Перекрестная ссылка
Настоящая заявка испрашивает приоритет на основании предварительной заявки на патент США № 60/862641, поданной 10/24/06, под названием “FRAME STRUCTURES FOR WIRELESS COMMUNICATION SYSTEMS”, и предварительной заявки на патент США № 60/862744, поданной 10/24/06, под названием “FRAME STRUCTURES FOR WIRELESS COMMUNICATION SYSTEMS”. Все эти заявки в полном объеме включены в настоящий документ путем ссылки.
Область техники, к которой относится изобретение
Нижеследующее описание относится, в общем, к беспроводной связи и, в частности, к структурам кадров для систем беспроводной связи.
Уровень техники
Системы беспроводной связи стали преобладающим средством осуществления связи друг с другом для большинства людей по всему миру. Устройства беспроводной связи стали меньшими в размерах и более мощными для удовлетворения нужд потребителей и улучшения портативности и удобства. Увеличение мощности обработки в мобильных устройствах, таких как сотовые телефоны, привело к увеличению мощностей, потребляемых в беспроводных сетевых системах передачи. Такие системы обычно обновляются не так легко, как сотовые устройства, которые связываются по ним друг с другом. Поскольку возможности мобильных устройств расширяются, может быть сложным поддерживать более старую беспроводную сетевую систему таким образом, чтобы облегчить полное использование новых и улучшенных возможностей беспроводных устройств.
Системы беспроводной связи обычно используют различные подходы для генерации ресурсов передачи в форме каналов. Эти системы могут быть системами мультиплексирования с кодовым разделением (CDM), системами мультиплексирования с частотным разделением (FDM) и системами мультиплексирования с временным разделением (TDM). Одним обычно используемым вариантом FDM является мультиплексирование с ортогональным частотным разделением (OFDM), которое эффективно разбивает полную системную полосу частот на множество ортогональных поднесущих. Эти поднесущие могут также называться тонами, элементами разрешения или частотными каналами. Каждая поднесущая может модулироваться данными. В способах, основанных на временном разделении, каждая поднесущая может содержать участок последовательных выделяемых промежутков времени или сегментов времени. Каждый пользователь может быть снабжен одним или несколькими комбинациями сегментов времени и поднесущих для передачи и приема информации в определенный период посылки или кадр. Схемами скачкообразного изменения (переключения каналов) обычно могут быть схема скачкообразного изменения скорости символов или схема блочного скачкообразного изменения.
Согласно способам, основанным на кодовом разделении, данные обычно передают на некотором количестве частот, доступных в любое время в некоторой полосе частот. Обычно данные оцифровываются и расширяются в доступной полосе частот, где множество пользователей могут совместно использовать этот канал, и соответствующим пользователям может быть назначен уникальный последовательный код. Пользователи могут вести передачу в одном и том же широкополосном участке спектра, где сигнал каждого пользователя расширяется по всей полосе частот посредством соответствующего ему уникального кода расширения. Этот способ может предусматривать коллективное использование, когда один или несколько пользователей могут вести передачу и прием одновременно. Такое коллективное использование может быть достигнуто через цифровую модуляцию широкополосного спектра (псевдослучайного сигнала), когда пользовательский поток битов кодируется и расширяется в очень широком канале псевдослучайным образом. Приемник проектируется для распознавания связанной уникальной кодовой последовательности и отмены рандомизации для накопления битов для конкретного пользователя когерентным образом.
Обычная сеть беспроводной связи (например, использующая методы частотного, временного и/или кодового разделения) включает в себя одну или несколько базовых станций, которые обеспечивают некоторую зону обслуживания, и один или несколько мобильных (например, беспроводных) терминалов, которые передают и принимают данные в этой зоне обслуживания. Обычная базовая станция может одновременно передавать множество потоков данных для служб широковещательной, групповой и/или одноадресной передачи, где потоком данных является поток данных, который может представлять независимый интерес для приема мобильным терминалом. Мобильный терминал в зоне обслуживания этой базовой станции может быть заинтересован в приеме одного, более одного или всех потоков данных, передаваемых от базовой станции. Подобным же образом, мобильный терминал может передавать данные к базовой станции или к другому мобильному терминалу. В этих системах полоса частот и другие системные ресурсы назначаются с использованием планировщика.
В случае использования больших полос частот канал часто становится дисперсным, и амплитудно-частотная характеристика изменяется по этой полосе частот.
Раскрытие изобретения
Ниже приведена упрощенная характеристика сущности изобретения для обеспечения базового понимания некоторых аспектов описанных вариантов осуществления. Это раскрытие изобретения не является расширенным обзором и не предназначено ни для определения ключевых или критических элементов, ни для описания объема таких вариантов осуществления. Его целью является представление некоторых понятий описанных вариантов осуществления в упрощенной форме в качестве вступления к более подробному описанию, которое представлено ниже.
В соответствии с одним или несколькими вариантами осуществления и соответствующим их описанием, различные аспекты описаны в сочетании со структурами суперкадров, которые могут обеспечить улучшенное выполнение обнаружения. Структуры суперкадров могут также обеспечить возможность эффективного определения гибких параметров, которые определяют структуру преамбулы. Структуры суперкадров могут также улучшить возможность быстрого поискового вызова для масштабирования с полосой частот.
Один из аспектов относится к способу передачи информации в системе беспроводной связи. Этот способ предусматривает генерацию первого пилот-сигнала обнаружения, который несет информацию определения системы, и передачу первого пилот-сигнала обнаружения к терминалам в системе беспроводной связи. Преамбула суперкадра может включать в себя первый пилот-сигнал обнаружения. Первый пилот-сигнал обнаружения может переноситься в преамбуле суперкадра.
Устройство беспроводной связи, которое включает в себя по меньшей мере один процессор и память, является еще одним аспектом. По меньшей мере один процессор выполнен с возможностью создания первого пилот-сигнала обнаружения, который несет информацию определения системы, и передачи первого пилот-сигнала обнаружения. Память связана по меньшей мере с одним этим процессором.
Другой аспект относится к устройству беспроводной связи, которое передает информацию преамбулы суперкадра. Устройство беспроводной связи включает в себя средство для генерации первого пилот-сигнала обнаружения, который несет информацию определения системы. Также в это устройство включено средство для передачи первого пилот-сигнала обнаружения. Первый пилот-сигнал обнаружения может переноситься в преамбуле суперкадра.
Компьютерный программный продукт, который включает в себя машиночитаемый носитель, является сопутствующим аспектом. Машиночитаемый носитель может включать в себя код, побуждающий по меньшей мере один компьютер создавать первый пилот-сигнал обнаружения, который несет информацию определения системы. Машиночитаемый носитель может также включать в себя код, побуждающий по меньшей мере один компьютер передавать первый пилот-сигнал обнаружения к терминалам в системе беспроводной связи. Первый пилот-сигнал обнаружения может переноситься в преамбуле суперкадра.
Другой аспект относится к устройству беспроводной связи, которое включает в себя процессор. Процессор может быть выполнен с возможностью генерации первого пилот-сигнала обнаружения, который несет информацию определения системы, и передачи первого пилот-сигнала обнаружения к терминалам в системе беспроводной связи. Имеется также память, связанная с этим процессором.
Сопутствующим аспектом является способ приема информации в среде беспроводной связи. Этот способ предусматривает детектирование первого пилот-сигнала обнаружения и использование первого пилот-сигнала обнаружения для получения информации определения системы. Первый пилот-сигнал обнаружения может включать в себя информацию определения системы.
Еще один аспект относится к устройству беспроводной связи, которое включает в себя по меньшей мере один процессор и память, связанную с упомянутым по меньшей мере одним процессором. Процессор может быть выполнен с возможностью детектирования первого пилот-сигнала обнаружения и использования первого пилот-сигнала обнаружения для получения информации определения системы. Первый пилот-сигнал обнаружения может переноситься в преамбуле суперкадра.
Устройство беспроводной связи, которое принимает информацию преамбулы суперкадра, является другим сопутствующим аспектом. Это устройство может включать в себя средство для использования первого пилот-сигнала обнаружения для получения информации определения системы.
Еще один аспект относится к компьютерному программному продукту, который включает в себя машиночитаемый носитель. Машиночитаемый носитель может включать в себя код, побуждающий по меньшей мере один компьютер обнаруживать первый пилот-сигнал обнаружения. Машиночитаемый носитель может также включать в себя код, побуждающий по меньшей мере один компьютер получать информацию определения системы путем анализа первого пилот-сигнала обнаружения. Первый пилот-сигнал обнаружения может указывать, используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты в суперкадре, или их комбинации.
Еще один аспект относится к устройству беспроводной связи, которое включает в себя процессор. Процессор может быть выполнен с возможностью детектирования первого пилот-сигнала обнаружения, который включает в себя информацию определения системы, и интерпретации определения системы, включенного в первый пилот-сигнал обнаружения. С этим процессором может быть связана память.
Для достижения вышеупомянутых и сопутствующих целей один или несколько вариантов осуществления содержат признаки, полностью описанные ниже и, в частности, указанные в формуле изобретения. Нижеследующее описание и сопровождающие чертежи подробно излагают некоторые иллюстративные аспекты и указывают лишь немногие способы из общего числа различных способов, в которых могут быть использованы принципы упомянутых вариантов осуществления. Другие преимущества и новые признаки будут очевидны из нижеследующего подробного описания при рассмотрении в сочетании с чертежами, и подразумевается, что описанные варианты осуществления включают в себя все такие аспекты и их эквиваленты.
Краткое описание чертежей
Фиг.1 иллюстрирует систему беспроводной связи множественного доступа, которая может использовать структуры кадров, описанные здесь.
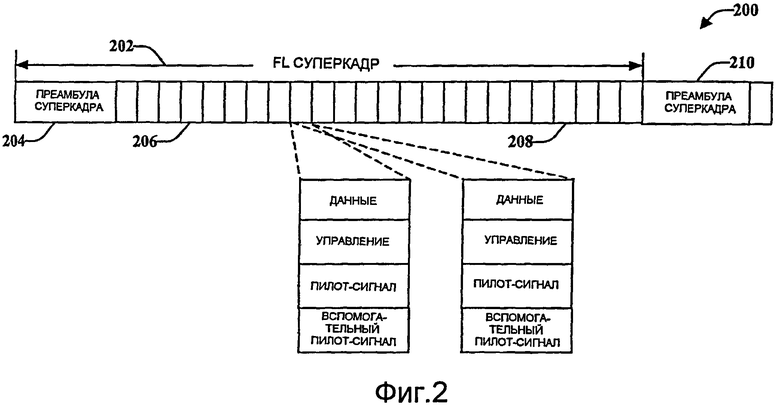
Фиг.2 иллюстрирует аспекты структур суперкадров для системы беспроводной связи дуплексного множественного доступа с частотным разделением (FDD).
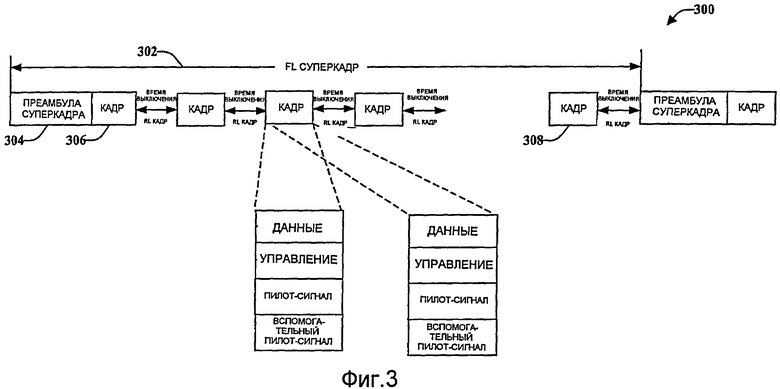
Фиг.3 иллюстрирует аспекты структур суперкадров для системы беспроводной связи дуплексного множественного доступа с разделением времени (TDD).
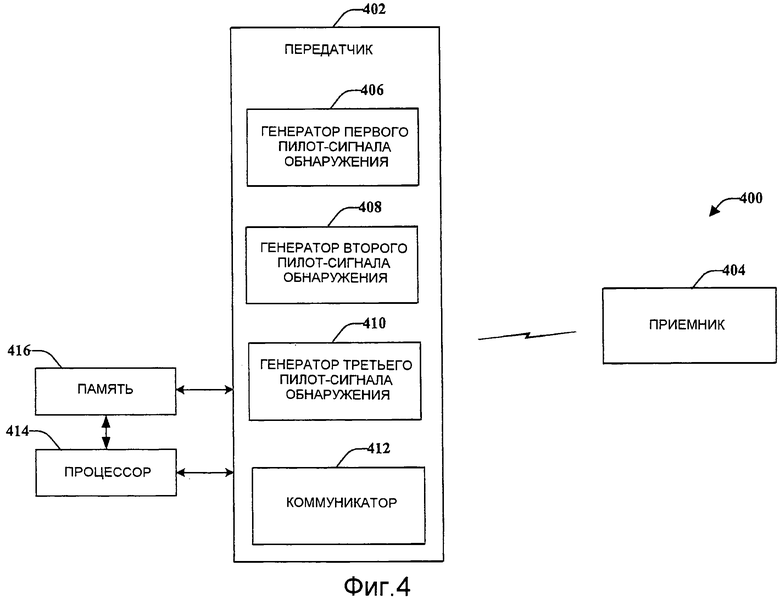
Фиг.4 иллюстрирует примерную систему, которая использует описанные структуры кадров для осуществления связи в среде беспроводной связи.
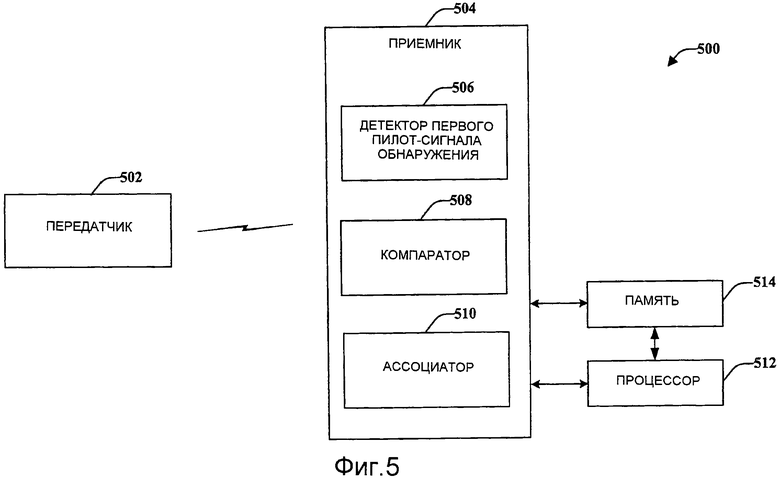
Фиг.5 иллюстрирует систему для приема описанных структур кадров для связи в среде беспроводной связи.
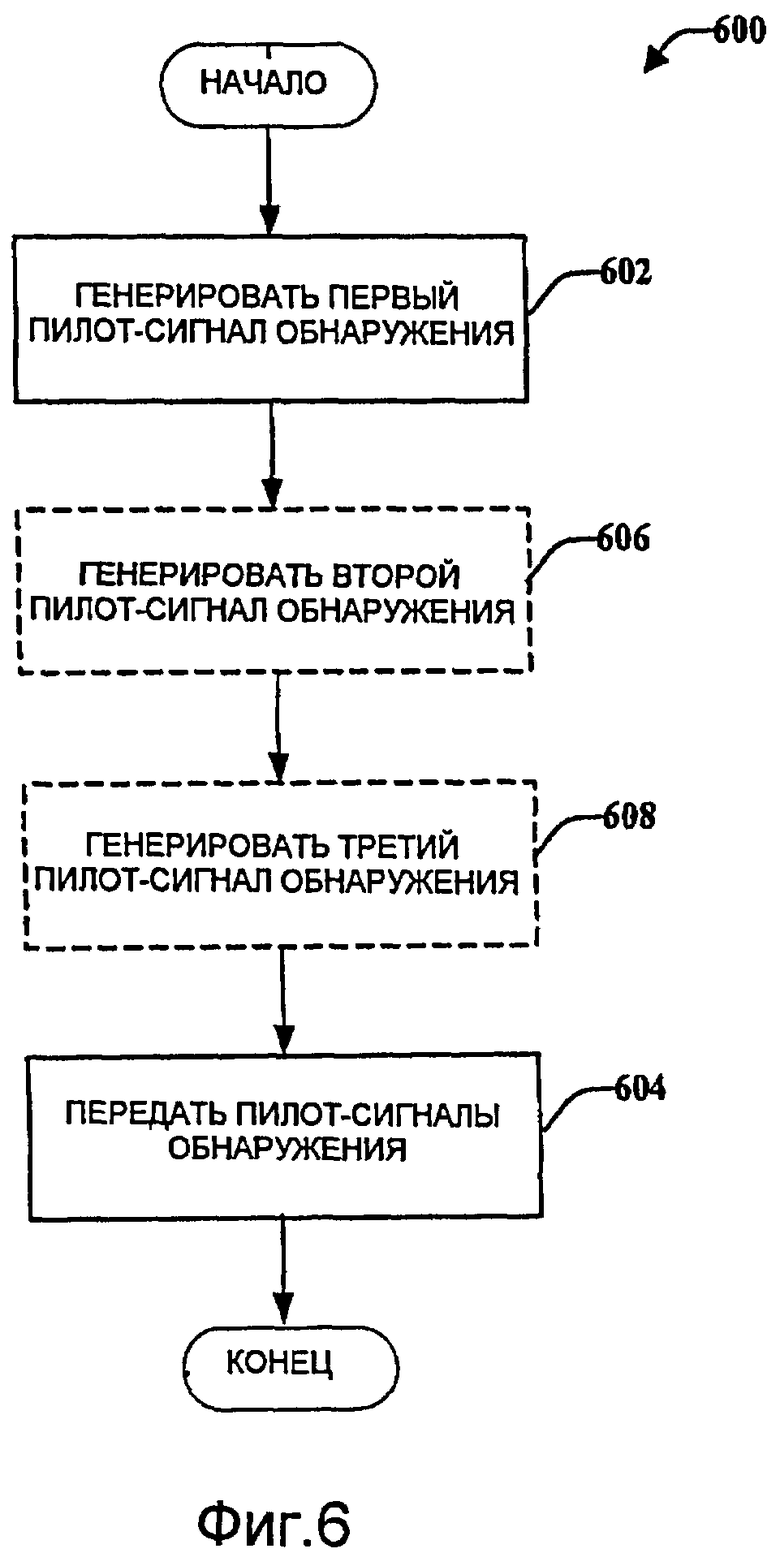
Фиг.6 иллюстрирует способ передачи информации в системе беспроводной связи.
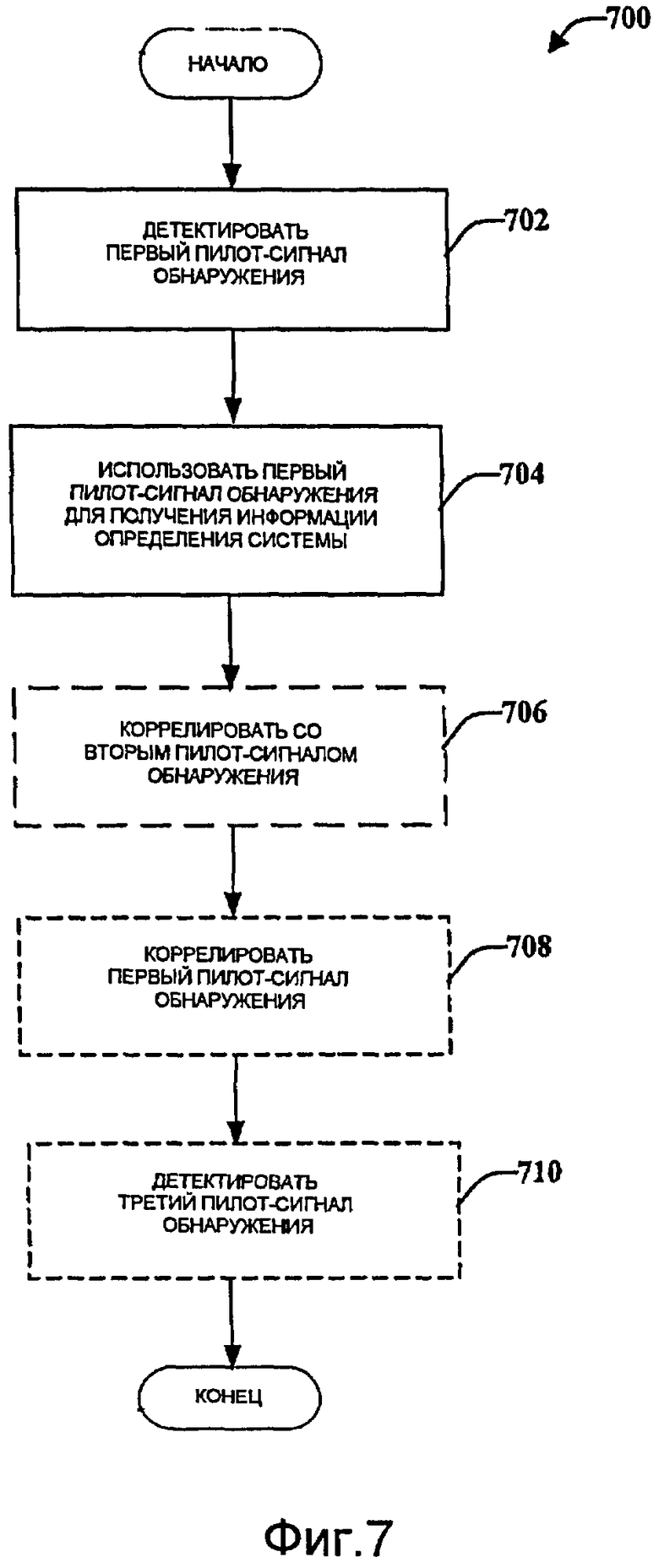
Фиг.7 иллюстрирует способ приема пилот-сигнала обнаружения, который включает в себя информацию определения системы.
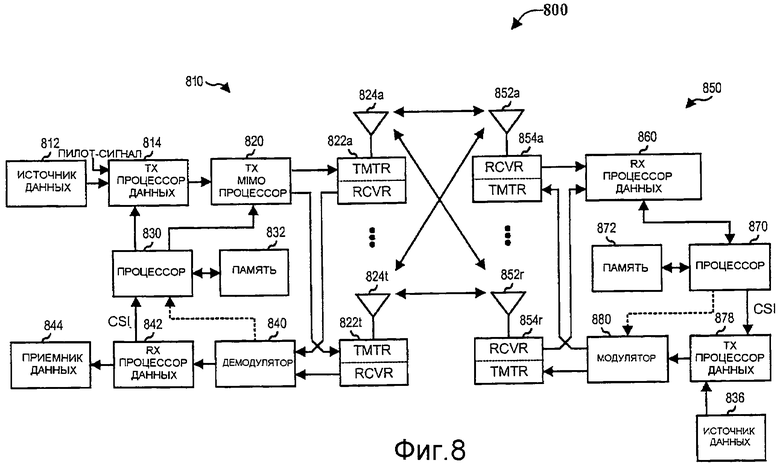
Фиг.8 иллюстрирует блок-схему варианта осуществления системы передатчиков и системы приемников.
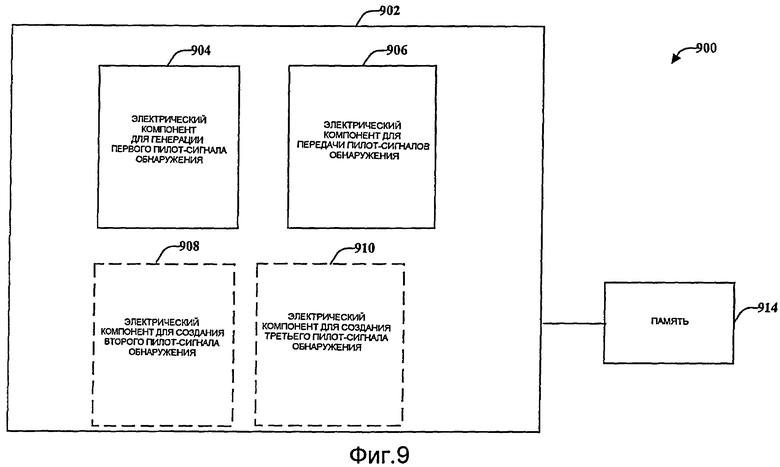
Фиг.9 иллюстрирует систему для передачи информации в среде беспроводной связи.
Фиг.10 иллюстрирует систему для приема информации в среде беспроводной связи.
Осуществление изобретения
Ниже будут описаны различные варианты осуществления со ссылкой на чертежи. В нижеследующем описании с целью пояснения приведены многочисленные конкретные подробности для обеспечения глубокого понимания одного или нескольких аспектов. Однако очевидно, что такой вариант (варианты) осуществления может быть осуществлен без этих конкретных подробностей. В других примерах хорошо известные структуры и устройства показаны в форме блок-схемы для облегчения описания этих вариантов осуществления.
Подразумевается, что используемые в настоящем документе термины «компонент», «модуль», «система» и тому подобные означают относящийся к компьютеру объект, представляющий собой аппаратное обеспечение, программно-аппаратные средства, комбинацию аппаратного и программного обеспечения, программное обеспечение или выполняемое программное обеспечение. Например, компонентом может быть, не ограничиваясь, процесс, выполняемый процессором, процессор, объект, выполняемый файл, поток выполнения, программа и/или компьютер. В качестве иллюстрации, как приложение, выполняемое на вычислительном устройстве, так и вычислительное устройство может быть компонентом. Один или несколько компонентов могут находиться в рамках процесса и/или потока выполнения, и компонент может быть локализован на одном компьютере и/или распределен между двумя или несколькими компьютерами. Кроме того, эти компоненты могут выполняться с различных машиночитаемых носителей, на которых сохранены различные структуры данных. Компоненты могут связываться посредством локальных и/или удаленных процессов, например, в соответствии с сигналом, имеющим один или несколько пакетов данных (например, данных от одного компонента, взаимодействующего с другим компонентом в локальной системе, распределенной системе и/или через сеть, такую как Интернет, с другими системами посредством этого сигнала).
Кроме того, различные варианты осуществления описаны здесь в отношении беспроводного терминала. Беспроводным терминалом может также называться система, абонентский блок, абонентская станция, мобильная станция, мобильное устройство, удаленная станция, удаленный терминал, терминал доступа, пользовательский терминал, терминал, устройство беспроводной связи, пользовательский агент, пользовательское устройство или пользовательское оборудование (UE). Беспроводным терминалом может быть сотовый телефон, беспроводной телефон, телефон протокола инициирования сеанса (SIP), станция беспроводного абонентского доступа (WLL), портативный персональный компьютер (PDA), портативное устройство с возможностями беспроводной связи, вычислительное устройство или другое обрабатывающее устройство, соединенное с беспроводным модемом. Кроме того, различные варианты осуществления описаны здесь в отношении базовой станции. Базовая станция может использоваться для связи с беспроводным терминалом (терминалами) и может также называться точкой доступа, Узлом В или определяться некоторыми другими терминами.
Различные аспекты или признаки будут представлены с точки зрения систем, которые могут включать в себя некоторое количество устройств, компонентов, модулей и т.п. Следует понимать, что различные системы могут включать в себя дополнительные устройства, компоненты, модули и/или могут не включать в себя все устройства, компоненты, модули, обсуждаемые со ссылкой на чертежи. Также может использоваться комбинация этих подходов.
Фиг.1 иллюстрирует систему 100 беспроводной связи множественного доступа, которая может использовать структуры кадров, описанные здесь. Более подробно, система 100 беспроводной связи множественного доступа включает в себя множество сот, например соты 102, 104 и 106. В варианте осуществления по фиг.1 каждая сота 102, 104 и 106 может включать в себя точку 108, 110, 112 доступа, которая включает в себя множество секторов. Множество секторов образованы группами антенн, каждая из которых отвечает за связь с терминалами доступа в некоторой части соты. В соте 102 каждая из групп 114, 116 и 118 антенн соответствует какому-либо отличающемуся сектору. В соте 104 каждая из групп 120, 122 и 124 антенн соответствует какому-либо отличающемуся сектору. В соте 106 каждая из групп 126, 128 и 130 антенн соответствует какому-либо отличающемуся сектору.
Каждая сота включает в себя несколько терминалов доступа, которые находятся в связи с одним или несколькими секторами каждой точки доступа. Например, терминалы 132, 134, 136 и 138 доступа находятся в связи с базовой станцией 108, терминалы 140, 142 и 144 доступа находятся в связи с точкой 110 доступа, а терминалы 146, 149 и 150 доступа находятся в связи с точкой 112 доступа.
Как показано в соте 104, например, каждый терминал 140, 142 и 144 доступа расположен в отличающейся части соответствующей ему соты, в отличие от каждого другого терминала доступа в той же самой соте. Далее, каждый терминал 140, 142 и 144 доступа может быть расположен на отличающемся расстоянии от соответствующих групп антенн, с которыми он связывается. Оба эти фактора, также из-за условий окружающей среды и других условий в этой соте, обеспечивают ситуации, вызывающие наличие отличающихся канальных условий между каждым терминалом доступа и соответствующей ему группой антенн, с которой он связывается.
Контроллер 152 связан с каждой из сот 102, 104 и 106. Контроллер 152 может содержать одно или несколько соединений с множеством сетей, таких как Интернет, другими основанными на пакетах сетями или голосовыми сетями с коммутацией каналов, которые обеспечивают информацию к терминалам доступа или от них при коммуникации с сотами системы 100 беспроводной связи множественного доступа. Контроллер 152 включает в себя планировщик или связан с планировщиком, который планирует передачу к терминалам доступа или от них. В некоторых вариантах осуществления планировщик может находиться в каждой индивидуальной соте, каждом секторе соты или их комбинации.
Каждый из секторов может работать с использованием одного или нескольких из множества несущих. Каждая несущая является частью большей полосы частот, в которой система может работать или доступна для связи. В одном секторе, использующем одну или несколько несущих, для множества терминалов доступа может быть запланирована каждая из различных несущих во время любого заданного интервала времени (например, кадра или суперкадра). Далее, для одного или нескольких терминалов доступа может быть запланировано множество несущих по существу в одно и то же время.
Для одного терминала доступа может быть запланирована одна несущая или более одной несущей согласно его возможностям. Эти возможности могут быть частью информации сеанса, которая генерируется, когда терминал доступа пытается получить связь, или которая была согласована ранее, могут быть частью информации идентификации, которая передается терминалом доступа, или может быть установлена согласно другим подходам. В некоторых аспектах информация сеанса может содержать устройство идентификации сеанса, которое генерируется путем запроса терминала доступа или определения его возможностей через его передачи.
Далее, в некоторых аспектах пилот-сигналы обнаружения, которые могут быть включены в преамбулу суперкадра, могут быть обеспечены только на одной несущей или части одной несущей для любого заданного суперкадра. В других аспектах только части преамбулы суперкадра (например, пилот-сигналы или пилот-сигналы обнаружения) могли бы иметь ширину полосы, меньшую, чем несущая, хотя другие части преамбулы суперкадра имеют большую ширину полосы.
Как используется здесь, точкой доступа может быть фиксированная станция, используемая для связи с терминалами, и может также называться базовой станцией, Узлом В или определяться некоторыми другими терминами и включать в себя какую-либо или всю их функциональность. Терминал доступа может также называться пользовательским оборудованием (UE), устройством беспроводной связи, терминалом, мобильной станцией или определяться некоторыми другими терминами и включать в себя какую-либо или всю их функциональность.
Следует отметить, что хотя фиг.1 изображает физические секторы (например, имеющие различные группы антенн для различных секторов), могут использоваться и другие подходы. Например, множество фиксированных «лепестков», каждый из которых охватывает различные области соты в частотном пространстве, могут использоваться вместо физических секторов или в комбинации с ними.
Для полного понимания описанных аспектов будут описаны структуры суперкадров для систем беспроводной связи множественного доступа. Фиг.2 иллюстрирует аспекты структур 200 суперкадров для системы беспроводной связи дуплексного множественного доступа с частотным разделением (FDD). Фиг.3 иллюстрирует аспекты структур 300 суперкадров для системы беспроводной связи дуплексного множественного доступа с временным разделением (TDD). В некоторых аспектах преамбула суперкадра или ее части могут охватывать одну несущую или менее одной несущей. Далее, в некоторых аспектах центральной поднесущей заданной несущей может быть центральная поднесущая, или по существу центральная поднесущая, преамбулы суперкадра.
Передача прямой линии связи разделена на блоки суперкадров 202, 302, которые могут включать в себя преамбулу 204, 304 суперкадра, за которой следует группа кадров физического уровня, некоторые из которых обозначены как 206, 208, 306 и 308. В FDD системе 200 передача обратной линии связи и прямой линии связи может занимать различные полосы частот таким образом, что передачи на этих линиях связи не перекрываются, или в значительной мере не перекрываются на любых частотных поднесущих. В TDD системе 300 N кадров прямой линии связи и М кадров обратной линии связи определяют число последовательных кадров прямой линии связи и обратной линии связи, которое может быть непрерывно передано, прежде чем будет допускаться передачей кадров противоположного типа. Следует отметить, что число N и М может варьироваться в данном суперкадре или между суперкадрами.
В некоторых вариантах осуществления преамбула 204, 304 суперкадра включает в себя пилот-сигналы обнаружения, которые могут облегчить получение терминалом достаточной информации для подключения к системе беспроводной связи и ее использования. Преамбула может также включать в себя один или несколько следующих каналов управления: основной канал управления передачей прямой линии связи (F-PBCCH), вспомогательный канал управления передачей прямой линии связи (F-SBCCH) и прямой канал быстрого поискового вызова (F-QPCH). Эти каналы управления несут информацию конфигурации для формы волны прямой линии связи и/или информацию быстрого поискового вызова для пользователей в неактивном режиме. Кадры физического уровня могут нести данные и другие каналы управления, чем каналы управления, переносимые преамбулой 204, 304.
Кроме того, пилот-канал может включать в себя пилот-сигналы, которые могут использоваться для оценки канала терминалами доступа, и/или канал передачи, который включает в себя информацию конфигурации, которую может использовать терминал доступа для демодуляции информации, содержащейся в кадре прямой линии связи. Дополнительная информация обнаружения, такая как хронирование и другая информация, достаточная для терминала доступа, чтобы осуществлять связь на одной из несущих и базовое управление мощностью, или информация смещения может быть также включена в преамбулу 204, 304 суперкадра. В других случаях, только некоторое из вышеуказанного и/или другая информация может быть включена в преамбулу 204, 304 суперкадра. Кроме того, взаимные помехи сектора и информация поискового вызова может переноситься в преамбуле 204, 304 суперкадра. Структура преамбулы 204, 304 суперкадра и продолжительность времени между преамбулами суперкадров (например, между преамбулой 204 и преамбулой 210) зависят от одного или нескольких гибких параметров.
Ширина полосы системы может включать в себя размер быстрого преобразования Фурье (FFT) и одну или несколько защитных поднесущих. В одном аспекте информация поискового вызова может занимать множество сегментов фиксированной ширины полосы в зависимости от размещения.
Структура преамбулы может содержать подобное число битов в F-QPCH для всех назначений ширины полосы и могла бы поддерживать один и тот же запас линий связи для всех назначений ширины полосы. Для назначений, которые не ограничены мощностью, производительность поискового вызова может быть масштабирована согласно ширине полосы. Число сегментов F-QPCH может сигнализироваться посредством бита в F-PBCCH. Например, канал поискового вызова может занимать множество сегментов конкретной ширины полосы (например, 5 МГц каждый), таким образом, k сегментов могут быть допустимы, когда используемая ширина полосы составляет по меньшей мере (512·k-128) поднесущих. Таким образом, в одном аспекте размещение 10 МГц может иметь два сегмента F-QPCH, размещение 15 МГц может иметь три сегмента F-QPCH и так далее. Число сегментов поискового вызова может сигнализироваться посредством бита в канале передачи или с помощью других средств. Ни один из сегментов не требуется центрировать на средней частоте несущей. Кроме того, широковещательная передача или другая информация должна определять точную границу, при которой разрешен переход. В соответствии с некоторыми аспектами, F-PBCCH может повторяться в каждом сегменте F-QPCH. Выбор 128 поднесущих с защитой соответствует DO размещению трех несущих в 5 МГц.
В соответствии с некоторыми аспектами ширина полосы пилот-сигнала обнаружения ограничена 512 поднесущими и центрирована на средней частоте несущей или около нее. В одном аспекте ширина полосы обнаружения фиксирована и не изменяется (например, нет скачкообразного изменения преамбулы). Это может обеспечить выгоду упрощения операции поиска и ускорения времени обнаружения, так как поисковое устройство (например, терминал) может искать в одном и том же местоположении в каждом суперкадре. Далее, в некоторых аспектах, пилот-сигналы обнаружения фиксированной ширины полосы и местоположения ширины полосы, с точки зрения поднесущих, могут использоваться для переадресации вызова и управления активным множеством для обеспечения точного отношения несущей к помехе (C/I), или подобной оценки (например, отношения сигнал-шум (SNR), отношения сигнала к помехе плюс шум (SINR), помех и т.д.), которая может использоваться для этих целей терминалами доступа.
Следует отметить в вышеупомянутом аспекте, что нет преамбулы со скачкообразным изменением. В схеме преамбулы со скачкообразным изменением взаимная помеха, наблюдаемая каждым сектором, варьируется от суперкадра к суперкадру. Поскольку эффективность обнаружения в 5 МГц имеет высокое качество, любые улучшения, обусловленные скачкообразным изменением, сводятся на нет потерями в управлении переадресацией вызова и в выполнении определения системы. Таким образом, вышеуказанный аспект не использует скачкообразное изменение преамбулы.
В другом аспекте циклический префикс, используемый для символов в преамбуле суперкадра, или только пилот-сигнал обнаружения, может быть тем же самым, что и циклический префикс, используемый для символов в индивидуальных кадрах. В одном аспекте терминал доступа может определить длину циклического префикса из циклического префикса или посредством декодирования второго из трех пилот-сигналов обнаружения. Это допускает общесистемную дисперсию в длине циклического префикса в одной или нескольких частях заданного размещения. Циклический префикс может переноситься в пилот-сигнале обнаружения, и, таким образом, его ограничение постоянным значением не является необходимым.
Как показано на фиг.2 и 3, за преамбулой 204, 304 суперкадра следует последовательность кадров. Каждый кадр может включать в себя то же самое или отличающееся количество OFDM символов, которые могут включать в себя некоторое количество поднесущих, которые могут одновременно использоваться для передачи в какой-либо заданный период. Далее, каждый кадр может работать согласно режиму скачкообразного изменения скорости символов, когда один или несколько несмежных OFDM символов назначены пользователю на прямой линии связи или обратной линии связи, или режиму блочного скачкообразного изменения, когда пользователи осуществляют скачкообразное изменение в блоке OFDM символов. Действительные блоки или OFDM символы могут скачкообразно изменяться или не изменяться между кадрами.
В соответствии с некоторыми аспектами F-PBCCH и F-SBCCH могут переноситься в первых пяти OFDM символах. F-PBCCH переносится во всех суперкадрах, тогда как F-SBCCH и F-QPCH чередуются друг с другом. Например, F-SBCCH переносится в нечетных суперкадрах, а F-QPCH переносится в четных суперкадрах. Таким образом, F-SBCCH и F-QPCH чередуются. F-PBCCH, F-SBCCH и F-QPCH совместно используют общий пилот-сигнал как в нечетных, так и четных суперкадрах. F-SBCCH и F-QPCH могут быть закодированы на единственном суперкадре. F-PBCCH совместно закодирован на шестнадцати суперкадрах, так как F-PBCCH несет статическую информацию по всему размещению (например, информацию, которая является общей от сектора к сектору).
Кроме того, эта структура может быть различной для синхронных и асинхронных систем. В асинхронных системах однородные суперкадры скремблированы с использованием PilotPN сектора, а в синхронных системах они скремблированы с использованием PilotPhase. PilotPN является 9-битовым идентификатором сектора, используемым в UMB (Ультрамобильная широкая полоса). PilotPhase задается выражением PilotPN+индекс суперкадра mod 512 (PilotPhase изменяется на каждый суперкадр). Однородные суперкадры могут быть скремблированы с использованием SFNID для возможности осуществления операции быстрого поискового вызова сети с единственной частотой (SFN). В некоторых аспектах SFNID может быть равным PilotPN. Секторы, участвующие в SFN, передают одну и ту же форму сигнала и, следовательно, представляются как единственный сектор, передающий сигнал с более высокой энергией к терминалу, принимающему эту форму сигнала. Этот способ может ослаблять помехи, вызываемые одним сектором для другого сектора, и может привести к увеличенной принимаемой энергии в терминале. SFN операция между какой-либо группой секторов (например, секторов одной и той же соты) может быть выполнена посредством назначения одного и того же SFNID этим секторам.
В соответствии с некоторыми аспектами F-PBCCH может занимать первый OFDM символ в преамбуле суперкадра, a F-SBCCH/F-QPCH может занимать следующие четыре OFDM символа. Введение значения ширины полосы в один OFDM символ для РВССН может обеспечить адекватный выигрыш обработки даже в размещении низкой ширины полосы (например, 1,25 МГц). Дополнительным преимуществом может быть то, что терминалы в неактивном режиме могут использовать этот OFDM символ для сходимости автоматической регулировки усиления (AGC). Например, это может обеспечить то, что отсутствует или имеет место незначительное ухудшение в эффективности F-QPCH. Это возможно, так как F-PBCCH несет специфическую для размещения информацию, которая уже известна терминалу в неактивном режиме. Следовательно, этому терминалу не требуется демодулировать этот OFDM символ, и он может вместо этого использовать принятую энергию во время периода этого символа как опору для установки его посредством автоматической регулировки усиления (AGC) и продолжительность времени этого OFDM символа как защитное время для обеспечения возможности сходимости AGC.
Структура преамбулы суперкадра может включать в себя восемь OFDM символов, первые пять символов могут использоваться для переноса каналов управления, а последние три символа могут нести пилот-сигнал обнаружения. Пилот-сигнал обнаружения в преамбуле суперкадра может содержать три пилот-сигнала, которые разделены по времени, частоте, или по времени и частоте. Дополнительная информация, касающаяся пилот-сигналов, содержащихся в преамбуле суперкадра, будет обсуждаться ниже.
Фиг.4 иллюстрирует примерную систему 400, которая использует описанные структуры кадров для связи в среде беспроводной связи. Система 400 может быть выполнена с возможностью модификации преамбулы суперкадра, которая может включать в себя информацию определения системы. Система 400 включает в себя передатчик 402, который осуществляет беспроводную связь с приемником 404. Передатчиком 402 может быть, например, базовая станция, а приемником 404 может быть устройство связи. Понятно, что система 400 может включать в себя один или более передатчиков 402 и один или более приемников 404. Однако для простоты показаны только один приемник и только один передатчик.
Для передачи информации к приемнику 404 передатчик 402 включает в себя генератор 406 первого пилот-сигнала обнаружения, который может быть выполнен с возможностью создания первого пилот-сигнала обнаружения. В соответствии с некоторыми аспектами первый пилот-сигнал обнаружения называется TDM3. В соответствии с.некоторыми аспектами, первый пилот-сигнал обнаружения ортогонализируется кодом Уолша, который несет информацию определения системы. В соответствии с некоторыми аспектами первый пилот-сигнал обнаружения может быть дополнительно скремблирован посредством содержимого второго пилот-сигнала обнаружения для отличения различных секторов друг от друга. В некоторых аспектах система 400 может использовать это отличие для дифференциальной передачи прямой линии связи информационного сигнала другого сектора (F-OSICH), который может быть также частью преамбулы суперкадра и использоваться приемником 404 для определения сектора, для которого применяется OSICH информация.
Первый пилот-сигнал обнаружения может нести девять битов информации. В одном аспекте первый пилот-сигнал обнаружения может включать в себя один бит, указывающий, является ли этот сектор или точка доступа частью синхронного или асинхронного размещения, два бита могут указывать длительность циклического префикса, один бит для указания возможности полудуплексной работы, и четыре бита могут использоваться для указания младших битов (LSB) системного времени в асинхронном размещении. Эти четыре бита могут использоваться для определения суперкадра, в котором начинается передача вещания, и/или для определения суперкадра, в котором переносится расширенная информация канала (ECI). В одном аспекте ECI несет информацию конфигурации обратной линии связи, а также все биты системного времени. В других аспектах эти четыре бита могут также использоваться для случайной информации для алгоритмов, подобных переключению/скремблированию, которые выполняются в приемнике 404 (например, терминале доступа).
В аспекте синхронного размещения LSB могут использоваться для переноса числовой информации TDD (например, разделения между прямой и обратной линиями связи). Далее, одно значение этих четырех битов может быть зарезервировано для указания FDD работы. В некоторых аспектах один бит может использоваться для указания повторного использования частоты на каналах суперкадра (например, использование множества точек доступа или секторов одной и той же полосы частот). В другом аспекте, для случая проектирования FFT на 5 МГц, один или несколько битов могут приближенно определять число используемых защитных несущих.
Также в передатчик 402 включен генератор 408 второго пилот-сигнала обнаружения, который может быть выполнен с возможностью создания второго пилот-сигнала обнаружения. В соответствии с некоторыми аспектами второй пилот-сигнал обнаружения может называться TDM2. В одном аспекте второй пилот-сигнал обнаружения ортогонализирован кодом Уолша, который зависит от PilotPN в случае асинхронных секторов и от PilotPhase в случае синхронных секторов. В одном аспекте фазовый сдвиг может быть определен как PilotPN+SuperframeIndex mod 512. PilotPhase используется в синхронных секторах для возможности осуществления изменения пилот-сигналов обнаружения от суперкадра к суперкадру, что дает выигрыш обработки по суперкадрам.
Передатчик 402 может также включать в себя генератор 410 третьего пилот-сигнала обнаружения, который может быть выполнен с возможностью создания третьего пилот-сигнала обнаружения. В соответствии с некоторыми аспектами третий пилот-сигнал обнаружения может называться TDM1. В одном аспекте третий пилот-сигнал обнаружения несет уникальную последовательность, которая может быть независимой от PilotPN. В некоторых аспектах полоса частот, охватываемая третьим пилот-сигналом обнаружения, составляет 5 МГц поднесущих. В некоторых аспектах третий пилот-сигнал обнаружения для полос частот ниже, чем 5 МГц, может быть сгенерирован посредством обнуления некоторых несущих с защитой для получения соответствующей полосы частот. В одном аспекте третий пилот-сигнал обнаружения может использоваться для обнаружения.
В соответствии с некоторыми аспектами, последовательность третьего пилот-сигнала обнаружения может быть независимой от идентификатора сектора, но может зависеть от нескольких битов системной информации (например, размера FFT, используемого системой, и длины циклического префикса, используемой системой). В некоторых аспектах для передачи третьего пилот-сигнала обнаружения могут использоваться двенадцать различных последовательностей. В других аспектах последовательность третьего пилот-сигнала обнаружения может быть уникальной (например, никакие информационные биты не передаются с использованием этой последовательности). Это может уменьшить сложность обнаружения, так как корреляция с каждой из последовательностей третьего пилот-сигнала обнаружения в реальном времени может составлять доминирующую сложность в процессе обнаружения.
Третий пилот-сигнал обнаружения, в соответствии с некоторыми аспектами, несет пилот-сигнал синхронизации по времени/частоте, который может быть независимым от PilotPN. Четыре GCL последовательности могут использоваться для определения длительности циклического префикса (СР). GCL последовательности могут быть основаны на размере FFT в 128, 256 или 512 тонов. Форма сигнала для размеров FFT, больших, чем 512 тонов, является той же самой, что и для 512 тонов. GCL последовательности могут отображаться на каждую N-ую поднесущую, где N больше, чем 1, для обеспечения N повторений во временной области. Эти повторения могут использоваться для начального детектирования этой последовательности и/или для частотной коррекции.
Следует отметить, что первый, второй и третий пилот-сигнал обнаружения необязательно являются OFDM символами в преамбуле суперкадра. Однако в соответствии с некоторыми аспектами первый, второй и третий пилот-сигналы обнаружения могут быть последовательными OFDM символами. Эти пилот-сигналы обнаружения могут содержать любое множество последовательностей, включающих в себя, но не ограниченных этим, ортогональные последовательности. GCL последовательности третьего пилот-сигнала обнаружения могли бы не быть ортогональными относительно друг друга.
Передатчик 402 также включает в себя коммуникатор 412, который может быть выполнен с возможностью посылки первого (TDM3), второго (TDM2) и третьего (TDM1) пилот-сигналов обнаружения к приемнику 404. В соответствии с некоторыми аспектами первый, второй и/или третий пилот-сигналы обнаружения могут переноситься в преамбуле суперкадра. Приемник 404 может использовать эту информацию для повышения эффективности обнаружения.
Система 400 может включать в себя процессор 414, оперативно связанный с передатчиком 402 (и/или памятью 416) для выполнения команд, относящихся к генерации пилот-сигналов обнаружения и посылки пилот-сигналов обнаружения к приемнику 404. Пилот-сигналы обнаружения могут переноситься в преамбуле суперкадра. Процессор 414 может также выполнять команды, относящиеся к включению пилот-сигналов обнаружения в преамбулу суперкадра. Процессором 414 может также быть процессор, который управляет одним или несколькими компонентами системы 400, и/или процессор, который как анализирует, так и генерирует информацию, принимаемую от передатчика 402, и управляет одним или несколькими компонентами системы 400.
Память 416 может хранить информацию, относящуюся к пилот-сигналам обнаружения и/или преамбулам суперкадров, генерируемым процессором 414, и другую информацию, относящуюся к передаче информации в сети беспроводной связи. Память 416 может дополнительно хранить протоколы, связанные с выполнением действий по управлению связью между передатчиком 402 и приемником 404 таким образом, что система 400 может использовать хранимые протоколы и/или алгоритмы для реализации различных аспектов, описанных здесь.
Следует понимать, что компонентами устройств хранения данных (например, запоминающих устройств), описанных здесь, может быть либо энергозависимая память, либо энергонезависимая память, или запоминающие устройства могут включать в себя как энергозависимую, так и энергонезависимую память. В качестве примера, а не ограничения, энергонезависимая память может включать в себя ПЗУ (ROM), программируемое ПЗУ (PROM), электрически программируемое ПЗУ (EPROM), электрически стираемое ПЗУ (EEPROM) или флэш-память. Энергозависимая память может включать в себя ЗУПВ (RAM), которое действует как внешняя кэшпамять. В качестве примера, а не ограничения, RAM доступна во многих формах, таких как синхронная RAM (SRAM), динамическая RAM (DRAM), синхронная DRAM (SDRAM), SDRAM с удвоенной скоростью передачи данных (DDR SDRAM), усовершенствованная SDRAM (ESDRAM), DRAM с синхронной линией связи (SLDRAM) и прямая Rambus RAM (DRRAM). Память 416 описанных вариантов осуществления предназначена содержать, не ограничиваясь, эти и другие подходящие типы памяти.
Фиг.5 иллюстрирует систему 500 для приема описанных структур кадров для связи в среде беспроводной связи. Система 500 может быть выполнена с возможностью приема преамбулы суперкадра, которая включает в себя информацию определения системы. Система 500 может включать в себя один или несколько передатчиков 502 в беспроводной связи с одним или несколькими приемниками 504.
Приемник 504 может включать в себя детектор 506 первого пилот-сигнала обнаружения, который может быть выполнен с возможностью обнаружения первого пилот-сигнала обнаружения (TDM3). Первый пилот-сигнал обнаружения может включать в себя информацию определения системы. Например, информация определения системы может указывать, используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты, или их комбинация. Первый пилот-сигнал обнаружения может переноситься в преамбуле суперкадра, которая включает в себя по меньшей мере три OFDM символа.
Также в приемник 504 включен компаратор 508, который может быть выполнен с возможностью коррелирования второго пилот-сигнала обнаружения TDM2 с использованием гипотезы секторов. Компаратор 508 может коррелировать со всеми гипотезами секторов с использованием быстрого преобразования Адамара (FHT). В соответствии с некоторыми аспектами, из-за повторения символов, различные временные гипотезы могут использоваться для 1,25 МГц и 2,5 МГц FFT.
Ассоциатор 510 может быть выполнен с возможностью коррелирования первого пилот-сигнала обнаружения (TDM3) с использованием информации, включенной во второй пилот-сигнал обнаружения. Ассоциатор 510 может сначала дескремблировать TDM3 с использованием PilotPN (например, асинхронно) или PilotPhase (например, синхронно), включенные в TDM2. Информация, переносимая на TDM3, может улучшить демодуляцию F-PBCCH и F-SBCCH, которые могут нести информацию конфигурации, которая способствует демодуляции данных прямой линии связи приемником 504. Например, каждый F-PBCCH несет размер FFT и число защитных поднесущих. F-PBCCH может также нести девять LSB системного времени для возможности осуществления преобразования приемником 504 PilotPhase в PilotPN для синхронных систем.
В соответствии с некоторыми аспектами приемник 504 может быть дополнительно выполнен с возможностью детектирования третьего пилот-сигнала обнаружения (TDM1) в полосе частот 1,25 МГц. Поскольку эта полоса частот может быть одной из 5 МГц, 2,5 МГц или 1,25 МГц, использование минимально поддерживаемой полосы частот (1,25 МГц) для обнаружения TDM1 может обеспечить то, что не обнаруживается никакая внеполосная помеха. В соответствии с некоторыми аспектами TDM1 формы сигнала для всех полос частот оказываются идентичными на интервале этой частоты (1,25 МГц). В соответствии с другими аспектами различные последовательности могут использоваться для TDM1 в зависимости от полосы частот. В некоторых аспектах, когда имеется три различных последовательности для полосы частот и четыре различных последовательности для размера FFT, приемник может коррелировать с двенадцатью различными последовательностями.
Система 500 может включать в себя процессор 512, оперативно связанный с приемником 504 (и/или памятью 514), для выполнения команд, относящихся к обнаружению первого пилот-сигнала обнаружения, коррелирования второго пилот-сигнала обнаружения с первым пилот-сигналом обнаружения и коррелирования третьего пилот-сигнала обнаружения с использованием информации, включенной во второй пилот-сигнал обнаружения. Процессором 512 может также быть процессор, который управляет одним или несколькими компонентами системы 500, и/или процессор, который как анализирует, так и генерирует информацию, полученную приемником 504, и управляет одним или несколькими компонентами системы 500.
Память 514 может хранить информацию, относящуюся к обнаружению пилот-сигналов обнаружения и/или коррелированию пилот-сигналов обнаружения, генерируемых процессором 512, и другую соответствующую информацию, относящуюся к передаче информации в сети беспроводной связи. Память 514 может дополнительно хранить протоколы, связанные с выполнением действий по управлению связью между передатчиком 502 и приемником 504 таким образом, что система 500 может использовать хранимые протоколы и/или алгоритмы для реализации различных аспектов, описанных здесь.
Ввиду примерных систем, показанных и описанных выше, способы, которые могут быть реализованы в соответствии с описанным предметом рассмотрения, будут лучше поняты со ссылкой на блок-схемы фиг.6 и 7. Хотя, с целью простоты объяснения, эти способы показаны и описаны как группа блоков, следует понимать, что заявленное изобретение не ограничено этим числом или порядком блоков, так как определенные блоки могут встречаться и в других порядках и/или параллельно с другими блоками из того, что изображено и описано здесь. Кроме того, не все иллюстрированные блоки могут быть необходимы для реализации способов, описанных далее. Следует понимать, что функциональность, связанная с блоками, может быть реализована посредством программного обеспечения, аппаратного обеспечения, их комбинации или другими подходящими средствами (например, устройством, системой, процессом, компонентом). Кроме того, следует далее понимать, что способы, описанные далее и по всему этому описанию, способны храниться на изделии производства для улучшения транспортировки и переноса таких способов к различным устройствам. Специалистам в данной области техники будет ясно, что способ мог бы быть альтернативно представлен как группа взаимосвязанных состояний или событий, как, например, в диаграмме состояния.
На фиг.6 показан способ 600 передачи информации в системе беспроводной связи. Передаваемая информация может включать в себя пилот-сигналы обнаружения, которые могут обеспечить повышение эффективности обнаружения. Пилот-сигналы обнаружения могут также дать возможность осуществления эффективного определения гибких параметров, которые определяют структуру преамбулы. Пилот-сигналы обнаружения могут также улучшить возможность быстрого поискового вызова для масштабирования в зависимости от полосы частот.
Способ 600 начинается на этапе 602, когда генерируется первый пилот-сигнал обнаружения. Первый пилот-сигнал обнаружения может быть назван TDM3. В соответствии с некоторыми аспектами, первый пилот-сигнал обнаружения несет информацию определения системы. Первый пилот-сигнал обнаружения может указывать длину циклического префикса, используемую в переданных данных, используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты, или их комбинация. На этапе 604 первый пилот-сигнал обнаружения передается к терминалам в среде беспроводной связи.
В соответствии с некоторыми аспектами, может быть создан и передан второй и/или третий пилот-сигнал обнаружения. В одном аспекте на этапе 606 генерируется второй пилот-сигнал обнаружения, который может быть назван TDM2. Второй пилот-сигнал обнаружения может включать в себя последовательность, которая зависит от идентификатора сектора. Второй пилот-сигнал обнаружения может быть сгенерирован с использованием одного или нескольких аспектов, описанных выше. Первый пилот-сигнал обнаружения может быть скремблирован посредством содержимого второго пилот-сигнала обнаружения для различения различных секторов.
На этапе 608 генерируется третий пилот-сигнал обнаружения (иногда называемый TDM1). Третий пилот-сигнал обнаружения может включать в себя последовательность, которая зависит от рабочей полосы частот и циклического префикса. Третий пилот-сигнал обнаружения может нести уникальную последовательность и может быть сгенерирован с использованием одного или нескольких вышеописанных аспектов.
На этапе 604 передается любая комбинация первого, второго или третьего пилот-сигнала обнаружения. В соответствии с некоторыми аспектами первый, второй или третий пилот-сигнал обнаружения переносятся в преамбуле суперкадра. Пилот-сигналами обнаружения могут быть последовательные OFDM символы или непоследовательные OFDM символы.
В соответствии с некоторыми аспектами ортогональные последовательности пилот-сигналов обнаружения являются различными. В некоторых аспектах ортогональная последовательность является различной для второго (TDM2) и первого (TDM3) пилот-сигналов обнаружения, основанных на коде Уолша. В некоторых аспектах эти три пилот-сигнала обнаружения содержат любое множество последовательностей и не ограничены ортогональными последовательностями. Дополнительно или альтернативно, центральная поднесущая пилот-сигналов обнаружения является приближенно центральной поднесущей пилот-сигналов обнаружения.
Фиг.7 иллюстрирует способ 700 приема пилот-сигнала обнаружения, который включает в себя информацию определения системы. На этапе 702 терминал доступа пытается детектировать первый пилот-сигнал обнаружения (TDM3). Первый пилот-сигнал обнаружения может включать в себя информацию определения системы. Например, информация определения системы может указывать, используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты, или их комбинация. Первый пилот-сигнал обнаружения может переноситься в преамбуле суперкадра, которая включает в себя по меньшей мере три OFDM символа. На этапе 704 информация, включенная в первый пилот-сигнал обнаружения, используется для получения информации определения системы.
В соответствии с некоторыми аспектами способ 700 также включает в себя коррелирование второго пилот-сигнала обнаружения, на этапе 706, с использованием различных гипотез секторов. Второй пилот-сигнал обнаружения может быть назван TDM2. В одном аспекте терминал доступа может эффективно коррелировать со всеми гипотезами секторов с использованием FHT. В некоторых аспектах TDM2 может использоваться посредством включения повторения символов для различных размеров размещений полос частот или размеров FFT (например, 1,25 МГц и 2,5 МГц FFT).
С использованием информации TDM2 терминал доступа коррелирует с TDM3 (первый пилот-сигнал обнаружения) на этапе 708 с использованием FHT или другого подхода. В одном аспекте это может быть улучшено путем дескремблирования TDM3 с использованием PN последовательности или фазового скремблирования, используемого на TDM2. Обычно информация, переносимая на TDM3, используется для демодуляции вещания, управления мощностью и других каналов (например, F-PBCCH и F-SBCCH). Эти каналы несут информацию конфигурации, которая позволяет терминалу демодулировать данные прямой линии связи (например, F-PBCCH несет точный FFT размер и число поднесущих с защитой размещения, или которые в настоящее время используются). В одном аспекте F-PBCCH может также нести девять LSB системного времени для возможности осуществления терминалом преобразования PilotPhase в PilotPN для синхронных систем.
В соответствии с некоторыми аспектами способ 700 продолжается на этапе 710, когда детектируется третий пилот-сигнал обнаружения. Этот третий пилот-сигнал обнаружения может быть назван TDM1. Детектирование может осуществляться в части полосы частот или по существу во всей полосе частот. В одном аспекте терминал доступа осуществляет поиск TDM1 в полосе частот 1,25 МГц. Следует отметить, что в некоторых аспектах TDM1 формы сигналов для всех полос частот выглядят идентичными в полосе частот. В соответствии с некоторыми аспектами выбираемая полоса частот (например, 1,25 МГц) выбирается минимальной поддерживаемой полосой частот, что гарантирует, что внеполосные помехи не влияют на это детектирование.
На фиг.8 показана блок-схема одного варианта осуществления системы 810 передатчиков и системы 850 приемников в MIMO системе 800. В системе 810 передатчиков данные графика для некоторого количества потоков данных предоставляются от источника 812 данных к процессору 814 передачи (ТХ) данных. В одном варианте осуществления каждый поток данных передается по соответствующей антенне передачи. ТХ процессор 814 данных форматирует, кодирует и перемежает данные графика для каждого потока данных на основе конкретной схемы кодирования, выбираемой для этого потока данных для обеспечения кодированных данных.
Кодированные данные для каждого потока данных могут быть мультиплексированы с данными пилот-сигнала с использованием OFDM способов. Данными пилот-сигнала обычно является известный шаблон данных, который обрабатывается известным образом и может использоваться в системе приемника для оценки характеристики канала. Мультиплексированный пилот-сигнал и кодированные данные для каждого потока данных затем модулируются (например, посимвольно преобразуются) на основе конкретной схемы модуляции (например, BPSK, QPSK, M-PSK или MQAM), выбранной для этого потока данных для обеспечения символов модуляции. Скорость передачи данных, кодирование и модуляция для каждого потока данных могут быть определены командами, выполняемыми процессором 830.
Символы модуляции для всех потоков данных затем предоставляются ТХ процессору 820, который может дополнительно обработать символы модуляции (например, для OFDM). ТХ процессор 820 затем предоставляет NT потоков символов модуляции NT передатчикам (TMTR) 822a-822t. Каждый передатчик 822 принимает и обрабатывает соответствующий поток символов для обеспечения одного или нескольких аналоговых сигналов и дополнительно преобразует (например, усиливает, фильтрует и преобразует с повышением частоты) эти аналоговые сигналы для обеспечения модулированного сигнала, подходящего для передачи по MIMO каналу. NT модулированные сигналы от передатчиков 822a-822t затем передаются от NT антенн 824a-824t, соответственно.
В системе 850 приемника переданные модулированные сигналы принимаются NR антеннами 852а-852r, и принятый сигнал от каждой антенны 852 предоставляется соответствующему приемнику (RCVR) 854. Каждый приемник 854 преобразует (например, фильтрует, усиливает и преобразует с понижением частоты) соответствующий принятый сигнал, оцифровывает преобразованный сигнал для обеспечения выборок и дополнительно обрабатывает эти выборки для обеспечения соответствующего «принятого» потока символов.
RX процессор 860 данных затем принимает и обрабатывает NR принятые потоки символов от NR приемников 854 на основе способа обработки конкретного приемника для обеспечения NT «детектированных» потоков символов. Обработка RX процессором 860 данных более подробно описана ниже. Каждый детектированный поток символов включает в себя символы, которые являются оценками символов модуляции, переданными для соответствующего потока данных. RX процессор 860 данных затем демодулирует, выполняет обращенное перемежение и декодирует каждый детектированный поток символов для восстановления данных графика для этого потока данных. Обработка RX процессором 860 данных является дополнительной к обработке, выполняемой ТХ процессором 820 и ТХ процессором 814 данных в системе 810 передатчиков.
Оценка характеристики канала, генерируемая RX процессором 860, может использоваться для выполнения пространственной, пространственно/временной обработки в приемнике, регулировки уровней мощности, изменения скоростей или схем модуляции или других действий. RX процессор 860 может дополнительно оценивать отношения «сигнал-шум и помеха» (SNR) детектированных потоков символов и возможно другие канальные характеристики и предоставляет эти величины процессору 870. RX процессор 860 данных или процессор 870 может дополнительно производить оценку «рабочего» SNR для системы. Процессор 870 затем обеспечивает информацию состояния канала (CSI), которая может содержать различные типы информации, относящейся к линии связи и/или принятого потока данных. Например, CSI может содержать только «рабочий» SNR. CSI затем обрабатывается ТХ процессором 878 данных, модулируется модулятором 880, преобразуется передатчиками 854а-854r и передается обратно к системе 810 передатчика.
В системе 810 передатчика модулированные сигналы от системы 850 приемника принимаются антеннами 824, преобразуются приемниками 822, демодулируются демодулятором 840 и обрабатываются RX процессором 842 данных для восстановления CSI, сообщенной системой приемника. Сообщенная CSI затем предоставляется процессору 830 и используется (1) для определения скоростей передачи данных и схем кодирования и модуляции, подлежащих использованию для этих потоков данных, и (2) для генерации различных операций управления для ТХ процессора 814 данных и ТХ процессора 820. Альтернативно, CSI может использоваться процессором 830 для определения схем модуляции и/или скоростей кодирования для передачи, вместе с другой информацией. Это может быть затем предоставлено передатчику, который использует эту информацию, которая может быть квантована, для предоставления более поздних передач приемнику.
Процессоры 830 и 870 управляют работой систем передатчика и приемника, соответственно. ЗУ 832 и 872 обеспечивают память для программных кодов и данных, используемых процессорами 830 и 870, соответственно. Для дуплексного режима передачи данных функции системы 850 приемников и системы 810 передатчиков могут быть взаимозаменяемыми, причем трафик данных в обратном направлении предоставляется от источника 836 данных, передается в систему 810 передатчиков способом, подобным описанному выше, декодируется в системе 810 передатчиков и предоставляется в приемник 844 данных для хранения.
В приемнике различные способы обработки могут использоваться для обработки NR принятых сигналов для детектирования NT переданных потоков данных. Эти способы обработки приемника могут быть сгруппированы в две основные категории: (i) пространственные и пространственно-временные способы обработки приемника (которые также называются способами компенсации); и (ii) способ обработки приемника «последовательное обнуление/компенсация и подавление помех» (который также называется способом обработки приемника «последовательное подавление помех» или «последовательное подавление»).
Используемые здесь термины «широковещательная передача» и «групповая передача» могут применяться к одной и той же передаче. А именно, не требуется, чтобы широковещательная передача обязательно посылалась ко всем терминалам точки доступа или сектора.
Способы передачи, описанные здесь, могут быть реализованы различными средствами. Например, эти способы могут быть реализованы в аппаратном обеспечении, программно-аппаратных средствах, программном обеспечении или их комбинации. Для аппаратной реализации процессоры в передатчике могут быть реализованы в одной или нескольких прикладных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), устройствах обработки цифровых сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных блоках, спроектированных для выполнения функций, описанных здесь, или их комбинациях. Обрабатывающие блоки в приемнике могут быть также реализованы в одной или нескольких ASIC, DSP, процессорах и т.д.
Для программной реализации способы передачи могут быть реализованы командами (например, процедурами, функциями и т.д.), которые могут использоваться для выполнения функций, описанных здесь. Эти команды могут храниться в памяти (например, памяти 832 или 872 на фиг.8) или другом компьютерном программном продукте и выполняться процессором (например, процессором 830 или 870). Память может быть реализована в процессоре или вне процессора.
Следует отметить, что понятие каналов здесь относится к информации или типам передачи, которые могут быть переданы точкой доступа или терминалом доступа. Оно не требует или использует фиксированные или заданные блоки поднесущих, периоды времени или другие ресурсы, выделенные для таких передач.
Фиг.9 иллюстрирует систему 900 для передачи информации в среде беспроводной связи. Система 900 может находиться, по меньшей мере, частично в базовой станции. Следует понимать, что система 900 представлена как включающая функциональные блоки, которые могут быть функциональными блоками, которые представляют функции, реализованные посредством процессора, программного обеспечения или их комбинацией (например, программно-аппаратными средствами).
Система 900 включает в себя логическую группировку 902 электрических компонентов, которые могут действовать отдельно или в сопряжении. Логическая группировка 902 может включать в себя электрический компонент для генерации первого пилот-сигнала 904 обнаружения, который может также называться TDM3. Первый пилот-сигнал обнаружения может включать в себя информацию определения системы. Второй пилот-сигнал обнаружения может указывать длину циклического префикса, используемую в переданных данных, используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты в суперкадре или их комбинации.
Также в логическую группировку 902 включен электрический компонент для передачи первого пилот-сигнала 904 обнаружения. В соответствии с некоторыми аспектами первый пилот-сигнал обнаружения может переноситься в преамбуле суперкадра.
В соответствии с некоторыми аспектами в логическую группировку 902 включен электрический компонент для формирования второго пилот-сигнала 906 обнаружения. Второй пилот-сигнал обнаружения иногда называется TDM2. Второй пилот-сигнал обнаружения может включать в себя последовательность, которая зависит от идентификатора сектора. Второй пилот-сигнал обнаружения может переноситься в преамбуле суперкадра.
В других аспектах логическая группировка 902 также включает в себя электрический компонент для создания третьего пилот-сигнала 910 обнаружения. Этот третий пилот-сигнал обнаружения может также называться TDM1. Третий пилот-сигнал обнаружения может включать в себя последовательность, которая зависит от рабочей полосы частот и циклического префикса. В соответствии с некоторыми аспектами третий пилот-сигнал обнаружения может переноситься в преамбуле суперкадра.
В качестве альтернативы или дополнения, электрический компонент 906 может включать в себя один или несколько первых, вторых или третьих пилот-сигналов обнаружения в преамбуле суперкадра, которая передается электрическим компонентом 906. Первый, второй или третий пилот-сигнал обнаружения может содержать любое множество последовательностей. В соответствии с некоторыми аспектами, если используются ортогональные последовательности, то ортогональные последовательности отличаются для первого (TDM3) и второго (TDM2) пилот-сигналов обнаружения, основанных на коде Уолша. GCL последовательности третьего пилот-сигнала обнаружения не являются ортогональными по отношению друг к другу. Первый пилот-сигнал обнаружения может быть скремблирован посредством содержимого второго пилот-сигнала обнаружения. Далее, центральная поднесущая пилот-сигналов обнаружения является приближенно центральной поднесущей пилот-сигналов обнаружения.
Первая, вторая и третья ортогональные последовательности могут быть непоследовательными OFDM символами, последовательными OFDM символами или их комбинацией. В некоторых аспектах в преамбуле суперкадра имеется по меньшей мере три OFDM символа.
Кроме того, система 900 может включать в себя память 914, которая сохраняет команды для выполнения функций, связанных с электрическими компонентами 904, 906, 908 и 910 или другими компонентами. Хотя они показаны внешними к памяти 914, следует понимать, что один или несколько электрических компонентов 904, 906, 908 и 910 могут существовать в памяти 914.
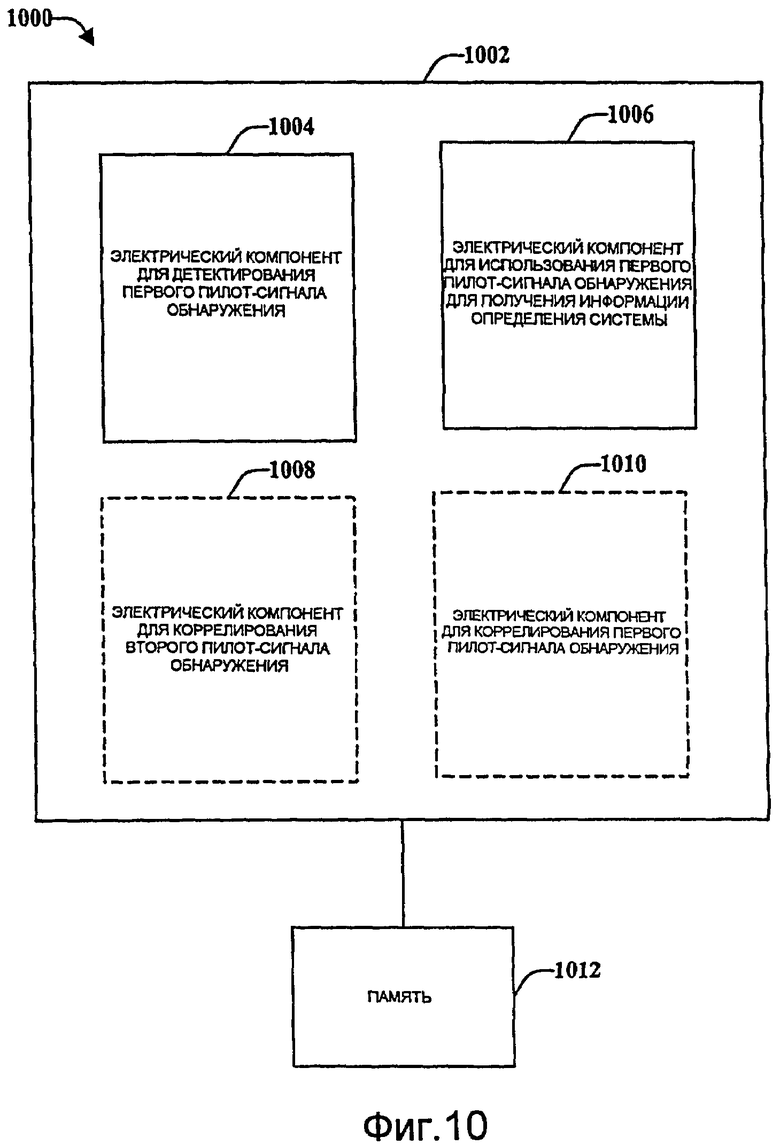
Фиг.10 иллюстрирует систему 1000 для приема информации в среде беспроводной связи. Система 1000 может находиться, по меньшей мере, частично в терминале. Следует понимать, что система 1000 представлена как включающая в себя функциональные блоки, которые могут быть функциональными блоками, которые представляют функции, реализованные процессором, программным обеспечением или их комбинацией (например, программно-аппаратными средствами).
Система 1000 включает в себя логическую группировку 1002 электрических компонентов, которые действуют раздельно или в сопряжении. Логическая группировка 1002 может включать в себя электрический компонент для детектирования первого пилот-сигнала 1004 обнаружения. Первый пилот-сигнал обнаружения может переноситься в преамбуле суперкадра и может называться TDM3. В преамбуле суперкадра может быть по меньшей мере три OFDM символа. Логическая группировка 1002 может также включать в себя электрический компонент для использования первого пилот-сигнала обнаружения для обнаружения информации 1006 определения системы. Первый пилот-сигнал обнаружения может указывать, используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты, или их комбинация.
В качестве дополнения или альтернативы, логическая группировка 1002 может включать в себя электрический компонент для коррелирования второго пилот-сигнала 1008 обнаружения с использованием гипотезы сектора. Второй пилот-сигнал обнаружения может называться TDM2. Также в логическую группировку 1002 включен электрический компонент для коррелирования первого пилот-сигнала 1010 обнаружения. Первый пилот-сигнал обнаружения (TDM3) может коррелироваться с использованием информации, включенной во второй пилот-сигнал обнаружения (TDM2). Коррелированно первого пилот-сигнала обнаружения может включать в себя коррелирование с использованием FHT. В соответствии с некоторыми аспектами коррелирование первого пилот-сигнала обнаружения включает в себя коррелирование с использованием PN последовательности или фазового сдвига, полученного от второго пилот-сигнала обнаружения.
В соответствии с некоторыми аспектами логическая группировка 1002 может также включать в себя электрический компонент для детектирования третьего пилот-сигнала обнаружения, который может называться TDM1. Третий пилот-сигнал обнаружения может указывать длину циклического префикса, используемую в переданных данных. В некоторых аспектах первый пилот-сигнал обнаружения скремблирован посредством содержимого второго пилот-сигнала обнаружения для различения секторов. Первая, вторая и третья последовательности могут быть непоследовательными OFDM символами или последовательными OFDM символами или их комбинациями.
Кроме того, система 1000 может включать в себя память 1012, которая сохраняет команды для выполнения функций, связанных с электрическими компонентами 1004, 1006, 1008 и 1010 или другими компонентами. Хотя они показаны как внешние к памяти 1012, следует понимать, что один или несколько электрических компонентов 1004, 1006, 1008 и 1010 могут существовать в памяти 1012.
Следует понимать, что конкретный порядок или иерархия этапов в описанных процессах является примером возможных подходов. В зависимости от конструктивных предпочтений ясно, что конкретный порядок или иерархия этапов в этих процессах могут быть изменены без выхода за рамки объема данного описания. Сопутствующий способ заявляет данные элементы различных этапов в порядке примера и не подразумевает ограничения представленным конкретным порядком или иерархией.
Специалистам в данной области техники должно быть понятно, что информация и сигналы могут быть представлены с использованием любых из существующего разнообразия различных технологий и методов. Например, данные, команды, информация, сигналы, биты, символы и элементы сигнала, которые упомянуты во всем вышеприведенном описании, могут быть представлены посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц или любой их комбинацией.
Специалистам также должно быть понятно, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритмов, описанные в отношении вариантов осуществления, описанных в настоящем документе, могут быть реализованы в виде электронного аппаратного обеспечения, компьютерного программного обеспечения или их сочетаний. Для ясной иллюстрации этой взаимозаменяемости аппаратного обеспечения и программного обеспечения различные иллюстративные компоненты, блоки, модули, схемы и этапы описаны выше в основном с точки зрения их функциональности. То, реализована ли та или иная функциональность в виде аппаратного обеспечения или программного обеспечения, зависит от конкретного приложения и проектных ограничений, наложенных на систему в целом. Специалисты в данной области техники могут реализовать описанную функциональность различными способами для каждого конкретного применения, но такие решения реализации не должны интерпретироваться как выходящие за рамки объема данного описания.
Различные иллюстративные логические блоки, модули и схемы, описанные в отношении вариантов осуществления, описанных в настоящем документе, могут быть реализованы или выполнены универсальным процессором, процессором цифровых сигналов (DSP), интегральной схемой прикладной ориентации (ASIC), программируемой пользователем вентильной матрицей (FPGA) или другим программируемым логическим устройством, схемой на дискретных компонентах или транзисторными логическими схемами, дискретными компонентами аппаратного обеспечения или любой их комбинацией, выполненной с возможностью выполнения функций, описанных в настоящем документе. Универсальным процессором может быть микропроцессор, контроллер, микроконтроллер или машина состояний. Процессор может быть также реализован в виде комбинации вычислительных устройств, например комбинации DSP и микропроцессора, множества микропроцессоров, одного или нескольких микропроцессоров в сочетании с ядром DSP, или любой другой такой конфигурации.
Этапы способа или алгоритма, описанного в отношении вариантов осуществления, описанных в настоящем документе, могут быть воплощены непосредственно в аппаратном обеспечении, в модуле программного обеспечения, выполняемом процессором, или в их комбинации. Модуль программного обеспечения может находиться в ЗУПВ, флэш-памяти, ПЗУ, СППЗУ, ЭСППЗУ, регистрах, жестком диске, съемном диске, компакт-диске или любой другой форме носителя данных, известной в данной области техники. Примерный носитель данных связан с процессором таким образом, что процессор может считывать информацию с этого носителя данных и записывать информацию на него. В качестве альтернативы, носитель данных может составлять с процессором одно целое. Процессор и носитель данных могут находиться в ASIC. ASIC может находиться в терминале пользователя. В качестве альтернативы, процессор и носитель данных могут находиться в терминале пользователя в виде дискретных компонентов.
Вышеприведенное описание раскрытых вариантов осуществления представлено для того, чтобы позволить любому специалисту в данной области техники осуществить или использовать данное описание. Различные модификации этих вариантов осуществления очевидны для специалистов в данной области техники, и общие принципы, определенные здесь, могут быть применены к другим вариантам осуществления, не выходя за рамки сущности и объема этого описания. Таким образом, данное описание не подразумевает ограничения вариантами осуществления, показанными в данном документе, а должно соответствовать наиболее широкому объему, совместимому с принципами и новыми признаками, описанными в настоящем документе.
Для реализации в виде программного обеспечения способы, описанные здесь, могут быть реализованы модулями (например, процедурами, функциями и так далее), которые выполняют функции, описанные здесь. Коды программного обеспечения могут храниться в блоках памяти и выполняться процессорами. Блок памяти может быть реализован в процессоре или вне процессора, и в этом случае он может быть коммуникативно связан с процессором различными средствами, известными в данной области техники.
Кроме того, различные аспекты или признаки, описанные в настоящем документе, могут быть реализованы в виде способа, устройства или продукта с использованием стандартных методов программирования и/или конструирования. Термин «продукт», используемый здесь, включает в себя компьютерную программу, доступную с любого машиночитаемого устройства, носителя информации или среды передачи данных. Например, машиночитаемый носитель может включать в себя, не ограничиваясь, магнитные ЗУ (например, жесткий диск, дискету, магнитные ленты и так далее), оптические диски (например, компакт-диск (CD), цифровой универсальный диск (DVD) и так далее), смарт-карты и устройства флэш-памяти (например, СППЗУ, карту, карту памяти, носитель флэш-памяти и так далее). Кроме того, различные носители данных, описанные в настоящем документе, могут представлять собой одно или несколько устройств и/или других машиночитаемых носителей для хранения информации. Термин «машиночитаемый носитель» может включать в себя, не ограничиваясь, беспроводные каналы и различные другие носители, выполненные с возможностью хранения, содержания и/или переноса команды (команд) и/или данных.
То, что было описано выше, включает в себя примеры одного или нескольких вариантов осуществления. Конечно, невозможно описать каждую возможную комбинацию компонентов или способов с целью описания вышеупомянутых вариантов осуществления, но специалист обычной квалификации в данной области техники может понять, что возможны многие дополнительные комбинации и перестановки различных вариантов осуществления. Соответственно, предполагается, что описанные варианты осуществления охватывают все такие изменения, модификации и вариации, которые находятся в пределах объема прилагаемой формулы изобретения. В том смысле, в котором термин «включает в себя» используется либо в подробном описании, либо в формуле изобретения, подразумевается, что этот термин является включающим в себя подобно термину «содержащий» в том смысле, в котором «содержащий» интерпретируется при использовании в качестве переходного слова в пункте формулы изобретения. Кроме того, термин «или», используемый либо в подробном описании, либо в формуле изобретения, означает «не исключающее или».
Изобретение относится к технике связи и может использоваться для систем беспроводной связи. Технический результат состоит в обеспечении возможности быстрого поискового вызова. Для этого преамбула в кадре может включать в себя информацию определения системы, которая может улучшить выполнение обнаружения. Структуры суперкадров могут обеспечить возможность эффективного определения гибких параметров, которые определяют структуру преамбулы. Структуры суперкадров могут также улучшить возможность быстрого поискового вызова для масштабирования с полосой частот. 10 н. и 76 з.п. ф-лы, 10 ил.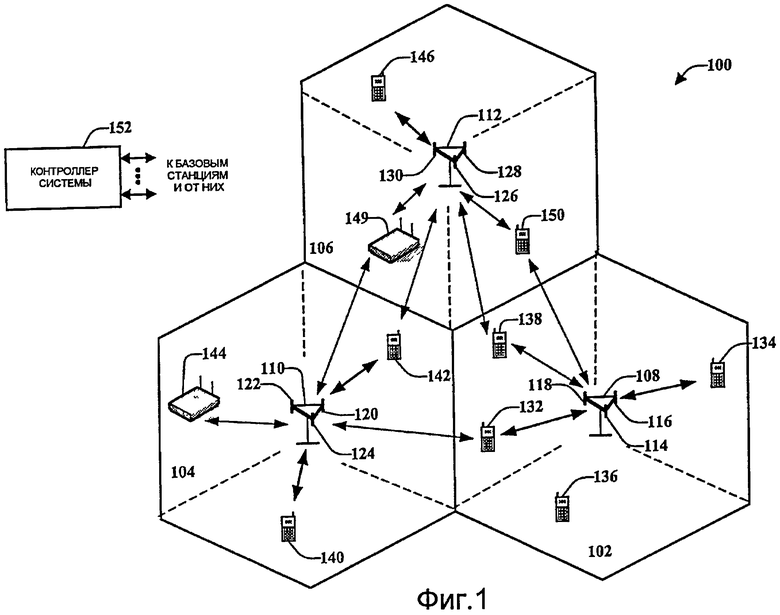
1. Способ передачи информации в системе беспроводной связи, содержащий этапы, на которых:
генерируют первый пилот-сигнал обнаружения, который несет информацию определения системы; генерируют второй пилот-сигнал обнаружения на основании идентификатора сектора и передают первый и второй пилот-сигналы обнаружения к терминалам в системе беспроводной связи.
2. Способ по п.1, в котором упомянутый первый пилот-сигнал обнаружения переносится в преамбуле суперкадра.
3. Способ по п.1, в котором второй пилот-сигнал обнаружения переносится в преамбуле суперкадра.
4. Способ по п.1, в котором упомянутый второй пилот-сигнал обнаружения генерируют в зависимости дополнительно от рабочей полосы частот и длины циклического префикса.
5. Способ по п.1, дополнительно содержащий этапы, на которых:
генерируют третий пилот-сигнал обнаружения, который включает в себя последовательность, которая зависит от рабочей полосы частот и длины циклического префикса, причем первый, второй и третий пилот-сигналы обнаружения переносятся в преамбуле суперкадра.
6. Способ по п.5, в котором третий пилот-сигнал обнаружения скремблирован посредством содержимого второго пилот-сигнала обнаружения для различения секторов.
7. Способ по п.5, в котором первый, второй и третий пилот-сигналы обнаружения передаются не в последовательных OFDM символах.
8. Способ по п.5, в котором первый, второй и третий пилот-сигналы обнаружения передаются в последовательных OFDM символах.
9. Способ по п.1, в котором первый пилот-сигнал обнаружения генерируют с использованием одной из множества ортогональных последовательностей.
10. Способ по п.9, в котором множеством ортогональных последовательностей является множество кодов Уолша.
11. Способ по п.1, в котором центральная поднесущая второго пилот-сигнала обнаружения является приближенно центральной поднесущей пилот-сигналов обнаружения.
12. Способ по п.1, в котором первый пилот-сигнал обнаружения указывает длину циклического префикса, используемую в переданных данных.
13. Способ по п.1, в котором первый пилот-сигнал обнаружения указывает, используется ли синхронный или асинхронный режим.
14. Способ по п.1, в котором первый пилот-сигнал обнаружения указывает, используется ли полудуплексный режим.
15. Способ по п.1, в котором первый пилот-сигнал обнаружения указывает, используется ли повторное использование частоты.
16. Способ по п.2, в котором в преамбуле суперкадра имеется по меньшей мере три OFDM символа.
17. Устройство беспроводной связи, содержащее:
по меньшей мере один процессор, выполненный с возможностью создания первого пилот-сигнала обнаружения, который несет информацию определения системы, создания второго пилот-сигнала обнаружения на основании идентификатора сектора и передачи первого и второго пилот-сигналов обнаружения; и
память, связанную с упомянутым по меньшей мере одним процессором.
18. Устройство беспроводной связи по п.17, в котором упомянутый первый пилот-сигнал обнаружения переносится в преамбуле суперкадра.
19. Устройство беспроводной связи по п.17, в котором упомянутый второй пилот-сигнал обнаружения переносится в преамбуле суперкадра.
20. Устройство беспроводной связи по п.17, в котором по меньшей мере один процессор дополнительно выполнен с возможностью генерации второго пилот-сигнала обнаружения в зависимости дополнительно от рабочей полосы частот и длины циклического префикса.
21. Устройство беспроводной связи по п.17, в котором по меньшей мере один процессор дополнительно выполнен с возможностью генерации третьего пилот-сигнала обнаружения, который включает в себя последовательность, которая зависит от рабочей полосы частот и длины циклического префикса, причем второй и третий пилот-сигналы обнаружения переносятся в преамбуле суперкадра.
22. Устройство беспроводной связи по п.21, в котором первый пилот-сигнал обнаружения скремблирован посредством содержимого второго пилот-сигнала обнаружения для различения секторов.
23. Устройство беспроводной связи по п.21, в котором первый, второй и третий пилот-сигналы обнаружения передаются не в последовательных OFDM символах.
24. Устройство беспроводной связи по п.21, в котором первый, второй и третий пилот-сигналы обнаружения передаются в последовательных OFDM символах.
25. Устройство беспроводной связи по п.17, в котором первый пилот-сигнал обнаружения генерируется с использованием одной из множества ортогональных последовательностей.
26. Устройство беспроводной связи по п.25, в котором множеством ортогональных последовательностей является множество кодов Уолша.
27. Устройство беспроводной связи по п.17, в котором центральная поднесущая второго пилот-сигнала обнаружения является приближенно центральной поднесущей пилот-сигналов обнаружения.
28. Устройство беспроводной связи по п.17, в котором первый пилот-сигнал обнаружения указывает длину циклического префикса, используемую в переданных данных.
29. Устройство беспроводной связи по п.17, в котором первый пилот-сигнал обнаружения указывает, используется ли синхронный или асинхронный режим.
30. Устройство беспроводной связи по п.17, в котором первый пилот-сигнал обнаружения указывает, используется ли полудуплексный режим.
31. Устройство беспроводной связи по п.17, в котором первый пилот-сигнал обнаружения указывает, используется ли повторное использование частоты.
32. Устройство беспроводной связи по п.18, в котором в преамбуле суперкадра имеется по меньшей мере три OFDM символа.
33. Устройство беспроводной связи, которое передает информацию, содержащее:
средство для генерации первого пилот-сигнала обнаружения, который несет информацию определения системы;
средство для генерации второго пилот-сигнала обнаружения на основании идентификатора сектора и
средство для передачи первого и второго пилот-сигналов обнаружения к терминалам в пределах системы беспроводной связи.
34. Устройство беспроводной связи по п.33, в котором упомянутый первый пилот-сигнал обнаружения переносится в преамбуле суперкадра.
35. Устройство беспроводной связи по п.33, дополнительно содержащее:
средство для генерации третьего пилот-сигнала обнаружения, который включает в себя последовательность, которая зависит от рабочей полосы частот и длины циклического префикса, причем первый, второй и третий пилот-сигналы обнаружения переносятся в преамбуле суперкадра.
36. Устройство беспроводной связи по п.35, в котором третий пилот-сигнал обнаружения скремблирован посредством содержимого второго пилот-сигнала обнаружения для различения секторов.
37. Устройство беспроводной связи по п.35, в котором первый, второй и третий пилот-сигналы обнаружения передаются не в последовательных OFDM символах.
38. Устройство беспроводной связи по п.35, в котором первый, второй и третий пилот-сигналы обнаружения передаются в последовательных OFDM символах.
39. Устройство беспроводной связи по п.33, в котором первый пилот-сигнал обнаружения генерируется с использованием одной из множества ортогональных последовательностей.
40. Устройство беспроводной связи по п.39, в котором множеством ортогональных последовательностей является множество кодов Уолша.
41. Устройство беспроводной связи по п.33, в котором центральная поднесущая второго пилот-сигнала обнаружения является приближенно центральной поднесущей пилот-сигналов обнаружения.
42. Устройство беспроводной связи по п.33, в котором первый пилот-сигнал обнаружения указывает длину циклического префикса, используемую в переданных данных.
43. Устройство беспроводной связи по п.33, в котором первый пилот-сигнал обнаружения указывает, используется ли синхронный или асинхронный режим.
44. Устройство беспроводной связи по п.33, в котором первый пилот-сигнал обнаружения указывает, используется ли полудуплексный режим.
45. Устройство беспроводной связи по п.33, в котором первый пилот-сигнал обнаружения указывает, используется ли повторное использование частоты.
46. Устройство беспроводной связи по п.34, в котором в преамбуле суперкадра имеется по меньшей мере три OFDM символа.
47 Машиночитаемый носитель, содержащий:
код, побуждающий по меньшей мере один компьютер создавать первый пилот-сигнал обнаружения, который несет информацию определения системы;
код, побуждающий упомянутый, по меньшей мере, один компьютер создавать второй пилот-сигнал обнаружения на основании идентификатора сектора; и
код, побуждающий упомянутый по меньшей мере один компьютер передавать первый и второй пилот-сигналы обнаружения к терминалам в системе беспроводной связи.
48. Устройство беспроводной связи, содержащее:
процессор, выполненный с возможностью:
генерации первого пилот-сигнала обнаружения, который несет информацию определения системы;
генерации второго пилот-сигнала обнаружения на основании
идентификатора сектора и
передачи первого и второго пилот-сигналов обнаружения к терминалам в пределах системы беспроводной связи; и
память, связанную с упомянутым процессором.
49. Способ приема информации в системе беспроводной связи, содержащий этапы, на которых:
детектируют первый пилот-сигнал обнаружения;
используют первый пилот-сигнал обнаружения для получения информации определения системы;
детектируют второй пилот-сигнал обнаружении и
используют второй пилот-сигнал обнаружения для получения идентификатора сектора.
50. Способ по п.49, в котором упомянутый первый пилот-сигнал обнаружения переносится в преамбуле суперкадра.
51. Способ по п.49, в котором первый пилот-сигнал обнаружения включает в себя информацию определения системы.
52. Способ по п.49, дополнительно содержащий этапы, на которых:
выполняют коррелирование второго пилот-сигнала обнаружения с использованием гипотезы сектора и
выполняют коррелирование первого пилот-сигнала обнаружения с использованием информации, включенной во второй пилот-сигнал обнаружения.
53. Способ по п.52, в котором коррелирование первого пилот-сигнала обнаружения включает в себя коррелирование с использованием быстрого преобразования Адамара (FHT).
54. Способ по п.52, в котором коррелирование первого пилот-сигнала обнаружения включает в себя коррелирование с использованием PN-последовательности или фазового сдвига, полученного от второго пилот-сигнала обнаружения.
55. Способ по п.49, в котором первый пилот-сигнал обнаружения скремблирован посредством содержимого второго пилот-сигнала обнаружения для различения секторов.
56. Способ по п.49, дополнительно содержащий этап, на котором детектируют третий пилот-сигнал обнаружения, причем третий пилот-сигнал обнаружения указывает длину циклического префикса, используемого в переданных данных.
57. Способ по п.56, в котором первый, второй и третий пилот-сигналы обнаружения передаются не в последовательных OFDM символах.
58. Способ по п.56, в котором первый, второй и третий пилот-сигналв обнаружения передаются в последовательных OFDM символах.
59. Способ по п.50, в котором в преамбуле суперкадра имеется по меньшей мере три OFDM символа.
60. Способ по п.49, в котором первый пилот-сигнал обнаружения указывает одно из следующего: используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты, или их комбинации.
61. Устройство беспроводной связи, содержащее:
по меньшей мере один процессор, выполненный с возможностью детектирования первого пилот-сигнала обнаружения, использования первого пилот-сигнала обнаружения для получения информации определения системы; детектирования второго пилот-сигнала обнаружения и использования второго пилот-сигнала обнаружения для получения идентификатора сектора; и память, связанную с упомянутым по меньшей мере одним процессором.
62. Устройство беспроводной связи по п.61, в котором первый пилот-сигнал обнаружения переносится в преамбуле суперкадра.
63. Устройство беспроводной связи по п.61, в котором первый пилот-сигнал обнаружения включает в себя информацию определения системы.
64. Устройство беспроводной связи по п.61, в котором упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью коррелирования второго пилот-сигнала обнаружения с использованием гипотезы сектора и коррелирования первого пилот-сигнала обнаружения с использованием информации, включенной во второй пилот-сигнал обнаружения.
65. Устройство беспроводной связи по п.64, в котором коррелирование первого пилот-сигнала обнаружения содержит коррелирование с использованием быстрого преобразования Адамара (FHT).
66. Устройство беспроводной связи по п.64, в котором коррелирование первого пилот-сигнала обнаружения содержит коррелирование с использованием PN-последовательности или фазового сдвига, полученного от второго пилот-сигнала обнаружения.
67. Устройство беспроводной связи по п.61, в котором первый пилот-сигнал обнаружения скремблирован посредством содержимого второго пилот-сигнала обнаружения для различения секторов.
68. Устройство беспроводной связи по п.61, в котором упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью детектирования третьего пилот-сигнала обнаружения, в котором третий пилот-сигнал обнаружения указывает длину циклического префикса, используемую в переданных данных.
69. Устройство беспроводной связи по п.68, в котором первый, второй и третий пилот-сигналы обнаружения передаются не в последовательных OFDM символах.
70. Устройство беспроводной связи по п.68, в котором первый, второй и третий пилот-сигналы передаются в последовательных OFDM символах.
71. Устройство беспроводной связи по п.61, в котором в преамбуле суперкадра имеется по меньшей мере три OFDM символа.
72. Устройство беспроводной связи по п.61, в котором первый пилот-сигнал обнаружения указывает одно из следующего: используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты, или их комбинации.
73. Устройство беспроводной связи, которое принимает информацию, содержащее:
средство для детектирования первого пилот-сигнала обнаружения;
средство для использования первого пилот-сигнала обнаружения для получения информации определения системы;
средство для детектирования второго пилот-сигнала обнаружения и
средство для использования второго пилот-сигнала обнаружения для получения идентификатора сектора.
74. Устройство беспроводной связи по п.73, в котором упомянутый первый пилот-сигнал обнаружения переносится в преамбуле суперкадра.
75. Устройство беспроводной связи по п.73, в котором первый пилот-сигнал обнаружения включает в себя информацию определения системы.
76. Устройство беспроводной связи по п.73, дополнительно содержащее:
средство для коррелирования второго пилот-сигнала обнаружения с использованием гипотезы сектора и
средство для коррелирования первого пилот-сигнала обнаружения с использованием информации, включенной во второй пилот-сигнал обнаружения.
77. Устройство беспроводной связи по п.76, в котором средство для коррелирования первого пилот-сигнала обнаружения содержит средство для коррелирования с использованием быстрого преобразования Адамара (FHT).
78. Устройство беспроводной связи по п.76, в котором средство для коррелирования первого пилот-сигнала обнаружения содержит средство для коррелирования с использованием PN-последовательности или фазового сдвига, полученного от второго пилот-сигнала обнаружения.
79. Устройство беспроводной связи по п.73, в котором первый пилот-сигнал обнаружения скремблирован посредством содержимого второго пилот-сигнала обнаружения для различения секторов.
80. Устройство беспроводной связи по п.73, дополнительно содержащее средство для детектирования третьего пилот-сигнала обнаружения, причем третий пилот-сигнал обнаружения указывает длину циклического префикса, используемого в переданных данных.
81. Устройство беспроводной связи по п.80, в котором первый, второй и третий пилот-сигналы обнаружения передаются не в последовательных OFDM символах.
82. Устройство беспроводной связи по п.80, в котором первый, второй и третий пилот-сигналы обнаружения передаются в последовательных OFDM символах.
83. Устройство беспроводной связи по п.74, в котором в преамбуле суперкадра имеется по меньшей мере три OFDM символа.
84. Устройство беспроводной связи по п.73, в котором первый пилот-сигнал обнаружения указывает одно из следующего: используется ли синхронный или асинхронный режим, используется ли полудуплексный режим, используется ли повторное использование частоты, или их комбинации.
85. Машиночитаемый носитель, содержащий:
код, побуждающий по меньшей мере один компьютер обнаруживать первый пилот-сигнал обнаружения; обнаруживать второй пилот-сигнал обнаружения; и
код, побуждающий по меньшей мере один компьютер получать информацию определения системы из первого пилот-сигнала обнаружения и получать идентификатор сектора из второго пилот-сигнала обнаружения.
86. Устройство беспроводной связи, содержащее:
процессор, выполненный с возможностью:
детектирования первого пилот-сигнала обнаружения, который включает в себя информацию определения системы;
интерпретации определения системы, включенного в первый пилот-сигнал обнаружения,
детектирования второго пилот-сигнала обнаружения и получения идентификатора сектора из второго пилот-сигнала обнаружения, и
память, связанную с упомянутым процессором.
| Авторулевой | 1988 |
|
SU1533950A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ СДВИГОВ ПСЕВДОШУМОВОГО ПИЛОТ-СИГНАЛА В МОБИЛЬНОЙ СИСТЕМЕ СВЯЗИ | 1998 |
|
RU2139642C1 |
| WO 0/01127 А, 06.01.2000 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1989 |
|
SU1619847A1 |

