Перекрестная ссылка
Настоящая заявка испрашивает приоритет предварительной заявки США № 60/802,628, поданной 22 мая 2006, озаглавленной «Обнаружение сигналов в системе беспроводной связи», которая включена в настоящее описание во всей полноте посредством ссылки.
Область техники
Настоящее раскрытие относится в целом к беспроводной связи, и более конкретно, к способам для обнаружения сигнала в системе беспроводной связи.
Предшествующий уровень техники
Системы беспроводной связи в последнее время широко распространены для обеспечения различных услуг связи, например услуги голосовой связи, видео, пакетных данных, вещания и передачи сообщений могут предоставляться посредством таких систем беспроводной связи. Такие системы могут быть системами множественного доступа, которые обеспечивают поддержку связи для множества терминалов путем совместного использования доступных ресурсов. Примерами таких систем множественного доступа являются системы множественного доступа с кодовым разделением (CDMА), системы множественного доступа с временным разделением (TDMА), системы множественного доступа с частотным разделением (FDMА) и системы множественного доступа с ортогональным частотным разделением (OFDM).
В системе беспроводной связи базовая станция в типовом случае обрабатывает (например, кодирует и отображает на символы) данные, чтобы получить символы модуляции и затем далее обрабатывает символы модуляции для генерации модулированного сигнала. Базовая станция затем в типовом случае передает модулированный сигнал через канал связи. Далее, такая система часто использует схему передачи, посредством которой данные передаются в кадрах, причем каждый кадр имеет конкретную длительность времени.
Беспроводный терминал в системе может не знать, какие базовые станции, если таковые вообще имеются, в его окрестности осуществляют передачи. Кроме того, терминал может не знать начало каждого кадра для данной базовой станции, время, в которое каждый кадр передан базовой станцией, или задержку распространения, введенную каналом связи. Таким образом, терминал может выполнить обнаружение сигнала, чтобы обнаружить передачи от базовых станций в системе и синхронизироваться с временными характеристиками (хронированием) и частотой каждой из обнаруженных базовых станций, представляющей интерес. При использовании процесса обнаружения сигнала терминал может установить временные характеристики обнаруженной базовой станции и должным образом выполнить комплементарную демодуляцию для базовой станции.
Как правило, базовая станция и терминал расходуют ресурсы системы, чтобы поддерживать обнаружение сигнала. Так как необходима служебная нагрузка обнаружения сигнала для передачи данных, желательно минимизировать количество ресурсов, используемых как базовыми станциями, так и терминалами для обнаружения. Таким образом, в технике существует потребность в способах эффективного выполнения обнаружения сигнала в системе беспроводной связи.
Сущность изобретения
Ниже представлено упрощенное краткое описание раскрытых вариантов осуществления, чтобы обеспечить базовое понимание таких вариантов осуществления. Это краткое описание не является обширным обзором всех возможных вариантов осуществления и не предназначено ни для идентификации ключевых или критических элементов, ни для определения объема таких вариантов осуществления. Его назначение состоит в том, чтобы представить некоторые принципы раскрытых вариантов осуществления в упрощенной форме как вступление к более детальному описанию, которое представлено далее.
Описанные варианты осуществления смягчают вышеупомянутые проблемы путем генерации пилот-сигналов обнаружения для процесса обнаружения сигнала, основанного на последовательностях пилот-сигналов временной области. Пилот-сигналы обнаружения могут генерироваться базовой станцией и передаваться в поле пилот-сигналов на один или более терминалов доступа, содействуя обнаружению сигнала. Генерируемые пилот-сигналы могут основываться на одной или более последовательностях пилот-сигналов, которые являются общими для всех базовых станций в системе беспроводной связи, таким образом позволяя терминалу в системе получить оценку временных характеристик для системы, минимизируя эффекты вариаций помех между базовыми станциями. Кроме того, один или более из сгенерированных пилот-сигналов могут быть уникальными для каждой базовой станции, таким образом, позволяя терминалу идентифицировать конкретную базовую станцию для связи.
Согласно одному аспекту описан способ для генерации и передачи пилот-сигналов обнаружения в системе беспроводной связи. Способ может включать в себя генерацию первого пилот-сигнала обнаружения, основанного, по меньшей мере, частично на первой последовательности пилот-сигнала временной области, причем первая последовательность пилот-сигнала временной области является общей для системы беспроводной связи. Далее, способ может включать в себя генерацию второго пилот-сигнала обнаружения, основанного, по меньшей мере, частично на второй последовательности пилот-сигнала временной области, причем вторая последовательность пилот-сигнала временной области является общей для подмножества системы беспроводной связи, которое включает в себя меньше, чем всю систему беспроводной связи. Способ может также включать в себя генерацию третьего пилот-сигнала обнаружения, основанного, по меньшей мере, частично на третьей последовательности пилот-сигнала временной области, причем третья последовательность пилот-сигнала временной области является общей для подмножества системы беспроводной связи, которое включает в себя меньше, чем всю систему беспроводной связи. Кроме того, способ может включать в себя передачу первой, второй и третьей последовательности пилот-сигнала временной области на один или более терминалов доступа в поле пилот-сигналов.
Другой аспект относится к устройству беспроводной связи, которое может содержать память, которая хранит данные, относящиеся к первой последовательности пилот-сигнала временной области, второй последовательности пилот-сигнала временной области и третьей последовательности пилот-сигнала временной области, причем первая последовательность пилот-сигнала временной области является общей для системы, в которой работает устройство беспроводной связи, а вторая последовательность пилот-сигнала временной области и третья последовательность пилот-сигнала временной области являются общими для подмножества системы, которое включает в себя меньше, чем всю систему. Устройство беспроводной связи может также включать в себя процессор, конфигурированный для генерации первого пилот-сигнала обнаружения из первой последовательности пилот-сигнала временной области, генерации второго пилот-сигнала обнаружения из второй последовательности пилот-сигнала временной области, генерации третьего пилот-сигнала обнаружения из третьей последовательности пилот-сигнала временной области и передачи трех сгенерированных пилот-сигналов обнаружения на терминал.
Еще один аспект относится к устройству, которое обеспечивает генерацию и передачу последовательностей пилот-сигналов в сети беспроводной связи. Устройство может включать в себя средство для генерации первой последовательности пилот-сигнала временной области, которая является общей для сети беспроводной связи. Устройство может также включать в себя средство для генерации второй последовательности пилот-сигнала временной области, которая является общей для менее чем всей сети беспроводной связи. Далее, устройство может включать в себя средство для генерации третьей последовательности пилот-сигнала временной области, которая является общей для менее чем всей сети беспроводной связи. Дополнительно, устройство может включать в себя средство для передачи сгенерированных последовательностей пилот-сигналов временной области к одному или более пользователям.
Другой аспект относится к машиночитаемому носителю, имеющему сохраненные на нем исполняемые компьютером инструкции для генерации и передачи информации для обнаружения сигнала в среде беспроводной связи. Инструкции могут включать в себя генерацию первого пилот-сигнала обнаружения, второго пилот-сигнала обнаружения и третьего пилот-сигнала обнаружения, основанных на одной или более последовательностях во временной области, причем, по меньшей мере, одна последовательность, на которой основан первый пилот-сигнал обнаружения, является общей для среды беспроводной связи. Далее, инструкции могут включать в себя передачу сгенерированных пилот-сигналов обнаружения на терминал.
Согласно другому аспекту описан процессор, который может исполнять исполняемые компьютером инструкции для того, чтобы предоставить информацию обнаружения в сети беспроводной связи. Инструкции могут включать в себя генерацию первого пилот-сигнала обнаружения, основанного, по меньшей мере, частично на первой последовательности временной области. Далее, инструкции могут включать в себя генерацию второго пилот-сигнала обнаружения, основанного, по меньшей мере, частично на второй последовательности пилот-сигнала временной области и идентификаторе для объекта, генерирующего пилот-сигнал обнаружения. Кроме того, инструкции могут включать в себя генерацию третьего пилот-сигнала обнаружения, основанного, по меньшей мере, частично на третьей последовательности пилот-сигнала временной области и идентификаторе для объекта, генерирующего пилот-сигналы обнаружения.
Согласно еще одному аспекту описан способ для обнаружения сигнала в системе беспроводной связи. Способ может включать в себя обнаружение первого пилот-сигнала обнаружения временной области, второго пилот-сигнала обнаружения временной области и третьего пилот-сигнала обнаружения временной области. Кроме того, способ может включать в себя идентификацию пункта доступа для связи, основываясь, по меньшей мере, частично на обнаруженных пилот-сигналах обнаружения временной области. Далее, способ может включать в себя синхронизацию с идентифицированным пунктом доступа для связи, основываясь, по меньшей мере, частично на обнаруженных пилот-сигналах обнаружения временной области.
Другой аспект относится к устройству беспроводной связи, которое может включать в себя память и может также включать в себя процессор, соединенный с памятью, конфигурированный для обнаружения поля пилот-сигналов, включающего в себя три пилот-сигнала обнаружения временной области, и идентификации и синхронизации с базовой станцией для связи, основываясь, по меньшей мере, частично на поле пилот-сигналов.
Еще один аспект относится к устройству, который обеспечивает обнаружение сигнала в сети беспроводной связи. Устройство может включать в себя средство для обнаружения первого пилот-сигнала обнаружения, основанного, по меньшей мере, частично на первой последовательности пилот-сигнала временной области. Кроме того, устройство может включать в себя средство для обнаружения второго пилот-сигнала обнаружения, основанного, по меньшей мере, частично на второй последовательности пилот-сигнала временной области. Устройство может также включать в себя средство для обнаружения третьего пилот-сигнала обнаружения, основанного, по меньшей мере, частично на третьей последовательности пилот-сигнала временной области. Далее, устройство может включать в себя средство для идентификации объекта, соответствующего обнаруженным пилот-сигналам обнаружения. Устройство может дополнительно включать в себя средство для синхронизации с объектом, соответствующим обнаруженным пилот-сигналам обнаружения.
Еще один аспект относится к машиночитаемому носителю, имеющему сохраненные на нем исполняемые компьютером инструкции для получения информации для связи в среде беспроводной связи. Инструкции могут включать в себя обнаружение первого пилот-сигнала обнаружения, второго пилот-сигнала обнаружения и третьего пилот-сигнала обнаружения, причем каждый пилот-сигнал обнаружения основан на одной или более последовательностях во временной области. Инструкции могут также включать в себя идентификацию пункта доступа для связи, основываясь на обнаруженных пилот-сигналах обнаружения. Далее, инструкции могут включать в себя получение информации хронирования, соответствующей идентифицированному пункту доступа, основываясь на обнаруженных пилот-сигналах обнаружения.
Согласно другому аспекту описан процессор, который может исполнять исполняемые компьютером инструкции для получения сигнала для связи в системе беспроводной связи. Инструкции могут включать в себя обнаружение поля пилот-сигналов, включающего в себя первую последовательность пилот-сигнала временной области, вторую последовательность пилот-сигнала временной области и третью последовательность пилот-сигнала временной области, причем первая последовательность пилот-сигнала временной области является общей для системы беспроводной связи. Далее, инструкции могут включать в себя установление соединения для связи с базовой станцией, основываясь, по меньшей мере, частично на обнаруженном поле пилот-сигналов.
Для достижения вышеуказанных и связанных с ними целей один или более вариантов осуществления включают в себя признаки, в дальнейшем полностью описанные и, в частности, представленные в формуле изобретения. Последующее описание и иллюстрирующие чертежи формулируют детально определенные иллюстративные аспекты раскрытых вариантов осуществления. Эти аспекты показательны, однако, всего лишь для некоторых из различных путей, в которых могут использоваться принципы различных вариантов осуществления. Кроме того, раскрытые варианты осуществления предназначены для включения в себя всех таких аспектов и их эквивалентов.
Краткое описание чертежей
Фиг.1 иллюстрирует беспроводную систему связи множественного доступа в соответствии с различными аспектами, сформулированными здесь.
Фиг.2 - блок-схема системы, которая обеспечивает обнаружение сигнала в системе беспроводной связи в соответствии с различными аспектами.
Фиг.3 иллюстрирует пример поля пилот-сигналов TDM в соответствии с различными аспектами.
Фиг.4A-4B иллюстрируют примерные структуры суперкадра для системы беспроводной связи множественного доступа в соответствии с различными аспектами.
Фиг.5A иллюстрирует примерную схему синхронной передачи пилот-сигналов прямой линии связи в соответствии с различными аспектами.
Фиг.5B иллюстрирует примерную ступенчатую схему передачи пилот-сигналов прямой линии связи в соответствии с различными аспектами.
Фиг.5C иллюстрирует примерную схему асинхронной передачи пилот-сигналов прямой линии связи в соответствии с различными аспектами.
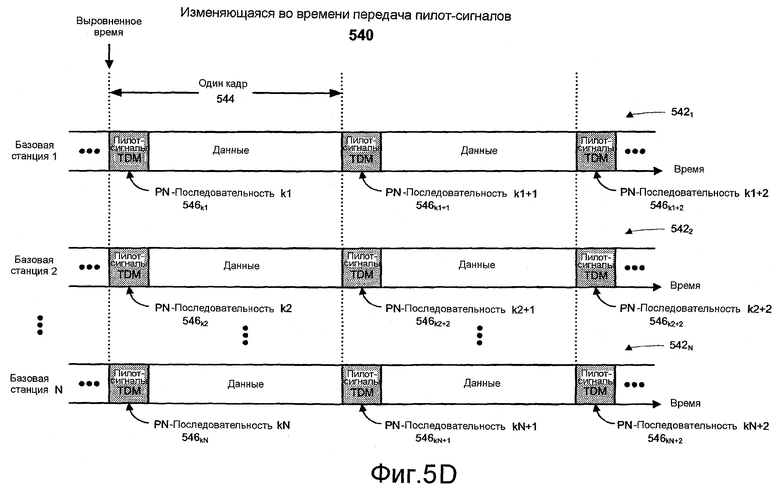
Фиг.5D иллюстрирует примерную схему изменяющейся во времени передачи пилот-сигналов прямой линии связи в соответствии с различными аспектами.
Фиг.6 - блок-схема способа для генерации и передачи пилот-сигналов обнаружения в системе беспроводной связи.
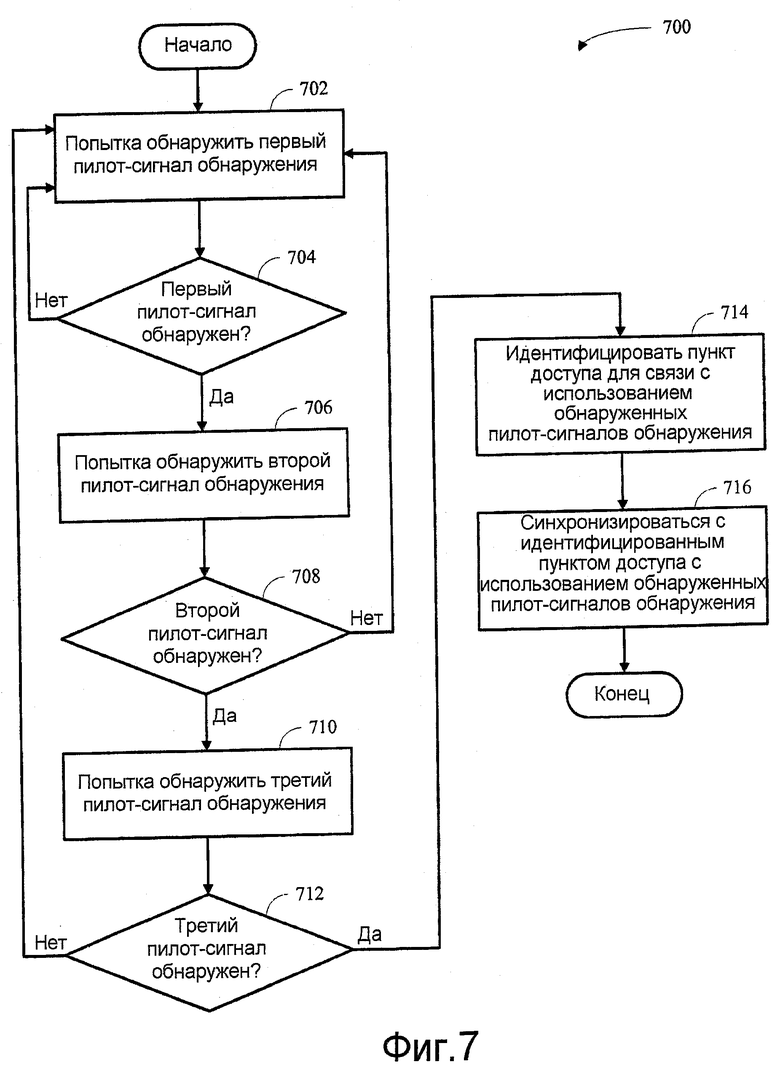
Фиг.7 - блок-схема способа для обнаружения сигнала в системе беспроводной связи.
Фиг.8 - блок-схема, иллюстрирующая примерную систему беспроводной связи, в которой могут функционировать один или более описанных вариантов осуществления.
Фиг.9 - блок-схема системы, которая координирует генерацию и передачу последовательностей пилот-сигналов в системе беспроводной связи в соответствии с различными аспектами.
Фиг.10 - блок-схема системы, которая координирует обнаружение сигнала в системе беспроводной связи в соответствии с различными аспектами.
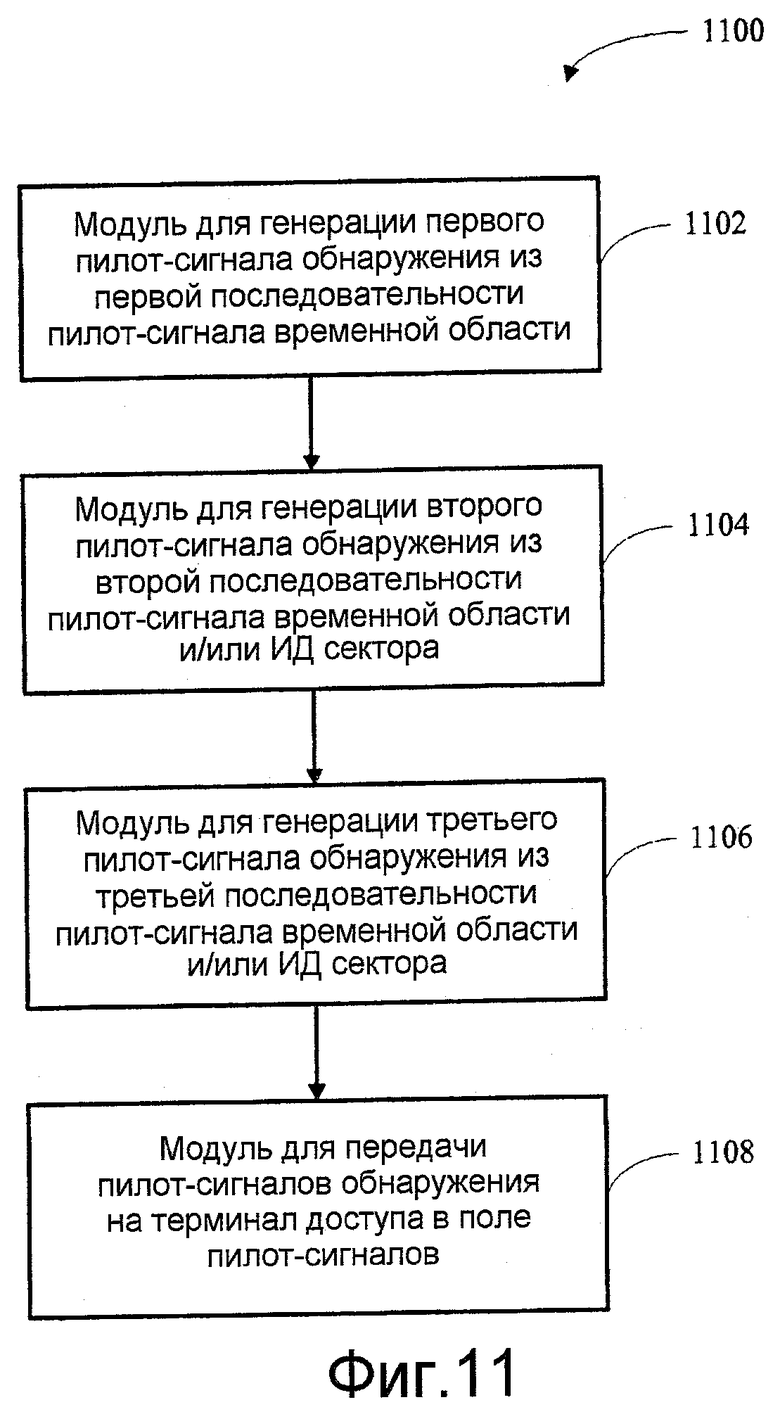
Фиг.11 - блок-схема устройства, которое обеспечивает генерацию и передачу пилот-сигналов обнаружения в системе беспроводной связи в соответствии с различными аспектами.
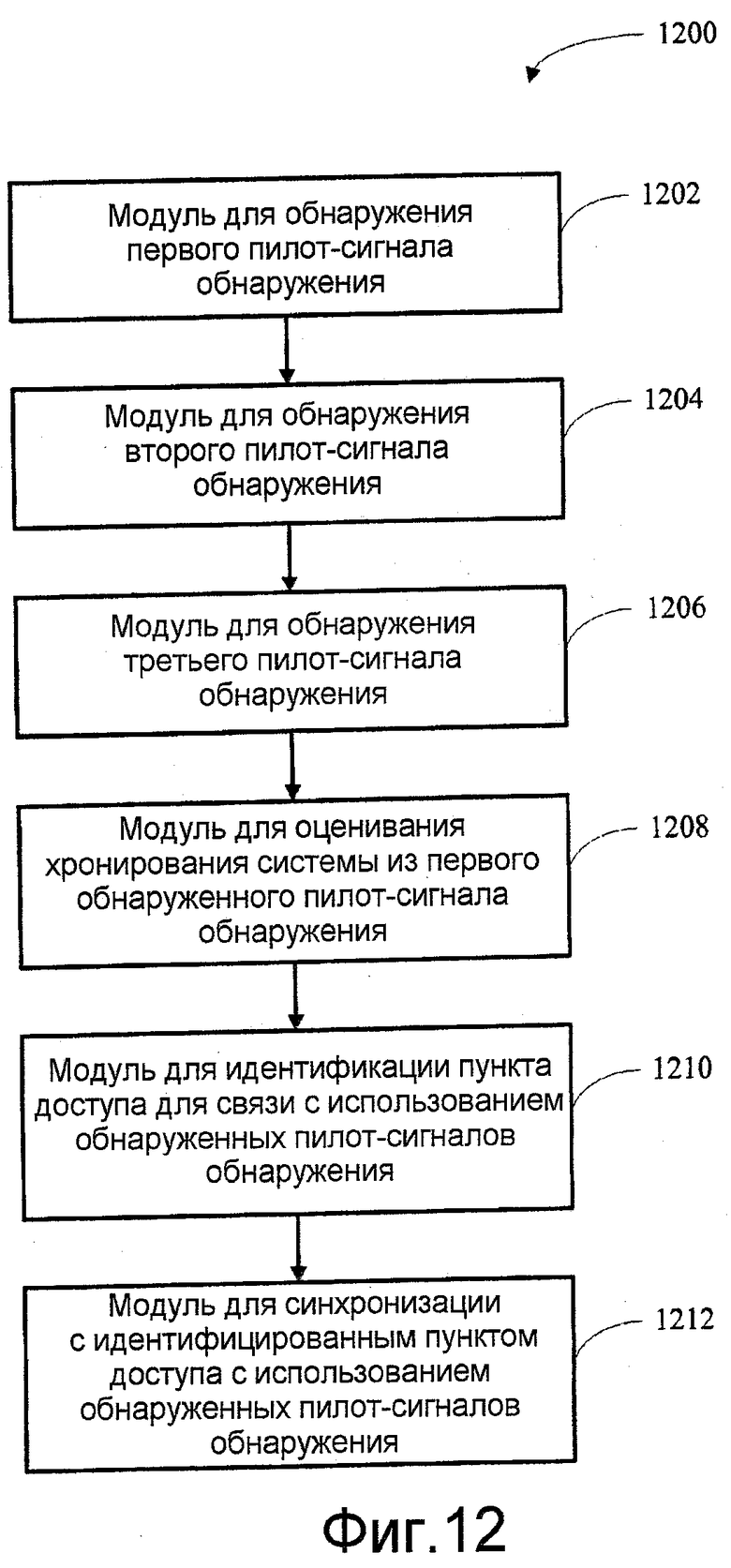
Фиг.12 - блок-схема устройства, которое обеспечивает обнаружение сигнала в системе беспроводной связи в соответствии с различными аспектами.
Детальное описание
Различные варианты осуществления описаны далее со ссылками на чертежи, на которых одинаковые ссылочные позиции используются для ссылки на сходные элементы на всех чертежах. В последующем описании, в целях объяснения, изложены многочисленные конкретные детали, чтобы обеспечить полное понимание одного или более аспектов. Однако очевидно, что такой(ие) вариант(ы) осуществления может (могут) быть осуществлен(ы) без использования таких конкретных деталей. В других случаях известные структуры и устройства показаны в форме блок-схемы, чтобы облегчить описание одного или более вариантов осуществления.
Используемые в настоящем описании термины "компонент", "модуль", "система" и т.п. предназначены для ссылки на связанный с компьютером объект, такой как аппаратное средство, программно-аппаратное средство, комбинация аппаратного средства и программного обеспечения, программное обеспечение и исполняемое программное обеспечение. Например, компонент может представлять собой, без ограничения указанным, процесс, исполняемый на процессоре, процессор, объект, исполняемый файл, поток управления, программу и/или компьютер. В качестве иллюстрации, компонентом может быть приложение, исполняемое на вычислительном устройстве, и вычислительное устройство. Один или более компонентов могут находиться в рамках процесса и/или потока управления, и компонент может быть локализован на одном компьютере и/или распределен между двумя или более компьютерами. Кроме того, эти компоненты могут исполняться с различных машиночитаемых носителей, хранящих различные структуры данных. Компоненты могут осуществлять связь посредством локальных и/или удаленных процессов, например, в соответствии с сигналом, имеющим один или более пакетов данных (например, данные от одного компонента, взаимодействующего с другим компонентом в локальной системе, распределенной системе и/или по сети, такой как Интернет, с другими системами посредством сигнала).
Кроме того, различные варианты осуществления описаны здесь в связи с беспроводным терминалом и/или базовой станцией. Беспроводный терминал может относиться к устройству, обеспечивающему голосовую связь и/или возможность соединения данных для пользователя. Беспроводный терминал может быть связан с вычислительным устройством, таким как ноутбук или настольный компьютер, или может быть автономным устройством, таким как персональный цифровой помощник (PDA). Беспроводный терминал может также называться системой, абонентским блоком, абонентской станцией, мобильной станцией, мобильным устройством, удаленной станцией, пунктом доступа, удаленным терминалом, терминалом доступа, пользовательским терминалом, пользовательским агентом, пользовательским устройством, или пользовательским оборудованием. Беспроводный терминал может быть абонентской станцией, беспроводным устройством, мобильным телефоном, телефоном системы персональной системы связи, радиотелефоном, телефоном Протокола инициирования сессии (SIP), станцией беспроводного локального шлейфа (WLL), PDA, портативным устройством, имеющим средства беспроводной связи или другим устройством обработки, связанным с беспроводным модемом. Базовая станция (например, пункт доступа) может относиться к устройству в сети доступа, которое осуществляет связь через радиоинтерфейс, через один или более секторов, с беспроводными терминалами. Базовая станция может действовать как маршрутизатор между беспроводным терминалом и остальной частью сети доступа, которая может включать в себя сеть Интернет-протокола (IP), преобразовывая принятые кадры радиоинтерфейса в IP-пакеты. Базовая станция также координирует управление атрибутами для радиоинтерфейса.
Кроме того, различные аспекты или признаки, описанные здесь, могут быть осуществлены как способ, устройство или продукт производства, используя стандартные методы программирования и/или проектирования. Термин "продукт производства", как он используется здесь, предназначен для включения в себя компьютерной программы, в которой может быть получен доступ с любого машиночитаемого устройства, носителя или среды. Например, машиночитаемые носители могут включать в себя, без ограничения указанным, магнитные устройства хранения (например, жесткий диск, дискета, магнитные полосы…), оптические диски (например, компакт-диск (CD), цифровой универсальный диск (DVD)…), смарт-карты и устройства флэш-памяти (например, карта, карта памяти (stick), портативное устройство памяти (key drive)…).
Различные варианты осуществления будут представлены в терминах систем, которые могут включать в себя ряд устройств, компонентов, модулей и т.п. Должно быть понятно, что различные системы могут включать в себя дополнительные устройства, компоненты, модули и т.д. и/или могут не включать в себя все устройства, компоненты, модули и т.д. описанные со ссылками на чертежи. Комбинация этих подходов может также использоваться.
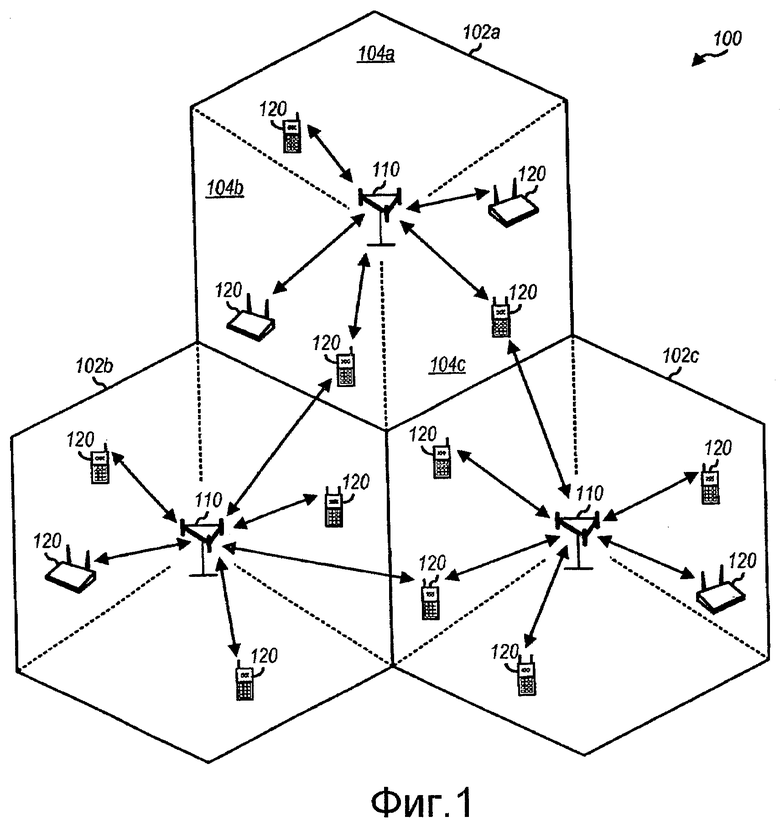
На фиг.1 представлена иллюстрация системы 100 беспроводной связи множественного доступа в соответствии с различными аспектами. В одном примере система 100 беспроводной связи множественного доступа содержит множество базовых станций 110 и множество терминалов 120. Кроме того, одна или более базовых станций 110 могут осуществлять связь с одним или более терминалами 120. В качестве неограничительного примера, базовая станция 110 может быть пунктом доступа, Узлом B и/или другим соответствующим сетевым объектом. Каждая базовая станция 110 обеспечивает охват связи для конкретной географической области 102. Как используется в настоящем описании и вообще в технике, термин "ячейка" может относиться к базовой станции 110 и/или ее области охвата 102, в зависимости от контекста, в котором использован термин. Чтобы улучшить пропускную способность системы, область 102 охвата, соответствующая базовой станции 110, может быть разделена на множество меньших областей (например, области 104a, 104b и 104c). Каждая из меньших областей 104a, 104b и 104c может обслуживаться соответствующей базовой приемопередающей подсистемой (BTS, не показана). Как используется в настоящем описании и вообще в технике, термин "сектор" может относиться к BTS и/или ее области охвата, в зависимости от контекста, в котором использован термин. В ячейке 102, имеющей множество секторов 104, BTS для всех секторов 104 из ячейки 102 могут быть расположены совместно в пределах базовой станции 110 для ячейки 102.
В соответствии с другим аспектом, терминалы 120 могут быть распределены по системе 100. Каждый терминал 120 может быть стационарным или мобильным. В качестве неограничительного примера, терминал 120 может быть терминалом доступа (АТ), мобильной станцией, пользовательским оборудованием, абонентской станцией и/или другим соответствующим сетевым объектом. Терминал может быть беспроводным устройством, сотовым телефоном, PDA, беспроводным модемом, портативным устройством или другим подходящим устройством.
В соответствии с одним аспектом, новое соединение для связи может быть установлено между базовой станцией 110 и терминалом 120, когда, например, терминал 120 включен или перемещается в новую ячейку 102 или сектор 104 в системе 100. Прежде чем терминал 120 сможет осуществлять связь базовой станцией 110 с использованием этого соединения, терминал 120 в общем случае должен определить информацию временных характеристик (хронирования) и идентификации для базовой станции 110 посредством процесса, известного как обнаружение. Чтобы помочь в обнаружении, базовая станция 110 может передать один или более пилот-сигналов обнаружения. Традиционно, базовая станция 110 может передавать пилот-сигналы обнаружения в форме маяков, псевдошумовых (PN) последовательностей в частотной области или обобщенных последовательностей с частотной модуляцией (GCL). Однако хотя как каждый из этих традиционных форматов пилот-сигналов обеспечивает различные преимущества в некоторых сценариях, все они имеют существенные недостатки. Например, маяки могут иметь очень низкую эффективность в системе с большими вариациями помех, PN последовательности в частотной области могут иметь плохие характеристики отношения максимума к среднему (PAR), последовательности GCL ограничены в числе и, следовательно, нуждаются в сетевом планировании. Соответственно, чтобы преодолеть недостатки, связанные с традиционными форматами пилот-сигналов, базовая станция 110 может использовать один или более пилот-сигналов временной области (например, пилот-сигналы, мультиплексированные с временным разделением (TDM)), чтобы облегчить обнаружение сигнала в соответствии с различными аспектами, описанными здесь.
В одном примере, система 100 может использовать одну или более схем множественного доступа, таких как CDMA, TDMA, FDMA, OFDMA, FDMA с единственной несущей (SC-FDMA), и/или другие подходящие схемы множественного доступа. OFDMA использует мультиплексирование с ортогональным частотным разделением (OFDM), и SC-FDMA использует мультиплексирование с частотным разделением с единственной несущей (SC-FDM). OFDM и SC-FDM могут разделять ширину полосы системы на множество ортогональных поднесущих (например, тона, элементы разрешения…), каждая из которых может модулироваться данными. Как правило, символы модуляции посылают в частотной области с OFDM и во временной области с SC-FDM. Дополнительно и/или альтернативно, ширина полосы системы может быть разделена на одну или более несущих частот, каждая из которых может содержать одну или более поднесущих. Система 100 может также использовать комбинацию схем множественного доступа, таких как OFDMA и CDMA. Дополнительно, система 100 может использовать различные структуры кадрирования, чтобы указать способ, которым данные и сигнализация передаются в прямой и обратной линиях связи. Для пояснения, но не для ограничения, примеры структур кадрирования, которые могут использоваться системой 100, описаны здесь более подробно.
На фиг.2 показана блок-схема системы 200, которая обеспечивает обнаружение сигнала в соответствии с различными описанными аспектами. В соответствии с одним аспектом система 200 может включать в себя один или более пунктов 210 доступа и один или более терминалов 220 доступа, которые могут осуществлять связь друг с другом по прямой линии связи и обратной линии связи. В одном примере пункт 210 доступа может осуществлять связь непосредственно с терминалом 220 доступа в области охвата системы 200 (например, ячейки 102). Альтернативно, один или более пунктов 210 доступа могут включать в себя одну или более групп 212 антенн, каждая из которых может осуществлять связь с терминалами 220 доступа в секторе (например, секторе 104) области охвата, соответствующей конкретному пункту 210 доступа. Далее, каждый пункт 210 доступа и/или группа 212 антенн могут включать в себя одну или более антенн 214-216, и каждый терминал 220 доступа может включать в себя одну или более антенн 222. Хотя только одна антенна 214-216 проиллюстрирована в каждом пункте 210 доступа и группе 212 антенн, и только одна антенна 222 проиллюстрирована в каждом терминале 220 доступа для краткости, понятно, что могло бы использоваться любое число антенн.
Новое соединение может быть установлено для связи между терминалом 220 доступа и пунктом 210 доступа или группой 212 антенн в системе 200 с помощью множества средств. Например, соединение может быть установлено, когда терминал 220 доступа первоначально включается, терминал 220 доступа активизируется для прерывистой передачи (DTX), терминал 220 доступа вступает в область покрытия пункта 210 доступа или группы 212 антенн, или другими подходящими средствами. В соответствии с одним аспектом терминал 220 доступа должен получить информацию, необходимую для связи с пунктом 210 доступа или группой 212 антенн, посредством процесса обнаружения, прежде чем такое соединение сможет быть установлено. Например, информация, полученная посредством процесса обнаружения, может относиться к информации хронирования и синхронизации для системы 200, информации хронирования и синхронизации для пункта 210 доступа или группы 212 антенн, идентичности пункта 210 доступа или группы 212 антенн и/или другой соответствующей информации.
В одном примере пункт 210 доступа или группа 212 антенн может предоставить информацию, запрошенную терминалом 220 доступа для связи, в одном или более пилот-сигналах обнаружения. Эти пилот-сигналы обнаружения могут тогда быть переданы на терминал 220 доступа посредством поля 230 пилот-сигналов. В качестве неограничительного примера, поле 230 пилот-сигналов может быть передано как один или более символов OFDM и может быть включено в преамбулу суперкадра или в один или более кадров суперкадра физического уровня. После приема поля 230 пилот-сигналов от пункта 210 доступа или группы 212 антенн терминал 220 доступа определит корреляцию относительно одного или более пилот-сигналов обнаружения в поле 230 пилот-сигналов, чтобы получить информацию, требуемую для связи с пунктом 210 доступа или группой 212 антенн. Корреляционная обработка, выполняемая терминалом 220 доступа, может быть, например, прямой (то есть, в реальном времени) корреляцией или задержанной корреляцией.
В соответствии с одним аспектом поле 230 пилот-сигналов может включать в себя три пилот-сигнала обнаружения (то есть, TDMl, TDM2 и TDM3). В одном примере первый пилот-сигнал обнаружения (TDMl) может быть периодической последовательностью с предопределенной длиной, соответствующей нескольким периодам. В другом примере TDMl может быть общим для всех пунктов 210 доступа и групп 212 антенн в системе 200, чтобы предоставить общую информацию хронирования для системы 200. В таком примере терминал 220 доступа может интерпретировать общую последовательность TDMl, переданную из множества пунктов 210 доступа и/или групп 212 антенн, как многолучевые составляющие того же самого сигнала. Таким образом, общий сигнал TDMl может дополнительно быть использован, чтобы уменьшить влияние помех в системе 200. Дополнительно и/или альтернативно, TDMl может генерироваться как последовательность временной области или как последовательность частотной области с особенно низким отношением максимума к среднему (PAR), такая как обобщенная GCL- последовательность или Chu-последовательность, таким образом, позволяя эффективно повысить TDMl по мощности.
В соответствии с другим аспектом второй пилот-сигнал обнаружения (TDM2) и третий пилот-сигнал обнаружения (TDM3) может иметь равную длину. Далее, длина TDM2 и TDM3 может соответствовать длине одного периода TDMl. В одном примере TDM2 и TDM3 могут генерироваться пунктом 210 доступа и/или группой 212 антенн, основываясь, по меньшей мере, частично на идентификаторе для объекта, который выполняет генерацию. Соответственно, TDM2 и TDM3 могут быть использованы, чтобы предоставить информацию идентификации для объекта, который генерировал последовательности. Далее, TDM2 и TDM3 могут также быть использованы, чтобы предоставить информацию хронирования конкретно для объекта, который генерировал последовательности. В другом примере TDM2 и TDM3 могут также генерироваться с использованием различных частей идентификатора для генерирующего объекта, чтобы позволить терминалу 220 доступа, который принимает TDM2 и TDM3, выполнять иерархический поиск пункта 210 доступа и/или группы 212 антенн, которые генерировали сигнал. В качестве конкретного неограничительного примера, TDM2 может генерироваться с использованием только некоторых битов идентификатора для генерирующего объекта, а TDM3 может генерироваться с использованием всех битов идентификатора. В другом примере последовательности Уолша могут также использоваться для TDM2 и TDM3, чтобы позволить терминалу 220 доступа выполнять эффективную корреляционную обработку относительно полей 230 пилот-сигналов, принятых от многих пунктов 210 доступа и/или групп 212 антенн, с использованием преобразования Уолша-Адамара. Общий код скремблирования может также применяться к TDM2 и TDM3, чтобы уменьшить эффект взаимной корреляции между полями 230 пилот-сигналов.
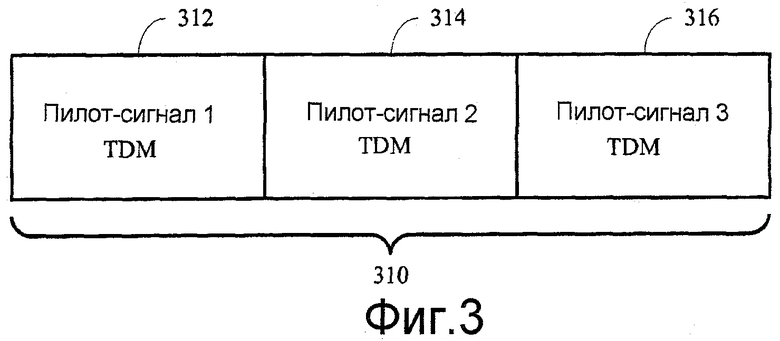
На фиг.3 показана иллюстрация примерного поля 310 пилот-сигналов TDM в соответствии с различными аспектами. В одном примере поле 310 пилот-сигналов TDM может быть использовано в связи со схемой передачи пилот-сигналов и данных прямой линии связи в системе беспроводной связи (например, системе 100). В такой схеме передачи каждая базовая станция (например, каждая базовая станция 110) в системе может передавать пилот-сигналы в кадрах, суперкадрах, преамбулах суперкадра и/или любыми другими соответствующими средствами в прямой линии связи. В соответствии с одним аспектом, поле 310 пилот-сигналов может включать в себя пилот-сигналы TDM 312, 314 и 316, каждый из которых может использоваться для обнаружения (например, терминалом 120 доступа).
В одном примере пилот-сигнал 1 TDM (312) может быть последовательностью с полной длиной NFFT элементарных посылок. В другом примере каждый сектор (например, каждая базовая станция 120 и/или сектор 104) в системе могут использовать ту же самую последовательность для пилот-сигнала 1 TDM. В таком примере последовательности пилот-сигналов, переданные из различных секторов, могут представляться как многолучевые составляющие той же самой последовательности терминалу доступа, который принимает последовательности пилот-сигналов. Кроме того, терминалу доступа в таком примере может только потребоваться обнаруживать хронирование одной последовательности пилот-сигналов, чтобы определить хронирование системы. Соответственно, использование общей последовательности для пилот-сигнала 1 TDM может позволить определять хронирование системы с меньшей сложностью, чем потребовалось бы для определения хронирования множества последовательностей, как может потребоваться, если общая последовательность для пилот-сигнала 1 TDM не используется. В соответствии с другим аспектом, где каждый сектор в системе использует общую последовательность для пилот-сигнала 1 TDM, передача пилот-сигнала 1 TDM в каждом секторе может быть синхронной или асинхронной.
В другом примере пилот-сигнал 1 TDM может быть периодическим во времени или, альтернативно, занимать "гребенку" по частоте. Например, пилот-сигнал 1 TDM может быть периодическим в преамбуле суперкадра, по всему суперкадру, в кадре или в преамбуле кадра. Пилот-сигнал 1 TDM может также иметь предопределенную длину, соответствующую NPERIODS периодов, где NPERIODS - предопределенное целочисленное значение. В соответствии с одним аспектом, пилот-сигнал 1 TDM может генерироваться с множеством периодов для содействия в исправлении ошибок частоты в терминале доступа за счет обеспечения использования способов, таких как задержанная корреляция и/или преобразование Фурье (FFT) меньшего размера, терминалом доступа. В другом примере псевдошумовая (PN) последовательность длины NFFT/NPERIODS может быть выбрана для каждого периода пилот-сигнал 1 TDM. Альтернативно, GCL- или Chu-последовательность может использоваться вместо PN- последовательности. Кроме того, скремблирование на основе гибридной фазовой манипуляции (HPSK) может использоваться для пилот-сигнала 1 TDM, чтобы уменьшить отношение максимума к среднему (PAR) пилот-сигнала 1 TDM, таким образом обеспечивая более эффективное повышение мощности.
В соответствии с другим аспектом, пилот-сигнал 2 TDM (314) и пилот-сигнал 3 TDM (316) могут быть зависимыми от сектора PN-последовательностями. В одном примере пилот-сигнал 2 TDM и пилот-сигнал 3 TDM могут быть выбраны способом, который позволяет выполнять иерархический поиск. Например, пилот-сигнал 2 TDM может генерироваться, основываясь на части битов идентификатора сектора, в то время как пилот-сигнал 3 TDM может генерироваться, основываясь на всех битах идентификатора сектора. Таким образом, пилот-сигнал 2 TDM может быть общим для части секторов в системе, в то время как пилот-сигнал 3 TDM является уникальным для каждого индивидуального сектора. В другом примере HPSK-скремблирование может также использоваться для пилот-сигнала 2 TDM и пилот-сигнала 3 TDM, чтобы уменьшить PAR пилот-сигналов и повысить эффективность усиления мощности. В другом примере последовательности Уолша могут также использоваться для пилот-сигнала 2 TDM и пилот-сигнала 3 TDM, чтобы позволить терминалу доступа выполнять эффективную корреляционную обработку с последовательностями пилот-сигналов из множества секторов, например, с использованием преобразования Уолша-Адамара. Дополнительно, чтобы противодействовать взаимно-корреляционным свойствам последовательностей Уолша, код скремблирования может быть применен к кодам Уолша для пилот-сигнала 2 TDM и пилот-сигнала 3 TDM, который является независимым от секторов в системе.
Понятно, что размеры пилот-сигналов TDM 312-316 могут быть одинаковыми или отличающимися от размеров символов данных, используемых в системе. Далее, понятно, что циклический префикс или заполнение нулями могут использоваться или не использоваться для пилот-сигналов TDM 312-316. Кроме того, как используется здесь, PN-последовательность может быть любой последовательностью элементарных посылок, которая может генерироваться любым способом. Например, PN-последовательность может генерироваться генераторным полиномом. Как дополнительный пример, PN-последовательность для каждой базовой станции (например, каждого сектора) может также быть кодом скремблирования, используемым для рандомизации данных. В этом примере пилот-сигналы TDM 312-316 могут генерироваться применением кода скремблирования к последовательности всех единиц или всех нулей.
В соответствии с одним аспектом терминал может использовать пилот-сигнал 1 TDM, чтобы обнаружить присутствие сигнала, получить грубое хронирование и/или оценочную ошибку частоты. Терминал может тогда использовать пилот-сигналы 2 и 3 TDM, чтобы идентифицировать конкретную базовую станцию, передающую пилот-сигнал-сигналы TDM, и получить более точное хронирование или синхронизацию по времени. В более общем случае, обнаружение может включать в себя обнаружение пилот-сигнала 1 TDM, обнаружение пилот-сигнала 2 TDM, если пилот-сигнал 1 TDM обнаружен, и затем, наконец, обнаружение пилот-сигнала 3 TDM, если пилот-сигнал 2 TDM обнаружен. В одном примере пилот-сигнал 1 TDM может быть периодическим во временной области, таким образом позволяя терминалу определять корреляцию по отношению к периодичности пилот-сигнала 1 TDM (например, ряду периодов).
В качестве конкретного примера, терминал может определять корреляцию относительно пилот-сигнала 1 TDM следующим образом. Сначала терминал может определить функцию X(k), где:
Таким образом, в примере, где NPERIODS = 2, только поднесущие с четными номерами будут иметь значения, отличные от нуля. Это может быть выражено следующим образом:
где TDMl имеет два периода, каждый период обозначен STDM1(t). Приемник может тогда использовать вышеуказанное, используя FFT размера NFFT/2, чтобы определять корреляцию относительно каждого периода TDMl. Функция y(t) может тогда быть определена как принятая последовательность во временном окне длины NFFT/2, и функция Y(f), может быть определена как соответствующее FFT размера NFFT/2. При использовании этих функций терминал может найти нормализованную корреляцию с STDM1(t) в окне FFT с использованием следующего уравнения:
Терминал может затем некогерентно объединить корреляцию, полученную в Уравнении (3) с корреляцией, полученной из следующего окна FFT, то есть, Corr(t+NFFT/2). Объединенная корреляция тогда может также быть нормализована полной принятой мощностью. Если объединенная корреляция больше, чем предопределенный порог, то терминал может установить, что одна составляющая TDMl обнаружена. Терминал может тогда использовать эту гипотезу хронирования, чтобы последовательно коррелировать пилот-сигнал 2 TDM и пилот-сигнал 3 TDM. Если подобная объединенная корреляция для пилот-сигнала 2 TDM и пилот-сигнала 3 меньше, чем предопределенный порог, то терминал может установить, что соответствующий(е) пилот-сигнал(ы) не был(и) обнаружен(ы), и перейти к следующей гипотезе хронирования (например, для t=t+1), причем вышеупомянутая процедура может быть повторена.
В другом неограничительном примере терминал может вычислить вышеупомянутые корреляции для пилот-сигнала 1 TDM, эффективно используя подход на основе FFT. Например, каждая из корреляций от Corr(t) до Corr(t+NFFT/2-1) может быть аппроксимирована в единственном проходе путем вычисления IFFT[STDM1(f)Y(f)]. Терминал может затем сравнить каждое из значений, или альтернативно выбранное число сильных составляющих, с предопределенным порогом. Любые временные выборки, для которых нормализованная корреляция превышает порог, могут затем использоваться для обнаружения пилот-сигнала 2 TDM и пилот-сигнала 3 TDM. Дополнительно, в конкретном неограничительном примере, где пилот-сигнал 2 TDM и пилот-сигнал 3 TDM созданы с использованием последовательности Уолша, может использоваться преобразование Уолша-Адамара низкой сложности, чтобы выполнять корреляционную обработку последовательностей, принятых из нескольких секторов сразу.
В другом примере, для каждой оценки хронирования, обеспечиваемой пилот-сигналом 1 TDM, а также каждой гипотезой возможного сектора, соответствующая последовательность пилот-сигнала 2 TDM может коррелироваться с принятой последовательностью. Если корреляция больше, чем предопределенный порог, процесс обнаружения может продолжаться путем корреляции с пилот-сигналом 3 TDM, что может выполняться идентично корреляции для пилот-сигнала 2 TDM. Если корреляция пилот-сигнала 3 TDM также проходит предопределенный порог при определенной гипотезе хронирования, то терминал может установить, что сектор был обнаружен с точным хронированием сектора, совпадающего с гипотезой хронирования.
В соответствии с одним аспектом пилот-сигналы TDM 312-316 могут также использоваться для коррекции ошибок частоты. Например, в отсутствие ошибки частоты и шума, Corr(t) была бы той же самой, что и Corr(t+NFFT/2). Однако ошибка частоты может присутствовать в терминале из-за, например, несоответствия тактовых сигналов между пунктом доступа и терминалом, заставляя применять пилообразное изменение фазы к принятому сигналу в терминале. Таким образом, терминал может сравнить фазы Corr(t) и Corr(t+NFFT/2) и оценить ошибку частоты. Дополнительно, терминал может затем также исправить ошибку частоты, применяя уравновешивающее пилообразное изменение фазы.
Фиг.4A иллюстрирует примерную структуру 402 суперкадра для системы беспроводной связи множественного доступа (например, системы 100), использующей дуплексный режим с частотным разделением (FDD). В одном примере преамбула 412 суперкадра передается в начале каждого суперкадра 410. Альтернативно, преамбула 412 суперкадра может быть рассредоточена в пределах суперкадра 410 как преамбула и промежуточная часть (midamble). Хотя суперкадр 410 проиллюстрирован как суперкадр прямой линии связи (FL), понятно, что суперкадр 410 мог бы альтернативно быть суперкадром обратной линии связи.
В одном примере, каждый суперкадр 410 может состоять из преамбулы 412 суперкадра, сопровождаемой рядом кадров 414. В структуре 402 FDD, передача обратной линии связи и передача прямой линии связи могут занимать различные частоты таким образом, что передачи на прямой и обратной линиях связи, по существу, перекрываются на любой данной поднесущей частоты. В соответствии с одним аспектом преамбула 412 суперкадра может охватывать одну несущую в пределах полной ширины полосы системы и может скачкообразно изменяться на каждый суперкадр 410, по множеству суперкадров 410, в течение фиксированного интервала времени или другого соответствующего интервала. Далее, преамбула 412 суперкадра может скачкообразно изменяться согласно последовательности или шаблону скачкообразного изменения. Последовательность или шаблон скачкообразного изменения могут быть определены терминалом доступа (например, терминалом 120), например, из идентификатора для пункта доступа (например, базовой станции 110), например, как последовательность (PN). Альтернативно, преамбула 412 суперкадра можно не изменяться скачкообразно и может охватывать все несущие в пределах ширины полосы системы или только одну несущую.
В другом примере, преамбула 412 суперкадра может содержать пилотный канал, который может включать пилот-сигналы, которые могут использоваться для оценки канала терминалами доступа. Далее, преамбула 412 суперкадра может включать в себя широковещательный канал, который включает в себя информацию конфигурации, которую терминал доступа (например, терминал 120) может использовать для демодуляции информации, содержащейся в кадре 414 прямой линии связи. Дополнительно и/или альтернативно, преамбула 412 суперкадра может включать в себя информацию обнаружения, такую как хронирование, и другую информацию, достаточную для терминала доступа, чтобы осуществлять связь, информацию управления мощностью и/или информацию смещения. Таким образом, преамбула 412 суперкадра может содержать одно или более из общего пилотного канала, широковещательного канала, включающего в себя информацию системы и конфигурации; канал пилот-сигнала обнаружения, используемый для получения хронирования и другой информации; и канал помехи в секторе, включающий в себя указатели из сектора об измеренной в нем помехе относительно других секторов. В одном примере пилотный канал может включать в себя пилот-сигналы 1, 2 и 3 TDM (например, пилот-сигналы TDM 312-316). Альтернативно, пилот-сигналы TDM могут находиться в преамбуле 412 суперкадра не как канал или могут находиться в другой части суперкадра 410.
В соответствии с одним аспектом за преамбулой 412 суперкадра может следовать последовательность кадров 414. Каждый кадр 414 может состоять из регулярного или нерегулярного количества символов OFDM и регулярного или нерегулярного количества поднесущих, которые могут одновременно быть использованы для передачи. В одном примере каждый кадр 414 может действовать в соответствии с режимом 422 скачкообразного изменения скорости символов, причем один или более несмежных символов OFDM назначаются терминалу в прямой линии связи или в обратной линии связи. Альтернативно, каждый кадр 414 может действовать в соответствии с режимом 420 блочного скачкообразного изменения, причем терминалы могут выполнять скачкообразное изменение в пределах блока символов OFDM. И в режиме скачкообразного изменения скорости символов, и в режиме блочного скачкообразного изменения, блоки или символы OFDM могут или не могут скачкообразно изменяться между кадрами 414.
В соответствии с другим аспектом суперкадр 410 может не использовать преамбулу 412 суперкадра. В одной альтернативе преамбула может быть предусмотрена для одного или более кадров 414, которые включают в себя информацию, эквивалентную преамбуле 412 суперкадра. В другой альтернативе широковещательный канал управления может использоваться, чтобы содержать некоторую или всю информацию преамбулы 412 суперкадра. Другая информация может дополнительно содержаться в преамбуле или канале управления кадра 414.
Фиг.4B иллюстрирует примерную структуру 404 суперкадра для системы беспроводной связи множественного доступа, использующей дуплексный режим с временным разделением (TDD). В одном примере преамбула 412 суперкадра может быть передана в начале каждого суперкадра 410, который, по существу, подобен по структуре и характеристикам преамбуле 412 суперкадра в структуре FDD 402. В соответствии с одним аспектом каждая преамбула 412 суперкадра в структуре 404 TDD может сопровождаться последовательностью кадров 414 прямой линии связи и кадров 416 обратной линии связи. Кадры 414 прямой линии связи и кадры 416 обратной линии связи могут быть разделены во времени таким образом, что предопределенное число кадров 414 прямой линии связи непрерывно передается перед разрешением передачи предопределенного числа кадров 416 обратной линии связи. Как проиллюстрировано в структуре 404 суперкадра, суперкадр 410 прямой линии связи будет иметь время молчания во время передачи одного или более кадров 416 обратной линии связи. Точно так же понятно, что суперкадр обратной линии связи будет иметь время молчания в течение передачи кадров 414 прямой лини связи. Далее, понятно, что любое число кадров 414 прямой линии связи и любое число кадров 416 обратной линии связи могут непрерывно передаваться в структуре 404 суперкадра, и что упомянутое число кадров может изменяться в пределах данного суперкадра или между суперкадрми.
Кроме того, каждый кадр 414 прямой линии связи может состоять из регулярного или нерегулярного количества символов OFDM и регулярного или нерегулярного количества поднесущих, которые могут одновременно быть использованы для передачи аналогично кадрам 414 в структуре 402 FDD. В одном примере каждый кадр 414 прямой линии связи может работать в соответствии с режимом 422 скачкообразного изменения скорости символов, причем один или более несмежных символов OFDM назначаются терминалу в прямой линии связи или в обратной линии связи. Альтернативно, каждый кадр 414 может работать в соответствии с режимом 420 блочного скачкообразного изменения, причем терминалы могут выполнять скачкообразное изменение в пределах блока символов OFDM. И в режиме 422 скачкообразного изменения скорости символов, и в режиме 420 блочного скачкообразного изменения блоки или символы OFDM могут или не могут скачкообразно изменяться между кадрами 414.
В соответствии с одним аспектом суперкадр 410 может не использовать преамбулу 412 суперкадра. В одной альтернативе преамбула может быть предусмотрена для одного или более кадров 414, которые включают в себя информацию, эквивалентную преамбуле 412 суперкадра. Эта информация может включать в себя, например, пилот-сигналы 1, 2 и 3 TDM. В другой альтернативе широковещательный канал управления может использоваться, чтобы содержать некоторую или всю информацию преамбулы 412 суперкадра. Другая информация может дополнительно содержаться в преамбуле или канале управления кадра 414.
Фиг.5A иллюстрирует примерную схему 510 синхронной передачи пилот-сигнала прямой линии связи в соответствии с различными аспектами. В соответствии с одним аспектом система беспроводной связи (например, система 100) может использовать схему 510 передачи, когда каждая базовая станция (например, каждая базовая станция 110) в системе является синхронной и передает свои пилот-сигналы TDM (например, пилот-сигналы 312-316 TDM) в то же самое время. Как проиллюстрировано схемой 510 передачи, каждая базовая станция в системе может передавать пилот-сигналы TDM в форме PN-последовательности 516 в одном или более кадрах 514 на временной оси 512 передачи, соответствующей каждой конкретной базовой станции. Таким образом, терминал (например, терминал 120) может принимать пилот-сигналы TDM от всех базовых станций в системе в приблизительно то же самое время. Любое отклонение хронирования между базовыми станциями могло бы быть обусловлено различиями в задержках распространения и/или другими факторами. В соответствии с одним аспектом синхронизация пилот-сигналов TDM от различных базовых станций позволяет избежать влияния помех, вызванных пилот-сигналами TDM от одной базовой станции, на передачи данных другими базовыми станциями. Избегая таких помех, можно улучшить эффективность детектирования данных в системе. Кроме того, можно избежать помех со стороны передачи данных на пилот-сигналы TDM, таким образом повышая эффективность обнаружения.
Фиг.5B иллюстрирует примерную схему 520 смещенной (ступенчатой) передачи пилот-сигнала прямой линии связи в соответствии с различными аспектами. Схема 520 передачи может быть использована, например, когда базовые станции в системе синхронны, но передают своих пилот-сигналы TDM в разное время в пределах кадров 524 своих соответствующих временных осей 522 передачи, так что пилот-сигналы TDM являются ступенчатыми во времени. В одном примере базовые станции могут, следовательно, быть идентифицированы к тому времени, в которое они передают свои пилот-сигналы TDM. В соответствии с одним аспектом та же самая PN-последовательность 526 может использоваться для всех базовых станций. Поскольку каждая базовая станция может использовать ту же самую PN-последовательность 526, обработка, требуемая для обнаружения сигнала в каждом терминале, может быть значительно уменьшена. Однако передачи пилот-сигналов от каждой базовой станции могут испытывать помехи со стороны передач данных соседних базовых станций.
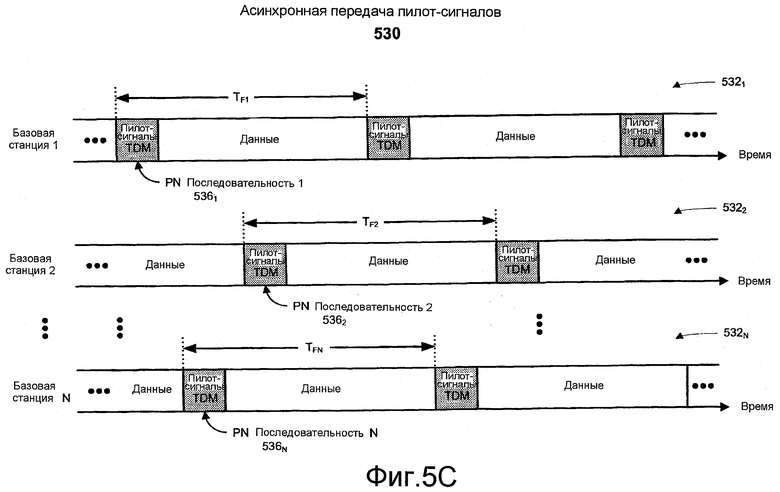
Фиг.5C иллюстрирует пример схемы 530 асинхронной передачи пилот-сигналов прямой линии связи в соответствии с различными аспектами. Схема 530 передачи может быть использована, например, когда базовые станции в системе являются асинхронными, и каждая базовая станция передает свои пилот-сигналы 536 TDM согласно своей соответствующей временной оси 522 передачи, основываясь на своем независимом хронировании. Таким образом, пилот-сигналы TDM от различных базовых станций могут поступать в терминал в разное время.
Фиг.5D иллюстрирует примерную схему 540 изменяющейся во времени передачи пилот-сигнала прямой линии связи в соответствии с различными аспектами. Схема 540 передачи может быть использована, например, путем назначения каждой базовой станции в системе набора из MB PN1-последовательностей 546 для пилот-сигнала 1 TDM, где MB> 1. Каждая базовая станция может тогда использовать одну PN1-последовательность 546 для каждого кадра 544 на своей соответствующей временной оси 542 передачи и циклически перестраиваться по MB PN-последовательностям в MB кадрах 544. В одном примере схема 540 изменяющейся во времени передачи может использоваться как альтернатива схеме 510 синхронной передачи. Как отмечено выше относительно схемы 510 синхронной передачи, передачи пилот-сигналов TDM от каждой базовой станции могут испытывать те же самые помехи от передач пилот-сигналов TDM от соседних базовых станций в каждом кадре 514. Таким образом, усреднение пилот-сигналов TDM по множеству кадров 514 может не обеспечить усреднение выигрыша, так как та же самая помеха присутствует в каждом кадре. Чтобы обеспечить усреднение выигрыша, помеха может варьироваться за счет изменения пилот-сигналов TDM в кадрах 544, как проиллюстрировано посредством схемы 540 изменяющейся во времени передачи.
В одном примере различным основным станциям можно назначить различные наборы из MB PNl-последовательностей 546. Набор из MВ PNl-последовательностей 546, назначенный каждой базовой станции, может дополнительно рассматриваться как "длинный код", который охватывает множество кадров 544. Соответственно, каждая из MB PNl-последовательностей 546 в каждом наборе может рассматриваться как сегмент длинного кода и может генерироваться с различным начальным значением для длинного кода. Чтобы уменьшить сложность обработки в терминале, тот же самый длинный код может использоваться для всех базовых станций, и каждой базовой станции можно назначить различное смещение длинного кода. Например, базовой станции i может быть назначено смещение ki длинного кода, где ki находится в диапазоне от 0 до MB-1. Таким образом, PNl-последовательности 546 для базовой станции i, начинающиеся в назначенном кадре 544, могут тогда быть заданы как PN1ki, PN1ki+1, PN1ki+2 и так далее. После того как PNl-последовательность 546 или смещение длинного кода обнаружено, обнаруженная PNl-последовательность 546 или смещение длинного кода может использоваться вместе с кадром, в котором PNl- последовательность 546 была обнаружена, относительно назначенного кадра, чтобы идентифицировать набор PNl-последовательностей 546, которому принадлежит обнаруженная PNl- последовательность 546.
На фиг.6-7 показаны способы для обнаружения сигнала в системе беспроводной связи. Хотя в целях простоты объяснения способы показаны и описаны как ряд действий, должно быть понятно, что способы не ограничены порядком действий, поскольку некоторые действия, в соответствии с одним или более вариантами осуществлениями, могут осуществляться в другом порядке и/или одновременно с другими действиями из показанного и описанного здесь. Например, специалистам должно быть понятно, что способ может быть альтернативно представлен как ряд взаимосвязанных состояний или событий, как на диаграмме состояний. Кроме того, не все проиллюстрированные действия могут потребоваться для осуществления способа в соответствии с одним или более вариантами осуществления.
На фиг.6 проиллюстрирован способ 600 для генерации и передачи пилот-сигналов обнаружения (например, пилот-сигналов 312-316 TDM) в системе беспроводной связи (например, системе 200). Способ 600 может быть выполнен, например, базовой станцией (например, базовой станцией 210) и/или группой антенн (например, группой 212 антенн) в системе. Способ 600 начинается в блоке 602, в котором первая последовательность пилот-сигнала (например, пилот-сигнал 1 TDM (312)) генерируется на основе первой последовательности пилот-сигнала временной области. В одном примере каждый объект в системе, которая выполняет способ 600, может генерировать первый пилот-сигнал обнаружения, основываясь на общей первой последовательности пилот-сигнала, в блоке 602. Это может быть сделано, например, чтобы минимизировать эффекты помех в одном или более терминалах (например, терминалах доступа 220) в системе и/или позволить первой последовательности пилот-сигнала предоставлять общую информацию хронирования для системы. Далее, первый пилот-сигнал обнаружения может генерироваться во временной области, или альтернативно он может генерироваться в частотной области таким образом, что он имеет отношение максимума к среднему ниже предопределенного порога, чтобы обеспечить эффективное повышение мощности последовательности.
После того, как первый пилот-сигнал обнаружения сгенерирован в блоке 602, способ 600 переходит к блоку 604, где генерируется второй пилот-сигнал обнаружения (например, пилот-сигнал 2 TDM (314)), основываясь на второй последовательности пилот-сигнала временной области. Способ 600 может затем перейти к блоку 606, где генерируется третий пилот-сигнал обнаружения (например, пилот-сигнал 3 TDM (316)), основываясь на третьей последовательности пилот-сигнала временной области. В одном примере второй и третий пилот-сигналы обнаружения могут быть, соответственно, сгенерированы в блоках 604 и 606, дополнительно основываясь на идентификаторе сектора (например, идентификаторе для базовой станции 210 или терминала 212 доступа, выполняющих способ 600). Путем генерирования второго и третьего пилот-сигналов обнаружения с использованием идентификатора сектора второй и третий пилот-сигналы обнаружения могут предоставить информацию идентичности для объекта, который генерировал пилот-сигналы. Далее, второй и третий пилот-сигналы могут также быть сгенерированы таким образом, что терминал, который принимает пилот-сигнал, может выполнить иерархический поиск объекта, который создал пилот-сигналы. Например, второй пилот-сигнал может быть основан на части битов в идентификаторе сектора, а третий пилот-сигнал может быть основан на всех битах идентификатора сектора. В другом примере второй и третий пилот-сигнал-сигналы могут быть сгенерированы во временной области или, альтернативно, они могут быть сгенерированы в частотной области, подобно тому, как первый пилот-сигнал генерировался в блоке 602. После того, как первый, второй и третий пилот-сигналы, соответственно, сгенерированы в блоках 602, 604 и 606, они могут быть переданы в поле пилот-сигналов (например, в поле 230 пилот-сигналов) на терминал в блоке 608.
Фиг.7 иллюстрирует способ 700 для обнаружения сигнала в системе беспроводной связи (например, системе 200). Способ 700 может быть выполнен, например, терминалом (например, терминалом доступа 220) в системе. Способ 700 начинается в блоке 702, где делается попытка обнаружить первый пилот-сигнал обнаружения. Затем в блоке 704 определяется, был ли обнаружен первый пилот-сигнал. Это определение может быть сделано, например, с использованием алгоритмов для формулировки гипотезы обнаружения и хронирования сигнала, описанной выше со ссылкой на фиг.3. Если в блоке 704 определено, что первый пилот-сигнал не был обнаружен, способ 700 возвращается к блоку 702, чтобы продолжить поиск первого пилот-сигнала.
Если, однако, первый пилот-сигнал обнаружен, способ переходит к блоку 706, где делается попытка обнаружить второй пилот-сигнал обнаружения. В одном примере попытка обнаружения, выполняемая в блоке 706, может предусматривать поиск оцененного поля пилот-сигналов, соответствующего обнаруженному первому пилот-сигналу. Затем в блоке 708 определяется, обнаружен ли второй пилот-сигнал. Если второй пилот-сигнал не обнаружен, способ 700 возвращается в блок 702 для поиска нового поля пилот-сигналов. Если второй пилот-сигнал обнаружен, затем может делаться попытка обнаружить третий пилот-сигнал обнаружения в блоке 710. В одном примере попытка обнаружения, выполняемая в блоке 710, может предусматривать поиск того же самого оцененного поля пилот-сигналов, использованного в блоке 706. Способ 700 затем переходит к блоку 712, где выполняется определение, был ли обнаружен третий пилот-сигнал. Если третий пилот-сигнал не был обнаружен, способ 700 может возвратиться к блоку 702 для поиска новых пилот-сигналов.
В соответствии с одним аспектом, если в блоке 712 определено, что третий пилот-сигнал был обнаружен, то объект, выполняющий способ 700, может тогда начать связь с пунктом доступа, основываясь на информации обнаружения, содержащейся в трех обнаруженных пилот-сигналах обнаружения. Более определенно, способ 700 может перейти к блоку 714 после положительного определения в блоке 712, где идентифицируется пункт доступа для связи с использованием обнаруженных пилот-сигналов. Пункт доступа, идентифицированный в блоке 714, может быть, например, пунктом доступа, который передал пилот-сигналы, принятые в блоках 702-712. В одном примере пилот-сигналы могут содержать информацию, касающуюся идентификатора для пункта доступа, и пункт доступа может быть идентифицирован на основании этой информации. Способ 700 может затем завершиться в блоке 716, причем объект, выполняющий способ 700, может синхронизироваться с пунктом доступа, идентифицированным в блоке 714, на основе обнаруженных пилот-сигналов. В одном примере пилот-сигналы, принятые в блоках 702-712, могут содержать информацию относительно хронирования системы и/или хронирования идентифицированного пункта доступа, и на основе этой информации может быть достигнута синхронизация с идентифицированным пунктом доступа.
На фиг.8 показана блок-схема, иллюстрирующая примерную систему 800 беспроводной связи, в которой могут функционировать один или более описанных вариантов осуществления. В одном примере система 800 может включать в себя базовую станцию 110x и терминал 120x, которые могут соответствовать базовой станции 110 и терминалу 110 в системе 100. В соответствии с одним аспектом базовая станция 110x может включать в себя процессор 810 данных передачи (ТХ). Процессор 810 TX-данных может принимать данные одного или более типов (например, данные трафика, пакетные данные, служебную нагрузку и/или данные управления) и обрабатывать (например, кодировать, перемежать и/или отображать на символы) принятые данные для генерации символов данных. Как используется здесь, "символ данных" относится к символу модуляции для данных, а "символ пилот-сигнала" относится к символу модуляции для пилот-сигнала (который может быть, например, данными, известными априорно базовой станции 110x и терминалу 120x). Далее, как используется здесь и вообще в технике, символ модуляции - это комплексное значение для точки в сигнальном созвездии для схемы модуляции (например, М-PSK, М-QAM, …). Модулятор 820 OFDM может затем мультиплексировать символы данных в один или более надлежащих поддиапазонов и выполнять модуляцию OFDM на мультиплексированных символах для генерации символов OFDM.
В одном примере процессор 830 ТХ пилот-сигнала на базовой станции 110x может генерировать пилот-сигналы TDM (например, пилот-сигналы 312-316 TDM) во временной области или в частотной области. Мультиплексор (Mux) 832 может затем принять и мультиплексировать пилот-сигналы TDM от процессора 830 TX пилот-сигналов с символами OFDM от модулятора 820 OFDM, чтобы обеспечить поток выборок к блоку передатчика (TMTR) 834. Блок передатчика 834 может преобразовывать поток выборок в аналоговые сигналы и дополнительно преобразовывать (например, усиливать, фильтровать и/или преобразовывать с повышением частоты) аналоговые сигналы для генерации модулированного сигнала. Базовая станция 110x может затем передать модулированный сигнал от антенны 836 на один или более терминалов 120x в системе 800.
В соответствии с другим аспектом терминал 120x может принять переданные сигналы от базовой станции 110x, а также от одной или более других базовых станций через антенну 852. Один или более принятых сигналов могут быть выданы в блок приемника (RCVR) 854, который может преобразовывать (например, фильтровать, усиливать, преобразовывать с понижением частоты и/или преобразовывать в цифровую форму) каждый принятый сигнал для генерации потока принятых выборок. Блок 880 синхронизации (sync) может получить принятые выборки от блока приемника 854 и выполнить обнаружение, чтобы обнаружить сигналы от одной или более базовых станций и далее определить хронирование каждой обнаруженной базовой станции. Блок 880 синхронизации может также предоставить информацию хронирования демодулятору 860 OFDM и/или контроллеру 890.
Демодулятор OFDM 860 в терминале 120x может выполнять демодуляцию OFDM на принятых выборках, основываясь на информации хронирования от блока 880 синхронизации, чтобы получить принятые символы данных и пилот-сигналов. Дополнительно, демодулятор OFDM 860 может также выполнить детектирование и/или согласованную фильтрацию на полученных символах данных с оценкой канала (например, оценкой частотной характеристики), чтобы получить продетектированные символы данных, которые являются оценками символов данных, посланных базовой станцией 110x. Демодулятор OFDM 860 может затем предоставить продетектированные символы данных процессору 870 принятых (RX) данных, который может обработать (например, выполнить обращенное отображение символов, обращенное перемежение и/или декодирование) продетектированных символов данных и предоставить декодированные данные. Процессор 870 RX и/или контроллер 890 может дополнительно использовать информацию хронирования, предоставленную блоком 880 синхронизации, чтобы восстановить различные типы данных, переданных базовой станцией 110x.
В одном примере обработка демодулятором 860 OFDM и процессором 870 RX, расположенными в терминале 120x, может быть в общем случае комплементарной к обработке модулятором 820 OFDM и процессором 810 TX, расположенными на базовой станции 110x. Далее, контроллеры 840 и 890 могут соответственно управлять работой на базовой станции 110x и терминале 120x. Блоки 842 и 892 памяти могут также быть, соответственно, предоставлены для базовой станции 110x и терминала 120x, чтобы обеспечить хранение для кодов программ и данных, используемых, соответственно, контроллерами 840 и 890.
На фиг.9 представлена блок-схема системы 900, которая координирует генерацию и передачу последовательностей пилот-сигналов (например, пилот-сигналов 312-316 TDM) в системе беспроводной связи (например, системе 100) в соответствии с различными аспектами, описанными здесь. В одном примере система 900 включает в себя базовую станцию или пункт 902 доступа. Как проиллюстрировано, пункт 902 доступа может принимать сигнал(ы) от одного или более терминалов 904 доступа через приемную (Rx) антенну 906 и передавать к одному или более терминалам 904 доступа через передающую (Tx) антенну 908. Дополнительно, пункт 902 доступа может включать в себя приемник 910, который принимает информацию от приемной антенны 906. В одном примере приемник 910 может быть оперативно связан с демодулятором (Demod) 912, который демодулирует полученную информацию. Демодулированные символы могут затем быть проанализированы процессором 914. Процессор 914 может быть соединен с памятью 916, которая может хранить информацию, связанную с идентичностью пункта 902 доступа и/или одним или более секторов (например, сектора 104), обслуживаемых пунктом 902 доступа, последовательности пилот-сигналов, кластеры кодов, назначения терминалов доступа, таблицы поиска, связанные с этим, уникальные последовательности скремблирования и/или другие подходящие типы информации. В одном примере пункт 902 доступа может использовать процессор 914, чтобы выполнить способ 600 и/или другие соответствующие способы. Пункт 902 доступа может также включать в себя модулятор 918, который может мультиплексировать сигнал для передачи передатчиком 920 через передающую антенну 908 на один или более терминалов 904 доступа.
На фиг.10 показана блок-схема системы 1000, которая координирует обнаружение сигнала в системе беспроводной связи в соответствии с различными аспектами, описанными здесь. В одном примере система 1000 включает в себя терминал 1002 доступа. Как проиллюстрировано, терминал 1002 доступа может принимать сигнал(ы) от одного или более пунктов 1004 доступа и передавать сигналы к одному или более пунктам 1004 доступа через антенну 1008. Дополнительно, терминал доступа 1002 может включать в себя приемник 1010, который принимает информацию от антенны 1008. В одном примере приемник 1010 может быть оперативно связан с демодулятором (Demod) 1012, который демодулирует полученную информацию. Демодулированные символы могут затем анализироваться процессором 1010. Процессор 1010 может быть соединен с памятью 1016, которая может хранить данные и/или коды программ, относящиеся к терминалам 1002 доступа. Например, память 1016 может хранить данные и/или коды программ, относящиеся к обнаружению одной или более последовательностей пилот-сигналов, и идентификации и/или синхронизации с пунктом 1004 доступа на основе обнаруженных последовательностей пилот-сигналов. Дополнительно, терминал 1002 доступа может использовать процессор 1010 для выполнения способа 700 и/или других соответствующих способов. Терминал доступа 1002 может также содержать модулятор 1018, который может мультиплексировать сигнал для передачи передатчиком 1020 через антенну 1008 к одному или более пунктам 1004 доступа.
Фиг.11 иллюстрирует устройство 1100, которое обеспечивает генерацию и передачу пилот-сигналов обнаружения в системе беспроводной связи (например, системе 200). Понятно, что устройство 1100 представлено как включающее в себя функциональные блоки, которые могут быть функциональными блоками, представляющими функции, осуществляемые процессором, программным обеспечением, или комбинацией указанных средств (например, программно-аппаратными средствами). Устройство 1100 может быть реализовано во взаимосвязи с пунктом доступа (например, пунктом 210 доступа) и/или группой антенны (например, группой 212 антенн) и может содержать модуль для генерации первого пилот-сигнала обнаружения из первой последовательности 1102 пилот-сигнала временной области. Устройство 1100 может также содержать модуль для генерации второго пилот-сигнала обнаружения из второй последовательности пилот-сигнала временной области и/или идентификатора 1104 сектора и модуль для генерации третьего пилот-сигнала обнаружения из третьей последовательности пилот-сигнала временной области и/или идентификатора 1106 сектора. Далее, устройство 1100 может содержать модуль для передачи сгенерированных пилот-сигналов на терминал доступа (например, терминал 220 доступа) в поле 1108 пилот-сигналов (например, поле 230 пилот-сигналов).
Фиг.12 иллюстрирует устройство 1200, которое обеспечивает обнаружение сигнала в системе беспроводной связи (например, системе 200). Понятно, что устройство 1200 представлено как включающее в себя функциональные блоки, которые могут быть функциональными блоками, представляющими функции, осуществляемые процессором, программным обеспечением, или комбинацией указанных средств (например, программно-аппаратными средствами). Устройство 1200 может быть реализовано во взаимосвязи с терминалом доступа (например, терминалом 220 доступа) и может включать в себя модули 1202, 1204 и 1206 для, соответственно, обнаружения первого, второго и третьего пилот-сигнала обнаружения. Устройство 1200 может также включать в себя модуль для оценивания хронирования системы из первых обнаруженных пилот-сигналов обнаружения 1208, модуль для идентификации пункта доступа (например, пункта 210 доступа и/или группы антенны 212) для связи с использованием обнаруженных пилот-сигналов 1210 обнаружения и модуль для синхронизации с идентифицированным пунктом доступа с использованием обнаруженных пилот-сигналов 1212 обнаружения.
Понятно, что варианты осуществления, описанные здесь, могут быть осуществлены аппаратными средствами, программным обеспечением, программно-аппаратными средствами, промежуточным программным обеспечением, микрокодом или любой комбинацией указанного. Когда системы и/или способы осуществлены программным обеспечением, программно-аппаратными средствами, промежуточным программным обеспечением или микрокодом, программным кодом или сегментами кода, они могут быть сохранены на машиночитаемом носителе, таком как компонент хранения. Сегмент кода может представлять процедуру, функцию, подпрограмму, программу, стандартную программу, подпрограмму, модуль, пакет программ, класс или любую комбинацию инструкций, структур данных или программных операторов. Сегмент кода может быть связан с другим сегментом кода или схемой аппаратных средств, путем передачи и/или приема информации, данных, аргументов, параметров или содержания памяти. Информация, аргументы, параметры, данные и т.д. могут быть переданы, отправлены или переданы с использованием любых подходящих средств, включая совместное использование памяти, передачу сообщений, передачу маркеров, сетевую передачу и т.д.
Для реализации с помощью программного обеспечения способы, описанные здесь, могут быть реализованы модулями (например, процедуры, функции и так далее), которые выполняют описанные функции. Коды программного обеспечения могут быть сохранены в блоках памяти и могут исполняться процессорами. Блок памяти может быть реализован в процессоре или быть внешним по отношению к процессору, и в этом случае он может быть коммуникативно связан с процессором через различные средства, как известно в технике.
То, что было описано выше, включает примеры одного или более вариантов осуществления. Конечно, невозможно описать каждую мыслимую комбинацию компонентов или методов в целях описания вышеупомянутых вариантов осуществления, но специалисту в данной области техники должно быть понятно, что возможно множество других комбинаций и перестановок различных вариантов осуществления. Соответственно, описанные варианты осуществления предназначены, чтобы охватывать все такие изменения, модификации и вариации, которые находятся в пределах сущности и объема формулы изобретения. Кроме того, в том смысле, в котором термин "включает" использован в детальном описании или в формуле изобретения, такой термин должен трактоваться как включительный, подобно термину "содержащий", когда термин "содержащий" интерпретируется как переходное слово в формуле изобретения. Кроме того, термин "или", как он используется в детальном описании или в формуле изобретения, подразумевается как обозначающий "неисключающее или".








Изобретение относится к технике связи и может быть использовано для обнаружения сигнала в системе беспроводной связи. Пилот-сигналы обнаружения могут генерироваться базовой станцией и передаваться в поле пилот-сигналов на один или более терминалов доступа, содействуя обнаружению сигнала на каждом из терминалов доступа. Первый пилот-сигнала обнаружения генерируют на основе части идентификатора объекта передатчика, второй пилот-сигнала обнаружения генерируют на основе всего идентификатора объекта передатчика и осуществляют передачу первого и второго пилот-сигналов обнаружения как мультиплексированных с временным разделением (TDM) пилот-сигналов. Технический результат - получение оценки временных характеристик для системы при минимизации эффектов вариаций помех между базовыми станциями и обеспечение возможности идентификации каждого соответствующего пункта доступа посредством его сгенерированных пилот-сигналов. 10 н. и 31 з.п. ф-лы, 16 ил.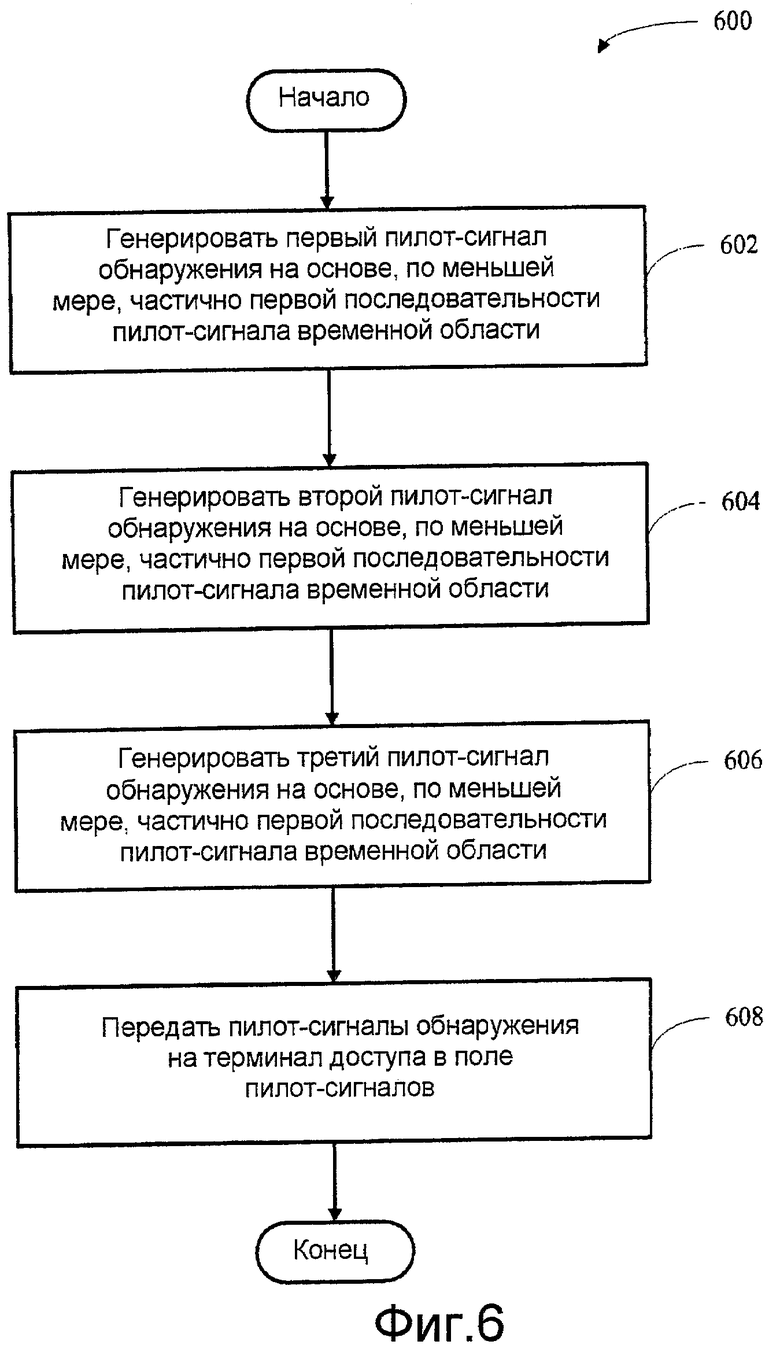
1. Способ беспроводной связи, содержащий
генерацию первого пилот-сигнала обнаружения на основе части идентификатора объекта передатчика;
генерацию второго пилот-сигнала обнаружения на основе всего идентификатора объекта передатчика; и
передачу первого и второго пилот-сигналов обнаружения как мультиплексированных с временным разделением (TDM) пилот-сигналов.
2. Способ по п.1, в котором первый пилот-сигнал обнаружения генерируется на основе последовательности, имеющей низкое отношение пиковой к средней мощности (PAR).
3. Способ по п.1, в котором второй пилот-сигнал обнаружения генерируется на основе псевдошумовой (PN) последовательности.
4. Способ по п.1, в котором первый и второй пилот-сигналы обнаружения имеют одинаковую предопределенную длину.
5. Способ по п.1, в котором генерация первого пилот-сигнала обнаружения включает в себя
генерацию первой последовательности пилот-сигнала на основе части идентификатора объекта передатчика, и
генерацию первого пилот-сигнала обнаружения на основе первой последовательности пилот-сигнала.
6. Способ по п.5, в котором генерация второго пилот-сигнала обнаружения включает в себя
генерацию второй последовательности пилот-сигнала на основе всего идентификатора объекта передатчика, и
генерацию второго пилот-сигнала обнаружения на основе второй последовательности пилот-сигнала.
7. Способ по п.1, дополнительно содержащий
генерацию третьего пилот-сигнала обнаружения, который является общим для всех объектов передатчиков; и
передачу третьего пилот-сигнала обнаружения как отличающегося TDM пилот-сигнала.
8. Способ по п.1, в котором к второму пилот-сигналу обнаружения применяется код скремблирования.
9. Способ по п.1, в котором первый и второй пилот-сигналы обнаружения передаются периодически, в каждом периоде времени с предопределенной длительностью.
10. Устройство беспроводной связи, содержащее
процессор, конфигурированный для генерации первого пилот-сигнала обнаружения на основе части идентификатора объекта передатчика, для генерации второго пилот-сигнала обнаружения на основе всего идентификатора объекта передатчика, и для передачи первого и второго пилот-сигналов обнаружения как мультиплексированных с временным разделением (TDM) пилот-сигналов.
11. Устройство беспроводной связи по п.10, в котором процессор дополнительно конфигурирован для генерации первого пилот-сигнала обнаружения на основе последовательности, имеющей низкое отношение пиковой к средней мощности (PAR).
12. Устройство беспроводной связи по п.10, в котором процессор дополнительно конфигурирован для генерации второго пилот-сигнала обнаружения на основе псевдошумовой (PN) последовательности.
13. Устройство беспроводной связи по п.10, в котором первый и второй пилот-сигналы обнаружения имеют одинаковую предопределенную длину.
14. Устройство беспроводной связи по п.10, в котором процессор дополнительно конфигурирован для генерации первой последовательности пилот-сигнала на основе части идентификатора объекта передатчика и для генерации первого пилот-сигнала обнаружения на основе первой последовательности пилот-сигнала.
15. Устройство беспроводной связи по п.14, в котором процессор дополнительно конфигурирован для генерации второй последовательности пилот-сигнала на основе всего идентификатора объекта передатчика и для генерации второго пилот-сигнала обнаружения на основе второй последовательности пилот-сигнала.
16. Устройство беспроводной связи по п.10, в котором процессор дополнительно конфигурирован для генерации третьего пилот-сигнала обнаружения, который является общим для всех объектов передатчиков, и для передачи третьего пилот-сигнала как отличающегося TDM пилот-сигнала.
17. Устройство беспроводной связи по п.10, в котором процессор дополнительно конфигурирован для генерации второго пилот-сигнала обнаружения на основе кода скремблирования.
18. Устройство беспроводной связи, содержащее
средство для генерации первого пилот-сигнала обнаружения на основе части идентификатора объекта передатчика;
средство для генерации второго пилот-сигнала обнаружения на основе всего идентификатора объекта передатчика; и
средство для передачи первого и второго пилот-сигнала как мультиплексированных с временным разделением (TDM) пилот-сигналов.
19. Устройство по п.18, в котором первый пилот-сигнал обнаружения генерируется на основе последовательности, имеющей низкое отношение пиковой к средней мощности (PAR).
20. Устройство по п.18, в котором второй пилот-сигнал обнаружения генерируется на основе псевдошумовой (PN) последовательности.
21. Машиночитаемый носитель, имеющий сохраненные на нем исполняемые компьютером инструкции, которые, при исполнении компьютером, побуждают компьютер к осуществлению способа, содержащего
генерацию первого пилот-сигнала обнаружения на основе части идентификатора объекта передатчика;
генерацию второго пилот-сигнала обнаружения на основе всего идентификатора объекта передатчика; и
направление передачи первого и второго пилот-сигналов обнаружения как мультиплексированных с временным разделением (TDM) пилот-сигналов.
22. Машиночитаемый носитель по п.21, в котором первый пилот-сигнал обнаружения генерируется на основе последовательности, имеющей низкое отношение пиковой к средней мощности (PAR).
23. Машиночитаемый носитель по п.21, в котором второй пилот-сигнал обнаружения генерируется на основе псевдошумовой (PN) последовательности.
24. Процессор, выполненный с возможностью осуществления беспроводной связи и сконфигурированный для
генерации первого пилот-сигнала обнаружения на основе части идентификатора объекта передатчика;
генерации второго пилот-сигнала обнаружения на основе всего идентификатора объекта передатчика; и
передачи первого и второго пилот-сигналов обнаружения как мультиплексированных с временным разделением (TDM) пилот-сигналов.
25. Процессор по п.24, дополнительно сконфигурированный для генерации первого пилот-сигнала обнаружения на основе последовательности, имеющей низкое отношение пиковой к средней мощности (PAR), и
генерации второго пилот-сигнала обнаружения на основе псевдошумовой (PN) последовательности.
26. Способ беспроводной связи, содержащий
обнаружение первого пилот-сигнала обнаружения, сгенерированного на основе части идентификатора объекта передатчика; и
обнаружение второго пилот-сигнала обнаружения, сгенерированного на основе всего идентификатора объекта передатчика, причем первый и второй пилот-сигналы обнаружения передаются как мультиплексированные с временным разделением (TDM) пилот-сигналы.
27. Способ по п.26, в котором обнаружение первого пилот-сигнала обнаружения включает в себя прием одного или более сигналов;
определение корреляции относительно одного или более сигналов; и определение, содержат ли один или более сигналов первый пилот-сигнал обнаружения, на основе упомянутой корреляции.
28. Способ по п.27, в котором определение корреляции относительно одного или более сигналов включает в себя определение корреляции относительно одного или более сигналов на основе последовательности пилот-сигнала для первого пилот-сигнала обнаружения.
29. Способ по п.26, дополнительно содержащий обнаружение третьего пилот-сигнала обнаружения, который является общим для всех объектов передатчиков.
30. Способ по п.26, дополнительно содержащий идентификацию объекта передатчика на основе идентификатора объекта передатчика, полученного из обнаруженных первого и второго пилот-сигналов обнаружения.
31. Способ по п.26, в котором обнаружение второго пилот-сигнала обнаружения выполняется, только если обнаружен первый пилот-сигнал обнаружения.
32. Способ по п.26, дополнительно содержащий определение хронирования объекта передатчика на основе первого пилот-сигнала обнаружения.
33. Устройство беспроводной связи, содержащее
процессор, конфигурированный для обнаружения первого пилот-сигнала обнаружения, сгенерированного на основе части идентификатора объекта передатчика, и для обнаружения второго пилот-сигнала обнаружения, сгенерированного на основе всего идентификатора объекта передатчика, причем первый и второй пилот-сигналы обнаружения передаются как мультиплексированные с временным разделением (TDM) пилот-сигналы.
34. Устройство беспроводной связи по п.33, в котором процессор конфигурирован для идентификации объекта передатчика на основе идентификатора объекта передатчика, полученного из обнаруженных первого и второго пилот-сигналов обнаружения.
35. Устройство беспроводной связи по п.33, в котором процессор конфигурирован для определения хронирования объекта передатчика на основе первого пилот-сигнала обнаружения.
36. Устройство беспроводной связи, содержащее
средство для обнаружения первого пилот-сигнала обнаружения, сгенерированного на основе части идентификатора объекта передатчика; и
средство для обнаружения второго пилот-сигнала обнаружения, сгенерированного на основе всего идентификатора объекта передатчика, причем первый и второй пилот-сигналы обнаружения передаются как мультиплексированные с временным разделением (TDM) пилот-сигналы.
37. Машиночитаемый носитель, имеющий сохраненные на нем исполняемые компьютером инструкции, которые при исполнении компьютером, побуждают компьютер к осуществлению способа, содержащего
обнаружение первого пилот-сигнала обнаружения, сгенерированного на основе части идентификатора объекта передатчика; и
обнаружение второго пилот-сигнала обнаружения, сгенерированного на основе всего идентификатора объекта передатчика, причем первый и второй пилот-сигналы обнаружения передаются как мультиплексированные с временным разделением (TDM) пилот-сигналы.
38. Машиночитаемый носитель по п.37, в котором инструкции дополнительно побуждают компьютер к осуществлению действий для
идентификации объекта передатчика на основе идентификатора объекта передатчика, полученного из обнаруженных первого и второго пилот-сигналов обнаружения.
39. Машиночитаемый носитель по п.37, в котором инструкции дополнительно побуждают компьютер к осуществлению действий для
определения хронирования объекта передатчика на основе первого пилот-сигнала обнаружения.
40. Процессор, функционирующий для осуществления беспроводной связи и сконфигурированный для
обнаружения первого пилот-сигнала обнаружения, сгенерированного на основе части идентификатора объекта передатчика; и
обнаружения второго пилот-сигнала обнаружения, сгенерированного на основе всего идентификатора объекта передатчика, причем первый и второй пилот-сигналы обнаружения передаются как мультиплексированные с временным разделением (TDM) пилот-сигналы.
41. Процессор по п.40, дополнительно сконфигурированный для идентификации объекта передатчика на основе идентификатора объекта передатчика, полученного из обнаруженных первого и второго пилот-сигналов обнаружения.
| : WO 00/65736, 02.11.2000 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ОРТОГОНАЛЬНОЙ РАЗНЕСЕННОЙ ПЕРЕДАЧИ-ПРИЕМА СИГНАЛА В СОТОВОЙ СИСТЕМЕ РАДИОСВЯЗИ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1998 |
|
RU2145152C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

