Изобретение относится к измерительной технике и может быть использовано для измерения перемещений объектов, для регистрации деформаций стенок горных выработок, образцов при механических испытаниях.
Известен датчик перемещений (патент РФ №1093811, кл. Е21С 39/00, G01В 7/00, 1984), содержащий основание с опорой, преобразователь линейных перемещений, регистратор линейных перемещений реостатного типа с неподвижным и подвижным контактами.
Недостаток этого датчика состоит в ограниченных возможностях, обеспечивающих измерение только по одной оси перемещений. К тому же между объектом и регистратором размещено преобразующее устройство, что неизбежно снижает точность измерений и усложняет конструкцию.
Известен датчик перемещений (патент РФ №1307222, кл. G01В 5/30, 1987), содержащий основание с опорой, преобразователь линейных одноосных перемещений, преобразователь угловых перемещений, регистратор линейных одноосных перемещений и регистратор угловых перемещений. Датчик позволяет измерять одноосное и угловое перемещение в одной плоскости.
Недостатками этого датчика является отсутствие возможности регистрации второго углового перемещения и низкая точность измерений из-за использования преобразующих устройств между объектом и регистраторами.
Известен трехкоординатный датчик перемещений (патент РФ №1343237, кл. G01В 7/00, 1987), принимаемый за прототип. Трехкоординатный датчик перемещений содержит основание с опорой, преобразователь линейных одноосных перемещений и два преобразователя угловых перемещений, регистраторы реостатного типа с подвижным и неподвижным контактом каждый, установленные на соответствующих преобразователях. Датчик измеряет линейное и два угловых перемещения.
Недостатком датчика является низкая точность измерений. Между регистраторами измерений и объектом расположены зубчатые преобразователи, неизбежно вносящие погрешность из-за люфтов в зубчатых зацеплениях и в кулисе.
Техническим результатом изобретения является повышение точности измерений путем сокращения передающих элементов от объекта до регистраторов.
Технический результат достигается тем, что трехкоординатный датчик перемещений, содержащий основание с опорой, преобразователь линейных одноосных перемещений и два преобразователя угловых перемещений, регистраторы реостатного типа с подвижным и неподвижным контактом каждый, установленные на соответствующих преобразователях, согласно изобретению на основании установлено шаровое сочленение, в шаре которого выполнено отверстие и в нем размещен преобразователь линейных одноосных перемещений, выполненный в виде стержня, преобразователи угловых перемещений выполнены в виде полуколец, концы которых установлены на основании на двух взаимно перпендикулярных осях с возможностью поворота, в полукольцах выполнены продольные прорези, один конец стержня введен в прорези полуколец, второй предназначен для взаимодействия с объектом, неподвижные контакты регистраторов угловых перемещений установлены на внутренней стороне прорезей, их подвижным контактом является стержень, неподвижный контакт регистратора линейных перемещений установлен на стержне, а его подвижный контакт установлен на шаре.
При такой конструкции датчика единственным элементом между объектом и всеми регистраторами является стержень. Он передает на регистратор линейные одноосные перемещения и, будучи подвижным контактом угловых регистраторов, прямо передает угловые перемещения на соответствующие регистраторы. Никаких взаимно подвижных соединительных элементов на пути передачи перемещений нет, что повышает точность измерений и обеспечивает достижение технического результата.
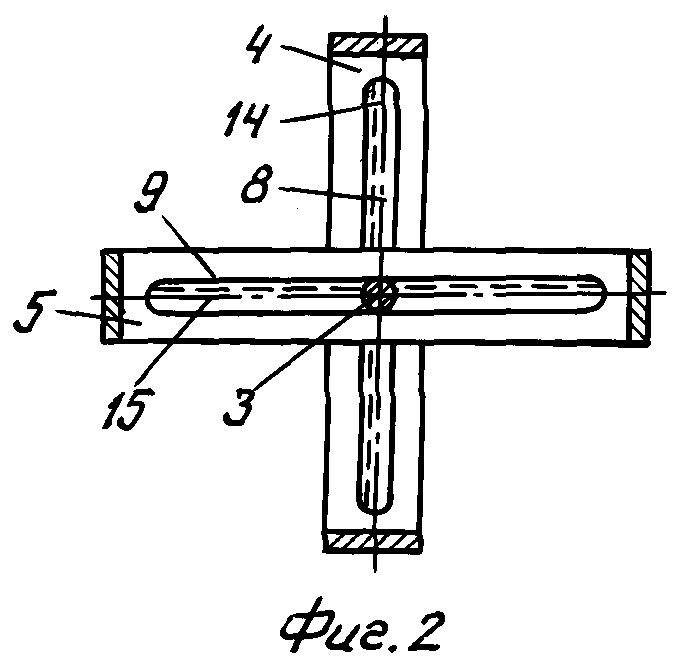
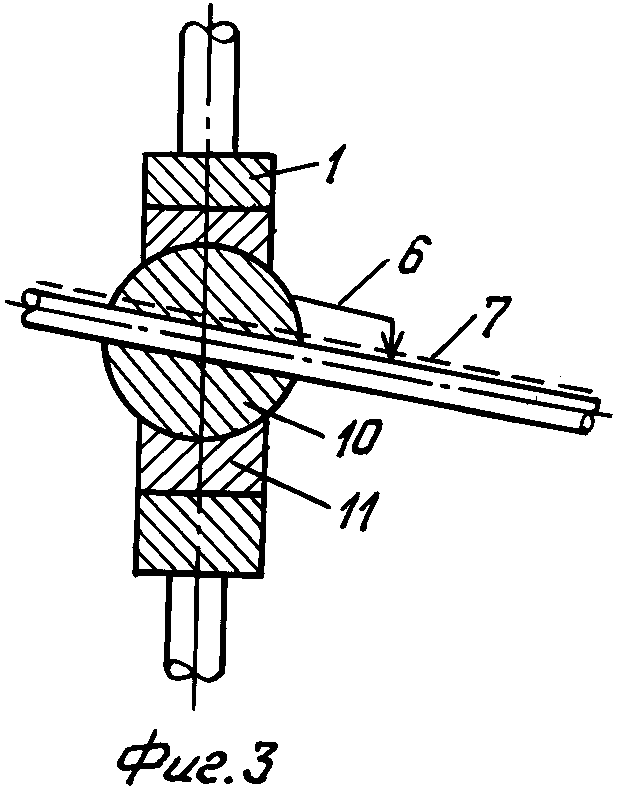
На чертежах представлена схема датчика: фиг.1 - общий вид; фиг.2 - преобразователи угловых перемещений; фиг.3 - узел шарового сочленения.
Трехкоординатный датчик перемещений содержит основание 1 с опорой 2, преобразователь 3 линейных одноосных перемещений и два преобразователя угловых перемещений 4, 5, регистраторы реостатного типа с подвижным 6 и неподвижными 7, 8, 9 контактами каждый, установленные на соответствующих преобразователях.
На основании установлено шаровое сочленение 10, 11, в шаре 10 которого выполнено отверстие и в нем размещен преобразователь линейных одноосных перемещений, выполненный в виде стержня 3, преобразователи угловых перемещений выполнены в виде полуколец 4, 5, концы которых установлены на основании 1 на двух взаимно перпендикулярных осях 12, 13 с возможностью поворота. В полукольцах 4, 5 выполнены продольные прорези 14, 15. Один конец стержня 3 введен в прорези 14, 15 полуколец, второй предназначен для взаимодействия с объектом 16. Неподвижные контакты 8, 9 регистраторов угловых перемещений установлены на внутренней стороне прорезей 14, 15, их подвижным контактом является стержень 3. Неподвижный контакт 7 регистратора линейных перемещений установлен на стержне 3, а его подвижный контакт 6 установлен на шаре.
Неподвижные контакты могут представлять отрезки высокоомной проволоки. Регистрирующая тензометрическая аппаратура на чертежах не показана.
Датчик работает следующим образом.
Устанавливают датчик на опоре 2 в базовой измерительной точке и закрепляют конец стержня 3 на объекте 16. При линейных одноосных перемещениях объекта 16 стержень 3 перемещается вместе с контактом 7 относительно контакта 6, что регистрируется аппаратурой (не показана). При угловых перемещениях объекта стержень 3 совершает соответствующие повороты вместе с шаром 10 и поворачивает полукольца 4, 5. При поворотах полуколец стержень 3 перемещается относительно неподвижных контактов 8, 9 и изменяет электрическое сопротивление соответствующих измерительных каналов аппаратуры. В результате регистрируются все линейные одноосные и угловые перемещения объекта.
Изобретение позволяет регистрировать перемещения по трем координатам с высокой точностью благодаря минимальному количеству промежуточных элементов между объектом и регистраторами перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКООРДИНАТНЫЙ ДАТЧИК ДЕФОРМАЦИОННОГО МОНИТОРИНГА | 2018 |
|
RU2677832C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ТРЕХКООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ | 2009 |
|
RU2417350C1 |
| Трехкоординатный датчик перемещений | 1985 |
|
SU1343237A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТНЫХ ХАРАКТЕРИСТИК АНИЗОТРОПНЫХ СТЕРЖНЕЙ | 2010 |
|
RU2435153C1 |
| УСТРОЙСТВО ШИРОКОДИАПАЗОННОЕ ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА НА МОТИВАЦИОННОЙ ОСНОВЕ | 2009 |
|
RU2402269C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2007 |
|
RU2339908C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО РАСПРЕДЕЛЕНИЯ ИЗЛУЧЕНИЯ, ОТРАЖЕННОГО ОТ ИССЛЕДУЕМОЙ ПОВЕРХНОСТИ ОБЪЕКТА | 2006 |
|
RU2319117C1 |
| КОПИРОВАЛЬНЫЙ ЩУП С ТРЕХКООРДИНАТНОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ УПРАВЛЕНИЯ ИЗМЕРЕНИЕМ | 1991 |
|
RU2025649C1 |
| УСТРОЙСТВО ТРЕХКООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ | 2013 |
|
RU2548163C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ПОЛЯ АНТЕННЫ | 1991 |
|
SU1841106A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений объектов, для регистрации деформаций стенок горных выработок, образцов при механических испытаниях. Техническим результатом изобретения является повышение точности измерений путем сокращения передающих элементов от объекта до регистраторов. Трехкоординатный датчик перемещений содержит основание с опорой, преобразователь линейных одноосных перемещений и два преобразователя угловых перемещений, регистраторы реостатного типа с подвижным и неподвижным контактом каждый, установленные на соответствующих преобразователях. На основании установлено шаровое сочленение, в шаре которого выполнено отверстие и в нем размещен преобразователь линейных одноосных перемещений, выполненный в виде стержня. Преобразователи угловых перемещений выполнены в виде полуколец, концы которых установлены на основании на двух взаимно перпендикулярных осях с возможностью поворота. В полукольцах выполнены продольные прорези. Один конец стержня введен в прорези полуколец, второй предназначен для взаимодействия с объектом, неподвижные контакты регистраторов угловых перемещений установлены на внутренней стороне прорезей, их подвижным контактом является стержень, неподвижный контакт регистратора линейных одноосных перемещений установлен на стержне, а его подвижный контакт установлен на шаре. 3 ил.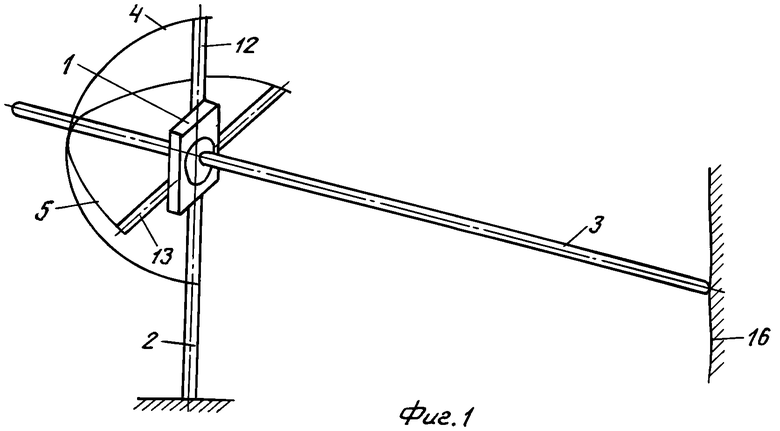
Трехкоординатный датчик перемещений, содержащий основание с опорой, преобразователь линейных одноосных перемещений и два преобразователя угловых перемещений, регистраторы реостатного типа с подвижным и неподвижным контактом каждый, установленные на соответствующих преобразователях, отличающийся тем, что на основании установлено шаровое сочленение, в шаре которого выполнено отверстие и в нем размещен преобразователь линейных одноосных перемещений, выполненный в виде стержня, преобразователи угловых перемещений выполнены в виде полуколец, концы которых установлены на основании на двух взаимно перпендикулярных осях с возможностью поворота, в полукольцах выполнены продольные прорези, один конец стержня введен в прорези полуколец, второй предназначен для взаимодействия с объектом, неподвижные контакты регистраторов угловых перемещений установлены на внутренней стороне прорезей, их подвижным контактом является стержень, неподвижный контакт регистратора линейных одноосных перемещений установлен на стержне, а его подвижный контакт установлен на шаре.
| Трехкоординатный датчик линейных и угловых перемещений | 1974 |
|
SU513236A1 |
| Трехкоординатный датчик перемещений | 1979 |
|
SU848984A1 |
| Способ измерения длин и углов и устройство для его осуществления | 1990 |
|
SU1820207A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ ПРЯМОЛИНЕЙНОСТИ | 1994 |
|
RU2094756C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2197713C2 |

