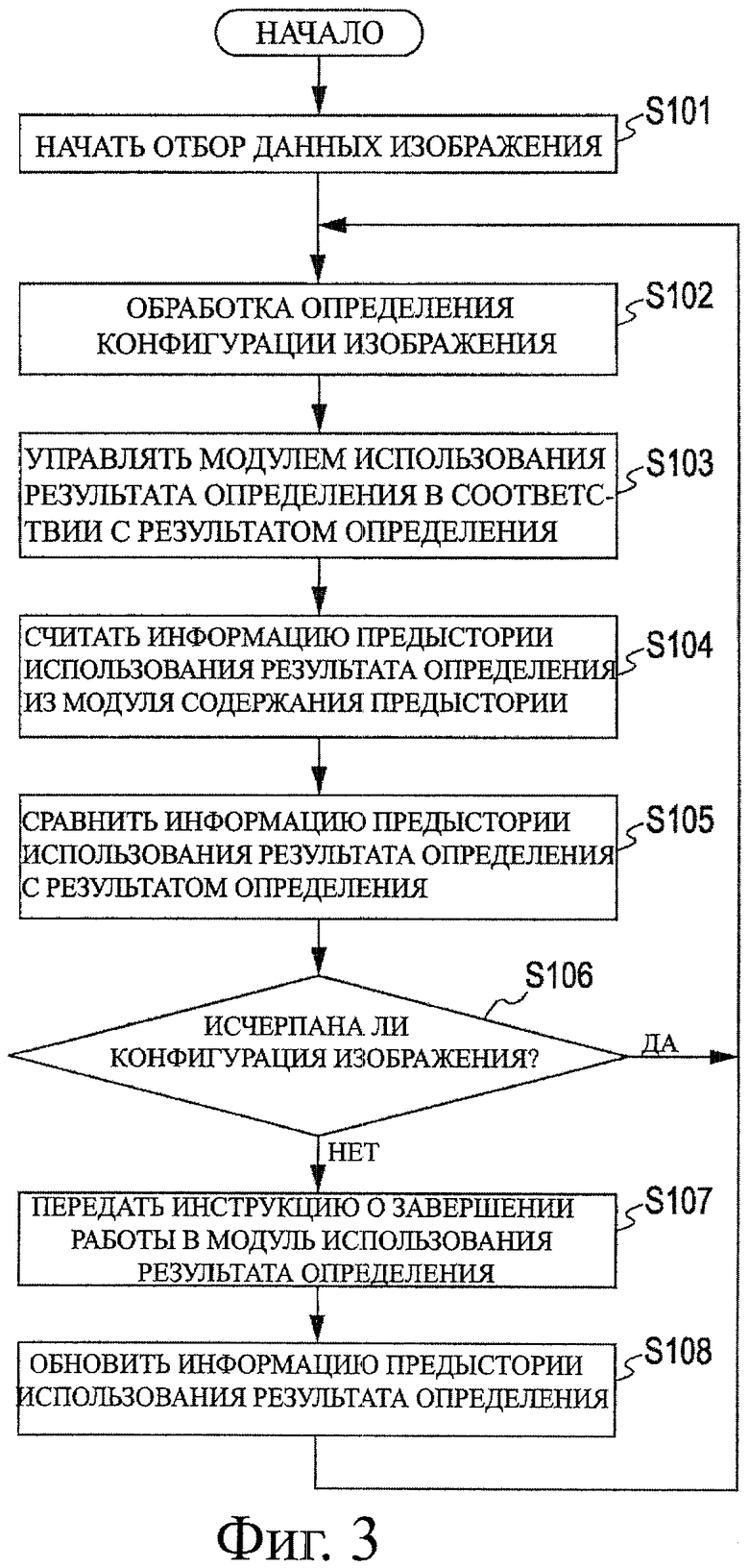
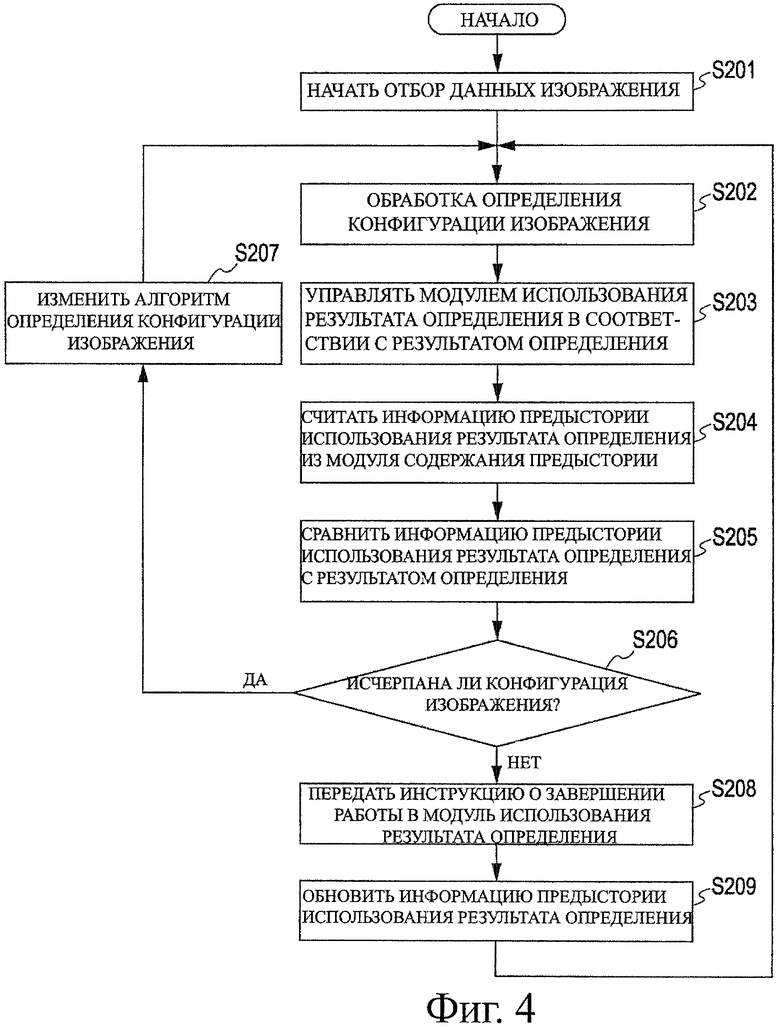
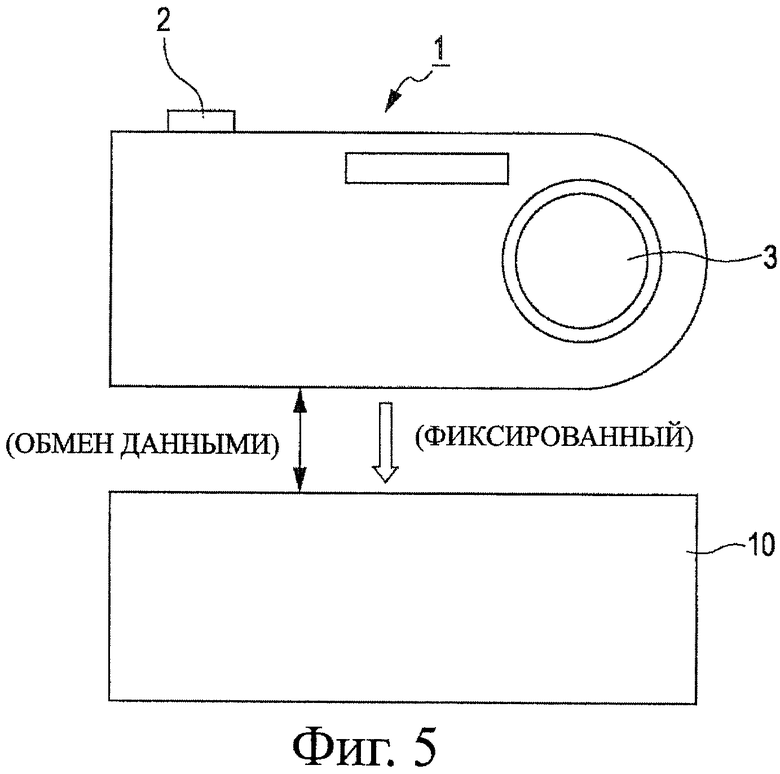
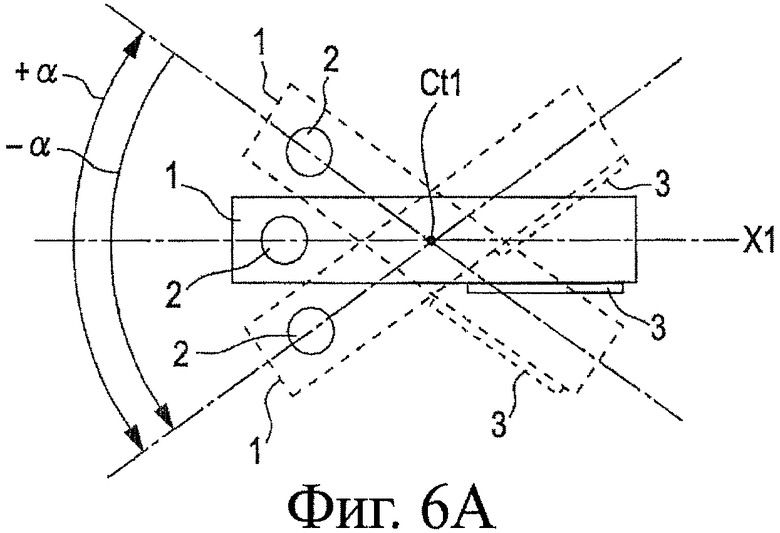
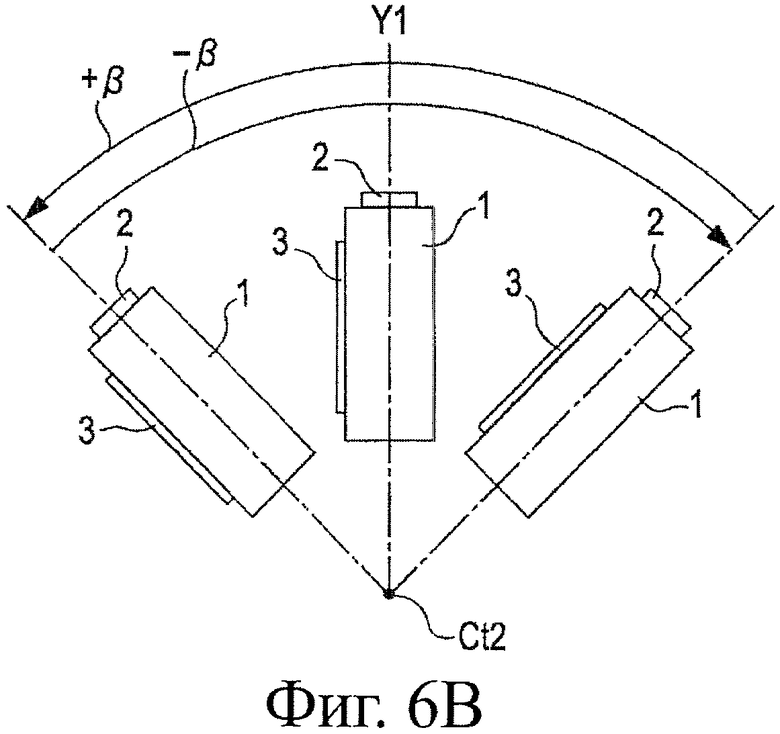
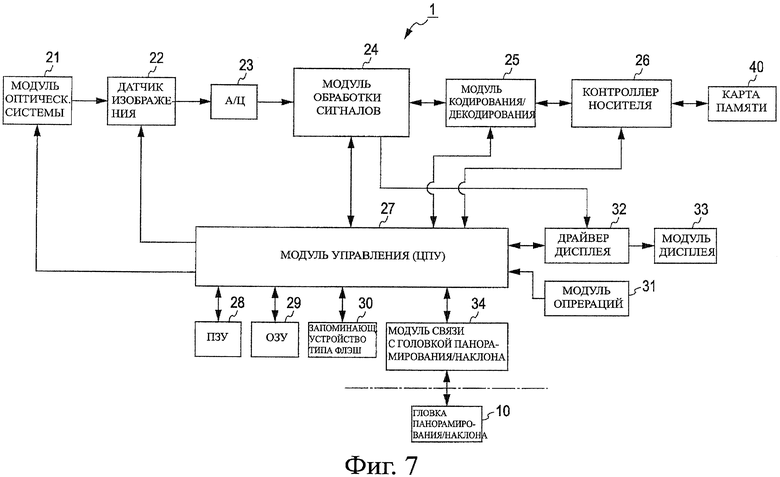
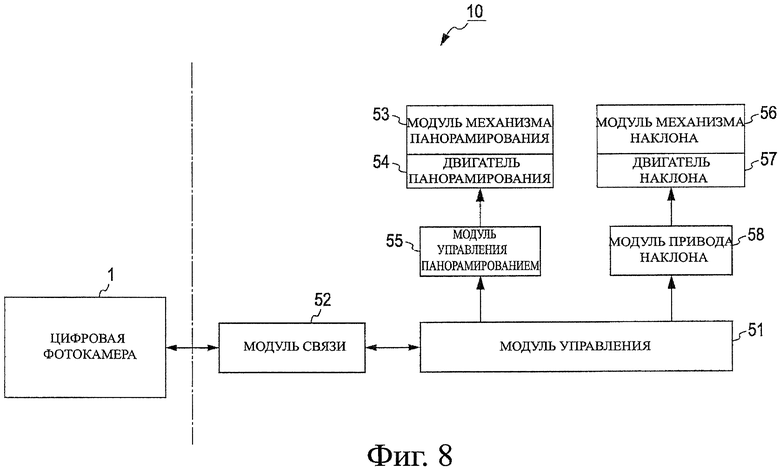
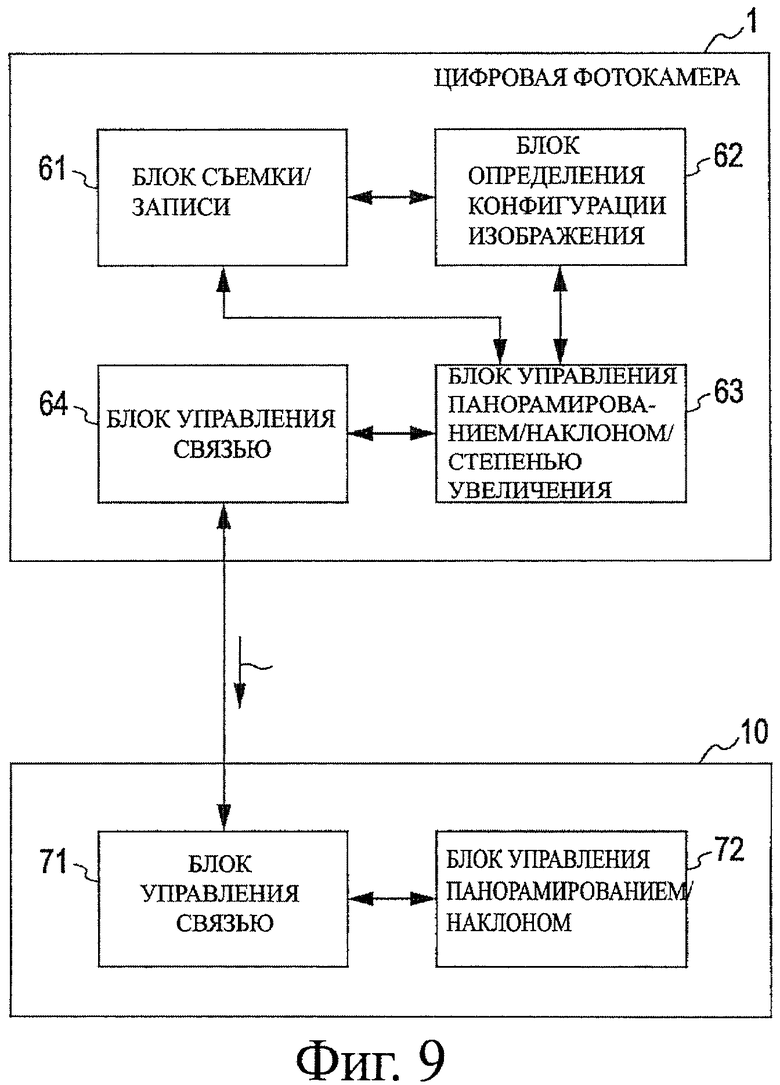
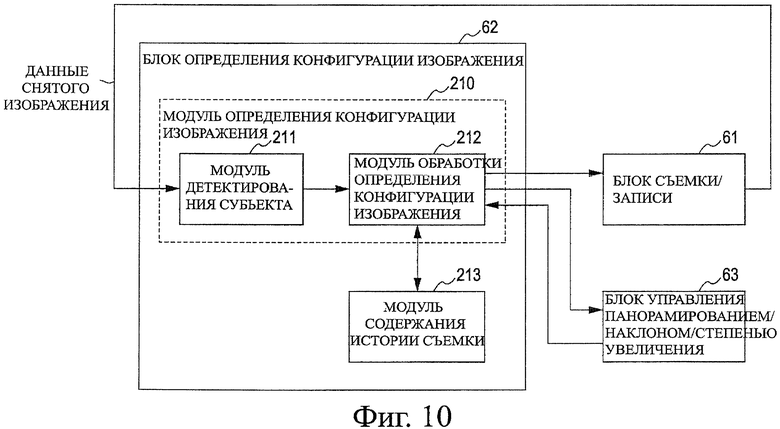
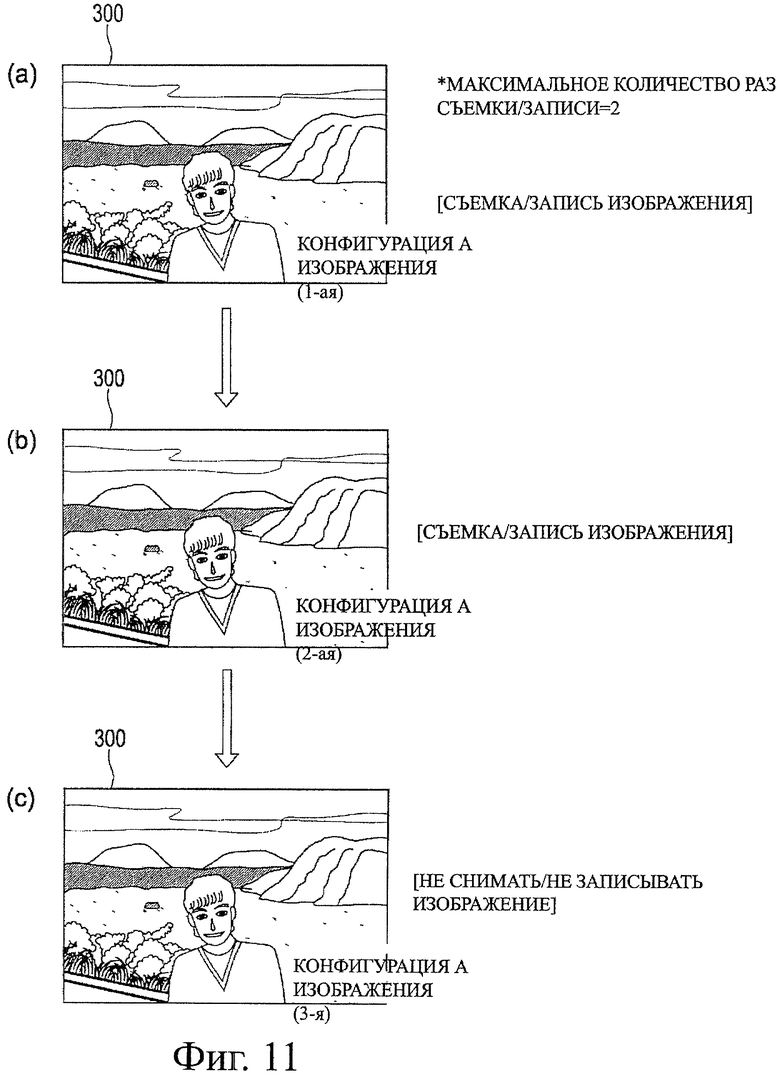
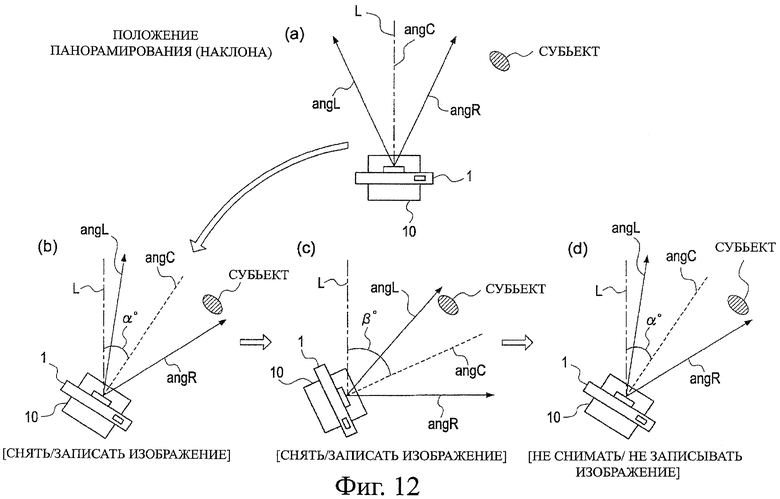
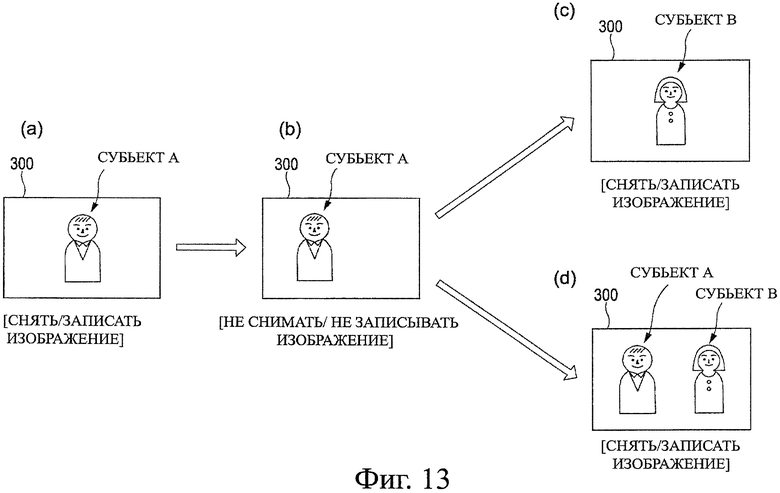
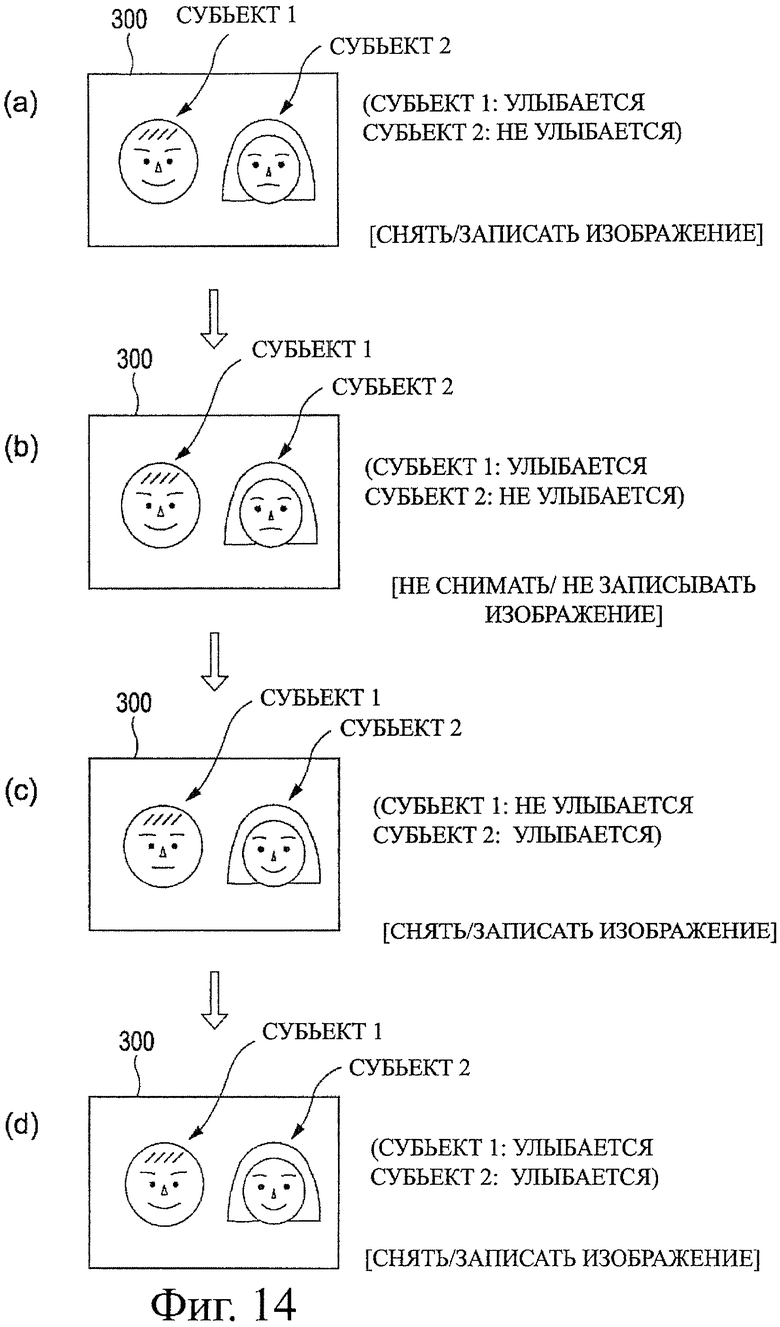
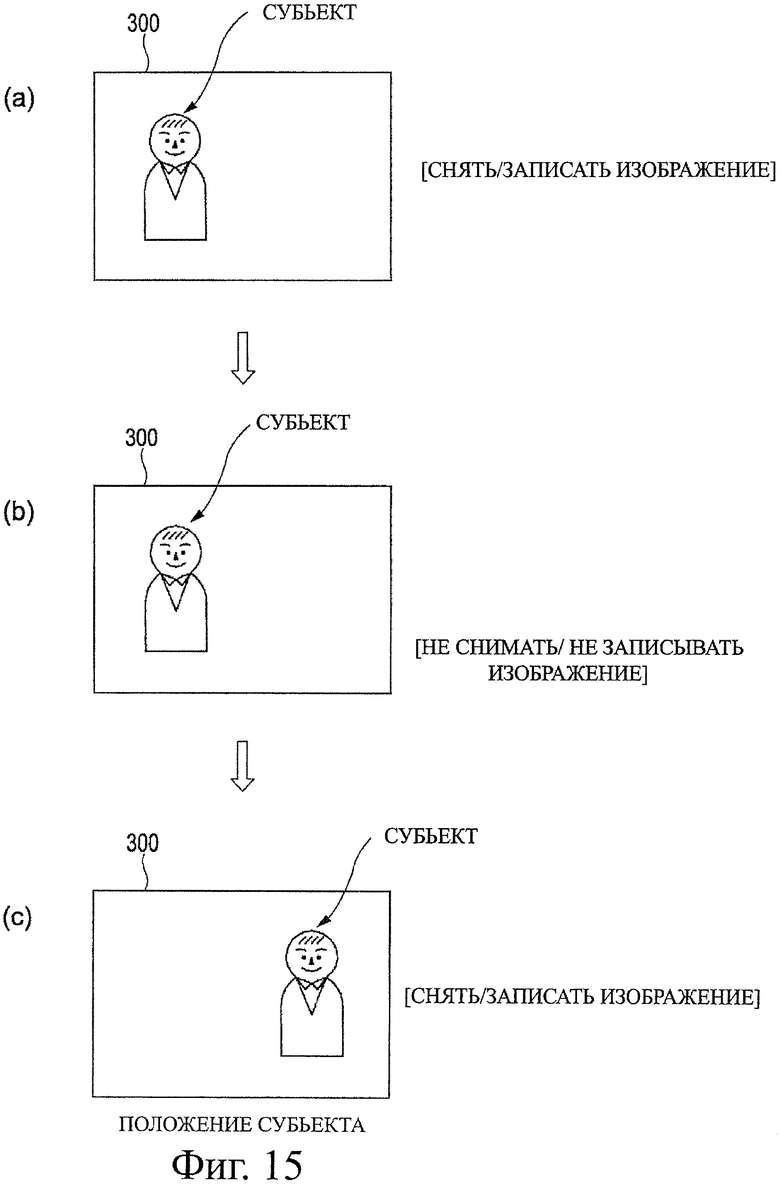
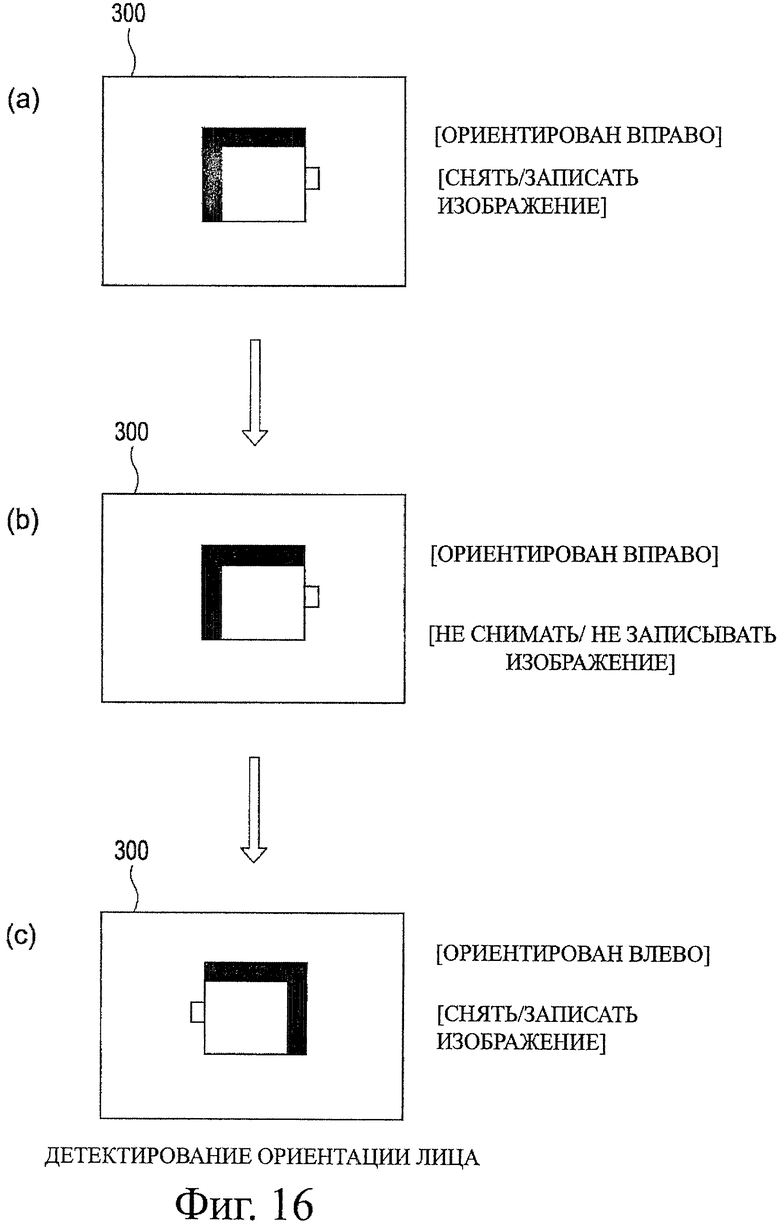

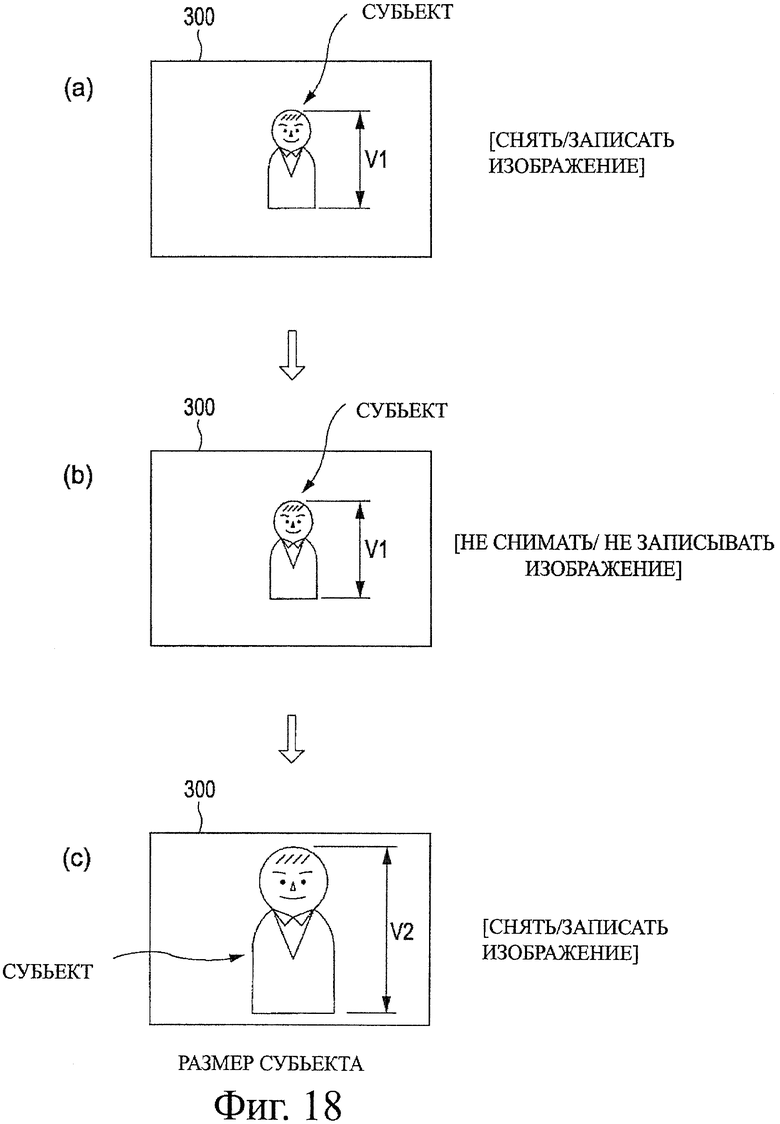
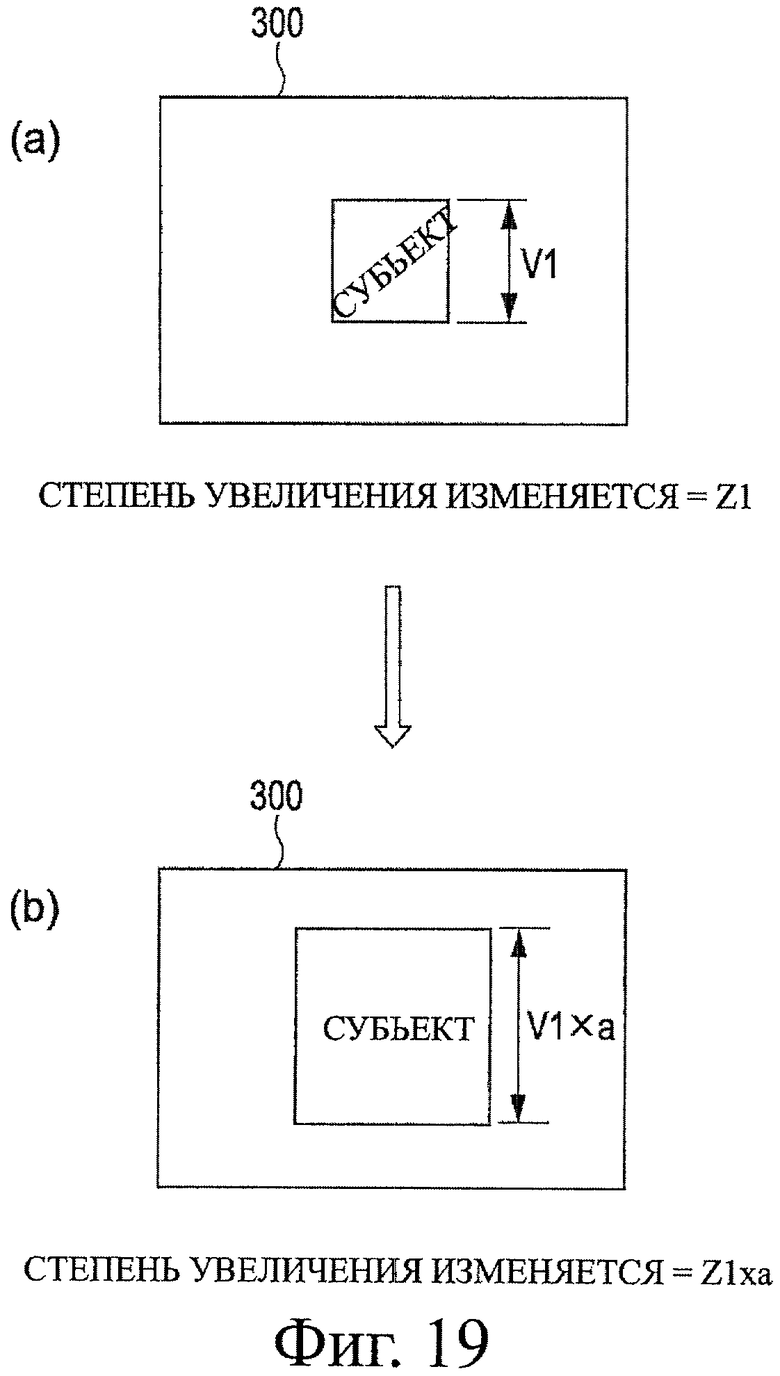
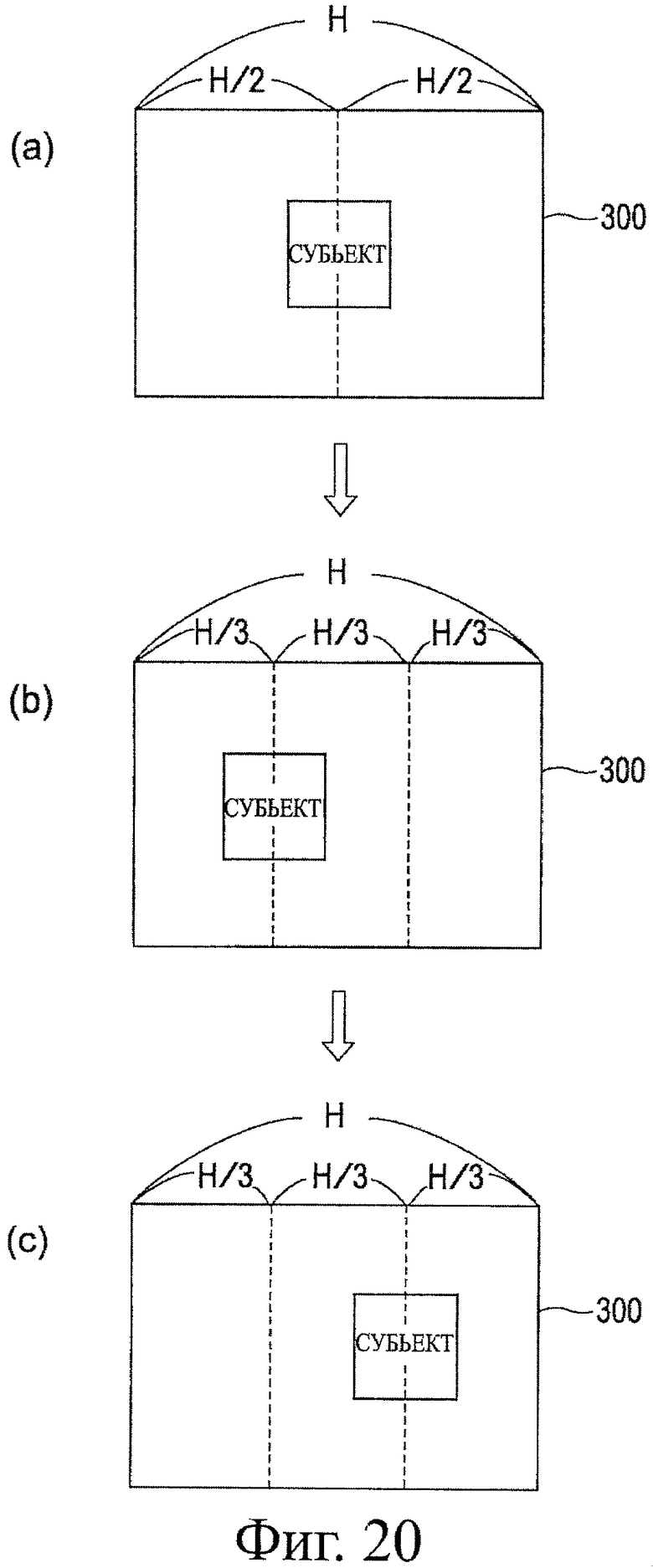
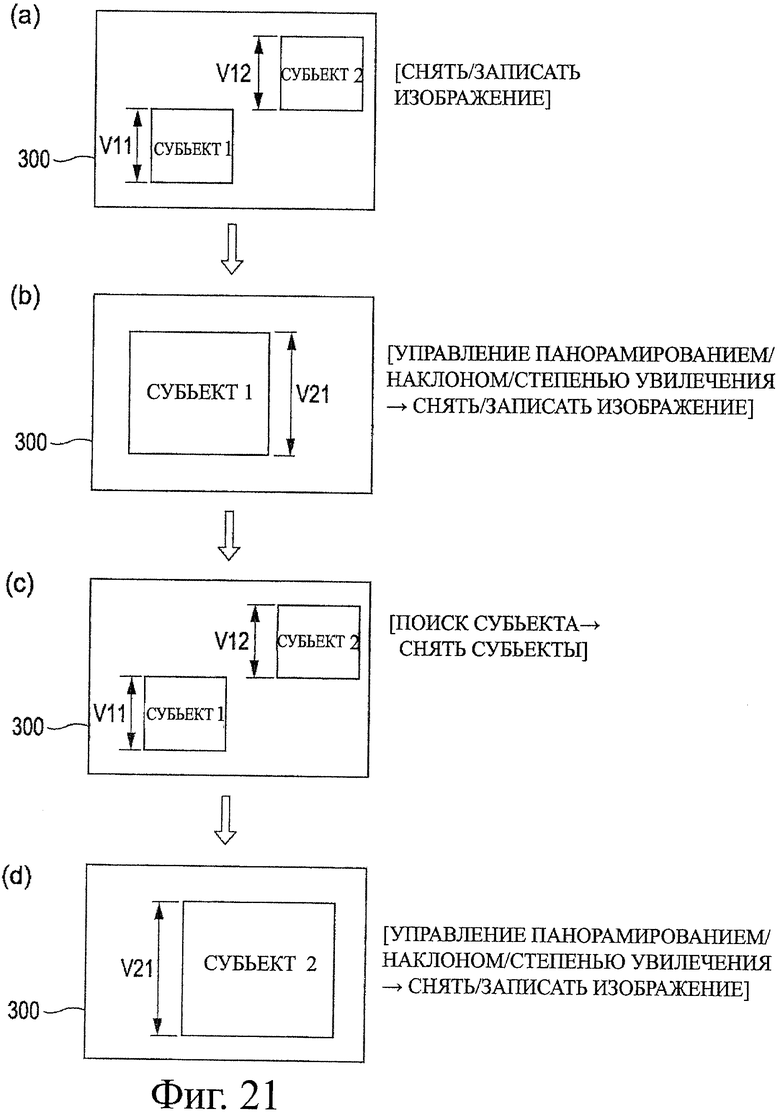
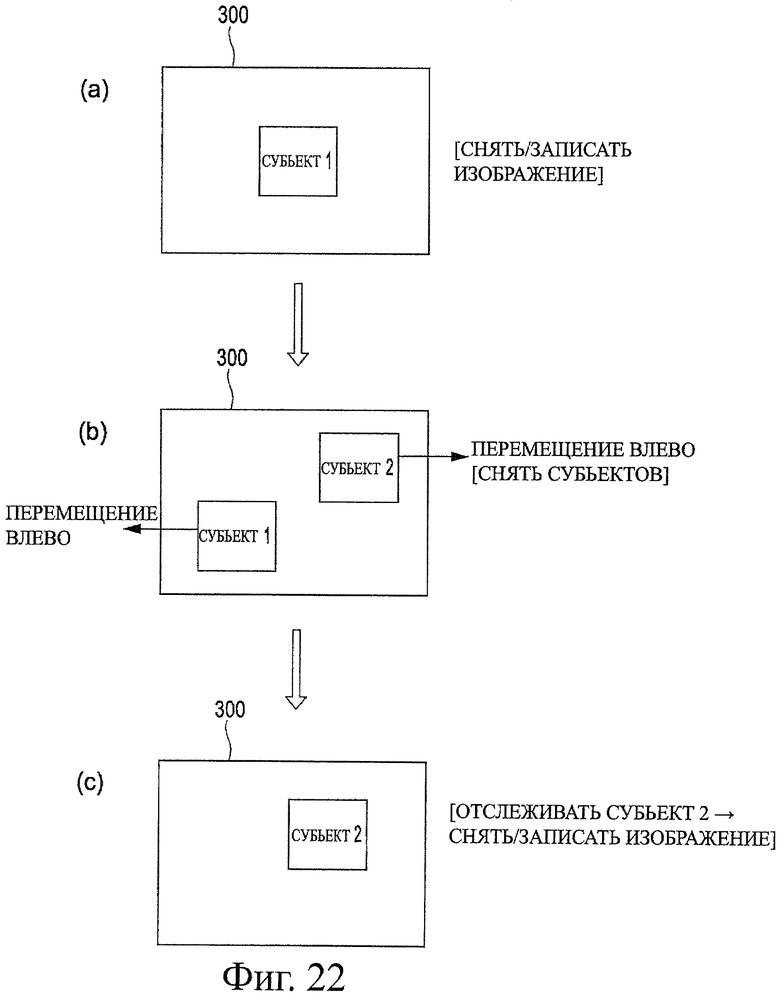
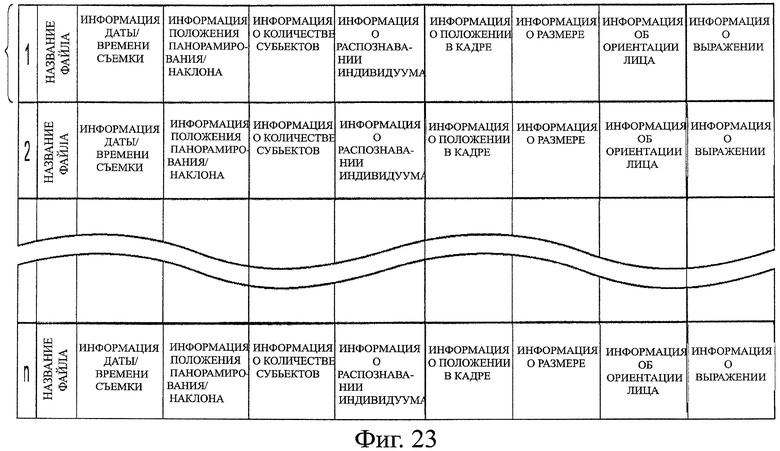
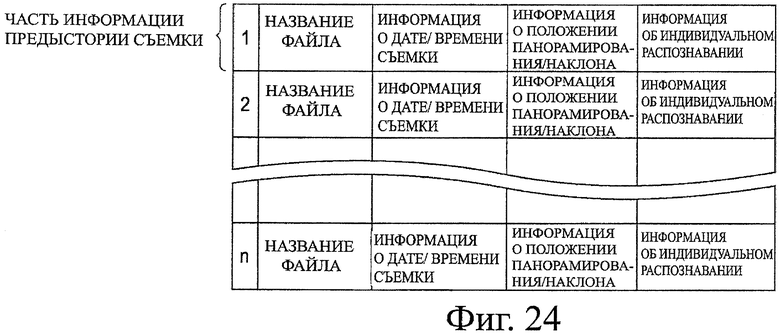

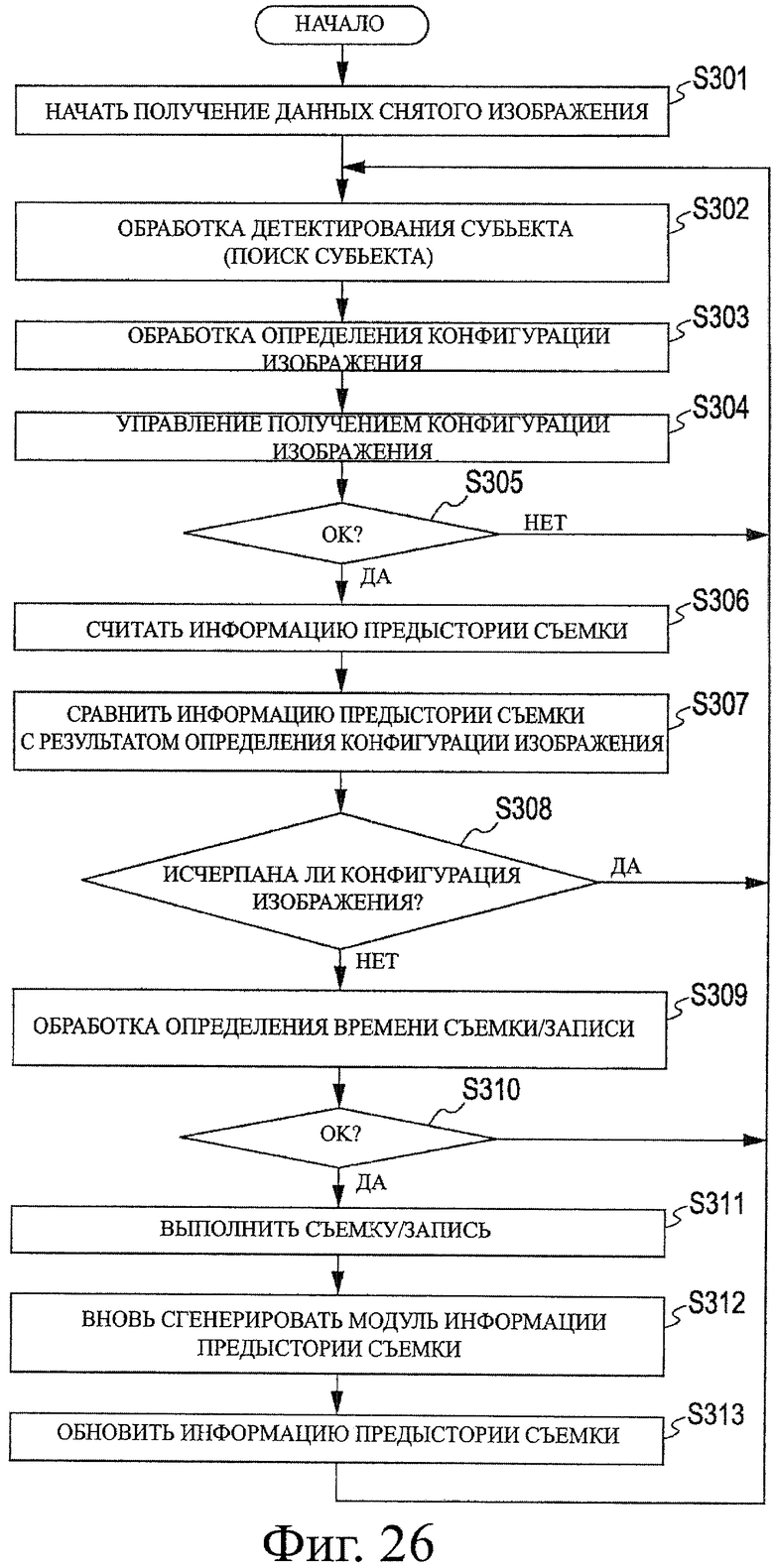
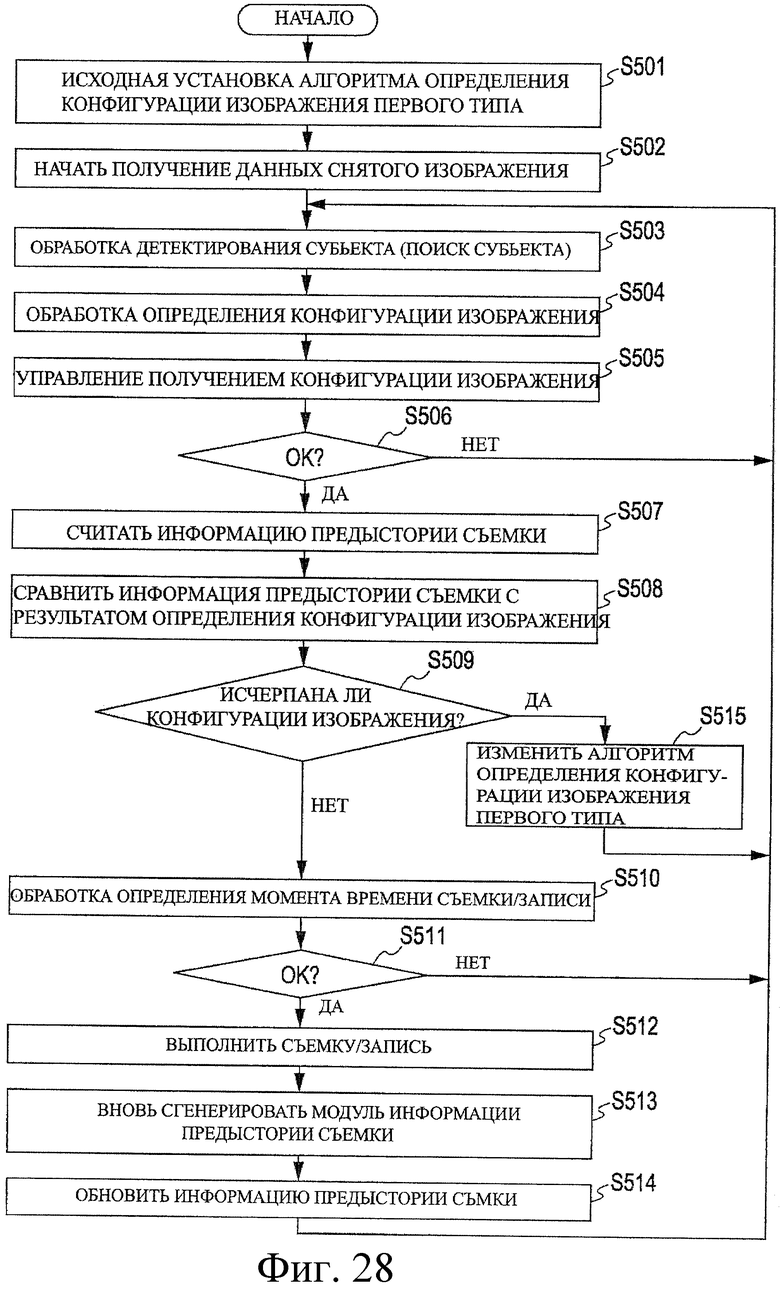
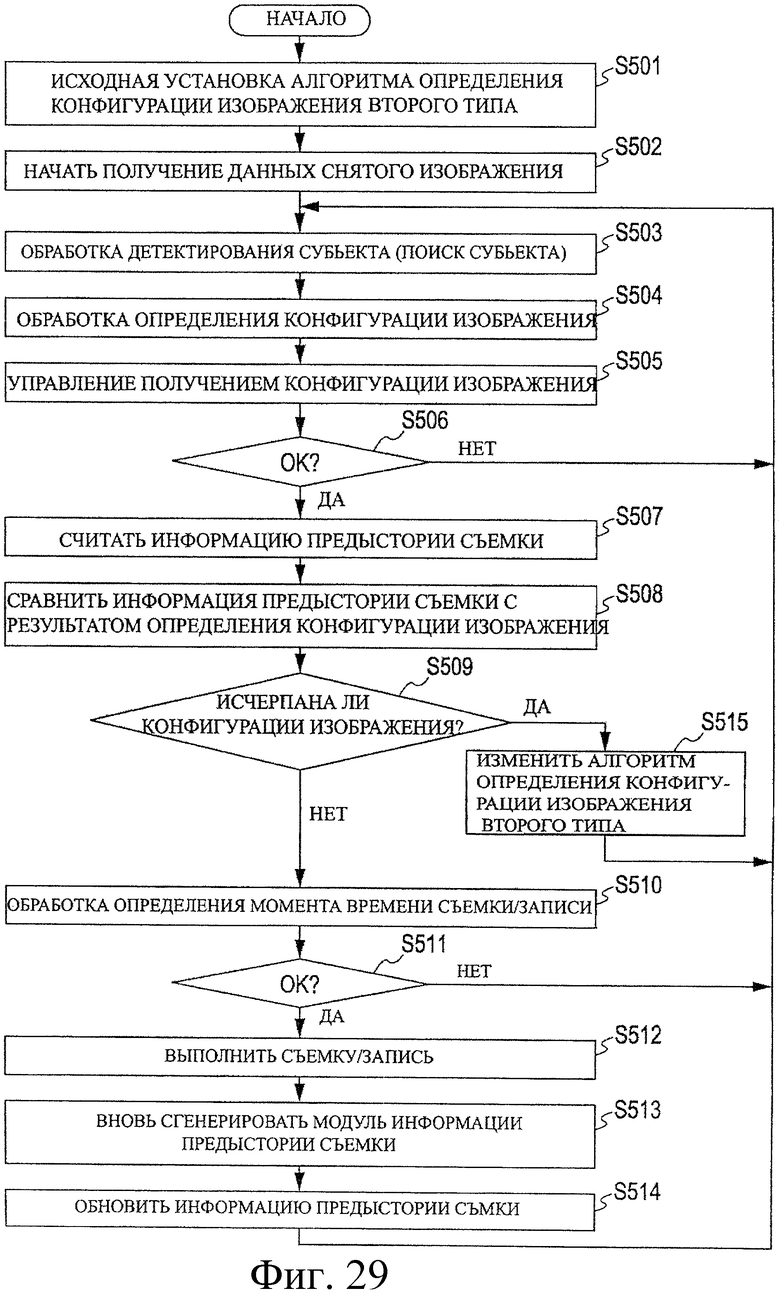
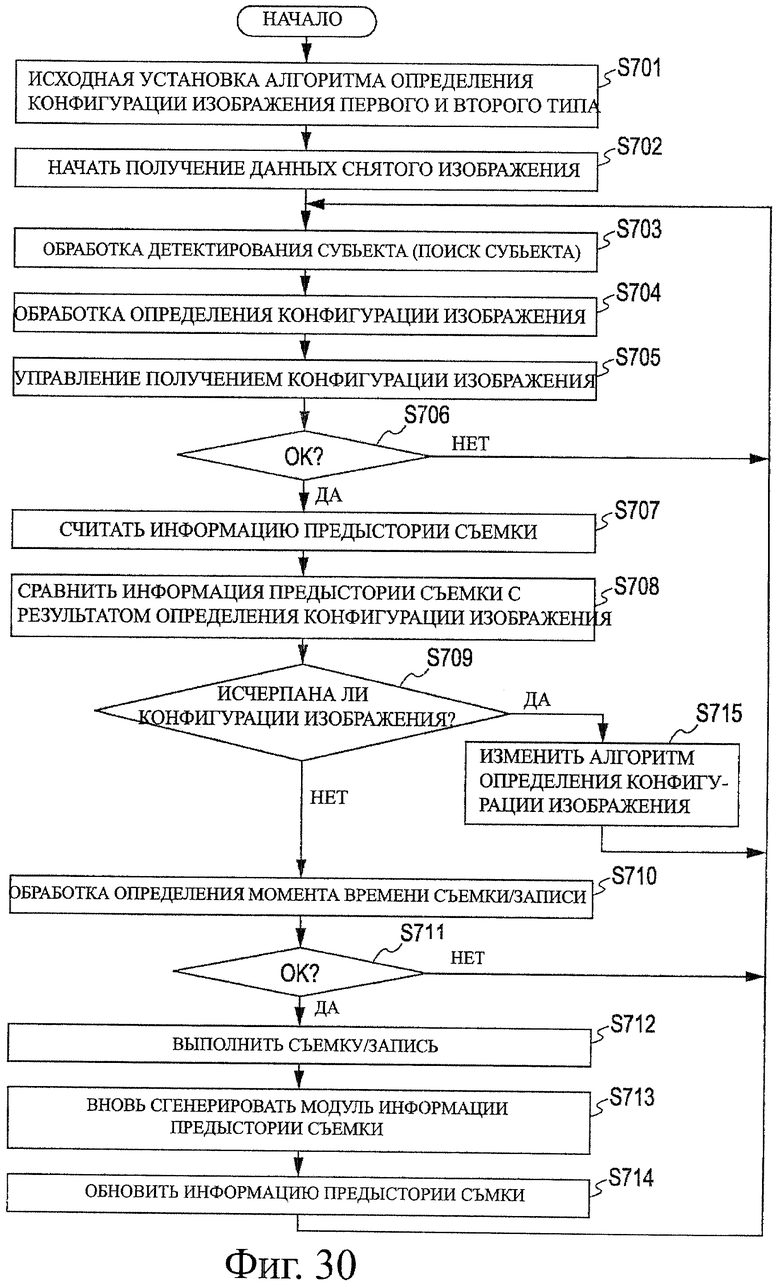
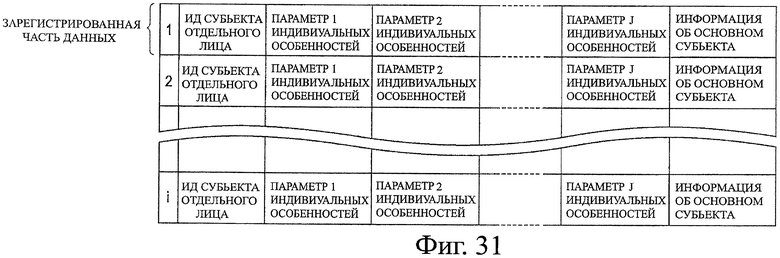
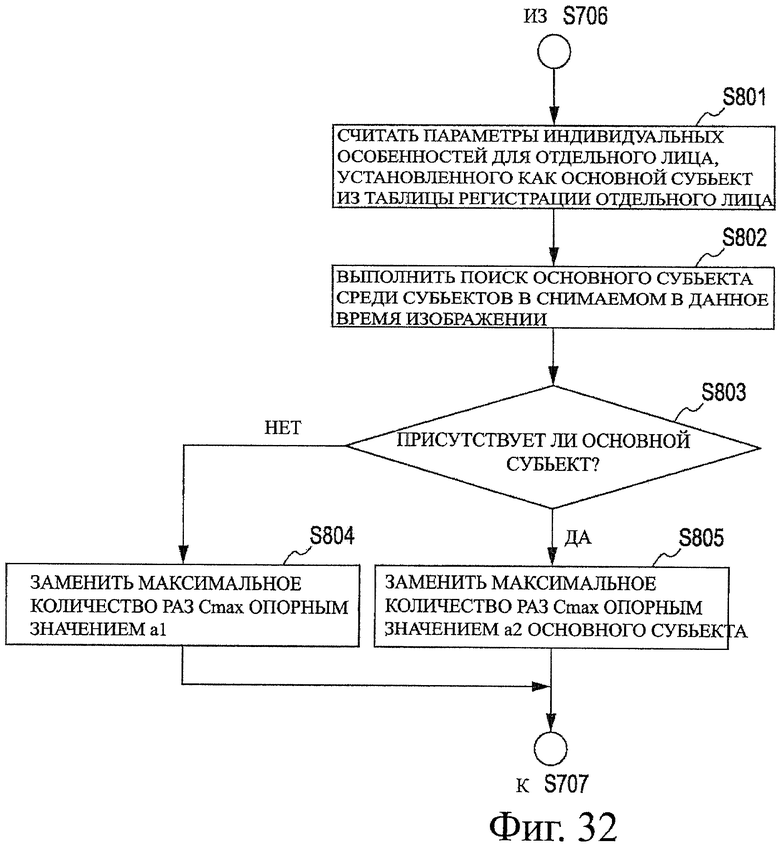
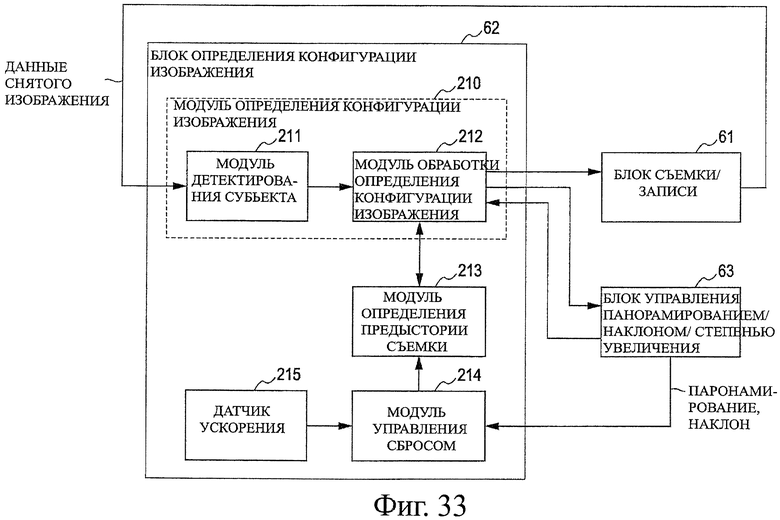
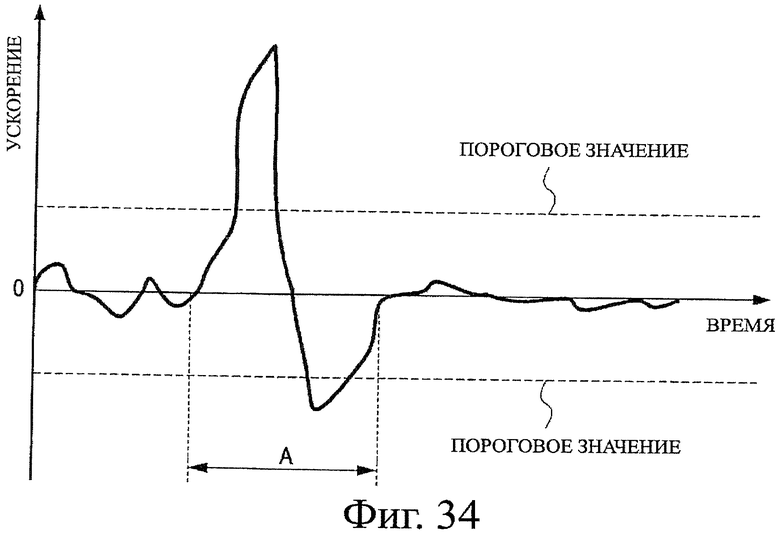
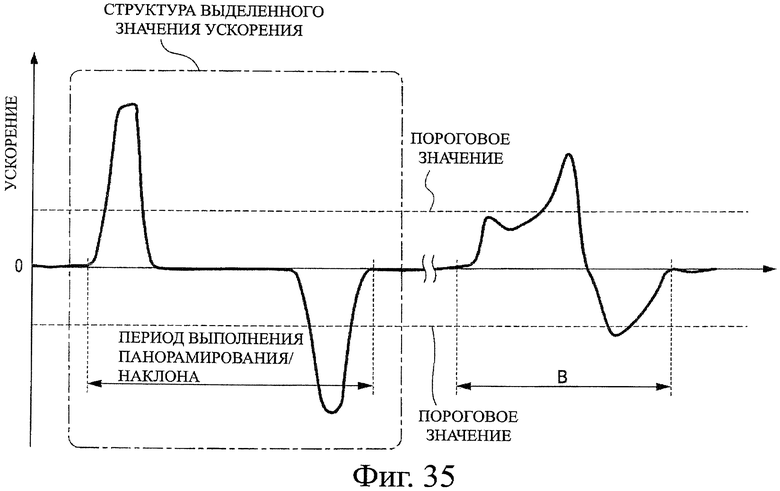
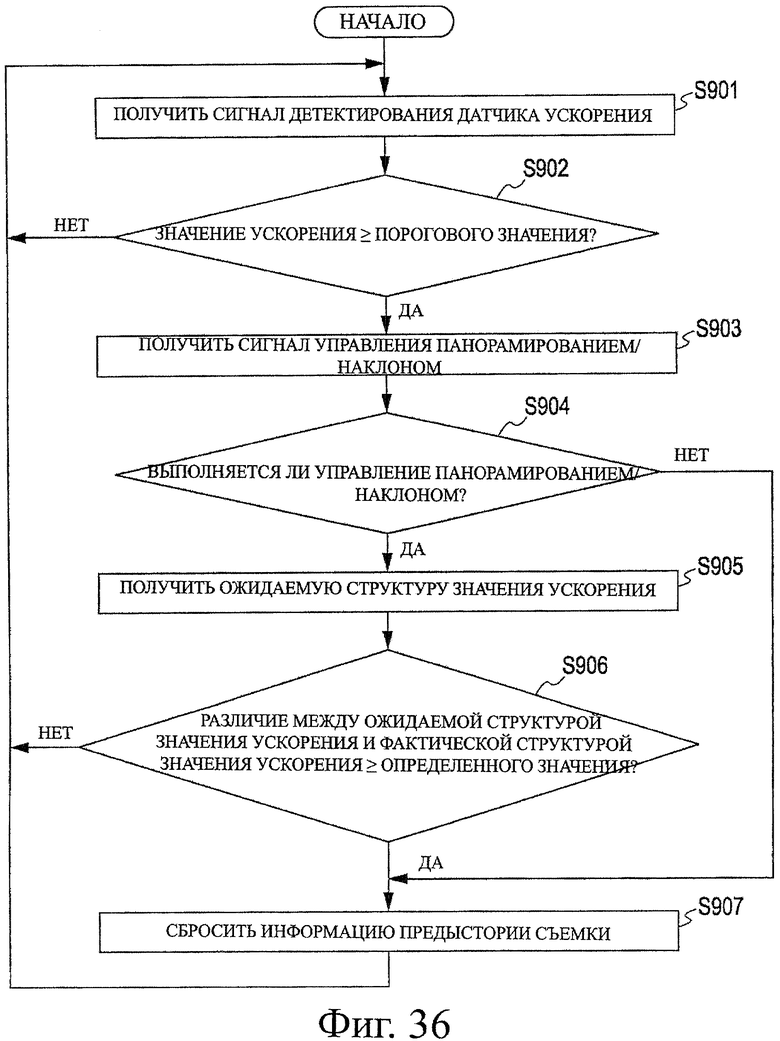

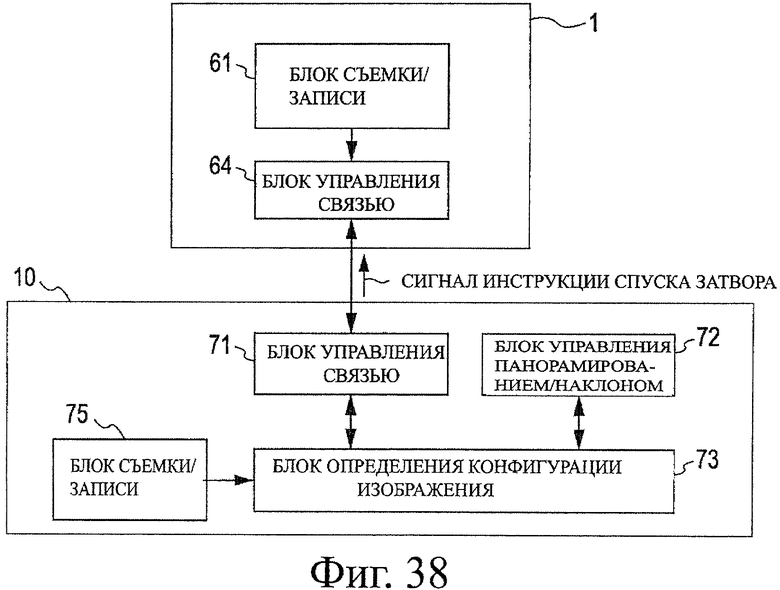

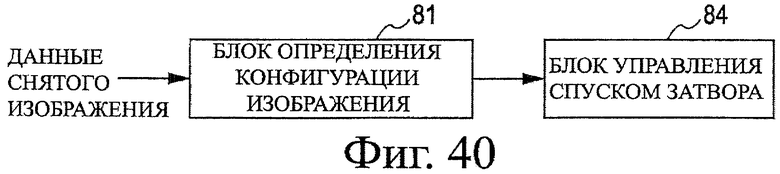
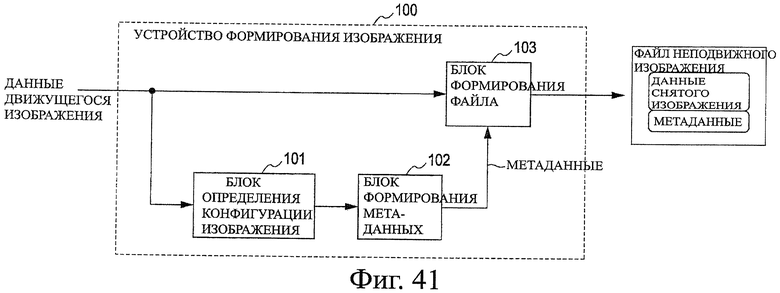
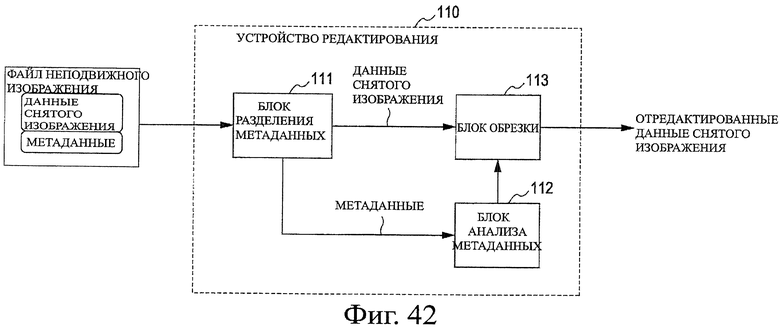
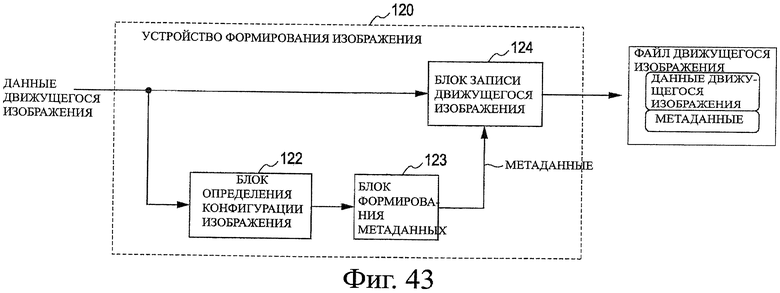
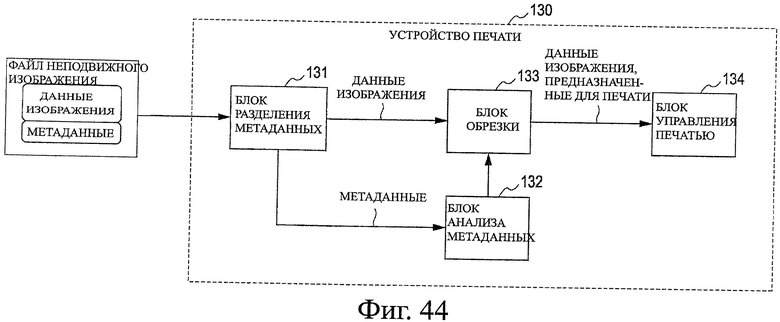
Изобретение относится к средствам записи и обработки изображений. Техническим результатом является создание средства записи и обработки изображений, которое определяет содержание изображения, для предотвращения получения избыточного изображения аналогичного содержания. Результат достигается тем, что устройство записи изображения включает в себя модуль формирования изображения, предназначенный для получения данных снятого изображения; модуль определения конфигурации изображения, предназначенный для определения соответствующей конфигурации изображения; модуль управления получением конфигурации изображения, предназначенный для выполнения управления получением конфигурации изображения, для получения данных снятого изображения для содержания изображения, имеющего соответствующую конфигурацию изображения; модуль съемки/записи, предназначенный для записи данных снятого изображения, когда будут получены данные снятого изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения; модуль содержания информации предыстории съемки, предназначенный для содержания информации предыстории съемки; модуль определения исчерпания конфигурации изображения, предназначенный для определения, были ли записаны данные снятого изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, заданное количество раз; и модуль установки записи, предназначенный для предотвращения записи данных снятого изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, определенную как записанную заданное количество раз. 6 н. и 6 з.п. ф-лы, 47 ил.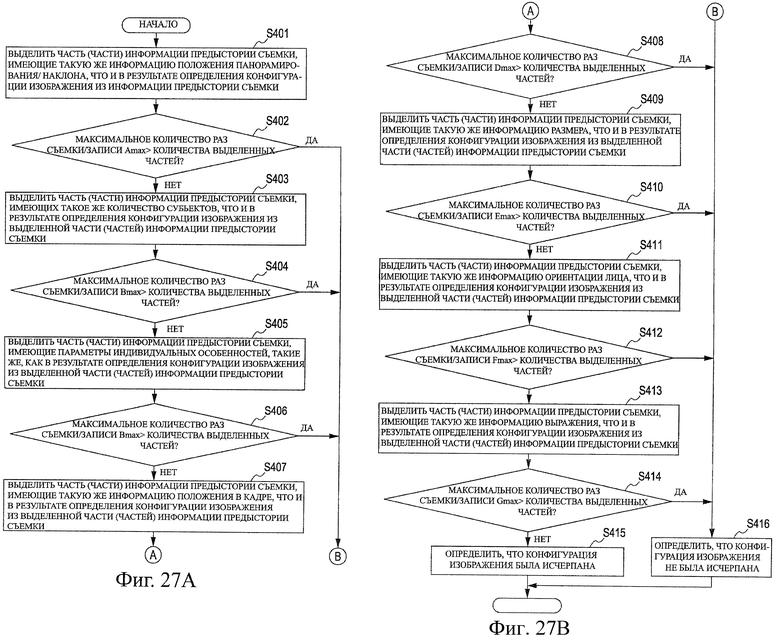
1. Устройство записи изображения, содержащее
модуль формирования изображения, предназначенный для получения в результате съемки данных снятого изображения;
средство определения конфигурации изображения, предназначенное для определения соответствующей конфигураций изображения на основе содержания изображения данных снятого изображения;
средство управления получением конфигурации изображения, предназначенное для выполнения управления получением конфигурации изображения, для получения данных снятого изображения содержания изображения, имеющего соответствующую конфигурацию изображения, определенную средством определения конфигурации изображения;
средство съемки/записи, предназначенное для записи данных снятого изображения на носителе записи в момент времени, когда данные снятого изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, получают в результате выполнения управления получением; конфигурации изображения;
средство содержания информации предыстории съемки, предназначенное для содержания информации предыстории съемки, которая представляет собой информацию о конфигурации изображений соответствующих частей данных снятого изображения, записанных с помощью средства съемки/записи;
средство определения исчерпания конфигурации изображения, предназначенное для определения, были ли данные снятого изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, такую же, как и соответствующая конфигурация изображения, определенная средством определения конфигурации изображения, записаны заданное количество раз, путем обращения к информации предыстории съемки; и
средство установки записи, предназначенное для предотвращения записи с помощью средства съемки/записи данных снятого изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, которая была определена, как записанная заданное количество раз, средством определения исчерпания конфигурации изображения.
2. Устройство записи изображения по п.1, дополнительно содержащее
средство управления механизмом, предназначенное для управления модулем механизма, для изменения угла обзора съемки модуля формирования изображения, в котором средство управления получением конфигурации изображения выполняет, в качестве управления получением конфигурации изображения управление над средством управления механизмом для получения угла обзора съемки в соответствии с заданной соответствующей конфигурацией изображения.
3. Устройство записи изображения по п.1,
в котором средство управления получением конфигурации изображения ожидает получение содержания изображения, имеющего соответствующую конфигурацию изображения, определенную для данных снятого изображения, в качестве управления получением конфигурации изображения.
4. Устройство записи изображения по п.1,
в котором средство определения конфигурации изображения определяет соответствующую конфигурацию изображения путем изменения алгоритма для определения конфигурации изображения, когда средство определения исчерпания конфигурации изображения определяет, что запись была выполнена заданное количество раз.
5. Устройство записи изображения по п.1, дополнительно содержащее
средство изменения заданного количества, предназначенное для изменения заданного количества раз в соответствии с содержанием изображения данных снятого изображения, используемым при определении средством определения конфигурации изображения.
6. Устройство записи изображения по п.1, дополнительно содержащее
средство детектирования движения, предназначенное для детектирования движения устройства записи изображения; и средство удаления, предназначенное для удаления информации предыстории съемки, содержащейся в средстве содержания информации предыстории съемки, когда средство детектирования движения детектирует движение устройства записи изображения.
7. Устройство записи изображения по п.6,
в котором средство детектирования движения не детектирует, как движение, движение устройства записи изображения, связанное только с операцией, выполняемой модулем механизма, и
в котором, когда работает модуль механизма и устройство записи изображения перемещают с помощью другой силы, кроме силы модуля механизма, средство детектирования движения детектирует движение как движение.
8. Способ записи изображения, содержащий следующие этапы:
определяют соответствующую конфигурацию изображения на основе содержания изображения данных снятого изображения, полученных модулем формирования изображения;
выполняют управление получением конфигурации изображения для получения данных снятого изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, определенную при определении;
записывают данные снятого изображения на носителе записи в момент времени, когда получают данные снятого изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, в результате выполнения управления получением конфигурации изображения;
содержат информацию предыстории съемки, которая представляет собой информацию о конфигурациях изображения соответствующих частей данных снятого изображения, записанных при записи;
определяют, были ли данные снятого изображения содержания изображения, имеющего соответствующую конфигурацию изображения, такую же, как соответствующая конфигурация изображения, определенная при определении, записаны заданное количество раз путем ссылки к информации предыстории съемки; и
предотвращают запись данных снятого изображения содержания изображения, имеющего соответствующую конфигурацию изображения, которая была определена как записанная заданное количество раз в результате определения.
9. Устройство обработки изображения, содержащее
средство определения конфигурации изображения, предназначенное для определения соответствующей конфигурации изображения на основе содержания изображения полученных данных изображения;
средство управления получением конфигурации изображения, предназначенное для выполнения управления получением конфигурации изображения, для получения данных изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, определенную с помощью средства определения конфигурации изображения;
средство использования данных изображения, предназначенное для использования данных изображения в момент времени, когда данные изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, получают в результате выполнения управления получением конфигурации изображения;
средство содержания информации предыстории использования, предназначенное для содержания информации предыстории использования, которая представляет собой информацию о конфигурациях изображения соответствующих частей данных изображения, используемых средством использования данных изображения;
средство определения исчерпания конфигурации изображения, предназначенное для определения, были записаны ли данные изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, такую же, как соответствующая конфигурация изображения, определенная средством определения конфигурации изображения, заданное количество раз, путем обращения к информации предыстории использования; и
средство установки использования, предназначенное для предотвращения использования средством использования данных изображения данных изображения, имеющих содержание изображения, имеющее соответствующую конфигурацию изображения, которую определили, как записанную заданное количество раз средством определения исчерпания конфигурации изображения.
10. Способ обработки изображения, содержащий следующие этапы:
определяют соответствующую конфигурацию изображения на основе содержания изображения полученных данных изображения;
выполняют управление получением конфигурации изображения для получения данных изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, определенную при определении;
используют данные изображения в момент времени, когда данные изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, были получены в результате выполнения управления получением конфигурации изображения;
содержат информацию предыстории использования, которая представляет собой информацию о конфигурациях изображения соответствующих частей данных изображения, используемых при использовании;
определяют, были ли записаны данные изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, такую же, как и соответствующая конфигурация изображения, определенная при определении, заданное количество раз путем обращения к информации предыстории использования; и предотвращают использование при использовании данных изображения содержания изображения, имеющего соответствующую конфигурацию изображения, определенную, как записанную заданное количество раз, с помощью определения.
11. Устройство записи изображения, содержащее
модуль формирования изображения, выполненный с возможностью получения данных снятого изображения в результате съемки;
модуль определения конфигурации изображения, выполненный с возможностью определения соответствующей конфигурации изображения на основе содержания изображения данных снятого изображения;
модуль управления получением конфигурации изображения, выполненный с возможностью выполнения управления получением конфигурации изображения для получения данных снятого изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, определенную модулем определения конфигурации изображения;
модуль съемки/записи, выполненный с возможностью записи данных снятого изображения на носителе записи в момент времени, когда данные снятого изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, получают путем выполнения управления получением конфигурации изображения;
модуль содержания информации предыстории съемки, выполненный с возможностью содержания информации предыстории съемки, которая представляет собой информацию о конфигурациях изображения соответствующих частей данных снятого изображения, записанных модулем съемки/записи;
модуль определения исчерпания конфигурации изображения, выполненный с возможностью определения, были ли записаны данные снятого изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, такую же, как соответствующая конфигурация изображения, определенная модулем определения конфигурации изображения, заданное количество раз путем обращения к информации предыстории съемки; и модуль установки записи, выполненный с возможностью предотвращения записи модулем съемки/записи данных снятого изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, которая была определена как записанная заданное количество раз модулем определения исчерпания конфигурации изображения.
12. Устройство обработки изображения, содержащее
модуль определения конфигурации изображения, выполненный с возможностью определения соответствующей конфигурации изображения на основе содержания изображения полученных данных изображения;
модуль управления получением конфигурации изображения, выполненный с возможностью выполнения управления получением конфигурации изображения для получения данных изображения для содержания изображения, имеющего соответствующую конфигурацию изображения, определенную модулем определения конфигурации изображения;
модуль использования данных изображения, выполненный с возможностью использования данных изображения в момент времени, когда данные изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, получают в результате выполнения управления получением конфигурации изображения;
модуль содержания информации предыстории использования, выполненный с возможностью содержания информации предыстории использования, которая представляет собой информацию о конфигурациях изображения соответствующих частей данных изображения, используемых модулем использования данных изображения;
модуль определения исчерпания конфигурации изображения, выполненный с возможностью определения, были ли записаны данные изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, такую же, как соответствующая конфигурация изображения, определенная модулем определения конфигурации изображения, заданное количество раз, путем обращения к информации предыстории использования; и
модуль установки использования, выполненный с возможностью предотвращения использования модулем использования данных изображения данных изображения с содержанием изображения, имеющим соответствующую конфигурацию изображения, которая была определена как записанная заданное количество раз модулем определения исчерпания конфигурации изображения.
| ЕР 1648166 А2, 2006.04.19 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПАРАЛЛЕЛЬНОГО ОБЪЕДИНЕНИЯ ДАННЫХ СО СДВИГОМ ВПРАВО | 2002 |
|
RU2273044C2 |
| US 2006210264 A1, 2006.09.21 | |||
| WO 2007004207 А2, 2007.01.11 | |||
| EP 1783772 А2, 2007.05.09 | |||
| Панорамная фотокамера | 1983 |
|
SU1296995A1 |

