Изобретение относится к измерительной технике и может быть использовано для деформационного мониторинга различных объектов.
Известен датчик деформационного мониторинга (патент РФ №1093811, опубл. 23.05.1984) содержащий основание с опорой, преобразователь линейных перемещений, регистратор линейных перемещений реостатного типа с неподвижным и подвижным контактами.
Недостаток датчика состоит в том, что в нем отсутствуют конструктивные элементы, обеспечивающие измерения угловых перемещений и угловых поворотов объекта, что ограничивает его технические возможности.
Известен двухкоординатный деформационного мониторинга (патент РФ №1307222, опубл. 30.04.1987), содержащий основание с опорой, преобразователь линейных одноосных перемещений, преобразователь угловых перемещений, регистратор линейных одноосных перемещений и регистратор угловых перемещений. Датчик позволяет измерять одноосное и угловое перемещение в одной плоскости.
Недостатками этого датчика также является отсутствие конструктивных элементов, обеспечивающих измерения угловых перемещений и угловых поворотов объекта, что ограничивает его технические возможности.
Известен трехкоординатный датчик деформационного мониторинга (патент РФ №1343237, опубл. 07.10.1987). Трехкоординатный датчик перемещений содержит основание с опорой, преобразователь линейных одноосных перемещений и два преобразователя угловых перемещений, регистраторы реостатного типа с подвижным и неподвижным контактом каждый, установленные на соответствующих преобразователях. Датчик измеряет линейное и два угловых перемещения.
Недостаток этого датчика также состоит в том, что в нем отсутствуют конструктивные элементы, обеспечивающие измерения угловых перемещений и угловых поворотов объекта, что ограничивает его технические возможности.
Известен трехкоординатный датчик деформационного мониторинга (патент РФ №2376552, опубл. 20.12.2009), принимаемый за прототип. Датчик содержит основание с опорой, установленное на основании шаровое сочленение с отверстием, преобразователь линейных одноосных перемещений в виде стержня, предназначенного для контакта с объектом мониторинга и размещенного в отверстии шара, два преобразователя угловых перемещений в виде полуколец с продольными прорезями для размещения одного конца стержня и с концами, установленными на основании на двух взаимно перпендикулярных осях с возможностью поворота, регистраторы угловых перемещений, неподвижные контакты которых установлены на внутренней стороне прорезей, а подвижным контактом является стержень, и регистратор линейных одноосных перемещений, неподвижный контакт которого установлен на стержне, а его подвижный контакт установлен на шаре.
Недостаток этого датчика также заключается в том, что в нем отсутствуют конструктивные элементы, обеспечивающие измерения угловых перемещений и угловых поворотов объекта, что ограничивает его технические возможности.
Техническим результатом является расширение технических возможностей датчиков деформационного мониторинга за счет обеспечения регистрации не только линейных и угловых перемещений объекта, но и его угловых поворотов.
Технический результат достигается тем, что датчик дополнительно снабжен карданным валом с двумя полуосями, на первой полуоси карданного вала установлена площадка, жестко соединенная с объектом мониторинга, и датчиком угловых поворотов, подвижный контакт которого закреплен на второй полуоси карданного вала, а неподвижный контакт закреплен на стержне, при этом стержень соединен с карданным валом с возможностью взаимного поворота и выполнен в форме квадратного сечения.
Устройство поясняется следующими фигурами:
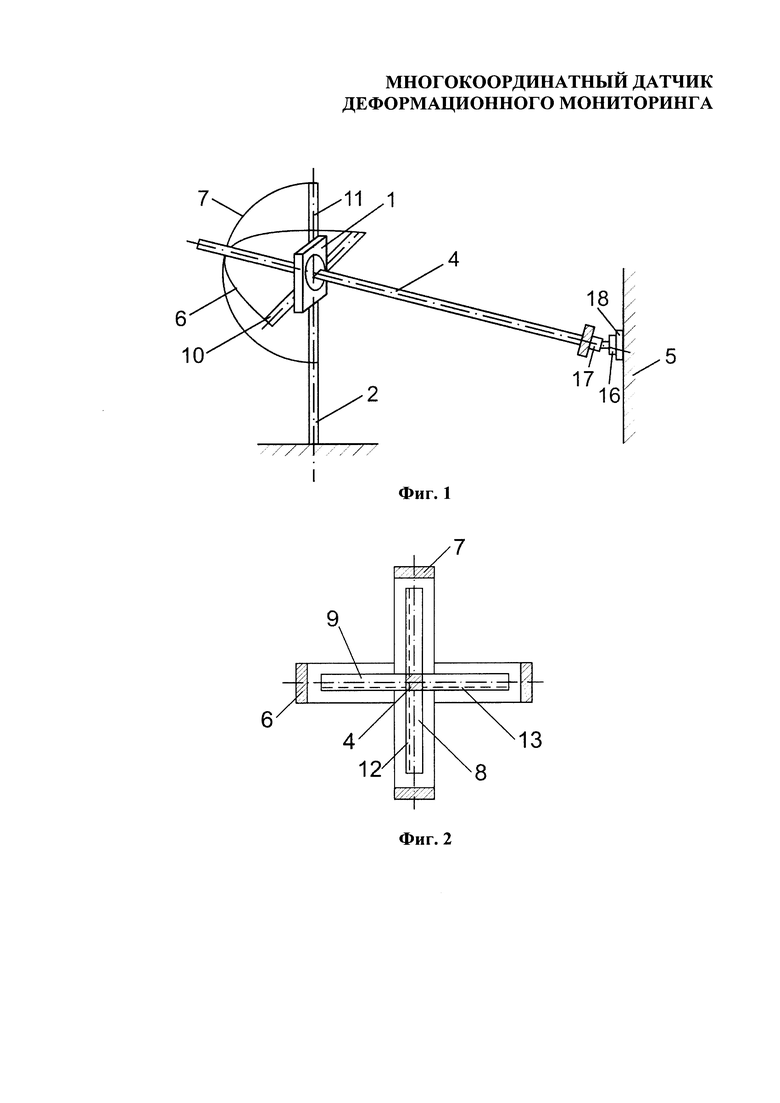
фиг. 1 - общий вид;
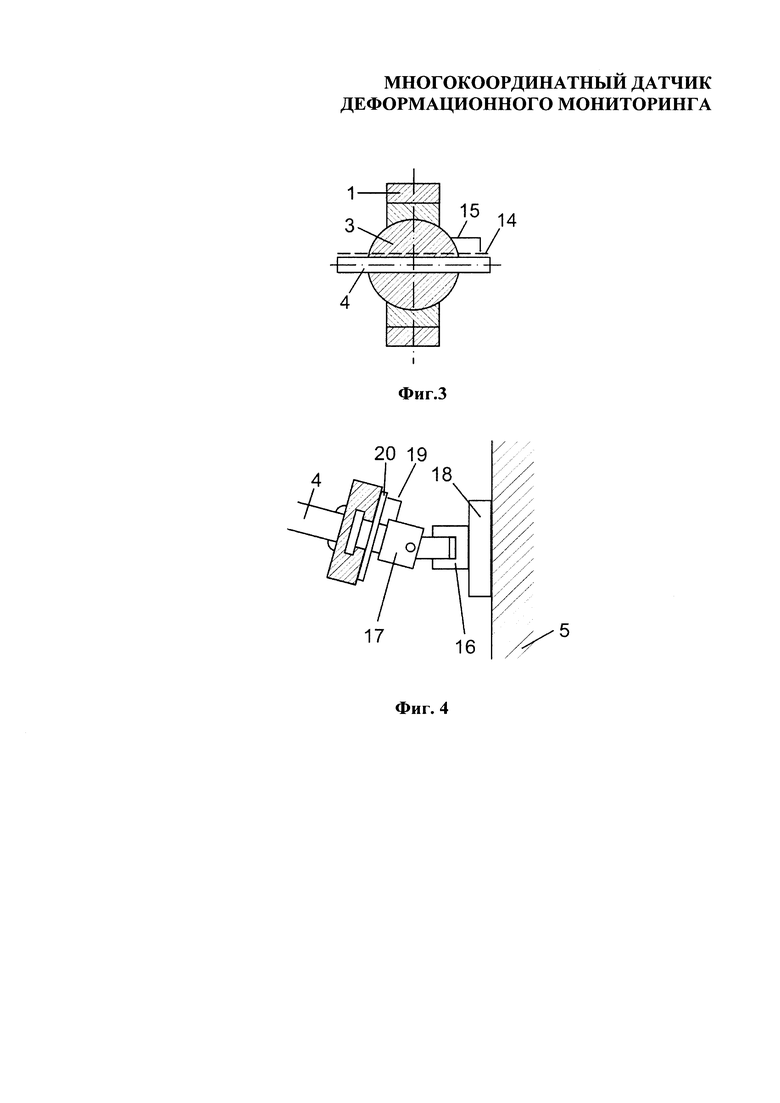
фиг. 2 - преобразователи угловых перемещений;
фиг. 3 - узел шарового сочленения;
фиг. 4 - узел соединения датчика поворотов с карданным валом, где:
1 - основание;
2 - опора;
3 - шаровое сочленение с отверстием;
4 - стержень квадратного сечения;
5 - объект мониторинга;
6 - полукольцо горизонтальное;
7 - полукольцо вертикальное;
8 - продольная вертикальная прорезь;
9 - продольная горизонтальная прорезь;
10 - горизонтальная ось;
11 - вертикальная ось;
12 - неподвижный контакт вертикального датчика;
13 - неподвижный контакт горизонтального датчика;
14 - неподвижный контакт линейного датчика;
15 - подвижный контакт линейного датчика;
16 - первая полуось карданного вала;
17 - вторая полуось карданного вала;
18 - площадка;
19 - подвижный контакт датчика угловых поворотов;
20 - неподвижный контакт датчика угловых поворотов.
Многокоординатный датчик деформационного мониторинга содержит основание 1 с установленной на нем с опорой 2, шаровое сочленение с отверстием 3, преобразователь линейных одноосных перемещений в виде стержня квадратного сечения 4, предназначенного для контакта с объектом мониторинга 5 и размещенного в отверстии шарового сочленения 3, два преобразователя угловых перемещений в виде горизонтального полукольца 6 и вертикального полукольца 7 с продольной вертикальной прорезью 8 и продольной горизонтальной прорезью 9 для размещения одного конца стержня квадратного сечения 4 и с концами, установленными на основании на взаимно перпендикулярных горизонтальной оси 10 и вертикальной оси 11 с возможностью поворота (фиг. 1), регистраторы угловых перемещений, неподвижный контакт вертикального датчика 12 и неподвижный контакт горизонтального датчика 13 которых установлены на внутренней стороне продольной вертикальной прорези 8 и продольной горизонтальной прорези 9 (фиг. 2), а подвижным контактом является стержень квадратного сечения 4, и регистратор линейных одноосных перемещений, неподвижный контакт линейного датчика 14 которого установлен на стержне квадратного сечения 4, а его подвижный контакт линейного датчика 15 установлен на шаровом сочленении с отверстием 3 (фиг. 3).
Датчик дополнительно снабжен карданным валом, включающим первую полуось карданного вала 16 и вторую полуось карданного вала 17, площадкой 18, закрепленной на первой полуоси карданного вала 16 и жестко соединяемой с объектом мониторинга 5, и датчиком угловых поворотов, включающим подвижный контакт датчика угловых поворотов 19, закрепленный на второй полуоси карданного вала 17, и неподвижный контакт датчика угловых поворотов 20, закрепленный на стержне квадратного сечения 4, при этом стержень квадратного сечения 4 соединен с карданным валом с возможностью взаимного поворота и имеет квадратное сечение (фиг. 4).
Датчики могут быть выполнены реостатными с неподвижным контактом вертикального датчика 12, неподвижным контактом горизонтального датчика 13, неподвижным контактом линейного датчика 14, неподвижным контактом 20 в виде высокоомных проволок. Регистрирующая аппаратура на чертежах не показана.
Многокоординатный датчик деформационного мониторинга работает следующим образом. Устанавливают датчик на опоре 2 в базовой измерительной точке и закрепляют площадку 18 на объекте мониторинга 5. При линейных одноосных перемещениях объекта мониторинга 5 стержень квадратного сечения 4 перемещается вместе с неподвижным контактом линейного датчика 14 относительно подвижного контакта линейного датчика 15, что регистрируется аппаратурой (не показана). При угловых перемещениях объекта мониторинга 5 стержень квадратного сечения 4 совершает соответствующие повороты вместе с шаром шарнирного соединения с отверстием 3 и поворачивает горизонтальное полукольцо 6 и вертикальное полукольцо 7. При поворотах полуколец стержень квадратного сечения 4 перемещается относительно неподвижного контакта вертикального датчика 12 и неподвижного контакта горизонтального датчика 13 и изменяет электрическое сопротивление соответствующих измерительных каналов аппаратуры. При угловых поворотах объекта мониторинга 5 карданный вал с первой полуосью карданного вала 16 и второй полуосью карданного вала 17 поворачивает подвижный контакт 19 относительно неподвижного контакта 20, что также регистрируется соответствующим измерительным каналом аппаратуры. В результате регистрируются все линейные одноосные, угловые перемещения объекта и угловые повороты объекта.
Таким образом, предлагаемое изобретение существенно расширяет технические возможности датчиков деформационного мониторинга за счет обеспечения регистрации не только линейных и угловых перемещений объекта, но и его угловых поворотов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКООРДИНАТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2376552C1 |
| УСТРОЙСТВО И СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТУННЕЛЕЙ | 2006 |
|
RU2330238C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТНЫХ ХАРАКТЕРИСТИК АНИЗОТРОПНЫХ СТЕРЖНЕЙ | 2010 |
|
RU2435153C1 |
| МЕХАНИЗМ (ВАРИАНТЫ) И СПОСОБ ИДЕНТИЧНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАПЕЦИЕВИДНЫМ КАЧАЮЩИМСЯ РЫЧАГОМ С РАДИАЛЬНОЙ ТЯГОЙ И МНОГОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2760795C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ТРЕХКООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2417350C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2003 |
|
RU2245512C1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПО АНАЛИТИЧЕСКОЙ ИНФОРМАЦИИ КОМПЕНСАТОРНЫХ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2126305C1 |
| УСТРОЙСТВО ДЛЯ НАПЫЛЕНИЯ ТОНКОПЛЕНОЧНЫХ ПОКРЫТИЙ НА СФЕРИЧЕСКИЕ РОТОРЫ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2014 |
|
RU2555699C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2087876C1 |
Изобретение может быть использовано для деформационного мониторинга различных объектов. Многокоординатный датчик содержит основание с опорой, установленное на основании шаровое сочленение с отверстием, преобразователь линейных одноосных перемещений в виде стержня, предназначенного для контакта с объектом мониторинга, два преобразователя угловых перемещений в виде полуколец с продольными прорезями, регистраторы угловых перемещений, неподвижные контакты которых установлены на внутренней стороне прорезей, а подвижным контактом является стержень, и регистратор линейных одноосных перемещений, неподвижный контакт которого установлен на стержне, а его подвижный контакт установлен на шаре. Датчик снабжен карданным валом, площадкой, закрепленной на первой полуоси карданного вала и предназначенной для жесткого соединения с объектом мониторинга, и датчиком угловых поворотов, подвижный контакт которого закреплен на второй полуоси карданного вала, а неподвижный контакт закреплен на стержне, при этом стержень соединен с карданным валом с возможностью взаимного поворота и имеет квадратное сечение. Техническим результатом является расширение технических возможностей датчика за счет обеспечения регистрации линейных и угловых перемещений объекта, а также его угловых поворотов. 4 ил.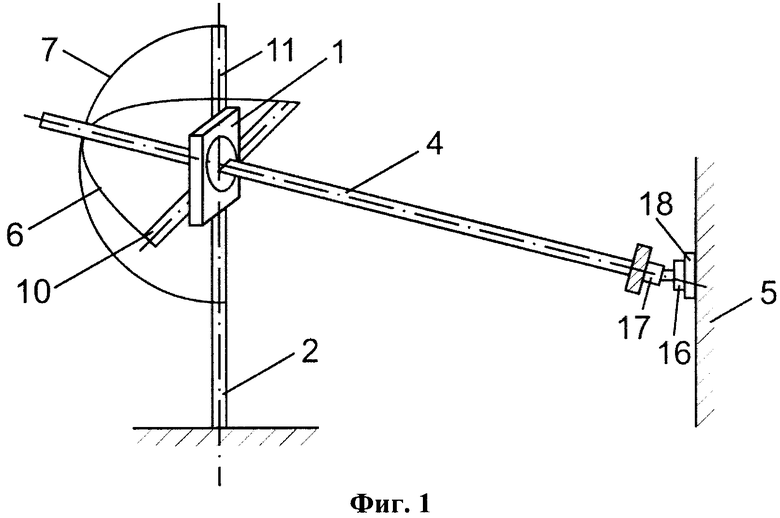
Многокоординатный датчик деформационного мониторинга, содержащий основание с опорой, установленное на основании шаровое сочленение с отверстием, преобразователь линейных одноосных перемещений в виде стержня, предназначенного для контакта с объектом мониторинга и размещенного в отверстии шара, два преобразователя угловых перемещений в виде полуколец с продольными прорезями для размещения одного конца стержня и с концами, установленными на основании на двух взаимно перпендикулярных осях с возможностью поворота, регистраторы угловых перемещений, неподвижные контакты которых установлены на внутренней стороне прорезей, а подвижным контактом является стержень, и регистратор линейных одноосных перемещений, неподвижный контакт которого установлен на стержне, а его подвижный контакт установлен на шаре, отличающийся тем, что он дополнительно снабжен карданным валом с двумя полуосями, на первой полуоси карданного вала установлена площадка, жестко соединенная с объектом мониторинга, и датчиком угловых поворотов, подвижный контакт которого закреплен на второй полуоси карданного вала, а неподвижный контакт закреплен на стержне, при этом стержень соединен с карданным валом с возможностью взаимного поворота и выполнен в форме квадратного сечения.
| Устройство для измерения продольных и угловых деформаций образца | 1985 |
|
SU1364858A1 |
| Прибор для контроля изделий с винтовой поверхностью | 1975 |
|
SU513241A1 |
| Устройство для автоматического включения сигнала по достижении счетчиком определенного числа | 1959 |
|
SU131147A1 |
| Трехкоординатный датчик перемещений | 1985 |
|
SU1343237A1 |
| JP 2007309659 A, 29.11.2007. | |||

