Родственные заявки
Настоящая заявка испрашивает приоритет предварительной заявки США №60/816281, «ULTRA-HIGH DATA RATE (UHDR) FOR MOBILE BROADBAND WIRELESS ACCESS», поданной 23 июня 2006 года, предварительной патентной заявки США №60/815664, «BAND WIDTH ALLOCATION FOR WIRELESS COMMUNICATION SYSTEM», поданной 21 июня 2006 года, и предварительной патентной заявки США №60/815773 «SUPERFRAME STRUCTURE FOR WIRELESS COMMUNICATION SYSTEM», поданной 21 июня 2006 года, содержание которых целиком включено сюда посредством ссылки.
Область техники, к которой относится изобретение
Различные варианты имеют целью создание способов и устройства беспроводной связи и, в частности, касаются передачи и/или использования информации о помехах.
Уровень техники
Системы беспроводной связи стали превалирующим средством, с помощью которого множество людей во всем мире выходят на связь. Устройства беспроводной связи стали меньше по размеру и энергопотреблению, удовлетворяя потребности пользователей при улучшении портативности и удобства пользования. Увеличение производительности мобильных устройств, таких как сотовые телефоны, привело к возрастанию требований к системам передачи в беспроводных сетях. Упомянутые системы, как правило, обновляются не так легко, как сотовые устройства, осуществляющие связь через эти сети. Так как возможности мобильных устройств расширяются, это может затруднить поддержку устаревших беспроводных сетевых систем, обеспечивающую полное использование новых и расширенных возможностей беспроводных устройств.
В системах беспроводной связи обычно используются различные подходы для создания источников передачи в виде каналов. Этими системами могут быть системы, использующие мультиплексирование с кодовым разделением каналов (CDM), системы, использующие мультиплексирование с частотным разделением каналов (FDM), и системы, использующие мультиплексирование с временным разделением каналов (TDM). Одним из обычно используемых вариантов FDM является мультиплексирование с ортогональным частотным разделением каналов (OFDM), при котором осуществляется эффективное разбиение всей полосы пропускания системы на множество ортогональных поднесущих. Эти поднесущие могут также называться тональными сигналами, элементами дискретизации (“bins”) и частотными каналами. Каждая поднесущая может быть модулирована данными. При использовании способов на основе временного разделения каждая поднесущая может быть использована во всех или части последовательных временных квантов или временных интервалов. Для каждого пользователя может быть предусмотрен один или несколько временных интервалов и комбинации поднесущих для передачи и приема информации в определенном периоде пакета или кадре. Схемы скачкообразной перестройки в общем случае могут представлять собой схему скачкообразной перестройки скорости передачи символов или схему скачкообразной блочной перестройки.
В способах на основе кодового разделения каналов данные, как правило, передаются на нескольких частотах, доступных в любой момент в некотором диапазоне. В общем случае данные оцифровываются и расширяются по доступной полосе пропускания, где множество пользователей могут поочередно занимать канал, и соответствующим пользователям может быть присвоен уникальный код следования. Пользователи могут осуществлять передачу в одном и том же широкополосном участке спектра, где каждый сигнал пользователя расширен по всей полосе пропускания соответствующим уникальным расширяющим кодом. Этот способ может обеспечить совместное использование ресурсов, когда один или несколько пользователей могут одновременно осуществлять передачу и прием. Указанное совместное использование может быть достигнуто посредством цифровой модуляции с расширенным спектром, где поток бит пользователя кодируется и расширяется по очень широкому каналу псевдослучайным образом. Приемник предназначен для распознавания соответствующего уникального кода следования и устранения рандомизации, для того чтобы собрать биты для конкретного пользователя в логической последовательности.
Типовая сеть беспроводной связи (например, использующая способы частотного, временного и/или кодового разделения каналов) включает в себя одну или несколько базовых станций, которые обеспечивают зону покрытия, и один или несколько мобильных (например, беспроводных) терминалов, которые могут передавать и принимать данные в зоне покрытия. Типовая базовая станция может непрерывно передавать множество потоков данных для услуг широковещания, группового вещания и/или однонаправленного (индивидуального) вещания, где поток данных представляет собой поток данных, который может не зависеть от того, насколько он интересен конкретному мобильному терминалу. Мобильный терминал в зоне покрытия данной базовой станции может быть заинтересован в приеме одного, нескольких или всех потоков данных, передаваемых от этой базовой станции. Аналогичным образом, мобильный терминал может передавать данные на базовую станцию или другому мобильному терминалу. В этих системах полоса пропускания и другие системные ресурсы распределяются с использованием планировщика.
Способы и устройство для осуществления связи и/или использования информации о помехах облегчают эффективное использование полосы пропускания. Соответственно, имеется потребность в новых и/или усовершенствованных способах эффективной передачи информации о помехах и (но не обязательно) новом способе использования переданной информации о помехах.
Раскрытие изобретения
Описаны способы и устройство беспроводной связи, которые обеспечивают эффективную передачу управляющей информации, включая информацию о помехах. Устройство связи, например базовая станция, измеряет информацию о помехах, например информацию о помехах от других секторов. Устройство связи создает преамбулу, которая включает в себя множество пилот-символов. В некоторых вариантах, по меньшей мере, один из пилот-символов включает в себя информацию о помехах. В некоторых вариантах преамбула является частью временной/частотной структуры, например повторяющейся структуры суперкадра, включающей в себя преамбулу и множество последовательных кадров. В некоторых вариантах некоторые из последовательных кадров используют для пересылки данных трафика. Преамбула в некоторых вариантах представляет собой небольшой непрерывный блок символов OFDM, используемых для пересылки пилот-сигналов, информации о конфигурации системы и/или пейджинговой информации, причем, по меньшей мере, один из пилот-символов несет информацию о помехах. Устройство связи передает преамбулу, тем самым обеспечивая в своей окрестности широковещательную передачу информации о помехах на терминалы доступа, и которые могут использовать и указанную информацию для принятия обоснованных решений по управлению передачей.
Терминал доступа принимает преамбулу, включающую в себя множество пилот-символов, где, по меньшей мере, один из пилот-символов включает в себя информацию о помехах. Например, в некоторых вариантах информацию о помехах несет на себе один или несколько пилот-символов OFDM. Информацию о помехах может легко нести канал помех от других секторов, соответствующий всем либо части из одного или нескольких пилот-символов OFDM. В одном указанном варианте для переноса информации о помехах от других секторов используют пилот-символ OFDM, который идентифицирует сектор передатчика. Таким образом, символ OFDM, который несет информацию, идентифицирующую источник передачи пилот-символа, также несет информацию о помехах, соответствующую другим секторам в некоторых, но не обязательно во всех, вариантах. В одном примерном варианте информация о помехах передается значением множителя фазового сдвига, который был использован при создании пилот-символа.
Терминал доступа восстанавливает информацию о помехах из полученной преамбулы и управляет передачей сигнала на основе восстановленной информации о помехах. Некоторые примерные операции управления передачей сигналов в соответствии с восстановленной информацией о помехах включают в себя: отказ от передачи, настройку уровня мощности передачи и настройку скорости передачи данных.
Примерный способ функционирования устройства связи, например базовой станции или точки доступа, в соответствии с некоторыми вариантами содержит: измерение помех; и передачу преамбулы, причем указанная преамбула включает в себя множество пилот-символов, где, по меньшей мере, один из указанных пилот-символов включает в себя информацию о помехах. Примерное устройство беспроводной связи согласно некоторым вариантам содержит: модуль измерения помех; и модуль создания преамбулы для создания преамбулы, причем указанная преамбула включает в себя множество пилот-символов, где, по меньшей мере, один из указанных пилот-символов включает в себя информацию о помехах.
Примерный способ функционирования терминала доступа согласно некоторым вариантам содержит: прием преамбулы, причем указанная преамбула включает в себя множество пилот-символов, где, по меньшей мере, один из указанных пилот-символов включает в себя информацию о помехах; восстановление информации о помехах из принятой преамбулы; и управление передачей сигнала на основе восстановленной информации о помехах.
Примерный терминал доступа согласно нескольким вариантам содержит: модуль приемника для приема преамбулы, где преамбула включает в себя множество пилот-символов, причем, по меньшей мере, один из указанных пилот-символов включает в себя информацию о помехах; модуль восстановления информации о помехах для восстановления информации о помехах из принятой преамбулы; и модуль управления передачей для управления передачей сигналов на основе восстановленной информации о помехах.
Хотя в этом разделе были обсуждены различные варианты осуществления изобретения, следует понимать, что все варианты не обязательно должны включать одинаковые признаки и что некоторые из вышеописанных признаков не являются обязательными, но могут быть желательными в некоторых вариантах. В разделе «Осуществление изобретения», которое приведено ниже, обсуждаются многочисленные дополнительные признаки, варианты и преимущества изобретения.
Краткое описание чертежей
Фиг.1 - аспекты системы беспроводной связи с множественным доступом;
Фиг.2А и 2В - аспекты структур суперкадра для системы беспроводной связи с множественным доступом;
Фиг.3 - диаграмма, иллюстрирующая аспекты примерной преамбулы суперкадра для примерной системы беспроводной связи;
Фиг.4 - аспекты структур кадра для системы беспроводной связи с множественным доступом;
Фиг.5А - аспекты кадра прямой линии связи для системы беспроводной связи с множественным доступом;
Фиг.5В - аспекты кадра обратной линии связи для системы беспроводной связи с множественным доступом;
Фиг.6 - аспекты первого и второго устройств связи в системе беспроводной связи с множественным доступом;
Фиг.7 - диаграмма, иллюстрирующая аспекты примерной преамбулы суперкадра для примерной системы беспроводной связи;
Фиг.8 - блок-схема алгоритма примерного способа функционирования устройства связи, например точки доступа или базовой станции, согласно различным вариантам;
Фиг.9 - блок-схема алгоритма примерного способа функционирования терминала доступа согласно различным вариантам;
Фиг.10 - схема примерного устройства беспроводной связи, например точки доступа или базовой станции, согласно различным вариантам;
Фиг.11 - схема примерного терминала доступа согласно различным вариантам;
Фиг.12 - схема, иллюстрирующая различные примерные пилот-символы, используемые для пересылки информации о помехах согласно одному подходу, используемому в некоторых вариантах;
Фиг.13 - схема, иллюстрирующая различные примерные пилот-символы, используемые для пересылки информации о помехах согласно другому подходу, используемому в некоторых вариантах.
Осуществление изобретения
Далее различные варианты осуществления изобретения описываются со ссылками на чертежи, где для ссылок на одинаковые элементы везде используются одинаковые ссылочные позиции. В последующем в целях объяснения многочисленные конкретные детали описываются для того, чтобы обеспечить полное понимание одного или нескольких вариантов изобретения. Однако очевидно, что такой вариант (варианты) может быть практически реализован и без этих конкретных деталей. В других примерах хорошо известные структуры и устройства показаны в виде блок-схем, чтобы облегчить описание одного или нескольких вариантов.
Обратимся к Фиг.1, где показана система 100 беспроводной связи с множественным доступом согласно одному варианту. Система 100 беспроводной связи с множественным доступом включает в себя множество сот, например соты 102, 104 и 106. В варианте по Фиг.1 каждая сота (102, 104 и 106) может включать в себя точку (162, 164, 166) доступа соответственно, которая содержит множество секторов. Например, сота 102 включает в себя первый сектор 102а, второй сектор 102b и третий сектор 102с. Множество секторов сформировано в группы антенн, каждая из которых отвечает за связь с терминалами доступа в участке соты. В соте 102 каждая из антенных групп 112, 114 и 116 соответствует разному сектору. В соте 104 каждая из антенных групп 118, 120 и 122 соответствует разному сектору. В соте 106 каждая из антенных групп 124, 126 и 128 соответствует разному сектору.
Каждая сота включает в себя несколько терминалов доступа, которые находятся на связи с одним или несколькими секторами каждой точки доступа. Например, терминалы 130, 132, 134, 136 и 138 доступа находятся на связи с точкой 162 доступа; терминалы 140, 142, 144, 146 и 148 и 134 доступа находятся на связи с точкой 164 доступа; и терминалы 136, 148, 150, 152 и 154 и 156 доступа находятся на связи с точкой 166 доступа.
Контроллер 180 подсоединен к каждой из сот 102, 104 и 106. Контроллер 180 может содержать одно или несколько соединений с множеством сетей, например Интернет, другие сети на пакетной основе или голосовые сети с переключением каналов, которые передают информацию на терминалы доступа и получают от них информацию, находясь на связи с сотами системы 100 беспроводной связи с множественным доступом. Контроллер 180 включает в себя (или соединен с) планировщик, который планирует передачу от и к терминалам доступа. В других вариантах планировщик может находиться в каждой отдельной соте, каждом секторе соты или их комбинации.
Каждый из секторов может функционировать, используя одну или несколько из множества несущих. Каждая несущая составляет часть более широкой полосы пропускания, в которой может работать система, или которая доступна для связи. Один сектор, использующий одну или несколько несущих, может иметь множество терминалов доступа, запланированных на каждой из различных несущих в течение любого заданного временного интервала, например кадра или суперкадра. Кроме того, может быть запланирована одновременная работа одного или нескольких терминалов доступа на множестве несущих.
Терминал доступа может быть запланирован для работы на одной несущей или нескольких несущих в соответствии с его возможностями. Эти возможности могут составлять часть информации о сеансе, которая создается, когда терминал доступа пытается установить связь, либо которая была согласована ранее, может являться частью идентифицирующей информации, которая передается терминалом доступа, либо может быть установлена согласно любому другому подходу. Согласно некоторым аспектам информация о сеансе может содержать идентификационный маркер сеанса, который создается путем запроса терминала доступа или определения его возможностей через его передачи.
Используемая здесь точка доступа может представлять собой стационарную станцию, используемую для связи с терминалами, и может также называться базовой станцией, узлом В или некоторым другим термином, и включать в себя некоторые или все их функциональные возможности. Терминал доступа может также называться пользовательским оборудованием (UE), устройством беспроводной связи, терминалом, беспроводным терминалом, мобильной станцией, мобильным узлом, мобильным блоком или каким-либо другим термином, и включать в себя некоторые или все их функциональные возможности.
Следует заметить, что, хотя на Фиг.1 показаны физические секторы, то есть секторы, имеющие разные антенные группы для разных секторов, могут быть использованы и другие подходы. Например, вместо или в сочетании с физическими секторами можно использовать множество фиксированных «лучей», каждый из которых покрывает свою зону соты в частотной области.
Обратимся к Фиг.2А и 2В, где показаны аспекты структур суперкадра для системы беспроводной связи с множественным доступом. На Фиг.2А показаны аспекты структур суперкадра для системы дуплексной беспроводной связи с множественным доступом и частотным разделением каналов (FDD), в то время как на Фиг.2В показаны аспекты структур суперкадра для системы дуплексной беспроводной связи с множественным доступом и временным разделением каналов (TDD). Преамбула суперкадра передается в начале каждого суперкадра, или может быть рассредоточена внутри самого суперкадра, например, в его начальной и средней части.
На Фиг.2А и 2В передача по прямой линии связи разделена на блоки из суперкадров. Суперкадр может содержать преамбулу суперкадра, за которой следует ряд кадров. В системе FDD передача по обратной линии связи и по прямой линии связи может занимать разные частотные полосы, так что передачи по этим линиям связи не перекрываются или в большей своей части не перекрываются на любых поднесущих. В системе TDD N кадров прямой лини связи и M кадров обратной линии связи определяют количество последовательных кадров прямой линии связи и обратной линии связи, которое может непрерывно передаваться до разрешения передачи кадров противоположного типа. Следует заметить, что числа N и M могут изменяться в данном суперкадре или между суперкадрами.
Схема 200 на Фиг.2А иллюстрирует примерный суперкадр 201 прямой линии связи, который включает в себя преамбулу 202 суперкадра, за которой следуют кадры (204, 206, 208, 210, 212, 214, 216, 218, 220, 222, 224, 226, 228, 230, 232, 234, 236, 238, 240, 242, 244, 246, 248 и 250). На этом чертеже показано, что начальная часть другого суперкадра прямой линии связи включает в себя преамбулу 202' суперкадра, за которой следует кадр 204'. Примерный кадр, например кадр 218, в примерном режиме скачкообразной блочной перестройки включает в себя участок 252 данных, участок 254 управления, участок 256 пилот-сигнала и участок 258 общего пилот-сигнала. Примерный кадр, например кадр 218, в примерном режиме скачкообразной перестройки скорости передачи символов включает в себя участок 260 данных, участок 262 управления, участок 264 пилот-сигнала и участок 266 общего пилот-сигнала.
Схема 270 по Фиг.2В иллюстрирует примерный суперкадр 271 прямой линии связи, который включает в себя преамбулу 272 суперкадра, за которой следует последовательность кадров, используемая для сигнализации по прямой линии связи и временные интервалы заглушения сигнала, зарезервированные для кадров обратной линии связи (кадр 274, временной интервал 276 заглушения сигнала, кадр 278, временной интервал 280 заглушения сигнала, кадр 282, временной интервал 284 заглушения сигнала, кадр 286, временной интервал 288 заглушения сигнала, кадр 290, временной интервал 292 заглушения сигнала, кадр 294, временной интервал 296 заглушения сигнала, …, кадр 298, временной интервал 299 заглушения сигнала). На схеме показано, что начальный участок другого суперкадра прямой линии связи включает в себя преамбулу 272' суперкадра, за которой следует кадр 274'. Примерный кадр, например кадр 286, в примерном режиме скачкообразной блочной перестройки включает в себя участок 275 данных, участок 277 управления, участок 279 пилот-сигнала и участок 281 общего пилот-сигнала. Примерный кадр, например кадр 286 в примерном режиме скачкообразной перестройки скорости передачи символов включает в себя участок 283 данных, участок 285 управления, участок 287 пилот-сигнала и участок 289 общего пилот-сигнала.
Как в системе FDD, так и в системе TDD каждый суперкадр может содержать преамбулу суперкадра. В некоторых вариантах преамбула суперкадра включает в себя канал пилот-сигнала, содержащий пилот-сигналы, которые можно использовать для оценки каналов терминалами доступа, и канал широковещания, включающий в себя информацию о конфигурации, которую может использовать терминал доступа для демодуляции информации, содержащейся в кадре прямой линии связи. Кроме того, в преамбулу суперкадра также может быть включена информация о захвате, такая как временные характеристики, и другая информация, достаточная для того, чтобы терминал доступа мог осуществлять связь, и информация для управления базовой мощностью, либо в преамбулу суперкадра может быть также включена информация о сдвиге. В других случаях в преамбулу суперкадра может быть включена только часть из вышеперечисленной информации и/или иная информация.
Согласно одному аспекту в преамбулу суперкадра может быть включена следующая информация: (i) канал общего пилот-сигнала; (ii) канал широковещания, в том числе системная информация и информация о конфигурации; (iii) канал пилот-сигнала захвата, используемый для захвата временных характеристик и другой информации; и (iv) канал помех от других секторов, в том числе индикаторы от сектора с измеренными помехами по отношению к другим секторам.
Кроме того, согласно некоторым аспектам сообщения для каналов в преамбуле суперкадра могут занимать множество преамбул разных суперкадров. Это можно использовать для улучшения возможности декодирования путем распределения большего объема ресурсов для некоторых сообщений с высоким приоритетом.
Как показано на Фиг.2А и 2В, за преамбулой суперкадра следует последовательность кадров. Каждый кадр может включать в себя одинаковое или разное количество символов OFDM, которые могут образовать несколько поднесущих, которые можно одновременно использовать для передачи на некотором заданном периоде времени. Кроме того, каждый кадр может действовать в соответствии с режимом скачкообразной перестройки скорости передачи символов, где пользователю на прямой линии связи или обратной линии связи присваивается один или несколько несмежных символов OFDM, или в соответствии с режимом скачкообразной блочной перестройки, где пользователи перестраиваются внутри блока символов OFDM. Действительные блоки или символы OFDM могут перескакивать, а могут и не перескакивать с кадра на кадр.
На Фиг.3 представлена диаграмма 300 зависимости частоты от времени, которая иллюстрирует аспекты примерной преамбулы 301 суперкадра для системы беспроводной связи. Полоса пропускания, покрываемая преамбулой суперкадра, согласно одному или нескольким аспектам может составлять 1,25 МГц. Согласно другим аспектам, она может составлять 2,5 МГц, 5 МГц или какое-либо другое значение.
На Фиг.3 преамбула 301 суперкадра несет в себе первый служебный канал, содержащий первый участок 302 символа OFDM, и второй служебный канал, содержащий второй участок 304 указанного символа OFDM, а также символы 306, 308, 310, 312 и 314 OFDM. Первый служебный канал несет статические параметры общего применения, например длительность циклического префикса, количество защитных поднесущих и индекс суперкадра. Согласно одному аспекту первый служебный канал используется для начального инициирования. Согласно дополнительным аспектам первый служебный канал может кодироваться на множестве суперкадров, например 16 суперкадрах.
Второй служебный канал несет информацию, достаточную для того, чтобы разрешить терминалу доступа демодуляцию информации прямой линии связи, например, передачи данных, содержащихся в кадрах прямой линии связи. Согласно другим аспектам второй служебный канал может включать в себя информацию, относящуюся к схемам скачкообразной перестройки, структуре пилот-сигнала, структуре канала управления, передающих антенн и т.д. Согласно некоторым аспектам второй служебный канал может передаваться в любом альтернативном суперкадре, причем суперкадры не включают в себя второй служебный канал, используемый для пересылки сообщений пейджинговой связи. Согласно другим аспектам второй служебный канал может нести информацию о схемах скачкообразной перестройки обратной линии связи, отображении каналов, мощностях передачи, параметрах управления мощностью, параметрах доступа и т.д.
Предоставляя вышеуказанную информацию в первом и втором служебных каналах, система способна выполнять динамическую конфигурацию циклического префикса, количества антенн и структуры пилот-сигналов. Кроме того, это позволяет поддерживать каналы управления прямой линии связи и обратной линии связи с гибкими служебными издержками, которые могут соответствовать текущей нагрузке.
Согласно одному аспекту преамбула суперкадра может использовать три пилот-сигнала захвата. На Фиг.3 показано только два пилот-сигнала: TDM1 316 и TDM2 318. Согласно некоторым аспектам TDM1 316 представляет собой периодическую PN-последовательность с четырьмя периодами, где каждый четвертый тональный сигнал занимает некоторую частотную область. Согласно конкретному аспекту каждый сектор терминала доступа передает одинаковую последовательность для TDM1 316.
Согласно одному аспекту TDM2 318 скремблируется последовательностью во временной области, зависящей от сектора. Согласно некоторым аспектам последовательности во временной области могут иметь низкое отношение пиковой мощности к средней мощности (PAR) и допускают повышение мощности применительно к сигналам трафика, если это необходимо. Согласно ряду аспектов эти последовательности выбираются с помощью псевдошумового (PN) скремблирования так, чтобы они представляли собой последовательности Уолша. Согласно определенным аспектам последовательности Уолша коррелируются в приемнике с использованием быстрого преобразования Адамара. Согласно ряду других аспектов для используемых 512 различных идентификаторов секторов может быть использовано 512 последовательностей Уолша.
Согласно ряду аспектов одну или несколько поднесущих TDM2 318 можно использовать для пересылки указателей о помехах от других секторов. Например, для выдачи команд на изменение мощности терминалом доступа можно использовать один или несколько бит информации.
Согласно некоторым аспектам пилот-сигналы TDM1 316 и TDM2 318 можно использовать в ситуациях, когда секторы синхронизированы или фактически синхронизированы, либо когда секторы работают асинхронно. В случае синхронных или фактически синхронных систем пилот-сигналы могут изменяться от одного суперкадра к другому. Кроме того, разные секторы могут использовать сдвиги одной и той же последовательности для дополнительного улучшения способности различать пилот-сигналы разных секторов. Кроме того, для реализации этого не требуется синхронизация на уровне символа/элементарной посылки. Согласно этим аспектам в асинхронных системах пилот-сигналы могут быть одинаковыми в разных суперкадрах, и синхронизация между секторами не требуется.
Для выхода за пределы преамбулы суперкадра можно добавить третий пилот-сигнал. Следует заметить, что местоположение поднесущих и символов первого служебного канала, второго служебного канала и пилот-сигналов может изменяться и не обязательно будет точно таким, как показано на Фиг.3. Кроме того, хотя здесь показано, что каждый канал, отличный от первого служебного канала, занимает весь символ OFDM, это не является обязательным, и на данном символе OFDM можно использовать не все поднесущие.
Обратимся к Фиг.4, иллюстрирующей аспекты канальной структуры для системы беспроводной связи с множественным доступом. Полоса 400 пропускания, которая может представлять собой виртуальную полосу пропускания, содержащую множество прерывистых участков, доступна для связи согласно проектным системным параметрам. Данная структура включает в себя один или несколько кадров 404 прямой линии связи и кадров 408 обратной линии связи, каждый из которых может являться частью одного или нескольких суперкадров, как обсуждалось применительно к Фиг.2А и/или Фиг.2В.
Каждый кадр 404 прямой линии связи включает в себя каналы 406 управления. Каждый из каналов 406 управления может включать в себя информацию для функций, относящихся, например, к: захвату; подтверждениям; вариантам распределения прямой линии связи для каждого терминала доступа, которые могут отличаться или совпадать для сообщений широковещательного, группового и одноадресного типа; вариантам распределения обратной линии связи для каждого терминала доступа; управлению мощностью обратной линии связи для каждого терминала доступа; и подтверждениям обратной линии связи. Следует отметить, что в каналах 406 управления может поддерживаться большее или меньшее количество указанных функций. Также каналы 406 управления могут скачкообразно перестраиваться в каждом кадре согласно последовательностям скачкообразной перестройки, которые совпадают или отличаются от последовательностей скачкообразной перестройки, закрепленных за каналами данных.
Каждый кадр 408 обратной линии связи включает в себя несколько передач обратной линии связи, например, 412, 414 и 416, от терминалов доступа. На Фиг.4 передача по обратной линии связи показана в виде блока, то есть группы смежных символов OFDM. Следует заметить, что также может быть использована скачкообразная перестройка скорости передачи символов, например не смежных блоков символов.
Вдобавок, каждый кадр 408 обратной линии связи может включать в себя один или несколько каналов 440 управления обратной линии связи, которые могут содержать: каналы обратной связи; каналы пилот-сигналов для оценки каналов обратной линии связи, и каналы подтверждений, которые могут содержаться в передаче 412, 414, 416 по обратной линии связи. Каждый из каналов 440 управления обратной линии связи может включать в себя информацию для функций, относящихся, например, к: запросам на ресурсы прямой линии связи и обратной линии связи со стороны каждого терминала доступа; информации о канале, например информации о качестве канала (CQI) для различных типов передачи; и к пилот-сигналам от терминалов доступа, которые могут использоваться точкой доступа в целях оценки канала. Следует заметить, что в каналах 440 управления может поддерживаться большее или меньшее число указанных функций. Также каналы 440 управления обратной линии связи могут скачкообразно перестраиваться в каждом кадре согласно последовательностям скачкообразной перестройки, которые могут совпадать или отличаться от последовательностей скачкообразной перестройки, закрепленных за каналами данных.
Согласно некоторым аспектам для мультиплексирования пользователей по каналам 440 управления обратной линии связи можно использовать один или несколько ортогональных кодов, последовательностей скремблирования или т.п. для выделения каждого пользователя и/или информации различных типов, передаваемой по каналам 440 управления обратной линии связи. Эти ортогональные коды могут быть привязаны каждый к конкретному пользователю или могут распределяться точкой доступа для каждого терминала доступа на один сеанс связи или более короткий период, например на один суперкадр.
Вдобавок, согласно определенным аспектам некоторые из доступных поднесущих в символе OFDM могут быть предусмотрены в качестве защитных поднесущих, которые могут не модулироваться, то есть на этих поднесущих энергия не передается. Количество защитных поднесущих в преамбуле суперкадра и в каждом кадре может быть указано посредством одного или нескольких сообщений в каналах 406 управления или преамбуле суперкадра.
Кроме того, согласно некоторым аспектам для уменьшения объема служебных передач на конкретный терминал пакет может быть закодирован совокупно для этого терминала доступа, если даже символы пакетов должны передаваться на поднесущих. Таким путем для указанного пакета может быть использована одна циклическая проверка избыточности, а для передач, которые включают в себя символы из этих пакетов, не потребуются служебные передачи циклических проверок избыточности.
Следует заметить, что полоса 400 пропускания не обязательно должна содержать смежные поднесущие; они могут быть прерывистыми. Согласно указанным аспектам каналы управления могут быть не на всех участках несущей, случайно распределены среди этих участков или запланированы на этих участках каким-либо детерминированным образом.
Обратимся к Фиг.5А, иллюстрирующей аспекты кадра прямой линии связи для системы беспроводной связи с множественным доступом. Как показано на Фиг.5А, каждый кадр 404 прямой линии связи дополнительно делится на два сегмента. Первый сегмент, являющийся каналом 406 управления, который может содержать, а может и не содержать непрерывную группу поднесущих, имеет переменное количество поднесущих, присваиваемых в зависимости от желаемого объема данных управления и по другим соображениям. Остальные участки 422 обычно доступны для передачи данных. Канал 406 управления может включать в себя один или несколько каналов 512 и 514 пилот-сигналов. В режиме скачкообразной перестройки скорости передачи символов каналы пилот-сигналов могут быть представлены в каждом из символов OFDM в каждом кадре прямой линии связи, и в этих случаях они не обязательно входят в канал 406 управления. В обоих случаях в канале 406 управления могут быть представлены канал 516 сигнализации и канал 518 управления мощностью, как показано на Фиг.5А. Канал 516 сигнализации может включать в себя вариант присваивания ресурсов, подтверждение и/или эталоны мощности и настройки для передач данных, управляющих команд и пилот-сигналов по обратной линии связи.
Канал 518 управления мощностью может нести информацию, относящуюся к помехам, созданным в других секторах из-за передач от терминалов доступа данного сектора. Также согласно определенным аспектам поднесущие 420, находящиеся на краю всей полосы пропускания, могут выполнять функцию квазизащитных поднесущих.
Следует отметить, что, когда для передачи из сектора используется множество передающих антенн, разные передающие антенны должны иметь одинаковые временные характеристики суперкадра (в том числе индекс суперкадра), характеристики символа OFDM и последовательности скачкообразной перестройки.
Следует отметить, что согласно некоторым аспектам каналы 512, 514, 516, 518 канала 406 управления могут содержать такие же распределения, как и при передачи данных, например, если при передачах данных выполняется скачкообразная блочная перестройка, то тогда для канала 406 управления могут распределяться блоки одинакового или разных размеров.
Обратимся к Фиг.5В, иллюстрирующей аспекты кадра обратной линии связи для системы беспроводной связи с множественным доступом. Канал 522 пилот-сигнала может включать в себя пилот-сигналы, позволяющие точке доступа осуществлять оценку обратной линии связи. Канал 524 запроса может включать в себя информацию, позволяющую терминалу доступа запрашивать ресурсы для следующих кадров обратной линии связи и прямой линии связи.
Канал 526 обратной связи для обратной линии связи позволяет терминалам доступа обеспечить обратную связь в отношении канальной информации CQI. Информация CQI может относиться к одному или нескольким запланированным режимам или режимам, доступным для планирования, для передачи на терминал доступа. Примерные режимы могут включать в себя формирование диаграммы направленности, множественный доступ с пространственным разделением каналов (SDMA), предварительное кодирование или их комбинации. Канал 528 управления мощностью может быть использован в качестве эталона, позволяющего точке доступа создавать команды управления мощностью для передачи по обратной линии связи, например, передачи данных терминалом доступа. Согласно некоторым аспектам канал 528 управления мощностью может содержать один или несколько каналов 526 обратной связи. Каналы 432 данных могут действовать согласно режиму скачкообразной перестройки скорости передачи символов или скачкообразной блочной перестройки в различных кадрах 408 обратной линии связи. Также, согласно определенным аспектам поднесущие 480 на краю всей полосы пропускания могут выполнять функцию квазизащитных поднесущих.
Следует отметить, что, хотя на Фиг.5А и 5В изображены разные каналы, которые образуют каналы 406 и 440 управления с временным мультиплексированием, это не является обязательным. Могут быть мультиплексированы различные каналы, образующие каналы 406 и 440 управления, с использованием других ортогональных, квазиортогональных или скремблирующих кодов, других частот или любых комбинаций временных параметров, кодов и частот.
Обратимся к Фиг.6, где показана блок-схема варианта примерного первого устройства или системы 810 связи и примерного второго устройства или системы 850 связи в системе 800 MIMO. В первом устройстве 810 связи данные трафика для нескольких потоков данных подаются из источника 812 данных в процессор 814 данных передачи (TX). В одном варианте каждый поток данных передается через соответствующую передающую антенну. Процессор 814 данных TX форматирует, кодирует и выполняет перемежение данных трафика для каждого потока данных на основе конкретной схемы кодирования, выбранной для этого потока данных, чтобы получить кодированные данные.
Кодированные данные для каждого потока данных могут быть мультиплексированы с данными пилот-сигналов с использованием технологии OFDM. Данные пилот-сигналов, как правило, представляют собой известную конфигурацию данных, которая обрабатывается известным способом и может быть использована в системе приемника для оценки канальной характеристики. Затем мультиплексированные пилот-сигналы и кодированные данные для каждого потока данных модулируются (то есть выполняется символьное отображение) на основе конкретной схемы модуляции (например, BPSK, QSPK, M-PSK или M-QAM), выбранной для этого потока данных, чтобы обеспечить символы модуляции. Скорость передачи данных, схемы кодирования и модуляции для каждого потока данных могут быть определены командами, выполняемыми процессором 830.
Затем символы модуляции для каждого из потоков данных подаются в процессор 820 TX, который может подвергнуть эти символы модуляции дополнительной обработке (например, по схеме OFDM). Затем процессор 820 TX подает NT потоков символов модуляции на NT передатчиков (TMTR с 822а по 822t). Каждый передатчик 822 получает и обрабатывает соответствующий поток символов, обеспечивая один или несколько аналоговых сигналов, и выполняет дополнительную нормализацию (например, усиление, фильтрация и преобразование с повышением частоты) этих аналоговых сигналов, обеспечивая модулированный сигнал, подходящий для передачи по каналу MIMO. Затем NT модулированных сигналов от передатчиков с 822а по 822t передаются с NT антенн с 824а по 824t соответственно.
Во втором устройстве 850 связи переданные модулированные сигналы принимаются NR антеннами с 852а по 852r, и полученный сигнал от каждой антенны 852 подается в соответствующий приемник (RCVR) 854. Каждый приемник 854 (854а-854r) нормализует (например, фильтрует, усиливает и преобразует с понижением частоты) соответствующий принятый сигнал, оцифровывает нормализованный сигнал, обеспечивая его отсчеты, и выполняет дополнительную обработку этих отсчетов, чтобы получить соответствующий «принятый» поток символов.
Затем процессор 860 данных RX получает и обрабатывает NR принятых потоков символов от NR приемников 854 на основе конкретной технологии обработки в приемнике, обеспечивая NT «обнаруженных» потоков символов. Обработка, выполняемая процессором 860 данных RX, подробно описана ниже. Каждый обнаруженный поток символов включает в себя символы, являющиеся оценками символов модуляции, переданных для соответствующего потока данных. Затем процессор 860 данных RX выполняет демодуляцию, обратное перемежение и декодирование каждого обнаруженного потока символов для восстановления данных трафика для конкретного потока данных. Восстановленные данные запоминаются в приемнике 864 данных. Обработка, выполняемая процессором 860 данных RX, является дополнением к обработке, выполняемой процессором TX 820 и процессором 814 данных TX в первом устройстве 810 связи.
Процессор 860 данных RX может быть ограничен количеством поднесущих, которые могут одновременно демодулироваться, например 512 поднесущих или 5МГц, 128 поднесущих или 1,25 МГц, 256 поднесущих или 2,5 МГц.
Оценку канальной характеристики, созданную процессором RX 860, можно использовать для выполнения пространственной, пространственно/временной обработки в приемнике, настройки уровней мощности, изменения частоты или схемы модуляции или других действий. Процессор RX 860 может, кроме того, оценить отношения «сигнал - шум плюс помехи» (SNR) для обнаруженных потоков символов и возможно другие канальные характеристики, и подать соответствующие величины в процессор 870. Процессор 860 данных RX или процессор 870 может, кроме того, получить оценку «рабочего» SNR для системы. Затем процессор 870 обеспечивает информацию о состоянии каналов (CSI), которая может содержать информацию различных типов, относящуюся к линии связи и/или принятому потоку данных. Например, информация CSI может содержать рабочий SNR. Затем информация CSI обрабатывается процессором 818 данных TX, модулируется модулятором 880, нормализуется передатчиками с 854а по 854r и передается обратно в первое устройство 810 связи. Дополнительные данные от источника 816 данных, в том числе, например, трафик обратной линии связи, иногда принимаются процессором 818 данных TX, модулируются модулятором 880, нормализуются передатчиками с 854а по 854r и передаются на первое устройство 810 связи.
В первом устройстве 810 связи модулированные сигналы от второго устройства 850 связи принимаются антеннами 824, нормализуются приемниками 822, демодулируются демодулятором 840 и обрабатываются процессором 842 данных RX для восстановления информации CSI, переданной системой приемника. Затем полученная информация CSI поступает в процессор 830 и используется для: (1) определения скоростей передачи данных и схем кодирования и модуляции, которые должны использоваться для потоков данных, и (2) создания различных управляющих воздействий для процессора 814 данных TX и процессора TX 820. В альтернативном варианте информация CSI наряду с другой информацией может быть использована процессором 870 для определения схем модуляции и/или скоростей кодирования для передачи. Затем эта информация, которая может быть квантована, может быть предоставлена передатчику первого устройства связи, который использует ее для обеспечения дальнейших передач на приемник второго устройства связи. Данные, восстановленные процессором 842 данных RX, иногда могут запоминаться в приемнике 844 данных. Восстановленные данные иногда могут включать данные трафика обратной линии связи.
Процессоры 830 и 870 управляют работой первого и второго устройств связи соответственно. Запоминающие устройства 832 и 872 обеспечивают хранение программных кодов и данных, используемых процессорами 830 и 870 соответственно.
В приемнике для обработки NR принятых сигналов для обнаружения NT переданных потоков символов могут быть использованы различные способы обработки. Эти способы обработки в приемнике можно сгруппировать по двум основным категориям: (i) пространственные и пространственно-временные способы обработки в приемнике (которые также называют способами выравнивания); и (ii) способ обработки в приемнике, называемый «последовательное обнуление/выравнивание с подавлением помех», который также называют «последовательное подавление помех» или «последовательное подавление»).
Хотя Фиг.6 иллюстрирует систему MIMO, этот же подход может быть применен к системе типа «множество входов - один выход», где множество передающих антенн, например антенны, находящиеся на базовой станции, передают один или несколько потоков символов на устройство с одной антенной, например на мобильную станцию. Также аналогичным образом, описанным в связи с Фиг.6, можно использовать антенную систему типа «один выход - один вход».
Описанные здесь способы передачи можно реализовать различными средствами. Например, эти способы могут быть реализованы аппаратными средствами, аппаратно-программными средствами, программными средствами или их комбинацией. При аппаратной реализации блоки обработки в первом устройстве связи могут быть реализованы в рамках одной или нескольких прикладных специализированных интегральных схем (ASIC), цифровых процессорах сигналов (DSP), цифровых устройствах обработки сигналов (DSPD), программируемых логических устройствах (PLD), вентильных матрицах, программируемых пользователем (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных блоках, разработанных для выполнения описанных здесь функций, или их комбинациях. Блоки обработки во втором устройстве связи также могут быть реализованы в рамках одной или нескольких ASIC, процессорах, DSP и т.д.
При программной реализации способы передачи можно реализовать с помощью модулей (например, процедуры, функции и т.д.), которые выполняют описанные здесь функции. Программные коды могут храниться в памяти (например, память 832 или 872 на Фиг.6) и выполняться процессором (например, процессором 830 или 879). Память может быть реализована в процессоре или вне процессора.
Следует отметить, что принятая здесь концепция каналов относится к типам информации или передачи, которые могут передаваться точкой доступа или терминалом доступа. Это не требует использования фиксированных или заранее определенных блоков поднесущих, временных интервалов или иных ресурсов, выделенных для указанных передач.
В некоторых примерных вариантах каждый суперкадр FL включает в себя преамбулу суперкадра, за которой следует последовательность кадров FL (смотри Фиг.2А и 2В). На Фиг.7 показана диаграмма 700, иллюстрирующая зависимость частоты по вертикальной оси 702 от индекса символа OFDM по горизонтальной оси 704. Причем эта диаграмма включает в себя приведенную в качестве примера преамбулу 706 суперкадра. Преамбула 706 суперкадра содержит 8 символов (708, 710, 712, 714, 716, 718, 720, 722) OFDM для размерности FFT, составляющей 512 и выше. Эти символы, как показано на Фиг.7, имеют индексы от 0 до 7.
В некоторых вариантах примерная преамбула суперкадра содержит 16 символов OFDM в случае 256-точечного преобразования FFT. Другая примерная преамбула суперкадра содержит 32 символа OFDM в случае 128-точечного преобразования FFT. Для простоты в последующем описании размерность FFT составляет 512 и выше. В других случаях каждый составляющий канал преамбулы суперкадра масштабируется (повторяется во времени) с помощью соответствующего коэффициента (коэффициент 2 в случае 256-точечного преобразования FFT и коэффициент 4 в случае 128-точечного преобразования FFT) в отличие от случая 512-точечного преобразования FFT.
Последние три символа OFDM (718, 720, 722) в преамбуле 706 суперкадра (символы с индексами 5, 6 и 7) являются пилот-сигналами TDM, которые используют для начального захвата. Эти символы можно также обозначить, как пилот-сигнал 1 TDM, пилот-сигнал 2 TDM и пилот-сигнал 3 TDM. Первый из них формирует канал захвата (F-ACQCH), в то время как два последние многократно используются для передачи канала помех от других секторов (F-OSICH). Пилот-сигнал 1 TDM передается в символе OFDM (722), в то время как пилот-сигналы 2 и 3 TDM передаются в символах OFDM 5 и 6 (718, 720) соответственно.
Далее описывается примерный пилот-сигнал 1 TDM. Пилот-сигнал 1 TDM является символом OFDM, который содержит PN последовательность во временной области с четырьмя периодами. Структура пилот-сигнала 1 TDM зависит от того, меньше или больше полоса пропускания 5 МГц.
В случае, когда полоса пропускания составляет 5 МГц или менее, указанный символ OFDM строится путем выполнения преобразования FFT для PN последовательности длиной NFFT/4 и заполнения каждой четвертой поднесущей (включая защитные поднесущие) значениями FFT. За этим следует преобразование IFFT и добавление циклического префикса и интервалов кадрирования, как в каждом из других символов OFDM. Используемая с этой целью PN последовательность не зависит от сектора, вследствие чего невозможно идентифицировать секторы путем использования пилот-сигнала 1 TDM. Однако PN последовательность зависит от полосы пропускания. Другая PN последовательность используется в каждом из следующих трех случаев: BWЈ1,25 МГц; 1,25 МГц<BWЈ2,5 МГц; и 2,5 МГц<BWЈ5 МГц.
Если полоса пропускания больше 5 МГц, она разбивается на сегменты, которые имеют каждый полосу пропускания, равную 5 МГц. Сектор передает пилот-сигнал 1 TDM в одном сегменте в любом данном суперкадре. Однако сегмент, в котором сектор передает пилот-сигнал, меняется от одного суперкадра к другому. Сегмент выбирается по-разному в двух различных режимах синхронизации. Последовательность во временной области, используемая для модуляции, не зависит от сектора, а зависит от суммарной полосы пропускания и индекса сегмента.
Пилот-сигнал 1 TDM можно использовать для оценки временных характеристик суперкадра. Например, терминал AT может сопоставить форму принятого сигнала с известной PN последовательностью TDM и сравнить коррелированное значение с порогом, чтобы определить, присутствует ли пилот-сигнал 1 TDM в любом заданном периоде времени. Как только временные характеристики идентифицированы, терминал AT может перейти к идентификации сектора, используя пилот-сигналы 2 и 3 TDM. Пилот-сигнал 1 TDM можно также использовать для коррекции частоты.
Далее описываются примерные пилот-сигналы 2 и 3 TDM. Пилот-сигналы 2 и 3 TDM используют для идентификации сектора после захвата одного или нескольких сильных трактов с использованием пилот-сигнала 1 TDM. Пилот-сигналы 2 и 3 TDM формируют с использованием последовательности во временной области, которая входит в набор из 1024 последовательностей Уолша, скремблированных PN последовательностью. Первые 512 элементов последовательности Уолша используют для построения пилот-сигнала 2 TDM, а последние 512 элементов для построения пилот-сигнала 3 TDM. Последовательность Уолша зависит от PilotPN сектора и не изменяется от одного суперкадра к другому. Из 1024 последовательностей 512 последовательностей резервируют для полусинхронного режима, а другие 512 последовательностей резервируют для асинхронного режима. PN последовательность зависит от полосы пропускания системы в случае варианта с полосой пропускания Ј 5 МГц и зависит от полосы пропускания и индекса сегмента в случае варианта с полосой пропускания > 5 МГц. Сегменты, в которых передаются пилот-сигналы 2 и 3 TDM идентичны сегменту, в котором передается пилот-сигнал 1 TDM.
Далее описываются режимы синхронизации. Система поддерживает два режима, а именно полусинхронный и асинхронный, и пилот-сигналы TDM формируются по-разному в этих двух случаях.
Ниже описывается полусинхронный режим. Для некоторых приложений, таких как масштабирование, полезно выявить особо слабые секторы. По этой причине возможно окажется важным разрешить корреляции для более чем одной преамбулы суперкадра. Чтобы получить выигрыш при обработке для более чем одной преамбулы суперкадра, выгодно, чтобы помехообразующий сигнал (то есть пилот-сигнал TDM соседнего сектора) изменялся от одной преамбулы суперкадра до следующей. Чтобы это получилось, для каждого сектора определяют вспомогательную величину, которая изменяется от одного суперкадра к другому и называется фазой пилот-сигнала (PilotPhase). PilotPhase имеет 9 бит и определяется как PilotPhase=(PilotPN+SuperframeIndex) mod 512, где SuperframeIndex - значение счетчика, возрастающее на единицу от одного суперкадра к следующему, и определяемое глобально для каждого из секторов. PilotPhase используется для создания последовательностей скремблирования для двух пилот-сигналов TDM. Кроме того, сегмент, в котором передаются пилот-сигналы TDM в варианте, когда BW > 5 МГц, выбирается псевдослучайным образом в функции PilotPhase. Структура пилот-сигнала имеет некоторый уровень синхронизации между двумя секторами, когда разные секторы используют сдвиги из одной и той же последовательности. Точнее, если PilotPN может принимать все возможные значения, то эта структура потребует, чтобы любые два сектора были синхронизированы с точностью до половины суперкадра, но не на уровне символа или элементарной посылки. В противном случае, потенциально возможно, чтобы два сектора с разными PilotPN могли передавать одновременно одни и те же пилот-сигналы захвата (одинаковые PN последовательности). Этот режим может иногда использоваться для улучшения рабочих характеристик (уменьшения времени захвата, быстрого переключения секторов, оценки помех и т.д.).
Далее описывается асинхронный режим. В некоторых ситуациях невозможно точно синхронизировать два сектора. Для поддержки таких сценариев в системе имеется режим, для которого не требуется синхронизация. В этом режиме пилот-сигналы TDM скремблируются непосредственно с использованием PilotPN вместо вспомогательной величины PilotPhase. Для систем с полосой пропускания Ј 5 МГц пилот-сигналы TDM одинаковы от одного суперкадра к другому. Для системы с полосой пропускания >5МГц пилот-сигналы TDM циклически повторяются в наборе доступных сегментов.
Далее описывается примерная процедура захвата. Первые пять символов (708, 710, 712, 714, 716) OFDM в преамбуле суперкадра используются для переноса двух основных широковещательных каналов, а именно F-pBCH0 и F-pBCH1. Первый символ 708 OFDM включает участок 724 F-pBCH0 и участок 726 F-pBCH1. Символы OFDM со второго по пятый (710, 712, 714, 716) несут информацию F-pBCH1. Эти каналы несут информацию о конфигурации, которую необходимо иметь терминалу AT, прежде чем он сможет демодулировать кадры PHY. Вдобавок, канал F-pBCH1 также несет пейджинговую информацию.
Пакет F-pBCH0 в этом примерном варианте кодируется по 16 суперкадрам и занимает 1/4 символа OFDM в каждой преамбуле суперкадра, что представляет собой весьма небольшие непроизводительные издержки. F-pBCH0 несет общие статические параметры, такие как длительность циклического префикса, количество защитных поднесущих, вдобавок к индексу суперкадра, которые требуются только при начальной активизации.
Пакет F-pBCH1 кодируется по одному суперкадру и занимает 4ѕ символа OFDM в каждой преамбуле суперкадра. Служебные издержки полосы пропускания этого канала составляют примерно 2%. F-pBCH1 несет достаточную информацию, позволяющую терминалу AT демодулировать данные прямой линии связи из кадров PHY, где указанная информация представляет собой информацию о схемах скачкообразной перестройки FL, структуре пилот-сигналов, структуре каналов управления, передающих антеннах и т.д. Эта информация передается в любом альтернативном суперкадре; другие кадры используются для переноса пейджинговых сообщений, например быстрых пейджинговых сообщений. Широковещательная передача остальной служебной информации осуществляется с использованием канала регулярных данных в заранее определенных суперкадрах, в которых переносится информация о схемах скачкообразной перестройки RL, канального отображения, мощностях передачи, параметрах управления мощностью, параметрах доступа и т.д.
Эти каналы позволяют обеспечить гибкий физический уровень, допускающий гибкую конфигурацию циклического префикса, количества антенн, структуры пилот-сигналов и т.д. Они могут также поддерживать каналы управления FL и RL при гибких служебных издержках, которые могут соответствовать текущим пользовательским нагрузкам. Также могут быть включены или отключены такие функции, как планирование субполос, FFR и т.д.
После начальной активизации терминал AT сначала обнаруживает сектор и обеспечивает временную и частотную синхронизацию, используя пилот-сигналы TDM. В полусинхронном режиме терминал AT узнает значение переменной PilotPhase в конце этого этапа, в то время как в асинхронном режиме терминал AT в конце этого этапа узнает значение PilotPN. Затем терминал AT переходит к демодуляции каналов F-pBCH0 и F-pBCH1. Канал F-pBCH0 несет 9 младших бит индекса SuperframeIndex, который позволяет терминалу AT найти значение PilotPN в случае полусинхронного режима (PilotPN=PilotPhase - SuperframeIndex mod 512). Таким образом, как в полусинхронном, так и в асинхронном режимах в конце этого этапа терминал AT узнает значения переменных PilotPN и SuperframeIndex, которые совместно использует в качестве начальных чисел для различных генераторов случайных чисел (для скачкообразной перестройки, скремблирования и т.д.), которые применяются при создании формы сигнала FL.
Канал помех от других секторов (F-OSICH) в одном варианте несет величину, имеющую три состояния, которая модулируется как фаза в пилот-сигналах TDM2 и 3. Поскольку форма пилот-сигнала TDM по завершении захвата становится известной, суперпозиция не вызывает ухудшения рабочих характеристик OSCIH. Одной из характеристик является характеристика, используемая терминалами AT в соседнем секторе, то есть необходимо иметь возможность декодирования при очень низких значениях SNR. Это обеспечивается путем предоставления весьма большого коэффициента расширения для этого канала, то есть весь символ OFDM используется для передачи менее двух бит информации, либо два символа OFDM используются для передачи двух бит информации.
На Фиг.8 представлена блок-схема алгоритма 900 примерного способа функционирования устройства связи, например точки доступа или базовой станции согласно различным вариантам осуществления изобретения. Работа начинается с этапа 902, где выполняется подключение устройства связи к источнику питания и инициализация, а затем происходит переход к этапу 904. На этапе 904 устройство связи измеряет помехи. После этапа 904 осуществляется переход к этапу 906.
На этапе 906 устройство связи создает преамбулу. Этап 906 включает в себя подэтапы 912 и 913. В некоторых вариантах этап 906 включает в себя подэтап 910, на котором устройство связи создает один или несколько символов OFDM, соответствующих одному или нескольким широковещательным каналам. От этапа 910 осуществляется переход к подэтапу 912. В других вариантах подэтап 910 не является частью этапа 906.
На подэтапе 912 устройство связи создает первый пилот-сигнал, по меньшей мере, на нескольких поднесущих первого пилот-символа OFDM. От подэтапа 912 выполняется переход к подэтапу 913. На подэтапе 913 устройство связи создает второй пилот-символ OFDM, включающий в себя информацию о помехах. Подэтап 913 включает в себя подэтап 914 и один или несколько подэтапов 922 и 923. На подэтапе 914 устройство связи создает второй пилот-сигнал, по меньшей мере, на нескольких поднесущих второго пилот-символа OFDM. В некоторых вариантах создание второго пилот-сигнала включает в себя использование последовательности скремблирования, которая применяется для первого пилот-сигнала. В некоторых вариантах создание второго пилот-сигнала включает в себя умножение последовательности скремблирования, используемой для создания второго пилот-сигнала, на сдвиг. В некоторых вариантах этот сдвиг зависит от информации о помехах. В ряде вариантов этот сдвиг имеет единичный модуль, например сдвиг имеет вид exp(j*theta).
В некоторых вариантах подэтап 914 включает в себя подэтапы 916, 918 и 920. На подэтапе 916 устройство связи определяет, находится ли оно в асинхронном режиме функционирования или в полусинхронном режиме. Если устройство связи находится в асинхронном режиме, то выполняется переход от подэтапа 916 к подэтапу 918, на котором устройство связи создает второй пилот-сигнал, по меньшей мере, на нескольких поднесущих второго пилот-символа OFDM согласно первой функции. Однако, если устройство связи работает в полусинхронном режиме, то тогда выполняется переход от подэтапа 916 к подэтапу 920, на котором устройство связи создает второй пилот-сигнал, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM согласно второй функции, отличной от указанной первой функции.
От подэтапа 914 выполняется переход к подэтапу 922 или альтернативному подэтапу 923. На подэтапе 922 устройство связи создает информацию о помехах, по меньшей мере, на ряде других поднесущих второго пилот-символа OFDM. В некоторых вариантах в преамбуле, по меньшей мере, два символа используют для передачи информации о помехах. На подэтапе 923 устройство связи включает информацию о помехах в указанный второй пилот-символ OFDM посредством фазового сдвига множества поднесущих. Например, в некоторых вариантах с разными уровнями помех, подлежащими передаче, связаны разные значения множителя фазового сдвига. В некоторых вариантах фазовый сдвиг применяется путем выполнения операции умножения фазы во входном символе, который не включает в себя информацию о помехах, для создания пилот-символа, включающего в себя информацию о помехах. Далее выполняется переход от этапа 906 к этапу 908.
На этапе 908 устройство связи передает созданную преамбулу, причем указанная преамбула включает в себя множество пилот-символов, где, по меньшей мере, один из указанных пилот-символов содержит информацию о помехах. В различных вариантах передача преамбулы, кроме того, включает в себя передачу, по меньшей мере, одного символа как части указанной преамбулы, соответствующего широковещательному каналу, который используется для передачи информации о конфигурации системы. В некоторых вариантах передача преамбулы включает в себя передачу созданного первого пилот-символа OFDM и созданного второго пилот-символа OFDM в виде соседних символов OFDM в указанной преамбуле. В некоторых вариантах указанный первый или указанный второй пилот-символ OFDM является последним символом OFDM в преамбуле. Далее выполняется переход от этапа 908 к этапу 904, где устройство связи измеряет информацию о помехах.
В некоторых вариантах пилот-символы в преамбуле включают в себя пилот-сигналы захвата, используемые, по меньшей мере, для одного из следующих действий: захват временных характеристик или/и идентификация сектора. В различных вариантах преамбула включает в себя больше символов, используемых для передачи информации о конфигурации системы, чем для передачи информации о помехах.
В некоторых вариантах символы в преамбуле суперкадра включают в себя одинаковое количество тональных сигналов на символ, как символы, используемые для передачи данных в виде части кадра в теле указанного суперкадра. В некоторых вариантах символы в преамбуле суперкадра включают в себя меньше тональных сигналов на символ, чем символы, используемые для передачи данных в виде части кадра в теле указанного суперкадра.
На Фиг.9 представлена блок-схема алгоритма примерного способа функционирования терминала доступа согласно различным вариантам осуществления изобретения. Функционирование начинается с этапа 1002, где терминал доступа подключается к источнику питания и инициализируется, а затем выполняется переход к этапу 1004. На этапе 1004 терминал доступа принимает преамбулу, причем указанная преамбула включает в себя множество пилот-символов, где, по меньшей мере, один из указанных пилот-символов включает в себя информацию о помехах. Полученная преамбула представляет собой, например, преамбулу суперкадра. В некоторых указанных вариантах символы в преамбуле суперкадра включают в себя одинаковое количество тональных сигналов на символ в качестве символов, используемых для передачи данных как части кадра в теле указанного суперкадра. В ряде других вариантов символы в преамбуле суперкадра включают в себя меньшее количество тональных сигналов на символ, чем символы, используемые для передачи данных как части кадра в теле указанного суперкадра. В некоторых вариантах полученная преамбула включает в себя больше символов, используемых для передачи информации о конфигурации системы, чем используемых для передачи информации о помехах. От этапа 1004 осуществляется переход к этапу 1006.
На этапе 1006 терминал доступа выполняет операцию захвата временных характеристик, используя, по меньшей мере, один из указанных пилот-символов, содержащихся в указанной преамбуле. Затем выполняется переход от этапа 1006 к этапу 1008. На этапе 1008 терминал доступа идентифицирует сектор, из которого была передана полученная преамбула, на основе, по меньшей мере, одного из указанных пилот-символов, включающих в себя информацию о помехах, которая содержится в полученной преамбуле. После этапа 1008 выполняется этап 1010.
На этапе 1010 терминал доступа восстанавливает информацию о помехах из полученной преамбулы. В некоторых вариантах используют, по меньшей мере, два символа в полученной преамбуле для передачи информации о помехах, а восстановление информации о помехах из полученной преамбулы включает в себя восстановление информации о помехах, по меньшей мере, из двух символов. В различных вариантах восстановление информации о помехах включает в себя выполнение операции обратного скремблирования с использованием последовательности скремблирования, использованной для первого пилот-сигнала, для создания второго пилот-сигнала. Этап 1010 включает в себя подэтап 1011, на котором терминал доступа использует информацию о структуре преамбулы для определения положения, по меньшей мере, одного указанного пилот-символа, включая информацию о помехах в указанной полученной преамбуле.
В некоторых вариантах информация о помехах, например информация о помехах от других секторов, передается посредством значений символов модуляции одной или нескольких поднесущих пилот-символа, а определение информации о помехах включает в себя демодуляцию и декодирование этих символов модуляции для получения пересылаемой информации о помехах. В некоторых вариантах информация о помехах, например информация о помехах от других секторов, передается через фазный множитель, например фазный множитель, применяемый при создании пилот-символа. В некоторых указанных вариантах восстановление информации о помехах из принятой преамбулы включает в себя определение переданного значения фазного множителя и определение передаваемой информации о помехах, например передаваемый уровень помех, который соответствует, например отображается в переданное значение фазового множителя.
От этапа 1010 выполняется переход к этапу 1012, на котором терминал доступа управляет передачей сигналов на основе восстановленной информации о помехах. Примеры управления передачей сигналов на основе восстановленной информации о помехах включают в себя: отказ от передачи, управление и/или изменение скорости передачи, управление и/или изменение уровня мощности передачи, управление и/или изменение скорости передачи данных, управление и/или изменение скорости кодирования передачи, управление и/или изменение кода с коррекцией ошибок, используемого для сигналов передачи, управление и/или изменение режима функционирования и/или управление и/или изменение используемого объема служебной сигнализации для управления.
На Фиг.10 представлена схема примерного устройства 1100 беспроводной связи, например точка доступа или базовая станция, согласно различным вариантам изобретения. Примерное устройство 1100 беспроводной связи включает в себя модуль 1102 беспроводного приемника, модуль 1104 беспроводного передатчика, процессор 1106, модуль 1108 сетевого интерфейса и память 1110, соединенные вместе через шину 1112, по которой может осуществляться обмен данными и информацией между различными элементами. Память 1110 включает в себя стандартные программы 1118 и данные/информацию 1120. Процессор 1106, например CPU, выполняет стандартные программы 1118 и использует данные/информацию 1120 в памяти 1110 для управления работой устройства 1100 беспроводной связи и реализации способов, например способов по схеме 900 на Фиг.8.
Модуль 1102 беспроводного приемника, например приемник OFDM, соединен с приемной антенной 1114, через которую устройство беспроводной связи принимает сигналы, включая сигналы, на базе которых измеряются помехи. Модуль 1104 беспроводного передатчика, например передатчик OFDM, соединен с передающей антенной 1116, через которую устройство беспроводной связи передает сигналы. Модуль 1104 беспроводного передатчика передает созданные преамбулы. Модуль 1104 беспроводного передатчика также передает кадры прямой линии связи, например кадры нисходящей линии связи, включающие в себя данные трафика и/или данные управления. В некоторых вариантах модуль 1104 беспроводного передатчика передает первый пилот-символ OFDM и второй пилот-символ OFDM как соседние символы OFDM в преамбуле, например преамбуле суперкадра. В некоторых вариантах пилот-символ является последним символом, переданным в преамбуле.
В некоторых вариантах для передачи и приема используют одну и ту же антенну. В некоторых вариантах для приема используют множество антенн и/или множество антенных элементов. В ряде вариантов для передачи используют множество антенн и/или множество антенных элементов. В некоторых вариантах, по меньшей мере, некоторые из одинаковых антенн или антенных элементов используют как для передачи, так и для приема. В ряде вариантов в устройстве 1100 беспроводной связи используются технологии MIMO.
Модуль 1108 сетевого интерфейса соединен с другими сетевыми узлами, например другими точками доступа/базовыми станциями, узлом ААА, узлом собственного агента и т.д. и/или с Интернет через сетевую линию 1109 связи.
Стандартные программы 1118 включают в себя модуль 1122 измерения помех, модуль 1124 создания преамбулы и модуль 1130 управления режимом создания пилот-сигналов. Модуль 1124 создания преамбулы включает в себя модуль 1126 создания символов широковещательного канала и модуль 1128 создания пилот-символов. Модуль 1128 создания пилот-символов включает в себя модуль 1132 создания первого пилот-сигнала, модуль 1134 создания второго пилот-сигнала и модуль 1136 создания информации о помехах.
Данные/информация 1120 включает в себя информацию 1138 об измеренных помехах, информацию 1140 о конфигурации системы, созданные символы 1142 широковещательного канала, созданный первый пилот-сигнал 1144, созданный второй пилот-сигнал 1146, созданную информацию 1148 о помехах, подлежащую передаче, созданную преамбулу 1150, информацию 1152 о структуре временных характеристик/частот, информацию 1156 о последовательности скремблирования, информацию 1158 о сдвиге и информацию 1160 о режиме. Информация 1152 о структуре временных характеристик/частот включает в себя информацию 1154, определяющую преамбулу. Информация 1152 о структуре временных характеристик/частот включает в себя информацию, идентифицирующую структуру прямой линии связи и структуру обратной линии связи, например суперкадры прямой линии связи, содержащие преамбулы и кадры. Примерные структуры преамбулы показаны на Фиг.3 и 7. Информация, определяющая указанные структуры, может быть включена в информацию 1154. Информация 1160 о режиме включает в себя информацию, идентифицирующую альтернативные режимы, в которых могут работать устройства беспроводной связи, например асинхронный режим и полусинхронный режим работы, а также информацию, идентифицирующую текущий режим работы. В некоторых вариантах устройство 1100 беспроводной связи, например базовая станция, изменяет процесс создания пилот-сигнала при создании преамбулы в зависимости от режима, например, чтобы соответствовать условиям, когда соседние базовые станции ведут передачу асинхронно, и когда соседние базовые станции ведут передачу в полусинхронном режиме.
Модуль 1122 измерения помех измеряет помехи. В некоторых вариантах модуль 1122 измерения помех представляет собой модуль измерения помех от других секторов, который измеряет помехи в отношении секторов, отличных от сектора, из которого передана созданная преамбула. Выходом модуля 1122 измерения помех является информация 1138 об измеренных помехах.
Модуль 1124 создания преамбулы создает преамбулу, например преамбулу 1150, причем указанная преамбула включает в себя множество пилот-символов, по меньшей мере, один из которых содержит информацию о помехах.
Модуль 1126 создания символов широковещательного канала создает, по меньшей мере, один символ, соответствующий широковещательному каналу, используемому для передачи информации о конфигурации системы. В некоторых вариантах поддерживается множество широковещательных каналов. В ряде указанных вариантов, по меньшей мере, один символ включает в себя первый широковещательный канал и часть второго широковещательного канала.
В различных вариантах модуль 1124 создания преамбулы создает пилот-сигналы, которые являются пилот-сигналами захвата, используемыми, по меньшей мере, для одного из: захвата временных характеристик и/или идентификации сектора. В некоторых вариантах модуль 1124 создания преамбулы включает в себя больше символов, используемых для передачи информации о конфигурации системы, чем используемых для передачи информации о помехах в созданной преамбуле. В некоторых вариантах созданная преамбула является преамбулой суперкадра, а в преамбуле для передачи информации о помехах используют, по меньшей мере, два символа.
Модуль 1128 создания пилот-символов создает пилот-символы созданной преамбулы 1150. Модуль 1132 создания первого пилот-сигнала создает первый пилот-сигнал, по меньшей мере, на нескольких поднесущих первого пилот-символа OFDM. Модуль 1134 создания второго пилот-сигнала создает второй пилот-сигнал, по меньшей мере, на нескольких поднесущих второго пилот-символа OFDM. Модуль 1136 создания информации о помехах создает информацию о помехах, по меньшей мере, на нескольких других поднесущих второго пилот-сигнала OFDM. Множество пилот-символов, включенных в преамбулу, содержит созданные первый и второй пилот-сигналы.
В различных вариантах модуль 1134 создания второго пилот-сигнала создает второй пилот-сигнал, используя последовательность скремблирования, которая применяется к первому пилот-сигналу, созданному модулем 1132 создания первого пилот-сигнала. В некоторых вариантах модуль 1134 создания второго пилот-сигнала включает в себя модуль 1135 сдвига для применения сдвига к последовательности скремблирования, используемой для создания второго пилот-сигнала. В некоторых вариантах сдвиг зависит от информации о помехах. В различных вариантах сдвиг имеет единичный модуль, например имеет вид exp(j*theta).
Модуль 1130 управления режимом создания пилот-сигнала управляет модулем 1134 создания второго пилот-сигнала для работы в данный момент времени в одном из режимов: первом или втором, причем первый режим работы соответствует асинхронному режиму работы устройства связи, а второй режим работы соответствует полусинхронному режиму работы устройства связи, при этом указанный модуль 1134 создания второго пилот-сигнала создает второй пилот-сигнал по-разному при работе в указанном первом и указанном втором режимах.
На Фиг.11 показана схема примерного терминала 1200 доступа согласно различным вариантам изобретения. Примерный терминал 1200 доступа включает в себя модуль 1202 беспроводного приемника, модуль 1204 беспроводного передатчика, процессор 1206, устройства 1208 ввода/вывода пользователя и память 1210, соединенные вместе через шину 1212, по которой может осуществляться обмен данными и информацией между различными элементами. Память 1210 включает в себя стандартные программы 1218 и данные/информацию 1220. Процессор 1206, например CPU, выполняет стандартные программы 1218 и использует данные/информацию 1220 в памяти 1210 для управления работой терминала 1200 доступа и реализации способов, например способов по блок-схеме 1000 на Фиг.9.
Модуль 1202 беспроводного приемника, например приемник OFDM, соединен с приемной антенной 1214, через которую терминал 1200 доступа принимает сигналы нисходящей лини связи от устройств связи, например точек доступа. Модуль 1202 беспроводного приемника принимает преамбулу, например полученную преамбулу 1234, причем указанная преамбула включает в себя множество пилот-символов, по меньшей мере, один из которых содержит информацию о помехах. Модуль 1202 беспроводного приемника также принимает информацию, переданную в кадрах прямой линии связи, например данные трафика нисходящей линии связи и данные управления. Модуль 1204 беспроводного передатчика, например передатчик OFDM, соединен с передающей антенной 1216, через которую терминал 1200 доступа передает сигналы восходящей линии связи на устройства связи, например точки доступа.
В некоторых вариантах для передачи и приема используют одну и ту же антенну. В некоторых вариантах для приема используют множество антенн и/или множество антенных элементов. В ряде вариантов для передачи используют множество антенн и/или множество антенных элементов. В некоторых вариантах, по меньшей мере, некоторые из одинаковых антенн или антенных элементов используют как для передачи, так и для приема. В ряде вариантов в терминале 1200 доступа используются технологии MIMO.
Пользовательские устройства 1208 ввода/вывода включают в себя, например, микрофон, клавиатуру, клавишную панель, переключатели, камеру, динамик, дисплей и т.д. Пользовательские устройства 1208 ввода/вывода позволяют пользователю терминала 1200 доступа вводить данные/информацию, осуществлять доступ к выходным данным/информации и управлять, по меньшей мере, некоторыми функциями терминала 1200 доступа, например инициировать сеанс связи с равноправным узлом, например другим терминалом доступа.
Стандартные программы 1218 включают в себя модуль 1222 восстановления информации о помехах, модуль 1226 управления передачей, модуль 1228 настройки временных характеристик, модуль 1230 идентификации сектора и модуль 1232 восстановления системной информации.
Данные/информация 1220 включает в себя принятую преамбулу 1234, восстановленную информацию 1236 о помехах, восстановленную информацию 1238 о конфигурации системы, информацию 1240 о временных характеристиках, информацию 1242 о секторе, информацию 1244 о структуре временных характеристик и частот, информацию 1249 о восстановлении помех и информацию 1250 для управления передачей. Информация 1244 о структуре временных характеристик/частот включает в себя сохраненную информацию 1246 о структуре преамбулы и информацию 1248 о кадрах. Сохраненная информация 1246 о структуре преамбулы включает в себя информацию, указывающую положение, по меньшей мере, одного пилот-символа, включая информацию о помехах в указанной принятой преамбуле. На Фиг.3 и 7 показаны некоторые примеры структур преамбулы, для которых в информацию 1246 может быть включена информация, определяющая указанную структуру.
Модуль 1222 восстановления информации о помехах восстанавливает информацию о помехах из принятой преамбулы. Восстановленная информация 1236 о помехах является выходом модуля 1222 восстановления. В некоторых вариантах для передачи информации о помехах в принятой преамбуле используется, по меньшей мере, два символа, а модуль восстановления информации о помехах восстанавливает информацию о помехах, по меньшей мере, из двух символов. В различных вариантах модуль 1222 восстановления информации о помехах использует сохраненную информацию 1246 о структуре преамбулы для определения положения, по меньшей мере, одного пилот-символа, включая информацию, содержащуюся в принятой преамбуле.
В некоторых вариантах модуль 1222 восстановления информации о помехах включает в себя модуль 1224 обратного скремблирования, который выполняет операцию обратного скремблирования с использованием последовательности скремблирования, примененной к первому пилот-сигналу для создания второго пилот-сигнала. В различных вариантах модуль 1222 восстановления информации о помехах включает в себя фазовый модуль 1225. Фазовый модуль 1225 исходя из измеренного фазового сдвига принятого в преамбуле пилот-символа определяет информацию о помехах, которая передается, например один из множества заранее определенных уровней помех. В некоторых вариантах фазовый модуль 1225 также измеряет фазу принятого пилот-символа, в то время как в других вариантах фазовый сдвиг измеряется отдельным модулем измерения фазового сдвига, например, являющимся частью модуля 1222 восстановления информации о помехах или модуля 1202 беспроводного приемника.
Модуль 1226 управления передачей управляет передачей сигналов на основе установленной информации о помехах. Информация 1250 для управления передачей включает в себя информацию, используемую при управлении, например альтернативные настройки, уровни, критерии и определенные настройки управления. Примерные управляющие воздействия на передачу, реализуемые модулем 1226, включают в себя одно или несколько из следующего: отказ от передачи, управление и/или изменение скорости передачи, управление и/или изменение уровня мощности передачи, управление и/или изменение скорости передачи данных, управление и/или изменение скорости кодирования передачи, управление и/или изменение кода с коррекцией ошибок, используемого для сигналов передачи, управление и/или изменение режима функционирования и/или управление и/или изменение используемого объема служебной сигнализации для управления.
Модуль 1228 захвата временных характеристик выполняет операцию захвата временных характеристик с использованием, по меньшей мере, одного из пилот-символов, включенных в принятую преамбулу. Информация 1240 о временных характеристиках, например настройка сдвига временных характеристик, является выходом модуля 1228 захвата временных характеристик, причем эта информация используется модулем 1202 беспроводного приемника и/или модулем 1204 беспроводного передатчика.
Модуль 1230 идентификации сектора идентифицирует сектор, из которого была передана полученная преамбула, на основе, по меньшей мере, одного из указанных пилот-символов, включая информацию о помехах, содержащуюся в принятой преамбуле. Информация 1242 о секторе, например идентифицированный сектор источника принятой преамбулы 1234, является выходом модуля 1230 идентификации.
Модуль 1232 восстановления системной информации восстанавливает информацию 1238 о конфигурации системы, по меньшей мере, из некоторых не пилотных символов принятой преамбулы. В некоторых вариантах принятая преамбула 1234 включает в себя больше символов, используемых для передачи информации о конфигурации системы, чем используемых для передачи информации о помехах.
В некоторых вариантах принятая преамбула является преамбулой суперкадра. В некоторых вариантах символы в преамбуле суперкадра включают в себя одинаковое количество тональных сигналов на символ, как символы, используемые для передачи данных в виде части кадра в теле суперкадра. В некоторых других вариантах символы в преамбуле суперкадра включают в себя меньше тональных сигналов на символ, чем символы, используемые для передачи данных в виде части кадра в теле суперкадра.
Информация 1249 о восстановлении помех включает в себя информацию, используемую модулем 1222 восстановления помех для получения восстановленной информации 1236 о помехах. Примерная информация 1249 о восстановлении помех включает в себя: информацию, идентифицирующую поднесущие, которые используют для переноса символов модуляции в пилот-символе, используемом для передачи информации о помехах; информацию декодирования и/или демодуляции, используемую для восстановления информации о помехах, например передаваемый уровень помех, из одного или нескольких символов модуляции пилот-символа, используемого для переноса информации о помехах; и/или информацию, отображающую фазовые сдвиги в информацию о помехах, например информацию, преобразующую множество уровней помех, в различные фазовые сдвиги.
На Фиг.12 показана схема, иллюстрирующая различные примерные пилот-символы, используемые для переноса информации о помехах в некоторых вариантах. В примере на Фиг.12 пилот-символы, используемые для переноса информации о помехах, включают в себя некоторые поднесущие, передающие тональный пилот-сигнал, как показано стрелкой, причем некоторые поднесущие намеренно передают нули, указанные как NULL, и некоторые поднесущие, используемые для символов модуляции, обеспечивают передачу канала помех. Примерный пилот-символ 1302 является вторым пилот-символом преамбулы из сектора А, например, первой базовой станции, несущей информацию о помехах, которая указывает уровень 1 помех через значения 11А и 11В символов модуляции. Примерный пилот-символ 1304 является вторым пилот-символом преамбулы из сектора А, например, первой базовой станции, который несет информацию о помехах, указывающую уровень 2 помех через значения 12А и 12В символов модуляции. Примерный пилот-символ 1306 является вторым пилот-символом преамбулы из сектора А, например, первой базовой станции, который несет информацию о помехах, указывающую уровень 3 помех через значения 13А и 13В символов модуляции.
Примерный пилот-символ 1308 является вторым пилот-символом преамбулы из сектора В, например, второй базовой станции, который несет информацию о помехах, указывающую уровень 1 помех через значения 11А и 11В символов модуляции. Примерный пилот-символ 1310 является вторым пилот-символом преамбулы из сектора В, например, второй базовой станции, который несет информацию о помехах, указывающую уровень 2 помех через значения 12А и 12В символов модуляции. Примерный пилот-символ 1312 является вторым пилот-символом преамбулы из сектора В, например, второй базовой станции, который несет информацию о помехах, указывающую уровень 3 помех через значения 13А и 13В символов модуляции.
В этом примерной варианте положение в пилот-символе ресурсов, используемых для изменения пилот-сигналов, изменяется в зависимости от сектора. Вдобавок, положение в пилот-символе ресурсов, используемых для символов модуляции, переносящих информацию о помехах, изменяется в зависимости от сектора.
На Фиг.13 показана схема, иллюстрирующая различные примерные пилот-символы, используемые для переноса информации о помехах в некоторых вариантах. В примере на Фиг.13 пилот-символы, используемые для переноса информации о помехах, включают в себя некоторые поднесущие, передающие тональный пилот-сигнал, как показано стрелкой, причем некоторые поднесущие намеренно передают нули, указанные как NULL. В примере по Фиг.14 пилот-символы, используемые для переноса информации о помехах, включают в себя различные фазовые сдвиги, соответствующие разным уровням помех. Разные фазовые сдвиги указаны направлением стрелок пилот-сигнала. Примерный пилот-символ 1402 является вторым пилот-символом преамбулы из сектора А, например, первой базовой станции, несущей информацию о помехах, которая указывает уровень 1 помех через значения фазового сдвига 0 градусов. Примерный пилот-символ 1404 является вторым пилот-символом преамбулы из сектора А, например, первой базовой станции, который несет информацию о помехах, указывающую уровень 2 помех через фазовый сдвиг 120 градусов. Примерный пилот-символ 1406 является вторым пилот-символом преамбулы из сектора А, например, первой базовой станции, который несет информацию о помехах, указывающую уровень 3 помех через фазовый сдвиг 240 градусов.
Примерный пилот-символ 1408 является вторым пилот-символом преамбулы из сектора В, например, второй базовой станции, который несет информацию о помехах, указывающую уровень 1 помех через фазовый сдвиг 0 градусов. Примерный пилот-символ 1410 является вторым пилот-символом преамбулы из сектора В, например, второй базовой станции, который несет информацию о помехах, указывающую уровень 2 помех через фазовый сдвиг 120 градусов. Примерный пилот-символ 1412 является вторым пилот-символом преамбулы из сектора В, например, второй базовой станции, который несет информацию о помехах, указывающую уровень 3 помех через фазовый сдвиг 240 градусов.
В этом примерном варианте положение в пилот-символе ресурсов, используемых для изменения пилот-сигналов, изменяется в зависимости от сектора. Фаза, связанная с пилот-символом, изменяется в зависимости от принимаемого уровня помех.
Некоторые варианты включают в себя скремблирование как часть создания пилот-символа, содержащего информацию о помехах. Указанные варианты могут отличаться от примерных вариантов, описанных применительно к Фиг.12 и 13. Например, в некоторых вариантах входной пилот-символ подвергается воздействию последовательности скремблирования и умножается на множитель фазового сдвига для создания пилот-символа, переносящего информацию о помехах, а информация о помехах, например информация о помехах от других секторов, передается через используемое выбранное значение множителя фазового сдвига.
Предшествующее осуществление изобретения раскрытых вариантов изобретения предложено для того, чтобы дать возможность специалистам в данной области техники выполнить или использовать различные признаки изобретения. Специалистам в данной области техники очевидны различные модификации этих вариантов, а определенные здесь базовые принципы можно применить к другим вариантам, не выходя за рамки существа или объема изобретения. Таким образом, здесь не предполагается, что различные варианты изобретения ограничены показанными здесь вариантами, а подразумевается, что они должны соответствовать самому широкому объему, соответствующему раскрытым здесь принципам и новым признакам.
В различных вариантах описанные здесь узлы реализуют с использованием одного или нескольких модулей для выполнения этапов, соответствующих одному или нескольким способам некоторого аспекта, например этапы обработки сигналов, создания и/или передачи сообщений. Таким образом, в некоторых вариантах различные признаки реализуются с использованием модулей. Указанные модули могут быть реализованы с использованием программных средств, аппаратных средств или комбинации программных и аппаратных средств. Многие из вышеописанных способов или этапов этих способов могут быть реализованы с использованием выполняемых машиной команд, таких как программные средства, включенные в машиночитаемый носитель, такой как устройство памяти например, RAM, гибкий диск, компакт-диск, DVD и т.д. для управления машиной, например компьютером общего назначения с или без дополнительных аппаратных средств, для реализации всех или части из вышеописанных способов, например, в одном или нескольких узлах. Соответственно, среди прочего, данный аспект относится к машиночитаемому носителю, содержащему считываемые машиной команды, заставляющие машину, например процессор и связанные с ним аппаратные средства, выполнять один или несколько этапов вышеописанного способа (способов).
В различных вариантах описанные здесь узлы реализуют с использованием одного или нескольких модулей для выполнения этапов, соответствующих одному или нескольким способам, например этапы обработки сигналов, создания и/или передачи сообщений. Некоторые примерные этапы включают в себя передачу запроса на соединение, прием ответа о соединении, обновление набора информации, указывающей точку доступа, с которой терминал доступа имеет активное соединение, направление запроса на соединение, направление ответа о соединении, определение присваивания ресурса, запрос на ресурсы, обновление ресурсов и т.д. В некоторых вариантах различные признаки реализуются с использованием модулей. Указанные модули могут быть реализованы с использованием программных средств, аппаратных средств или комбинации программных и аппаратных средств. Многие из вышеописанных способов или этапов этих способов могут быть реализованы с использованием выполняемых машиной команд, таких как программные средства, включенные в машиночитаемый носитель, такой как устройство памяти, например RAM, гибкий диск, компакт-диск, DVD и т.д. для управления машиной, например компьютером общего назначения с или без дополнительных аппаратных средств, для реализации всех или части из вышеописанных способов, например, в одном или нескольких узлах. Соответственно, среди прочего, различные варианты изобретения относятся к машиночитаемому носителю, содержащему считываемые машиной команды, заставляющие машину, например процессор и связанные с ним аппаратные средства, выполнять один или несколько этапов вышеописанного способа (способов).
В некоторых вариантах процессор или процессоры, например CPU, из одного ли нескольких устройств, например устройств связи, таких как терминалы доступа и/или точки доступа, сконфигурированы для выполнения описанных этапов способов, выполняемых устройством связи. Конфигурация процессора может быть обеспечена использованием одного или нескольких модулей, например программных модулей, для управления конфигурацией процессора, и/или путем включения аппаратных средств в процессор, например аппаратных модулей, для выполнения указанных этапов и/или управления конфигурацией процессора. Соответственно, некоторые, но не все варианты относятся к устройству, например устройству связи с процессором, который включает в себя модуль, соответствующий каждому из этапов различных описанных способов, выполняемых устройством, в которое входит данный процессор. В некоторых, но не во всех вариантах устройство, например устройство связи, включает в себя модуль, соответствующий каждому из этапов различных описанных способов, выполняемых устройством, в котором содержится данный процессор. Указанные модули могут быть реализованы с использованием программных и/или аппаратных средств.
Специалистам в данной области техники в свете приведенного выше описания будут очевидны многочисленные дополнительные вариации вышеописанных способов и устройства. Такие вариации должны рассматриваться в рамках объема изобретения. Указанные способы и устройство в различных вариантах могут, а в различных вариантах используются со схемой CDMA, ортогональным частотным мультиплексированием (OFDM) и/или различными другими типами технологий связи, которые можно использовать для обеспечения линии беспроводной связи между узлами доступа и мобильными узлами. В некоторых вариантах узлы доступа реализуются в виде базовых станций, которые устанавливают линии связи с мобильными узлами, используя OFDM и/или CDMA. В различных вариантах мобильные узлы реализуются в виде компьютеров типа ноутбук, персональных цифровых помощников (PDA) или других портативных устройств, содержащих цепи приемника/передатчика, логику и/или стандартные программы для реализации способов по различным вариантам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ БЕСПРОВОДНЫХ РЕСУРСОВ | 2007 |
|
RU2407201C2 |
| СТРУКТУРЫ КАДРОВ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2414078C2 |
| ОБНАРУЖЕНИЕ СИГНАЛА ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2419232C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ В БЕСПРОВОДНЫХ СИСТЕМАХ СВЯЗИ | 2007 |
|
RU2420882C2 |
| ОБНАРУЖЕНИЕ СИГНАЛОВ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2432699C2 |
| ЭФФЕКТИВНАЯ СТРУКТУРА КАНАЛОВ ДЛЯ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2406264C2 |
| ОБЕСПЕЧЕНИЕ ВОЗМОЖНОСТИ РАЗДЕЛЕНИЯ РЕСУРСОВ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2430489C2 |
| СИНХРОНИЗАЦИЯ РАЗДЕЛЕННЫХ РЕСУРСОВ СРЕДИ МНОЖЕСТВА СЕКТОРОВ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ С OFDM | 2007 |
|
RU2433538C2 |
| ПИЛОТ-СИГНАЛЫ ОБНАРУЖЕНИЯ ДЛЯ БЕСПРОВОДНЫХ СИСТЕМ СВЯЗИ | 2007 |
|
RU2419204C2 |
| СПОСОБ ОПТИМИЗАЦИИ ЧАСТЕЙ КАДРА | 2005 |
|
RU2358391C2 |
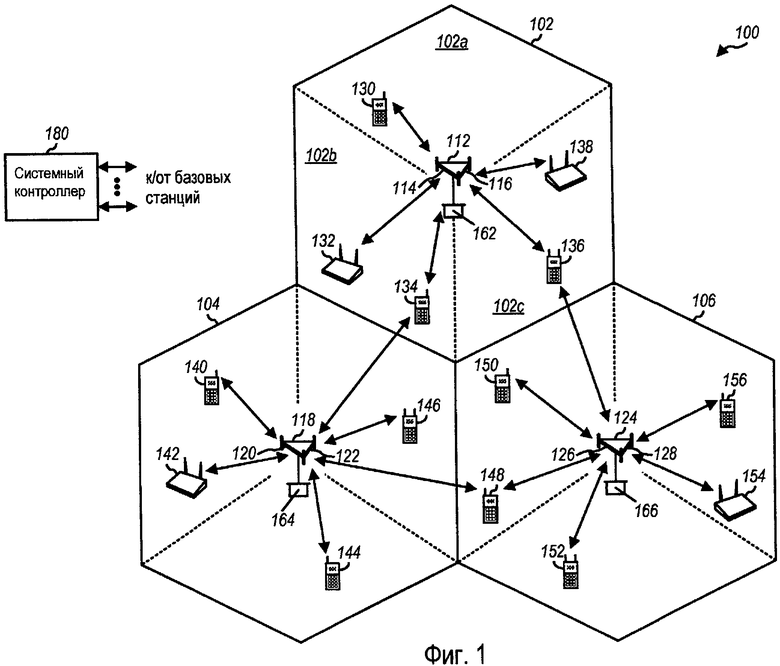
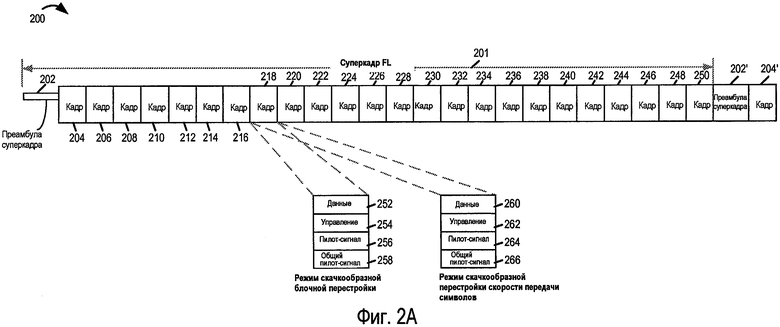
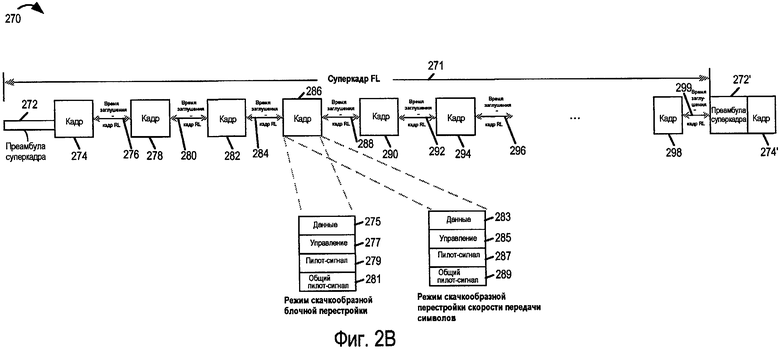
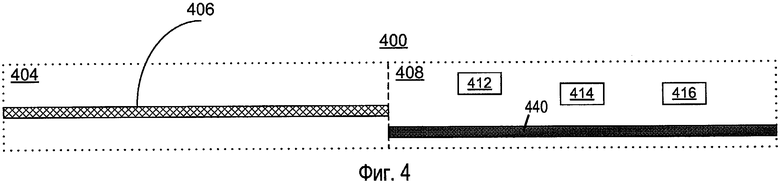
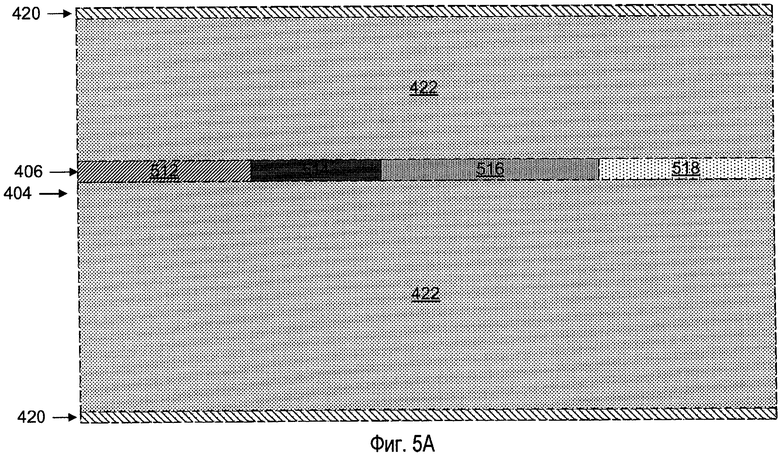
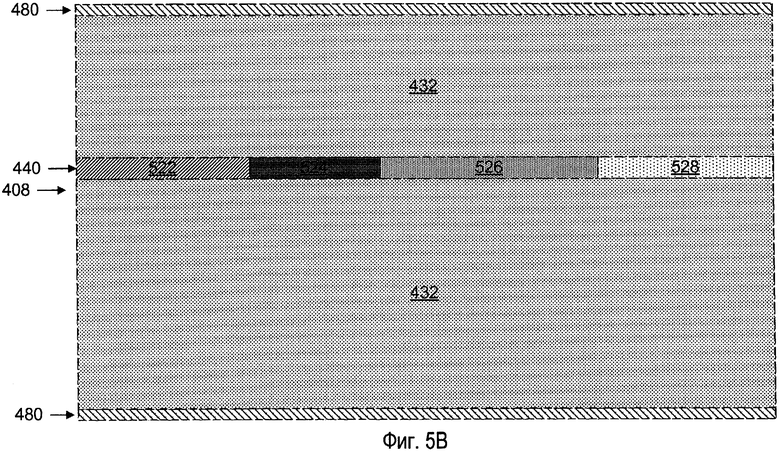
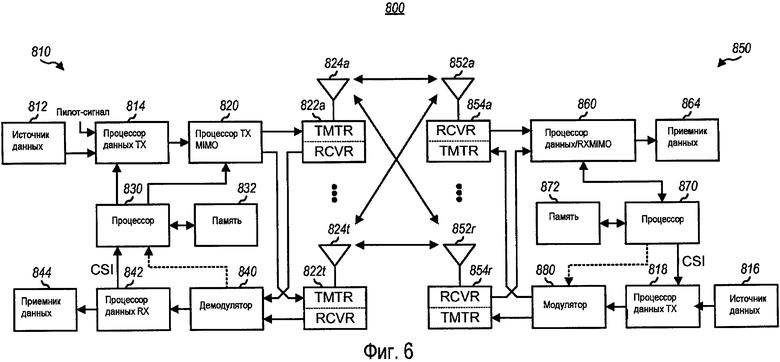
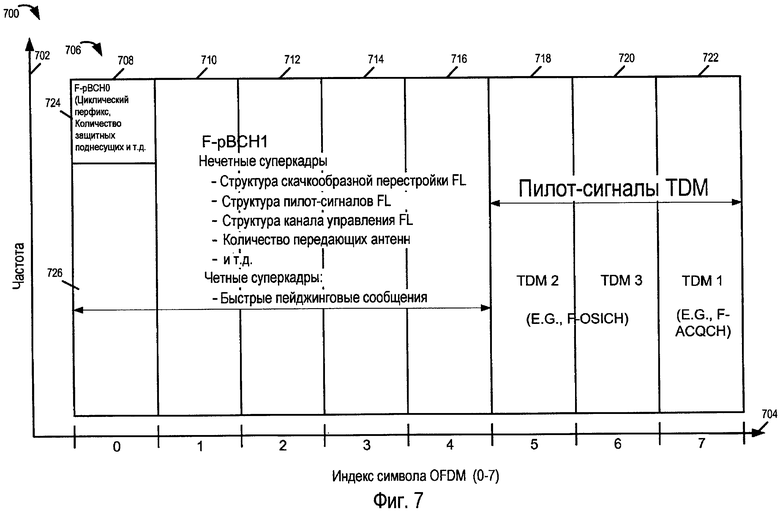
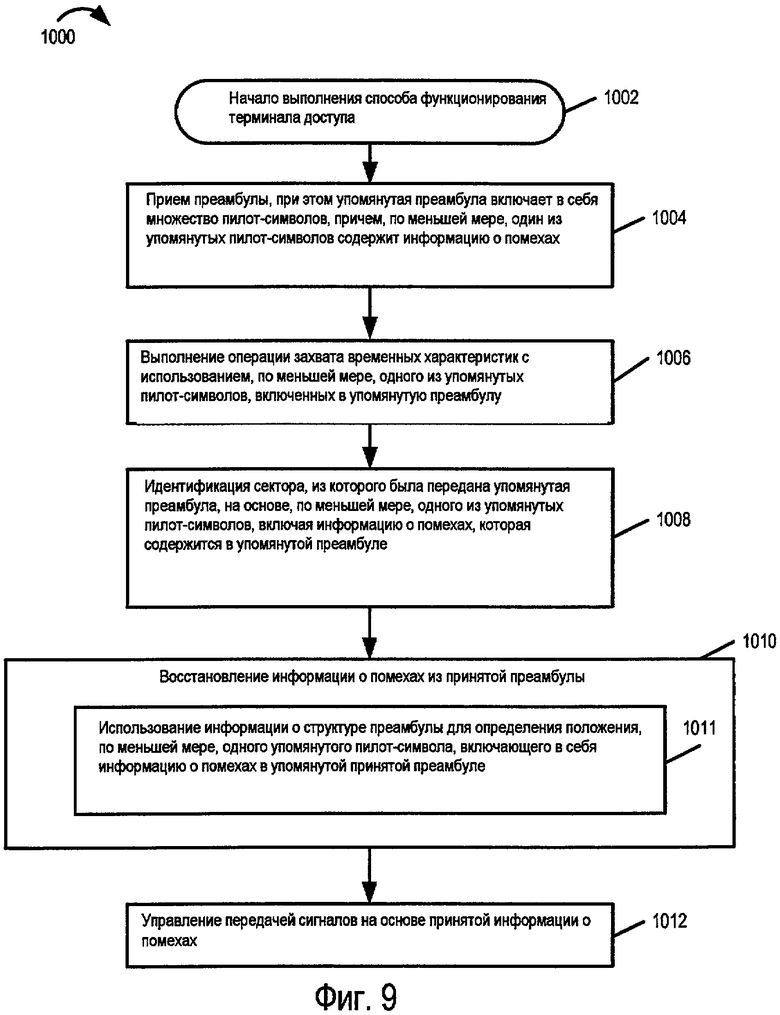
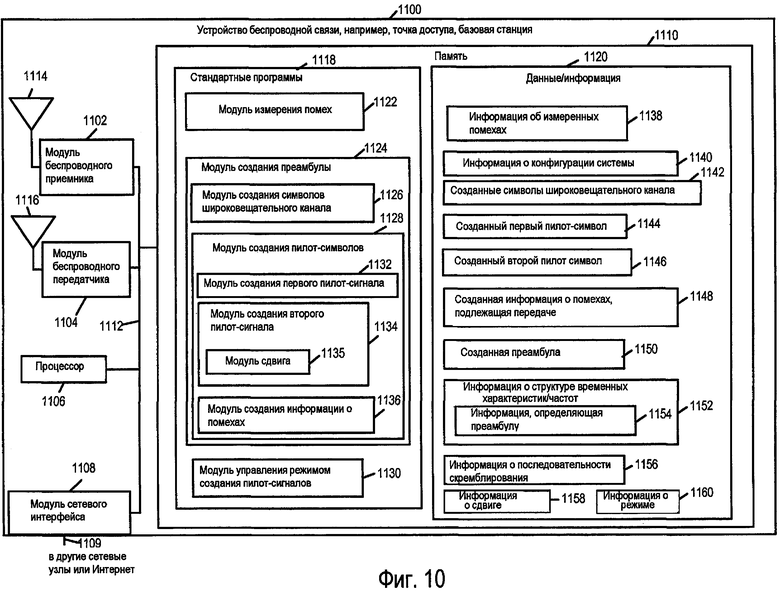
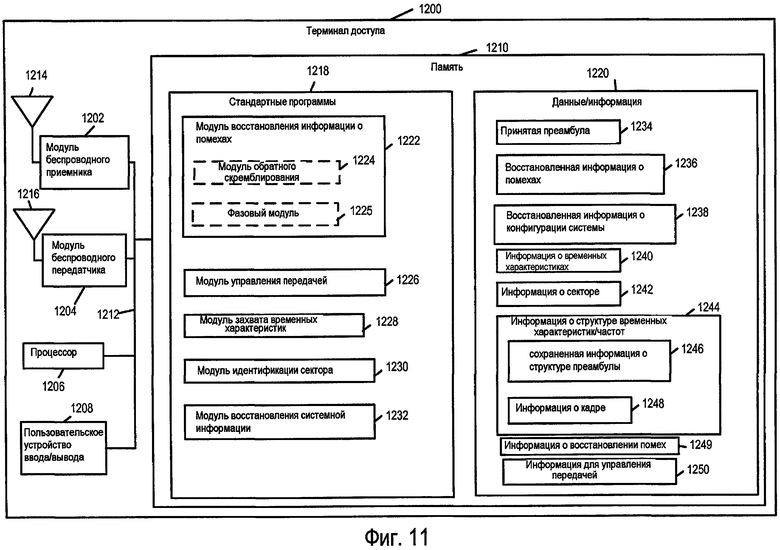
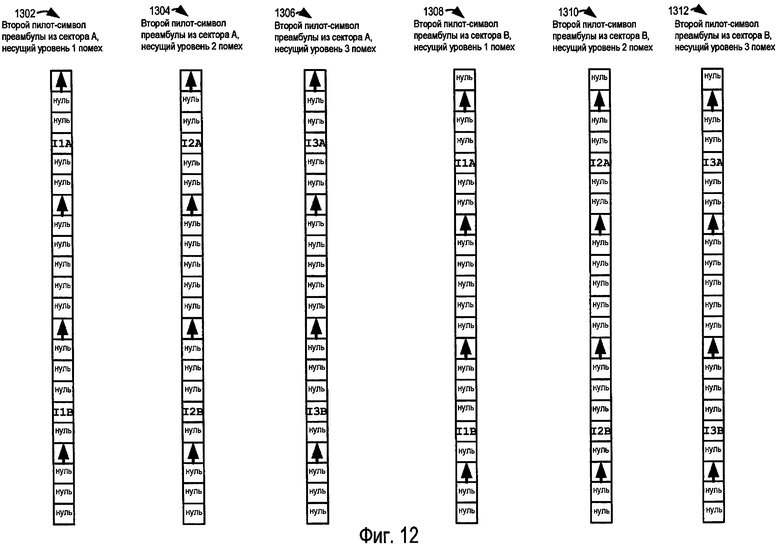
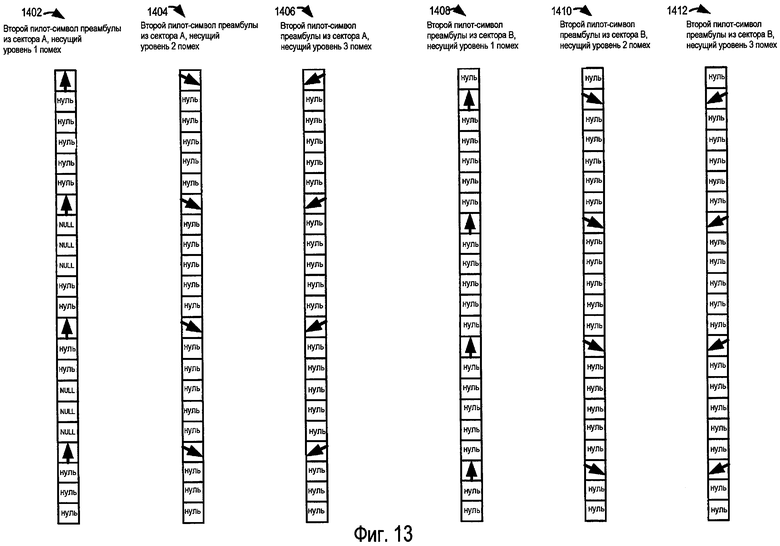
Изобретение относится к технике беспроводной связи и может быть использовано в мобильных телефонах, ноутбуках, коммуникаторах. Устройство связи, например базовая станция, измеряет информацию о помехах, например информацию о помехах от другого сектора. Указанное устройство связи создает преамбулу, которая включает в себя множество пилот-символов, причем, по меньшей мере, один из этих пилот-символов включает в себя информацию о помехах. В некоторых вариантах осуществления преамбула является частью структуры суперкадра, например повторяющейся структуры суперкадра, включающей в себя преамбулу и множество кадров, причем, по меньшей мере, некоторые из кадров используют для передачи данных графика. Устройство связи передает преамбулу, обеспечивая широковещательную передачу информации о помехах на терминалы доступа. Терминал доступа принимает преамбулу, включающую в себя множество пилот-сигналов, при этом, по меньшей мере, один из указанных пилот-сигналов включает в себя информацию о помехах. Терминал доступа восстанавливает информацию о помехах из принятой преамбулы и управляет передачей сигналов на основе восстановленной информации о помехах. Технический результат - повышение эффективности использования полосы пропускания. 10 н. и 62 з.п. ф-лы, 15 ил.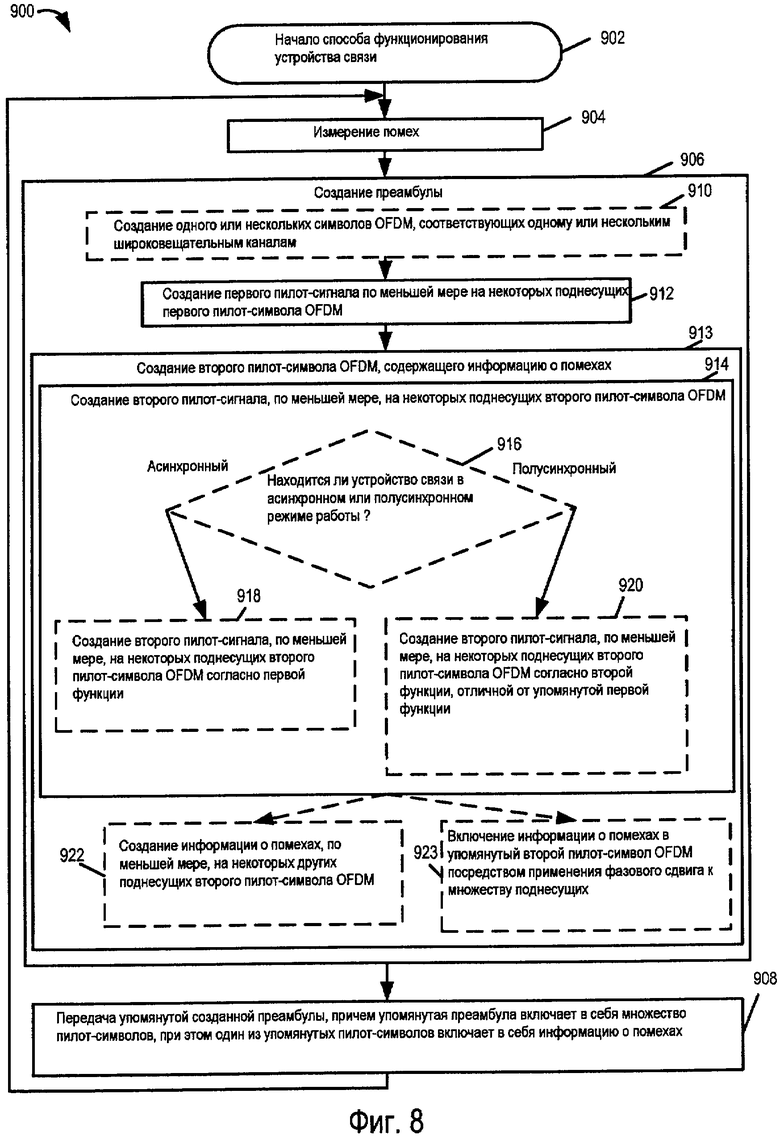
1. Способ функционирования устройства связи, содержащий этапы, на которых:
измеряют помехи;
создают первый пилот-сигнал, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM;
создают второй пилот-сигнал, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM;
создают информацию о помехах, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM; и
передают преамбулу, причем упомянутая преамбула включает в себя множество пилот-символов, причем упомянутое множество пилот-символов, включенных в упомянутую преамбулу, включает в себя упомянутые созданные первый и второй пилот-сигналы, причем, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах.
2. Способ по п.1, в котором передача преамбулы дополнительно включает в себя этап, на котором:
передают в качестве части упомянутой преамбулы, по меньшей мере, один символ, соответствующий широковещательному каналу, используемому для сообщения информации о конфигурации системы.
3. Способ по п.1, в котором упомянутые пилот-символы включают в себя пилот-сигналы захвата, используемые, по меньшей мере, для одного из: захвата временных характеристик и идентификации сектора.
4. Способ по п.2, в котором упомянутая преамбула включает в себя больше символов, используемых для сообщения информации о конфигурации системы, чем информации о помехах.
5. Способ по п.2, в котором упомянутая преамбула является преамбулой суперкадра.
6. Способ по п.5, в котором упомянутые символы в упомянутой преамбуле суперкадра включают в себя меньше тональных сигналов на символ, чем символы, используемые для сообщения данных в виде части кадра в теле упомянутого суперкадра.
7. Способ по п.2, в котором, по меньшей мере, два символа в упомянутой преамбуле используют для сообщения информации о помехах.
8. Способ по п.7, в котором измерение помех включает в себя этап, на котором:
измеряют помехи в отношении секторов, отличных от сектора, из которого передана упомянутая преамбула.
9. Способ по п.1, в котором создание упомянутого второго пилот-сигнала включает в себя этап, на котором:
используют последовательность скремблирования, которая применяется к первому пилот-сигналу.
10. Способ по п.9, в котором создание упомянутого второго пилот-сигнала дополнительно включает в себя этап, на котором умножают последовательность скремблирования, используемую для создания второго пилот-сигнала, на сдвиг.
11. Способ по п.10, в котором упомянутый сдвиг зависит от упомянутой информации о помехах.
12. Способ по п.11, в котором упомянутый сдвиг имеет единичный модуль.
13. Способ по п.1, в котором передача преамбулы включает в себя этап, на котором передают первый пилот-символ OFDM и второй пилот-символ OFDM как смежные символы в упомянутой преамбуле.
14. Способ по п.1, дополнительно содержащий этап, на котором:
управляют созданием пилот-сигналов, осуществляемым по-разному во время асинхронного режима работы и во время полусинхронного режима работы, причем второй пилот-сигнал создается с использованием разных функций во время упомянутого асинхронного режима работы и во время упомянутого полусинхронного режима работы.
15. Способ по п.1, в котором создание упомянутого пилот-символа, включающего в себя информацию о помехах, включает в себя введение информации о помехах через фазовый сдвиг, применяемый к множеству поднесущих.
16. Способ по п.15, в котором упомянутый фазовый сдвиг применяют путем выполнения операции фазового умножения на входной пилот-символ, который не включает в себя информацию о помехах, для создания упомянутого пилот-символа, включающего в себя информацию о помехах.
17. Устройство беспроводной связи, содержащее:
модуль измерения помех; и
модуль создания преамбулы для создания преамбулы, причем упомянутая преамбула включает в себя множество пилот-символов, причем, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах,
причем упомянутый модуль создания преамбулы включает в себя модуль создания первого пилот-сигнала для создания первого пилот-сигнала, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM;
модуль создания второго пилот-сигнала для создания второго пилот сигнала, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM;
модуль создания информации о помехах для создания информации о помехах, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM; и причем упомянутое множество пилот-символов, включенных в упомянутую преамбулу, включает в себя упомянутые созданные первый и второй пилот-сигналы.
18. Устройство по п.17, дополнительно содержащее:
модуль беспроводного передатчика для передачи упомянутой созданной преамбулы.
19. Устройство по п.17, в котором упомянутый модуль создания преамбулы включает в себя
модуль создания первого символа для создания, по меньшей мере, одного символа, соответствующего широковещательному каналу, используемому для сообщения информации о конфигурации системы.
20. Устройство по п.17, в котором упомянутый модуль создания преамбулы создает пилот-сигналы, которые являются пилот-сигналами захвата, используемыми, по меньшей мере, для одного из: захвата временных характеристик и идентификации сектора.
21. Устройство по п.18, в котором упомянутый модуль создания преамбулы включает в себя больше символов, используемых для сообщения информации о конфигурации системы, чем информации о помехах в созданной преамбуле.
22. Устройство по п.18, в котором упомянутая преамбула является преамбулой суперкадра; и
в котором, по меньшей мере, два символа в упомянутой преамбуле используют для сообщения информации о помехах.
23. Устройство по п.22, в котором упомянутый модуль измерения помех является модулем измерения помех от других секторов, который измеряет помехи в отношении секторов, отличных от сектора, из которого передана упомянутая преамбула.
24. Устройство по п.17, в котором упомянутый модуль создания второго пилот-сигнала создает второй пилот-сигнал с использованием последовательности скремблирования, которая применяется к первому пилот-сигналу, созданному модулем создания первого пилот-сигнала.
25. Устройство по п.24, в котором модуль создания второго пилот-сигнала включает в себя модуль сдвига для применения сдвига к последовательности скремблирования, используемой для создания второго пилот-сигнала.
26. Устройство по п.17, в котором упомянутый передатчик передает первый пилот-символ OFDM и второй пилот-символ OFDM как смежные символы OFDM в упомянутой преамбуле.
27. Устройство по п.17, дополнительно содержащее:
модуль управления режимом создания пилот-сигналов для управления модулем создания второго пилот-сигнала для работы в данный момент времени в первом или втором режиме, причем упомянутый первый режим соответствует асинхронному режиму работы устройства связи, а упомянутый второй режим соответствует полусинхронному режиму работы устройства связи, при этом упомянутый модуль создания пилот-сигналов создает второй пилот-сигнал по-разному во время работы в упомянутых первом и втором режимах.
28. Устройство беспроводной связи, содержащее:
средство измерения помех; и
средство для создания преамбулы, причем упомянутая преамбула включает в себя множество пилот-символов, при этом, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах;
причем упомянутое средство для создания включает в себя:
средство создания первого пилот-сигнал для создания первого пилот-сигнала, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM;
средство создания второго пилот-сигнала для создания второго пилот сигнала, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM;
средство создания информации о помехах для создания информации о помехах, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM; и причем упомянутое множество пилот-символов, включенных в упомянутую преамбулу, включает в себя упомянутые созданные первый и второй пилот-сигналы.
29. Устройство по п.28, дополнительно содержащее:
средство для передачи упомянутой созданной преамбулы.
30. Устройство по п.28, в котором упомянутое средство создания включает в себя средство создания первого символа для создания, по меньшей мере, одного символа, соответствующего широковещательному каналу, используемому для сообщения информации о конфигурации системы.
31. Устройство по п.28, в котором упомянутое средство для создания создает пилот-сигналы, которые являются пилот-сигналами захвата, используемыми, по меньшей мере, для одного из: захвата временных характеристик и идентификации сектора.
32. Устройство беспроводной связи, содержащее:
процессор, выполненный с возможностью:
измерять помехи;
создавать первый пилот-сигнал, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM;
создавать второй пилот-сигнал, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM;
создавать информацию о помехах, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM; и
приводить в действие передатчик для передачи преамбулы, причем упомянутая преамбула включает в себя множество пилот-символов, причем упомянутое множество пилот-символов, включенных в упомянутую преамбулу, включает в себя упомянутые созданные первый и второй пилот-сигналы, при этом, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах.
33. Устройство по п.32, в котором упомянутый процессор дополнительно выполнен с возможностью:
приводить в действие передатчик для передачи в качестве части упомянутой преамбулы, по меньшей мере, одного символа, соответствующего широковещательному каналу, используемому для сообщения информации о конфигурации системы.
34. Устройство по п.32, в котором упомянутые пилот-символы включают в себя пилот-сигналы захвата, используемые, по меньшей мере, для одного из: захвата временных характеристик и идентификации сектора.
35. Устройство по п.32, в котором упомянутый процессор дополнительно выполнен с возможностью:
управлять созданием пилот-сигналов, осуществляемым по-разному во время асинхронного режима работы и во время полусинхронного режима работы, причем упомянутый второй пилот-сигнал создается с использованием разной функции во время упомянутого асинхронного режима работы и во время упомянутого полусинхронного режима работы.
36. Машиночитаемый носитель, реализующий машиноисполняемые команды для управления устройством связи для осуществления способа связи с другим устройством связи, причем способ содержит этапы, на которых:
измеряют помехи;
создают первый пилот-сигнал, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM;
создают второй пилот-сигнал, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM;
создают информацию о помехах, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM; и
передают преамбулу, причем упомянутая преамбула включает в себя множество пилот-символов, причем упомянутое множество пилот-символов, включенных в упомянутую преамбулу, включает в себя упомянутые созданные первый и второй пилот-сигналы;
при этом, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах.
37. Машиночитаемый носитель по п.36, дополнительно реализующий машиноисполняемые команды для этапа, на котором:
передают в качестве части упомянутой преамбулы, по меньшей мере, один символ, соответствующий широковещательному каналу, используемому для сообщения информации о конфигурации системы.
38. Машиночитаемый носитель по п.36, в котором упомянутые пилот-символы включают в себя пилот-сигналы захвата, используемые, по меньшей мере, для одного из: захвата временных характеристик и идентификации сектора.
39. Машиночитаемый носитель по п.36, дополнительно реализующий машиноисполняемые команды для этапа, на котором:
управляют созданием пилот-сигналов, осуществляемым по-разному во время асинхронного режима работы и во время полусинхронного режима работы, причем второй пилот-сигнал создается с использованием разной функции во время упомянутого асинхронного режима работы и во время упомянутого полусинхронного режима работы.
40. Способ функционирования терминала доступа, причем способ содержит этапы, на которых:
принимают преамбулу, причем упомянутая преамбула включает в себя множество пилот-символов, при этом множество пилот-символов включает в себя первый пилот-сигнал, причем первый пилот-сигнал создан, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM, второй пилот-сигнал, причем второй пилот-сигнал создан, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM, при этом, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах, причем информация о помехах создана, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM;
восстанавливают информацию о помехах из принятой преамбулы; и
управляют передачей сигналов на основе восстановленной информации о помехах.
41. Способ по п.40, в котором восстановление упомянутой информации о помехах включает в себя этап, на котором:
используют информацию о структуре преамбулы для определения положения, по меньшей мере, одного упомянутого пилот-символа, включающего в себя информацию о помехах в упомянутой принятой преамбуле.
42. Способ по п.41, дополнительно содержащий этап, на котором:
выполняют операцию захвата временных характеристик с использованием, по меньшей мере, одного из упомянутых пилот-символов, включенных в принятую преамбулу.
43. Способ по п.41, дополнительно содержащий этап, на котором:
идентифицируют сектор, из которого была передана упомянутая принятая преамбула, исходя, по меньшей мере, из одного из упомянутых пилот-символов, включающего себя информацию о помехах, которая включена в принятую преамбулу.
44. Способ по п.41, в котором упомянутая принятая преамбула включает в себя больше символов, используемых для сообщения информации о конфигурации системы, чем информации о помехах.
45. Способ по п.41, в котором упомянутая принятая преамбула является преамбулой суперкадра.
46. Способ по п.45, в котором упомянутые символы в упомянутой преамбуле суперкадра включают в себя меньше тональных сигналов на символ, чем символы, используемые для передачи данных в виде части кадра в теле упомянутого суперкадра.
47. Способ по п.41, в котором, по меньшей мере, два символа в упомянутой принятой преамбуле используют для сообщения информации о помехах; и
причем восстановление информации о помехах из принятой преамбулы включает в себя восстановление информации о помехах, по меньшей мере, из двух упомянутых символов.
48. Способ по п.47, в котором восстановление информации о помехах включает в себя выполнение операции обратного скремблирования с использованием последовательности скремблирования, применяемой к первому пилот-сигналу для создания второго пилот-сигнала.
49. Терминал доступа, содержащий:
приемник для приема преамбулы, причем упомянутая преамбула включает в себя множество пилот-символов, при этом множество пилот-символов включает в себя первый пилот-сигнал, причем первый пилот-сигнал создан, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM, второй пилот-сигнал, причем второй пилот-сигнал создан, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM, при этом, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах, причем информация о помехах создана, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM; и
модуль восстановления информации о помехах для восстановления информации о помехах из принятой преамбулы; и
модуль управления передачей для управления передачей сигналов на основе восстановленной информации о помехах.
50. Терминал доступа по п.49, дополнительно содержащий:
память, включающую в себя сохраненную информацию о структуре преамбулы, указывающую положение, по меньшей мере, одного упомянутого пилот-символа, включающего в себя информацию о помехах в преамбуле; и в котором упомянутый модуль восстановления информации о помехах использует сохраненную информацию о структуре преамбулы для определения положения, по меньшей мере, одного упомянутого пилот-символа, включающего в себя информацию о помехах в упомянутой принятой преамбуле.
51. Терминал доступа по п.50, дополнительно содержащий:
модуль захвата временных характеристик для выполнения операции захвата временных характеристик с использованием, по меньшей мере, одного из упомянутых пилот-символов, включенного в принятую преамбулу.
52. Терминал доступа по п.50, дополнительно содержащий:
модуль идентификации сектора для идентификации сектора, из которого была передана упомянутая принятая преамбула, исходя, по меньшей мере, из одного из упомянутых пилот-символов, включающего в себя информацию о помехах, которая включена в принятую преамбулу.
53. Терминал доступа по п.50, в котором упомянутая принятая преамбула включает в себя больше символов, используемых для сообщения информации о конфигурации системы, чем информации о помехах.
54. Терминал доступа по п.50, в котором упомянутая принятая преамбула является преамбулой суперкадра.
55. Терминал доступа по п.54, в котором упомянутые символы в упомянутой преамбуле суперкадра включают в себя меньше тональных сигналов на символ, чем символы, используемые для передачи данных в виде части кадра в теле упомянутого суперкадра.
56. Терминал доступа по п.50, в котором, по меньшей мере, два символа в упомянутой принятой преамбуле используют для сообщения информации о помехах; и
причем упомянутый модуль восстановления информации о помехах восстанавливает информацию о помехах, по меньшей мере, из двух упомянутых символов.
57. Терминал доступа по п.56, в котором упомянутый модуль восстановления информации о помехах включает в себя:
модуль обратного скремблирования для выполнения операции обратного скремблирования с использованием последовательности скремблирования, применяемой к первому пилот-сигналу для создания второго пилот-сигнала.
58. Терминал доступа, содержащий:
средство приемника для приема преамбулы, причем упомянутая преамбула включает в себя множество пилот-символов, при этом множество пилот-символов включает в себя первый пилот-сигнал, причем первый пилот-сигнал создан, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM, второй пилот-сигнал, причем второй пилот-сигнал создан, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM, при этом, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах, причем информация о помехах создана, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM;
средство для восстановления информации о помехах из принятой преамбулы; и
средство для управления передачей сигналов на основе восстановленной информации о помехах.
59. Терминал доступа по п.58, дополнительно содержащий:
средство памяти, включающее в себя сохраненную информацию о структуре преамбулы, указывающую положение, по меньшей мере, одного упомянутого пилот-символа, включающего в себя информацию о помехах в преамбуле; и в котором упомянутое средство для восстановления использует сохраненную информацию о структуре преамбулы для определения положения, по меньшей мере, одного упомянутого пилот-символа, включающего в себя информацию о помехах в упомянутой принятой преамбуле.
60. Терминал доступа по п.59, дополнительно содержащий:
средство для выполнения операции захвата временных характеристик с использованием, по меньшей мере, одного из упомянутых пилот-символов, включенных в принятую преамбулу.
61. Терминал доступа по п.59, в котором, по меньшей мере, два символа в
упомянутой принятой преамбуле используют для сообщения информации о помехах; и
причем упомянутое средство для восстановления восстанавливает информацию о помехах, по меньшей мере, из двух упомянутых символов.
62. Терминал доступа по п.61, в котором средство для восстановления включает в себя:
средство для выполнения операции обратного скремблирования с использованием последовательности скремблирования, применяемой к первому пилот-сигналу для создания второго пилот-сигнала.
63. Терминал доступа, содержащий:
процессор, выполненный с возможностью:
принимать преамбулу, причем упомянутая преамбула включает в себя множество пилот-символов,
при этом множество пилот-символов включает в себя первый пилот-сигнал, причем первый пилот-сигнал создан, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM, второй пилот-сигнал, причем второй пилот-сигнал создан, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM, при этом, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах, причем информация о помехах создана, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM;
восстанавливать информацию о помехах и принятой преамбулы; и
управлять передачей сигналов на основе восстановленной информации о помехах.
64. Терминал доступа, по п.63, в котором процессор дополнительно выполнен с возможностью при восстановлении упомянутой информации о помехах:
использовать информацию о структуре преамбулы для определения положения, по меньшей мере, одного упомянутого пилот-символа, включающего в себя информацию о помехах в упомянутой принятой преамбуле.
65. Терминал доступа, по п.64, в котором процессор дополнительно выполнен с возможностью:
идентифицировать сектор, из которого была передана упомянутая принятая преамбула, исходя, по меньшей мере, из одного из упомянутых пилот-символов, включающего в себя информацию о помехах, которая включена в принятую преамбулу.
66. Терминал доступа по п.64, в котором, по меньшей мере, два символа в упомянутой принятой преамбуле используют для сообщения информации о помехах; и
причем процессор дополнительно выполнен с возможностью восстанавливать информацию о помехах, по меньшей мере, из двух упомянутых символов при восстановлении информации о помехах из принятой преамбулы.
67. Терминал доступа по п.66, в котором процессор дополнительно выполнен с возможностью выполнять при восстановлении информации о помехах операцию обратного скремблирования с использованием последовательности скремблирования, применяемой к первому пилот-сигналу для создания второго пилот-сигнала.
68. Машиночитаемый носитель, реализующий машиноисполняемые команды для управления терминалом доступа для осуществления способа связи с другим устройством связи, причем способ содержит этапы, на которых:
принимают преамбулу, причем упомянутая преамбула включает в себя множество пилот-символов, при этом множество пилот-символов включает в себя первый пилот-сигнал, причем первый пилот-сигнал создан, по меньшей мере, на некоторых поднесущих первого пилот-символа OFDM, второй пилот-сигнал, причем второй пилот-сигнал создан, по меньшей мере, на некоторых поднесущих второго пилот-символа OFDM, при этом, по меньшей мере, один из упомянутых пилот-символов включает в себя информацию о помехах, причем информация о помехах создана, по меньшей мере, на некоторых других поднесущих второго пилот-символа OFDM;
восстанавливают информацию о помехах из принятой преамбулы; и управляют передачей сигналов на основе восстановленной информации о помехах.
69. Машиночитаемый носитель по п.68, дополнительно реализующий машиноисполняемые команды для этапа, на котором:
используют информацию о структуре преамбулы для определения положения, по меньшей мере, одного упомянутого пилот-символа, включающего в себя информацию о помехах в упомянутой принятой преамбуле.
70. Машиночитаемый носитель по п.69, дополнительно реализующий машиноисполняемые команды для этапа, на котором:
идентифицируют сектор, из которого была передана упомянутая принятая преамбула, исходя, по меньшей мере, из одного из упомянутых пилот-символов, включающего в себя информацию о помехах, которая включена в принятую преамбулу.
71. Машиночитаемый носитель по п.69, в котором, по меньшей мере, два символа в упомянутой принятой преамбуле используют для сообщения информации о помехах; и
дополнительно реализующий исполняемые машиной команды для этапа, на котором восстанавливают информацию о помехах, по меньшей мере, из двух упомянутых символов при восстановлении информации о помехах.
72. Машиночитаемый носитель по п.71, дополнительно реализующий машиноисполняемые команды для этапа, на котором выполняют при восстановлении информации о помехах операцию обратного скремблирования с использованием последовательности скремблирования, применяемой к первому пилот-сигналу для создания второго пилот-сигнала.
| : JIM TOMCIK (Qualcomm, Inc) "MBFDD and MBTDD Wideband Mode: Technology Overview" IEEE 802.20 Working Group on Mobile Broadband Wireless, 06.01.2006, с.58, 59, 65, извлечено из Интернет по адресу: http://www.ieee802.org/20/Contribs/C802.20-05-68r1.pdf | |||
| JIM TOMCIK (Qualcomm, Inc) «QFDD Technology Overview Presentation» IEEE 802.20 Working |

