Изобретение относится к области организации трудовых процессов инженерно-технических работников (ИТР), организации рабочих мест в промышленности, организации автоматизированных и обучающих рабочих мест и может быть использовано для создания исследовательских, производственных и учебных подразделений с автоматическим учетом параметров выполняемых трудовых процессов.
Трудовые процессы в настоящее время, в подавляющем большинстве случаев, выполняются с помощью программных продуктов, управляющих исполнительными механизмами и устройствами и подсказывающих исполнителю последовательность и содержание требуемых трудовых операций. Постоянная работа с программными продуктами вырабатывает определенный стереотип поведения и трудовой ритм использования рабочего времени, который можно назвать интеллектуализацией трудовых процессов. Но есть одна сторона деятельности, почти не охваченная компьютеризацией, - это само рабочее место работника.
Известны рабочие места ИТР и рабочих, состоящие из обычных письменных и специальных столов различной конфигурации и доукомплектованные надстольными полками, книжными и металлическими шкафами [1, 2]. При этом каждый работник имеет свою собственную «систему» размещения на таком рабочем месте инструментов, приспособлений, материалов, комплектующих, а также способ учета информационных источников и результатов выполненных работ, как правило, труднообъяснимый для других сотрудников и руководства фирмы. Т.е. такое рабочее место эффективно используется только со своим «хозяином». Такие рабочие места способствуют формированию неучтенных запасов комплектации, материалов, ненужному дублированию специального инструмента и приспособлений. Затрудняют использование результатов выполненных работ при вынужденном отсутствии работника. Оснащение таких рабочих мест компьютером скорее снижает, а не повышает, производительность труда работника, так как несанкционированное использование компьютера практически трудно проконтролировать.
Известно также рабочее место [3], содержащее первую столешницу, расположенную на первой несущей конструкции, имеющую сопряжение, с одной стороны, со второй столешницей, расположенной на второй несущей конструкции, а с другой стороны, сопряжение с третьей столешницей, расположенной на третьей несущей конструкции. Его недостатки заключаются в узких функциональных возможностях и низкой эффективности выполнения трудовых операций, связанных с недостаточной автоматизацией вспомогательных процедур.
Технический результат изобретения заключается в расширении функциональных возможностей рабочего места и в повышении эффективности выполнения трудовых операций на основе автоматизации некоторых вспомогательных процедур и улучшения его эргономических характеристик.
Предлагаемое интеллектуальное рабочее место (ИРМ) предоставляет возможность освобождения инженера от некоторых вспомогательных, не свойственных инженерному труду функций, сводит к минимуму указанные недостатки организации труда работников, позволяет начать процесс унификации и стандартизации трудовых процессов на фирме, дает возможность организации пошагового контроля особо ответственных операций. Использование ИРМ для производственных процессов улучшает организацию труда работников, повышает качество выполняемых работ.
Указанный технический результат достигается тем, что в интеллектуальном рабочем месте, содержащем первую столешницу, расположенную на первой несущей конструкции, имеющую сопряжение, в том числе и под углом, с одной стороны, со второй столешницей, расположенной на второй несущей конструкции, а с другой стороны, сопряжение с третьей столешницей, расположенной на третьей несущей конструкции, внутри первой несущей конструкции, в ее верхней части, расположен ящик с ячейками, для фиксации наличия ячейки оснащенный датчиками системы управления, внутри второй несущей конструкции размещен мини-склад для комплектующих изделий, оснащенный датчиками системы управления, внутри третьей несущей конструкции размещены тумба с ящиками для комплектации и тумба для технической литературы, для фиксации наличия ячейки оснащенные датчиками системы управления, причем все датчики системы управления электрически сопряжены с блоком управления, а блок управления электрически сопряжен с ЭВМ.
Существует вариант, в котором в ИРМ введены регулируемые подлокотники, расположенные на первой несущей конструкции перед первой столешницей ИРМ.
Существует также вариант, в котором в ИРМ введен выдвижной блок с полками, оснащенный датчиками системы управления, электрически сопряженными с блоком управления, расположенный на первой несущей конструкции.
Возможен вариант, в котором в ИРМ введена полка, установленная на стойках по средней линии O-O самой полки, размещенная своей внутренней частью над первой столешницей, второй столешницей и третьей столешницей и образующая под своей внешней частью первую нишу, условно ограниченную задней частью первой столешницы, вторую нишу, условно ограниченную задней частью второй столешницы, третью нишу, условно ограниченную задней частью третьей столешницы.
Возможен также вариант, в котором в ИРМ введено фиксирующее устройство для чертежей, размещенное на стойках, например, над первой столешницей.
В отдельных случаях целесообразен вариант ИРМ укомплектованный закрытым боксом с транспортером элеваторного типа со съемными ячейками, оснащенный датчиками системы управления, электрически сопряженными с блоком управления, при этом закрытый бокс с транспортером элеваторного типа размещен в третьей нише.
Целесообразны также варианты, в которых в ИРМ введена перемещаемая подставка для дисплея ЭВМ, размещенная под полкой, а также введен каркас, размещенный во второй нише.
На фиг.1 изображен общий вид ИРМ.
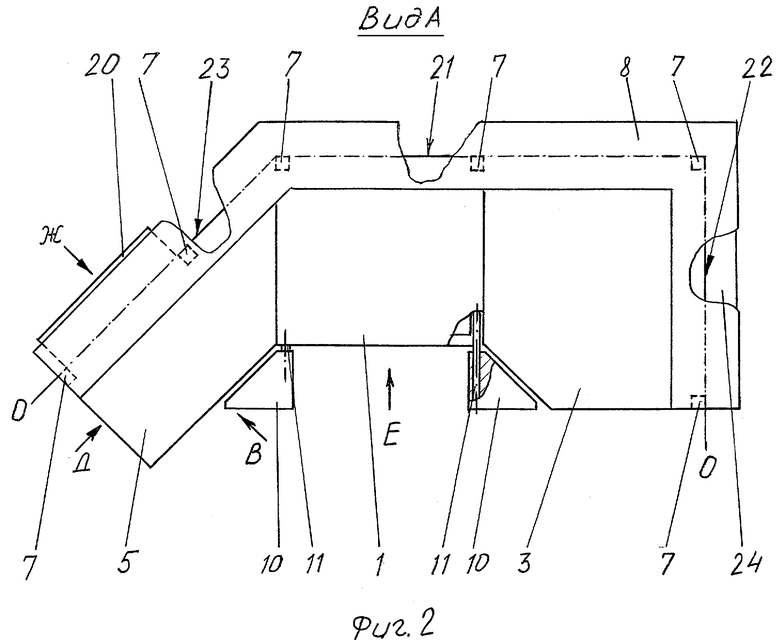
На фиг.2 - вид сверху по фиг.1.
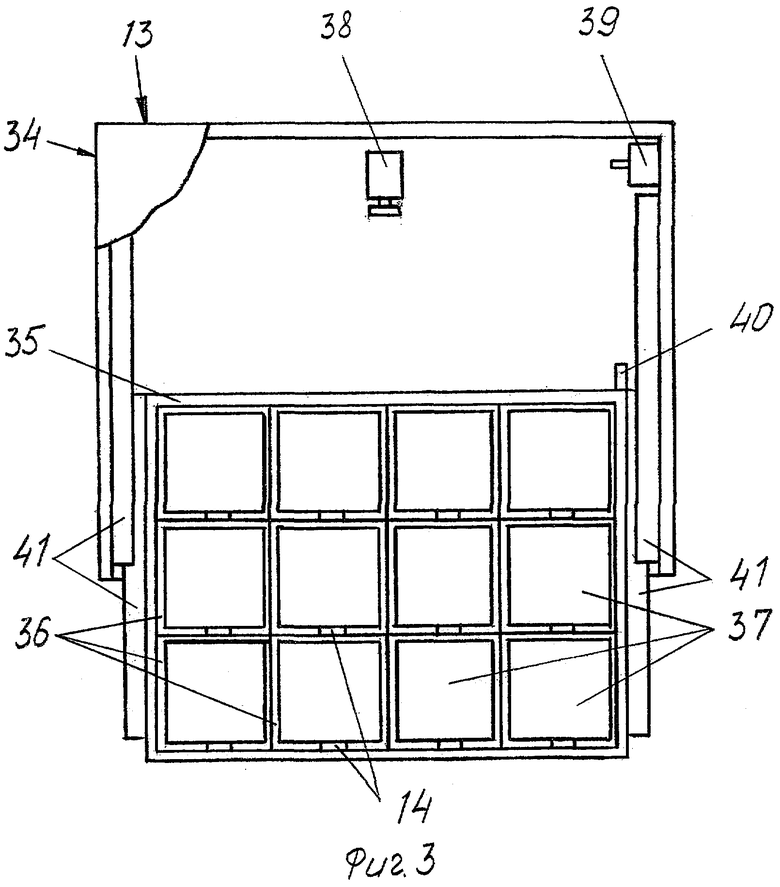
На фиг.3 - устройство ящика с ячейками.
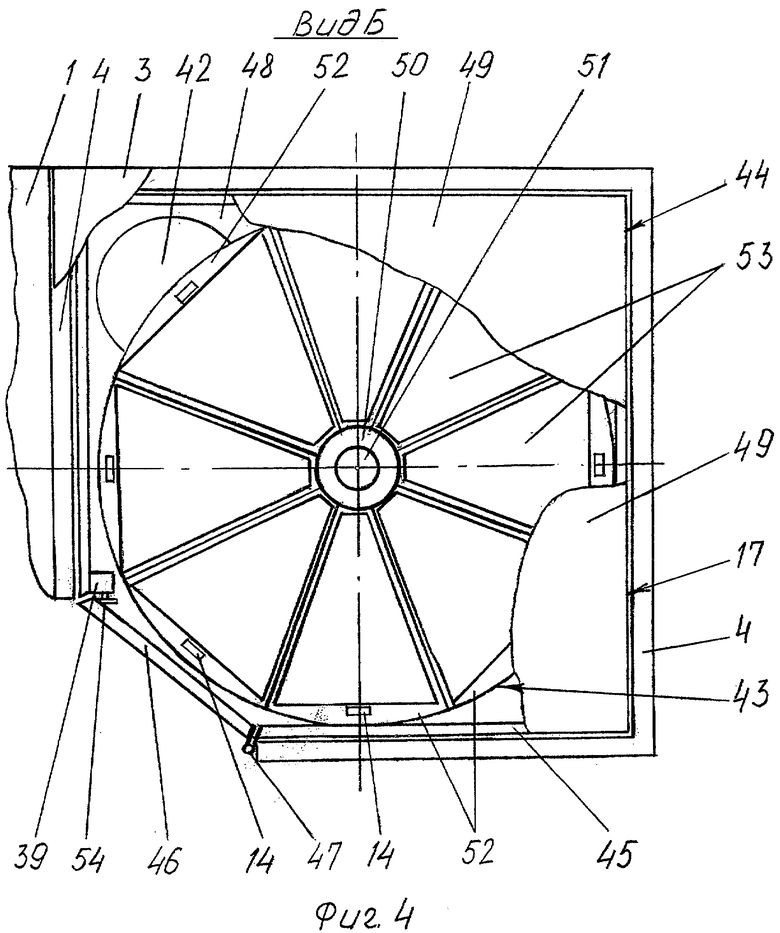
На фиг.4 - устройство мини-склада для комплектующих изделий.
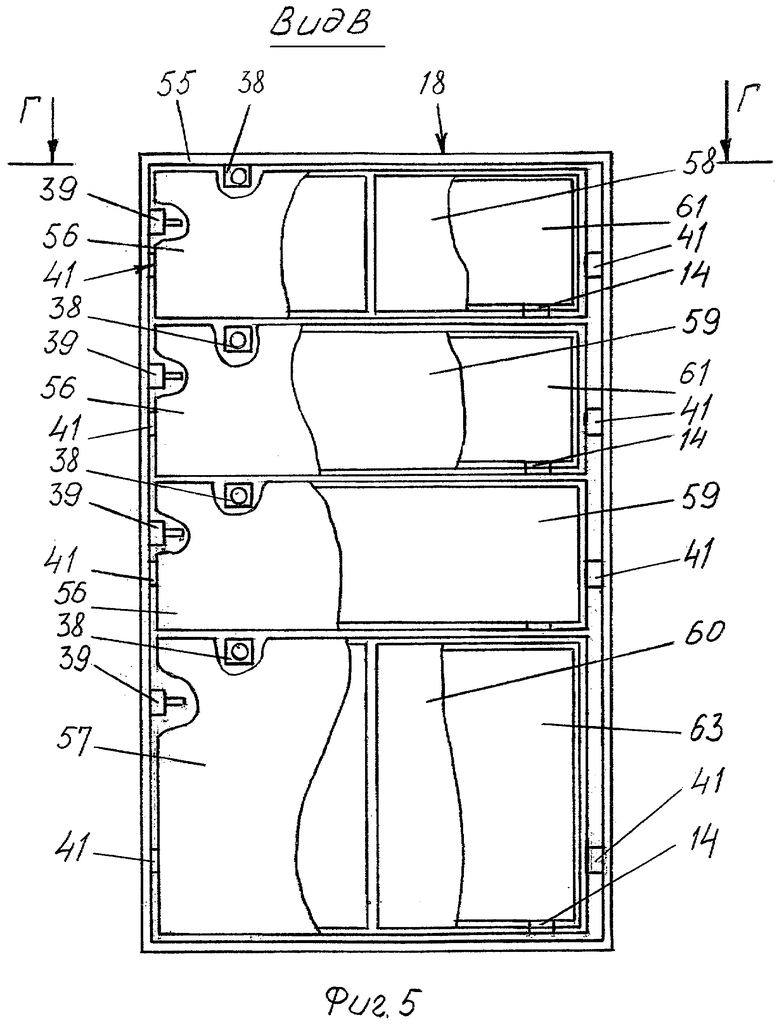
На фиг.5 - устройство тумбы с ящиками для комплектующих изделий.
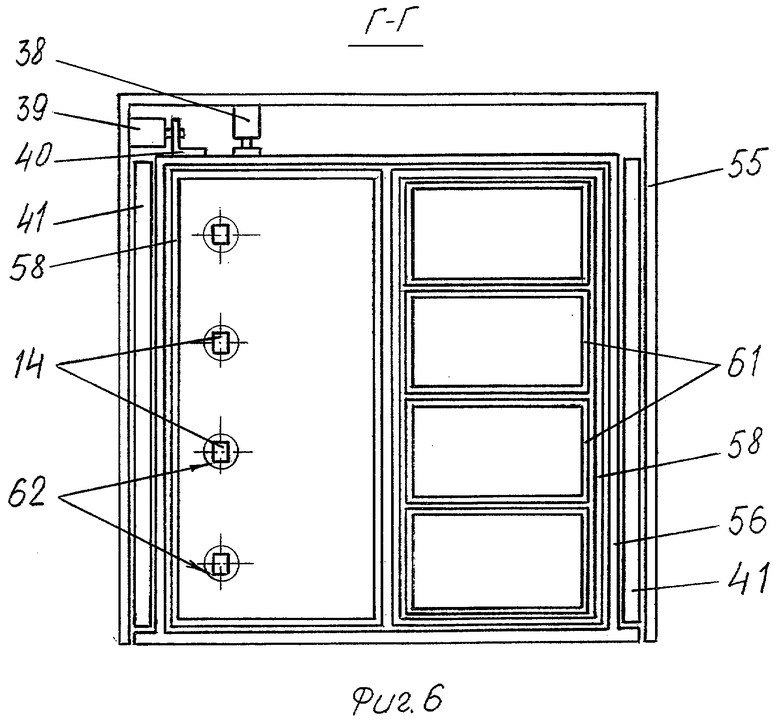
На фиг.6 - устройство ящика для комплектующих изделий по фиг.5.
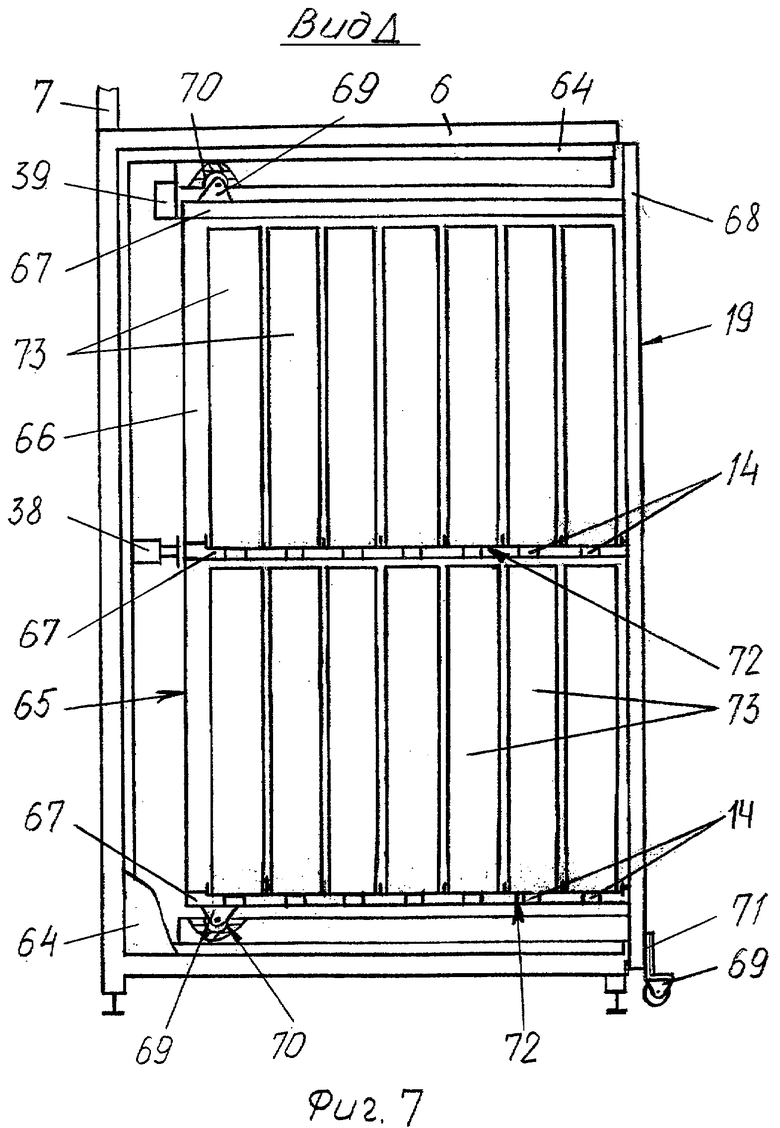
На фиг.7 - устройство тумбы для технической литературы.
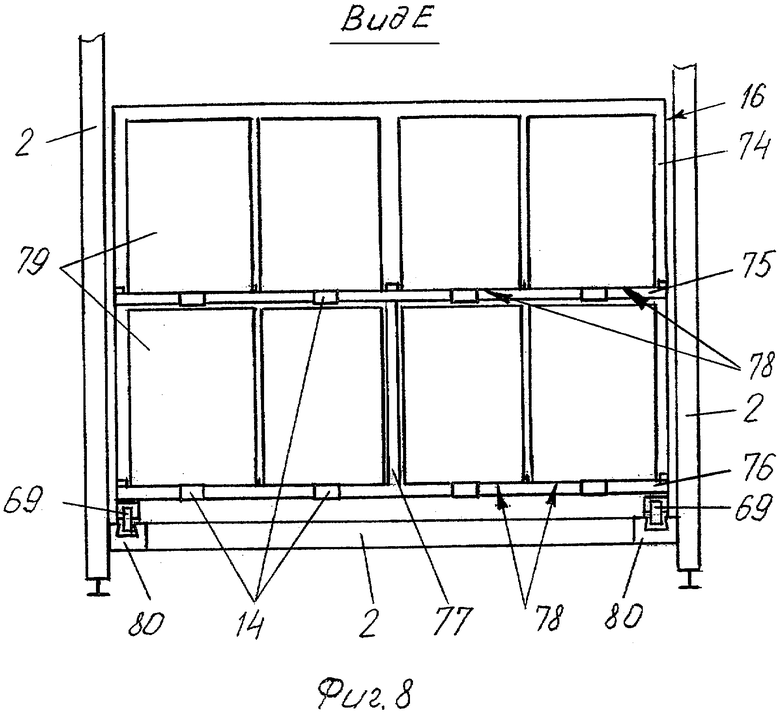
На фиг.8 - устройство выдвижного блока с полками.
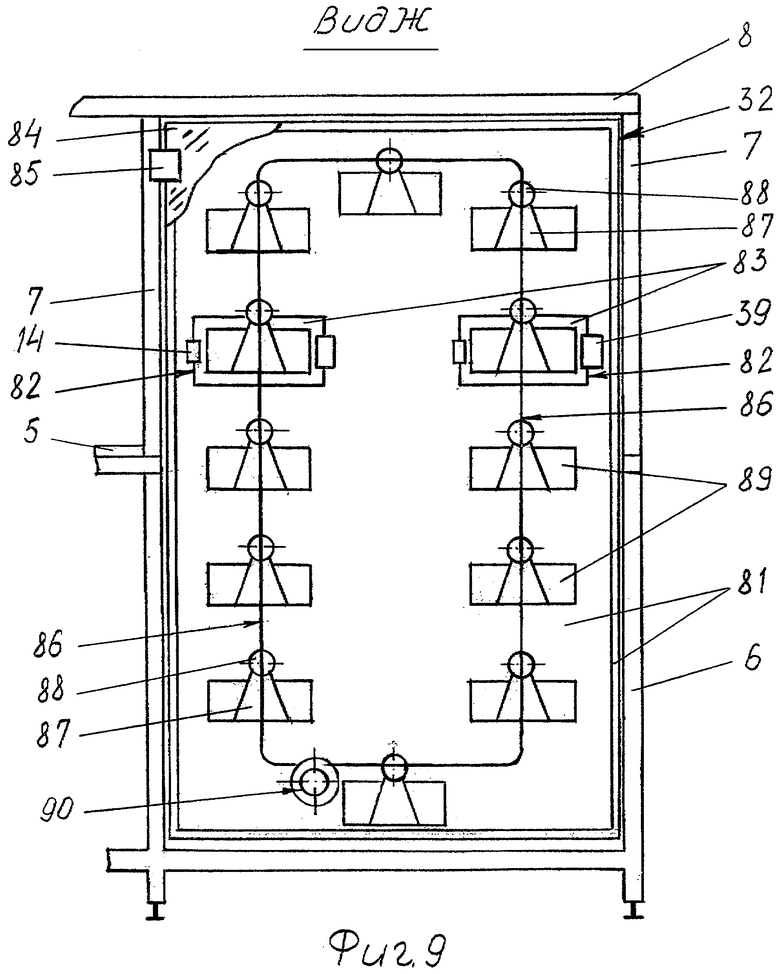
На фиг.9 - устройство закрытого бокса с транспортером элеваторного типа.
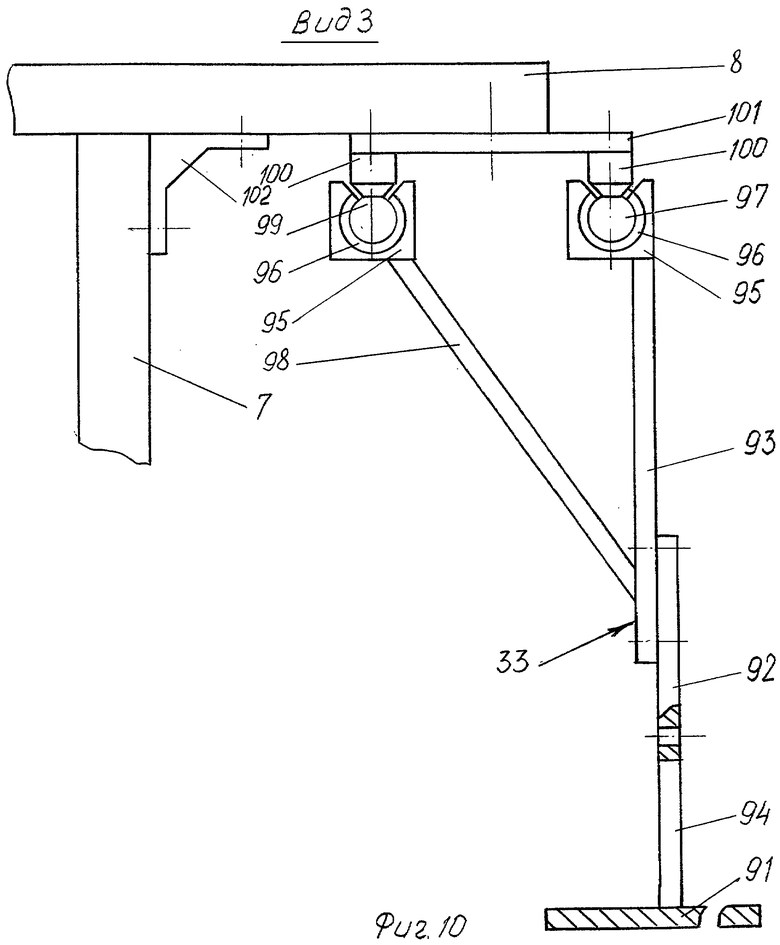
На фиг.10 - устройство перемещаемой подставки для дисплея ЭВМ.
ИРМ (фиг.1 и 2) содержит первую столешницу 1, размещенную на первой несущей конструкции 2. Первая столешница 1 имеет сопряжение, в том числе и под углом, со второй столешницей 3, размещенной на второй несущей конструкции 4 и с третьей столешницей 5, размещенной на третьей несущей конструкции 6. Над всеми столешницами на стойках 7 расположена полка 8, установленная по средней линии О-О полки 8. Крепление столешниц, а также прочих устройств, на несущих конструкциях осуществляют известным способом, например с помощью винтов (не показаны). Несущие конструкции установлены на регулируемых опорах 9.
Регулируемые подлокотники 10 выполнены в виде двух параллельных столешнице 1 полочек, каждая из которых жестко закреплена на опорном стержне 11, имеющем прямоугольное сечение. Опорные стержни 11 установлены в несущей конструкции 2 перпендикулярно передней кромке столешницы 1 без возможности проворачивания, но с возможностью поступательного перемещения в несущей конструкции 2, чем обеспечивается регулировка положения подлокотников.
Выдвижная полка 12 для клавиатуры ЭВМ расположена под первой столешницей 1 в верхней части несущей конструкции 2. Выдвижная полка 12 перемещается по стандартным направляющим с опорными роликами, используемым в тумбах письменных и рабочих столов, которые размещены на несущей конструкции 2.
Также внутри первой несущей конструкции 2, в ее верхней части, под выдвижной полкой 12, расположен ящик 13 с ячейками (см. ниже). Ящик 13 перемещается по стандартным направляющим с опорными роликами, используемым в тумбах письменных и рабочих столов, которые размещены на несущей конструкции 2. Для фиксации наличия ячейки в ящике установлены датчики системы управления 14 (например, герконовые), электрически сопряженные с блоком управления 15. Блок управления 15 управляется от ЭВМ и размещен снаружи второй несущей конструкции 4 на ее боковой поверхности.
В дальнейшем изложении принимается, что все датчики 14 по принципу действия - герконовые [4] и электрически сопрягаются с блоком управления 15. Эти соединения условно не показаны. Аналогичные блоки управления подробно описаны в [5-7].
Выдвижной блок 16 с полками (см. ниже) размещен внутри несущей конструкции 2, в ее нижней части. Для фиксации наличия ячеек на полках установлены датчики системы управления 14.
Внутри второй несущей конструкции 4 расположен мини-склад 17 для комплектующих изделий (см. ниже). Для фиксации наличия ячеек в мини-складе также установлены датчики системы управления 14.
Внутри третьей несущей конструкции 6 расположены тумба с ящиками для комплектации 18 и тумба для технической литературы 19 (см. ниже). Для фиксации наличия ячеек в тумбах установлены датчики системы управления 14.
Закрытый бокс с транспортером элеваторного типа 20 (см. ниже) для инструмента и приспособлений установлен в третьей нише 23 по всей ее высоте на задней стороне третьей несущей конструкции 6.
Полка 8, установленная на стойках 7 по средней линии O-O полки 8, размещенная своей внутренней частью над первой столешницей 1, второй столешницей 3 и третьей столешницей 5, образует под своей внешней частью первую нишу 21, условно ограниченную задней частью первой столешницы 1, вторую нишу 22, условно ограниченную задней частью второй столешницы 3, третью нишу 23, условно ограниченную задней частью третьей столешницы 5. «П»-образная форма полки 8 обеспечивает ее устойчивость и прочность. Стойки 7 могут быть сопряжены с полкой 8 и несущими конструкциями любым известным способом, например посредством болтов (не показаны). В случае применения свинчиваемых каркасов используется специальный крепеж, предусмотренный изготовителями свинчиваемых каркасов, например, фирмы KANYA [8].
Каркас 24 для размещение дополнительного оборудования ИРМ, в данном варианте ИРМ, установлен в верхней части ниши 22. Такой же каркас может быть установлен в нишах 21 и 23.
Закрепление устройств 15, 20 и 24 на несущих конструкциях и стойках осуществлено посредством кронштейнов, упоров, полок, винтов и т.п. С целью упрощения чертежей эти крепления условно не показаны.
Фиксирующее устройство 25 для чертежей размещено на стойках 7, например, над первой столешницей 1. Оно содержит четыре одинаковых фрагмента, каждый из которых состоит из малого рычага 26, шарнирно установленного на малой бобышке 27, и большого рычага 28, шарнирно установленного на большой бобышке 29. На магнитный держатель 30, являющийся одновременно осью вращения для шарнирного соединения большого и малого рычагов, установлена прижимная пластина 31, выполненная из магнитного материала. Бобышки 25 и 27 установлены и перемещаются на стойке 7 с помощью струбцин 32.
Перемещаемая подставка 33 для дисплея ЭВМ (см. ниже) размещена под полкой 8, над столешницей 3 или столешницей 1.
Ящик с ячейками 13 (фиг.3) сконструирован в виде закрытого корпуса 34, в котором расположен выдвижной ящик 35, разбитый на отсеки 36, содержащие съемные ячейки 37, а каждый отсек оснащен датчиком 14 наличия ячейки в соответствующем отсеке. Кроме того, корпус 34 оборудован электромагнитным выталкивателем 38 ящика и электромагнитным замком 39. В качестве электромагнитного выталкивателя использована обычная, с соответствующим рабочим током, электрическая катушка с подвижным сердечником из магнитного материала, сердечник снабжен плоским наконечником, соприкасающимся с задней стенкой выдвижного ящика 35 в его закрытом положении. В качестве электромагнитного замка также использована обычная, с соответствующим рабочим током, электрическая катушка с подвижным сердечником из магнитного материала, сердечник имеет форму стержня. В закрытом положении выдвижного ящика 35 стержень входит в петлю 40 и удерживается в этом положении возвратной пружиной сердечника. Выдвижной ящик 35 установлен в корпус 34 на стандартных направляющих 41 с опорными роликами, используемыми в тумбах письменных и рабочих столов.
Мини-склад 17 (фиг.4) сконструирован в виде вращаемой приводом 42 многоуровневой этажерки с тремя одинаковыми круглыми полками-уровнями 43, расположенной в корпусе 44. В приводе 42 может быть использован шаговый двигатель с силовым редуктором момента вращения типа SM-200-0,22-1 [9]. Корпус 44 представляет собой короб 45 с дверью 46, шарнирно закрепленной на стенке короба с помощью петель 47. Короб имеет нижнюю крышку 48 и верхнюю крышку 49 с установленными с внутренней стороны, по центру крышек, подшипниками 50. Полки 43 закреплены на вращающейся оси 51, установленной в подшипниках 50. Полки разбиты на сектора 52, в каждом из которых имеется съемная ячейка 53, выполненная в виде съемного ящика, и каждый сектор оснащен датчиком 14 для фиксации наличия ячейки 53 в секторе 52. В каждом секторе имеется понижение по форме дна ячейки для точной установки ячейки на место, а при выборе высоты ячейки учитывается высота понижения. Кроме того, дверь 46 мини-склада оборудована электромагнитным замком 39, запирающим дверь с помощью петли 54 (аналогично ящику с ячейками 9, фиг.3).
Ящики для комплектации 18 (фиг.5 и 6) сконструированы в виде тумбы 55 с выдвижными ящиками 56, 57. Ящики 56, 57 установлены в тумбу 55 на стандартных направляющих 41 с опорными роликами, используемыми в тумбах письменных и рабочих столов. Кроме того, каждый из ящиков 56, 57 оборудован электромагнитным замком 39 и электромагнитным выталкивателем 38, установленными аналогично ящику с ячейками 9 (см. также на фиг.3). В ящик 56 могут быть вложены две емкости 58 или одна емкость 59, выполненные в виде съемных ящиков. Емкости 58 содержат по четыре съемные ячейки 61, а емкость 59 содержит восемь ячеек 61, которые также выполнены в виде съемных ящиков. В ящик 57 вложены две емкости 60, выполненные в виде съемных ящиков. Емкости 60 содержат по две съемные ячейки 63, которые также выполнены в виде съемных ящиков. Каждый из ящиков 56, 57 оснащен датчиками системы управления 14 для контроля наличия каждой ячейки в емкостях. Для этого емкости 58-60 имеют отверстия 62, через которые датчики контактируют с ячейками 61, 63.
Тумба для технической литературы 19 (фиг.7), в том числе и для электронных носителей информации, сконструирована в виде закрытого корпуса 64, выполненного в виде короба без передней стенки, в котором размещена выдвижная тумба 65. В тумбе 65 в качестве несущей конструкции используется стенка 66, на которой горизонтально установлены нижняя, средняя и верхняя полки 67. Полки 67 и стенка 66 соединены с передней стенкой 68, образуя тем самым жесткую конструкцию тумбы 65. На верхней и нижней полках 67 установлено по одному колесу 69. Эта пара колес перемещается по пазам в направляющих 70, установленных на внутренних сторонах верхней и нижней крышек корпуса 64 перпендикулярно передней стенке 68. Еще одна пара колес 69 на кронштейнах 71, установленная в нижней части передней стенки 68, при своем движении использует поверхность пола производственного помещения. Нижняя и средняя полки 67 имеют фрезерованные понижения 72, в которых устанавливаются съемные ячейки 73, выполненные в виде вертикальных узких ящиков без верхней крышки и имеющие размер, позволяющий размещать в них документы формата А4. Каждое понижение 72 на нижней и средней полках 67 имеет датчик системы управления 14, фиксирующий наличие съемной ячейки 73 в понижении. Кроме того, корпус 64 оборудован электромагнитным замком 39 и электромагнитным выталкивателем 38, установленными аналогично ящику с ячейками 9 (см. также на фиг.3)
Выдвижной блок 16 с полками (фиг.8) выполнен в виде жесткой открытой конструкции с задней несущей стенкой 74. На стенке 74 горизонтально зафиксированы полка 75 и основание 76, между которыми установлена опора 77. На полке 75 и основании 76 имеются фрезерованные понижения 78, в которых размещены съемные ячейки 79. Снизу на основании 76 имеются четыре колеса 69, которые могут перемещаться по пазам в направляющих 80, установленных в нижней части первой несущей конструкции 2. Полка 75 и основание 76 оснащены датчиками 14 для фиксации наличия каждой отдельной ячейки 79 на своем месте.
Закрытый бокс с транспортером элеваторного типа 20 для инструмента и приспособлений (фиг.9) сконструирован в корпусе 81. В передней стенке корпуса 81, со стороны оператора, предусмотрены два окна 82 загрузки/выдачи с дверями 83, оснащенными электромагнитными замками 39 и датчиками 14 для фиксации наличия ячейки в окне загрузки/выдачи 82 (см. также фиг.1). Электромагнитные замки установлены аналогично ящику с ячейками 9 (см. также на фиг.3). На противоположной от оператора стороне корпуса 81 расположена прозрачная дверь 84 с механическим замком 85. Основой конструкции бокса является цепной транспортер 86 элеваторного типа с равномерно навешанными на него подвижными держателями 87 для ячеек. Подвес 88 держателя 87 выполнен выше его центра тяжести, что обеспечивает горизонтальное положение держателя 87 при любом повороте цепи транспортера 86. На держатели 87 с помощью, например, магнитных фиксаторов устанавливаются съемные ячейки 89. Все позиции с держателями имеют нумерацию в порядке расположения, начиная с цифры 1. Транспортер приводится в движение приводом 90. В приводе может быть использован шаговый двигатель с силовым редуктором момента вращения типа SM-200-0,34-1 [9]. Подробно аналогичный транспортер описан в [10].
Перемещаемая подставка 33 для дисплея ЭВМ (фиг.10) конструктивно выполнена в виде подставки 91, жестко соединенной со стенкой 92. Стенка 92 закреплена на двух кронштейнах 93 (см. также фиг.1), имеет возможность регулировки по высоте относительно кронштейнов 93, а в нижней ее части предусмотрен вырез 94, по форме и высоте соответствующий габаритам опоры корпуса дисплея ЭВМ. Регулировка по высоте положения стенки 92 осуществляется за счет перестановки стенки 92 на кронштейнах 93 с использованием дополнительных крепежных отверстий в стенке 92. Верхняя часть кронштейна 93 через бобышку 95 с вкладышем 96 имеет возможность перемещения по направляющей 97 по всей ее длине. Каждый из двух упоров 98 закреплен нижним концом на соответствующем кронштейне 93. Верхняя часть упоров 98 закреплена на направляющей 99 аналогично креплению верхней части кронштейнов 93. Направляющие 97 и 99 через втулки 100 установлены на четырех планках 101. Планки 101 равномерно установлены снизу полки 8. Для обеспечения большей прочности конструкции ИРМ в месте размещения устройства 33 соединение стоек 7 с полкой 8 усиливается установкой специальных уголков 102.
Следует заметить, что столешницы, полки и съемные ячейки в устройствах ИРМ могут иметь различные размеры и различную конфигурацию, например прямоугольную.
Регулируемые опоры 9 несущих конструкций выполняют функцию компенсации неровностей пола при установке ИРМ.
Помимо описанных элементов в ИРМ могут быть использованы системы технического телевидения и переговорные устройства. (На чертежах не показаны).
Кроме того, одна из столешниц может иметь прозрачную матовую поверхность со встроенным внутри нее источником подсветки, например с использованием светодиодов. (На чертежах не показано).
Несущие конструкции, стойки, полка и каркасы устройств ИРМ могут быть изготовлены из набора профилей и специального крепежа для свинчиваемых каркасов, например фирмы KANYA [8].
Организация интеллектуального рабочего места осуществляется в следующей последовательности, рассмотренной для полной конфигурации ИРМ. В соответствии с выбранной конфигурацией (комплект устройств и блоков) ИРМ определяется его размещение в помещении. После чего осуществляются сборка несущих конструкций 2, 4, 6 и установка на них полки 8 на стойках 7.
В первой несущей конструкции 2 производится монтаж ящика 13 с ячейками, выдвижной полки 12 для клавиатуры ЭВМ, выдвижного блока 16 с полками, а затем - столешницы 1. На регулируемых горизонтальных опорных осях 11 устанавливаются подлокотники 10. Затем над столешницей 1 на стойках 7 попарно вставляются и закрепляются струбцинами 32 бобышки таким образом, что две бобышки 29 оказываются на стойке 7 внутри, а по одной бобышке 27 сверху и снизу от них по высоте стойки. (Возможен и обратный порядок установки бобышек.) На бобышках 27 шарнирно устанавливаются рычаги 26, а на бобышках 29 - рычаги 28. Свободные концы рычагов 26 и 28 шарнирно соединяются магнитными держателями 30 с прижимными пластинами 31.
Во второй несущей конструкции 4 производится установка мини-склада 17 в корпусе 44, для чего одна из нижних перекладин несущей конструкции 4 снимается для перемещения корпуса 44 внутрь несущей конструкции 4, а затем устанавливается на место. Сверху на несущей конструкции 4 помещается вторая столешница 3. При монтаже устройства 33 для установки дисплея ЭВМ на нижней стороне полки 8 на планках 101 над столешницами 1 и 3 монтируются направляющие 97 и 99. Затем на кронштейнах 93 выставляется стенка 92 с подставкой 91.
В третьей несущей конструкции 6 производится установка тумбы 55 ящиков для комплектации 18 и корпуса 64 тумбы для технической литературы 19. Сверху на несущей конструкции 6 помещается третья столешница 5. В левой части ниши 23 устанавливается корпус 81 закрытого бокса с транспортером элеваторного типа 20.
В нишах 21, 22 и правой части ниши 23 устанавливаются каркасы 24 с дополнительными устройствами и оборудованием, если это предусмотрено конфигурацией ИРМ.
После установки всех предусмотренных данной конфигурацией устройств и блоков выполняются их электрические соединения с блоком управления 15, а блока управления - с ЭВМ. На этом монтаж ИРМ завершается.
Функционирование (использование) интеллектуального рабочего места происходит следующим образом.
Для начала работы с интеллектуальным рабочим местом необходимо установить на компьютер системы управления ИРМ программное обеспечение, аналогичное [7].
Исходный пакет программного обеспечения может предусматривать использование ИРМ в различных режимах, например:
1. Обучение персонала выполнению производственных операций с автоматическим дистанционным контролем администратором.
2. Выполнение особо ответственных производственных операций с пошаговым контролем выполняемых действий.
3. Практическое обучение в учебных заведениях с автоматическим дистанционным контролем преподавателем.
4. Выполнение исследовательских работ, в том числе с большим числом вариантов.
5. Выполнение исследовательских работ, в том числе с большим числом исследуемых компонентов.
6. Служебные режимы подготовки и диагностики ИРМ.
Работа пользователя в одном из режимов начинается с адаптации предложенного типового режима к своим потребностям. При этом исполнительные устройства ИРМ становятся частью реализуемой программы, пользователю предлагаются готовые протоколы выполняемых действий, представляются отчетные формы, а в задачу работника, решающего производственную, учебную или исследовательскую задачу с помощью ИРМ, входит строгое следование получаемым от программы указаниям.
Для выполнения с использованием ИРМ какой-либо учебной, производственной или исследовательской задачи проводится подготовка (настройка) ИРМ. В процессе подготовки осуществляется размещение в устройствах ИРМ комплектации, инструмента, приспособлений и т.п., а информация о них вводится в компьютер.
В связи с относительной высокой стоимостью комплекта ИРМ его использование, желательно, осуществлять в непрерывном режиме, с минимальным подготовительным временем для каждой решаемой на нем задачи. Для этого в составе ИРМ предусматривается возможность комплексной замены рабочих ячеек 37, 53, 61, 62, 63, 73, 79, 89, подготавливаемых на обычном рабочем месте с занесением необходимой информации в компьютер.
Работа с отдельными устройствами ИРМ рассмотрена ниже.
Ящик с ячейками 13 (фиг.3), расположенный в непосредственной близости к рабочей зоне оператора ИРМ, может иметь выдвижной ящик 35 с достаточно большим числом мелких ячеек 37. Управляющая программа выдает с ЭВМ по запросу пользователя или по реализуемой программе команду на обеспечение доступа к необходимой ячейке 37. Открывается электромагнитный замок 39 выдвижного ящика 35. Выталкиватель 38 подает вперед выдвижной ящик 35, обозначая его открытое положение. На дисплее ЭВМ появляется информация о содержании ячейки 37 и необходимости выполнения пользователем заданных программой действий. При закрывании ящика 35 ЭВМ проводит диалог для выяснения технических параметров выполненного действия и принимает решение о продолжении работы пользователем.
Мини-склад 17 (фиг.4) в силу хорошей защищенности корпусом 44 от несанкционированного доступа предназначен в основном для хранения дорогостоящей комплектации и полученных в результате проведенных на ИРМ работ образцов. Управляющая программа выдает с ЭВМ по запросу пользователя или по реализуемой программе команду на обеспечение доступа к необходимой ячейке 53. Привод 42 выбора сектора выполняет поворот оси 51 до нужного сектора 52. Открывается электромагнитный замок 39 окна выдачи 46. На дисплее ЭВМ появляется информация о содержании ячейки и необходимости выполнения пользователем заданных программой действий. После выполнения пользователем задания, ЭВМ проводит диалог для выяснения технических параметров выполненного действия и принимает решение о продолжении работы пользователем.
Ящики для комплектации 18 (фиг.5 и 6), расположенные в тумбе 55, из-за наличия в ящиках 56, 57 дополнительных емкостей 58-60 имеют больше возможностей для комбинирования загрузки необходимой комплектации сразу отдельными емкостями, поэтому устройство используется при оперативной смене процессов. Управляющая программа выдает с ЭВМ по запросу пользователя или по реализуемой программе команду на обеспечение доступа к необходимой емкости 58, 59 или 60. Открывается электромагнитный замок 39 соответствующего ящика. Выталкиватель 38 соответствующего ящика 56 или 57 подает ящик из тумбы 55, обозначая его открытое положение. На дисплее ЭВМ появляется информация о содержании ячейки и необходимости выполнения пользователем заданных программой действий. После выполнения пользователем задания ЭВМ проводит диалог для выяснения технических параметров выполненного действия и принимает решение о продолжении работы пользователем.
Тумба для технической литературы 19 (фиг.7) не участвует непосредственно в производственных процессах, если только заполнение материальных носителей информации не является требованием выполняемого процесса. Управляющая программа выдает с ЭВМ по запросу пользователя или по реализуемой программе команду на обеспечение доступа к необходимой ячейке 73. Открывается электромагнитный замок 39 выдвижной тумбы 65. Выталкиватель 38 подает вперед выдвижную тумбу 65, обозначая ее открытое положение. На дисплее ЭВМ появляется информация о содержании ячейки 73 и необходимости выполнения пользователем заданных программой действий. При закрывании тумбы 65 ЭВМ проводит диалог для выяснения технических параметров выполненного действия и, в случае необходимости, принимает решение о продолжении работы пользователем.
Выдвижной блок 16 (фиг.8) предназначен для размещения относительно больших комплектующих элементов или приспособлений. Управляющая программа выдает с ЭВМ по запросу пользователя или по реализуемой программе команду на обеспечение доступа к необходимой ячейке 79. На дисплее ЭВМ появляется информация о содержании ячейки 79 и необходимости выполнения пользователем заданных программой действий. При установке ячейки 79 на место ЭВМ проводит диалог для выяснения технических параметров выполненного действия и, в случае необходимости, принимает решение о продолжении работы пользователем.
Закрытый бокс с транспортером элеваторного типа 20 (фиг.9), оснащенный съемными ячейками, в силу хорошей защищенности от несанкционированного доступа предназначен в основном для хранения дорогостоящего инструмента и приспособлений. Через прозрачную заднюю дверь 84 удобно контролировать визуально заполнение ячеек 89. Открыв механический замок 85, можно произвести доукомплектование ячеек 89 с одновременным пополнением базы данных компьютера ИРМ. Управляющая программа выдает с ЭВМ по запросу пользователя или по реализуемой программе команду на обеспечение доступа к необходимой ячейке 89. Привод 90 выбора ячейки 89 выполняет перемещение транспортера 86 по кратчайшему расстоянию до окна загрузки/выгрузки 82. Включается датчик 14 наличия требуемой ячейки 89 в окне 82, открывается электромагнитный замок 39 двери 83 окна загрузки/выгрузки 82 для доступа к ячейке. На дисплее ЭВМ появляется информация о содержании ячейки и необходимости выполнения пользователем заданных программой действий. После выполнения пользователем задания ЭВМ проводит диалог для выяснения технических параметров выполненного действия и принимает решение о продолжении работы пользователем.
При использовании фиксирующего устройства 25 (фиг.1) для чертежей необходимо попеременно перемещать по стойке 7 большие 29 и малые 27 бобышки. За счет разной длины рычагов 26 и 28, связанных осью вращения на магнитном держателе 30, магнитный держатель будет описывать дугу, перемещаясь до необходимого расстояния. Приложив к магнитному держателю лист чертежа или схемы надо зафиксировать его прижимной пластиной 31.
Освободить полезную площадь рабочих столешниц 1 или 3 позволяет перемещаемая подставка 33 (фиг.10) для дисплея ЭВМ. При использовании подставки 33 необходимо отрегулировать положение стенки 92 на кронштейнах 93 до размера, соответствующего высоте корпуса используемого дисплея ЭВМ. Затем сместить подставку 33 в крайнее левое положение на направляющих 97 и 99, установить дисплей экраном к оператору на подставку 91, разместив опору корпуса дисплея в вырезе 94 стенки 92, и выполнить необходимые электрические соединения. При этом следует одевать электрические кабели на направляющую 99 так, чтобы они образовали спиральную навивку свободными кольцами вокруг направляющей 99. После этого подставка может обеспечивать плоскопараллельное перемещение дисплея в пределах длины направляющих 97 и 99.
Для использования регулируемых подлокотников 10 (фиг.2) необходимо отрегулировать их положение у столешницы 1, соответствующее запросам конкретного пользователя. Регулировка положения подлокотника осуществляется в горизонтальной плоскости перемещением опорной оси 11 перпендикулярно передней кромке первой столешницы 1.
Технические эффекты изобретения
1. Введение ящика со съемными ячейками для размещения комплектации небольших размеров, оснащенного датчиками системы управления, расположенного на первой несущей конструкции первой столешницы, улучшает потребительские свойства ИРМ и обеспечивает возможность его автоматизации.
2. Размещение во второй несущей конструкции мини-склада для комплектующих изделий, оснащенного датчиками системы управления, повышает эффективность использования площади рабочего помещения и эффективность использования рабочего места.
3. Размещение в третьей несущей конструкции тумбы с ящиками для комплектации и тумбы для технической литературы, оснащенных датчиками системы управления, повышает эффективность использования площади рабочего помещения и эффективность использования рабочего места.
4. Сопряжение блока управления с ЭВМ позволяет автоматизировать использование ИРМ, что расширяет его функциональные возможности и поднимает статус понятия рабочего места на более высокий интеллектуальный уровень.
5. Введение регулируемых подлокотников, расположенных на несущей конструкции, улучшает эргономические характеристики ИРМ и обеспечивает эффективное использование площади столешницы.
6. Введение выдвижного блока с полками, оснащенного датчиками системы управления, расположенного в первой несущей конструкции первой столешницы, также улучшает потребительские свойства ИРМ и обеспечивает возможность его автоматизации.
7. Введение полки, установленной на стойках по средней линии этой полки и размещенной своей внутренней частью над столешницами, образующей под своей внешней частью ниши, условно ограниченные задними частями столешниц, обеспечивает дополнительную жесткость как самой полке, так и всей конструкции ИРМ, расширяет функциональные возможности ИРМ, а также улучшает его эргономические характеристики и обеспечивает эффективное использование площади столешницы.
8. Введение фиксирующего устройства для чертежей, размещенного на стойках полки, также улучшает эргономические характеристики ИРМ и обеспечивает эффективное использование площади столешницы.
9. Введение закрытого бокса с транспортером элеваторного типа со съемными ячейками, оснащенного датчиками системы управления, размещенного в нише на третьей несущей конструкции, обеспечивает экономию площади производственного помещения, а также улучшает потребительские свойства ИРМ и обеспечивает возможность его автоматизации.
10. Введение перемещаемой подставки для дисплея ЭВМ, размещенной под полкой, также позволяет освободить верхнюю поверхность столешницы и тем самым обеспечивает удобство эксплуатации ИРМ.
11. Введение каркасов, установленных в нишах под внешней частью полки, обеспечивает дальнейшее расширение возможностей ИРМ за счет размещения в них дополнительных систем и устройств, а также обеспечивает экономию площади производственного помещения.
Литература
1. RU 2 322 166.
2. RU 2253340.
3. RU 2225700, 03.03.2003.
4. http://www.vk-teeh.com.va/sections/index/11.
5. «Микропроцессорное управление технологическим оборудованием микроэлектроники». /Под ред. А.А.Сазонова. - М.: Радио и связь, 1988.
6. RU №2 329 191, 20.07.2008.
7. RU №2 308 083, 10.10.2007.
8. http://kanya.com.
9. www/elion.ru.
10. http://erb.ua/articles/156/3/ua-ru/.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ МЕСТО ПОЛЬЗОВАТЕЛЯ | 2010 |
|
RU2442516C1 |
| УНИВЕРСАЛЬНЫЙ СЪЕМНЫЙ ПОДЛОКОТНИК | 2010 |
|
RU2434565C1 |
| ЛАБОРАТОРНЫЙ КОМПЛЕКС ДЛЯ ОБУЧЕНИЯ ЕСТЕСТВОЗНАНИЮ | 2012 |
|
RU2595348C2 |
| СПОСОБ ОРГАНИЗАЦИИ МЕСТА ЗАНЯТИЙ И ОТДЫХА СТУДЕНТА (КАБИНЕТ) | 2017 |
|
RU2675223C1 |
| СТОЛ ЛАБОРАТОРНЫЙ | 2011 |
|
RU2462312C1 |
| СТОЛ ДЛЯ ПЕРСОНАЛЬНОЙ ЭВМ | 1992 |
|
RU2050815C1 |
| ТРАНСФОРМИРУЕМЫЙ СТОЛ-ТУМБА ДЛЯ ШВЕЙНОЙ МАШИНЫ | 2006 |
|
RU2337191C2 |
| ШКАФ ВЫТЯЖНОЙ | 2009 |
|
RU2393032C1 |
| ПРЕДМЕТ МЕБЕЛИ (ВАРИАНТЫ) | 1996 |
|
RU2150221C1 |
| Вакуумный взрывотехнический комплекс | 2018 |
|
RU2698372C1 |
Изобретение относится к области организации трудовых процессов инженерно-технических работников (ИТР). Интеллектуальное рабочее место содержит сопряженные между собой первую и вторую столешницы (1, 3), расположенные на первой и второй несущей конструкции (2, 4). С другой стороны - сопряжение с третьей столешницей (5), расположенной на третьей несущей конструкции (6). Внутри первой несущей конструкции (2), в ее верхней части, расположен ящик со съемными ячейками (13), оснащенный датчиками системы управления (14). Внутри второй несущей конструкции (4) размещен мини-склад (17) для комплектующих изделий, оснащенный датчиками системы управления (14). Внутри третьей несущей конструкции (6) размещены тумба с ящиками (18) и тумба для технической литературы (19), оснащенные датчиками системы управления (14), причем датчики (14) электрически сопряжены с блоком управления (15), а блок управления электрически сопряжен с ЭВМ. Технический результат заключается в расширении функциональных возможностей рабочего места и в повышении эффективности выполнения трудовых операций на основе автоматизации некоторых вспомогательных процедур и улучшения эргономических характеристик. 7 з.п. ф-лы, 10 ил.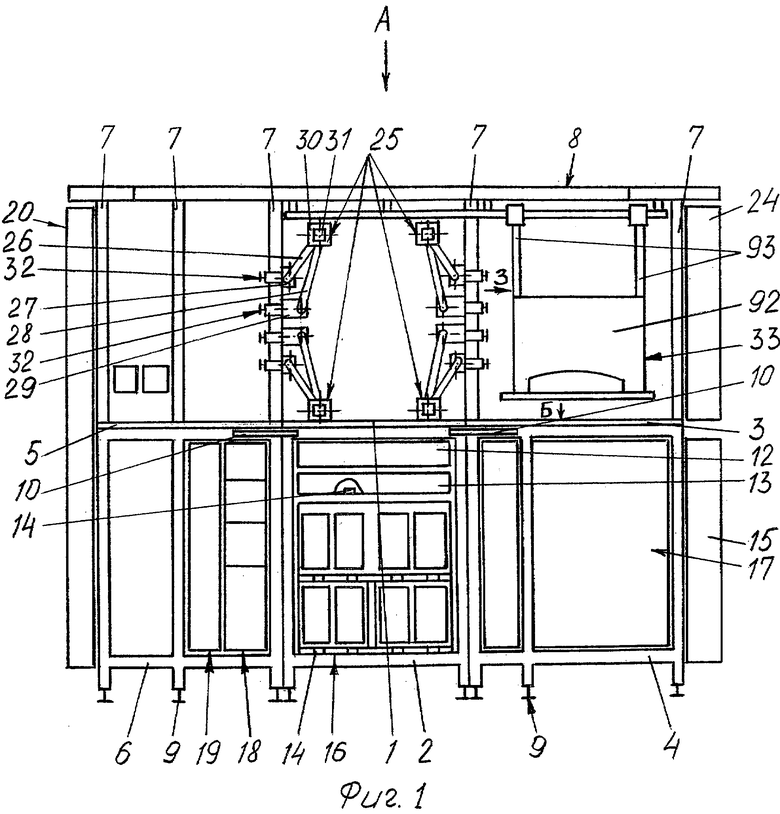
1. Интеллектуальное рабочее место, содержащее первую столешницу (1), расположенную на первой несущей конструкции (2) и имеющую с одной стороны сопряжение со второй столешницей (3), расположенной на второй несущей конструкции (4), а с другой стороны сопряжение с третьей столешницей (5), расположенной на третьей несущей конструкции (6), отличающееся тем, что внутри первой несущей конструкции (2), в ее верхней части, расположен ящик со съемными ячейками (13), оснащенный датчиками системы управления (14), внутри второй несущей конструкции (4) размещен мини-склад (17) для комплектующих изделий, оснащенный датчиками системы управления (14), внутри третьей несущей конструкции (6) размещена тумба с ящиками (18) и тумба для технической литературы (19), оснащенные датчиками системы управления (14), причем датчики (14) электрически сопряжены с блоком управления (15), а блок управления электрически сопряжен с ЭВМ.
2. Интеллектуальное рабочее место по п.1, отличающееся тем, что в него введены регулируемые подлокотники (10), расположенные на первой несущей конструкции (2) перед первой столешницей (1).
3. Интеллектуальное рабочее место по п.1, отличающееся тем, что в него введен выдвижной блок (16) с полками, оснащенными датчиками системы управления (14), электрически сопряженными с блоком управления (15), расположенный на первой несущей конструкции (2).
4. Интеллектуальное рабочее место по п.1, отличающееся тем, что в него введена полка (8), установленная на стойках (7) по средней линии полки (8), размещенная своей внутренней частью над первой столешницей (1), второй столешницей (3) и третьей столешницей (5) и образующая под своей внешней частью первую нишу (21), условно ограниченную задней частью первой столешницы (1), вторую нишу (22), условно ограниченную задней частью второй столешницы (3), третью нишу (23), условно ограниченную задней частью третьей столешницы (5).
5. Интеллектуальное рабочее место по п.4, отличающееся тем, что в него введено фиксирующее устройство (25) для чертежей, размещенное на стойках (7) над первой столешницей (1).
6. Интеллектуальное рабочее место по п.4, отличающееся тем, что в него введен закрытый бокс с транспортером элеваторного типа (20) со съемными ячейками, оснащенный датчиками системы управления (14), электрически сопряженными с блоком управления (15), при этом закрытый бокс с транспортером элеваторного типа (20) размещен в третьей нише (23).
7. Интеллектуальное рабочее место по п.4, отличающееся тем, что в него введена перемещаемая подставка (33) для дисплея ЭВМ, размещенная под полкой (8).
8. Интеллектуальное рабочее место по п.4, отличающееся тем, что в него введен каркас (24), размещенный во второй нише (22).
| РАБОЧЕЕ МЕСТО | 2003 |
|
RU2225700C1 |
| Хлебопекарная печь | 1974 |
|
SU504533A1 |
| Протез ноги | 1947 |
|
SU71913A1 |
| US 7430114 B2, 30.09.2008 | |||
| US 5094174 A1, 10.03.1992 | |||
| DE 4033010 A1, 23.04.1992. | |||

