Изобретение относится к области неразрушающих средств досмотра различных видов транспорта, легких сооружений, багажа, основанных на использовании рентгеновского излучения. Принцип действия заявленного способа основан на регистрации ионизирующего излучения, рассеянного объектом досмотра в сторону источника, что позволяет размещать все оборудование установки с одной стороны от объекта, и, следовательно, проводить процедуру досмотра скрытно. Важным преимуществом технологии такого типа досмотра является принципиальная возможность получения изображения объектов за преградой. В случае наличия оптически непроницаемой преграды (стенки фургона, тары, элементы обшивки, кузовные детали) проникающее зондирующее излучение рассеивается в основном от массивных объектов, что позволяет игнорировать рассеяние от тонких преград при анализе рентгенографического изображения.
В большинстве случаев известные способы основаны на обратном рассеянии (BackScatter) и предназначены для построения плоского изображения объекта досмотра, где развертка осуществляется за счет взаимного перемещения пучка зондирующего излучения и объекта досмотра. Классическая система BackScatter подразумевает использование представления интенсивности зарегистрированного излучения, характеризующего способность фрагмента объекта (пикселя изображения) рассеивать излучение зондирующего пучка. В предлагаемом изобретении изображение может быть охарактеризовано дополнительным параметром – пространственным профилем рассеивающей поверхности объекта (известным как псевдо-3D), причем без изменения процедуры досмотра.
Известен способ дистанционного контроля [1], позволяющий проводить дистанционный (скрытый) досмотр. Известный способ реализуется за счет формирования тонкого игольчатого пучка рентгеновского излучения, направленного в сторону объекта досмотра, регистрации рассеянного рентгеновского излучения, на основании интенсивности которого формируется рентгенографическое изображение-образ объекта досмотра. Однако известным способом затруднительно точно оценить пространственный профиль досматриваемого объекта.
Известен способ для построения трехмерного изображения поверхности объекта [2]. В этом патенте объект исследования попеременно облучается двумя зондирующими лучами, а обратно-рассеянное излучение регистрируется детектором. Объемное изображение формируется за счет того, что синхронно с вращением коллиматоров зондирующие пучки ограничиваются прерывателями, в результате чего информация о пикселях изображения формируется пучками, прошедшими разный геометрический путь по толще объекта. Необходимость прецизионного взаимного перемещения досматриваемого объекта относительно коллиматоров существенно усложняет процесс построения трехмерного профиля объекта и делает невозможным его скрытое проведение, а использование двух источников излучения повышает трудоемкость использования такого способа.
Известен способ в виде системы построения 3D изображения на обратном рассеянии [3]. Описанная в этом патенте технология позволяет получать трехмерное изображение объекта за счет того, что детектор оснащен коллиматором, позволяющим ему независимо регистрировать рассеянное излучение, формируемое на разных глубинах объекта. Однако реализация известного способа является трудоемкой из-за необходимости независимого перемещения источника и детектора относительно объекта с целью получения многих ракурсов, представляющих информацию, достаточную для реконструкции формы объекта. Кроме того, использование коллиматоров снижает эффективность регистрации обратно рассеянного излучения, что приводит к увеличению времени и дозы поглощенного излучения для получения изображения удовлетворительного качества.
Известен способ на обратном рассеянии рентгеновского излучения, предназначенный для визуализации формы объекта досмотра, наиболее близкий к заявленному изобретению, описанный в патенте [4] и принятый в качестве прототипа. Известный способ относится к области рентгеновской техники и предназначен для проведения досмотра и обнаружения скрытых объектов с возможностью определения пространственного профиля инспектируемого объекта. Принцип действия известного способа основан на использовании импульсного источника ионизирующего излучения, генерирующего зондирующий пучок, и времяпролетной технологии (time-of-flight method). Функционирование известного способа осуществляется за счет измерения временных интервалов от момента подачи импульса облучения, по результатам которого на основании данных о фазе вращающегося коллиматора, времени пролета рассеянного излучения до различных детекторов восстанавливается положение точки рассеяния.
К недостаткам прототипа для определения пространственного профиля объекта досмотра относятся:
- низкое качество изображения предметов, находящихся за оптически непроницаемой преградой, отделяющей объект досмотра от установки (экран, тара, кузов, обшивка) вследствие шума, обусловленного тем, что кванты, отраженные от преграды, создают ложные сигналы временной привязки;
- необходимость использования сложного и дорогостоящего источника импульсного излучения, генерирующего импульсы излучения с фронтами суб-наносекундной длительности с частотой порядка 100 кГц;
- высокая стоимость установки, так, например, для получения качественного рентгенографического изображения на установках на обратном рассеянии требуется большая площадь чувствительной поверхности детекторов, порядка единиц квадратных метров. Вместе с тем, для получения приемлемого временного разрешения требуются единичные кристаллы минимального размера (не более единицы сантиметров), чтобы флуктуации времени сбора сцинтилляционного сигнала вносили минимальные искажения в сигнал временной метки. Совместно эти два условия приводят к тому, что массивы детекторов должны включать сотни дискретных детекторов, что существенно усложняет электронный тракт системы и повышает цену установки.
Заявленный способ определения пространственного профиля инспектируемого объекта свободен от указанных недостатков.
Техническим результатом заявляемого способа является существенное расширение области проведения досмотра обследуемых объектов, скрытых за оптически непроницаемой преградой с высоким качеством изображения, применение серийных промышленно выпускаемых источников рентгеновского излучения, работающих в непрерывном режиме, и использование значительно меньшего числа дискретных детекторов со значительно большей чувствительной площадью каждого из них, что сокращает трудозатраты, связанные с реализуемым способом и его себестоимостью.
Указанный технический результат достигается за счет заявленного способа определения пространственного профиля в досмотровой установке, который основан на облучении инспектируемого объекта узким зондирующим пучком рентгеновского излучения, регистрации обратно рассеянного излучения детекторами ионизирующего излучения, в котором, в соответствии с заявленным изобретением, логические сигналы от каждого детектора ионизирующего излучения накапливают в системе синхронизации и интерфейсов за время формирования одиночного пикселя рентгенографического изображения синхронно с перемещением зондирующего пучка по поверхности инспектируемого объекта, данные, сформированные в рамках одного пикселя рентгенографического изображения, из системы синхронизации и интерфейсов поступают в процессор, при этом для каждого пикселя рентгенографического изображения сигналы от разных детекторов ионизирующего излучения объединяют в группы, на базе сигналов от каждой группы вычисляют разностный и суммарный сигнал, и по величине и знаку их отношения производят расчет компоненты вектора нормали рассеивающей поверхности, после чего формируют псевдо-пространственный профиль инспектируемого объекта на устройстве визуализации путем отображения компоненты вектора нормали с помощью светотеневого кодирования пикселя.
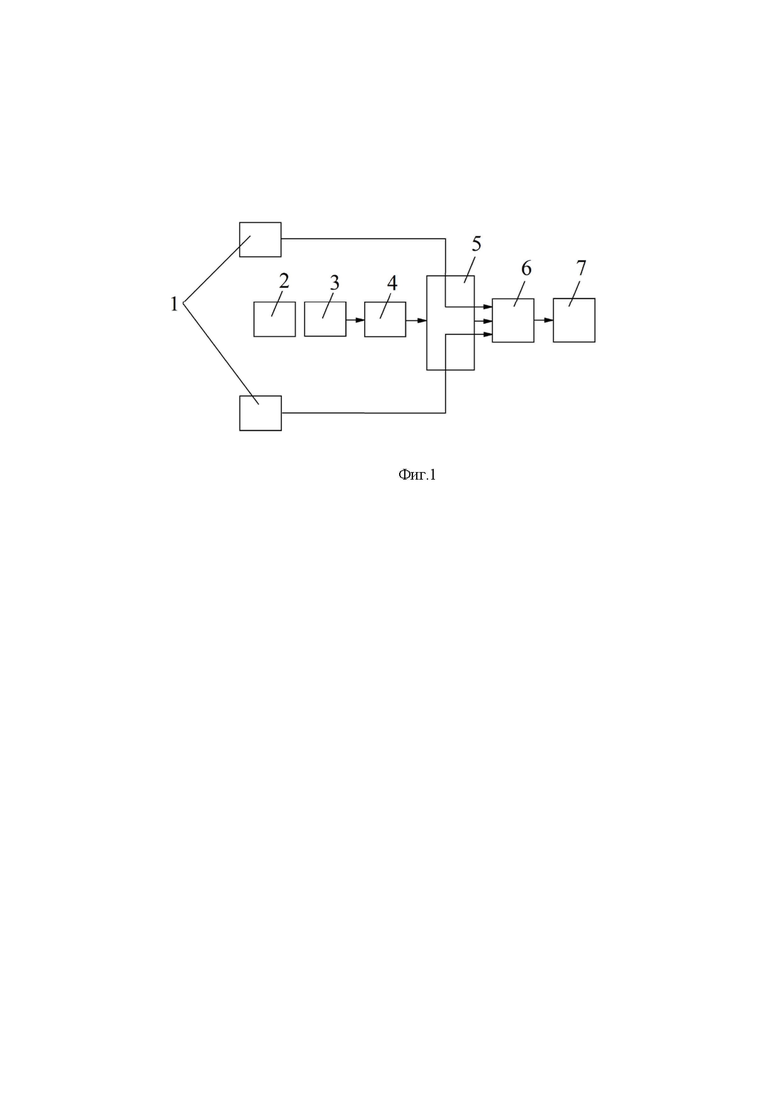
Практическая реализация способа поясняется Фиг. 1, на которой представлена схема досмотровой установки, состоящей из массива идентичных детекторов ионизирующего излучения 1, источника рентгеновского излучения 2, размещенного во вращающемся коллиматоре 3. На вращающемся коллиматоре установлен датчик угла поворота 4. Все детекторы 1, а также датчик угла поворота 4 подключаются к системе синхронизации и интерфейсов 5, которая соединена высокопроизводительным логическим электронным интерфейсом с процессором 6. Процессор 6 подключен к устройству для отображения результатов досмотра 7.
Заявленный способ реализуется следующим образом. Источник рентгеновского излучения 2 с коллиматором 3 формируют узкий зондирующий пучок рентгеновского излучения. Излучение зондирующего пучка попадает на объект досмотра и рассеивается, в том числе в направлении детекторов 1. Логический сигнал от детекторов 1 поступает в систему синхронизации и интерфейсов 5 и накапливаются синхронно с перемещением зондирующего пучка. Накопленные данные передаются в процессор 6 для синтеза изображения объекта для его последующей визуализации на устройстве для отображения результатов досмотра 7.
Заявленный способ позволяет независимо измерять интенсивность рассеянного излучения разнесенными в пространстве детекторами, что обеспечивает возможность извлечения дополнительной информации о профиле объекта за счет определения пространственных характеристик поля рассеянного излучения. Такая возможность предоставляет проводить заявленным способом не только эффективную оценку рассеивающей способности фрагментов объекта, но и учитывать их форму и/или взаимное расположение, т.е. предоставляет принципиальную возможность получать представление о пространственной форме объекта досмотра (псевдо-3D). Основным преимуществом использования системы визуализации псевдо-3D профиля досматриваемого объекта является возможность различения объектов, имеющих одинаковую проекцию на плоскость при построении изображения. Действительно, проекции многих трехмерных объектов на плоскость имеют схожий вид. Также действительная яркость элемента объекта на плоском изображении может быть сильно искажена за счет поглощения рассеянного излучения объектами, стоящими на переднем плане. В таком случае комбинированное использование классического рентгенографического изображения и изображения, характеризующего пространственный псевдо-3D профиль объекта, способствует качественному улучшению информативности изображения и повышению достоверности процедуры досмотра.
Проведенные лабораторные исследования подтвердили указанный технический результат, достижение которого демонстрируется приведенным ниже конкретным примером реализации.
Пример
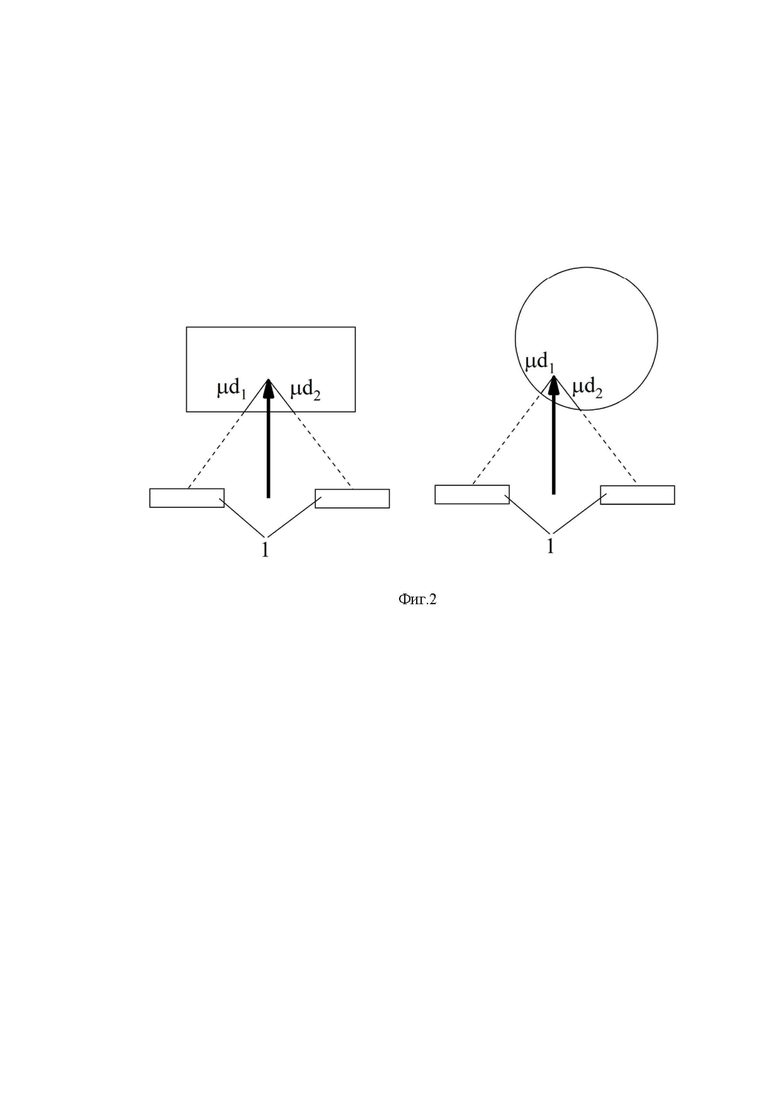
На Фиг. 2 проиллюстрирован конкретный пример обследования объектов, имеющих форму цилиндра и параллелепипеда.
При облучении фронтальной грани параллелепипеда, обращённой к досмотровой установке, поле излучения будет однородным так как кванты, рассеянные в детекторы, расположенные слева и справа от зондирующего пучка, проходят по материалу объекта одинаковый путь и, следовательно, испытывают одинаковое ослабление. Если досматривается объект цилиндрической формы, то поле рассеянного излучения будет однородным только при облучении его центральной части. В противном случае в зависимости от того, левая или правая сторона цилиндра облучается, будет регистрироваться больший сигнал рассеянного излучения в детекторах, расположенных по левую или правую сторону от зондирующего пучка.
Ниже приведен возможный вариант реализации изобретения в виде алгоритма визуализации пространственного профиля реальных объектов с помощью светотеневого представления. Для этого сконструирован знакопеременный критерий, отражающий ориентацию (за счет знака) и величину проекции нормали (за счет амплитуды) фрагмента рассеивающей поверхности, вида:
Nx=(IL-IR)/(IL+IR),
где IL и IR – интенсивности рассеянного излучения, зарегистрированные по правую и левую стороны от зондирующего луча соответственно. Очевидно, что сконструированному критерию соответствует диапазон возможных значений от «-1» до «1», хотя практические измерения показывают, что действительный диапазон возможных значений критерия умещается в интервал [-0.5; 0.5].
На Фиг. 3 (а, б и в) приведены изображения реальных предметов, отвечающие графическому представлению значения признака положения нормали Nx, где минимальному значению признака соответствует черный цвет пикселя, а максимальному - белый. Эти же объекты, визуализированные в классическом для установки на обратном рассеянии представлении, когда яркость пикселя обусловлена суммарной интенсивностью рассеянного излучения вида:
Int=IL+IR,
представлены на Фиг. 3 (г, д и е).
На Фиг. 3 (а, б и в) видно, что предложенный алгоритм вырабатывает признак, который обозначает области рентгенографического изображения, соответствующие фрагментам объекта, создающим неоднородное поле рассеянного излучения. При этом асимметрия имеет взаимно-однозначную связь с направлением нормали объекта.
Типичные изображения, приведенные на Фиг. 3 могут быть представлены оператору установки как по отдельности, так и совместно парами: (а и г), (б и д), (в и е). Совместное представление изображений, составляющих пары, возможно, с помощью известных моделей, используемых в программах 3D моделирования и компьютерной графики, например, таких как закон косинуса Ламберта. В этом случае способ определения псевдо-3D профиля позволяет оценить для каждого фрагмента объекта положение нормали. Композиция слоев плоского изображения, в которых известны и яркости, и форм-факторы объектов, совместно являются так называемой сценой [5]. Визуализация сцены на дисплее осуществляется за счет приобретения объектами сцены светотеневого контура, типичного для объемных объектов при их освещении обычным источником света, где положение источника является динамическим параметром представления.
Технико-экономическая эффективность заявленного способа состоит в повышении его надежности, снижении стоимости его практической реализации и увеличении достоверности досмотра за счет повышения качества синтезируемого изображения.
Изобретение может быть использовано как в целях обеспечения безопасности при осуществлении досмотра движимых и недвижимых объектов, в частности, автомобильном транспорте, легких строениях, транспортных контейнерах, багажах и других объектах, так и для промышленных целей при анализе приповерхностных слоев объектов на предмет инородных включений и/или дефектов.
Список использованной литературы
1. Патент RU 145 863 (13) U1, МПК H05G 1/00 (2006.01).
2. Патент US 9,989,483 B2, МПК G01N 23/20.
3. Патент US 9,442,083 B2, МПК G01N 23/20.
4. Патент US 9,128,198 B2, МПК G01N 23/203 (прототип).
5. Buss S., Buss S. R. 3D computer graphics: a mathematical introduction with OpenGL. - Cambridge University Press, 2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| Досмотровая установка и способ распознавания вещественного состава досматриваемого объекта | 2022 |
|
RU2788304C1 |
| Система досмотра транспортных средств, перемещающихся своим ходом, включая находящихся в транспортных средствах грузы, пассажиров и водителя, способ автоматического радиоскопического контроля движущихся объектов и зоны радиационного сканирования и способ формирования теневого изображения инспектируемого объекта | 2018 |
|
RU2716039C1 |
| СПОСОБ ДОСМОТРА И ДОСМОТРОВЫЙ КОМПЛЕКС | 2012 |
|
RU2512679C1 |
| УСТРОЙСТВО И СПОСОБ ДОСМОТРА ОБЪЕКТОВ | 2005 |
|
RU2444723C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ С ИСПОЛЬЗОВАНИЕМ РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ И ФОТОНЕЙТРОНОВ | 2008 |
|
RU2415404C1 |
| МИШЕНЬ, ПРЕОБРАЗУЮЩАЯ ИЗЛУЧЕНИЕ В ФОТОНЕЙТРОНЫ | 2008 |
|
RU2406171C1 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2019 |
|
RU2715813C1 |
| МИШЕНЬ, ПРЕОБРАЗУЮЩАЯ ИЗЛУЧЕНИЕ В ФОТОНЕЙТРОНЫ, И ИСТОЧНИК РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ И ФОТОНЕЙТРОНОВ | 2008 |
|
RU2408942C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ ПРОСВЕЧИВАНИЯ ИЗЛУЧЕНИЕМ ПОД РАЗНЫМИ УГЛАМИ | 2007 |
|
RU2400735C2 |
| СТАЦИОНАРНЫЙ ДОСМОТРОВЫЙ КОМПЛЕКС | 2016 |
|
RU2623835C1 |

Использование: для определения пространственного профиля инспектируемого объекта. Сущность изобретения заключается в том, что осуществляют облучение инспектируемого объекта узким зондирующим пучком рентгеновского излучения, регистрацию обратно рассеянного излучения детекторами ионизирующего излучения, при этом логические сигналы от каждого детектора ионизирующего излучения накапливают в системе синхронизации и интерфейсов за время формирования одиночного пикселя рентгенографического изображения синхронно с перемещением зондирующего пучка по поверхности инспектируемого объекта, данные, накопленные в рамках одного пикселя рентгенографического изображения направляют в процессор, для каждого пикселя рентгенографического изображения сигналы от разных детекторов ионизирующего излучения объединяют в группы, на базе сигналов от каждой группы вычисляют разностный и суммарный сигнал, и по величине и знаку их отношения производят расчет компоненты вектора нормали рассеивающей поверхности, после чего формируют псевдо-пространственный профиль инспектируемого объекта на устройстве визуализации путем отображения компоненты вектора нормали с помощью светотеневого кодирования пикселя. Технический результат: обеспечение возможности получения пространственного псевдо-3D профиля объекта досмотра высокого качества. 3 ил.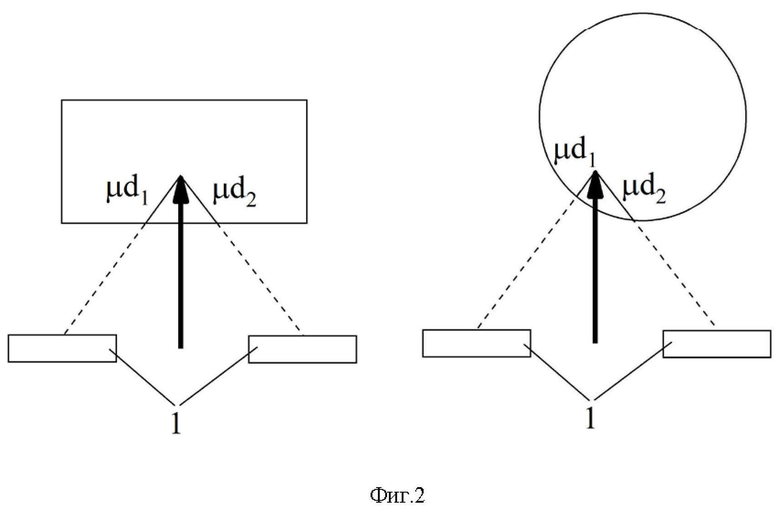
Способ определения пространственного профиля инспектируемого объекта в досмотровой установке на обратном рассеянии, включающий облучение инспектируемого объекта узким зондирующим пучком рентгеновского излучения, регистрацию обратно рассеянного излучения детекторами ионизирующего излучения, отличающийся тем, что логические сигналы от каждого детектора ионизирующего излучения накапливают в системе синхронизации и интерфейсов за время формирования одиночного пикселя рентгенографического изображения синхронно с перемещением зондирующего пучка по поверхности инспектируемого объекта, данные, накопленные в рамках одного пикселя рентгенографического изображения, направляют в процессор, для каждого пикселя рентгенографического изображения сигналы от разных детекторов ионизирующего излучения объединяют в группы, на базе сигналов от каждой группы вычисляют разностный и суммарный сигнал, и по величине и знаку их отношения производят расчет компоненты вектора нормали рассеивающей поверхности, после чего формируют псевдо-пространственный профиль инспектируемого объекта на устройстве визуализации путем отображения компоненты вектора нормали с помощью светотеневого кодирования пикселя.
| US 2020386904 A1, 10.12.2020 | |||
| US 7620150 B1, 17.11.2009 | |||
| US 2009268871 A1, 29.10.2009 | |||
| УСТРОЙСТВО И СПОСОБ ДОСМОТРА ОБЪЕКТОВ | 2005 |
|
RU2444723C2 |
| УСОВЕРШЕНСТВОВАННАЯ СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ДОСМОТРА ЛЮДЕЙ | 2008 |
|
RU2523771C2 |
| US 6324249 B1, 27.11.2001 | |||
| US 2014205066 A1, 24.07.2014. | |||

