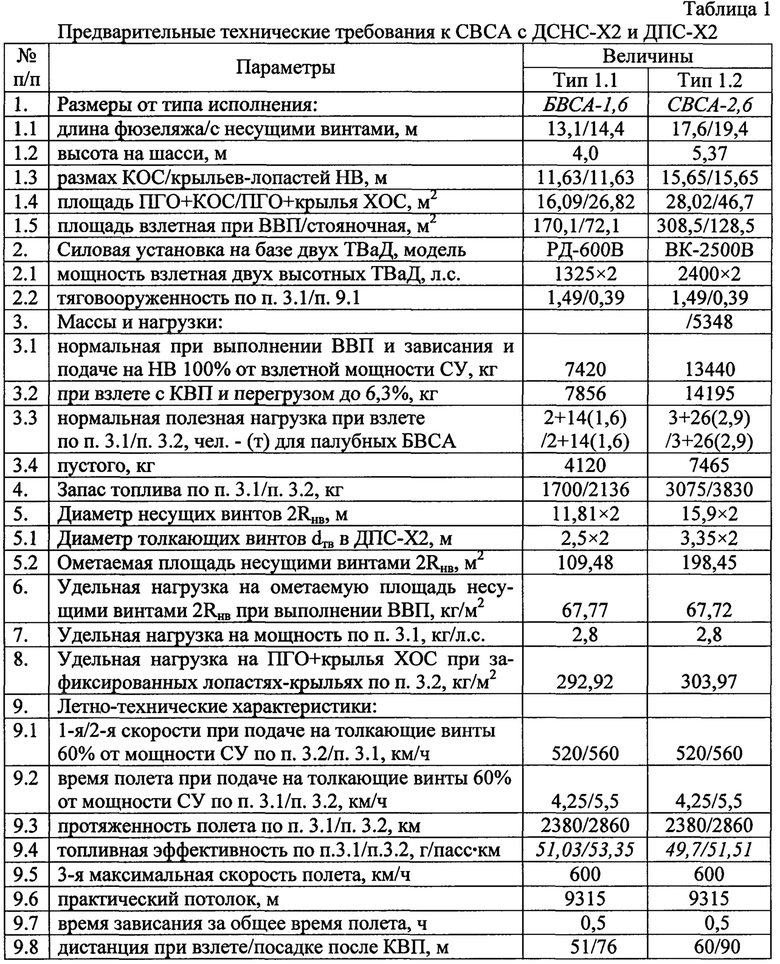
Изобретение относится к области авиационной техники и может быть использовано в конструкции скоростных вертолетов-самолетов-амфибий с двухвинтовыми несущей и движительной раздельными системами, имеющими с противоположным вращением винты соответственно соосные однолопастные и толкающие флюгерно-реверсивные, смонтированные соответственно над центром масс на верхней части фюзеляжа-лодки и в гондолах на законцовках V-образного оперения и обеспечивающие вертикальный или короткий взлет/посадку (ВВП или КВП) и горизонтальный скоростной полет при зафиксированных лопастях-крыльях, образующих в схеме «утка» с крылом обратной стреловидностью Х-образную стреловидность крыльев.
Известен полностью электрический беспилотный конвертоплан (БКП) компании ''Новые технологии'' (РФ) модели ''Эра-100'', имеющий на концах тандемных крыльев обратной и прямой стреловидности электромоторы с двухлопастными винтами в поворотных мотогондолах, при повороте которых он преобразовывается с самолета в вертолет четырехвинтовой несущей схемы, содержит в фюзеляже из углепластика систему управления, аккумуляторные батареи и полозковое шасси.
Признаки, совпадающие - наличие крыльев с Х-образной стреловидностью, имеющих на законцовках электромоторы мощностью по 2,7 кВт с винтами. Система управляет передней и задней парой поворотных электромоторов соответственно с тянущими винтами на низко расположенном крыле обратной стреловидности и с толкающими винтами на высоко расположенном крыле прямой стреловидности. Электрический БКП ''Эра-100'' с взлетным весом 24 кг сочетает в себе преимущества вертолета и самолета, может подниматься на высоту до 2 км, наличие тандемных крыльев позволяет при крейсерском полете в самолетной конфигурации находится без подзарядки батарей в воздухе до 1 часа и действовать в радиусе до 60 км.
Причины, препятствующие поставленной задаче: первая - это то, что четырехвинтовой БКП ''Эра-100'' имеет ряд недостатков, препятствующих дальнейшему повышению полезной нагрузки, как-то: первый - это то, что данный БКП, содержащий на концах тандемных крыльев с размахом 1 м четыре поворотных электромотора с винтами диаметром 0,5 м, имеет плохую управляемость по курсу на самолетных режимах полета, сложную схему управления электромоторами при независимом их повороте и вращении двух толкающих и двух тянущих винтов на переходных и вертолетных режимах полета. Второй - это то, что при висении поток от двух передних тянущих винтов, обдувая соответственно консоли первого крыла от их законцовок, создают из-за отсутствия внешних закрылок переднего крыла значительную потерю каждого винта (≈20%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги передних винтов и создавать задними двумя толкающими винтами ситуацию неуправляемого пикирования, что снижает стабильность управления и безопасность. Третий - это то, что равновеликие винты с четырьмя электромоторами одинаковой мощности предопределяют равноудаленное размещение пары передних и пары задних винтов от центра масс, что, уменьшая длину фюзеляжа до 1,3 м, приводит из-за отсутствия киля к ухудшению путевой устойчивости на переходных и самолетных крейсерских режимах полета.
Известен беспилотный винтокрыл модели Quadcruiser европейской фирмы Airbus Group, имеющий четыре подъемных и один маршевый вертикально и горизонтально ориентированных двигателя соответственно с несущими и задним винтами, используемыми на вертолетных и самолетных режимах полета и размещенными на концах тандемных крыльев и фюзеляжа за вторым крылом в мотогондолах.
Признаки, совпадающие - наличие высокорасположенных тандемных крыльев, снабженных четырьмя мотогондолами, каждая из которых имеет переднюю продолговатую гондолу, вынесенную за соответствующие кромки крыльев с вертикально ориентированными электромоторами и несущими винтами. Толкающий винт, расположенный соответственно сзади фюзеляжа за вертикальным оперением, обеспечивает маршевую тягу для горизонтального крейсерского полета со скоростью 90 км/ч.
Причины, препятствующие поставленной задаче: первая - это то, что ''Quad-cruiser'' четырехвинтовой несущей схемы и с задним толкающим винтом постоянного шага на конце фюзеляжа, используемым только на самолетных режимах полета, имеет сложную схему управления электромоторами при независимом вращении четырех несущих винтов на вертолетных режимах полета, малую полезную нагрузку и весовую отдачу. Вторая - это то, что расположенные на крыльевых мотогондолах тандемом несущие винты одинакового диаметра имеют радиусы, не превышающие длину продолговатых гондол на крыле, что ограничивает взлетный его вес. Кроме того, это также усложняет конструкцию крыла с надкрыльными мотогондолами и, как следствие, увеличивает массу его планера. Третья - это то, что аэродинамическая его схема, у которой основную подъемную силу, необходимую для крейсерского полета, создают тандемные крылья, являясь несущими аэродинамическими поверхностями, а дополнительную подъемную силу - четыре несущих винта, но их составляющая в общей аэродинамической подъемной силе с крыльями ограничена. Поэтому возможность увеличения весовой отдачи при повышении скорости, взлетного веса и времени полета боле 50 минут, но и стояночных размеров планера весьма ограничено.
Наиболее близким к предлагаемому изобретению является скоростной вертолет ''Raider S-97'' компании Sikorsky (США), выполненный по двухвинтовой соосной схеме, имеет двигатель силовой установки (СУ), передающий крутящий момент через главный редуктор и систему валов трансмиссии на несущие и задний винты, смонтированные соответственно над центром масс и на конце хвостовой балки за хвостовым оперением.
Признаки, совпадающие - наличие двухкилевого оперения, турбовального двигателя модели GE-YT706 мощностью 2600 л.с., главного редуктора и валов трансмиссии, передающих мощность трехлопастным соосным несущим винтам диаметром 10,5 м и шестилопастному толкающему винту диаметром 2,13 м, обеспечивающими как выполнение ВВП или зависания, так и его горизонтальный скоростной полет. Вращение соосных винтов - синхронизирующее и противоположно направленное. Взлетная тяговооруженность СУ, позволяющая при непродолжительном времени висения, достигать полезной нагрузки 1000 кг при взлетном его весе 5217 кг. Скоростной вертолет ''Raider S-97'', имея крейсерскую скорость полета до 440 км/ч, радиус действия до 600 км и динамический потолок 4570 м, может применяться для транспортировки 6 человек с обеспечением топливной эффективности не менее, чем 87,93 г/пасс⋅км.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет двухвинтовой соосной схемы и с задним винтом, используемым только на крейсерских режимах полета. Это увеличивает паразитную массу при выполнении ВВП и уменьшает весовую отдачу и радиус действия. Вторая - это то, что при длине фюзеляжа 11,752 м и диаметре несущих винтов 10,35 м предопределяет взлетную/стояночную площадь 121,63/121,63 м2 и соответствующую при этом удельную взлетную/стояночную возможности по полезной нагрузке 8,2216/8,2216 кг/м2 при ПН=1,0 тонна. Третья - это то, что при висении соосное расположение несущих винтов изменяемого шага и с управлением циклического шага нижнего из них значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования. Четвертая - это то, что соосное расположение винтов с автоматом перекоса лопастей нижнего из них весьма увеличивает массу узлов управления, главного редуктора и его высоту (обеспечивая разнос между лопастями нижнего и верхнего винтов 8,5% от их диаметра), что ограничивает возможности базирования. Пятая - это то, что в вертолете двухвинтовой соосной схемы с полужестким креплением лопастей имеют место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов, которое в отдельных случаях может приводить и к их перехлесту. Все это ограничивает возможность улучшения весовой отдачи, повышения скорости и дальности полета, но и предопределяет высокий удельный расход топлива.
Предлагаемым изобретением решается задача в указанном выше известном скоростном вертолете ''Raider S-97'' увеличения полезной нагрузки и весовой отдачи, повышения скорости и дальности полета, уменьшения вибраций и исключения возникновение резонанса при использовании останавливаемых и не убираемых в полете винтов-крыльев, упрощения продольно-поперечной управляемости как при висении, так и скоростном горизонтальном полете, но и при переходных маневрах, а также повышения показателей топливной эффективности и уровня безопасности полетов.
Отличительными признаками предлагаемого изобретения от указанного выше известного многоцелевого многовинтового вертолета-самолета, наиболее близкого к нему, являются наличие того, что он снабжен упомянутой двухвинтовой соосной несущей системой (ДСНС), включающей однолопастные несущие винты (НВ) с профилированными противовесами, обеспечивающие создание вертикальной тяги только при вертикальном или коротком взлете/посадке (ВВП или КВП), и двухвинтовой пропульсивной системой (ДПС), имеющей на концах гондол толкающие винты, смонтированные на законцовках V-образного оперения для создания маршевой тяги при скоростном горизонтальном полете и зафиксированных двух лопастях-крыльях верхнего и нижнего НВ, размещенных над двигательным отсеком фюзеляжа, снабженным надфюзеляжным воздухозаборником, смонтированным спереди центроплана высокорасположенного крыла обратной стреловидности (КОС), имеющего как отрицательный угол ϕ=-5° поперечного V при отрицательном угле χ=-13° стреловидности, так и обратное сужение с закрылками и внешними флапперонами, уменьшающими при максимальном их отклонении во время выполнения ВВП и зависания потери в вертикальной тяги ДСНС-Х2, и выполнен по аэродинамической схеме «утка» с КОС и возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета с ДСНС-Х2 и ДПС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДПС-Х2 соответственно с однолопастными НВ, работающими на режимах близких к их авторотации или при зафиксированных лопастях-крыльях НВ и синхронно втянутых телескопических их противовесов в обтекатели втулок соответствующих НВ, лопасти которых закреплены под положительным углом χ=+13° стреловидности и вынесены от плоскости симметрии наружу в противоположные стороны, увеличивая как площадь и несущую способность ПГО в схеме «утка» с системой крыльев с X-образной стреловидностью (ХОС), включающей КОС большого удлинения и разноуровневые широкохордовые лопасти-крылья НВ, размещенные над и позади консолей КОС, но и обратно, при этом нижняя часть фюзеляжа для повышения мореходности и обеспечения плавучести выполнена в виде герметизированной лодки, имеющей днище килеватой формы и основной силовой элемент в виде коробчатой балки с внешним ее контуром в виде граненной треугольной формы боковых обтекателей при виде спереди, изготовленной, образуя при виде сверху ромбовидную с округленными вершинами конфигурацию фюзеляжа-лодки, из композиционных материалов и снабженной центральным основным топливным баком и грузовым отсеком для основных узлов и агрегатов четырехопорного колесного шасси, две одноколесные опоры из которых убираются в ниши центроплана переднего горизонтального оперения (ПГО), а две основные двухколесные стойки - в задние отсеки боковых обтекателей фюзеляжа-лодки, причем низкорасположенное ПГО, выполненное, повышая продольно-поперечную остойчивость на воде, полностью герметизированным при положительном угле ψ=+5° поперечного V, снабжено по всему его размаху закрылками, синхронно работающими с механизацией КОС, снабженного внешними отклоняемыми вниз концевыми частями, уменьшающими стояночную площадь при зафиксированных лопастях-крыльях НВ вдоль оси симметрии и установленных назад по полету над кормовой частью хвостовой балки, при этом в ДПС-Х2 каждый флюгерно-реверсивный толкающий винт, имеющий как жесткое крепление лопастей, так и возможность изменения общего его шага и установки его лопастей во флюгерное положение после его остановки и фиксации для осуществления аварийного режима посадки с авторотирующими НВ, но и возможность подключения к вспомогательной силовой установки (ВСУ) для создания прямой и обратной тяги при выполнении зависания для соответствующего поступательного полета вдоль продольной его оси, причем в полностью симметричной и синхронно-сбалансированной ДСНС-Х2 однолопастные НВ, создающие воздушные потоки, которые, снижая шум и вибрации, но и уменьшая аэродинамическую интерференцию, не взаимодействуют с толкающими винтами в ДПС-Х2 и выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между винтами в разнесенной паре по высоте НВ, например, при виде сверху верхний и нижний НВ вращаются соответственно по часовой и против часовой стрелки так, что соответствующие наступающие их лопасти проходили над левым и правым бортами фюзеляжа от носовой к кормовой его части и, как следствие, обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечного и путевого управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком хвостовой балки, что исключает резонансные ее колебания совместно с консолями V-образного оперения, при этом система трансмиссии обеспечивает передачу мощности от двух, например, турбовальных двигателей (ТВаД), левый и правый из которых имеет задний вывод вала для отбора взлетной мощности и смонтирован перед центром масс в передней части моторного отсека и связан посредством муфты сцепления с соответствующим входным валом, передающим крутящий момент от каждого ТВаД на главный многоуровневый редуктор, имеющий несущий и маршевый выходные потоки, связанные через муфты сцепления соответственно с соосными вертикальными выходными валами для НВ и продольным выходным задним валом с кормовым промежуточным V-образным при виде спереди редуктором с соответствующими валами, проложенными в носке консолей V-образного оперения для левого и правого толкающих винтов, причем при выполнении ВВП и зависания плавное перераспределение мощности СУ от двух ТВаД обеспечивается главным редуктором только на однолопастные НВ ДСНС-Х2 в объеме 100% от располагаемой взлетной их мощности, используемой на вертолетных режимах полета при удельной нагрузке на мощность СУ, равной ρN=2,8 кг/л.с., а на самолетных режимах полета при зафиксированных соответствующим образом лопастях-крыльях НВ системой трансмиссии перераспределяется 60% от взлетной мощности СУ только на толкающие винты ДПС-Х2, но и обратно.
Кроме того, упомянутые однолопастные НВ со ступенчатым профилем концевой части на одной третьей радиуса каждой с обратным сужением лопасти, имеющей концевую хорду лопасти в 2,0 раза больше ее корневой хорды и клиновидный профиль с углом α=10° и непрерывной нижней поверхностью, выполнен с верхним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, имея вогнутые во внутрь задние кромки лопасти, создают в точке максимальной ее хорды (bmaxHB), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxHB и 2/3 от толщины сmaxHB, так и заостренную законцовку лопасти, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем упомянутые телескопические противовесы НВ имеют радиус (rтп) во втянутом и выдвинутом положении равновеликий радиусу обтекателя втулки НВ, имеющего диаметрально размещенные срезы в виде круговых сегментов, хорды которых равновелики корневым хордам НВ и противовеса, и 30% от радиуса НВ соответственно, при этом каждый противовес, имеющий корневую и концевую хорды соответственно равновеликую и в 1,2 раза меньше корневой хорды НВ, выполнен с концевой частью в виде ответного сегмента окружности с диаметром равновеликим обтекателю втулки НВ, сопрягаемого при его втягивании со срезом кругового сегмента втулки, образуя удобообтекаемую ее округлую в плане форму, причем при выполнении КВП и винтокрылого горизонтального полета консоли КОС, имеющие валовые закрылки с корневыми хордами в  больше концевых хорд, которые при соответствующем их отклонении преобразуют прямые консоли КОС в консоли с обратным сужением, создающим повышение несущей их способности на винтокрылых режимах полета при обдуве их консолей в зоне максимальных индуктивных скоростей воздушного потока от однолопастных НВ, работающих совместно с маршевой тягой ДПС-Х2, продольная ось толкающих винтов которых размещена по продольной линии, проходящей при виде сбоку выше центра масс и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом НВ снабжены системой обтекателей, имеющей как обтекатели втулок, каждый из которых имеет верхний и нижний выпуклые профили, имеющие эллиптическую конфигурацию, так и обтекатель колонки соосных валов, размещенный между соответствующими обтекателями втулок и уменьшающий общее сопротивление и разнос между лопастью нижнего и верхнего НВ не менее 13% от их радиуса, причем обтекатель, колонки валов имеющий при виде сверху каплевидную форму и систему предотвращения неуправляемого вращения обтекателя вала вокруг оси вращения, смонтирован так, что имеет верхний и нижний щелевые зазоры, выполненные зеркально эллиптическим поверхностям соответствующих обтекателей втулок НВ, при этом обтекатель колонки валов, облегчающий обтекание, уменьшающий разделение потока и сопротивление, снабжен при виде сбоку горизонтальными аэродинамическими равновеликими гребнями, параллельно смонтированными по три с каждой задней боковой его вертикальной поверхности так, что каждый центральный, установленный по ее середине и ближе к задней его кромке, имеющей обратную стреловидность, а верхний и нижний аэродинамические гребни в свою очередь установлены дальше от нее и при этом равноудалены от центрального, причем в системе крыльев ХОС лопасти-крылья НВ и КОС имеют равновеликие площади, а площадь КОС совместно с ПГО составляет 60% от общей площади ПГО с крыльями ХОС в самолетной полетной конфигурации.
больше концевых хорд, которые при соответствующем их отклонении преобразуют прямые консоли КОС в консоли с обратным сужением, создающим повышение несущей их способности на винтокрылых режимах полета при обдуве их консолей в зоне максимальных индуктивных скоростей воздушного потока от однолопастных НВ, работающих совместно с маршевой тягой ДПС-Х2, продольная ось толкающих винтов которых размещена по продольной линии, проходящей при виде сбоку выше центра масс и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом НВ снабжены системой обтекателей, имеющей как обтекатели втулок, каждый из которых имеет верхний и нижний выпуклые профили, имеющие эллиптическую конфигурацию, так и обтекатель колонки соосных валов, размещенный между соответствующими обтекателями втулок и уменьшающий общее сопротивление и разнос между лопастью нижнего и верхнего НВ не менее 13% от их радиуса, причем обтекатель, колонки валов имеющий при виде сверху каплевидную форму и систему предотвращения неуправляемого вращения обтекателя вала вокруг оси вращения, смонтирован так, что имеет верхний и нижний щелевые зазоры, выполненные зеркально эллиптическим поверхностям соответствующих обтекателей втулок НВ, при этом обтекатель колонки валов, облегчающий обтекание, уменьшающий разделение потока и сопротивление, снабжен при виде сбоку горизонтальными аэродинамическими равновеликими гребнями, параллельно смонтированными по три с каждой задней боковой его вертикальной поверхности так, что каждый центральный, установленный по ее середине и ближе к задней его кромке, имеющей обратную стреловидность, а верхний и нижний аэродинамические гребни в свою очередь установлены дальше от нее и при этом равноудалены от центрального, причем в системе крыльев ХОС лопасти-крылья НВ и КОС имеют равновеликие площади, а площадь КОС совместно с ПГО составляет 60% от общей площади ПГО с крыльями ХОС в самолетной полетной конфигурации.
Кроме того, упомянутые клиновидные профили лопастей НВ и непрерывной верхней их поверхностью выполнены с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой образуют упомянутый равнобедренный треугольник в плане, выполняющий на упомянутых соосных верхнем и нижнем НВ роль рулевых поверхностей - элевонов, снабженных сервоприводом и возможностью при выполнении ВВП и зависания на вертолетных режимах полета их синхронного отклонения в вертикальной плоскости таким образом, что как при дифференциальном их отклонении вниз/вверх и вверх/вниз и прохождении при этом лопастей НВ с противоположных правой/левой боковых сторон фюзеляжа, изменяют балансировку по крену соответственно влево и вправо, так и синфазном их отклонении вниз/вверх при прохождении лопастей НВ над хвостовой балкой, изменяют балансировку по тангажу соответственно пикирующий и кабрирующий моменты.
Благодаря наличию этих признаков, позволяющих освоить скоростной вертолет-самолет-амфибию (СВСА), снабженную упомянутой двухвинтовой соосной несущей системой (ДСНС), включающей однолопастные несущие винты (НВ) с профилированными противовесами, обеспечивающие создание вертикальной тяги только при вертикальном или коротком взлете/посадке (ВВП или КВП), и двухвинтовой пропульсивной системой (ДПС), имеющей на концах гондол толкающие винты, смонтированные на законцовках V-образного оперения для создания маршевой тяги при скоростном горизонтальном полете и зафиксированных двух лопастях-крыльях верхнего и нижнего НВ, размещенных над двигательным отсеком фюзеляжа, снабженным надфюзеляжным воздухозаборником, смонтированным спереди центроплана высокорасположенного крыла обратной стреловидности (КОС), имеющего как отрицательный угол ϕ=-5° поперечного V при отрицательном угле χ=-13° стреловидности, так и обратное сужение с закрылками и внешними флапперонами, уменьшающими при максимальном их отклонении во время выполнения ВВП и зависания потери в вертикальной тяги ДСНС-Х2, и выполнен по аэродинамической схеме «утка» с КОС и возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета с ДСНС-Х2 и ДПС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДПС-Х2 соответственно с однолопастными НВ, работающими на режимах близких к их авторотации или при зафиксированных лопастях-крыльях НВ и синхронно втянутых телескопических их противовесов в обтекатели втулок соответствующих НВ, лопасти которых закреплены под положительным углом χ=+13° стреловидности и вынесены от плоскости симметрии наружу в противоположные стороны, увеличивая как площадь и несущую способность ПГО в схеме «утка» с системой крыльев с X-образной стреловидностью (ХОС), включающей КОС большого удлинения и разноуровневые широкохордовые лопасти-крылья НВ, размещенные над и позади консолей КОС, но и обратно, при этом нижняя часть фюзеляжа для повышения мореходности и обеспечения плавучести выполнена в виде герметизированной лодки, имеющей днище килеватой формы и основной силовой элемент в виде коробчатой балки с внешним ее контуром в виде граненной треугольной формы боковых обтекателей при виде спереди, изготовленной, образуя при виде сверху ромбовидную с округленными вершинами конфигурацию фюзеляжа-лодки, из композиционных материалов и снабженной центральным основным топливным баком и грузовым отсеком для основных узлов и агрегатов четырехопорного колесного шасси, две одноколесные опоры из которых убираются в ниши центроплана переднего горизонтального оперения (ПГО), а две основные двухколесные стойки - в задние отсеки боковых обтекателей фюзеляжа-лодки, причем низкорасположенное ПГО, выполненное, повышая продольно-поперечную остойчивость на воде, полностью герметизированным при положительном угле ψ=+5° поперечного V, снабжено по всему его размаху закрылками, синхронно работающими с механизацией КОС, снабженного внешними отклоняемыми вниз концевыми частями, уменьшающими стояночную площадь при зафиксированных лопастях-крыльях НВ вдоль оси симметрии и установленных назад по полету над кормовой частью хвостовой балки, при этом в ДПС-Х2 каждый флюгерно-реверсивный толкающий винт, имеющий как жесткое крепление лопастей, так и возможность изменения общего его шага и установки его лопастей во флюгерное положение после его остановки и фиксации для осуществления аварийного режима посадки с авторотирующими НВ, но и возможность подключения к вспомогательной силовой установки (ВСУ) для создания прямой и обратной тяги при выполнении зависания для соответствующего поступательного полета вдоль продольной его оси, причем в полностью симметричной и синхронно-сбалансированной ДСНС-Х2 однолопастные НВ, создающие воздушные потоки, которые, снижая шум и вибрации, но и уменьшая аэродинамическую интерференцию, не взаимодействуют с толкающими винтами в ДПС-Х2 и выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между винтами в разнесенной паре по высоте НВ, например, при виде сверху верхний и нижний НВ вращаются соответственно по часовой и против часовой стрелки так, что соответствующие наступающие их лопасти проходили над левым и правым бортами фюзеляжа от носовой к кормовой его части и, как следствие, обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечного и путевого управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком хвостовой балки, что исключает резонансные ее колебания совместно с консолями V-образного оперения, при этом система трансмиссии обеспечивает передачу мощности от двух, например, турбовальных двигателей (ТВаД), левый и правый из которых имеет задний вывод вала для отбора взлетной мощности и смонтирован перед центром масс в передней части моторного отсека и связан посредством муфты сцепления с соответствующим входным валом, передающим крутящий момент от каждого ТВаД на главный многоуровневый редуктор, имеющий несущий и маршевый выходные потоки, связанные через муфты сцепления соответственно с соосными вертикальными выходными валами для НВ и продольным выходным задним валом с кормовым промежуточным V-образным при виде спереди редуктором с соответствующими валами, проложенными в носке консолей V-образного оперения для левого и правого толкающих винтов, причем при выполнении ВВП и зависания плавное перераспределение мощности СУ от двух ТВаД обеспечивается главным редуктором только на однолопастные НВ ДСНС-Х2 в объеме 100% от располагаемой взлетной их мощности, используемой на вертолетных режимах полета при удельной нагрузке на мощность СУ, равной ρN=2,8 кг/л.с., а на самолетных режимах полета при зафиксированных соответствующим образом лопастях-крыльях НВ системой трансмиссии перераспределяется 60% от взлетной мощности СУ только на толкающие винты ДПС-Х2, но и обратно. Все это позволит при переходных маневрах СВСА повысить продольно-поперечную управляемость, а размещение СУ вблизи центра масс обеспечит упрощение системы трансмиссии и позволит использовать ТВаД меньших габаритов в их поперечнике, что уменьшит мидель фюзеляжа и его аэродинамическое сопротивление. Применение однолопастных НВ позволит достичь более высокую аэродинамическую эффективность, несмотря на вредное сопротивление профилированных балансировочных противовесов. Для предотвращения нежелательных вибраций однолопастные НВ работают с большой окружной скоростью. Поэтому основной режим работы таких НВ - это ВВП и зависание. В случае появления косого обдува тяга НВ изменяется циклически. Поэтому жесткое крепление лопасти улучшает управляемость, особенно однолопастных НВ. В синхронизированной ДСНС-Х2 моменты Мкрен и Мпрод от соосных однолопастных НВ при передаче на фюзеляж через главный редуктор взаимно уничтожаются. Поэтому коэффициент аэродинамической выгодности однолопастных НВ в ДСНС-Х2 будет выше, имея равновеликий их радиус с НВ как у соосного (Ка-27) вертолета с многолопастными НВ, обеспечит увеличение взлетного веса на 15%. Что позволит повысить весовую отдачу и улучшить на 66,67% топливную эффективность за счет того, что при выполнении ВВП и зависания работают два ТВаД, а при выполнении скоростного крейсерского полета - 60% от двух ТВаД и, особенно, в сравнении с палубным двух-двигательным вертолетом Ка-27, расходующими 734 кг/ч топлива. Более того, все это позволит также в сравнении с традиционным самолетом монопланной схемы повысить маневренность на малых скоростях полета и при переходных маневрах, но и снизить скорость сваливания за сет увеличения в 1,23 раза коэффициент поднятия схемы «утка» с крыльями ХОС, создающей совместно с ПГО преимущество в производстве подъемной силы при выполнении КВП на взлетно-посадочных на скоростных режимах горизонтального полета и, особенно, палубных противолодочных СВСА, но и опционально-управляемых беспилотных вертолетов-самолетов-амфибий (БВСА), используемых на удалении 1190 км от авианесущего корабля (АНК) совместно с СВСА.
Предлагаемое изобретение преобразуемого СВСА, выполненного по концепции ДСНС-Х2 с ДПС-Х2 и крыльями-лопастями однолопастных НВ, зафиксированных над и позади консолей КОС, но и вынесены наружу от оси симметрии, образуя схему «утка» с крыльями ХОС и V-образным оперением, представлено на общих видах сбоку и сверху соответственно а) и б) на фиг. 1 с вариантами его использования:
а) в полетной конфигурации вертолета с ДСНС-Х2, имеющей однолопастные соосные НВ с профилированными телескопическими противовесами, лопасти которых, проходя над носовой и кормовой частями фюзеляжа, свободно вращаются в противоположные стороны над консолями высокорасположенного КОС;
б) в полетной конфигурации турбовинтового самолета с системой крыльев ХОС, создающей подъемную силу совместно с ПГО, КОС и зафиксированными лопастями-крыльями НВ при втянутых телескопических их противовесов, маршевой тягой, обеспечиваемой двумя толкающими винтами с расположением левой и правой консолей КОС в полетной конфигурации без опускания вниз концевых частей 6 КОС 3.
Преобразуемый СВСА, выполненный по аэродинамической схеме «утка» с системой крыльев ХОС, представлен на фиг. 1 и содержит фюзеляж-лодку 1, имеющей днище килеватой формы и хвостовую балку 2. Высокорасположенное КОС 3 с закрылками 4 и флапперонами 5 имеет внешние секции 6, которые выполнены складывающимися вниз во время стоянки. Низкорасположенное ПГО 7 снабжено закрылками 8, синхронно работающими с механизацией 4-5 КОС 3. Развитое V-образное оперение смонтировано на конце хвостовой балки 2, имеет кили 9 с рулевыми поверхностями 10. В задних продолговатых окончаниях гондол 11, смонтированных на законцовках V-образного оперения 9 с трехлопастными левым 12 и правым 13 толкающими винтами. Над моторным отсеком 14 фюзеляжа 1 смонтированы верхний 15 и нижний 16 соосные однолопастные НВ, которые для создания от НВ полной компенсации реактивных крутящих моментов вращаются соответственно по часовой и против часовой стрелки (см. фиг. 1б) и снабжены их профилированными противовесами 17. Однолопастные НВ соосные 15-16 выполнены без автоматов перекоса и с жестким креплением их лопастей и телескопических противовесов 17, выполненных в виде сегментов обтекателей втулок 18 и 19 соответствующих НВ. Между парой втулок 18-19 имеется обтекатель 20 колонки валов соосных НВ 15-16 с аэродинамическими горизонтальными гребнями 21, параллельно смонтированными с каждой задней боковой поверхности каплевидного в плане обтекателя 20. Во время аварийной посадки при выполнении ВВП и отказе двигателей СУ его широкохордовые 15-16 НВ работают на режиме авторотации и разгружают КОС 3, а во время горизонтального полета и отказе его двух ТВаД - лопасти толкающих винтов 12-13 флюгируются для предотвращения авторотации с одновременным автоматическим отклонением закрылок 4 и флапперонов 5 на КОС 3 и закрылок 8 на ПГО 7 автоматически отклоняются на угол 30°, а при выполнении КВП в винтокрылой конфигурации и для уменьшения потерь в вертикальной тяге НВ 15-16 - на угол 47°. Двухдвигательная СУ имеет в передних окончаниях моторного отсека 14 левый и правый ТВаД с задним выводом вала для отбора их взлетной их мощности. Каждый из ТВаД, образуя с соответствующим соединительным валом и главным редуктором синхронизирующую систему, снабжен муфтой сцепления (на фиг. 1 не показаны). Избыточная тяговооруженность СУ обеспечивает продолжение полета при одном работающем ТВаД и вращение соосных 15-16 НВ во время переходного режима, что создает возможность осуществления полета или аварийной посадки с авторотирующими НВ 15-16, что повышает уровень безопасности полетов. Передача взлетной мощности при выполнении как ВВП и зависания в вертолетной конфигурации обеспечивается главным редуктором посредством соосной системы валов только на 15-16 НВ, так и в самолетной полетной конфигурации - только на толкающие винты 12-13 посредством продольно-поперечных валов, проложенных (на фиг. 1 не показаны) вдоль хвостовой балки 2 и в носке V-образного оперения 9 и также от работающих ТВаД, отключенных при этом от системы трансмиссии привода НВ 15-16. Планер, кабина и грузопассажирский отсек плавающего СВСА выполнены из композитных материалов и углеродного волокна, каркас и несущие элементы фюзеляжа - из сплавов на основе алюминия. Боковые обтекатели 22 фюзеляжа-лодки 1 выполнены при виде спереди в виде граненной треугольной формы, образующей при виде сверху ромбовидную с округленными вершинами конфигурацию фюзеляжа. Четырехопорное колесное шасси, главные опоры с колесами 23 убираются в задние отсеки боковых обтекателей 22 фюзеляжа-лодки 1, вспомогательные опоры с колесами 24 - в передние отсеки центроплана ПГО 7.
Управление преобразуемым СВСА обеспечивается общим и дифференциальным изменением шага соосной группы НВ 15-16 и отклонением рулевых поверхностей: флапперонов 5 на КОС 3 и рулей высоты 10 на V-образном оперении 9. При крейсерском полете подъемная сила создается ПГО 7, КОС 3 в системе крыльев ХОС совместно с зафиксированными лопастями-крыльями НВ 15-16, образующими схему биплан-тандем с разноуровневыми верхними лопастями-крыльями НВ 15-16, размещенными позади и над консолями КОС 3 (см. фиг. 1б), горизонтальная тяга - толкающими винтами 12-13 на законцовках V-образного оперении 9, на режиме висения только соосными НВ 15-16, на режиме перехода - ПГО 7, КОС 3 и НВ 15-16. При переходе к вертикальному взлету-посадке (висению) закрылки 4 с флапперонами 5 консолей с обратным сужением (см. фиг. 1б) КОС 3 синхронно отклоняются с закрылками 8 ПГО 7 на максимальные их углы. После создания подъемной тяги соосными 15-16 НВ обеспечиваются режимы ВВП и зависания с использованием только НВ 15-16 (см. рис. 1а). При синфазном отклонении серво-элевонов 24 (см. фиг. 1б) НВ 15-16 вверх или вниз при прохождении их лопастей над хвостовой балкой 2, изменяют продольную балансировку, а при дифференциальном их отклонении вверх-вниз при прохождении лопастей НВ 15-16 с противоположных боковых сторон фюзеляжа-лодки 1, изменяют балансировку по крену при выполнении ВВП и зависания. При висении на вертолетных режимах полета СВСА путевое управление осуществляется дифференциальным изменением шага соосных верхнего 15 и нижнего 16 НВ.
После вертикального взлета и набора высоты, убирается механизация ПГО 7 и КОС 3 и для перехода на самолетный горизонтальный режим полета лопасти-крылья 15-16 однолопастных НВ синхронно останавливаются и фиксируются с углом χ=+13° стреловидности (см. фиг. 1б) и затем создается совместная маршевая тяга двух толкающих винтов 12-13 (см. рис. 1б) и производится скоростной крейсерский полет, при котором путевое управление обеспечивается рулями направления 10 двух килей 9. Продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением рулей высоты 10 V-образного хвостового оперения 9 и внешних флапперонов 5 КОС 3 соответственно.
Таким образом, многоцелевой СВСА с двухвинтовыми системами ДПС-Х2 и ДСНС-Х2, имеющими толкающие винты на законцовках V-образного оперения и однолопастные соосные НВ, нижний и верхний из которых смонтированы над моторным отсеком фюзеляжа-лодки, представляет собой скоростной преобразуемый винтокрылый летательный аппарат, который изменяет свой полетную конфигурацию только благодаря фиксации симметричных поверхностей лопастей-крыльев НВ относительно продольной оси. Флюгерно-реверсивные толкающие винты, создающие маршевую тягу, обеспечивают повышение скорости на самолетных режимах полета, но и уменьшение дистанции при взлете с коротким разбегом. Система крыльев ХОС с КОС и лопастями-крыльями НВ, создавая с ПГО за сет увеличения в 1,15-1,2 раза коэффициента их совместного поднятия в производстве подъемной силы, позволит наравне с высокой тяговооруженностью СУ реализовать возможность выполнения технологии ВВП и КВП и, особенно, палубных СВСА. Выбор такой аэродинамической схемы не случаен, т.к. подобная компоновка, имея ромбовидный в плане фюзеляж-лодку с боковыми обтекателями, низко- и высокорасположенные ПГО и КОС, повышает продольно-поперечную остойчивость при морском базировании, но и, обладая аэродинамической симметрией, исключает потерю подъемной силы из-за срыва потока с отступающих лопастей соосных НВ на режиме горизонтального полета в перегрузочной винтокрылой конфигурации, компенсируя оную их противовращением.
Однако нет никаких сомнений в том, что на пути освоения СВСА, используя вышеназванные преимущества, предстоит преодолеть еще немало трудностей и проблем. Это в первую очередь относится к решению проблем аэродинамической интерференции соосных НВ и возможности обеспечения устойчивости и управляемости на режимах ВВП и зависания при их работе в синхронно-сбалансированной и симметричной ДСНС-Х2 однолопастных НВ, которые весьма перспективны в качестве останавливаемых и не убираемых в полете винтов-крыльев, что исключит наличие узлов переворота лопастей (для организации симметричных поверхностей крыла относительно продольной оси) или весьма конструктивно сложных систем их складывания и уборки НВ. Несомненно, для использования концепции ДСНС-Х2 с ДПС-Х2 требуются минимальные изменения существующих конструкций вертолетов соосной схемы, то доведение, сокращая сроки их освоения, соответственно до разведывательно-ударных и противолодочных и противокорабельных БВСА или поисково-спасательных и транспортно-десантных СВСА (см. табл. 1) - задача достаточно просто технически реализуемая и предпочтительная, особенно, для нужд палубной авиации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| ПРОТИВОКОРАБЕЛЬНЫЙ РАКЕТНЫЙ КОМПЛЕКС С ЛЕТАЮЩИМ РОБОТОМ-НОСИТЕЛЕМ РАКЕТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2706295C2 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2017 |
|
RU2673317C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2699514C1 |

Изобретение относится к области авиационной техники и может быть использовано в конструкции скоростных вертолетов. Скоростной вертолет-самолет-амфибия (СВСА) выполнен по двухвинтовой соосной схеме, имеет двигатель силовой установки (СУ), передающий крутящий момент на несущие и задний винты, смонтированные соответственно над центром масс и на конце хвостовой балки за хвостовым оперением. Двухвинтовая соосная несущая система (ДСНС) включает однолопастные несущие винты (НВ) с профилированными противовесами, обеспечивающие создание вертикальной тяги только при выполнении ВВП или КВП. Двухвинтовая пропульсивная система (ДПС) имеет на концах гондол толкающие винты, смонтированные на законцовках V-образного оперения для создания маршевой тяги при скоростном горизонтальном полете и зафиксированных двух лопастях-крыльях верхнего и нижнего НВ, размещенных над двигательным отсеком фюзеляжа. Крыло обратной стреловидности имеет отрицательный угол ϕ=-5° поперечного V при отрицательном угле χ=-10° стреловидности и обратное сужение. Обеспечивается повышение скорости и дальности полета, уменьшение вибраций и исключение возникновения резонанса при использовании останавливаемых и не убираемых в полете лопастей. 2 з.п. ф-лы, 1 ил., 1 табл.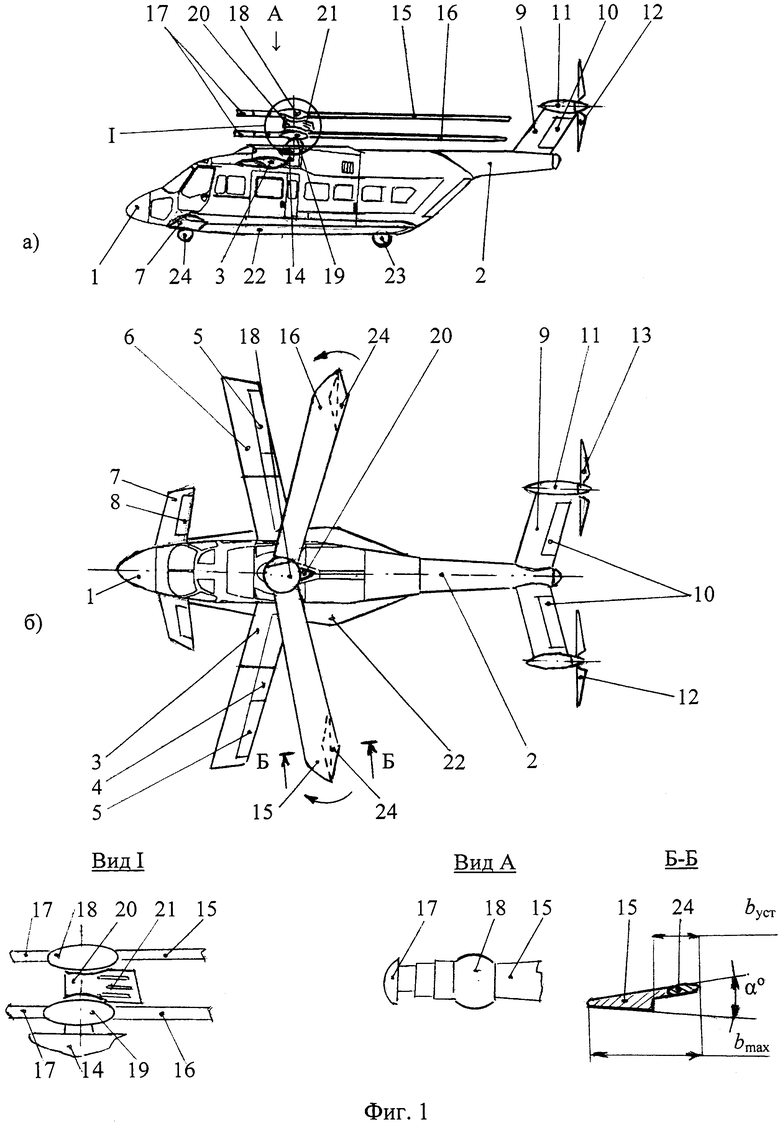
1. Скоростной вертолет-самолет-амфибия, выполненный по двухвинтовой соосной схеме, имеет двигатель силовой установки (СУ), передающий крутящий момент через главный редуктор и систему валов трансмиссии на несущие и задний винты, смонтированные соответственно над центром масс и на конце хвостовой балки за хвостовым оперением, отличающийся тем, что он снабжен упомянутой двухвинтовой соосной несущей системой (ДСНС), включающей однолопастные несущие винты (НВ) с профилированными противовесами, обеспечивающие создание вертикальной тяги только при вертикальном или коротком взлете/посадке (ВВП или КВП), и двухвинтовой пропульсивной системой (ДПС), имеющей на концах гондол толкающие винты, смонтированные на законцовках V-образного оперения для создания маршевой тяги при скоростном горизонтальном полете и зафиксированных двух лопастях-крыльях верхнего и нижнего НВ, размещенных над двигательным отсеком фюзеляжа, снабженным надфюзеляжным воздухозаборником, смонтированным спереди центроплана высокорасположенного крыла обратной стреловидности (КОС), имеющего как отрицательный угол ϕ=-5° поперечного V при отрицательном угле χ=-13° стреловидности, так и обратное сужение с закрылками и внешними флапперонами, уменьшающими при максимальном их отклонении во время выполнения ВВП и зависания потери в вертикальной тяги ДСНС-Х2, и выполнен по аэродинамической схеме «утка» с КОС и возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета с ДСНС-Х2 и ДПС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДПС-Х2 соответственно с однолопастными НВ, работающими на режимах близких к их авторотации или при зафиксированных лопастях-крыльях НВ и синхронно втянутых телескопических их противовесов в обтекатели втулок соответствующих НВ, лопасти которых закреплены под положительным углом χ=+13° стреловидности и вынесены от плоскости симметрии наружу в противоположные стороны, увеличивая как площадь и несущую способность ПГО в схеме «утка» с системой крыльев с X-образной стреловидностью (ХОС), включающей КОС большого удлинения и разноуровневые широкохордовые лопасти-крылья НВ, размещенные над и позади консолей КОС, но и обратно, при этом нижняя часть фюзеляжа для повышения мореходности и обеспечения плавучести выполнена в виде герметизированной лодки, имеющей днище килеватой формы и основной силовой элемент в виде коробчатой балки с внешним ее контуром в виде граненной треугольной формы боковых обтекателей при виде спереди, изготовленной, образуя при виде сверху ромбовидную с округленными вершинами конфигурацию фюзеляжа-лодки, из композиционных материалов и снабженной центральным основным топливным баком и грузовым отсеком для основных узлов и агрегатов четырехопорного колесного шасси, две одноколесные опоры из которых убираются в ниши центроплана переднего горизонтального оперения (ПГО), а две основные двухколесные стойки - в задние отсеки боковых обтекателей фюзеляжа-лодки, причем низкорасположенное ПГО, выполненное, повышая продольно-поперечную остойчивость на воде, полностью герметизированным при положительном угле ψ=+5° поперечного V, снабжено по всему его размаху закрылками, синхронно работающими с механизацией КОС, снабженного внешними отклоняемыми вниз концевыми частями, уменьшающими стояночную площадь при зафиксированных лопастях-крыльях НВ вдоль оси симметрии и установленных назад по полету над кормовой частью хвостовой балки, при этом в ДПС-Х2 каждый флюгерно-реверсивный толкающий винт, имеющий как жесткое крепление лопастей, так и возможность изменения общего его шага и установки его лопастей во флюгерное положение после его остановки и фиксации для осуществления аварийного режима посадки с авторотирующими НВ, но и возможность подключения к вспомогательной силовой установки (ВСУ) для создания прямой и обратной тяги при выполнении зависания для соответствующего поступательного полета вдоль продольной его оси, причем в полностью симметричной и синхронно-сбалансированной ДСНС-Х2 однолопастные НВ, создающие воздушные потоки, которые, снижая шум и вибрации, но и уменьшая аэродинамическую интерференцию, не взаимодействуют с толкающими винтами в ДПС-Х2 и выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между винтами в разнесенной паре по высоте НВ, например, при виде сверху верхний и нижний НВ вращаются соответственно по часовой и против часовой стрелки так, что соответствующие наступающие их лопасти проходили над левым и правым бортами фюзеляжа от носовой к кормовой его части и, как следствие, обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечного и путевого управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком хвостовой балки, что исключает резонансные ее колебания совместно с консолями V-образного оперения, при этом система трансмиссии обеспечивает передачу мощности от двух, например, турбовальных двигателей (ТВаД), левый и правый из которых имеет задний вывод вала для отбора взлетной мощности и смонтирован перед центром масс в передней части моторного отсека и связан посредством муфты сцепления с соответствующим входным валом, передающим крутящий момент от каждого ТВаД на главный многоуровневый редуктор, имеющий несущий и маршевый выходные потоки, связанные через муфты сцепления соответственно с соосными вертикальными выходными валами для НВ и продольным выходным задним валом с кормовым промежуточным V-образным при виде спереди редуктором с соответствующими валами, проложенными в носке консолей V-образного оперения для левого и правого толкающих винтов, причем при выполнении ВВП и зависания плавное перераспределение мощности СУ от двух ТВаД обеспечивается главным редуктором только на однолопастные НВ ДСНС-Х2 в объеме 100% от располагаемой взлетной их мощности, используемой на вертолетных режимах полета при удельной нагрузке на мощность СУ, равной ρN=2,8 кг/л.с., а на самолетных режимах полета при зафиксированных соответствующим образом лопастях-крыльях НВ системой трансмиссии перераспределяется 60% от взлетной мощности СУ только на толкающие винты ДПС-Х2, но и обратно.
2. Скоростной вертолет-самолет-амфибия по п. 1, отличающийся тем, что упомянутые однолопастные НВ со ступенчатым профилем концевой части на одной третьей радиуса каждой с обратным сужением лопасти, имеющей концевую хорду лопасти в 2,0 раза больше ее корневой хорды и клиновидный профиль с углом α=10° и непрерывной нижней поверхностью, выполнен с верхним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой, имея вогнутые во внутрь задние кромки лопасти, создают в точке максимальной ее хорды (bmaxHB), совмещенной в уступе-вырезе с меньшей диагональю ромбовидной в плане формы, образующей как конфигурацию профиля ступеньки по ширине и глубине - это соответственно 1/2 от хорды bmaxHB и 2/3 от толщины cmaxHB, так и заостренную законцовку лопасти, имеющую параболическую переднюю кромку и обратной стреловидности заднюю кромку, причем упомянутые телескопические противовесы НВ имеют радиус (rтп) во втянутом и выдвинутом положении равновеликий радиусу обтекателя втулки НВ, имеющего диаметрально размещенные срезы в виде круговых сегментов, хорды которых равновелики корневым хордам НВ и противовеса, и 30% от радиуса НВ соответственно, при этом каждый противовес, имеющий корневую и концевую хорды соответственно равновеликую и в 1,2 раза меньше корневой хорды НВ, выполнен с концевой частью в виде ответного сегмента окружности с диаметром равновеликим обтекателю втулки НВ, сопрягаемого при его втягивании со срезом кругового сегмента втулки, образуя удобообтекаемую ее округлую в плане форму, причем при выполнении КВП и винтокрылого горизонтального полета консоли КОС, имеющие валовые закрылки с корневыми хордами в  больше концевых хорд, которые при соответствующем их отклонении преобразуют прямые консоли КОС в консоли с обратным сужением, создающим повышение несущей их способности на винтокрылых режимах полета при обдуве их консолей в зоне максимальных индуктивных скоростей воздушного потока от однолопастных НВ, работающих совместно с маршевой тягой ДПС-Х2, продольная ось толкающих винтов которых размещена по продольной линии, проходящей при виде сбоку выше центра масс и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом НВ снабжены системой обтекателей, имеющей как обтекатели втулок, каждый из которых имеет верхний и нижний выпуклые профили, имеющие эллиптическую конфигурацию, так и обтекатель колонки соосных валов, размещенный между соответствующими обтекателями втулок и уменьшающий общее сопротивление и разнос между лопастью нижнего и верхнего НВ не менее 13% от их радиуса, причем обтекатель, колонки валов имеющий при виде сверху каплевидную форму и систему предотвращения неуправляемого вращения обтекателя вала вокруг оси вращения, смонтирован так, что имеет верхний и нижний щелевые зазоры, выполненные зеркально эллиптическим поверхностям соответствующих обтекателей втулок НВ, при этом обтекатель колонки валов, облегчающий обтекание, уменьшающий разделение потока и сопротивление, снабжен при виде сбоку горизонтальными аэродинамическими равновеликими гребнями, параллельно смонтированными по три с каждой задней боковой его вертикальной поверхности так, что каждый центральный, установленный по ее середине и ближе к задней его кромке, имеющей обратную стреловидность, а верхний и нижний аэродинамические гребни в свою очередь установлены дальше от нее и при этом равноудалены от центрального, причем в системе крыльев ХОС лопасти-крылья НВ и КОС имеют равновеликие площади, а площадь КОС совместно с ПГО составляет 60% от общей площади ПГО с крыльями ХОС в самолетной полетной конфигурации.
больше концевых хорд, которые при соответствующем их отклонении преобразуют прямые консоли КОС в консоли с обратным сужением, создающим повышение несущей их способности на винтокрылых режимах полета при обдуве их консолей в зоне максимальных индуктивных скоростей воздушного потока от однолопастных НВ, работающих совместно с маршевой тягой ДПС-Х2, продольная ось толкающих винтов которых размещена по продольной линии, проходящей при виде сбоку выше центра масс и, следовательно, уменьшает возможность возникновения кабрирующего момента, при этом НВ снабжены системой обтекателей, имеющей как обтекатели втулок, каждый из которых имеет верхний и нижний выпуклые профили, имеющие эллиптическую конфигурацию, так и обтекатель колонки соосных валов, размещенный между соответствующими обтекателями втулок и уменьшающий общее сопротивление и разнос между лопастью нижнего и верхнего НВ не менее 13% от их радиуса, причем обтекатель, колонки валов имеющий при виде сверху каплевидную форму и систему предотвращения неуправляемого вращения обтекателя вала вокруг оси вращения, смонтирован так, что имеет верхний и нижний щелевые зазоры, выполненные зеркально эллиптическим поверхностям соответствующих обтекателей втулок НВ, при этом обтекатель колонки валов, облегчающий обтекание, уменьшающий разделение потока и сопротивление, снабжен при виде сбоку горизонтальными аэродинамическими равновеликими гребнями, параллельно смонтированными по три с каждой задней боковой его вертикальной поверхности так, что каждый центральный, установленный по ее середине и ближе к задней его кромке, имеющей обратную стреловидность, а верхний и нижний аэродинамические гребни в свою очередь установлены дальше от нее и при этом равноудалены от центрального, причем в системе крыльев ХОС лопасти-крылья НВ и КОС имеют равновеликие площади, а площадь КОС совместно с ПГО составляет 60% от общей площади ПГО с крыльями ХОС в самолетной полетной конфигурации.
3. Скоростной вертолет-самолет-амфибия по п. 2, отличающийся тем, что упомянутые клиновидные профили лопастей НВ и непрерывной верхней их поверхностью выполнены с нижним уступом-вырезом ромбовидной в плане формы, внешние выступающие стороны которой образуют упомянутый равнобедренный треугольник в плане, выполняющий на упомянутых соосных верхнем и нижнем НВ роль рулевых поверхностей - элевонов, снабженных сервоприводом и возможностью при выполнении ВВП и зависания на вертолетных режимах полета их синхронного отклонения в вертикальной плоскости таким образом, что как при дифференциальном их отклонении вниз/вверх и вверх/вниз и прохождении при этом лопастей НВ с противоположных правой/левой боковых сторон фюзеляжа, изменяют балансировку по крену соответственно влево и вправо, так и синфазном их отклонении вниз/вверх при прохождении лопастей НВ над хвостовой балкой, изменяют балансировку по тангажу соответственно пикирующий и кабрирующий моменты.
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| Способ получения деформирующих усилий | 1950 |
|
SU129485A1 |
| Способ производства кормовых антибиотиков и устройство для осуществления этого способа | 1959 |
|
SU127364A1 |
| US 7665688 B2, 23.02.2010 | |||
| EP 1884047 B1, 30.07.2014. | |||

