Предлагаемая группа изобретений относится к области самолетов и вертолетов, в частности воздушных винтов и систем управления полетом.
Известны различные аэродинамические схемы вертолетов: одновинтовые с рулевым винтом, одновинтовые со струйной системой управления, двухвинтовые продольной схемы, двухвинтовые поперечной схемы, двухвинтовые соосной схемы, двухвинтовые с перекрещивающимися плоскостями роторов, конвертопланы, винтокрылы. Технологический предел скорости вертолетов определяется разницей в скорости движения наступающих и отступающих лопастей несущего винта. У винтокрылых летательных аппаратов с двумя соосными несущими винтами этот недостаток компенсируется вращением роторов в противоположных направлениях, однако необходимость создания одними и теми же винтами вертикальной подъемной силы и горизонтальной тяги является ограничивающим фактором увеличения скорости полета. Для преодоления этих ограничений создавались летательные аппараты с двумя несущими винтами и двумя ("Камов" Ка-22) или одним (Sikorsky X2) толкающими винтами. Источник: журнал "Популярная механика" Август 2008 года, "Вертолет с толкающим винтом". Общим для современных винтокрылых летательных аппаратов с толкающими винтами является принцип управления полетом с помощью автомата перекоса несущих винтов, изменением тяги толкающих винтов и аэродинамических плоскостей хвостового оперения.
Целью предлагаемого изобретения является увеличение маневренности летательного винтокрылого аппарата с толкающими винтами при сохранении высоких скоростных качеств аппаратов такой схемы.
Поставленная цель достигается управлением вектором тяги вращающихся в противоположных направлениях соосных хвостовых движущих винтов за счет размещения их на подвижной части хвостовой балки, шарнирно закрепленной на основной части хвостовой балки винтокрылого летательного аппарата, изменением углов атаки лопастей хвостовых движущих винтов раздельно для каждого винта в широких пределах и регулированием скоростей вращения движущих винтов раздельно для каждого винта.
Предлагаемые движущие винты устроены следующим образом.
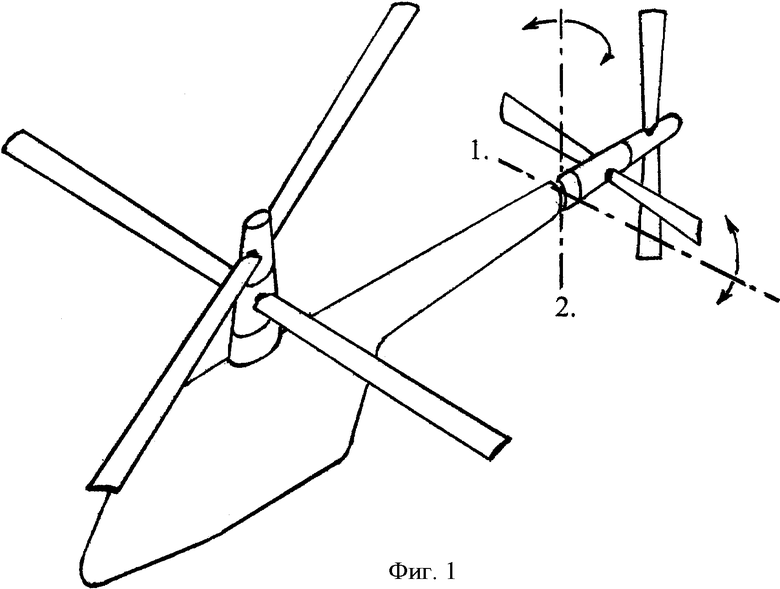
Пара соосных винтов с противоположными направлениями вращения располагаются на подвижной концевой части хвостовой балки, соединенной шарниром с основной частью хвостовой балки летательного аппарата (Фигура 1) таким образом, что подвижная часть с движущими винтами может отклоняться от оси хвостовой балки вверх-вниз вокруг поперечной оси 1 шарнира и вправо-влево относительно вертикальной оси 2 шарнира на углы до 90° от продольной оси летательного аппарата. Таким образом может быть осуществлено эффективное управление летательным аппаратом по курсу и тангажу. Управление скоростью и направлением полета осуществляется путем изменения углов атаки лопастей движущих хвостовых винтов от положительных (обеспечивающих тягу вперед) до отрицательных, что обеспечивает летательному аппарату движение как вперед, так и в обратном направлении. Управление креном осуществляется за счет разницы скоростей вращения движущих винтов, когда винт одного направления вращения вращается со скоростью, отличной от скорости вращения другого, или способом, когда лопасти одного из движущих винтов приводятся в такое положение, что плоскости лопастей образуют угол, приближающийся к 90° к плоскости вращения, создавая вращательный момент и наклоняя весь летательный аппарат относительно его продольной оси в сторону, противоположную направлению вращения винта, осуществляющего кренение.
Вариантом конструкции движущих винтов является конструкция с шарнирным узлом хвостовой балки с единственной осью вращения, которая расположена в срединной плоскости летательного аппарата под углом к продольной оси основной части хвостовой балки и одновременно под углом к оси вращения движущих хвостовых винтов (Фигура 2). При этом варианте пара соосных винтов с противоположными направлениями вращения располагается на подвижной концевой части хвостовой балки, которая может вращаться вокруг оси 3, закрепленной под углом к оси основной части хвостовой балки летательного аппарата таким образом, что вращающаяся на этой оси подвижная часть с движущими винтами может описывать конус с вершиной на шарнирном узле хвостовой балки. В маршевом положении подвижный узел с движущими винтами является продолжением хвостовой балки и тяга винтов направлена вдоль продольной оси летательного аппарата, обеспечивая максимальную крейсерскую скорость. При вращении подвижной части с движущими винтами по часовой или против часовой стрелки вектор тяги движущих винтов отклоняется вправо или влево и по вертикали, обеспечивая необходимые для маневрирования крены и тангажи. Раздельное управление скоростями вращения движущих винтов и управление в пределах до 180° углами атаки лопастей этих винтов обеспечивают летательному аппарату возможность двигаться как вперед, так и в обратном направлении и осуществлять кренение при маневрировании способами, описанными выше.
Технически разнонаправленное вращение движущих винтов с разными угловыми скоростями для каждого из них может быть реализовано с помощью тяговых электродвигателей, расположенных в подвижной части хвостовой балки и вращающих движущие винты. Управление углами атаки лопастей каждого из винтов также осуществляется с помощью отдельных электродвигателей через редукторы.
Предлагаемая конструкция движущих винтов для винтокрылого летательного аппарата позволит обеспечить следующие технические преимущества.
1. Перенос функций управления полетом с несущих винтов на движущие позволяет упростить конструкцию несущих винтов за счет упразднения автомата перекоса лопастей несущих винтов и повысить тем самым надежность всего летательного аппарата.
2. Перенос функции обеспечения горизонтальной тяги с несущих винтов на движущие увеличивает КПД несущих винтов и скорость полета винтокрылого летательного аппарата.
3. Маневренность винтокрылого летательного аппарата за счет изменения вектора тяги движущих винтов в различных направлениях и раздельного изменения углов атаки лопастей движущих винтов в широких пределах значительно увеличивается в динамике и при висении в воздухе, что может быть особенно ценно в боевых условиях.
4. Соосная схема размещения движущих винтов позволяет компенсировать отрицательные вращательные и гироскопические моменты при маневрах в разные стороны, присущие схемам с одним хвостовым винтом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2453472C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| Скоростной двухвинтовой вертолет соосной схемы | 2016 |
|
RU2658467C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2385268C1 |
Группа изобретений относится к области самолетов и вертолетов, в частности к воздушным винтам и системам управления полетом. Винтокрылый летательный аппарат по первому варианту имеет два несущих винта с противоположным направлением вращения лопастей. Пара движущих соосных вращающихся в противоположных направлениях винтов с независимыми друг от друга изменяемыми углами атаки лопастей от положительного до отрицательного и независимо изменяемыми скоростями вращения каждого из движущих винтов размещены на подвижной части хвостовой балки, соединенной с основной частью хвостовой балки шарниром с двумя осями вращения, позволяющим поворачивать толкающие винты вверх-вниз и вправо-влево относительно самой хвостовой балки. Винтокрылый летательный аппарат по второму варианту имеет два несущих винта с противоположным направлением вращения лопастей. Пара движущих соосных вращающихся в противоположных направлениях винтов с независимыми друг от друга изменяемыми углами атаки лопастей от положительного до отрицательного и независимо изменяемыми скоростями вращения каждого из движущих винтов размещены на подвижной части хвостовой балки, соединенной с основной частью хвостовой балки шарниром. Единственная ось шарнира закреплена под углом к основной части хвостовой балки летательного аппарата и под углом к подвижной части с движущими винтами таким образом, что ось вращения движущих винтов может описывать фигуру в виде конуса с вершиной, приходящейся на шарнирный узел, и в одном из положений параллельна продольной оси летательного аппарата. Достигается улучшение маневренности винтокрылого летательного аппарата. 2 н.п. ф-лы, 2 ил.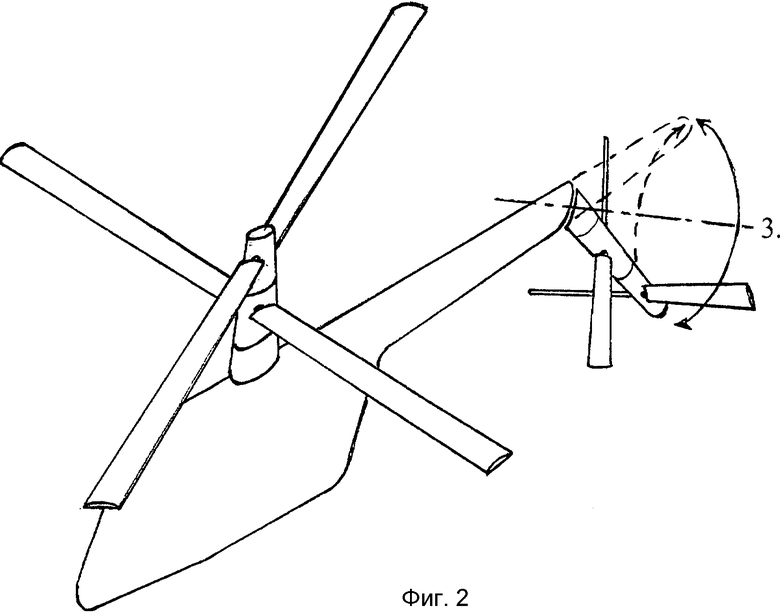
1. Винтокрылый летательный аппарат, имеющий два несущих винта с противоположным направлением вращения лопастей, отличающийся тем, что пара движущих соосных вращающихся в противоположных направлениях винтов с независимыми друг от друга изменяемыми углами атаки лопастей от положительного до отрицательного и независимо изменяемыми скоростями вращения каждого из движущих винтов размещена на подвижной части хвостовой балки, соединенной с основной частью хвостовой балки шарниром с двумя осями вращения, позволяющим поворачивать толкающие винты вверх-вниз и вправо-влево относительно самой хвостовой балки.
2. Винтокрылый летательный аппарат, имеющий два несущих винта с противоположным направлением вращения лопастей, отличающийся тем, что пара движущих соосных вращающихся в противоположных направлениях винтов с независимыми друг от друга изменяемыми углами атаки лопастей от положительного до отрицательного и независимо изменяемыми скоростями вращения каждого из движущих винтов размещена на подвижной части хвостовой балки, соединенной с основной частью хвостовой балки шарниром, единственная ось которого закреплена под углом к основной части хвостовой балки летательного аппарата и под углом к подвижной части с движущими винтами таким образом, что ось вращения движущих винтов может описывать фигуру в виде конуса с вершиной, приходящейся на шарнирный узел, а также может быть параллельна продольной оси летательного аппарата.
| JP 2001191996 A, 17.07.2001 | |||
| КАСКАДНО-СТАБИЛИЗАТОРНЫЙ ВЕРТОЛЁТ | 2000 |
|
RU2266237C2 |
| ГИДРОКОНВЕРТОЭКРАНОПЛАН | 2004 |
|
RU2264951C1 |
| US 2005061909 A1, 24.03.2005. | |||

