Изобретение относится к измерительной технике и может быть использовано для регистрации деформаций поверхностей зданий и сооружений, испытуемых образцов и моделей из эквивалентных материалов, стенок горных выработок и т.п.
Известно устройство для регистрации перемещений (патент РФ №1307222, кл. G01B 5/30, 1987), содержащее основание с опорой, два преобразователя перемещений в двух взаимно перпендикулярный направлениях, один из которых предназначен для регистрации угловых, а другой - линейных перемещений.
Недостаток устройства состоит в том, что при обработке результатов измерений необходимо угловые и линейные перемещения пересчитывать в линейные по двум взаимно перпендикулярным направлениям. Устройство не позволяет также контролировать перемещение одновременно нескольких точек поверхности объекта относительно одной базовой плоскости. Кроме этого, устройство позволяет регистрировать перемещения только в двух координатах. Это снижает эффективность контроля деформаций поверхности объекта.
Известно устройство для регистрации трехкоординатных перемещений (патент РФ №1343237, кл. G01B 7/00, 1987), содержащее основание с опорой, три преобразователя перемещений в трех взаимно перпендикулярных направлениях, один из которых выполнен в виде стержня, один конец которого предназначен для взаимодействия с объектом, регистраторы реостатного типа с подвижным и неподвижным контактом, установленные на соответствующих преобразователях.
Недостаток устройства также состоит в том, что при обработке результатов измерений необходимо угловые и линейные перемещения пересчитывать в линейные по трем взаимно перпендикулярным направлениям. Устройство не позволяет также контролировать перемещение одновременно нескольких точек поверхности объекта относительно одной базовой плоскости. Это снижает эффективность контроля деформаций поверхности объекта.
Известно устройство для регистрации трехкоординатных перемещений (положительное решение по заявке 2008131663, кл G01B 7/012, от 20 августа 2009 г.), принимаемое за прототип. Устройство содержит основание с опорой, три преобразователя перемещений в трех взаимно перпендикулярных направлениях, в двух из которых выполнены продольные прорези, третий выполнен в виде стержня, один конец которого введен в прорези двух первых преобразователей, а второй предназначен для взаимодействия с объектом, регистраторы реостатного типа с подвижным и неподвижным контактом, установленные на соответствующих преобразователях
Недостаток устройства также состоит в том, что при обработке результатов измерений необходимо угловые и линейные перемещения пересчитывать в линейные по трем взаимно перпендикулярным направлениям. Устройство не позволяет также контролировать перемещение одновременно нескольких точек поверхности объекта относительно одной базовой плоскости. Это снижает эффективность контроля деформаций поверхности объекта.
Техническим результатом изобретения является повышение эффективности контроля деформаций поверхности объекта путем непосредственной регистрации линейных перемещений в трех взаимно перпендикулярных направлениях, а также путем контроля перемещений одновременно нескольких точек поверхности объекта относительно одной базовой плоскости.
Технический результат достигается тем, что устройство для регистрации трехкоординатных перемещений, содержащее основание с опорой, три преобразователя перемещений в трех взаимно перпендикулярных направлениях, в двух из которых выполнены продольные прорези, третий выполнен в виде стержня, один конец которого введен в прорези двух первых преобразователей, а второй предназначен для взаимодействия с объектом, регистраторы реостатного типа с подвижным и неподвижным контактом, установленные на соответствующих преобразователях, согласно изобретению два первых преобразователя выполнены в виде рамок, установленных на основании с возможностью перемещения перпендикулярно друг другу в двух параллельных плоскостях и прорези в них расположены взаимно перпендикулярно, а конец стержня закреплен на поверхности объекта жестко.
Технический результат достигается также тем, что опора выполнена в виде плиты, предназначенной для размещения вдоль поверхности объекта, при этом в плите выполнены прорези, расположенные в соответствии с расположением контролируемых точек на поверхности объекта, а в прорезях установлены дополнительные основания с преобразователями.
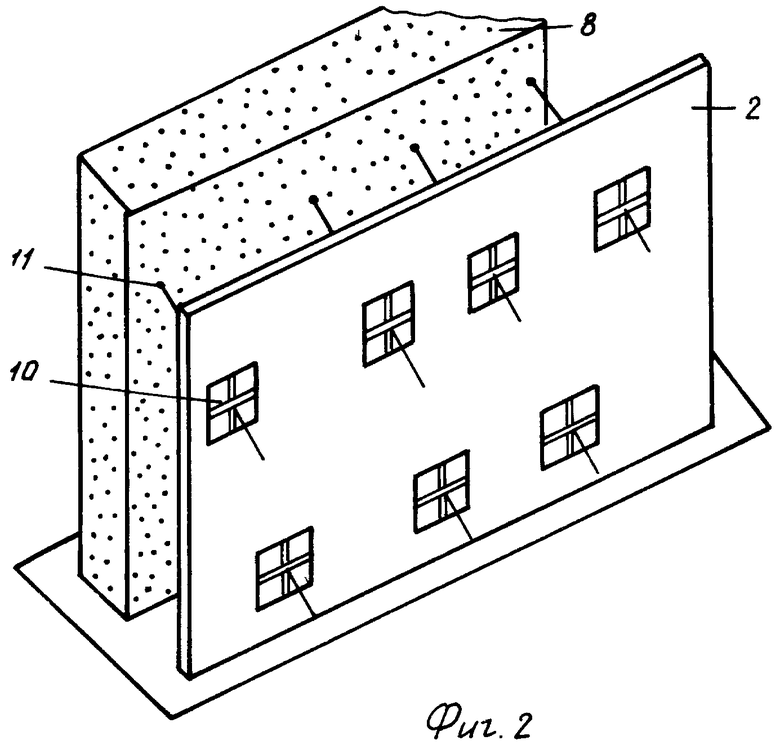
На фиг.1 представлена схема устройства, на фиг.2 - пример расположения устройства относительно объекта.
Устройство для регистрации трехкоординатных перемещений содержит основание 1 с опорой 2, три преобразователя перемещений 3, 4, 5 в трех взаимно перпендикулярных направлениях, в двух из которых 3, 4 выполнены продольные прорези 6, 7. Третий преобразователь 5 выполнен в виде стержня, один конец которого введен в прорези 6, 7 двух первых преобразователей, а второй предназначен для взаимодействия с объектом 8. Устройство имеет регистраторы 9 реостатного типа с подвижным и неподвижным контактом, установленные на соответствующих преобразователях 3, 4, 5.
Два первых преобразователя 3, 4 выполнены в виде рамок, установленных на основании 1 с возможностью перемещения перпендикулярно друг другу в двух параллельных плоскостях, и прорези 6, 7 в них расположены взаимно перпендикулярно. Конец стержня 5 закреплен на поверхности объекта 8 жестко.
Опора 2 выполнена в виде плиты, предназначенной для размещения вдоль поверхности объекта 8. В плите 2 выполнены прорези 10, расположенные в соответствии с расположением контролируемых точек 11 на поверхности объекта. В прорезях 10 установлены дополнительные основания 1 с преобразователями.
Жесткое крепление стержня 5 на поверхности объекта 8 осуществляется, например, приклеиваемой пластиной 12.
Устройство работает следующим образом.
При деформации объекта 8 происходит перемещение точек 11 его поверхности в трех взаимно перпендикулярных направлениях относительно опоры 2. При этом стержни 5 перемещают рамки преобразователей 3, 4 в плоскости основания 2, а сами стержни перемещаются перпендикулярно основанию 2. Эти перемещения регистрируются соответствующими регистраторами 9.
Предлагаемое устройство повышает эффективность контроля деформаций поверхности объекта путем непосредственной регистрации линейных перемещений в трех взаимно перпендикулярных направлениях, а также путем контроля перемещений одновременно нескольких точек поверхности объекта относительно одной базовой плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКООРДИНАТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2376552C1 |
| МНОГОКООРДИНАТНЫЙ ДАТЧИК ДЕФОРМАЦИОННОГО МОНИТОРИНГА | 2018 |
|
RU2677832C1 |
| Устройство для регистрации деформаций в грунтах | 1980 |
|
SU940102A1 |
| Трехкоординатный датчик перемещений | 1985 |
|
SU1343237A1 |
| ТРЕХКООРДИНАТНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ПРОФИЛЯ ЗУБОВ | 1996 |
|
RU2115385C1 |
| УСТРОЙСТВО И СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТУННЕЛЕЙ | 2006 |
|
RU2330238C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СДВИГОВ | 1992 |
|
RU2044261C1 |
| Трехкоординатное оптическое устройство | 1978 |
|
SU771464A1 |
| СПОСОБ КОНТРОЛЯ ПОВЕРХНОСТНЫХ ДЕФОРМАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2121655C1 |
| Устройство для записи деформаций грунта | 1986 |
|
SU1363101A1 |
Изобретение относится к измерительной технике и может быть использовано для регистрации деформации поверхности зданий и сооружений и т.п. Устройство содержит основание с опорой, три преобразователя перемещений в трех взаимно перпендикулярных направлениях, регистраторы реостатного типа с подвижным и неподвижным контактом. Особенностью данного устройства является то, что два первых преобразователя выполнены в виде рамок, установленных на основании с возможностью перемещения перпендикулярно друг другу в двух параллельных плоскостях, а прорези в них расположены взаимно перпендикулярно. Конец стержня третьего преобразователя закреплен на поверхности объекта жестко. Техническим результатом изобретения является повышение эффективности контроля деформаций поверхности объекта. 1 з.п. ф-лы, 2 ил.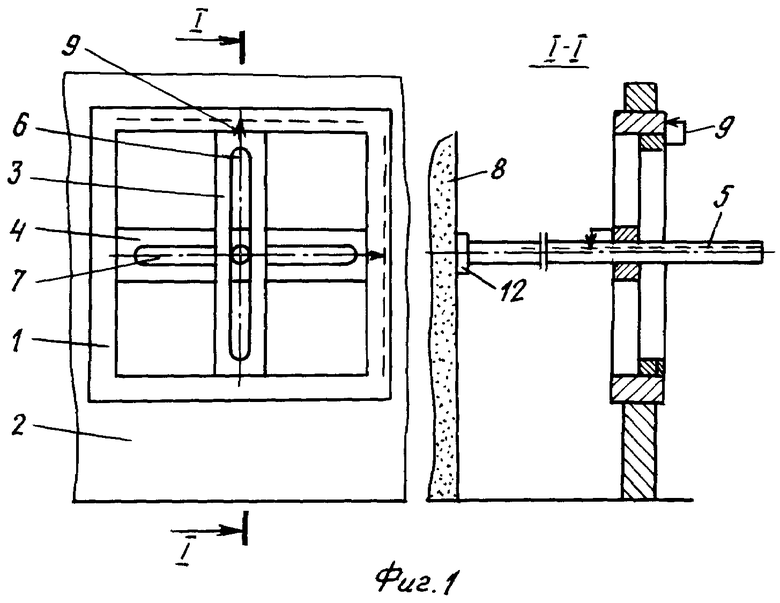
1. Устройство для регистрации трехкоординатных перемещений, содержащее основание с опорой, три преобразователя перемещений в трех взаимно перпендикулярных направлениях, в двух из которых выполнены продольные прорези, третий выполнен в виде стержня, один конец которого введен в прорези двух первых преобразователей, а второй предназначен для взаимодействия с объектом, регистраторы реостатного типа с подвижным и неподвижным контактом, установленные на соответствующих преобразователях, отличающееся тем, что два первых преобразователя выполнены в виде рамок, установленных на основании с возможностью перемещения перпендикулярно друг другу в двух параллельных плоскостях, прорези в них расположены взаимно перпендикулярно, а конец стержня закреплен на поверхности объекта жестко.
2. Устройство по п.1, отличающееся тем, что опора выполнена в виде плиты, предназначенной для размещения вдоль поверхности объекта, при этом в плите выполнены прорези, расположенные в соответствии с расположением контролируемых точек на поверхности объекта, а в прорезях установлены дополнительные основания с преобразователями.
| CN 101451816 A, 10.06.2009 | |||
| Трехкоординатный датчик линейных и угловых перемещений | 1974 |
|
SU513236A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ ПОВЕРХНОСТИ | 1990 |
|
SU1708053A1 |
| RU 95109996 A1, 20.05.1997 | |||
| Трехкоординатный датчик перемещений | 1979 |
|
SU848984A1 |

