Изобретение относится к области авиационной техники и может быть использовано в конструкции дистанционно пилотируемых вертолетов-самолетов, высокоскоростных пилотируемых конвертопланов - преобразуемых винтокрылых самолетов вертикального взлета и посадки с поворотными винтами, совмещающих особенности вертолетов и самолетов наземного (безаэродромного) и корабельного (аэродромного) базирования.
Известен дистанционно пилотируемый летательный аппарат мод. «Пчела-2» (Россия) [1, стр.690], содержащий моноплан с высокорасположенным прямым крылом, силовую установку, включающую двигатель с редуктором и толкающим винтом, расположенным в хвостовой части фюзеляжа, кадровую телевизионную камеру и строчный инфракрасный сканер, смонтированными в носовой части фюзеляжа, отсек с парашютом и шасси четырехстоечное рессорного типа для амортизационной посадки.
Признаки, совпадающие, - наличие в дистанционно пилотируемом летательном аппарате (ДПЛА) аппаратуры (фото, телевизионной и инфракрасной) для видовой разведки, телевизионного и инфракрасного наблюдения местности в реальном масштабе времени, а также широкополосного передатчика с антенной для передачи изображения по телевизионному радиоканалу. Двигатель с толкающим винтом смонтирован в конце хвостовой части фюзеляжа ДПЛА и обеспечивает после старта с катапульты только горизонтальную тягу и только при крейсерском его полете со скорость до 180 км/ч.
Причины, препятствующие поставленной задаче: первая - это то, что способ старта ДПЛА - катапультный, с использованием двух одноразовых пороховых ускорителей и, кстати, весьма дорогих. Вторая - это то, что в ДПЛА мод. «Пчела-2» недостатками являются как вибрации оптической оси телевизионной камеры, порождаемые работой двигателя, так и отдаление ее от центра масс, а также цифровая фильтрация первичного видеосигнала, после чего изображение приобретает несколько искусственно-рисованный вид, и различимость целей невысокая. Третья - это то, что при прямой радиовидимости продолжительность полета ДПЛА составляет не более двух часов, а дальность (радиус) его действия - не более 50 км. Четвертая - это то, что после каждой амортизационной посадки ДПЛА «Пчела-2» повторная укладка парашюта требует специального оборудования для сушки и прессовки, что это весьма сложно и обременительно. Пятая и основная причина неприемлемости поставленной задаче заключается в низкой кратности применения одного летательного аппарата. Среднее количество применений одного ДПЛА до отправки ДПЛА в заводской ремонт или до его списания составляет всего пять раз.
Известен дистанционно пилотируемый летательный аппарат мод. «Пионер-1» (Израиль) [1, стр.690], содержащий моноплан двухбалочной схемы с высокорасположенным прямым свободнонесущим крылом, двухкилевое оперение, смонтированное к консолям крыла и снабженное стабилизатором, аппаратуру для телевизионного и инфракрасного наблюдения местности, смонтированную под фюзеляжем и центром масс, с задним расположением силовую установку, включающую двигатель с редуктором и толкающим винтом, трехстоечное колесное шасси, неубирающееся с передней опорой.
Признаки, совпадающие, - наличие моноплана двухбалочной схемы с трехколесным шасси и передней опорой. Разнесенные балки соединяют крыло с двухкилевым оперением, которое снабжено стабилизатором. Обеспечение длительных полетов днем и ночью для телевизионного или инфракрасного наблюдения местности и целей на ней в реальном масштабе времени. При аэродромном базировании и взлете (посадке) по-самолетному удаление ДПЛА от базовой автоматизированной рабочей станции допустимо на расстоянии до 70 км и наличии прямой радиовидимости. Кроме того, оператор комплекса может как контролировать и корректировать его полет по командно-телеметрической радиолинии, так и наблюдать телевизионное изображение подстилающей поверхности от целевой нагрузки ДПЛА, поступающее по телевизионному радиоканалу.
Причины, препятствующие поставленной задаче: первая - это то, что оптическая и акустическая заметность ДПЛА весьма значительная и составляет дальность обнаружения по шуму и невооруженным глазом - 3,0 км. Вторая - это то, что диапазон высот применения ДПЛА - 100…3500 м при скорости полета 100…130 км/ч. Третья - это то, что телевизионная разведывательная аппаратура по надежности разведывательных данных и распознавании небольших предметов через его телевизионную систему низкая, и распознать объект с точностью до типа, более того до конкретного экземпляра, с барражирующего беспилотного летательного аппарата в реальном масштабе времени непросто.
Наиболее близким к предлагаемому изобретению является сверхлегкий экспериментальный самолет с укороченным взлетом и посадкой (Россия) [2, стр.37], представляющий собой моноплан с горизонтальным оперением и со среднерасположенным трапециевидным крылом, имеющим впереди его наплывы, содержащий короткий фюзеляж, силовую установку, включающую двигатель, редуктор и с задним расположением поворотные винты, обеспечивающие горизонтальную тягу и соответствующим отклонением между разнесенного двухкилевого оперения вертикальную или наклонную тягу, отсек для целевой нагрузки, расположенный в фюзеляже под центром масс, трехстоечное колесное шасси, неубирающееся с передней носовой опорой.
Признаки, совпадающие, - наличие моноплана с горизонтальным оперением и со среднерасположенным трапециевидным крылом, снабженным наплывами с прямой стреловидностью и разнесенным двухкилевым оперением, поворотными (отклоняемыми между разнесенным двухкилевым оперением) соосными винтами, расположенными в задней части фюзеляжа и обеспечивающими горизонтальную тягу и соответствующим отклонением вниз от горизонтального положения вертикальную на угол 90° или наклонную тягу на угол 60°, соответственно, при посадке с коротким пробегом и укороченным взлетом. Трехстоечное колесное шасси с передней носовой опорой.
Причины, препятствующие поставленной задаче: первая - это то, что средства аэродинамической балансировки при помощи подвижных консолей крыла предопределяют конструктивно сложное трапециевидное крыло, снабженное сложной системой поворота и механизации крыла, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что подвижные консоли крыла с увеличением их угла отклонения в плоскости хорды крыла вперед на некоторые углы на переходных режимах полета создают опасность появления пикирующего момента до создания горизонтальным оперением необходимой парирующей силы, что снижает надежность и безопасность. Это предопределяет удаление горизонтального оперения от центра масс и, следовательно, увеличение длины разнесенных балок и планера, что создает проблемы при транспортировании и ограничивает мобильность, а также усложняет продольную балансировку на переходных режимах полета и не обеспечивает достаточную стабильность управления. Третья - это то, что при взлете и посадке самолета соосные трехлопастные винты, имеющие взаимно противоположное вращение, при помощи гидравлического привода поворачиваются относительно оси редуктора вниз, создавая тем самым вертикальную тягу (двухбалочная схема в полной мере способствует свободному отклонению винтов между разнесенных балок). При этом вынужденно близкое расположение осевой вертикальной линии соосных винтов к центру масс самолета предопределяет в отклоненном вниз положении затенение их межбалочной частью крыла, создавая при этом значительную потерю в вертикальной тяге. В такой двухвинтовой соосной схеме присутствует и неблагоприятное взаимное влияние спаренных винтов, которое в отдельных случаях может приводить к их перехлесту, а также весьма сложная схема редукции. Все это ограничивает повышение взлетного веса и увеличение весовой отдачи, эксплуатационных характеристик и показателей транспортной эффективности, а также максимальной крейсерской скорости полета.
Предлагаемым изобретением решается задача в указанном выше известном сверхлегком экспериментальном самолете с укороченным взлетом и посадкой значительного повышения взлетного веса и увеличения весовой отдачи, упрощения конструкции и повышения безопасности и управляемости при переходных маневрах, повышения эксплуатационных характеристик и показателей транспортной эффективности, а также аэродинамической эффективности, улучшения решения проблемы асимметричности осевой нагрузки и уменьшения рыскания на самолетных режимах полетов, упрощения продольного управления при висении и улучшения взлетно-посадочных характеристик.
Отличительным признаком предлагаемого изобретения от указанного выше известного сверхлегкого экспериментального самолета с укороченным взлетом и посадкой, наиболее близкого к нему, является наличие того, что он снабжен возможностью преобразования его полетной конфигурации с вертолета двухвинтовой продольной схемы в полетную конфигурацию самолета с расположенными тандемом носовым и хвостовым, соответственно, тянущим и толкающим винтами и обратно, при этом удобообтекаемой формы фюзеляж, имеющий разноуровневые носовую и хвостовую его части и представляющий собой в плоскости симметрии S-образный профиль, дополнительно оснащен носовым редуктором, выходной вал которого снабжен возможностью его поворота с тянущим винтом относительно оси редуктора вверх от горизонтального положения вдоль плоскости симметрии, а выходной вал хвостового редуктора с толкающим винтом - вниз синхронно носовому, причем горизонтальные оси выходных валов носового и хвостового редукторов, смонтированных на разных уровнях, расположены относительно плоскости средней линии крыла, соответственно, ниже и вдоль последней, при этом горизонтальная ось выходного вала носового редуктора размещена вдоль плоскости средней линии цельноповоротного горизонтального оперения, смонтированного перед наплывами, имеющими в плане V-образные изломы, образующие переменную стреловидность по передним их кромкам и объединяющие фюзеляж и крыло в единую плавнообразованную конструкцию, киль-шайбы хвостового оперения, установленные на консолях крыла, вынесены и за его заднюю кромку, смонтированы на гондолах, продленных и за носок крыла в точки сопряжения передних кромок крыла и наплывов, при этом в передних окончаниях каждой гондолы смонтированы две телевизионные камеры переднего панорамного видового обзора горизонта, обеспечивающие условия истинно дистанционного пилотирования оператором, трансмиссия оснащена синхронизирующим валом, проложенным внутри фюзеляжа и вдоль плоскости симметрии, обеспечивающим равномерное распределение мощности между носовым и хвостовым винтами.
Благодаря наличию этих признаков это позволит упростить конструкцию и полностью исключить разнесенные балки и механизмы, отклоняющие консоли крыла в плоскости хорды вперед на некоторые углы, соответствующие условиям балансировки при переходных режимах полета. Дистанционно пилотируемый вертолет-самолет снабжен возможностью преобразования его полетной конфигурации с вертолета двухвинтовой продольной схемы в полетную конфигурацию самолета с расположенными тандемом носовым и хвостовым, соответственно, тянущим и толкающим винтами и обратно, при этом удобообтекаемой формы фюзеляж, имеющий разноуровневые носовую и хвостовую его части и представляющий собой в плоскости симметрии S-образный профиль, оснащен носовым редуктором, выходной вал с винтом которого снабжен возможностью их отклонения относительно оси редуктора вверх от горизонтального положения вдоль плоскости симметрии, а выходной вал хвостового редуктора с винтом - вниз синхронно носовому. Это позволит повысить эффективность винтомоторной группы, а также значительно увеличить взлетный вес и весовую отдачу. Горизонтальные оси выходных валов носового и хвостового редукторов смонтированы относительно плоскости средней линии крыла, соответственно, ниже и вдоль последней, при этом горизонтальная ось первого вала расположена вдоль плоскости средней линии цельноповоротного горизонтального оперения, смонтированного перед наплывами, передняя кромка которых выполнена в плане в виде V-образных изломов, объединяющих фюзеляж и крыло в единую плавнообразованную интегральную конструкцию. Это позволит повысить эффективность аэродинамической схемы и уменьшить рыскание за счет того, что тандемное расположение винтов на самолетных режимах полета улучшает решение проблемы асимметричности осевой нагрузки. Кроме того, воздушные потоки, создаваемые толкающим винтом, интенсивно обдувают верхнюю поверхность плоскости крыла и, тем самым, значительно улучшают взлетно-посадочные характеристики. Киль-шайбы хвостового оперения, установленные на консолях крыла, вынесены и за его заднюю кромку, смонтированы на гондолах, продленных и за переднюю кромку крыла в точки ее сопряжения с V-образными изломами наплывов, при этом в передних окончаниях каждой гондолы смонтированы две телевизионные камеры переднего панорамного видового обзора горизонта. Это значительно повышает путевую устойчивость, создает условия истинно дистанционного пилотирования и управления оператором с наземного (корабельного) пульта многоцелевого беспилотного вертолетно-самолетного комплекса.
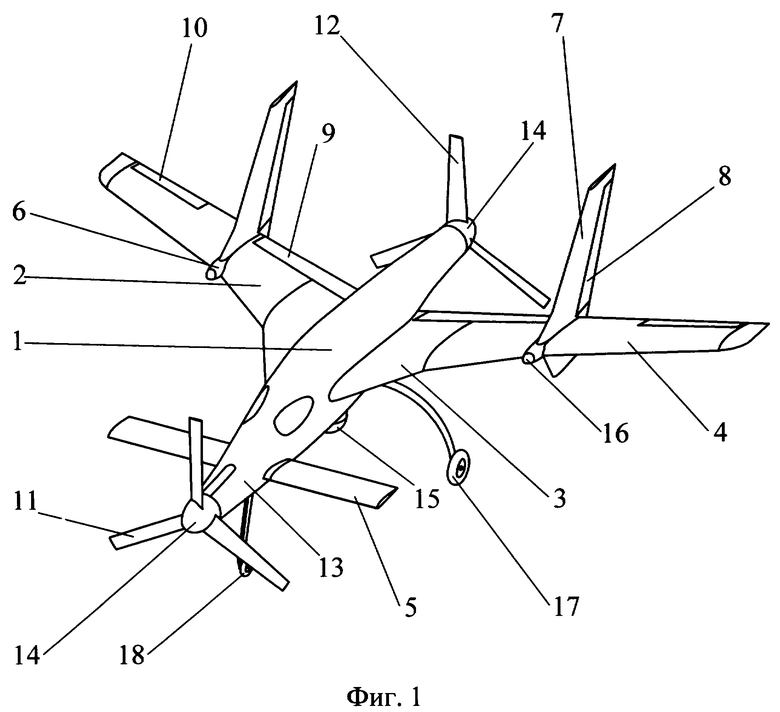
Предлагаемое изобретение многоцелевого дистанционно пилотируемого вертолета-самолета (ДПВС) и варианты его использования в условиях различной полетной конфигурации иллюстрируются общими видами, представленными на фиг.1…3.
На фиг.1 изображен ДПВС в полетной конфигурации самолета, общий вид в триметрической проекции с расположением тандемом поворотных винтов носового и хвостового в двухвинтовой движительной системе на крейсерских режимах полета.
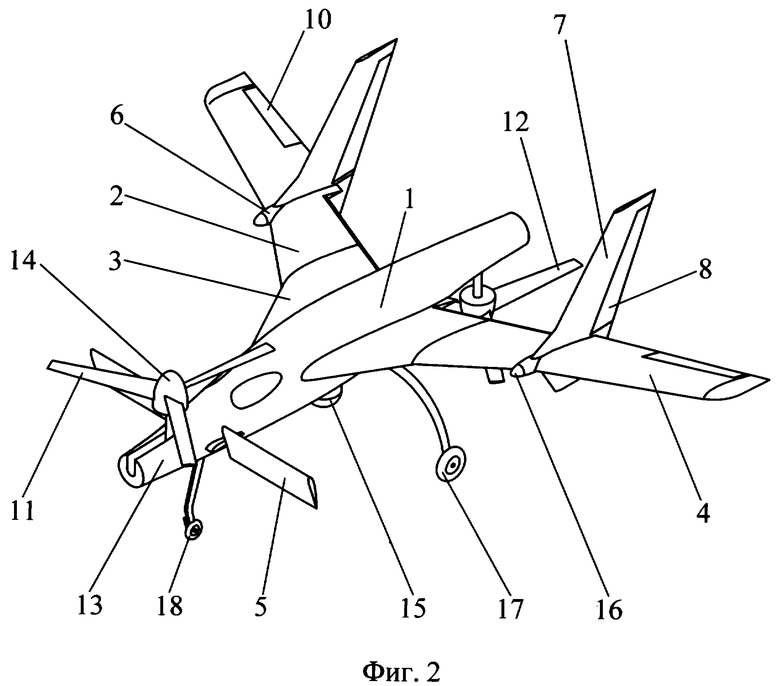
На фиг.2 изображен ДПВС в вертолетоподобной полетной конфигурации, общий вид в изометрической проекции с расположением поворотных винтов в двухвинтовой продольной движительной системе на режимах вертикального взлета, посадки и висения.
На фиг.3 изображен ДПВС в полетной конфигурации самолета, общий вид в изометрической проекции с расположением носового и хвостового поворотных винтов, отклоненных на угол 65°, при взлете с коротким разбегом и посадке с коротким пробегом.
Многоцелевой дистанционно пилотируемый вертолет-самолет, выполненный по аэродинамической схеме «утка» блочно-модульной конструкции и представленный на фиг.1…3, содержит удобообтекаемой формы фюзеляж 1, имеющий разноуровневые носовую и хвостовую его части и представляющий собой в плоскости симметрии S-образный профиль. Среднерасположенное трапециевидное крыло 2 имеет впереди его наплывы 3 с V-образными в плане изломами, плавно переходящими в концевые части 4 крыла 2 и объединяющими фюзеляж 1 и крыло 2 в единую плавнообразованную интегральную конструкцию (см. фиг.1). Перед наплывами 3 крыла 2 смонтировано переднее цельноповоротное горизонтальное оперение (ЦПГО) 5. Гондолы 6, продленные от носка крыла 2 и за заднюю его кромку, соединяют крыло 2 с разнесенным двухкилевым оперением, киль-шайбы 7 которого, установленные на консолях крыла 2, вынесены и за заднюю его кромку и снабжены рулями направления 8. Крыло 2, имеющее рулевые поверхности 9 и 10, работающие в режиме закрылок и элеронов, снабжено для улучшения устойчивости и управляемости ДПВС в полете концевыми частями 4 крыла 2, отклоненными вверх. При этом концевые части 4 выполнены отклоняющимися вверх от гондол 6 и отсоединяющимися (могут открепляться по необходимости для удобства транспортирования). Силовая установка располагается в фюзеляже 1 и смонтирована в моторном отсеке, который изолирован от других противопожарными перегородками. Двигатель силовой установки; например поршневой (на фиг.1…3 не показан), размещен в зависимости от обеспечения правильного расположения центра масс в передней или задней части фюзеляжа 1 и установлен с максимальной его простотой обслуживания и эксплуатации. Мощность от двигателя передается поворотным винтам посредством системы трансмиссии, связанной с носовым и хвостовым редукторами (на фиг.1…3 не показаны). Выходной вал первого снабжен возможностью его поворота с тянущим винтом 11 относительно оси редуктора вверх от горизонтального положения вдоль плоскости симметрии, а выходной вал второго редуктора с толкающим винтом 12 - вниз синхронно первому (см. фиг.2). При этом поворот винтов тянущего 11 и толкающего 12, преобразующий его полетную конфигурацию самолета с тандемнорасположенными носовым и хвостовым винтами в вертолетоподобную конфигурацию двухвинтовой продольной схемы, осуществляется с помощью электромеханических приводов. Воздушные винты 11 и 12, имеющие возможность изменения скорости вращения, выполнены трехлопастными, лопасти трапециевидной формы в плане, угле- и стеклопластиковые, установлены в обтекателях 13. В каждом обтекателе 13 имеется спереди кок 14 для широкого диапазона изменения углов установки лопастей винтов 11 и 12. Каждый редуктор воздушного винта тянущего 11 и толкающего 12 посредством синхронизирующего вала связан с двигателем. Синхронизирующий вал, проложенный внутри фюзеляжа и вдоль плоскости симметрии, обеспечивает равномерное распределение мощности между винтами 11 и 12, при этом специальная муфта свободного хода (на фиг.1…3 не показаны) позволяет отключить двигатель при его отказе и осуществлении посадки на режиме авторотации (самовращения) винтов 11 и 12.
Для размещения целевой нагрузки - аппаратуры (фото, телевизионной и инфракрасной) для видовой разведки, телевизионного и инфракрасного наблюдения местности в реальном масштабе времени, а также широкополосного передатчика с антенной для передачи изображения по телевизионному радиоканалу на ДПВС предусмотрен отсек 15, расположенный в фюзеляже 1 и под центром масс. Возврат его в точку взлета по активизированному маршруту. В целевую его нагрузку может входить оборудование: гиростабилизированная кадровая телевизионная камера и строчный инфракрасный сканер, радиолокационная станция и аппаратура ретрансляции. Отсек целевого оборудования закрыт радиопрозрачным обтекателем. Дальность связи может составлять: по радиоканалу и прямой радиовидимости (из-за кривизны Земли) на удалении от наземного (корабельного) пульта управления до 250 и 450 км при высоте полета не ниже, соответственно, для поршневых ДПВС 4 км и для турбовинтовых - 10 км.
Киль-шайбы 7 разнесенного оперения, снабженные форкилями и установленные на консолях крыла 2, вынесены и за его заднюю кромку, смонтированы на гондолах 6, продленных и за носок крыла 2 в точки сопряжения передних кромок крыла 2 и наплывов 3. При этом в передних окончаниях каждой гондолы 6 смонтированы две телевизионные камеры 16 переднего видового обзора горизонта. При наземном и, особенно, при корабельном базировании ДПВС обе телекамеры 16 предназначены для панорамного видового обзора и истинно дистанционного пилотирования оператором с наземного (корабельного) пульта многоцелевого беспилотного вертолетно-самолетного комплекса по изображению горизонта и, особенно, палубных надстроек. Взаимное их расположение, ограничивающее обзор оператора, в большей мере приводят к усложнению проблемы посадки ДПВС на палубу корабля и требуют от него высокого мастерства. Избыточная тяговооруженность силовой установки, обеспечивающая вертикальный взлет, посадку и висение, при этом в случае отказа ее двигателя поворотные винты 11 и 12 обеспечивают посадку на режиме их авторотации, что повышает безопасность полетов. Шасси, неубирающееся, трехопорное. Главные боковые опоры с колесами 17 смонтированы по бокам короткого фюзеляжа 1 в кормовой его части, а вспомогательная опора с передним колесом 18 установлена в носовой его части.
Управление ДПВС обеспечивается общим и дифференциальным изменением шага винтов тянущего 11 и толкающего 12 и отклонением концевых частей 4 и рулевых поверхностей 5, 8, 9 и 10, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крылом 2 и передним ЦПГО 5, горизонтальная тяга - винтами 11 и 12, на режиме висения только винтами 11 и 12, на режиме перехода - крылом 2 и винтами 11 и 12. Перед вертикальным взлетом, посадкой или висением переднее ЦПГО 5 и закрылки 9 отклоняются на максимальные их углы и поворотные винты 11 и 12 поворачиваются вдоль плоскости симметрии от горизонтального положения, отклоняясь, соответственно, вверх и вниз, устанавливаются вертикально (см. фиг.2). При переходе с самолетного режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением переднего ЦПГО 5, работающего в зоне активного обдува винта 11 и создающего парирующую силу. После установки двух поворотных винтов тянущего 11 и толкающего 12 в вертикальное положение вдоль линий вертикальной их тяги осуществляется возможность вертолетных режимов полета. С приближением к поверхности земли или палубы корабля и полете вблизи них трехлопастные винты 11 и 12 образуют под ДПВС область уплотненного воздуха, создающего эффект воздушной подушки и тем самым повышающего их КПД. Поворотные винты 11 и 12 отклоняются от горизонтального положения на угол 90° и 65°, соответственно, при вертикальном взлете (посадке) и взлете с коротким разбегом (посадке с коротким пробегом). Для соответствующей посадки на поверхность земли (палубы корабля) используются колеса 17 и 18 неубирающегося шасси.
При висении на вертолетных режимах полета продольное управление ДПВС осуществляется, как у вертолета двухвинтовой продольной схемы изменением шага винтов носового 11 и хвостового 12, путевое управление - изменением крутящих моментов этих винтов 11 и 12. Поперечное управление обеспечивается незначительным отклонением вверх одной из концевых частей 4, изменяя массовую симметрию, создает момент крена Мx в сторону другой не отклоненной концевой части 4, изменяющим поперечную балансировку при висении. Отсутствие при висении перекрытия носового 11 и хвостового 12 винтов также значительно снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока.
После вертикального взлета и набора высоты для перехода на самолетный режим полета два поворотных винта 11 и 12 синхронно устанавливаются в горизонтальное положение. После чего производится горизонтальный крейсерский полет, при котором путевое управление обеспечивается рулями направления 8. Продольное и поперечное управление может осуществляться отклонением соответственно рулевых поверхностей - переднего ЦПГО 5 и элеронов 10. При полетной конфигурации ДПВС на самолетных режимах полета тянущий винт 11 имеет взаимно противоположное вращение с толкающим винтом 12 для создания горизонтальной тяги, тем самым создает значительное повышение эффективности винтомоторной группы. При его полетной вертолетоподобной конфигурации двухвинтовой продольной схемы реактивные моменты от поворотных винтов 11 и 12, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения.
Таким образом, многоцелевой ДПВС, выполненный по аэродинамической схеме «утка» с разнесенным двухкилевым оперением и тандемнорасположенными поворотными винтами, представляет собой конвертоплан. Причем возможность его вертикального взлета и посадки позволяет исключить старт с катапульты, амортизационную посадку на парашюте, требующую специального оборудования для сушки, прессовки и повторной его укладки, а также значительно повысить кратность применения одного ДПВС. При этом отсутствие в его конструкции автомата перекоса для управления циклическим шагом винтов, используемых как несущие винты вертолета двухвинтовой продольной схемы, значительно упрощает и удешевляет его изготовление и эксплуатацию. Что также уменьшает объем регламентных работ и, самое главное, исключает вредные вибрации, создающие неблагоприятные условия для работы других механизмов и снижающие разрешающую способность аэрофотосъемочной и телевизионной аппаратуры, особенно ТВ камеры, т.к. от вибрации уже никакими самыми продвинутыми способами обработки ТВ сигнала утраченную разрешающую способность реально не восстановить. Поэтому тандемнорасположенные поворотные винты с жестким креплением лопастей, создающие вертикальную и соответствующим отклонением горизонтальную тягу, обеспечивают как необходимые управляющие моменты, так и высокое качество ТВ сигнала. Кроме того, на самолетных режимах полета ДПВС тандемнорасположенные винты значительно усиливают и интенсивное обтекание носовой части фюзеляжа, включая и наплывы крыла, обеспечивающие высокие несущие свойства при маневрировании на больших углах атаки без сваливания в штопор. При этом его конвертируемая аэродинамическая компоновка моноплана с ЦПГО и поворотными винтами позволяет также существенно улучшить штопорные характеристики и снизить потери аэродинамического качества на балансировку ДПВС, т.к. ЦПГО находится впереди крыла, работая совместно с ним, создает дополнительную подъемную силу и разгружает крыло. Что предопределяет легко реализовать возможность как короткого взлета и посадки, так и, очевидно, короткого взлета и вертикальной посадки. Последнее, весьма, важно при корабельном базировании, т.к. обеспечивает взлет (с максимальной - удвоенной целевой нагрузкой) и вертикальную посадку пустого ДПВС на палубу. Все это повышает эксплуатационные возможности ДПВС и обеспечивает их использование как вертолета и самолета на любых неподготовленных поверхностях земли, т.е. безаэродромное базирование, так и их базирование на аэродромах и, особенно, на кораблях. Поэтому ДПВС, входящие в состав многоцелевого беспилотного вертолетно-самолетного комплекса, могут быть выполнены в наземно-мобильном, аэромобильном и корабельном исполнении.
В настоящее время широкое практическое применение поршневых ДПВС для гражданских нужд и вероятными областями их использования могут являться: доставка экстренных грузов специального назначения, экологический мониторинг и патрулирование нефте- и газопроводов, патрулирование транспортных магистралей и охраняемых территорий, противопожарный мониторинг лесных массивов, торфяников и сельхозугодий, трансляции и ретрансляции информации. Корабельное базирование ДПВС позволяет широко применять их и для ледовой разведки, и разведки моря для навигационной проводки судов, а также для патрулирования территориальных вод, наблюдения за важными объектами в системе охраны экономической зоны, рыбоохраны и др.
Очевидно то, что, оснастив силовую установку такого ДПВС турбовинтовым двигателем и выполнив стойки трехопорного его шасси убирающимися, становится возможным как достижение максимальной скорости на самолетных режимах его полета до 830 км/ч, так и высоты полета до 10 км. Поэтому, именно, турбовинтовые ДПВС могут обеспечить увеличение тяговооруженности, относительной тяги их силовой установки и реализовать возможность в блочно-модульной его конструкции предусмотреть и варианты исполнений пилотируемых турбовинтовых вертолетов-самолетов.
Причем при поисково-разведывательных операциях, когда требуются и длительное нахождение в режиме висения и дальности, и высокие скорости полета, а также, зачастую, и требования корабельного базирования, то, очевидно, незаменимым могло быть использование, именно, турбовинтовых ДПВС, как одного из наиболее перспективного вида преобразуемой винтокрылой беспилотной палубной авиации. При этом, беря во внимание стоимость таких ДПВС и пилотируемых вертолетов и эксплуатационные затраты при их использовании для этих целей, разница стоимости летного часа турбовинтовых ДПВС и пилотируемых палубных вертолетов соосной схемы на порядки несоизмерима, и она не в пользу последних.
Источники информации
1. Егер С.М. Основы авиационной техники. М.: Машиностроение. 2003 г., 720 с.
2. Научно-популярный журнал ВВС. Авиация и космонавтика. №3. 2001 г., с.37.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2448869C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С КАНАЛЬНЫМИ ВИНТАМИ | 2016 |
|
RU2629473C1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
Изобретение относится к области авиационной техники и может быть использовано в конструкции дистанционно пилотируемых вертолетов-самолетов, совмещающих особенности вертолетов и самолетов. Вертолет-самолет, представляющий собой моноплан с наплывами, разнесенным двухкилевым вертикальным и горизонтальным оперением, содержит фюзеляж, силовую установку, отсек для целевой нагрузки, трехстоечное колесное шасси. Вертолет-самолет снабжен возможностью преобразования его полетной конфигурации с вертолета двухвинтовой продольной схемы в полетную конфигурацию самолета с расположенными тандемом носовым и хвостовым, соответственно, тянущим и толкающим винтами и обратно. Дополнительно оснащен носовым редуктором, выходной вал которого снабжен возможностью его поворота с тянущим винтом относительно оси редуктора вверх от горизонтального положения вдоль плоскости симметрии, а выходной вал хвостового редуктора с толкающим винтом - вниз синхронно носовому. Горизонтальные оси выходных валов носового и хвостового редукторов смонтированы на разных уровнях. В передних окончаниях каждой гондолы смонтированы две телевизионные камеры переднего панорамного видового обзора горизонта, обеспечивающие условия истинно дистанционного пилотирования оператором. Трансмиссия оснащена синхронизирующим валом, проложенным внутри фюзеляжа и вдоль плоскости симметрии, обеспечивающим равномерное распределение мощности между носовым и хвостовым винтами. Достигается повышение взлетного веса и увеличение весовой отдачи, упрощение конструкции, повышение эксплуатационных характеристик и показателей транспортной эффективности, а также максимальной крейсерской скорости полета и аэродинамической эффективности, упрощение продольного управления при висении и улучшение взлетно-посадочных характеристик. 3 ил.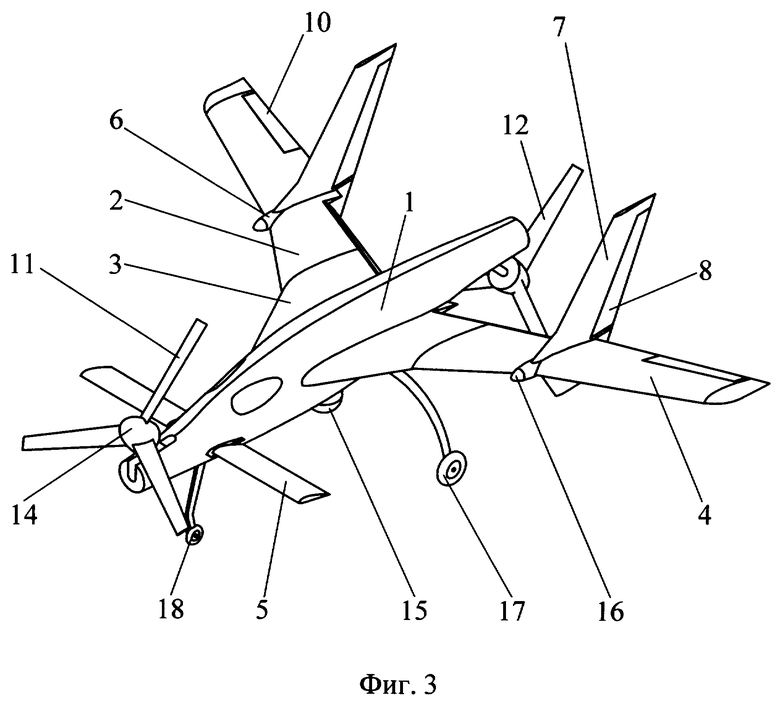
Многоцелевой дистанционно пилотируемый вертолет-самолет, представляющий собой моноплан с горизонтальным оперением и со среднерасположенным трапециевидным крылом, имеющим впереди его наплывы, содержащий короткий фюзеляж, силовую установку, включающую двигатель, редуктор и с задним расположением поворотные винты, обеспечивающие горизонтальную тягу и соответствующим отклонением между разнесенным двухкилевым оперением вертикальную или наклонную тягу, отсек для целевой нагрузки, расположенный в фюзеляже под центром масс, трехстоечное колесное шасси, неубирающееся с передней носовой опорой, отличающийся тем, что он снабжен возможностью преобразования его полетной конфигурации с вертолета двухвинтовой продольной схемы в полетную конфигурацию самолета с расположенными тандемом носовым и хвостовым соответственно тянущим и толкающим винтами и обратно, при этом удобообтекаемой формы фюзеляж, имеющий разноуровневые носовую и хвостовую его части и представляющий собой в плоскости симметрии S-образный профиль, дополнительно оснащен носовым редуктором, выходной вал которого снабжен возможностью его поворота с тянущим винтом относительно оси редуктора вверх от горизонтального положения вдоль плоскости симметрии, а выходной вал хвостового редуктора с толкающим винтом - вниз синхронно носовому, причем горизонтальные оси выходных валов носового и хвостового редукторов, смонтированных на разных уровнях, расположены относительно плоскости средней линии крыла соответственно ниже и вдоль последней, при этом горизонтальная ось выходного вала носового редуктора размещена вдоль плоскости средней линии цельноповоротного горизонтального оперения, смонтированного перед наплывами, имеющими в плане V-образные изломы, образующие переменную стреловидность по передним их кромкам и объединяющие фюзеляж и крыло в единую плавнообразованную конструкцию, киль-шайбы хвостового оперения, установленные на консолях крыла, вынесены и за его заднюю кромку смонтированы на гондолах, продленных и за носок крыла в точки сопряжения передних кромок крыла и наплывов, при этом в передних окончаниях каждой гондолы смонтированы две телевизионные камеры переднего панорамного видового обзора горизонта, обеспечивающие условия истинно дистанционного пилотирования оператором, трансмиссия оснащена синхронизирующим валом, проложенным внутри фюзеляжа и вдоль плоскости симметрии, обеспечивающим равномерное распределение мощности между носовым и хвостовым винтами.
| DE 3917499 A1, 06.12.1990 | |||
| ТЕПЛИЦА | 1968 |
|
SU418998A3 |
| US 2003094537 A1, 22.05.2003 | |||
| Самолет вертикального ультракороткого взлета и посадки | 1989 |
|
SU1839153A1 |
| Вертолет продольной схемы | 1975 |
|
SU645540A3 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1997 |
|
RU2132289C1 |
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 1994 |
|
RU2089456C1 |

